Какие существуют основные типы схем управления электроприводами. Как работают схемы с магнитными пускателями. В чем особенности схем с динамическим торможением. Какие функции выполняют системы автоматического управления электроприводами.
Классификация схем управления электроприводами
Схемы управления электроприводами можно классифицировать по нескольким основным признакам:
- По степени автоматизации:
- Неавтоматизированные (ручное управление)
- Автоматизированные
- Автоматические
- По типу управляемого двигателя:
- Для двигателей постоянного тока
- Для асинхронных двигателей
- Для синхронных двигателей
- По функциональному назначению:
- Пусковые
- Реверсивные
- Тормозные
- Регулирования скорости
Выбор конкретной схемы управления зависит от требований технологического процесса, типа электропривода и условий эксплуатации.
Принципы работы схем с магнитными пускателями
Магнитные пускатели являются одним из самых распространенных устройств управления электроприводами. Рассмотрим принцип работы типовой схемы управления с нереверсивным магнитным пускателем:
- При нажатии кнопки «Пуск» замыкается цепь питания катушки магнитного пускателя.
- Магнитный пускатель срабатывает, замыкая силовые контакты в цепи питания двигателя.
- Блок-контакт магнитного пускателя шунтирует кнопку «Пуск», обеспечивая самоподхват.
- Для остановки двигателя нажимается кнопка «Стоп», размыкающая цепь питания катушки.
- Магнитный пускатель отключается, размыкая силовые контакты.
Такая схема обеспечивает защиту от перегрузок и нулевую защиту двигателя.
Особенности схем с динамическим торможением
Динамическое торможение позволяет быстро остановить электродвигатель. Основные особенности схем с динамическим торможением:
- После отключения питания обмотки статора подключаются к источнику постоянного тока.
- Создается неподвижное магнитное поле, которое наводит ток в роторе.
- Взаимодействие тока ротора с магнитным полем создает тормозной момент.
- Используется контактор торможения для подключения постоянного тока.
- Применяется реле времени для ограничения длительности торможения.
Схемы с динамическим торможением позволяют значительно сократить время остановки двигателя по сравнению со свободным выбегом.
Функции систем автоматического управления электроприводами
Современные системы автоматического управления электроприводами выполняют следующие основные функции:
- Пуск и останов электродвигателей
- Регулирование скорости вращения
- Реверсирование направления вращения
- Торможение двигателей
- Защита от перегрузок и аварийных режимов
- Обеспечение заданной последовательности операций
- Стабилизация скорости и других параметров
- Синхронизация работы нескольких приводов
- Оптимизация энергопотребления
Реализация этих функций позволяет повысить производительность, надежность и эффективность работы электроприводов в составе технологического оборудования.
Схемы управления асинхронными двигателями с короткозамкнутым ротором
Асинхронные двигатели с короткозамкнутым ротором широко применяются в промышленности благодаря своей простоте и надежности. Рассмотрим основные типы схем управления такими двигателями:
Прямой пуск
Простейшая схема прямого пуска включает в себя:
- Автоматический выключатель
- Магнитный пускатель
- Кнопки управления «Пуск» и «Стоп»
- Тепловое реле защиты от перегрузки
Такая схема подходит для двигателей малой и средней мощности при отсутствии особых требований к пусковым токам.
Пуск переключением со звезды на треугольник
Эта схема позволяет снизить пусковой ток примерно в 3 раза. Основные элементы:
- Три контактора (линейный, звезда, треугольник)
- Реле времени для переключения
- Кнопки управления
При пуске обмотки статора соединяются звездой, а затем переключаются на треугольник.
Плавный пуск
Устройства плавного пуска обеспечивают постепенное нарастание напряжения на двигателе. Это позволяет:
- Снизить пусковой ток
- Уменьшить механические нагрузки
- Обеспечить плавный разгон механизма
Схема включает тиристорный регулятор напряжения и микропроцессорный блок управления.
Схемы управления электроприводами с обратной связью
Для точного регулирования параметров электропривода применяются схемы управления с обратной связью. Основные виды обратной связи:
- По скорости вращения
- По току двигателя
- По положению механизма
Сигнал обратной связи сравнивается с заданным значением, и система управления корректирует выходные параметры привода. Это позволяет:
- Поддерживать заданную скорость при изменении нагрузки
- Обеспечивать точное позиционирование механизмов
- Ограничивать ток и момент двигателя
Схемы с обратной связью строятся на базе микропроцессорных систем управления и силовых полупроводниковых преобразователей.
Защитные функции в схемах управления электроприводами
Современные схемы управления электроприводами должны обеспечивать комплексную защиту оборудования. Основные виды защит:
- От короткого замыкания
- От перегрузки по току
- От перегрева двигателя
- От обрыва фазы питания
- От недопустимых отклонений напряжения
- От механических перегрузок
Для реализации защитных функций применяются:
- Автоматические выключатели
- Тепловые и электронные реле перегрузки
- Датчики температуры обмоток
- Реле контроля фаз
- Электронные блоки защиты
Правильный выбор и настройка защитных устройств позволяет повысить надежность и долговечность электропривода.
Энергоэффективные схемы управления электроприводами
Современные тенденции развития электропривода направлены на повышение энергоэффективности. Основные способы снижения энергопотребления:
- Применение частотно-регулируемого привода
- Оптимизация режимов работы
- Рекуперация энергии торможения
- Использование высокоэффективных двигателей
Частотно-регулируемый привод позволяет:
- Регулировать скорость в широком диапазоне
- Оптимизировать КПД системы
- Снизить пусковые токи
- Обеспечить плавный пуск и останов
Схемы с рекуперацией преобразуют энергию торможения в электрическую и возвращают ее в сеть. Это особенно эффективно для приводов с частыми пусками и остановами.
Принципиальная Схема Управления Электроприводом — tokzamer.ru
Чаще реверсирование двигателя выполняется одним реверсивным магнитным пускателем.
В многодвигательных приводах или приводах механизмов, связанных общей технологической зависимостью, должна быть обеспечена определенная очередность включения и отключения электродвигателей. Двигатель останавливается.
Блокировки применяют также при установке ограждений в опасных зонах оборудования. В цепи магнитного пускателя включен контакт, принадлежащий контактору, управляющему двигателем.
Нереверсивная схема магнитного пускателя
Сработавшие замыкающие контакты реле динамического торможения K3.
Если двигатель останавливается, автоматически выключается двигатель. Если же давление в системе смазки компрессора упадет, то замкнется контакт РДМ, создастся замкнутая цепь тревожной сигнализации и сработает звонок на схеме не показан.

Одновременно блок-контакт Л1 размыкается и обесточивает реле РУ1. Управлять асинхронным двигателем можно и с большего числа мест Рисунок 5 — Схема управления электродвигателем с двух мест при наличии соответствующего количества кнопочных станций Рисунок 6 — Схема управления асинхронным двигателем с помощью реверсивного магнитного пускателя: а — силовая цепь; б — цепь управления с электрической блокировкой контактами магнитного пускателя и контактами кнопочной станции; в — цепь управления с электрической блокировкой контактами магнитного пускателя Реверсивные магнитные пускатели комплектуются из двух нереверсивных.
Вспомогательный контакт КМ в цепи управления шунтирует кнопочный выключатель SBС и обеспечивает продолжительную работу привода после снятия нагрузки нажатия с кнопочного выключателя. Схема нереверсивного управления трёхфазным асинхронным двигателем с короткозамкнутым ротором при динамическом торможении.

В приводах, где применяются двигатели с короткозамкнутым ротором, частоту вращения электродвигателя изменяют путем изменения числа пар полюсов. Электродвигатель обладает высоким пусковым моментом и не допускает прямого пуска.
Двухпроводная схема управления стрелкой
Схемы управления электроприводами
Схема пуска асинхронного двигателя с фазным ротором с помощью магнитной станции П При включённом трёхполюсном, выключателе Q1, выполненном в виде рубильника, нажатие пусковой кнопки S2 приводит к присоединению катушки линейного контактора K1 к источнику питания и включению главными замыкающими контактами K1. Схема обеспечивает прямой пуск и реверс двигателя, а также торможение противовключением при ручном неавтоматическом управлении.
При снижении температуры до установленной ДОТ размыкается и компрессор выключается. Схема последовательного включения двигателей Пример 5.
Реостатный пуск асинхронного двигателя с кз ротором.

Точка П является точкой трогания. Один асинхронный низковольтный электродвигатель, предназначенный для привода компрессора.
Защита двигателя при реверсивном управлении такая же, как и при нереверсивном. При реверсировании двигателя на ходу вначале происходит торможение от данной скорости до нулевой, а затем разгон в другом направлении.
В случае необходимости только торможения двигателя при достижении им нулевой частоты вращения должна быть вновь нажата кнопка SВЗ, что приведет к отключению двигателя от сети и возвращению схемы в исходное положение. Средства для ингаляционного наркоза : Наркоз наступает в результате вдыхания ингаляции средств, которое осуществляют или с помощью маски
Достаточно подать на статор двигателя трехфазное напряжение и двигатель сразу запускается. Частоту вращения асинхронного двигателя можно регулировать изменением частоты тока питающей сети, числа пар полюсов статорной обмотки, введением в цепь ротора сопротивления, вызывающего увеличение скольжения.
Схемы управления магнитным пускателем
Нереверсивная схема управления асинхронного двигателя.
В случае, если одна из электрифицированных задвижек окажется неисправной, промежуточное реле PIT разрывает цепи автоматического управления насосными агрегатами гидроэлеваторов. Такой пускатель состоит из двух простых пускателей, подвижные части которых между собой связаны механически с помощью устройства в виде коромысла.
При включённом трёхполюсном, выключателе Q1, выполненном в виде рубильника, нажатие пусковой кнопки S2 приводит к присоединению катушки линейного контактора K1 к источнику питания и включению главными замыкающими контактами K1. Одной из преимуществ использования асинхронных двигателей с короткозамкнутым ротором является простота их включения в сеть. Простейшая схема управления электродвигателем может иметь только неавтоматический выключательQи предохранителиF или автоматический выключатель.
Схема обеспечивает прямой пуск и реверс двигателя, а также торможение противовключением при ручном неавтоматическом управлении. В приводах, где применяются двигатели с короткозамкнутым ротором, частоту вращения электродвигателя изменяют путем изменения числа пар полюсов. Мощность электродвигателя 29,5 кВт, пуск автоматизирован.

По истечении некоторого времени контакты К размыкаются и замыкаются контакты КУ. Начинается разгон через ограничивающие резисторы R1—R4.
Основным элементом этой схемы является реверсивный магнитный пускатель, который включает в себя два линейных контактора КМ1 и КМ2 и два тепловых реле защиты КК рис. Наиболее часто в качестве привода в станках и установках применяются трехфазные асинхронные двигатели с короткозамкнутым ротором.
Типовые схемы управления электроприводами с асинхронными двигателями
Это приводит к включению контактора КМ2 и подаче на АД напряжения источника питания с другим порядком чередования фаз. Происходит разбег двигателя по его естественной характеристике. Он срабатывает и своими главными контактами К подключает двигатель на трехфазное питание Л1, Л2, Л3. Принципиальная схема силовой части нереверсивного электропривода по системе ТП-Д Рис.
Электрические блокировки для предотвращения одновременного включения двух контакторов осуществляются с помощью размыкающих контактов КM1 и КM2 рисунок 6, б. В результате блокировочными связями световая сигнализация обеспечивает контроль над направлением вращения двигателя при реверсе. Одновременно контактор своим замыкающим вспомогательным контактом осуществляет самоблокировку, а размыканием другого вспомогательного контакта отключает катушки. При этом срабатывает контактор малой скорости, который обеспечивает главными замыкающими контактами K1. Нажатие остановочной кнопки S1 размыкает цепь катушки линейного контактора K1 и его главные контакты K1.
Так как привод конвейеров производится электродвигателями, то более подходящими для данного случая будут электрические или механические ЛЭ. После разбега двигателя до низкой частоты вращения может быть осуществлен его разгон до высокой частоты вращения. Включение КМ1 одновременно приводит к срабатыванию контактора КМ4, который своим контактом шунтирует ненужный при пуске резистор противовключения Rд2, а также разрывает цепь катушки реле времени КТ. При использовании автотрансформаторов см. При этом речь может идти о потоках энергии различного вида: электрической, механической, тепловой и других.
Как подключить магнитный пускатель. Схема подключения.
Наша группа «ВКонтакте»
В многодвигательных приводах или приводах механизмов, связанных общей технологической зависимостью, должна быть обеспечена определенная очередность включения и отключения электродвигателей.
Для включения электродвигателя М должен быть включен выключатель Q.
Происходит разбег двигателя по его естественной характеристике.
Схема нереверсивного управления трёхфазным асинхронным двигателем с короткозамкнутым ротором при торможении противовключением. Этот контактор шунтирует вторую ступень пускового резистора и своим вспомогательным контактом с выдержкой времени включает обмотку третьего контактора, который шунтирует последнюю ступень пускового резистора. Для отключения электродвигателя от сети при его вращении в любом направлении необходимо нажать на кнопочный выключатель SBТ.
В цепи магнитного пускателя включен контакт, принадлежащий контактору, управляющему двигателем. Для остановки двигателя необходимо нажать кнопку SВ1, при этом отключаются пускатель КМ и двигатель М.
Реостатный пуск асинхронного двигателя с кз ротором. Также возможно питание катушки электромагнитного пускателя напряжение В. Современные высокие требования к качеству технологического процесса и производительности различных механизмов могут быть обеспечены только на основании применения автоматизированных электроприводов.
КЛАССИФИКАЦИЯ ЭЛЕКТРИЧЕСКИХ СХЕМ. УСЛОВНЫЕ ОБОЗНАЧЕНИЯ ЭЛЕМЕНТОВ СХЕМ
Управление электродвигателями с фазным ротором. Катушка электромагнит включения магнитного пускателя КМ получает питание от сети и замыкает контакты КМ в главной цепи и в цепи управления. Пуск начинается после перемещения контактной щетки на вывод 1. При вращении двигателя, например вправо, горит лампа HL1, включаемая контактом KM1.
Во многих случаях при управлении электроприводом необходимо изменять направление вращения электродвигателя. После замыкания выключателя управления В получает питание катушка реле Р1.
Реверсивная схема подключения магнитного пускателя
Схемы управления электроприводами | Электротехника и электрооборудование
Страница 27 из 39
Электропривод машин, применяемых на строительстве или на предприятиях строительной индустрии, может быть ручным неавтоматизированным или автоматизированным.
Неавтоматизированным называют электропривод, управление которым при всех режимах работы производят аппаратами ручного управления.
Автоматизированным электроприводом называют такой, в котором управление переходными режимами — пуском, регулированием скорости, торможением, остановкой и т. п. — производят автоматически, после того, как подан первый командный импульс.
В настоящее время на строительных машинах широко применяют релейно-контакторное управление электроприводами, осуществляемое электромагнитными контакторами, реле и командоаппаратами.
Электрической схемой называют чертеж, показывающий функциональные, электрические, магнитные и другие связи между частями электрической установки. Объем и характер сведений, содержащихся в электрической схеме, определяются ее назначением.
Схемы электрических устройств трехфазного тока могут быть трехлинейными и однолинейными. На трехлинейных схемах каждый провод вычерчивается отдельно, на однолинейных — три провода трехфазной проводки изображают одной линией. Иногда на проводах однолинейных схем делаются черточки, количество которых соответствует количеству проводов. Различают схемы первичной и вторичной коммутации. На схемах первичной коммутации показывают электрические машины и аппараты, шины и провода, т. е. элементы и электрические цепи электроустановки, по которым проходит поток передаваемой и распределяемой электроэнергии. На схемах вторичной коммутации показывают вспомогательные цепи: управления, сигнализации, измерения, защиты и т. п. Электрические схемы подразделяются на принципиальные и монтажные. 
Рис. 13.6. Элементная схема управления электродвигателя с помощью магнитного пускателя
Принципиальные схемы обычно выполняют однолинейными для указания основных принципиальных данных, характеризующих электроустановку: мощность электромашин, принятые способы управления ими, применяемые при этом приборы измерения и т. п.
Существенные особенности имеют принципиальные схемы вторичной коммутации, в частности схемы управления и сигнализации в устройствах автоматизированного электропривода машин и механизмов. Эти схемы выполняются в виде так называемых элементных или развернутых схем, в которых приборы и аппараты изображены не как единое целое, а разобранными на составные элементы; катушки электромагнитов, главные контакты, вспомогательные блок-контакты, кнопки управления и т. п. Каждый элемент показывают отдельно и ставят в ту электрическую цепь, в которой он действует. На рис. 13.6 приведена элементная схема управления электродвигателем при помощи магнитного пускателя. Схема дана в двух вариантах: а — в совмещенном виде с показом силовых цепей и цепей управления и сигнализации; б — развернутая схема только цепей управления и сигнализации. Сложные схемы вторичной коммутации, как правило, изображают именно таким образом: все элементы располагают между двумя параллельными линиями, изображающими источник питания вторичных цепей, в данном случае две фазы трехфазной сети (могут быть также фаза и нуль четырехпроводной сети трехфазного тока или два полюса сети постоянного тока). В обозначениях на схеме все элементы одного аппарата имеют общую первую букву — на указанной схеме буква П — пускатель. На схеме рис. 13.6 кнопка «пуск» в положении «не включено», электродвигатель не работает, горит зеленая сигнальная лампа Лзел, питаемая через размыкающий в нормальном положении замкнутый контакт пускателя ПК2. При нажатии кнопки «пуск» замыкается цепь катушки электромагнита пускателя ПК, замыкаются главные контакты пускателя в цепи электродвигателя П — двигатель начинает работать, одновременно замыкается блок-контакт ПК1 и размыкается блок-контакт ПК2, в результате чего зеленая лампа гаснет, загорается красная, сигнализируя о том, что электродвигатель находится в работе. Кнопку «пуск» можно отпустить; она вернется в свое исходное положение, контакты ее разомкнутся, но ток в цепи управления будет по-прежнему проходить через катушку контактора, так как блок-контакт ПК1 теперь замкнут и создает обход цепи тока (принято говорить, что блок-контакт шунтирует кнопку «пуск»).
Для остановки электродвигателя достаточно нажать кнопку «стоп». Контакты ее разомкнутся, цепь тока, питающего катушку электромагнита контактора пускателя, разорвется, якорь электромагнита под действием пружины отойдет от сердечника, разрывая при этом главные контакты и блок-контакт. Электродвигатель останавливается. В случае перегрузки работающего электродвигателя тепловые реле 1РТ и 2РТ, нагреватели которых включены в силовую цепь электродвигателя, размыкают свои контакты 1РТК и 2РТК, включенные в цепь управления; контактор пускателя отключается, электродвигатель останавливается. В случае короткого замыкания в электродвигателе мгновенно сгорают плавкие вставки предохранителей, отключая двигатель от сети. Магнитный пускатель отключает также электродвигатель от сети при исчезновении напряжения или понижении его ниже 50—70% номинального (электромагнит контактора при этих условиях не может удержать якорь в притянутом к сердечнику положений). Так же читаются и более сложные развернутые схемы.
Монтажные электрические схемы предназначены для использования при изготовлении отдельных устройств, а также для наладки и эксплуатации электрических установок. Монтажные схемы показывают все электрические соединения между выводами отдельных аппаратов данного устройства, а также марку, сечения, способ прокладки проводов, которыми выполняются соединения. Внутренние соединения аппаратов, составляющих устройство, показываются при необходимости.
Основные положения правильного начертания полных принципиальных схем сводятся к следующему:
а) на схеме изображаются рабочие элементы всех аппаратов, входящих в нее;
Таблица 13.2
Некоторые условные обозначения в электрических схемах управления электроприводами
(выдержки из ГОСТ 2725—68, 2727—68, 2728—68, 2730—68, 2732—68)
Наименование | Обозначение по ГОСТу |
1. Катушка индуктивности, дроссель без сердечника |
|
2. Дроссель с ферромагнитным сердечником |
|
8. Вентиль полупроводниковый |
|
4. Сопротивление нерегулируемое |
|
5. Сопротивление регулируемое |
|
6. Сопротивление, регулируемое без разрыва цепи |
|
7. Конденсатор нерегулируемый. Сопротивление емкостное нерегулируемое |
|
8. Конденсатор регулируемый. Сопротивление емкостное регулируемое |
|
9. Обмотка реле, контактора и магнитного пускателя. Общее обозначение |
|









б) отдельные элементы различных аппаратов размещаются не в соответствии с их действительным (территориальным) размещением, а исключительно с точки зрения последовательности действия, наглядности схемы и удобства общей обозреваемости;
в) все элементы одного и того же аппарата обозначаются одинаковыми буквами и цифрами; для отличия разных элементов одного н того же аппарата вводятся различные графические символы;
г) все главные (силовые) цепи вычерчиваются толстыми линиями, а цепи вспомогательные — тонкими;
д) все элементы аппаратов, входящих в схему, изображаются в нормальном положении. Нормальным условно принято считать такое положение, при котором обмотки (катушки) аппаратов не обтекаются током.
В соответствии с этим, участвующие в схеме контакты делятся на замыкающие (з. к.), размыкающие (р. к.) и переключающие (п. к.). При разработке схемы следует учитывать, что при обтекании током обмотки какого-либо аппарата или реле все управляемые ими контакты изменяют свое положение.
В табл. 13.2 приведены основные наиболее часто применяемые условные обозначения элементов аппаратов. В обозначениях контактов условно принято, что при механическом и электрическом воздействии на аппарат (т. е. при переходе аппарата из нормального положения в рабочее) подвижные части контактов движутся сверху вниз или слева направо.
Дальше приводятся примеры схем неавтоматизированного и автоматизированного управления электроприводами строительных машин.
В системах неавтоматизированного электропривода переключения в цепях двигателей осуществляются с помощью аппаратуры ручного управления. Для этой цели используются рубильники, пакетные выключатели, воздушные автоматы, а также контроллеры и другие аппараты.
Продолжение табл. 13.2 
При повороте контроллера в направлении «вперед» замыканием контактов К I и К III соединяется провод Л1 с клеммой двигателя С3 и замыканием контактов KV и KVI — провод Л11 с зажимом С1. При повороте контроллера в направлении «назад» замыканием контактов ΚΙ и КН соединяются Л11 и 2С1 и замыканием KIV и KVI соединяются Л31 и С3. Отключение двигателя производится поворотом контроллера в нулевое положение. Двигатель останавливается также при разрыве цепи аварийного выключателя АВ или при наезде на один из конечных выключателей. При снижении напряжения линейный контактор отпадает и также отключается двигатель от сети (нулевая защита). Схема после этого может быть включена в работу лишь предварительным возвращением контроллера в нулевое положение (нулевая блокировка). Защита двигателя и цепей управления осуществлена плавкими предохранителями и максимальным реле.
Управление неавтоматизированным электроприводом с двигателями переменного и постоянного тока небольшой мощности часто ограничивается включением и отключением вручную пускового аппарата; для ограничения пусковых токов двигателей средней и большой мощности применяются реостаты, а для изменения скорости и направления вращения — контроллеры. Из способов управления такими электроприводами наиболее сложным является способ с применением контроллера.
Схема управления одиночным двигателем с короткозамкнутым ротором с помощью контроллера НТ-53 приведена на рис. 13.7.
В нулевом положении контроллера при замкнутом рубильнике Р кнопкой КР (пусковая кнопка) производится включение линейного контактора Л (создается вспомогательная цепь 11—12— 1—2—14—21). Затем кнопка КР может быть отпущена, и ток будет протекать по параллельной цепи 12—18—5—4— 2—14 —15—16— 21 или 11—18 —3—4 —2—14—15— 16—21. Если механизм не находится в одном из крайних предельных положений, то возможно движение двигателя в обоих направлениях; если же один из конечных выключателей (КВ или КН) разомкнут, то движение возможно лишь в одном направлении, так как при разомкнутом КВ разрывается цепь 18—5—4, а при разомкнутом КН — цепь 18—3—4.
Рис. 13.7. Схема управления, асинхронным электродвигателем с короткозамкнутым ротором с помощью контроллера НТ-53
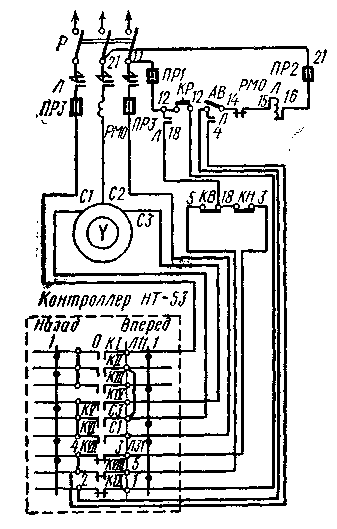
Вся защитная аппаратура, а именно: линейный контактор Л, однополюсное максимальное электромагнитное реле РМО, предохраняющее привод от коротких замыканий, кнопка КР, рубильник Р и плавкие предохранители ПР1 и ПР2 — собраны на одной защитной панели. Параллельно двигателю может быть включен тормозной магнит или электрогидравлический толкатель. В некоторых случаях (тихоходные механизмы со скоростью ниже 30 м/мин) тормозные магниты могут отсутствовать.
В системах автоматического управления электроприводами выполняются весьма разнообразные операции. К основным функциям систем автоматического управления электроприводами можно отнести следующие: пуск электродвигателей в ход, регулирование скорости вращения, реверсирование, торможение и остановка электродвигателей; защита электродвигателей и приводимых ими механизмов от различного рода перегрузок и аварийных режимов; осуществление определенной последовательности операций; сигнализация состояния системы электропривода; автоматическая стабилизация скорости и других параметров электропривода; синхронизация движения отдельных элементов производственных механизмов.
К простейшим схемам автоматического управления электроприводами относятся управление ими с помощью магнитных пускателей. Схема управления асинхронного двигателя с короткозамкнутым ротором с помощью нереверсивного магнитного пускателя приведена на рис. 12.13 и там же приведено описание его действия.
На рис. 12.14 представлена схема управления электродвигателем при помощи реверсивного магнитного пускателя.
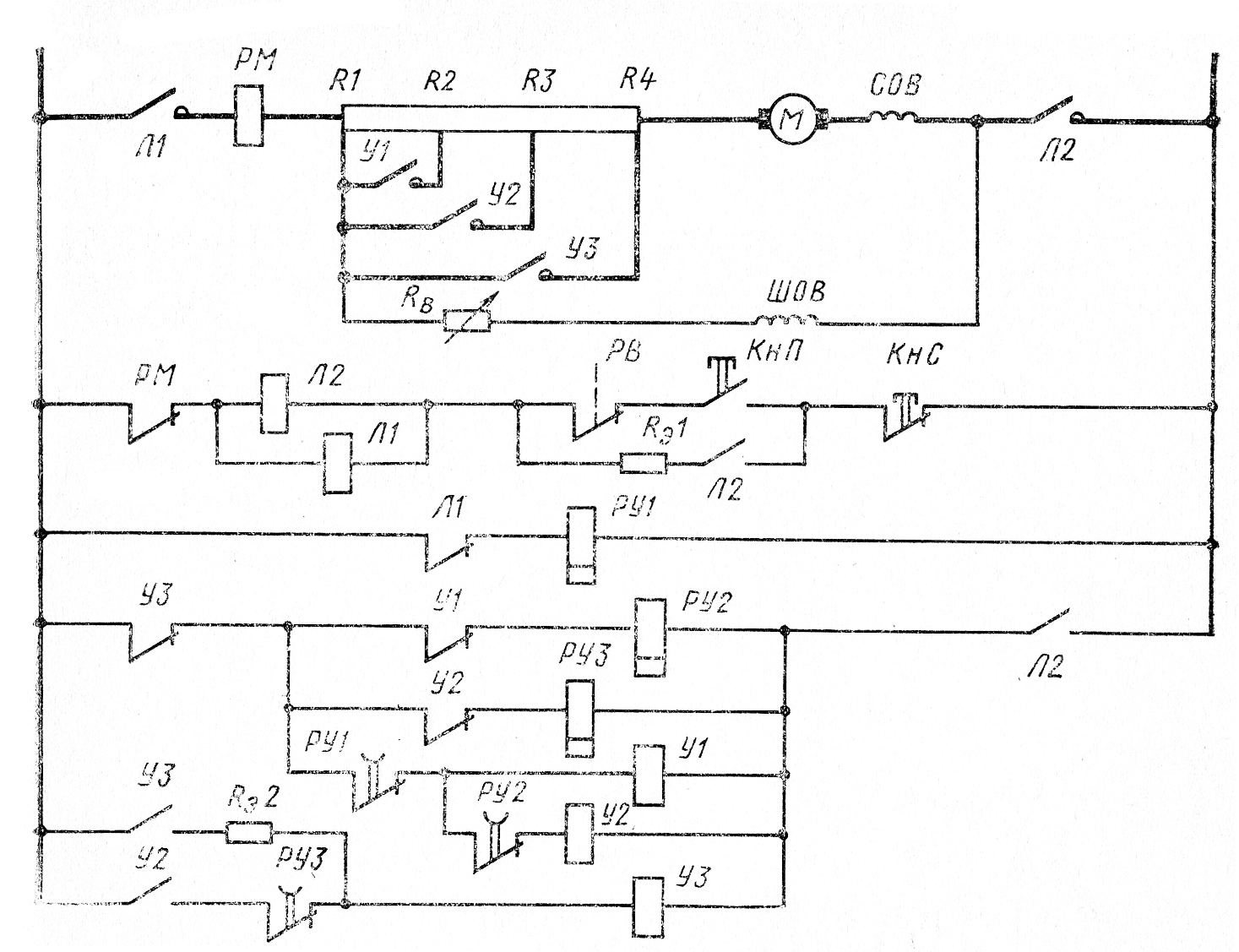
Более сложные схемы автоматизированного электропривода строятся на основе принципов управления электродвигателями; в функциях времени, скорости, тока, пути. Причем в зависимости от принятого принципа выбирают соответствующие схемы и аппараты. Как пример, приводим на рис. 13.8 схему управления электродвигателем с фазным ротором в функции тока. Схемой не предусматривается реверсирования и электрического торможения. Настройка реле ускорения 1РУ, 2РУ и ЗРУ производится таким образом, чтобы токи, при которых соответствующие реле отключаются, удовлетворяли неравенству
Для пуска электродвигателя нажимается кнопка «пуск», вследствие чего включается контактор КЛ, который подает питание на статор электродвигателя, своим замыкающим блок-контактом (з. б. к.) КЛ он шунтирует пусковую кнопку.
Через з. б. к. КЛ получает питание реле РБ, контакты которого, замыкаясь, подсоединяют к сети цепь катушек контакторов ускорения. Однако контакторы ускорения при этом не включаются немедленно, так как размыкающий контакт (р. к.) 1РУ будет открыт до тех пор, пока пусковой ток в роторной цепи не снизится до величины, соответствующей уставке реле 1РУ. После того как контакт 1РУ закроется, сработает контактор ускорения 1У и зашунтирует своими силовыми контактами первую ступень сопротивления в роторной цепи. Аналогично будет работать реле ускорения 2РУ и ЗРУ при меньших уставках тока и соответственно включатся контакторы ускорения 2У и ЗУ, которые выведут вторую и третью ступени сопротивления в роторной цепи, после чего двигатель начнет работать с полной скоростью (естественная характеристика).
тактов реле ускорения, возможной при значениях токов в катушках реле, близких к токам уставок.

Рис. 13.8. Схема управления асинхронным двигателем с контактными кольцами в функции тока
Рис. 13.9. Схема управления асинхронным двигателем с динамическим торможением
В рассматриваемой схеме предусмотрено шунтирование р. к. реле ускорения блок-контактами 1У, 2У, 3У во избежание вибрации, необходимой для того, чтобы ток в роторной цепи достиг значения, при котором реле ускорения открыли бы свои р. к.
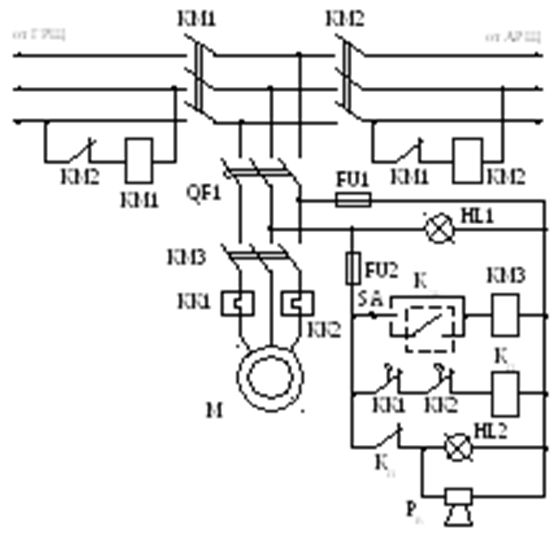
На рис. 13.9 приведена схема автоматического управления асинхронным электродвигателем с динамическим торможением.
Динамическое торможение электродвигателя с короткозамкнутым ротором осуществляется включением обмотки статора двигателя в сеть постоянного тока: при этом магнитный поток, создаваемый постоянным током, взаимодействуя с током ротора, создает тормозной момент. Для этого замыкают рубильники (см. схему). Кнопкой «пуск» подается напряжение на катушку контактора КЛ, и электродвигатель включается в сеть; при этом з. б. к. КЛ замыкает цепь питания катушки реле времени РВ, присоединяя ее к сети постоянного тока.
При включении катушки реле РВ з. к. РВ мгновенно замыкаются в цепи катушки К, но включению контактора К препятствуют разомкнутые р. б. к. КЛ.
Торможение двигателя Д начинается после отключения последнего нажатием кнопки «стоп». При этом: а) катушка КЛ теряет питание и р. к. КЛ замыкается, включая катушку контактора торможения К’, б) катушка реле РВ обесточивается из-за размыкания з. б. к. КЛ и з. к. РВ размыкается с выдержкой времени, по истечении которого происходит автоматическое отключение электродвигателя от сети постоянного тока.
Включению контактора КЛ во время торможения препятствует р. к. К, установленные в цепи питания катушки КЛ.
Сопротивление rт предназначается для ограничения тока намагничивания.
Для торможения электродвигателей в некоторых случаях используется механический колодочный тормоз, управляемый электромагнитом.
Электромагнит получает питание одновременно с двигателем; усилие притяжения якоря преодолевает силу сопротивления пружины тормоза и освобождает колодки, сжимающие шкив двигателя. При отключении электродвигателя катушка электромагнита также обесточивается и тормоз под действием пружины, освобождаемой при опускании якоря, способствует остановке двигателя.
Дистанционное автоматизированное управление сложными электроприводами, в том числе приводами по системе Г-Д (генератор-двигатель, см. § 8.7), применяемыми в механизмах крупных строительных машин, осуществляется с помощью комплектных устройств, называемых станциями управления. Такая станция состоит из отдельных аппаратов управления и защиты: контакторов, автоматов, реле, плавких предохранителей, сопротивлений и др., смонтированных на изоляционных плитах и электрически связанных между собой по той или иной схеме. Станции управления (прежнее название — магнитные станции) поставляются промышленностью в готовом смонтированном виде. Для переключения цепей контакторов станций управления служат или специальные контроллеры облегченного типа, называемые командоконтроллерами, или другие командные аппараты (например, кнопки управления). Комплект из станции управления и командоконтроллера к ней носит название магнитного контроллера.
На рис. 13.10 в качестве примера приведена упрощенная принципиальная схема контакторного управления (регулирования скорости) электропривода по системе Г-Д. Для увеличения напряжения, подаваемого генератором к двигателю, служат контакты КЗ и К4 в цепи обмотки возбуждения (ОВГ) генератора (при их замыкании напряжение и вместе с ним скорость вращения двигателя увеличиваются). Дополнительное регулирование скорости двигателя может производиться c помощью контактов К1 и К2 в цепи возбуждения его обмотки. Изменение направления вращения двигателя достигается изменением направления напряжения генератора переключением контактов IB, 2В (вперед) и 1Н и 2И (назад).
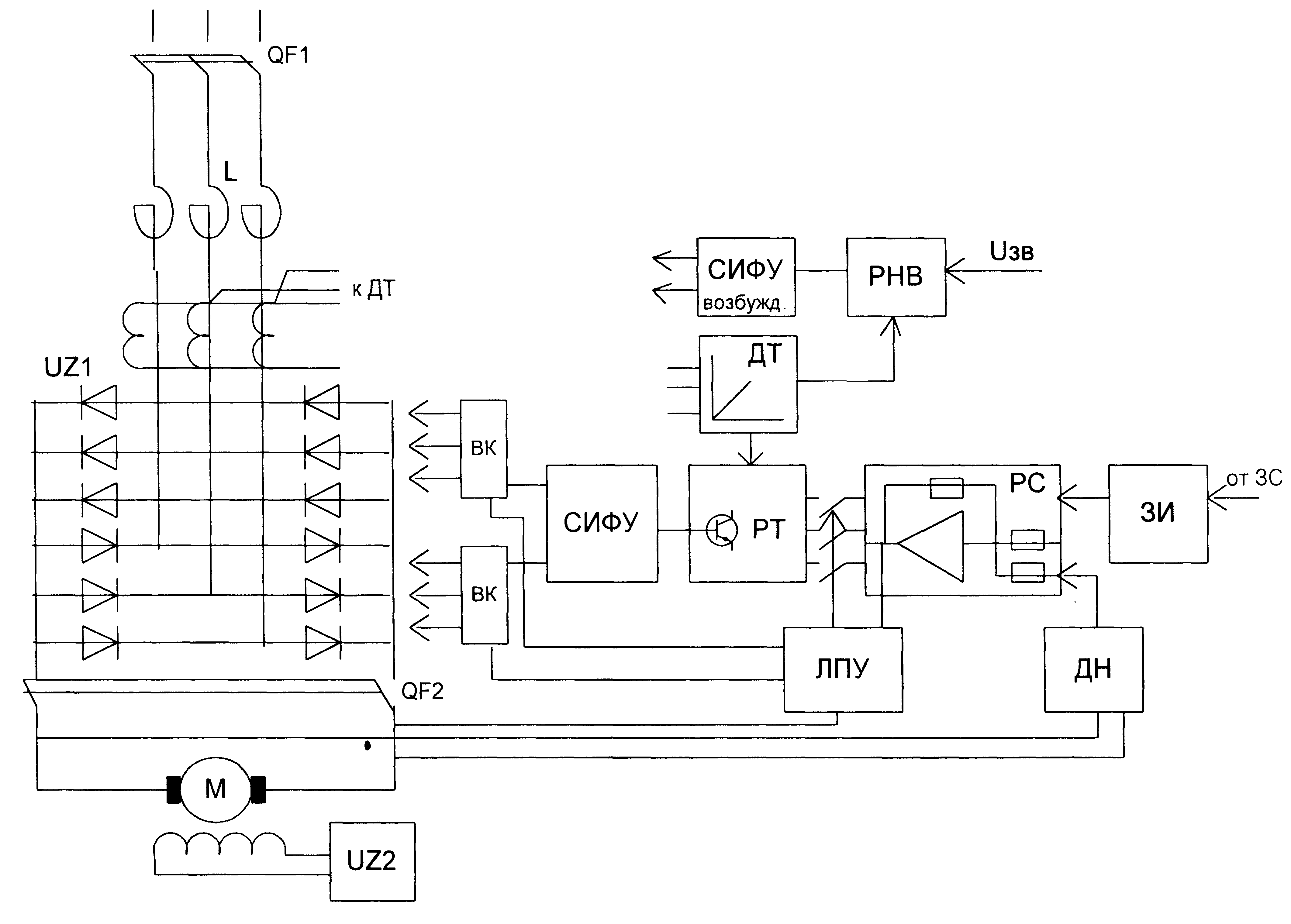
Следует отметить, что электропривод по системе ГД c каждым годом все больше вытесняется такой системой привода, где регулируемое в широких пределах напряжение постоянного тока получается не от машинных преобразователей (двигатель-генераторов), а от управляемых выпрямителей (см. § 11.8). Если для этих целей используется Ионный выпрямитель — на тиратронах или управляемый ртутный, —
то электропривод называют ионным; если же применяется полупроводниковый выпрямитель — на управляемых кремниевых вентилях — тиристорах, то привод называют тиристорным.
В строительстве в последние годы начали применять тиристорный электропривод для механизмов крупных машин. Такой привод по сравнению с приводом по системе Г-Д имеет меньшие размеры и вес. Кремниевые вентили — тиристоры весьма надежны в эксплуатации и не требуют особого ухода. Недостатком тиристорного привода является пониженный коэффициент мощности (cos φ).
Рис. 13.10. Схема системы Г-Д с контакторным управлением
Рис. 13.11. Упрощенная схема тиристорного электропривода
На рис. 13.11 приведена упрощенная принципиальная схема ти· ристорного электропривода. Тиристорный выпрямитель показан работающим по трехфазной «нулевой» (с нулевым выводом) схеме. Между выпрямителем и электродвигателем включен дроссель (для сглаживания пульсаций выпрямленного напряжения).
Управление напряжением на электродвигателе осуществляется специальным устройством, обозначенным на схеме буквами АУ, которое подает напряжение на управляемый электрод, как это указано в § 9.11.
Электропривод и его основные компоненты
Электрический привод, сокращенно электропривод — электромеханическая система, состоящая в общем случае из взаимодействующих преобразователей электроэнергии, электромеханических и механических преобразователей, управляющих и информационных устройств и устройств сопряжения с внешними электрическими, механическими, управляющими и информационными системами, предназначенная для приведения в движение исполнительных органов рабочей машины и управления этим движением в целях осуществления технологического процесса [1].
Функциональная схема электропривода, где ЭП — электрический преобразователь, ИУ — информационное устройство, ЭМП — электромеханический преобразователь (электродвигатель), МП — механический преобразователь, ИО — исполнительный орган.
Основные компоненты
Электродвигатель
Электромеханический преобразователь, предназначенный для преобразования электрической энергии в механическую.
Система управления электропривода
Совокупность управляющих и информационных устройств и устройств сопряжения электропривода, предназначенных для управления электромеханическим преобразованием энергии с целью обеспечения заданного движения исполнительного органа рабочей машины.
Механический преобразователь
Предназначен для передачи механической энергии от электродвигателя к исполнительному органу рабочей машины и согласованию вида и скоростей их движения.
- Вращательный
- Прямолинейный
- Поступательный
- Со сложным движением
Полезная информация
База знаний
Описание разных видов электромеханических преобразователей и электрических машин в частности. Ключевые даты истории создания электродвигателя.
Типовые схемы управления электроприводом
Типовые схемы управления электроприводов с АД
АД с короткозамкнутым ротором малой и средней мощности пускаются прямым подключением к сети без ограничения пусковых токов. Схемы управления АД с фазным ротором средней и большой мощности должны предусматривать ограничение токов при их пуске, реверсе и торможении с помощью добавочных резисторов в цепи ротора.
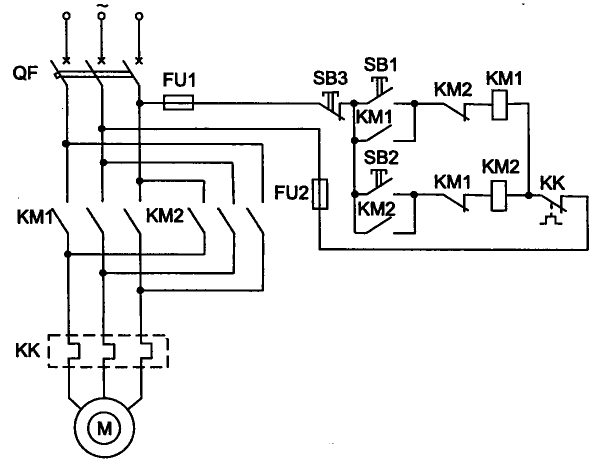
Р еверсивная схема управления АД с короткозамкнутым ротором приведена на рисунке 8.9.
еверсивная схема управления АД с короткозамкнутым ротором приведена на рисунке 8.9.
Рис. 8.9. Реверсивная схема управления АД с короткозамкнутым ротором
Основным элементом этой схемы является реверсивный магнитный пускатель, который включает в себя два линейных контактораКМ1 и КМ2 и два тепловых реле защиты КК. Схема обеспечивает прямой пуск и реверс двигателя, а также торможение противовключением при ручном (неавтоматическом) управлении.
В схеме предусмотрена защита от перегрузок двигателя (реле КК) и коротких замыканий в цепи статора (автоматический выключатель QF) и управления (предохранители FA). Кроме того, схема управления обеспечивает и нулевую защиту от исчезновения (снижения) напряжения сети (контакторы КМ1и КМ2).
Пуск двигателя при включенном автоматическом выключателе QF в условных направлениях «Вперед» или «Назад» осуществляется нажатием соответственно кнопок SB1 или SB2. Это приводит к срабатыванию контактора КМ1 или КМ2, подключению двигателя к сети и его разбегу.
Для реверса или торможения двигателя вначале нажимается кнопка SB3, что приводит к отключению включенного до сих пор контактора (например, КМ1), после чего нажимается кнопка SB2. Это приводит к включению контактора КМ2 и подаче на АД напряжения источника питания с другим порядком чередования фаз. Магнитное поле двигателя изменяет направление вращения на противоположное, и начинается процесс реверса, состоящий из двух этапов: торможения противовключением и разбега в противоположную сторону.
В случае необходимости только торможения двигателя при достижении им нулевой скорости должна быть вновь нажата кнопка SB3, что приведет к отключению двигателя от сети и возвращению схемы в исходное положение. Если кнопка SB3 нажата не будет, то это приведет к разбегу двигателя в другую сторону, т.е. к его реверсу.
Во избежание короткого замыкания в цепи статора, которое может возникнуть в результате одновременного ошибочного нажатия кнопок SB1 и SB2, в реверсивных магнитных пускателях иногда предусматривается специальная механическая блокировка. Она представляет собой рычажную систему, которая предотвращает втягивание одного контактора, если включен другой. В дополнение к механической блокировке в схеме используется типовая электрическая блокировка, применяемая в реверсивных схемах управления. Она предусматривает перекрестное включение размыкающих контактов аппарата КМ1 в цепь катушки аппарата КМ2 и наоборот.
Отметим, что повышению надежности и удобства в эксплуатации способствует использование в схеме воздушного автоматического выключателя QF. Его наличие исключает возможность работы привода при обрыве одной фазы, при однофазном коротком замыкании, как это может иметь место при установке предохранителей, а также он не требует замены элементов (как в предохранителях при сгорании их плавкой вставки).
Схема управления АД, обеспечивающая прямой пуск и динамическое торможение в функции времени, приведена на рис. 8.10.
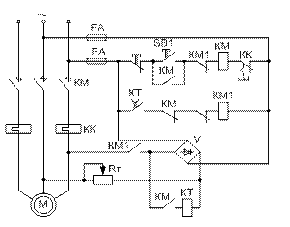
Рис. 8.10. Схема пуска и динамического торможения АД
Пуск двигателя осуществляется нажатием кнопки SB1, после чего срабатывает линейный контактор КМ, подключающий двигатель к источнику питания. Одновременно с этим замыкание контакта КМ в цепи реле времени КТ вызовет его срабатывание и замыкание его контакта в цепи контактора торможения КМ1. Однако последний не срабатывает, так как перед этим разомкнулся в этой цепи размыкающий контакт КМ.
Для остановки двигателя нажимается кнопка SB3, контактор КМ отключается, размыкая свои контакты в цепи статора двигателя и отключая тем самым его от сети переменного тока. Одновременно с этим замыкается контакт КМ в цепи аппарата КМ1 и размыкается контакт КМ в цепи реле КТ. Это приводит к включению контактора торможения КМ1, подаче в обмотки статора постоянного тока от выпрямителя V через резистор Rт и переводу двигателя в режим динамического торможения.
Реле времени КТ, потеряв питание, начинает отсчет выдержки времени. Через интервал времени, соответствующий времени останова двигателя, реле КТ размыкает свой контакт в цепи контактора КМ1, тот отключается, прекращая подачу постоянного тока в цепь статора. Схема возвращается в исходное положение.
Интенсивность динамического торможения регулируется резистором Rт, с помощью которого устанавливается необходимый постоянный ток в статоре двигателя.
Для исключения возможности одновременного подключения статора к источникам переменного и постоянного тока в схеме использована типовая блокировка с помощью размыкающих контактов КМ и КМ1, включенных перекрестно в цепи катушек этих аппаратов.
Схема управления пуском и торможением противовключением АД с фазным ротором в функции ЭДС приведена на рисунке 8.11.

Рис. 8.11. Схема управления пуском и торможением противовключением АД
с фазным ротором
После подачи напряжения включается реле времени КТ, которое своим размыкающим контактом разрывает цепь питания контактора КМ3, предотвращая тем самым его включение и преждевременное закорачивание пусковых резисторов в цепи ротора.
Включение двигателя производится нажатием кнопки SB1, после чего включается контактор КМ1. Статор двигателя подсоединяется к сети, электромагнитный тормоз YB растормаживается, и начинается разбег двигателя. Включение КМ1 одновременно приводит к срабатыванию контактора КМ4, который своим контактом шунтирует ненужный при пуске резистор противовключения Rд2, а также разрывает цепь катушки реле времени КТ. Последнее, потеряв питание, начинает отсчет выдержки времени, после чего замыкает свой контакт в цепи катушки контактора КМ3, который срабатывает и шунтирует пусковой резистор Rд1 в цепи ротора, и двигатель выходит на свою естественную характеристику.
Управление торможением обеспечивает реле торможения KV, контролирующее уровень ЭДС (скорости) ротора. С помощью резистора Rр оно отрегулировано таким образом, что при пуске, когда скольжение двигателя 0 < S < 1, наводимая в роторе ЭДС будет недостаточна для включения, а в режиме противовключения, когда 1 < S < 2, уровень ЭДС достаточен для его включения.
Для осуществления торможения двигателя нажимается сдвоенная кнопка SB2, размыкающий контакт которой разрывает цепь питания катушки контактора КМ1. После этого двигатель отключается от сети и разрывается цепь питания контактора КМ4, и замыкается цепь питания реле КТ. В результате этого контакторы КМ3 и КМ4 отключаются, и в цепь ротора двигателя вводится сопротивление Rд1 + Rд2.
Нажатие кнопки SB2 приводит одновременно к замыканию цепи питания катушки контактора КМ2, который, включившись, вновь подключает двигатель к сети, но уже с другим чередованием фаз сетевого напряжения на статоре. Двигатель переходит в режим торможения противовключением. Реле RY срабатывает и после отпускания кнопки SB2 будет обеспечивать питание контактора КМ2 через свой контакт и замыкающий контакт этого аппарата.
В конце торможения, когда скорость будет близка к нулю и ЭДС ротора уменьшится, реле КV отключится и своим размыкающим контактом разомкнет цепь катушки контактора КМ2. Последний, потеряв питание, отключит двигатель от сети, и схема придет в исходное положение. После отключения КМ2 тормоз УВ, потеряв питание, обеспечит фиксацию (торможение) вала двигателя.
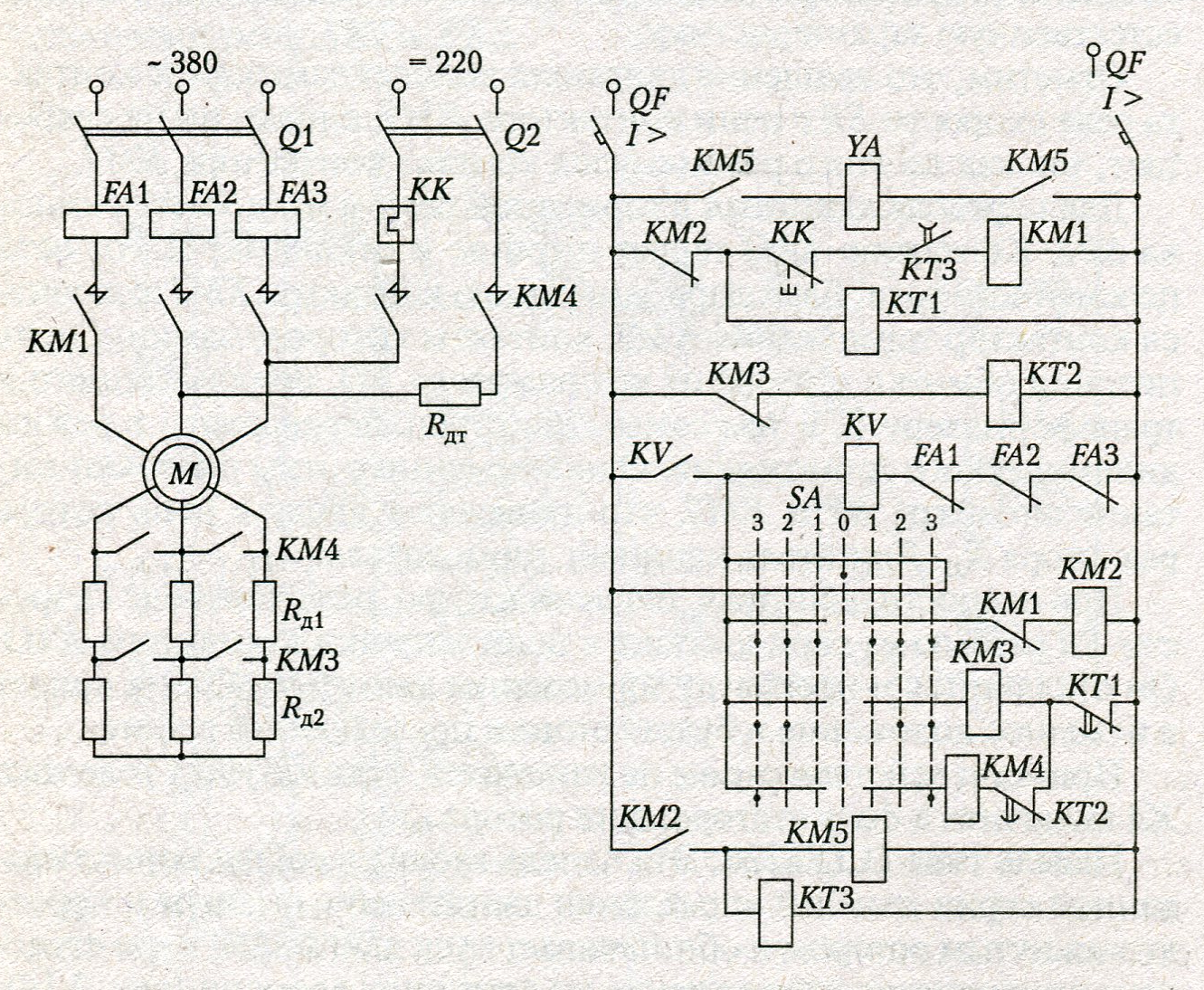
На рисунке 8.12. приведена схема панели типа ПДУ 6220.
Панель типа ПДУ 6220 входит в состав нормализованной серии панелей управления двигателей с фазным и короткозамкнутым ротором и обеспечивает пуск двигателей в две ступени и динамическое торможение по принципу времени.
При подаче на схему напряжений 220 В и переменного тока 380 В (замыкание рубильников QS1 и QS2 и автомата QF) включается реле времени КТ1, чем подготавливается двигатель к пуску с полным пусковым резистором в цепи ротора. Одновременно с этим, если рукоятка командоконтроллера находится в нулевой (средней) позиции и максимально-токовые реле FА1-FА3 не включены, включится реле защиты КV от понижения питающего напряжения и подготовит схему к работе.
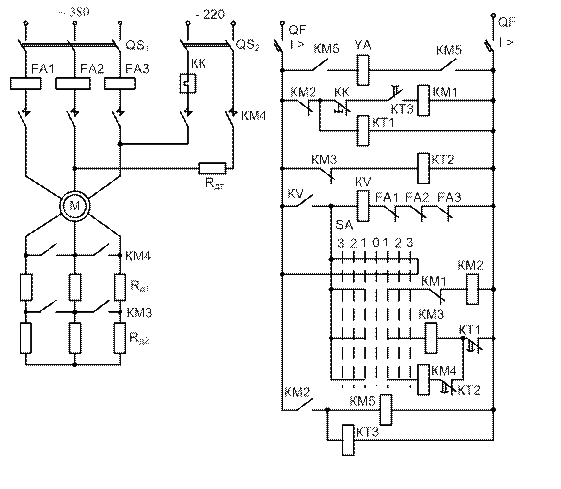
Рис. 8.12. Схема панели типа ПДУ 6220
Пуск двигателя осуществляется по любой из двух искусственных характеристик или естественной характеристике, для чего рукоятка SА должна устанавливаться соответственно в положение 1, 2 или 3. При переводе рукоятки в любое из указанных положений SА включается линейный контактор КМ2, подключающий двигатель к сети, контактор управления тормозом КМ5, подключающий к сети катушку YА электромагнитного тормоза, который при этом растормаживает двигатель и реле времени КТ3, управляющее процессом динамического торможения. При переводе SА в положение 2 или 3 включаются контакторы ускорения КМ3 и КМ4, и двигатель начинает разгоняться.
Торможение двигателя происходит при переводе рукоятки SА в нулевое (среднее) положение. При этом отключатся контакторы КМ2 и КМ5 и включится контактор динамического торможения КМ1, который подключит двигатель к источнику постоянного тока. В результате этого будет идти интенсивный процесс комбинированного (механического и динамического) торможения двигателя, который закончится после отсчета реле КТ3 своей выдержки времени, соответствующей времени торможения.
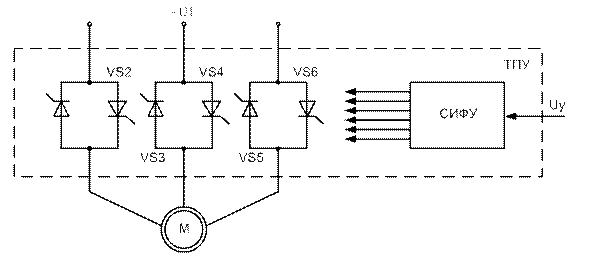
Схема асинхронного электропривода с тиристорным пусковым устройством приведена на рисунке 8.13.
 к ак
к ак
Рис. 8.13. Схема асинхронного ЭП
с тиристорным пусковым устройством
Эффективным методом формирования желаемых графиков изменения тока и момента двигателя в переходных режимах является регулирование напряжения на его статоре с помощью тиристорных пусковых устройств (ТПУ). Чаще всего это делается для ограничения тока и момента двигателя при пуске («мягкий» способ пуска), хотя с помощью этих устройств можно обеспечить и повышение момента двигателя при пуске («жесткий» способ пуска).
Тиристорное пусковое устройство включается между источником питания (сетью переменного тока) с напряжением U1 и статором двигателя. В нереверсивном ТПУ его силовую часть образуют три пары встречно-параллельно включенных тиристоров VS1-VS6, управление которыми осуществляется импульсами напряжения, поступающими на них от системы импульсно-фазового управления (СИФУ). Ограничение тока и момента осуществляется за счет снижения подводимого к двигателю напряжения, что достигается соответствующим изменением во времени угла управления тиристорами. Напряжение при пуске может изменяться по различным законам – линейно нарастать от нуля до сетевого, быть пониженным в течение всего времени пуска или изменяться по так называемому бустерному варианту, при котором для облегчения пуска двигателя на него вначале подается скачком некоторое напряжение, которое затем продолжает нарастать уже по линейному закону. В замкнутой системе может быть обеспечено и поддержание тока статора на заданном уровне.
8.6. Регулирование координат асинхронного двигателя
с помощью резисторов
Данный способ регулирования координат, называемый часто реостатным, может быть осуществлен введением добавочных активных резисторов в статорные или роторные цепи АД (см. рис. 8.14). Он привлекает в первую очередь простотой своей реализации, отличаясь в то же время невысокими показателями качества регулирования и экономичностью.
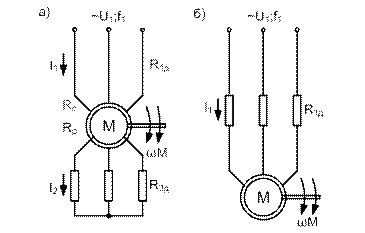
Рис. 8.14. Схемы включения АД с фазным ротором (а)
и с короткозамкнутым ротором (б)
Включение добавочных резисторов R1д в цепь статора применяется главным образом для регулирования (ограничения) в переходных процессах тока и момента АД с короткозамкнутым ротором.
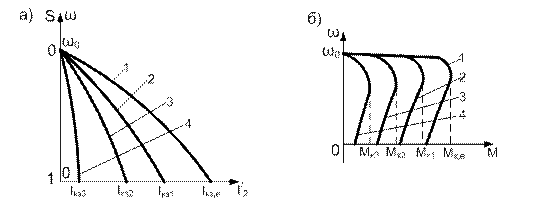
Все искусственные электромеханические характеристики располагаются в первом квадранте ниже и левее естественной. С учетом того, что скорость идеального холостого хода ω0 при включении R1д не изменяется, получаемые искусственные электромеханические характеристики можно представить семейством кривых (рис.8.15 а).
а) б)
Рис.8.15. Электромеханические (а) и механические (б) характеристики АД
при регулировании координат с помощью резисторов в цепи статора
Характеристики 2–4 расположены ниже естественной характеристики 1, построенной при R1д = 0, причем большему значению R1д соответствует больший наклон искусственных характеристик 2-4.
Механические характеристики АД представлены на рисунке 8.15 б.
Координаты точки экстремума Мк и Sк изменяются при варьировании R1д, а именно: в соответствии с (8.15) и (8.16) при увеличении R1д критический момент Мк и критическое скольжение Sк уменьшаются. Уменьшается и пусковой момент.
В то же время искусственные механические характеристики (рис. 8.15б) мало пригодны при регулировании скорости АД: они обеспечивают небольшой диапазон изменения скорости; жесткость характеристик АД и его перегрузочная способность, характеризуемая критическим моментом, по мере увеличения R1дснижается; способ отличает и низкая экономичность. В силу этих недостатков регулирование скорости АД с помощью активных резисторов в цепи его статора применяется редко [2].
Включение добавочных резисторов R2д в цепь ротора применяется как с целью регулирования тока и момента АД, так и его скорости (рис. 8.14а).
Искусственные электромеханические характеристики при R2д = var имеют вид, показанный на рисунке 8.15а, и могут использоваться для регулирования (ограничения ) пускового тока Iкз = Iп .
Скорость идеального холостого хода АД ω0 и максимальный (критический) момент двигателя Мкв соответствии с [2] остаются неизменными при регулировании R2д , а критическое скольжение Sк , как это следует из [2], изменяется.
Выполненный анализ позволяет построить естественную 1 (R2д = 0) и искусственные 2–3 (R2д3> R2д2) характеристики (рис. 8.16) и сделать заключение, что за счет изменения R2д имеется возможность повышать пусковой момент АД вплоть до критического момента Мк без снижения перегрузочной способности двигателя, что весьма важно при регулировании его скорости.
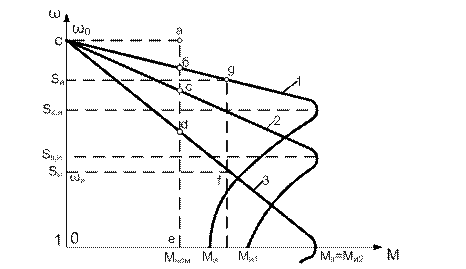
Рис. 8.16. Механические характеристики при различных сопротивлениях R2д добавочного резистора в цепи ротора
В остальном рассматриваемый способ характеризуется такими же показателями, что и для ДПТ НВ. Диапазон регулирования скорости небольшой – около 2–3 – из-за снижения жесткости характеристик и роста потерь по мере его увеличения. Плавность регулирования скорости, которая изменяется только вниз от основной, определяется плавностью изменения добавочного резистора R2д.
Затраты, связанные с созданием данной системы ЭП, невелики, так как для регулирования обычно используются простые и дешевые ящики металлических резисторов. В то же время эксплуатационные затраты оказываются значительными, поскольку велики потери в ПД.
С увеличением скольжения S возрастают потери в роторной цепи, поэтому реализация большого диапазона регулирования скорости приводит к значительным потерям энергии и снижению КПД ЭП.
Регулирование скорости этим способом осуществляется при небольшом диапазоне регулирования скорости или кратковременной работе на пониженных скоростях. Этот способ нашел широкое применение например, в ЭП подъемно-транспортных машин и механизмов.
Расчет сопротивления добавочного резистора R2д может быть выполнен несколькими способами в зависимости от формы задания требуемой искусственной механической характеристики.
Если искусственная характеристика определена полностью, то сопротивление добавочного резистора (например, R2д1) можно определить по выражению [2,4]:
 , (8.30)
, (8.30)
где  – сопротивление фазы ротора АД.
– сопротивление фазы ротора АД.
Если искусственная характеристика задана своей рабочей частью, то можно использовать метод отрезков, для чего на рисунке 8.16 проведена вертикальная линия, соответствующая номинальному моменту Мном, и отмечены характерные точки: а, b, c, d, e. Сопротивление искомого резистора R2д1 определяется как [2,4]
R2д1 = R2номаb/ас, (8.31)
где  – номинальное сопротивление АД;
– номинальное сопротивление АД;  – ЭДС ротора при S = 1;
– ЭДС ротора при S = 1;  –номинальный ток ротора.
–номинальный ток ротора.
http://life-prog.ru/1_17774_tormoznie-rezhimi-ad.html
Схема Управления Электрическим Двигателем — tokzamer.ru
После восстановления нормального напряжения самопроизвольного пуска двигателя не произойдет. Типовые схемы управления АДс фазным ротором.
Схема управления асинхронным двигателем с использованием динамического торможения.
Переключение обмотки на роторе происходит при помощи графитовых щеток, единовременно под напряжением находится только одна из рамок, с магнитным полем, перпендикулярным полю статорной обмотки. При достижении заданного уровня реле снова сработает и разомкнет контакт РДmax.
Схемы управления магнитным пускателем
Контактор К обеспечивает минимальную защиту по напряжению.
Остановка двигателя производится нажатием кнопки SВ3, что вызовет отключение всех контакторов от сети и торможение двигателя выбегом.

Начинается процесс торможения двигателя выбегом под действием момента нагрузки на его валу. На рис.

Это асинхронные двигатели с однофазным или трехфазным питанием и коллекторные устройства.

Сервопривод Устройство позволяет точно контролировать угловое положение, скорость и ускорение исполнительного механизма посредством управления синхронным электродвигателем обычно СДПМ. Регулирование скорости рабочего органа машины или механизма.
схема подключения двигателя по реверсивной схеме
Наша группа «ВКонтакте»
К недостаткам можно отнести риск короткого замыкания при подаче на два входа; двойным H-мостом, собранным на маломощной микросхеме. Но реле не сразу отпускает свой якорь, это произойдет после истечения выдержки времени. Автоматический выключатель F1 исключает возможность обрыва одной фазы от срабатывания защиты при однофазном коротком замыкании, как это бывает при установке предохранителей рис.
Принципы действия схем см. При перегрузках в цепи двигателя возникает повышенный ток, который проходит через тепловые реле РТ1, РТ2.
Схема возвращается в исходное положение.
Именно этот способ сочетает в себе легкость выполнения и достаточные показатели мощности, но не предполагает одновременную подачу на две единицы. Одновременно срабатывает реле Р7, которое своим контактом запитывает соленоидный вентиль СВ — происходит сообщение полости компрессора с магистралью.
Из схемы следует, что в цепь контактора К включен резистор Rэ, он уменьшает напряжение на катушке К и тем самым уменьшает ее нагрев после срабатывания контактора напряжение на нем можно понизить. Фото схем электродвигателя Типовые конфигурации и принципы действия электродвигателей Есть два наиболее распространенных вида моторов, подключение которых можно выполнить без дополнительных деталей.
Шаговый режим работы двигателя создает благоприятные условия наладки.
Проверка проводных выходов и корпуса на короткое замыкание — застрахует от аварий.
Определение начала и конца обмоток трехфазного электродвигателя (простой способ)
См. также: Энергетический паспорт потребителя топливно энергетических ресурсов
Типовые схемы управления электроприводами с асинхронными двигателями
В асинхронных однофазных двигателях обмотка на роторе короткозамкнутая, по конструкции напоминающая колесо для белки.
Для отключения двигателя нажимается кнопка остановки SВ2, контактор КМ теряет питание и отключает двигатель от сети. Для исключения возможности одновременного подключения статора к источникам переменного и постоянного тока в схеме использована типовая блокировка с помощью размыкающих контактов КМ и КМ1, включенных перекрестно в цепи катушек этих аппаратов. После запуска двигателя M1 должны установиться нормальные параметры рассола и охлаждающей воды, о чем сигнализируют контакты: ДТР датчик температуры рассола ; РР реле расхода рассола ; РД реле давления, размыкает свой контакт в том случае, если давление в магистрали слишком понизится или повысится.
При этом отключается и выключатель М2. Для управления приводами применяются электрические коммутационные аппараты, такие как автоматические и неавтоматические выключатели, контакторы и магнитные пускатели.
Схемы автоматизированного управления На рис. Электрические блокировки для предотвращения одновременного включения двух контакторов осуществляются с помощью размыкающих контактов КM1 и КM2 рисунок 6, б. Вторым замкнувшимся контактом Р1 включается электромагнитный клапан продувания ЭМП.
Воздушный зазор между индуктором и якорем составляет всего 1 мм. В нормальном отключенном состоянии ротор электродвигателя расторможен под действием пружинного привода. Точка П является точкой трогания. В случае остановки электродвигателя М1 этот же контакт произведет автоматическое отключение двигателя М2.
Поиск по блогу
При перегрузках реле максимального тока РМ срабатывает и своим контактом выключает Л1, Л2. Схема одноступенчатого пуска АД в функции тока и динамического торможения в функции частоты вращения Схема рис.
Эта защита называется нулевой или нулевым блокированием. При снижении уровня жидкости в расходной цистерне ниже минимального замыкается реле РДmin.
При необходимости самостоятельного пуска электродвигателя при опробовании механизма в цепи управления имеется выключатель Q3, который необходимо предварительно замкнуть. На фото — схема подключения такого электродвигателя к питанию В через простой замыкающий выключатель. Главными недостатками асинхронных двигателей с короткозамкнутым ротором являются большие пусковые токи в раз больше номинального и невозможность простыми методами плавно изменять скорость вращения двигателей.
Схема управления двигателем с двух и трех мест
Схемы управления электроприводами
Cхема электропривода холодильной фреоновой установки На рис.
В случае, если одна из электрифицированных задвижек окажется неисправной, промежуточное реле PIT разрывает цепи автоматического управления насосными агрегатами гидроэлеваторов.
Для подключения к сети с одной фазой необходимо наличие переходного конденсатора, но в этом случае будут потери мощности и скорости оборотов двигателя. На выходе логической схемы включены командные реле, которые подают команды в схему управления электроприводами механизмов автоматического штабелера. В конце торможения, когда частота вращения будет близка к нулю и ЭДС ротора уменьшится, реле КV отключится и своим размыкающим контактом разомкнет цепь катушки контактора КМ2.
Но эти аппараты при своей простоте и надежности являются аппаратами ручного управления. Двигатель получает пониженное напряжение. При этом отключается и выключатель М2. При отключении обмоток статора от сети ротор электродвигателя с рабочим механизмом, например дисковой пилой шпалорезного станка, продолжает сравнительно долгое время вращаться по инерции.
См. также: Электролаборатория регистрация
Эти схемы нашли широкое применение для управления нереверсивными электроприводами транспортеров, воздуходувок, вентиляторов, насосов, лесоперерабатывающих и заточных станков. После запуска двигателя M1 должны установиться нормальные параметры рассола и охлаждающей воды, о чем сигнализируют контакты: ДТР датчик температуры рассола ; РР реле расхода рассола ; РД реле давления, размыкает свой контакт в том случае, если давление в магистрали слишком понизится или повысится. В дополнение к механической блокировке в схеме используется типовая электрическая блокировка, применяемая в реверсивных схемах управления. Если температура в помещениях поднимается выше установленной, замыкается контакт ДОТ, срабатывает реле Р2 и происходит пуск компрессора.
При нажатии каждой из кнопок цепь одного из пускателей замыкается, а цепь другого одновременно при этом размыкается. В соответствии с правилами технической эксплуатации грузоподъемных механизмов в отключенном состоянии привод и механизм подъема должны быть надежно заторможены. Схема включает блок управления тиристорами БУ и релейно-контактный узел управления. Нажатие кнопки SВ2 приводит одновременно к замыканию цепи питания катушки контактора КМ2, который, включившись, вновь подключает двигатель к сети, но уже с другим чередованием фаз сетевого напряжения на статоре. Пуск начинается после перемещения контактной щетки на вывод 1.
Также рекомендуем прочесть
Анимация процессов, протекающих в схеме с двумя пускателями показана ниже. Статор электродвигателя и обмотка электромагнита Y одновременно будут присоединены к сети. Для этого в цепь управления магнитного пускателя КМ2, осуществляющего пуск и остановку электродвигателя М2, включен замыкающий вспомогательный контакт КМ1, связанный с пускателем КМ1. Это позволяет снизить расход электроэнергии и износ мотора, предотвращает перегрев и дает ряд дополнительных возможностей для подключения автоматики.
Одновременно НО контакт реле РП сигнализирует на диспетчерский пункт. Для его ускорения ванну печи поворачивают относительно оси на 40 влево и вправо и в каждом из крайних положений производят проплавле-ние новых колодцев, что в конечном итоге приводит к обвалу шихты в печи и ускорению наиболее тяжелого с энергетической точки зрения режима расплавления шихты. При нажатии на кнопку первым отключается размыкающий контакт, а затем включается замыкающий. В этом случае он подключается от двух любых фаз, например, от А и B. Переключатель может иметь несколько положений для выбора различных способов подключения электродвигателя, что может позволить уменьшить пусковое напряжение, выбирать направление и скорость вращения.
Как читать Элекрические схемы
Автоматическое управление электроприводом
Основная функция автоматического управления электроприводом — запуск электродвигателя, остановка, торможение, реверсирование, поворот на определенный угол механизма в зависимости от времени или пути. В практике управления электроприводами известно большое количество схем, которые отражают многообразие требований, предъявляемых к электроприводу различных производственных машин. Однако различия в схемах часто не являются принципиальными, так как даже самые сложные из них представляют собой сочетание некоторого ограниченного числа стандартных узлов и простейших цепей, связывающих эти узлы.
1. Управление включением асинхронных электродвигателей с короткозамкнутым ротором
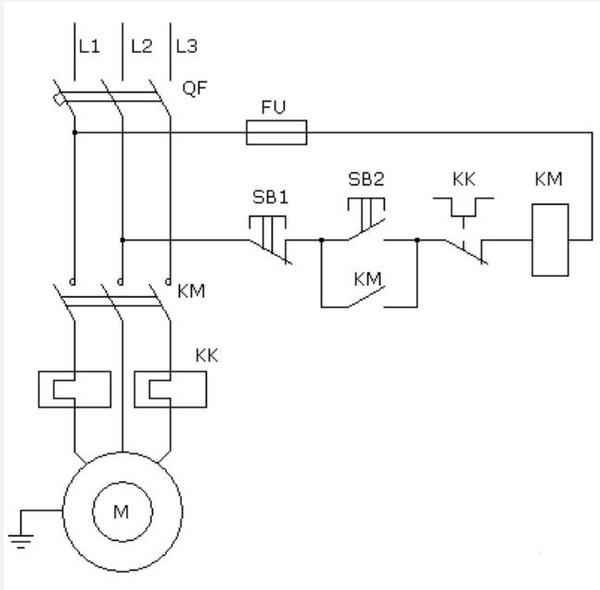
Схема управления с помощью магнитного пускателя (рис. 1). Магнитные пускатели широко применяют для пуска асинхронных электродвигателей мощностью до 75 кВт. Они обеспечивают дистанционный пуск, остановку, нулевую защиту и, с помощью теплового реле, защиту от перегрузок двигателя. При нажатии кнопки «Пуск» главные контакты ПМ включают двигатель; блок — контакты ПМ шунтируют кнопку «Пуск»; для отключения нужно нажать кнопку «Стоп».
Схема управления с помощью реверсивного магнитного пускателя (рис. 2). В тех случаях, когда в процессе работы необходимо изменять направление вращения электродвигателя, применяют реверсивные магнитные пускатели. Такой пускатель состоит из двух нереверсивных, помещенных в один кожух и имеющих блокировку (размыкающие контакты Н и В) от возможности одновременного включения главных контактов в цепи двигателя.
Для лучшей блокировки от возможности одновременного включения обеих пускателей применяются кнопки с нормально замкнутыми и нормально разомкнутыми контактами. При нажатии кнопки «Вперед» одновременно размыкаются контакты «Назад» (рис. 3).
Схема управления с динамическим торможением (рис. 4). Для быстрого торможения в обмотку статора подается постоянный ток. При нажатии кнопки «Стоп» отключается контактор П и включается контактор Т. С последним связано маятниковое реле, которое с выдержкой времени размыкает свой размыкающий контакт. Контактор Т отключает питание двигателя постоянным током.
Схема управления с переключением при пуске обмотки со «звезды» на «треугольник» (рис. 5). При нажатии кнопки «Пуск» включается линейный контактор КЛ и получает питание катушка реле времени РВ, размыкающий блок-контакт которого включает катушку контактора К3.
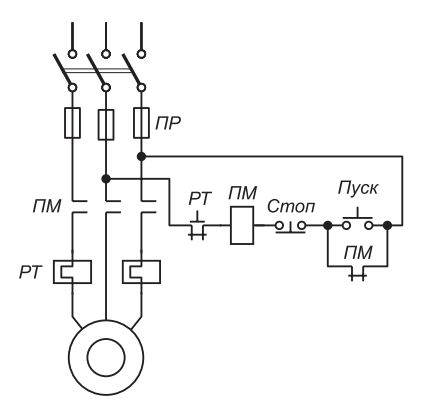
Рис. 1. Схема управления асинхронным электродвигателем при помощи магнитного пускателя
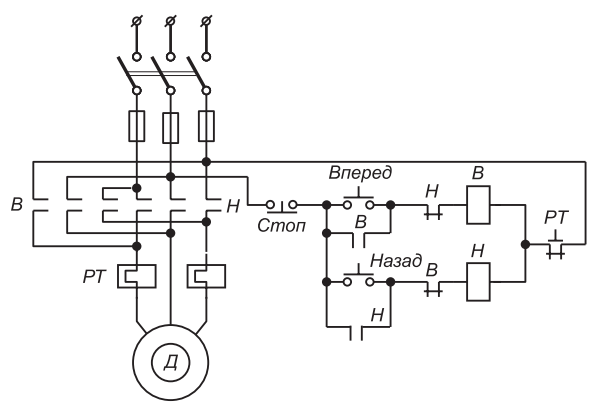
Рис. 2. Схема управления асинхронным электродвигателем при помощи реверсивного магнитного пускателя
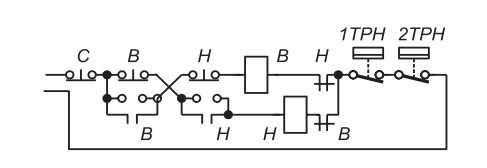
Рис. 3. Схема управления реверсивным пускателем с блокировочными кнопками
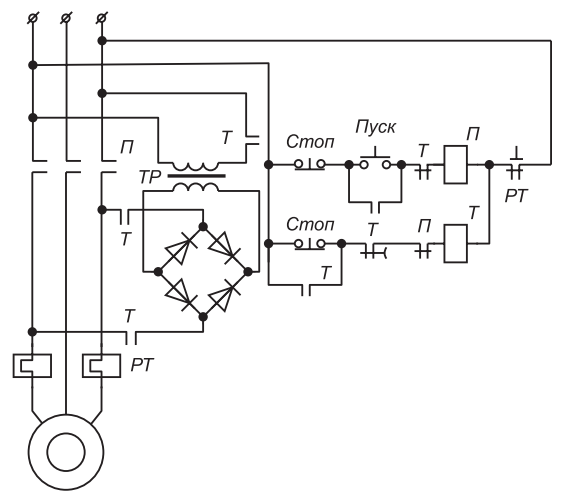
Рис. 4. Схема управления асинхронным электродвигателем с динамическим торможением
При этом размыкается блок-контакт К3 в цепи катушки КТ. Двигатель разгоняется при включении обмоток цепи в «звезду». Через 5—10 с (в зависимости от установленной выдержки времени) размыкается замыкающий контакт реле времени РВ. Это приводит к отключению контактора К3 и включению контактора КТ. Одновременное включение контакторов К3 и КТ исключается размыкающим блок-контактом К3.
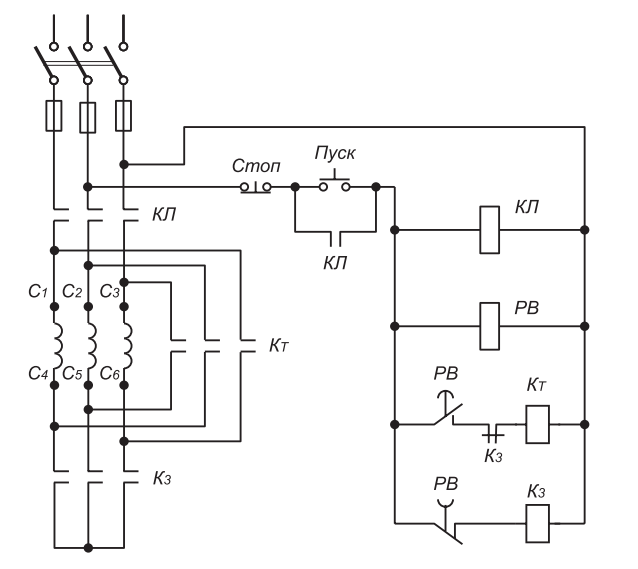
Рис. 5. Схема управления асинхронным электродвигателем с переключением при пуске обмотки статора со «звезды» на «треугольник»
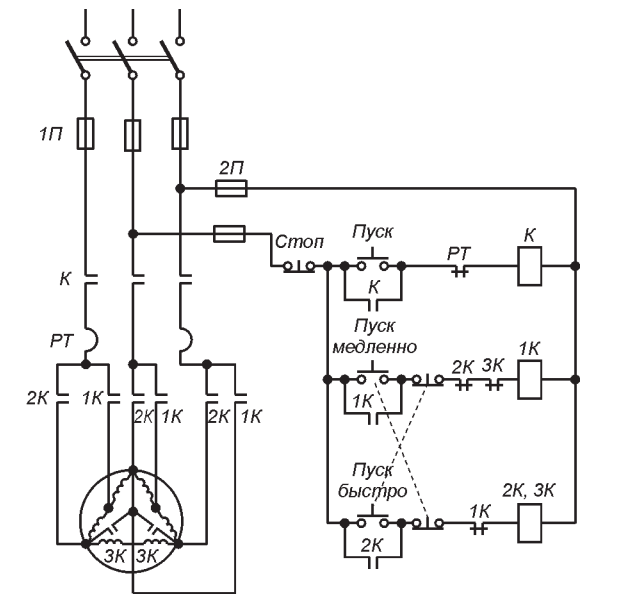
Рис. 6. Электрическая схема управления двухскоростным асинхронным электродвигателем
Схема управления двухскоростным асинхронным электродвигателем (рис. 6). Конструкция многоскоростного асинхронного электродвигателя позволяет изменять число полюсов обмотки статора. Изменение числа пар полюсов меняет скорость вращения асинхронного электродвигателя. Для производственных механизмов, требующих две скорости вращения, отличающиеся в два раза, применяют двухскоростные асинхронные электродвигатели. Нажимая кнопку «Пуск», включают контактор К, который своими главными контактами подготавливает цепь включения статора двигателя. Воздействуя на кнопку
«Пуск медленно», включают контактор 1К, который подключает обмотку статора, соединенную в треугольник. Если необходимо увеличить скорость, нажимают кнопку «Пуск быстро». Образуется замкнутая цепь питания параллельно включенных катушек 2К и 3К. При этом число пар полюсов уменьшается вдвое, и электродвигатель вращается с большей скоростью.
Схема управления реверсивным двухскоростным электродвигателем (рис. 7). Нажатием кнопок «Пуск 1» или «Пуск 2» устанавливают необходимую частоту вращения при соединениях обмоток двигателя в «треугольник» или в «двойную звезду». Контакторы В или Н включаются нажатием кнопок
«Пуск вперед» или «Пуск назад». Двухцепные кнопки позволяют осуществить дополнительную блокировку, исключающую одновременное включение контакторов В, Н и 1К, 2К.
Торможение асинхронного электродвигателя противовключением (рис. 8). При торможении противовключением электродвигатель включается на время торможения в сеть с соединением обмоток статора с противоположным направлением вращения. При этом необходимо, чтобы двигатель отключился от сети в момент достижения скорости вращения, близкой к нулю.
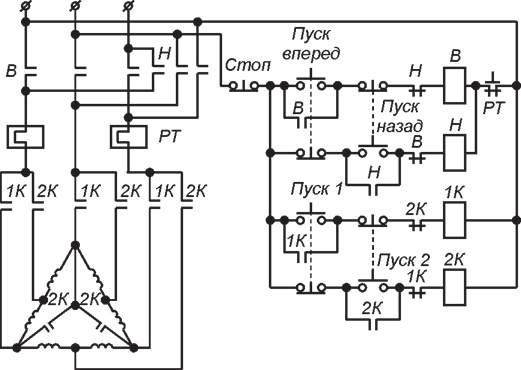
Рис. 7. Схема управления реверсивным двухскоростным электродвигателем
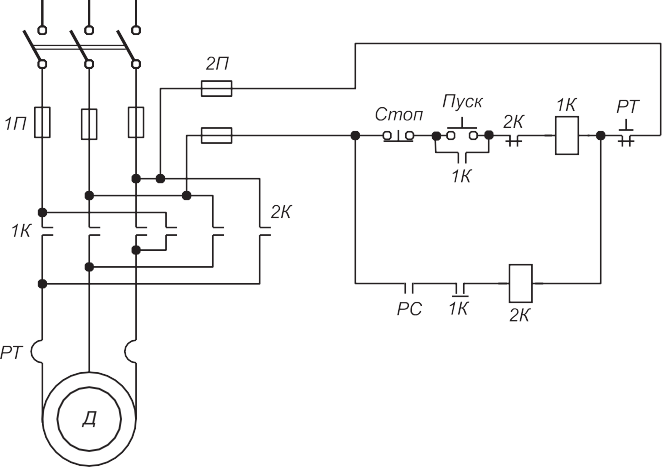
Рис. 8. Торможение асинхронного короткозамкнутого электродвигателя противовключением
Для этого в цепь катушки контактора 2К включены замыкающие контакты реле контроля скорости РС, работающего от вала двигателя. При работе двигателя эти контакты замкнуты, а размыкающие контакты контактора 1К разомкнуты и контактор торможения 2К отключен. В режиме торможения, когда нажата кнопка «Стоп», катушка 1К обесточивается, электродвигатель отключается от сети. Одновременно размыкающий дополнительный контакт 1К замыкается и включает контактор торможения 2К. При достижении скорости, близкой нулю, реле РС срабатывает, его контакт отключает цепь питания контактора 2К и двигатель затормаживается.
Схема управления реверсивным электродвигателем с торможением противовключением и использованием реле контроля скорости (рис. 9). При нажатии кнопок «Вперед» или «Назад» замыкаются соответственно цепи катушек контакторов В или Н, срабатывают их контакты, статор двигателя подключается к сети, ротор начинает вращаться.
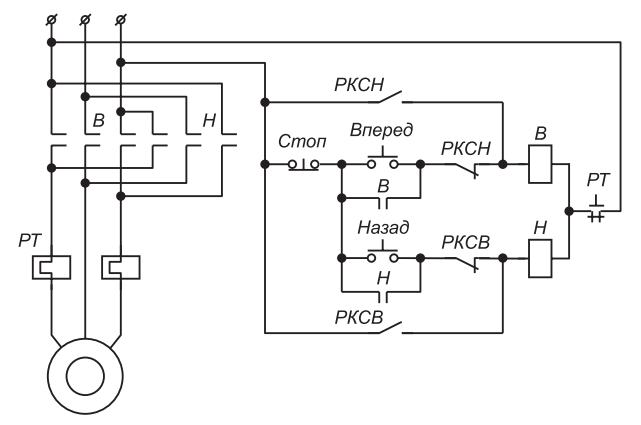
Рис. 9. Схема управления реверсивным электродвигателем с торможением противовключением
Одновременно с началом вращения приводится в действие вал реле контроля скорости и замыкаются соответствующие контакты реле РКСВ или РКСН, которые подготавливают цепи катушек контакторов «Вперед» или «Назад» к работе (при работе двигателя в режиме «Вперед» подготавливается к работе цепь катушки контактора
«Назад», и наоборот). При остановке двигателя, когда нажата кнопка «Стоп», разрывается цепь работающей катушки («Вперед» или «Назад»), главные контакты отключают двигатель от сети, а блок-контакты замыкают цепь катушки контактора «Назад» в том случае, когда двигатель работал вращаясь «Вперед», и наоборот. Таким образом, двигатель переключается в реверсивный режим, однако по инерции продолжает вращаться в прежнем направлении, работая в тормозном режиме противовключения. Из-за действия тормозного момента частота вращения ротора постепенно снижается и при достижении частоты, близкой к нулю, контакты реле контроля скорости размыкают цепи катушек контакторов
«Вперед» или «Назад» и отключают статор двигателя от сети.
2. Управление электроприводами с асинхронными электродвигателями с фазным ротором
Схема управления в функции времени (рис. 10). Эта схема является типичной для двигателей длительного режима с использованием маятниковых реле времени. При нажатии кнопки «Пуск» включается контактор Л. При включении контактора Л начинает работать маятниковое реле, которое через заданный промежуток времени включит своими контактами контактор 1У. Далее процесс повторяется. Замыкающий блок-контакт Л (1—2) предназначен для облегчения работы контактов маятникового реле.
Схема управления в функции времени с несколькими реле времени (рис.11).
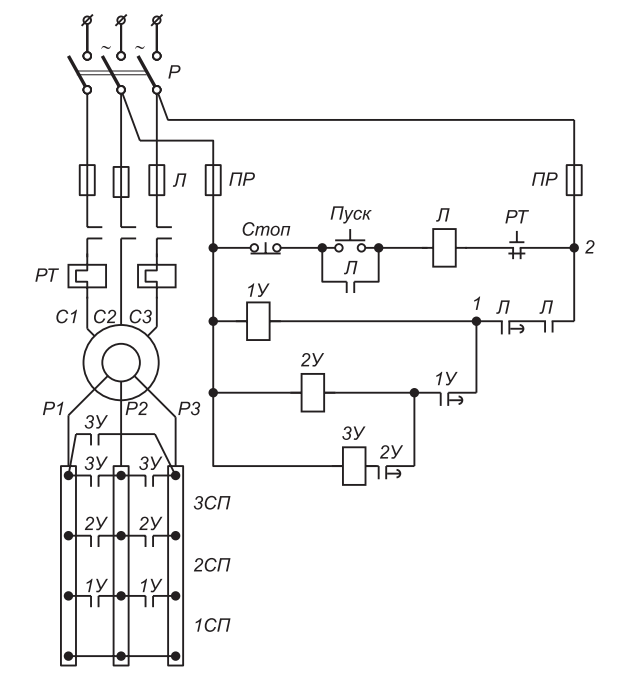
Рис. 10. Схема управления асинхронным электродвигателем с фазным ротором в функции времени
Асинхронный электродвигатель с фазным ротором пускают с помощью пусковых реостатов, состоящих из нескольких ступеней, включаемых в фазы обмоток ротора.
При нажатии на кнопку «Пуск» катушка магнитного пускателя ПМ получает питание, и электродвигатель включается на полное сопротивление пускового реостата. Одновременно включается реле времени 1РВ, которое через выдержку времени, достаточную для разгона двигателя на этой ступени, включает контактор 1К, и он своими контактами закорачивает первую ступень пускового реостата. Блок-контакты контактора блокируют катушку 1К и отключают реле времени 1РВ.
Включается одновременно с катушкой 1К реле времени 2РВ, которое через заданную выдержку времени включает второй контактор 2К, а он отключает вторую ступень пускового реостата. Третья ступень пускового реостата отключается аналогично.
Необходимо обеспечивать выбор правильных выдержек времени реле 1РВ, 2РВ и 3РВ. Чрезмерно большие выдержки времени затягивают процесс пуска, а заниженные — не обеспечивают разгон до нужной скорости и вызывают повышенные броски тока. При нажатии на кнопку «Стоп» электродвигатель отключается, и все ступени пускового реостата включаются по фазам ротора.
Схема управления в функции тока (рис. 12). В роторную цепь включены катушки токовых реле ускорения 1РУ, 2РУ, 3РУ, настроенные на срабатывание при токах I1РУ, I2РУ, I3РУ. Контактор 1У включается при спаде силы пускового тока в роторной цепи до значения, соответствующего уставке реле 1РУ.
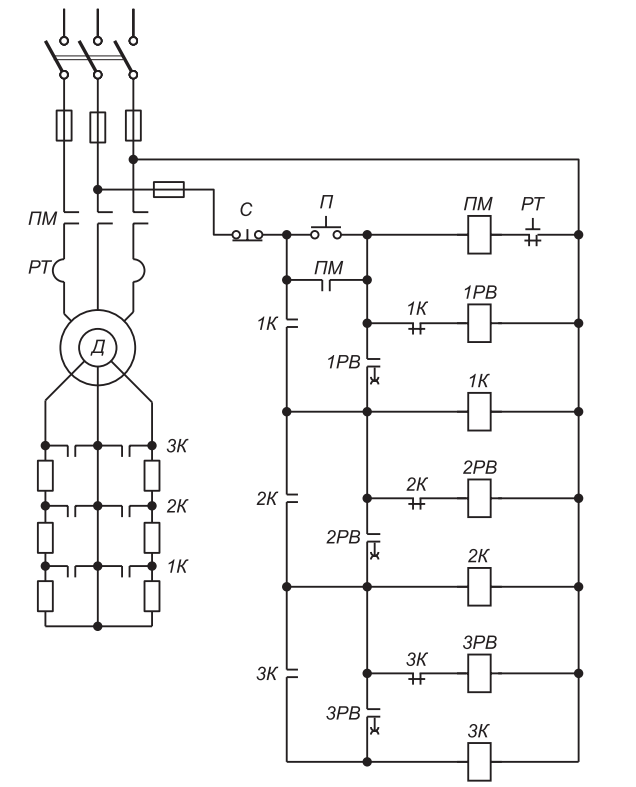
Рис. 11. Электрическая схема управления асинхронным электродвигателем с фазным ротором
При большей силе тока в цепи ротора размыкающий контакт 1РУ будет разомкнут. Реле ускорения 2РУ и 3РУ, контакторы 2У и 3У работают так же. Из-за возможности вибраций размыкающих контактов реле ускорения 1РУ, 2РУ и 3РУ предусмотрено их шунтирование размыкающими блок-контактами 1У, 2У и 3У. Реле блокировки РБ создает выдержку времени, пока сила тока в роторной цепи не достигнет значения, при котором сработает реле ускорения.
Схема управления в функции частоты (рис. 13). Работа этой схемы обеспечивается с помощью частотных реле 1ЧР, 2ЧР и 3ЧР, катушки которых включены в цепь ротора. Магнитный поток реле создается совместным действием магнитодвижущих сил катушки и короткозамкнутого витка (гильзы). При пуске, т.е. при большой частоте переменного тока в роторе двигателя, размагничивающее действие тока, протекающего по витку, будет велико, и магнитный поток реле будет относительно мал. При уменьшении частоты тока в роторе магнитный поток реле возрастает, так как происходит уменьшение тока в короткозамкнутом витке. При каком-то определенном значении частоты якорь притягивается и замыкает контакты реле частоты (1ЧР, 2ЧР и 3ЧР) в цепи контактора ускорения (1У, 2У и 3У). При оживлении током катушки контактора ускорения происходит шунтирование его контактами соответствующей ступени пускового сопротивления, включенного в цепь ротора. Частотные реле должны быть настроены на определенные частоты.

Рис. 12. Схема управления асинхронным электродвигателем с фазным ротором в функции силы тока
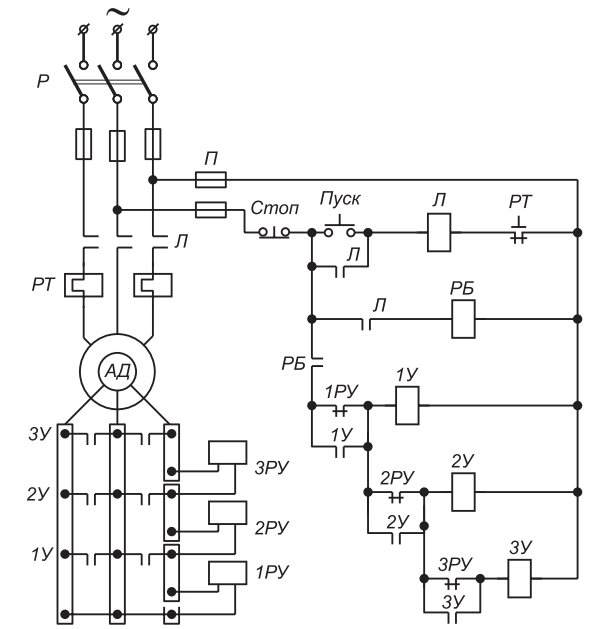
Рис. 13. Схема управления асинхронным электродвигателем с фазным ротором в функции частоты
Типовые схемы управления электроприводами с асинхронными двигателями
Типовые схемы релейно-контакторного управления асинхронными двигателями (АД) строятся по тем же принципам, что и схемы управления двигателями постоянного тока.
-
Типовые схемы управления ад с короткозамкнутым ротором
Двигатели этого типа малой и средней мощности обычно пускаются прямым подключением к сети без ограничения пусковых токов. В этих случаях они управляются с помощью магнитных пускателей, которые одновременно обеспечивают и некоторые виды их защиты.
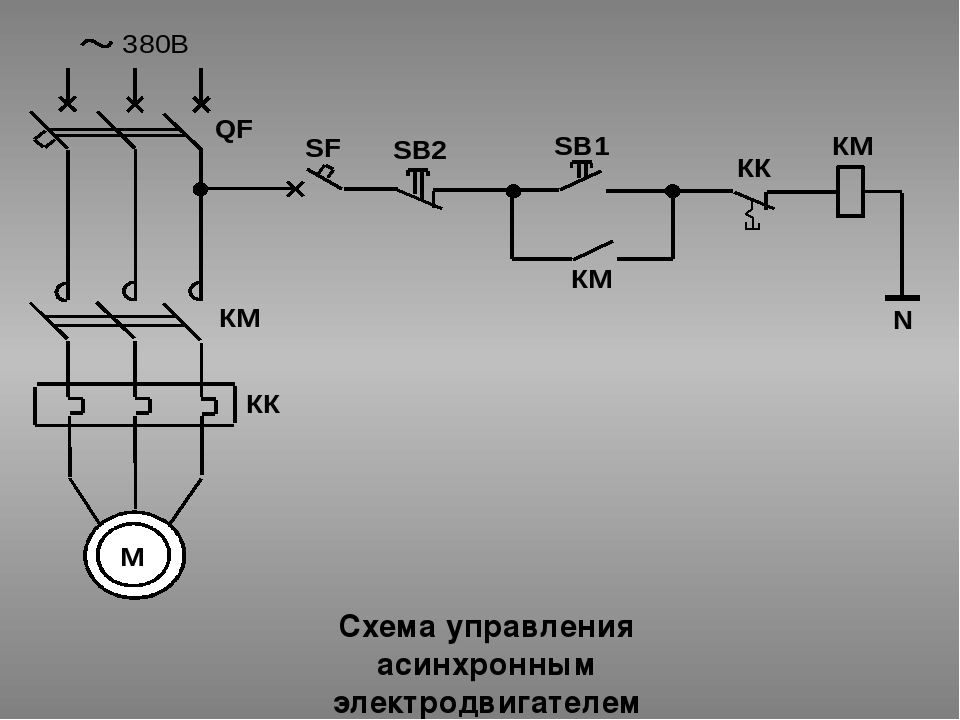
Схема управления асинхронным двигателем с использованием магнитного пускателя (рис. 2.1) включает в себя магнитный пускатель, состоящий из контактора КМ и трех встроенных в него тепловых реле защиты КК. Схема обеспечивает прямой (без ограничения тока и момента) пуск двигателя, отключение его от сети, а также защиту от коротких замыканий (предохранители FА) и перегрузки (тепловые реле КК).
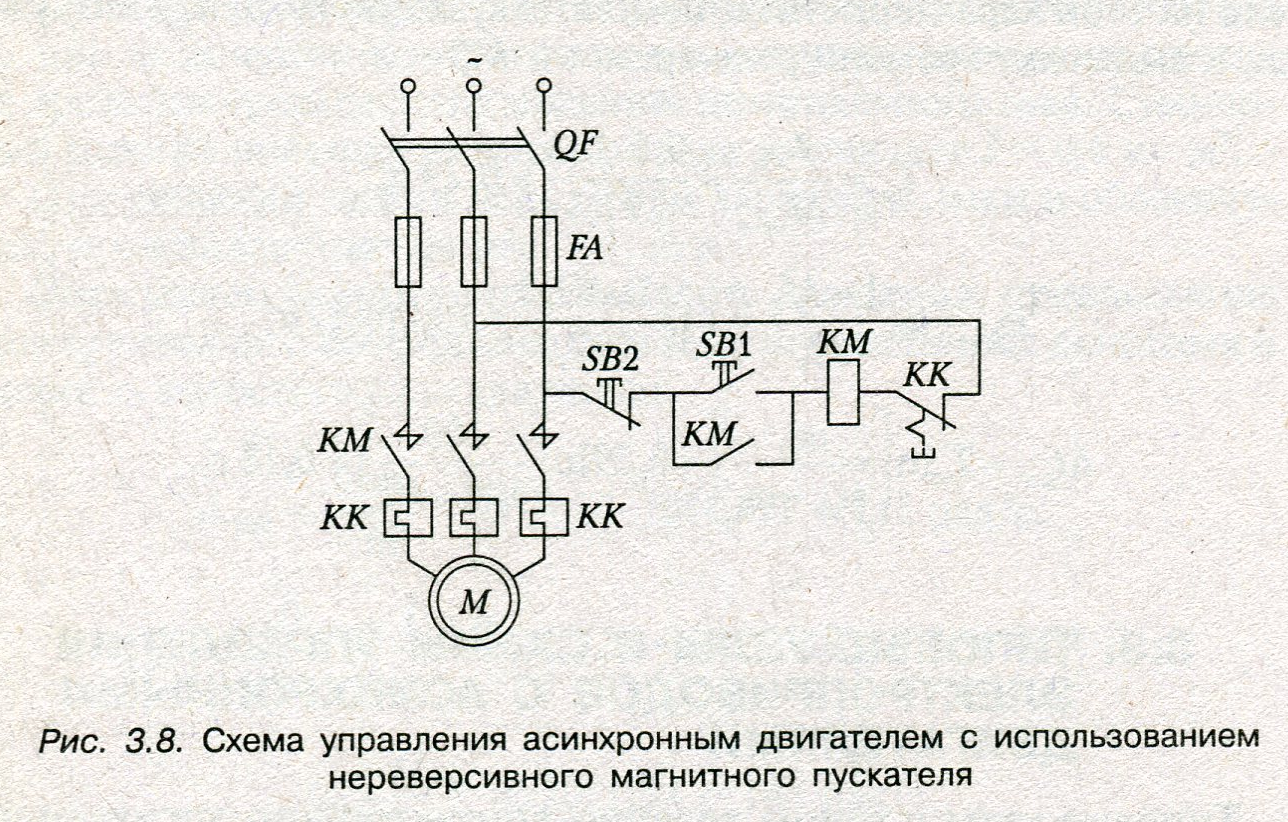
Рис. 2.1. Схема управления АД с использованием
нереверсивного магнитного пускателя
Для пуска двигателя замыкают выключатель QF и нажимают кнопку пуска SВ1. Получает питание катушка контактора КМ, который, включившись, своими главными силовыми контактами в цепи статора двигателя подключает его к источнику питания, а вспомогательным контактом шунтирует кнопку SВ1. Происходит разбег двигателя по его естественной характеристике. Для отключения двигателя нажимается кнопка остановки SВ2, контактор КМ теряет питание и отключает двигатель от сети. Начинается процесс торможения двигателя выбегом под действием момента нагрузки на его валу.
-
Реверсивная схема управления ад.
Основным элементом этой схемы является реверсивный магнитный пускатель, который включает в себя два линейных контактора КМ1 и КМ2 и два тепловых реле защиты КК (рис. 2.2). Схема обеспечивает прямой пуск и реверс двигателя, а также торможение противовключением при ручном (неавтоматическом) управлении.

Рис. 2.2. Схема управления АД с использованием реверсивного магнитного пускателя
В схеме предусмотрена защита от перегрузок двигателя (реле КК) и коротких замыканий в цепи статора (автоматический выключатель QF) и управления (предохранители FА). Кроме того, схема управления обеспечивает и нулевую защиту от исчезновения (снижения) напряжения сети (контакторы КМ1 и КМ2).
Пуск двигателя при включенном QF в условных направлениях «Вперед» или «Назад» осуществляется нажатием соответственно кнопок SВ1 или SВ2. Это приводит к срабатыванию контактора КМ1 или КМ2, подключению двигателя к сети и его разбегу.
Для реверса или торможения двигателя вначале нажимается кнопка SВЗ, что приводит к отключению включенного до сих пор контактора (например, КМ1), после чего нажимается кнопка SВ2.
Это приводит к включению контактора КМ2 и подаче на АД напряжения источника питания с другим порядком чередования фаз. Магнитное поле двигателя изменяет свое направление вращения на противоположное, что приводит к началу процесса реверса. Этот процесс состоит из двух этапов: торможения противовключением и разбега в противоположную сторону.
В случае необходимости только торможения двигателя при достижении им нулевой частоты вращения должна быть вновь нажата кнопка SВЗ, что приведет к отключению двигателя от сети и возвращению схемы в исходное положение. Если кнопка SВЗ нажата не будет, то это приведет к разбегу двигателя в другую сторону, т.е. к его реверсу.
Во избежание короткого замыкания в цепи статора, которое может возникнуть в результате одновременного ошибочного нажатия кнопок SВ1 и SВ2, в реверсивных магнитных пускателях иногда предусматривается специальная механическая блокировка. Она представляет собой рычажную систему, которая предотвращает втягивание одного контактора, если включен другой. В дополнение к механической блокировке в схеме используется типовая электрическая блокировка, применяемая в реверсивных схемах управления. Она предусматривает перекрестное включение размыкающих контактов аппарата КМ1 в цепь катушки аппарата КМ2 и, наоборот.
Следует отметить, что повышению надежности и удобства в эксплуатации способствует использование в схеме воздушного автоматического выключателя QF. Его наличие исключает возможность работы привода при обрыве одной фазы, при однофазном коротком замыкании.
Схема управления многоскоростным АД.
Эта схема (рис. 2.3) обеспечивает получение двух скоростей двигателя путем соединения секций (полуобмоток) обмотки статора в треугольник или двойную звезду, а также его реверсирование. Защита электропривода осуществляется тепловыми реле КК1 и КК2 и предохранителями FА.
Рис. 2.3. Схема управления двухскоростным АД
Для пуска двигателя на низкую частоту вращения нажимается кнопка SВ4, после чего срабатывает контактор КМ2 и блокировочное реле КV. Статор двигателя оказывается включенным по схеме треугольника, а реле КV, замкнув свои контакты в цепях катушек аппаратов КМЗ и КМ4, подготавливает подключение двигателя к источнику питания. Далее нажатие кнопки SВ1 или SВ2 приводит к включению соответственно в направлении «Вперед» или «Назад».
После разбега двигателя до низкой частоты вращения может быть осуществлен его разгон до высокой частоты вращения. Для этого нажимается кнопка SВ5, что приведет к отключению контактора КМ2 и включению контактора КМ1, обеспечивающему переключение секций обмоток статора с треугольника на двойную звезду.
Остановка двигателя производится нажатием кнопки SВ3, что вызовет отключение всех контакторов от сети и торможение двигателя выбегом.
Применение в схеме двухцепных кнопок управления не допускает одновременного включения контакторов КМ1 и КМ2, КМ3 и КМ4. Этой же цели служит перекрестное включение размыкающих блок-контактов контакторов КМ1 и КМ2, КМ3 и КМ4 в цепи их катушек.
Схема управления АД, обеспечивающая прямой пуск и динамическое торможение в функции времени
Пуск двигателя осуществляется нажатием кнопки SВ1 (рис. 2.4), после чего срабатывает линейный контактор КМ, подключающий двигатель к источнику питания. Одновременно с этим замыкание контакта КМ в цепи реле времени КТ вызовет его срабатывание и замыкание его контакта в цепи контактора торможения КМ1. Однако последний не срабатывает, так как перед этим разомкнулся в этой цепи размыкающий контакт КМ.
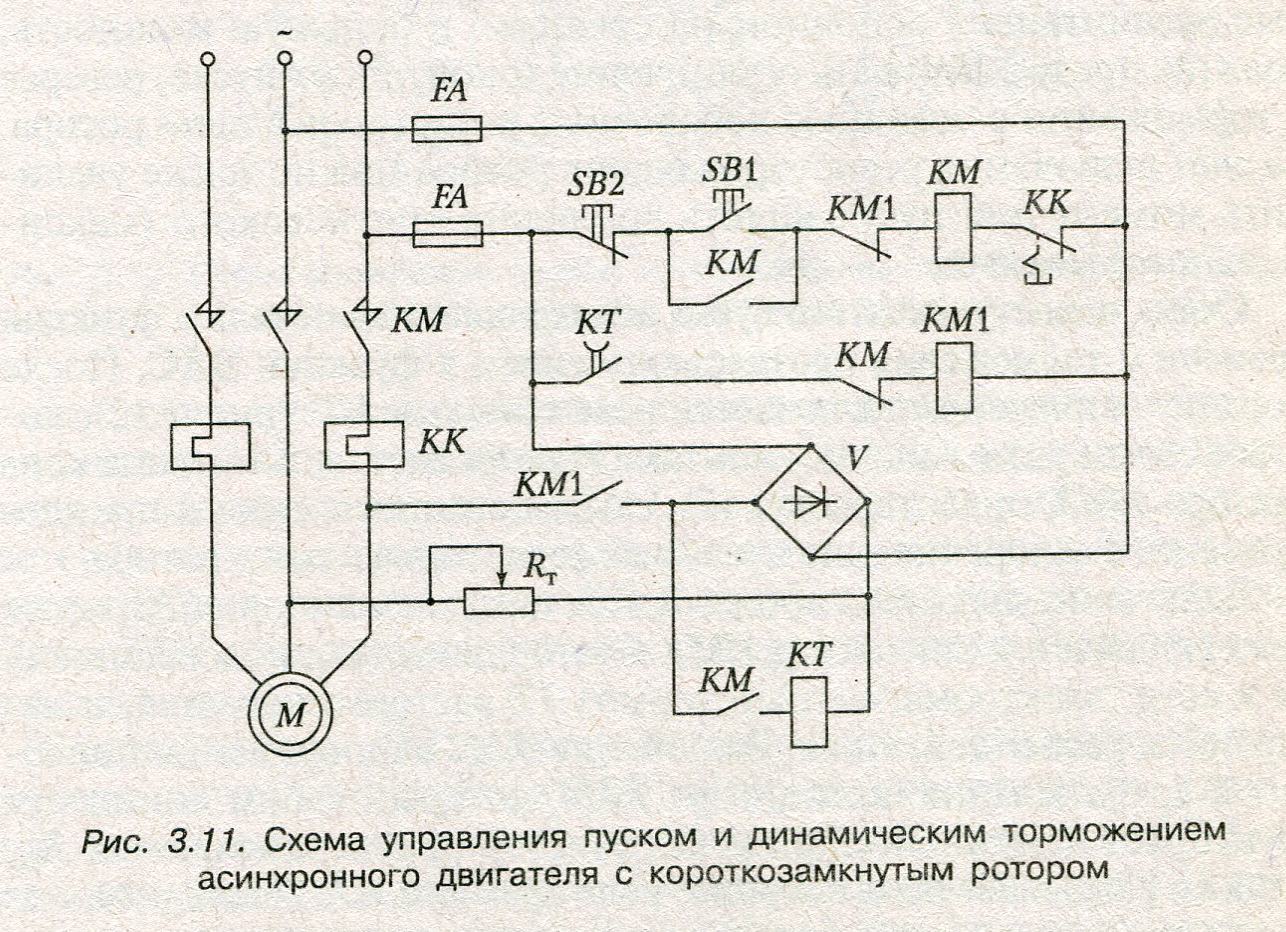
Рис. 2.4. Схема управления пуском и динамическим торможением АД с короткозамкнутым ротором
Для остановки двигателя нажимается кнопка SВ2, Контактор КМ отключается, размыкая свои контакты в цепи статора двигателя и отключая тем самым его от сети переменного тока. Одновременно с этим замыкается контакт КМ в цепи аппарата КМ1 и размыкается контакт КМ в цепи реле КТ. Это приводит к включению контактора торможения КМ1, подаче в обмотки статора постоянного тока от выпрямителя V через резистор Rт и переводу двигателя в режим динамического торможения.
Реле времени КТ, потеряв питание, начинает отсчет выдержки времени. Через интервал времени, соответствующий времени останова двигателя, реле КТ размыкает свой контакт в цепи контактора КМ1, тот отключается, прекращая подачу постоянного тока в цепь статора. Схема возвращается в исходное положение.
Интенсивность динамического торможения регулируется резистором Rт, с помощью которого устанавливается необходимый постоянный ток в статоре двигателя.
Для исключения возможности одновременного подключения статора к источникам переменного и постоянного тока в схеме использована типовая блокировка с помощью размыкающих контактов КМ и КМ1, включенных перекрестно в цепи катушек этих аппаратов.
Типовые схемы управления АДс фазным ротором. Схемы управления двигателя с фазным ротором, которые рассчитаны в основном на среднюю и большую мощность, должны предусматривать ограничение токов при их пуске, реверсе и торможении с помощью добавочных резисторов в цепи ротора. За счет включения резисторов в цепь ротора можно также увеличить момент при пуске вплоть до уровня критического (максимального) момента.
Схема одноступенчатого пуска АД в функции времени и торможения противовключением в функции ЭДС
После подачи напряжения включается реле времени КТ (рис. 2.5), которое своим размыкающим контактом разрывает цепь питания контактора КМ3, предотвращая тем самым его включение и преждевременное закорачивание пусковых резисторов в цепи ротора.

Рис.2.5. Схема управления пуском и торможением противовключением АД с фазным ротором
Включение двигателя производится нажатием кнопки SВ1, после чего включается контактор КМ1. Статор двигателя подсоединяется к сети, электромагнитный тормоз YВ растормаживается, и начинается разбег двигателя. Включение КМ1 одновременно приводит к срабатыванию контактора КМ4, который своим контактом шунтирует ненужный при пуске резистор противовключения Rд2, а также разрывает цепь катушки реле времени КТ. Последнее, потеряв питание, начинает отсчет выдержки времени, после чего замыкает свой контакт в цепи катушки контактора КМ3, который срабатывает и шунтирует пусковой резистор Rд1, в цепи ротора, и двигатель выходит на свою естественную характеристику.
Управление торможением обеспечивает реле торможения KV, контролирующее уровень ЭДС (частоты вращения) ротора. С помощью резистора Rp, оно отрегулировано таким образом, что при пуске, когда скольжение двигателя 0 < s < 1, наводимая в роторе ЭДС будет недостаточна для включения, а в режиме противовключения, когда 1 < s < 2, уровень ЭДС достаточен для его включения.
Для осуществления торможения двигателя нажимается сдвоенная кнопка SВ2, размыкающий контакт которой разрывает цепь питания катушки контактора КМ1. После этого двигатель отключается от сети и разрывается цепь питания контактора КМ4 и замыкается цепь питания реле КТ. В результате этого контакторы КМ3 и КМ4 отключаются и в цепь ротора двигателя вводится сопротивление Rд1 + Rд2.
Нажатие кнопки SВ2 приводит одновременно к замыканию цепи питания катушки контактора КМ2, который, включившись, вновь подключает двигатель к сети, но уже с другим чередованием фаз сетевого напряжения на статоре. Двигатель переходит в режим торможения противовключением. Реле КV срабатывает и после отпускания, кнопки SВ2 будет обеспечивать питание контактора КМ2 через свой контакт и замыкающий контакт этого аппарата.
В конце торможения, когда частота вращения будет близка к нулю и ЭДС ротора уменьшится, реле КV отключится и своим размыкающим контактом разомкнет цепь катушки контактора КМ2. Последний, потеряв питание, отключит двигатель от сети, и схема придет в исходное состояние. После отключения КМ2 тормоз YВ, потеряв питание, обеспечит фиксацию (торможение) вала двигателя.
Схема одноступенчатого пуска АД в функции тока и динамического торможения в функции частоты вращения
Схема (рис. 2.6) включает в себя контакторы КМ1, КМ2 и КМ3; реле тока КА; реле контроля частоты вращения SR, промежуточное реле KV; понижающий трансформатор для динамического торможения Т; выпрямитель VD. Максимальная токовая защита осуществляется предохранителями FA1 и FA2, защита от перегрузки двигателя – тепловыми реле КК1 и КК2.
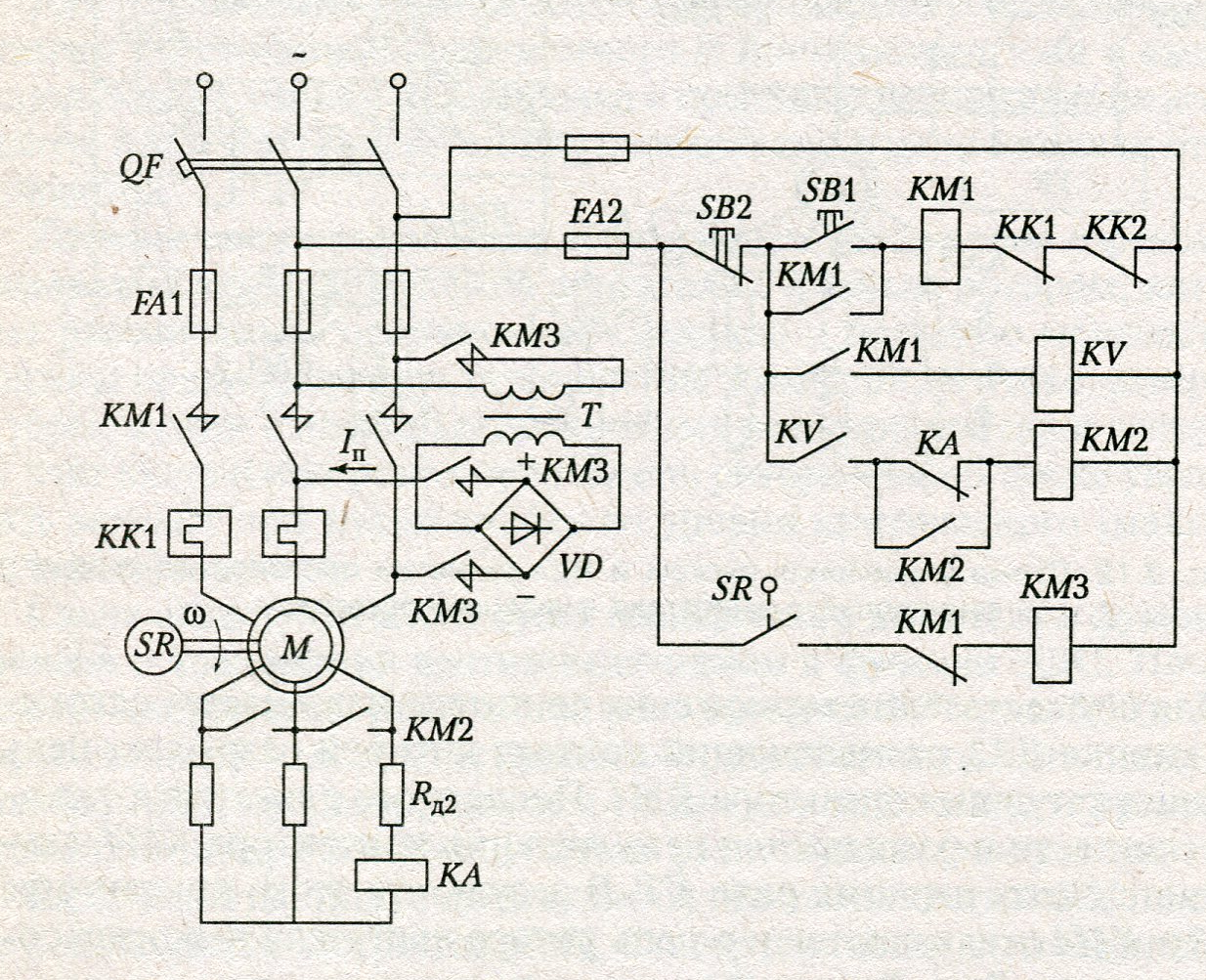
Рис. 2.6. Схема управления пуском и динамическим торможением АД с фазным ротором
Схема работает следующим образом. После подачи с помощью автоматического выключателя QFнапряжения для пуска двигателя нажимается кнопка SВ1, включается контактор КМ1, силовыми контактами которого статор двигателя подключается к сети. Бросок тока в цепи ротора вызовет включение реле тока КА и размыкание цепи контактора ускорения КМ2. Тем самым разбег двигателя начнется с пусковым резистором Rд2 в цепи ротора.
Включение контактора КМ1 приводит также к шунтированию кнопки SВ1, размыканию цепи катушки контактора торможения КМ3 и включению промежуточного реле напряжения КV, что, тем не менее, не приведет к включению контактора КМ2, так как до этого в этой цепи разомкнулся контакт реле КА.
По мере увеличения частоты вращения двигателя уменьшаются ЭДС и ток в роторе. При некотором значении тока в роторе, равном току отпускания реле КА, оно отключится и своим размыкающим контактом замкнет цепь питания контактора КМ2. Тот включится, зашунтирует пусковой резистор Rд2, и двигатель выйдет на свою естественную характеристику.
Следует отметить, что вращение двигателя вызовет замыкание контакта реле частоты вращения SR в цепи контактора КМ3, однако он не сработает, так как до этого разомкнулся контакт контактора КМ1.
Для перевода двигателя в тормозной режим нажимается кнопка SВ2. Контактор КМ1 теряет питание и отключает АД от сети переменного тока. Благодаря замыканию контактов КМ1 включится контактор торможения КМ3, контакты которого замкнут цепь питания обмотки статора от выпрямителя VD), подключенного к трансформатору Т, и тем самым двигатель переводится в режим динамического торможения. Одновременно с этим потеряют питание аппараты КV и КМ2, что приведет к вводу в цепь ротора резистора Rд2. Двигатель начинает тормозиться.
При частоте вращения двигателя, близкой к нулю, реле контроля частоты вращения SR разомкнет свой контакт в цепи катушки контактора КМ3. Он отключится и прекратит торможение двигателя. Схема придет в исходное положение и будет готова к последующей работе.
Принцип действия схемы не изменится, если катушку реле тока КА включить в фазу статора, а не ротора.
Что такое электрический тяговый привод? Определение, услуги, особенности и рабочий цикл
Определение: Привод, который использует электроэнергию для движения вперед, такой тип привода называется тяговым электрическим приводом. Одно из основных применений электропривода — это транспортировка людей и материалов из одного места в другое. Тяговые приводы в основном подразделяются на два типа: однофазный тяговый привод переменного тока и тяговый привод постоянного тока.
Электротяга
Услуги электрической тяги в целом можно отнести к
- Электропоезда
- Магистральные поезда
- Пригородные поезда
- Электробусы, трамваи и троллейбусы.
- Транспортные средства на аккумуляторах и солнечных батареях
Услуги по электротяге подробно описаны ниже.
1. Электропоезда
Электропоезд, курсирующий по фиксированным рельсам, далее классифицируется как магистральный и пригородный поезд.
Магистральные поезда — В поездах такого типа питание двигателя осуществляется двумя способами: либо от воздушной линии в электровозе, либо через дизель-генераторную установку в тепловозе.
В электровозе приводной двигатель размещен в локомотиве. Воздушная линия электропередачи прокладывается вдоль рельса или над ним. Токосъемник прикреплен к локомотиву и имеет полоску, которая скользит по питающему проводу. Таким образом, поддерживайте контакт между питанием и локомотивом. Питающий провод обычно известен как контактный провод. Для обеспечения хорошего контакта между токосъемником и питающим проводом используются контактный кабель и подводящие провода.
![]()
В высокоскоростном поезде используется коллектор пантографа. Коллектор имеет форму пятиугольника и поэтому называется пантографным коллектором. Коллектор имеет токопроводящую полосу, которая прижимается пружинами к контактному проводу. Коллекторная полоса обычно изготавливается из стали и поддерживает постоянное давление между полосой коллектора и контактным проводом для предотвращения вертикальных колебаний.
Однофазное питание проложено по всей трассе, а ток через коллектор попадает в локомотив.Мощность поступает через первичную обмотку понижающего трансформатора и возвращается на землю через колеса локомотива. Вторичная обмотка силового трансформатора питает силовой модулятор, который, в свою очередь, приводит в действие приводной двигатель. Вторичная обмотка трансформатора также питает вентилятор молнии, кондиционер и т. Д.
Пригородные поезда — Пригородные поезда используются для передвижения на небольшие расстояния. Этот поезд еще называют пригородным, пригородный поезд имеет последовательные остановки на гораздо меньшем расстоянии.Этот поезд состоит из моторных вагонов для увеличения соотношения веса на ведущих колесах и общей массы поезда, за счет чего увеличивается ускорение и замедление поезда.
Каждый вагон оборудован электроприводом и пантографным коллектором. Обычная схема использования силовых и немоторизованных тренеров — соотношение 1: 2. Для поездов большой мощности это соотношение может быть увеличено с 1: 1. Поезд, в котором используются автобусы с электроприводом и прицепами, также известен как поезд с электроприводом.Электроснабжение пригородного поезда такое же, как и в главном поезде, за исключением метро.
В поезде метро используется источник постоянного тока, поскольку для системы питания постоянного тока требуется меньший зазор от питающего проводника корпуса поезда. Кроме того, модулятор мощности становится проще и дешевле. Поезда метрополитена не используют воздушную линию электропередачи, и, следовательно, энергия подается по ходовым рельсам или с одной стороны туннеля.
2. Электробусы, трамваи и троллейбусы
Такой тип привода обычно представляет собой однодвигательный автобус.Он получает питание от воздушной линии низкого напряжения постоянного тока, которая проходит вдоль дороги. Поскольку ток, как правило, небольшой, коллектор состоит из стержня, на конце которого находится колесо с канавками или два стержня, соединенных контактной дугой. Система коллектора обладает достаточной гибкостью, а также обеспечивает дополнительный проводник для возврата тока. .
Трамваи — это электрические автобусы, которые ходят по рельсам и состоят из одного автобуса. Иногда добавляются два или более немоторизованных или прицепных вагона.Их нынешняя система сбора аналогична автобусам, и ее возврат может осуществляться через одну из рельсов. Трамваи ходят по рельсам, и их путь по дороге фиксированный.
Электрические тележки используются для транспортировки материалов на шахтах и фабриках. Ездят в основном по рельсам. Они похожи на трамваи; только форма другая.
Важные характеристики тяговых электроприводов
Ниже описаны важные особенности тяговых электрических приводов.
- Тяговому приводу требовался большой крутящий момент при трогании с места и ускорении для разгона тяжелой массы.
- По экономическим причинам в тяге переменного тока используется однофазное питание.
- Питание резкое вольта
Что такое система электрического привода? Определение и объяснение
Определение: Система электрического привода определяется как система, которая используется для управления скоростью, крутящим моментом и направлением электродвигателя. Каждая система электропривода отличается от других систем электропривода, но у всех систем электропривода есть некоторые общие черты.
Системы электропривода
На рисунке ниже представлена типичная схема распределительной сети на уровне предприятия.Эта система электропривода получает входящее питание переменного тока от центра управления двигателями (MCC). MCC управляет питанием нескольких приводов, расположенных в определенной области.
На большом производственном предприятии существует множество таких MCC, и они получают питание от главного распределительного центра, называемого центром управления питанием (PCC). MCC и PCC обычно используют воздушный выключатель в качестве элемента переключения мощности. Номинальные характеристики этих переключающих элементов составляют до 800 В и 6400 А.
Тепловые реле перегрузки защищают систему электропривода от перегрузки.Защита от короткого замыкания обеспечивается магнитным датчиком выключателя. Предохранители с высокой отключающей способностью используются для резервной защиты, а также для обеспечения защиты от короткого замыкания, происходящего в секции шин перед автоматическим выключателем.
Рассмотрен на примере двух приводных систем. В одном используется двигатель постоянного тока, управляемый преобразователем, а в другом — двигатель переменного тока с питанием от инвертора. Система привода двигателя постоянного тока, управляемая преобразователем, показана на рисунке ниже.
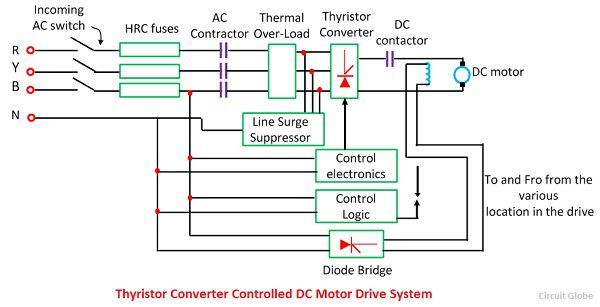
Асинхронный привод с инверторным управлением GTO показан на рисунке ниже:

Ниже приведены основные части этих приводных систем:
- Выключатель входящего переменного тока.
- Блок преобразователя мощности и инвертора.
- Распределительное устройство исходящего постоянного и переменного тока
- Логика управления
- Двигатель и соответствующая нагрузка.
Основные части системы электроснабжения описаны ниже.
1 . Распределительное устройство входящего переменного тока: Оно состоит из блока предохранителей переключателя и подрядчика по питанию переменного тока, которые имеют диапазоны до 660 В, 800 А. Коммутационное устройство заменяет обычного подрядчика подрядчиком, установленным на шину, а также использует воздушный выключатель в качестве входного выключателя.Подрядчик, установленный на планке, увеличивает диапазон до 1000 В, 1200 А.
Используется предохранитель HRC с номиналом до 660 В, 800 А. Распределительное устройство переменного тока имеет тепловую перегрузку для защиты системы от перегрузки. Иногда подрядчика КРУЭ заменяют автоматическим выключателем в литом корпусе.
2. Блок преобразователя мощности / или инвертора — Этот блок состоит из двух основных блоков — силовой и управляющей электроники. Блоки силовой электроники состоят из полупроводниковых приборов, радиаторов, полупроводниковых предохранителей, ограничителей перенапряжения, охлаждающих вентиляторов.Управляющая электроника состоит из цепи запуска, собственного регулируемого источника питания и привода, а также цепи изоляции. Цепь привода и изоляции контролирует и регулирует поток мощности к двигателю.
Когда привод работает в замкнутом контуре, он будет иметь контроллер и контуры обратной связи по току и скорости. Система управления имеет изоляцию трех портов, то есть источника питания, входов и выходов, которые изолированы с соответствующими уровнями изоляции.
3. Ограничители перенапряжения в линии — Защищают полупроводниковый преобразователь от скачков напряжения, возникающих в линии из-за включения и выключения нагрузки, подключенной к той же линии.Ограничитель перенапряжения в линии вместе с индуктивностью подавляет скачки напряжения.
Ограничитель перенапряжения в линии поглощает определенное количество захваченной энергии при срабатывании входящего автоматического выключателя и прерывает ток, подаваемый на ловушку. Ограничитель перенапряжения в линии не потребуется, если модулятор мощности не является полупроводником.
4. Логика управления — Используется для блокировки и упорядочивания различных операций приводной системы в нормальных, аварийных и аварийных состояниях.Блокировка защищает систему от ненормальных и небезопасных операций. Последовательность защищает различные операции привода, такие как пуск, торможение, реверс, толчковый режим и т. Д., Которые выполняются в заранее запланированной последовательности. Для сложных операций блокировки и последовательности используется программируемый логический контроллер.
.Что такое привод переменного тока? Работа и типы электрических приводов и VFD
Что такое электрические приводы переменного тока? Классификация приводов переменного тока и частотно-регулируемых приводов
Электрические приводы являются неотъемлемой частью промышленных процессов и процессов автоматизации, особенно там, где точный контроль скорости двигателя является основным требованием. Кроме того, все современные электропоезда или локомотивы приводились в действие электрическими приводами. Робототехника — еще одна важная область, в которой приводы с регулируемой скоростью обеспечивают точное управление скоростью и положением.
Что такое привод постоянного тока? Работа и типы приводов постоянного тока
Даже в нашей повседневной жизни мы можем найти так много приложений, в которых приводы с регулируемой скоростью (или приводы с регулируемой скоростью) используются для выполнения широкого спектра функций, включая управление электробритвами, компьютерное периферийное управление, автоматическая работа стиральных машин и так далее. 
Что такое электропривод?
Привод управляет скоростью, крутящим моментом и направлением движущихся объектов.Приводы обычно используются для приложений управления скоростью или движением, таких как станки, транспорт, роботы, вентиляторы и т. Д. Приводы, используемые для управления электродвигателями, известны как электрические приводы .
Приводы могут быть постоянного или переменного типа. Приводы с постоянной скоростью неэффективны для операций с переменной скоростью; в таких случаях приводы с регулируемой скоростью используются для управления нагрузками в любом из широкого диапазона скоростей. 
Зачем нужны электрические приводы?
Приводы с регулируемой скоростью необходимы для точного и непрерывного управления скоростью, положением или крутящим моментом различных нагрузок.Наряду с этой важной функцией есть много причин использовать приводы с регулируемой скоростью. Некоторые из них включают
- Для достижения высокой эффективности: электрические приводы позволяют использовать широкий диапазон мощности, от милливатт до мегаватт для различных скоростей, и, следовательно, общие затраты на эксплуатацию системы снижаются.
- Для увеличения скорости точности остановки или реверсирование двигателя
- Для управления пусковым током
- Для обеспечения защиты
- Для установки расширенного управления с изменением таких параметров, как температура, давление, уровень и т. д.
Развитие силовых электронных устройств, микропроцессоров и цифровой электроники привело к разработке современных электроприводов, которые более компактны, эффективны, дешевле и имеют более высокие характеристики, чем громоздкие, негибкие и дорогие традиционные электрические приводные системы, в которых используется система из нескольких машин. для производства переменной скорости.
Блок-схема электропривода переменного тока
Компоненты современной системы электропривода показаны на рисунке ниже.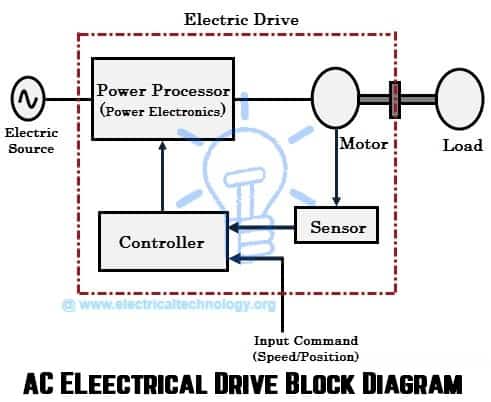 На приведенной выше блок-схеме системы электропривода, электродвигатель, силовой процессор (силовой электронный преобразователь), контроллер, датчики (например, ПИД-регулятор) и фактическая нагрузка или устройство показаны как основные компоненты, включенные в привод.
На приведенной выше блок-схеме системы электропривода, электродвигатель, силовой процессор (силовой электронный преобразователь), контроллер, датчики (например, ПИД-регулятор) и фактическая нагрузка или устройство показаны как основные компоненты, включенные в привод.
Электродвигатель — это основной компонент электрического привода, который преобразует электрическую энергию (направляемую процессором мощности) в механическую энергию (приводящую в движение нагрузку). Двигатель может быть двигателем постоянного или переменного тока в зависимости от типа нагрузки.
Силовой процессор также называется силовым модулятором, который, по сути, является силовым электронным преобразователем и отвечает за управление потоком мощности к двигателю с целью достижения переменной скорости, реверса и торможения двигателя. Силовые электронные преобразователи включают преобразователи AC-AC, AC-DC, DC-AC и DC-DC.
Контроллер сообщает процессору питания, сколько мощности он должен генерировать, предоставляя ему опорный сигнал после рассмотрения входной команды и входных сигналов датчиков.Контроллер может быть микроконтроллером, микропроцессором или процессором DSP.
Привод переменной скорости, используемый для управления двигателями постоянного тока, известен как приводы постоянного тока , а приводы переменной скорости, используемые для управления двигателями переменного тока, называются приводами переменного тока . В этой статье мы поговорим о приводах переменного тока.
Классификация приводов переменного тока
Приводы переменного тока используются для привода двигателей переменного тока, особенно трехфазных асинхронных двигателей, потому что они преобладают над другими двигателями в большинстве отраслей промышленности.В промышленных терминах привод переменного тока также называют частотно-регулируемым приводом (VFD), приводом с регулируемой скоростью (VSD) или приводом с регулируемой скоростью (ASD).
Хотя существуют различные типы частотно-регулируемых приводов (или приводов переменного тока), все они работают по одному и тому же принципу, который преобразует фиксированное входное напряжение и частоту в переменное напряжение и частоту на выходе. Частота привода определяет, насколько быстро двигатель должен работать, в то время как комбинация напряжения и частоты определяет величину крутящего момента, который двигатель должен генерировать.
ЧРП состоит из силовых электронных преобразователей, фильтра, центрального блока управления (микропроцессора или микроконтроллера) и других датчиков. Блок-схема типичного ЧРП показана ниже.
Блок-схема привода переменного тока (типичный частотно-регулируемый привод)
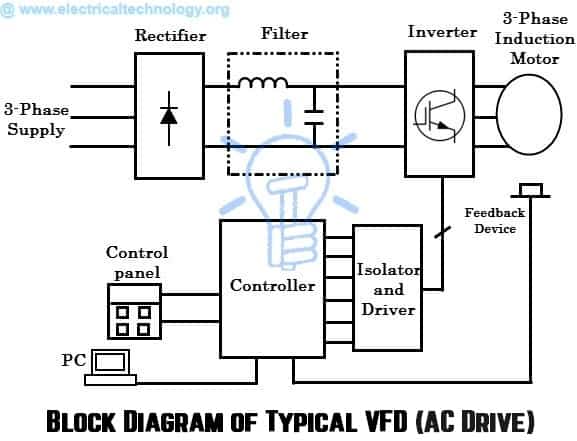
Конструкция и детали типового привода переменного тока с частотно-регулируемым приводом
Различные секции частотно-регулируемого привода (VFD) включают выпрямитель
а секция фильтра преобразует мощность переменного тока в мощность постоянного тока с незначительной пульсацией.В основном выпрямительная секция сделана из диодов, которые выдают неконтролируемый выход постоянного тока. Затем секция фильтра удаляет рябь и создает постоянный постоянный ток из пульсирующего постоянного тока. В зависимости от типа питания количество диодов определяется выпрямителем. Например, если это трехфазный источник питания, требуется минимум 6 диодов, и поэтому он называется шестиимпульсным преобразователем.
Инвертор получает питание постоянного тока от выпрямительной секции, а затем преобразует обратно в мощность переменного тока переменного напряжения и переменной частоты под управлением микропроцессора или микроконтроллера.Эта секция состоит из ряда транзисторов, IGBT, SCR или MOSFET, и они включаются / выключаются сигналами от контроллера. В зависимости от включения этих силовых электронных компонентов определяется мощность и, в конечном итоге, скорость двигателя.
Контроллер выполнен с микропроцессором или микроконтроллером и принимает входные данные от датчика (в качестве задания скорости) и задание скорости от пользователя и, соответственно, запускает силовые электронные компоненты для изменения частоты источника питания.Он также выполняет отключение при повышении и понижении напряжения, коррекцию коэффициента мощности, контроль температуры и подключение к ПК для мониторинга в реальном времени.
Принцип работы частотно-регулируемого привода (VFD)
Мы знаем, что скорость асинхронного двигателя пропорциональна частоте источника питания ( N = 120f / p ), и, изменяя частоту, мы может получить переменную скорость. Но когда частота уменьшается, крутящий момент увеличивается, и, следовательно, двигатель потребляет большой ток.Это, в свою очередь, увеличивает магнитный поток в двигателе. Также магнитное поле может достигать уровня насыщения, если не снижать напряжение питания.
Следовательно, и напряжение, и частота должны изменяться в постоянном соотношении, чтобы поддерживать поток в рабочем диапазоне. Поскольку крутящий момент пропорционален магнитному потоку, крутящий момент остается постоянным во всем рабочем диапазоне v / f. 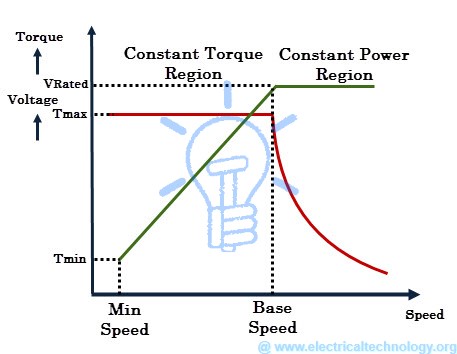 На приведенном выше рисунке показано изменение крутящего момента и скорости асинхронного двигателя для регулирования напряжения и частоты.На рисунке напряжение и частота изменяются с постоянным соотношением до базовой скорости. Таким образом, магнитный поток и, следовательно, крутящий момент остаются почти постоянными до базовой скорости. Эта область называется областью постоянного крутящего момента.
На приведенном выше рисунке показано изменение крутящего момента и скорости асинхронного двигателя для регулирования напряжения и частоты.На рисунке напряжение и частота изменяются с постоянным соотношением до базовой скорости. Таким образом, магнитный поток и, следовательно, крутящий момент остаются почти постоянными до базовой скорости. Эта область называется областью постоянного крутящего момента.
Так как напряжение питания может быть изменено только до номинального значения и, следовательно, скорость при номинальном напряжении является базовой скоростью. Если частота увеличивается сверх базовой скорости, магнитный поток в двигателе уменьшается, и, таким образом, крутящий момент начинает падать. Это называется областью ослабления потока или постоянной мощности.
Этот тип управления называется методом постоянного напряжения / частоты и используется в частотно-регулируемых приводах (ЧРП) и является наиболее популярным типом управления в промышленности. Предположим, асинхронный двигатель подключен к источнику питания 460 В, 60 Гц, тогда соотношение будет 7,67 В / Гц (как 460/60 = 7,67). Пока это соотношение сохраняется пропорционально, двигатель развивает номинальный крутящий момент и регулируемую скорость.
Схемы управления частотно-регулируемым приводом
Существуют различные методы управления скоростью, реализованные для частотно-регулируемых приводов.Ниже приводится основная классификация методов управления, используемых в современных ЧРП.
- Скалярное управление
- Векторное управление
- Прямое управление крутящим моментом
Скалярное управление
В этом случае величины напряжения и частоты контролируются путем поддержания постоянного отношения v / f и, следовательно, называются скалярным управлением (скалярные значения определяет скорость и крутящий момент). На двигатель подаются сигналы переменного напряжения и частоты, генерируемые ШИМ-управлением от инвертора.
Инвертором можно управлять с помощью микроконтроллера, микропроцессора или любого другого цифрового контроллера в зависимости от типа производителя. Эта схема управления широко используется, поскольку для управления скоростью требуется небольшое знание двигателя. Скалярное управление может быть реализовано несколькими способами, и некоторые из популярных схем включают
Синусоидальный ШИМ
В этом методе частота переключателя изменяется в зависимости от входного задания скорости и среднего или среднеквадратичного значения напряжение для этой частоты определяется количеством импульсов и шириной импульсов.Если ширина импульса изменяется, напряжение на двигателе также изменяется. Это напряжение создает через двигатель синусоидальный ток, который намного ближе к истинной синусоиде.
Для реализации этого метода требуются лишь небольшие вычисления. Однако этот метод имеет недостатки, заключающиеся в том, что он включает гармоники при скорости переключения ШИМ, а также величина основного напряжения менее 90%. 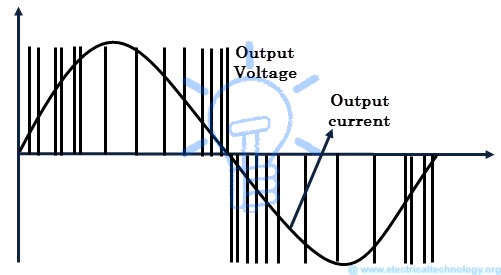 В этом методе синусоидальные взвешенные значения сохраняются в микроконтроллере или микропроцессоре и становятся доступными на выходном порту через определенные пользователем интервалы, которые затем подаются на инвертор для обеспечения переменного питания двигателя.
В этом методе синусоидальные взвешенные значения сохраняются в микроконтроллере или микропроцессоре и становятся доступными на выходном порту через определенные пользователем интервалы, которые затем подаются на инвертор для обеспечения переменного питания двигателя.
Шестиступенчатый ШИМ
В этом методе инвертор VFD имеет шесть различных состояний переключения, и они переключаются в определенном порядке, чтобы обеспечить переменное напряжение и частоту для двигателя. Изменение направления вращения двигателя легко достигается путем изменения последовательности фаз на выходе инвертора с помощью угла включения.
Этот метод можно легко реализовать, так как не требуется промежуточных вычислений, а также величина основного напряжения больше, чем у шины постоянного тока.Однако в этом методе высоки гармоники низкого порядка, которые не могут быть отфильтрованы индуктивностью двигателя, и, следовательно, это приводит к большим потерям, рывкам и пульсации крутящего момента.
ШИМ с пространственной векторной модуляцией (SVPWM)
В этом методе три вектора фазного напряжения асинхронного двигателя преобразуются в один вращающийся вектор. Инвертор VFD может быть переведен в восемь уникальных состояний. Напряжение ШИМ на нагрузку достигается путем правильного выбора состояний переключателя инвертора и расчета соответствующего периода времени для каждого состояния.
При использовании преобразования пространственного вектора для каждого состояния генерируются три фазовых синусоидальных волны, которые затем применяются к двигателю.
Основным преимуществом этого метода является то, что величина гармоники меньше на частоте переключения ШИМ. Однако для использования этого метода требуются дополнительные вычисления.
Векторное управление
Этот метод также называется управлением, ориентированным на поток, управлением, ориентированным на поле, или косвенным управлением крутящим моментом. При этом три вектора фазного тока преобразуются в двумерную вращающуюся систему отсчета (d-q) из трехмерной системы отсчета с использованием преобразования Кларка-Парка.Компонент «d» — это составляющая, создающая магнитный поток, в токе статора, а составляющая «q» — составляющая, создающая крутящий момент. 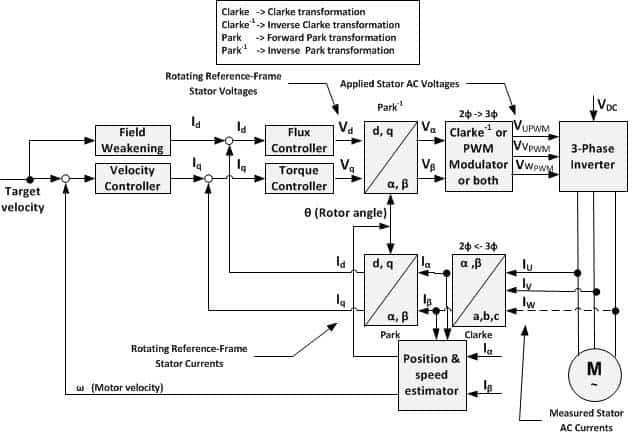 Эти два компонента управляются независимо через отдельный ПИ-регулятор, а затем выходы ПИ-регуляторов преобразуются обратно в трехмерную стационарную базовую плоскость с использованием обратного преобразования Кларка-Парка.
Эти два компонента управляются независимо через отдельный ПИ-регулятор, а затем выходы ПИ-регуляторов преобразуются обратно в трехмерную стационарную базовую плоскость с использованием обратного преобразования Кларка-Парка.
Используя метод пространственно-векторной модуляции, соответствующее переключение является широтно-импульсной модуляцией. Различные типы методов векторного управления включают управление, ориентированное на поток статора, управление, ориентированное на поток ротора, и управление, ориентированное на поток намагничивания.
Векторное управление дает лучший отклик крутящего момента и точное управление скоростью по сравнению со скалярным управлением. Но для этого требуется сложный алгоритм расчета скорости, и он дороже по сравнению со скалярным управлением из-за устройств обратной связи.
Прямое управление крутящим моментом
Этот метод не имеет фиксированной схемы переключения по сравнению с традиционным векторным управлением. Он переключает инвертор в соответствии с потребностями нагрузки. Этот метод обеспечивает высокий отклик, особенно при изменении нагрузки из-за отсутствия фиксированной схемы переключения.Это исключает использование какой-либо обратной связи, хотя обеспечивает точность скорости до 0,5%. В этом методе используется адаптивная моторная модель, которая основана на математических выражениях базовой моторной теории.  Для этой модели требуются основные параметры двигателя, такие как сопротивление статора, коэффициент насыщения, взаимная индуктивность и т. Д., И алгоритм фиксирует эти данные без вращения двигателя. Эта модель вычисляет фактический крутящий момент и магнитный поток двигателя, учитывая такие входные данные, как напряжение шины постоянного тока, положение переключателя тока и линейные токи.Затем эти значения передаются на два компаратора уровня крутящего момента и магнитного потока.
Для этой модели требуются основные параметры двигателя, такие как сопротивление статора, коэффициент насыщения, взаимная индуктивность и т. Д., И алгоритм фиксирует эти данные без вращения двигателя. Эта модель вычисляет фактический крутящий момент и магнитный поток двигателя, учитывая такие входные данные, как напряжение шины постоянного тока, положение переключателя тока и линейные токи.Затем эти значения передаются на два компаратора уровня крутящего момента и магнитного потока.
Выходными данными компараторов являются опорные сигналы крутящего момента и магнитного потока, которые передаются в таблицу выбора переключателя, в которой выбранное положение переключателя применяется к инвертору без какой-либо модуляции. Отсюда и название «прямое управление крутящим моментом», поскольку крутящий момент и магнитный поток двигателя становятся напрямую управляемыми переменными.
Приводы переменного тока в реальном времени: краткий обзор
Несколько расширенных функций приводов переменного тока или (VFD) делают их экономичным выбором для приложений с регулируемой скоростью.Такие функции, как дизайн корпуса, аналоговые входы / выходы, цифровые входы / выходы, многофункциональные клавиатуры и технология IGBT, позволяют легко настроить VFD для любого приложения.
В настоящее время большинство конструкций приводов переменного тока более компактны из-за использования микропроцессоров, IGBT, а также использования технологии поверхностного монтажа (например, резисторов SMD) для сборки компонентов. Эти блоки могут быть настенными или отдельно стоящими приводами. Существуют различные приводы от разных производителей, включая ABB, AB, Siemens, Delta и так далее.Ниже показаны различные пакеты приводов переменного тока ABB. 
По сути, настройка привода переменного тока для приложения включает три основных этапа, а именно: управляющую проводку, силовую проводку и программирование программного обеспечения. После подключения силовой и управляющей проводки мы должны настроить параметры привода переменного тока в соответствии с требованиями приложения с помощью программного обеспечения, съемной клавиатуры или удаленной панели оператора.
Нет необходимости переподключать привод, если приложение было изменено.Настройка для новых приложений выполняется просто путем изменения функций привода в программе. Приводы переменного тока
имеют аналоговые входы (например, задание скорости), аналоговые выходы (для вспомогательного измерения), цифровые входы (например, пуск, останов, реверс и т. Д.) И релейные выходы (реле скорости, реле неисправности и т. Д.) в секции проводки управления. Этот раздел контролируется специальным программным обеспечением, которое называется состоянием ввода-вывода, которое отслеживает и отображает входы и выходы привода. 
В обычных приводах панели программирования или сенсорные клавиатуры прикреплены к самому приводу.Современные приводы состоят из съемных панелей программирования, которые позволяют пользователю программировать, перемещаться по различным функциям и настраивать привод в соответствии с требованиями приложения.
Помимо ручных инструментов, каждый привод переменного тока поставляется со специальным программным обеспечением, которое упрощает запуск и обслуживание. Этот инструмент состоит из мастеров настройки для настройки параметров. Программный инструмент позволяет просматривать, редактировать, сохранять и загружать параметры в привод. Он также обеспечивает графический и числовой мониторинг сигналов.
При проектировании производители устанавливают для параметров привода переменного тока значения по умолчанию. Таким образом, оператору необходимо загрузить значения данных двигателя и значения, чтобы настроить привод для приложения. В дополнение к значениям по умолчанию производители также предоставляют макросы, которые представляют собой не что иное, как заранее запрограммированный набор значений.
Пользователь или оператор могут установить и настроить все параметры, включенные в макросы, за несколько секунд, вместо того, чтобы настраивать все параметры по отдельности, что может занять несколько минут.Эти макросы включают трехпроводное управление, ручной автоматический режим, ПИД-регулирование и регулирование крутящего момента.
Макрос управления пропорционально-интегрально-производной (ПИД) позволяет приводу автоматически управлять скоростью, получая управляющие входные данные, такие как давление, температура или уровень в резервуаре. При правильном программировании параметров аналогового и цифрового ввода / вывода с помощью макроса ПИД-регулирования достигается работа привода с обратной связью.
Приводы переменного токаимеют подключаемую опцию управления полевой шиной для подключения к основным автоматизированным системам, таким как ПЛК, ПК, PAC, системы SCADA и т. Д.Они могут поддерживать широкий спектр систем полевых шин связи, включая DeviceNet, PROFIBUS DP, ControlNet, MODBUS, PROFINET, Ethernet / IP и т. Д.
.Динамика электрических приводов — Формула и объяснение
Когда двигатель вращается, нагрузка системы может вращаться или может совершать поступательное движение. При поступательном движении положение тела меняется от точки к точке в пространстве. Скорость нагрузки может отличаться от скорости двигателя.
Если груз состоит из разных частей, их скорость может быть разной. Некоторые части ротора могут вращаться, в то время как другие могут совершать поступательное движение. Система эквивалентной нагрузки двигателя показана на рисунке ниже.
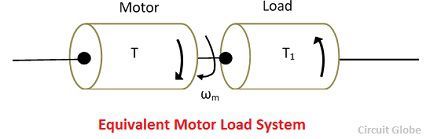 Где J — полярный момент инерции мотор-нагрузочной системы, относящийся к валу двигателя, кг-м 2
Где J — полярный момент инерции мотор-нагрузочной системы, относящийся к валу двигателя, кг-м 2
ω м — мгновенная угловая скорость вала двигателя, рад / с.
Тл — мгновенное значение развиваемого момента двигателя, Н-м.
T 1 — мгновенное значение момента нагрузки на валу двигателя, Н-м.
Уравнение, показанное ниже, описывает уравнение нагрузки двигателя. Это уравнение применимо для приводов с переменной инерцией, таких как шахта, намоточные машины, мотовило, приводы, промышленные роботы.В этом уравнении крутящий момент нагрузки включает трение и крутящий момент двигателя.
 Для привода с постоянным моментом инерции dj / dt = 0. Следовательно, уравнение принимает вид
Для привода с постоянным моментом инерции dj / dt = 0. Следовательно, уравнение принимает вид
 Приведенное выше уравнение показывает, что нагрузка, развиваемая двигателем, уравновешивается крутящим моментом T 1 и динамическим крутящим моментом jdω м т / dt. Составляющая крутящего момента j (dω м т / dt) называется динамическим крутящим моментом, потому что он присутствует только во время переходных процессов.
Приведенное выше уравнение показывает, что нагрузка, развиваемая двигателем, уравновешивается крутящим моментом T 1 и динамическим крутящим моментом jdω м т / dt. Составляющая крутящего момента j (dω м т / dt) называется динамическим крутящим моментом, потому что он присутствует только во время переходных процессов.
Ускорение или замедление привода в основном зависит от того, больше или меньше момент нагрузки, чем момент двигателя.Во время ускорения двигатель передает крутящий момент нагрузки вместе с дополнительной составляющей крутящего момента jdω m t / dt для преодоления инерции привода.
Приводы с большим моментом инерции должны увеличивать момент нагрузки на большую величину для получения достаточного ускорения. Привод, который требует быстрой переходной реакции, крутящий момент двигателя должен поддерживаться на чрезмерно высоком уровне, а система нагрузки двигателя должна быть спроектирована с меньшей возможной инерцией.
Энергия, связанная с динамическим крутящим моментом, сохраняется в виде кинетической энергии и определяется уравнением jdω 2 m / dt.Во время замедления динамический крутящий момент имеет отрицательный знак. Таким образом, он помогает двигателю развивать крутящий момент T и поддерживает движение привода, извлекая энергию из накопленной кинетической энергии.
.