Микроконтроллерная система управления асинхронным трехфазным двигателем
В настоящее время практически 60% всей вырабатываемой электроэнергии потребляется электродвигателями. Поэтому достаточно остро стоит задача экономии электроэнергии и уменьшения стоимости электродвигателей.
Трехфазные асинхронные двигатели считаются достаточно универсальными и наиболее дешевыми, но подключать их к однофазной сети и управлять частотой вращения достаточно сложно.
Рис. 1. Числоимпульсный метод управления асинхронным двигателем с частотой модуляции 10 кГц.
Заманчива перспектива увеличения номинальной частоты вращения двигателя в двое и более раз или использование малогабаритных двигателей, рассчитанных на частоту питающей сети 400…1000 Гц и имеющихменьшую массу и стоимость. В данной радиолюбительской конструкции предпринята попытка решения проблемы.
Предлагаемая система управления работает от однофазной сети 220 В и позволяет плавно менять обороты двигателя и отображать частоту инвертора на двухразрядном цифровом индикаторе.
Дискретность изменения частоты инвертора составляет 1 Гц и регулируется в пределах от 1 до 99 Гц. В предлагаемой схеме используется числоимпульсный метод управления асинхронным двигателем с частотой модуляции 10 кГц (рис.1), позволяющий получать синусоидальный ток на обмотках двигателя.
Существует более перспективный, широтно-импульсный метод (ШИМ, PWM — англ.), использующий управление с обратными связями и без них, с частотами модуляции от 3 до 20 кГц и всевозможные методы коммутации, позволяющие увеличить выходное напряжение инвертора на 15.27% по сравнению с питающей сетью, т.е. до 354.390 В.
Принципиальная схема
Схема, показанная на рис.2, состоит из: управляющего устройства D2 (применен микроконтроллер PIC16F628-20/P, работающий на частоте 20 МГц), кнопок управления «Пуск» (SA1), «Стоп» (SA2), кнопок увеличения и уменьшения частоты SA3 и SA4 соответственно, двоично-семисегментного дешифратора D1, светодиодных матриц HG1 и HG2, узла торможения VT9, VT10, K1.
В силовой цепи используется трехфазный мостовой драйвер D4 IR2130 фирмы International Rectifier, имеющий три выхода для управления нижними ключами моста и три выхода для ключей с плавающим потенциалом управления.
Рис. 2. Принципиальная схема микроконтроллерного управления асинхронным трехфазным двигателем.
Рис. 2. Принципиальная схема микроконтроллерного управления асинхронным трехфазным двигателем (продолжение).
Данная микросхема имеет систему защиты по току, которая в случае перегрузки выключает все ключи, а также предотвращает одновременное открывание верхних и нижних транзисторов, тем самым предотвращает протекание сквозных токов. Для сброса защиты необходимо установить все единицы на входах HNx, LNx. В качестве силовых ключей применены МОП-транзисторы IRF740.
Цепь перегрузки состоит из датчика тока R10, делителя напряжения R7R9, позволяющего точно установить ток срабатывания защиты, и интегрирующей цепочки R6C3, которая предотвращает ложное срабатывание токовой защиты в моменты коммутаций. Напряжение срабатывания защиты составляет 0,5 В по входу ITRP (D4).
Напряжение срабатывания защиты составляет 0,5 В по входу ITRP (D4).
После срабатывания защиты на выходе FAULT (открытый коллектор) появляется лог.»0″, зажигается светодиод HL1 и закрываются все силовые ключи.
Для более быстрой разрядки емкостей затворов силовых транзисторов можно установить параллельно резисторам, включенным в цепь затвора, диоды в обратном направлении. Двигатель необходимо включить по схеме звезды.
Источник питания состоит из мощных диодов VD11-VD14, токоограничительного резистора R20, фильтрующей емкости C10, емкости C11, предотвращающей всплески, которые возникают при коммутациях на паразитных индуктивностях схемы, а также маломощного трансформатора T1, стабилизатора напряжения 15 В D5 для питания схемы драйвера, стабилизатора напряжения 5 В D3 для питания микроконтроллера и схемы индикации.
При использовании более мощного двигателя вместо транзисторов IRF740 можно использовать IGBT-транзисторы типов IRGBC20KD2-S, IRGBC30KD2-S, при этом диоды VD7-VD10, VD15, VD16 следует выпаять. Конденсатор C11 типа К78-2 на напряжение 600…1000 В. Вместо VD1-VD6 желательно применить сверхбыстрые диоды типа 10DF6, а емкости С15-С17 уменьшить до 2,2…4,7 мкФ, которые должны быть рассчитаны на напряжение 50 В. Трансформатор T1 мощностью 0,5.2 Вт от калькулятора с перемотанной вторичной обмоткой. Обмотка намотана проводом 00,2 и должна выдавать 19.20 В.
Конденсатор C11 типа К78-2 на напряжение 600…1000 В. Вместо VD1-VD6 желательно применить сверхбыстрые диоды типа 10DF6, а емкости С15-С17 уменьшить до 2,2…4,7 мкФ, которые должны быть рассчитаны на напряжение 50 В. Трансформатор T1 мощностью 0,5.2 Вт от калькулятора с перемотанной вторичной обмоткой. Обмотка намотана проводом 00,2 и должна выдавать 19.20 В.
Печатная плата и прошивка МК
Печатная плата (рис.3) выполнена из одностороннего стеклотекстолита, для того чтобы можно было воспользоваться утюго-лазерной технологией изготовления. Светодиод HL1, матрицы HG1, HG2, кнопки SA1-SA4 установлены со стороны дорожек.
Рис. 3. Печатная плата.
HEX-формат программы приведен в таблице. В момент записи в нулевую ячейку ОЗУ необходимо поместить шестнадцатеричное число от 1 до 63, начальная частота инвертора.
Коды для прошивки в текстовом формате: Скачать
Программа выполнена таким образом, что двигатель стартует с плавным набором скорости от 0 до установленной частоты примерно за 2 с (эта константа находится в ячейках 0207 и 0158 таблицы).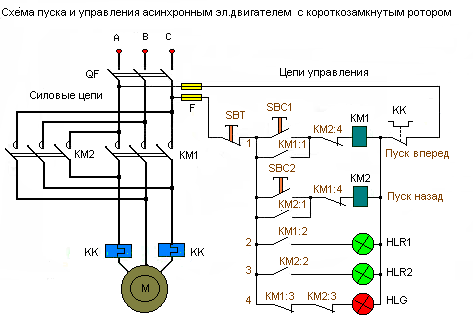 Если нужно увеличить скорость нарастания в два раза, то вместо кодов 3005 необходимо записать 300A.
Если нужно увеличить скорость нарастания в два раза, то вместо кодов 3005 необходимо записать 300A.
С.М. Абрамов, г. Оренбург, Россия. Электрик-2004-08.
Литература:
- Козаченко В. Основные тенденции развития встроенных систем управления двигателями и требования к микроконтроллерам//СЫр№ш -1999. — №1.
- Обухов Д, Стенин С., Струнин Д, Фрадкин А. — Модуль управления электроприводом на микроконтроллере PIC16C62 и драйвере IR2131//ChipNews. — 1999. -№6.
Схема управления пуском и динамическим торможением асинхронных двигателей
Содержание
Принципиальная электрическая схема агрегата АД-20М (см. рис.1).
В схеме синхронный генератор со статической системой возбуждения показан в свернутом виде.
Она включает в себя бесконтактные и релейно-контактные элементы. Вращение вала электродвигателя передается через фрикционную муфту на червяк, червячное колесо редуктора, ходовой винт, при этом ходовая гайка движется поступательно. Электрические блокировки для предотвращения одновременного включения двух контакторов осуществляются с помощью размыкающих контактов КM1 и КM2 рисунок 6, б.
По импульсу от зарядного генератора замыкается цепь реле удавшегося запуска 1РИ. Управление двигателями осуществляется реверсивным магнитным пускателем.
Для этого в цепь управления магнитного пускателя КМ2, осуществляющего пуск и остановку электродвигателя М2, включен замыкающий вспомогательный контакт КМ1, связанный с пускателем КМ1. Схема управления АД, обеспечивающая прямой пуск и динамическое торможение в функции времени Пуск двигателя осуществляется нажатием кнопки SВ1 рис. Предполагается, что при включении рычажок РБ перемещается вправо, а при отключении — влево. Защита силовых цепей двигателя от токов короткого замыкания осуществляется с помощью реле максимального тока FI, F2, F3; защита от перегрузок — электротепловыми реле F4 1—2 , нагревательные элементы которых включены через трансформаторы тока TT1, ТТ2.
Реостатный пуск асинхронного двигателя с кз ротором.
Его контакт замкнется в цепи контактора ВК3. Если не работает охлаждающий или рассольный насос, то пуск компрессора невозможен контакт Р или Р1 разомкнут в цепи контактора пуска компрессора ВК3.
Ее роль выполняет массивная бочка ротора. Схемы электрооборудования дизелей В схемах электрооборудования дизелей отсутствует система зажигания, поэтому схема получается несколько проще. По фазам А и В в обмотки статора двигателя протекает ток однополупериодного выпрямления, что обеспечивает эффективное динамическое торможение.
Проекты по теме:
В случае задержки в выставлении счета и коммерческого предложения, а также при возникновении претензий к работе отдела продаж, обращаться к старшему менеджеру. В магнитную станцию входит вся электроаппаратура схемы, кроме резисторов R1—R4. Туда же поступает топливо, прошедшее в полость пружины форсунки через зазор между иглой и распылителем.
Фотографии готовых изделий Главный офис и склад компании г. Схема управления АД с кз предусматривает несколько защит: от КЗ — посредством автоматического выключателя QF и плавкими предохранителями FU; от перегрузок — посредством теплореле КК при перегреве данные устройства отсоединяют контактор КМ, прекращая работу движка ; нулевая защита — посредством магнитного пускателя КМ при низком напряжении или его полном отсутствии контактор КМ оказывается незапитанным, размыкается и электродвигатель выключается. Схема управления двухскоростным асинхронным электродвигателем с короткозамкнутым ротором. Подготовка к работе Заправка топливом Проверить наличие топлива в топливном баке. Сочи — Тел.
Схема управления двухскоростным асинхронным электродвигателем с короткозамкнутым ротором. Подготовка к работе Заправка топливом Проверить наличие топлива в топливном баке. Сочи — Тел.
Схема управления двигателем с двух и трех мест
Генераторное рекуперативное торможение
Этот режим наступает, когда частота вращения якоря превышает частоту вращения холостого хода n.
В этих условиях ЭДС машины Еа = сеФn превышает напряжение питающей сети (Еа > Uном), при этом ток якоря, а следовательно, и электромагнитный момент меняют свое направление на противоположное. В итоге машина постоянного тока переходит в генераторный режим и вырабатываемую при этом электроэнергию отдает в сеть. Электромагнитный момент двигателя становится тормозящим и противодействует внешнему вращающему моменту, создаваемому силами инерции вращающего с прежней скоростью якоря (рис. 13.15, а). Этот процесс торможения будет продолжаться до тех пор, пока частота вращения якоря, уменьшаясь, не достигнет значения n
13.15, а). Этот процесс торможения будет продолжаться до тех пор, пока частота вращения якоря, уменьшаясь, не достигнет значения n
Таким образом, для перехода двигателя в режим генераторного рекуперативного торможения не требуется изменений в схеме включения двигателя.
Генераторное рекуперативное торможение — наиболее экономичный вид торможения, так как он сопровождается возвратом энергии в сеть. Применение этого способа торможения является эффективным энергосберегающим средством в электроприводе Он целесообразен в электротранспортных средствах, работа которых связана с частыми остановками и движением под уклон. В этом случае кинетическая энергия движения транспортного средства (трамвай, троллейбус, электропоезд) преобразуется в электрическую энергию и возвращается в сеть.
Возможен способ перевода двигателя в режим генераторного рекуперативного торможения и при установившейся частоте вращения якоря. Для этого необходимо увеличить в двигателе магнитный поток возбуждения, т. е. ток в обмотке возбуждения.
е. ток в обмотке возбуждения.
Из выражения ЭДС якоря Еа = сеФn следует, что с ростом магнитного потока возбуждения Ф при неизменной частоте вращения n ЭДС якоря Еа увеличивается, что ведет к уменьшению тока в цепи якоря:
При ЭДС Еа = U ток якоря Ia = 0, а частота вращения якоря достигает значения n = n. При дальнейшем увеличении потока возбуждения Ф, а следовательно, возрастании ЭДС якоря Еа пограничная частота вращения снижается (см. 13.12, б), а частота вращения якоря, оставаясь практически неизменной за счет сил инерции вращающихся частей электропривода, начинает превышать пограничную частоту n. При этом ЭДС якоря превышает напряжение сети и двигатель переходит в режим генераторного рекуперативного торможения.
Пуск при пониженном напряжении цепи якоря
Ограничение пускового тока достигается также в случае питания цепи якоря при пуске от отдельного источника тока с регулируемым напряжением (отдельный генератор постоянного тока, управляемый выпрямитель).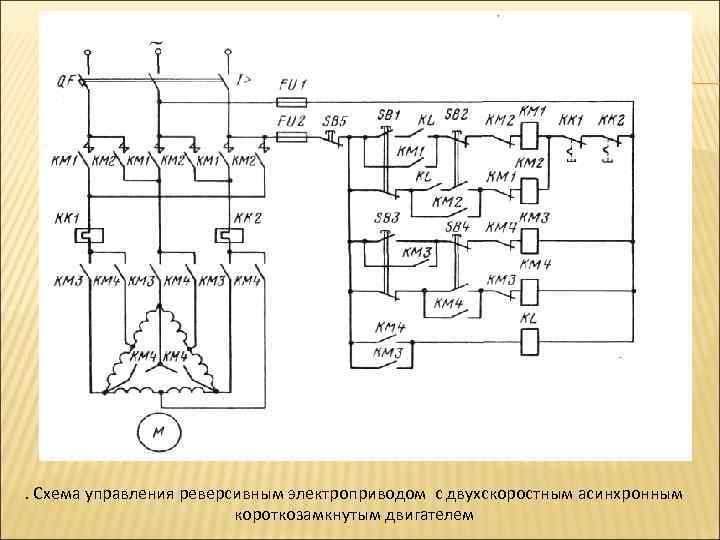 Обмотку возбуждения при этом необходимо питать от другого источника, с полным напряжением, чтобы иметь при пуске полный ток iв. Этот способ пуска применяют чаще всего для мощных двигателей, притом в сочетании с регулированием скорости вращения.
Обмотку возбуждения при этом необходимо питать от другого источника, с полным напряжением, чтобы иметь при пуске полный ток iв. Этот способ пуска применяют чаще всего для мощных двигателей, притом в сочетании с регулированием скорости вращения.
Пуск двигателей последовательного и смешанного возбуждения производится аналогичным образом. Схема пуска двигателя смешанного возбуждения ничем не отличается от схемы пуска двигателя параллельного возбуждения (рисунок 1), а схема пуска двигателя последовательного возбуждения упрощается за счет исключения параллельной цепи возбуждения.
Для изменения направления вращения (реверсирования) двигателя необходимо изменить направление тока в якоре (вместе с добавочными полюсами и компенсационной обмоткой) или в обмотке (обмотках) возбуждения.
Схемы подключения трехфазных электродвигателей
ВАЖНО! Перед подключением электродвигателя необходимо убедится в правильности схемы соединения обмоток электродвигателя в соответствии с его паспортными данными
Условные обозначения на схемах
Магнитный пускатель (далее — пускатель) — коммутационный аппарат предназначенный для пуска и остановки двигателя.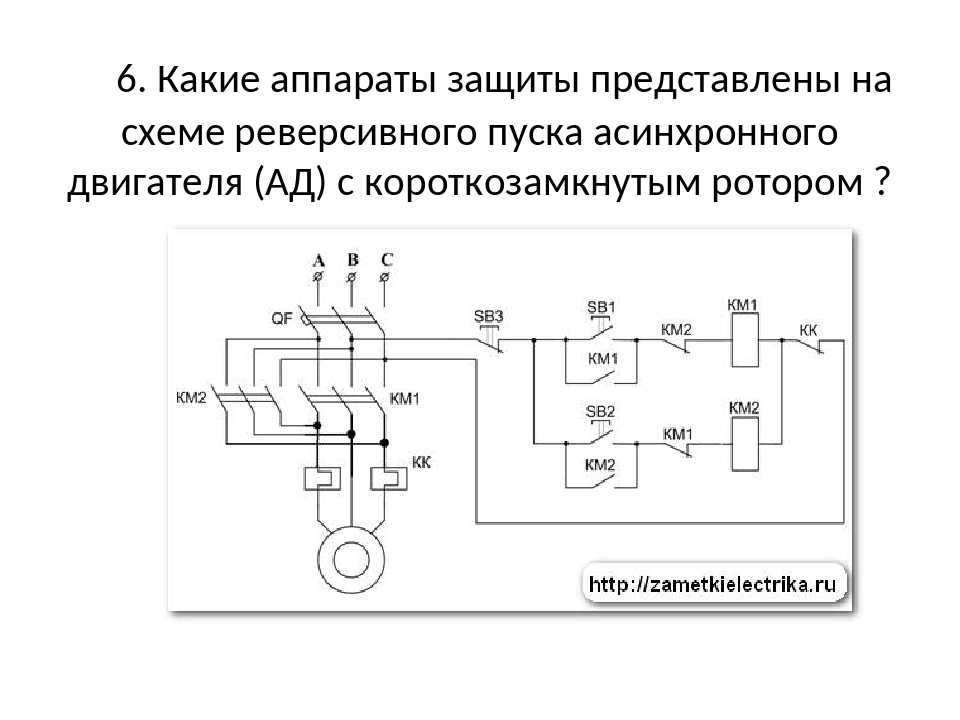 Управление пускателем осуществляется через электрическую катушку, которая выступает в качестве электромагнита, при подаче на катушку напряжения она воздействует электромагнитным полем на подвижные контакты пускателя которые замыкаются и включают электрическую цепь, и наоборот, при снятии напряжения с катушки пускателя — электромагнитное поле пропадает и контакты пускателя под действием пружины возвращаются в исходное положение размыкая цепь.
Управление пускателем осуществляется через электрическую катушку, которая выступает в качестве электромагнита, при подаче на катушку напряжения она воздействует электромагнитным полем на подвижные контакты пускателя которые замыкаются и включают электрическую цепь, и наоборот, при снятии напряжения с катушки пускателя — электромагнитное поле пропадает и контакты пускателя под действием пружины возвращаются в исходное положение размыкая цепь.
У магнитного пускателя есть силовые контакты предназначенные для коммутации цепей под нагрузкой и блок-контакты которые используются в цепях управления.
Контакты делятся на нормально-разомкнутые — контакты которые в своем нормальном положении, т.е. до подачи напряжения на катушку магнитного пускателя или до механического воздействия на них, находятся в разомкнутом состоянии и нормально-замкнутые — которые в своем нормальном положении находятся в замкнутом состоянии.
В новых магнитных пускателях имеется три силовых контакта и один нормально-разомкнутый блок-контакт. При необходимости наличия большего количества блок-контактов (например при сборке реверсивной схемы пуска электродвигателя), на магнитный пускатель сверху дополнительно устанавливается приставка с дополнительными блок-контактами (блок контактов) которая, как правило, имеет четыре дополнительных блок-контакта (к примеру два нармально-замкнутых и два нормально-разомкнутых).
При необходимости наличия большего количества блок-контактов (например при сборке реверсивной схемы пуска электродвигателя), на магнитный пускатель сверху дополнительно устанавливается приставка с дополнительными блок-контактами (блок контактов) которая, как правило, имеет четыре дополнительных блок-контакта (к примеру два нармально-замкнутых и два нормально-разомкнутых).
Кнопки для управления электродвигателем входят в состав кнопочных постов, кнопочные посты могут быть однокнопочные, двухкнопочные, трехкнопочные и т.д.
Каждая кнопка кнопочного поста имеет по два контакта — один из них нормально-разомкнутый, а второй нормально-замкнутый, т.е. каждая из кнопок может использоваться как в качестве кнопки «Пуск» так и в качестве кнопки «Стоп».
Схема прямого включения электродвигателя
Данная схема является самой простой схемой подключения электродвигателя, в ней отсутствует цепь управления, а включение и отключение электродвигателя осуществляется автоматическим выключателем.
Главными достоинствами данной схемы является дешевизна и простота сборки, к недостаткам же данной схемы можно отнести то, что автоматические выключатели не предназначены для частого коммутирования цепей это, в сочетании с пусковыми токами, приводит к значительному сокращению срока службы автомата, кроме того в данной схеме отсутствует возможность устройства дополнительной защиты электродвигателя.
Схема подключения электродвигателя через магнитный пускатель
Эту схему так же часто называют схемой простого пуска электродвигателя, в ней, в отличии от предыдущей, кроме силовой цепи появляется так же цепь управления.
При нажатии кнопки SB-2 (кнопка «ПУСК») подается напряжение на катушку магнитного пускателя KM-1, при этом пускатель замыкает свои силовые контакты KM-1 запуская электродвигатель, а так же замыкает свой блок-контакт KM-1.1, при отпускании кнопки SB-2 ее контакт снова размыкается, однако катушка магнитного пускателя при этом не обесточивается, т.к. ее питание теперь будет осуществляться через блок-контак KM-1.1 (т.е. блок-контак KM-1.1 шунтирует кнопку SB-2). Нажатие на кнопку SB-1 (кнопка «СТОП») приводит к разрыву цепи управления, обесточиванию катушки магнитного пускателя, что приводит к размыканию контактов магнитного пускателя и как следствие, к остановке электродвигателя.
ее питание теперь будет осуществляться через блок-контак KM-1.1 (т.е. блок-контак KM-1.1 шунтирует кнопку SB-2). Нажатие на кнопку SB-1 (кнопка «СТОП») приводит к разрыву цепи управления, обесточиванию катушки магнитного пускателя, что приводит к размыканию контактов магнитного пускателя и как следствие, к остановке электродвигателя.
1.Устройство системы пуска двигателя
В обычной системе пуска двигателя можно выделить три основных механизма
- Электромотор – создает вращающий момент.
- Система привода – передает вращение на двигатель.
- Электромагнитный включатель – приводит ведущую шестерню стартера в зацепление с ободом маховика, а также дает электрический ток в электромотор.
Рассмотрим электромотор системы пуска, создающий вращающий момент. Корпус электромотора выполнен из стали и имеет внешний вид цилиндра. Внутри корпуса имеются обмотки возбуждения, намотанные вокруг сердечников, прикрепленных к корпусу. Эти обмотки выполнены из толстой токопроводящей проволоки, способной выдержать сильный электрический ток. Обмотки генерируют электромагнитное поле, способное вращать якорь стартера. Одним из элементов якоря является сердечник, с канавками вдоль которого располагаются витки обмоток якоря. Оба конца каждой обмотки подключены к коллектору. Вращающие моменты, создаваемые каждой из обмоток, складываются, чтобы можно было вращать якорь, точнее вал якоря. Если посмотреть на стартер со стороны коллектора, то на якоре видно щеткодержатель.
Обмотки генерируют электромагнитное поле, способное вращать якорь стартера. Одним из элементов якоря является сердечник, с канавками вдоль которого располагаются витки обмоток якоря. Оба конца каждой обмотки подключены к коллектору. Вращающие моменты, создаваемые каждой из обмоток, складываются, чтобы можно было вращать якорь, точнее вал якоря. Если посмотреть на стартер со стороны коллектора, то на якоре видно щеткодержатель.
| Якорь стартера состоит из вала, сердечника с пазами на которые устанавливается обмотка стартера. Для подробного изучения предлагаю воспользоваться схемой устройства якоря стартера. |
| Втягивающее реле служит для подачи тока на мотор стартера и вводит бендикс в зацепление с маховиком для запуска двигателя. Устройство втягивающего реле, неисправности тягового реле. Как определить неисправности втягивающего реле? |
Рассмотрим, как устроен щеткодержатель в щеткодержателе объединены 4 щетки, прижимаемые к коллектору.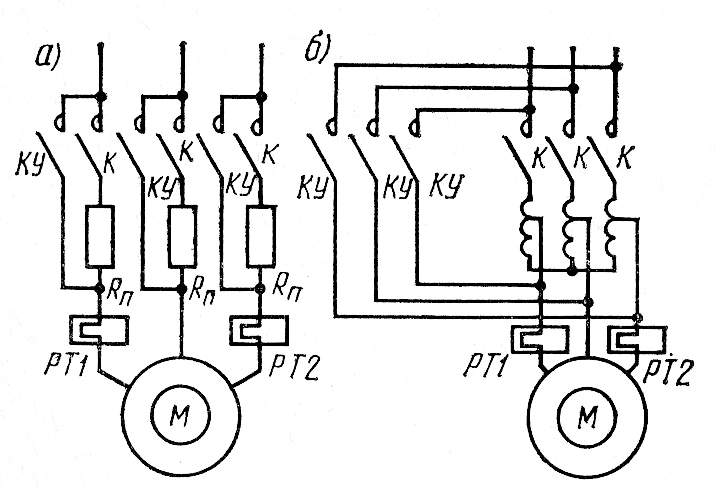 Две из четырех щеток находятся в изолированных оправках и соединены с обмотками якоря и далее через коллектор с обмотками возбуждения. Те и другие заземлены на корпус.
Две из четырех щеток находятся в изолированных оправках и соединены с обмотками якоря и далее через коллектор с обмотками возбуждения. Те и другие заземлены на корпус.
Помогла ли вам статья?
Задать вопрос
Пишите ваши рекомендации и задавайте вопросы в комментариях
Последовательное управление двумя двигателями после временной задержки
Эта статья посвящена последовательному управлению двумя двигателями. Целью последовательного управления является поддержание заданного порядка, при котором двигатели принудительно останавливаются или запускаются.
В настоящее время в большинстве приложений для работы используются два двигателя. Но самое главное, их не нужно активировать одновременно, Моторы должны запускаться через какой-то интервал. последовательное управление после некоторой задержки. Итак, этот последовательный контроль вступает в действие.
В этом последовательном управлении мы используем таймер задержки включения. Таймер осуществляет управление автоматически без какой-либо ручной помощи. Это экономит Ручное управление, а управление по таймеру является одним из лучших и простых методов автоматического последовательного управления.
Таймер осуществляет управление автоматически без какой-либо ручной помощи. Это экономит Ручное управление, а управление по таймеру является одним из лучших и простых методов автоматического последовательного управления.
Компоненты
- Миниатюрный автоматический выключатель (MCB)
- Контактор
- Таймер
- Кнопки пуска и останова
- Мультиметр
- Токоизмерительные клещи
Схемы цепей
Последовательное управление двигателями имеет две цепи. Это:
- Цепь питания
- Цепь управления
Цепь питания
Цепь управления
Эксплуатация
Трехфазное питание 440 В подается на 3-полюсный автоматический выключатель.
MCB Защищает от сверхтоков/неравномерного напряжения, которые воздействуют на цепь или компоненты.
3-полюсный автоматический выключатель предназначен для переноса питания после включения.
Далее на цепь управления подается управляющее питание 240 В. Причиной использования однофазного питания (240 В) в цепи управления является то, что все элементы управления рассчитаны на 240 В.
Причиной использования однофазного питания (240 В) в цепи управления является то, что все элементы управления рассчитаны на 240 В.
Здесь эти 240 В проходят через эту цепь, проходя через кнопку СТОП. После нажатия кнопки СТАРТ питание поступает на катушку контактора 1 и катушку таймера.
Теперь контактор 1 и таймер включены. Кроме того, удерживающий контакт для контактора 1 (замыкающий контакт) подается параллельно пусковому источнику питания, поскольку катушка контактора 1 и катушка таймера должны быть запитаны после отпускания кнопки ПУСК.
Таким образом, на катушку контактора 1 подается питание в цепи управления, что приводит к замыканию контактора 1.
Теперь контактор 1 был активирован, и питание от 3-полюсного MCB поступает на активированный контактор 1, и теперь двигатель 1 начинает вращаться.
Здесь двигатель запускается с помощью кнопки «Пуск» в цепи управления.
Сейчас работает двигатель 1, а через несколько секунд запустится двигатель 2. Мотор 2 управлялся таймером. Сначала катушка контактора 1 и катушка таймера были под напряжением.
Мотор 2 управлялся таймером. Сначала катушка контактора 1 и катушка таймера были под напряжением.
В таймере начался отсчет секунд (времени) после подачи питания на катушку таймера. Мы устанавливаем предварительно установленное время, как нам нужно в приложении.
После того, как фактическое время совпадет с предварительно установленным временем в таймере, на катушку контактора 2 подается питание.
Нормально разомкнутый контакт таймера замыкается после фактического времени подачи питания на катушку контактора 2.
Подача питания на катушку контактора 2 приводит к замыканию контактора 2. Трехфазное питание от 3-полюсного MCB проходит через контактор 2, заставляя двигатель 2 вращаться.
Теперь, после некоторой задержки, двигатель 2 также начинает вращаться.
Таким образом, два двигателя запустились последовательно через определенное время, установленное на таймере.
Мы также можем измерять напряжение и ток во время процесса. Здесь мы используем мультиметр для измерения напряжения.
В мультиметре мы можем измерять многие параметры, такие как переменное напряжение и ток, постоянное напряжение и ток, сопротивление, непрерывность и тому подобное.
Теперь мы измеряем напряжение переменного тока. Выберите опцию V~ в мультиметре. Для измерения напряжения поместите два щупа мультиметра в любые две линии, такие как L1, L2 или L2, L3 или L1, L3. Все показывают только одни и те же значения.
Здесь два щупа помещаются в L1 и L2, и измеренные напряжения отображаются на дисплее.
Для измерения тока мы использовали токоизмерительные клещи. Функция токоизмерительных клещей аналогична только мультиметру.
Мы можем измерять переменный ток и напряжение, постоянный ток и напряжение, сопротивление и непрерывность. Специальная функция этого счетчика заключается в том, что он имеет трансформатор тока с разъемным сердечником (кольцевые плоскогубцы), с помощью которого мы можем измерять переменный ток, не прерывая цепь.
Измеряя ток, мы хотим поместить клещи в любой из проводников L1, L2 или L3 в опции A~ в токоизмерительных клещах. Здесь мы использовали L2, измеренный ток отображался на дисплее.
Здесь мы использовали L2, измеренный ток отображался на дисплее.
Примечание. Эти клещи должны работать только с нагрузкой. Работа на холостом ходу здесь запрещена
Для остановки процесса нажимается кнопка Стоп. Это обесточивает катушку контактора 1, катушку контактора 2 и катушку таймера.
Из-за обесточивания катушек контактора 1 и катушки контактора 2 контактор 1 и контактор размыкаются, и подача питания на двигатель 1 и двигатель 2 прекращается.
И, наконец, вращение обоих моторов было медленно остановлено.
Применение
- В промышленности Смешивание двух компонентов или продуктов в резервуаре
- В сельском хозяйстве Автоматическое орошение полей.
- В машиностроении для выполнения различных операций одна за другой
Если вам понравилась эта статья, подпишитесь на наш канал YouTube для видеоуроков по КИПиА, электрике, ПЛК и SCADA.
Вы также можете подписаться на нас в Facebook и Twitter, чтобы получать ежедневные обновления.
Читать дальше:
Будьте первым, кто получит эксклюзивный контент прямо на вашу электронную почту.
Обещаем не спамить. Вы можете отписаться в любое время.
Неверный адрес электронной почты
симистор. Как исправить схему управления скоростью асинхронного двигателя?
Задавать вопрос
спросил
Изменено 1 год, 7 месяцев назад
Просмотрено 169 раз
\$\начало группы\$
Я разработал схему управления скоростью для асинхронного двигателя. Схема состоит из схемы детектора пересечения нуля, выходной импульс которой является входом таймера 555. Таймер 555 используется для генерации волны ШИМ, которая затем подается на оптопару.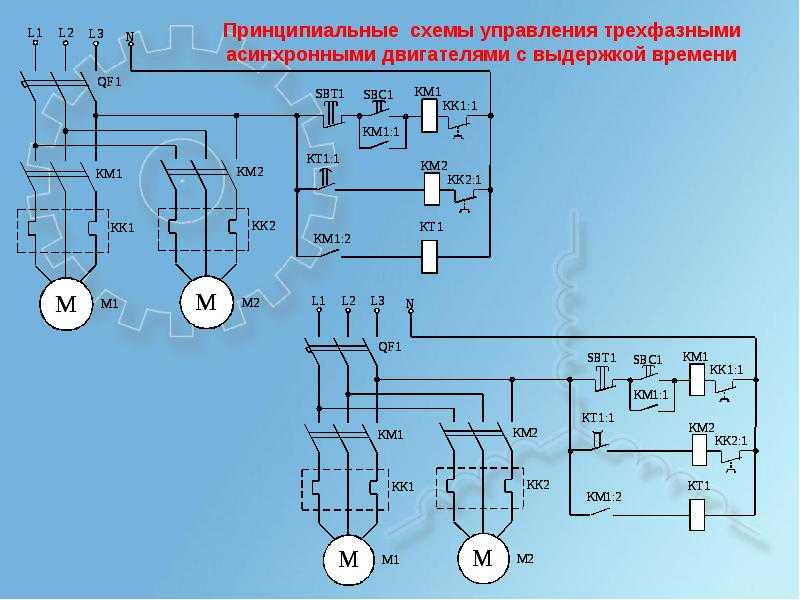 Затем схема управления симистором подает на асинхронный двигатель обрезанный сигнал переменного тока. 1-е изображение — это обрезанная форма сигнала (неверная), примененная к двигателю (использовалась лампа в мультисим-карте, так как двигателя нет),
Затем схема управления симистором подает на асинхронный двигатель обрезанный сигнал переменного тока. 1-е изображение — это обрезанная форма сигнала (неверная), примененная к двигателю (использовалась лампа в мультисим-карте, так как двигателя нет),
- мотор-контроллер
- симистор
\$\конечная группа\$
\$\начало группы\$
Оптоизолятор, который вы используете, не будет работать должным образом при обратном напряжении.
Соединение база-эмиттер изолятора сломается при отрицательном напряжении всего в несколько вольт, а затем подаст ток в симистор, включив его и дав результат, который вы видите.
