Как работает понижающий преобразователь напряжения. Какие компоненты входят в его состав. Как рассчитать и выбрать индуктивность, конденсаторы, диод и транзистор для преобразователя. На что обратить внимание при проектировании.
Принцип работы понижающего преобразователя напряжения
Понижающий преобразователь (также известный как buck converter или step-down converter) — это импульсный источник питания, который преобразует более высокое входное напряжение в более низкое стабилизированное выходное напряжение. Основными компонентами понижающего преобразователя являются:
- Силовой ключ (обычно MOSFET-транзистор)
- Диод
- Катушка индуктивности
- Входной и выходной конденсаторы
- Схема управления
Принцип работы понижающего преобразователя основан на периодическом накоплении энергии в индуктивности и передаче ее в нагрузку. Когда ключ замкнут, ток через индуктивность нарастает, накапливая в ней энергию. При размыкании ключа накопленная энергия передается в нагрузку через диод.
Расчет и выбор индуктивности
Индуктивность является ключевым элементом понижающего преобразователя. Ее величина влияет на пульсации тока и переходные процессы. Для расчета индуктивности используется формула:
L = (Vin — Vout) * (Vout / Vin) * (1 / (fsw * LIR * Iout))
Где: — Vin — входное напряжение — Vout — выходное напряжение — fsw — частота переключения — LIR — коэффициент пульсаций тока индуктивности (обычно 0.3) — Iout — выходной ток
При выборе индуктивности необходимо учитывать ее ток насыщения и активное сопротивление. Ток насыщения должен быть выше пикового тока через индуктивность с запасом 20-30%.
Выбор выходного конденсатора
Выходной конденсатор сглаживает пульсации выходного напряжения. Его емкость определяется допустимой величиной выброса напряжения при скачке нагрузки:
Co = (L * Iout^2) / (2 * Vout * ΔV)
Где ΔV — допустимый выброс напряжения.
Важным параметром выходного конденсатора является эквивалентное последовательное сопротивление (ESR). Оно влияет на величину пульсаций выходного напряжения:
Vripple = (Vin — Vout) * (Vout / Vin) * (1 / (L * fsw^2)) + ΔIL * ESR
Где ΔIL — размах пульсаций тока индуктивности.
Расчет и выбор входного конденсатора
Входной конденсатор сглаживает пульсации входного тока. Его емкость обычно выбирается из расчета 10-22 мкФ на 1 А выходного тока. Пульсирующий ток через входной конденсатор рассчитывается по формуле:
Ic(rms) = Iout * sqrt((Vout/Vin) * (1 — Vout/Vin))
Максимальное значение этого тока достигается при Vin = 2*Vout и составляет 0.5*Iout.
Выбор диода
При выборе диода необходимо учитывать следующие параметры:
- Максимальное обратное напряжение — должно быть выше максимального входного напряжения
- Максимальный прямой ток — должен быть выше максимального выходного тока
- Падение напряжения в прямом направлении — влияет на КПД
- Рассеиваемая мощность — рассчитывается как Pd = (1-D)*Iout*Vf, где D — коэффициент заполнения, Vf — прямое падение напряжения
Обычно используются диоды Шоттки из-за низкого прямого падения напряжения.
Выбор силового ключа
Основные параметры при выборе силового MOSFET-транзистора:

- Максимальное напряжение сток-исток — должно быть выше максимального входного напряжения с запасом 20-30%
- Максимальный ток стока — должен быть выше максимального выходного тока с запасом 50-100%
- Сопротивление канала в открытом состоянии RDS(on) — влияет на потери проводимости
- Заряд затвора — влияет на динамические потери при переключении
- Тепловое сопротивление корпуса — влияет на максимальную рассеиваемую мощность
Потери мощности в ключе складываются из статических и динамических потерь:
Ptot = Pstat + Pdyn = Iout^2 * RDS(on) * D + 0.5 * Vin * Iout * (tr + tf) * fsw
Где tr и tf — времена нарастания и спада тока при переключении.
Особенности проектирования понижающих преобразователей
При разработке понижающих преобразователей необходимо учитывать следующие моменты:
- Выбор оптимальной частоты переключения — компромисс между размерами компонентов и КПД
- Минимизация паразитных индуктивностей в силовых цепях для уменьшения выбросов напряжения
- Правильная трассировка силовых и сигнальных цепей для уменьшения помех
- Выбор компонентов с учетом температурных режимов работы
- Обеспечение устойчивости системы регулирования
Правильный расчет и выбор компонентов позволяет спроектировать эффективный и надежный понижающий преобразователь напряжения.
Анализ работы понижающего преобразователя
Для анализа работы понижающего преобразователя рассмотрим его основные режимы:
Режим непрерывных токов
В этом режиме ток через индуктивность никогда не спадает до нуля. Коэффициент заполнения D определяется отношением выходного напряжения к входному:
D = Vout / Vin
Пульсации тока индуктивности:
ΔIL = (Vin — Vout) * D / (L * fsw)
Режим прерывистых токов
Возникает при малых нагрузках, когда ток индуктивности успевает спадать до нуля. В этом режиме:
D = sqrt(2 * L * Iout * fsw / Vin)
Vout = Vin * D^2 / (D^2 + 2 * L * Iout * fsw / Vin)
Режим прерывистых токов обычно нежелателен, так как ухудшает стабилизацию выходного напряжения.
Методы улучшения характеристик понижающих преобразователей
Для улучшения характеристик понижающих преобразователей применяются следующие методы:
- Синхронное выпрямление — замена диода на MOSFET для уменьшения потерь
- Многофазные преобразователи — для увеличения выходного тока и уменьшения пульсаций
- Адаптивное управление — изменение частоты и режима работы в зависимости от нагрузки
- Мягкое переключение — уменьшение динамических потерь в ключе
- Активная компенсация выходного импеданса — для улучшения переходных характеристик
Применение этих методов позволяет создавать высокоэффективные понижающие преобразователи с отличными динамическими характеристиками.

Импульсный понижающий преобразователь напряжения
Всем доброго времени суток! Сегодня начнём серию статей об импульсных источниках питания. Широкое распространение данного типа источников питания связанно со стремлением уменьшить массогабаритные характеристики реактивных элементов: трансформаторов, дросселей и конденсаторов.
Основное отличие импульсных источников питания от линейных (или непрерывного действия) заключается в том, что регулирующий элемент, чаще всего транзистор, работает в ключевом режиме (режиме переключений). То есть большую часть периода работы находится в области отсечки или насыщения, а в активной зоне находится только в момент переключения. Следовательно, средняя за период мощность на рассеиваемая транзисторе будет значительно меньше, чем при работе в линейном режиме. Таким образом, импульсные источники питания по сравнению с линейными имеют более высокий КПД и меньшую массу и размеры.
Для сборки радиоэлектронного устройства можно преобрески DIY KIT набор по ссылке.
Первым типом импульсного источника питания, который мы рассмотрим, будет, понижающий преобразователь напряжения.
Схема импульсного понижающего преобразователя
Импульсный преобразователь понижающего типа, в зарубежной литературе имеет название: chopper, buck converter, step-down converter. Он широко применяется в электронных схемах вместо линейных стабилизаторов, которые при токах более 2…3 А имеют уже значительные размеры и невысокое КПД, при этом имеют сопоставимые габариты и малую массу.
Например, для серии стабилизаторов КР142ЕНХХ, при мощностях рассеивания более 1 Вт необходимо использовать радиатор охлаждения, который при 10 Вт рассеиваемой мощности и 50 ℃ рабочей температуры должен иметь площадь не менее 100 см2.
Из недостатков импульсных преобразователей можно отметить усложнение схемы управления, увеличенный уровень помех и пульсаций напряжения, а также ухудшение динамических характеристик.
Схема понижающего преобразователя представлена ниже
Схема импульсного стабилизатора понижающего типа.
На данной схеме приведены основные элементы понижающего стабилизатора. Входной фильтр CВХ осуществляет фильтрацию входного напряжения, которое подаётся на ключевой элемент, в данном случае биполярный транзистор VT. В момент открытия транзистора VT входное напряжение передается в нагрузку и на увеличение энергии в дросселе L. При размыкании ключа на транзисторе VT в дросселе возникает ЭДС, открывающая диод VD, а на разомкнутом транзисторе возникает напряжение равное ЭДС. Энергия, накопленная в дросселе, частично поступает в нагрузку, создавая на выходном сопротивлении RH некоторое выходное напряжение UВЫХ. Сглаживание пульсаций выходного напряжения, из-за пульсаций тока дросселя, осуществляется конденсатором фильтра СФ.
Наличие схемы управления СУ позволяет получить заданное выходное напряжение на нагрузке и его стабильность. Подключение входа управления к нагрузке осуществляется для получения сигнала рассогласования в цепи обратной связи, а его выхода – к ключевому элементу для управления его включением и выключением. Стабилизация напряжения на нагрузке осуществляется путём изменения скважности импульсов перед сглаживающим фильтром.
Стабилизация напряжения на нагрузке осуществляется путём изменения скважности импульсов перед сглаживающим фильтром.
В данной схеме выходное напряжение всегда меньше входного, так как при открытом транзисторе энергия от источника питания передаётся в нагрузку и одновременно накапливается в дросселе и конденсаторе. А при закрытом ключевом транзисторе накопленная энергия в дросселе и конденсаторе фильтра поступает в нагрузку, причем энергия дросселя идёт в нагрузку через диод, называемым разрядным.
В зависимости от параметров схемы импульсный преобразователь может работать в двух режимах работы: режиме непрерывных токов и режиме прерывистых токов, протекающих через дроссель. Рассмотрим их подробнее.
Работа понижающего преобразователя в режиме непрерывных токов дросселя
Цикличность работы импульсного понижающего преобразователя в режиме непрерывных токов дросселя можно описать с помощью следующей диаграммы токов и напряжений
Диаграмма изменений токов и напряжений в импульсном преобразователе напряжения понижающего типа в режиме непрерывных токов дросселя.
При поступлении импульса напряжения со схемы управления СУ происходит открытие транзистора VT (на диаграмме точка t1). Из-за не идеальности диода VD, он не может мгновенно закрыться, поэтому входное напряжение оказывается полностью приложено между выводами коллектор – эмиттер транзистора. Поэтому ток через транзистор возрастает до своего максимального значения IVTMAX. Скорость увеличения данного тока зависит от следующих параметров: скорость роста тока базы транзистора IБ, коэффициента усиления по току h21e и частотных свойств транзистора VT. Существенное влияние оказывают также частотные свойства диода VD, в частности, время рассасывания его неосновных носителей tРАС.VD.
В момент времени t2 начинается уменьшение обратного тока диода до значения IОБР, происходит восстановление обратного сопротивления диода, а ток, протекающий через транзистор ICVT, уменьшается до значения ILmin, а напряжение между выводами коллектор-эмиттер UCE – до напряжения насыщения
В течении длительности импульса напряжения от схемы управления (от точки t2 до точки t3), происходит возрастание тока, протекающего через дроссель от минимального значения
ILmin до максимального ILmax. При этом напряжение на диоде UVD составит
При этом напряжение на диоде UVD составит
После того как закончится импульс происходит закрытие транзистора через время рассасывания неосновных носителей в базе tРАС, при этом ток дросселя уменьшается из-за открытия диода VD. При этом ток через дроссель L уменьшается до значения ILmin. Напряжение на транзисторе составит
где UПР – падение напряжения на диоде в открытом состоянии.
Далее цикл работы преобразователя повторяется.
Работа понижающего преобразователя в режиме прерывистых токов дросселя
Работа понижающего преобразователя в режиме прерывистых токов дросселя немного отличается от вышеописанного режима непрерывных токов. Диаграмма работы показана ниже
Диаграмма изменений токов и напряжений в импульсном преобразователе напряжения понижающего типа в режиме прерывистых токов дросселя.
Во время действия импульса рост токов и напряжений в режиме прерывистых токов аналогичен режиму непрерывных токов. Однако после закрытия транзистора (промежуток t1 – t2), ток через дроссель IL падает до нуля.
Однако после закрытия транзистора (промежуток t1 – t2), ток через дроссель IL падает до нуля.
Далее на интервале конденсатор фильтра СВЫХ также разряжается через сопротивление нагрузки RH, а ток через дроссель L и диод VD отсутствует. В тоже время напряжение на транзисторе UCE уменьшается
где UПР – падение напряжения на диоде в прямом направлении.
При подаче управляющего импульса и открытии транзистора VT (момент времени t3), ток через него IVT начинает возрастать от нуля, но не происходит броска коллекторного тока до значения до максимального значения из-за закрытого диода VD. После чего цикл повторяется.
Режим прерывистых токов является нежелательным, так как на интервале t2 – t3 дроссель фактически выключен из работы и не участвует в фильтрации пульсирующего напряжения. Вследствие чего растёт внутренне сопротивление преобразователя и возрастает переменная составляющая выходного напряжения.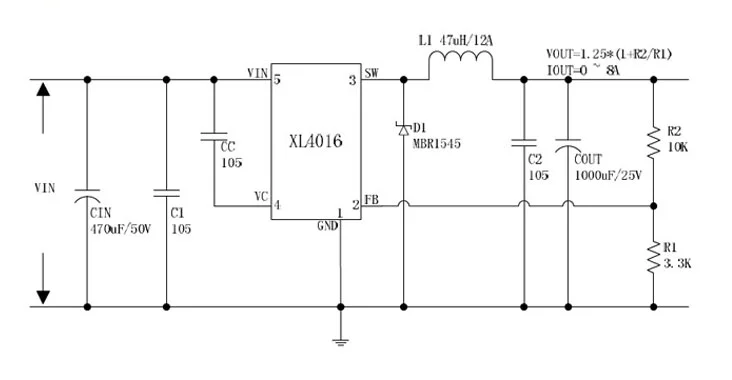
Методика расчёта импульсного понижающего преобразователя
В настоящее время системы управления для импульсных преобразователей представляет собой интегральную микросхему, внутри которой находятся все необходимые элементы: триггеры, генераторы, различные защитные элементы, транзисторные ключи. Поэтому в настоящее время расчёт преобразователя заключается в определении параметров схемы для расчёта элементов фильтра: дросселя L и выходного конденсатора СВЫХ, характеристик диода VD, а также потерь мощности в данных элементах. Так как в маломощных преобразователях (до нескольких десятков Вт) транзистор чаще всего интегрирован в микросхему системы управления СУ, то для расчёта КПД и потерь мощности дополнительно рассчитываются потери в микросхеме СУ.
В общем случае для расчёта параметров схемы понижающего преобразователя напряжения необходимо задаться следующими величинами: входное напряжение (напряжение питания) UВХ, пределы его изменения ΔUВХ; номинальное выходное напряжение UВЫХ и пределы его регулировки ΔUВЫХ; минимальный и максимальный ток нагрузки IHmin и IHmax; максимальная амплитуда пульсаций напряжения на нагрузке UН~; частоту преобразования fп.
Расчёт будет производиться в следующем порядке:
1. Частоту преобразования fп определяют в зависимости от микросхемы системы управления. Современные понижающие преобразователи способны работать на частотах сотни кГц, а иногда и единицы МГц, при этом их КПД составляет ηп = 0,85 … 0,95.
2. Определяем максимальное Dmax и минимальное Dmin значение коэффициента заполнения импульса на входе фильтра
3. Так как режим прерывистых токов дросселя нежелателен определим минимальную индуктивность дросселя Lmin
Ни данной величины индуктивности дросселя преобразователь переходит в режим прерывистых токов.
4. Для определения ёмкости конденсатора фильтра, определим произведение LCВЫХ по заданной величине пульсаций выходного напряжения
где UН~ — максимальная амплитуда пульсаций напряжения на нагрузке.
5. Для определения типа конденсатора определяем величину тока, протекающего через конденсатор CВЫХ. Так амплитуда тока ICmax
Так амплитуда тока ICmax
Величина действующего тока составит
6. Определяем величины токов: среднее ILср, минимальное ILmin и максимальное ILmax, протекающего через дроссель:
7. Рассчитываем параметры ключевого транзистора: предельные коллекторный ток ICmax и максимальное напряжение коллектор-эмиттер UCEmax. При использовании микросхем для понижающих преобразователей со встроенным ключевым транзистором данный пункт можно пропустить.
8. Определяем требуемые параметры импульсного диода VD: допустимый прямой ток IПР, и максимально допустимое обратное напряжение UОБР
9. Рассчитываем потери мощности на диоде PVD при работе в прямом направлении и в моменты переключения
10. Потери мощности на ключевом транзисторе PVT в режиме насыщения и в моменты переключения PCнас и PCдин
Для преобразователей с интегрированным ключевым транзистором в микросхему, вместо времени включения и выключения транзистора использовать время переключения tf, которое заданно в технической документации на микросхему.
11. Для окончания расчёта необходимо рассчитать параметры дросселя L фильтра, такие как размер и тип сердечника, количество витков провода и его сечение, потери мощности в нём.
Для полноты расчёта можно посчитать КПД преобразователя по выражению
где ΣРПОТ – суммарные потери мощности в преобразователе (в диоде, дросселе, схеме управлении, ключевом транзисторе), кроме вышеописанных потерь мощности сюда можно добавить потери от цепей управления микросхемы преобразователя, различные токи утечки и так далее, которые в сумме могут составлять до 10% от суммарных потерь мощности.
В следующей статье мы разработаем импульсный источник напряжения понижающего типа.
Теория это хорошо, но необходимо отрабатывать это всё практически ПОПРОБОВАТЬ МОЖНО ЗДЕСЬ
Разработка понижающего преобразователя без секретов
Несмотря на большую популярность понижающих преобразователей, найти практические рекомендации и методы расчета для их быстрой разработки может оказаться трудно.
Понижающие преобразователи (stepdown, buck) стали неотъемлемой частью современной электроники. Они преобразуют входное напряжение (обычно от 8 до 25 В) в меньшее стабилизируемое напряжение (обычно от 0,5 до 5 В). Понижающие преобразователи передают со входа на выход небольшие порции энергии, используя ключ, диод, индуктивность и несколько конденсаторов. Несмотря на то, что понижающие преобразователи по сравнению с линейными стабилизаторами, как правило, имеют бульшие размеры, а также больше шумят, они почти всегда обеспечивают лучший КПД.
Разработка понижающих преобразователей, несмотря на их широкое распространение, может вызвать проблемы как у начинающих, так и у достаточно опытных специалистов, поскольку практические правила и расчетные методики трудно найти. И хотя в справочных данных на микросхемы преобразователей можно встретить некоторые расчеты, даже эти расчеты часто перепечатываются с ошибками. В этой статье сделана попытка собрать воедино всю информацию, которая может потребоваться для разработки понижающего преобразователя.
Производители понижающих преобразователей часто приводят типовую схему включения, чтобы помочь инженерам быстро создать работающий прототип. В таких схемах указываются наименования компонентов и номиналы пассивных элементов. Иногда также приводится описание выбора компонентов. При этом предполагается, что разработчик применяет точно такую же схему, как та, что представлена в документации. Когда нужный компонент устаревает или ему требуется дешевая замена, возникают трудности с выбором его аналога.
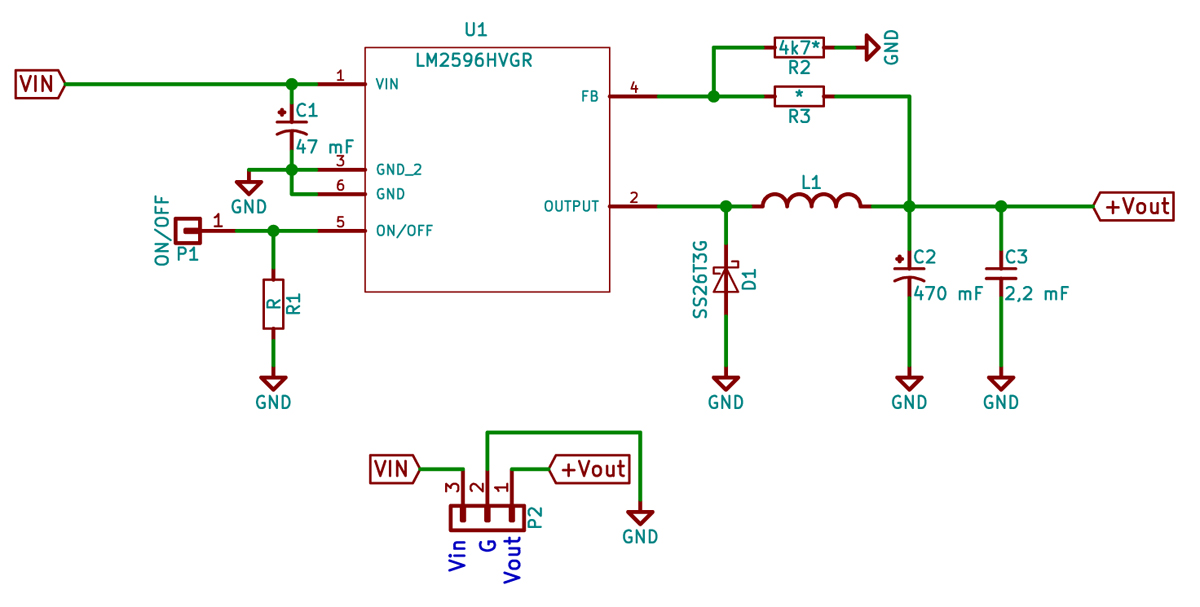
В этой статье описывается только одна топология понижающего преобразователя — с фиксированной частотой переключения и широтно-импульсной модуляцией (ШИМ, PWM), работающего в режиме непрерывных токов. Обсуждаемые принципы могут быть применены и для других топологий, но приводимые формулы для других топологий применять непосредственно нельзя. Чтобы объяснить тонкости разработки понижающего преобразователя, мы приведем пример, включающий детальный анализ для расчета номиналов различных компонентов. Для расчетов нам понадобятся четыре параметра: диапазон входных напряжений, стабилизированное выходное напряжение, максимальный выходной ток и частота переключений конвертера. На рис. 1 перечислены эти параметры вместе со схемой и основными компонентами, необходимыми для понижающего преобразователя.
Для расчетов нам понадобятся четыре параметра: диапазон входных напряжений, стабилизированное выходное напряжение, максимальный выходной ток и частота переключений конвертера. На рис. 1 перечислены эти параметры вместе со схемой и основными компонентами, необходимыми для понижающего преобразователя.
Рис. 1. Базовая схема понижающего преобразователя с рабочими параметрами
Выбор индуктивности
Расчет величины индуктивности — это наиболее важный момент в разработке понижающего импульсного преобразователя. Прежде всего, условимся, что преобразователь будет работать в режиме непрерывных токов, как чаще всего и делается. Это означает, что в индуктивности всегда запасена какая-то энергия, ток через нее течет непрерывно, в том числе в течение всего периода, когда силовой ключ заперт. Следующие выражения описывают работу идеального ключа (нулевое сопротивление в проводящем состоянии, бесконечное сопротивление в закрытом состоянии и нулевое время переключения) и идеального диода:
где fsw — частота переключений понижающего преобразователя и LIR — коэффициент пульсаций тока индуктивности, выраженный в долях выходного тока Iout (например, для тока пульсаций 300 мА от пика до пика при выходном токе 1 А LIR = 0,3 A/1 A = 0,3).
Значение LIR, равное 0,3, — это хороший компромисс между требованиями к КПД и к переходной характеристике по нагрузке. Увеличение LIR дает больший ток пульсаций и более быстрый переходный процесс при изменении нагрузки, а уменьшение LIR, таким образом, — уменьшение пульсаций тока в индуктивности и замедление переходного процесса при изменении нагрузки. На рис. 2 показаны переходные характеристики и ток через индуктивность при заданном токе нагрузки и значениях LIR от 0,2 до 0,5.
Рис. 2. При увеличении LIR от 0,2 время переходного процесса при изменении нагрузки уменьшается (на каждом рисунке: верхняя кривая — это переменная составляющая пульсирующего выходного напряжения, масштаб 100 мВ/деление; средняя кривая — ток нагрузки, 5 А/деление; нижняя кривая — ток через индуктивность, 5 А/деление. Временной масштаб для всех диаграмм 20 мкс/деление)
Пиковый ток через индуктивность определяет важнейший параметр катушки индуктивности, гарантирующий, что она будет работать без насыщения, — расчетный ток. А он, в свою очередь, определяет размеры катушки. Насыщение сердечника катушки уменьшает КПД преобразователя, вследствие чего увеличивается нагрев катушки, силового ключа и диода. Пиковый ток через индуктивность можно рассчитать следующим образом:
А он, в свою очередь, определяет размеры катушки. Насыщение сердечника катушки уменьшает КПД преобразователя, вследствие чего увеличивается нагрев катушки, силового ключа и диода. Пиковый ток через индуктивность можно рассчитать следующим образом:
Для параметров, показанных на рис. 1, эти формулы дают расчетную индуктивность 2,91 мкГн (LIR = 0,3). Выберем из доступного ряда ближайший номинал, например 2,8 мкГн, и убедимся, что его ток насыщения больше, чем рассчитанный нами пиковый ток (Ipeak = 8,09 A).
Ток насыщения надо выбирать с некоторым запасом (в данном случае 10 А), чтобы компенсировать разброс параметров компонентов и разницу между расчетными и реальными значениями. Запас в 20% сверх расчетного значения вполне приемлем, чтобы не слишком увеличивать габариты катушки.
Катушки индуктивности такого размера и с таким расчетным током обычно имеют максимальное активное сопротивление от 5 до 8 мОм. Чтобы минимизировать потери мощности, выберем катушку с наименьшим возможным активным сопротивлением. Несмотря на то, что разные производители приводят разные значения активного сопротивления, для расчетов следует использовать максимальное, а не типовое значение, потому что максимальное значение гарантируется для наихудшего случая.
Несмотря на то, что разные производители приводят разные значения активного сопротивления, для расчетов следует использовать максимальное, а не типовое значение, потому что максимальное значение гарантируется для наихудшего случая.
Выбор выходного конденсатора
Выходной конденсатор необходим для подавления выбросов и пульсаций, возникающих на выходе понижающего преобразователя. Недостаточная величина емкости этого конденсатора приводит к большим выбросам, а его слишком большое эквивалентное последовательное сопротивление (equivalent-series resistance, ESR) — к большим пульсациям напряжения. Наибольшие допустимые значения выбросов и пульсаций, как правило, определяются во время разработки. Таким образом, чтобы схема понижающего преобразователя удовлетворяла предъявляемым требованиям в части пульсаций, необходимо включить в нее выходной конденсатор с достаточной емкостью и низким ESR.
Когда нагрузка преобразователя внезапно резко уменьшается, на его выходе возникает выброс напряжения, значительно превышающий стабилизируемое значение. Для предотвращения выброса в нагрузку излишков запасенной в индуктивности энергии и превышения максимально допустимого значения выходного напряжения необходимо правильно определить емкость выходного конденсатора. Выброс напряжения на выходе может быть рассчитан по формуле (2).
Для предотвращения выброса в нагрузку излишков запасенной в индуктивности энергии и превышения максимально допустимого значения выходного напряжения необходимо правильно определить емкость выходного конденсатора. Выброс напряжения на выходе может быть рассчитан по формуле (2).
Из формулы (2) получаем:
где Co — емкость выходного конденсатора и ΔV — максимальный выброс напряжения на выходе.
Если задаться максимальным значением выброса на выходе, равным 100 мВ, то по формуле (3) получим расчетное значение емкости выходного конденсатора, равное 442 мкФ. Если к этому добавить типичный разброс емкости конденсаторов 20%, то получим практическую емкость выходного конденсатора около 530 мкФ. Ближайший стандартный номинал — 560 мкФ. Выходные пульсации на этом конденсаторе можно рассчитать по формуле:
ESR выходного конденсатора является основным фактором, влияющим на размах пульсаций. Их величина может быть рассчитана следующим образом:
Следует иметь в виду, что конденсатор со слишком низким ESR может вызвать неустойчивость преобразователя. Влияние этого фактора на устойчивость изменяется от микросхемы к микросхеме, поэтому при выборе конденсатора необходимо внимательно прочитать справочные данные и обратить особое внимание на раздел, посвященный устойчивости преобразователя.
Влияние этого фактора на устойчивость изменяется от микросхемы к микросхеме, поэтому при выборе конденсатора необходимо внимательно прочитать справочные данные и обратить особое внимание на раздел, посвященный устойчивости преобразователя.
Сложение выходных пульсаций, определяемых емкостью выходного конденсатора (первое слагаемое в формуле (4)), и пульсаций, определяемых ESR (второе слагаемое в формуле (4)), дает суммарное значение пульсаций на выходе понижающего преобразователя:
Преобразуем выражение (4) для получения ESR (5).
Качественный понижающий преобразователь обычно дает величину выходных пульсаций менее 2% (40 мВ в нашем случае). Согласно формуле (5), для выходного конденсатора емкостью 560 мкФ значение ESR не должно превышать 18,8 мОм. Следовательно, надо выбирать конденсатор с ESR, меньшим 18,8 мОм, и емкостью, большей или равной 560 мкФ. Чтобы получить величину ESR, меньшую 18,8 мОм, можно соединить параллельно несколько конденсаторов с низким ESR.
На рис. 3 показана зависимость пульсаций выходного напряжения от емкости и ESR выходного конденсатора. Так как в нашем примере используются танталовые конденсаторы, ESR конденсатора доминирует при определении выходных пульсаций.
Выбор входного конденсатора
Рис. 3. Вклад эквивалентного последовательного сопротивления (ESR) доминирует при образовании пульсаций выходного напряжения
Величина пульсаций тока, протекающего через входной конденсатор, определяет его емкость и геометрические размеры. Следующее выражение позволяет рассчитать, какой пульсирующий ток должен выдерживать входной конденсатор:
На рис. 4 изображен пульсирующий ток через конденсатор (показан относительно выходного тока) в зависимости от входного напряжения понижающего преобразователя (показано как отношение выходного напряжения к входному). Наихудшая ситуация образуется тогда, когда Vin = 2Vout (Vout/Vin = 0,5), при этом пульсации входного тока равны половине выходного тока.
Рис. 4. Пульсации тока через входной конденсатор достигают в наихудшем случае половины выходного тока, если изменяющееся входное напряжение становится равным удвоенному стабилизируемому выходному напряжению
Входная емкость, требуемая для понижающего преобразователя, зависит от импеданса входного источника питания. Для обычных лабораторных источников питания достаточно от 10 до 22 мкФ на ампер. Взяв параметры проекта, приведенные на рис. 1, можно получить пульсации входного тока 3,16 А. Таким образом, можно начать с общей входной емкости 40 мкФ и затем уточнить это значение по результатам экспериментов.
Танталовые конденсаторы — не очень удачный выбор для входных конденсаторов. Обычно при выходе из строя они замыкаются накоротко, создавая тем самым КЗ на входе стабилизатора, что может привести к возгоранию устройства. Керамические или алюминиевые электролитические конденсаторы более предпочтительны, так как они не дают такого эффекта.
Керамические конденсаторы удобны в тех случаях, когда площадь печатной платы или высота компонентов ограничены, но из-за керамики схема может издавать отчетливо слышимое гудение. Этот высокий звук вызывается механической вибрацией керамического конденсатора, возникающей из-за ферроэлектрических свойств конденсатора и пьезоэлектрических явлений, происходящих вследствие пульсаций напряжения на конденсаторе. Полимерные конденсаторы могут смягчить эту проблему. Полимерные конденсаторы также могут замыкаться накоротко, но они гораздо более надежны, чем танталовые, и поэтому лучше подходят на роль входных конденсаторов.
Этот высокий звук вызывается механической вибрацией керамического конденсатора, возникающей из-за ферроэлектрических свойств конденсатора и пьезоэлектрических явлений, происходящих вследствие пульсаций напряжения на конденсаторе. Полимерные конденсаторы могут смягчить эту проблему. Полимерные конденсаторы также могут замыкаться накоротко, но они гораздо более надежны, чем танталовые, и поэтому лучше подходят на роль входных конденсаторов.
Выбор диода
Ограничивающим фактором при выборе диода является рассеиваемая мощность. Средняя мощность для наихудшего случая может быть рассчитана по следующей формуле:
где VD — это падение напряжения на диоде при заданном выходном токе Ioutmax. (обычно составляет 0,7 В для кремниевого диода и 0,3 В для диода Шоттки.) Убедитесь, что выбранный диод способен рассеивать такую мощность. Для обеспечения надежной работы во всем диапазоне входных напряжений надо также быть уверенным, что повторяющееся максимальное обратное напряжение для этого диода больше, чем максимальное входное напряжение (VRRM/VINmax). Максимальный допустимый прямой ток диода должен быть больше или равен максимальному выходному току.
Максимальный допустимый прямой ток диода должен быть больше или равен максимальному выходному току.
Выбор силового ключа
Выбора силового ключа (полевого транзистора с изолированным затвором, MOSFET) можно избежать: инженеры часто обходят эту задачу, выбирая микросхемы стабилизаторов со встроенным ключом. К сожалению, для большинства производителей большой полевой транзистор, встроенный в один корпус с контроллером преобразователя, обходится слишком дорого. Поэтому преобразователи со встроенным силовым ключом обычно рассчитаны на максимальные токи от 3 до 6 А. Для бульших выходных токов приходится использовать внешний ключ.
Прежде чем приступить к выбору подходящего изделия, необходимо определить максимальную температуру перехода (TJmax) и максимальную окружающую температуру (TAmax) для внешнего ключа. TJmax не должна быть больше 115–120 °C, а TAmax не должна превышать 60 °C. Максимальная окружающая температура в 60 °C может показаться высокой, но схемы понижающих преобразователей обычно размещаются в таких корпусах, для которых подобная окружающая температура является вполне нормальной. Максимально допустимый перепад температур для силового ключа можно вычислить следующим образом:
Максимально допустимый перепад температур для силового ключа можно вычислить следующим образом:
Подстановка приведенных выше величин в формулу (7) дает максимальный перепад температур для силового ключа в 55 °C. Максимальная мощность, рассеиваемая силовым ключом, может быть вычислена из допустимого максимального перепада температур для ключа:
Тип корпуса силового ключа и количество меди на печатной плате, соединенной с ним, влияют на тепловое сопротивление между переходом ключа и окружающей средой (θJA). Когда тепловое сопротивление не указано в справочных данных, для стандартного корпуса SO-8 хорошим приближением можно считать значение 62 °C/Вт (соединение через проводники, без открытой металлической поверхности в днище корпуса). Это справедливо, если площадь печатных проводников составляет 1 дюйм² при медном покрытии с удельной массой 1 унция на 1 квадратный фут (1 oz copper).
Между величиной теплового сопротивления и количеством меди, соединенным с устройством, нет прямой пропорциональной зависимости. Уменьшение теплового сопротивления быстро снижается при увеличении площади меди выше 1 дюйм². Подстановка в выражение (8) значения θJA = 62 °C/Вт дает максимально допустимую рассеиваемую мощность ключа около 0,89 Вт.
Уменьшение теплового сопротивления быстро снижается при увеличении площади меди выше 1 дюйм². Подстановка в выражение (8) значения θJA = 62 °C/Вт дает максимально допустимую рассеиваемую мощность ключа около 0,89 Вт.
Рассеиваемая ключом мощность зависит от его сопротивления в проводящем состоянии и потерь на переключение. Потери на сопротивлении открытого ключа могут быть вычислены по формуле:
Так как в справочных данных обычно приводится максимальное сопротивление открытого ключа только при температуре 25 °C, требуется оценить его величину для нагретого устройства. Согласно практическому правилу, температурный коэффициент 0,5%/°C обеспечивает хорошее приближение для расчета максимального сопротивления открытого ключа при любой температуре. Таким образом, сопротивление открытого ключа в нагретом состоянии рассчитывается как:
Предположив, что потери на сопротивлении ключа составляют примерно 60% от всех потерь в ключе, мы можем сделать подстановку в формулу (10) и получить выражение (11) для максимально допустимого сопротивления открытого ключа при температуре 25 °C:
Потери на переключения составляют меньшую часть в мощности, рассеиваемой силовым ключом, но они должны быть учтены в расчетах. Следующий расчет потерь на переключения дает только грубую оценку, и поэтому он не заменяет лабораторных экспериментов. Желательно при проведении испытаний установить на корпусе силового ключа термопару для контроля правильности выкладок.
Следующий расчет потерь на переключения дает только грубую оценку, и поэтому он не заменяет лабораторных экспериментов. Желательно при проведении испытаний установить на корпусе силового ключа термопару для контроля правильности выкладок.
где CRSS — это проходная емкость ключа, IGATE — пиковый втекающий-вытекающий ток управления затвором, отдаваемый контроллером, а силовой ключ — MOSFET верхнего плеча.
Предположим, что затвор управляется током 1 А (значение взято из справочных данных на драйвер-контроллер) и проходная емкость равно 300 пФ (согласно справочным данным на силовой ключ). Тогда из выражения (11) можно получить максимальное RDS(ON)25 °C приблизительно 26,2 мОм. Перерасчет и суммирование потерь на сопротивлении открытого ключа с потерями на переключение дают рассеиваемую мощность 0,676 Вт. Далее можно получить максимальный перепад температур на силовом ключе 101 C, что укладывается в допустимый температурный диапазон.
КПД понижающего преобразователя
Минимизация потерь мощности в преобразователе увеличивает срок службы батарей и уменьшает рассеивание тепла. Следующие выражения позволяют рассчитать потери мощности в каждой части преобразователя.
Потери на эквивалентном последовательном сопротивлении (ESR) входного конденсатора:
Формулы (6), (9) и (12) позволяют рассчитать потери на диоде, на сопротивлении открытого ключа и на переключении ключа.
Потери на активном сопротивлении катушки индуктивности:
Потери на ESR выходного конденсатора:
Потери в меди печатной платы: эти потери трудно подсчитать точно, но рис. 5 дает возможность грубо оценить величину сопротивления квадратной медной площадки на поверхности печатной платы. Используя рис. 5, можно рассчитать рассеиваемую мощность при помощи простой формулы I²R.
Рис. 5. Сопротивление квадратного участка меди 1 oz приблизительно равно 0,5 мОм
В следующей формуле суммируются все потери мощности в преобразователе, и эти потери используются для расчета КПД преобразователя:
Если принять потери в меди равными приблизительно 0,75 Вт, то КПД такого преобразователя будет равен 69,5%. Замена обычного кремниевого диода на диод Шоттки увеличит КПД до 79,6%, а если заменить диод на синхронный выпрямитель на MOSFET, то КПД увеличится до 85% при полной нагрузке.
Замена обычного кремниевого диода на диод Шоттки увеличит КПД до 79,6%, а если заменить диод на синхронный выпрямитель на MOSFET, то КПД увеличится до 85% при полной нагрузке.
Рис. 6 иллюстрирует распределение потерь мощности в преобразователе. Удвоение количества меди до 2 oz или утроение до 3 oz минимизирует потери в меди и поэтому увеличивает КПД до 86–87%.
Рис. 6. Потери на диоде следует минимизировать для увеличения КПД преобразователя
Тщательная разводка платы имеет очень большое значение для получения малых потерь на переключение и устойчивой работы преобразователя. Для начала используйте следующие правила:
- Делайте пути прохождения больших токов как можно более короткими, особенно цепи подключения земли.
- Минимизируйте длины соединений между катушкой индуктивности, силовым ключом и диодом (синхронным выпрямителем).
- Делайте трассы подключения питания и нагрузки короткими и широкими. Это особенно важно для получения высокого КПД.
- Располагайте узлы измерения напряжения и тока вдали от переключающихся узлов.

Проверка работы
При разработке или модификации схемы понижающего импульсного преобразователя (работающей в режиме непрерывных токов и использующей ШИМ) можно использовать формулы из этой статьи для расчета номиналов основных компонентов и требуемых характеристик. При этом необходимо провести лабораторные испытания схемы, чтобы проверить электрические и температурные характеристики. Для получения работающей схемы надлежащая разводка печатной платы и разумное размещение компонентов так же необходимы, как и правильный выбор компонентов.
Понижающий преобразователь постоянного тока в постоянный. Учебное пособие и схема
Скачать PDF
Abstract
Импульсные источники питания обладают более высокой эффективностью, чем традиционные линейные источники питания. Они могут повышать, понижать и инвертировать.
Введение
Выключатель питания был ключом к практичным импульсным регуляторам. До изобретения вертикального выключателя питания на основе оксида металла и полупроводника (VMOS) переключающие источники питания, как правило, были непрактичными.
Основной функцией индуктора является ограничение скорости нарастания тока через выключатель питания. Это действие ограничивает пиковый ток, который в противном случае был бы ограничен только сопротивлением переключателя. Ключевым преимуществом использования катушки индуктивности в импульсных стабилизаторах является то, что катушка индуктивности накапливает энергию. Эта энергия может быть выражена в джоулях как функция тока:
- E = ½ × L × I²
Линейный регулятор использует резистивное падение напряжения для регулирования напряжения, теряя мощность (падение напряжения, умноженное на силу тока) в виде тепла. Катушка индуктивности импульсного стабилизатора имеет падение напряжения и соответствующий ток, но ток на 90 градусов не совпадает по фазе с напряжением. Из-за этого энергия сохраняется и может быть восстановлена в фазе разряда цикла переключения. Это приводит к гораздо более высокой эффективности и гораздо меньшему нагреву.
Катушка индуктивности импульсного стабилизатора имеет падение напряжения и соответствующий ток, но ток на 90 градусов не совпадает по фазе с напряжением. Из-за этого энергия сохраняется и может быть восстановлена в фазе разряда цикла переключения. Это приводит к гораздо более высокой эффективности и гораздо меньшему нагреву.
Что такое импульсный регулятор?
Импульсный регулятор – это схема, в которой используется переключатель питания, катушка индуктивности и диод для передачи энергии от входа к выходу.
Основные компоненты схемы переключения могут быть переставлены таким образом, чтобы образовать понижающий (понижающий) преобразователь, повышающий (повышающий) преобразователь или инвертор (обратноходовой). Эти конструкции показаны на рисунках 1, 2, 3 и 4 соответственно, где рисунки 3 и 4 такие же, за исключением полярности трансформатора и диода. Схемы обратной связи и управления могут быть аккуратно размещены вокруг этих цепей, чтобы регулировать передачу энергии и поддерживать постоянный выходной сигнал в нормальных рабочих условиях.
Рис. 1. Топология понижающего преобразователя.
Рис. 2. Простой повышающий преобразователь.
Рис. 3. Инвертирующая топология.
Рис. 4. Топология обратноходового трансформатора.
Зачем использовать импульсный регулятор?
Импульсные стабилизаторы обладают тремя основными преимуществами по сравнению с линейными регуляторами. Во-первых, эффективность переключения может быть намного выше. Во-вторых, поскольку при передаче теряется меньше энергии, требуются меньшие компоненты и меньшее управление температурой. В-третьих, энергия, накопленная катушкой индуктивности в импульсном регуляторе, может быть преобразована в выходные напряжения, которые могут быть больше, чем входное (повышение), отрицательное (инвертор), или даже может быть передана через трансформатор для обеспечения гальванической развязки по отношению к вход (рис. 4).
Учитывая преимущества импульсных стабилизаторов, может возникнуть вопрос, где можно использовать линейные регуляторы? Линейные регуляторы обеспечивают более низкий уровень шума и большую полосу пропускания; их простота иногда может предложить менее дорогое решение.
Следует признать, что у импульсных регуляторов есть недостатки. Они могут быть шумными и требуют управления энергопотреблением в виде контура управления. К счастью, решение этих проблем управления интегрировано в современные микросхемы контроллера с переключением режимов.
Фаза заряда
Базовая конфигурация форсирования показана на рис. 5. Если предположить, что ключ был разомкнут в течение длительного времени и что падение напряжения на диоде отрицательное, напряжение на конденсаторе равно входному напряжению. Когда переключатель замыкается, входное напряжение +V IN подается на катушку индуктивности, а диод предотвращает разрядку конденсатора +V OUT на землю. Поскольку входное напряжение является постоянным, ток через катушку индуктивности линейно возрастает со временем со скоростью, пропорциональной входному напряжению, деленному на индуктивность.
Рис. 5. Фаза зарядки: когда переключатель замыкается, ток через катушку индуктивности возрастает.
Фаза разряда
На рис. 6 показана фаза разряда. Когда ключ снова размыкается, ток катушки индуктивности продолжает течь в выпрямительный диод, заряжая выход. По мере увеличения выходного напряжения наклон тока di/dt, несмотря на индуктор, меняется на противоположный. Выходное напряжение увеличивается до тех пор, пока не будет достигнуто равновесие или:
- В L = L × di/dt
Другими словами, чем выше напряжение дросселя, тем быстрее падает ток дросселя.
Рисунок 6. Фаза разряда: когда ключ размыкается, ток течет к нагрузке через выпрямительный диод.
В установившемся режиме работы среднее напряжение на катушке индуктивности за весь цикл переключения равно нулю. Это означает, что средний ток через индуктор также находится в установившемся режиме.
- В IN × t ВКЛ = t ВЫКЛ × В L
И потому что:
- В ВЫХ = В ВХОД + В Л
Затем мы можем установить связь:
- В ВЫХ = В ВХОД × (1 + t ВКЛ /t ВЫКЛ )
Использование соотношения для рабочего цикла (D):
- t ВКЛ /(t ВКЛ + t ВЫКЛ ) = D
Затем для контура наддува:
- В ВЫХ = В ВХОД /(1-D)
Аналогичные выводы можно сделать для понижающей цепи:
- В ВЫХ = В ВХОД × D
А для схемы инвертора (обратноходовой):
- В ВЫХ = В ВХОД × D/(1-D)
Методы управления
Из расчетов для повышающего, понижающего и инверторного преобразователя (обратноходового) видно, что изменение рабочего цикла управляет установившимся выходным сигналом по отношению к входному напряжению. Это ключевая концепция, регулирующая все схемы переключения на основе индуктора.
Это ключевая концепция, регулирующая все схемы переключения на основе индуктора.
ШИМ в режиме напряжения
Наиболее распространенным методом управления, показанным на рисунке 7, является широтно-импульсная модуляция (ШИМ). Этот метод берет выборку выходного напряжения и вычитает ее из опорного напряжения, чтобы установить небольшой сигнал ошибки (V ОШИБКА ). Этот сигнал ошибки сравнивается с линейным сигналом осциллятора. Компаратор выдает цифровой выход (ШИМ), который управляет выключателем питания. Когда выходное напряжение схемы изменяется, V ERROR также изменяется и, таким образом, вызывает изменение порога компаратора. Следовательно, ширина выходного импульса (ШИМ) также изменяется. Это изменение рабочего цикла затем перемещает выходное напряжение, чтобы уменьшить сигнал ошибки до нуля, тем самым завершая контур управления.
Рис. 7. Изменяющийся сигнал ошибки генерирует сигнал переключения с широтно-импульсной модуляцией.
На рис. 8 показана практическая схема, использующая топологию форсирования, сформированную с помощью MAX1932. Эта ИС представляет собой интегрированный контроллер со встроенным программируемым цифро-аналоговым преобразователем (ЦАП). ЦАП устанавливает выходное напряжение в цифровом виде через последовательный канал. R5 и R8 образуют делитель, измеряющий выходное напряжение. Резистор R6 фактически разомкнут, когда напряжение ЦАП равно опорному напряжению (1,25 В). Это связано с тем, что на резисторе R6 нулевое напряжение и, следовательно, нулевой ток. Когда выход ЦАП равен нулю (земля), R6 фактически параллелен R8. Эти два условия соответствуют минимальному и максимальному диапазону регулировки выходного напряжения 40 В и 90В соответственно.
Рис. 8. MAX1932 представляет собой интегральную повышающую схему с управлением по напряжению.
Затем сигнал делителя вычитается из внутреннего опорного напряжения 1,25 В, а затем усиливается. Затем этот сигнал ошибки выводится на контакт 8 в качестве источника тока. Вместе с дифференциальной входной парой это образует крутизну усилителя. Такое расположение используется потому, что выходной сигнал усилителя ошибки имеет высокий импеданс (источник тока), что позволяет регулировать усиление схемы путем изменения резисторов R7 и C4. Эта компоновка также обеспечивает возможность подстройки коэффициента усиления контура для обеспечения приемлемого запаса устойчивости. Затем сигнал ошибки на выводе 8 направляется на компаратор и выводится для управления переключателем питания. R1 представляет собой токоизмерительный резистор, измеряющий выходной ток. Когда ток становится недопустимо высоким, схема ШИМ отключается, тем самым защищая схему.
Вместе с дифференциальной входной парой это образует крутизну усилителя. Такое расположение используется потому, что выходной сигнал усилителя ошибки имеет высокий импеданс (источник тока), что позволяет регулировать усиление схемы путем изменения резисторов R7 и C4. Эта компоновка также обеспечивает возможность подстройки коэффициента усиления контура для обеспечения приемлемого запаса устойчивости. Затем сигнал ошибки на выводе 8 направляется на компаратор и выводится для управления переключателем питания. R1 представляет собой токоизмерительный резистор, измеряющий выходной ток. Когда ток становится недопустимо высоким, схема ШИМ отключается, тем самым защищая схему.
Тип переключения (топология) на рисунках 7 и 8 классифицируется как контроллер режима напряжения (VMC), поскольку обратная связь регулирует выходное напряжение. Для анализа можно предположить, что если коэффициент усиления контура бесконечен, выходное сопротивление идеального источника напряжения равно нулю.
Токовый ШИМ
Другим часто используемым типом управления является управление по току (CMC). Этот метод регулирует выходной ток, и при бесконечном коэффициенте усиления контура выход представляет собой источник с высоким импедансом. В CMC токовая петля вложена в более медленную петлю напряжения, как показано на рисунке 9.; линейное изменение генерируется наклоном тока индуктора и сравнивается с сигналом ошибки. Таким образом, при просадке выходного напряжения ККМ подает больший ток в нагрузку. Преимуществом CMC является его способность управлять током индуктора. В VMC ток индуктора не измеряется. Это становится проблемой, потому что индуктор вместе с конденсатором выходного фильтра образует резонансный резервуар, который может звенеть и даже вызывать колебания. Управление режимом тока определяет ток индуктора для устранения несоответствий. Хотя это и трудно осуществить, тщательно подобранные компоненты компенсации могут эффективно компенсировать этот резонанс в VCM.
Этот метод регулирует выходной ток, и при бесконечном коэффициенте усиления контура выход представляет собой источник с высоким импедансом. В CMC токовая петля вложена в более медленную петлю напряжения, как показано на рисунке 9.; линейное изменение генерируется наклоном тока индуктора и сравнивается с сигналом ошибки. Таким образом, при просадке выходного напряжения ККМ подает больший ток в нагрузку. Преимуществом CMC является его способность управлять током индуктора. В VMC ток индуктора не измеряется. Это становится проблемой, потому что индуктор вместе с конденсатором выходного фильтра образует резонансный резервуар, который может звенеть и даже вызывать колебания. Управление режимом тока определяет ток индуктора для устранения несоответствий. Хотя это и трудно осуществить, тщательно подобранные компоненты компенсации могут эффективно компенсировать этот резонанс в VCM.
Рис. 9. Токовый режим широтно-импульсной модуляции.
Регуляторы наддува в точке нагрузки (POL)
Схема на рисунке 10 использует CMC с контроллером MAX668. Эта повышающая схема аналогична схемам на рисунках 7 и 8, за исключением того, что резистор R1 определяет ток дросселя для CMC. R1 и некоторые внутренние компараторы обеспечивают ограничение тока. R5 в сочетании с C9 фильтрует помехи переключения на чувствительном резисторе, чтобы предотвратить ложное срабатывание ограничения тока. Внутренний порог ограничения тока MAX668 фиксирован; изменение резистора R1 регулирует настройку ограничения тока. Резистор R2 задает рабочую частоту. MAX668 — это универсальная интегральная схема, которая может обеспечивать широкий диапазон преобразований постоянного тока в постоянный.
Эта повышающая схема аналогична схемам на рисунках 7 и 8, за исключением того, что резистор R1 определяет ток дросселя для CMC. R1 и некоторые внутренние компараторы обеспечивают ограничение тока. R5 в сочетании с C9 фильтрует помехи переключения на чувствительном резисторе, чтобы предотвратить ложное срабатывание ограничения тока. Внутренний порог ограничения тока MAX668 фиксирован; изменение резистора R1 регулирует настройку ограничения тока. Резистор R2 задает рабочую частоту. MAX668 — это универсальная интегральная схема, которая может обеспечивать широкий диапазон преобразований постоянного тока в постоянный.
Внешние компоненты MAX668 могут быть рассчитаны на высокое напряжение, что обеспечивает большую гибкость для приложений с высокой мощностью.
Рис. 10. MAX668 для повышающей схемы с управлением по току.
Для портативных устройств с низким входным напряжением, требующих меньшего энергопотребления, рекомендуются MAX1760 и MAX8627 (выходной ток 1 А).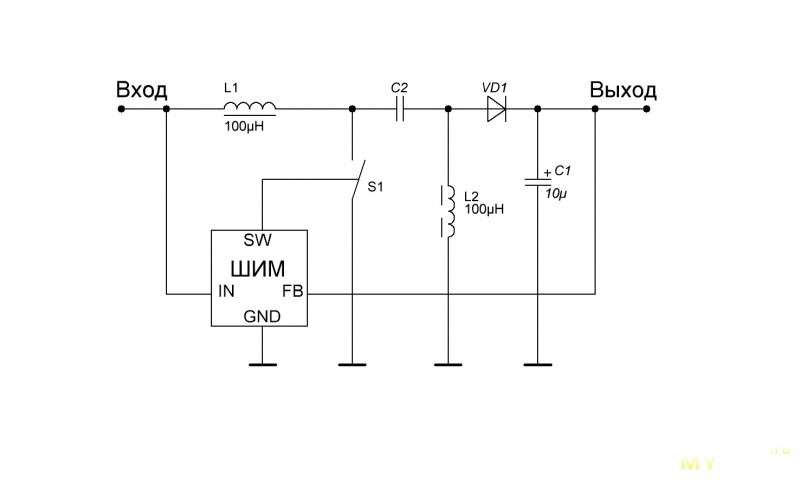 Эти последние устройства используют внутренние полевые транзисторы и измеряют ток, используя сопротивление полевых транзисторов для измерения тока индуктора (резистор датчика не требуется).
Эти последние устройства используют внутренние полевые транзисторы и измеряют ток, используя сопротивление полевых транзисторов для измерения тока индуктора (резистор датчика не требуется).
Повышающий преобразователь nanoPower
Повышающие преобразователи широко используются в бытовой электронике для повышения и стабилизации проседающего напряжения литий-ионных аккумуляторов под нагрузкой. Новым и растущим потребительским рынком является Интернет вещей (IoT), «облачная» сеть беспроводных взаимосвязанных устройств, которые часто включают в себя аудио, видео, умный дом и носимые приложения. Тенденция IoT в сочетании с «зеленой» энергией (стремление сократить потери энергии и перейти к возобновляемым формам производства энергии) требует, чтобы небольшие устройства работали автономно в течение длительных периодов времени, потребляя при этом мало энергии. Синхронный повышающий преобразователь MAX17222 nanoPower отвечает всем требованиям. MAX17222 предлагает диапазон входного напряжения от 400 мВ до 5,5 В, пиковое ограничение тока дросселя 0,5 А и выходное напряжение, которое выбирается с помощью одного стандартного резистора 1%. Роман True Shutdown 9Режим 0220 ™ дает токи утечки в диапазоне наноампер, что делает это устройство поистине nanoPower!
Роман True Shutdown 9Режим 0220 ™ дает токи утечки в диапазоне наноампер, что делает это устройство поистине nanoPower!
На рис. 11 показаны основные элементы MAX17222 в отношении токов отключения и покоя.
Рис. 11. Ток отключения и покоя MAX17222.
Функция True Shutdown отключает выход от входа без прямого или обратного тока, что приводит к очень низкому току утечки. Входной ток покоя (I QINT ) для MAX17222 составляет 0,5 нА (разрешение открытия после запуска), а выходной ток покоя (I QOUT ) составляет 300 нА.
Понижающие регуляторы
На рис. 12 показана упрощенная версия архитектуры Maxim Quick-PWM™. Чтобы проанализировать эту понижающую схему, мы начнем с сигнала обратной связи ниже порога регулирования, определяемого эталоном. Если КЗ по прямому току отсутствуют, то сразу же включается однократный таймер t ON , рассчитывающий время включения для ДТ. это т Расчет ON основан на делении выходного напряжения на входное, что приблизительно соответствует времени включения, необходимому для поддержания фиксированной частоты переключения, определяемой константой K. По истечении времени однократного таймера t ON включается DH. выключено, а DL включено. Затем, если напряжение все еще ниже порога регулирования, ЦТ немедленно включается снова. Это позволяет току катушки индуктивности быстро увеличиваться в соответствии с требованиями нагрузки. После достижения равновесия с нагрузкой среднее напряжение на катушке индуктивности должно быть равно нулю. Поэтому мы вычисляем:
По истечении времени однократного таймера t ON включается DH. выключено, а DL включено. Затем, если напряжение все еще ниже порога регулирования, ЦТ немедленно включается снова. Это позволяет току катушки индуктивности быстро увеличиваться в соответствии с требованиями нагрузки. После достижения равновесия с нагрузкой среднее напряжение на катушке индуктивности должно быть равно нулю. Поэтому мы вычисляем:
Рисунок 12. Упрощенная блок-схема управления Quick-PWM от Maxim.
- t ВКЛ × (V ВХОД — V ВЫХ ) = t ВЫКЛ × V ВЫХ
Перестановка:
- V OUT /(V IN — V OUT ) = t ON /t OFF
Добавление 1 к обеим сторонам и сбор условий:
- В ВЫХ /В ВХОД = t ВКЛ /(t ВКЛ + t ВЫКЛ )
Поскольку коэффициент заполнения равен D:
- t ВКЛ /(t ВКЛ + t ВЫКЛ ) = D
Для понижающей цепи:
- D = В ВЫХ /В ВХОД
Запатентованный компанией Maxim метод управления Quick-PWM предлагает некоторые преимущества по сравнению с PWM. Управление Quick-PWM генерирует новый цикл, когда выходное напряжение падает ниже порога регулирования. Следовательно, тяжелые переходные процессы заставляют выходной сигнал падать, немедленно запуская новый цикл. Это действие приводит к отклику на скачок нагрузки 100 нс. Также важно отметить, что в отличие от понижающей схемы на рис. 1, на рис. 12 вместо диода в разрядном пути используется полевой МОП-транзистор (Q2). Такая конструкция снижает потери, связанные с падением напряжения на диоде; сопротивление канала MOSFET во включенном состоянии удваивается как измерение тока. Поскольку для стимуляции переключения схемы требуются пульсации выходного напряжения, для поддержания стабильности требуется конденсатор выходного фильтра с некоторым ESR. Архитектура Quick-PWM также может быстро реагировать на изменения линейного входа, напрямую передавая сигнал входного напряжения на вычислитель времени включения. Другие методы должны ждать, пока выходное напряжение просядет или поднимется, прежде чем предпринимать какие-либо действия, а это часто бывает слишком поздно.
Управление Quick-PWM генерирует новый цикл, когда выходное напряжение падает ниже порога регулирования. Следовательно, тяжелые переходные процессы заставляют выходной сигнал падать, немедленно запуская новый цикл. Это действие приводит к отклику на скачок нагрузки 100 нс. Также важно отметить, что в отличие от понижающей схемы на рис. 1, на рис. 12 вместо диода в разрядном пути используется полевой МОП-транзистор (Q2). Такая конструкция снижает потери, связанные с падением напряжения на диоде; сопротивление канала MOSFET во включенном состоянии удваивается как измерение тока. Поскольку для стимуляции переключения схемы требуются пульсации выходного напряжения, для поддержания стабильности требуется конденсатор выходного фильтра с некоторым ESR. Архитектура Quick-PWM также может быстро реагировать на изменения линейного входа, напрямую передавая сигнал входного напряжения на вычислитель времени включения. Другие методы должны ждать, пока выходное напряжение просядет или поднимется, прежде чем предпринимать какие-либо действия, а это часто бывает слишком поздно.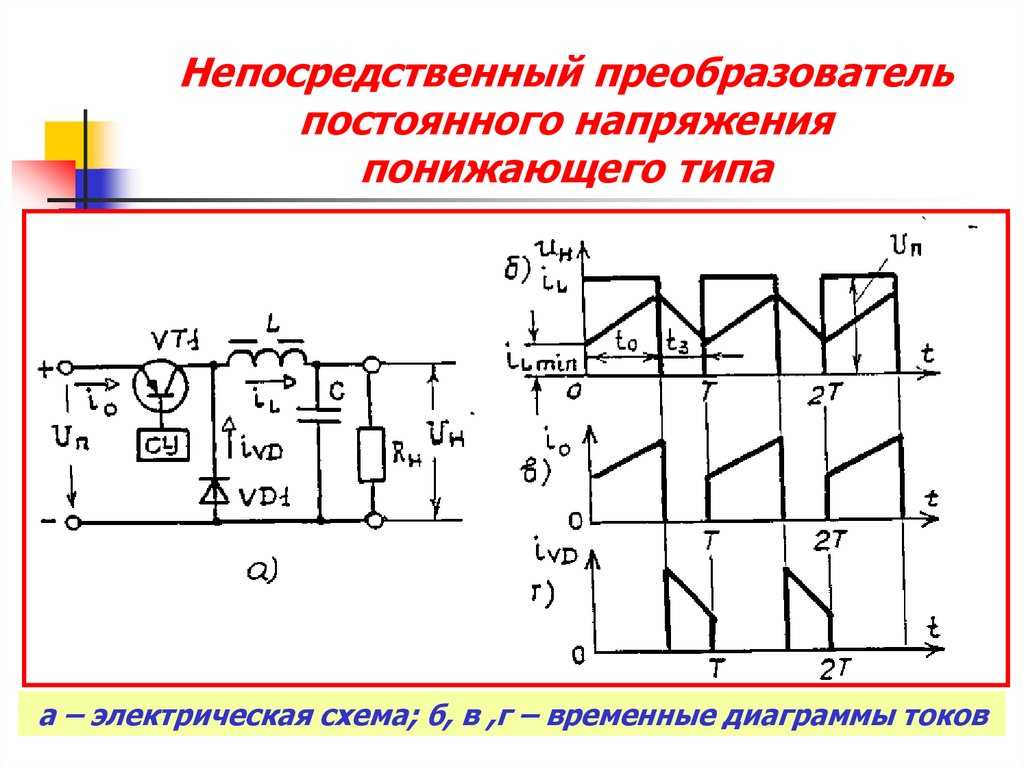
Понижающий контроллер питания памяти DDR
Практическое применение Quick-PWM показано на рис. 13. MAX8632 — это встроенный блок питания памяти DDR. Наряду с понижающей схемой Quick-PWM (VDDQ) MAX8632 интегрирует высокоскоростной линейный регулятор (VTT) для управления переходными процессами шины, характерными для систем памяти DDR. Линейный регулятор имеет определенные преимущества перед переключателями: линейные стабилизаторы не имеют дросселя для ограничения скорости нарастания тока, поэтому очень высокая скорость нарастания тока может обслуживать переходные процессы нагрузки. Более медленные схемы потребуют больших конденсаторов для обеспечения тока нагрузки, пока источник питания не сможет увеличивать ток для обслуживания нагрузки.
Более детальное изображение (PDF, 76kB)
Рис. 13. MAX8632 использует архитектуру Maxim Quick-PWM и линейный стабилизатор для обеспечения полной системы питания DDR. Устройство может использоваться в качестве основного графического процессора или стандартного источника питания основной логики.
Эффективность
Одним из самых больших факторов потерь мощности для коммутаторов является выпрямительный диод. Рассеиваемая мощность — это просто прямое падение напряжения, умноженное на проходящий через него ток. Обратное восстановление кремниевых диодов также может привести к потерям. Эти потери мощности снижают общую эффективность и требуют управления температурным режимом в виде радиатора или вентилятора.
Чтобы свести к минимуму эти потери, импульсные стабилизаторы могут использовать диоды Шоттки, которые имеют относительно низкое падение напряжения в прямом направлении и хорошее обратное восстановление. Однако для максимальной эффективности вы можете использовать переключатель MOSFET вместо диода. Эта конструкция известна как «синхронный выпрямитель» (см. рис. 12, 13 и 14). Выключатель синхронного выпрямителя разомкнут, когда главный выключатель замкнут, и наоборот. Для предотвращения перекрестной проводимости (одновременно включены верхний и нижний выключатели) схема переключения должна быть «размыкание перед замыканием». Из-за этого диод по-прежнему требуется проводить в течение интервала между размыканием главного выключателя и замыканием выключателя синхронного выпрямителя (мертвое время). Когда полевой МОП-транзистор используется в качестве синхронного переключателя, ток обычно течет в обратном направлении (от истока к стоку), и это позволяет встроенному в корпус диоду проводить ток в течение мертвого времени. Когда переключатель синхронного выпрямителя замыкается, ток протекает через канал MOSFET. Из-за очень низкого сопротивления канала для мощных полевых МОП-транзисторов стандартное прямое падение напряжения на выпрямительном диоде может быть уменьшено до нескольких милливольт. Синхронное выпрямление может обеспечить КПД значительно выше 90%.
Из-за этого диод по-прежнему требуется проводить в течение интервала между размыканием главного выключателя и замыканием выключателя синхронного выпрямителя (мертвое время). Когда полевой МОП-транзистор используется в качестве синхронного переключателя, ток обычно течет в обратном направлении (от истока к стоку), и это позволяет встроенному в корпус диоду проводить ток в течение мертвого времени. Когда переключатель синхронного выпрямителя замыкается, ток протекает через канал MOSFET. Из-за очень низкого сопротивления канала для мощных полевых МОП-транзисторов стандартное прямое падение напряжения на выпрямительном диоде может быть уменьшено до нескольких милливольт. Синхронное выпрямление может обеспечить КПД значительно выше 90%.
Рис. 14. Синхронное выпрямление для понижающей схемы. Обратите внимание на встроенный в корпус MOSFET диод.
Режим пропуска повышает эффективность легкой нагрузки
Во многих современных контроллерах переключения есть функция пропуска. Режим пропуска позволяет регулятору пропускать циклы, когда они не нужны, что значительно повышает эффективность при малых нагрузках. Для стандартной понижающей схемы (рис. 1) с выпрямительным диодом отсутствие запуска нового цикла просто позволяет току или энергии катушки индуктивности разрядиться до нуля. В этот момент диод блокирует любое обратное протекание тока индуктора, и напряжение на индукторе падает до нуля. Это называется «прерывистым режимом» и показано на рис. 15. В режиме пропуска новый цикл инициируется, когда выходное напряжение падает ниже порога регулирования. В режиме пропуска и прерывистой работе частота коммутации пропорциональна току нагрузки. Ситуация с синхронным выпрямителем, к сожалению, несколько сложнее. Это связано с тем, что ток катушки индуктивности может измениться на противоположный в переключателе MOSFET, если затвор остается открытым. В MAX8632 встроен компаратор, который определяет, когда ток через катушку индуктивности меняется на противоположный, и размыкает ключ, позволяя внутреннему диоду полевого МОП-транзистора блокировать обратный ток.
Режим пропуска позволяет регулятору пропускать циклы, когда они не нужны, что значительно повышает эффективность при малых нагрузках. Для стандартной понижающей схемы (рис. 1) с выпрямительным диодом отсутствие запуска нового цикла просто позволяет току или энергии катушки индуктивности разрядиться до нуля. В этот момент диод блокирует любое обратное протекание тока индуктора, и напряжение на индукторе падает до нуля. Это называется «прерывистым режимом» и показано на рис. 15. В режиме пропуска новый цикл инициируется, когда выходное напряжение падает ниже порога регулирования. В режиме пропуска и прерывистой работе частота коммутации пропорциональна току нагрузки. Ситуация с синхронным выпрямителем, к сожалению, несколько сложнее. Это связано с тем, что ток катушки индуктивности может измениться на противоположный в переключателе MOSFET, если затвор остается открытым. В MAX8632 встроен компаратор, который определяет, когда ток через катушку индуктивности меняется на противоположный, и размыкает ключ, позволяя внутреннему диоду полевого МОП-транзистора блокировать обратный ток.
Рис. 15. В прерывистом режиме дроссель полностью разряжается, после чего напряжение на дросселе остается равным нулю.
На рис. 16 показано, что режим пропуска обеспечивает повышенную эффективность при малой нагрузке, но за счет шума, поскольку частота коммутации не является фиксированной. Метод управления с принудительной ШИМ поддерживает постоянную частоту переключения и изменяет соотношение циклов зарядки и разрядки по мере изменения рабочих параметров. Поскольку частота коммутации фиксирована, спектр шума относительно узок, что позволяет простым методам фильтрации нижних частот или узкополосным режекторным фильтрам значительно снизить размах напряжения пульсаций. Поскольку шум может быть помещен в менее чувствительную полосу частот, ШИМ популярен в телекоммуникациях и других приложениях, где шумовые помехи вызывают беспокойство.
Рис. 16. Эффективность с режимом пропуска и без него.
Понижающий преобразователь высокой мощности
Силовые ключи MOSFET теперь интегрированы с контроллерами для формирования однокристальных решений, таких как схема MAX1945, показанная на рис. 17. Эта микросхема имеет металлическую пластину на нижней стороне, которая отводит тепло от кристалла, поэтому 28-контактный корпус TSSOP может рассеивать 1 Вт, что позволяет схеме подавать на нагрузку более 10 Вт. Благодаря частоте переключения 1 МГц размер выходной катушки индуктивности и конденсаторов фильтра можно уменьшить, что еще больше сэкономит ценное пространство и количество компонентов. По мере того, как технологии переключателей питания MOSFET продолжают совершенствоваться, производительность переключаемых режимов будет улучшаться, что приведет к дальнейшему снижению стоимости, размера и проблем управления температурой.
17. Эта микросхема имеет металлическую пластину на нижней стороне, которая отводит тепло от кристалла, поэтому 28-контактный корпус TSSOP может рассеивать 1 Вт, что позволяет схеме подавать на нагрузку более 10 Вт. Благодаря частоте переключения 1 МГц размер выходной катушки индуктивности и конденсаторов фильтра можно уменьшить, что еще больше сэкономит ценное пространство и количество компонентов. По мере того, как технологии переключателей питания MOSFET продолжают совершенствоваться, производительность переключаемых режимов будет улучшаться, что приведет к дальнейшему снижению стоимости, размера и проблем управления температурой.
Рис. 17. MAX1945 — это внутреннее коммутационное устройство на 6 А с уменьшенным количеством деталей и компактными размерами для экономии места на плате.
Понижающий преобразователь POL малой мощности
Высокоэффективные понижающие (понижающие) преобразователи MAX1836/MAX1837 обеспечивают заданное выходное напряжение 3,3 В или 5 В при напряжении питания до 24 В. С помощью внешних резисторов обратной связи выходное напряжение можно регулировать от 1,25 В до VIN. Внутренний коммутирующий MOSFET с ограничением по току обеспечивает ток нагрузки до 125 мА (MAX1836) или 250 мА (MAX1837). Уникальная схема управления с ограничением по току, работающая с рабочими циклами до 100 %, сводит к минимуму падение напряжения (120 мВ при 100 мА). Кроме того, эта схема управления снижает ток питания при малых нагрузках до 12 мкА. Высокие частоты переключения позволяют использовать миниатюрные катушки индуктивности для поверхностного монтажа и выходные конденсаторы. Понижающие преобразователи MAX1836/MAX1837 с внутренним переключающим МОП-транзистором доступны в 6-выводных корпусах SOT23 и TDFN размером 3 мм x 3 мм, что делает их идеальными для недорогих, маломощных и ограниченных по размеру приложений.
С помощью внешних резисторов обратной связи выходное напряжение можно регулировать от 1,25 В до VIN. Внутренний коммутирующий MOSFET с ограничением по току обеспечивает ток нагрузки до 125 мА (MAX1836) или 250 мА (MAX1837). Уникальная схема управления с ограничением по току, работающая с рабочими циклами до 100 %, сводит к минимуму падение напряжения (120 мВ при 100 мА). Кроме того, эта схема управления снижает ток питания при малых нагрузках до 12 мкА. Высокие частоты переключения позволяют использовать миниатюрные катушки индуктивности для поверхностного монтажа и выходные конденсаторы. Понижающие преобразователи MAX1836/MAX1837 с внутренним переключающим МОП-транзистором доступны в 6-выводных корпусах SOT23 и TDFN размером 3 мм x 3 мм, что делает их идеальными для недорогих, маломощных и ограниченных по размеру приложений.
Понижающий преобразователь nanoPower
MAX3864xA/B — семейство понижающих (понижающих) DC-DC преобразователей со сверхнизким током потребления 330 нА, работающих от входного напряжения от 1,8 В до 5,5 В и поддерживающих токи нагрузки до 175 мА, 350 мА, 700 мА с максимальной эффективностью. до 96%. В режиме отключения ток отключения составляет всего 5 нА. Устройства обеспечивают сверхнизкий ток покоя, малый общий размер решения и высокую эффективность во всем диапазоне нагрузок. MAX3864xA/B идеально подходят для аккумуляторных приложений, где требуется длительное время автономной работы. Семейство MAX3864xA/B использует уникальную схему управления, которая обеспечивает сверхнизкий ток покоя и высокую эффективность в широком диапазоне выходных токов. Устройства MAX3864xA/B предлагаются в компактном корпусе 1,42 x 0,89 мм.мм 6-контактный пакет уровня пластины (WLP) (2×3 выступа, шаг 0,4 мм), а также 2 мм x 2 мм, 6-контактный корпус µDFN.
до 96%. В режиме отключения ток отключения составляет всего 5 нА. Устройства обеспечивают сверхнизкий ток покоя, малый общий размер решения и высокую эффективность во всем диапазоне нагрузок. MAX3864xA/B идеально подходят для аккумуляторных приложений, где требуется длительное время автономной работы. Семейство MAX3864xA/B использует уникальную схему управления, которая обеспечивает сверхнизкий ток покоя и высокую эффективность в широком диапазоне выходных токов. Устройства MAX3864xA/B предлагаются в компактном корпусе 1,42 x 0,89 мм.мм 6-контактный пакет уровня пластины (WLP) (2×3 выступа, шаг 0,4 мм), а также 2 мм x 2 мм, 6-контактный корпус µDFN.
Резюме
Хотя методы переключения более сложны в реализации, схемы переключения почти полностью заменили линейные источники питания в широком диапазоне портативных и стационарных конструкций. Это связано с тем, что коммутационные схемы обеспечивают более высокую эффективность, меньшие по размеру компоненты и меньше проблем с управлением температурным режимом.
Основы, Работа, Дизайн и Эксплуатация
Много раз в мире электроники мы сталкиваемся с необходимостью уменьшить одно напряжение постоянного тока до более низкого. Например, нам может понадобиться питание микроконтроллера 3,3 В от шины питания 12 В. Решение простое, мы просто добавляем микросхему линейного стабилизатора 3,3 В, например LD1117, с шиной 12 В, и она регулирует напряжение до 3,3 В. Мы уже изучили работу регуляторов напряжения в нашей предыдущей статье.
Теперь предположим, что нам нужно запитать светодиодную ленту от той же шины 3,3 В. Светодиоды легко потребляют около 20 мА каждый, поэтому длинная полоса легко съест ампер или около того. Если рассчитать мощность, рассеиваемую регулятором:
P = (V in – V out ) * I out
Рассеиваемая мощность составляет около 8,7 Вт! Теперь это ОЧЕНЬ большая мощность для рассеивания небольшого линейного регулятора. Если мы подсчитаем КПД, который представляет собой просто выходную мощность, деленную на входную мощность, то получится жалкие 38%! Обычно линейные стабилизаторы напряжения имеют очень низкий КПД по сравнению с импульсными стабилизаторами.
Теперь мы остро нуждаемся в том, чтобы найти что-то, что могло бы понижать напряжение постоянного тока и делать это эффективно!
Введение в понижающие преобразователи
К счастью, такое устройство уже существует, и оно называется понижающим преобразователем или понижающим регулятором напряжения . Это тип преобразователя постоянного тока , поэтому он выполняет задачу, используя несколько транзисторных переключателей и катушку индуктивности. Типичная схема понижающего преобразователя показана на изображении выше.
Он очень похож на повышающий преобразователь, но расположение катушки индуктивности и транзистора меняется. Переключатель, показанный на приведенной выше схеме, обычно представляет собой переключатель силовой электроники, такой как MOSFET, IGBT или BJT. Переключатель будет переключаться (включаться и выключаться) с помощью сигнала ШИМ.
Работа понижающего преобразователя немного похожа на ШИМ-диммирование. Мы все слышали о приглушении света с помощью ШИМ-сигнала. Небольшой рабочий цикл означает, что среднее напряжение, воспринимаемое нагрузкой, мало, а когда рабочий цикл высокий, среднее напряжение также высокое.
Мы все слышали о приглушении света с помощью ШИМ-сигнала. Небольшой рабочий цикл означает, что среднее напряжение, воспринимаемое нагрузкой, мало, а когда рабочий цикл высокий, среднее напряжение также высокое.
Но среднее напряжение — это не то, что нам нужно — необработанный сигнал PWN колеблется между высоким уровнем напряжения и землей, чего не хотела бы чувствительная нагрузка (например, микроконтроллер). Конечно, подключение RC-фильтра к прямоугольному источнику делает выход чистым. Уровень напряжения фильтра зависит от скважности ШИМ-сигнала – чем выше скважность, тем выше выходное напряжение.
Итак, теперь у нас есть чистое выходное напряжение. На приведенном ниже графике необработанный ШИМ-сигнал показан синим цветом, а отфильтрованные выходы — красным и фиолетовым.
Теперь мы могли бы просто использовать его как понижающий преобразователь, но есть один существенный недостаток — резистор в RC-фильтре ограничивает ток и тратит энергию в виде тепла, что не лучше, чем в примере с линейным регулятором напряжения.
Чтобы решить эту проблему, мы обратимся к другому типу фильтра напряжения, LC-фильтру, который выполняет ту же работу, что и RC-фильтр, но заменяет R на L, другими словами, резистор на индуктор. Катушка индуктивности сопротивляется изменениям тока, а конденсатор сопротивляется изменениям напряжения, в результате чего на выходе получается плавный постоянный ток.
Теперь у нас есть преобразователь, способный понижать постоянное напряжение и делать это эффективно!
Работа понижающего преобразователя
Работу понижающего преобразователя можно разбить на несколько этапов.
ШАГ – 1:
Переключатель включается и пропускает ток к выходному конденсатору, заряжая его. Поскольку напряжение на конденсаторе не может возрастать мгновенно, а индуктор ограничивает зарядный ток, напряжение на крышке во время цикла переключения не является полным напряжением источника питания.
ШАГ – 2:
Теперь переключатель выключается. Поскольку ток в катушке индуктивности не может внезапно измениться, катушка индуктивности создает на ней напряжение. Это напряжение позволяет заряжать конденсатор и питать нагрузку через диод, когда ключ выключен, поддерживая текущий выходной ток в течение всего цикла переключения.
Поскольку ток в катушке индуктивности не может внезапно измениться, катушка индуктивности создает на ней напряжение. Это напряжение позволяет заряжать конденсатор и питать нагрузку через диод, когда ключ выключен, поддерживая текущий выходной ток в течение всего цикла переключения.
Эти два шага повторяются много тысяч раз в секунду, что приводит к непрерывному выводу.
Проектирование понижающего преобразователя
ШАГ – 1
Определите входное напряжение, выходное напряжение и ток.
Рабочий цикл преобразователя определяется по формуле:
DC = V out /V in
ШАГ – 2
Определить выходную мощность, то есть произведение выходного напряжения и тока . Это также входная мощность по закону сохранения энергии (хотя и не совсем так — ничто не эффективно на сто процентов!).
ШАГ — 3
Теперь разделите выходную мощность на выбранную частоту переключения, чтобы получить мощность, передаваемую за импульс.
Поскольку о катушках индуктивности проще говорить с точки зрения энергии, теперь мы можем предположить, что выходная мощность — это просто выходная энергия в секунду. Итак, если выходная мощность нашего преобразователя составляет 30 Вт, то мы можем сказать, что выходная энергия составляет тридцать джоулей в секунду.
ШАГ — 4
Теперь, когда у нас есть энергия на импульс, мы можем рассчитать индуктивность, используя входной ток и энергию:
L = 2E/I 2
Где E — энергия, передаваемая за импульс, а I — квадрат входного тока.
Используя значения индуктивности, частоты и рабочего цикла, теперь мы можем приступить к созданию простого повышающего преобразователя.
Выбор деталей
МОП-транзистор
Поскольку переключатель находится на стороне высокого напряжения, использование N-канального МОП-транзистора или биполярного NPN-транзистора не сработает, если только у нас нет самозагружаемого драйвера затвора. Хотя это возможно, это довольно сложно.
Хотя это возможно, это довольно сложно.
В этих обстоятельствах рекомендуется использовать устройство P-канала, они значительно упрощают требования к вождению, но помните, что они включаются при низком уровне ворот, поэтому потребуется инвертированный сигнал. Можно использовать IRF5210, у него приличное сопротивление 60 мОм и V DS -100 В, чего должно быть достаточно для большинства приложений. Тем не менее, есть много более качественных устройств, выбор которых полностью зависит от разработчика в зависимости от конкретного приложения.
Не забудьте использовать драйвер затвора для уменьшения коммутационных потерь!
ДИОД
Поскольку этот диод не должен работать с очень высокими напряжениями, а скорее с большими токами, было бы хорошим выбором конструкции использовать диод Шоттки с низким падением прямого напряжения для обеспечения эффективности.
КОНДЕНСАТОР
Значение конденсатора зависит от пульсаций выходного напряжения и может быть рассчитано с помощью уравнения для конденсатора, но обычно для слаботочных приложений должно быть достаточно значения от 100 мкФ до 680 мкФ.