Как отрегулировать обороты асинхронного двигателя. Какие существуют способы регулировки частоты вращения. Схемы и устройства для изменения скорости вращения асинхронных электродвигателей. Преимущества и недостатки различных методов регулировки.
Что такое асинхронный двигатель и принцип его работы
Асинхронный двигатель — это электрическая машина переменного тока, в которой частота вращения ротора отличается от частоты вращения магнитного поля статора. Основными элементами конструкции асинхронного двигателя являются:
- Статор — неподвижная часть с обмотками
- Ротор — вращающаяся часть (короткозамкнутый или фазный)
- Подшипниковые щиты
- Вентилятор охлаждения
- Клеммная коробка
Принцип работы асинхронного двигателя основан на взаимодействии вращающегося магнитного поля статора и токов, индуцированных этим полем в обмотке ротора. При подключении обмоток статора к трехфазной сети возникает вращающееся магнитное поле. Оно пересекает проводники обмотки ротора и индуцирует в них ЭДС. Под действием ЭДС в замкнутой обмотке ротора возникают токи. Взаимодействие токов ротора с магнитным полем статора создает вращающий момент, приводящий ротор во вращение.

Зачем нужна регулировка оборотов асинхронного двигателя
Регулировка частоты вращения асинхронных двигателей необходима во многих технологических процессах и применениях:
- Для изменения производительности механизмов (насосов, вентиляторов, компрессоров)
- Для обеспечения требуемых режимов работы производственного оборудования
- Для плавного пуска и торможения двигателей
- Для экономии электроэнергии при неполной нагрузке
- Для синхронизации скорости нескольких приводов
Возможность регулирования оборотов позволяет оптимизировать работу электропривода под конкретные условия и требования технологического процесса.
Основные способы регулировки частоты вращения асинхронных двигателей
Существует несколько основных методов изменения скорости вращения асинхронных электродвигателей:
1. Частотное регулирование
Это наиболее современный и эффективный способ. Частота вращения асинхронного двигателя прямо пропорциональна частоте питающего напряжения. Изменяя частоту с помощью преобразователя частоты, можно плавно регулировать обороты в широком диапазоне.
2. Изменение числа пар полюсов
Частота вращения обратно пропорциональна числу пар полюсов. Переключая обмотки статора, можно ступенчато менять число пар полюсов и соответственно скорость вращения.
3. Реостатное регулирование
Применяется для двигателей с фазным ротором. В цепь ротора вводится дополнительное сопротивление, что приводит к увеличению скольжения и снижению оборотов.
4. Изменение напряжения питания
При снижении напряжения уменьшается вращающий момент и частота вращения. Однако этот способ имеет ограниченный диапазон регулирования.
5. Каскадные схемы
Частотное регулирование оборотов асинхронного двигателя
Частотное регулирование является наиболее эффективным и распространенным способом изменения скорости вращения асинхронных электродвигателей. Основные преимущества этого метода:
- Плавное регулирование в широком диапазоне
- Высокая точность поддержания скорости
- Экономия электроэнергии
- Плавный пуск и торможение
- Защита двигателя
Для частотного регулирования применяются специальные устройства — преобразователи частоты. Они преобразуют напряжение постоянной частоты в напряжение переменной частоты и амплитуды.

Основные элементы преобразователя частоты:
- Выпрямитель
- Промежуточное звено постоянного тока
- Инвертор
- Система управления
Изменяя частоту и напряжение на выходе инвертора, преобразователь управляет скоростью вращения подключенного асинхронного двигателя.
Схемы регуляторов оборотов для асинхронных двигателей
Рассмотрим несколько схем простых регуляторов оборотов, которые можно изготовить своими руками:
Симисторный регулятор
Простейшая схема на основе симистора позволяет плавно изменять напряжение питания однофазного асинхронного двигателя:
«`text 220V AC | R1 | |-\/\/\/-| | | | D1 | |——|<|----+ | C1| | ||-| | R2 | | |-\/\/\/\/-+ | | | | VS1 | |----|----| | | | | | | | | | | M1 | | | | | | |----+----+---+ | GND R1 - 100k потенциометр R2 - 10k резистор C1 - 100nF конденсатор D1 - диод 1N4007 VS1 - симистор BT136 M1 - асинхронный двигатель ```Вращая потенциометр R1, можно плавно изменять угол открытия симистора и соответственно напряжение на двигателе.
ШИМ-регулятор на микроконтроллере
Более сложная, но функциональная схема на основе микроконтроллера Arduino:
«`c #define PWM_PIN 9 #define POT_PIN A0 void setup() { pinMode(PWM_PIN, OUTPUT); } void loop() { int potValue = analogRead(POT_PIN); int pwmValue = map(potValue, 0, 1023, 0, 255); analogWrite(PWM_PIN, pwmValue); } «`Микроконтроллер считывает значение с потенциометра и формирует ШИМ-сигнал для управления мощным транзистором или симистором.
Особенности регулировки оборотов трехфазных асинхронных двигателей
Регулировка скорости вращения трехфазных асинхронных двигателей имеет некоторые особенности:
- Необходимо обеспечить симметричное регулирование по всем трем фазам
- Требуются более мощные регуляторы из-за больших мощностей двигателей
- Желательно применение специализированных трехфазных преобразователей частоты
- Возможно использование схем с переключением числа пар полюсов
Для трехфазных двигателей наиболее оптимальным является применение промышленных преобразователей частоты. Они обеспечивают качественное управление во всем диапазоне скоростей.
Преимущества и недостатки различных способов регулировки
Сравним основные методы регулирования скорости асинхронных двигателей:
| Метод | Преимущества | Недостатки |
|---|---|---|
| Частотное регулирование |
— Широкий диапазон — Плавность — Экономичность |
— Высокая стоимость — Сложность |
| Изменение числа пар полюсов |
— Простота — Надежность |
— Ступенчатое регулирование — Ограниченный диапазон |
| Реостатное регулирование |
— Простота — Низкая стоимость |
— Энергопотери — Только для двигателей с фазным ротором |
| Изменение напряжения |
— Простота реализации — Низкая стоимость |
— Малый диапазон — Снижение момента |
Выбор оптимального способа регулирования зависит от конкретных требований, типа двигателя и условий применения.
Рекомендации по выбору и настройке регулятора оборотов
При выборе регулятора оборотов для асинхронного двигателя следует учитывать:
- Тип двигателя (однофазный/трехфазный, мощность)
- Требуемый диапазон регулирования
- Необходимую точность поддержания скорости
- Условия эксплуатации (температура, влажность и т.д.)
- Дополнительные функции (плавный пуск, защита и т.п.)
Для большинства применений оптимальным выбором будет частотный преобразователь. При его настройке важно правильно задать параметры двигателя и режимы работы. Рекомендуется выполнить автонастройку преобразователя под конкретный двигатель.
Заключение
Регулировка оборотов асинхронных двигателей позволяет оптимизировать работу электроприводов в различных применениях. Современные методы, особенно частотное регулирование, обеспечивают широкие возможности управления при высокой энергоэффективности. Правильный выбор и настройка регулятора оборотов позволяет значительно повысить эффективность работы оборудования с асинхронными двигателями.

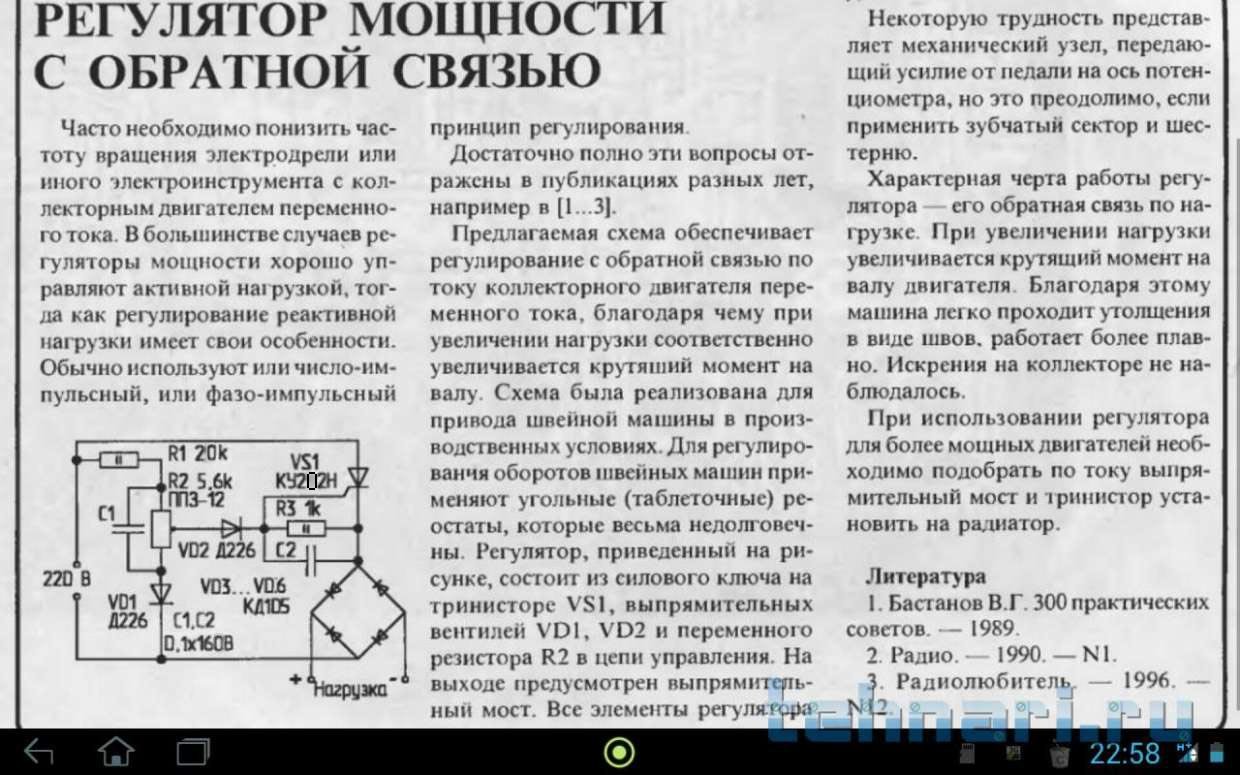
Регулировка оборотов асинхронного двигателя своими руками (схема, видео)
Достаточно часто режим работы вспомогательного механизированного оборудования требует понижения штатных частот вращения. Добиться такого эффекта позволяет регулировка оборотов асинхронного двигателя. Как это сделать своими руками (расчет и сборку), используя стандартные схемы управления или самодельные устройства, попробуем разобраться далее.
Что такое асинхронный двигатель?
Электродвигатели переменного тока нашли довольно широкое применение в различных сферах нашей жизнедеятельности, в подъемно транспортном, обрабатывающем, измерительном оборудовании. Они используются для превращения электрической энергии, которая поступает от сети, в механическую энергию вращающегося вала. Чаще всего используются именно асинхронные преобразователи переменного тока. В них частота вращения ротора и статора отличаются. Между этими активными элементами обеспечивается конструктивный воздушный зазор.
И статор, и ротор имеют жесткий сердечник из электротехнической стали (наборного типа, из пластин), выступающий в роли магнитопровода, а также обмотку, которая укладывается в конструктивные пазы сердечника. Именно способ организации или укладки обмотки ротора является ключевым критерием классификации этих машин.
Двигатели с короткозамкнутым ротором (АДКР)
Здесь используется обмотка в виде алюминиевых, медных или латунных стержней, которые вставляются в пазы сердечника и с обеих сторон замыкаются дисками (кольцами). Тип соединения этих элементов зависит от мощности двигателя: для малых значений используют метод совместной отливки дисков и стержней, а для больших – раздельное изготовление с последующей сваркой между собой. Обмотка статора подключается с использованием схем «треугольника» или «звезды».
Двигатели с фазным ротором
К сети подключается трехфазная обмотка ротора, посредством контактных колец на основном валу и щеток. За основу принимается схема «звезда». На рисунке внизу представлена типичная конструкция такого двигателя.
За основу принимается схема «звезда». На рисунке внизу представлена типичная конструкция такого двигателя.
Принцип работы и число оборотов асинхронных двигателей
Одной из ключевых характеристик любого АДКР является частота вращения, расчет которой можно вести по следующей зависимости:
n = 60f / p, об/мин
где f – частота сетевого напряжения, Гц, р – число полюсных пар статора.
Все технические характеристики указываются на металлической табличке, закрепленной на корпусе. Но если она отсутствует по какой-то причине, то определить число оборотов нужно вручную по косвенным показателям. Как правило, используется три основных метода:
Но если она отсутствует по какой-то причине, то определить число оборотов нужно вручную по косвенным показателям. Как правило, используется три основных метода:
- Расчет количества катушек. Полученное значение сопоставляется с действующими нормами для напряжения 220 и 380В (см. табл. ниже),
- Расчет оборотов с учетом диаметрального шага обмотки. Для определения используется формула вида:
2p = Z1 / y,
где 2p – число полюсов, Z1 – количество пазов в сердечнике статора, y – собственно, шаг укладки обмотки.
Стандартные значения оборотов:
- Расчет числа полюсов по сердечнику статора. Используются математические формулы, где учитываются геометрические параметры изделия:
2p = 0,35Z1b / h или 2p = 0,5Di / h,
где 2p – число полюсов, Z1 – количество пазов в статоре, b – ширина зубца, см, h – высота спинки, см, Di – внутренний диаметр, образованный зубцами сердечника, см.
После этого по полученным данным и магнитной индукции нужно определить количество витков, которое сверяется с паспортными данными двигателей.
Способы изменения оборотов двигателя
Регулировка оборотов любого трехфазного электродвигателя, используемого в подъемно-транспортной технике и оборудовании, позволяет добиться требуемых режимов работы точно и плавно, что далеко не всегда возможно, например, за счет механических редукторов. На практике используется семь основных методов коррекции скорости вращения, которые делятся на два ключевых направления:
- Изменение скорости магнитного поля в статоре. Достигается за счет частотного регулирования, переключения числа полюсных пар или коррекции напряжения. Следует добавить, что эти методы применимы для электродвигателей с короткозамкнутым ротором,
- Изменение величины скольжения. Этот параметр можно откорректировать за счет питающего напряжения, подключения дополнительного сопротивления в электрическую цепь ротора, применения вентильного каскада или двойного питания. Используется для моделей с фазным ротором.
Наиболее востребованными методами являются регулирование напряжения и частоты (за счет применения преобразователей), а также изменение количества полюсных пар (реализуется путем организации дополнительной обмотки с возможностью переключения).
Типичные схемы регуляторов оборотов
На рынке сегодня есть широкий выбор регуляторов и частотных преобразователей для асинхронных двигателей. Тем не менее, для бытовых нужд подъемного или обрабатывающего оборудования вполне можно сделать расчет и сборку на микросхеме самодельного прибора на базе тиристоров или мощных транзисторов.
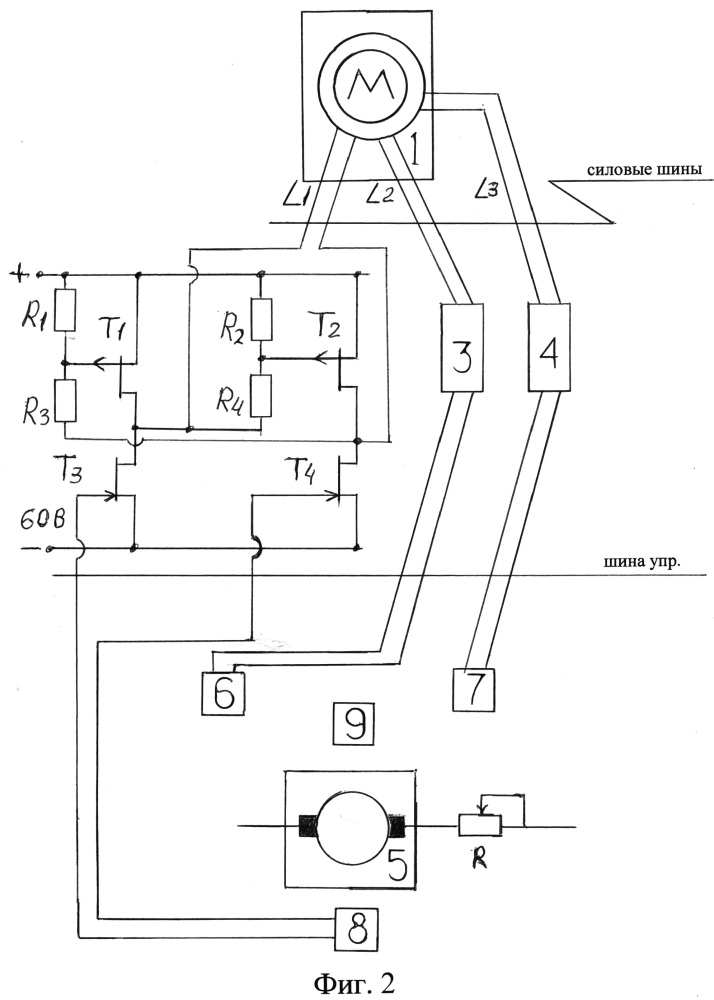
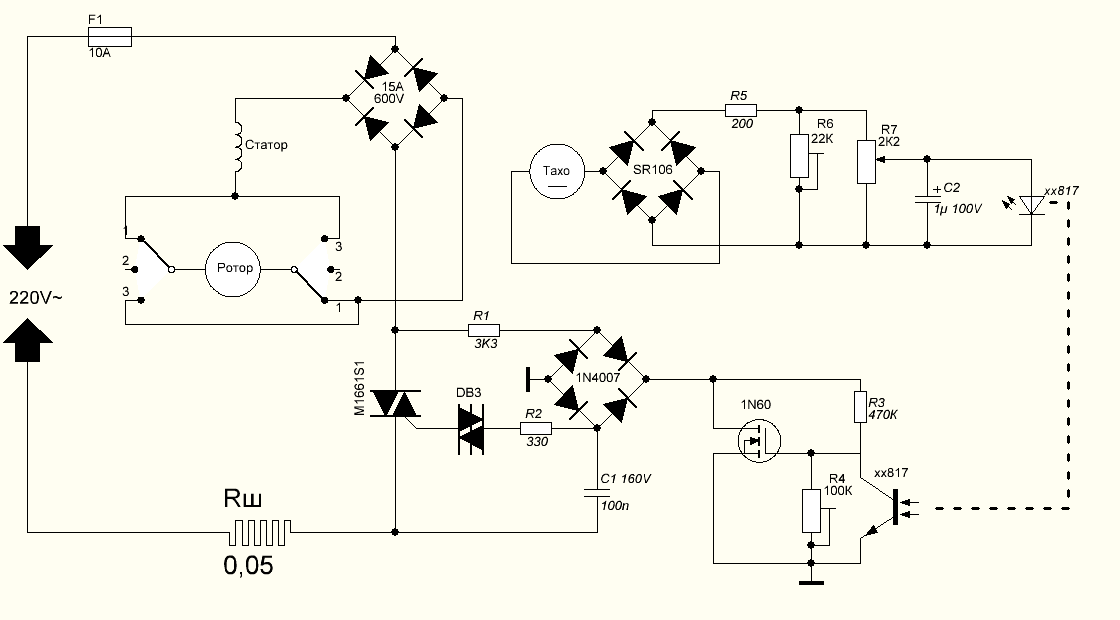
Ниже представлен пример схемы достаточно мощного регулятора для асинхронного двигателя. За счет чего можно добиться плавного контроля параметров его работы, снижения энергопотребления до 50%, расходов на техническое обслуживание.
Данная схема является сложной. Для бытовых нужд ее можно значительно упростить, используя в качестве рабочего элемента симистор, например, ВТ138-600. В этом случае схема будет выглядеть следующим образом:
Обороты электродвигателя будут регулироваться за счет потенциометра, который определяет фазу входного импульса, открывающего симистор.
Как можно судить из информации, представленной выше, от оборотов асинхронного двигателя зависят не только параметры его работы, но и эффективность функционирования питаемого подъемного или обрабатывающего оборудования. В торговой сети сегодня можно приобрести самые разнообразные регуляторы, но также можно совершить расчет и собрать эффективное устройство своими руками.
| Принцип действия трехфазного асинхронного двигателя |
| Пуск звезда-треугольник трехфазного электродвигателя | |||||
| |||||
 Рассмотрим эту схему подробнее.
Рассмотрим эту схему подробнее.
| РЕГУЛИРОВКА ОБОРОТОВ ЭЛЕКТРОДВИГАТЕЛЕЙ | |||||
| |||||
| Регулятор оборотов электродрели своими руками | |||||
| |||||
 Транзисторные регуляторы имеют, как правило, низкий КПД, что ведет к увеличению размеров и массы трансформатора питания и теплоотвода. В этом отношении более выгодны тринисторные устройства, поскольку потери энергии в тринисторе, работающем в ключевом режиме, незначительны. По этой причине отпадает необходимость в отводе от него тепла.
Транзисторные регуляторы имеют, как правило, низкий КПД, что ведет к увеличению размеров и массы трансформатора питания и теплоотвода. В этом отношении более выгодны тринисторные устройства, поскольку потери энергии в тринисторе, работающем в ключевом режиме, незначительны. По этой причине отпадает необходимость в отводе от него тепла.
| Ремонт и проверка работоспособности коллекторных электродвигателей стиральных машин. | |||||
| |||||
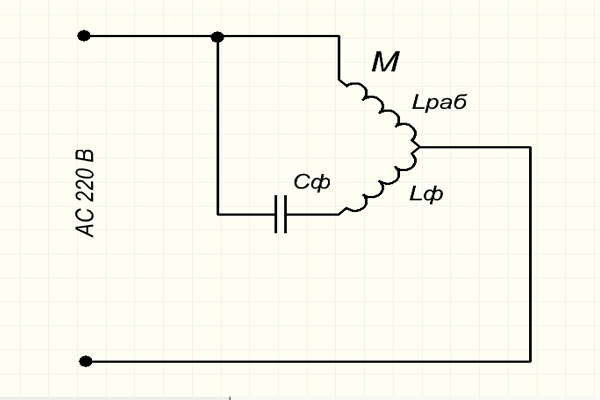
 Для обеспечения работы асинхронного двигателя требуется фазосдвигающий конденсатор — подобная схема включения двигателя используется в большинстве старых моделей СМ.
В современных машинках для управления асинхронным двигателем используется сложная электронная система управления, поэтому его проверка без специального стенда (или «тестовой» СМ) вызывает определенные затруднения. Еще большие проблемы вызывает проверка двигателей с прямым приводом (например, они используются в машинах LG DirectDrive). Их трудно проверить отдельно, так как они являются частью конструкции бака. К тому же, для этих двигателей также необходима сложная система управления.
Для обеспечения работы асинхронного двигателя требуется фазосдвигающий конденсатор — подобная схема включения двигателя используется в большинстве старых моделей СМ.
В современных машинках для управления асинхронным двигателем используется сложная электронная система управления, поэтому его проверка без специального стенда (или «тестовой» СМ) вызывает определенные затруднения. Еще большие проблемы вызывает проверка двигателей с прямым приводом (например, они используются в машинах LG DirectDrive). Их трудно проверить отдельно, так как они являются частью конструкции бака. К тому же, для этих двигателей также необходима сложная система управления.
| Как должна происходить разборка электродвигателя | |||||
| |||||
 Место посадки заливают керосином или антикоррозионной жидкостью для устранения коррозии в месте контакта. При снятии этих деталей используют двух- или трехлапчатые съемники (переносные ручные или гидравлические).
Место посадки заливают керосином или антикоррозионной жидкостью для устранения коррозии в месте контакта. При снятии этих деталей используют двух- или трехлапчатые съемники (переносные ручные или гидравлические).
| Системы плавного пуска высоковольтных электродвигателей на основе устройств серии УППВЭ | |||||
| |||||
| Электрическая схема пуска трехфазного электродвигателя | |||||
| |||||
 На рис 1. показан вариант схемы пуска с питанием катушки магнитного пускателя переменным током напряжением 220 вольт. Напряжение снимается с двух проводов: любого фазного провода и нейтрального провода (на схеме рис.1 провода «C» и «N»).
На рис 1. показан вариант схемы пуска с питанием катушки магнитного пускателя переменным током напряжением 220 вольт. Напряжение снимается с двух проводов: любого фазного провода и нейтрального провода (на схеме рис.1 провода «C» и «N»).
| Устройство асинхронного электродвигателя | |||||
| |||||
 Статор и ротор собираются из отдельных штампованных листов электротехнической стали толщиной 0,35-0,5 мм. Отдельные листы стали изолируются один от другого слоем лака. Воздушный зазор между статором и ротором делается как можно меньше (0,3-0,35 мм в машинах малой мощности и 1-1,5 мм в машинах большой мощности).
Статор и ротор собираются из отдельных штампованных листов электротехнической стали толщиной 0,35-0,5 мм. Отдельные листы стали изолируются один от другого слоем лака. Воздушный зазор между статором и ротором делается как можно меньше (0,3-0,35 мм в машинах малой мощности и 1-1,5 мм в машинах большой мощности).
| ЭЛЕКТРОДВИГАТЕЛЬ БЕСКОНТАКТНЫЙ МОМЕНТНЫЙ ДБМ254-120-57 |
| ШИМ-регуляторы оборотов маломощных коллекторных электродвигателей | |||||
| |||||
 Однако такой вариант дает низкий КПД, не дает возможности делать плавную регулировку (переменные резисторы в несколько десятков Ом не распространены).
Однако такой вариант дает низкий КПД, не дает возможности делать плавную регулировку (переменные резисторы в несколько десятков Ом не распространены).
Регулировка оборотов асинхронного двигателя своими руками
Нередко работа некоторой электромеханической техники требует снижения частоты вращения вала. Добиться этого поможет регулировка оборотов асинхронного двигателя.
Понятие АД
Электродвигатели АС тока применяются во многих сферах жизни. Их используют для трансформации электрической энергии, которая передается от электроцепи, в механическую. Для этой цели применяется асинхронный электромотор. Как понятно из названия: «асинхронный» — не одновременный. Это значит, что частота вращения ротора и статора различные.
Как понятно из названия: «асинхронный» — не одновременный. Это значит, что частота вращения ротора и статора различные.
ПОСМОТРЕТЬ ВИДЕО
Трехфазный
Такие электромоторы большей частью используются в производстве. Принцип работы устанавливается по его конструкции – с фазным или короткозамкнутым ротором. Чтобы его запустить не нужна стартовая обмотка, конденсатор или прочие приборы. Пусковой ток, а также мощность достаточно высокие. Применяется в станках, насосах, сельхозтехнике.
Виды ротора
В трехфазных АД используются следующие виды роторов:
- замкнутые – составляют 90% всех элетродвигателей. Бывают различной мощности от 250 Вт;
- фазные – их устройства и принцип работы отличаются от трехфазного электродвигателя.
Однофазный АД
Используется в большей части электромоторов. Ротор короткозамкнутый. При подключении в основную обмотку поступает ток, ротор начинает вибрировать (для вращения ему нужен пусковой механизм).
Метод работы и число оборотов АД
Основными деталями асинхронного мотора являются ротор и статор. Напряжение, которое передается на обмотку стартера, образует магнитные потоки. Они отклонены геометрически на 1200С.
Магнитное поле и ток в обмотках формируют электромагнитный поток, который заставляет ротор крутиться. Кроме того, в проводниках ротора возникает ЭДС. В замкнутой электрической цепи обмотки ротора появляется ток, который взаимодействует с магнитным полем стартера. В результате создается момент, когда ротор начинает вращаться.
Подключение тока к обмотке
Обмотка стартера и ротора могут подключаться к различным источникам тока. о того, их соединяют параллельно или последовательно — именно поэтому АД встречаются в большинстве бытовых электроприборов.
Частота вращения
Частоту оборотов АДКР (N) вычисляют по формуле: 60F (частота напряжения в сети)/p (число полюсных пар статора, измеряется в об/мин).
Обычно тех. характеристики указаны на корпусе двигателя. Если такой информации по какой-то причине нет, то число оборотов вычисляют по другим признакам:
- количеству катушек;
- учитывается диаметральный шаг отмотки;
- количеству полюсов по сердечнику статора.
Методы подстройки оборотов мотора
Регулятор частоты вращения асинхронного двигателя позволяет установить необходимый режим работы более ровно, чем с механическим редуктором. В основном, применяется семь основных видов регулировки. Они подразделяются на два направления:
- Смена магнитного поля в статоре – происходит за счет регулировки напряжения, переключения числа полюсных пар. Этот метод используется только в электродвигателях с короткозамкнутым ротором.
- Смена параметров скольжения – корректируется за счет питающего напряжения, подсоединения добавочного питания в электроцепь ротора.
 Применяют для фазных роторов.
Применяют для фазных роторов.
Регулировка оборотов асинхронного двигателя своими руками позволит точно настроить рабочие режимы. При использовании этих способов происходит варьирование скорости вращения без снижения мощности и потери коэффициента полезного действия.
Особенности частотного регулятора
Отрегулировать обороты двигателя можно с помощью частотного регулятора. На сегодняшний момент это основной способ регулировки мощности устройств, в которых приводом является электромотор. Регулятор частоты вращения двигателя позволяет изменять скорость с помощью полупроводниковых преобразователей.
Схемы управления оборотами двигателя
Схема тиристорного регулятора
Тиристорный регулятор оборотов двигателя постоянного тока используют для корректировки нагрузки в лампах накаливания и других электроприборах. Схема управления упорядочивает момент открытия/закрытия тиристоров относительно перехода фазы через ноль.
ПОСМОТРЕТЬ ВИДЕО
Схема регулятора оборотов коллекторного двигателя 220в
Регулятор оборотов коллекторного двигателя работает от стандартного напряжения в сети. Используется в обычных бытовых приборах.
Регулятор 220 В своими руками
Регулятор оборотов коллекторного двигателя 220в своими руками сделать не сложно. Для этого следует придерживаться определенной схемы. Самодельный регулятор оборотов двигателя будет контролировать 1 полупериод. Для серьезной техники лучше приобрести магазинный вариант.
ПОСМОТРЕТЬ ВИДЕО
Усовершенствование преобразователя частоты для сети 380 в
Управление скоростью электродвигателя вентилятора осуществляется с помощью частотного регулятора РМТ, принцип работы которого основан на регулировке частоты.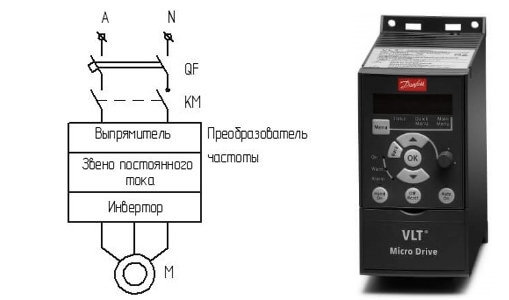 Чтобы узнать, как понизить обороты двигателя, следует обратить внимание на схему:
Чтобы узнать, как понизить обороты двигателя, следует обратить внимание на схему:
ПОСМОТРЕТЬ ВИДЕО
Регулятор оборотов электродвигателя: назначение, принцип работы, подключение
В большинстве современных бытовых и промышленных приборов применяются электрические машины, совершающие какую-либо полезную работу. В качестве рабочего инструмента в них могут выступать самые разнообразные приспособления, которые необходимо вращать с различной скоростью. Для изменения этого параметра используется регулятор оборотов электродвигателя.
Назначение
Технически регулятор оборотов электродвигателя предназначен для изменения количества вращения вала за единицу времени. На этапе разгона корректировка частоты обеспечивает более плавную процедуру, меньшие токи и т. д. В некоторых технологических процессах необходимо регулятор оборотов снижает скорость движения оборудования, изменение подачи или нагнетания сырья и т.д.
д. В некоторых технологических процессах необходимо регулятор оборотов снижает скорость движения оборудования, изменение подачи или нагнетания сырья и т.д.
Однако на практике данная опция может преследовать и другие цели:
- Экономия затрат электроэнергии – позволяет снизить потери в моменты пуска и остановки вращений мотора, переключения скоростей или регулировки тяговых характеристик. Особенно актуально для часто запускаемых электродвигателей, использующих кратковременные режимы работы.
- Контроль температурного режима, величины давления без установки обратной связи с рабочим элементом или с таковой в асинхронных электродвигателях.
- Плавный пуск – предотвращает бросок тока в момент включения, особенно актуально для асинхронных моторов с большой нагрузкой на валу. Приводит к существенному сокращению токовых нагрузок на сеть и исключает ложные срабатывания защитной аппаратуры.
- Поддержание оборотов трехфазных электродвигателей на требуемой отметке.
 Актуально для точных технологических операций, где из-за колебаний питающего напряжения может нарушиться качество производства или на валу возникает разное усилие.
Актуально для точных технологических операций, где из-за колебаний питающего напряжения может нарушиться качество производства или на валу возникает разное усилие. - Регулировка скорости оборотов электродвигателя от 0 до максимума или от другой базовой скорости.
- Обеспечения достаточного момента на низких частотах вращения электрической машины.
Возможность реализации тех или иных функций у регуляторов оборотов определяет как принцип их действия, так и схематическое исполнение.
Принцип работы
Для регулировки оборотов может использоваться способ понижения или повышения напряжения, изменение силы тока и частоты, подаваемых в обмотки асинхронных и коллекторных электродвигателей. Поэтому далее рассмотрим варианты частотных преобразователей и регуляторов напряжения.
Среди используемых в промышленной и бытовой сфере следует выделить:
- Введение рабочего сопротивления – реализуется при помощи переменных резисторов, делителей и прочих преобразователей.
 Хорошо обеспечивает снижение в однофазных двигателях за счет контроля скольжения (разницы между магнитным полем статора и скоростью вращения асинхронных агрегатов). Для этого устанавливаются электродвигатели большей мощности, чтобы на них можно было подавать меньшее напряжение. Соотношение по скорости оборотов будет составлять до 2 раз в сторону уменьшения.
Хорошо обеспечивает снижение в однофазных двигателях за счет контроля скольжения (разницы между магнитным полем статора и скоростью вращения асинхронных агрегатов). Для этого устанавливаются электродвигатели большей мощности, чтобы на них можно было подавать меньшее напряжение. Соотношение по скорости оборотов будет составлять до 2 раз в сторону уменьшения. - Автотрансформаторный – выполняется путем перемещения подвижного контакта по обмотке, что снижает или увеличивает скорость вращения электродвигателя. Преимущество такого принципа заключается в четкой синусоиде переменного тока и большой перегрузочной способности.
- Тиристорный или симисторный – изменяет величину питающего напряжения посредством пары встречно включенных тиристоров или совместного включения с симистором. Этот способ применим не только в асинхронных двигателях, но и других бытовых приборах – диммерах, переключателях и т.д.
Как видите на схеме, подаваемое на тот же асинхронный однофазный электродвигатель напряжение, проходит через переменный резистор R1 на тиристор D1 и на управляющий электрод симистора T1. Перемещая ручку тиристорного регулятора R1 изменяем и скорость вращения однофазного электродвигателя.
Перемещая ручку тиристорного регулятора R1 изменяем и скорость вращения однофазного электродвигателя.
- Транзисторный – позволяет изменять форму подаваемого напряжения за счет преобразования числа импульсов и временной паузы между подаваемым напряжением. Благодаря чему получил название широтно-импульсной модуляции, пример такого регулятора приведена на схеме ниже.
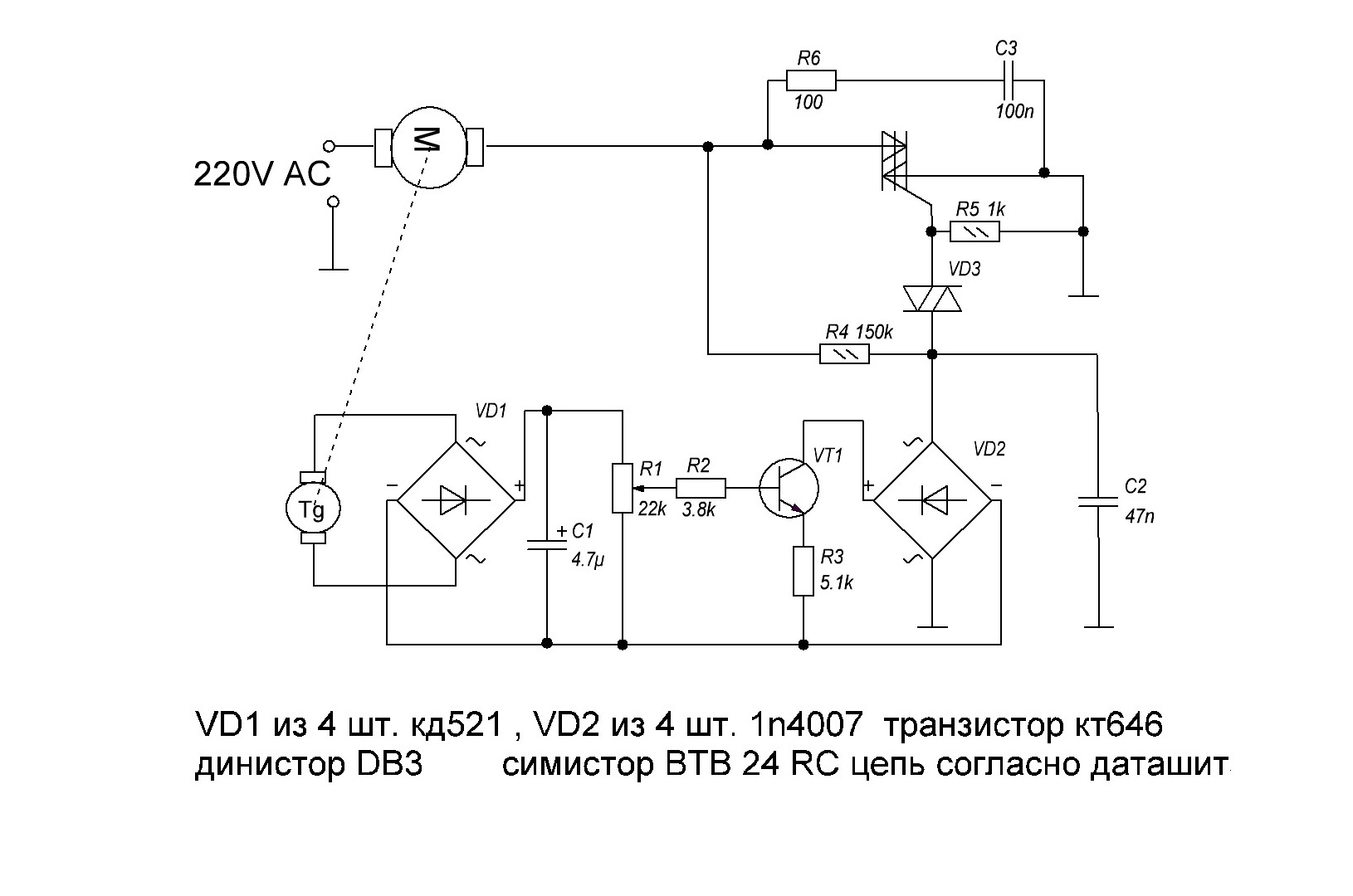
Здесь питание однофазного асинхронного двигателя производится от линии 220В через выпрямительный блок VD1-4, далее напряжение поступает на эмиттер и коллектор транзисторов VT1 и VT2. Подавая управляющий сигнал на базы этих транзисторов, и регулируют обороты мотора.
- Частотный – преобразует частоту подаваемого напряжения на обмотки однофазного или трехфазного асинхронного электродвигателя. Это наиболее современный способ, ранее он относился к дорогостоящим, но с появлением дешевых высоковольтных полупроводников и микроконтроллеров перешел в разряд наиболее эффективных.
 Может реализовываться с помощью транзисторов, микросхем или микроконтроллеров, способных уменьшать или увеличивать частоту ШИМ.
Может реализовываться с помощью транзисторов, микросхем или микроконтроллеров, способных уменьшать или увеличивать частоту ШИМ.
- Полюсный – позволяет регулировать частоту вращения электродвигателя при переключении количества катушек в фазных обмотках, в результате чего изменяется направление и величина тока, протекающего в каждой из них. Реализуется как за счет намотки нескольких катушек для каждой из фаз, так и одновременным последовательным или параллельным соединением катушек, такой принцип приведен на рисунке ниже.
Как выбрать?
Конкретная модель регулятора оборотов должна подбираться в соответствии с типом подключаемой электрической машины – коллекторный двигатель, трехфазный или однофазный электродвигатель. В соответствии с чем и подбирается определенный преобразователь частоты вращения.
Помимо этого для регулятора оборотов необходимо выбрать:
- Тип управления – выделяют два способа: скалярный и векторный.
 Первый из них привязывается к нагрузке на валу и является более простым, но менее надежным. Второй отстраивается по обратной связи от величины магнитного потока и выступает полной противоположностью первого.
Первый из них привязывается к нагрузке на валу и является более простым, но менее надежным. Второй отстраивается по обратной связи от величины магнитного потока и выступает полной противоположностью первого. - Мощность – должна выбираться не менее или даже больше, чем номинал подключаемого электродвигателя на максимальных оборотах, желательно обеспечивать запас, особенно для электронных регуляторов.
- Номинальное напряжение – выбирается в соответствии с величиной разности потенциалов для обмоток асинхронного или коллекторного электродвигателя. Если вы подключаете к заводскому или самодельному регулятору одну электрическую машину, будет достаточно именно такого номинала, если их несколько, частотный регулятор должен иметь широкий диапазон по напряжению.
- Диапазон частот вращения – подбирается в соответствии с конкретным типом оборудования. К примеру, для вращения вентилятора достаточно от 500 до 1000 об/мин, а вот станку может потребоваться до 3000 об/мин.

- Габаритные размеры и вес – выбирайте таким образом, чтобы они соответствовали конструкции оборудования, не мешали работе электродвигателя. Если под регулятор оборотов будет использоваться соответствующая ниша или разъем, то размеры подбираются в соответствии с величиной свободного пространства.
Подключение
Способ подключения регулятора оборотов электродвигателя будет отличаться в зависимости от его типа и принципа действия. Поэтому в качестве примера мы разберем один из наиболее распространенных частотных регуляторов, которые используются в самых различных сферах.
Перед подключением обязательно ознакомьтесь с заводской схемой. Как правило, вы можете увидеть ее на самом регуляторе оборотов, либо в паспорте устройства:
Схема подключения регулятораДалее, пользуясь распиновкой, можно определить количество выводов, которые будут использоваться для подключения регулятора электродвигателя к сети. В нашем примере, рассмотрим случай, когда применяется трехпроводная система, значит, понадобится фаза, ноль и земля. На задней панели регулятора это два вывода AC и FG:
На задней панели регулятора это два вывода AC и FG:
Затем необходимо проверить цветовую маркировку разъема с приведенной схемой и сопоставить ее со всеми элементами электродвигателя, которые будут подключаться в вашем случае. Если какие-то выводы окажутся лишними, их можно закоротить, как показано на рисунке выше.
Проверьте цветовую маркировкуЕсли все выводы регулятора соответствуют клеммам электродвигателя, можете подсоединять их друг к другу и к сети.
Как понизить обороты электродвигателя 380в
Электрика своими руками
егулировка оборотов электродвигателя часто бывает необходима как в производственных, так и каких то бытовых целях. В первом случае для уменьшения или увеличения частоты вращения применяются промышленные регуляторы напряжения – инверторные частотные преобразователи. А с вопросом, как регулировать обороты электродвигателя в домашних условиях, попробуем разобраться подробнее.
Необходимо сразу сказать, что для разных типов однофазных и трехфазных электрических машин должны применяться разные регуляторы мощности. Т.е. для асинхронных машин применение тиристорных регуляторов, являющихся основными для изменения вращения коллекторных двигателей, недопустимо.
Т.е. для асинхронных машин применение тиристорных регуляторов, являющихся основными для изменения вращения коллекторных двигателей, недопустимо.
Лучший способ уменьшить обороты вашего устройства – не в регулировке частоты вращения самого движка, а посредством редуктора или ременной передачи. При этом сохранится самое главное – мощность устройства.
Немного теории об устройстве и области применения коллекторных электродвигателей
Электродвигатели этого типа могут быть постоянного или переменного тока, с последовательным, параллельным или смешанным возбуждением ( для переменного тока применяется только первые два вида возбуждения).
Коллекторный электродвигатель состоит из ротора, статора, коллектора и щеток. Ток в цепи, проходящий через соединенные определенным образом обмотки статора и ротора, создает магнитное поле, заставляющее последний вращаться. Напряжение на ротор передается при помощи щеток из мягкого электропроводного материала, чаще всего это графит или медно-графитовая смесь. Если изменить направление тока в роторе или статоре, вал начнет вращаться в другую сторону, причем это всегда делается с выводами ротора, что бы не происходило перемагничивание сердечников.
Если изменить направление тока в роторе или статоре, вал начнет вращаться в другую сторону, причем это всегда делается с выводами ротора, что бы не происходило перемагничивание сердечников.
При одновременном изменении подключения и ротора и статора реверсирования не произойдет. Существуют также трехфазные коллекторные электродвигатели, но это уже совсем другая история.
Электродвигатели постоянного тока с параллельным возбуждением
Обмотка возбуждения (статорная) в двигателе с параллельным возбуждением состоит из большого количества витков тонкого провода и включена параллельно ротору, сопротивление обмотки которого намного меньше. Поэтому для уменьшения тока во время запуска электродвигателей мощностью более 1 Квт в цепь ротора включают пусковой реостат. Управление оборотами электродвигателя при такой схеме включения производится путем изменения тока только в цепи статора, т.к. способ понижения напряжения на клеммах очень не экономичен и требует применение регулятора большой мощности.
Если нагрузка мала, то при случайном обрыве обмотки статора при использовании такой схемы частота вращения превысит максимально допустимую и электродвигатель может пойти “вразнос”
Электродвигатели постоянного тока с последовательным возбуждением
Обмотка возбуждения такого электродвигателя имеет небольшое число витков толстого провода, и при ее последовательном включении в цепь якоря ток во всей цепи будет одинаков. Электродвигатели этого типа более выносливы при перегрузках и поэтому наиболее часто встречаются в бытовых устройствах.
Регулировка оборотов электродвигателя постоянного тока с последовательно включенной обмоткой статора может производиться двумя способами:
- Подключением параллельно статору регулировочного устройства, изменяющего магнитный поток. Однако этот способ довольно сложен в реализации и не применяется в бытовых устройствах.
- Регулирование (снижение) оборотов с помощью уменьшения напряжения.
 Этот способ применяется практически во всех электрических устройствах – бытовых приборах, инструменте и т.д.
Этот способ применяется практически во всех электрических устройствах – бытовых приборах, инструменте и т.д.
Электродвигатели коллекторные переменного тока
Эти однофазные моторы имеют меньший КПД, чем двигатели постоянного тока, но из за простоты изготовления и схем управления нашли наиболее широкое применение в бытовой технике и электроинструменте. Их можно назвать “универсальными”, т.к. они способны работать как при переменном, так и при постоянном токе. Это обусловлено тем, что при включении в сеть переменного напряжение направление магнитного поля и тока будет изменяться в статоре и роторе одновременно, не вызывая изменения направления вращения. Реверс таких устройств осуществляется переполюсовкой концов ротора.
Для улучшения характеристик в мощных (промышленных) коллекторных электродвигателях переменного тока применяются дополнительные полюса и компенсационные обмотки. В двигателях бытовых устройств таких приспособлений нет.
Регуляторы оборотов электродвигателя
Схемы изменения частоты вращения электродвигателей в большинстве случаев построены на тиристорных регуляторах, ввиду своей простоты и надежности.
Принцип работы представленной схемы следующий: конденсатор С1 заряжается до напряжения пробоя динистора D1 через переменный резистор R2, динистор пробивается и открывает симистор D2, управляющий нагрузкой. Напряжение на нагрузке зависит от частоты открывания D2, зависящее в свою очередь от положения движка переменного сопротивления. Данная схема не снабжена обратной связью, т.е. при изменении нагрузки обороты также будут меняться и их придется подстраивать. По такой же схеме происходит управление оборотами импортных бытовых пылесосов.
Благодаря надежности и простоте конструкции асинхронные двигатели (АД) получили широкое распространение. В большинстве станков, промышленном и бытовом оборудовании применяются электродвигатели такого типа. Изменение скорости вращения АД производится механически (дополнительной нагрузкой на валу, балластом, передаточными механизмами, редукторами и т.д.) или электрическими способами. Электрическое регулирование более сложное, но и гораздо более удобное и универсальное.
Для многих агрегатов применяется именно электрическое управление. Оно обеспечивает точное и плавное регулирование пуска и работы двигателя. Электрическое управление производится за счет:
- изменения частоты тока;
- силы тока;
- уровня напряжения.
В этой статье мы рассмотрим популярные способы, как может осуществляться регулировка оборотов асинхронного двигателя на 220 и 380В.
Изменение скорости АД с короткозамкнутым ротором
Существует несколько способов:
- Управление вращением за счет изменения электромагнитного поля статора: частотное регулирование и изменение числа пар полюсов.
- Изменение скольжения электромотора за счет уменьшения или увеличения напряжения (может применяться для АД с фазным ротором).
Частотное регулирование
В данном случае регулировка производится с помощью подключенного к двигателю устройства для преобразования частоты. Для этого применяются мощные тиристорные преобразователи. Процесс частотного регулирования можно рассмотреть на примере формулы ЭДС трансформатора:
Процесс частотного регулирования можно рассмотреть на примере формулы ЭДС трансформатора:
Данное выражение означает, что для сохранения постоянного магнитного потока, означающего сохранение перегрузочной способности электромотора, следует одновременно с преобразованием частоты корректировать и уровень питающего напряжения. Если сохраняется выражение, вычисленное по формуле:
то это означает, что критический момент не изменен. А механические характеристики соответствуют рисунку ниже, если вы не понимаете, что значат эти характеристики, то в этом случае регулировка происходит без потери мощности и момента.
Достоинствами данного метода являются:
- плавное регулирование;
- изменение скорости вращения ротора в большую и меньшую сторону;
- жесткие механические характеристики;
- экономичность.
Недостаток один — необходимость в частотном преобразователе, т.е. увеличение стоимости механизма. К слову, на современном рынке представлены модели с однофазным и трёхфазным входом, стоимость которых при мощности 2-3 кВт лежит в диапазоне 100-150 долларов, что не слишком дорого для полноценной регулировки привода станков в частной мастерской.
Переключение числа пар полюсов
Данный метод применяется для многоскоростных двигателей со сложной обмоткой, позволяющей изменять число пар ее полюсов. Самое широкое применение получили двухскоростные, трехскоростные и четырехскоростные АД. Принцип регулировки проще всего рассмотреть на основе двухскоростного АД. В такой машине обмотка каждой фазы состоит из двух полуобмоток. Скорость вращения изменяется при подключении их последовательно или параллельно.
В четырехскоростном электродвигателе обмотка выполнена в виде двух независимых друг от друга частей. При изменении числа пар полюсов первой обмотки производится изменение скорости работы электромотора с 3000 до 1500 оборотов в минуту. При помощи второй обмотки производится регулировка вращения 1000 и 500 оборотов в минуту.
При изменении числа пар полюсов происходит и изменение критического момента. Для его сохранения неизменным, требуется одновременно с изменением числа пар полюсов регулировать и питающее напряжение, например, переключением схемы звезда-треугольник и их вариациями.
Достоинства данного метода:
- жесткие механические характеристики двигателя;
- высокий КПД.
- ступенчатая регулировка;
- большой вес и габаритные размеры;
- высокая стоимость электромотора.
Способы управления скоростью АД с фазным ротором
Изменение скорости вращения АД с фазным ротором производится путем изменения скольжения. Рассмотрим основные варианты и способы.
Изменение питающего напряжения
Этот способ также применяется для АД с КЗ ротором. Асинхронный двигатель подключается через автотрансформатор или ЛАТР. Если уменьшать напряжение питания, частота вращения двигателя снизится.
Но такой режим уменьшает перегрузочную способность двигателя. Этот способ применяется для регулирования в пределах напряжения не выше номинального, так как увеличение номинального напряжения приведет к выходу электродвигателя из строя.
Активное сопротивление в цепи ротора
При использовании данного метода в цепь ротора подключается реостат или набор постоянных резисторов большой мощности.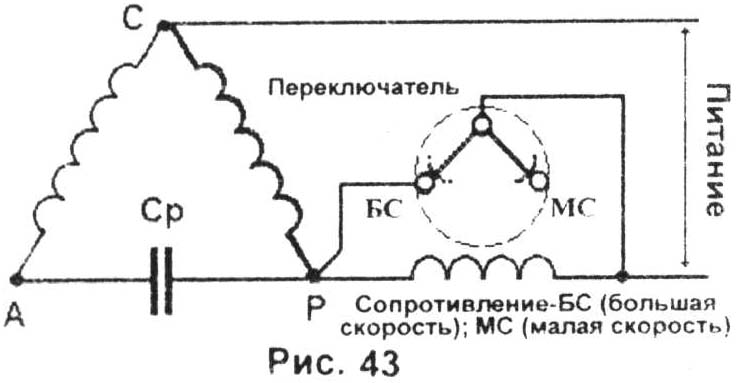 Данное устройство предназначено для плавного увеличения сопротивления.
Данное устройство предназначено для плавного увеличения сопротивления.
Скольжение растет пропорционально увеличению сопротивления, а скорость вращения вала электромотора при этом снижается.
- большой диапазон регулирования в сторону понижения скорости вращения.
- снижение КПД;
- увеличение потерь;
- ухудшение механических характеристик.
Асинхронный вентильный каскад и машины двойного питания
Изменение скорости работы асинхронных электромоторов в данных случаях выполняется путем изменения скольжения. При этом скорость вращения электромагнитного поля неизменна. Напряжение подается напрямую на обмотки статора. Регулировка происходит за счет использования мощности скольжения, которая трансформируется в цепь ротора, и образует добавочную ЭДС. Такие методы используются только в специальных машинах и крупных промышленных устройствах.
Плавный пуск асинхронных электродвигателей
АД кроме безусловных преимуществ, обладают существенными недостатками. Это рывок на старте и большие пусковые токи, в 7 раз превышающие номинальные. Для мягкого старта электродвигателя используются следующие методы:
Это рывок на старте и большие пусковые токи, в 7 раз превышающие номинальные. Для мягкого старта электродвигателя используются следующие методы:
- переключение обмоток по схеме звезда – треугольник;
- включение электродвигателя через автотрансформатор;
- использование специализированных устройств для плавного пуска.
В большинстве частотных регуляторов есть функция плавного пуска двигателя. Это не только снижает пусковые токи, но и уменьшает нагрузки на исполнительные механизмы. Поэтому регулирование частоты и плавный пуск довольно сильно связаны между собой.
Как сделать устройство для изменения скорости вращения электродвигателя своими руками
Для регулировки маломощных однофазных АД можно использовать диммеры. Однако этот способ ненадежен и обладает серьезными недостатками: снижением КПД, серьезным перегревом устройства и опасностью повреждения двигателя.
Для надежного и качественного регулирования оборотов электродвигателей на 220В, лучше всего подходит частотное регулирование.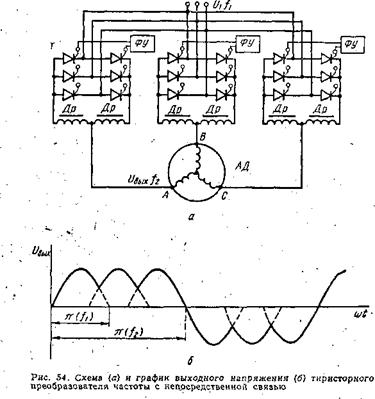
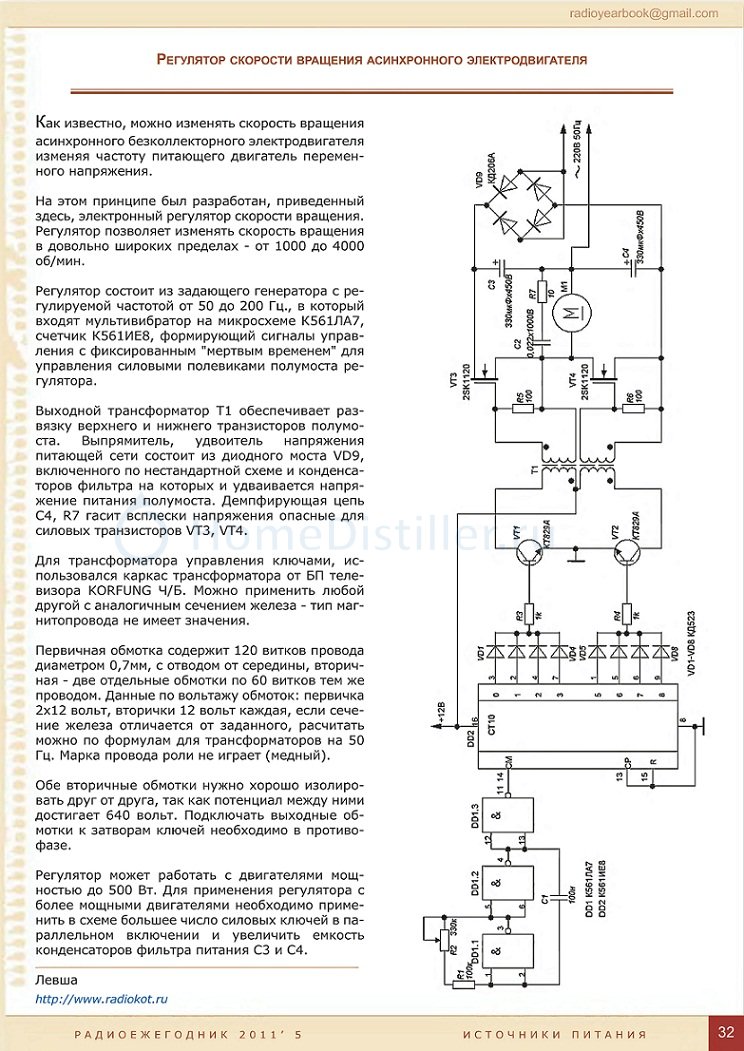
Приведенная ниже схема позволяет собрать частотное устройство для регулировки электромоторов мощностью до 500 Вт. Изменение скорости вращения производится в границах от 1000 до 4000 оборотов в минуту.
Устройство состоит из задающего генератора с изменяемой частотой, состоящего из мультивибратора, собранного на микросхеме К561ЛА7, счетчика на микросхеме К561ИЕ8, полумоста регулятора. Выходной трансформатор Т1 выполняет развязку верхнего и нижнего транзисторов полумоста.
Демпфирующая цепь С4, R7 гасит всплески напряжения опасные для силовых транзисторов VT3, VT4. Выпрямитель, удвоитель напряжения питающей сети, включает в себя диодный мост VD9, с конденсатором фильтра на которых происходит удвоение напряжения питания полумоста.
Напряжение первичной обмотки: 2х12В, вторичной обмотки 12В. Первичная обмотка трансформатора управления ключами, состоит из 120 витков медного провода сечением 0,7мм, с отводом от середины. Вторичная – две обмотки, каждая по 60 витков повода сечением 0,7 мм.
Вторичные обмотки необходимо максимально надежно заизолировать друг от друга, так как разница потенциалов между ними доходит до 640 В. Подключение выходных обмоток к затворам ключей производится в противофазе.
Вот мы и рассмотрели способы регулировки оборотов асинхронных двигателей. Если возникли вопросы, задавайте их в комментариях под статьей!
Благодаря надежности и простоте конструкции асинхронные двигатели (АД) получили широкое распространение. В большинстве станков, промышленном и бытовом оборудовании применяются электродвигатели такого типа. Изменение скорости вращения АД производится механически (дополнительной нагрузкой на валу, балластом, передаточными механизмами, редукторами и т.д.) или электрическими способами. Электрическое регулирование более сложное, но и гораздо более удобное и универсальное.
Для многих агрегатов применяется именно электрическое управление. Оно обеспечивает точное и плавное регулирование пуска и работы двигателя. Электрическое управление производится за счет:
- изменения частоты тока;
- силы тока;
- уровня напряжения.
В этой статье мы рассмотрим популярные способы, как может осуществляться регулировка оборотов асинхронного двигателя на 220 и 380В.
Изменение скорости АД с короткозамкнутым ротором
Существует несколько способов:
- Управление вращением за счет изменения электромагнитного поля статора: частотное регулирование и изменение числа пар полюсов.
- Изменение скольжения электромотора за счет уменьшения или увеличения напряжения (может применяться для АД с фазным ротором).
Частотное регулирование
В данном случае регулировка производится с помощью подключенного к двигателю устройства для преобразования частоты. Для этого применяются мощные тиристорные преобразователи. Процесс частотного регулирования можно рассмотреть на примере формулы ЭДС трансформатора:
Данное выражение означает, что для сохранения постоянного магнитного потока, означающего сохранение перегрузочной способности электромотора, следует одновременно с преобразованием частоты корректировать и уровень питающего напряжения. Если сохраняется выражение, вычисленное по формуле:
Если сохраняется выражение, вычисленное по формуле:
то это означает, что критический момент не изменен. А механические характеристики соответствуют рисунку ниже, если вы не понимаете, что значат эти характеристики, то в этом случае регулировка происходит без потери мощности и момента.
Достоинствами данного метода являются:
- плавное регулирование;
- изменение скорости вращения ротора в большую и меньшую сторону;
- жесткие механические характеристики;
- экономичность.
Недостаток один — необходимость в частотном преобразователе, т.е. увеличение стоимости механизма. К слову, на современном рынке представлены модели с однофазным и трёхфазным входом, стоимость которых при мощности 2-3 кВт лежит в диапазоне 100-150 долларов, что не слишком дорого для полноценной регулировки привода станков в частной мастерской.
Переключение числа пар полюсов
Данный метод применяется для многоскоростных двигателей со сложной обмоткой, позволяющей изменять число пар ее полюсов.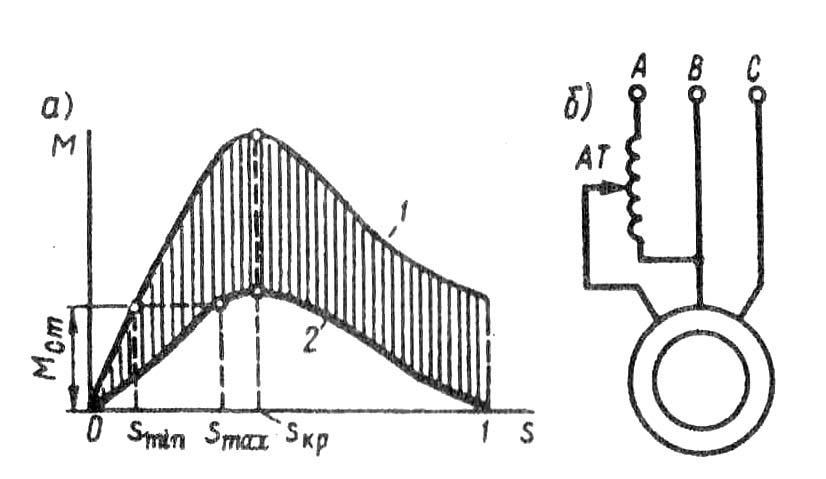 Самое широкое применение получили двухскоростные, трехскоростные и четырехскоростные АД. Принцип регулировки проще всего рассмотреть на основе двухскоростного АД. В такой машине обмотка каждой фазы состоит из двух полуобмоток. Скорость вращения изменяется при подключении их последовательно или параллельно.
Самое широкое применение получили двухскоростные, трехскоростные и четырехскоростные АД. Принцип регулировки проще всего рассмотреть на основе двухскоростного АД. В такой машине обмотка каждой фазы состоит из двух полуобмоток. Скорость вращения изменяется при подключении их последовательно или параллельно.
В четырехскоростном электродвигателе обмотка выполнена в виде двух независимых друг от друга частей. При изменении числа пар полюсов первой обмотки производится изменение скорости работы электромотора с 3000 до 1500 оборотов в минуту. При помощи второй обмотки производится регулировка вращения 1000 и 500 оборотов в минуту.
При изменении числа пар полюсов происходит и изменение критического момента. Для его сохранения неизменным, требуется одновременно с изменением числа пар полюсов регулировать и питающее напряжение, например, переключением схемы звезда-треугольник и их вариациями.
Достоинства данного метода:
- жесткие механические характеристики двигателя;
- высокий КПД.

- ступенчатая регулировка;
- большой вес и габаритные размеры;
- высокая стоимость электромотора.
Способы управления скоростью АД с фазным ротором
Изменение скорости вращения АД с фазным ротором производится путем изменения скольжения. Рассмотрим основные варианты и способы.
Изменение питающего напряжения
Этот способ также применяется для АД с КЗ ротором. Асинхронный двигатель подключается через автотрансформатор или ЛАТР. Если уменьшать напряжение питания, частота вращения двигателя снизится.
Но такой режим уменьшает перегрузочную способность двигателя. Этот способ применяется для регулирования в пределах напряжения не выше номинального, так как увеличение номинального напряжения приведет к выходу электродвигателя из строя.
Активное сопротивление в цепи ротора
При использовании данного метода в цепь ротора подключается реостат или набор постоянных резисторов большой мощности. Данное устройство предназначено для плавного увеличения сопротивления.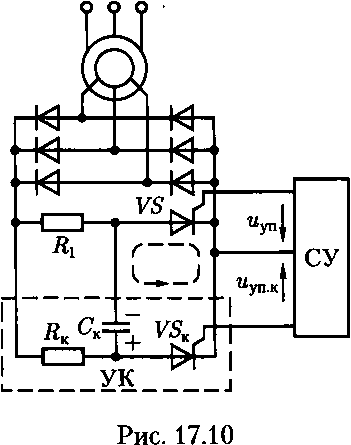
Скольжение растет пропорционально увеличению сопротивления, а скорость вращения вала электромотора при этом снижается.
- большой диапазон регулирования в сторону понижения скорости вращения.
- снижение КПД;
- увеличение потерь;
- ухудшение механических характеристик.
Асинхронный вентильный каскад и машины двойного питания
Изменение скорости работы асинхронных электромоторов в данных случаях выполняется путем изменения скольжения. При этом скорость вращения электромагнитного поля неизменна. Напряжение подается напрямую на обмотки статора. Регулировка происходит за счет использования мощности скольжения, которая трансформируется в цепь ротора, и образует добавочную ЭДС. Такие методы используются только в специальных машинах и крупных промышленных устройствах.
Плавный пуск асинхронных электродвигателей
АД кроме безусловных преимуществ, обладают существенными недостатками. Это рывок на старте и большие пусковые токи, в 7 раз превышающие номинальные. Для мягкого старта электродвигателя используются следующие методы:
Для мягкого старта электродвигателя используются следующие методы:
- переключение обмоток по схеме звезда – треугольник;
- включение электродвигателя через автотрансформатор;
- использование специализированных устройств для плавного пуска.
В большинстве частотных регуляторов есть функция плавного пуска двигателя. Это не только снижает пусковые токи, но и уменьшает нагрузки на исполнительные механизмы. Поэтому регулирование частоты и плавный пуск довольно сильно связаны между собой.
Как сделать устройство для изменения скорости вращения электродвигателя своими руками
Для регулировки маломощных однофазных АД можно использовать диммеры. Однако этот способ ненадежен и обладает серьезными недостатками: снижением КПД, серьезным перегревом устройства и опасностью повреждения двигателя.
Для надежного и качественного регулирования оборотов электродвигателей на 220В, лучше всего подходит частотное регулирование.
Приведенная ниже схема позволяет собрать частотное устройство для регулировки электромоторов мощностью до 500 Вт. Изменение скорости вращения производится в границах от 1000 до 4000 оборотов в минуту.
Изменение скорости вращения производится в границах от 1000 до 4000 оборотов в минуту.
Устройство состоит из задающего генератора с изменяемой частотой, состоящего из мультивибратора, собранного на микросхеме К561ЛА7, счетчика на микросхеме К561ИЕ8, полумоста регулятора. Выходной трансформатор Т1 выполняет развязку верхнего и нижнего транзисторов полумоста.
Демпфирующая цепь С4, R7 гасит всплески напряжения опасные для силовых транзисторов VT3, VT4. Выпрямитель, удвоитель напряжения питающей сети, включает в себя диодный мост VD9, с конденсатором фильтра на которых происходит удвоение напряжения питания полумоста.
Напряжение первичной обмотки: 2х12В, вторичной обмотки 12В. Первичная обмотка трансформатора управления ключами, состоит из 120 витков медного провода сечением 0,7мм, с отводом от середины. Вторичная – две обмотки, каждая по 60 витков повода сечением 0,7 мм.
Вторичные обмотки необходимо максимально надежно заизолировать друг от друга, так как разница потенциалов между ними доходит до 640 В. Подключение выходных обмоток к затворам ключей производится в противофазе.
Подключение выходных обмоток к затворам ключей производится в противофазе.
Вот мы и рассмотрели способы регулировки оборотов асинхронных двигателей. Если возникли вопросы, задавайте их в комментариях под статьей!
Частотный регулятор скорости для асинхронного электродвигателя
Асинхронный двигатель одно- или трехфазного тока – один из самых распространенных как в промышленности, так и среди бытовых пользователей, где он может являться основой насосов и маломощных агрегатов различного назначения. К его достоинствам относят:
· надежность, связанную с отсутствием щеточного узла;
· простоту изготовления;
· невысокую стоимость;
· высокий КПД в штатном режиме работы.
О надежности этого оборудования лучше всяких слов говорит то, что на многих объектах можно встретить исправно работающие моторы, которые введены в эксплуатацию более 50 лет назад. Есть у электродвигателей этого типа и ряд недостатков. К самым существенным относятся:
Есть у электродвигателей этого типа и ряд недостатков. К самым существенным относятся:
· низкий крутящий момент на старте;
· ограничение максимальной скорости вращения, зависящее от частоты питающей электросети;
· сложность регулировки скорости вращения электромотора.
Применение частотных преобразователей для двигателей, рассчитанных на работу с напряжением 220В, 380В и выше устраняет или уменьшает все перечисленные недостатки и позволяет добавить в систему с такими двигателями новый функционал.
До применения частотного принципа управления асинхронным мотором при необходимости регулировать скорость использовалось несколько вариантов управления скоростью вращения таких двигателей:
· механическое с помощью редуктора. Своеобразная коробка передач – решение сложное, дорогое, требующее регулярного обслуживания и ремонта. Также понижает общий КПД системы;
· ступенчатое изменение питающего напряжения с помощью трансформатора. Позволяет управлять мощностью двигателя, однако вводит его в нештатный режим, вызывает нагрев. Точная установка скорости вращения в таких системах практически невозможна;
Позволяет управлять мощностью двигателя, однако вводит его в нештатный режим, вызывает нагрев. Точная установка скорости вращения в таких системах практически невозможна;
· электронное с отсеканием части полупериода питающего напряжения с помощью тиристорной схемы. Позволяет регулировать мощность, однако такой принцип управления создает вибрации и также не позволяет точно управлять частотой вращения.
Современные технологии регулировки частоты вращения и мощности предусматривают, в большинстве случаев, использование частотного регулятора на полупроводниковых ключах.
Принцип работы частотного регулятора
Принцип, положенный в основу работы любого современного частотного преобразователя, очень прост:
-
во-первых, нужно выпрямить входное напряжение;
-
во-вторых, его следует отфильтровать и стабилизировать;
-
и, в-третьих, нужно сгенерировать питающее напряжение, по форме близкое к синусоидальному, требуемой частоты и амплитуды.
Этот подход позволяет исключить изменение режима работы привода при колебаниях напряжения в сети и получить возможность точной регулировки скорости вращения и выходной мощности. Такой принцип регулировки применим как к однофазным электромоторам, для которых требуется одна такая схема, так и к трехфазным асинхронным электродвигателям, требующих три группы таких выпрямителей-преобразователей с синхронизацией их работы для получения трехфазного выходного напряжения с заданным сдвигом.
Схемотехника современных преобразователей частоты
С появлением мощных полупроводниковых компонентов, способных управлять высоким напряжением и большими токами схемотехнические решения блоков регулировки частоты стали строиться достаточно просто. Так, для работы в цепях с напряжением на выходе инвертора до 690 В, с успехом применяются схемы на тиристорах и IGBT-транзисторах, которые стоят дороже, но обеспечивают более «чистый» выход. В таких схемах управления на каждую фазу устанавливают по два ключа с соответствующей управляющей обвязкой. Для удешевления конструкции на выходе обычно не используют фильтры для подавления гармоник, поскольку к выходу подключается индуктивная нагрузка.
В таких схемах управления на каждую фазу устанавливают по два ключа с соответствующей управляющей обвязкой. Для удешевления конструкции на выходе обычно не используют фильтры для подавления гармоник, поскольку к выходу подключается индуктивная нагрузка.
Для высоковольтных электродвигателей может использоваться такой же принцип с усложненной схемотехникой. Питание на выходе каждой фазы формируется последовательно подключенными модулями, каждый из которых формирует свой участок выходной синусоиды, а общее напряжение формируется как сумма напряжений на выходе каждого модуля.
Существуют также бестрансформаторные преобразователи и прямые преобразователи частоты без блока выпрямления и фильтрации. Каждое схемотехническое решение имеет свои достоинства и недостатки, которые следует учитывать при выборе. Однако сам блок преобразователя, по какой бы схеме он не был построен, требует еще достаточно сложной автоматики управления режимами работы.
Автоматика управления работой частотного преобразователя
Регулирование режимом работы двигателя через частотный преобразователь выполняется сложной автоматикой управления, которая в большинстве моделей современных частотников строится на основе микроконтроллера или микропроцессора.
Система управления выполняет целый ряд функций, которые значительно расширяют возможности систем на основе асинхронных двигателей. К ним могут относиться:
· программы плавного пуска и остановки электромотора;
· защитное отключение при перегрузках, перегреве и заклинивании;
· модули сопряжения с системой централизованной диспетчеризации;
· возможность подключения внешних датчиков обратной связи, позволяющих управлять работой двигателя для поддержания стабильного состояния системы, например, скорости потока воздуха или давления воды;
· возможность работы по заранее заданной программе.
На рынке сегодня представлены сотни моделей частотных преобразователей для управления асинхронными электромоторами. Причем представлены как универсальные серии, так и специализированные, например, для лифтового, насосного или вентиляционного оборудования, что несколько упрощает выбор. Если вам необходима помощь в выборе оптимальной модели частотного преобразователя для управления асинхронным двигателем, вы всегда можете обратиться к сотрудникам нашей компании.
Если вам необходима помощь в выборе оптимальной модели частотного преобразователя для управления асинхронным двигателем, вы всегда можете обратиться к сотрудникам нашей компании.
вернуться в блог
Частотное регулирование скорости асинхронных двигателей
В промышленности свыше 60% электроэнергии потребляется асинхронными электроприводами – в насосных, компрессорных, вентиляционных и других установках. Это наиболее простой, а потому дешевый и надежный тип двигателя.Технологический процесс различных производств в промышленности требует гибкого изменения частоты вращения каких-либо исполнительных механизмов. Благодаря бурному развитию электронной и вычислительной техники, а также стремлению снизить потери электроэнергии появились устройства для экономного управления электродвигателями различного типа. В этой статье как раз и поговорим о том, как обеспечить максимально эффективное управление электроприводом. Работая в (группа компаний ЛАНИТ), я вижу, что наши заказчики всё больше внимания уделяют энергоэффективности
Большая часть электрической энергии, потребляемой производственными и технологическими установками, используется для выполнения какой-либо механической работы. Для приведения в движение рабочих органов различных производственных и технологических механизмов преимущественно используются асинхронные электрические двигатели с короткозамкнутым ротором (в дальнейшем именно о данном типе электродвигателя и будем вести повествование). Сам электродвигатель, его система управления и механическое устройство, передающее движение от вала двигателя к производственному механизму, образуют систему электрического привода.
Наличие минимальных потерь электроэнергии в обмотках за счет регулирования частоты вращения двигателя, возможность плавного пуска за счет равномерного увеличения частоты и напряжения — это основные постулаты эффективного управления электродвигателями.
Ведь ранее существовали и до сих пор существуют такие способы управления двигателем, как:
- реостатное регулирование частоты путем введения дополнительных активных сопротивлений в цепи обмоток двигателя, последовательно закорачиваемых контакторами;
- изменение напряжения на зажимах статора, при этом частота такого напряжения постоянна и равна частоте промышленной сети переменного тока;
- ступенчатое регулирование путем изменения числа пар полюсов статорной обмотки.

Но эти и другие способы регулирования частоты несут с собой главный недостаток — значительные потери электрической энергии, а ступенчатое регулирование по определению является недостаточно гибким способом.
Преимущества применения частотно регулируемых приводов для управления АД
- Облегчает пусковой режим привода.
- Позволяет двигателю долго работать, независимо от степени загрузки.
- Обеспечивает большую точность регулировочных операций.
- Позволяет контролировать состояние отдельных узлов в цепях промышленной электрической сети. За счет этого возможно вести постоянный учет количества времени, наработанного двигателями, чтобы потом оценивать их результативность.
- Наличие электронных узлов дает возможность диагностировать неисправности в работе двигателя дистанционно.
- К устройству можно подключать различные датчики обратной связи (давления, температуры). В результате скорость вращения будет стабильна при постоянно меняющихся нагрузках.

- При пропадании сетевого напряжения включается управляемое торможение и перезапуск.
- В результате:
- повышается уровень КПД за счет чего можно сэкономить порядка 30-35 % электроэнергии;
- количество и качество конечного продукта возрастает;
- снижается износ комплектующих механизмов;
- возрастает срок службы оборудования.
Изготовление своими руками
Если нет возможности, а также желания приобретать регулятор заводского типа, то можно собрать его своими руками. Хотя регуляторы типа » tda1085 » зарекомендовали себя очень хорошо. Для этого нужно детально ознакомиться с теорией и приступить к практике. Очень популярны схемы симисторного исполнения, в частности регулятор оборотов асинхронного двигателя 220в (схема 5). Сделать его несложно. Он собирается на симисторе ВТ138, хорошо подходящем для этих целей.
Схема 5 — Простой регулятор оборотов на симисторе.
Этот регулятор может быть использован и для регулировки оборотов двигателя постоянного тока 12 вольт, так как является довольно простым и универсальным. Обороты регулируются благодаря изменению параметров Р1, определяющему фазу входящего сигнала, который открывает переход симистора.
Обороты регулируются благодаря изменению параметров Р1, определяющему фазу входящего сигнала, который открывает переход симистора.
Принцип работы прост. При запуске двигателя происходит его затормаживание, индуктивность изменятся в меньшую сторону и способствует увеличению U в цепи «R2—>P1—>C2». При разряде С2 симистор открывается в течение некоторого времени.
Читать также: Какой просекатель для профиля гипсокартона лучше
Существует еще одна схема. Она работает немного по-другому: путем обеспечения хода энергии обратного типа, которое является оптимально выгодным. В схему включен довольно мощный тиристор.
Схема 6 — Устройство тиристорного регулятора.
Схема состоит из генератора сигнала управления, усилителя, тиристора и участка цепи, выполняющего функции стабилизатора вращения ротора.
Наиболее универсальной схемой является регулятор на симисторе и динисторе (схема 7). Он способен плавно убавить скорость вращения вала, задать реверс двигателю (изменить направление вращения) и понизить пусковой ток.
Принцип работы схемы:
- С1 заряжается до U пробоя динистора D1 через R2.
- D1 при пробитии открывает переход симистора D2, который отвечает за управление нагрузкой.
Напряжение при нагрузке прямо пропорционально зависит от частотной составляющей при открытии D2, зависящего от R2. Схема применяется в пылесосах. Она содержит универсальное электронное управление, а также способность простого подключения питания 380 В. Все детали следует расположить на печатной плате, изготовленной по лазерно-утюжной технологии (ЛУТ). Подробно с этой технологии изготовления плат можно ознакомиться в интернете.
Таким образом, при выборе регулятора оборотов электродвигателя возможна покупка заводского или изготовление своими руками. Самодельный регулятор сделать достаточно просто, так как при понимании принципа действия устройства можно с легкостью собрать его. Кроме того, следует соблюдать правила безопасности при осуществлении монтажа деталей и при работе с электричеством.
Плавная работа двигателя, без рывков и скачков мощности – это залог его долговечности. Для контроля этих показателей используется регулятор оборотов электродвигателя на 220В, 12 В и 24 В, все эти частотники можно изготовить своими руками или купить уже готовый агрегат.
Выполненные проекты
НПО «Винт», г. Москва. Подруливающие устройства для судового привода. Суда, оборудованные ими, получают большую маневренность при швартовке, проходе узкостей, тралении. Значительно снижается риск столкновения судов. Сокращается время разгрузки и погрузки, что дает экономию времени и денег.
ООО «Стройбезопасность», г. Тихорецк. Оснащение приводов башенных кранов. Это решение упрощает управление, дает возможность тонко регулировать скорость в большом диапазоне, приводит к отсутствию пусковых бросков тока.
ОАО «Тагмет», г. Таганрог. Рольганги щелевой закалочной печи. Обеспечивают точный догон трубы в зоне загрузки и отрыв на выходе и безаварийную работу оборудования. Главный экономический эффект применения частотных преобразователей — это повышение качества продукции.
ОАО «Ульяновский сахарный завод», р.п. Цильна, Ульяновская обл. Привод жом-пресса 500 кВт. Регулирует обороты по нагрузке: в результате стружка подается неравномерно и не происходит перебросов при этом поддерживается нужный уровень давления в шахте. Увеличивается срок службы оборудования, снижается количество аварийных остановок, упрощается обслуживание процесса.
МУП «Водоканал», г. Новочебоксарск. Автоматизированная система оперативного диспетчерского управления (АСОДУ) водоснабжением г. Новочебоксарска. Кроме снижения прямых затрат на энергоресурсы, снизилась аварийность и улучшилось качество обслуживания.
Основные виды однофазных электроприводов
Как упоминалось однофазный двигатель не может развивать пусковой момент, следствием чего становится невозможность его самостоятельного запуска. Для этого придумали несколько способов компенсации магнитного поля противоположного по знаку основному.
Двигатели с пусковой обмоткой
В данном способе пуска кроме основной обмотки Р, имеющей фазную зону 120, на статор наматывают еще и пусковую П, которая имеет фазную зону 60.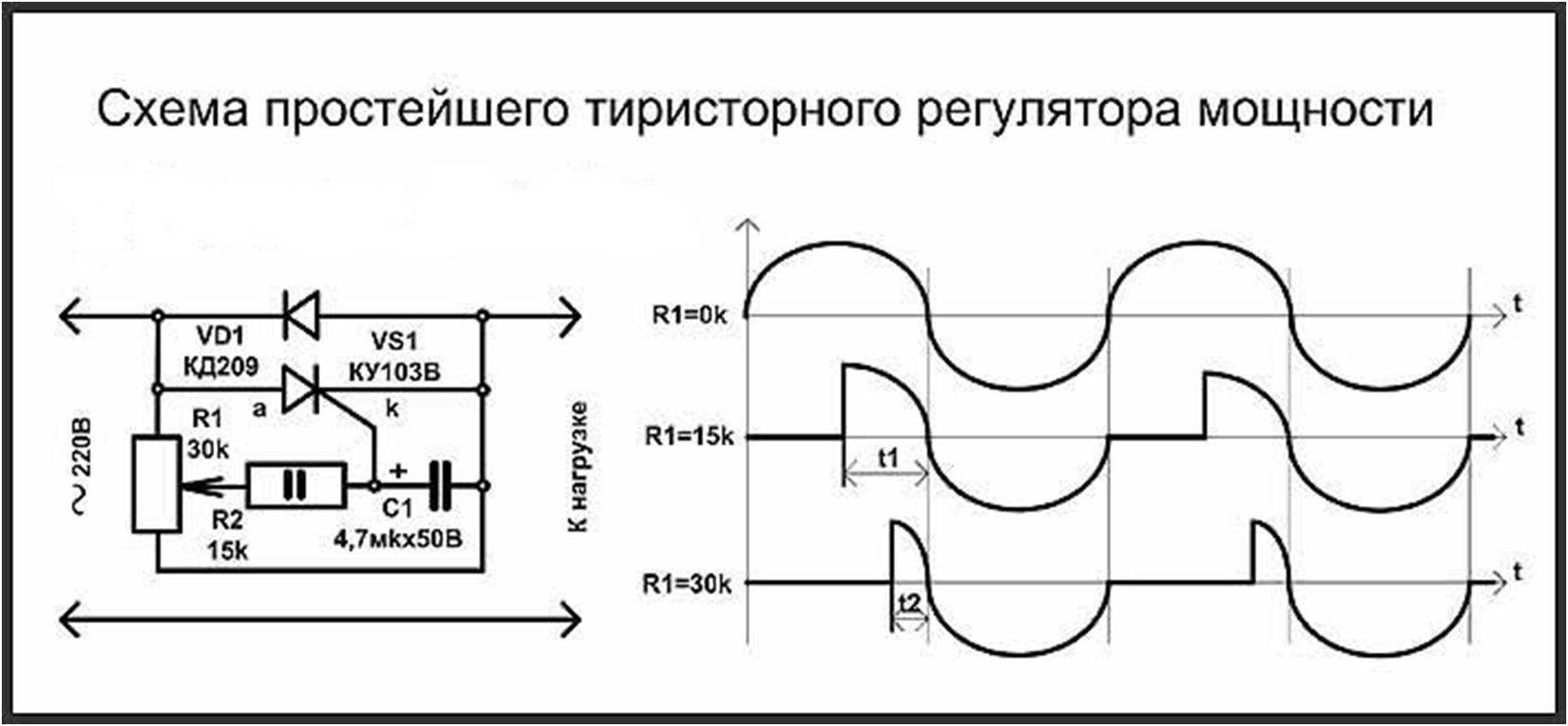 Также пусковая обмотка сдвигается относительно рабочей на 90 электрических. Для того, чтоб создать фазовый сдвиг между токами обмоток Iр и Iп последовательно в пусковую обмотку подключают элемент, приводящий к сдвигу фаз ψ (фазосдвигающее сопротивление Zп):
Также пусковая обмотка сдвигается относительно рабочей на 90 электрических. Для того, чтоб создать фазовый сдвиг между токами обмоток Iр и Iп последовательно в пусковую обмотку подключают элемент, приводящий к сдвигу фаз ψ (фазосдвигающее сопротивление Zп):
Где: а) схема подключения машины, б) векторные диаграммы при использовании различных сопротивлений.
Наилучшими условиями для пуска будет включения конденсатора в пусковую обмотку. Но поскольку емкость конденсатора довольно велика, соответственно и его стоимость и габариты тоже возрастают. Зачастую его применяют для получения повышенного момента для пуска. Пуск с помощью индуктивности имеет наихудшие показатели и в настоящее время не используется. Довольно часто могут применять запуск с помощью активного сопротивления, при этом пусковую обмотку делают с повышенным активным сопротивлением. После запуска электродвигателя пусковая обмотка отключается. Ниже показаны схемы включений и их пусковые характеристики:
Где: а,б) двигатели с пусковой обмоткой, в,г) конденсаторные
Конденсаторный двигатель
Данный тип электродвигателя имеет две рабочие обмотки, в одну из которых подключают рабочую емкость Ср. Данные обмотки сдвинуты относительно друг друга на 90 электрических и имеют фазные зоны тоже 90. При этом мощности обеих обмоток равны, но их токи и напряжения различны, также различны количества витков. Иногда величины конденсатора рабочего не достаточно для формирования нужного пускового момента, поэтому параллельно ему могут вешать пусковой, как это показано на рисунке выше. Схема приведена ниже:
Где: а) схема конденсаторного электродвигателя, б) его векторная диаграмма
В данном типе однофазных машин коэффициент мощности cosφ даже выше чем у трехфазных. Это объясняется наличием конденсатора. КПД такого электродвигателя выше, чем однофазного электродвигателя с пусковой обмоткой.
Методы настройки оборотов
Для предотвращения отрицательного влияния во время пуска нужно уменьшить обороты электродвигателя 220 в или 380 в. Существует несколько способов достижения этой цели:
- Изменение значения R цепи ротора.
- Изменение U в обмотке статора.
- Изменение частоты U.
- Переключение полюсов.
При изменении значения R роторной части при помощи дополнительных резисторов приводит к снижению частоты вращения, но в результате этого уменьшается мощность. Следовательно, получается значительная потеря электроэнергии. Этот тип регулирования следует применять для фазного ротора.
При изменении значений U на статорной катушке возможно механическое или электрическое управление частотой вращения ротора. В этом случае используется регулятор U. Использование такого способа позволяет применять его только при вентиляторном характере нагрузки (например, регулятор оборотов вентилятора 220в). Для всех остальных случаев применяют трехфазные автоматические трансформаторы, позволяющие плавно изменять значения U, или тиристорные регуляторы.
Читать также: Импульсный тахометр для бензопилы
Исходя из формулы зависимости частоты вращения от частоты питающего U можно производить регулирование количества оборотов ротора. Частота вращающегося магнитного поля статора вычисляется по формуле: Nст = 60 * f /p (f — частота тока питающей сети, p — число пар полюсов). Этот способ обеспечивает возможность плавного регулирования частоты вращения роторной части. Для получения высокого коэффициента полезного действия нужно изменять частоту и U. Этот способ является оптимальным для двигателей с короткозамкнутым ротором, так как потери мощности минимальны. Существует два метода изменения количества пар полюсов:
- В статор (в пазы) нужно уложить 2 обмотки с различным числом p.
- Обмотка состоит из двух частей, соединенных параллельно или последовательно.
Основным недостатком этого метода является поддержание ступенчатого характера изменения частоты электромотора с короткозамкнутым ротором.
Структура частотного регулятора
Все современные преобразователи частоты построены на принципе так называемого двойного преобразования. То есть, переменный ток преобразуется в постоянный через неуправляемый выпрямитель и фильтр. Далее, через импульсный инвертор (он трехфазный) происходит обратное преобразование тока постоянного в ток переменный. Инвертор сам состоит из шести силовых ключей (транзисторных). Так вот каждая обмотка электрического движка подключается к определенным ключам выпрямителя (положительному или отрицательному). Именно инвертор изменяет частоту напряжения, которое прикладывается к статорным обмоткам. По сути, именно через него происходит частотное регулирования электродвигателя.
В этом приборе на выходе устанавливаются силовые транзисторы. Они выполняют роль ключей. Если сравнивать их с тиристорами, то необходимо отметить, что первые вырабатывают сигнал в виде синусоиды. Именно данная форма создает минимальные искажения.
Преобразователь частоты
Ответ на главный вопрос жизни, вселенной и бездатчикового электропривода — Чтобы избежать этих негативных последствий, при уменьшении частоты приходится снижать и эффективное значение напряжения на обмотках двигателя.
Функционирование без датчика положения. Таким образом, амплитуда отрицательных и положительных импульсов напряжения всегда соответствует половине напряжения промежуточной цепи. Способ векторов точнее и эффективнее.
Выходные сигналы с элементов DD3. Данные документируются протоколом обмена и используются пользователями, создающими программы управления для электронной техники и контроллеров.
Использование в работе частотника дает возможность работать двигателю без перерыва, экономично. Большая часть экономической эффективности заключается в возможности регулирования при помощи частотного преобразователя технологических характеристик процессов, температуры, давления, скорости движения, скорости подачи главного движения.
Данные параметры также регулируются широтно-импульсной модуляцией, а сама ширина импульсов модулируется по синусоидальному закону. Промежуточная цепь одного из трех типов: a преобразующая напряжение выпрямителя в постоянный ток. Примечание: для большинства приложений использование только пропорциональной и интегральной составляющей без использования дифференциальной составляющей даёт хорошие результаты. Такой вид управления инвертором называется амплитудно-импульсной модуляцией АИМ.
Такие преобразователи используются в мегаваттном диапазоне мощности для формирования низкочастотного питающего напряжения непосредственно из сети частотой 50 Гц, при этом их максимальная выходная частота составляет около 30 Гц. Все это управляется при помощи двух кнопок и одного переключателя, который изменяет направление вращения вала. Резисторы, соединил параллельно по кОм с помощью затворных проходных конденсаторов, позади платы их напаял. А удерживание инициирует дальнейший разгон до 50 Гц в течении приблизительно 2 секунд. SFAVM SFAVM — пространственно-векторный способ модуляции, который позволяет случайным образом, но скачкообразно изменять напряжение, амплитуду и угол инвертора в течение времени коммутации.
В описываемой схеме вполне возможно применить драйверы IR или IR В каждом из проектов имеются 7 файлов: mckits.
Механические устройства не могут выполнить такие функции. Также происходит насыщение магнитопровода статора. Моторы переделывают электроэнергию в механическое движение. Катушка индуктивности преобразует изменяющееся напряжение выпрямителя в изменяющийся постоянный ток. Самодельный частотный преобразователь 220-380V собственной сборки
Схема прямого матричного преобразователя Непрямой матричный преобразователь indirect matrix converter состоит из двунаправленного трехфазного выпрямителя, виртуального звена постоянного тока и трехфазного инвертора.
Диоды позволяют току протекать только в одном направлении: от анода А к катоду К. И они творят революцию — успешно перевели на веб-платформу комплекс программных средств для разработки электрических принципиальных схем и печатных плат.
Состоит из выпрямителя и фильтрационных устройств.
Эти значения времени коммутации должны устанавливаться таким образом, чтобы допускать только минимум высших гармоник. Печатная плата комплекта разработчика устройств управления электродвигателями Есть особенность, которую должен учитывать разработчик устройств управления электродвигателями. В наше время существует несколько компоновок инверторов с управляемыми ключами: запираемые GTO тиристоры; биполярные IGBT-транзисторные ключи с затвором.
Выходное напряжение является результатом комбинации сегментов входного напряжения в котором основная гармоника следует за опорным сигналом. Транзистор-прерыватель управляет напряжением промежуточной цепи Фильтр промежуточной цепи сглаживает прямоугольное напряжение после прерывателя. Три проекта написаны так, чтобы в режиме сравнения файлов по содержимому однозначно идентифицировалось все, что с ней связано параметры, межблочные связи, расчетный код.
В состав преобразователей частоты входят четыре основных элемента: Рис. Нажимаем кнопку Event в окне программы. Аварийные ситуации при этом сводятся на нет.
Электрическая принципиальная схема частотного преобразователя
Частота задается конденсатором C1, регулировка частоты осуществляется переменным резистором R2. Проекты пошаговой разработки программного кода цифровой системы управления В дополнение к аппаратной части, инженеру предоставлен комплект проектов для пошаговой разработки программного кода векторной системы управления.
Задача перевода объекта из одного состояния в другое решается «программной машиной состояний». Расчёт производится по значению ошибки управления — расхождению между заданным значением и значением сигнала обратной связи обычно показания датчика какого-либо технологического параметра. Электрическая принципиальная схема комплекта разработчика устройств управления электродвигателями В нижней части схемы изображены импульсный преобразователь напряжения и линейные стабилизаторы, питающие фрагменты схемы. Основным различием способов являются критерии, которые используются при вычислении значений активного тока, тока намагничивания магнитного потока и крутящего момента. Частотник для регулирования оборотов трёхфазного двигателя
Источник
Отрасли применения ЧРП
Список отраслей получается обширным, сложнее найти отрасль, где бы не применялись ЧП:
Нефтедобыча и переработка
: насосное оборудование, привод аппаратов воздушного охлаждения (АВО) и градирен, комплексная автоматизация различных технологических линий.
Металлургия
: приводы рольгангов, конвейеров, прокатных станов, наматывающих устройств волочильных станов, насосов, вентиляторов.
Машиностроение
: привод обрабатывающих станков, насосы, конвейерные линии, полиграфические машины.
Горнодобывающее и обогатительное производство
: дробилки, мешалки, конвейеры, песковые и пульповые насосы.
Химическая промышленность
: насосы, мешалки, грануляторы, экструдеры, центрифуги, приводы дымососов и вентиляторов, АСУ.
Пищевая промышленность
: грануляторы, экструдеры, мельницы, дробилки, куттеры, жом-прессы, этикетировочные аппараты, конвейеры, технологические линии, насосы, вентиляторы.
ЖКХ
: различное насосное оборудование, АСУ.
Стройкомплекс
: краны, подъемные механизмы.
Транспорт
: судовой привод, электротранспорт.
Векторное управление с обратной связью
Векторное управление с обратной связью использует тот же алгоритм управления, что и ВУ без обратной связи. Основное различие заключается в наличии энкодера, что дает возможность частотно-регулируемому электроприводу развивать 200% пусковой момент при скорости 0 об/мин. Этот пункт просто необходим для создания начального момента при трогании с места лифтов, кранов и других подъемных машин, чтоб не допустить просадки груза.
Наличие датчика обратной связи по скорости позволяет увеличить время отклика системы более 50 Гц, а также расширить диапазон регулирования скорости до 1:1500. Также наличие обратной связи позволяет управлять не скоростью электрической машиной, а моментом
В некоторых механизмах именно значение момента имеет большую важность. Например, мотальная машина, механизмы закупорки и другие
В таких устройствах необходимо регулировать момент машины.
Схема регулятора скорости трехфазного асинхронного двигателя
В этом посте мы обсудим создание простой схемы регулятора скорости трехфазного асинхронного двигателя, которая также может применяться для однофазного асинхронного двигателя или буквально для любого типа двигателя переменного тока.
Когда доходит до управления скоростью асинхронных двигателей, обычно используются матричные преобразователи, включающие множество сложных каскадов, таких как LC-фильтры, двунаправленные массивы переключателей (с использованием IGBT) и т. Д.
Все они используются для достижения в конечном итоге прерванный сигнал переменного тока, рабочий цикл которого можно регулировать с помощью сложной схемы микроконтроллера, что в конечном итоге обеспечивает необходимое управление скоростью двигателя.
Однако мы можем поэкспериментировать и попытаться осуществить регулирование скорости трехфазного асинхронного двигателя с помощью гораздо более простой концепции, используя усовершенствованные ИС оптопары детектора перехода через нуль, силовой симистор и схему ШИМ.
Использование детектора перехода через ноль Оптопара
Благодаря серии оптопар MOC, которые сделали схемы управления симисторами чрезвычайно безопасными и простыми в настройке, а также обеспечивают беспроблемную интеграцию ШИМ для предполагаемых элементов управления.
В одном из своих предыдущих постов я обсуждал простую схему контроллера двигателя с плавным пуском с ШИМ, в которой реализована микросхема MOC3063 для обеспечения эффективного плавного пуска подключенного двигателя.
Здесь мы также используем идентичный метод для обеспечения соблюдения предложенной схемы регулятора скорости трехфазного асинхронного двигателя, на следующем изображении показано, как это можно сделать:
На рисунке мы видим три идентичных каскада оптопары MOC, сконфигурированных в их стандартном симисторе. режим регулятора, а входная сторона интегрирована с простой схемой ШИМ IC 555.
Три контура MOC сконфигурированы для обработки входного трехфазного переменного тока и подачи его на подключенный асинхронный двигатель.
Вход ШИМ на стороне управления изолированными светодиодами оптического блока определяет коэффициент прерывания трехфазного входа переменного тока, который обрабатывается MOC ICS.
Использование ШИМ-контроллера IC 555 (переключение при нулевом напряжении)
Это означает, что, регулируя потенциометр ШИМ, связанный с микросхемой 555, можно эффективно управлять скоростью асинхронного двигателя.
Выход на его выводе №3 имеет переменный рабочий цикл, который, в свою очередь, соответственно переключает выходные симисторы, что приводит либо к увеличению среднеквадратичного значения переменного тока, либо к его уменьшению.
Увеличение RMS с помощью более широких PWM позволяет получить более высокую скорость двигателя, в то время как уменьшение RMS переменного тока с помощью более узких PWM производит противоположный эффект, то есть вызывает пропорциональное замедление двигателя.
Вышеупомянутые функции реализованы с большой точностью и безопасностью, поскольку ИС имеют множество внутренних сложных функций, специально предназначенных для управления симисторами и тяжелыми индуктивными нагрузками, такими как асинхронные двигатели, соленоиды, клапаны, контакторы, твердотельные реле и т. Д.
IC также обеспечивает идеально изолированную работу для каскада постоянного тока, что позволяет пользователю выполнять настройки, не опасаясь поражения электрическим током.
Этот принцип также можно эффективно использовать для управления скоростью однофазного двигателя, используя одну MOC IC вместо 3.
Конструкция фактически основана на теории пропорционального по времени симистора. Верхняя схема ШИМ IC555 может быть отрегулирована для получения 50% рабочего цикла при гораздо более высокой частоте, в то время как нижняя схема ШИМ может использоваться для реализации операции управления скоростью асинхронного двигателя посредством регулировки соответствующего потенциометра.
Рекомендуется, чтобы эта микросхема 555 имела относительно более низкую частоту, чем верхняя схема микросхемы 555. Это можно сделать, увеличив емкость конденсатора на выводе 6/2 примерно до 100 нФ.
ПРИМЕЧАНИЕ: ДОБАВЛЕНИЕ ПОДХОДЯЩИХ ИНДУКТОРОВ ПОСЛЕДОВАТЕЛЬНО С ФАЗОВЫМИ ПРОВОДАМИ МОЖЕТ Существенно улучшить ХАРАКТЕРИСТИКИ УПРАВЛЕНИЯ СКОРОСТЬЮ СИСТЕМЫ.Datasheet для MOC3061
Предполагаемая форма сигнала и управление фазой с использованием вышеуказанной концепции:
Вышеописанный метод управления трехфазным асинхронным двигателем на самом деле довольно груб, поскольку он не имеет контроля В / Гц .
Он просто использует включение / выключение сети с разной скоростью для выработки средней мощности двигателя и управления скоростью, изменяя этот средний переменный ток двигателя.
Представьте, что вы включаете / выключаете двигатель вручную 40 или 50 раз в минуту. Это приведет к тому, что ваш двигатель замедлится до некоторого относительного среднего значения, но будет двигаться непрерывно. Вышеупомянутый принцип работает точно так же.
Более технический подход заключается в разработке схемы, которая обеспечивает надлежащий контроль соотношения В / Гц и автоматически регулирует его в зависимости от скорости скольжения или любых колебаний напряжения.
Для этого мы в основном используем следующие этапы:
- Н-мостовой или полный мост IGBT-драйвер Схема
- Трехфазный генераторный каскад для питания полной мостовой схемы
- ШИМ-процессор В / Гц
Использование полного моста Схема управления IGBT
Если процедуры настройки вышеупомянутой конструкции на основе симистора выглядят устрашающими для вас, можно попробовать следующее управление скоростью асинхронного двигателя на основе полномостового ШИМ:
В схеме, показанной на приведенном выше рисунке, используется один полный кристалл. -мостовой драйвер IC IRS2330 (последняя версия — 6EDL04I06NT), который имеет все встроенные функции для обеспечения безопасной и безупречной работы трехфазного двигателя.
ИС требуется только синхронизированный трехфазный логический вход через его выводы HIN / LIN для генерации необходимого трехфазного колебательного выхода, который, в конечном итоге, используется для работы полной мостовой IGBT-сети и подключенного трехфазного двигателя.
ШИМ-инжектор с регулировкой скорости реализуется через 3 отдельных полумостовых каскада драйверов NPN / PNP, управляемых с помощью SPWM-питания от генератора ШИМ IC 555, как показано в наших предыдущих разработках. Этот уровень ШИМ может в конечном итоге использоваться для управления скоростью асинхронного двигателя.
Прежде чем мы изучим фактический метод управления скоростью для асинхронного двигателя, давайте сначала разберемся, как автоматическое регулирование В / Гц может быть достигнуто с помощью нескольких схем IC 555, как описано ниже.
Схема автоматического ШИМ-процессора В / Гц (Замкнутый контур)
В приведенных выше разделах мы изучили конструкции, которые помогут асинхронному двигателю двигаться со скоростью, указанной производителем, но он не будет регулироваться в соответствии с постоянным соотношением В / Гц, если не будет следующая ШИМ процессор интегрирован с входным каналом H-Bridge PWM.
Вышеупомянутая схема представляет собой простой генератор ШИМ, использующий пару IC 555. IC1 генерирует частоту ШИМ, которая преобразуется в треугольные волны на выводе №6 IC2 с помощью R4 / C3.
Эти треугольные волны сравниваются с синусоидальной пульсацией на выводе № 5 микросхемы IC2. Эти пульсации образца получаются путем преобразования трехфазной сети переменного тока в пульсации переменного тока 12 В и подаются на вывод № 5 микросхемы IC2 для необходимой обработки.
Путем сравнения двух сигналов, SPWM соответствующего размера генерируется на выводе № 3 IC2, который становится управляющим ШИМ для сети H-моста.
Как работает схема В / Гц
При включении питания конденсатор на выводе №5 начинает с передачи нулевого напряжения на выводе №5, что вызывает наименьшее значение SPWM в Н-мостовой схеме, которая, в свою очередь, включает асинхронный двигатель для запуска с медленным плавным пуском.
По мере зарядки этого конденсатора потенциал на выводе № 5 повышается, что пропорционально увеличивает SPWM и позволяет двигателю постепенно набирать скорость.
Мы также можем видеть цепь обратной связи тахометра, которая также интегрирована с контактом № 5 микросхемы IC2.
Этот тахометр контролирует скорость ротора или скорость скольжения и генерирует дополнительное напряжение на выводе № 5 IC2.
Теперь, когда скорость двигателя увеличивается, скорость скольжения пытается синхронизироваться с частотой статора, и в процессе она начинает набирать скорость.
Это увеличение индукционного скольжения пропорционально увеличивает напряжение тахометра, что, в свою очередь, заставляет IC2 увеличивать выходной сигнал SPWM, что, в свою очередь, дополнительно увеличивает скорость двигателя.
Вышеупомянутая регулировка пытается поддерживать отношение В / Гц на довольно постоянном уровне до тех пор, пока, наконец, SPWM от IC2 не сможет увеличиваться дальше.
В этот момент скорость скольжения и скорость статора достигают установившегося состояния, и это поддерживается до тех пор, пока входное напряжение или скорость скольжения (из-за нагрузки) не изменятся. В случае их изменения схема процессора V / Hz снова вступает в действие и начинает регулировать соотношение для поддержания оптимального отклика скорости асинхронного двигателя.
Тахометр
Цепь тахометра также может быть дешево построена с использованием следующей простой схемы и интегрирована с описанными выше этапами схемы: eb достигается за счет интеграции обратной связи тахометра в цепь автоматического регулируемого контроллера SPWM.
Теперь давайте узнаем, как можно управлять скоростью асинхронного двигателя, изменяя частоту, что в конечном итоге заставит SPWM упасть и поддерживать правильное соотношение В / Гц.
На следующей схеме поясняется каскад управления скоростью:
Здесь мы можем увидеть схему 3-фазного генератора, использующую микросхему IC 4035, частоту сдвига фазы которой можно изменять, изменяя тактовый сигнал на его выводе №6.
Трехфазные сигналы подаются на логические элементы 4049 IC для создания требуемых HIN, LIN-каналов для полной мостовой драйверной сети.
Это означает, что, соответствующим образом изменяя тактовую частоту IC 4035, мы можем эффективно изменить рабочую трехфазную частоту асинхронного двигателя.
Это реализуется через простую нестабильную схему IC 555, которая подает регулируемую частоту на вывод №6 микросхемы IC 4035 и позволяет регулировать частоту с помощью подключенного потенциометра 100K. Конденсатор C необходимо рассчитать таким образом, чтобы регулируемый диапазон частот соответствовал характеристикам подключенного асинхронного двигателя.
Когда потенциометр частоты изменяется, эффективная частота асинхронного двигателя также изменяется, что соответственно изменяет скорость двигателя.
Например, когда частота уменьшается, вызывает снижение скорости двигателя, что, в свою очередь, вызывает пропорциональное снижение напряжения на выходе тахометра.
Это пропорциональное уменьшение выходного сигнала тахометра заставляет SPWM сужаться и, таким образом, пропорционально снижает выходное напряжение на двигатель.
Это действие, в свою очередь, обеспечивает поддержание соотношения В / Гц при управлении скоростью асинхронного двигателя посредством управления частотой.
Предупреждение. Вышеупомянутая концепция основана только на теоретических предположениях, действуйте с осторожностью.
Если у вас есть какие-либо сомнения относительно конструкции контроллера скорости трехфазного асинхронного двигателя, вы можете опубликовать то же самое в своих комментариях.
(PDF) Сравнение различных обмоток с резьбой для регулировки потока в асинхронных двигателях
FERREIRA et al.: СРАВНЕНИЕ РАЗЛИЧНЫХ НАПРАВЛЯЮЩИХ ОБМОТКОВ ДЛЯ РЕГУЛИРОВКИ ПОТОКА В ИНДУКЦИОННЫХ ДВИГАТЕЛЯХ 391
улучшение их КПД при частичной нагрузке и коэффициента мощности, и, при необходимости
, обеспечение номинального крутящего момента, что особенно интересно, если двигатель длительное время работает с нагрузкой ниже
, чем 35–45%, и короткие периоды с нагрузкой, близкой к 100%.
Решения на основе двух последовательно соединенных по фазе цепей с номиналом
(случаи C и D) лучше, чем решения на основе «коэффициента обмотки»
(случаи A и B) для целей регулировки потока
из-за превосходная производительность в режиме высокого потока.Соотношение
низкого / высокого потока можно легко установить путем правильного выбора
баланса числа витков в обеих отдельных цепях. Решения
, основанные на соединении звездой обмотки между двумя катушками
набора каждой фазы (случаи E и E ∗) также представляют интерес, с характеристиками
, аналогичными случаям C и D, но с немного более высоким значением
.пространственных гармоник в ММП воздушного зазора. Для соединения с высокой пропускной способностью
Case E ∗ предлагает немного более высокую эффективность, чем Case
E.
В режиме высокого потока обмотка случая D дает в √3 раза
более низкие джоулевые потери в обмотке, чем обмотка случая C, но в √3 раза
более высокие потери в джоулях обмотки, чем обычные Y / Dwinding.
Обмотки с ответвлениями также могут применяться для двигателей с постоянным током
с линейным пуском для повышения эффективности и повышения коэффициента мощности при малых нагрузках [17] и даже
, когда запуск должен быть принудительным, чтобы компенсировать тормозной момент
из-за магнитов. . Иногда это делается путем соединения
последовательных цепей параллельно (количество витков фазы
уменьшено вдвое) для увеличения потока воздушного зазора, для чего требуется более двух контакторов
.
БЛАГОДАРНОСТЬ
Авторы хотели бы поблагодарить г-на Тьяго Л. Ф. Круза,
M.Sc. Студент Политехнического института Коимбры, за
выполнилэкспериментальных моторных испытаний.
ССЫЛКИ
[1] ABB: «Решения для запуска двигателей — Руководство по применению», ABB Entrelec,
1SBC101001C0202, Отпечатано во Франции, 2009 г.
[2] Вращающиеся электрические машины — Часть 12: Пусковые характеристики одиночных —
3-фазные асинхронные двигатели с короткозамкнутым ротором, скорость, IEC 60034–12 Ed.2.0, (2002) ,.
[3] Низковольтные распределительные устройства — Часть 4–1: Контакторы и пускатели двигателей
— Электромеханические контакторы и пускатели двигателей,
IEC60947–4–1, Ред. 3.1, (2002).
[4] Ф. Дж. Т. Э. Феррейра и А. Т. де Алмейда, «Метод полевой оценки
соединения обмотки статора трехфазных асинхронных двигателей для максимизации КПД и коэффициента мощности
», IEEE Trans. Energy Convers., Т. 21, нет. 2,
с.370–379, июнь 2006 г.
[5] FJTE Ferreira и AT de Almeida, «Новый многопоточный, трехфазный,
-фазный, с короткозамкнутым ротором, индукционный двигатель с короткозамкнутым ротором для повышения эффективности и максимального коэффициента мощности.
imization», IEEE Trans . Energy Convers., Т. 23, нет. 1, стр. 101–109,
март 2008 г.
[6] М. Систелекан, FJTE Феррейра и М. Попеску, «Трехфазные машины переменного тока с регулируемым потоком
с комбинированной многоступенчатой обмоткой звезда-треугольник соединения », IEEE Trans.Energy Convers., Т. 25, нет. 2, pp. 348–355, Jun.
2010.
[7] Д. Г. Доррелл и Ф. Дженсен, «Моделирование асинхронных двигателей с расщепленной фазой с обмотками
с центральным отводом и падениями асинхронного момента», IEEE Trans. Инд.
Заявление, т. 45, нет. 1. С. 168–177, янв. / Февр. 2009.
[8] П. Л. Алджер, «Расчет производительности для пуска по частям обмотки трехфазных двигателей
», AIEE Trans., Vol. 75, нет. 3, Часть III, стр. 1535–1543, февраль 1957.
[9] J.Дж. Куртин, «Десять частичных обмоток в образце 4-полюсного асинхронного двигателя
», AIEE Trans., Вып. 74, нет. 3, Часть. III, стр. 1248–1254, декабрь 1955.
[10] К. К. Раджараман, «Теория и конструкция запуска частичной обмотки», IEEE
Trans. Конв. Энергии, т. 14, вып. 1, стр. 31–36, март 1999 г.
[11] М. В. Систелекан, М. А. Сарбу и Б. Косан, «Оптимизация линии тягового двигателя IN-
, запускаемой с использованием параллельных трактов с частичной обмоткой», в Proc.
Inter.Конф. OPTIM, Брашов, Румыния, май 2004 г., стр. 334–339.
[12] А. Стермецки, И. Тикар, И. Заградисник и П. Китак, «Конструкция
части обмотки асинхронного двигателя на основе МКЭ для снижения пускового тока», IEEE
Trans. Магн., Т. 42, нет. 4, pp. 1299–1302, Apr. 2006.
[13] М. В. Цистелекан, Х. Б. Косан и М. Попеску, «Пуск с частичной обмоткой
, усовершенствование трехфазного асинхронного двигателя с короткозамкнутым ротором», в Proc. 8-я
Интер. Symp. Adv.Электромех. Motion Syst. Elect, Drives Joint Symp.,
Conf., 2009, стр. 1–6.
[14] М. Э. Эль-Хавари, Принципы электрических машин с силовой электроникой
Приложения. Энглвуд Клиффс, Нью-Джерси, США: Прентис Холл-Рестон, 1986.
[15] Э. Леви и М. Панцер, Электромеханическое преобразование энергии. Малабар,
,, Флорида, США: Robert E Krieger Publishing Co., 1982.
[16] М. Чирринсионе, М. Пуччи, С. Серпорта и А. Мирауи, «Эффекты прорезания ротора
в асинхронных двигателях: космос -векторное моделирование, конечно-элементный анализ и эксперименты », в Proc.IEEE Annu. Ind. Electron. Conf., Орландо,
,, Флорида, США, 10–13 ноября 2008 г., стр. 1361–1367.
[17] Ф. Феррейра, Г. Баоминг и А. де Алмейда, «Управление режимом соединения обмотки статора
в двигателях с постоянными магнитами с линейным пуском для повышения их эффективности и коэффициента мощности
», IEEE Trans. Energy Convers., Т. 28, вып. 3,
pp. 523–534, сентябрь 2013 г.
[18] М. Райн, Г. Хан и Н. Юн, «Метод определения уровней напряжения
относительно ALT с помощью оптического датчика температуры», Дж.Избрать. Англ.
Технол., Т. 3, вып. 2, pp. 184–191, 2008.
Фернандо Дж. Т. Э. Феррейра (SM’09) получил степень доктора философии
. степень в области электротехники Университета
Коимбры, Коимбра, Португалия.
В настоящее время он является профессором кафедры электротехники
Политехнического института
Коимбры (IPC / ISEC), Коимбра, Португалия. С
1998 г. он работал научным сотрудником в Институте
систем и робототехники Университета Коимбры (ISR-
UC), Коимбра, Португалия, работая в области двигателей и приводов
.Он участвовал в нескольких проектах Европы
, связанных с технологиями энергоэффективных двигателей
. Он является соавтором более 50 статей, опубликованных в международных журналах, а также отчетов конференций и представленных на встречах.
Проф. Феррейра был удостоен награды за лучшую работу на технической конференции IEEE / IAS
в 2001 году по промышленным и коммерческим энергетическим системам и награды
за лучшую презентацию (за техническую компетентность, продемонстрированную в стендовой презентации
. ) на выставке Inter.Конференция по электрическим машинам.
Михаил В. Цистелекан (M’94) получил докторскую степень de-
gree в области электрических машин и приводов в Университете «Политех-
nica» Бухареста, Бухарест, Румыния,
в 1990 году.
Он работал старшим научным сотрудником в Исследовательском институте электрических машин
(ICPE-
ME) в Бухаресте, а сейчас на пенсии. Его основные области интересов
включают оптимизацию конструкции индукционных машин
, электрических машин с постоянными магнитами
и электрических приводов, будучи автором или соавтором более 30 румынских патентов, около 50
статьи, опубликованные в реферируемых журналах и на международных конференциях, и три учебника
.
Проф. Систелекан был удостоен награды за лучшую презентацию плаката (
— техническая компетентность, показанная в постерной презентации) на выставке Inter 2010 года.
Конференция по электрическим машинам.
Анибал Т. де Алмейда (SM’03) получил докторскую степень.
степень в области электротехники от Imperial Col-
lege, Лондонский университет, Лондон, Великобритания
В настоящее время он является профессором кафедры электротехники и компьютеров
Университета
Коимбры, Коимбра, Португалия.Он является соавтором
шести книг по энергоэффективности и более 200
статей, опубликованных в международных журналах,
отчетов и представленных на встречах. Он координировал
восьми европейских проектов, связанных с энергетикой
эффективных моторных технологий.
Проф. Де Алмейда был удостоен награды за лучшую работу на Технической конференции по промышленным и коммерческим системам питания IEEE / IAS 2001 г.
.
Максимальные и минимальные значения напряжения двигателя
Экономические потери от преждевременного отказа двигателя огромны.В большинстве случаев цена самого двигателя тривиальна по сравнению со стоимостью внеплановых остановок процессов. Как высокое, так и низкое напряжение могут вызвать преждевременный отказ двигателя, равно как и дисбаланс напряжений. Здесь мы рассмотрим влияние низкого и высокого напряжения на двигатели и соответствующие изменения производительности, которые вы можете ожидать при использовании напряжения, отличного от указанного на паспортной табличке.
Воздействие низкого напряжения. Если вы подвергнете двигатель воздействию напряжения ниже номинального, указанного на паспортной табличке, некоторые характеристики двигателя изменятся незначительно, а другие резко изменятся.Чтобы приводить в действие фиксированную механическую нагрузку, подключенную к валу, двигатель должен потреблять фиксированное количество энергии от линии. Количество потребляемой двигателем мощности примерно соответствует току напряжения 2 (в амперах). Таким образом, когда напряжение становится низким, ток должен увеличиваться, чтобы обеспечить такое же количество энергии. Увеличение тока представляет опасность для двигателя только в том случае, если этот ток превышает номинальный ток двигателя, указанный на паспортной табличке. Когда сила тока превышает номинальное значение, указанное на паспортной табличке, в двигателе начинает накапливаться тепло. Без своевременной коррекции это тепло приведет к повреждению двигателя.Чем больше тепла и чем дольше на него воздействуют, тем больше повреждение мотора.
Существующая нагрузка является основным фактором при определении того, насколько снижение напряжения питания может выдержать двигатель (см. Врезку ниже). Например, давайте посмотрим на двигатель с небольшой нагрузкой. Если напряжение уменьшается, ток увеличивается примерно в той же пропорции, что и напряжение. Например, снижение напряжения на 10% приведет к увеличению силы тока на 10%. Это не повредит двигатель, если ток будет ниже значения, указанного на паспортной табличке.
А что, если у этого двигателя большая нагрузка? В этом случае у вас уже есть большой ток, поэтому напряжение уже ниже, чем было бы без нагрузки. Возможно, вы даже приблизитесь к нижнему пределу напряжения, указанному на паспортной табличке. Когда происходит снижение напряжения, ток возрастает до нового значения, которое может превышать номинальный ток при полной нагрузке.
Низкое напряжение может привести к перегреву, сокращению срока службы, снижению пусковой способности и уменьшению момента подъема и отрыва. Пусковой крутящий момент, крутящий момент и крутящий момент асинхронных двигателей изменяются в зависимости от приложенного напряжения в квадрате.Таким образом, 10% -ное снижение напряжения, указанного на паспортной табличке (от 100% до 90%, от 230 В до 207 В), уменьшит пусковой крутящий момент, крутящий момент отжима и крутящий момент отрыва в 0,92,9 раза. Полученные значения составят 81% от значений полного напряжения. При напряжении 80% результат будет 0,82,8 или значение 64% от полного значения напряжения. Что это означает в реальной жизни? Что ж, теперь вы можете понять, почему трудно запустить «трудно запускаемые» нагрузки, если напряжение оказывается низким. Точно так же крутящий момент двигателя будет намного ниже, чем при нормальном напряжении.
На слабо нагруженных двигателях с легко запускаемыми нагрузками снижение напряжения не будет иметь какого-либо заметного эффекта, за исключением того, что оно может помочь снизить потери при небольшой нагрузке и повысить эффективность в этих условиях. Это принцип, лежащий в основе некоторого дополнительного оборудования, предназначенного для повышения эффективности.
Воздействие высокого напряжения. Люди часто делают предположение, что, поскольку низкое напряжение увеличивает силу тока на двигателях, высокое напряжение должно уменьшать потребляемую силу тока и нагрев двигателя.Это не тот случай. Высокое напряжение на двигателе приводит к насыщению магнитной части двигателя. Это приводит к тому, что двигатель потребляет чрезмерный ток, пытаясь намагнитить утюг за пределы точки, в которой намагничивание является практичным.
Двигатели допускают некоторое изменение напряжения выше расчетного. Однако, если напряжение превышает расчетное, сила тока возрастет, что приведет к соответствующему увеличению нагрева и сокращению срока службы двигателя.
Например, производители ранее рассчитывали двигатели на 220/440 В с диапазоном допуска 510%.Таким образом, допустимый диапазон напряжения на высоковольтных соединениях составляет от 396 до 484 В. Несмотря на то, что это так называемый диапазон допуска, наилучшие характеристики будут достигнуты при номинальном напряжении. Крайние концы (высокие или низкие) создают ненужную нагрузку на двигатель.
Не попадитесь в ловушку, думая, что с вами все в порядке, только потому, что ваше напряжение питания находится в этих пределах. Назначение этих диапазонов — приспособиться к обычным почасовым колебаниям напряжения на заводе. Постоянная работа на высоких или низких предельных значениях сокращает срок службы двигателя.
Такая чувствительность к напряжению характерна не только для двигателей. Фактически, колебания напряжения влияют на другие магнитные устройства аналогичным образом. Соленоиды и катушки, которые вы найдете в реле и пускателях, лучше переносят низкое напряжение, чем высокое. Это также верно для балластов в люминесцентных, ртутных и натриевых осветительных приборах высокого давления. И это касается трансформаторов всех типов. Лампы накаливания особенно чувствительны к высокому напряжению. Увеличение напряжения на 5% сокращает срок службы лампы на 50%.Повышение напряжения на 10% выше номинального сокращает срок службы лампы накаливания на 70%.
В целом, для оборудования определенно будет лучше, если вы измените ответвления на входных трансформаторах, чтобы оптимизировать напряжение в производственном цехе до уровня, близкого к номинальным характеристикам оборудования. На старых заводах вам, возможно, придется пойти на некоторые компромиссы из-за различий в стандартах для старых двигателей (220/440 В) и более новых стандартов «Т-образная рама» (230/460 В). Напряжение посередине этих двух напряжений (что-то вроде 225 В или 450 В) обычно дает наилучшие общие характеристики.Высокое напряжение всегда приводит к снижению коэффициента мощности, что увеличивает потери в системе. Это приводит к более высоким эксплуатационным расходам на оборудование и систему.
Стандартный рисунок (найденный в документации по двигателям и в оригинальной печатной версии этой статьи) иллюстрирует общее влияние высокого и низкого напряжения на характеристики двигателей с Т-образной рамой. Этот график широко используется в различных справочных материалах. Но это всего лишь пример и не дает точной информации, которая применима ко всем двигателям.Вместо этого он представляет только один тип двигателя, с большим количеством вариаций от одного двигателя к другому. Например, самая низкая точка на линии усилителя полной нагрузки не всегда возникает при напряжении на 21/2% выше номинального. На некоторых двигателях это может произойти при напряжении ниже номинального. Кроме того, повышение тока полной нагрузки при напряжениях выше номинального имеет тенденцию быть более крутым для одних конструкций обмоток двигателя, чем для других. Боковая панель на странице 78 предлагает некоторые рекомендации по определению влияния колебаний напряжения на отдельные конструкции и корпуса двигателей.
Не подвергайте свои электродвигатели и другое электрическое оборудование нагрузке из-за того, что энергосистема работает на краях предельных значений напряжения или около них. Наилучший срок службы и наиболее эффективная работа обычно достигаются, когда вы эксплуатируете двигатели при напряжениях, очень близких к номинальным значениям, указанным на паспортной табличке. Подавая напряжение на двигатели, держитесь подальше от «внешних пределов».
Этот текст является адаптацией «Документов Коверна», любезно предоставленных компанией Baldor Electric Co., Уоллингфорд, Коннектикут, отредактированной Марком Ламендолой, техническим редактором EC&M.Кауэрн — разработчик приложений Baldor.
Перемотка 3-фазного двигателя: 54 шага (с изображениями)
Введение: 3-фазный электродвигатель перемотки
Всем привет, я Нико, и в этой инструкции я покажу вам, как перематывать и обновлять старый трехфазный электродвигатель .
Если вы ищете перемотка однофазного двигателя , вы можете найти его здесь .
В этой статье я сделаю шаг вперед. В следующих шагах я покажу вам, как анализировать обмотку двигателя, разбирать двигатель, снимать подшипники, рассчитывать новую обмотку, перематывать двигатель, собирать его с новыми подшипниками и тестировать двигатель.Перемотка — очень долгий процесс. На его перемотку, замену всех старых деталей и сборку потребовалось около двух дней.
Если у вас есть какие-либо вопросы, вы можете легко написать мне.
Добавить TipAsk QuestionDownload
Шаг 1: Анализ двигателя
Я получил этот двигатель в моем университете.
Трехфазный асинхронный двигатель — самый распространенный двигатель в мире. Он имеет очень высокую эффективность и низкие затраты на производство и обслуживание. Две основные части двигателя — это ротор и статор. Ротор обычно выполнен в виде беличьей клетки и вставляется в отверстие статора.Статор выполнен из стального сердечника и обмотки.
Статор используется для создания магнитного поля. 3 фазы генерируют вращающееся магнитное поле, поэтому нам не нужен конденсатор на трехфазном двигателе. Магнитное поле вращения «режет» беличью клетку, где наводит напряжение. Поскольку клетка закорочена, напряжение генерирует электрический ток. Ток в магнитном поле создает силу.
Поскольку магнитное поле должно вращаться быстрее, чем ротор, чтобы вызвать напряжение в роторе. Поэтому скорость двигателя немного меньше скорости магнитного поля ((3000 об / мин [Магнитное поле] — 2810 об / мин [Электродвигатель])).Вот почему мы называем их Трехфазным АСИНХРОННЫМ электродвигателем .
Добавить TipAsk QuestionDownload
Шаг 2: Анализ двигателя
Motors Табло с надписью
На табличке с надписью двигателей мы можем найти наиболее полезную информацию о двигателе: треугольник ( D) подключение двигателя) [В]
Добавить TipAsk QuestionDownload
Шаг 3: Анализ обмотки
Откройте крышку распределительной коробки.
Перед измерением удалите все соединения в распределительной коробке. Измерьте сопротивление каждой обмотки, сопротивление между двумя разными обмотками и сопротивление между обмоткой и корпусом двигателя.
Сопротивления трех обмоток должны быть одинаковыми (+/- 5%). Сопротивление между двумя обмотками и рамой обмотки должно быть более 1,5 МОм.
Обгоревшие обмотки двигателей можно определить по уникальному запаху (запах горелого лака).
Добавить TipAsk QuestionDownload
Шаг 4: Разборка двигателя
Сделайте несколько снимков двигателя.Отметьте места между первой крышкой и статором и вторым корпусом и статором (нам понадобятся эти отмеченные точки при сборке двигателей).
Снимите крышки с двигателя. Обычно они крепятся к статору длинными винтами. Если не удается разделить крышку и статор, можно использовать резиновый молоток. Осторожно ударьте по крышке и попробуйте повернуть ее. Если это не сработает, нагрейте его.
Добавить TipAsk QuestionDownload
Шаг 5: Разборка двигателя
Снимите ротор со статора. Вы можете осторожно ударить по оси роторов резиновым молотком.
Добавить TipAsk QuestionDownload
Шаг 6: Разборка двигателя
Снимите вентилятор с оси роторов. У меня был металлический вентилятор, поэтому я его нагрел. Я очень легко отделил его от оси.
Снимите зажим и предохранительное кольцо, если оно у вас есть. Затем снимите вторую крышку.
Добавить TipAsk QuestionDownload
Шаг 7: Снятие подшипников
Используйте съемник для снятия подшипников с обеих сторон. Будьте осторожны, так как вы легко можете повредить ось ротора.
Добавить TipAsk QuestionDownload
Шаг 8: Удаление старой обмотки
Сначала вам нужно отрезать старую обмотку статора. Для этой работы используйте молоток и зубила. Старайтесь не повредить ламели статоров.
Проделайте то же самое с обеих сторон статора.
Добавить TipAsk QuestionDownload
Шаг 9: Удаление старой обмотки
Снимите соединения и распределительную коробку со статора. На следующем этапе вам нужно будет нагреть старые змеевики, при этом распределительный короб должен быть пустым.
Добавить TipAsk QuestionDownload
Шаг 10: Удаление старой обмотки
Нагрейте обмотку пламенной горелкой, чтобы сжечь остатки лака.
Если вы прожгли старый лак, вы сможете вытолкнуть оставшуюся обмотку из зазоров статора.
Добавить TipAsk QuestionDownload
Шаг 11: Пескоструйная обработка
Пескоструйная обработка — это процесс, при котором песок ударяется по поверхности заготовки с очень высокой скоростью и слегка повреждает ее.
Вы можете легко удалить двигатель старой окраски с помощью пескоструйной обработки. При пескоструйной очистке нужно быть осторожным, чтобы не повредить слишком сильно поверхность, особенно края колпаков.
Добавить TipAsk QuestionDownload
Шаг 12: Покраска двигателя
Цвет должен выдерживать не менее 100 градусов Цельсия.Убедитесь, что вы не раскрашиваете доску для надписей.
Добавить TipAsk QuestionDownload
Шаг 13: Идентификация старой обмотки
Вы можете найти всю информацию о типе старой обмотки в «намоточной головке». Головка намотки — это часть обмотки, в которой выполняются все соединения.
По головке намотки (типу намотки), количеству проводов в каждом зазоре и толщине провода вы можете перемотать обмотку нового двигателя без выполнения расчетов на следующем шаге.
Добавить TipAsk QuestionDownload
Шаг 14: Расчет параметров новой обмотки
Новая обмотка двигателя зависит от пакета статоров (размеров стального сердечника).Для лучшего представления я сделал 3D модель своего статора.
Необходимо измерить:
- Длина пакета статоров: lp = 87мм;
- Внешний диаметр пакета statros: Dv = 128мм;
- Внутренний диаметр корпуса статоров: D = 75,5 мм;
- Количество зазоров статоров: Z = 24;
Добавить TipAsk QuestionDownload
Шаг 15: Расчет параметров для новой обмотки
Теперь измерьте размеры паза статора.
- Ширина паза статора: b1 = 6,621 мм; b2 = 8,5мм;
- Высота паза статора: hu = 13,267 мм;
- Открытие паза статора: b0 = 2мм;
- Высота паза «горловина»: a1 = 0,641 мм;
- Ширина зуба: bz = 3,981 мм;
Добавить TipAsk QuestionDownload
Шаг 16: Расчет параметров для новой обмотки
Если у вас другая форма прорези, посмотрите на верхний рисунок.
Я скопировал эту картинку из книги [Neven Srb; Электромотори].
Добавить TipAsk QuestionDownload
Шаг 17: Расчет количества пар полюсов
Количество пар полюсов зависит от номинальных частот и скорости вращения магнитного поля. Вы можете получить скорость вращения магнитного поля, округлив скорость двигателя (2810) до ближайшего значения (3000, 1500, 1000, 750 …).
Добавить TipAsk QuestionDownload
Шаг 18: Расчет количества пар полюсов
Я подсчитал, что у моего двигателя 2 пары полюсов, и он генерирует магнитное поле, как вы можете видеть на верхнем рисунке.
Добавить TipAsk QuestionDownload
Шаг 19: Расчет шага полюса
Шаг полюса — это расстояние по внутреннему кругу статора, и он отмечает размер каждого полюса.
Добавить TipAsk QuestionDownload
Шаг 20: Расчет поверхности полюса
Поверхность полюса отмечена красным на рисунке 2. Одна полюсная поверхность — это ровно половина поверхности статора, потому что у меня двухполюсный двигатель.
Добавить TipAsk QuestionDownload
Шаг 21: Расчет поверхности полюса
Поскольку железный сердечник статора не сделан из чистого железа, нам необходимо рассчитать реальную длину корпуса.Коэффициент наполнения железом указан в верхней таблице. Это зависит от типа изоляции.
Добавить TipAsk QuestionDownload
Шаг 22: Расчет длины зуба
Добавить TipAsk QuestionDownload
Шаг 23: Расчет высоты ярма статора
Ярмо статора является частью пакета статоров, который простирается от зуба статора до конец пакета.
Добавить TipAsk QuestionDownload
Шаг 24: Расчет поперечного сечения ярма
Добавить TipAsk QuestionDownload
Шаг 25: Расчет поперечного сечения зубьев одного полюса
Добавить TipAsk QuestionDownload
Шаг 26: Расчет прорези Поверхность
Добавить TipAsk QuestionDownload
Шаг 27: Выбор типа обмотки
Я выбрал тип обмотки на основе технических характеристик двигателя.В намоточных книгах очень много разных типов схем намотки. Каждый утоплен для разного количества пар полюсов.
Обмотку по картинке взял из книги намотки. Моя новая обмотка была трехфазной однослойной концентрической обмоткой.
Добавить TipAsk QuestionDownload
Шаг 28: Расчет количества слотов на полюс и фазу
Добавить TipAsk QuestionDownload
Шаг 29: Расчет шага полюса (в слотах)
Добавить TipAsk QuestionDownload
Шаг 30: Фактор намотки
На верхнем рисунке есть таблица.Вы не можете подобрать коэффициент намотки из таблицы, если у вас однослойная намотка.
Добавить TipAsk QuestionDownload
Шаг 31: Индукция в воздушном зазоре
Выберите соответствующее значение индукции в воздушном зазоре из таблицы. Это зависит от количества пар полюсов. Если двигатель старше, выберите столбец I , в противном случае выберите значение из столбца II .
Добавить TipAsk QuestionDownload
Шаг 32: Расчет индукции в зубцах статора
Добавить TipAsk QuestionDownload
Шаг 33: Расчет индукции в ярме статора
Добавить TipAsk QuestionDownload
Шаг 34: Расчет индукции Магнитный поток одной пары полюсов
Добавить TipAsk QuestionDownload
Шаг 35: Расчет расчетного количества витков в фазе
Добавить TipAsk QuestionDownload
Шаг 36: Расчет расчетного количества витков в слоте
Добавить TipAsk ВопросЗагрузить
Шаг 37: Определите коэффициент заполнения
Чтобы получить правильный коэффициент заполнения, вам необходимо иметь поверхность вашего гнезда.Тогда вы легко запишите коэффициент заполнения с верхнего графика. Коэффициент заполнения должен находиться между верхней и нижней рекомендованной линией.
Добавить TipAsk QuestionDownload
Шаг 38: Расчет поперечного сечения провода
Добавить TipAsk QuestionDownload
Шаг 39: Расчет толщины проволоки
В соответствии с результатом вы выбираете провод, который находится в +/- 2% диапазон результата. Выбрал провод 0,8мм.
Добавить TipAsk QuestionDownload
Шаг 40: Схема обмотки
Я переделал схему обмотки из книги, чтобы она соответствовала моему статору.Я рисую новую схему обмотки, которую использовал для намотки двигателя.
На втором рисунке показано магнитное поле, создаваемое обмоткой статора. O и X показывают направление электрического тока. Ток, протекающий внутри изображения, имеет направление магнитного поля по часовой стрелке. Если бы был 4-полюсный двигатель, у нас было бы 4 области вместо 2 областей магнитного поля.
Добавить TipAsk QuestionDownload
Шаг 41: Изоляция пазов статора
Измерьте длину паза и добавьте около 16 мм (зависит от того, как вы будете скручивать бумагу).Вырежьте и скрутите, как я делал на гифках. Положите изолирующую бумагу на стол и поместите на нее линейку так, чтобы у вас получился зазор около 4 мм, когда вы вставляете изолирующую бумагу, а затем скручиваете ее. С помощью отвертки согните его и вставьте в щель. Он должен идеально подходить, чтобы вы не могли его вытащить.
Добавить TipAsk QuestionDownload
Шаг 42: Измерьте длину катушек
Сделайте модель катушки. Поместите модель в правые гнезда, оставив немного свободного места. Вы не должны оставлять слишком много места, потому что обмотка будет слишком узкой, и вы не должны делать ее слишком маленькой, потому что вы не сможете получить доступ ко всем слотам.
Добавить TipAsk QuestionDownload
Шаг 43: Намотка катушек
Поместите модель в специальный инструмент. Бесплатная 3д модель намоточного инструмента доступна в инструкции «Перемотка однофазного двигателя». Убедитесь, что вы наматываете правильное количество оборотов. После того, как намотаете катушку, ее нужно перевязать куском проволоки. Затем вы можете взять его из намоточного инструмента.
Добавить TipAsk QuestionDownload
Шаг 44: Установка катушек в пазы статоров
Осторожно поместите катушки в пазы статоров.Это может занять много времени. Будьте осторожны, чтобы не повредить лак для проводов. Поверните катушки так, чтобы их концевые провода выходили сбоку, где находится отверстие от статора к электрическим зажимам. Вы можете использовать деревянную палку, чтобы вставить обмотку в пазы.
Пометьте концы катушек!
Добавить TipAsk QuestionDownload
Шаг 45: Соединение катушек
Соедините катушки вместе согласно схеме намотки. Спаяйте и изолируйте их. Конец каждого провода катушки к распределительной коробке и дополнительно изолируйте их.
Добавить TipAsk QuestionDownload
Шаг 46: Свяжите катушки
Свяжите катушки с помощью нити шнуровки статора. Пришейте нитку для проточки статора вокруг катушек, как вы можете видеть на картинках. Плотная намотка хорошо.
Добавить TipAsk QuestionDownload
Шаг 47: Покрытие двигателя лаком
1. Нагрейте духовку до 100 ° C. Поставил в него мотор.
2. Когда двигатель нагревается, на обмотки двигателя проливается лак, как вы видите на рисунках
3. Переверните двигатель и сделайте то же самое
4.Вы можете повторно использовать старый лак.
5. Поместите мотор в горячую духовку и варите около 4 часов.
6. Выньте мотор и очистите край (чтобы крышка подходила идеально).
НЕ ДЕЛАЙТЕ ЭТО ВНУТРИ ЗДАНИЯ ИЛИ КУХНИ!
Добавить TipAsk QuestionDownload
Шаг 48: Соберите двигатель
Установите новые подшипники. Смажьте ось ротора. Вы найдете тип подшипника на стороне подшипника. Если вы не можете найти его, вы можете измерить его и найти номер в каталоге в Интернете.
Добавить TipAsk QuestionDownload
Шаг 49: Соберите двигатель
Установите крышку на статор. Следите за отметками, чтобы поставить его в нужное место.
Добавить TipAsk QuestionDownload
Шаг 50: Соберите двигатель
Вставьте ротор в статор и закройте его второй крышкой. Прикрутите мотор вместе.
Добавить TipAsk QuestionDownload
Шаг 51: Соберите двигатель
Подсоедините концы катушек к зажимам, как показано на изображении из анализируемого двигателя.
Добавить TipAsk QuestionDownload
Шаг 52: Соберите двигатель
Установите вентилятор и последнюю крышку на двигатель.Если у вас есть железный вентилятор, нагрейте его.
Добавить TipAsk QuestionDownload
Шаг 53: Измерение
Я отвез отремонтированный двигатель в университет для проведения измерений. Мы установили двигатель на специальное испытательное устройство и соединили его с измерительным оборудованием. Мы проверили следующее:
- Сопротивление обмотки
- Испытание электродвигателя в свободном режиме
- Испытание нагруженного электродвигателя
- Испытание оптимального напряжения
- Испытание короткого замыкания
- Характеристика крутящего момента
* PF = Мощность фактор
Добавить TipAsk QuestionDownload
Шаг 54: Заключение
Перемотка этого мотора заняла у меня около недели.Больше всего времени я потратил на расчет новой обмотки. У меня было много проблем с расчетом, но я их решил и получил те же параметры намотки, что и на старом.
У меня тоже было много проблем с намоткой новой обмотки. Сначала я сделал катушки слишком маленькими, и я не мог вставить последние катушки в пазы. Я не мог получить к ним доступ, потому что другие обмотки были слишком маленькими. Затем я решил увеличить размер, но снова обнаружил проблему. На этот раз обмотка была слишком большой, и я не мог закрыть крышку мотора.
Третий раз удачный двигатель перемотки.Поскольку зазор между статором и крышкой был очень маленьким, я решил сделать первые катушки побольше и последние катушки немного поменьше. Вы можете увидеть это при измерении сопротивления, когда сопротивления обмоток не идентичны. Но в следующем измерении мы увидим, что сопротивления не сильно влияют на работу электродвигателей.
Все тесты я провел с двумя разными напряжениями. Мотор был рассчитан на напряжение 380В, но сейчас у нас в ЕС 400В.
В верхней таблице данные от производителя в первой строке.Во второй строке — измерения при 380 В, а в третьей строке — 400 В. Если мы сравним все данные, то увидим, что мотор совсем неплох. Все параметры очень близки друг к другу.
Я взял все электрические уравнения и таблицы ориентации из книги: Neven Srb ELEKTROMOTORI
Надеюсь, вам понравилась моя презентация перемотки трехфазного двигателя. Если у вас есть вопросы, задавайте, и я постараюсь ответить как можно скорее. Спасибо за Ваше внимание.
С уважением Niko
Добавить TipAsk QuestionDownload
Будьте первым, кто поделится
Вы сделали этот проект? Поделитесь с нами!
Я сделал это!Рекомендации
Асинхронный двигатель и синхронный: в чем разница?
Все вращающиеся электродвигатели переменного и постоянного тока работают за счет взаимодействия двух магнитных полей.Один из них стационарный и (обычно) связан с внешним кожухом двигателя. Другой вращается и связан с вращающимся якорем двигателя (также называемым его ротором). Вращение вызвано взаимодействием двух полей.
В простом двигателе постоянного тока имеется вращающееся магнитное поле, полярность которого меняется каждые пол-оборота с помощью комбинации щеточно-коммутаторного переключателя. Щетки — в основном проводящие углеродные стержни, которые касаются проводов на роторе при их вращении — также служат для подачи электрического тока во вращающийся якорь.В бесщеточном двигателе постоянного тока ситуация несколько иная. Вращающееся поле все еще меняется на противоположное, но посредством коммутации, которая происходит в электронном виде.
Асинхронный двигатель обладает уникальным качеством, заключающимся в отсутствии электрического соединения между неподвижной и вращающейся обмотками. Сетевой переменный ток подается на клеммы двигателя и питает неподвижные обмотки.
Все асинхронные двигатели являются асинхронными двигателями. Асинхронное название возникает из-за разницы между скоростью вращения поля статора и несколько меньшей скоростью ротора.
Ротор с короткозамкнутым ротором от асинхронного двигателя. Этот пример взят из небольшого вентилятора.Большинство современных асинхронных двигателей имеют ротор в виде беличьей клетки. Цилиндрическая беличья клетка состоит из тяжелых медных, алюминиевых или латунных стержней, вставленных в канавки и соединенных с обоих концов токопроводящими кольцами, которые электрически замыкают стержни вместе. Твердый сердечник ротора состоит из листов электротехнической стали.
Также можно найти асинхронные двигатели, содержащие роторы, состоящие из обмоток, а не из короткозамкнутого ротора.Это асинхронные двигатели с фазным ротором. Смысл конструкции состоит в том, чтобы обеспечить средство уменьшения тока ротора, когда двигатель впервые начинает вращаться. Обычно это достигается путем последовательного подключения каждой обмотки ротора к резистору. Обмотки получают ток через некое контактное кольцо. Как только ротор достигает конечной скорости, полюса ротора переключаются на короткое замыкание, таким образом, электрически становятся такими же, как у ротора с короткозамкнутым ротором.
Стационарная часть обмоток асинхронного двигателя (статор) подключается к источнику переменного тока.Подача напряжения на статор вызывает прохождение переменного тока в обмотках статора. Прохождение тока индуцирует магнитное поле, которое воздействует на ротор, создавая напряжение и ток в элементах ротора.
Северный полюс статора индуцирует южный полюс ротора. Но положение полюса статора меняется при изменении амплитуды и полярности переменного напряжения. Индуцированный полюс в роторе пытается следовать за вращающимся полюсом статора. Однако закон Фарадея гласит, что электродвижущая сила создается, когда петля из проволоки перемещается из области с низкой напряженностью магнитного поля в область с высокой напряженностью магнитного поля, и наоборот.Если бы ротор точно следовал за движущимся полюсом статора, напряженность магнитного поля не изменилась бы. Таким образом, ротор всегда отстает от вращения поля статора, потому что поле ротора всегда на некоторую величину отстает от поля статора. Это отставание заставляет ротор вращаться со скоростью, несколько меньшей, чем скорость поля статора. Разница между ними называется скольжением.
Размер скольжения может быть разным. Это зависит главным образом от нагрузки двигателя, но также зависит от сопротивления цепи ротора и напряженности поля, создаваемого магнитным потоком статора.Скольжение в двигателе конструкции B составляет от 0,5% до 5%.
Когда двигатель остановлен, обмотки ротора и статора фактически являются первичной и вторичной обмотками трансформатора. Когда к статору изначально подается переменный ток, ротор не движется. Таким образом, индуцированное в роторе напряжение имеет ту же частоту, что и напряжение статора. Когда ротор начинает вращаться, частота индуцированного в нем напряжения f r падает. Если f — частота напряжения статора, то скольжение s связывает их через f r = sf.Здесь s выражается в виде десятичной дроби.
Поскольку асинхронный двигатель не имеет щеток, коллектора или подобных движущихся частей, его производство и обслуживание дешевле, чем другие типы двигателей.
Для сравнения, рассмотрим синхронный двигатель. Здесь ротор вращается с той же скоростью, то есть синхронно, с магнитным полем статора. Как и асинхронный двигатель, синхронный двигатель переменного тока также содержит статор и ротор. Обмотки статора также подключаются к сети переменного тока, как в асинхронном двигателе.Магнитное поле статора вращается синхронно с частотой сети.
Обмотка ротора синхронного двигателя может получать ток различными способами, но обычно не за счет индукции (за исключением некоторых конструкций, только для обеспечения пускового момента). Тот факт, что ротор вращается синхронно с частотой сети переменного тока, делает синхронный двигатель полезным для управления высокоточными часами.
Следует подчеркнуть, что ротор синхронного двигателя переменного тока вращается синхронно с целым числом циклов переменного тока.Это не то же самое, что сказать, что он вращается со скоростью, равной частоте сети. Частота вращения ротора двигателя, то есть синхронная скорость N, составляет:
.N = 120 футов / P = 60 кадров
Где f — частота сети переменного тока в Гц, P — количество полюсов (на фазу), а p — количество пар полюсов на фазу.
Соответственно, чем больше полюсов, тем медленнее вращается синхронный двигатель. При равной мощности дороже построить более медленный двигатель. При 60 Гц:
- Двухполюсный / фазный синхронный двигатель переменного тока вращается со скоростью 3600 об / мин.
- Четырехполюсный / фазный синхронный двигатель переменного тока вращается со скоростью 1800 об / мин.
- Шестиполюсный / фазный синхронный двигатель переменного тока вращается со скоростью 1200 об / мин.
- Восьмиполюсный / фазный синхронный двигатель переменного тока вращается со скоростью 900 об / мин
- Десятиполюсный / фазный синхронный двигатель переменного тока вращается со скоростью 720 об / мин.
- Двенадцатиполюсный / фазный синхронный двигатель переменного тока вращается со скоростью 600 об / мин.
малой мощности полезны там, где требуется точное время.Синхронные двигатели переменного тока высокой мощности, хотя и более дорогие, чем трехфазные асинхронные двигатели, обладают двумя дополнительными качествами. Несмотря на более высокую начальную стоимость, они могут окупиться в долгосрочной перспективе, поскольку они более энергоэффективны, чем другие типы двигателей. Во-вторых, иногда одновременно, они могут работать с опережающим или единичным коэффициентом мощности, поэтому один или несколько синхронных двигателей переменного тока могут обеспечивать коррекцию коэффициента мощности, а также выполнять полезную работу.
Существует несколько различных типов синхронных двигателей переменного тока.Обычно их классифицируют по способам создания магнитного поля. Двигатели с независимым возбуждением имеют магнитные полюса, питаемые от внешнего источника. Напротив, магнитные полюса возбуждаются самим двигателем в самовозбуждаемой (также иногда называемой невозбужденной и непосредственно возбужденной) машиной. Типы без возбуждения включают реактивные двигатели, двигатели с гистерезисом и двигатели с постоянными магнитами. Кроме того, существуют двигатели с возбуждением постоянным током.
Синхронные двигатели без возбуждения имеют стальные роторы.В процессе работы ротор намагничивается необходимыми магнитными полюсами аналогично тому, как это происходит в асинхронном двигателе. Но ротор вращается с той же скоростью и синхронно с вращающимся магнитным полем статора. Причина в том, что в роторе есть прорези. Двигатели запускаются как асинхронные. Когда они приближаются к синхронной скорости, прорези позволяют синхронному магнитному полю фиксироваться на роторе. Затем двигатель вращается с синхронной скоростью до тех пор, пока требуемый крутящий момент низкий.
В реактивном электродвигателе ротор имеет выступающие полюса, напоминающие отдельные зубцы.Ротора меньше, чем полюсов статора, что препятствует совмещению полюсов статора и ротора, и в этом случае вращения не будет. Реактивные двигатели не запускаются автоматически. По этой причине в ротор часто встраивают специальные обмотки (так называемые обмотки с короткозамкнутым ротором), поэтому реактивный двигатель запускается как асинхронный.
Двигатель с гистерезисом использует широкую петлю гистерезиса в высококоэрцитивном роторе из кобальтовой стали. Из-за гистерезиса фаза намагничивания в роторе отстает от фазы вращающегося магнитного поля статора.Эта задержка создает крутящий момент. При синхронной скорости поля ротора и статора блокируются, обеспечивая непрерывное вращение. Одним из преимуществ гистерезисного двигателя является то, что он самозапускается.
Синхронный двигатель переменного тока с постоянными магнитами имеет постоянные магниты, встроенные в ротор. Последние лифты приводятся в действие этими двигателями, и коробка передач не требуется.
Пример двигателя с постоянными магнитами с электронной коммутацией, в данном случае от небольшого воздушного вентилятора. Этот стиль называется аутраннером, потому что ротор находится вне статора и встроен в лопасти вентилятора.Это четырехполюсный двигатель, о чем свидетельствуют четыре обмотки статора (внизу). Также виден датчик Холла, который обеспечивает часть электронной коммутации.Синхронный двигатель с прямым возбуждением может называться различными именами, включая ECPM (постоянный магнит с электронной коммутацией), BLDC (бесщеточный двигатель постоянного тока) или просто бесщеточный двигатель с постоянным магнитом. Ротор содержит постоянные магниты. Магниты могут устанавливаться на поверхности ротора или вставляться в узел ротора (в этом случае двигатель называется внутренним двигателем с постоянными магнитами).
Пример того, как на катушки двигателя постоянного тока подается питание в последовательности, которая приводит в движение ротор.Компьютер контролирует последовательное включение питания обмоток статора в нужное время с помощью твердотельных переключателей. Питание подается на катушки, намотанные на зубья статора, и если выступающий полюс ротора идеально совмещен с зубом статора, крутящий момент не создается. Если зуб ротора находится под некоторым углом к зубу статора, по крайней мере некоторый магнитный поток пересекает зазор под углом, не перпендикулярным поверхностям зуба.В результате возникает крутящий момент на роторе. Таким образом, переключение мощности на обмотки статора в нужное время вызывает структуру магнитного потока, которая приводит к движению либо по часовой стрелке, либо против часовой стрелки.
Еще один тип синхронного двигателя — это реактивный двигатель с регулируемым сопротивлением (SR).
Его ротор состоит из многослойных стальных пластин с рядом зубцов. Зубы магнитопроницаемы, а окружающие их области слабо проницаемы из-за прорезанных в них пазов.
В отличие от асинхронных двигателей, здесь нет стержней ротора, и, следовательно, в роторе отсутствует ток, создающий крутящий момент.Отсутствие проводов какой-либо формы на роторе SR означает, что общие потери в роторе значительно ниже, чем в других двигателях, в которых роторы имеют проводники.
Крутящий момент, создаваемый двигателем SR, регулируется путем регулировки величины тока в электромагнитах статора. Затем скорость регулируется путем регулирования крутящего момента (через ток в обмотке). Этот метод аналогичен способу регулирования скорости с помощью тока якоря в традиционном щеточном двигателе постоянного тока.
Двигатель SR создает крутящий момент, пропорциональный величине тока, подаваемого на его обмотки.На производство крутящего момента не влияет скорость двигателя. Это отличается от асинхронных двигателей переменного тока, в которых при высоких скоростях вращения в области ослабления поля ток ротора все больше отстает от вращающегося поля по мере увеличения числа оборотов двигателя.
И, наконец, синхронный двигатель переменного тока с возбуждением постоянным током. Для создания магнитного поля требуется выпрямленный источник питания. Эти двигатели обычно имеют мощность, превышающую одну лошадиную силу.
Carb Краткое руководство | S&S Cycle
Краткое руководство по углеводам | S&S CycleЗагрузить руководство по настройке карбюратора
Посмотрите видео о базовой настройке Super E&G Carb.
- Убедитесь, что карбюратор установлен на заводские настройки:
- Винт смеси холостого хода, 11/4 оборота от легкого положения.
- Винт холостого хода, ½ оборота по часовой стрелке от точки зацепления.
- Регулировочный винт акселератора, два оборота против часовой стрелки от седла.
Асинхронные двигатели — Руководство по устройству электроустановок
Номинальная мощность двигателя в кВт (Pn) указывает на его номинальную эквивалентную выходную механическую мощность.
Полная мощность в кВА (Па), подаваемая на двигатель, является функцией выходной мощности, КПД двигателя и коэффициента мощности: Па = Pnηcosφ {\ Displaystyle Pa = {\ гидроразрыва {Pn} {\ eta \ cos \ varphi}}}
Текущий спрос
Номинальный ток In, подаваемый на двигатель, определяется по следующим формулам:
Трехфазный двигатель
In = Pn × 1033 × U × η × cosφ {\ displaystyle I_ {n} = {\ frac {P_ {n} \ times 10 ^ {3}} {{\ sqrt {3}} \ times U \ times \ эта \ раз cos \ varphi}}}
Однофазный двигатель
In = Pn × 103U × η × cosφ {\ displaystyle I_ {n} = {\ frac {P_ {n} \ times 10 ^ {3}} {U \ times \ eta \ times cos \ varphi}}}
где
In = номинальная потребляемая мощность (в амперах)
Pn = номинальная мощность (в кВт)
U = напряжение между фазами для трехфазных двигателей и напряжение между выводами для однофазных двигателей (в вольтах) .Однофазный двигатель может быть подключен по схеме «фаза-нейтраль» или «фаза-фаза».
η = КПД на единицу, т.е. выход, кВт / вход кВт
cos φ = коэффициент мощности, т.е. вход, кВт / вход кВА
Допустимый ток и уставка защиты
- Пиковое значение непереходного тока может быть очень высоким; Типичное значение примерно в 12–15 раз больше номинального действующего значения In. Иногда это значение может достигать 25 раз.
- Автоматические выключатели, контакторы и тепловые реле Schneider Electric спроектированы так, чтобы выдерживать пуск двигателя с очень высоким непереходным током (субпереходное пиковое значение может быть до 19 раз больше номинального действующего значения In).
- Если во время пуска происходит непредвиденное срабатывание защиты от сверхтока, это означает, что пусковой ток превышает нормальные пределы. В результате может быть достигнута некоторая максимальная устойчивость распределительного устройства, может быть сокращен срок службы и даже некоторые устройства могут быть разрушены. Чтобы избежать такой ситуации, следует рассмотреть возможность увеличения размера распределительного устройства. Распределительные устройства
- Schneider Electric предназначены для защиты пускателей двигателей от коротких замыканий. В соответствии с риском в таблицах показано сочетание автоматического выключателя, контактора и теплового реле для получения координации типа 1 или типа 2 (см. Главу Характеристики конкретных источников и нагрузок).
Пусковой ток двигателя
Хотя на рынке можно найти высокоэффективные двигатели, на практике их пусковые токи примерно такие же, как у некоторых стандартных двигателей. Использование пускателя по схеме треугольник, устройства статического плавного пуска или привода с регулируемой скоростью позволяет снизить значение пускового тока (пример: 4 In вместо 7,5 In).
См. Также «Асинхронные двигатели» для получения дополнительной информации.
Компенсация реактивной мощности (квар), подаваемой на асинхронные двигатели
Как правило, по техническим и финансовым причинам целесообразно снизить ток, подаваемый на асинхронные двигатели.Этого можно достичь, используя конденсаторы, не влияя на выходную мощность двигателей.
Применение этого принципа к работе асинхронных двигателей обычно называется «улучшением коэффициента мощности» или «коррекцией коэффициента мощности». Как обсуждалось в главе «Коррекция коэффициента мощности», полная мощность (кВА), подаваемая на асинхронный двигатель, может быть значительно снижена за счет использования конденсаторов с параллельным подключением. Снижение входной кВА означает соответствующее уменьшение входного тока (поскольку напряжение остается постоянным).
Компенсация реактивной мощности особенно рекомендуется для двигателей, которые длительное время работают на пониженной мощности.
Как отмечалось выше, cosφ = входная мощность кВА, входная кВА {\ displaystyle {\ mbox {cos}} \, \ varphi = {\ frac {\ mbox {входная мощность}} {\ mbox {входная мощность кВА}}}}, так что кВА уменьшение входного сигнала на входе кВА увеличит (т.е. улучшит) значение cosφ
Ток, подаваемый на двигатель после коррекции коэффициента мощности, определяется по формуле:
I = Iacosφcosφ ′ {\ displaystyle {\ mbox {I}} = {\ mbox {Ia}} {\ frac {{\ mbox {cos}} \, \ varphi} {{\ mbox {cos}} \, \ varphi ^ {‘}}}}
, где cos φ — коэффициент мощности до компенсации, а cos φ ‘ — коэффициент мощности после компенсации, In — исходный ток.
На рисунке A4 ниже показаны в зависимости от номинальной мощности двигателя стандартные значения тока двигателя для нескольких источников напряжения (IEC 60947-4-1, приложение G).
Рис. A4 — Номинальная рабочая мощность и токи
| кВт | л.с. | 230 В | 380–415 В | 400 В | 440-480 В | 500 В | 690В |
|---|---|---|---|---|---|---|---|
| А | А | А | А | А | А | ||
| 0.18 0,25 0,37 |
— — — |
1,0 1,5 1,9 |
— — — |
0,6 0,85 1,1 |
— — — |
0,48 0,68 0,88 |
0,35 0,49 0,64 |
| — 0,55 — |
1/2 – 3/4 |
— 2,6 — |
1,3 — 1,8 |
— 1,5 — |
1,1 — 1.6 |
— 1,2 — |
— 0,87 — |
| — 0,75 1,1 |
1 — — |
– 3,3 4,7 |
2,3 — — |
– 1,9 2,7 |
2,1 — — |
— 1,5 2,2 |
— 1,1 1,6 |
| — — 1,5 |
1-1 / 2 2 — |
— — 6,3 |
3.3 4,3 — |
— — 3,6 |
3,0 3,4 — |
— — 2,9 |
— — 2,1 |
| 2,2 — 3,0 |
— 3 — |
8,5 — 11,3 |
— 6,1 — |
4,9 — 6,5 |
— 4,8 — |
3,9 — 5,2 |
2,8 — 3,8 |
| 4 — 5.5 |
— 5 — |
15 – 20 |
9,7 9,7 — |
8,5 — 11,5 |
7,6 7,6 — |
6,8 – 9,2 |
4,9 — 6,7 |
| — — 7,5 |
7-1 / 2 10 — |
— — 27 |
14,0 18,0 — |
— — 15,5 |
11,0 14,0 — |
— — 12.4 |
– – 8,9 |
| 11 — — |
– 15 20 |
38,0 — — |
– 27,0 34,0 |
22,0 — — |
– 21,0 27,0 |
17,6 — — |
12,8 — — |
| 15 18,5 — |
– – 25 |
51 61 — |
– – 44 |
39 35 — |
– – 34 |
23 28 — |
17 21 — |
| 22 — — |
– 30 40 |
72 — — |
– 51 66 |
41 — — |
– 40 52 |
33 — — |
24 — — |
| 30 37 — |
– – 50 |
96 115 — |
– – 83 |
55 66 — |
— — 65 |
44 53 — |
32 39 — |
| — 45 55 |
60 — — |
– 140 169 |
103 — — |
– 80 97 |
77 — — |
– 64 78 |
– 47 57 |
| — — 75 |
75 100 — |
– – 230 |
128 165 — |
– – 132 |
96 124 — |
– – 106 |
– – 77 |
| 90 — 110 |
— 125 — |
278 – 340 |
— 208 — |
160 — 195 |
– 156 |
128 – 156 |
93 — 113 |
| — 132 — |
150 – 200 |
— 400 — |
240 – 320 |
— 230 — |
180 – 240 |
— 184 — |
— 134 — |
| 150 160 185 |
— — — |
— 487 — |
— — — |
— 280 — |
— — — |
— 224 — |
— 162 — |
| — 200 220 |
250 — — |
— 609 — |
403 — — |
— 350 — |
302 — — |
— 280 — |
— 203 — |
| — 250 280 |
300 — — |
— 748 — |
482 — — |
— 430 — |
361 — — |
— 344 — |
— 250 — |
| — — 300 |
350 400 — |
— — — |
560 636 — |
— — — |
414 474 — |
— — — |
— — — |
| 315 — 335 |
— 450 — |
940 — — |
— — — |
540 — — |
— 515 — |
432 — — |
313 — — |
| 355 — 375 |
— 500 — |
1061 — — |
— 786 — |
610 — — |
— 590 — |
488 — — |
354 — — |
| 400 425 450 |
— — — |
1200 — — |
— — — |
690 — — |
— — — |
552 — — |
400 — — |
| 475 500 530 |
— — — |
— 1478 — |
— — — |
— 850 — |
— — — |
— 680 — |
— 493 — |
| 560 600 630 |
— — — |
1652 — 1844 |
— — — |
950 – 1060 |
— — — |
760 – 848 |
551 – 615 |
| 670 710 750 |
— — — |
— 2070 — |
— — — |
— 1190 — |
— — — |
— 952 — |
— 690 — |
| 800 850 900 |
— — — |
2340 — 2640 |
— — — |
1346 — 1518 |
— — — |
1076 – 1214 |
780 – 880 |
| 950 1000 |
— — |
– 2910 |
— — |
– 1673 |
— — |
– 1339 |
– 970 |
