Что такое ШИМ-регулятор оборотов двигателя. Как работает широтно-импульсная модуляция. Какие схемы ШИМ-регуляторов бывают. Где применяются ШИМ-регуляторы оборотов. Как собрать простой ШИМ-регулятор своими руками.
Что такое ШИМ-регулятор оборотов двигателя
ШИМ-регулятор оборотов двигателя — это электронное устройство, позволяющее плавно регулировать скорость вращения электродвигателя постоянного тока путем изменения среднего значения напряжения на его обмотках. Принцип работы основан на широтно-импульсной модуляции (ШИМ) напряжения питания.
Основные преимущества ШИМ-регуляторов оборотов:
- Высокий КПД (до 95-98%) за счет ключевого режима работы
- Плавная и точная регулировка скорости во всем диапазоне
- Сохранение высокого крутящего момента на малых оборотах
- Простота схемотехники и низкая стоимость
- Малые габариты и вес
Принцип работы ШИМ-регулятора оборотов
Принцип работы ШИМ-регулятора основан на быстром включении и выключении напряжения питания двигателя. Ключевой элемент (обычно транзистор) периодически подключает и отключает двигатель от источника питания с высокой частотой (обычно от 1 до 20 кГц).

Изменяя соотношение длительности включенного и выключенного состояний (скважность импульсов), можно регулировать среднее значение напряжения на двигателе, а значит и его обороты. Чем больше длительность включенного состояния относительно периода, тем выше среднее напряжение и обороты двигателя.
Основные схемы ШИМ-регуляторов оборотов
Существует несколько базовых схем построения ШИМ-регуляторов оборотов двигателя:
1. На основе ШИМ-контроллера
Наиболее распространенная схема. В качестве задающего генератора используется специализированная микросхема ШИМ-контроллера (например, TL494, UC3842 и др.). Она формирует управляющие импульсы для силового ключа. Регулировка осуществляется изменением опорного напряжения.
2. На основе таймера NE555
Простая схема на популярном таймере NE555. Генерирует ШИМ-сигнал, частота и скважность которого задаются RC-цепочкой. Регулировка производится переменным резистором. Подходит для маломощных двигателей.3. На основе операционного усилителя
В качестве задающего генератора используется операционный усилитель, работающий как компаратор. Он сравнивает пилообразное напряжение с опорным и формирует ШИМ-сигнал. Позволяет получить широкий диапазон регулирования.
Области применения ШИМ-регуляторов оборотов
ШИМ-регуляторы оборотов двигателя нашли широкое применение в различных областях:
- Электроинструмент (дрели, шуруповерты, циркулярные пилы)
- Бытовая техника (вентиляторы, пылесосы, миксеры)
- Автомобильная электроника (вентиляторы охлаждения, стеклоочистители)
- Электротранспорт (электровелосипеды, электросамокаты)
- Робототехника (приводы манипуляторов, колесных платформ)
- Модели и игрушки с электродвигателями
- Промышленные электроприводы
Как собрать простой ШИМ-регулятор своими руками
Для самостоятельной сборки простого ШИМ-регулятора оборотов понадобится:
- Микросхема ШИМ-контроллера (например, TL494)
- Силовой MOSFET-транзистор
- Переменный резистор
- Несколько резисторов и конденсаторов
- Диод Шоттки
- Печатная плата
Порядок сборки:
- Начертить принципиальную схему регулятора
- Разработать топологию печатной платы
- Изготовить печатную плату методом ЛУТ или заказать готовую
- Припаять компоненты согласно схеме
- Установить силовой транзистор на радиатор
- Подключить питание и нагрузку (двигатель)
- Настроить частоту и диапазон регулирования
При правильной сборке ШИМ-регулятор позволит плавно изменять обороты двигателя в широком диапазоне.
Преимущества и недостатки ШИМ-регуляторов
ШИМ-регуляторы оборотов имеют ряд достоинств и недостатков по сравнению с другими способами регулирования скорости двигателей постоянного тока:
Преимущества:
- Высокий КПД (до 95-98%) за счет ключевого режима работы
- Плавная регулировка во всем диапазоне оборотов
- Сохранение высокого момента на малых оборотах
- Простота схемотехники
- Низкая стоимость компонентов
- Малые габариты и вес
Недостатки:
- Наличие пульсаций тока и момента двигателя
- Повышенный уровень электромагнитных помех
- Необходимость применения фильтров
- Повышенный нагрев двигателя на малых оборотах
- Возможность выхода из строя при КЗ в нагрузке
Несмотря на некоторые недостатки, преимущества ШИМ-регуляторов обеспечили им широкое распространение в современной технике.
Настройка и эксплуатация ШИМ-регулятора оборотов
После сборки ШИМ-регулятора оборотов необходимо провести его настройку и соблюдать правила эксплуатации:
Настройка регулятора:
- Установить частоту ШИМ (обычно 1-20 кГц)
- Настроить минимальные и максимальные обороты
- Отрегулировать плавность хода на малых оборотах
- Проверить работу защиты от перегрузки (при наличии)
Правила эксплуатации:
- Обеспечить хорошее охлаждение силовых элементов
- Не превышать максимальный ток нагрузки
- Использовать качественные комплектующие
- Применять помехоподавляющие фильтры
- Периодически проверять надежность соединений
При правильной настройке и эксплуатации ШИМ-регулятор обеспечит длительную и надежную работу.

Улучшенный ШИ регулятор на TL494
Вернуться в раздел электроники
Улучшенный ШИМ контроллер на TL494
Автор статьи: Токмаков Н.М., Сыктывкар, 2011г.
Статья продолжает тему создания устройств управления мощными электродвигателями. В данном случае рассматривается
устройство для управления электродвигателем с напряжением питания 24 вольта и мощностью до 2-х киловатт. Но регулятор можно применить и для других напряжений и
мощностей, для этого его требуется дополнить устройством понижения напряжения питания электронной части, а транзисторы заменить на другие подходящие
по мощности и допустимым напряжениям и токам. Выходной каскад устройства способен управлять десятком указанных на схеме транзисторов.
Ранее на сайте уже размещена схема ШИМ регулятора оборотов коллекторного электродвигателя на микросхеме TL494, но как
оказалось она имеет недостаток связанный с неполным диапазоном регулирования мощности.
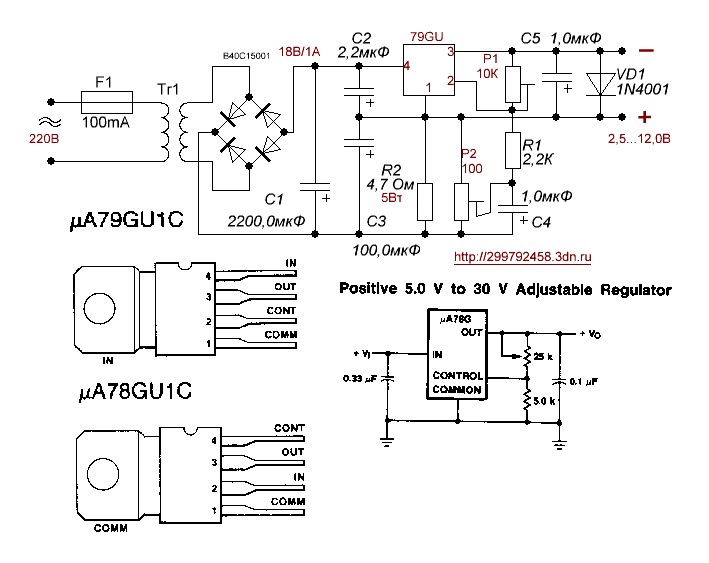
Принципиальная схема регулятора:
Верхнее положение задатчика оборотов соответствует отсутствию управляющих импульсов. Нижнее положение — максимальной
мощности. Резисторами R3 и R1 можно изменить сектор работы рабочего органа потенциометра.
Схема разрабатывалась и испытывалась на электротрайке с напряжением тяговой батареи 24 вольта. Поэтому некоторые элементы
расчитаны на питание от 24 вольт, в частности узел питания на интегральном стабилизаторе DA1. При использовании более высокого напряжения необходимо
позаботиться о понижении питания до разумной величины (30-18 вольт) или запитать от отдельной батареи аккумуляторов.
Силовые выходные транзисторы должны иметь рабочее напряжение не менее 2-х кратно большее напряжения тяговой батареи, а суммарный ток
сборки транзисторов в 2-4 раза больше номинального тока нагрузки.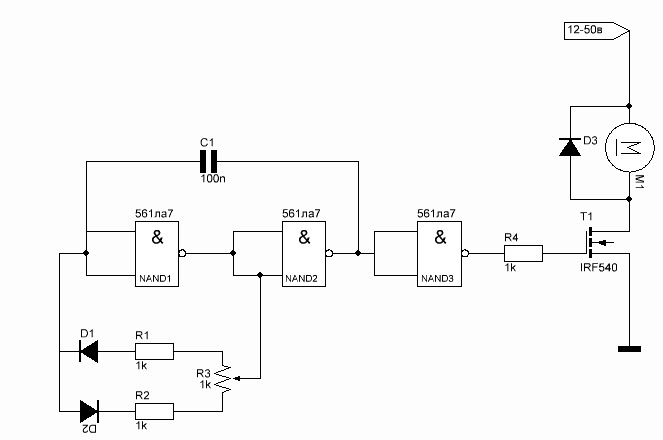
В качестве главного управляющего элемента устройства используется микросхема типа TL494CN, выпускаемая фирмой TEXAS
INSTRUMENT (США). Она выпускается рядом зарубежных фирм под разными наименованиями. Например,
фирма SHARP (Япония) выпускает микросхему IR3M02, фирма FAIRCHILD (США) —
иА494, фирма SAMSUNG (Корея) — КА7500, фирма FUJITSU (Япония) — МВ3759, есть ещё mPC494,TL493,TL495,TL594 и
т.д. Все эти микросхемы являются полными аналогами отечественной микросхемы КР1114ЕУ4 (М1114ЕУ4,K1006EУ4).
Есть ещё отечественная микросхема M1114ЕУ3, но у неё изменена разводка выводов по ножкам микросхемы.
TL594 — аналог TL494 c
улучшенной точностью усилителей ошибки и компаратора.
TL598 — аналог TL594 c двухтактным (pnp-npn) повторителем на
выходе.
Плюсы:
Развитые цепи управления, два
дифференциальный усилителя (могут выполнять и логические функции)
Минусы:
Однофазные выходы требуют
дополнительной обвески (по сравнению с UC3825).![]() Недоступно токовое
управление, относительно медленная петля обратной связи. Синхронное
включение двух и более ИС не так удобно, как в UC3825.
Недоступно токовое
управление, относительно медленная петля обратной связи. Синхронное
включение двух и более ИС не так удобно, как в UC3825.
Не будем подробно рассматривать устройство и работу этой
управляющей микросхемы. ЗДЕСЬ можно посмотреть статью c описанием работы
микросхемы.
Разводка печатной платы регулятора:
На рисунке должно быть все понятно. Размер печатной платы из одностороннего фольгированного стеклотекстолита
63 х 71 мм. Обратите внимание: дорожки питания разведены таким образом, что силовая и управляющая части запитаны отдельными проводниками.
Это принципиально.
 При аккуратной сборке выходные импульсы должны иметь такой вид выходного сигнала с формирователя импульсов:
При аккуратной сборке выходные импульсы должны иметь такой вид выходного сигнала с формирователя импульсов:
При самостоятельной разводке печатной платы транзисторы VT2 и VT3 следует ставить ближе к источнику питания, а между эмиттерами транзисторов
установить керамический конденсатор в непосредственно близости к ним.
Силовой модуль, куда входят резисторы R11-R15, транзисторы VT4-VT7, диод VD2 изготавливается отдельно с тщательным соблюдением требований к силовым
устройствам. А диод VD2 вообще рекомендую ставить вблизи электродвигателя или на его клеммы, снабдив небольшим радиатором с площадью пластин 30-50 кв.см.
Обратите внимание на подвод токосьемных проводников. После запаивания транзисторов и резисторов, надо уделить особое внимание
прокладке электрических проводов. Необходимо проложить медные жилы непосредственно до выводов транзисторов. И чем толще, тем лучше. Удельные сопротивления
припоя и меди различаются почти в десять раз. Поэтому в силовых цепях на припой как на проводник электричества расчитывать не следует. Он создает значительное
падение напряжения, что является причиной неравномерной загрузки силовых транзисторов и как следствие ведет к проблемам с качественной работой всего
устройства в целом.
Чтобы не быть голословным приведу удельные сопротивления: медь — 0.0175 Ом*мм2/м, припой — 0.167 Ом*мм2/м (олово-0.115, свинец-0.221)
Поэтому в силовых цепях на припой как на проводник электричества расчитывать не следует. Он создает значительное
падение напряжения, что является причиной неравномерной загрузки силовых транзисторов и как следствие ведет к проблемам с качественной работой всего
устройства в целом.
Чтобы не быть голословным приведу удельные сопротивления: медь — 0.0175 Ом*мм2/м, припой — 0.167 Ом*мм2/м (олово-0.115, свинец-0.221)
Управляющий сигнал к силовому блоку подвести витым проводом и в центр сборки, а еще лучше для каждого транзистора свою витую пару, но это уже как
идеальный вариант.
Демпферный диод VD3 можно установить как в силовом блоке (если есть место) так и непосредственно на электродвигатель, либо по пути прокладки силовых кабелей.
Возможно для кого-то представит интерес следующая схема устройства регулятора. Она несколько проще, но имеется недостаток в виде
не полного регулирования мощности. Это связано с тем, что ключи имеют паузу (Dead time) для предотвращения сквозных токов в работе двухтактных каскадов. Это
не позволяет использовать несколько последних процентов мощности нагрузки. Фотография осциллограммы наглядно показывает этот факт.
Это
не позволяет использовать несколько последних процентов мощности нагрузки. Фотография осциллограммы наглядно показывает этот факт.
Устройтва не имеют собственной защиты от перегрузок и коротких замыканий, поэтому используйте амперметр для контроля тока в нагрузке.
На базе вышеуказанной схемы разработано устройтво с защитой по току в нагрузке.
Используя опыт изготовления ШИМ регуляторов двигателей постоянного тока для электромобилей, наш украинский коллега из п.Долина Иваново-Франковской области Александр Сорочка разработал и собрал действующий контроллер для электродвигателя. (кликнуть по рисунку для открытия в отдельном окне)
Схема разрабатывалась с помощью программы Splan v5.0, печатная плата программой SprintLayOut v4.0. Их легко найти на просторах Интернета.
Программы также можно скачать здесь на сайте в разделе «Архивы». Они легко и быстро осваиваются в работе даже начинающими.
Для удобства работы с документацией предлагается возможность скачать исходные файлы СХЕМЫ и ЧЕРТЕЖА платы. Не лишне сообщить, что чертеж последней печатной платы возможно применить для изготовления всех устройств представленных в статье, просто некоторые соединения выполнить перемычками через имеющиеся отверстия в плате.
Для управления драйвером (ШИМ регулятором) традиционно применяю датчик положения дроссельной заслонки типа 39.3855 от ВАЗовских автомобилей.
Он устроен не совсем так как хотелось бы. Была попытка разобрать его и усовершенствовать. Разобрать удалось, но усовершенствовать не представляется возможным.
Может быть кому-то удастся это сделать. Вот его конструкция (по контуру крышки залит компаунд, он легко колется резаком):
После сборки крышечку залить селиконовым герметиком, излишки удалить до высыхания.
Вернуться в раздел электроники, к другим схемам ШИМ
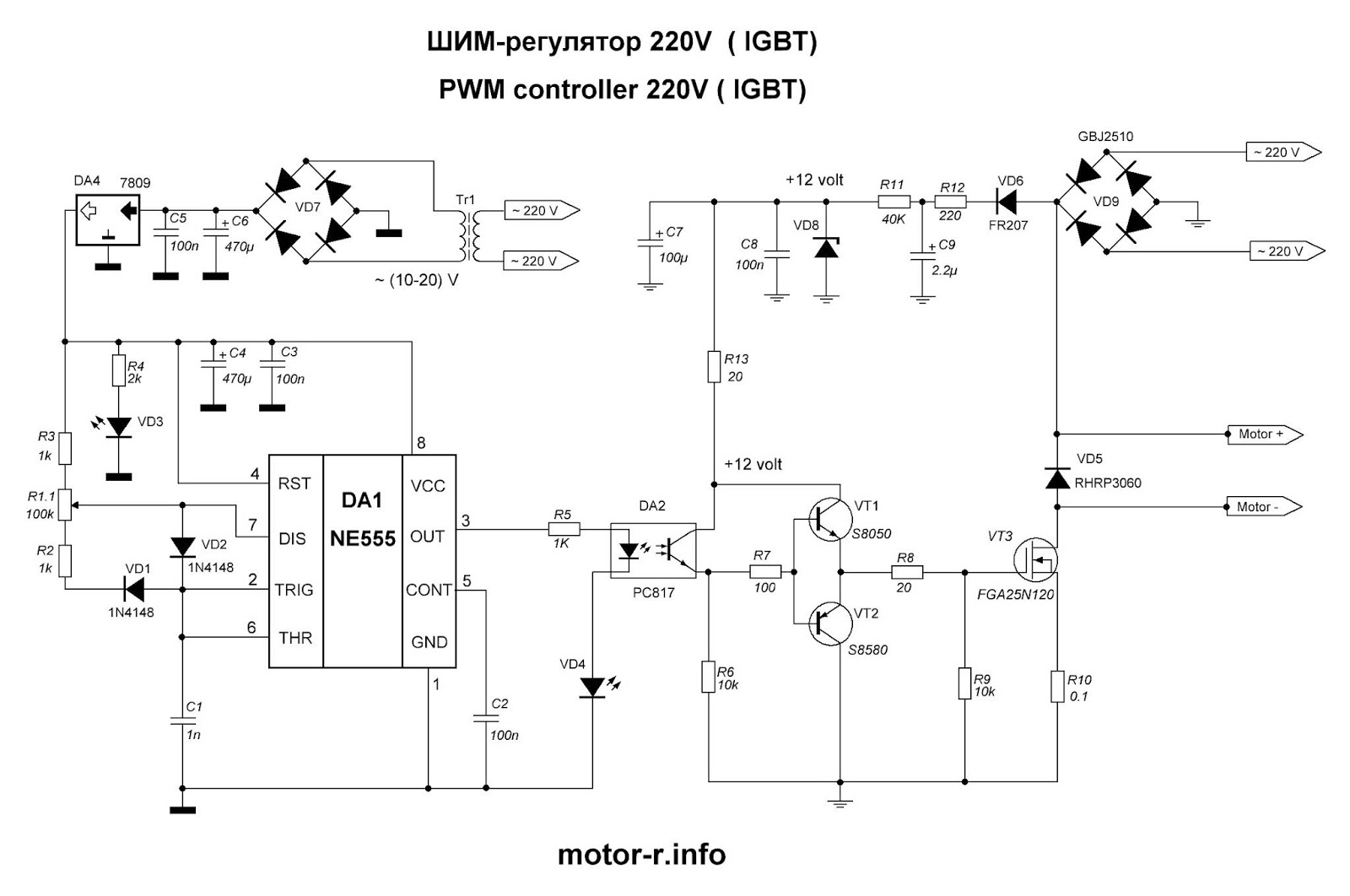
Шим регулятор 220 вольт.
 Что такое ШИМ — широтно-импульсная модуляция?
Что такое ШИМ — широтно-импульсная модуляция?Что такое ШИМ-регулятор?
Теперь, когда мы знаем, что такое широтно-импульсная модуляция, можно поговорить и о главной теме статьи. Используется ШИМ-регулятор для того, чтобы регулировать напряжение питания и для недопущения мощных инерционных нагрузок в авто- и мототехнике. Это может звучать слишком сложно и лучше всего пояснить на примере. Допустим, необходимо сделать, чтобы лампы освещения салона меняли свою яркость не сразу, а постепенно.
Это же относится к габаритным огням, автомобильным фарам или вентиляторам. Воплотить такое желание можно путём установки транзисторного регулятора напряжения (параметрический или компенсационный). Но при большом токе на нём будет выделяться чрезвычайно большая мощность и потребуется установка дополнительных больших радиаторов или дополнение в виде системы принудительного охлаждения с использованием маленького вентилятора, снятого с компьютерного устройства. Как видите, данный путь влечёт за собой много последствий, которые необходимо будет преодолеть.
Настоящим спасением из данной ситуации стал ШИМ-регулятор, который работает на мощных полевых силовых транзисторах. Они могут коммутировать большие токи (которые достигают 160 Ампер) при напряжении всего в 12-15В на затворе. Следует отметить, что сопротивление у открытого транзистора довольное мало, и благодаря этому можно заметно снизить уровень рассеиваемой мощности.
Чтобы создать свой собственный ШИМ-регулятор, понадобится схема управления, которая сможет обеспечить разность напряжения между истоком и затвором в границах 12-15В. Если этого не получится достичь, то сопротивление канала будет сильно увеличиваться и значительно возрастёт рассеиваемая мощность. А это, в свою очередь, может привести к тому, что транзистор перегреется и выйдет из строя.
Выпускается целый ряд микросхем для ШИМ-регуляторов, которые смогут выдержать повышение входного напряжения до уровня 25-30В, при том, что питание будет всего 7-14В. Это позволит включать выходной транзистор в схеме вместе с общим стоком.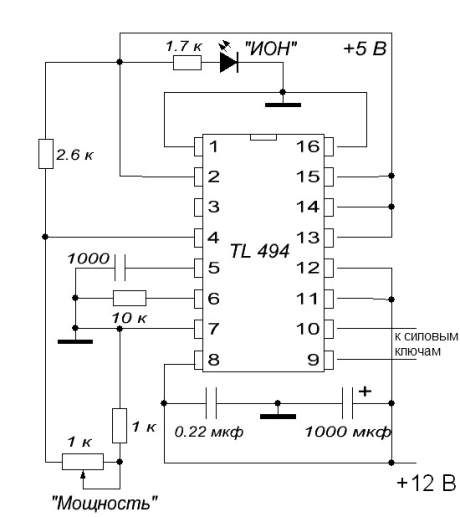 Это, в свою очередь, необходимо для подключения нагрузки с общим минусом. В качестве примеров можно привести такие образцы: L9610, L9611, U6080B … U6084B. Большинство нагрузок не потребляет ток больше 10 ампер, поэтому они не могут вызвать просадку напряжения. И как результат – использовать можно и простые схемы без доработки в виде дополнительного узла, который будет повышать напряжение.
Это, в свою очередь, необходимо для подключения нагрузки с общим минусом. В качестве примеров можно привести такие образцы: L9610, L9611, U6080B … U6084B. Большинство нагрузок не потребляет ток больше 10 ампер, поэтому они не могут вызвать просадку напряжения. И как результат – использовать можно и простые схемы без доработки в виде дополнительного узла, который будет повышать напряжение.
И именно такие образцы ШИМ-регуляторов и будут рассмотрены в статье. Они могут быть построены на основе несимметрического или ждущего мультивибратора. Стоит поговорить про ШИМ-регулятор оборотов двигателя. Об этом далее.
Схема №1
Эта схема ШИМ-регулятора собиралась на инверторах КМОП-микросхемы. Она является генератором прямоугольных импульсов, который действует на 2-х логических элементах. Благодаря диодам здесь отдельно изменяется постоянная времени разряда и заряда частотозадающего конденсатора. Это позволяет менять скважность, которую имеют выходные импульсы, и как результат – значение эффективного напряжения, которое есть на нагрузке
. В данной схеме возможно использование любых инвертирующих КМОП-элементов, а также ИЛИ-НЕ и И. В качестве примеров подойдут К176ПУ2, К561ЛН1, К561ЛА7, К561ЛЕ5. Можно использовать и другие виды, но перед этим придётся хорошо подумать о том, как правильно сгруппировать их входы, чтобы они могли выполнять возложенный функционал. Преимущества схемы – доступность и простота элементов. Недостатки – сложность (практически невозможность) доработки и несовершенство относительно изменения диапазона выходного напряжения.
В данной схеме возможно использование любых инвертирующих КМОП-элементов, а также ИЛИ-НЕ и И. В качестве примеров подойдут К176ПУ2, К561ЛН1, К561ЛА7, К561ЛЕ5. Можно использовать и другие виды, но перед этим придётся хорошо подумать о том, как правильно сгруппировать их входы, чтобы они могли выполнять возложенный функционал. Преимущества схемы – доступность и простота элементов. Недостатки – сложность (практически невозможность) доработки и несовершенство относительно изменения диапазона выходного напряжения.
Схема №2
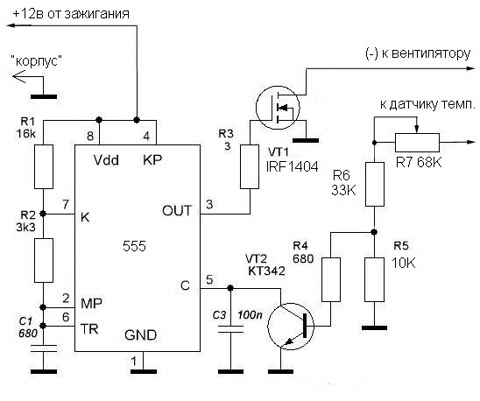
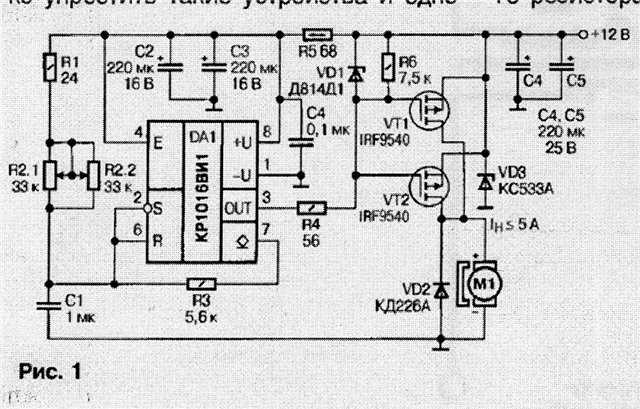
Обладает лучшими характеристиками, нежели первый образец, но сложнее в выполнении. Может регулировать эффективное напряжение на нагрузке в диапазоне 0-12В, до которого изменяется с начального значения 8-12В. Максимальный ток зависит от типа полевого транзистора и может достигать значительных значений. Учитывая, что выходное напряжение является пропорциональным входному управляющему, данную схему можно использовать как часть системы регулирования (для поддержки уровня температуры)
Широтно-импульсное регулирование ШИР
В западной литературе практически не различают понятия широтно-импульсного регулирования ШИР и широтно-импульсной модуляции ШИМ.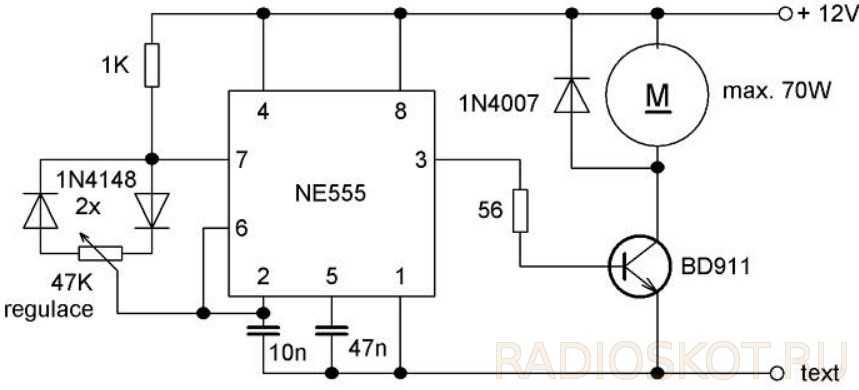 Однако у нас различие между ними все же существует.
Однако у нас различие между ними все же существует.
Сейчас во многих микросхемах, особенно применяемых в DC-DC преобразователях, реализован принцип ШИР. Но при этом их называют ШИМ контроллерами. Поэтому теперь различие в названии между этими двумя способами практически отсутствует.
В любом случае для формирования определенной длительности импульса, подаваемого на базу транзистора и открывающего последний, применяют источники опорного и задающего напряжения, а также компаратор.
Рассмотрим упрощенную схему, в которой аккумуляторная батарея GB питает потребитель Rн импульсным способом посредством транзистора VT. Сразу скажу, что в данной схеме я специально не использовал такие элементы, необходимые для работы схемы: конденсатор, дроссель и диод. Это сделано с целью упрощения понимания работы ШИМ, а не всего преобразователя.
Упрощенно, компаратор имеет три вывода: два входа и один выход. Компаратор работает следующим образом. Если величина напряжения на входном выводе «+» (неинвертирующий вход) выше, чем на входе «-» (инвертирующий вход), то на выходе компаратора будет сигнал высокого уровня.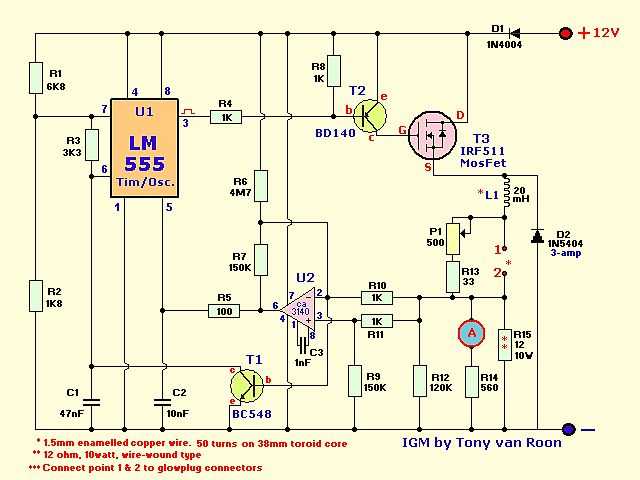 В противном случае – низкого уровня.
В противном случае – низкого уровня.
В нашем случае, именно сигнал высокого уровня открывает транзистор VT. Рассмотрим, как формируется необходимая длительность времени импульса tи. Для этого воспользуемся следующим графиком.
При ШИР на одни вход компаратора подается сигнал пилообразной формы заданной частоты. Его еще называют опорным. На второй вход подается задающее напряжение, которое сравнивается с опорным. В результате сравнения на выходе компаратора формируется импульс соответствующей длительности.
Если на неинверитирующем входе компаратора опорный сигнал, то сначала будет идти пауза, а затем импульс. Если на неинвертирующий вход подать задающий сигнал, то сначала будет импульс, затем пауза.
Таким образом, изменяя значение задаваемого сигнала, можно изменять коэффициент заполнения, а соответственно и среднее напряжение на нагрузке.
Частоту опорного сигнала стремятся сделать максимальной, чтобы снизить параметры дросселей и конденсаторов (на схеме не показаны).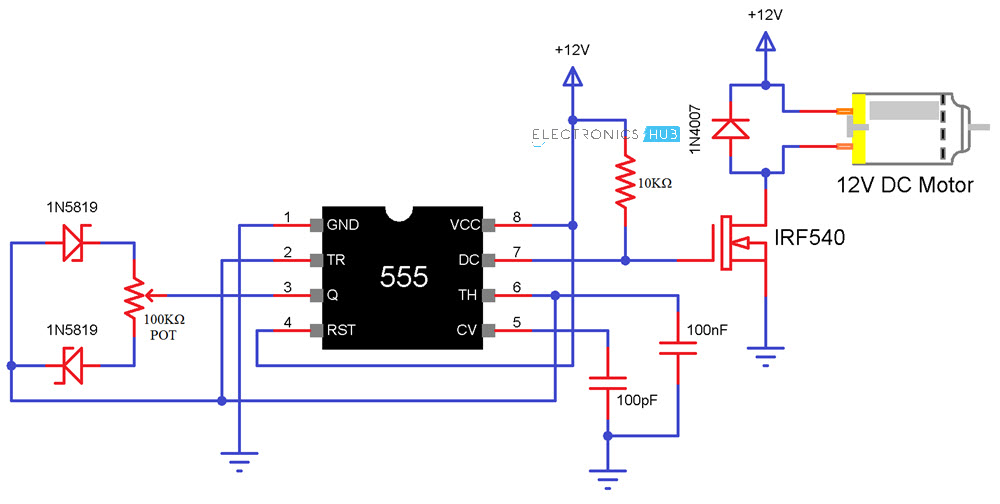 Последнее приводит к снижению массы и габаритов импульсного блока питания.
Последнее приводит к снижению массы и габаритов импульсного блока питания.
ШИМ – широтно-импульсная модуляция
ШИМ в преобладающем большинстве применяется для формирования сигнала синусоидальной формы. Часто ШИМ применяется для управления работой инверторного преобразователя. Инвертор предназначен для преобразования энергии постоянного тока в энергию переменного тока.
Рассмотрим простейшую схему инвертора напряжения.
В один момент времени открывается пара транзисторов VT1 и VT3. Создается путь для протекания тока от аккумулятора GB через активно-индуктивную нагрузку RнLн. В следующий момент VT1 и VT3 заперты, а открыты диагонально противоположные транзисторы VT2 и VT4. Теперь тока протекает от аккумулятора через RнLн в противоположном направлении. Таким образом, ток на нагрузке изменяет свое направление, поэтому является переменным. Как видно, ток на нагрузке не является синусоидальным. Поэтому применяют ШИМ для получения синусоидально формы тока.
Поэтому применяют ШИМ для получения синусоидально формы тока.
Существует несколько типов ШИМ: однополярная, двухполярная, одностороння, двухсторонняя. Здесь мы не будем останавливаться на каждом конкретном типе, а рассмотрим общий подход.
В качестве модулирующего сигнала применяется синусоида, а опорным является сигнал треугольной формы. В результате сравнивания этих сигналов формируются длительности импульсов и пауз (нижний график), которые управляют работой транзисторов VT1…VT4.
Обратите внимание, что амплитуда напряжения на нагрузке всегда равна амплитуде источника питания. Также остается неизменным период следования импульсов. Изменяется лишь ширина открывающего импульса. Поэтому при подключении нагрузки ток, протекающий через нее, будет иметь синусоидальную форму (показано пунктиром на нижнем графике).
Так вот, основное отличие между ШИР и ШИМ заключается в том, что при широтно-импульсном регулировании время импульса и паузы сохраняют постоянное значение. А при широтно-импульсной модуляции изменяются длительности импульсов и пауз, что позволяет реализовать выходной сигнал заданной формы.
А при широтно-импульсной модуляции изменяются длительности импульсов и пауз, что позволяет реализовать выходной сигнал заданной формы.
ШИМ регулятор напряжения 12 вольт — описание
Особенностью данных схем является возможность применить фактически любые имеющиеся в наличии операционные усилители, с напряжение питания на уровне 12 вольт, например, операционный усилитель LM324 или операционный усилитель LM358.
Изменяя величину напряжения на неинвертирующем входе операционного усилителя (вывод 3) можно изменять величину выходного напряжения. Таким образом, эти схемы можно использовать как регулятор тока и напряжения, в диммерах, а также в качестве регулятора оборотов двигателя постоянного тока.
Схемы достаточно просты, состоят из простых и доступных радиокомпонентов и при верном монтаже сразу начинают работать. В качестве управляющего ключа применен мощный полевой n- канальный транзистор. Мощность полевого транзистора, а так же площадь радиатора, необходимо подобрать согласно току потребления нагрузки.
Для предупреждения пробоя затвора полевого транзистора, в случае использовании ШИМ регулятора с напряжением питания 24 вольта, необходимо между затвором VT2 и коллектором транзистора VT1 подключить сопротивление величиной в 1 кОм, а параллельно сопротивлению R7 подключить стабилитрон на 15 вольт.
В случае если необходимо изменять напряжение на нагрузке, один из контактов которой подсоединен к «массе» (такое встречается в автомобиле), то применяется схема, в которой к плюсу источника питания подсоединяется сток n -канального полевого транзистора, а нагрузка подключается к его истоку.
Желательно для создания условий, при котором открытие полевого транзистора будет происходить в полной мере, цепь управления затвором должна содержать узел с повышенным напряжением порядка 27…30 вольт. В этом случае напряжение между истоком и затвором будет более 15 В.
Если ток потребления нагрузкой менее 10 ампер, то возможно применить в ШИМ регуляторе мощные полевые p- канальные транзисторы.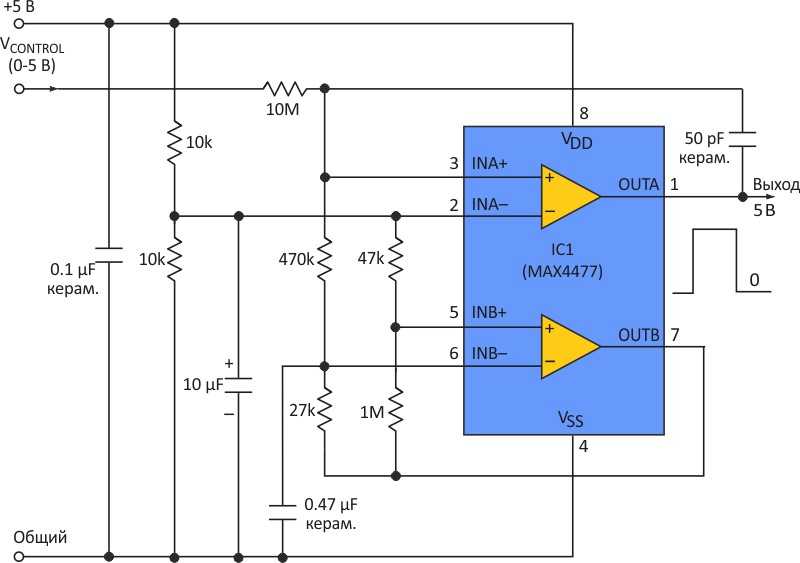
Во второй схеме ШИМ регулятор напряжения 12 вольт меняется и вид транзистора VT1, а также меняется направление вращения переменного резистора R1. Так у первого варианта схемы, уменьшение напряжения управления (ручка потенциометра перемещается к «-» источника питания) вызывает увеличение напряжения на выходе. У второго варианта все наоборот.
В чём отличия ШИМ от ШИР
В зарубежной технической литературе нет отличия между широтно-импульсной модуляцией и широтно-импульсным регулированием (ШИР). Российские же специалисты эти понятия пытаются разграничить. На самом деле ШИМ – это вид модуляции, то есть изменения несущего сигнала под действием другого, модулирующего. Несущий сигнал выполняет роль переносчика информации, а модулирующий задает эту информацию. А широтно-импульсное регулирование – это регулирование режима нагрузки с помощью ШИМ.
Причины и области применения ШИМ
Принцип широтно-импульсной модуляции используется в регуляторах частоты вращения мощных асинхронных двигателей.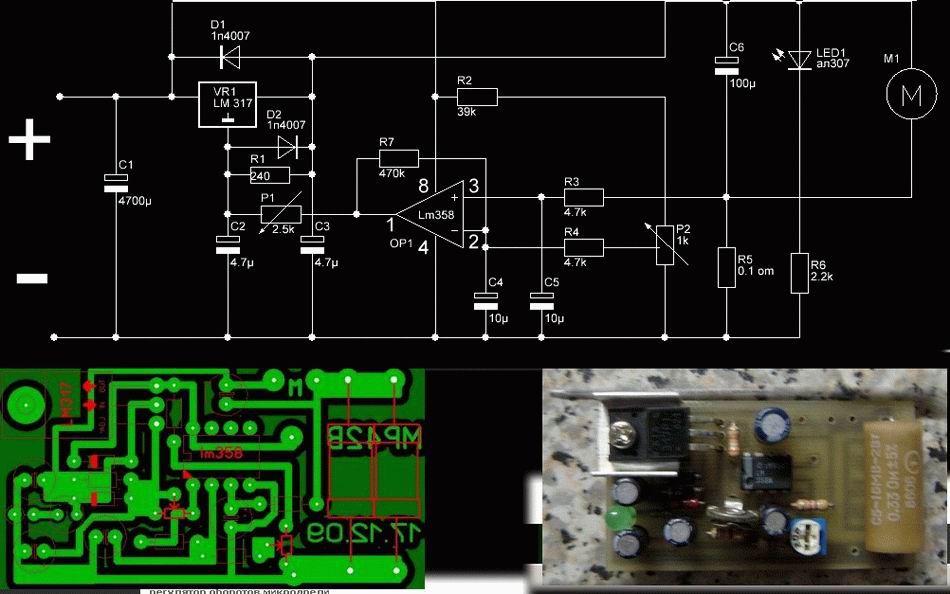 В этом случае модулирующий сигнал регулируемой частоты (однофазный или трехфазный) формируется маломощным генератором синусоиды и накладывается на несущую аналоговым способом. На выходе получается ШИМ-сигнал, который подается на ключи потребной мощности. Дальше можно пропустить получившуюся последовательность импульсов через фильтр низкой частоты, например через простую RC-цепочку, и выделить исходную синусоиду. Или можно обойтись без нее – фильтрация произойдет естественным образом за счёт инерции двигателя. Очевидно, что чем выше частота несущей, тем больше форма выходного сигнала близка к исходной синусоиде.
В этом случае модулирующий сигнал регулируемой частоты (однофазный или трехфазный) формируется маломощным генератором синусоиды и накладывается на несущую аналоговым способом. На выходе получается ШИМ-сигнал, который подается на ключи потребной мощности. Дальше можно пропустить получившуюся последовательность импульсов через фильтр низкой частоты, например через простую RC-цепочку, и выделить исходную синусоиду. Или можно обойтись без нее – фильтрация произойдет естественным образом за счёт инерции двигателя. Очевидно, что чем выше частота несущей, тем больше форма выходного сигнала близка к исходной синусоиде.
Возникает естественный вопрос – а почему нельзя усилить сигнал генератора сразу, например, применением мощных транзисторов? Потому что регулирующий элемент, работающий в линейном режиме, будет перераспределять мощность между нагрузкой и ключом. При этом на ключевом элементе впустую рассеивается значительная мощность. Если же мощный регулирующий элемент работает в ключевом режиме (тринистор, симистор, RGBT-транзистор), то мощность распределяется во времени.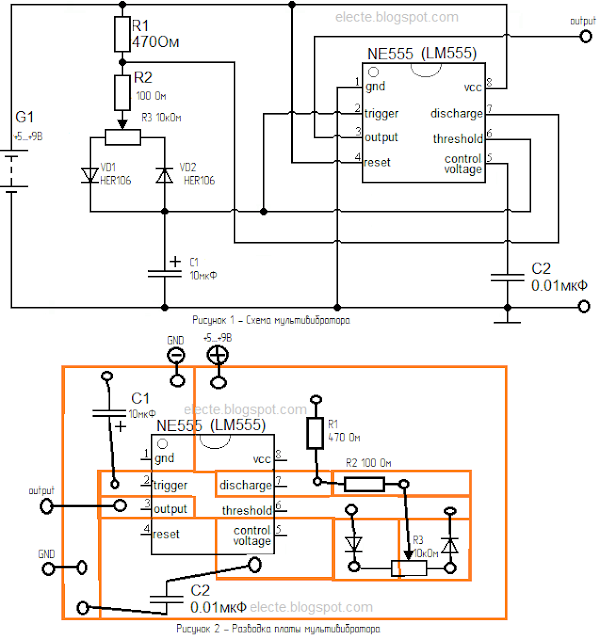 Потери будут намного ниже, а КПД – намного выше.
Потери будут намного ниже, а КПД – намного выше.
В цифровой технике особой альтернативы широтно-импульсному регулированию нет. Амплитуда сигнала там постоянна, менять напряжение и ток можно лишь промодулировав несущую по ширине импульса и впоследствии усреднив её. Поэтому ШИМ применяют для регулирования напряжения и тока на тех объектах, которые могут усреднять импульсный сигнал. Усреднение происходит разными способами:
- За счет инерции нагрузки. Так, тепловая инерция термоэлектронагревателей и ламп накаливания позволяет объектам регулирования заметно не остывать в паузах между импульсами.
- За счёт инерции восприятия. Светодиод успевает погаснуть от импульса к импульсу, но человеческий глаз этого не замечает и воспринимает как постоянное свечение с различной интенсивностью. На этом принципе построено управление яркостью точек LED-мониторов. Но незаметное мигание с частотой несколько сот герц все же присутствует и служит причиной усталости глаз.
- За счет механической инерции.
 Это свойство используется при управлении коллекторными двигателями постоянного тока. При правильно выбранной частоте регулирования двигатель не успевает затормозиться в бестоковых паузах.
Это свойство используется при управлении коллекторными двигателями постоянного тока. При правильно выбранной частоте регулирования двигатель не успевает затормозиться в бестоковых паузах.
Поэтому ШИМ применяют там, где решающую роль играет среднее значение напряжения или тока. Кроме упомянутых распространенных случаев, методом PWM регулируют средний ток в сварочных аппаратах и зарядных устройствах для аккумуляторных батарей и т.д.
Если естественное усреднение невозможно, во многих случаях эту роль на себя может взять уже упомянутый фильтр низкой частоты (ФНЧ) в виде RC-цепочки. Для практических целей этого достаточно, но надо понимать, что без искажений выделить исходный сигнал из ШИМ с помощью ФНЧ невозможно. Ведь спектр PWM содержит бесконечно большое количество гармоник, которые неизбежно попадут в полосу пропускания фильтра. Поэтому не стоит строить иллюзий по поводу формы восстановленной синусоиды.
Очень эффективно и эффектно управление методом ШИМ RGB-светодиодом. Этот прибор имеет три p-n перехода – красный, синий, зеленый. Изменяя раздельно яркость свечения каждого канала, можно получить практически любой цвет свечения LED (за исключением чистого белого). Возможности по созданию световых эффектов с помощью PWM безграничны.
Этот прибор имеет три p-n перехода – красный, синий, зеленый. Изменяя раздельно яркость свечения каждого канала, можно получить практически любой цвет свечения LED (за исключением чистого белого). Возможности по созданию световых эффектов с помощью PWM безграничны.
Наиболее употребительная сфера применения цифрового сигнала, промодулированного по длительности импульса – регулирование среднего тока или напряжения, протекающего через нагрузку. Но возможно и нестандартное использование этого вида модуляции. Все зависит от фантазии разработчика.
Обзор типичных схем
Регулировать вращения вала электродвигателя малой мощности можно посредством последовательного соединения резистора питания с отсутствие. Однако у такого варианта имеется очень низкий КПД и отсутствие возможности плавного изменения скорости. Чтобы избежать такой неприятности, следует рассмотреть несколько схем регулятора, которые применяются чаще всего.
Как известно, ШИМ имеет постоянную амплитуду импульсов. Кроме того, амплитуда идентична напряжению питания. Следовательно, электродвигатель не остановится, даже работая на малых оборотах.
Кроме того, амплитуда идентична напряжению питания. Следовательно, электродвигатель не остановится, даже работая на малых оборотах.
Второй вариант аналогичен первому. Единственное отличие, что в качестве задающего генератора используется операционный усилитель. Этот компонент имеет частоту 500 Гц и занимается выработкой импульсов, имеющих треугольную форму. Регулировка также осуществляется переменным резистором.
Как изготовить своими руками?
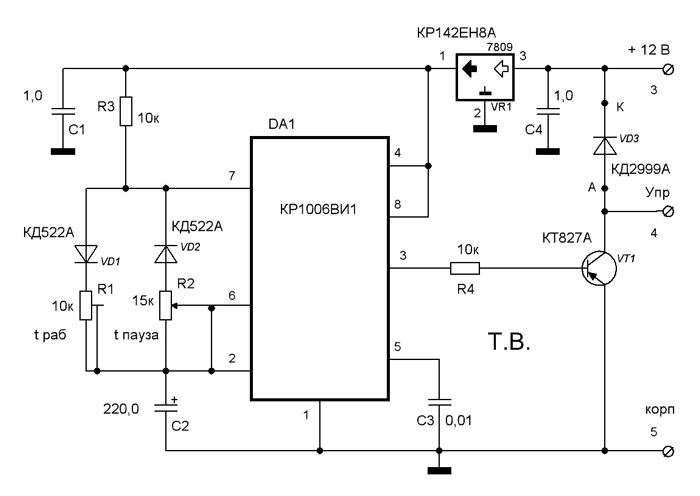
Существуют различные варианты схем регулировки. Приведём один из них более подробно.
Вот схема его работы:
Первоначально, это устройство было разработана для регулировки коллекторного двигателя на электротранспорте. Речь шла о таком, где напряжение питания составляет 24 В, но эта конструкция применима и для других двигателей.
Слабым местом схемы, которое было определено при испытаниях её работы, является плохая пригодность при очень больших значениях силы тока. Это связано с некоторым замедлением работы транзисторных элементов схемы.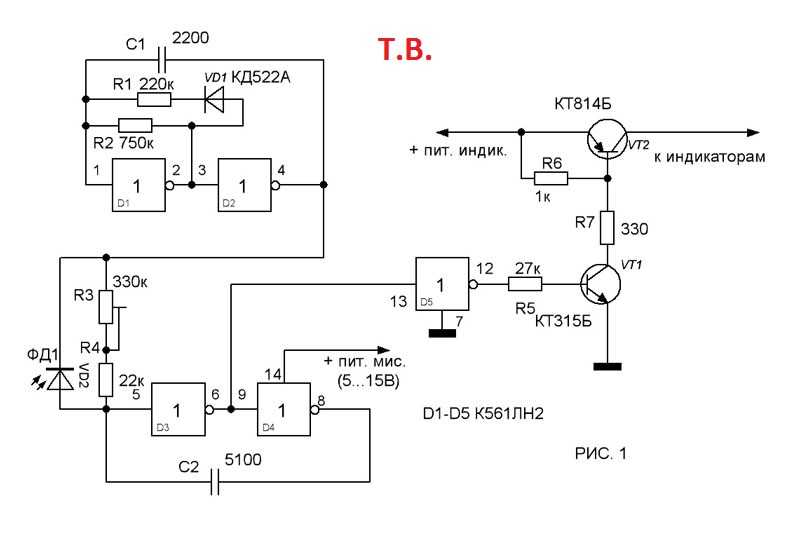
Рекомендуется, чтобы ток составлял не более 70 А. В этой схеме нет защиты по току и по температуре, поэтому рекомендуется встроить амперметр и контролировать силу тока визуально. Частота коммутации составит 5 кГц, она определяется конденсатором C2 ёмкостью 20 нф.
При изменении силы тока, эта частота может изменяться между 3 кГц и 5 кГц. Переменный резистор R2 служит для регулировки тока. При использовании электродвигателя в бытовых условиях, рекомендуется использовать регулятор стандартного типа.
При этом, рекомендуется подобрать величину R1 таким образом, чтобы правильно настроить работу регулятора. С выхода микросхемы, управляющий импульс поступает на двухтактный усилитель на транзисторах КТ815 и КТ816, далее идёт уже на транзисторы.
Печатная плата имеет размер 50 на 50 мм и изготавливается из одностороннего стеклотекстолита:
На этой схеме дополнительно указаны 2 резистора по 45 ом. Это сделано для возможного подключения обычного компьютерного вентилятора для охлаждения прибора. При использовании в качестве нагрузки электродвигателя, необходимо схему заблокировать блокирующим (демпферным) диодом, который по своим характеристикам соответствует удвоенному значению тока нагрузки и удвоенному значению питающего напряжения.
Работа устройства при отсутствии такого диода может привести к поломке вследствие возможного перегрева. При этом, диод нужно будет поместить на теплоотвод. Для этого, можно воспользоваться металлической пластиной, которая имеет площадь 30 см2.
Регулирующие ключи работают так, что потери мощности на них достаточно малы. В оригинальной схеме, был использован стандартный компьютерный вентилятор. Для его подключения использовалось ограничительное сопротивление 100 Ом и напряжение питания 24 В.
Собранное устройство выглядит следующим образом:
При изготовлении силового блока (на нижнем рисунке), провода должны быть присоединены таким образом, чтобы было минимум изгибов тех проводников по которым проходят большие токи.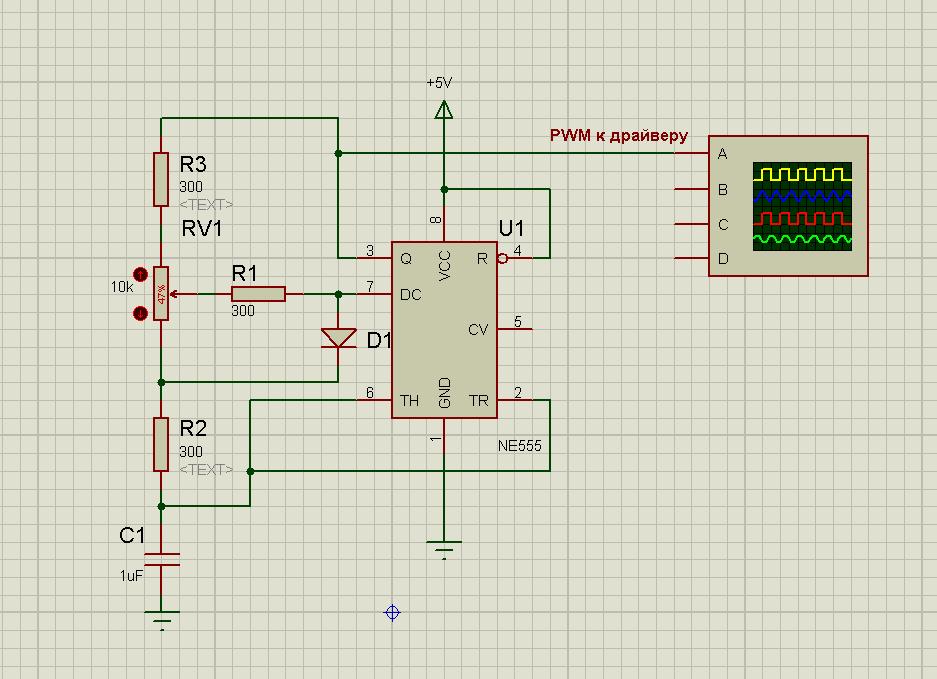 Мы видим, что изготовление такого прибора требует определённых профессиональных знаний и навыков. Возможно, в некоторых случаях имеет смысл воспользоваться покупным устройством.
Мы видим, что изготовление такого прибора требует определённых профессиональных знаний и навыков. Возможно, в некоторых случаях имеет смысл воспользоваться покупным устройством.
Поделки своими руками для автолюбителей
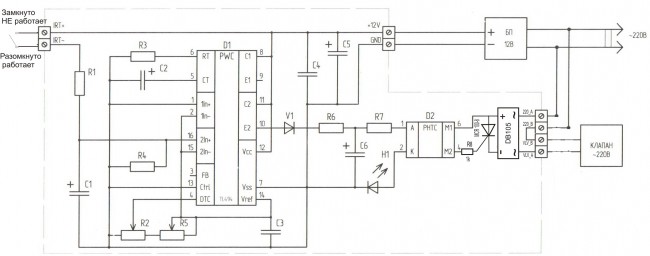
Всем привет, конструируя всевозможные, низковольтные конструкции, иногда возникает необходимость использования специальных узлов, которые защищают схему при превышении или понижении питающего напряжения.
Приведённая схема является очень универсальной и может быть использована например для контроля заряда на аккумуляторе, для защиты источников питания, в частности преобразователей напряжения от повышенного или пониженного входного напряжения.
Схему можно использовать, как в качестве датчика оповещения, так и внедрить в реальную конструкцию, например в преобразователь напряжения, который отключиться если питающее напряжение выше или ниже нормы.
Рассмотрим простой пример, у вас есть повышающий преобразователь на вход, которого нельзя подавать выше 16 вольт и ниже 9.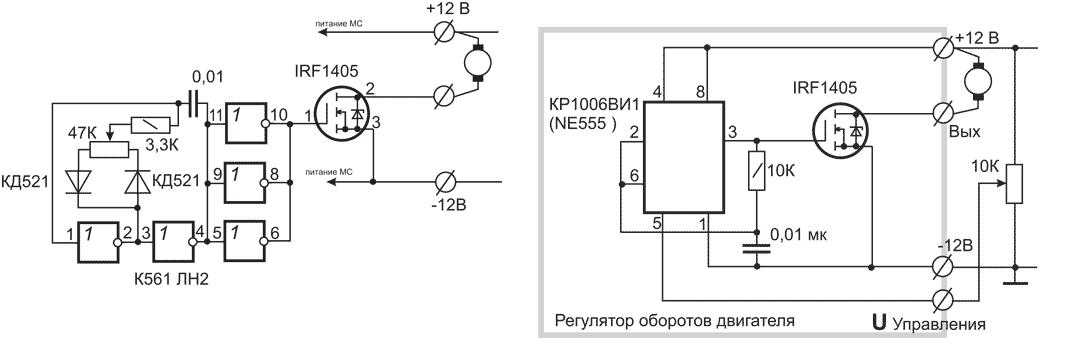 Если подаваемое напряжение выше 16 вольт, может нарушиться работа определенных узлов, также это приводит к нарушению расчетного напряжения на обмотках трансформатора.
Если подаваемое напряжение выше 16 вольт, может нарушиться работа определенных узлов, также это приводит к нарушению расчетного напряжения на обмотках трансформатора.
При низком же входном напряжении, менее 9 вольт, а такое может быть если аккумулятор разряжен, управляющее напряжение на затворах силовых ключей будет менее 9 вольт, что приведет к неполному отпиранию ключей, как следствие сопротивление открытого канала увеличивается, в итоге повышенный нагрев, а при большой нагрузке выход из строя силовых транзисторов.
Также, инвертор не снабжённой такой защитой, может разрядить аккумулятор в хлам и стать причиной выхода его из строя, из-за глубокого разряда. Любой серьёзный инвертор имеет защиту от повышенного и пониженного входного питания.
Рассмотрим схему и принцип её работы.
Имеем компаратор LM339 — это четыре отдельных компаратора в едином корпусе,
в нашей схеме я задействовал всего два канала, на остальных двух можно построить например защиту от коротких замыканий и перегрева.
Кстати компаратор LM339 можно найти на платах некоторых компьютерных блоков питания, микросхема стоит рядом с шин-контроллером.
Первая часть схемы обеспечивает защиту от повышенного питания,
выход компараторов дополнен транзистором, для управления нагрузкой, также данный транзистор является инвертором.
В коллекторную цепь транзистора подключается нагрузка,
звуковой индикатор, светодиод,
обмотка реле или полевой транзистор,
для управления более мощными нагрузками, если это необходимо.
Имеется источник опорного напряжения в лице стабилитрона ZD1, опорное напряжение через делитель в виде подстроечного многооборотного резистора R3 подаётся на неинвертирующий вход компаратора (7), на инвертирующий вход (6), через делитель подано часть напряжения, которое нужно мониторить.
Введите электронную почту и получайте письма с новыми поделками.
Компаратор отслеживает это напряжение, если оно по каким-то причинам становится больше, увеличивается и напряжение на инверсном входе, компаратор понимает, что между его входами напряжение изменилась и моментально выдаёт на выходе низкий уровень сигнала или массу питания.
Почему массу? Если посмотреть на внутреннюю структуру компаратора,
то всё становится ясно, внутренний выходной транзистор, обратной проводимости, подключён эмиттером к массе, при его отпирании на выходе получим массу питания.
Именно поэтому на выходе схемы я добавил дополнительный транзистор прямой проводимости, он сработает при наличие отрицательного сигнала на базе, а на его коллекторе мы получим плюс питания, то есть транзистор инвертирует сигнал и это нужно например для управления мощным N-канальным силовым мосфетом.
Вторая схема устроена и работает точно таким же образом,
только входы подключены наоборот, в данном случае компаратор сработает, если входное напряжение ниже выставленного порога.
По поводу порога срабатывания, его можно выставить путём вращения подстроечного резистора, по факту он меняет опорное напряжение.
Пример использования — защита от повышенного напряжения для отключения аккумулятора при полном заряде, если у вас есть не автоматическое зарядное устройство, оно может перезарядить аккумулятор, что может привести к плачевным последствиям.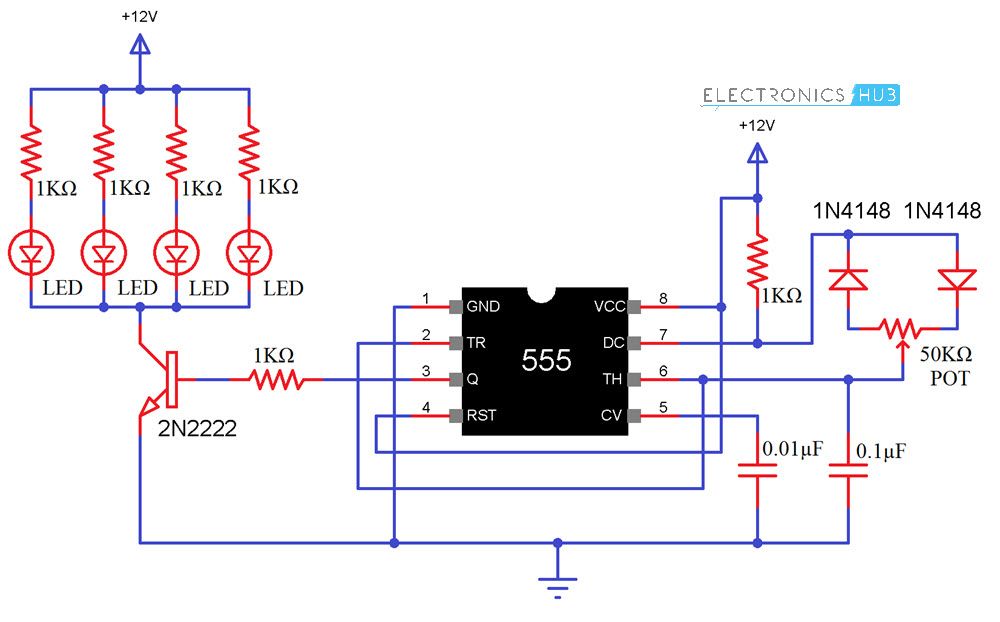
Если устройство дополнить такой схемой, то достаточно выставить порог срабатывания равным напряжению полностью заряженного аккумулятора и устройство автоматически отключится, когда аккумулятор заряжен.
Приведенная схема может работать в достаточно широком диапазоне входных напряжений от пяти до тридцати пяти вольт, ограничено напряжением питания компаратора и токо-гасящим резистором для стабилитрона R1. Именно этот вариант с указанными компонентами рассчитан для работы в диапазоне напряжений, где-то от 6 до 20 вольт, я планировал использовать её для защиты мощного преобразователя напряжения.
Источники
- https://www.syl.ru/article/228758/new_shim-regulyator-shirotno-impulsnaya-modulyatsiya-shema
- https://diodov.net/chto-takoe-shim-shirotno-impulsnaya-modulyatsiya/
- https://www.joyta.ru/6363-shim-regulyator-napryazheniya-na-12v/
- https://odinelectric.ru/knowledgebase/chto-takoe-shim
- https://kurskautoreg.ru/elektroizmeritelnye-pribory/shim-regulator-for-permanent-engines-digital-pwm-regulator-rotation-collector-motor.
 html
html - https://BurForum.ru/svarka/lm393n-primenenie-2.html
Как вам статья?
Павел
Бакалавр «210400 Радиотехника» – ТУСУР. Томский государственный университет систем управления и радиоэлектроники
Написать
Пишите свои рекомендации и задавайте вопросы
Шим регуляторы в Украине. Цены на Шим регуляторы на Prom.ua
Работает
ШИМ регулятор скорости мотора DC 6-28В 3А PWM оборотов VN
Доставка по Украине
321.54 грн
160.77 грн
Купить
V-Nalichii
Работает
ШИМ регулятор скорости мотора DC 12-40В 10А 13КГц PWM оборотов VN
Доставка по Украине
472.99 грн
236.50 грн
Купить
V-Nalichii
Работает
ШИМ регулятор скорости двигателя 10-50В 40А 2000Вт PWM оборотов VN
Доставка по Украине
1 020.54 грн
510.27 грн
Купить
V-Nalichii
Работает
ШИМ регулятор скорости мотора DC 5-16В 10А Mini PWM оборотов 0-99% VN
Доставка по Украине
321. 54 грн
54 грн
160.77 грн
Купить
V-Nalichii
Работает
ШИМ регулятор скорости мотора DC 4.5-35В 5А Mini PWM оборотов 0-100% VN
Доставка по Украине
251.64 грн
125.82 грн
Купить
V-Nalichii
Работает
ШИМ регулятор скорости мотора DC 6-28В 3А PWM оборотов All
Доставка по Украине
321.54 грн
160.77 грн
Купить
All-Goods
Работает
ШИМ регулятор скорости мотора DC 12-40В 10А 13КГц PWM оборотов All
Доставка по Украине
472.99 грн
236.50 грн
Купить
All-Goods
Работает
ШИМ регулятор скорости двигателя 10-50В 40А 2000Вт PWM оборотов All
Доставка по Украине
1 020.54 грн
510.27 грн
Купить
All-Goods
Работает
ШИМ регулятор скорости мотора DC 5-16В 10А Mini PWM оборотов 0-99% All
Доставка по Украине
321.54 грн
160.77 грн
Купить
All-Goods
Работает
ШИМ регулятор скорости мотора DC 4.5-35В 5А Mini PWM оборотов 0-100% All
Доставка по Украине
251. 64 грн
64 грн
125.82 грн
Купить
All-Goods
Работает
Шим регулятор мощности постоянного тока 3-35 V ток 5 A
На складе в г. Черкассы
Доставка по Украине
по 89.38 грн
от 2 продавцов
89.38 грн
Купить
Kuprumart
Работает
Шим регулятор PWM мощности постоянного тока 12-48 V ток 20 A
На складе
Доставка по Украине
по 189.75 грн
от 2 продавцов
189.75 грн
Купить
Kuprumart
Работает
Цифровой шим регулятор мощности постоянного тока 6-30 V ток 5 A
На складе
Доставка по Украине
по 240.62 грн
от 2 продавцов
240.62 грн
Купить
Kuprumart
Работает
Шим регулятор скорости вращения двигателя 6-24 В 3 А в корпусе
На складе
Доставка по Украине
по 137.5 грн
от 2 продавцов
137.50 грн
Купить
Kuprumart
Работает
ШИМ регулятор скорости двигателя 10-55В 60A с реверсом и индикацией
На складе в г.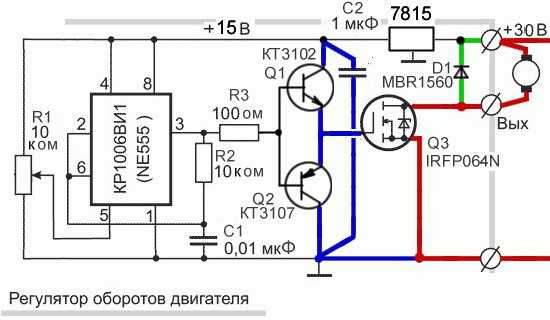 Умань
Умань
Доставка по Украине
682 грн
Купить
Интернет-магазин «FreeBuy.in.ua»
Смотрите также
Работает
ШИМ контроллер регулятор оборотов 9 — 55 вольт 60А
На складе
Доставка по Украине
600 грн
Купить
Doctor Smarts
Работает
ШИМ контроллер, регулятор оборотов 30А
На складе в г. Днепр
Доставка по Украине
550 грн
Купить
Doctor Smarts
Работает
ШИМ регулятор оборотов постоянного тока с реверсом 100А
На складе в г. Днепр
Доставка по Украине
1 100 грн
Купить
Doctor Smarts
Работает
ШИМ регулятор мощности 10-60В, 25кГц, 20А.
На складе в г. Софиевская Борщаговка
Доставка по Украине
200 грн
Купить
«SashaMika»
Работает
ШИМ регулятор скорости DC мотора, 5-30 В, 10A-22S, PWM
На складе в г. Кропивницкий
Кропивницкий
Доставка по Украине
по 185 грн
от 2 продавцов
185 грн
Купить
Sxemki.com
Работает
ШИМ контроллер, регулятор оборотов 60А
На складе
Доставка по Украине
550 грн
Купить
Doctor Smarts
Работает
ШИМ регулятор оборотов 9 — 60 вольт 20А
На складе
Доставка по Украине
370 грн
Купить
Doctor Smarts
Работает
Системна плата UNO R3 Wi-Fi microUSB Arduino
На складе
Доставка по Украине
476 грн
Купить
Интернет-магазин «Мега-Радиодетали»
Работает
ШИМ регулятор скорости двигателя 10-60В 20А hho
На складе в г. Умань
Доставка по Украине
188 грн
Купить
Интернет-магазин «FreeBuy.in.ua»
Работает
ШИМ регулятор скорости двигателя 10-50В 40А 2000Вт PWM оборотов
Заканчивается
Доставка по Украине
400 — 900 грн
от 4 продавцов
480 грн
400 грн
Купить
MegaMag
Работает
ШИМ ZK-MG регулятор оборотов двигателя постоянного тока в корпусе
На складе в г.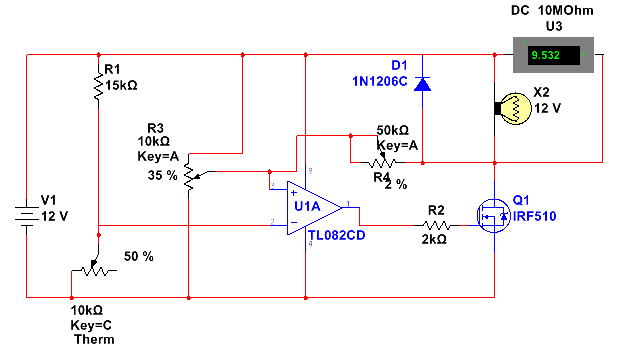 Полтава
Полтава
Доставка по Украине
по 359.99 грн
от 2 продавцов
359.99 грн
Купить
Интернет магазин «E-To4Ka»
Работает
ШИМ регулятор,оборотов, скорости мотора DC 6-60V PWM 15A
На складе
Доставка по Украине
155 грн
Купить
GerBest — Интернет магазин
Работает
ШИМ регулятор,оборотов, скорости мотора DC 6-28V 3A PWM
На складе
Доставка по Украине
85 грн
Купить
GerBest — Интернет магазин
Работает
ШИМ регулятор оборотов двигателя постоянного тока 6В-60В 15A/20А 15кГц с индикацией
На складе в г. Кропивницкий
Доставка по Украине
390 грн
Купить
Sxemki.com
Шим регулятор в Нефтекамске: 256-товаров: бесплатная доставка, скидка-80% [перейти]
Регулятор оборотов Tornadotool ШИМ-10
В МАГАЗИНЕще цены и похожие товары
Регулятор оборотов Tornadotool ШИМ-30
В МАГАЗИНЕще цены и похожие товары
10 843
ШИМ—регулятор и ваттметр EspBBO-01 для тяговых аккумуляторов электромоторов
В МАГАЗИНЕще цены и похожие товары
 mds.yandex.net/get-marketpic/1339901/pic06f06396503a63c68ff1e1601d41a1f8/6hq»>
mds.yandex.net/get-marketpic/1339901/pic06f06396503a63c68ff1e1601d41a1f8/6hq»>870
1714
Регулятор оборотов ШИМ 30А, 6-60В, напряжения в корпусе с дисплеем, управление скоростью вентилятора, двигателя, ламп
В МАГАЗИНЕще цены и похожие товары
 regmarkets.ru/listpreview/idata2/46/8e/468eb912277ae40fba6293e43271054d.jpg»>
regmarkets.ru/listpreview/idata2/46/8e/468eb912277ae40fba6293e43271054d.jpg»>549
1190
Регулятор оборотов кулеров/Реобас 6PIN 300W для 8 вентиляторов 4PIN с выносным ШИМ—регулятором Тип:
В МАГАЗИНЕще цены и похожие товары
1 529
1890
Регулятор оборотов ШИМ 40А, 10-55В (12, 24, 36, 48 В), напряжения в защитном корпусе с выносным потенциометром и реверсивной кнопкой, управление скоростью вентилятора, двигателя, ламп
В МАГАЗИНЕще цены и похожие товары
 jpg»>
jpg»>882
1146
Регулятор оборотов кулера ШИМ, 12 В, 8 каналов, 6 pin / Контроллер скорости вентилятора Реобас для майнинг фермы
В МАГАЗИНЕще цены и похожие товары
639
950
Ручной регулятор вентиляторов (ШИМ регулятор, реобас для вентиляторов, хаб) PWM, 16А, 8х4pin, майнинг ферма
В МАГАЗИНЕще цены и похожие товары
189
300
Регулятор мощности 1,8-15В DC, 2А, 30Вт, ШИМ контроллер Тип: Электронный модуль, Размер: Длина
В МАГАЗИНЕще цены и похожие товары
 regmarkets.ru/listpreview/idata2/f7/d5/f7d5abdf150e16102349e7445abac411.jpg»>
regmarkets.ru/listpreview/idata2/f7/d5/f7d5abdf150e16102349e7445abac411.jpg»>529
688
ШИМ генератор (регулятор) 1Гц — 150кГц Тип: Электронный модуль, Размер: Длина 10.000 Ширина 10.000
В МАГАЗИНЕще цены и похожие товары
267
372
ШИМ регулятор скорости вращения двигателя Тип: Электронный модуль, Размер: Длина 17.000 Ширина
В МАГАЗИНЕще цены и похожие товары
180
450
Регулятор мощности ШИМ DC 1.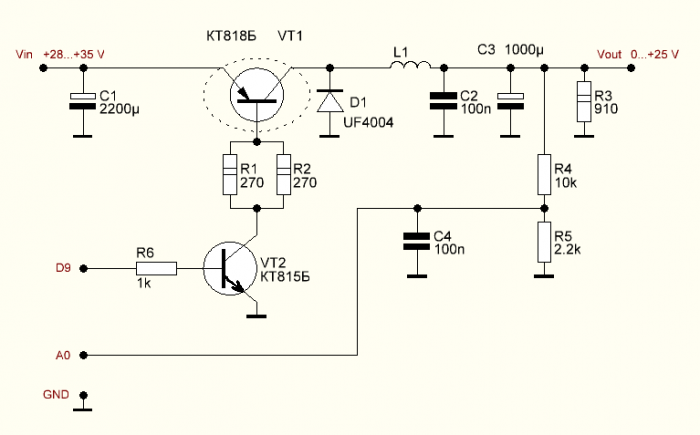 8-15V 2A с выносным потенциометром 1803BW Тип: Электронный модуль,
8-15V 2A с выносным потенциометром 1803BW Тип: Электронный модуль,
В МАГАЗИНЕще цены и похожие товары
740
1400
Регулятор оборотов /Реобас для вентиляторов питание ШИМ 6 пин Тип: Электронный модуль, Размер:
В МАГАЗИНЕще цены и похожие товары
 regmarkets.ru/listpreview/idata2/a6/49/a649cdc58a6c045780fd48c267b43e20.jpg»>
regmarkets.ru/listpreview/idata2/a6/49/a649cdc58a6c045780fd48c267b43e20.jpg»>3 360
3360
ШИМ регулятор мощности 12-80В / 30А в корпусе с радиатором и дисплеем MP301M Тип: Электронный
В МАГАЗИНЕще цены и похожие товары
200
550
ШИМ регулятор скорости двигателя, ток — 3А, напряжение от 6 до 28В Тип: Электронный модуль, Размер:
В МАГАЗИНЕще цены и похожие товары
 regmarkets.ru/listpreview/idata2/df/62/df62e42875b517cb95a98cd9ae7eeb19.jpg»>
regmarkets.ru/listpreview/idata2/df/62/df62e42875b517cb95a98cd9ae7eeb19.jpg»>382
600
ШИМ регулятор (генератор) 6-28В 3А Тип: Электронный модуль, Размер: Длина 15.000 Ширина 10.000
В МАГАЗИНЕще цены и похожие товары
990
990
Регулятор скорости мотора (ШИМ) PWM 15A: DC 6-90V, ток до 15A Тип: Электронный модуль, Размер:
В МАГАЗИНЕще цены и похожие товары
390
390
Регулятор ШИМ DC1.8-15V 2А с выключателем Тип: Электронный модуль, Размер: Длина 10.000 Ширина
В МАГАЗИНЕще цены и похожие товары
 jpg»>
jpg»>720
1100
Регулятор мощности оборотов двигателя и вентилятора ШИМ 20А, 9-60 В, напряжения 12 вольт Тип:
В МАГАЗИНЕще цены и похожие товары
602
602
ШИМ регулятор скорости коллекторного DC мотора 12V-40V 10A Тип: Электронный модуль, Размер: Длина
В МАГАЗИНЕще цены и похожие товары
 mds.yandex.net/get-marketpic/165839/pic59c4b8b1658eff462f244efb4c905a3e/6hq»>
mds.yandex.net/get-marketpic/165839/pic59c4b8b1658eff462f244efb4c905a3e/6hq»>690
690
Регулятор скорости двигателя (ШИМ 13кГц, ток — 10А, Uвход. от 12 до 40В управляемая мощность 0,01 400 ватт)
В МАГАЗИНЕще цены и похожие товары
 regmarkets.ru/listpreview/idata2/d1/c2/d1c2a815f3d3ef15ecebfbab1af03059.jpg»>
regmarkets.ru/listpreview/idata2/d1/c2/d1c2a815f3d3ef15ecebfbab1af03059.jpg»>990
1590
Ручной регулятор вентиляторов с термодатчиком (ШИМ регулятор, реобас для вентиляторов, хаб) PWM, 16А, 8х4pin
В МАГАЗИНЕще цены и похожие товары
340
340
ШИМ регулятор скорости двигателя, ток — 1А, напряжение от 3 до 35В Тип: Электронный модуль, Размер:
В МАГАЗИНЕще цены и похожие товары
ШИМ—регулятор скорости двигателя, V=12-40В, I=10А
В МАГАЗИНЕще цены и похожие товары
 mds.yandex.net/get-mpic/6417556/img_id7461253501523843154.jpeg/6hq»>
mds.yandex.net/get-mpic/6417556/img_id7461253501523843154.jpeg/6hq»>690
1500
Усиленный ручной регулятор ШИМ контроллер для вентиляторов, хаб (PWM) 4pin Тип: Электронный модуль,
В МАГАЗИНЕще цены и похожие товары
 jpg»>
jpg»>400
900
Модуль питания понижающего преобразователя XL4016E1, ШИМ регулятор DC-DC понижающий XH-M401 Тип:
В МАГАЗИНЕще цены и похожие товары
ШИМ—регулятор 1203B, V=6-26В, I=3А
В МАГАЗИНЕще цены и похожие товары
ШИМ—регулятор HW-687, V=4.5-28В, I=5А
В МАГАЗИНЕще цены и похожие товары
 jpg»>
jpg»>3 150
4000
Регулятор автоматический (HiveOS / RaveOS support) ШИМ Хаб для кулеров/ autofan Тип: Панель
В МАГАЗИНЕще цены и похожие товары
331
500
ШИМ регулятор (генератор) 1.8-15В 2А Тип: Электронный модуль, Размер: Длина 20.000 Ширина 15.000
В МАГАЗИНЕще цены и похожие товары
 regmarkets.ru/listpreview/idata2/03/77/0377713d6eaf052da13b4811774df479.jpg»>
regmarkets.ru/listpreview/idata2/03/77/0377713d6eaf052da13b4811774df479.jpg»>352
600
ШИМ регулятор скорости двигателя, ток — 1А, напряжение от 3 до 35В Тип: Электронный модуль, Размер:
В МАГАЗИНЕще цены и похожие товары
3 540
3540
Цифровой ШИМ регулятор мощности 220В / 10кВт 45А (MK071M) Тип: Комплект для сборки, Размер: Длина
В МАГАЗИНЕще цены и похожие товары
 jpg»>
jpg»>653
1313
Ручной регулятор вентиляторов (ШИМ регулятор, реобас для вентиляторов, хаб) PWM, 16А, 8х4pin Тип:
В МАГАЗИНЕще цены и похожие товары
519
700
Реобас для мощных вентиляторов 8-канальный с выносным регулятором / регулятор оборотов контроллер скорости хаб шим
В МАГАЗИНЕще цены и похожие товары
ШИМ регулятор двигателя Тип: плата
ПОДРОБНЕЕЕще цены и похожие товары
 mds.yandex.net/get-marketpic/1581841/pic86bd569025fff2951178f13fa24aa302/6hq»>
mds.yandex.net/get-marketpic/1581841/pic86bd569025fff2951178f13fa24aa302/6hq»>Радиоконструктор ARDUINO драйвер шагового двигателя 5-35V 2A 25W 0-36mAупр L298N
ПОДРОБНЕЕЕще цены и похожие товары
ШИМ—регулятор вентилятора, регулятор скорости ветра, регулятор громкости воздуха, регулятор скорости вентилятора, регулятор скорости, охлаждающий
ПОДРОБНЕЕЕще цены и похожие товары
Регулятор Реверсивный ШИМ скорости двигателя
ПОДРОБНЕЕЕще цены и похожие товары
DIY Модуль RP099. ШИМ—регулятор DC моторов. 12…36 В (3 А) Тип: резистор
ПОДРОБНЕЕЕще цены и похожие товары
 mds.yandex.net/get-marketpic/1719204/pica52c48cfaba7bf67f00a9d69268ef698/6hq»>
mds.yandex.net/get-marketpic/1719204/pica52c48cfaba7bf67f00a9d69268ef698/6hq»>Цифровой регулятор напряжения XH-M401 XL4016E1, ШИМ Регулируемый понижающий преобразователь DC, модуль источника питания, понижающий модуль 4-40 в 8 А
ПОДРОБНЕЕЕще цены и похожие товары
Россия Модуль RP0129. Регулятор мощности и оборотов с ШИМ (PWM). DC 10…50 В (40 А) с реверсом Тип:
ПОДРОБНЕЕЕще цены и похожие товары
Радиоконструктор регулятор скорости двигателя С ШИМ 3A 6-28V 80W
ПОДРОБНЕЕЕще цены и похожие товары
Реобас для вентиляторов 225 Вт контроллер скорости Opendev для ШИМ кулеров 4 пин Bitokshop Тип:
ПОДРОБНЕЕЕще цены и похожие товары
 mds.yandex.net/get-marketpic/5965598/pic852613261085d6ea9bce68aec36e3ca0/6hq»>
mds.yandex.net/get-marketpic/5965598/pic852613261085d6ea9bce68aec36e3ca0/6hq»>Радиоконструктор ARDUINO шим-управляемый регулятор мощности 8000ВТ/220V КИТ MP248
ПОДРОБНЕЕЕще цены и похожие товары
 regmarkets.ru/listpreview/images3/bb/91/bb91b7fd2110d9e67b79d5a5887dd710.jpg»>
regmarkets.ru/listpreview/images3/bb/91/bb91b7fd2110d9e67b79d5a5887dd710.jpg»>120
179
2000 Вт, 50-220 В переменного тока, 25 А, тиристорный контроллер скорости двигателя, регулируемый ШИМ регулятор напряжения, модуль переключателя 4,8
ПОДРОБНЕЕЕще цены и похожие товары
Симисторный регулятор мощности 2000Вт 220В & Стабилизатор напряжения & регулятор Ардуино/Arduino Osbix
ПОДРОБНЕЕЕще цены и похожие товары
Регулятор оборотов вентиляторов на 8 шт,300 ватт,(реобас,хаб) майнинг ферма ! шим для кулеров, Delta Electronics
ПОДРОБНЕЕЕще цены и похожие товары
 yandex.net/get-mpic/5323566/img_id2881449985222342751.jpeg/6hq»>
yandex.net/get-mpic/5323566/img_id2881449985222342751.jpeg/6hq»>Реобас для мощных вентиляторов 8-канальный с выносным регулятором Молекс 4 пин / регулятор оборотов / контроллер скорости / хаб / шим
ПОДРОБНЕЕЕще цены и похожие товары
ШИМ регулятор напряжения DC 10-40в 5A Тип: плата
ПОДРОБНЕЕЕще цены и похожие товары
 mds.yandex.net/get-marketpic/1596340/picb2b39386d99bc6e83f58901a5e92fe67/6hq»>
mds.yandex.net/get-marketpic/1596340/picb2b39386d99bc6e83f58901a5e92fe67/6hq»>Регулятор оборотов двигателя ШИМ 6-28В 3A
ПОДРОБНЕЕЕще цены и похожие товары
ARDUINO регулятор скорости DC двигателя
ПОДРОБНЕЕЕще цены и похожие товары
Модуль регулятор оборотов, ШИМ 90Вт, 4,5В-35В, контроллер скорости двигателя, регулируемое управление,регулятор мощности
ПОДРОБНЕЕЕще цены и похожие товары
EM-722, ШИМ—регулятор скорости вращения DC двигателя, 6-90В 1000 Вт
ПОДРОБНЕЕЕще цены и похожие товары
 mds.yandex.net/get-marketpic/1339901/pic06f06396503a63c68ff1e1601d41a1f8/6hq»>
mds.yandex.net/get-marketpic/1339901/pic06f06396503a63c68ff1e1601d41a1f8/6hq»>Регулятор мощности ШИМ 1203BK
ПОДРОБНЕЕЕще цены и похожие товары
Регуляторы мощности МастерКит Цифровой ШИМ регулятор мощности 10 кВт (220В, 45А)
ПОДРОБНЕЕЕще цены и похожие товары
ШИМ DC регулятор скорости 9В-60В 20A в корпусе
ПОДРОБНЕЕЕще цены и похожие товары
 regmarkets.ru/listpreview/images3/6a/ec/6aec5f8f8d4866c1ecb51d7c16f4710f.jpg»>
regmarkets.ru/listpreview/images3/6a/ec/6aec5f8f8d4866c1ecb51d7c16f4710f.jpg»>Регулятор оборотов двигателя ШИМ 1.8 — 12В 2А
ПОДРОБНЕЕЕще цены и похожие товары
 jpeg/6hq»>
jpeg/6hq»>Регулятор оборотов Tornadotool ШИМ-10
В МАГАЗИНЕще цены и похожие товары
Регулятор оборотов Tornadotool ШИМ-30
В МАГАЗИНЕще цены и похожие товары
2 страница из 6
ШИМ-регулятор. Широтно-импульсная модуляция. Схема :: SYL.ru
Из зелёных томатов готовим вкусную заготовку на зиму
Эксперементируйте с коркой: как приготовить идеальный чизкейк без запекания
Медленные движения щеточкой: делаем ресницы более объемными без наращивания
Тенденции причесок и окрашивания на осень 2022: доминирующие тренды сезона
Связываем и обрезаем: как готовить малину к зимовке
Попробуйте дизайн с ореолом: какие кольца выбрать для коротких пальцев
Белые джинсы и свитер в полоску: лучшие осенние наряды для полных женщин
Многолетняя клумба: почему ее лучше делать осенью и какие растения высаживать
«Ликси» — стрижка, которая подходит не только молодым: 10 идей для женщин 60+
Мини-сад в оцинкованной посуде: как создать и какие растения выбрать
Автор Человек
При работе с множеством различных технологий часто стоит вопрос: как управлять мощностью, которая доступна? Что делать, если её необходимо понизить или повысить? Ответом на эти вопросы служит ШИМ-регулятор. Что он собой представляет? Где применяется? И как самому собрать такой прибор?
Что он собой представляет? Где применяется? И как самому собрать такой прибор?
Что такое широтно-импульсная модуляция?
Без выяснения значения этого термина продолжать не имеет смысла. Итак, широтно-импульсная модуляция — это процесс управления мощностью, которая подводится к нагрузке, осуществляемая путём видоизменения скважности импульсов, которая делается при постоянной частоте. Существует несколько типов широтно-импульсной модуляции:
1. Аналоговый.
2. Цифровой.
3. Двоичный (двухуровневый).
4. Троичный (трехуровневый).
Что такое ШИМ-регулятор?
Теперь, когда мы знаем, что такое широтно-импульсная модуляция, можно поговорить и о главной теме статьи. Используется ШИМ-регулятор для того, чтобы регулировать напряжение питания и для недопущения мощных инерционных нагрузок в авто- и мототехнике. Это может звучать слишком сложно и лучше всего пояснить на примере. Допустим, необходимо сделать, чтобы лампы освещения салона меняли свою яркость не сразу, а постепенно. Это же относится к габаритным огням, автомобильным фарам или вентиляторам. Воплотить такое желание можно путём установки транзисторного регулятора напряжения (параметрический или компенсационный). Но при большом токе на нём будет выделяться чрезвычайно большая мощность и потребуется установка дополнительных больших радиаторов или дополнение в виде системы принудительного охлаждения с использованием маленького вентилятора, снятого с компьютерного устройства. Как видите, данный путь влечёт за собой много последствий, которые необходимо будет преодолеть.
Это же относится к габаритным огням, автомобильным фарам или вентиляторам. Воплотить такое желание можно путём установки транзисторного регулятора напряжения (параметрический или компенсационный). Но при большом токе на нём будет выделяться чрезвычайно большая мощность и потребуется установка дополнительных больших радиаторов или дополнение в виде системы принудительного охлаждения с использованием маленького вентилятора, снятого с компьютерного устройства. Как видите, данный путь влечёт за собой много последствий, которые необходимо будет преодолеть.
Настоящим спасением из данной ситуации стал ШИМ-регулятор, который работает на мощных полевых силовых транзисторах. Они могут коммутировать большие токи (которые достигают 160 Ампер) при напряжении всего в 12-15В на затворе. Следует отметить, что сопротивление у открытого транзистора довольное мало, и благодаря этому можно заметно снизить уровень рассеиваемой мощности. Чтобы создать свой собственный ШИМ-регулятор, понадобится схема управления, которая сможет обеспечить разность напряжения между истоком и затвором в границах 12-15В.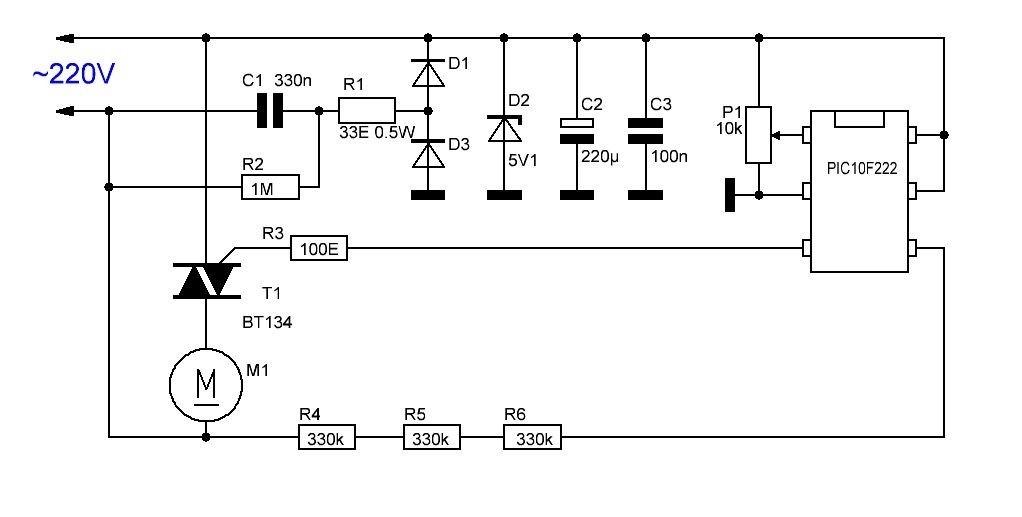 Если этого не получится достичь, то сопротивление канала будет сильно увеличиваться и значительно возрастёт рассеиваемая мощность. А это, в свою очередь, может привести к тому, что транзистор перегреется и выйдет из строя.
Если этого не получится достичь, то сопротивление канала будет сильно увеличиваться и значительно возрастёт рассеиваемая мощность. А это, в свою очередь, может привести к тому, что транзистор перегреется и выйдет из строя.
Выпускается целый ряд микросхем для ШИМ-регуляторов, которые смогут выдержать повышение входного напряжения до уровня 25-30В, при том, что питание будет всего 7-14В. Это позволит включать выходной транзистор в схеме вместе с общим стоком. Это, в свою очередь, необходимо для подключения нагрузки с общим минусом. В качестве примеров можно привести такие образцы: L9610, L9611, U6080B … U6084B. Большинство нагрузок не потребляет ток больше 10 ампер, поэтому они не могут вызвать просадку напряжения. И как результат – использовать можно и простые схемы без доработки в виде дополнительного узла, который будет повышать напряжение. И именно такие образцы ШИМ-регуляторов и будут рассмотрены в статье. Они могут быть построены на основе несимметрического или ждущего мультивибратора.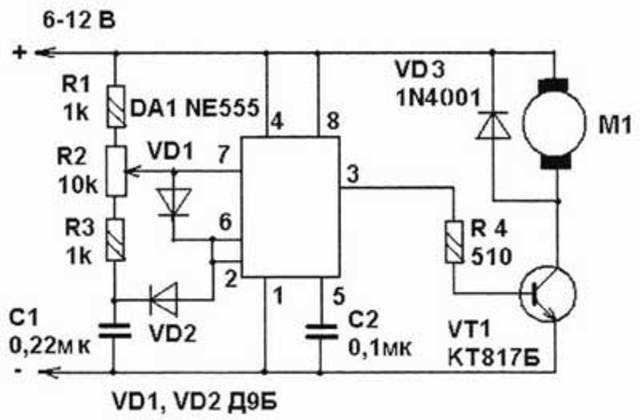 Стоит поговорить про ШИМ-регулятор оборотов двигателя. Об этом далее.
Стоит поговорить про ШИМ-регулятор оборотов двигателя. Об этом далее.
Схема №1
Эта схема ШИМ-регулятора собиралась на инверторах КМОП-микросхемы. Она является генератором прямоугольных импульсов, который действует на 2-х логических элементах. Благодаря диодам здесь отдельно изменяется постоянная времени разряда и заряда частотозадающего конденсатора. Это позволяет менять скважность, которую имеют выходные импульсы, и как результат – значение эффективного напряжения, которое есть на нагрузке. В данной схеме возможно использование любых инвертирующих КМОП-элементов, а также ИЛИ-НЕ и И. В качестве примеров подойдут К176ПУ2, К561ЛН1, К561ЛА7, К561ЛЕ5. Можно использовать и другие виды, но перед этим придётся хорошо подумать о том, как правильно сгруппировать их входы, чтобы они могли выполнять возложенный функционал. Преимущества схемы – доступность и простота элементов. Недостатки – сложность (практически невозможность) доработки и несовершенство относительно изменения диапазона выходного напряжения.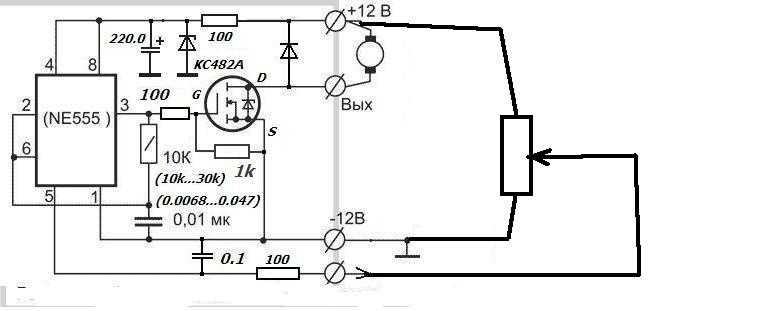
Схема №2
Обладает лучшими характеристиками, нежели первый образец, но сложнее в выполнении. Может регулировать эффективное напряжение на нагрузке в диапазоне 0-12В, до которого изменяется с начального значения 8-12В. Максимальный ток зависит от типа полевого транзистора и может достигать значительных значений. Учитывая, что выходное напряжение является пропорциональным входному управляющему, данную схему можно использовать как часть системы регулирования (для поддержки уровня температуры).
Причины распространения
Чем привлекает автолюбителей ШИМ-регулятор? Следует отметить стремление к увеличению КПД, когда проводится построение вторичных источников питания для электронной аппаратуры. Благодаря данному свойству можно данную технологию найти также при изготовлении компьютерных мониторов, дисплеев в телефонах, ноутбуках, планшетах и подобной техники, а не только в автомобилях. Также следует отметить значительную дешевизну, которой отличается данная технология при своём использовании.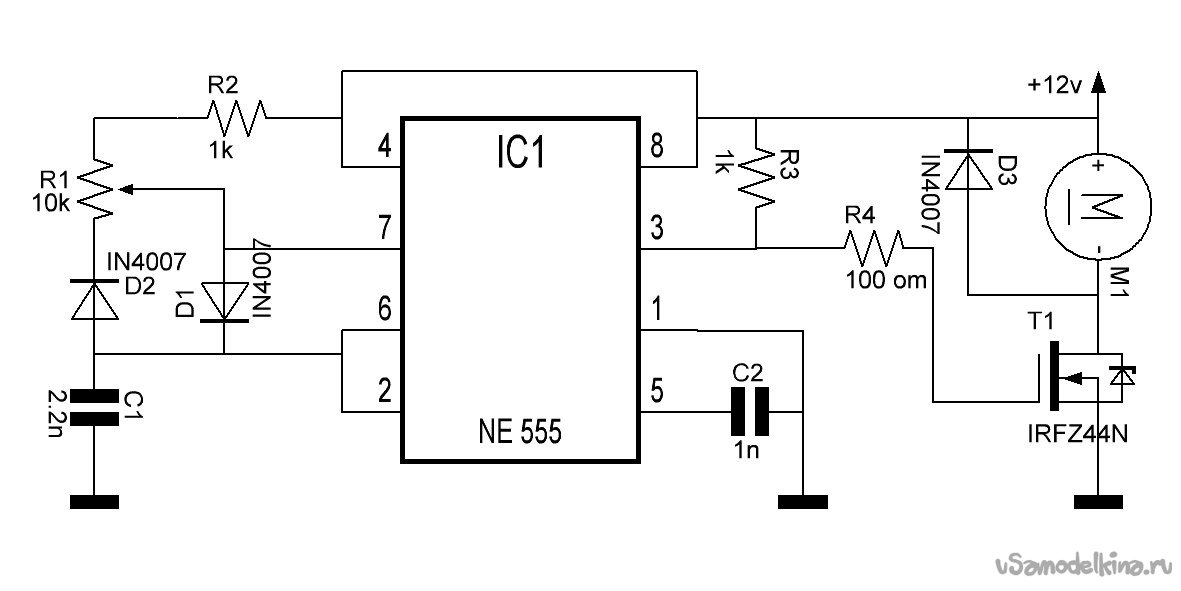 Также, если решите не покупать, а собирать ШИМ-регулятор собственноручно, то можно сэкономить деньги при усовершенствовании своего собственного автомобиля.
Также, если решите не покупать, а собирать ШИМ-регулятор собственноручно, то можно сэкономить деньги при усовершенствовании своего собственного автомобиля.
Заключение
Что ж, вы теперь знаете, что собой представляет ШИМ-регулятор мощности, как он работает, и даже можете сами собрать подобные устройства. Поэтому, если есть желание поэкспериментировать с возможностями своего автомобиля, можно сказать по этому поводу только одно – делайте. Причем можете не просто воспользоваться представленными здесь схемами, но и существенно доработать их при наличии соответствующих знаний и опыта. Но даже если всё не получится с первого раза, то вы сможете получить очень ценную вещь – опыт. Кто знает, где он может в следующий раз пригодиться и насколько важным будет его наличие.
Похожие статьи
- ШИМ-контроллер: схема, принцип работы, управление
- Регулятор напряжения: описание, принцип работы, назначение
- Микросхема 555: описание и практическое применение
- IGBT-транзистор: характеристики, принцип действия, применение
- Тиристорный регулятор напряжения для трансформатора
- ПИД-регулятор: описание, состав, настройка
- Водородные генераторы для автомобиля своими руками: чертежи, схемы и руководство
Также читайте
Мощный шим регулятор для лабораторного блока питания
Схема регулятора оборотов двигателя постоянного тока работает на принципах широтно-импульсной модуляции и применяется для изменения оборотов двигателя постоянного тока на 12 вольт. Регулирование частоты вращения вала двигателя при помощи широтно-импульсной модуляции дает больший КПД, чем при применение простого изменения постоянного напряжения подаваемого на двигатель, хотя эти схемы мы тоже рассмотрим
Регулирование частоты вращения вала двигателя при помощи широтно-импульсной модуляции дает больший КПД, чем при применение простого изменения постоянного напряжения подаваемого на двигатель, хотя эти схемы мы тоже рассмотрим
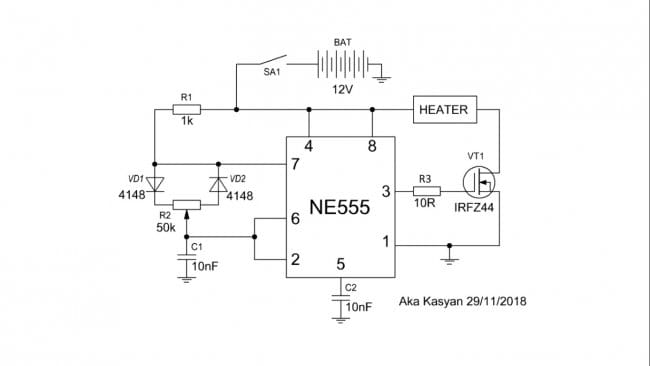
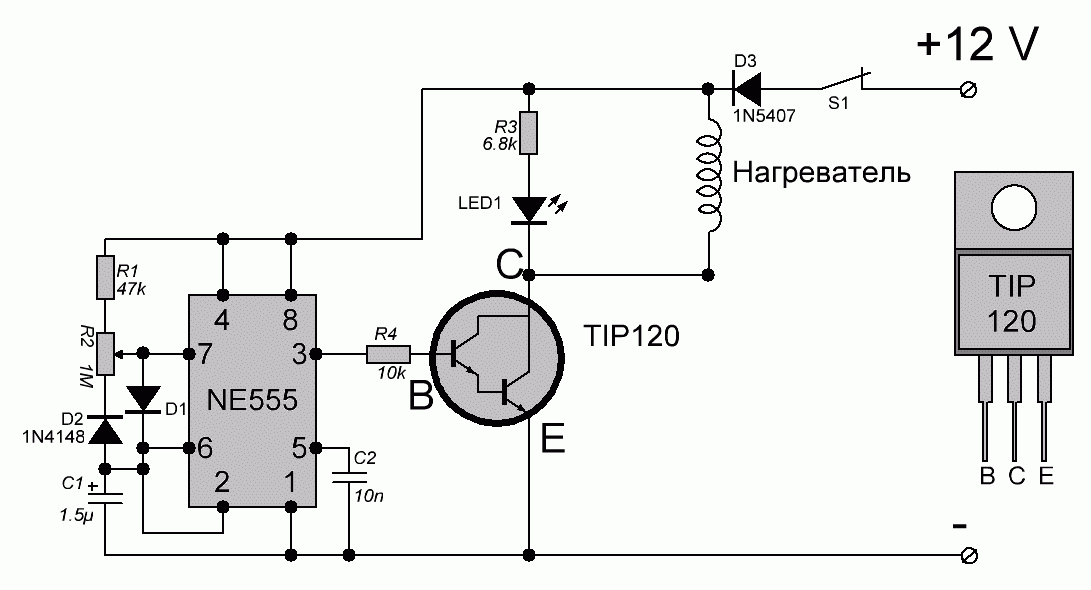
Двигатель подключен в цепь к полевому транзистору который управляется широтно-импульсной модуляцией осуществляемой на микросхеме таймере NE555, поэтому и схема получилась такой простой.
ШИМ регулятор реализован с помощью обычного генератора импульсов на нестабильном мультивибраторе, генерирующий импульсы с частотой следования 50 Гц и построенного на популярном таймере NE555. Сигналы поступающие с мультивибратора создают поле смещения на затворе полевого транзистора. Длительность положительного импульса настраивается при помощи переменного сопротивления R2. Чем выше длительность положительного импульса поступающего на затвор полевого транзистора, тем большая мощность
подается на электродвигатель постоянного тока. И на оборот чем меньше длительность импульса, тем слабее вращается электродвигатель.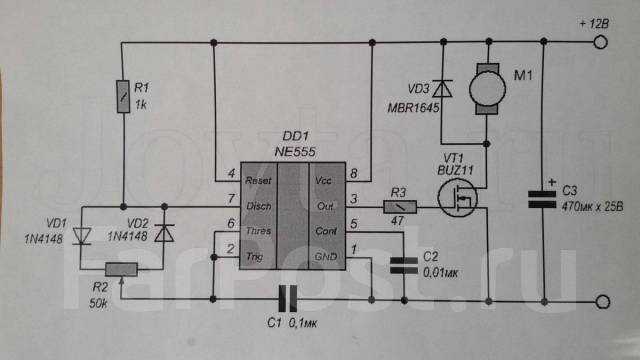 Эта схема прекрасно работает от аккумуляторной батареи на 12 вольт.
Эта схема прекрасно работает от аккумуляторной батареи на 12 вольт.
Скорость 6 вольтового моторчика можно регулируется в пределах 5-95%
Регулировка оборотов в этой схеме достигается подачей на электромотор импульсов напряжения, различной длительности. Для этих целей используются ШИМ (широтно-импульсные модуляторы). В данном случае широтно-импульсное регулирование обеспечивается микроконтроллер PIC. Для управления скоростью вращения двигателя используются две кнопки SB1 и SB2, «Больше» и «Меньше». Изменять скорость вращенияможно только при нажатом тумблере «Пуск». Длительность импульса при этом изменяется, в процентном отношении к периоду, от 30 — 100%.
В качестве стабилизатора напряжения микроконтроллера PIC16F628A, используется трехвыводной стабилизатор КР1158ЕН5В, имеющий низкое падение напряжение «вход-выход», всего около 0,6В. Максимальное входное напряжение — 30В. Все это позволяет применять двигатели с напряжением от 6В до 27В. В роли силового ключа используется составной транзистор КТ829А который желательно установить на радиатор.![]()
Устройство собрано на печатной плате размерами 61 х 52мм. Скачать рисунок печатной платы и файл прошивки можно по ссылке выше. (Смотри в архиве папку 027-el )
Для регулировки частоты вращения маломощных электродвигателей коллекторного типа обычно применяют резистор, который включают последовательно с двигателем. Но такой способ включения обеспечивает очень низкий КПД, а самое главное не позволяет осуществлять плавную регулировку оборотов (найти переменный резистор достаточной мощности на несколько десятков Ом совсем не просто). А самый главный недостаток такого способа, это то, что иногда происходит остановка ротора при снижении напряжения питания.
ШИМ-регуляторы , речь о которых пойдет в этой статье, позволяют осуществлять плавную регулировку оборотов без перечисленных выше недостатков. Помимо этого ШИМ-регуляторы так же можно применять и для регулировки яркости ламп накаливания.
На рис.1 приведена схема одного из таких ШИМ-регуляторов
. Полевой транзистор VT1 является генератором пилообразного напряжения (с частотой повторения 150 Гц), а операционный усилитель на микросхеме DA1 работает как компаратор, формирующий ШИМ-сигнал на базе транзистора VT2. Частота вращения регулируется переменным резистором R5, изменяющим ширину импульсов. Благодаря тому, что их амплитуда равна напряжению питания, электродвигатель не будет «тормозить», а кроме этого можно добиться более медленного вращения, чем в обычном режиме.
Полевой транзистор VT1 является генератором пилообразного напряжения (с частотой повторения 150 Гц), а операционный усилитель на микросхеме DA1 работает как компаратор, формирующий ШИМ-сигнал на базе транзистора VT2. Частота вращения регулируется переменным резистором R5, изменяющим ширину импульсов. Благодаря тому, что их амплитуда равна напряжению питания, электродвигатель не будет «тормозить», а кроме этого можно добиться более медленного вращения, чем в обычном режиме.
Схема ШИМ регуляторов на рис.2 аналогична предыдущей, но задающий генератор здесь выполнен на операционном усилителе (ОУ) DA1. Этот ОУ функционирует в роли генератора импульсов напряжения треугольной формы с частотой повторения 500 Гц. Переменный резистор R7 позволяет осуществлять плавную регулировку вращения.
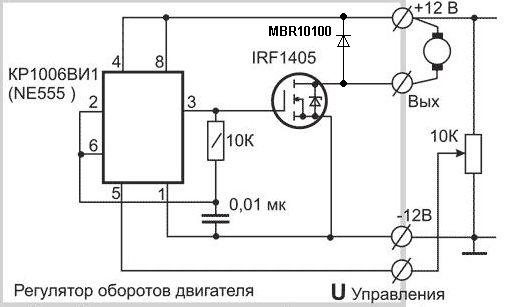
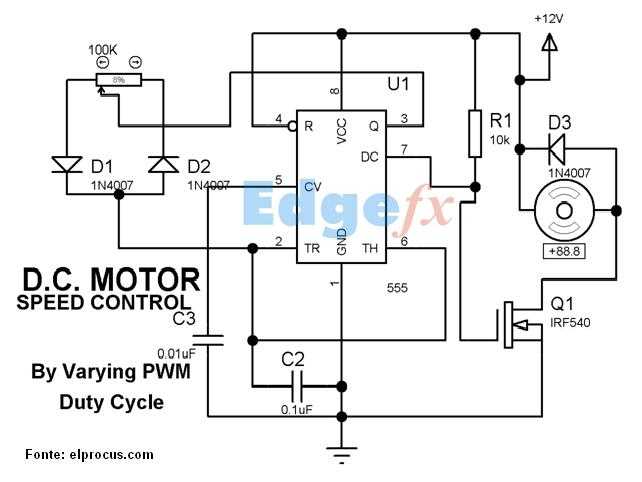
На рис.3. представлена весьма интересная схема регулятора. Этот ШИМ регулятор
выполнен на интегральном таймере NE555
. Задающий генератор имеет частоту повторения 500 Гц.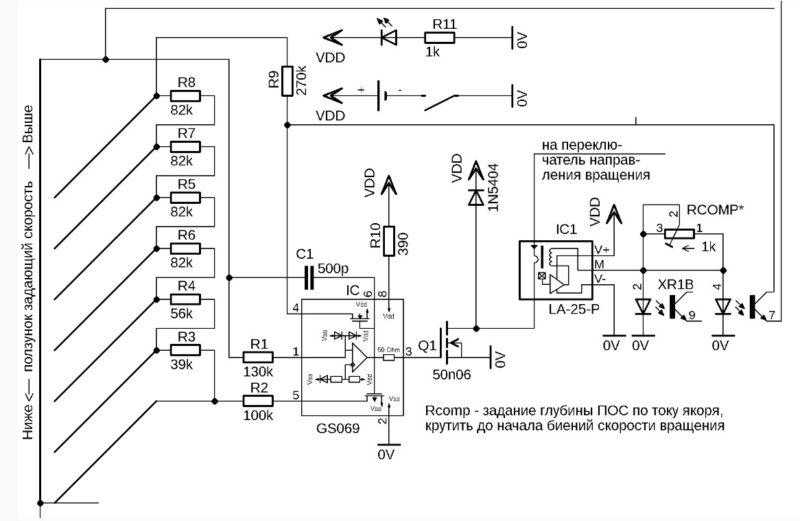 Длительность импульсов, а, следовательно, и частоту вращения ротора электродвигателя можно регулировать в диапазоне от 2 до 98 % периода повторения. Выход генератора ШИМ регулятора на таймере NE555
подключен к усилителю тока, выполненному на транзисторе VT1 и собственно управляет электродвигателем М1.
Длительность импульсов, а, следовательно, и частоту вращения ротора электродвигателя можно регулировать в диапазоне от 2 до 98 % периода повторения. Выход генератора ШИМ регулятора на таймере NE555
подключен к усилителю тока, выполненному на транзисторе VT1 и собственно управляет электродвигателем М1.
Главным недостатком схем рассмотренных выше является отсутствие элементов стабилизации частоты вращения вала при изменении нагрузки. А вот следующая схема, показанная на рис.4., поможет решить эту проблему.
Данный ШИМ регулятор как и большинство аналогичных устройств, имеет задающий генератор импульсов напряжения треугольной формы (частота повторения 2 кГц), выполненный на DA1.1.DA1.2, компаратор на DA1.3, электронный ключ на транзисторе VT1, а также регулятор скважности импульсов, а по сути частоты вращения электродвигателя — R6. Особенностью схемы является наличие положительной обратной связи посредством резисторов R12, R11, диода VD1,конденсатора C2, и DA1.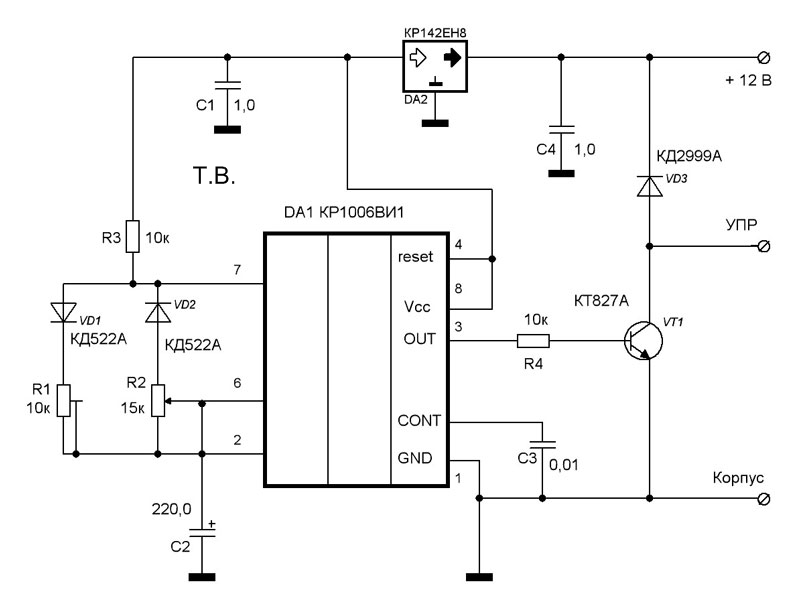 4, которая обеспечивает постоянную частоты вращения вала электродвигателя при изменении нагрузки. При подключении ШИМ регулятора
к конкретному электродвигателю при помощи резистора R12 производится регулировка глубины ПОС, при которой не возникает автоколебаний частоты вращения при увеличении или уменьшении нагрузки на вал двигателя.
4, которая обеспечивает постоянную частоты вращения вала электродвигателя при изменении нагрузки. При подключении ШИМ регулятора
к конкретному электродвигателю при помощи резистора R12 производится регулировка глубины ПОС, при которой не возникает автоколебаний частоты вращения при увеличении или уменьшении нагрузки на вал двигателя.
Элементная база. В приведенных в статье схемах можно использовать следующие аналоги деталей: транзистор КТ117А можно заменить на КТ117Б-Г или как вариант на 2N2646; КТ817Б — КТ815, КТ805; микросхему К140УД7 на К140УД6, или КР544УД1, ТL071, TL081; таймер NE555 на С555, или КР1006ВИ1; микросхему TL074 на TL064, или TL084, LM324. Если необходимо подключить к ШИМ-регулятору более мощную нагрузку ключевой транзистор КТ817 необходимо заменить более мощным полевым транзистором, как вариант, IRF3905 или подобным. Указанный транзистор способен пропускать токи до 50А.
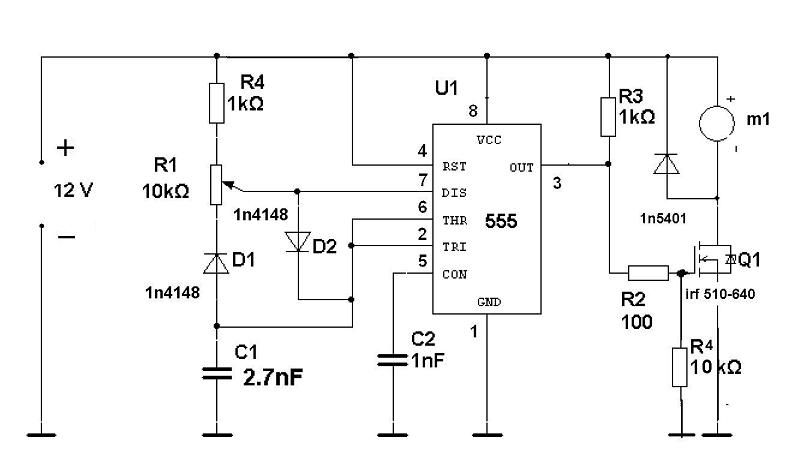
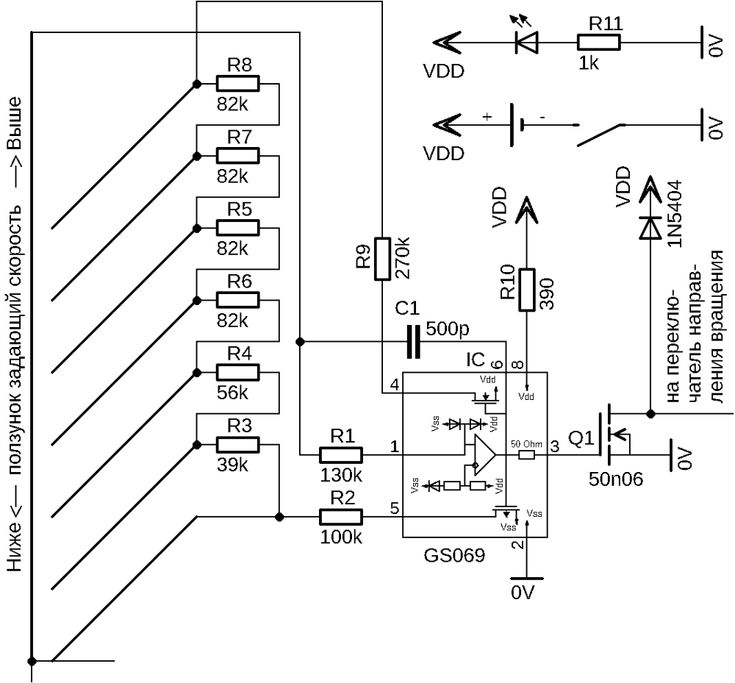
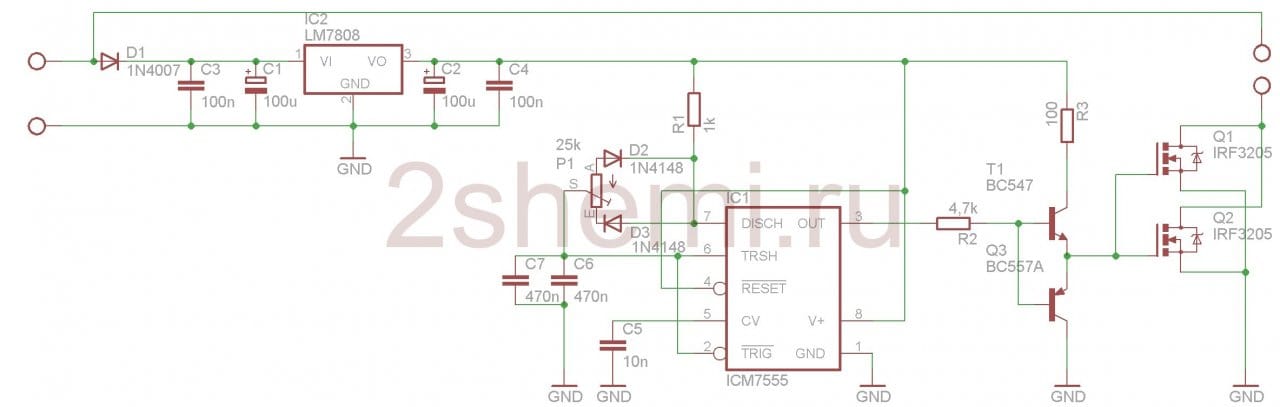
Эта самодельная схема может быть использована в качестве регулятора скорости для двигателя постоянного тока 12 В с номинальным током до 5 А или как диммер для 12 В галогенных и светодиодных ламп мощностью до 50 Вт.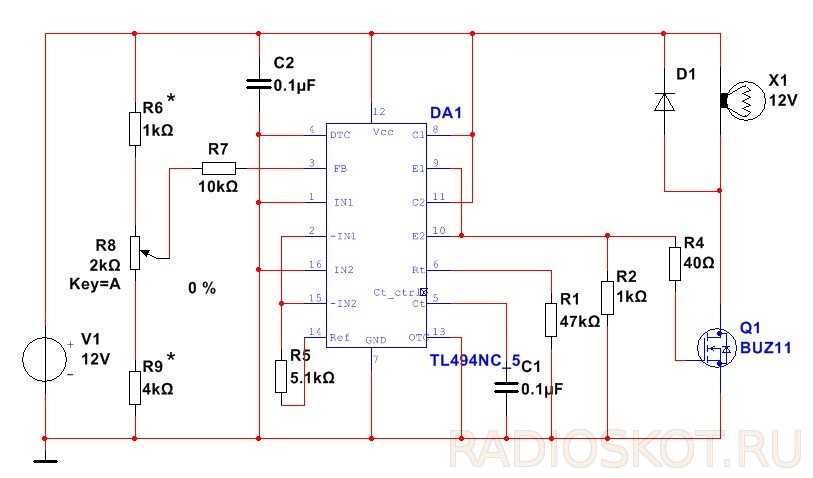 Управление идёт с помощью широтно-импульсной модуляции (ШИМ) при частоте следования импульсов около 200 Гц. Естественно частоту можно при необходимости изменить, подобрав по максимальной стабильности и КПД.
Управление идёт с помощью широтно-импульсной модуляции (ШИМ) при частоте следования импульсов около 200 Гц. Естественно частоту можно при необходимости изменить, подобрав по максимальной стабильности и КПД.
Большинство подобных конструкций собирается по гораздо . Здесь же представляем более усовершенствованный вариант, который использует таймер 7555, драйвер на биполярных транзисторах и мощный полевой MOSFET. Такая схематика обеспечивает улучшенное регулирование скорости и работает в широком диапазоне нагрузки. Это действительно очень эффективная схема и стоимость её деталей при покупке для самостоятельной сборки довольно низкая.
В схеме используется Таймер 7555 для создания переменной ширины импульсов около 200 Гц. Он управляет транзистором Q3 (через транзисторы Q1 — Q2), который контролирует скорость электро двигателя или ламп освещения.
Есть много применений для этой схемы, которые будут питаться от 12 В: электродвигатели, вентиляторы или лампы.
 Использовать её можно в автомобилях, лодках и электротранспортных средствах, в моделях железных дорог и так далее.
Использовать её можно в автомобилях, лодках и электротранспортных средствах, в моделях железных дорог и так далее.Светодиодные лампы на 12 В, например LED ленты, тоже можно смело сюда подключать. Все знают, что светодиодные лампы гораздо более эффективны, чем галогенные или накаливания, они прослужит намного дольше. А если надо — питайте ШИМ-контроллер от 24 и более вольт, так как сама микросхема с буферным каскадом имеют стабилизатор питания.
Управление скоростью двигателя постоянного тока на основе ШИМ с использованием микроконтроллера
В этом проекте я покажу вам, как генерировать сигнал ШИМ с помощью микроконтроллера 8051, а также управление скоростью двигателя постоянного тока на основе ШИМ с использованием микроконтроллера.
Краткое описание
Введение
Важно контролировать скорость двигателя постоянного тока во многих приложениях, где важны точность и защита. Здесь мы будем использовать технику под названием ШИМ (широтно-импульсная модуляция) для управления скоростью двигателя постоянного тока.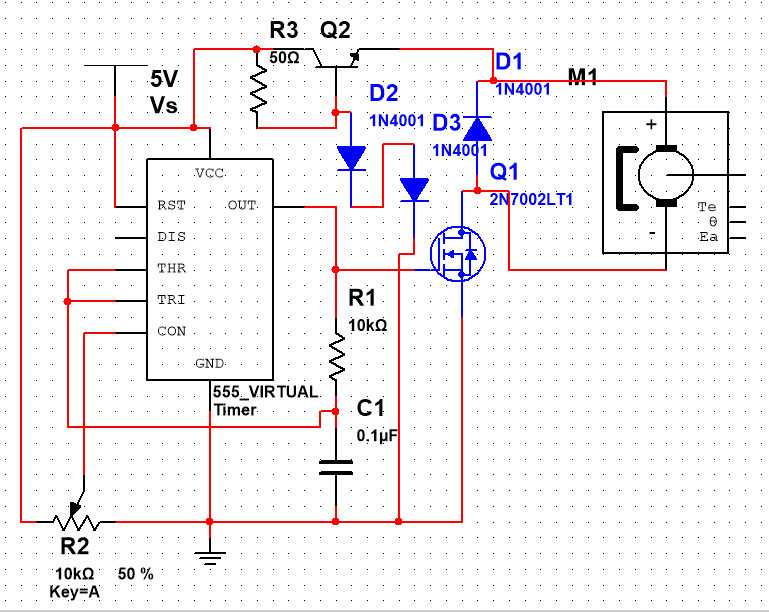
Мы можем добиться управления скоростью двигателя постоянного тока с помощью механических или электрических методов, но для их реализации требуется оборудование большого размера, но система на основе микроконтроллера обеспечивает простой способ управления скоростью двигателя постоянного тока.
Ранее мы уже видели как управлять скоростью двигателя постоянного тока с помощью ШИМ без микроконтроллера . Здесь мы проводим тот же эксперимент с использованием микроконтроллера.
Для этой цели здесь мы будем использовать контроллер 8051 для создания волны ШИМ. Изменяя ширину этой волны ШИМ, мы можем контролировать скорость двигателя постоянного тока. В микроконтроллере 8051 таймеры используются для генерации волны ШИМ.
В этой статье мы увидим, как генерировать ШИМ-сигнал с помощью таймеров в микроконтроллере 8051, а также как управлять скоростью двигателя постоянного тока с помощью этого ШИМ-сигнала.
Управление скоростью двигателя постоянного тока на основе ШИМ с использованием принципа схемы микроконтроллера
Сердцем этого проекта является микроконтроллер 8051. Если вы работали с любым вариантом микроконтроллера 8051, вы, возможно, помните, что 8051 не имеет специальной схемы ШИМ для включения режима ШИМ. Таким образом, чтобы генерировать сигнал ШИМ, мы должны использовать таймеры и включать и выключать контакты ввода-вывода с помощью таймеров.
Если вы работали с любым вариантом микроконтроллера 8051, вы, возможно, помните, что 8051 не имеет специальной схемы ШИМ для включения режима ШИМ. Таким образом, чтобы генерировать сигнал ШИМ, мы должны использовать таймеры и включать и выключать контакты ввода-вывода с помощью таймеров.
В этом проекте я буду использовать Timer0 в микроконтроллере 8051 вместе с Timer Interrupt для создания ШИМ-сигнала.
Также прочитайте соответствующую публикацию — Как работает схема драйвера шагового двигателя с использованием микроконтроллера 8051?
Как сгенерировать ШИМ в микроконтроллере 8051?
Большинство современных микроконтроллеров, таких как AVR (например, Arduino), ARM, PIC и т. д., имеют специальное аппаратное обеспечение ШИМ и контакты для мгновенной активации режима ШИМ. Однако в микроконтроллерах 8051 такой возможности нет. Итак, как генерировать ШИМ в микроконтроллере 8051?
Для этого мы должны использовать таймеры и прерывания в микроконтроллере 8051.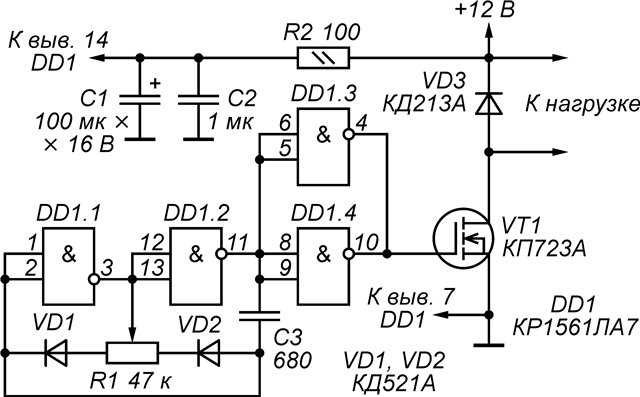 Timer0 8051 настроен на Mode0. Тщательно регулируя уровни High и Low, мы можем поддерживать постоянный период сигнала.
Timer0 8051 настроен на Mode0. Тщательно регулируя уровни High и Low, мы можем поддерживать постоянный период сигнала.
Принципиальная схема управления скоростью двигателя постоянного тока на основе ШИМ с использованием микроконтроллера
Компоненты схемы
- 8051 Микроконтроллер
- Кристалл 11,0592 МГц
- Конденсаторы – 33 пФ x 2, 10 мкФ
- Резисторы – 1 кОм x 4, 10 кОм x 2
- Двигатель постоянного тока 12 В
- Драйвер двигателя L298N
- Кнопки x 5
- Комплект нагрузочных резисторов 1 кОм x 8
- Последовательный кабель
- Аккумулятор 12 В или адаптер
- Соединительные провода
Управление скоростью двигателя постоянного тока на основе ШИМ с использованием схемы микроконтроллера
Схема состоит из одного микроконтроллера 8051 (и поддерживающих его схем, связанных с генератором и сбросом), модуля драйвера двигателя L298N, двигателя постоянного тока и нескольких кнопок.
Двигатель постоянного тока 12 В подключен к модулю драйвера двигателя L298N через его контакты OUT1 и OUT2. Контакты IN1 и IN2 драйвера двигателя подключены к +5V (VCC) и GND. Контакт EN1 драйвера двигателя подключен к контакту Port0 P0.0.
Четыре кнопки подключены к контактам P0.4, P0.5, P0.6 и P0.7 порта 0.
Как правило, мы можем подключить коммутаторы к микроконтроллеру в двух конфигурациях; одна конфигурация Pull-up, а другая конфигурация pull-down.
Конфигурация подтягивания: В конфигурации подтягивания вывод микроконтроллера переводится в ВЫСОКИЙ уровень на LOGIC 1, а кнопка подключается к GND. Когда кнопка нажата, вывод микроконтроллера получает LOGIC 0
Конфигурация понижения: В конфигурации понижения вывод микроконтроллера переводится в состояние LOGIC 0, а кнопка подключается к VCC. Когда кнопка нажата, вывод микроконтроллера получает LOGIC 1.
В нашей схеме мы используем конфигурацию подтягивания. Итак, нам нужно проверить наличие логического 0, чтобы узнать, нажата ли кнопка или нет.
Код
Ниже приведен код проекта.
Как управлять схемой?
- Подключите аккумулятор 12 В или адаптер к макетной плате.
- Включите питание.
- Записать шестнадцатеричный файл на контроллер 8051 с помощью программатора.
- Выполните необходимые подключения в соответствии с принципиальной схемой.
- Теперь включите питание и нажмите переключатель 1. Вы можете наблюдать, как начинается вращение, но только при мощности 40%.
- Если вы нажмете переключатель 2, двигатель будет работать с чуть большей, чем половина скорости (рабочий цикл 60 %).
- При нажатии переключателя 3 двигатель будет вращаться на полной скорости (100% рабочий цикл).
- Чтобы остановить двигатель, нажмите переключатель 4.
Преимущества
- Используя этот метод ШИМ, мы можем экономить электроэнергию.
Применение
- Используется в промышленности для управления скоростью двигателей.
- Используется в торговых центрах.
- Мы можем использовать эту концепцию для управления интенсивностью света.
Управление скоростью двигателя постоянного тока с помощью широтно-импульсной модуляции, 555
Краткое описание
Введение
В этом проекте я покажу, как можно реализовать управление скоростью двигателя постоянного тока с помощью 555 и широтно-импульсной модуляции (ШИМ).
В повседневной жизни мы используем двигатели постоянного тока во многих системах. Например, вентиляторы ЦП, огнетушители, игрушечные машинки и т. д. — все это двигатели постоянного тока, которые работают от источника питания постоянного тока. В большинстве случаев нам придется регулировать скорость двигателей в соответствии с нашими требованиями.
Например, вентилятор ЦП должен работать на высокой скорости, когда ЦП выполняет тяжелые задачи, такие как игры или редактирование видео. Но для обычного использования, такого как редактирование документов, скорость вращения вентилятора можно уменьшить.
Хотя некоторые системы имеют систему автоматической регулировки скорости вращения вентилятора, не все системы обладают этой функцией. Таким образом, нам придется время от времени самостоятельно регулировать скорость двигателя постоянного тока.
Как реализовано управление скоростью двигателя постоянного тока?
Существует несколько способов ручной регулировки скорости двигателя постоянного тока. Самый простой способ добиться этого — использовать переменный резистор, т. е. мы можем регулировать скорость двигателя постоянного тока, используя последовательно с двигателем переменное сопротивление.
Но этот метод обычно не готовят по двум причинам. Первая причина – потеря энергии, т. е. резистор рассеивает избыточную энергию в виде тепла. Вторая причина заключается в том, что если мы хотим использовать какие-либо устройства, такие как микроконтроллеры или любое другое цифровое оборудование, для автоматизации управления скоростью нашего двигателя постоянного тока, то этот метод использовать нельзя.
Более эффективным способом является использование широтно-импульсной модуляции для управления скоростью нашего двигателя постоянного тока.
Также прочитайте соответствующую публикацию — Контроллер шагового двигателя с использованием микроконтроллера AT89C51
Принципиальная схема управления скоростью двигателя постоянного тока на основе ШИМ
Необходимые компоненты
- 555 ИС таймера
- Двигатель постоянного тока 12 В
- 1N5819 x 2
- 1N4007
- 100 нФ
- 100 пФ
- Резистор 10 кОм
- Потенциометр 100 кОм
- МОП-транзистор IRF540
- Мини-макет
- Источник питания 12 В
- Соединительные провода
Схема
Я не буду объяснять схему выводов микросхемы 555 и предполагаю, что вы уже с ней знакомы. Продолжая проектирование схемы, контакт 1 из 555 подключен к GND. Контакты 8 и 4 подключены к источнику питания +12 В.
Контакты 6 и 2 короткие, и между контактом 2 и GND подключен конденсатор емкостью 100 нФ. Контакт потенциометра потенциометра подключен к контакту 3 микросхемы 555. Два диода Шоттки (1N5819) подключены к двум другим контактам POT, как показано на принципиальной схеме.
Общая точка диодов подключена к контакту 2. Контакт 7 подключен к высокому уровню с помощью резистора 10 кОм. Клемма Gate MOSFET подключена к контакту 7 555. Двигатель подключен между питанием +12 В и стоком MOSFET, а исток MOSFET подключен к GND.
Диод PN-перехода подключается к клеммам двигателя для предотвращения обратной ЭДС.
ПРИМЕЧАНИЕ: Я не использовал диоды Шоттки, но заменил их простыми диодами 1N4007, так как частота ШИМ меньше (около 220 Гц).
Как работает управление скоростью цепи двигателя постоянного тока?
В этой схеме двигатель постоянного тока управляется интегральной схемой 555. IC 555 в этой схеме работает в нестабильном режиме, который создает непрерывные импульсы HIGH и LOW.
В этом режиме микросхема 555 может использоваться как широтно-импульсный модулятор с небольшими изменениями в схеме. Частота работы схемы обеспечивается пассивными параметрами подключенных к ней сопротивлений и конденсаторов.
Прочтите также следующее сообщение: Сигнализация уровня воды с использованием таймера 555
ПРИМЕЧАНИЕ:
- Одна из лучших особенностей этой схемы заключается в том, что вы можете заставить ее работать как нестабильный мультивибратор с небольшим аппаратным обеспечением и небольшими затратами, что может сэкономить как стоимость, связанную с ее созданием, так и пространство. на печатной плате (PCB).
- Если вам нужен сложный широтно-импульсный модулятор, который работает более точно и имеет больше возможностей настройки, то лучше использовать широтно-импульсный модулятор на основе микроконтроллера, чем тот, который мы используем сейчас.
- Однако схема или приложение, для которого мы используем широтно-импульсный модулятор, не столь чувствительны и, следовательно, не требуют такой высокой точности. В таком случае схема, которую мы используем с голой IC 555, лучше, поскольку она экономит наши денежные и космические ресурсы при построении схемы.
- Рабочий цикл цепи можно изменить, изменив значение потенциометра. Если мы увеличим рабочий цикл, скорость двигателя увеличится, а если мы уменьшим рабочий цикл, скорость двигателя уменьшится.
Вы заинтересованы в реализации этого проекта с использованием микроконтроллера? Тогда перейдите к сообщению — Как работает схема управления скоростью двигателя постоянного тока на основе ШИМ с использованием микроконтроллера ?
Микроконтроллер — точность ШИМ в зависимости от точности управления скоростью
спросил
Изменено 1 год, 5 месяцев назад
Просмотрено 362 раза
\$\начало группы\$
Для двигателя PMSM с инверторным управлением, если мы хотим реализовать высокую точность скорости в установившемся режиме, скажем, 0,2%, т. е. +/- 2 об/мин при 1000 об/мин, должна ли точность ШИМ быть лучше, чем она? Или это больше о разрешении PWM?
Насколько я понимаю, разрешение ШИМ должно быть лучше, допустим 12-битное, и тогда разрешение не проблема. С другой стороны, на точность ШИМ влияют часы микроконтроллера, на которые влияет внешний кварц/генератор. Если точность ШИМ должна быть лучше, чем точность управления двигателем, то я должен быть очень осторожным при выборе компонентов.
[обновлено]
Другая проблема связана с измерением скорости двигателя. Я полагаю, что для такого более точного управления скоростью двигателя необходим энкодер, а поскольку доступны 12-битные и даже 15-битные инкрементные энкодеры, поэтому я думаю, что алгоритм определения скорости должен больше обеспечивать точность измеренной скорости, чем 0,2%. Любое предложение по алгоритму обработки кодировщика?
Нагрузка двигателя изменяется медленно, отклонение составляет примерно +/- 5 %.
[обновление-2]
Давайте не будем говорить о таких случаях, как маховики, где инерция огромна, чтобы помочь стабилизировать скорость. Я думаю, что подходящей аналогией будет лезвие блендера, приводимое в движение двигателем PMSM с энкодером, смешивающим небольшое количество фруктов.
скорость вращения ротора микроконтроллера pwm
\$\конечная группа\$
20
\$\начало группы\$
Давайте не будем говорить о таких случаях, как маховики, где инерция огромна, чтобы помочь стабилизировать скорость
Но мы есть. С типичными современными микроконтроллерами и их встроенными генераторами PWM, а также с типичными двигателями сам двигатель представляет собой маховик, не говоря уже о лопасти, которую вы на него надеваете. Рассмотрим этот двигатель, который разработан , чтобы иметь низкую инерцию (и абсурдно дорогой для разбивания фруктов на кусочки). Это двигатель без сердечника, что означает, что его инерция может быть в пять-двадцать раз меньше, чем у бесщеточного двигателя.
Он имеет механическую постоянную времени 4,87 мс. Это означает, что это абсурдно быстродействующий двигатель действует как фильтр нижних частот 1-го порядка с частотой 3 дБ 32 Гц.
Чтобы нагромождать абсурд на абсурд, предположим, что вы управляете двигателем PWM с супердешевым микропроцессором, таким как 8-битная часть Atmel, и что по какой-то причине вы решили использовать 8-битные таймеры. Таким образом, у вас есть эффективное разрешение ШИМ 1 из 128. Даже ATMega справится с обновлением ШИМ на частоте 10 кГц — так что предположим, что это так.
Теперь у вас есть разрешение 1:128, что намного хуже, чем 1:500 (0,2%), которое вы называете. Если вы просто сглаживаете ШИМ на частоте 625 Гц, вы можете увеличить эффективное разрешение в 16 раз, что значительно превышает необходимое вам значение 1:500. Еще лучше, внедрите в свое программное обеспечение простой сигма-дельта модулятор 1-го порядка, тогда вы увеличите эффективное разрешение ШИМ примерно на 300, или чуть более 15 бит. Вы могли бы подумать о реализации сигма-дельта еще более высокого порядка, но вы уже находитесь на смехотворном уровне разрешения по сравнению с тем, что вам нужно, так зачем туда идти?
\$\конечная группа\$
\$\начало группы\$
Точность сигнала ШИМ может быть намного лучше, чем вы думаете. Если вы действительно имеете в виду точность коэффициента заполнения , то она не зависит от небольших изменений тактовой частоты процессора. Коэффициент заполнения представляет собой отношение времени высокого импульса к периоду импульса, и оба они являются целыми кратными тактовой частоты процессора. Таким образом, фактическая тактовая частота отменяется.
Единственный способ, которым может пострадать точность, это если тактовая частота значительно изменится в течение каждого периода выхода ШИМ. Это, безусловно, возможно, но эффект, вероятно, намного меньше, чем абсолютная точность кристалла и изменение температуры.
Сказав все это, я не знаю, лучший ли это способ управления двигателем.
\$\конечная группа\$
2
\$\начало группы\$
Важно учитывать точность оптического энкодера. Оптический энкодер измеряет дискретные изменения углового положения, поэтому ваша ошибка положения составляет не более одного отсчета энкодера. Эта ошибка энкодера проявится при вычислении скорости, потому что вам нужно дифференцировать угловое положение (\$\theta\$) по отношению к времени дискретизации (\$T\$), чтобы получить угловую скорость (\$\omega\ $). Дифференциация выполняется численно с использованием текущего счетчика кодировщика \$\theta_{i}\$ и последнего выборочного счетчика кодировщика \$\theta_{i-1}\$.
\начало{уравнение} \ омега = \ гидроразрыва {\ theta_ {i} — \ theta_ {i-1}} {T} \end{equation}
Мы знаем, что наибольшая ошибка составляет 1 шаг энкодера. Это означает, что ошибка скорости может быть вычислена следующим образом:
\begin{equation} \omega_{ошибка} = \frac{\theta(1)}{T} \end{equation}
Таким образом, время между выборками энкодера и разрешение энкодера влияют на ошибку вашего измерения. Пример: 12-битный энкодер имеет 1024 периода на оборот (PPR). Это означает, что 4*1024= 4096 индивидуальных шагов. Это означает, что каждый шаг соответствует 0,0878 градусам. Теперь представьте, если бы вы производили выборку этого измерения каждые 0,01 секунды.
\begin{уравнение} \ omega_ {ошибка} = \ frac {\ theta (1)} {T} = \ frac {0,0878} {0,01} = 8,78 \ frac {градус {s} = 1,46 об / мин. \end{equation}
Таким образом, чем дольше вы сэмплируете кодировщик, тем лучшее разрешение вы получаете. Обычно я использую скользящее среднее значение для фильтрации числового результата (\$\omega\$), что уменьшает шум и обеспечивает немного большую стабильность для вашего контроллера.
Что касается ШИМ, я не могу комментировать, если вы не уточните, что вы делаете. Важно отметить, что для вашего алгоритма управления вы должны использовать интегратор для подавления возмущений крутящего момента и достижения целевых скоростей.
\$\конечная группа\$
\$\начало группы\$
ШИМ (разрешение и частота) влияет на точность скорости посредством создания крутящего момента.
пульсация скорости — это форма ускорения (и замедления), на которую влияет инерция нагрузки и крутящий момент. \$T = J \альфа \$
Для стабилизированной системы, в которой крутящий момент нагрузки равен произведению крутящего момента, больше нет ускорения и достигнута установившаяся скорость. Однако, если есть какое-либо возмущение крутящего момента, это проявится как ускорение -> пульсация скорости
Крутящий момент представляет собой текущее, умноженное на постоянную крутящего момента \$T = K_t \cdot i\$. Таким образом, пульсации тока могут вызывать пульсации крутящего момента, которые вызывают пульсации скорости.
Когда вы управляете двигателем с помощью ШИМ, ваша цель состоит в том, чтобы контролировать «средний» ток. Всегда будет пульсация, когда ток нарастает и падает
Чем выше частота, тем меньше пульсации тока (и, следовательно, меньше пульсации крутящего момента и скорости) Выбор частоты переключения ШИМ в BLDC
А как насчет разрешения ШИМ? Это также играет роль, поскольку наименьший рабочий цикл никогда не бывает достаточно малым для того, чтобы контроллер мог точно управлять режимом работы, который требуется для выполнения команды, и, таким образом, происходит то, что контроллер будет переключаться между двумя замыкающими представляемыми рабочими циклами. Если ваш контроллер имеет разрешение 1%, то контроллер сделает что-то вроде этого: 4% -> 5% -> 4%, если требовалось 4,5%. Это переключение приводит к тому, что на двигатель подается меньшее, большее, меньшее напряжение и, следовательно, еще один источник пульсаций.
Насколько это повлияет на вашу систему, зависит от частоты обновления, дельта-должности, а также задержки распространения через микросхемы интерфейса.
\$\конечная группа\$
1
Твой ответ
Зарегистрируйтесь или войдите в систему
Зарегистрируйтесь с помощью Google
Зарегистрироваться через Facebook
Зарегистрируйтесь, используя электронную почту и пароль
Опубликовать как гость
Электронная почта
Требуется, но не отображается
Опубликовать как гость
Электронная почта
Требуется, но не отображается
Нажимая «Опубликовать свой ответ», вы соглашаетесь с нашими условиями обслуживания, политикой конфиденциальности и политикой использования файлов cookie
.
Разработка системы управления скоростью двигателя постоянного тока на основе микроконтроллера
World Journal of Engineering and Technology
Том 07 № 04 (2019 г.), идентификатор статьи: 96391, 6 стр.
10.4236/wjet.2019.74046
Разработка системы управления моторной скоростью DC на основе микроконтроллера
O. O. Adejumo 1* , W. A. Azeez 2
1 Отдел Физики и Сол -Энергии, Bowen Antialy, IW IWO, IWO, IWO, IWO, IWO, IWO, IWO, IWON, IW IW IW IW IW IW IW IW IW IW IW IW IW IW. Кафедра физики, Политехнический институт, Ибадан, Нигерия
Copyright © 2019 by author(s) and Scientific Research Publishing Inc.
Эта работа находится под лицензией Creative Commons Attribution International License (CC BY 4.0).
http://creativecommons.org/licenses/by/4.0/
Получено: 26 августа 2019 г. ; Принято: 12 ноября 2019 г.; Опубликовано: 15 ноября 2019 г.
АННОТАЦИЯ
В этой работе сообщается о разработке системы управления на основе микроконтроллера для изменения скорости двигателя постоянного тока. Техника широтно-импульсной модуляции (ШИМ) использовалась для управления мощностью, подаваемой на нагрузку (двигатель постоянного тока), без рассеивания лишней мощности. Компоненты и сборка этой схемы микроконтроллера выделены в этой статье, и построенная схема протестирована. Это устройство использовалось для управления скоростью вращающегося вентилятора, подключенного к двигателю постоянного тока. Изменения скорости двигателя постоянного тока были считаны с тахометра, подключенного к этому двигателю, и полученные результаты хорошо согласуются с нашими ожиданиями. Устройства микроконтроллеров скорости двигателя постоянного тока находят применение во многих сферах жизни, и их применение в небольших промышленных установках, несомненно, улучшит стремление к развитию в такой развивающейся стране, как наша.
Ключевые слова:
Микроконтроллер, двигатель постоянного тока, широтно-импульсная модуляция, схема, ротор
1. Введение
Двигатели постоянного тока находят полезное применение во многих системах управления [1]. Регулирование скорости двигателя постоянного тока заключается в изменении скорости привода двигателя до значения, необходимого для выполнения рабочего процесса [2]. Двигатели постоянного тока состоят из двух основных частей, а именно статора, который является неподвижной частью, и ротора, внутренней вращающейся части, обычно называемой якорем. Скорость вращения двигателя постоянного тока зависит от взаимодействия между двумя магнитными полями, создаваемыми неподвижными постоянными магнитами статора и вращающимися электромагнитами якоря. Управляя этим взаимодействием, мы можем управлять скоростью вращения двигателя постоянного тока [3]. Это управление скоростью может быть достигнуто многими различными способами. Простым и легким методом является использование широтно-импульсной модуляции, техники ШИМ, которая может быть достигнута путем управления двигателем постоянного тока несколькими импульсами «включения» и «выключения» и изменением рабочего цикла импульсов при сохранении частоты. постоянная [4]. Изменение или модуляция времени этих импульсов регулирует скорость двигателя, т. е. чем дольше импульс «включен», тем быстрее будет вращаться двигатель, и чем короче «включен» импульс, тем медленнее будет вращаться двигатель. Следовательно, чем шире ширина импульса, тем больше среднее напряжение, подаваемое на клеммы двигателя, тем сильнее магнитный поток внутри обмоток якоря и тем быстрее будет вращаться двигатель. Таким образом, можно регулировать напряжение на клеммах двигателя и, следовательно, управлять мощностью, подаваемой на двигатель. В случаях, когда «включение» и «выключение» выполняются в быстрой последовательности, двигатель вращается с меньшей скоростью между нулевой и полной номинальной скоростью [5]. Это то, что делает контроллер на основе метода ШИМ: он включает и выключает двигатель с помощью последовательности импульсов. Когда двигатель «включен» в течение короткого периода времени и «выключен» в течение длительного времени, он будет вращаться медленно. Когда двигатель «включен» большую часть времени и «выключен» только на короткое время, он будет вращаться с более высокой скоростью, скажем, почти на полной или максимальной номинальной скорости [6]. Целью данной работы является проектирование и создание схемы, которая будет генерировать сигнал широтно-импульсной модуляции для управления скоростью двигателя. Подача сигналов прерывания на микроконтроллер с помощью нажимных переключателей (обозначенных в этой схеме кнопками вверх и вниз) приводит к увеличению и уменьшению скорости двигателя постоянного тока. Это изменение скорости двигателя измерялось тахометром, подключенным к валу двигателя, и наблюдения соответствовали нашим ожиданиям.
2. Материалы и методы
Принципиальная схема, показанная на рисунке 1, отображает схему регулятора скорости двигателя постоянного тока.
Вся сборка состоит из трех основных блоков, а именно; 1) источник питания с подузлом переключателя сброса при подаче питания, 2) основная схема (блок управления), которая получает сигналы через переключатели входа прерывания, и 3) блок переключения, включающий переключатели входа прерывания и переключающий силовой транзистор. для двигателя постоянного тока.
Блок питания этой схемной сборки состоит из: Понижающего трансформатора с маркировкой TRF, сеть переменного тока 230 В переменного тока для обеспечения вторичного выхода 12 В, 500 мА. Этот выход выпрямляется двухполупериодной мостовой выпрямительной схемой, состоящей из четырех диодов IN4001, обозначенных D1, D2, D3 и D4, фильтрованных электролитическим конденсатором емкостью 1000 мкФ, 25 В, обозначенным C1. Регулятор цепи представляет собой интегральную микросхему 7805, 5 В, обозначенную на принципиальной схеме IC1. Это действует как сброс при включении питания для микроконтроллера ATmega 328P. К выходному выводу IC1 последовательно подключен конденсатор емкостью 0,1 мкФ, обозначенный C2, который служит фильтром для выхода IC1. Через C2 подключен резистор 330 Ом, обозначенный R1, который регулирует ток, проходящий через LED1. Переключатель S1 служит для включения и выключения цепи, обеспечивающей ручное управление.
Рис. 1. Схема управления скоростью двигателя постоянного тока.
От этого блока питания было выполнено подключение к главной цепи через переключатель S2. Представленная здесь схема генератора для генерации сигнала широтно-импульсной модуляции использует 8-битный микроконтроллер ATmega 328P с маркировкой IC2, запрограммированный программой ARDUINO C++. От вывода источника питания (1 микроконтроллера) выполняется подключение к источнику питания с помощью последовательно включенного резистора 10 кОм, обозначенного R2, в качестве ограничителя тока. Входы на соответствующие выводы этого микроконтроллера выполнены так, как показано на принципиальной схеме. Выход микроконтроллера подключен к жидкокристаллическому дисплею 16×2, ЖК-дисплей которого взаимодействует с этим микроконтроллером, имея всего 32 символа (по 16 в каждой строке). Для каждого символа имеется 5 × 10 = 50 пикселей, причем все 50 пикселей работают вместе для отображения каждого символа. Пиксели управляются другим контроллером (HD44780) в блоке дисплея. Поскольку номера контактов определены на микроконтроллере, он отображает данные на ЖК-дисплее. Кнопки «Вверх» и «Вниз» служат переключателями увеличения и уменьшения скорости. Два резистора по 10 кОм, подключенные последовательно к этим переключателям, обозначенные как R3 и R4, регулируют подаваемый на них ток. Два неэлектролитических конденсатора емкостью 22 пФ, обозначенные C4 и C5, подключены параллельно кварцевому генератору, обозначенному XRO, и подключены к контактам 9.и 10 микроконтроллера.
Описание схемы
Волна ШИМ для управления скоростью генерируется с помощью предварительно запрограммированного микроконтроллера ARDUINO UNO ATmega 328P, который создает импульсы различной ширины (используя таймер 0) для ШИМ и, таким образом, управляет скоростью двигателя. Кнопки «Вверх» и «Вниз» предназначены для прерывания ввода на контакты 11 и 12, соответственно, микроконтроллера IC2, управляющего увеличением и уменьшением скорости двигателя постоянного тока соответственно. При нажатии любого из этих переключателей генерируется прерывание для изменения рабочего цикла последовательности импульсов. Кнопка «Вверх» предназначена для прерывания и увеличения рабочего цикла последовательности импульсов, а кнопка «Вниз» предназначена для прерывания и уменьшения рабочего цикла последовательности импульсов. Рабочий цикл формы импульса отображается на ЖК-дисплее. От контакта 5 микроконтроллера осуществляется подключение к базе транзистора npn TIP41C (обозначенного Q1) через резистор 1 кОм, обозначенный R5. Этот транзистор действует как переключатель (в данном случае) для двигателя постоянного тока 12 В, обозначенного буквой М, и от коллектора транзистора осуществляется подключение к двигателю М, а от двигателя к источнику питания. Диод D5 представляет собой выпрямительный диод IN4007, подключенный параллельно двигателю для предотвращения протекания обратного тока. К двигателю постоянного тока М был подключен тахометр, который измеряет скорость вращения двигателя. Выходы микроконтроллера (выводы данных с 13 по 18 или выводы данных с D7 по D12) подключены к ЖК-дисплею. На ЖК-дисплее отображается 10 % значения рабочего цикла, другими словами, для рабочего цикла 10 % на ЖК-дисплее отображается значение 1, а для рабочего цикла 70 % значение, отображаемое на ЖК-дисплее, равно 7. Мощность для ЖК-дисплея поступает от регулятора источника питания. Проводные компоненты показаны на рис. 2.
После соединения компонентов вместе узел заключен в корпус переключателя S1, обозначенного как кнопка включения-выключения, кнопки «Вверх» и «Вниз» помечены как увеличение и уменьшение скорости, как показано на корпусе, ЖК-дисплее и вентиляторе.
Рисунок 2. Сборка проводных компонентов.
Рис. 3. Сборка контроллера скорости двигателя постоянного тока.
3. Результат
Нажатие кнопки уменьшения скорости привело к соответствующему снижению скорости двигателя постоянного тока, что проявляется в соответствующем снижении скорости вентилятора. При нажатии кнопки увеличения скорости для увеличения скорости двигателя постоянного тока наблюдалось соответствующее увеличение скорости вентилятора. Скорость вращения двигателя, измеренная тахометром, показана в таблице 1.
4. Обсуждение и заключение
Регуляторы скорости двигателя постоянного тока находят применение во многих сферах жизни. Он находит хорошее применение в системах промышленной автоматизации, управления движением роботов и в ряде бытовых приборов [7]. Его применение в мелкомасштабных промышленных установках, несомненно, повысит стремление к развитию в такой развивающейся стране, как наша. Эта разработанная система управления на основе микроконтроллера для изменения скорости двигателя постоянного тока, описанная в этой работе, определенно улучшит потребность в автоматизации в малых и средних промышленных установках. Компоненты схемы для этой схемы были идентифицированы, а построенная схема протестирована. Эта схема использовалась для управления скоростью электрического вентилятора. Его также можно использовать для управления яркостью лампы, движением маленьких игрушек и рядом других приложений. В этой схеме потери мощности минимальны благодаря использованию метода ШИМ для управления скоростью двигателя. Потери мощности в переключающем транзисторе невелики, потому что транзистор либо полностью «включен», либо полностью «выключен», что обеспечивает линейный тип управления, что приводит к лучшей стабильности скорости. Кроме того, амплитуда напряжения двигателя постоянна, и, следовательно, двигатель всегда работает на полную мощность, а это означает, что двигатель может вращаться намного медленнее без остановки.
Таблица 1. Скорость вращения двигателя.
Благодарности
Это исследование не получило какого-либо специального гранта от финансирующих агентств в государственном, коммерческом или некоммерческом секторах.
Конфликт интересов
Авторы заявляют об отсутствии конфликта интересов в связи с публикацией данной статьи.
Процитировать эту статью
Adejumo, O.O. и Азиз, В. А. (2019) Разработка системы управления скоростью двигателя постоянного тока на основе микроконтроллера. Всемирный журнал инженерии и технологий, 7, 634–639.. https://doi.org/10.4236/wjet.2019.74046
Ссылки
- 1. Russel, Md.K. и Бхуян, М.Х. (2012) Управление скоростью двигателя постоянного тока на основе микроконтроллера с использованием метода ШИМ. Материалы Международной конференции по электротехнике, вычислительной технике и телекоммуникациям RUET, Раджшахи, Бангладеш, 1–2 декабря 2012 г. , стр. 519–522.
- 2. Бхуян, М.Х. (2007) Беспроводная система управления двигателем постоянного тока для позиционирования параболической антенны с использованием микрокомпьютера. Журнал науки и технологий Международного университета Нарцисс (DIUJST), 2, 44–49..
- 3. Бхуян М.Х., Рабби М.А. и Тарик М.М.Г. (2010) Проектирование системы автоматического управления светофором на основе микроконтроллера. Материалы Национальной конференции по электронике и телекоммуникациям для цифрового Бангладеш, Дакка, 2–3 июня 2010 г., стр. 139–142.
- 4. Сискинд, К. С. (1959) Электрические машины постоянного и переменного тока. McGraw Hill Book Co., Нью-Йорк, США.
- 5. Шулер, К.А. и Макнейми, В.Л. (1986) Промышленная электроника и робототехника. McGraw Hill Book Co., Нью-Йорк, США.
- 6. Рашид М.Х. (2010) Схемы силовой электроники, устройства и приложения. Прентис Холл Инк., США.
- 7. Матур, А. (2008) Регулятор скорости двигателя постоянного тока на основе микроконтроллера. ElectronicsForYou, март 2008 г., стр. 92–96.
Использование ШИМ для управления двигателем постоянного тока — блог Upverter
Начните работу с Altium Upverter, зарегистрируйтесь сейчас.
Среднее значение постоянного тока для различных рабочих циклов
Двигатели постоянного тока преобразуют электрическую энергию в механическую, а скорость двигателя постоянного тока прямо пропорциональна значению входного постоянного напряжения. Направление вращения зависит от полярности входного напряжения. Во многих приложениях вам может понадобиться управлять скоростью или направлением вращения, и вы можете использовать широтно-импульсную модуляцию (ШИМ) с H-мостом в качестве простого метода управления скоростью и направлением. В этой статье мы рассмотрим, что такое ШИМ и как использовать ШИМ для управления двигателем постоянного тока.
Что такое ШИМ?
Существует много типов схем модуляции, которые можно использовать для периодического изменения некоторых аспектов цифрового или аналогового сигнала (частотная модуляция, амплитудная модуляция, фазовая модуляция и т. д.). Как следует из названия, ШИМ — это тип модуляции, при котором ширина импульса изменяется без изменения частоты (то есть частоты повторения) сигнала. Время, в течение которого сигнал находится в состоянии ВЫСОКОГО уровня, называется рабочим циклом. Как мы увидим, эта величина является фундаментальной при использовании ШИМ для управления двигателем постоянного тока.
Использование ШИМ приводит к изменению среднего значения постоянного тока сигнала при прохождении через фильтр нижних частот. Если такой сигнал подается на двигатель постоянного тока, мы можем изменить скорость двигателя, изменив коэффициент заполнения ШИМ-сигнала. Изменение ширины импульса создается за счет увеличения времени включения (ВЫСОКОЕ значение) импульса при уменьшении времени выключения (НИЗКОЕ значение) на ту же величину, чтобы частота сигнала оставалась постоянной. Увеличение времени включения увеличивает среднее значение постоянного напряжения сигнала и наоборот. На следующем рисунке показано изменение среднего значения постоянного тока в зависимости от рабочего цикла.
Среднее значение постоянного тока ШИМ-сигнала для различных значений коэффициента заполнения.
Простое соотношение для расчета среднего значения постоянного тока:
, где В(REF) — значение высокого логического уровня. Это позволяет аналоговое управление двигателем постоянного тока с помощью цифрового сигнала, что позволяет использовать микроконтроллеры для управления двигателями постоянного тока. Микроконтроллер может динамически изменять ширину импульса, обеспечивая мгновенное или постоянное изменение соответствующей скорости двигателя постоянного тока. Мы можем видеть, как выходное напряжение динамически изменяется в зависимости от рабочего цикла:
Скорость двигателя постоянного тока в зависимости от рабочего цикла
Усиление выходного сигнала ШИМ
К сожалению, невозможно использовать выход микроконтроллера для прямого управления двигателем постоянного тока, поскольку ток обычно слишком мал для управления двигателем. Кроме того, все двигатели постоянного тока имеют пусковое напряжение, которое гарантирует, что двигатель начнет двигаться в любом положении. Во многих случаях выходного сигнала микроконтроллера может быть недостаточно для запуска двигателя.
Обычно сигнал ШИМ используется для управления переключателем BJT или FET, который подключает двигатель постоянного тока к источнику высокого напряжения. Напряжение, достигающее питания двигателя постоянного тока, в этом случае становится равным
Схема соединения выхода ШИМ с двигателем постоянного тока показана ниже:
Схема драйвера полевого МОП-транзистора для двигателя постоянного тока. Источник изображения .
Использование H-моста для управления направлением
Если нам нужно управлять направлением вращения двигателя, нам нужно изменить направление тока через него, и наиболее распространенный способ сделать это — использовать H-мост. H-мост содержит четыре переключателя в конфигурации мостового типа с двигателем в центре.
H-мост для управления двигателем
Выборочно включая различные переключатели, мы можем изменить направление тока и, следовательно, направление вращения двигателя. Это также можно использовать для внезапного торможения двигателя или для того, чтобы двигатель работал свободно, пока он не остановится из-за трения. Замыкающие выключатели S1 и S4 будут вращать двигатель в одном направлении, и наоборот, когда S2 и S3 замкнуты. Двигатель сломается, если вы замкнете переключатели S2 и S4 при разомкнутых других переключателях или когда вы замкнете S1 и S3.
Если хотите, вы можете управлять направлением вращения двигателя цифровым способом, поместив транзисторы в приведенную выше схему H-моста вместо механических переключателей. Например, когда транзисторы S1 и S4 выдают ВЫСОКИЙ уровень, двигатель будет вести себя так же, как если бы механические переключатели были закрыты. То же самое можно сказать и об остальных конфигурациях коммутаторов.
Использование ШИМ для управления двигателем постоянного тока в вашем следующем проекте
Теперь, когда у вас есть достаточно хорошее представление о том, как использовать ШИМ для управления двигателем постоянного тока и построить H-мост для дополнительной степени свободы, вы можете легко построить цифровая схема для управления направлением и для усиления входного напряжения для запуска двигателя. Для этого требуется источник ШИМ и 5 дискретных транзисторов. Вы также можете использовать микроконтроллер (например, встроенный в Arduino) для генерации ШИМ-сигнала и численного управления рабочим циклом. Если вы не хотите строить схему управления направлением самостоятельно, вы можете использовать 29Драйвер двигателя постоянного тока с двойным Н-мостом 8N. Пример этого проекта можно посмотреть здесь.
Вы можете бесплатно зарегистрироваться и получить доступ к лучшему браузерному редактору печатных плат, редактору схем и базе данных компонентов. Посетите Upverter сегодня, чтобы узнать больше.
Нравится:
Нравится Загрузка…
Управление скоростью двигателя постоянного тока с использованием аналогового метода ШИМ – IJERT
Нандкишор П. Джоши, член ISTE1, Аджай П. Такаре, член IEEE, член ISTE2 Департамент КИПиА , SCET, Surat1, Кафедра электронной техники, SIPNA, Amravati2
Двигатель постоянного тока (DC) уже стал важной конфигурацией привода для многих применений в широком диапазоне мощностей и скоростей. Простота управления и отличная производительность двигателей постоянного тока гарантируют, что количество приложений, использующих их, будет продолжать расти в обозримом будущем. В этой статье объясняется метод управления скоростью двигателя постоянного тока с помощью широтно-импульсной модуляции (ШИМ). ШИМ генерируется с помощью микроконтроллера 8051. Для управления двигателем используется H-мост, состоящий из четырех полевых МОП-транзисторов. Точное управление двигателем постоянного тока с низким крутящим моментом достигается с помощью простого и недорогого оборудования. В этой статье показано, что точное и точное управление небольшими двигателями постоянного тока может быть эффективно и действенно выполнено без использования сложных схем и дорогостоящих компонентов.
Введение
Двигатель постоянного тока играет важную роль в современной промышленности. Они широко используются в промышленности из-за своей низкой стоимости, менее сложной структуры управления и широкого диапазона скорости и крутящего момента. Двигатели постоянного тока обеспечивают высокий пусковой момент, необходимый для тяговых приложений. Существует несколько типов приложений, в которых нагрузка на двигатель постоянного тока варьируется в широком диапазоне. Эти приложения могут потребовать высокой точности управления и хороших динамических характеристик. Более высокий крутящий момент можно получить с помощью мотор-редукторов. Термин «мотор-редуктор» используется для обозначения двигателя, в который встроена система редуктора (или редуктор). Редуктор увеличивает крутящий момент двигателя, одновременно снижая его выходную скорость.
применяются в переносных станках с питанием от аккумуляторов, в автомобильной технике как
стартеров, двигателей вентиляторов и во многих приложениях управления в качестве исполнительных механизмов, а также в качестве устройств измерения скорости и положения. В повседневных предметах большого объема, таких как ручные дрели и кухонная техника, используется серводвигатель постоянного тока, известный как универсальный двигатель. Эти двигатели могут хорошо работать как на переменном, так и на постоянном токе. Одним из недостатков (предосторожностей) двигателей постоянного тока с последовательной обмоткой является то, что если они не нагружены, единственное, что ограничивает их скорость, — это ветровой износ и потери на трение. По сравнению с двигателями переменного тока или двигателями постоянного тока с возбуждением, двигатели с постоянными магнитами обычно физически меньше по габаритным размерам и легче для данной номинальной мощности.
В основном существует три метода управления скоростью приводов постоянного тока, а именно управление полем, управление напряжением якоря и методы управления сопротивлением якоря. В целом метод управления напряжением якоря широко используется для управления приводами постоянного тока. В тиристерном методе используется управляемый выпрямитель или прерыватель для изменения подаваемого напряжения за счет изменения угла включения, но из-за участия элементов силовой электроники наблюдаются нелинейные моментно-скоростные характеристики, что нежелательно для эффективности управления. Техника фазовой автоподстройки частоты также используется для точного управления скоростью и регулирования нулевой скорости. Широтно-импульсная модуляция является широко используемым методом управления скоростью двигателя. В базовом методе широтно-импульсной модуляции (ШИМ) рабочая мощность двигателей включается и выключается для модуляции тока двигателя с помощью полевых МОП-транзисторов. В этой статье обсуждается метод аналоговой широтно-импульсной модуляции, который приводит в действие двигатель постоянного тока путем переключения полевых МОП-транзисторов, подключенных к Н-мосту.
Двунаправленная полная мостовая схема
Управление щеточным двигателем постоянного тока в обоих направлениях путем изменения направления тока через него может быть реализовано с помощью мостовой схемы, состоящей из четырех N-канальных полевых МОП-транзисторов. Полная мостовая схема показана на рисунке 1. Каждая сторона двигателя может быть подключена либо к положительному, либо к отрицательному аккумулятору. Обратите внимание, что только один полевой МОП-транзистор с каждой стороны двигателя должен быть включен одновременно, иначе они закоротят батарею и сгорят.
Чтобы заставить двигатель двигаться вперед, Q4 включается, а на Q1 подается ШИМ-сигнал. Текущий путь — от Q1 до Q4. Обратите внимание, что есть также диод, подключенный в обратном направлении через обмотку возбуждения. Это нужно для измерения тока в обмотке возбуждения, когда все четыре полевых МОП-транзистора в мосту выключены.
Q4 остается включенным, поэтому, когда сигнал ШИМ отключен, ток может продолжать течь по нижнему контуру через собственный диод Q3.
Чтобы заставить двигатель двигаться назад, Q3 включается, а на Q2 подается ШИМ-сигнал.
Q3 остается включенным, поэтому, когда сигнал ШИМ отключен, ток может продолжать течь по нижнему контуру через собственный диод Q4.
Рисунок 1. Полная принципиальная схема драйвера Н-моста
Для регенерации, например, когда двигатель движется назад, двигатель (который теперь действует как генератор) пропускает ток прямо через якорь, через диод Q2, через батарею (тем самым заряжая ее) и обратно через диод Q3. .Скорость двигателя постоянного тока прямо пропорциональна напряжению питания, поэтому, если мы уменьшим напряжение питания с 12 В до 6 В, двигатель будет работать на половине скорости. Лучший способ — очень быстро включать и выключать питание двигателя. Если переключение происходит достаточно быстро, мотор этого не замечает, он замечает только средний эффект. Это включение-выключение осуществляется мощными полевыми МОП-транзисторами. Это принцип переключения режимов управления скоростью. Таким образом, скорость устанавливается широтно-импульсной модуляцией (ШИМ).
Широтно-импульсная модуляция
Самый простой способ управления скоростью вращения двигателя постоянного тока — это управление напряжением его возбуждения. Чем выше напряжение, тем выше скорость, которую пытается развить двигатель. Во многих приложениях простое регулирование напряжения может привести к большим потерям мощности в цепи управления, поэтому метод широтно-импульсной модуляции (ШИМ) используется во многих приложениях для управления двигателями постоянного тока. Соотношение на
время до выключения определяет скорость двигателя. Выполняя ШИМ-управление, имейте в виду, что двигатель — это низкочастотное устройство. Причина в том, что двигатель в основном представляет собой большой индуктор. Он не способен пропускать высокочастотную энергию и, следовательно, не будет хорошо работать при использовании высоких частот. Требуются разумно низкие частоты, и тогда будут работать методы ШИМ. Низкие частоты, как правило, лучше, чем более высокие частоты, но ШИМ перестает быть эффективным на слишком низкой частоте. Идея о том, что ШИМ с более низкой частотой работает лучше, просто отражает то, что цикл включения должен быть довольно широким, прежде чем двигатель начнет потреблять какой-либо ток (из-за индуктивности двигателя). Более высокая частота ШИМ будет работать нормально, если вы подключите большой конденсатор к двигателю или закорачиваете двигатель в выключенном состоянии. Причина этого в том, что короткие импульсы не позволяют протекать большому току до отключения. Затем ток, который действительно протекал, рассеивается в виде индуктивного толчка — вероятно, в виде тепла через диоды обратного хода. Конденсатор интегрирует импульс и обеспечивает более длительный, но меньший ток через двигатель после отключения драйвера. Индуктивного удара также нет, так как ток не отключается. Знание частоты спада нижних частот двигателя помогает определить оптимальную частоту для работы ШИМ. Здесь двигатель тестируется с квадратичным рабочим циклом с использованием переменной частоты, а затем наблюдается падение крутящего момента по мере увеличения частоты. Этот метод может помочь определить точку спада с точки зрения энергоэффективности. Однако, когда мы вычисляем рассеиваемую мощность на сопротивлениях рассеяния в нашем двигателе и регуляторе скорости, для случая постоянного тока:
П= И2Р
и для корпуса переключения средняя мощность
P=(2I)2R/2 + O2R/2 P = 2I2R
Таким образом, в сигнале переключения вдвое больше мощности
теряется в паразитных сопротивлениях. На практике текущая форма волны не будет прямоугольной, но всегда остается верным, что потери мощности в форме волны, отличной от постоянного тока, будут больше.
Выбор частоты ШИМ на основе характеристик двигателя
Частота результирующего ШИМ-сигнала зависит от частоты пилообразного сигнала. Один из способов выбрать подходящую частоту заключается в следующем: скажем, например, мы хотим, чтобы текущая форма сигнала была стабильной с точностью до p процентов. Затем мы можем математически вычислить минимальную частоту для достижения этой цели.
На рис. 2 показана эквивалентная схема двигателя и кривая тока при включении и выключении ШИМ-сигнала. Здесь показан наихудший случай при коэффициентах ШИМ 50:50, а рост тока показан для стационарного или заглохшего двигателя, что также является наихудшим случаем.
T — период коммутации, который является величиной, обратной частоте коммутации. Просто взяв задний фронт текущей формы волны, это дается уравнением
i = Iet/c = Ie-tR/L
– постоянная времени цепи, которая равна L/R.
Значит, ток в момент времени t = T/2 (i1) должен быть не менее чем на P% ниже, чем в момент t = 0 (i0). Это означает, что есть ограничивающее условие:
i1 = (1 – P/100)i0
I e-TR/2L = (1-P/100)Ie0 e-TR/2L = (1-P/100)e0
-TR/2L = пер.(1 P/100) T = -2L/R пер.(1 P/100)
так как частота f = 1/T f = R/-2L ln(1 p/100)
Некоторые значения пытаются получить разные частоты. Параметры двигателя следующие:
R = 0,04 и L = 70H
Мы также должны учитывать сопротивление используемых МОП-транзисторов в открытом состоянии, 2 x 10 м, что дает общее сопротивление R = 0,06 Ом.
Рисунок 2. Влияние L/R на ток
Таблица 1
|
Частота и допустимая пульсация Процент |
частота |
|
1 |
42 кГц |
|
5 |
8,2 кГц |
|
10 |
4 кГц |
|
20 |
1900 Гц |
|
50 |
610 Гц |
Для этого двигателя можно построить график:
Рис. 3. Допустимая пульсация в зависимости от частоты коммутации
Как показано на графике выше, достаточно низкие пульсации могут быть достигнуты при частоте коммутации всего 5 кГц.
К сожалению, производители двигателей редко публикуют значения индуктивности катушек в своих спецификациях, поэтому единственный способ узнать это — измерить ее. Для этого требуется чувствительное оборудование для тестирования моста LCR, которое стоит довольно дорого.
Расчет траектории
Траектория движения описывает управление платой контроллера движения или командный сигнал, выдаваемый драйверу/усилителю, что приводит к действию двигателя/движения, которое следует профилю. Типичный контроллер движения вычисляет сегменты траектории профиля движения на основе запрограммированных вами значений параметров. Контроллер движения использует желаемое целевое положение, максимальную целевую скорость и заданные вами значения ускорения, чтобы определить, сколько времени он тратит на три основных сегмента движения (которые включают ускорение, постоянную скорость и замедление).
Для сегмента ускорения типичного трапециевидного профиля движение начинается с остановки или предыдущего движения и следует заданной рампе ускорения, пока скорость не достигнет целевой скорости для движения. Движение продолжается с целевой скоростью в течение заданного периода времени, пока контроллер не определит, что пора начинать сегмент замедления, и не замедлит движение до остановки точно в желаемой целевой позиции.
Рисунок 4. Фиксированный профиль скорости
Профиль скорости — это график зависимости скорости двигателя от времени. Площадь внутри кривой, которую создает профиль скорости, представляет собой пройденное расстояние. Профилирование скорости полезно для приложений, где необходимы определенные скорости в определенное время. Два типичных профиля скорости показаны на рис. 4 и рис. 5.
Рисунок 5. Профиль переменной скорости
Эти два рисунка являются примерами профилей скорости. В первых примерах двигатель просто разгоняется до целевой скорости с заданным ускорением, работает с целевой скоростью, а затем замедляется через определенное время. Во втором примере двигатель разгоняется до определенной скорости, работает с этой целевой скоростью в течение определенного периода времени, разгоняется до более высокой скорости, затем движется с этой скоростью в течение определенного периода времени, а затем замедляется до нуля. Концепция, связанная с профилированием скорости, называется смешиванием. Используя смешивание, вы можете смешивать два профиля скорости вместе, чтобы сделать плавный переход между ними.
Рисунок 6. Принципиальная схема драйвера
Результаты моделирования
1
Q1
БУЗ31
0
Q3
БУЗ31
В1
12 В
+88,8
0
Q2
БУЗ31
1
4 квартал
БУЗ31
Рис. 7. H-мост, приводящий в движение двигатель постоянного тока
Более точный контроль можно получить, разделив шкалу на большее количество интервалов
Рисунок 8. ШИМ-сигнал с коэффициентом заполнения 90 %
В1
12 В
Q1
БУЗ31
Q3
БУЗ31
У1
19 XTAL1
18 XTAL2
9 РСТ
P0. 0/AD0 39
P0.1/AD1 38
P0.2/AD2 37
P0.3/AD3 36
P0.4/AD4 35
P0.5/AD5 34
P0.6/AD6 33
P0.7/AD7 32
P2.0/A8 21
P2.1/A9 22
P2.2/A10 23
Q2
БУЗ31
+88,8
4 квартал
БУЗ31
-
ПСЕН
-
АЛЭ
-
ЕА
1 Р1.0
2 П1.1
3 П1.2
4 П1.3
5 Р1.4
6 П1.5
7 П1.6
8 Р1.7
АТ89К51
P2.3/A11 24
P2.4/A12 25
P2.5/A13 26
P2.6/A14 27
P2.7/A15 28
P3.0/RXD 10
P3.1/TXD 11
P3.2/INT0 12
P3.3/INT1 13
P3.4/T0 14
P3.5/T1 15
P3.6/WR 16
P3.7/RD 17
Рисунок 11. Взаимодействие микроконтроллера с двигателем постоянного тока
Рисунок 9. ШИМ-сигнал с коэффициентом заполнения 50 %
Рисунок 10. ШИМ-сигнал с коэффициентом заполнения 10 %
Заключение
Управление скоростью двигателя постоянного тока может осуществляться с помощью цифровой или аналоговой широтно-импульсной модуляции. При использовании цифрового ШИМ управление осуществляется на двух уровнях: высоком и низком. В то время как при использовании аналоговой ШИМ можно получить управление в широком диапазоне значений. В предлагаемом методе коэффициент заполнения варьируется от 0 до 9 процентов.0 процентов, и двигатель управляется на разных скоростях. Интервалы берутся через каждые 10 процентов. Наблюдается, что при 50-процентном рабочем цикле скорость двигателя постоянного тока составляет половину скорости при полном напряжении.
Ссылки
Ремия Равиндран, Арун Кумар, Регулятор скорости двигателя постоянного тока с использованием LABVIEW и Visual Basic, IJECT Vol. 3, выпуск 1, январь – март 2012 г.
Н. Миливоевич, Махеш Кришнамурти и Юсуф Гуркайнак, Анализ стабильности управления бесщеточными двигателями и генераторами постоянного тока на основе FPGA
Использование технологии цифровой ШИМ, IEEE Transactions on Industrial Electronics, Vol.
