Что такое широтно-импульсный преобразователь. Как работает ШИМ-контроллер. Какие компоненты нужны для построения эффективного преобразователя. Как рассчитать параметры схемы. Как повысить КПД преобразователя.
Принцип работы широтно-импульсного преобразователя
Широтно-импульсный преобразователь (ШИП) — это устройство для преобразования постоянного напряжения одного уровня в другой. Основой его работы является широтно-импульсная модуляция (ШИМ).
ШИМ-контроллер генерирует управляющие импульсы переменной длительности, которые открывают и закрывают силовой ключ (транзистор). Это позволяет регулировать среднее значение выходного напряжения.
Рассмотрим принцип работы повышающего ШИП на примере схемы с ШИМ-контроллером DS1875:
- Во время открытого состояния транзистора энергия накапливается в индуктивности
- При закрытии транзистора энергия из индуктивности передается в нагрузку через диод
- Конденсатор сглаживает пульсации выходного напряжения
Изменяя скважность импульсов ШИМ, можно регулировать выходное напряжение в широких пределах.
Основные компоненты широтно-импульсного преобразователя
Для построения базовой схемы повышающего ШИП необходимы следующие ключевые компоненты:
- ШИМ-контроллер (например, DS1875)
- Силовой ключ (MOSFET-транзистор)
- Индуктивность (дроссель)
- Диод Шоттки
- Выходной конденсатор
Правильный выбор этих компонентов критически важен для достижения высокой эффективности преобразователя.
Выбор индуктивности
Индуктивность играет ключевую роль в работе ШИП. От ее параметров зависит эффективность накопления и передачи энергии.
При выборе индуктивности нужно учитывать следующие факторы:
- Требуемое значение индуктивности (рассчитывается)
- Максимальный рабочий ток (должен быть больше пикового тока)
- Сопротивление постоянному току (чем меньше, тем лучше)
- Габаритные размеры (учитывая ограничения платы)
Оптимальным будет выбор индуктивности с минимальным DCR и достаточным запасом по току насыщения.
Выбор силового ключа
В качестве силового ключа обычно используется MOSFET-транзистор. Основные параметры при его выборе:
- Максимальное напряжение сток-исток (с запасом)
- Максимальный ток стока (больше пикового тока индуктивности)
- Сопротивление канала в открытом состоянии (минимальное)
- Заряд затвора и выходная емкость (минимальные)
Транзистор с малым RDS(on) и низкими паразитными емкостями обеспечит минимальные потери.
Расчет параметров широтно-импульсного преобразователя
Для расчета основных параметров ШИП необходимо знать следующие исходные данные:
- Входное напряжение VIN
- Требуемое выходное напряжение VOUT
- Максимальный выходной ток I
- КПД преобразователя η (ориентировочно)
Расчет начинается с определения требуемой энергии, которую нужно передать в нагрузку за один период коммутации:
E = VOUT * IOUT * T / η
Где T — период коммутации.
Далее рассчитывается требуемое значение индуктивности:
L = 2 * E / (Ipk2)
Где Ipk — пиковый ток индуктивности.
Рабочий цикл ШИМ определяется как:
D = (VOUT — VIN) / VOUT
Оптимизация эффективности широтно-импульсного преобразователя
Эффективность ШИП зависит от многих факторов. Рассмотрим основные способы ее повышения:

Снижение потерь в силовых компонентах
Для минимизации потерь проводимости нужно:
- Выбирать MOSFET с минимальным RDS(on)
- Использовать индуктивность с низким DCR
- Применять диоды Шоттки с малым падением напряжения
Оптимизация частоты коммутации
Выбор оптимальной частоты коммутации — это компромисс между:
- Габаритами магнитных компонентов (уменьшаются с ростом частоты)
- Динамическими потерями (растут с увеличением частоты)
Обычно оптимум лежит в диапазоне 100-500 кГц.
Снижение коммутационных потерь
Для уменьшения потерь при переключении следует:
- Выбирать MOSFET с малым зарядом затвора
- Оптимизировать цепь управления затвором
- Использовать снабберные цепи
Практические рекомендации по разработке ШИП
При проектировании широтно-импульсного преобразователя следует учитывать ряд важных моментов:
Выбор топологии
Выбор оптимальной топологии зависит от требований к преобразователю:
- Повышающий ШИП — для увеличения напряжения
- Понижающий ШИП — для уменьшения напряжения
- Инвертирующий ШИП — для инверсии полярности
Для широкого диапазона преобразования используют SEPIC или Ćuk топологии.
Расчет тепловых режимов
Необходимо обеспечить эффективный отвод тепла от силовых компонентов:
- Рассчитать мощность потерь в ключевых элементах
- Выбрать соответствующие радиаторы
- Обеспечить хорошую теплопроводность к плате
Выбор выходного фильтра
Для уменьшения пульсаций выходного напряжения применяют LC-фильтры:
- Емкость конденсатора выбирают исходя из допустимых пульсаций
- Индуктивность подбирают для получения нужной частоты среза
Важно использовать конденсаторы с низким ESR.
Типовые применения широтно-импульсных преобразователей
ШИП находят широкое применение в различных областях электроники:
Источники питания
ШИП используются для создания стабилизированных источников питания:
- AC/DC преобразователи
- DC/DC преобразователи
- Зарядные устройства
Управление электродвигателями
ШИП применяются для регулирования скорости и момента электродвигателей:
- Приводы постоянного тока
- Системы управления бесколлекторными двигателями
- Сервоприводы
Светодиодные драйверы
ШИП эффективно используются для питания мощных светодиодов:
- Регулировка яркости
- Стабилизация тока
- Многоканальные RGB-драйверы
Перспективы развития технологии ШИП
Технология широтно-импульсных преобразователей продолжает активно развиваться:
Новые полупроводниковые технологии
Применение GaN и SiC транзисторов позволяет:
- Повысить рабочую частоту до единиц МГц
- Увеличить плотность мощности
- Улучшить тепловые характеристики
Цифровое управление
Использование цифровых контроллеров обеспечивает:
- Адаптивное управление
- Сложные алгоритмы оптимизации
- Коммуникационные возможности
Интеграция силовой и управляющей части
Создание интегрированных решений позволяет:
- Уменьшить габариты преобразователей
- Снизить стоимость
- Повысить надежность
Эти тенденции открывают новые возможности применения ШИП в различных областях.
широтно-импульсная модуляция — MATLAB и Simulink
Перейти к содержимомуОсновное содержание
Генераторы широтно-импульсной модуляции
Генерация волн широтно-импульсной модуляции (ШИМ) для силового преобразователя контроль.
| ШИМ Генератор | Генерация сигнала или сигнала с широтно-импульсной модуляцией |
| Генератор ШИМ (Многоуровневый) | Генерация сигнала с широтно-импульсной модуляцией или сигнала для модульного многоуровневого преобразователи |
| ШИМ-генератор (Пятифазный, двухуровневый) | Генерация пятифазного двухуровневого сигнала с широтно-импульсной модуляцией |
| ШИМ стробирующий сигнал Генератор (трехфазный, трехуровневый) | Генерация двенадцати управляющих импульсов для трехфазного трехуровневого стробирования коммутационные устройства |
| PWM Gate Signal Генератор (трехфазный, двухуровневый) | Генерирует шесть управляющих импульсов для трехфазного двухуровневого стробирующего переключения устройства |
| ШИМ-сигнал затвора Генератор (пятифазный, двухуровневый) | Генерация десяти управляющих импульсов для пятифазного двухуровневого стробирования коммутационные устройства |
| ШИМ-генератор (трехфазный, Трехуровневый) | Генерирует трехфазный, трехуровневый сигнал с широтно-импульсной модуляцией или сигнал для вентильные коммутационные устройства |
| ШИМ-генератор (трехфазный, Двухуровневая) | Генерация трехфазного двухуровневого сигнала с широтно-импульсной модуляцией |
| Синхронизация ШИМ и Генератор сигналов (трехфазный, трехуровневый) | Генерация трехфазной, трехуровневой информации о времени стробирования |
| Синхронизация ШИМ и Генератор сигналов (трехфазный, двухуровневый) | Генерация трехфазной, двухуровневой информации о времени стробирования |
| Синхронизация ШИМ и Генератор сигналов (пятифазный, двухуровневый) | Генерация пятифазной двухуровневой информации о времени стробирования |
| Генератор ШИМ (Венский выпрямитель) | Венский выпрямитель Генератор сигналов с широтно-импульсной модуляцией |
| Тиристор 6-импульсный генератор | Тиристорный 6-импульсный генератор в одноимпульсном режиме |
| Тиристор 12-импульсный генератор | Генерация тиристорного 12-импульсного сигнала в одноимпульсном режиме |
Выберите веб-сайт, чтобы получить переведенный контент, где он доступен, и ознакомиться с местными событиями и предложениями. В зависимости от вашего местоположения мы рекомендуем вам выбрать: .
В зависимости от вашего местоположения мы рекомендуем вам выбрать: .
Вы также можете выбрать веб-сайт из следующего списка:
Европа
Свяжитесь с местным офисом
- Пробная версия программного обеспечения
- Пробная версия программного обеспечения
- Обновления продукта
- Обновления продуктов
Как разработать эффективный преобразователь постоянного тока с помощью ШИМ-контроллера DS1875
Abstract
DS1875 оснащен контроллером с широтно-импульсной модуляцией (ШИМ), который можно использовать для управления преобразователем постоянного тока. Затем преобразователь постоянного тока можно использовать для создания высоких напряжений смещения, необходимых для лавинных фотодиодов (APD). В этих указаниях по применению описывается работа повышающего преобразователя, в котором используется DS1875. Обсуждение касается выбора катушки индуктивности и частоты переключения, а также выбора компонентов, повышающих эффективность преобразователя.
Обзор
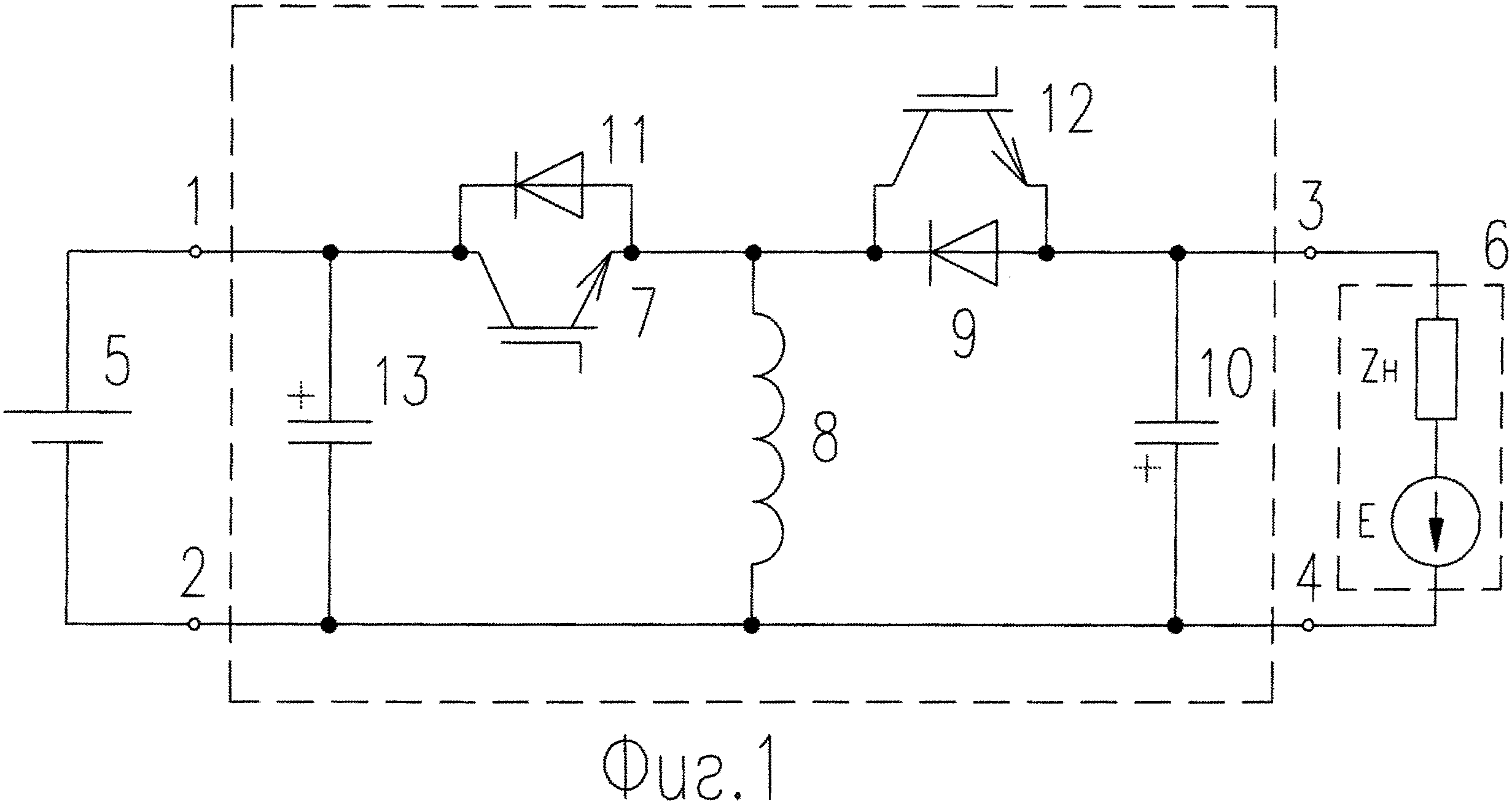
DS1875 оснащен генератором широтно-импульсной модуляции (ШИМ), который можно использовать для управления преобразователем постоянного тока. В типичном приложении ШИМ-контроллер используется в повышающем преобразователе для создания напряжения смещения для лавинных фотодиодов (ЛФД). ШИМ-контроллер в DS1875 может работать как в непрерывном, так и в прерывистом режимах проводимости. Для создания высокого напряжения смещения, необходимого для ЛФД, преобразователь постоянного тока должен работать в прерывистом режиме. На рис. 1 показан простой повышающий преобразователь, использующий ШИМ-контроллер DS1875.
В этих указаниях по применению описывается работа повышающего преобразователя с DS1875. В статье объясняется, как выбрать катушку индуктивности и частоту переключения, а затем компоненты, которые повысят эффективность преобразователя.
Рис. 1. Схема преобразователя постоянного тока с использованием ШИМ-контроллера DS1875. Обратите внимание, что для этого указания по применению R1 и C3 были установлены на 0. Обратитесь к техническому описанию DS1875 для получения информации о выборе этих компонентов фильтра.
Обратите внимание, что для этого указания по применению R1 и C3 были установлены на 0. Обратитесь к техническому описанию DS1875 для получения информации о выборе этих компонентов фильтра.
Работа повышающего преобразователя
DS1875 обеспечивает ШИМ-сигнал на выводе SW, который используется для управления преобразователем постоянного тока. В течение каждого периода ПВ повышающий преобразователь имеет фазу заряда и фазу разряда. На рис. 2 показаны ток и напряжение катушки индуктивности во время фазы зарядки и разрядки.
Фаза заряда происходит, когда транзистор Q1 открывается, подавая входное напряжение V IN на катушку индуктивности L1. Диод D1 предотвращает разряд конденсатора C2 на землю через транзистор Q1. Поскольку входное напряжение является постоянным, ток индуктора линейно возрастает, как показано на рисунке 2. Уравнение для тока индуктора задается следующим образом:
Энергия, накопленная в индукторе во время фазы зарядки, определяется выражением:
I PK — пиковый ток, протекающий в катушке индуктивности. Этот ток возникает в конце фазы зарядки. Используя уравнение 1, этот пиковый ток можно рассчитать как:
Этот ток возникает в конце фазы зарядки. Используя уравнение 1, этот пиковый ток можно рассчитать как:
Где D и T — рабочий цикл (%) и период времени (с) частоты переключения. Уравнение 3 можно заменить уравнением 2, дав энергию, запасенную в катушке индуктивности во время фазы заряда:
Фаза разряда начинается, когда Q1 выключен. Во время фазы разряда энергия, накопленная в индукторе, передается на выход. Эта энергия передается, потому что ток катушки индуктивности продолжает течь даже после выключения транзистора Q1. Теперь ток течет через диод D1 к выходному конденсатору C2. Чтобы ток катушки индуктивности протекал через диод, напряжение на клеммах V L должно быть больше, чем напряжение на клеммах V OUT .
На рис. 2 показан большой всплеск напряжения при V L , когда через диод начинает протекать ток дросселя. Теперь, когда на катушке индуктивности имеется большое отрицательное напряжение, наклон тока через катушку индуктивности меняется на противоположный. Из-за большого напряжения на индукторе ток в индукторе быстро уменьшится до нуля. Как только вся энергия, запасенная в катушке индуктивности, поступает на выход, ток катушки индуктивности уменьшается до нуля. Поскольку больше нет тока для поддержания напряжения на V L , этот узел возвращается к входному напряжению, V В . Ток катушки индуктивности во время фазы разряда определяется выражением:
Из-за большого напряжения на индукторе ток в индукторе быстро уменьшится до нуля. Как только вся энергия, запасенная в катушке индуктивности, поступает на выход, ток катушки индуктивности уменьшается до нуля. Поскольку больше нет тока для поддержания напряжения на V L , этот узел возвращается к входному напряжению, V В . Ток катушки индуктивности во время фазы разряда определяется выражением:
Рис. 2. Ток и напряжение дросселя.
Эффективность преобразователя постоянного тока
В преобразователе постоянного тока существует множество источников потерь, которые снижают эффективность системы. Эти потери можно разделить на две основные группы: потери эффективности, вызванные пиковым током индуктора; и коммутационные потери, возникающие каждый раз, когда цепь переключается с фазы зарядки на фазу разряда. Мы обсудим каждый тип потерь по очереди.
Существует три основных источника потери эффективности, вызванной током катушки индуктивности. Двумя наиболее важными источниками являются сопротивление сток-исток транзистора, когда он проводит ток, и сопротивление катушки индуктивности постоянному току. Оба этих действия добавляют сопротивление последовательно с катушкой индуктивности. Эти сопротивления потребляют входную мощность и уменьшают напряжение на катушке индуктивности во время фазы зарядки. Когда индуктор разряжается через диод, также происходит потеря мощности, пропорциональная току индуктора.
Двумя наиболее важными источниками являются сопротивление сток-исток транзистора, когда он проводит ток, и сопротивление катушки индуктивности постоянному току. Оба этих действия добавляют сопротивление последовательно с катушкой индуктивности. Эти сопротивления потребляют входную мощность и уменьшают напряжение на катушке индуктивности во время фазы зарядки. Когда индуктор разряжается через диод, также происходит потеря мощности, пропорциональная току индуктора.
Коммутационные потери возникают во время каждого цикла преобразователя постоянного тока. Наиболее очевидные потери при переключении вызваны паразитной емкостью в цепи. Каждый раз, когда катушка индуктивности разряжается через диод, узел на аноде диода должен заряжаться до уровня напряжения, превышающего V OUT . Этот узел также имеет емкость сток-исток транзистора и емкость анода, обе из которых должны быть заряжены, прежде чем диод сможет начать проводить ток.
Существуют и другие источники коммутационных потерь. Потери при переключении возникают в начале каждого цикла зарядки, когда емкость затвора транзистора должна быть заряжена до того, как транзистор включится. Потери в сердечнике катушки индуктивности являются еще одним источником потерь энергии. По мере увеличения частоты коммутации увеличиваются потери в сердечнике катушки индуктивности. Величина этих потерь зависит от материала и размера сердечника индуктора. Коммутационные потери также возникают во время обратного восстановления диода. За это время заряд, накопленный на выходе, может пройти через катушку индуктивности.
Потери при переключении возникают в начале каждого цикла зарядки, когда емкость затвора транзистора должна быть заряжена до того, как транзистор включится. Потери в сердечнике катушки индуктивности являются еще одним источником потерь энергии. По мере увеличения частоты коммутации увеличиваются потери в сердечнике катушки индуктивности. Величина этих потерь зависит от материала и размера сердечника индуктора. Коммутационные потери также возникают во время обратного восстановления диода. За это время заряд, накопленный на выходе, может пройти через катушку индуктивности.
Минимизация потерь эффективности
Правильный выбор компонентов и компоновка печатной платы существенно влияют на возникающие паразитные потери. Работой системы также можно управлять двумя разными способами для повышения эффективности. Первый способ заключается в уменьшении тока катушки индуктивности, что снижает резистивные потери катушки индуктивности и транзистора. Второй способ заключается в уменьшении периода переключения системы.
Ток индуктора в преобразователе постоянного тока можно уменьшить за счет увеличения размера индуктора и рабочего цикла, при котором работает система. Рабочий цикл и размер индуктора могут быть изменены до тех пор, пока в индукторе сохраняется одинаковое количество энергии, а затем подается на выход каждый период времени. На рис. 3 показаны три катушки индуктивности (соответственно 1, 2 и 4 Генри), к каждой из которых приложено 1 В, и они заряжаются до тех пор, пока не накопит энергию в 2 Дж. Катушке индуктивности 4H требуется в два раза больше времени или вдвое больше рабочего цикла, чем катушке индуктивности 1H, чтобы зарядиться до того же уровня накопленной энергии в 2 Дж.
На рис. 4 показан ток, протекающий в этих трех катушках индуктивности во время их зарядки. Можно видеть, что для катушки индуктивности 1H требуется ток 2 А, а для катушки индуктивности 4H требуется ток всего 1 А. Это показывает, как выбор катушки индуктивности большего размера и увеличение рабочего цикла преобразователя постоянного тока снижает ток катушки индуктивности.
Рис. 3. Запасенная энергия индуктора.
Рис. 4. Ток дросселя.
Коммутационные потери в преобразователе возникают каждый раз, когда цепь переключается. Эти потери не зависят от тока дросселя и прямо пропорциональны периоду переключения. Следовательно, выгодно использовать самый длинный период переключения, который обеспечивает правильную работу системы. Однако более длительный период переключения требует большего значения индуктивности. Увеличение значения индуктора увеличит сопротивление индуктора постоянному току и может потребовать использования индуктора, который также физически больше.
На рис. 5 показана зависимость эффективности от тока нагрузки для преобразователя постоянного тока с ШИМ-контроллером DS1875. Этот график показывает, что увеличение индуктивности, которое увеличивает рабочий цикл, увеличивает эффективность. Это также показывает, что более длительный период времени привел к более высокой эффективности, поскольку потери переключения были уменьшены. В этом примере преобразователя используется n-канальный полевой транзистор BSSS123 и диод 1N4148. В таблице 1 показаны параметры для двух используемых катушек индуктивности.
В этом примере преобразователя используется n-канальный полевой транзистор BSSS123 и диод 1N4148. В таблице 1 показаны параметры для двух используемых катушек индуктивности.
Рисунок 5. КПД преобразователя постоянного тока, генерирующего 76 В из 3,3 В.
| Индуктивность (мкГн) | Номинальный ток (мА) | Сопротивление постоянному току (Ом) | Размер упаковки (мил) |
| 47 | 390 | 0,67 | 1210 |
| 22 | 175 | 0,44 | 1007 |
Выбор катушки индуктивности, рабочего цикла и периода времени
Первым шагом в настройке повышающего преобразователя является определение желаемого выходного напряжения и максимального тока, необходимого для нагрузки. Доступная энергия от повышающего преобразователя должна быть больше, чем требуемая выходная энергия и все комбинированные потери в цепи. Эффективность преобразователя представлена η. Эффективность от 0,4 до 0,75 является подходящей отправной точкой при расчете компонентов схемы и настроек. Суммарная энергия, необходимая для каждого периода времени, равна:
Доступная энергия от повышающего преобразователя должна быть больше, чем требуемая выходная энергия и все комбинированные потери в цепи. Эффективность преобразователя представлена η. Эффективность от 0,4 до 0,75 является подходящей отправной точкой при расчете компонентов схемы и настроек. Суммарная энергия, необходимая для каждого периода времени, равна:
Уравнивание входной энергии (уравнение 4) и выходной энергии (уравнение 6) и последующее деление обеих частей на T дает уравнение для равенства энергий в системе:
Из уравнения 7 можно рассчитать необходимое значение индуктивности:
Желательно, чтобы преобразователь постоянного тока работал как можно ближе к максимальному рабочему циклу. DS1875 предлагает максимальный рабочий цикл 90%. Правильно настроенная система преобразователя постоянного тока с использованием DS1875 должна иметь рабочий цикл от 80 до 85%. Это максимально уменьшит ток дросселя, но все же оставит дополнительный запас по рабочему циклу, если эффективность будет меньше ожидаемой.
Период времени должен быть как можно дольше, чтобы уменьшить потери при переключении. DS1875 предлагает на выбор четыре различные частоты переключения: 131,25 кГц, 262,5 кГц, 525 кГц и 1050 кГц. При выборе рабочей частоты и катушки индуктивности для преобразователя постоянного тока необходимо учитывать компромисс между более длительным периодом переключения и большей величиной индуктивности.
Пример расчетов для типовых преобразователей постоянного тока
Ниже приведен расчет с использованием системных требований и исходных допущений для определения катушки индуктивности, необходимой для конкретного приложения.
| Требования | Первоначальные предположения |
| В IN = 3,3 В | Д = 80% |
| В ВЫХ = 76 В | Т = 1/262,5 кГц |
| I ВЫХ = 5 мА | η = 0,5 |
Используя формулу в уравнении 8, рассчитывается значение индуктора 17,5 мкГн. Выбрано стандартное значение 15 мкГн. В таблице 2 показаны другие распространенные конфигурации преобразователя постоянного тока, использующие DS1875 в качестве ШИМ-контроллера. В таблице показаны расчетная индуктивность и выбранная частота коммутации. Эта таблица рассчитана с использованием эффективности 50% и целевого рабочего цикла 80%.
Выбрано стандартное значение 15 мкГн. В таблице 2 показаны другие распространенные конфигурации преобразователя постоянного тока, использующие DS1875 в качестве ШИМ-контроллера. В таблице показаны расчетная индуктивность и выбранная частота коммутации. Эта таблица рассчитана с использованием эффективности 50% и целевого рабочего цикла 80%.
| В В (В) | В ВЫХОД (В) | I ВЫХОД (мА) | Частота переключения (кГц) | Индуктор (мкГн) |
| 3,3 | 76 | 5 | 262,5 | 15 |
| 3,3 | 38 | 5 | 525 | 15 |
| 12 | 76 | 5 | 1050 | 56 |
Выбор диода
При выборе диода для преобразователя постоянного тока необходимо учитывать четыре параметра.![]() Во-первых, обратное напряжение пробоя диода должно быть больше напряжения на выходе преобразователя. Во-вторых, диод должен работать с прямым током, который будет проталкиваться через диод катушкой индуктивности. В преобразователе постоянного тока этот ток (I PK ) может составлять несколько сотен миллиампер. В-третьих, чтобы свести к минимуму потери мощности, когда диод открыт, прямое напряжение должно быть как можно меньше. В некоторых приложениях могут даже использоваться диоды Шоттки, поскольку они имеют гораздо более низкое прямое напряжение. Наконец, выбор диода с коротким временем обратного восстановления ограничит выходной заряд, возвращаемый обратно на вход, когда диод переключается с проводящего на непроводящий каскад.
Во-первых, обратное напряжение пробоя диода должно быть больше напряжения на выходе преобразователя. Во-вторых, диод должен работать с прямым током, который будет проталкиваться через диод катушкой индуктивности. В преобразователе постоянного тока этот ток (I PK ) может составлять несколько сотен миллиампер. В-третьих, чтобы свести к минимуму потери мощности, когда диод открыт, прямое напряжение должно быть как можно меньше. В некоторых приложениях могут даже использоваться диоды Шоттки, поскольку они имеют гораздо более низкое прямое напряжение. Наконец, выбор диода с коротким временем обратного восстановления ограничит выходной заряд, возвращаемый обратно на вход, когда диод переключается с проводящего на непроводящий каскад.
Выбор катушки индуктивности
При выборе катушки индуктивности для преобразователя постоянного тока следует учитывать три параметра. Во-первых, наиболее важным параметром является ток насыщения катушки индуктивности. Если ток насыщения катушки индуктивности меньше требуемого пикового тока преобразователя, то преобразователь не сможет обеспечить необходимую выходную мощность. Во-вторых, разработчик должен учитывать сопротивление катушки индуктивности постоянному току. Наконец, следует учитывать физический размер индуктора. Чтобы снизить сопротивление постоянному току, можно рассмотреть индуктор в корпусе большего размера, если физический размер индуктора не является запретительным.
Во-вторых, разработчик должен учитывать сопротивление катушки индуктивности постоянному току. Наконец, следует учитывать физический размер индуктора. Чтобы снизить сопротивление постоянному току, можно рассмотреть индуктор в корпусе большего размера, если физический размер индуктора не является запретительным.
Окончательный выбор катушки индуктивности будет зависеть от основных требований к преобразователю постоянного тока.
Выбор транзистора
Выбранный транзистор должен выдерживать напряжение сток-исток, которое возникает, когда катушка индуктивности разряжается через диод. Номинальный ток стока транзистора должен быть больше пикового тока дросселя. Чтобы свести к минимуму коммутационные потери, оптимальный транзистор также должен иметь малые емкости затвор-исток и сток-исток.
Выбор фильтра пульсаций
Фильтр, состоящий из резисторов R1 и C3, может использоваться для подавления пульсаций. В техническом описании DS1875 описывается, как выбрать эти компоненты.
