Как уменьшить загрязнение пилот-сигналов в бесклеточных MIMO-системах. Какие существуют методы назначения пилот-сигналов для повышения спектральной эффективности. Чем отличаются неперегруженное, полуперегруженное и перегруженное назначение пилот-сигналов. Как применить проекцию подпространства для улучшения оценки канала.
Проблема загрязнения пилот-сигналов в бесклеточных MIMO-системах
Бесклеточные массивные MIMO-системы (CF-mMIMO) позволяют устранить границы сот и повысить производительность пользовательского оборудования (UE) независимо от его географического положения. Однако в таких системах возникает проблема загрязнения пилот-сигналов при их повторном использовании, что ухудшает точность оценки канала.
Загрязнение пилот-сигналов происходит, когда несколько UE используют один и тот же пилотный сигнал. Это приводит к ошибкам в оценке канала и снижает спектральную эффективность системы. Поэтому разработка эффективных методов назначения пилот-сигналов является важной задачей для CF-mMIMO систем.

Метод проекции подпространства для уменьшения загрязнения пилот-сигналов
Одним из перспективных подходов к решению проблемы загрязнения пилот-сигналов является метод проекции подпространства (SP). Идея метода заключается в следующем:
- Каждый радиоблок (RU) и канал UE имеют индивидуальное подпространство канала
- Применяется обработка дискретного преобразования Фурье (DFT) на стороне приемника
- DFT используется для проецирования сигналов в подпространство каждого пользователя
- Это позволяет выделить подпространство желаемого UE и устранить загрязнение от других UE
Исследования показали, что метод SP может значительно уменьшить эффект загрязнения пилот-сигналов, обеспечивая производительность системы, близкую к случаю с идеальной информацией о состоянии канала.
Неперегруженное назначение пилот-сигналов
При неперегруженном назначении пилот-сигналов каждый RU назначает отдельные пилоты всем связанным с ним UE. Процесс назначения происходит следующим образом:
- UE выбирает ведущий RU с максимальным коэффициентом крупномасштабного замирания (LSFC)
- Выбранный RU должен иметь свободные пилот-сигналы
- Для UE выбирается пилот-сигнал с наименьшими помехами
- Формируется кластер RU для обслуживания UE
Преимущество неперегруженного назначения — отсутствие конфликтов пилот-сигналов. Недостаток — ограниченная гибкость при большом числе UE.
Полуперегруженное назначение пилот-сигналов
Полуперегруженный подход позволяет RU назначать один пилот-сигнал нескольким UE с ортогональными подпространствами. Особенности метода:
- RU получают информацию о подпространствах UE до выбора ведущего RU
- UE выбирает RU с максимальным LSFC среди тех, где его подпространство ортогонально подпространствам других UE
- Формирование кластера происходит только с RU, где подпространства UE ортогональны
Это позволяет повысить гибкость назначения пилот-сигналов при сохранении эффективности проекции подпространства.
Перегруженное назначение пилот-сигналов
При перегруженном назначении один пилот-сигнал может использоваться несколькими UE без ограничений на ортогональность подпространств. Особенности подхода:
- Кластеры UE формируются заранее без учета загрязнения пилот-сигналов
- Затем происходит распределение пилот-сигналов между UE
- Используется графовая модель для оптимизации назначения
- Учитывается взаимное влияние UE при назначении пилот-сигналов
Перегруженное назначение обеспечивает максимальную гибкость, но требует эффективных методов подавления загрязнения пилот-сигналов.
Сравнение методов назначения пилот-сигналов
Рассмотренные подходы к назначению пилот-сигналов имеют свои преимущества и недостатки:
- Неперегруженное назначение обеспечивает отсутствие конфликтов, но ограничено в гибкости
- Полуперегруженное назначение повышает гибкость при сохранении эффективности проекции подпространства
- Перегруженное назначение дает максимальную гибкость, но требует дополнительных методов подавления помех
Выбор оптимального метода зависит от конкретных параметров системы и требований к производительности. Комбинация различных подходов позволяет достичь наилучших результатов.
Оценка канала с использованием проекции подпространства
Применение метода проекции подпространства позволяет улучшить оценку канала в CF-mMIMO системах. Основные этапы оценки:
- Получение пилотных сигналов DMRS на RU
- Формирование оценок канала методом согласованной фильтрации
- Проекция полученных оценок на подпространство канала UE
- Подавление загрязнения от других UE с ортогональными подпространствами
Такой подход позволяет значительно уменьшить влияние загрязнения пилот-сигналов и повысить точность оценки канала.
Влияние назначения пилот-сигналов на спектральную эффективность
Выбор метода назначения пилот-сигналов оказывает существенное влияние на спектральную эффективность CF-mMIMO системы:
- Неперегруженное назначение обеспечивает базовый уровень эффективности
- Полуперегруженное назначение позволяет повысить эффективность за счет увеличения числа обслуживаемых UE
- Перегруженное назначение дает максимальный прирост при эффективном подавлении помех
Для достижения наилучших результатов необходимо выбирать метод назначения с учетом конкретных параметров системы и применять эффективные алгоритмы оценки канала и подавления помех.
«Радиолоцман» №1-2 (январь-февраль) 2022
Содержание:
Новости
MikroElektronika выпускает плату генератора сигналов сложной формы
Двухканальные драйверы затворов компании STMicroelectronics оптимизируют и упрощают управление IGBT и SiC MOSFET
Четыре бельгийские школы доставляют Интернет через инфракрасный порт Li-Fi
Nexperia выпустила самый миниатюрный в мире транслятор уровней для интерфейсов SD карт
Статьи
Способы стабилизации выходного напряжения обратноходовых преобразователей
Уменьшение уровня электромагнитных помех импульсных преобразователей путем оптимизации размещения элементов на печатной плате
Как вдвое уменьшить шум источника опорного напряжения
Генератор на таймере 555 с независимой регулировкой коэффициента заполнения и частоты
Ограничитель пускового тока защищает от короткого замыкания
Как подавлять электромагнитные помехи в импульсных источниках питания
Драйвер светодиодов для мощных вспышек систем машинного зрения
Схемы
Подключение часов реального времени DS1307 к микроконтроллеру STM8 через модуль I2C
Электронный предохранитель для настройки и эксплуатации низковольтных устройств
Простая схема управления направлением и скоростью вращения двигателя
Подавление дребезга контактов с помощью встроенных в микроконтроллер EFM8LB1 конфигурируемых логических элементов
Широкодиапазонные генераторы линейно изменяющегося напряжения
Входная цепь осциллографа на основе звуковой карты
Схема АРУ с динамическим диапазоном 60 дБ
Защита токоизмерительного усилителя от бросков напряжения
Простой способ снижения мощности, рассеиваемой обмоткой реле
Генераторы ступенчато качающейся частоты
Германиевый преобразователь запускается при напряжении 260 мВ
Драйвер белых светодиодов высокой мощности для портативных приложений
Работа нескольких источников питания на общую нагрузку
Использование вывода MCLR микроконтроллера PIC в качестве выхода
LDO регулятор с ультранизким уровнем шумов
Однопроводный интерфейс клавиатуры для микроконтроллера
Как я сделал Open Source монитор качества воздуха icaRUS
Бутстрепная цепь ускоряет активацию соленоида
Драйвер светодиодов, инвариантный к их количеству и типу
Недорогой размыкатель цепи с автоматическим восстановлением
Линейный преобразователь сопротивление-время
Ступенчато-цифровое и плавное управление частотой LC-генератора
Визуальный тестер напряжения на одном ОУ
Компенсация ошибок повышает точность источника втекающего тока
Зарядовые насосы на микросхеме TLC555-Q1
Фоторезистор в цепи обратной связи ОУ обеспечивает линейность отклика
Издательство: РадиоЛоцман
Язык: русский
Формат: pdf
Страниц: 134
Размер: 7,21 Мб
Скачать журнал «Радиолоцман» №1-2 (январь-февраль) 2022
• Turbobit •
Ctrl
Enter
Заметили ошЫбку
Выделите текст и нажмите Ctrl+Enter
Добавитьв мою ленту
Комментарии (0)
Информация
Посетители, находящиеся в группе Гости, не могут оставлять комментарии к данной публикации.
Funkamateur 2022
Funkamateur — 2022 Jahrgang 12 ausgabe | True PDF PDF (extract from CD) | 100.7 MB Funkamateur ist eine…
06.02.23
10
Funkamateur 2021
Funkamateur — 2021 Jahrgang 12 ausgabe | True PDF PDF (extract from CD) | 100.8 MB Funkamateur ist eine…
06.02.23
11
Efaster — быстрый поиск электронных компонентов
Вышел электронный журнал «РадиоЛоцман» 2022, 07-08
Электронный журнал в формате PDF для разработчиков электроники. Распространяется бесплатно на сайте РадиоЛоцман.
Скачать бесплатно полную версию журнала «РадиоЛоцман» 2022, 07-08 — июль-август (5.9 Мб). Download
|
 ниже)
ниже)При любом использовании материалов, опубликованных в журнале, ссылка (прямая) на РадиоЛоцман обязательна.
Полное или частичное воспроизведение или тиражирование, каким бы то ни было способом, материалов настоящего издания допускается только с письменного разрешения редакции.
Содержание:
- Новости
- Новый материал ускорит переход с литиевых на натрий-ионные аккумуляторы
- Toshiba выпускает сильноточный оптоизолированный интеллектуальный драйвер для управления затворами IGBT и MOSFET
- u-blox выпускает самый миниатюрный в мире модуль GPS
- STMicroelectronics представляет автомобильный контроллер верхнего плеча с гибкой диагностикой и защитой
- Введен в эксплуатацию новый участок для экспериментального производства GaN-Si транзисторов
- STMicroelectronics представляет Bluetooth СнК следующего поколения с функцией позиционирования
- Статьи
- Рекомендации по запуску источников питания двигателей постоянного тока с постоянными магнитами
- Целочисленно-варьируемый умножитель частоты цифровых сигналов
- Использование популярных платформ в промышленных системах
- Универсальный двухвходовый логический элемент AND/NAND, OR/NOR, XOR/XNOR
- Параллельный регулятор решает проблемы запуска источника питания
- Схемы
- К вопросу об улучшении линейности фототранзисторов
- Барометр-гигрометр-термометр с питанием от таблеточной батарейки
- Двухтранзисторный транслятор заменяет целую микросхему
- Детектор фотонов гамма-излучения
- Малопотребляющая схема обнаружения коротких замыканий
- Микроконтроллер формирует аналоговые кривые Гаусса без использования ЦАП
- Программируемый инструментальный усилитель на основе плавающего конденсатора и отрицательной постоянной времени
- Усилитель с мультиплексируемыми входами, программируемым усилением, измерительными входами и функцией слежения и удержания
- Логические элементы «И-НЕ» управляют дренажным насосом
- Мощный шунтовой регулятор на основе биполярного транзистора и микросхемы ИОН
- Низковольтный транслятор напряжения 1.
 8 В в 5 В
8 В в 5 В - Немного начальной математики для создания недорогого нелинейного интерфейса термопары
- Обмотка рекуперации энергии утечки питает DC/DC преобразователь
- Два D-триггера обеспечивают высокое быстродействие и точность ПНЧ
- Экономичный тестер контроля целостности цепей
- Универсальный логический элемент на одном транзисторе
- Самое маленькое IoT устройство на ESP8266-01
- Схема активной подтяжки экономит энергию
- Контроллер резонансного преобразователя на основе одной микросхемы и ждущего мультивибратора
- Эффективная схема управления скоростью вращения вентилятора
- Стабилизатор 12 В/3 А с широким диапазоном входных напряжений
- Простой отключаемый фильтр
- Защита от замыканий источника питания петли 4-20 мА
- Прецизионный усилитель с синхронным детектированием для измерения низких напряжений
- Простой логометрический метод измерения очень малых сопротивлений
- Токовый шунт с нулевым падением напряжения на основе инструментального усилителя
- Экономичный проблесковый маячок
- Схема контроля высоковольтного источника питания
- Быстродействующий буфер на дискретных транзисторах
- Простая регулируемая нагрузка постоянного тока для тестирования слаботочных источников питания
- Параллельное включение вдвое уменьшает шум усилителя с автоподстройкой нуля
- Датчик воздушного потока на основе пары Дарлингтона с самоподогревом
- Таймер напряжения контролирует время подключения нагрузки к сети переменного тока
- Удаленный датчик температуры с батарейным питанием управляет токовой петлей 4-20 мА
Назначение эффективного перегруженного пилота с деконтаминацией пилота для бесклеточных систем
Введение
Большое количество работ по теории беспроводной связи посвящено совместной обработке пространственно-распределенных антенн. Эта идея восходит к работе Wyner
[wyner1994shannon] и несколько раз «перепродавалась» под разными названиями с небольшими нюансами, такими как координатная многоточечная (CoMP), облачная сеть радиодоступа (CRAN), и в настоящее время он продвигается как бесклеточный массивный MIMO (CF-mMIMO).
Как следует из названия, одной из целей CF-mMIMO является устранение границ сот и предотвращение снижения производительности пользовательского оборудования (UE) в зависимости от их географического положения.
Эта идея восходит к работе Wyner
[wyner1994shannon] и несколько раз «перепродавалась» под разными названиями с небольшими нюансами, такими как координатная многоточечная (CoMP), облачная сеть радиодоступа (CRAN), и в настоящее время он продвигается как бесклеточный массивный MIMO (CF-mMIMO).
Как следует из названия, одной из целей CF-mMIMO является устранение границ сот и предотвращение снижения производительности пользовательского оборудования (UE) в зависимости от их географического положения.
Получение информации о состоянии канала (CSI) с пилот-сигналами на стороне антенны инфраструктуры важно для использования преимущества пространственного мультиплексирования CF-mMIMO. В этой статье мы сосредоточимся на оценке канала восходящей линии связи (UL) в дуплексной системе с временным разделением (TDD). Благодаря операциям TDD и взаимности каналов эти оценки также можно использовать для предварительного кодирования нисходящей линии связи
 Как правило, количество ортогональных пилот-сигналов ограничено, чтобы уменьшить накладные расходы и удержать фазу обучения в рамках времени когерентности.
Таким образом, повторное использование пилот-сигнала неизбежно приводит к увеличению числа UE, подлежащих размещению, и вызывает загрязнение пилот-сигнала.
Кроме того, система CF-mMIMO не имеет четких границ, трудно применить ограничение повторного использования пилот-сигнала на основе сот.
Поскольку загрязнение пилот-сигнала ухудшает точность оценки канала, это решается для повышения производительности системы.
Как правило, количество ортогональных пилот-сигналов ограничено, чтобы уменьшить накладные расходы и удержать фазу обучения в рамках времени когерентности.
Таким образом, повторное использование пилот-сигнала неизбежно приводит к увеличению числа UE, подлежащих размещению, и вызывает загрязнение пилот-сигнала.
Кроме того, система CF-mMIMO не имеет четких границ, трудно применить ограничение повторного использования пилот-сигнала на основе сот.
Поскольку загрязнение пилот-сигнала ухудшает точность оценки канала, это решается для повышения производительности системы.
В качестве одного из пилотных методов дезактивации, в [goettsch3021impact, goettsch_WCNC2022_arxiv]
, мы исследовали оценку канала на основе проекции подпространства (SP), которая использует обработку дискретного преобразования Фурье (DFT) на стороне приемника.
В этой статье подпространство канала означает пространство на доминирующих сигналах ковариационной матрицы канала MIMO, которое наблюдается с применением анализа главных компонентов (PCA). Кроме того, предполагая однородные линейные массивы (ULA) и однородные плоские массивы (UPA), подпространство ковариационной матрицы приблизительно диагонализуется с помощью DFT.
Поэтому предлагаемый нами SP использует DFT для проецирования сигналов в подпространство каждого пользователя.
Если антенны имеют корреляцию из-за ограниченного углового разброса рассеяния, каждый радиоблок (RU) и канал UE имеют индивидуальное подпространство канала.
Таким образом, эта проекция выделяет подпространство желаемого UE и устраняет загрязнение пилот-сигнала от UE второго пилота.
Мы показали, что эффект загрязнения пилота может быть значительно уменьшен с помощью SP, обеспечивая производительность системы, близкую к случаю идеального CSI 9.0007
Кроме того, предполагая однородные линейные массивы (ULA) и однородные плоские массивы (UPA), подпространство ковариационной матрицы приблизительно диагонализуется с помощью DFT.
Поэтому предлагаемый нами SP использует DFT для проецирования сигналов в подпространство каждого пользователя.
Если антенны имеют корреляцию из-за ограниченного углового разброса рассеяния, каждый радиоблок (RU) и канал UE имеют индивидуальное подпространство канала.
Таким образом, эта проекция выделяет подпространство желаемого UE и устраняет загрязнение пилот-сигнала от UE второго пилота.
Мы показали, что эффект загрязнения пилота может быть значительно уменьшен с помощью SP, обеспечивая производительность системы, близкую к случаю идеального CSI 9.0007
[goettsch3021impact]
, где каждый RU полностью знает векторы каналов связанных с ним UE.
Системная модель CF в наших предыдущих работах [goettsch3021impact] аналогична масштабируемой системе CF [Bjornson2020Scalable] Бьорнсона и Сангинетти, где децентрализованные единицы (DU) управляют конечным числом ориентированных на пользователя кластеров, и каждый кластер формируется на конечное количество RU. В этой системе CF мы не разрешаем каждому RU назначать один и тот же пилот-сигнал разным пользователям, что мы называем неперегруженным назначением пилот-сигнала (PA).
Однако SP расширяет возможности RU для оценки каналов UE второго пилота при перегрузке PA, когда RU могут назначать один и тот же пилот-сигнал нескольким UE.
Принятие перегруженного PA приводит к увеличению количества связанных RU на одно UE, что может увеличить коэффициент пространственного мультиплексирования на одно UE и улучшить спектральную эффективность (SE).
В этой системе CF мы не разрешаем каждому RU назначать один и тот же пилот-сигнал разным пользователям, что мы называем неперегруженным назначением пилот-сигнала (PA).
Однако SP расширяет возможности RU для оценки каналов UE второго пилота при перегрузке PA, когда RU могут назначать один и тот же пилот-сигнал нескольким UE.
Принятие перегруженного PA приводит к увеличению количества связанных RU на одно UE, что может увеличить коэффициент пространственного мультиплексирования на одно UE и улучшить спектральную эффективность (SE).
По этой причине в данной статье исследуются методы перегруженного PA и полуперегруженного PA для улучшения производительности SE.
Основное различие между перегруженным и полуперегруженным ПА заключается в процессе формирования ориентированных на пользователя кластеров.
Перегруженные ПА заранее формируют кластеры без учета загрязнения, а затем распределяют пилоты. С другой стороны, полуперегруженный PA имеет ограничение на этапе формирования кластера, заключающееся в том, что способ объединяет RU в кластеры UE второго пилота только тогда, когда подпространства UE второго пилота ортогональны. Кроме того, дизайн пилотного задания перегруженного PA имеет некоторые вариации, поэтому мы предлагаем конкретную реализацию перегруженного PA путем корректировки графической структуры, основанной на PA, изученной Zeng et al. [Zeng_WGF_2021] для нашей дезактивации на основе SP.
Кроме того, дизайн пилотного задания перегруженного PA имеет некоторые вариации, поэтому мы предлагаем конкретную реализацию перегруженного PA путем корректировки графической структуры, основанной на PA, изученной Zeng et al. [Zeng_WGF_2021] для нашей дезактивации на основе SP.
Вклад этой работы резюмируется следующим образом.
-
Мы предлагаем PA на основе графического фреймворка, скорректированную для SP, как конкретную реализацию перегруженного PA.
-
Исследуется полуперегруженный УМ и соответствующий метод формирования кластера для него. Преимуществом полуперегруженного PA является масштабируемая реализация по сравнению с перегруженным PA, поскольку перегруженный PA требует вычисления метрик в масштабе всей сети и обмена информацией.
-
Мы сравниваем суммарную производительность SE неперегруженного, полуперегруженного и перегруженного PA и выявляем область параметров, в которой система достигает наибольшей суммы SE.

II Модель системы
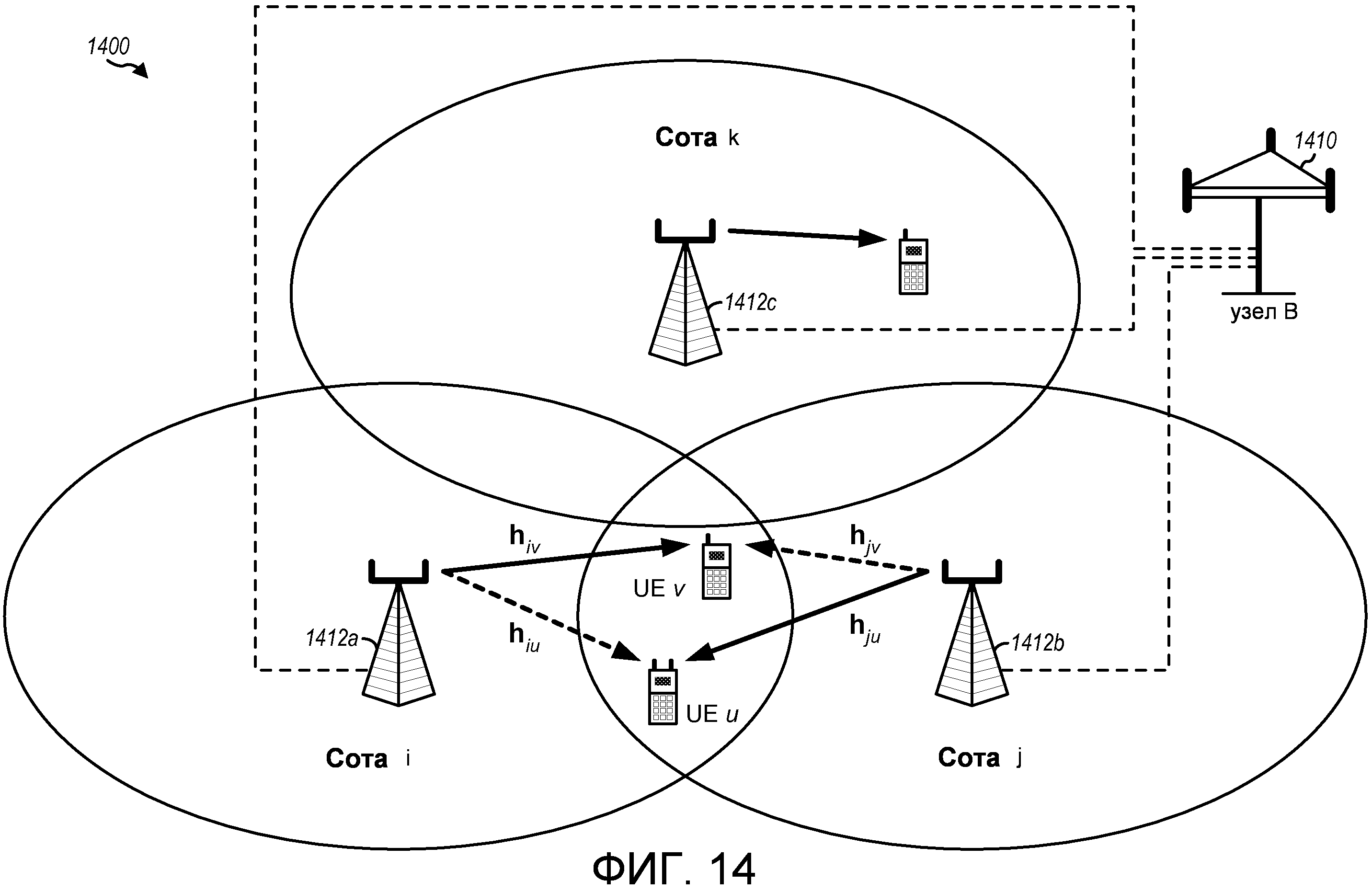
Мы рассматриваем систему CF-mMIMO с L RU, каждая с M антеннами, и K UE. И RU, и UE распределены в квадратной области на двумерной плоскости. Здесь мы предполагаем, что все кластеры уже сформированы. Набор Ck⊆[L]={1,2,…,L} обозначает кластер RU, обслуживающих UE k, а Uℓ⊆[K] обозначает набор UE, обслуживаемых RU ℓ. 1 1 1Набор целых чисел от 1 до n обозначается [n]. Ассоциации RU-UE описываются двудольным графом G, вершинами которого являются RU и UE соответственно. Набор ребер, учитывающих связанные пары RU-UE, обозначается E, т. е. G=G([L],[K],E). Мы также определяем U(Ck)=⋃ℓ∈CkUℓ как множество UE, обслуживаемых хотя бы одним RU в Ck.
При передаче по UL UE передают с одинаковой энергией на символ Es, и мы определяем системный параметр
| ОСШ=EsN0, | (1) |
где N0 обозначает спектральную плотность мощности шума. Коэффициент крупномасштабного замирания (LSFC) между RU ℓ и UE k обозначается βℓ,k и включает в себя потери на трассе, эффекты блокировки и затенения, соответственно.
При использовании изотропных антенн максимальное усиление формирования диаграммы направленности, усредненное по мелкомасштабным замираниям, равно M, поэтому максимальное SNR в приемнике RU ℓ от UE k равно βℓ,kMSNR.
Это SNR используется в качестве критерия формирования кластера.
Коэффициент крупномасштабного замирания (LSFC) между RU ℓ и UE k обозначается βℓ,k и включает в себя потери на трассе, эффекты блокировки и затенения, соответственно.
При использовании изотропных антенн максимальное усиление формирования диаграммы направленности, усредненное по мелкомасштабным замираниям, равно M, поэтому максимальное SNR в приемнике RU ℓ от UE k равно βℓ,kMSNR.
Это SNR используется в качестве критерия формирования кластера.
Мы рассматриваем модуляцию мультиплексирования с ортогональным частотным разделением каналов (OFDM) и каналы в соответствии со стандартной моделью блочного замирания [marzetta2010noncooperative, 9336188, измерений сигнала во времени -частотная область.
Описанные методы сформулированы для одного ресурсного блока (RB), поэтому индекс RB для простоты опущен.
Определим матрицу канала и ее элементы следующим образом. \bb H∈\bb CLM×K обозначает общую матрицу каналов между всеми антеннами LM RU и всеми антеннами K UE на заданном RB. где Sℓ,k⊆{0,…,M−1} и \boldmathνℓ,k — набор угловых опор согласно [adhikary2013joint] , а |Sℓ,k|×1 i.i.d. Гауссовский вектор с компонентами ∼CN(0,1) соответственно.
Множество Sℓ,k строится с помощью угловой опоры Θℓ,k=[θℓ,k−∆/2,θℓ,k+∆/2] с центром под углом θℓ,k линии прямой видимости между RU ℓ и UE k, с угловой распространение Δ. обозначает длинную унитарную матрицу, полученную путем выбора столбцов F, соответствующих набору индексов Sℓ,k.
Если два пользователя расположены в одном и том же широком угле ∆ по отношению к RU, векторы их каналов будут иметь идентичное подпространство и, следовательно, идентичную ковариационную матрицу.
Мы используем локальный линейный MMSE (LMMSE) с объединением на уровне кластера в качестве метода объединения UL.
Детали локального LMMSE описаны в [goettsch3021impact] 9.0006, где также обсуждаются другие методы, такие как установка нуля на уровне кластера и локальный MRC.
Поскольку локальная LMMSE с объединением на уровне кластера показала высокую производительность с масштабируемостью в [goettsch3021impact] , выбираем эту схему. Принятый вектор символов LM×1 на антеннах LM RU в UL определяется как , где sul∈\bb CK×1 — вектор информационных символов, передаваемых UE, а zul — i.i.d. вектор шума с компонентами ∼CN(0,1).
Определим полученный вектор символов RU ℓ как yulℓ∈\bb CLM×1, и
вектор нормы единицы приемника vk∈\bb CLM×1, образованный блоками M×1 vℓ,k:ℓ=1,…,L, такой, что vℓ,k=0, если (ℓ,k)∉E.
В локальном LMMSE с объединением на уровне кластера каждый RU ℓ вычисляет локальные векторы приема LMMSE vℓ,k для своих UE k∈Uℓ и объединяет принятые символы антенны с vHℓ,k, затем применяется объединение на уровне кластера с вектором коэффициентов объединения wk при каждый кластер Ck.
Приемный вектор LMMSE vℓ,k задается как где σ2ℓ обозначает дисперсию внешних помех [goettsch_SPbased_arxiv]
RU вычисляет локальный детектор rulℓ,k=vℓ,kyulℓ для каждого k∈Uℓ и отправляет символы в DU для объединения на уровне кластера.
Затем DU вычисляет комбинированный символ на уровне кластера как
Оптимизированный комбинированный вектор весов wk={wℓ,k:ℓ∈Ck}, который максимизирует SINR [goettsch3021impact] , определяется как где матрица Gk размерности |Ck|×(|U(Ck)|−1) содержит элементы gℓ,k,j в позиции, соответствующей RU ℓ и UE j (после подходящей перестановки индексов), если ( ℓ,j)∈E и ноль в других местах. Результирующее SINR для UL-символа UE k определяется как Мы используем оптимистическую эргодическую достижимую скорость Rulk для оценки производительности, которая определяется как , где ожидание относится к мелкомасштабному замиранию.
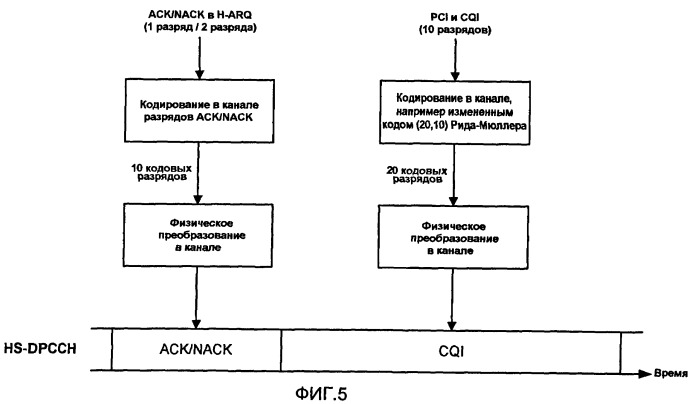
Затем спектральная эффективность UL (SE) рассчитывается как , где T — размер RB, а τp — размер пилот-сигнала. В качестве практического замечания отметим, что в 5GNR определены два типа пилот-сигналов UL: опорные сигналы демодуляции (DMRS) и опорные сигналы зондирования (SRS). Пилотный сигнал DMRS, полученный на RU ℓ, задается матрицей M×τp как где \boldmathϕti обозначает пилот-вектор DMRS размерности τp, используемый UE i в текущем RB, с полной энергией ∥\boldmathϕti∥2=τpSNR.
Для каждого UE k∈Uℓ, RU ℓ производит оценки канала согласования пилот-сигнала (PM) где ˜ztk,ℓ имеет i. Предположим, что информация о подпространстве Fℓ,k всех k∈Uℓ получена из периодических наблюдений SRS.
Мы рассматриваем схему дезактивации на основе SP, для которой прогнозируемая оценка канала задается ортогональной проекцией ˆhpmℓ,k на подпространство, натянутое на столбцы Fℓ,k, т. е. Второй член последнего уравнения соответствует загрязнению пилота после SP, которое представляет собой вектор Гаусса с нулевым средним значением, а его ковариационная матрица может быть записана как Когда Fℓ,k и Fℓ,i почти взаимно ортогональны, т. е. FHℓ,kFℓ.i≈0,
подпространственная проекция способна уменьшить эффект загрязнения пилота. Наша предыдущая работа [goettsch3021impact] применяет совместное назначение DMRS и формирование кластера в качестве неперегруженного PA.
С другой стороны, в большинстве родственных работ, направленных на борьбу с загрязнением стратегическими методами PA, неявно используется перегруженный PA, поскольку неперегруженный PA имеет меньшую свободу назначения.
В [Жадный] , жадный алгоритм PA был представлен как раннее исследование в литературе по CF.
Пилотная оптимизация с максимизацией пользовательской пропускной способности исследуется в [венгерский] , где задача максимизации решается с использованием итерационной схемы, основанной на венгерском алгоритме.
В [Chen_Structured_CF2021] был предложен PA группы пользователей, который назначает один и тот же пилотный сигнал UE, которые совместно используют меньше обслуживающих RU. Как упоминалось в гл. 1, SP может усиливать перегрузку PA, что приводит к улучшению SE.
В этом разделе представлены неперегруженные, полуперегруженные и перегруженные схемы PA с их правилами формирования кластеров. Пусть τp обозначает ортогональное измерение DMRS в системе. В соответствии с неперегруженным PA каждый RU назначает отдельные пилот-сигналы всем связанным с ним UE.
Когда UE k желает присоединиться к системе, оно выбирает свой ведущий RU ℓ(k) как тот, у которого самый большой LSFC из набора RU, посредством некоторого маякового сигнала или какого-либо другого механизма, основанного на местоположении.
На РУ ℓ(k) ставится условие наличия у РУ свободных пилотов DMRS
которые еще не были назначены RU обслуживаемым им UE.
Это формулируется как ℓ(k)=argmaxℓ∈Lf βℓ,k, где Lf обозначает набор RU со свободными пилот-сигналами DMRS. , где η>0 — подходящий порог, определяющий, насколько выше минимального уровня шума должен быть полезный сигнал при максимально возможном усилении формирования диаграммы направленности (равном M).
Если такой RU недоступен, то UE объявляется неисправным. RU выбирает пилот-сигнал с наименьшими помехами для UE k.
Пусть RU ℓ получает помехи на пилота как статистику,
пилот k-го UE tk равен , где Tℓ и Pi обозначают набор не назначенных пилот-сигналов в RU ℓ и набор UE с одинаковым индексом пилот-сигнала i соответственно. Набор Pi обновляется как Pi=Pi∪k после присвоения tk.
RU знает только результат суммирования ∑j∈Piβℓ,j как измеренную статистику. Предположим, что UE k находит своего лидера RU ℓ(k) и ему назначается пилот-сигнал DMRS с индексом tk∈[τp].
Затем получается кластер Ck путем сортировки RU, удовлетворяющих условию (19) и имея пилотный tk, все еще доступный в порядке убывания LSFC, и добавляя их в кластер до тех пор, пока не будет достигнут максимальный размер кластера Q, где Q — параметр конструкции, введенный для ограничения вычислительной сложности каждого кластерного процессора.
В результате для всех UE k, не находящихся в отключенном состоянии, 1≤|Ck|≤Q, и для всех RU ℓ∈Ck соответствующий LSFC удовлетворяет условию
(19). Кроме того, для всех RU ℓ имеем |Uℓ|≤τp. Мы вводим полуперегруженный подход PA, при котором каждый RU назначает один и тот же пилот-сигнал только UE с ортогональными подпространствами.
Предположим, что RU получают информацию о подпространстве UE в пределах своего охвата перед фазой выбора ведущего RU. где ζℓ,k,i обозначает количество загрязнений на индекс пилот-сигнала i на подпространстве канала между RU ℓ(k) и UE k, а множество Aℓ,k обозначает набор индексов пилот-сигнала с условием ζℓ ,к,i=0. После того, как все активные UE подключены к его ведущим RU, формируются ориентированные на пользователя кластеры.
При формировании кластера UE k кластер Ck получают путем сортировки RU, удовлетворяющих условиям (19) и (22), в порядке убывания LSFC и добавления их в кластер до тех пор, пока не будет достигнут максимальный размер кластера Q. В перегруженном PA кластеры, ориентированные на пользователя, формируются перед выделением пилот-сигнала. Здесь мы предлагаем стратегический PA, основанный на взвешенной графической структуре (WGF), основанной на PA, предложенной в [Zeng_WGF_2021] .
Сначала мы вводим эвристический PA на основе WGF [Zeng_WGF_2021] , где ортогональность подпространства не учитывается.
Схема WGF состоит из двух основных фаз: построение взвешенного графа загрязнения пилота и Max k-Cut PA.
Целью алгоритма Max k-Cut является нахождение оптимальных наборов UE второго пилота τp {V1,V2,…,Vτp}, чтобы потенциальное загрязнение было минимальным.
Однако реализация чистого алгоритма Max k-Cut имеет высокую сложность, поэтому [Zeng_WGF_2021] вводит эвристическое приближение Max k-Cut. Назначить τp произвольно выбранных UE τp подмножествам, по одному в каждом подмножестве. Временные подмножества задаются как V1={UE1},…,Vτp={UEτp}. Выберите одно оставшееся UEi, вычислите вес между каждым подмножеством и UEi как Wi,q=∑j∈Vqωi,j, где ωi,j обозначает вес между двумя UE. Назначить UE подмножеству с минимальным увеличенным весом как q*=argminqWi,q и обновить подмножество как Vq*=Vq*∪UEi. Итеративно повторяйте шаги 2) и 3), пока не будут назначены остальные UE. Во-первых, потенциальное загрязнение пилот-сигнала ωk,k’ между k-м и k’-м UE определяется как , где первый член в правой части соответствует количеству помех от k’-го UE к k-му кластеру Ck, а второй член соответствует помехе от k-го UE к Ck’.
Во-вторых, вес между подмножествами Vp и Vq определяется как Эта схема имеет тенденцию назначать UE с высокими потенциальными помехами в разные подмножества, таким образом, UE с потенциально сильными помехами могут быть назначены ортогональные пилот-сигналы. Для дальнейшего повышения устойчивости к загрязнениям мы модифицируем PA WGF таким образом, чтобы потенциальные помехи после процесса SP становились малыми, принимая во внимание информацию о подпространстве в метрике WGF.
Новую метрику можно вычислить, подставив операцию SP Fℓ,kFHℓ,k в (24) как Если подпространства UE k и k′ ортогональны, т. е. |Sℓ,k∩Sℓ,k′|=0, потенциальная помеха после SP равна 0 и ωSPk,k′ отражает ее.
Один момент, который следует учитывать при использовании (26), заключается в том, что эти выражения используют LSFC несвязанных пар RU-UE, т. е. βℓ,k′ для пар (ℓ,k′), таких что ℓ∉Ck′.
Поскольку RU ℓ не является частью кластера, обслуживающего пользователя k’, такие LSFC может быть сложно оценить, и они могут быть недоступны. С другой стороны, если RU ℓ не является частью Ck’, вероятно, βℓ,k’ очень мало (иначе RU был бы частью кластера).
Руководствуясь этим, мы вводим частичную метрику WGF на основе LSFC, в которой доступны только LSFC связанных пар UE-RU, т. е. Мы подставляем эту частичную метрику на основе LSFC в (25) для численного моделирования. Таблица I показывает основные характеристики параметров компьютерного моделирования. Мы рассматриваем квадратную зону покрытия A=2×2 км2 с топологией тора с использованием метода обертывания, чтобы избежать граничных эффектов.
LSFC даны в соответствии с моделью потери пути каньона городских микросот 3GPP из [3gpp38901, Таблица 7.4.1-1] , которая различает UE в LOS и NLOS.
Общее количество приемных антенн зафиксировано как LM=400.
Для каждого набора параметров было сгенерировано 40 независимых раскладок, и коэффициенты затухания в мелком масштабе варьировались 30 раз на каждой раскладке.
RU и UE распределяются случайным образом в каждой установке, а сумма SE определяется как сумма SEulk, а затем усредняется по отношению к другому макету. В таблице II показаны SE наибольшей суммы и параметры L, M, K, τp для этой установки. с вероятностью простоя по сравнению с На рис. 1 показан средний размер кластера с вероятностью простоя в зависимости от K, а на рис. 2 показана сумма SE по сравнению с K.
Обратите внимание, что сбой происходит в районе более 800 UE для полуперегруженных и неперегруженных PA.
Из рис. 1 видно, что размер кластера с перегруженным PA становится Q≥9 для большинства UE.
Исходя из этого наблюдения, если нет ограничений на формирование кластера, каждое UE может найти RU по Q с достаточным усилением в этом распределении и мощностью передачи, тогда Q RU присоединяются к кластеру в порядке усиления. Затем давайте сосредоточимся на рис. 2, где идеальные линии CSI указывают на отсутствие ошибки оценки канала.
Коэффициент деградации SE можно разделить на две части: ошибка оценки канала из-за загрязнения и предел пространственного мультиплексирования из-за увеличения числа UE.
Тот факт, что сумма SE насыщается в идеальном случае CSI, указывает на последний фактор. Для неперегруженного PA оценка канала PM ухудшается по сравнению с идеальной CSI даже для самого маленького K. С другой стороны, SP достигает той же суммы SE, что и в идеальном случае, что означает, что SP эффективно устраняет загрязнение. Перегруженный PA на основе WGF имеет наибольшую суммарную SE при определенной плотности UE (K≤400), где SE для UE (сумма SE/K) становится лучшим, но остается проблема реализации.
к немасштабируемому назначению PA. В этой статье исследованы полуперегруженные и перегруженные PA с методами формирования кластера, которые превосходят неперегруженные PA в системах CF-mMIMO.
Перегруженный PA на основе WGF достиг наибольшей суммарной SE в области определенной плотности UE (K≤400), но сложен для практической реализации из-за немасштабируемого расчета метрик и обмена информацией.
Полуперегруженный PA, который перегружает UE только ортогональными подпространствами, достигает наибольшей суммы SE в районе K≥600.
Кроме того, он также обеспечивает конкурентоспособную сумму SE при K ≥ 400 с более расслабленной процедурой PA.
Модели самолетов, радиоуправляемые самолеты, радиоуправляемые самолеты,
DE —
ЕН —
ЕС —
ФР —
ГР —
ИТ —
НЛ —
PL —
ПТ —
РО —
RU —
SE | Альтро Каррелло (0 Nuovi articoli)
€ 2499,00
| Альтро
Нет на складе, готов к предварительному заказу Pilot RC 1/8 F16 1,81 м (71,3″), цветовая схема 02, включая втягивающиеся элементы. 1,8 м 1/8 Жиклер с нормальной выхлопной трубой, UAT, топливный бак, топливная точка, вентиляция топливного бака, удлинительный провод сервопривода, крепеж. Предварительно установленная дверца. С убранной шестерней. Нет набора кабины.
*Обратите внимание, что серийная версия поставляется с прозрачным навесом. Комбинированное шасси : Турбин: 60-100N Серво.45] , так что они являются случайными, но постоянными по когерентности блоками T
 Далее, hk∈\bb CLM×1 обозначает k-й столбец \bb H∈\bb CLM×K.
Кроме того, hℓ,j∈\bb CM×1 обозначает вектор канала между RU ℓ и UE k.
Наконец, \bb H(Ck)∈\bb CLM×K обозначает частичную кластерно-центрическую матрицу для кластера Ck, чьи блоки M×1 пар RU-UE (ℓ,j)∈E равны hℓ,j, и равен 0 (тождественно нулевой вектор) в противном случае.
Затем мы предполагаем, что отдельные каналы между RU и UE следуют модели локального рассеяния с одним кольцом 9.0005 [adhikary2013joint] ,
тогда hℓ,j определяется выражением
Далее, hk∈\bb CLM×1 обозначает k-й столбец \bb H∈\bb CLM×K.
Кроме того, hℓ,j∈\bb CM×1 обозначает вектор канала между RU ℓ и UE k.
Наконец, \bb H(Ck)∈\bb CLM×K обозначает частичную кластерно-центрическую матрицу для кластера Ck, чьи блоки M×1 пар RU-UE (ℓ,j)∈E равны hℓ,j, и равен 0 (тождественно нулевой вектор) в противном случае.
Затем мы предполагаем, что отдельные каналы между RU и UE следуют модели локального рассеяния с одним кольцом 9.0005 [adhikary2013joint] ,
тогда hℓ,j определяется выражением
чℓ,k=√βℓ,kM|Sℓ,k|Fℓ,k\boldmathνℓ,k,
(2)
 Обозначим через F унитарную матрицу ДПФ размера M×M с (m,n)-элементами fm,n=e−j2πMmn√M и, используя обозначение, подобное Matlab, Fℓ,kΔ=F(:,Sℓ,k)
Обозначим через F унитарную матрицу ДПФ размера M×M с (m,n)-элементами fm,n=e−j2πMmn√M и, используя обозначение, подобное Matlab, Fℓ,kΔ=F(:,Sℓ,k)
Ii-a Передача данных UL

йул=√SNR\bb Хсул+зул,
(3)
vℓ,k=⎛⎝σ2ℓI+SNR∑j∈Uℓhℓ,jhHℓ,j⎞⎠−1hℓ,k,
(4)
σ2ℓ=1+SNR∑j≠Uℓβℓ,j.

(5)
rulk=∑ℓ∈Ckwℓ,krulℓ,k.
(6)
нед
=
\boldmathΓ−1kak ∈\bb C|Ck|×1,
(7)
ак
=
{гℓ,к,к:ℓ∈Ck},
(8)
гℓ,к,к
=
vHℓ,khℓ,j,
(9)
\boldmathΓk
=
Dk+SNRGkGHk∈%
\bb С|Ск|×|Ск|,
(10)
Дк
=
диаг{σ2ℓ∥vℓ,k∥2:ℓ∈Ck},
(11)
 Общий приемный вектор vk формируется путем суммирования векторов wℓ,kvℓ,k, т. е. vk=[w1,kvT1,k,w2,kvT2,k,…,wL,kvTL,k]T.
Общий приемный вектор vk формируется путем суммирования векторов wℓ,kvℓ,k, т. е. vk=[w1,kvT1,k,w2,kvT2,k,…,wL,kvTL,k]T.
Ii-B UL SINR и SE
SINRulk
=
|vHkhk|2SNR−1+∑j≠k|vHkhj|2.
(12)
Rulk=\bb E[log(1+SINRulk)],
(13)
SEulk=(1−τp/T)Rulk,
(14)
Оценка канала Ii-C UL
 В этой работе мы предполагаем, что мгновенные коэффициенты канала оцениваются по пилот-сигналам DMRS, а информация о подпространстве оценивается с использованием SRS. 2 2 2Метод оценки информации о подпространстве с использованием SRS обсуждается в [goettsch_SPbased_arxiv] .
В этой работе мы предполагаем, что мгновенные коэффициенты канала оцениваются по пилот-сигналам DMRS, а информация о подпространстве оценивается с использованием SRS. 2 2 2Метод оценки информации о подпространстве с использованием SRS обсуждается в [goettsch_SPbased_arxiv] .
YDMRSℓ=K∑i=1hℓ,i\boldmathϕHti+ZDMRSℓ,
(15)
л/минℓ,k
=
1τpSNRYDMRSℓ%
\boldmathϕtk
(16)
=
чℓ,k+∑i:ti=tki≠khℓ,i+˜ztk,ℓ,
 i.d. с компонентами CN(0,1τpSNR). Обратите внимание, что присутствие UE i≠k, использующих один и тот же пилот-сигнал DMRS tk, приводит к загрязнению пилот-сигнала.
i.d. с компонентами CN(0,1τpSNR). Обратите внимание, что присутствие UE i≠k, использующих один и тот же пилот-сигнал DMRS tk, приводит к загрязнению пилот-сигнала.
ˆhspℓ,k
=Fℓ,kFHℓ,kˆhpmℓ,k
=hℓ,k+∑i:ti=tki≠kFℓ,kFHℓ,khℓ,i+Fℓ,kFHℓ,k˜ztk,ℓ.
(17)
\boldmathΣcoℓ,k=∑i:ti=tki≠kβℓ,iM|Sℓ,i|Fℓ,kFHℓ,kFℓ,iFHℓ,iFℓ,kFHℓ,k.

(18)
III Пилотное назначение и формирование кластера
 Кроме того, схемы назначения пилотов на основе графической основы исследуются в [Hmida_Graph_2020, Zeng_WGF_2021] .
Кроме того, схемы назначения пилотов на основе графической основы исследуются в [Hmida_Graph_2020, Zeng_WGF_2021] .
III-a Назначение пилота без перегрузки
 Выбор лидера RU также должен удовлетворять условию
Выбор лидера RU также должен удовлетворять условию
βℓ,k≥ηMSNR,
(19)
тк
=
argmini∈Tℓ∑j∈Piβℓ,j,
(20)

III-B Полуперегруженное назначение пилот-сигнала на основе ортогональности подпространства
 На этапе выбора ведущего RU UE сначала пытаются выбрать RU с наибольшим LSFC как ℓ(k) .
Если RU ℓ(k) имеет свободные пилот-сигналы, RU выбирает пилот-сигнал на основе ур. (20).
С другой стороны, когда у RU нет свободного пилот-сигнала, RU пытается найти пилот-сигнал, который ортогонален другим обслуживаемым UE в подпространстве.
Выбор пилот-сигнала для UE k формулируется с использованием набора UE второго пилота Pi (i∈[τp]) как
На этапе выбора ведущего RU UE сначала пытаются выбрать RU с наибольшим LSFC как ℓ(k) .
Если RU ℓ(k) имеет свободные пилот-сигналы, RU выбирает пилот-сигнал на основе ур. (20).
С другой стороны, когда у RU нет свободного пилот-сигнала, RU пытается найти пилот-сигнал, который ортогонален другим обслуживаемым UE в подпространстве.
Выбор пилот-сигнала для UE k формулируется с использованием набора UE второго пилота Pi (i∈[τp]) как
ζℓ,к,я
≜
∑j∈(Uℓ∩Pi∖k)||Fℓ,kFHℓ,kFℓ,j||Fβℓ,j,
(21)
Аℓ,к
≜
{i|i∈[τp],ζℓ,k,i=0},
(22)
тк
=
argmini∈Aℓ,k∑j∈Piβℓ,j,
(23)
 Обратите внимание, что это условие слишком просто для практического использования, поскольку в этой статье используется простая модель канала.
Порог ζℓ,k,i следует ослабить для более практичной модели канала.
Третье уравнение (23) выбирает пилот-сигнал с наименьшими помехами, при этом учитываются помехи от необслуживаемых UE.
Если RU ℓ не может удовлетворить вышеуказанным условиям, UE обращается к следующему кандидату RU, или UE объявляются в состоянии сбоя, если нет доступных RU.
Обратите внимание, что это условие слишком просто для практического использования, поскольку в этой статье используется простая модель канала.
Порог ζℓ,k,i следует ослабить для более практичной модели канала.
Третье уравнение (23) выбирает пилот-сигнал с наименьшими помехами, при этом учитываются помехи от необслуживаемых UE.
Если RU ℓ не может удовлетворить вышеуказанным условиям, UE обращается к следующему кандидату RU, или UE объявляются в состоянии сбоя, если нет доступных RU.
III-C Перегруженное назначение пилота
 Каждое UE k выбирает до Q RU с условием βℓ,k>ηMSNR.
Затем пилотные сигналы назначаются каждому UE посредством случайного назначения пилотных сигналов (RPA) или стратегического PA.
Обратите внимание, что следующий стратегический PA реализуется сетевым контроллером, таким как центральный блок (CU), в то время как RPA может применяться локально.
Каждое UE k выбирает до Q RU с условием βℓ,k>ηMSNR.
Затем пилотные сигналы назначаются каждому UE посредством случайного назначения пилотных сигналов (RPA) или стратегического PA.
Обратите внимание, что следующий стратегический PA реализуется сетевым контроллером, таким как центральный блок (CU), в то время как RPA может применяться локально.  Эвристический подход состоит из следующих шагов, где каждая переменная объясняется позже.
Эвристический подход состоит из следующих шагов, где каждая переменная объясняется позже.
Wp,q=∑i∈Vp,j∈Vqωi,j.
(25)
ωСПк,к’
=
∣∣
∣∣∑ℓ∈Ck||Fℓ,kFHℓ,kFℓ,k′||Fβℓ,k′/∑ℓ∈Ckβℓ,k∣∣
∣∣2
(26)
+
∣∣
∣∣∑ℓ∈Ck′||Fℓ,k′FHℓ,k′Fℓ,k||Fβℓ,k/∑ℓ∈Ck′βℓ,k′∣∣
∣∣2
=
∣∣
∣∣∑ℓ∈Ck|Sℓ,k∩Sℓ,k′||Sℓ,k|βℓ,k′/∑ℓ∈Ckβℓ,k∣∣
∣∣2
+
∣∣
∣∣∑ℓ∈Ck′|Sℓ,k′∩Sℓ,k||Sℓ,k′|βℓ,k/∑ℓ∈Ck′βℓ,k′∣∣
∣∣2.
¯¯¯ωSPk,k′
=
∣∣
∣∣∑ℓ∈Ck∩Ck′|Sℓ,k∩Sℓ,k′||Sℓ,k|βℓ,k′/∑ℓ∈Ckβℓ,k∣∣
∣∣2
(27)
+
∣∣
∣∣∑ℓ∈Ck′∩Ck|Sℓ,k∩Sℓ,k′||Sℓ,k|βℓ,k/∑ℓ∈Ck′βℓ,k′∣∣
∣∣2.

IV Результаты моделирования
 Во-первых, мы подтвердили, что τp=30 превосходит результат τp≤20 для перегруженного и полуперегруженного PA даже с учетом накладных расходов в уравнении. (14), а τp=20 – лучшее для неперегруженного УМ.
При сравнении каждого метода оценки PA и канала полуперегруженный PA с SP достигает наибольшей суммы SE.
Затем мы сосредоточимся на настройке τp=30,L=25,M=16, чтобы проанализировать поведение вокруг наибольшей суммы SE.
Во-первых, мы подтвердили, что τp=30 превосходит результат τp≤20 для перегруженного и полуперегруженного PA даже с учетом накладных расходов в уравнении. (14), а τp=20 – лучшее для неперегруженного УМ.
При сравнении каждого метода оценки PA и канала полуперегруженный PA с SP достигает наибольшей суммы SE.
Затем мы сосредоточимся на настройке τp=30,L=25,M=16, чтобы проанализировать поведение вокруг наибольшей суммы SE.  Размер кластера неперегруженной схемы УМ значительно уменьшается за счет увеличения K, в то время как размер кластера полуперегруженной схемы УМ уменьшается более плавно.
Если оценка канала не имеет ошибок, UE с более крупными кластерами может получить более высокую SE за счет получения большего пространственного разнесения.
Таким образом, формирование перегруженных и полуперегруженных кластеров может превзойти неперегруженные с точки зрения SE.
Размер кластера неперегруженной схемы УМ значительно уменьшается за счет увеличения K, в то время как размер кластера полуперегруженной схемы УМ уменьшается более плавно.
Если оценка канала не имеет ошибок, UE с более крупными кластерами может получить более высокую SE за счет получения большего пространственного разнесения.
Таким образом, формирование перегруженных и полуперегруженных кластеров может превзойти неперегруженные с точки зрения SE.  Для перегруженного PA производительность RPA значительно ухудшается по сравнению с ее верхней границей (идеальная CSI) по мере увеличения K, так как произвольно назначенные пилот-сигналы генерируют множество UE второго пилота в одном и том же подпространстве.
PA на основе WGF также ухудшается по сравнению с идеальным случаем, однако он достигает наивысшей суммы SE при K≤400 среди всех методов PA.
Наконец, для полуперегруженного УМ он немного превосходит перегруженный УМ при К≥600 и достигает наибольшей суммы SE при К=600.
Кроме того, разрыв между SP и идеальным CSI остается очень небольшим, поэтому полуперегруженный PA работает, как мы и ожидали.
В области K≥800 суммарный SE выходит на насыщение и немного ухудшается, что можно рассматривать как эффект повышенного простоя, как видно на рис. 1.9.0007
Для перегруженного PA производительность RPA значительно ухудшается по сравнению с ее верхней границей (идеальная CSI) по мере увеличения K, так как произвольно назначенные пилот-сигналы генерируют множество UE второго пилота в одном и том же подпространстве.
PA на основе WGF также ухудшается по сравнению с идеальным случаем, однако он достигает наивысшей суммы SE при K≤400 среди всех методов PA.
Наконец, для полуперегруженного УМ он немного превосходит перегруженный УМ при К≥600 и достигает наибольшей суммы SE при К=600.
Кроме того, разрыв между SP и идеальным CSI остается очень небольшим, поэтому полуперегруженный PA работает, как мы и ожидали.
В области K≥800 суммарный SE выходит на насыщение и немного ухудшается, что можно рассматривать как эффект повышенного простоя, как видно на рис. 1.9.0007
 Таким образом, для практического развертывания желательна приблизительная реализация масштабируемости.
С другой стороны, полуперегруженный PA достигает конкурентоспособной суммы SE при K = 400 с расслабленной процедурой PA.
Таким образом, для практического развертывания желательна приблизительная реализация масштабируемости.
С другой стороны, полуперегруженный PA достигает конкурентоспособной суммы SE при K = 400 с расслабленной процедурой PA.
V Выводы
Ссылки
Pilot rc 1/8 F16 1,81 м (71,3″) цветовая схема 02 —
Pilot rc 1/8 F16 1,81 м (71,3″) цветовая гамма 02 —
Pilot rc 1/8 F16 1,81 м (71,3″), цветовая гамма 02
ТЕХНИЧЕСКИЕ ХАРАКТЕРИСТИКИ:
Модель:
1/8 F16
Размах крыла:
52,9 дюйма (1344 мм)
Длина:
71,3″ (1,81 мм) — плюс трубка Пито
Вес:
17,8 фунта (7,85 кг)
ХАРАКТЕРИСТИКИ:
ОБОРУДОВАНИЕ В КОМПЛЕКТЕ:
Комплект Pilot-RC 1/8 F16 с установленными дверцами редуктора
Пилот-RC Electric Hear и тормоза Set
не включает в себя набор векторной тяги или кабину
Требуется Оборудование:
Похожие записи
