Что такое преобразователь частоты и как он работает. Какова структура современного преобразователя частоты. Какие основные виды преобразователей частоты существуют. Каковы преимущества и недостатки разных типов преобразователей частоты.
Что такое преобразователь частоты и для чего он нужен
Преобразователь частоты — это электронное устройство, предназначенное для изменения частоты электрического тока. Основная задача преобразователя частоты — управление скоростью вращения асинхронного или синхронного электродвигателя путем изменения частоты и амплитуды питающего напряжения.
Преобразователи частоты позволяют:
- Плавно регулировать скорость вращения электродвигателя в широком диапазоне
- Снизить пусковые токи и улучшить динамику работы электропривода
- Оптимизировать работу механизмов и технологических процессов
- Экономить электроэнергию за счет регулирования производительности механизмов
Благодаря этим возможностям преобразователи частоты находят широкое применение в различных отраслях промышленности, строительстве, ЖКХ и на транспорте.

Принцип работы и структура преобразователя частоты
Типовая структурная схема современного преобразователя частоты включает следующие основные блоки:
- Выпрямитель — преобразует переменное напряжение сети в постоянное
- Звено постоянного тока — сглаживает пульсации выпрямленного напряжения
- Инвертор — преобразует постоянное напряжение в переменное регулируемой частоты
- Система управления — формирует сигналы управления силовыми ключами инвертора
Принцип работы преобразователя частоты заключается в двойном преобразовании электроэнергии:
- Входное переменное напряжение сети выпрямляется в постоянное
- Постоянное напряжение с помощью инвертора преобразуется в переменное напряжение нужной частоты и амплитуды
За счет изменения частоты и напряжения на выходе инвертора осуществляется управление скоростью и моментом электродвигателя.
Основные виды преобразователей частоты
По принципу работы силовой части преобразователи частоты делятся на два основных класса:
1. Преобразователи с промежуточным звеном постоянного тока
Это наиболее распространенный тип. В них входное напряжение сначала выпрямляется, а затем инвертируется в переменное нужной частоты. Подразделяются на:

- Преобразователи с автономным инвертором напряжения (АИН)
- Преобразователи с автономным инвертором тока (АИТ)
2. Преобразователи с непосредственной связью
В них выходное напряжение формируется из участков синусоид входного напряжения. Отличаются простотой, но имеют ограниченный диапазон регулирования частоты.
Преобразователи с автономным инвертором напряжения
Преобразователи с АИН получили наибольшее распространение благодаря ряду преимуществ:
- Широкий диапазон регулирования частоты (от 0 до 400 Гц и выше)
- Высокий КПД (до 98%)
- Возможность рекуперации энергии в сеть
- Простота реализации векторного управления двигателем
В качестве силовых ключей в современных АИН используются IGBT-транзисторы, обладающие высоким быстродействием и малыми потерями.
Многоуровневые преобразователи частоты
Для повышения мощности и улучшения качества выходного напряжения применяются многоуровневые топологии инверторов. Основные виды:
- Трехуровневые инверторы с фиксированной нейтральной точкой
- Каскадные многоуровневые инверторы на Н-мостах
- Инверторы с плавающими конденсаторами
Многоуровневые преобразователи позволяют работать на более высоких напряжениях при использовании стандартных низковольтных компонентов. Это делает их перспективными для применения в мощных высоковольтных электроприводах.

Способы управления преобразователями частоты
Основные методы управления, применяемые в современных преобразователях частоты:
- Скалярное управление (U/f)
- Векторное управление без датчика
- Векторное управление с датчиком скорости/положения
- Прямое управление моментом
Выбор способа управления зависит от требований к динамике привода, диапазону регулирования скорости и точности поддержания момента.
Преимущества и недостатки разных типов преобразователей
Преобразователи с АИН:
- Преимущества: широкий диапазон регулирования, высокий КПД, низкий уровень гармоник
- Недостатки: сложность схемы управления, высокая стоимость
Преобразователи с АИТ:
- Преимущества: естественная коммутация тиристоров, работа на длинную линию
- Недостатки: сложность реализации рекуперации, низкое качество выходного тока
Преобразователи с непосредственной связью:
- Преимущества: простота схемы, высокий КПД
- Недостатки: узкий диапазон регулирования частоты, низкое качество выходного напряжения
Применение преобразователей частоты
Основные области применения преобразователей частоты:

- Насосы и вентиляторы
- Конвейеры и транспортеры
- Станки и промышленные роботы
- Лифты и подъемники
- Экструдеры и мешалки
- Электротранспорт
Применение преобразователей частоты позволяет значительно повысить энергоэффективность технологических процессов и снизить эксплуатационные расходы.
Перспективы развития преобразователей частоты
Основные направления совершенствования преобразователей частоты:
- Применение новых типов силовых полупроводников (SiC, GaN)
- Развитие многоуровневых топологий инверторов
- Совершенствование алгоритмов управления
- Повышение степени интеграции и миниатюризация
- Расширение функциональных возможностей
Это позволит создавать более эффективные, компактные и надежные преобразователи частоты для различных применений.
Частотные преобразователи — структура, принцип работы
Внимание! Приведенная ниже информация носит теоретический характер. Если Вам необходимо решить конкретную задачу или разобраться как и какое оборудование следует применить в Вашем случае, воспользуйтесь бесплатной консультацией связавшись с нами одним из указанных вверху данной страницы или на странице «Контакты» способов, либо заполните опросный лист. Инженер службы технической поддержки направит Вам рекомендации на указанный Вами адрес электронной почты.
Частотные преобразователи – это устройства, предназначенные для преобразования переменного тока (напряжения) одной частоты в переменный ток (напряжение) другой частоты.
Выходная частота в современных преобразователях может изменяться в широком диапазоне и быть как выше, так и ниже частоты питающей сети.
Схема любого преобразователя частоты состоит из силовой и управляющей частей. Силовая часть обычно выполнена на тиристорах или транзисторах, которые работают в режиме электронных ключей. Управляющая часть выполняется на цифровых микропроцессорах и обеспечивает управление силовыми электронными ключами, а также решение большого количества вспомогательных задач (контроль, диагностика, защита).
Частотные преобразователи, применяемые в регулируемом электроприводе, в зависимости от структуры и принципа работы силовой части разделяются на два класса:
- С явно выраженным промежуточным звеном постоянного тока.
- С с непосредственной связью (без промежуточного звена постоянного тока).
- Практически самый высокий КПД относительно других преобразователей (98,5% и выше).
- Способность работать с большими напряжениями и токами, что делает возможным их использование в мощных высоковольтных приводах, относительная дешевизна, несмотря на увеличение абсолютной стоимости за счет схем управления и дополнительного оборудования.
Каждый из существующих классов имеет свои достоинства и недостатки, которые определяют область рационального применения каждого из них.
Исторически первыми появились преобразователи с непосредственной связью (рис. 4.), в которых силовая часть представляет собой управляемый выпрямитель и выполнена на не запираемых тиристорах. Система управления поочередно отпирает группы тиристоров и подключает статорные обмотки двигателя к питающей сети.
Таким образом, выходное напряжение преобразователя формируется из «вырезанных» участков синусоид входного напряжения. На рис.5. показан пример формирования выходного напряжения для одной из фаз нагрузки. На входе выигрывают у тиристорных действует трехфазное синусоидальное напряжение uа, uв, uс. Выходное напряжение uвых имеет несинусоидальную «пилообразную» форму, которую условно можно аппроксимировать синусоидой (утолщенная линия). Из рисунка видно, что частота выходного напряжения не может быть равна или выше частоты питающей сети. Она находится в диапазоне от 0 до 30 Гц. Как следствие малый диапазон управления частоты вращения двигателя (не более 1: 10). Это ограничение не позволяет применять такие преобразователи в современных частотно регулируемых приводах с широким диапазоном регулирования технологических параметров.
Использование не запираемых тиристоров требует относительно сложных систем управления, которые увеличивают стоимость преобразователя.
«Резаная» синусоида на выходе преобразователя является источником высших гармоник, которые вызывают дополнительные потери в электрическом двигателе, перегрев электрической машины, снижение момента, очень сильные помехи в питающей сети. Применение компенсирующих устройств приводит к повышению стоимости, массы, габаритов, понижению к.п.д. системы в целом.
Наряду с перечисленными недостатками преобразователей с непосредственной связью, они имеют определенные достоинства. К ним относятся:
Подобные схемы преобразователей используются в старых приводах и новые конструкции их практически не разрабатываются.
Наиболее широкое применение в современных частотно регулируемых приводах находят частотники с явно выраженным звеном постоянного тока (рис. 6.)
В частотных преобразователях этого класса используется двойное преобразование электрической энергии: входное синусоидальное напряжение с постоянной амплитудой и частотой выпрямляется в выпрямителе (В), фильтруется фильтром (Ф), сглаживается, а затем вновь преобразуется инвертором (И) в переменное напряжение изменяемой частоты и амплитуды. Двойное преобразование энергии приводит к снижению к.п.д. и к некоторому ухудшению массогабаритных показателей по отношению к преобразователям с непосредственной связью.
Для формирования синусоидального переменного напряжения используются автономные инверторы напряжения и автономные инверторы тока.
В качестве электронных ключей в инверторах применяются запираемые тиристоры GTO и их усовершенствованные модификации GCT, IGCT, SGCT, и биполярные транзисторы с изолированным затвором IGBT.
Главным достоинством тиристорных преобразователей частоты, как и в схеме с непосредственной связью, является способность работать с большими токами и напряжениями, выдерживая при этом продолжительную нагрузку и импульсные воздействия.
Они имеют более высокий КПД (до 98%) по отношению к преобразователям на IGBT транзисторах (95 – 98%).
Преобразователи частоты на тиристорах в настоящее время занимают доминирующее положение в высоковольтном приводе в диапазоне мощностей от сотен киловатт и до десятков мегаватт с выходным напряжением 3 — 10 кВ и выше. Однако их цена на один кВт выходной мощности самая большая в классе высоковольтных преобразователей.
До недавнего прошлого преобразователи частоты на GTO составляли основную долю и в низковольтном частотно регулируемом приводе. Но с появлением IGBT транзисторов произошел «естественный отбор» и сегодня преобразователи на их базе общепризнанные лидеры в области низковольтного частотно регулируемого привода.
Тиристор является полууправляемым приборам: для его включения достаточно подать короткий импульс на управляющий вывод, но для выключения необходимо либо приложить к нему обратное напряжение, либо снизить коммутируемый ток до нуля. Для этого в тиристорном преобразователе частоты требуется сложная и громоздкая система управления.
Биполярные транзисторы с изолированным затвором IGBT отличают от тиристоров полная управляемость, простая не энергоемкая система управления, самая высокая рабочая частота.
Вследствие этого преобразователи частоты на IGBT позволяют расширить диапазон управления скорости вращения двигателя, повысить быстродействие привода в целом.
Для асинхронного электропривода с векторным управлением преобразователи на IGBT позволяют работать на низких скоростях без датчика обратной связи.
Применение IGBT с более высокой частотой переключения в совокупности с микропроцессорной системой управления в частотных преобразователях снижает уровень высших гармоник, характерных для тиристорных преобразователей. Как следствие меньшие добавочные потери в обмотках и магнитопроводе электродвигателя, уменьшение нагрева электрической машины, снижение пульсаций момента и исключение так называемого «шагания» ротора в области малых частот. Снижаются потери в трансформаторах, конденсаторных батареях, увеличивается их срок службы и изоляции проводов, уменьшаются количество ложных срабатываний устройств защиты и погрешности индукционных измерительных приборов.
Частотные преобразователи на транзисторах IGBT по сравнению с тиристорными преобразователями при одинаковой выходной мощности отличаются меньшими габаритами, массой, повышенной надежностью в силу модульного исполнения электронных ключей, лучшего теплоотвода с поверхности модуля и меньшего количества конструктивных элементов.
Они позволяют реализовать более полную защиту от бросков тока и от перенапряжения, что существенно снижает вероятность отказов и повреждений электропривода.
На настоящий момент низковольтные преобразователи на IGBT имеют более высокую цену на единицу выходной мощности, вследствие относительной сложности производства транзисторных модулей. Однако по соотношению цена/качество, исходя из перечисленных достоинств, они явно выигрывают у тиристорных, кроме того, на протяжении последних лет наблюдается неуклонное снижение цен на IGBT модули.
Главным препятствием на пути их использования в высоковольтном приводе с прямым преобразованием частоты и при мощностях выше 1 – 2 МВт на настоящий момент являются технологические ограничения. Увеличение коммутируемого напряжения и рабочего тока приводит к увеличению размеров транзисторного модуля, а также требует более эффективного отвода тепла от кремниевого кристалла.
Новые технологии производства биполярных транзисторов направлены на преодоление этих ограничений, и перспективность применения IGBT очень высока также и в высоковольтном приводе. В настоящее время IGBT транзисторы применяются в высоковольтных преобразователях в виде последовательно соединенных нескольких единичных модулей.
Структура и принцип работы низковольтного преобразователя частоты на IGBT транзисторах
Типовая схема низковольтного преобразователя частоты представлена на рис. 7. В нижней части рисунка изображены графики напряжений и токов на выходе каждого элемента инвертора.
Переменное напряжение питающей сети (uвх.)с постоянной амплитудой и частотой (U вх = const, f вх = const) поступает на управляемый или неуправляемый выпрямитель (1).
Для сглаживания пульсаций выпрямленного напряжения (uвыпр.) используется фильтр (2). Выпрямитель и емкостный фильтр (2) образуют звено постоянного тока.
С выхода фильтра постоянное напряжение u d поступает на вход автономного импульсного инвертора (3).
Автономный инвертор современных низковольтных преобразователей, как было отмечено, выполняется на основе силовых биполярных транзисторов с изолированным затвором IGBT. На рассматриваемом рисунке изображена схема преобразователя частоты с автономным инвертором напряжения как получившая наибольшее распространение.
В инверторе осуществляется преобразование постоянного напряжения ud в трехфазное (или однофазное) импульсное напряжение u и изменяемой амплитуды и частоты. По сигналам системы управления каждая обмотка электрического двигателя подсоединяется через соответствующие силовые транзисторы инвертора к положительному и отрицательному полюсам звена постоянного тока. Длительность подключения каждой обмотки в пределах периода следования импульсов модулируется по синусоидальному закону. Наибольшая ширина импульсов обеспечивается в середине полупериода, а к началу и концу полупериода уменьшается. Таким образом, система управления обеспечивает широтно-импульсную модуляцию (ШИМ) напряжения, прикладываемого к обмоткам двигателя.Амплитуда и частота напряжения определяются параметрами модулирующей синусоидальной функции.
При высокой несущей частоте ШИМ (2 … 15 кГц) обмотки двигателя вследствие их высокой индуктивности работают как фильтр. Поэтому в них протекают практически синусоидальные токи.
В схемах преобразователей с управляемым выпрямителем (1) изменение амплитуды напряжения uи может достигаться регулированием величины постоянного напряжения ud, а изменение частоты – режимом работы инвертора.
При необходимости на выходе автономного инвертора устанавливается фильтр (4) для сглаживания пульсаций тока. (В схемах преобразователей на IGBT в силу низкого уровня высших гармоник в выходном напряжении потребность в фильтре практически отсутствует.)
Таким образом, на выходе преобразователя частоты формируется трехфазное (или однофазное) переменное напряжение изменяемой частоты и амплитуды (вых = var, f вых = var).
Сделать заказ на частотный преобразователь
Частотный преобразователь
Дмитрий Левкин
Частотный преобразователь, или преобразователь частоты — электротехническое устройство (система управления), используемое для контроля скорости и/или момента двигателей переменного тока путем изменения частоты и напряжения питания электродвигателя.Согласно ГОСТ 23414-84 полупроводниковый преобразователь частоты — полупроводниковый преобразователь переменного тока, осуществляющий преобразование переменного тока одной частоты в переменный ток другой частоты
Частотный преобразователь — это устройство, используемое для того чтобы обеспечить непрерывное управление процессом. Обычно частотный преобразователь способен управлять скоростью и моментом асинхронных и/или синхронных двигателей.

Частотный преобразователь небольшой мощности

Высоковольтный преобразователь
Преобразователи частоты находят все более широкое применение в различных приложениях промышленности и транспорта. Благодаря развитию силовых полупроводниковых элементов, инверторы напряжения и инверторы тока с ШИМ управлением получают все более широкое распространение. Устройства, которые преобразуют постоянный сигнал в переменный, с желаемым напряжением и частотой, называются инверторами. Такое преобразование может быть осуществлено с помощью электронных ключей (BJT, MOSFET, IGBT, MCT, SIT, GTO) и тиристоров в зависимости от задачи.
На данный момент основная часть всей производимой электрической энергии в мире используется для работы электрических двигателей. Преобразование электрической мощности в механическую мощность осуществляется с помощью электродвигателей мощностью от меньше ватта до нескольких десятков мегаватт.
- Современные электроприводы должны отвечать различным требованиям таким как:
- максимальный КПД;
- широкий диапазон плавной установки скорости вращения, момента, ускорения, угла и линейного положения;
- быстрое удаление ошибок при изменении управляющих сигналов и/или помех;
- максимальное использование мощности двигателя во время сниженного напряжения или тока;
- надежность, интуитивное управление.
Основными элементами частотного преобразователя являются силовая часть (преобразователь электрической энергии) и управляющее устройство (контроллер). Современные частотные преобразователи обычно имеют модульную архитектуру, что позволяет расширять возможности устройства. Также зачастую имеется возможность установки дополнительных интерфейсных модулей и модулей расширения каналов ввода/вывода.


Функциональная схема частотного преобразователя
На микроконтроллере частотного преобразователя выполняется программное обеспечение, которое управляет основными параметрами электродвигателя (скоростью и моментом). Основные методы управления бесщеточными двигателями, используемые в частотных преобразователях представлены в таблице ниже.
Характеристики основных способов управления электродвигателями используемых в частотных преобразователях [3]Примечание:
- Без обратной связи.
- С обратной связью.
- В установившемся режиме
Широкое развитие силовых электрических преобразователей в последние десятилетия привело к увеличению количества исследований в области модуляции. Метод модуляции непосредственно влияет на эффективность всей энергосистемы (силовой части, системы управления), определяя экономическую выгоду и производительность конечного продукта.
Главная цель методов модуляции – добиться лучшей формы сигналов (напряжений и токов) с минимальными потерями. Другие второстепенные задачи управления могут быть решены посредством использования правильного способа модуляции, такие как уменьшение синфазной помехи, выравнивание постоянного напряжения, уменьшение пульсаций входного тока, снижение скорости нарастания напряжения. Одновременное достижение всех целей управления невозможно, необходим компромисс. Каждая схема силового преобразователя и каждое приложение должны быть глубоко изучены для определения наиболее подходящего метода модуляции.
- Методы модуляции можно разделить на четыре основные группы:
- ШИМ — широтно-импульсная модуляция
- ПВМ — пространственно-векторная модуляция
- гармоническая модуляция
- методы переключения переменной частоты
Корни силовой электроники уходят к 1901 году, когда П.К. Хьюитт изобрел ртутный вентиль. Однако современная эра полупроводниковой силовой электроники началась с коммерческого представления управляемого кремниевого выпрямителя (тиристора) компанией General Electric в 1958 году. Затем развитие продолжалось в области новых полупроводниковых структур, материалов и в производстве, давая рынку много новых устройств с более высокой мощностью и улучшенными характеристиками. Сегодня силовая электроника строится на металл-оксид-полупроводниковых полевых транзисторах (MOSFET — metal-oxide-semiconductor field-effect transistor) и биполярных транзисторах с изолированным затвором (IGBT — Insulated-gate bipolar transistors), а для диапазона очень высоких мощностей — на тиристорах с интегрированным управлением (IGCT – Integrated gate-commutated thyristor). Также сейчас доступны интегрированные силовые модули. Новая эра высоковольтных, высокочастотных и высокотемпературных технологий открывается многообещающими полупроводниковыми устройствами, основанными на широкой запрещенной зоне карбида кремния (SiC). Новые силовые полупроводниковые устройства всегда инициируют развитие новых топологий преобразователей [3].
Инвертор напряжения
Инвертор напряжения наиболее распространен среди силовых преобразователей.
Двухуровневый инвертор напряжения
Двухуровневый инвертор напряжения (two-level voltage-source inverter) – наиболее широко применяемая топология преобразователя энергии. Он состоит из конденсатора и двух силовых полупроводниковых ключей на фазу. Управляющий сигнал для верхнего и нижнего силовых ключей связан и генерирует только два возможных состояния выходного напряжения (нагрузка соединяется с положительной или отрицательной шиной источника постоянного напряжения).

Схема двухуровневого инвертора напряжения

Фазное напряжение двухуровневого инвертора напряжения
Используя методы модуляции для генерирования управляющих импульсов возможно синтезировать выходное напряжение с желаемыми параметрами (формой, частотой, амплитудой). Из-за содержания высоких гармоник в выходном сигнале для генерирования синусоидальных токов выходной сигнал необходимо фильтровать, но так как данные преобразователи обычно имеют индуктивную нагрузку (электродвигатели) дополнительные фильтры используются только при необходимости.
Максимальное выходное напряжение определяется значением постоянного напряжения звена постоянного тока. Для эффективного управления мощной нагрузкой требуется высокое постоянное напряжение звена постоянного тока, но на практике это напряжение ограничено максимальным рабочим напряжением полупроводников. Для примера низковольтные IGBT транзисторы обеспечивают выходное напряжение до 690 В. Для того чтобы обойти данное ограничение по напряжению в последние десятилетия были разработаны схемы многоуровневых преобразователей. Данные преобразователи сложнее, чем двухуровневые в плане топологии, модуляции и управления, но при этом имеют лучшие показатели по мощности, надежности, габаритам, производительности и эффективности.
Трехуровневый преобразователь с фиксированной нейтральной точкой
В трехуровневом преобразователе с фиксированной нейтральной точкой (three-level neutral point clamped converter) постоянное напряжение делится поровну посредством двух конденсаторов, поэтому фаза может быть подключена к линии положительного напряжения (посредством включения двух верхних ключей), к средней точке (посредством включения двух центральных ключей) или к линии отрицательного напряжения (посредством включения двух нижних ключей). Каждому ключу в данном случае требуется блокировать только половину напряжения звена постоянного тока, тем самым позволяя увеличить мощность устройства, используя те же самые полупроводниковые ключи, как и в обычном двухуровневом преобразователе. В данном преобразователе обычно используются высоковольтные IGBT транзисторы и IGCT тиристоры.

Схема трехуровневого преобразователя с фиксированной нейтральной точкой
- Недостатками данных преобразователей являются:
- Дисбаланс конденсаторов, создающий асимметрию в преобразователе. Данную проблему предлагается решать путем изменения метода модуляции.
- Неравное распределение потерь из-за того, что потери на переключение внешних и центральных ключей отличаются в зависимости от режима работы. Данная проблема не может быть решена с использованием обычной схемы, поэтому была предложена измененная топология – активный преобразователь со связанной нейтральной точкой (active NPC). В этой схеме диоды заменены управляемыми ключами. Таким образом, выбирая соответствующую комбинацию ключей, возможно уменьшить и равномерно распределить потери.
- ГОСТ Р 50369-92 Электроприводы. Термины и определения.
- Rahul Dixit, Bindeshwar Singh, Nupur Mittal. Adjustable speeds drives: Review on different inverter topologies.- Sultanpur, India.:International Journal of Reviews in Computing, 2012.
- Marian P. Kazmierkowski, Leopoldo G. Franquelo, Jose Rodriguez, Marcelo A. Perez, Jose I. Leon, «High-Performance Motor Drives», IEEE Industrial Electronicsd, vol. 5, no. 3, pp. 6-26, Sep.2011.

Фазное напряжение трехуровневого преобразователя с фиксированной нейтральной точкой
Преобразователь с фиксированной нейтральной точкой может масштабироваться для достижения больше чем трех уровней выходного сигнала путем деления напряжения звена постоянного тока более чем на два значения посредством конденсаторов. Каждое из этих деленных напряжений может быть подключено к нагрузке с использованием расширенного набора ключей и ограничительных диодов. Вместе с увеличением мощности преимуществами многоуровневого преобразователя является лучшее качество электроэнергии, меньшее значение скорости нарастания напряжения (dv/dt) и связанных электромагнитных помех. Однако, когда преобразователь со связанной нейтральной точкой имеет более трех уровней, появляются другие проблемы. С точки зрения схемотехники в таком случае ограничительные диоды требуют более высокое максимальное рабочее напряжение чем основные ключи, что требует использования различных технологий или нескольких ограничительных диодов соединенных последовательно. В дополнение становится критическим неравномерное использование силовых элементов в схеме. В итоге из-за увеличения количества элементов снижается надежность. Приведенные недостатки ограничивают использование преобразователей с фиксированной нейтральной точкой с более чем тремя уровнями в промышленных приложениях.
Многоуровневые преобразователи
Каскадные преобразователи основанные на модульных силовых ячейках со схемой H-мост (cascaded H-bridge — CHB) и преобразователи с плавающими конденсаторами (flying capacitor converter) были предложены для обеспечения большего количества уровней выходного напряжения в сравнении с преобразователями с фиксированной нейтральной точкой.
Каскадный Н-мостовой преобразователь
Каскадный преобразователь — высоко модульный преобразователь, состоящий из нескольких однофазных инверторов, обычно называемыми силовыми ячейками, соединенными последовательно для формирования фазы. Каждая силовая ячейка выполнена на стандартных низковольтных компонентах, что обеспечивает их легкую и дешевую замену в случае выхода из строя.

Схема каскадного преобразователя
Основным преимуществом данного преобразователя является использование только низковольтных компонентов, при этом он дает возможность управлять мощной нагрузкой среднего диапазона напряжения. Несмотря на то что частота коммутации в каждой ячейке низкая, эквивалентная частота коммутации приложенная к нагрузке – высокая, что уменьшает потери на переключение ключей, дает низкую скорость нарастания напряжения (dv/dt) и помогает избежать резонансов.

Фазное напряжение каскадного преобразователя
Преобразователь с плавающими конденсаторами
Выходное напряжение преобразователя с плавающими конденсаторами получается путем прямого соединения выхода фазы с положительной, отрицательной шиной или подключением через конденсаторы. Количество уровней выходных напряжений зависит от количества навесных конденсаторов и отношения между различными напряжениями.

Схема преобразователя с плавающими конденсаторами
Этот преобразователь, как и в случае каскадного преобразователя, также имеет модульную топологию, где каждая ячейка состоит из конденсатора и двух связанных ключей. Однако, в отличие от каскадного преобразователя добавление дополнительных силовых ключей к конденсаторному преобразователю не увеличивает номинальную мощность преобразователя, а только уменьшает скорость нарастания напряжения (dv/dt), улучшая коэффициент гармоник выходного сигнала. Как и у каскадного преобразователя, модульность уменьшает стоимость замены элементов, облегчает поддержку и позволяет реализовать отказоустойчивую работу.

Фазное напряжение преобразователя с плавающими конденсаторами
Конденсаторный преобразователь требует только один источник постоянного тока для питания всех ячеек и фаз. Поэтому, можно обойтись без входного трансформатора, а количество ячеек может быть произвольно увеличено в зависимости от требуемой выходной мощности. Подобно преобразователю с фиксированной нейтральной точкой, этому преобразователю требуется специальный алгоритм управления для регулирования напряжения на конденсаторах.
Инвертор тока
Для работы инвертору тока всегда требуется управляемый выпрямитель, чтобы обеспечить постоянный ток в звене постоянного тока. В стандартной топологии обычно используются тиристорные выпрямители. Чтобы уменьшить помехи в нагрузке, в звене постоянного тока используется расщепленная индуктивность. Инвертор тока имеет схему силовых ключей наподобие инвертора напряжения, но в качестве силовых ключей используются тиристоры с интегрированным управлением (IGCT). Выходной ток имеет форму ШИМ и не может быть напрямую приложен к индуктивной нагрузке (электродвигателю), поэтому инвертор тока обязательно включает выходной емкостной фильтр, который сглаживает ток и выдает гладкое напряжение на нагрузку. Этот преобразователь может быть реализован для работы на средних напряжениях и более того он по природе имеет возможность рекуперации энергии.

Схема инвертора тока с выпрямителем
Прямые преобразователи
Прямые преобразователи передают энергию прямо от входа к выходу без использования элементов накопления энергии. Основным преимуществом таких преобразователей является меньшие габариты. Недостатком – необходимость более сложной схемы управления.
Циклоконвертер относится к категории прямых преобразователей. Данный преобразователь широко использовался в приложениях требующих высокую мощность. Этот конвертер состоит из двойных тиристорных преобразователей на фазу, который может генерировать изменяемое постоянное напряжение, контролируемое таким образом, чтобы следовать опорному синусоидальному сигналу. Вход каждого преобразователя питается от фозосмещающего трансформатора, где устраняются гармоники входного тока низкого порядка. Выходное напряжение является результатом комбинации сегментов входного напряжения в котором основная гармоника следует за опорным сигналом. По своей природе данный преобразователь хорошо подходит для управления низкочастотными мощными нагрузками.

Схема циклоконвертера
Матричный преобразователь в его прямой и непрямой версии также принадлежит к категории прямых преобразователей. Основной принцип работы прямого матричного преобразователя (direct matrix converter) — возможность соединения выходной фазы к любому из входных напряжений. Преобразователь состоит из девяти двунаправленных ключей, которые могут соединить любую входную фазу с любой выходной фазой, позволяя току течь в обоих направлениях. Для улучшения входного тока требуется индуктивно-емкостной фильтр второго порядка. Выход напрямую соединяется с индуктивной нагрузкой. Не все доступные комбинации ключей возможны, они ограничены только 27 правильными состояниями коммутации. Как говорилось ранее, основное преимущество матричных преобразователей — меньшие габариты, что важно для автомобильных и авиационных приложений.

Схема прямого матричного преобразователя
Непрямой матричный преобразователь (indirect matrix converter) состоит из двунаправленного трехфазного выпрямителя, виртуального звена постоянного тока и трехфазного инвертора. Количество силовых полупроводников такое же как у прямых матричных преобразователей (если двунаправленный ключ рассматривается как два однонаправленных ключа), но количество возможных состояний включения отличается. Используя ту же самую конфигурацию непрямого матричного преобразователя, возможно упростить его топологию и уменьшить количество элементов ограничив его работу от положительного напряжения в виртуальном звене постоянного тока. Уменьшенная топология называется разреженный матричный преобразователь (sparse matrix converter).

Схема непрямого матричного преобразователя

Схема разреженного матричного преобразователя
Библиографический список
Преобразователи частоты (ПЧ) — Студопедия
Осуществляют преобразование электроэнергии переменного тока одной частоты в переменный ток другой частоты. Работа преобразователя и его характеристики в основном определяются схемой преобразователя.
От схемы преобразователя непосредственно зависят:
¾ параметры выходного напряжения;
¾ коэффициент мощности по входу и выходу;
¾ форма кривой тока, потребляемого из сети;
¾ внешняя (нагрузочная) характеристика;
¾ к.п.д.
При классификации ПЧ выделяют два основных класса:
1. Преобразователи с промежуточным звеном постоянного тока;
2. Преобразователи с непосредственной связью питающей сети и цепей нагрузки.
Преобразователи с непосредственной связью подразделяются на преобразователи с естественной коммутацией тиристоров и с искусственной коммутацией.
5.1. Преобразователи с промежуточным звеном постоянного тока.
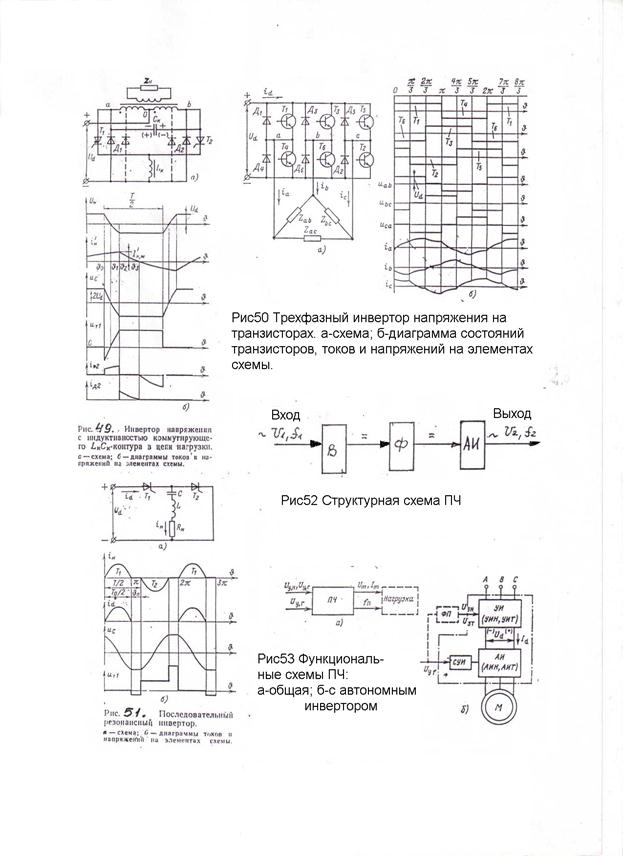
Структурная и функциональная схемы ПЧ приведены на рисунке 52, 53.
В преобразователях данного класса частота выходного напряжения не зависит от частоты питающей сети и может быть как больше, так и меньше этой частоты.
Выпрямитель В обычно выполняется по трехфазной мостовой схеме, на выходе обычно устанавливают фильтр Ф.
Если звено АИ выполнено по схеме автономного инвертора напряжения, то необходимость в фильтре обусловлена также особенностью работы инвертора напряжения на активно-индуктивную нагрузку. При такой нагрузке должен происходить возврат энергии, накопленной в индуктивностях нагрузки, в источник постоянного тока через обратные диоды. Если выпрямитель обладает односторонней проводимостью, то функции приёмника возвращаемой энергии выполняет фильтр, имеющий в таком случае емкостной выход.
Если звено АИ выполнено по схеме инвертора тока, то фильтр Ф должен иметь индуктивный выход для обеспечения непрерывности инвертируемого тока.
В ПЧ с регулируемой в широком диапазоне частотой выходного напряжения, предназначенных для питания АД, звено АИ выполняется по схеме инвертора напряжения.
В ПЧ управлению подлежат две выходные координаты – амплитуда напряжения или тока нагрузки Um, Im и частота изменения напряжения или тока fп (рис.53,а). Соответственно двум выходным координатам, ПЧ располагает двумя входными координатами – напряжением управления напряжением или током Uу,н ; UуТ и напряжением управления частотой Uу,f(рис.53,а).
На рисунке 53,б изображена функциональная схема ПЧ с автономным инвертором АИ (ПЧ с промежуточным звеном постоянного тока).
Регулирование частоты выходных напряжений или тока ПЧ осуществляется инвертором. Функциональная схема системы управления показана на рисунке 54.
Схема включает в свой состав: задающий генератор ЗГ, преобразующий аналоговый сигнал управления Uу,f в колебания прямоугольной формы с частотой fЗГ, распределитель импульсов РИ, преобразующий колебания ЗГ в синхронизированную по частоте и фазе трёхфазную систему импульсов и распределяющий импульсы по шести каналам управления тиристорами инвертора. Формирователь управляющего импульса ВИ, формирующий импульс управления тиристором по длительности, форме и мощности.
АИ функционально отличается от выпрямителя только направлением преобразования. Напряжение или ток цепи постоянного тока преобразуется в трёхфазную систему переменного тока. Открывающие импульсы поступают на вентильную группу с фазовым сдвигом 600 относительно один другого.
В отличие от УИ, в котором интервал проводимости λ = 1200, в АИ этот интервал в принципе может изменяться в пределах 0 < λ ≤ 1800.
Это объясняются различием в процессах коммутации тиристоров в УИ и АИ.
УИ – преобразователь с естественной коммутацией, поэтому в трёхфазной схеме в режиме непрерывных токов λ = 1200 = const.
АИ – преобразователь с искусственной коммутацией. В инверторах реализуется продолжительность открытого состояния тиристоров λ = 1200, 1500 и 1800.
Выходной мгновенный ток iПв АИТ или мгновенная э.д.с. lu в АИН имеет две формы: прямоугольную и пирамидальную.
5.2. Преобразователи с непосредственной связью (НПЧ).
Данный класс ПЧ характеризуется однократным преобразованием энергии. В структурном отношении НПЧ прост, его основу составляет реверсивный УИ постоянного тока.
Число фаз входного и выходного напряжение НПЧ является весьма существенным признаком их классификации, т.к. оно в значительной мере определяет структуру построения схемы преобразователя.
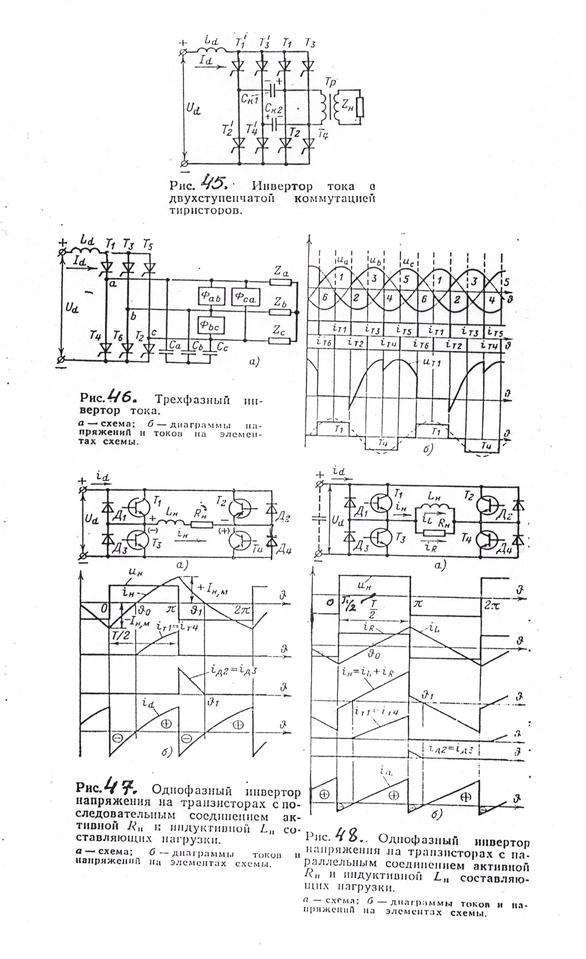
Рассмотрим принцип работы НПЧ с естественной коммутацией на примере трехфазно-однофазной схемы ( рис. 77, а).
В схеме две группы тиристоров: группа I – катодная (Т1, Т2, Т3) и группа II – анодная (Т4, Т5, Т6). Допустим, что нагрузка ZН – активная.
Когда отпирающие импульсы подаются последовательно на тиристоры Т1, Т2, Т3 катодной группы, она работает в режиме выпрямления, по трехфазной схеме со средней точкой, формируя на нагрузке положительную полуволну напряжения относительно нулевого вывода трансформатора.
Импульсы поступают на тиристоры со сдвигом относительно линейных напряжений питающей сети на угол α.
При работе тиристоров Т4, Т5, Т6 анодной группы на нагрузке относительно нулевого вывода трансформатора формируется отрицательная полуволна напряжения.
В результате циклической работы групп I и II на нагрузке создаётся переменное напряжение с частотой основной гармоники f2, более низкой, чем частота питающей сети f1.
Для исключения постоянной составляющей в напряжении на нагрузке, времена работы анодной и катодной группы должны быть равны между собой.
На рисунке 77,б представлена диаграмма выходного напряжения. Тиристоры катодной группы вступают в работу только после спадания до нуля полуволны напряжения, формируемой анодной группой, и наоборот, т.к. нагрузка активна.
Тиристоры каждой группы коммутируют между собой через интервал времени π / 3.
Поэтому без учёта интервала коммутации длительность одной полуволны выходного напряжения:
 ,
,
где n – число участков синусоид в полуволне;
 — угол, обусловленный спаданием до нуля заднего фронта полуволны выходного напряжения.
— угол, обусловленный спаданием до нуля заднего фронта полуволны выходного напряжения.
В общем случае при числе фаз питающей сети m1, связь частот выходного и входного напряжения выражается соотношением  .
.
Итак, частота выходного напряжения f2 может принимать только дискретные значения при изменении числа n = 1, 2, 3,…
Для обеспечения плавного изменения частоты необходима пауза φП между окончанием работы предыдущей группы и началом работы последующей группы. В этом случае связь частот f1 и f2 будет определяться соотношением  .
.
При активно-индуктивной нагрузке моменты прохождения через нуль выходного напряжения не соответствуют нулевым значениям токов нагрузки.
Для обеспечения протекания тока из цепи нагрузки в питающую сеть, соответствующую тиристорную группу переводят в инверторный режим.
Например, если группа I работала в выпрямительном режиме с углом α, то, начиная с определённого момента, импульсы группы I начинают поступать со сдвигом относительно напряжений питающей сети на угол β в сторону опережения.
В результате инверторного режима работы части тиристоров группы I происходит возврат в сеть энергии, накопленной в индуктивности, и спадание тока нагрузки до нуля.
Затем обеспечивается пауза φП, после которой начинает работать в выпрямительном режиме группа II, часть тиристоров которых в заданный момент переходят в инверторный режим. Далее рассмотренные процессы периодически повторяются.
Для получения на выходе НПЧ напряжения более высокой частоты, чем частота сети, прибегают к искусственной коммутации тиристоров. На рисунке 78 представлена схема трёхфазно-однофазного НПЧ с искусственной коммутацией, осуществляемой конденсатором СК, установленного на выходе преобразователя.
Ток нагрузки попеременно проводят тиристоры групп I, II и III, IV.
Внутригрупповая коммутация тиристоров, например Т1А, Т1В, Т1С группы I, происходит под воздействием напряжения сети.
Конденсатор СК позволяет практически мгновенно произвести коммутацию между группами тиристоров (межгрупповую коммутацию) и тем самым изменить полярность тока в нагрузке.
НПЧ с искусственной коммутацией тиристоров обладают худшими показателями по сравнению с ПЧ с промежуточным звеном постоянного тока.
5.3. Современные ПЧ в электроприводе.
ПЧ (инверторы) служат для плавного регулирования скорости трёхфазного АД. Это позволяет отказаться от использования редукторов и другой регулирующей аппаратуры, что значительно упрощает механическую систему и снижает эксплуатационные расходы. АД запускается плавно, без пусковых токов и ударов, что снижает нагрузку на двигатель и механическую часть.
Применение ПЧ с ОС обеспечивает точное поддержание скорости вращения при переменной нагрузке.
Для питающей сети ПЧ является чисто активной нагрузкой и потребляет ровно столько энергии, сколько требуется для выполнения механической работы (с учётом к.п.д. преобразователя и двигателя).
ПЧ в комплекте с АД может служить для замены приводов постоянного тока. В этом случае значительно снижаются эксплуатационные затраты, повышается перегрузка и надёжность системы.
ПЧ, применяемые в регулируемых электроприводах с АД и СД, делятся на три вида:
¾ непосредственные – НП ( рис. 77);
¾ двухзвенные ПЧ с автономным инвертором напряжения – АИН, ПЧ с промежуточным контуром напряжения;
¾ двухзвенные ПЧ с автономным инвертором тока – АИТ, ПЧ с промежуточным контуром тока (рис. 52, 53).
НПЧ (рис. 77) по существу содержит три реверсивных преобразователя постоянного тока, управление которыми осуществляется модулирующим напряжением. Частота и амплитуда этого напряжения определяют частоту f2 и напряжение U2 на выходе НПЧ.
Основные достоинства НПЧ:
¾ естественная коммутация сетевым переменным напряжением, благодаря чему используются однооперационные тиристоры;
¾ минимальное количество вентилей, одновременно включённых между сетью и двигателем;
¾ полная реверсивность схемы.
Основной недостаток НПЧ – ухудшение формы выходного напряжения при увеличении частоты. Для схемы, рисунок 77, максимальная частота f2max = 16 Гц. Переход от нулевой трёхфазной схемы к мостовой (шести- или двенадцатитактной) расширяет рабочий диапазон до f2max = 25 Гц.
ПЧ с промежуточным контуром напряжения ( рис. 52, 81).
Первое звено ПЧ – нерегулируемый трёхфазный мостовой выпрямитель. Промежуточный контур постоянного напряжения – конденсатор, являющийся источником реактивной мощности для двигателя.
Второе звено – автономный инвертор напряжения АИН на быстродействующих управляемых ключах.
В качестве ключей в настоящее время чаще всего используют IGBT – модули, содержащие биполярный транзистор с изолированным затвором и шунтирующий диод.
АИН преобразует постоянное входное напряжение в переменное, модулированное обычно по синусоидальному закону. Полярность напряжения промежуточного контура и направление тока выпрямителя не могут быть изменены, поэтому ПЧ с АИН по принципу работы – нереверсивный.
Основные достоинства ПЧ с АИН:
¾ практически синусоидальный ток нагрузки;
¾ широкий диапазон выходных частот, 0 ÷ 1000 Гц.
ПЧ с промежуточным контуром тока (рис. 52, 53,б).
Первое звено ПЧ – управляемый выпрямитель на тиристорах. Промежуточный контур постоянного тока – реактор.
Второе звено ПЧ – автономный инвертор тока АИТ, выполненный на обычных однооперационных или запираемых GTO тиристорах. АИТ содержит конденсаторы, которые являются источником реактивной энергии для нагрузки ПЧ.
Главное отличие схемы АИТ от АИН заключается в отсутствии шунтирующих обратных диодов. Вследствие этого можно изменить полярность на входе АИТ и при неизменном направлении тока выпрямителя перевести двигатель в генераторный режим. Таким образом, при потреблении энергии из сети: выпрямитель работает в режиме выпрямителя, АИТ – в режиме инвертирования, электрическая машина – в двигательном режиме, в 1–ом или 3–ем квадрантах электромеханических координат, при частоте f2 и напряжение U2.
Если двигатель при f2 и U2 переходит в генераторную область, 2-ой или 4–ый квадрант, то АИТ должен работать управляемым выпрямителем, полярность напряжения на промежуточном контуре изменится, ток в этом контуре не меняет своего направления, а управляемый выпрямитель переводится в инверторный режим.
Основные достоинства ПЧ с АИТ:
¾ возможность рекуперации энергии в сеть;
¾ близкое к синусоидальному выходное напряжение;
¾ безаварийность режима К3 по выходу.
Основные недостатки ПЧ с АИТ:
¾ ограничение верхнего уровня диапазона регулирования выходной частоты, f2max = 100 ÷125 Гц ;
¾ коммутационные перенапряжения на тиристорах АИТ.
Характерные особенности современных ПЧ:
¾ использование современных полупроводниковых приборов IGBT – транзисторов и GTO – тиристоров;
¾ цифровое регулирование;
¾ возможность сопряжения с различными системами автоматизации и управления на базе персональных компьютеров;
¾ встроенная самодиагностика, сводящая к минимуму техническое обслуживание и простои технологического оборудования;
¾ наличие библиотеки предварительно запрограммированных прикладных микропрограмм, учитывающих специфические требования заказчика;
¾ использование алфавитно-цифрового дисплея, благодаря которому легко задаются параметры, адаптирующие привод к требованиям технологического процесса, и может быть оперативно получена информация о ходе процесса.
ПЧ Omron. На рисунке 79 приведена структурная схема ПЧ. Он состоит из системы управления, выпрямителя, шины постоянного тока и выходного генератора. Выходное напряжение создаётся методом высокочастотной широтно-импульсной модуляции. В выходном каскаде используются IGBT – транзисторы. По сравнению с тиристорами они обладают более высокой частотой переключения, лучше воспроизводят синусоиду и меньше шумят.
Для обеспечения достаточного момента при изменении частоты ПЧ изменяет выходное напряжение согласно выбранной вольт — частотной характеристике. В наиболее совершенных ПЧ типа 3G3FV реализовано векторное управление. Его смысл состоит в том, что СУ отслеживает напряжение на обмотках, ток двигателя и сдвиг фаз между ними, создаёт модели двигателя, рассчитывает скольжение и положение ротора. На основании этих данных в каждый момент времени определяется оптимальное положение поля, и генерируются соответствующие выходные сигналы.
Векторное управление позволяет работать с полным моментом в области нулевых частот, точно поддерживать скорость при переменной нагрузке без датчика обратной связи, точно контролировать момент на валу двигателя.
Omron выпускает три линии ПЧ: 3G3EV, 3G3HV, 3G3FV. Они отличаются диапазонами мощностей и возможностями системы управления.
Преобразователи EV – небольшой мощности 0,1÷1,5 кВт.
Серия HV охватывает большой диапазон мощностей 0,4÷300 кВт. Эти преобразователи имеют встроенный ПИД-регулятор и функцию энергосбережения.
Серия FV – мощности до 300 кВт, отличается режимом векторного управления, улучшенными динамическими характеристиками, автоматически определяет параметры двигателя. Может заменить двигатели постоянного тока. Имеют встроенный ПИД-регулятор.
Характеристика системы управления.
Метод управления – генерация синусоидального тока, высокочастотный ШИМ.
Аналоговое задание скорости.
Диапазон управления скоростью до 1: 1000
Управление двигателем вольт — частотное; векторное и вольт — частотное.
Панель управления цифровая, алфавитно-цифровая.
Основные возможности. ПЧ позволяет регулировать выходную частоту в пределах 0…400 Гц. Разгон и торможение двигателя осуществляется плавно по линейному закону, время разгона и торможения можно контролировать в пределах 0,1 с…30 мин.
При разгоне происходит автоматическое усиление момента для компенсации инерционной нагрузки.
ПЧ обеспечивает полную электронную защиту преобразователя и двигателя от перегрузок по току, перегрева, утечки на землю и обрыва линии передачи.
Преобразователь позволяет отслеживать и отображать на цифровом пульте основные параметры системы: заданную скорость, выходную частоту, ток и напряжение двигателя, выходную мощность и момент, состояние дискретных входов, общее время работы преобразователя и т.д.
В зависимости от характера нагрузки может быть выбрана подходящая вольт — частотная характеристика или получена своя собственная.
Управлять ПЧ можно либо с помощью встроенной цифровой панели, либо с внешнего пульта (рис. 80). Во втором случае скорость задаётся аналоговым сигналом 0 ÷ 10 В или 4 ÷ 20 mA, а команды пуска, останова и изменения режимов подаётся дискретными сигналами.
Специальные функции. Преобразователи фирмы Omron имеют много специальных функций.
Энергосбережение. Преобразователь позволяет экономить на непроизводительных затратах, функция энергосбережения, обеспечивает при выполнении той же работы экономию ещё 5..30% электроэнергии путём поддержания двигателя в режиме оптимального к.п.д.
В этом режиме преобразователь автоматически отслеживает потребление тока, рассчитывает нагрузку и снижает выходное напряжение. Таким образом, снижаются потери в обмотках двигателя, и увеличивается его к.п.д. Режим энергосбережения хорошо подходит для задач управления:
¾ скоростью вращения вентиляторов и насосов, где момент нелинейно зависит от скорости;
¾ оборудованием с переменной нагрузкой;
¾ машинами, которые большую часть времени работают с малой нагрузкой.
ПИД – регулятор встроен в преобразователь. Для работы в этом режиме необходим датчик обратной связи. Преобразователь изменяет скорость двигателя таким образом, чтобы поддерживать на заданном уровне определённый параметр системы, давление или температуру и т.д. ПИД – регулятор позволяет использовать преобразователь в системах, где требуется точное поддержание скорости вне зависимости от изменения нагрузки, поддержание давления жидкости или газа при переменном расходе, уровне жидкости и т.д.
Предотвращение резонанса. При работе на определённых частотах в механической системе возникает резонанс. Преобразователь обходит резонансную частоту.
Предотвращение опрокидывания. Эта функция выполняется в трёх режимах: при разгоне, торможении и работе. Если при разгоне задано слишком большое ускорение и не хватает мощности, то преобразователь автоматически продлевает время разгона. При торможении происходит тоже. В рабочем режиме эта функция позволяет в случае перегрузки вместо аварийного останова продолжить работу на меньшей скорости.
Определение скорости. Иногда преобразователь запускается при вращающейся нагрузке. Чтобы избежать опрокидывания, в этом случае применяется функция поиска скорости. При её использовании преобразователь во время пуска определяет скорость вращения и начинает регулирование не с нуля, а с этой скорости.
5.4. Современные ПЧ с АИН и тенденции их развития.
Преобразователи с АИН (рис.81) выполнены на IGBT модулях, находят массовое применение в большом числе электроприводов в самых различных отраслях. Структурная схема приведена на рисунке 81. Силовая часть состоит из нерегулируемого выпрямителя В, промежуточного контура напряжения, включающего реактор L (может отсутствовать и конденсатора C (присутствует всегда) и АИН. Последний по заданному закону широтно-импульсной модуляции — ШИМ преобразует постоянное напряжение Uc в регулируемое по частоте f2 и амплитуде первой гармоники выходное напряжение U2. Основой системы управления ПЧ является модуль микроконтроллера МК, программное обеспечение и вычислительные характеристики которого в основном определяют возможности системы регулирования всего электропривода.
При работе ПЧ в режиме «Местное управление» используется встроенный пульт управления ПУ, имеющий набор кнопок и дисплей для отображения заданных и текущих параметров, адресов, функций, сообщений об ошибках и т.п. Программное обеспечение МК позволяет при использовании только ПУ, подключив к ПЧ питающую сеть и двигатель настроить регулируемый электропривод с реализацией всех возможностей, заложенных в системе управления данного ПЧ.
В режиме «Дистанционное управление» информация передаётся или через клеммник управления «Сигналы вход / выход» или по последовательному интерфейсу «ЭВМ».
Интерфейсный модуль ИМ предназначен для согласования по уровню и преобразования в цифровую форму сигналов, поступающих с клеммника управления и с внутренних датчиков ПЧ. Обычно это датчики: напряжение сети U1 , напряжений на входе Uс и выходе АИН U2, температуры t0 охладителя ПЧ, токов сети i1, инвертора iuи двигателя i2. Этот же ИМ служит для преобразования выходных сигналов. Это сигналы для измерительных приборов и индикации, а также релейные выходы для управления внешним реле и контакторами.
Наличие модулей МК (микроконтроллер), ПУ (пульт управления), ИМ (интерфейсный модуль), характерно для микропроцессорной системы управления, МПСУ, любого электронного устройства. Отличительной особенностью МПСУ ПЧ является наличие ШИМ – контроллера, который аппаратно может быть встроен в микросхему МК или может быть выполнен в виде одной или нескольких микросхем. На выходе ШИМ – контроллера в соответствии с текущим режимом ПЧ образуются шесть дискретных сигналов управления транзисторами АИ.
Модуль выходных усилителей ВУ обеспечивает согласование этих сигналов с входными характеристиками IGBT модулей и гальваническую высоковольтную развязку сигналов. Основным фактором, вызвавшим резкое расширение разработок и объёмов производства ПЧ для электропривода, является прогресс в области силовых полупроводниковых приборов. АИН в ПЧ выполняются только на IGBT модулях.
Благодаря малым токам управления и большой допустимой импульсной мощности удалось резко снизить мощность ПЧ, упростить схему АИН за счёт вспомогательных элементов и увеличить надёжность всего ПЧ.
Совершенствование силовой части ПЧ проходило по двум направлениям. Первое было связано с улучшением характеристик IGBT модулей: увеличивались допустимые напряжения и ток; уменьшались время переключения и падение напряжения в открытом состоянии транзисторов. Это позволило поднять верхнюю границу диапазона ПЧ и снизить статические и динамические потери. Второе направление совершенствований – более тщательная отработка конструкции ПЧ и особенно системы его охлаждения.
Менее динамично менялись характеристики диодов и тиристоров для выпрямителя ПЧ и электролитических конденсаторов промежуточного напряжения, т.к. были практически исчерпаны возможности этих компонентов в рамках существующих технологий. От технических характеристик электролитических конденсаторов существенно зависит надёжность, массогабаритные показатели ПЧ.
Аппаратная часть систем управления ПЧ мало влияет на его массогабаритные, стоимостные показатели и надёжность.
Для решения задач оптимизации конструкции АИН разрабатываются и выпускаются новые типы силовых модулей – IPM. Модули IPM выполняются по гибридной технологии и содержат силовые транзисторы, выходные усилители (драйверы), охладитель и элементы защиты и контроля силовых транзисторов.
Созданы специализированные микроконтроллеры на применение в ПЧ. Наработка программного обеспечения привела к реализации сложных законов и функций управления электроприводом, укрупнению программных блоков в макропрограммы (макросы), позволяющие при настройке изменять меньшее количество параметров и упрощающие процесс настройки.
Основные функции, реализуемые микропроцессорной СУ ПЧ, можно условно сгруппировать по типам решаемых задач следующим образом:
¾ команды внутреннего пульта и индикация заданных и текущих параметров;
¾ ограничение переменных и анализ отказов;
¾ простые законы частотного регулирования, ускорение и замедление двигателя;
¾ программирование аналоговых и дискретных входов / выходов ПЧ, регулирования технологических параметров;
¾ управление без датчиков в контуре скорости;
¾ расширение функций с помощью дополнительных модулей;
¾ макропрограммы ПЧ.
Первые четыре группы реализуют практически во всех современных ПЧ. В полном объёме перечисленные функции в той или иной степени реализованы в ПЧ ряда фирм: ABB, Hitachi, Siemens и др.
Основная тенденция программного обеспечения современных ПЧ – перенести основную часть объектного программирования на производителя, расширить потребительские и технологические функции, упростить процесс включения ПЧ в современные системы регулируемого электропривода.
Получаемые точностные и динамические характеристики асинхронных электроприводов лучше, чем у быстродействующих приводов постоянного тока.
Как работает частотник? Принцип работы преобразователя.
Частотник служит для изменения характеристик энергии, поступающей от электросети к производственному оборудованию. Речь идёт о требуемом выборе частоты тока, вида напряжения. Технические возможности изменения этих понятий лежат в определённом диапазоне. Их показатели могут отличаться и быть выше данных, получаемых от первичного энергоисточника, так и гораздо ниже его.
Состав, конструкция схема
Оборудование преобразования частоты (ПЧ) компонуют из двух секций. Первая — с управляющими функциями, состоит из микропроцессоров. Их задача: регулировать коммутацию ключей, контролировать работу, выполнять диагностику и защиту. Вторая — силовая секция. Её комплектуют на транзисторах (тиристорах), выполняющих функцию переключателей.
Характеристика
Большинство распространённых электрорегулируемых приводов используют преобразователей частоты ПЧ двух классов. Основными признаками их разделения являются структурное отличие и принцип работы силовой части устройства. Свои функции ПЧ выполняет с промежуточным узлом, действующим с постоянным током, или осуществляется прямая связь с источником.
Положительной особенностью является высокая эффективность. Отдача достигает 98,5% и более. Используется для управления мощными высоковольтными приводами. Частотник значится относительно дешёвым, несмотря на дополнительную комплектацию схем регулирования. Эффективный способ его применения оценивают, рассматривая класс, преимущества или недостатки. Сначала использовались преобразователи с прямым, непосредственным подсоединением к сети. (рисунок 1).
То есть, источник питания подключается к статорным обмоткам двигателя через открытые вентили. Конструкция силовой части состояла из выпрямителей, выполненных на полупроводниковых приборах — тиристорах.
Обладающих свойствами электровентиля. И системы управления (СУ). Которая, попеременно их открывая, подключала к сети обмотки электродвигателя. Напряжение поступает на тиристоры, имея трёхфазный вид синусоиды Ua, Uв, Uс. На выходе преобразователя сформировано напряжение U вых.
Это показано на одной фазе с вырезанной полосой (рисунок 1). Увеличенный, он имеет зазубренный вид, который аппроксимирует линия синего цвета. Выходная частота устройства значится в границах 0—30 Гц.
Этот короткий диапазон лимитирует возможность привода регулировать скорость асинхронного электродвигателя. Такое подключение на практике даёт результат один к десяти. Хотя технологические процессы диктуют значительного увеличения этого соотношения.
Применение неуправляемых тиристоров считается недостатком конструкции, так как их использование требует усовершенствовать систему регулирования. Она становится более сложной. Кроме того, «зазубренная» форма напряжения на выходе (рис. 2), приводит к появлению высших гармоник. Их наличие сопровождается дополнительными потерями. Которые наблюдаются, в увеличении перегрева электродвигателя, уменьшение крутящего усилия (момент) на валу и появление помех в сети. Поэтому дополнительный монтаж деталей и узлов для устранения этих недостатков, повышает стоимость устройства. Увеличивают его габариты, вес и уменьшают эффективность привода.
В настоящее время преобразователи с прямой (непосредственной) связью не применяют. Сейчас в системах дополнительно включён узел с функцией постоянного тока. При этом задействовано удвоенное трансформирование электроэнергии. Напряжение на входе, с неизменной амплитудой, частотой и формой синусоиды, поступает на клеммы выпрямительного блока (B). Дальше проходит фильтр (Ф), уменьшающий пульсацию высших гармоник. Назначение (И) инвертора — преобразовать постоянное напряжение в переменное варьируемой частоты и амплитуды. При этом используются отдельные внутренние блоки.
Функции электронных ключей, в составе инверторов, выполняют запираемые GTO тиристоры. Или заменяемые его типы: GCT, IGCT, SGCT, а также трёхэлектродным полупроводниковым элементом с изолированным затвором IGBT.
Преимуществом частотника на тиристорах обоих классов является возможность использовать их при повышенных показателях напряжения и тока. Они выдерживают длительную работу, электроимпульсные скачки. Устойчивое функционирование преобразователи частоты поддерживают в широком диапазоне мощностей. С вилкой от сотни кВт до десятка мВт. На выходе ПЧ напряжение составляет от 3 до 10 кв. Однако, сравнивая цену по отношению к мощности, она остаётся завышенной.
Устройства регулируемого привода, в состав которого входили запираемые тиристоры, занимали преобладающее место. Но, потом их сменил транзистор IGBT с изолированным затвором.
Применение тиристора усложняет средство управления. Являясь полупроводниковым элементом, он подключается подачей импульса на регулируемый контакт, достаточно сменить полярность напряжение или понизить величину тока близкую к нулю. Сложность процесса и дополнительные элементы делают систему регулировки более громоздкой.
Транзисторы IGBT отличаются простым способом управления с незначительной затратой расхода энергии. Большой рабочий диапазон частот расширяет границы выбора оборотов электромотора и увеличивает скоростную характеристику. Совместное действие транзистора с микропроцессорным управлением влияет на степень высших гармоник. Кроме того, отмечаются следующие особенности.
- В обмотках и магнитопроводе электродвигателя уменьшаются потери.
- Снижается тепло подогрев.
- Минимум проявлений пульсаций момента.
- Исключаются рывки ротора в зоне небольших частот.
- Сокращаются потери в конденсаторах, трансформаторах, проводах тем самым увеличиваются сроки их эксплуатационной пригодности.
- Приборы измерений и защиты (особенно индукционные) допускают меньшее неточностей, искажённых срабатываний.
Сравнивая ПЧ одинаковой выходной мощности с другими схемами, устройства на транзисторах IGBT отличаются надёжностью, меньшими габаритами, массой. Достигается это за счёт модульной конструкции аппаратных средств. Минимальным набора элементов, составляющих устройство. Защитой от резких колебаний тока и напряжения. Снижением количества отказов и остановок электропривода. Лучшим теплоотводом
Высокая цена низковольтных преобразователей (IGBT) на единицу выходной мощности объясняется трудностью изготовления транзисторных модулей. Рассматривая цену и качество, они предпочтительнее тиристорных. И также надо учитывать постоянную динамику сокращения стоимости производства устройств. Тенденцию к её снижению.
Затруднение в применении высоковольтного привода с прямым изменением частоты является ограничение по мощности свыше двух мВт. Так как увеличение напряжения и рабочего тока укрупняют габариты транзисторного модуля, необходим более высокоэффективный теплоотвод от полупроводника. И как выход, до появления новейших биполярных элементов, модули в преобразователях соединяют последовательно по несколько штук.
Низковольтный ПЧ на IGB транзисторах. Устройство, особенности
Рисунок 3 показывает блочную схему и функции основных узлов. После каждого из них, отображены линии выходных параметров электроэнергии. Подаваемая энергия (Uвх.), в форме синусоиды, неизменной амплитуды, частоты. Дальше — узел постоянного тока, состоящий из неуправляемого или регулируемого выпрямителя 1. Емкостного фильтра 2, с функциями сглаживания пульсации (U выпр.). Потом, сигнал Ud поступает на независимый, автономный инвертор 3, работающий с нагрузкой, которая потребляет ту же частоту.
Он преобразует одно или 3-фазный ток постоянной величины в переменный, имеет приемлемый уровень гармоник, добавленных к выходному напряжению. Собранный на полностью регулируемых полупроводниковых приборах IGBT. Сигналы СУ подсоединяют обмотку электродвигателя к соответствующим полюсам, используя силовые транзисторы. Подключение происходит в период импульсов, моделируемых по синусоиде амплитудой и частотой. Управляемые выпрямители (1) регулируют величину Ud. Функцию сглаживания выполняет электрофильтр (4).
Вывод
В результате работы частотника получают переменное напряжение с варьируемыми показателями. Подавая энергию с такими параметрами на обмотки электродвигателя, выбирают требуемую скорость вращения вала. Статические ПЧ являются наиболее применяемыми в регулировке исполнительных механизмов. Установка управляемого электропривода экономически обоснована в энергосберегающих технологиях.
Урок 7
ПРЕОБРАЗОВАТЕЛИ ЧАСТОТЫ
ОБЩИЕ СВЕДЕНИЯ
Если усиление принимаемых высокочастотных сигналов производится на одной постоянной частоте, то радиоприемник освобождается от недостатков, присущих приемникам прямого усиления. Характерным элементом супергетеродинного приемника является преобразователь частоты (ПЧ), расположенный между усилителем радиочастоты (или входной цепью) и усилителем
промежуточной частоты. В преобразователе частоты происходит преобразование колебаний, принимаемых радиоприемником сигналов одной частоты в колебания другой. При преобразовании частоты происходит процесс линейного переноса спектра принимаемого сигнала по шкале частот из одной части радиочастотного диапазона в другую без изменения соотношений между его составляющими. Для модулированных сигналов это означает повышение или понижение несущей частоты с сохранением вида и закона модуляции (рис. 12.1).
Частота сигнала, полученная после преобразования, называется промежуточной и обозначается fпр. Таким образом, основной задачей преобразования в радиоприемнике является преобразование частоты принимаемого сигнала fс в промежуточную частоту fпр. Одновременно происходит усиление или ослабление принимаемого сигнала, а также выделение промежуточной частоты из спектра выходного тока преобразовательного прибора. В структурную схему преобразователя частоты (рис. 12.2) входят преобразовательный прибор ПП, гетеродин Г и избирательная цепь ИЦ с цепями связи т1и т2. Процесс преобразования частоты осуществляется с помощью параметрических преобразовательных систем. В связи с малым уровнем подаваемых на вход преобразователя сигналов fс электронные приборы (биполярные и полевые транзисторы, диоды, электронные лампы) по отношению к ним можно считать линейными. Поэтому преобразовательные приборы можно представить в виде линейных активных двухполюсников
Рис. 12.2 Структурная схема преобразователя частоты.
или четырехполюсников с периодически изменяющимися под воздействием большого напряжения гетеродина параметрами. Преобразование частоты в этом случае можно рассматривать как параметрическое. Избирательная цепь служит для выделения составляющих спектра выходного тока преобразователя вблизи выбранной промежуточной частоты. В качестве избирательных цепей преобразователей частоты применяются фильтры сосредоточенной селективности (ФСС), двухконтурные полосовые фильтры или одиночные контуры.
Принцип преобразования частоты
Преобразование частоты осуществляется с помощью нелинейных систем или систем с периодически изменяющимися параметрами. При использовании нелинейной системы на нее воздействуют Два колебания: колебание частоты принимаемого сигнала и колебание вспомогательной частоты гетеродина. Схема простейшего преобразователя g диодом в качестве нелинейной системы приведена на фиг. 6.1.
Ток разностной (промежуточной) частоты, возникающий в цепи диода, выделяется на колебательном контуре, настроенном на эту частоту
fпр =fг – fс. Нелинейными элементами таких систем также могут быть транзисторы, электронные лампы, полупроводниковые и параметрические диоды.
К системам с изменяющимися параметрами относятся электронные лампы с двумя управляющими сетками и полевые транзисторры с двумя затворами.
Рассмотрим процесс преобразования частоты в цепи с нелинейным элементом, вольт-амперная характеристика которого задана полиномом второй степени:
где и — сумма напряжений сигнала и гетеродина.
Определим составляющую тока в цепи нелинейного элемента при воздействии на него напряжений двух частот
Подставив значение и в выражение (6.1) и использовав формулы тригонометрического разложения
получим
Из формулы (6.6) видно, что ток i кроме составляющих основных ча
стот ωГ и ωС содержит постоянные составляющие (первый, четвертый и пятый члены выражения), токи вторых гармоник 2ωС, 2ωГ (шестой и седьмой члены) и составляющие разностной и суммарной частот (последние члены).
Следует отметить, что составляющую разностной частоты можно получить двумя путями: fпр = fг – fс, fпр = fс — fг. В соответствии с этим различают «верхнюю» настройку гетеродина, которая обычно используется в диапазонах длинных, средних и коротких волн (fг = fс + fпР), и «нижнюю»
(fг = fс — fпр), которая применяется иногда в диапазоне СВЧ. Ток на выходе нелинейного элемента, являющийся током промежуточной частоты, определяется предпоследним членом выражения (6.6)
ОСНОВНЫЕ КАЧЕСТВЕННЫЕ ПОКАЗАТЕЛИ ПРЕОБРАЗОВАТЕЛЯ
ЧАСТОТЫ
Качество работы преобразователя частоты оценивается следующими показателями.
Коэффициентом передачи (усилением), который определяется при точной настройке гетеродина, когда промежуточная частота равна своему номинальному значению.
• Коэффициент передачи может быть по напряжению или мощности; Кпч = UnPIUc; Кпч = Рпр/Рс, где Uпр, Рпр — напряжение и мощность промежуточной частоты на выходе ПЧ; Uc, Рс— напряжение и мощность полезного сигнала на входе ПЧ.
Диапазоном частот гетеродина преобразователя частоты, который должен быть таким, чтобы перестройка гетеродина совместно с перестройкой входной цепи или входной цепи и УРЧ диапазонного приемника обеспечивала постоянную промежуточную частоту в рабочем диапазоне частот.
Избирательностью преобразователя частоты по соседнему каналу, которая определяется его резонансной нагрузкой. На качество работы преобразователя частоты большое влияние оказывает стабильность частоты гетеродина которая может изменяться в процессе работы радиоприемника под влиянием изменения температуры, влажности, напряжения источника питания и механических воздействий. При произвольном изменении частоты гетеродина будет изменяться промежуточная частота и, следовательно, уменьшится коэффициент усиления каскадов УПЧ и возникнут искажения сигнала на выходе приемника.
Стабильность частоты гетеродина, характеризующаяся относительным изменением частоты гетеродина ∆f/f0r под влиянием дестабилизирующих факторов, должна быть как можно выше. Величина ее может лежать в пределах от 10-3 до 10-10. Так как сигнал па входе преобразователя обычно имеет низкий уровень, то важным параметром, характеризующим преобразователь частоты, является eго коэффициент шума или температура шума, особенно в приемниках СВЧ диапазона.
Транзисторные и ламповые преобразователи частоты различаются по способу получения напряжения гетеродина. Схемы преобразователей могут быть с отдельным гетеродином или с совмещенным, при котором функции смесителя и гетеродина объединены в одном усилительном приборе.
Транзисторные преобразователи различаются способом включения транзистора в смесителе. Наибольшее распространение получили преобразователи, у которых напряжение сигнала подается в цепь базы, а напряжение гетеродина — в цепь эмиттера. Ламповые преобразователи частоты различают по типу применяемых смесительных ламп — диодов, триодов, пентодов и специальных смесительных ламп — гептодов.
Непосредственный преобразователь частоты — Студопедия
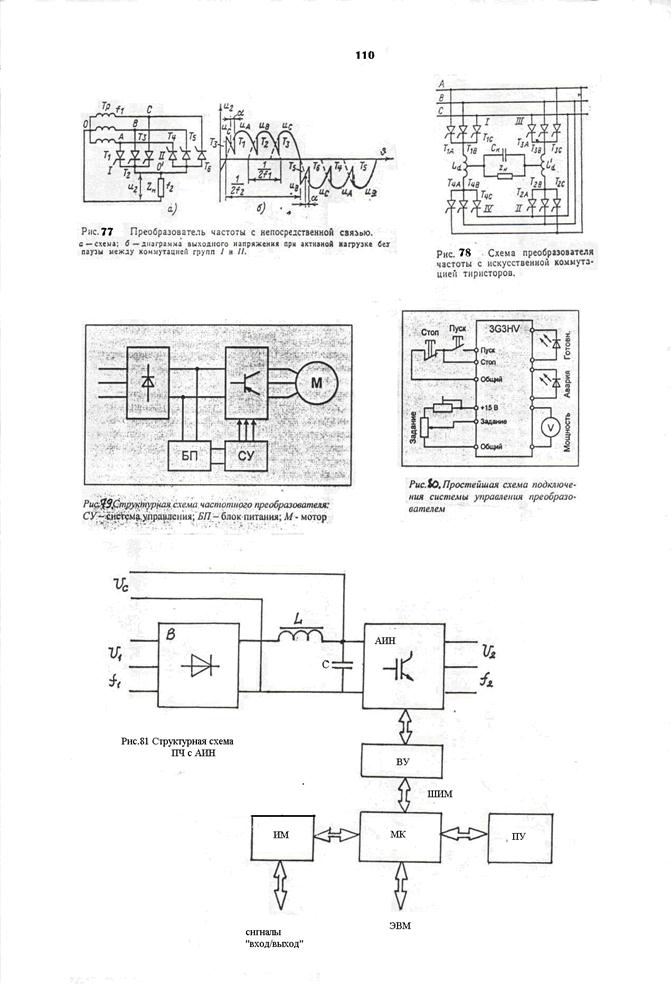
Схема преобразователя с непосредственной связью представлена на рисунке 9.1. По этой схеме напряжение трехфазной сети и с неизменной частотой f1 преобразуется в напряжение однофазной сети с переменной частотой f2,т. е. изменяется не только частота, но и число фаз.
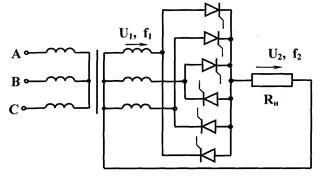
Рисунок 9.1 – Непосредственный преобразователь частоты
От трехфазной сети можно получить однофазный ток переменной частоты, и, наоборот, от однофазной сети – трехфазный ток. Обычно преобразователи частоты питаются от трехфазной сети, при этом улучшается форма кривой вторичного напряжения.
Преобразователь с непосредственной связью представляет собой управляемый выпрямитель, имеющий два комплекта тиристоров. Выходное напряжение формируется за счет последовательной коммутации тиристоров, присоединенных к различным фазам первичной сети. Положительная полуволна формируется за счет тиристоров группы К(катодная группа), а отрицательная – за счет тиристоров группы А(анодная группа). Форма вторичного напряжения представлена на рисунке 9. 2.
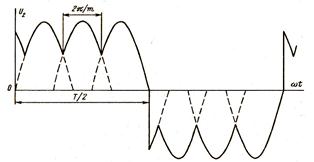
Рисунок 9.2 – Формирование выходного напряжения НПЧ
Как и в реверсивных преобразователях постоянного тока, управление тиристорами катодной и анодной группы может быть совместным и раздельным. При совместном управлении для ограничения уравнительных токов необходимы реакторы, которые усложняют установку. Поэтому обычно используется раздельное управление, и при переключении с одной группы тиристоров на другую вводится небольшая (примерно 0,1 мс) бестоковая пауза. Для регулирования напряжения используются те же тиристоры. При увеличении угла регулирования соответствующий тиристор включается несколько позже, и среднее напряжение снижается. Изменением углов регулирования последовательно включаемых тиристоров может быть обеспечено и формирование кривой напряжения, в большей степени приближающейся к синусоидальной.
Схема для преобразования трехфазного напряжения сети в трехфазное переменной частоты представлена на рисунке 9. 3. Как видно, существенный недостаток НПЧ – большое число тиристоров (в данном случае 18).
Сформированная кривая напряжения представлена на рисунке 9.3. При активно-индуктивной нагрузке, и в частности, при питании электродвигателя, в некотором интервале (при изменении знака напряжения) тиристоры переводятся в инверторный режим.
Регулирование частоты в системах с НПЧ может осуществляться только в зоне низких частот. Поскольку кривая вторичного напряжения формируется из отрезков синусоид первичного напряжения, то максимальная частота не может быть поднята выше уровня, равного половине частоты питающей сети. При питании преобразователя от сети 50 Гц частота может регулироваться только в зоне от 20 Гц до 0.
Рисунок 9.3 – Схема НПЧ для преобразования трехфазного напряжения
сети в трехфазное переменной частоты

Рисунок 9.4 – Напряжение на входе и выходе НПЧ
9.2. Преобразователи частоты со звеном постоянного тока.
Более широкий диапазон регулирования частоты и соответственно частоты вращения двигателя обеспечивают преобразователем со звеном постоянного тока, структурная схема которого представлены на рисунке 9.5 и 9.6. Схема содержит два независимых канала управления по частоте и напряжению. Вместо управляемого выпрямителя может использоваться широтно-импульсный преобразователь. Выходное напряжение может также регулироваться за счет изменения угла управления тиристорами в инверторе. В этом случае существенно усложняется схема управления, однако отпадает необходимость в управляемом выпрямителе, вместо которого может быть включен неуправляемый выпрямитель с постоянным напряжением.
Автономный инвертор обычно представляет собой инвертор напряжения. В инверторах для установок средней и большой мощности используются как тиристоры, так и транзисторы.
Так как функционирование инвертора на транзисторах проще, то рассмотрим сначала этот тип инвертора. Схема его в однофазном исполнении представлена на рисунке 11.7.
 |
Рисунок 9.5 – Преобразователь частоты со звеном постоянного тока:
РН, РЧ – регуляторы напряжения и частоты;
УВ – управляемый выпрямитель; Ф – фильтр; И – инвертор
 | |||
|
По команде от задающего устройства транзисторные ключи VT1, VT4 и VT2, VT3 попарно поочередно включаются. При этом на выходе преобразователя получаем напряжение прямоугольной формы. При индуктивной нагрузке форма кривой тока имеет вид, представленный на рисунке 9.7. Для пропуска запасенной электромагнитной энергии после отключения соответствующего тиристора в схеме используются диоды VD1-VD4. Кривые токов, протекающих через них, показаны на том же рисунке 9.7.
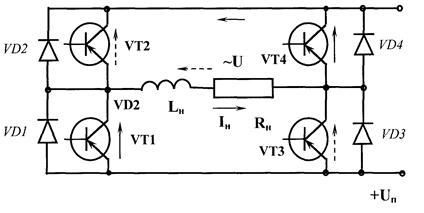
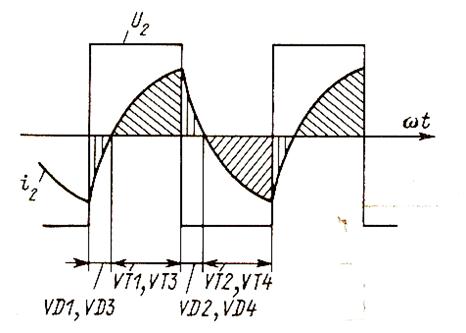
Рисунок 9.8 –Ток на выходе инвертора
Кривая выходного напряжения, естественно, имеет искаженный вид, существенно отличающийся от синусоиды. Однако гармонический состав напряжения в преобразователе со звеном постоянного тока значительно лучше, чем в НПЧ. Для формирования трехфазного напряжения, естественно, необходимо иметь три однофазных инвертора.
На рисунке 9.9 представлена структурная схема преобразователя частоты со звеном повышенной частоты. Управляемый инвертор обеспечивает высокую частоту напряжения. При применении трансформатора для повышения напряжения высокая частота позволяет уменьшить массогабаритные размеры трансформатора.
 | ||
|
10. Фильтры и пульсация выпрямляемого напряжения.
Векторное управление электродвигателем «на пальцах» / Блог компании НПФ ВЕКТОР / Хабр
— Что такое векторное управление?— Держать ток под 90 градусов.
Термин «векторное управление» электродвигателями знаком всем, кто хоть как-то интересовался вопросом, как с помощью микроконтроллера управлять двигателем переменного тока. Однако обычно в любой книге по электроприводу глава про векторное управление находится где-нибудь ближе к концу, состоит из кучи волосатых формул с отсылками ко всем остальным главам книги. Отчего разбираться в этом вопросе совсем не хочется. И даже самые простые объяснения всё равно держат путь через дифференциальные уравнения равновесия, векторные диаграммы и кучу другой математики. Из-за чего появляются примерно вот такие вот попытки как-то закрутить двигатель без использования мат.части. Но на самом деле векторное управление – это очень просто, если понимать принцип его работы «на пальцах». А там уже и с формулами разбираться в случае надобности будет веселее.
Рассмотрим принцип работы самого простого двигателя переменного тока – синхронной машины с постоянными магнитами. Удобный пример – компас: его магнитная стрелка представляет из себя ротор синхронной машины, а магнитное поле Земли – магнитное поле статора. Без внешней нагрузки (а в компасе её нет, если не считать трение и жидкость, гасящую колебания стрелки) ротор всегда ориентируется по полю статора. Если мы будем держать компас и вращать под ним Землю, то стрелка будет крутиться вслед, совершая работу по перемешиванию жидкости внутри компаса. Но есть и чуть более простой способ – можно взять внешний магнит, например, в виде стержня с полюсами на концах, поле которого значительно сильнее магнитного поля Земли, поднести его к компасу сверху и вращать магнит. Стрелка будет двигаться вслед за вращающимся магнитным полем. В настоящем синхронном двигателе поле статора создается электромагнитами – катушками с током. Схемы обмоток там сложные, но принцип один – они создают статором магнитное поле, направленное в нужную сторону и имеющее нужную амплитуду. Посмотрим на следующий рисунок (Рисунок 1). В центре изображен магнит – ротор синхронного двигателя («стрелка» компаса), а по бокам два электромагнита – катушки, создающие каждая свое магнитное поле, одна в вертикальной оси, другая в горизонтальной.
Рисунок 1. Принцип действия синхронной электрической машины
Магнитный поток катушки пропорционален току в ней (в первом приближении). Нас будет интересовать магнитный поток от статора в том месте, где расположен ротор, т.е. в центре рисунка (краевыми эффектами, рассеянием и всем прочим пренебрегаем). Магнитные потоки двух перпендикулярно расположенных катушек векторно складываются, образуя для взаимодействия с ротором один общий поток. Но так как поток пропорционален току в катушке, удобно рисовать непосредственно вектора токов, сонаправив их с потоком. На рисунке показаны некоторые токи Iα и Iβ, создающие магнитные потоки по осям α и β соответственно. Суммарный вектор тока статора Is создает сонаправленый ему магнитный поток статора. Т.е. по сути Is символизирует внешний магнит, который мы подносили к компасу, но созданный электромагнитами – катушками с током.
На рисунке ротор расположен в произвольном положении, но из этого положения ротор будет стремиться повернуться согласно магнитному потоку статора, т.е. по вектору Is (положение ротора в этом случае показано пунктирной линией). Соответственно, если подать ток только в фазу α, скажем, Iα = 1А, ротор встанет горизонтально, а если в β, вертикально, а если приложить Iβ = -1А то перевернется на 180 градусов. Если запитать ток Iα по закону синуса, а Iβ по закону косинуса от времени, то будет создано вращающееся магнитное поле. Ротор будет следовать за ним и крутиться (как стрелка компаса следует за вращением магнита руками). Это базовый принцип работы синхронной машины, в данном случае двухфазной с одной парой плюсов.
Давайте нарисуем график момента двигателя в зависимости от углового положения вала ротора и вектора тока Is статора – угловую характеристику синхронного двигателя. Эта зависимость синусоидальная (Рисунок 2).
Рисунок 2. Угловая характеристика синхронной машины (здесь есть некоторая историческая путаница со знаками момента и угла, из-за чего часто рисуют характеристику перевернутой относительно горизонтальной оси).
Чтобы получить этот график на практике, можно поставить на вал ротора датчик вращающего момента, затем включить любой вектор тока, например, просто подать ток в фазу α. Ротор повернется в соответствующее положение, которое нужно принять за ноль. Потом через датчик момента «руками» нужно поворачивать ротор, фиксируя на графике в каждой точке угол θ, на который повернули, и момент, который показал датчик. Т.е. нужно растягивать «магнитную пружину» двигателя через датчик момента. Самый большой момент окажется при угле в 90 градусов от вектора тока (от начала). Амплитуда получившегося максимального момента Ммакс пропорциональна амплитуде приложенного вектора тока. Будет приложен 1А, получим, скажем, Ммакс = 1 Н∙м (ньютон*метр, единица измерения вращающего момента), если подадим 2А, получим Ммакс = 2 Н∙м.
Из этой характеристики следует, что двигатель развивает наибольший момент, когда ротор находится под 90° к вектору тока. Так как мы при создании системы управления на микроконтроллере хотим получить от двигателя наибольший момент при минимуме потерь, а потери, в первую очередь, это ток в обмотках, то рациональнее всего ставить вектор тока всегда под 90° к магнитному полю ротора, т.е. перпендикулярно магниту на рисунке 1. Нужно поменять всё наоборот – не ротор едет к задаваемому нами вектору тока, а мы задаем вектор тока всегда под 90° к ротору, как бы он там не вращался, т.е. «прибить» вектор тока к ротору. Регулировать же момент двигателя будем амплитудой тока. Чем больше амплитуда – тем выше момент. А частота вращения, частота тока в обмотках это уже «не наше» дело – какая получится, как ротор будет вращаться, так и будет – мы управляем моментом на валу. Как ни странно, именно это и называется векторным управлением – когда мы управляем вектором тока статора так, чтобы он был под 90° к магнитному полю ротора. Хотя некоторые учебники дают более широкие определения, вплоть до такого, что векторным управлением называют вообще любые законы управления, где задействованы «вектора», но обычно под векторным управлением понимается именно приведенный выше способ управления.
Но как векторное управления достигается на практике? Очевидно, для начала понадобится знать положение ротора, чтобы было относительно чего отмерять 90°. Это проще всего сделать установив, собственно, датчик положения на вал ротора. Потом нужно разобраться, как создать вектор тока, поддерживая желаемые токи в фазах α и β. На двигатель-то мы прикладываем напряжение, а не ток… Но раз мы хотим что-то поддерживать, то нужно это измерять. Поэтому для векторного управления понадобятся датчики токов фаз. Далее нужно собрать структуру векторного управления в виде программы на микроконтроллере, которая будет делать всё остальное. Чтобы такое объяснение не было похоже на инструкцию «как нарисовать сову», давайте продолжим погружение.
Поддерживать ток микроконтроллером можно использовав программный ПИ (пропорционально-интегральный) регулятор тока и ШИМ. Например, структура с регулятором тока для одной фазы α показана ниже (Рисунок 3).
Рисунок 3. Замкнутая по току структура управления для одной фазы
Здесь задание тока iα_зад – некая константа, тот ток, который мы хотим поддерживать для этой фазы, например 1А. Задание поступает на сумматор регулятора тока, раскрытая структура которого показана выше. Если читатель не знает, как работает ПИ-регулятор – то увы и ах. Могу лишь посоветовать что-то из этого. Регулятор тока на выходе задает напряжение фазы Uα. Напряжение поступает на блок ШИМ, который рассчитывает задания скважностей (уставок сравнения) для таймеров ШИМ микроконтроллера, формирующих ШИМ на мостовом инверторе из четырех ключей, чтобы сформировать это Uα. Алгоритм может быть разный, например, для положительного напряжения ШИМим правой стойкой пропорционально заданию напряжения, на левой замкнут нижний ключ, для отрицательного ШИМим левой, на правой замкнут нижний. Не забываем добавить мёртвое время! В итоге такая структура делает программный «источник тока» за счет источника напряжения: мы задаем нужное нам значение iα_зад, а данная структура с определенным быстродействием его реализует.
Дальше, возможно, некоторые читатели уже подумали, что до векторной структуры управления осталось дело за малым – нужно поставить два регулятора тока, на каждую фазу по регулятору, и формировать на них задание в зависимости от угла с датчика положения ротора (ДПР), т.е. сделать что-то типа такой структуры (Рисунок 4):
Рисунок 4. Неправильная (наивная) структура векторного управления
Так делать нельзя. При вращении ротора переменные iα_зад и iβ_зад будут синусоидальными, т.е. задание на регуляторы тока будет всё время меняться. Быстродействие регулятора не бесконечно, поэтому при изменении задания он не мгновенно его отрабатывает. Если задание постоянно менять, то регулятор будет всё время его догонять, никогда не достигая. И с ростом скорости вращения двигателя отставание реального тока от заданного будет всё больше и больше, пока желаемый угол в 90° между током и магнитом ротора совсем не перестанет на него быть похожим, а векторное управление не перестанет быть таковым. Поэтому делают по-другому. Правильная структура следующая (Рисунок 5):
Рисунок 5. Структура векторного датчикового управления для двухфазной синхронной машины
Здесь добавились два блока – БКП_1 и БКП_2: блоки координатных преобразований. Они делают очень простую вещь: поворачивают вектор на входе на заданный угол. Причем БПК_1 поворачивает на +ϴ, а БКП_2 на —ϴ. Это вся разница между ними. В иностранной литературе их называют преобразованиями Парка (Park transformation). БКП_2 делает преобразование координат для токов: от неподвижных осей α и β, привязанных к статору двигателя, к вращающимся осям d и q, привязанных к ротору двигателя (используя для этого угол положения ротора ϴ). А БКП_1 делает обратное преобразование, от задания напряжения по осям d и q делает переход к осям α и β. Формул для преобразования координат не привожу, но они простые и очень легко ищутся. Собственно, в них нет ничего сложнее школьной геометрии (Рисунок 6):
Рисунок 6. Координатные преобразования из неподвижных осей α и β, привязанных к статору двигателя, к вращающимся осям осям d и q, привязанных к ротору
То есть вместо «вращения» задания регуляторов (как было в прошлой структуре), вращаются их входы и выходы, а сами регуляторы работают в статическом режиме: токи d, q и выходы регуляторов в установившемся режиме постоянны. Оси d и q вращаются вместе с ротором (так их вращает сигнал с датчика положения ротора), при этом регулятор оси q регулирует как раз тот ток, который в начале статьи я называл «перпендикулярным полю ротора», то есть это моментообразующий ток, а ток d сонаправлен с «магнитом ротора», поэтому он нам не нужен и мы задаём его равным нулю. Такая структура избавлена от недостатка первой структуры – регуляторы токов даже не знают, что что-то где-то крутится. Они работают в статическом режиме: отрегулировали каждый свой ток, вышли на заданное напряжение – и всё, как ротор от них не убегай, они про это даже не узнают: всю работу по повороту делают блоки координатных преобразований.
Для линейного движения пусть это будет, например, городской автобус. Он всё время то разгоняется, то тормозит, то едет назад и вообще ведёт себя как хочет: это ротор двигателя. Также есть вы на автомобиле рядом, едете параллельно: ваша задача быть ровно посредине автобуса: «держать 90°», вы – это регуляторы тока. Если автобус все время меняет скорость – вы тоже должны соответственно менять скорость и всё время её отслеживать. Но теперь сделаем для вас «векторное управление». Вы залезли внутрь автобуса, встали посередине и держитесь за поручень – как автобус не убегай, вы легко справляетесь с задачей «быть посередине автобуса». Аналогично и регуляторы токов, «катаясь» во вращающихся осях d, q ротора, живут легкой жизнью.
Приведенная выше структура действительно работает и используется в современных электроприводах. Только в ней не хватает целой кучи мелких «улучшалок», без которых её уже не принято делать, типа компенсации перекрестных связей, разных ограничений, ослабления поля и т.п. Но базовый принцип именно такой.
А если нужно регулировать не момент привода, а всё-таки скорость (по правильному угловую скорость, частоту вращения)? Ну тогда ставим еще один ПИ-регулятор – регулятор скорости (РС). На вход подаем задание скорости, а на выходе имеем задание момента. Так как ток оси q пропорционален моменту, то можно для упрощения выход регулятора скорости подать сразу на вход регулятора тока оси q, вот так (Рисунок 7):
Рисунок 7. Регулятор скорости для векторного управления
Здесь ЗИ – задатчик интенсивности, плавно изменяет свой выход, чтобы двигатель разгонялся с нужным темпом, а не гнал на полном токе до задания скорости. Текущая частота вращения ω взята из обработчика датчика положения ротора, так как ω это производная от углового положения ϴ. Ну или можно просто время между импульсами датчика засекать…
Как сделать тоже самое для трехфазного двигателя? Ну, собственно, ничего особенного, добавляем еще один блок и меняем модуль ШИМ (Рисунок 8).
Рисунок 8. Структура векторного датчикового управления для трехфазной синхронной машины
Трехфазные токи, точно так же как и двухфазные, служат для одной цели – создать вектор тока статора Is, направленный в нужную сторону и имеющий нужную амплитуду. Поэтому трехфазные токи можно просто пересчитать в двухфазные, а дальше оставить ту же систему управления, что уже была собрана для двухфазной машины. В англоязычной литературе такой «пересчёт» называют преобразованиями Кларк – Clarke transformation (Эдит Кларк – это она), у нас — фазными преобразованиями. В структуре на рисунке 8, соответственно, эта операция производится блоком фазных преобразований. Делаются они опять при помощи курса школьной геометрии (Рисунок 9):
Рисунок 9. Фазные преобразования – из трех фаз к двум. Для удобства принимаем равенство амплитуды вектора Is амплитуде тока в фазе
Думаю, комментарии не нужны. Немного слов про ток фазы C. Туда можно не ставить датчик тока, так как три фазы двигателя соединены в звезду, и по закону Кирхгофа всё, что втекло через две фазы, должно вытечь из третьей (если, конечно, у вас в двигателе не пробита изоляция, и половина не утекла куда-то на корпус), поэтому ток фазы C вычисляют как скалярную сумму токов фаз A и B со знаком минус. Хотя третий датчик иногда ставят чтобы снизить погрешность измерений.
Также нужна полная переделка модуля ШИМ. Обычно для трехфазных двигателей используют трехфазный шестиключевой инвертор. На рисунке задание напряжения поступает всё ещё в двухфазных осях. Внутри модуля ШИМ с помощью обратных фазных преобразований можно пересчитать это в напряжения фаз A, B, C, которые надо приложить в этот момент к двигателю. А вот что делать дальше… Возможны варианты. Наивный метод – это задать на каждую стойку инвертора скважность, пропорциональную желаемому напряжению плюс 0.5. Это называется синусоидальной ШИМ. Именно такой метод применил автор в habrahabr.ru/post/128407. В этом методе всё хорошо, кроме того, что таким методом будет недоиспользован инвертор по напряжению – т.е. максимальное напряжение, которое будет получено, окажется меньше, чем вы могли бы получить, если бы использовали более совершенный метод ШИМ.
Посчитаем. Пусть у вас есть классический преобразователь частоты, питающийся от промышленной трехфазной сети 380В 50Гц. Здесь 380В это линейное (между фазами) действующее напряжение. Так как в преобразователе стоит выпрямитель, он выпрямит это напряжение и на шине постоянного тока окажется напряжение, равное амплитудному линейному напряжению, т.е. 380∙√2=540В постоянного напряжения (по крайней мере без нагрузки). Если мы применим синусоидальный алгоритм расчета в модуле ШИМ, то амплитуда максимального фазного напряжения, которое получится у нас сделать, окажется равной половине от напряжения на шине постоянного тока, т.е. 540/2=270В. Пересчитаем в действующее фазное: 270/√2=191В. А теперь в действующее линейное: 191∙√3=330В. Теперь можем сравнить: вошло нам 380В, а вышло 330В… И больше с этим типом ШИМ никак нельзя. Для исправления этой проблемы используется так называемый векторный тип ШИМ. В нем на выходе будут снова 380В (в идеальном случае без учета всех падений напряжения). Метод векторной ШИМ никакого отношения к векторному управлению электродвигателем не имеет. Просто в его обосновании снова используется немного школьной геометрии, поэтому он и называется векторным. Однако его работу на пальцах не объяснить, поэтому отправлю читателя к книжкам (в конце статьи) или к википедии. Могу еще привести картинку, которая немного намекает на разницу в работе синусоидальной и векторной ШИМ (Рисунок 10):
Рисунок 10. Изменение потенциалов фаз для скалярной и векторной ШИМ
Кстати, а какие датчики положения используются для векторного управления? Чаще всего используются четыре типа датчиков. Это квадратурный инкрементальный энкодер, датчик на основе элементов Холла, абсолютный датчик положения и сельсинный датчик.
Квадратурный энкодер не выдает абсолютного положения ротора – по своим импульсам он позволяет лишь определить, сколько вы проехали, но не куда и откуда (как начало и конец связаны с расположением магнита ротора). Поэтому для векторного управления синхронной машиной сам по себе он не подходит. Немного спасает ситуацию его реперная метка (индекс) – она одна на механический оборот, если до неё доехать, то абсолютное положение становится известно, а от неё можно уже отсчитывать сколько проехали квадратурным сигналом. Но как до этой метки доехать в начале работы? В общем, это не всегда удобно.
Датчик на основе элементов Холла – это грубый датчик. Он выдает всего несколько импульсов на оборот (в зависимости от кол-ва элементов Холла, для трехфазных двигателей их обычно три, т.е. шесть импульсов), позволяя знать положение в абсолютной величине, но с низкой точностью. Точности обычно хватает, чтобы держать угол вектора тока так, чтобы двигатель по крайней мере ехал вперед, а не назад, но момент и токи будут пульсировать. Если двигатель разогнался, то можно начать программно экстраполировать сигнал с датчика по времени – т.е. строить из грубого дискретного угла линейно изменяющийся угол. Это делается на основе предположения, что двигатель вращается с примерно постоянной скоростью, как-то так (Рисунок 11):
Рисунок 11. Работа датчика положения на элементах Холла для трехфазной машины и экстраполяция его сигнала
Часто для серводвигателей используется сочетание энкодера и датчика Холла. В этом случае можно сделать единый программный модуль их обработки, убирая недостатки обоих: делать экстраполяцию угла, приведенную выше, но не по времени, а по меткам с энкодера. Т.е. внутри от фронта до фронта датчика Холла работает энкодер, а каждый фронт Холла чётко инициализирует текущее абсолютное угловое положение. В этом случае неоптимальным (не под 90°) окажется лишь первое движение привода, пока он не доехал до какого-нибудь фронта датчика Холла. Отдельную проблему в этом случае представляет обработка неидеальности и того и другого датчика — симметрично и равномерно элементы Холла редко кто располагает…
В еще более дорогих применениях используют абсолютный датчик положения с цифровым интерфейсом (абсолютный энкодер), который сразу выдает абсолютное положение и позволяет не испытывать описанных выше проблем.
Если в электродвигателе очень жарко, а также когда требуется повышенная точность измерения угла, используют «аналоговый» сельсинный датчик (резольвер, вращающийся трансформатор). Это маленькая электрическая машина, используемая как датчик. Представьте, что в рассмотренной нами синхронной машине на рисунке 1 вместо магнитов стоит еще одна катушка, на которую мы подаем высокочастотный сигнал. Если ротор стоит горизонтально, то сигнал наведется только в катушку статора фазы α, если вертикально – то только в β, если перевернуть его на 180 – то изменится фаза сигнала, а в промежуточных положениях наводится и туда и сюда по закону синуса/косинуса. Соответственно, измеряя амплитуду сигнала в двух катушках, по соотношению этой амплитуды и по фазовому сдвигу можно также определять положение. Установив такую машину как датчик к основной, можно узнавать положение ротора.
Есть еще много экзотических датчиков положения, особенно для сверхвысокоточных применений, например, для изготовления электронных чипов. Там в ход идут уже любые физические явления, чтобы только узнать положение наиболее точно. Их рассматривать не будем.
Как вы поняли, векторное управление достаточно требовательное – и датчиков положения ему наставь, и датчиков тока, и ШИМ ему векторную, и микроконтроллер не абы какой, чтобы всю эту математику обсчитывать. Поэтому для простых применений его упрощают. Для начала можно исключить датчик положения, сделав бездатчиковое векторное управление. Для этого используют немного больше математической магии, находящейся в желтом прямоугольнике (Рисунок 12):
Рисунок 12. Структура бездатчикового векторного управления
Наблюдатель – это такой блок, на который подается информация о приложенном к двигателю напряжении (например, из задания на модуль ШИМ) и о токах в двигателе с датчиков. Внутри наблюдателя работает модель электродвигателя, которая, грубо говоря, пытается подстроить свои токи в статоре под измеренные с реального двигателя. Если у неё это получилось, то можно считать, что и положение моделируемого внутри вала ротора тоже совпадает с реальным и им можно пользоваться для нужд векторного управления. Ну это, конечно, совсем упрощённо. Видов наблюдателей таких – не пересчитать. Каждый аспирант по специальности «электропривод» пытается изобрести именно свой, который чем-то лучше других. Основной принцип – отслеживание ЭДС электродвигателя. Поэтому чаще всего бездатчиковая система управления работоспособна только на относительно высокой частоте вращения, где ЭДС большая. А также имеет еще ряд недостатков по сравнению с наличием датчика: нужно знать параметры двигателя, быстродействие привода ограничено (если частота вращения резко меняется, наблюдатель может не успеть её отследить и какое-то время «врать», а то и «развалиться» совсем), настройка наблюдателя – это целая процедура, для его качественной работы нужно точно знать напряжение на двигателе, точно измерять его токи и т.п.
Есть и другой вариант упрощения. Например, можно сделать так называемую «автокоммутацию». В этом случае для трехфазного двигателя отказываются от сложного метода ШИМ, отказываются от сложной векторной структуры и начинают просто включать фазы двигателя по датчику положения на элементах Холла, даже иногда без всякого токоограничения. Ток в фазах получается не синусоидальный, а трапецеидальный, прямоугольный или еще более искаженный. Но стараются сделать так, чтобы средний вектор тока был всё равно под 90 градусов к «магниту ротора» выбором момента включения фаз. При этом, включая фазу под напряжение, неизвестно, когда же в фазе двигателя нарастет ток. На низкой частоте вращения он это делает быстрее, на высокой, где мешает ЭДС машины, медленнее, еще темп нарастания тока зависит от индуктивности двигателя и т.п. Поэтому, даже включая фазы точно в нужный момент времени, совсем не факт, что средний вектор тока окажется в нужном месте и с нужной фазой – он может как опережать, так и запаздывать относительно оптимальных 90 градусов. Поэтому в таких системах вводят настройку «опережения коммутации» – по сути просто время, насколько раньше нужно на фазу двигателя подавать напряжение, чтобы в итоге фаза вектора тока получилась более близка к 90 градусам. По-простому это называют «настройка таймингов». Так как ток в электродвигателе при автокоммутации не синусоидальный, то, если взять рассмотренную выше синусоидальную машину и управлять ей таким вот образом, момент на валу будет пульсировать. Поэтому в двигателях, предназначенных для автокоммутации, часто специальным образом меняют магнитную геометрию ротора и статора, чтобы они стали более подходящими к такому типу управления: ЭДС таких машин делают трапецеидальной, благодаря чему в режиме автокоммутации они работают лучше. Синхронные машины, оптимизированные для автокоммутации, получили название бесколлекторных двигателей постоянного тока (БДПТ) или по-английски BLDC (Brushless Direct Current Motor). Режим автокоммутации также часто называют вентильным режимом, а двигатели с ним работающие – вентильные. Но это всё просто разные названия, ничем не влияющие на суть (но матёрые электроприводчики часто страдают СПГС в вопросах, связанных с этими названиями). Есть неплохое видео, иллюстрирующее принцип работы таких машин. На нем показан обращенный двигатель, где ротор снаружи, а статор внутри:
А вот здесь есть курс статей по таким двигателям и аппаратной части системы управления.
Можно пойти даже на еще большее упрощение. Коммутировать обмотки так, чтобы одна фаза всё время оказывалась «свободна» и к ней не прикладывался ШИМ. Тогда в ней можно измерять ЭДС (наведенное в катушке фазы напряжение), и, когда это напряжение переходит через ноль, использовать это как сигнал датчика положения ротора, потому что фаза этого наведенного напряжения зависит как раз от положения ротора. Получается бездатчиковая автокоммутация, что широко используется в различных простеньких приводах, например, в «регуляторах» для пропеллеров авиамоделей. При этом надо помнить, что ЭДС машины появляется только на относительно высокой частоте вращения, поэтому для старта такие системы управления просто не спеша перебирают фазы, надеясь, что ротор двигателя будет следовать за подаваемым током. Как только ЭДС появилась, включается режим автокоммутации. Поэтому бездатчиковая система (такая простая, да и сложная чаще всего тоже) не подходит для задач, где двигатель должен уметь развивать момент на околонулевых частотах вращения, например, для тягового привода автомобиля (или его модели), сервопривода какого-то механизма и т.п. Зато бездатчиковая система с успехом подходит для насосов и вентиляторов, где как раз и применяется.
Но иногда делают даже и еще большее упрощение. Можно совсем отказаться от микроконтроллера, ключей, датчиков положения и прочего, осуществляя переключение фаз специальным механическим коммутатором (Рисунок 13):
Рисунок 13. Механический коммутатор для переключения обмоток
При вращении ротор сам переключает свои части обмоток, меняя приложенное к ним напряжение, при этом ток в роторе протекает переменный. Коммутатор располагают таким образом, чтобы магнитный поток ротора и статора снова оказывался близким к 90 градусам, дабы достичь максимума момента. Такие двигатели по наивности называют двигателями постоянного тока, но совершенно незаслуженно: внутри-то, после коллектора, ток всё равно переменный!
Все электрические машины работают схожим образом. В теории электропривода даже существует понятие «обобщенная электрическая машина», к которой сводят работу других. Показанные в статье объяснения «на пальцах» никоим образом не могут служить практическим руководством к написанию кода микроконтроллера. В статье рассмотрен хорошо если один процент информации, которая требуется для реализации настоящего векторного управления. Чтобы сделать что-то на практике, нужно, во-первых, знать ТАУ, хотя бы на уровне понимания, как работает ПИ-регулятор. Потом нужно всё-таки изучить математическое описание как синхронной машины, так и синтеза векторного управления. Также изучить векторную ШИМ, узнать, что такое пары полюсов, познакомиться с типами обмоток машин и прочее. Это можно сделать в свежей книге «Анучин А. С. Системы управления электроприводов. МЭИ, 2015», а также в «Калачев Ю. Н. Векторное регулирование (заметки практика)». Следует предостеречь читателя от погружения в формулы «старых» учебников по приводу, где основной упор сделан на рассмотрение характеристик электродвигателей при питании напрямую от трехфазной промышленной сети, без всяких микроконтроллеров и датчиков положения. Поведение двигателей в этом случае описывается сложными формулами и зависимостями, но для задачи векторного управления они почти никакой пользы не несут (если только изучить для саморазвития). Особенно следует с осторожностью относиться к рекомендациям старых учебников, где, например, сказано, что синхронная машина не должна работать на максимуме своего момента, так как там работа неустойчива и грозит опрокидыванием – для векторного управления всё это «вредные советы».
На каком микроконтроллере можно сделать полноценное векторное управление, читайте, например, в нашей статье Новый отечественный motor-control микроконтроллер К1921ВК01Т ОАО «НИИЭТ», а как это отлаживать в статье Способы отладки ПО микроконтроллеров в электроприводе. Также заходите на наш сайт: там, в частности, выложено два занудных видео, где показано на практике, как настроить ПИ-регулятор тока, а также как работает замкнутая по току и векторная бездатчиковая структура управления. Кроме того, можно приобрести отладочный комплект с готовой датчиковой векторной структурой управления на отечественном микроконтроллере.
Продолжение статьи, где рассказано про асинхронные двигатели здесь.
P.S.
У специалистов прошу прощения за не совсем корректное обращение с некоторыми терминами, в частности с терминами «поток», «потокосцепление», «магнитное поле» и другими – простота требует жертв…
Поставщики и ресурсы беспроводной связи RF
О компании RF Wireless World
Веб-сайт RF Wireless World является домом для поставщиков и ресурсов радиочастотной и беспроводной связи. На сайте представлены статьи, руководства, поставщики, терминология, исходный код (VHDL, Verilog, MATLAB, Labview), тестирование и измерения, калькуляторы, новости, книги, загрузки и многое другое.
Сайт RF Wireless World охватывает ресурсы по различным темам, таким как RF, беспроводная связь, vsat, спутник, радар, волоконная оптика, микроволновая печь, wimax, wlan, zigbee, LTE, 5G NR, GSM, GPRS, GPS, WCDMA, UMTS, TDSCDMA, bluetooth, Lightwave RF, z-wave, Интернет вещей (IoT), M2M, Ethernet и т. Д.Эти ресурсы основаны на стандартах IEEE и 3GPP. В нем также есть академический раздел, который охватывает колледжи и университеты по инженерным дисциплинам и MBA.
Статьи о системах на основе Интернета вещей

Система обнаружения падений для пожилых людей на основе Интернета вещей : В статье рассматривается архитектура системы обнаружения падений, используемой для пожилых людей.
В нем упоминаются преимущества или преимущества системы обнаружения падений Интернета вещей.
Узнать больше➤
Также обратитесь к другим статьям о системах на основе Интернета вещей следующим образом:
• Система чистоты туалетов самолета.
• Система измерения столкновения
• Система отслеживания скоропортящихся продуктов и овощей
• Система помощи водителю
• Система умной торговли
• Система мониторинга качества воды.
• Система Smart Grid
• Система умного освещения на базе Zigbee
• Система интеллектуальной парковки на основе Zigbee.
• Система интеллектуальной парковки на основе LoRaWAN
RF Статьи о беспроводной связи
В этом разделе статей представлены статьи о физическом уровне (PHY), уровне MAC, стеке протоколов и сетевой архитектуре на основе WLAN, WiMAX, zigbee, GSM, GPRS, TD-SCDMA, LTE, 5G NR, VSAT, Gigabit Ethernet на основе IEEE / 3GPP и т. Д. .стандарты. Он также охватывает статьи, относящиеся к испытаниям и измерениям, по тестированию на соответствие, используемым для испытаний устройств на соответствие RF / PHY. УКАЗАТЕЛЬ СТАТЕЙ >>.
Физический уровень 5G NR : Обработка физического уровня для канала 5G NR PDSCH и канала 5G NR PUSCH рассмотрена поэтапно. Это описание физического уровня 5G соответствует спецификациям физического уровня 3GPP. Читать дальше➤
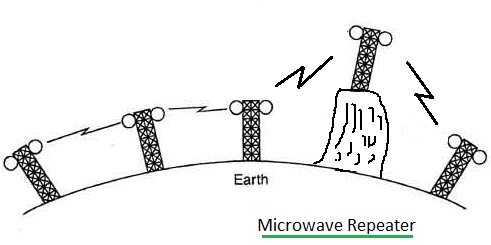
Основы повторителей и типы повторителей : В нем объясняются функции различных типов ретрансляторов, используемых в беспроводных технологиях.Читать дальше➤
Основы и типы замирания : В этой статье рассматриваются мелкомасштабные замирания, крупномасштабные замирания, медленные, быстрые и т. Д., Которые используются в беспроводной связи. Читать дальше➤
Архитектура сотового телефона 5G : В этой статье рассматривается блок-схема сотового телефона 5G с внутренними модулями 5G. Архитектура сотового телефона. Читать дальше➤
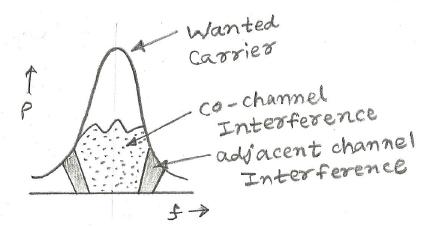
Основы помех и типы помех: В этой статье рассматриваются помехи в соседнем канале, помехи в одном канале, ЭМ помехи, ICI, ISI, световые помехи, звуковые помехи и т. Д.Читать дальше➤
5G NR Раздел
В этом разделе рассматриваются функции 5G NR (New Radio), нумерология, диапазоны, архитектура, развертывание, стек протоколов (PHY, MAC, RLC, PDCP, RRC) и т. Д.
5G NR Краткий указатель ссылок >>
• Мини-слот 5G NR
• Часть полосы пропускания 5G NR
• 5G NR CORESET
• Форматы DCI 5G NR
• 5G NR UCI
• Форматы слотов 5G NR
• IE 5G NR RRC
• 5G NR SSB, SS, PBCH
• 5G NR PRACH
• 5G NR PDCCH
• 5G NR PUCCH
• Эталонные сигналы 5G NR
• 5G NR m-последовательность
• Золотая последовательность 5G NR
• 5G NR Zadoff Chu Sequence
• Физический уровень 5G NR
• Уровень MAC 5G NR
• Уровень 5G NR RLC
• Уровень 5G NR PDCP
Учебные пособия по беспроводным технологиям
В этом разделе рассматриваются учебные пособия по радиочастотам и беспроводной связи.Он охватывает учебные пособия по таким темам, как сотовая связь, WLAN (11ac, 11ad), wimax, bluetooth, zigbee, zwave, LTE, DSP, GSM, GPRS, GPS, UMTS, CDMA, UWB, RFID, радар, VSAT, спутник, WLAN, волновод, антенна, фемтосота, тестирование и измерения, IoT и т. Д. См. УКАЗАТЕЛЬ >>
Учебное пособие по 5G — В этом учебном пособии по 5G также рассматриваются следующие подтемы по технологии 5G:
Руководство по основам 5G
Полосы частот
руководство по миллиметровым волнам
Волновая рама 5G мм
Зондирование волнового канала 5G мм
4G против 5G
Тестовое оборудование 5G
Сетевая архитектура 5G
Сетевые интерфейсы 5G NR
канальное зондирование
Типы каналов
5G FDD против TDD
Разделение сети 5G NR
Что такое 5G NR
Режимы развертывания 5G NR
Что такое 5G TF
Этот учебник GSM охватывает основы GSM, архитектуру сети, элементы сети, системные спецификации, приложения,
Типы пакетов GSM, структура кадров GSM или иерархия кадров, логические каналы, физические каналы,
Физический уровень GSM или обработка речи, вход в сеть мобильного телефона GSM, установка вызова или процедура включения питания,
MO-вызов, MT-вызов, VAMOS, AMR, MSK, модуляция GMSK, физический уровень, стек протоколов, основы мобильного телефона,
Планирование RF, нисходящая линия связи PS и восходящая линия связи PS.
➤Подробнее.
LTE Tutorial , охватывающий архитектуру системы LTE, охватывающий основы LTE EUTRAN и LTE Evolved Packet Core (EPC). Он обеспечивает связь с обзором системы LTE, радиоинтерфейсом LTE, терминологией LTE, категориями LTE UE, структурой кадра LTE, физическим уровнем LTE, Стек протоколов LTE, каналы LTE (логические, транспортные, физические), пропускная способность LTE, агрегация несущих LTE, передача голоса по LTE, расширенный LTE, Поставщики LTE и LTE vs LTE продвинутые.➤Подробнее.
RF Technology Stuff
Эта страница мира беспроводной радиосвязи описывает пошаговое проектирование преобразователя частоты RF на примере преобразователя RF UP от 70 МГц до диапазона C.
для микрополосковой платы с использованием дискретных радиочастотных компонентов, а именно. Смесители, гетеродин, MMIC, синтезатор, опорный генератор OCXO,
колодки аттенюатора. ➤Подробнее.
➤Проектирование и разработка радиочастотного трансивера
➤Конструкция RF фильтра
➤VSAT Система
➤Типы и основы микрополосковой печати
➤Основы волновода
Секция испытаний и измерений
В этом разделе рассматриваются контрольно-измерительные ресурсы, испытательное и измерительное оборудование для тестирования DUT на основе
Стандарты WLAN, WiMAX, Zigbee, Bluetooth, GSM, UMTS, LTE.ИНДЕКС испытаний и измерений >>
➤ Система PXI для T&M.
➤ Генерация и анализ сигналов
➤Измерения слоя PHY
➤Тест устройства на соответствие WiMAX
➤ Тест на соответствие Zigbee
➤ Тест на соответствие LTE UE
➤Тест на соответствие TD-SCDMA
Волоконно-оптическая технология
Оптоволоконный компонент , основы, включая детектор, оптический соединитель, изолятор, циркулятор, переключатели, усилитель,
фильтр, эквалайзер, мультиплексор, разъемы, демультиплексор и т. д.Эти компоненты используются в волоконно-оптической связи.
Оптические компоненты INDEX >>
➤Учебное пособие по оптоволоконной связи
➤APS в SDH
➤SONET основы
➤SDH Рамочная конструкция
➤SONET против SDH
Поставщики и производители беспроводных радиочастотных устройств
Сайт RF Wireless World охватывает производителей и поставщиков различных компонентов, систем и подсистем RF для ярких приложений, см. ИНДЕКС поставщиков >>.
Поставщики радиочастотных компонентов, включая радиочастотный изолятор, радиочастотный циркулятор, радиочастотный смеситель, радиочастотный усилитель, радиочастотный адаптер, радиочастотный разъем, радиочастотный модулятор, радиочастотный трансивер, PLL, VCO, синтезатор, антенну, генератор, делитель мощности, сумматор мощности, фильтр, аттенюатор, диплексор, дуплексер, чип резистор, чип конденсатор, индуктор чипа, ответвитель, оборудование EMC, программное обеспечение RF Design, диэлектрический материал, диод и т. д.Производители RF компонентов >>
➤Базовая станция LTE
➤RF Циркулятор
➤RF Изолятор
➤Кристаллический осциллятор
MATLAB, Labview, встроенные исходные коды
Раздел исходного кода RF Wireless World охватывает коды, связанные с языками программирования MATLAB, VHDL, VERILOG и LABVIEW.
Эти коды полезны для новичков в этих языках.
ИНДЕКС ИСХОДНОГО КОДА >>
➤3-8 декодер кода VHDL
➤Код MATLAB для дескремблера
➤32-битный код ALU Verilog
➤T, D, JK, SR триггеры labview коды
* Общая информация о здоровье населения *
Выполните эти пять простых действий, чтобы остановить коронавирус (COVID-19).
СДЕЛАЙТЕ ПЯТЬ
1. РУКИ: Часто мойте их.
2. КОЛЕНО: Откашляйтесь
3. ЛИЦО: не трогайте его
4. НОГИ: держитесь на расстоянии более 3 футов (1 м) друг от друга
5. ЧУВСТВОВАТЬ: Болен? Оставайся дома
Используйте технологию отслеживания контактов >>, соблюдайте >> рекомендации по социальному дистанцированию и установить систему наблюдения за данными >> чтобы спасти сотни жизней. Использование концепции телемедицины стало очень популярным в таким странам, как США и Китай, чтобы остановить распространение COVID-19, поскольку это заразное заболевание.
RF Калькуляторы и преобразователи беспроводной связи
Раздел «Калькуляторы и преобразователи» охватывает ВЧ-калькуляторы, беспроводные калькуляторы, а также преобразователи единиц.
Это касается беспроводных технологий, таких как GSM, UMTS, LTE, 5G NR и т. Д.
СПРАВОЧНЫЕ КАЛЬКУЛЯТОРЫ Указатель >>.
➤ Калькулятор пропускной способности 5G NR
➤5G NR ARFCN против преобразования частоты
➤Калькулятор скорости передачи данных LoRa
➤LTE EARFCN для преобразования частоты
➤ Калькулятор антенны Яги
➤ Калькулятор времени выборки 5G NR
IoT-Интернет вещей Беспроводные технологии
Раздел IoT охватывает беспроводные технологии Интернета вещей, такие как WLAN, WiMAX, Zigbee, Z-wave, UMTS, LTE, GSM, GPRS, THREAD, EnOcean, LoRa, SIGFOX, WHDI, Ethernet,
6LoWPAN, RF4CE, Bluetooth, Bluetooth Low Power (BLE), NFC, RFID, INSTEON, X10, KNX, ANT +, Wavenis, Dash7, HomePlug и другие.Он также охватывает датчики Интернета вещей, компоненты Интернета вещей и компании Интернета вещей.
См. Главную страницу IoT >> и следующие ссылки.
➤ НИТЬ
➤EnOcean
➤Учебник по LoRa
➤Учебник по SIGFOX
➤WHDI
➤6LoWPAN
➤Zigbee RF4CE
➤NFC
➤Lonworks
➤CEBus
➤UPB
СВЯЗАННЫЕ ЗАПИСИ
RF Wireless Учебники
Различные типы датчиков
Поделиться страницей
Перевести
.
Аналого-цифровой преобразователь (АЦП)
Что такое аналого-цифровой преобразователь (АЦП)? Блок-схема, факторы и применение АЦП
Что такое АЦП (аналого-цифровой преобразователь)?
ADC означает аналого-цифровой преобразователь . Это электронное устройство, используемое для преобразования аналогового сигнала в цифровой сигнал .
Аналоговый входной сигнал АЦП — непрерывный сигнал времени и непрерывный сигнал амплитуды .Выходной сигнал АЦП представляет собой цифровой сигнал дискретного времени и дискретной амплитуды .
Почему АЦП?
В реальном мире каждая реальная величина, такая как голос, температура, вес и т.д., существует в аналоговом состоянии . И он не может быть обработан никаким цифровым устройством, таким как компьютер или сотовый телефон.
Эти аналоговые величины преобразуются в цифровую форму, чтобы цифровое устройство могло их обработать. Это преобразование выполняется с помощью аналого-цифрового преобразователя .
Блок-схема АЦП
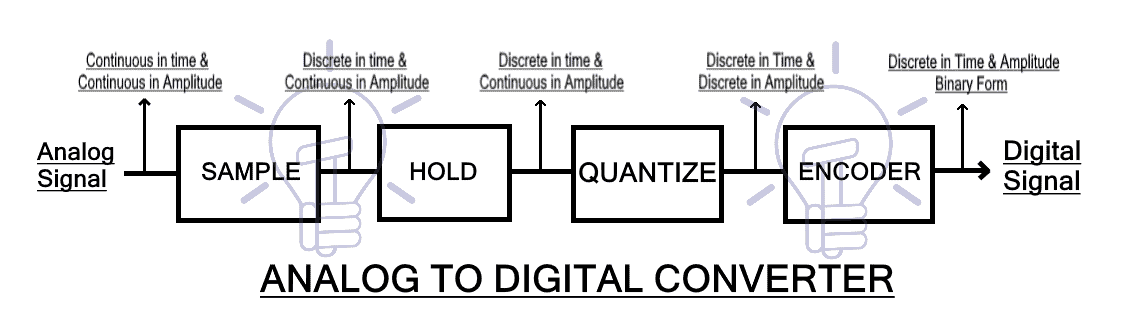
Аналоговый сигнал сначала применяется к блоку « sample », где он дискретизируется с определенной частотой дискретизации. Значение амплитуды выборки поддерживается и удерживается в блоке « hold ». Это аналоговое значение. Удерживаемая выборка квантуется до дискретного значения блоком « quantize ». Наконец, «кодировщик » преобразует дискретную амплитуду в двоичное число.
Шаги аналого-цифрового преобразования
Преобразование аналогового сигнала в цифровой в аналого-цифровом преобразователе поясняется ниже с использованием блок-схемы, приведенной выше.
Sample
Функция блока sample состоит в том, чтобы выполнить выборку входного аналогового сигнала через определенный интервал времени. Образцы берутся с непрерывной амплитудой и имеют реальное значение, но они являются дискретными относительно времени .
Частота дискретизации играет важную роль в преобразовании. Таким образом, он поддерживается с определенной скоростью. Частота дискретизации устанавливается в соответствии с требованиями системы.
Hold
Второй блок, используемый в АЦП, — это блок « Hold».У него нет функции. Он сохраняет только амплитуду образца до тех пор, пока не будет взят следующий образец. Значение удержания остается неизменным до следующей выборки.
Quantize
Этот блок используется для квантования . Он преобразует аналоговую или непрерывную амплитуду в дискретную.
Постоянное значение амплитуды при удержании в блоке удержания проходит через блок « квантования» и становится дискретным с амплитудой . Сигнал теперь в цифровой форме, так как он имеет дискретное время и дискретную амплитуду .
Encoder
Блок encoder преобразует цифровой сигнал в двоичную форму , то есть в биты.
Как мы знаем, цифровые устройства работают с двоичными сигналами, поэтому необходимо преобразовать цифровой сигнал в двоичную форму с помощью кодировщика.
Это весь процесс преобразования аналогового сигнала в цифровую форму с помощью аналого-цифрового преобразователя . Все это преобразование происходит за микросекунду.
Коэффициенты АЦП
Разрешение:
Разрешающая способность АЦП — это битов , которые представляют амплитуду цифрового сигнала.
Аналоговый сигнал имеет непрерывную амплитуду. Он может иметь бесконечных значения , т.е. реальные, плавающие практически любые значения, которые только можно представить. С другой стороны, цифровой сигнал имеет дискретное и конечное число значений. Эти дискретные значения представлены с помощью двоичных чисел (битов).
Чтобы лучше понять идею разрешения ADC ,
На рисунке выше показан аналоговый сигнал, представленный в цифровом виде, который равен 0 или 1. Это разрешение 1 бит. Разрешение для ADC определяет его шагов .
количество шагов = 2 n
Где n — количество бит. Следовательно, есть 2 шага в 1-битном разрешении.
На этом рисунке показано преобразование аналогового сигнала в цифровой с разрешением 2 бита. Есть 4 шага или уровней квантования .
Количество шагов = 2 n = 2 2 = 4
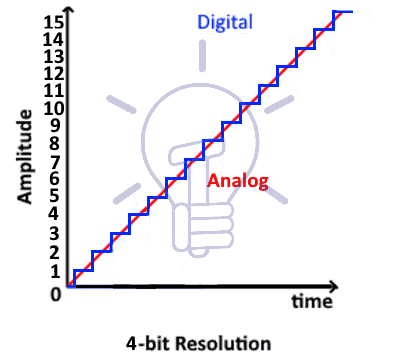
На этом рисунке показано 4-битное разрешение. Число шагов при 4-битном разрешении составляет 16.
Кол-во шагов = 2 n = 2 4 = 16
Число шагов увеличивается на экспоненциально с увеличением разрешения бит .Это также означает, что при увеличении разрешения в битах преобразованный цифровой сигнал становится больше похожим на исходный аналоговый сигнал. Так что в идеале мы можем сказать, что цифровой сигнал с бесконечным разрешением является аналоговым сигналом.
Связанное сообщение: Введение в сигналы, типы, свойства, работу и приложение
Ширина шага
Разность напряжений между двумя соседними шагами известна как ширина шага .Обозначается он Δv .
Таким образом, один шаг представляет фиксированное напряжение , что составляет
Δv = v ref /2 n
Где v ref — максимальное преобразованное напряжение, а n — бит разрешения.
Например:
v ref = 10,24v & n = 10 бит
Тогда:
Δv = 10,24 / 2 10
Δv = 10.24/1024
Δv = 0,01v
Таким образом, размер шага или ширина шага составляет 0,01v . В этом АЦП увеличение на один бит соответствует увеличению аналогового входа на 0,01 В на . Если аналоговый вход увеличивается на 0,01 В , то выход увеличивается на 1 бит.
Ошибка квантования
АЦП обновляет свое значение, если увеличение или уменьшение его входного напряжения превышает Δv / 2 .Любое изменение менее Δv / 2 не будет зарегистрировано. Это известно как ошибка квантования .
Другими словами, разница между вводом и цифрой цифрового округления вывода известна как ошибка квантования.
Увеличение разрешения АЦП уменьшает размер шага , если v ref остается постоянным. Следовательно, ошибка квантования уменьшается.
Частота дискретизации
Число отсчетов, взятых в течение одной секунды, известно как частота дискретизации или частота дискретизации .
Частота дискретизации должна быть установлена в соответствии с входным сигналом. Это не должно быть очень низкое или очень высокое .
Пример выборки:
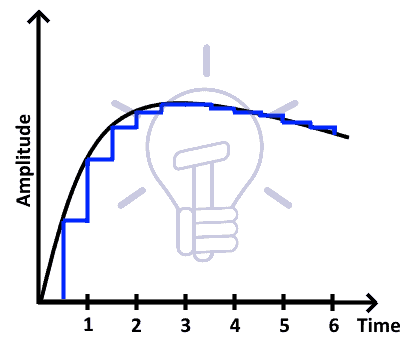
В этом примере показано, что частота выборки составляет 0,5 секунды, так как требуется 2 выборки за одну секунду.
Наложение
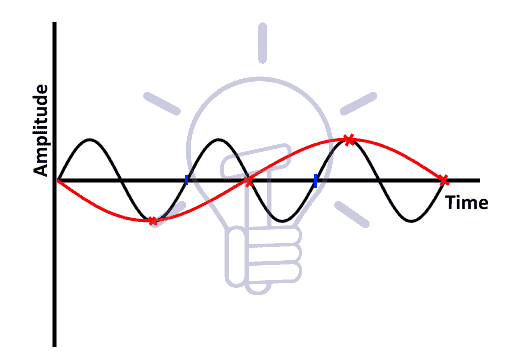
Если частота дискретизации очень низкая , то результирующий сигнал не будет похож на исходный сигнал.Фактически, после реконструкции он станет другим сигналом. Эта проблема известна как псевдонимов .
Чтобы избежать этой проблемы, частота дискретизации должна быть на выше , чем , вдвое превышающей частоту входного сигнала. Фильтры сглаживания также используются для удаления частотных составляющих, превышающих половину частоты дискретизации. он блокирует выборку компонентов сглаживания.
Критерии Найквиста
Критерии Найквиста предполагают минимальную возможную частоту дискретизации для аналогового сигнала, которая может быть успешно восстановлена .Если наивысшая частота аналогового сигнала равна f , сигнал может быть успешно восстановлен из его выборок, если выборки взяты с частотой дискретизации более 2f .
Смещение
Смещение в АЦП — это смещение на цифровом выходе. Например, для входа v в = 0 выход не обязательно может быть цифровым 0 . Это может быть цифровой 5 , который будет смещением ADC .
Связанное сообщение: Что такое квантование и семплирование? Типы и законы сжатия
Применение ADC
В современном мире растущих технологий мы зависим от цифровых устройств. Эти цифровые устройства работают с цифровым сигналом. Но не все величины находятся в цифровой форме, вместо этого они находятся в аналоговой форме. Таким образом, АЦП используется для преобразования аналоговых сигналов в цифровые. приложений ADC безграничны. Некоторые из этих приложений приведены ниже:
- Сотовые телефоны работают с цифровым голосовым сигналом.Первоначально голос был в аналоговой форме, которая преобразуется через АЦП перед подачей на передатчик сотового телефона.
- Изображения и видео , снятые с помощью камеры, сохраняются на любом цифровом устройстве, также преобразуются в цифровую форму с помощью АЦП.
- Медицинская визуализация, такая как рентгеновский снимок и MRI также использует ADC для преобразования изображений в цифровую форму перед изменением. Затем они модифицируются для лучшего понимания.
- Музыка с кассеты также преобразуется в цифровую форму, например, компакт-дисков и флэш-накопители с помощью преобразователей ADC .
- Цифровой осциллограф также содержит АЦП для преобразования аналогового сигнала в цифровой сигнал для отображения и различных других функций.
- Кондиционер содержит датчиков температуры для поддержания температуры в помещении. Эта температура преобразуется в цифровую форму с помощью АЦП, чтобы встроенный контроллер мог считывать и регулировать эффект охлаждения.
В сегодняшнем современном мире почти каждое устройство превратилось в цифровую версию самого себя, и в них должен быть АЦП.Потому что он должен работать в цифровой области, которую можно получить только с помощью аналого-цифрового преобразователя (АЦП) .
Похожие сообщения:
.3 Объяснение схем преобразователя частоты в напряжение
Как следует из названия, преобразователи частоты в напряжение — это устройства, которые преобразуют входную переменную частоту в соответствующие уровни выходного напряжения.
Здесь мы изучаем три простых, но продвинутых проекта с использованием IC 4151, IC VFC32 и IC LM2907.
1) Использование IC 4151
Эта схема преобразователя напряжения частоты, использующая IC 4151, характеризуется высокой степенью линейности преобразования. При указанных значениях частей коэффициент преобразования схемы может быть около 1 В / кГц.
Когда на входе используется напряжение постоянного тока с частотой 0 Гц, на выходе генерируется соответствующее напряжение 0 В. Коэффициент преобразования на выходе никогда не зависит от рабочего цикла входной квадратной средней частоты.
Но, если на вход подается синусоидальная частота, в этой ситуации сигнал должен быть пропущен через триггер Шмитта, прежде чем подавать его на вход IC 4151.
Если вас интересует другой коэффициент преобразования, вы можете рассчитать его по следующей формуле:
В (выход) / f (вход) = R3 x R7 x C2 / 0.486 (R4 + P1) x [В / Гц]
T1 = 1,1 x R3 x C2
Цепь может быть даже подключена к выходу преобразователя напряжения в частоту и использоваться как способ отправки сигналов постоянного тока по удлиненному кабелю подключение без проблем с сопротивлением кабеля, ослабляющим сигнал.
2) Использование конфигурации VFC32
В предыдущем посте объяснялась простая однокристальная схема преобразователя напряжения в частоту с использованием микросхемы VFC32, здесь мы узнаем, как ту же микросхему можно использовать для достижения частоты, противоположной схеме преобразователя напряжения.
На рисунке ниже изображена другая стандартная конфигурация VFC32, которая позволяет ему работать как схема преобразователя частоты в напряжение.
Входной каскад, образованный емкостной цепью C3, R6 и R7, обеспечивает совместимость входа компаратора со всеми логическими триггерами 5 В. Компаратор, в свою очередь, переключает соответствующий одноразовый каскад на каждом заднем фронте подаваемых входных импульсов частоты.
Принципиальная схема
Пороговое значение входного задания, установленное для компаратора детектора, составляет около –0.7В. В случае, когда входные частоты может быть ниже, чем 5 В, потенциал делитель R6 / R7, может быть соответствующим образом скорректированы для изменения опорного уровня и для обеспечения надлежащего обнаружения входов низких частот уровня на операционных усилителях.
Как показано на графике в предыдущей статье, значение C1 может быть выбрано в зависимости от полного диапазона триггеров частотного входа.
C2 отвечает за фильтрацию и сглаживание формы волны выходного напряжения, более высокие значения C2 помогают добиться лучшего контроля над пульсациями напряжения на сгенерированном выходе, но отклик медленный на быстро изменяющиеся входные частоты, тогда как меньшие значения C2 вызывают плохую фильтрацию но предлагают быстрый отклик и настройку с быстро меняющимися входными частотами.
ЗначениеR1 можно настроить для достижения настраиваемого диапазона выходного напряжения полного отклонения относительно заданного диапазона входной частоты полного диапазона.
Как работает схема преобразователя частоты в напряжение
Основная работа предлагаемой схемы преобразователя частоты в напряжение основана на теории заряда и баланса. Частота входного сигнала вычисляется так, чтобы соответствовать выражению V) (in) / R1, и это значение обрабатывается соответствующим операционным усилителем IC посредством интегрирования с помощью C2.Результат этого интегрирования приводит к падению выходного напряжения интегрирования рампы.
Пока происходит вышеупомянутое, срабатывает следующий каскад однократного включения, соединяя опорный ток 1 мА со входом интегратора в ходе одноразового режима.
Это, в свою очередь, переворачивает характеристику линейного изменения выходного сигнала и заставляет его подниматься вверх, это продолжается, пока включен однократный режим, и как только его период истекает, линейное изменение снова вынуждено изменить свое направление и заставляет вернуться к нисходящий падающий узор.
Расчет частоты
Вышеупомянутый процесс колебательного отклика обеспечивает устойчивый баланс заряда (среднего тока) между током входного сигнала и опорным током, который решается с помощью следующего уравнения:
I (дюйм) = IR (средн. )
В (дюйм) / R1 = fo tos
(1 мА)
Где fo — частота на выходе, t — период однократного импульса = 7500 C1 (Frarads)
Значения R1 и C1 выбираются соответствующим образом, чтобы в результате рабочий цикл составляет 25% в полном диапазоне выходной частоты.Для FSD, который может быть выше 200 кГц, рекомендуемые значения будут генерировать около 50% рабочего цикла.
Рекомендации по применению:
Наилучшей областью применения для описанной выше схемы преобразователя частоты в напряжение является то, где требуется преобразование данных частоты в данные напряжения.
Например, эту схему можно использовать в тахометрах, а также для измерения скоростей двигателей в диапазонах напряжения.
Таким образом, эту схему можно использовать для изготовления простых спидометров для двухколесных транспортных средств, включая велосипеды и т. Д.
Обсуждаемую ИС можно также использовать для создания простых, недорогих, но точных частотомеров в домашних условиях, используя вольтметры для считывания выходного преобразования.
3) Использование микросхемы LM2917
Это еще одна отличная серия микросхем, которую можно использовать для множества различных схем. По сути, это микросхема преобразователя частоты в напряжение (тахометр) со множеством интересных функций. Узнаем больше.
Основные электрические характеристики
Основные характеристики микросхем LM2907 и LM2917 подчеркнуты следующим образом:
- Входной вывод тахометра, который привязан к земле, можно напрямую сделать совместимым со всеми видами магнитных датчиков с различным сопротивлением.
- Выходной вывод связан с внутренним транзистором общего коллектора, который может потреблять до 50 мА. Это может управлять даже реле или соленоидом напрямую без внешних буферных транзисторов, светодиоды и лампы также могут быть интегрированы с выходом, включая входы CMOS.
- Чип может удваивать низкие частоты пульсации.
- Входы тахометра имеют встроенный гистерезис.
- Вход тахометра с заземлением полностью защищен от колебаний входной частоты, превышающих напряжение питания ИС или отрицательного потенциала ниже нуля.
Детали распиновки различных доступных корпусов микросхем LM2907 и LM2917 можно увидеть на приведенных ниже изображениях:
Основные области применения этой микросхемы:
- Измерение скорости: может использоваться для определения вращения скорость или скорость движущегося элемента
- Преобразователи частоты: для преобразования частоты в линейно изменяющуюся разность потенциалов
- Сенсорные переключатели на основе вибрации
Автомобильная промышленность
Чип становится особенно полезным в автомобильной области, как указано ниже:
- Спидометры: в транспортных средствах для измерения скорости.
- Измерители выдержки в точке прерывания: также приложение для измерения параметров двигателя транспортного средства.
- Handy Tachometer: чип можно использовать для изготовления портативных тахометров.
- Контроллеры скорости: устройство может применяться в устройствах контроля скорости или регулирования скорости.
- Другие интересные применения LM2907 / LM2917 IC включают: круиз-контроль, управление замками автомобильных дверей, управление сцеплением, управление звуковым сигналом.
Абсолютные максимальные номинальные значения
(то есть номиналы, которые нельзя превышать, для ИС)
- Напряжение питания = 28 В
- Ток питания = 25 мА
- Напряжение коллектора внутреннего транзистора = 28 В
- Дифференциальный тахометр входное напряжение = 28 В
- Диапазон входного напряжения = +/- 28 В
- Рассеиваемая мощность = от 1200 до 1500 мВт
Другие электрические параметры
Прирост напряжения = 200 В / мВ
Выходной ток стока = от 40 до 50 мА
Отличительные особенности и преимущества этой микросхемы
- Выход не реагирует на нулевые частоты и выдает нулевое напряжение на выходе.
- Выходное напряжение можно просто рассчитать по формуле: VOUT = fIN × VCC × Rx × Cx
- Простая RC-цепочка определяет функцию удвоения частоты IC.
- Встроенный стабилитрон обеспечивает регулируемое и стабилизированное преобразование частоты в напряжение или ток (только в LM2917)
Типичная схема подключения микросхемы LM2907 / LM2917 показана ниже:
Для получения дополнительной информации вы можете сослаться на эту статью
О Swagatam
Я инженер-электронщик (dipIETE), любитель, изобретатель, разработчик схем / печатных плат, производитель.Я также являюсь основателем веб-сайта: https://www.homemade-circuits.com/, где я люблю делиться своими инновационными идеями и руководствами по схемам.
Если у вас есть какие-либо вопросы, связанные со схемами, вы можете взаимодействовать с ними через комментарии, я буду очень рад помочь!
Меняющийся ландшафт компонентов смешивания частот
Постоянные инновации в полупроводниковых процессах и технологиях упаковки ВЧ полностью изменили способы разработки инженеров ВЧ-, СВЧ- и миллиметровых диапазонов. Потребности разработчиков ВЧ в технической и проектной поддержке более конкретны и продвинуты, чем когда-либо прежде. Технологии проектирования продолжают развиваться, и в ближайшем будущем природа ВЧ- и СВЧ-компонентов сильно изменится. В этой статье описаны различные типы смесителей, их преимущества и недостатки, а также их развивающееся применение на разных рынках.В нем обсуждается меняющийся ландшафт для различных компонентов частотного микширования, в первую очередь смесителей, и то, как достижения в области технологий меняют потребности различных сегментов рынка.
Введение
В ВЧ- и СВЧ-схемах смешение частот является одним из наиболее важных участков сигнальной цепи. В прошлом многие приложения были ограничены производительностью микшера. Диапазон частот, потери преобразования и линейность смесителя определяли, можно ли использовать смеситель для данного приложения или нет.Разработка для частот выше 30 ГГц была сложной, а упаковка устройств на этих частотах была еще сложнее. В большинстве случаев простые смесители с одинарной, двойной и тройной балансировкой удовлетворяли потребности рынка в целом. Но по мере того, как компании разрабатывали более продвинутые приложения и стремились повысить производительность на каждый дБ, традиционные смесители просто не подходили. Рынок сегодня и в будущем нуждается в решениях для смешивания частот, которые специально подходят для каждого приложения, оптимизированы для производительности и поддерживают общие конструкции на основе платформ, которые можно повторно использовать снова и снова.
В зависимости от типа приложения и конечного рынка у дизайнеров сегодня очень разные потребности. В целом, большинству разработчиков сейчас нужны широкополосные характеристики, повышенная линейность, более высокая степень интеграции с другими компонентами в сигнальной цепи и более низкое энергопотребление. Но в зависимости от сегментов рынка приоритет каждого из этих критериев может быть разным.
Смесители различных типов и преобразователи частоты
Прежде чем обсуждать применение смесителей и преобразователей частоты на различных рынках, может быть полезно понять основные характеристики различных типов смесителей.Как следует из названия, микшер смешивает два входных сигнала для генерации суммы или разности их частот. Когда смеситель используется для генерации более высокой выходной частоты, чем входной сигнал (путем сложения двух частот), это называется повышающим преобразованием. И когда смеситель используется для генерации более низкой выходной частоты, чем входной сигнал, это называется понижающим преобразованием.
В следующем разделе объясняется дизайн высокого уровня, а также плюсы и минусы часто используемых типов миксеров.
Одиночные, двойные и тройные сбалансированные пассивные смесители
Наиболее распространенным типом миксеров являются пассивные миксеры.Эти миксеры бывают разных стилей дизайна, таких как односторонние, одинарные, двойные и тройные. Наиболее широко используемая архитектура — это двухбалансный смеситель. Этот микшер популярен, поскольку он обеспечивает хорошую производительность, предлагает простую реализацию и архитектуру, а также является экономичным выбором конструкции с множеством доступных опций.
Пассивные смесителиобычно известны своей простотой, поскольку они не требуют внешнего источника постоянного тока (постоянного тока) или специальных настроек.Эти микшеры также известны своей широкой полосой пропускания, хорошим динамическим диапазоном, низким коэффициентом шума (NF) и хорошей изоляцией между портами. Конструкция этих смесителей и их преимущество, заключающееся в отсутствии требований к внешнему питанию постоянного тока, приносят им пользу, обеспечивая низкий коэффициент мощности на выходе смесителя. Хорошее практическое правило состоит в том, что коэффициент шума в пассивном смесителе равен его потерям преобразования. Эти смесители хорошо подходят для приложений с низкими требованиями к системе NF, которые не могут обеспечить активные смесители. Еще одна область, в которой эти смесители выделяются, — это конструкции с высокой частотой и широкой полосой пропускания.Они могут обеспечить хорошую производительность в частотных диапазонах от РЧ до частот миллиметрового диапазона. Еще одна важная спецификация микшера — изоляция между разными портами. Эта спецификация часто определяет тип микшера, который можно использовать в приложении. Пассивные смесители с тройной балансировкой обычно обеспечивают наилучшую изоляцию, но имеют сложную архитектуру и ограничены другими характеристиками, такими как линейность. Двойной балансный пассивный микшер обеспечивает хорошую изоляцию между портами, предлагая при этом более простую архитектуру.Двойной балансный смеситель предлагает оптимальное сочетание изоляции, линейности и коэффициента шума для большинства приложений.
С точки зрения всей сигнальной цепи линейность (также обычно измеряемая как IIP3 — точка перехвата третьего порядка) является одной из наиболее важных спецификаций в проектах RF и микроволновых устройств. Пассивные смесители обычно известны своей высокой линейностью. К сожалению, для достижения оптимальной производительности пассивным смесителям требуется большая входная мощность гетеродина. В большинстве пассивных смесителей используются диоды или транзисторы на полевых транзисторах, и для них требуется мощность гетеродина от 13 до 20 дБмВт, что для некоторых случаев может быть довольно высоким.Высокие требования к мощности гетеродина — одно из основных недостатков пассивных смесителей. Еще один недостаток, связанный с пассивными смесителями, — это потери преобразования на выходе смесителя. Эти микшеры представляют собой пассивные элементы без блоков усиления; в результате выход смесителя имеет тенденцию иметь большие потери сигнала. Например, если входная мощность смесителя равна 0 дБм, а потери преобразования смесителя составляют 9 дБ, выход смесителя будет составлять –9 дБмВт. В целом, эти смесители очень хорошо подходят для тестирования и измерений, а также для военного рынка, о чем мы поговорим позже в этой статье.
Преимущества пассивных смесителей
- Широкая полоса пропускания
- Расширенный динамический диапазон
- Низкий уровень шума
- Высокая изоляция порта от порта
Рис. 1. Блок-схема I / Q-смесителя и график частотной области подавления изображения.
Смесители с отклонением изображения I / Q (IRM)
I / Q-смеситель — это тип пассивного смесителя. Он предлагает те же преимущества, что и обычные пассивные микшеры, плюс дополнительное преимущество в виде устранения нежелательных сигналов изображения без какой-либо внешней фильтрации.Эти микшеры также называются IRM (микшеры с подавлением изображения) при использовании в качестве понижающего преобразователя и SSB (микшер с одной боковой полосой) при использовании в качестве повышающего преобразователя. Смеситель I / Q состоит из двух двойных балансных смесителей и сигнала гетеродина, который разделяется на два, а затем сдвигается по фазе на 90 ° (0 ° для одного смесителя и 90 ° для второго смесителя). Этот сдвиг по фазе позволяет смесителю генерировать только один (полезный) сигнал боковой полосы и отклонять нежелательный сигнал.
Спектральная диаграмма на рисунке 2 показывает характеристики смесителя I / Q (фиолетовая линия) и двойного балансного смесителя (синяя линия) на той же диаграмме.Как можно видеть, I / Q-смеситель отклоняет нежелательную нижнюю боковую полосу, предлагая подавление 45 дБ, по сравнению с двойным балансным смесителем, который создает как верхнюю, так и нижнюю боковую полосу.
Рис. 2. График спектра пассивного смесителя HMC773A в сравнении с I / Q-смесителями HMC8191 на входе ПЧ 1 ГГц и входе гетеродина 16 ГГц.
Как и пассивные смесители с двойной балансировкой, смесители I / Q также требуют большой входной мощности гетеродина. Архитектурно, поскольку в I / Q-смесителях используются два двойных балансных смесителя, они, как правило, требуют дополнительного возбуждения гетеродина ~ 3 дБ по сравнению сдва смесителя с двойной балансировкой. Смесители I / Q чувствительны к хорошо сбалансированному согласованию фазы и амплитуды входного сигнала. Любой фазовый сдвиг от 90 ° или дисбаланс амплитуды входного сигнала, гибридного, системной платы или самого микшера напрямую влияет на уровень подавления изображения. Влияние этих ошибок можно исправить извне путем калибровки микшера для повышения производительности.
Из-за характеристик подавления боковой полосы I / Q-смесители обычно используются в приложениях, где необходимо удалить боковую полосу без внешней фильтрации, обеспечивая при этом очень хорошие NF и линейность.Транзитная микроволновая связь «точка-точка», контрольно-измерительные приборы и конечное использование в военных целях являются типичными примерами таких рынков.
Преимущества I / Q-смесителей
- Отклонение собственного изображения
- Устраняет необходимость в дорогостоящей фильтрации
- Хорошее согласование амплитуды и фазы
Активные смесители
Другой распространенный микшер — активный микшер. Существует два основных типа активных смесителей: одинарный балансный и дважды балансный (также называемый ячейкой Гилберта).Активные смесители имеют преимущество внутреннего блока усиления на порте гетеродина, а также на выходе RF. Эти смесители обеспечивают некоторое усиление преобразования выходного сигнала, а также выигрывают от более низкого требования к входной мощности гетеродина. Типичная входная мощность гетеродина в активном смесителе составляет около 0 дБмВт, что намного ниже, чем у большинства пассивных смесителей.
Часто активные смесители также включают встроенный умножитель гетеродина для умножения частоты гетеродина на более высокую частоту. Этот умножитель дает клиентам большое преимущество, поскольку устраняет необходимость в высокой частоте гетеродина для управления смесителем.Активные микшеры обычно имеют хорошую изоляцию между портами. Однако они страдают от более высокого NF и, в большинстве случаев, от более низкой линейности. Потребность во входной мощности постоянного тока влияет на коэффициент шума и линейность активного смесителя. Активные смесители обычно используются на рынках связи и военного назначения, где могут быть важны низкий уровень сигнала гетеродина и необходимость интегрированного усиления преобразования. На рынках испытаний и измерений активные смесители в основном используются в качестве смесителей третьей или последней ступени в подсекции IF или для приборов низкого уровня, где интегрированная и экономичная конструкция более важна, чем лучший в своем классе NF.
Преимущества активных смесителей
- Небольшой размер благодаря высокой интеграции
- Низкие требования к приводу LO
- Интегрированный умножитель гетеродина
- Хорошая изоляция, но страдает линейностью и шумом
Смесители со встроенным преобразователем частоты
Поскольку клиенты ожидают более полных решений для сигнальных цепей, стала популярной еще одна категория смесителей — встроенные преобразователи частоты. Эти устройства состоят из различных функциональных блоков, соединенных вместе, чтобы создать подсистему, которая упрощает проектирование конечной системы заказчика.Эти устройства объединяют в одном корпусе или микросхеме различные блоки, такие как смесители, схемы ФАПЧ, ГУН (генераторы управления напряжением), умножители, блоки усиления, детекторы и многое другое. Эти устройства могут быть построены как SIP (система в пакете), которая собирает несколько кристаллов в одном корпусе или на одном кристалле, который включает все конструктивные блоки.
Интегрируя несколько компонентов в один чип или корпус, преобразователи частоты предлагают конструкторам значительные преимущества, такие как уменьшенный размер, меньшее количество деталей, более простую конструктивную архитектуру и, что наиболее важно, более быстрое время выхода на рынок.
Рис. 3. Блок-схема смесителя со встроенным преобразователем частоты HMC6147A.
Приложения для смесителей по рынкам
Теперь, когда мы понимаем различные типы обычно используемых типов смесителей и их плюсы и минусы, мы можем обсудить их применение на разных рынках.
Рынок базовых станций и ретрансляторов сотовой связи
Для рынка сотовых базовых станций и ретрансляторов стоимость и интеграция являются главными факторами. В связи с быстрым ростом сетей 3G, LTE и TDD-LTE во всем мире операторам связи необходимо разрабатывать аппаратные платформы RF, которые они могут повторно использовать на нескольких географических рынках, используя разные частотные каналы.Потребности каждого географического рынка различны в техническом и финансовом отношении. В результате микшеры для базовых станций сотовой связи должны иметь возможность охватывать несколько диапазонов сотовой связи, соответствовать низкой цене для массового развертывания и предлагать более высокую степень интеграции для быстрой разработки и низкой стоимости. Поэтому на этом рынке обычно используются широкополосные, активные и высокоинтегрированные смесители (преобразователи частоты).
Analog Devices Bi CMOS-смесители на основе SiGe со встроенными усилителями гетеродина и промежуточной частоты, а также интегрированной системой ФАПЧ / ГУН обычно используются поставщиками базовых станций уровня 1, уровня 2 и сотовой связи.ADRF6655 (широкополосный смеситель от 0,1 ГГц до 2,5 ГГц со встроенной ФАПЧ / ГУН), AD8342 (широкополосный активный смеситель от НЧ до 3 ГГц) и ADL5811 (смеситель от 0,7 ГГц до 2,8 ГГц с ПЧ и широкополосным усилителем гетеродина) являются обычно используемыми смесителями. для конструкций базовых станций и приемников сотовой связи. Используя сочетание активных и пассивных смесителей, эти смесители объединяют несколько радиочастотных компонентов по низкой цене, обеспечивая при этом широкополосную производительность.
Транзитное соединение для микроволновой связи точка-точка (инфраструктура связи)
Производители инфраструктурных коммуникаций (проводных и беспроводных) переходят к более интегрированным решениям, но при этом основное внимание уделяется высокой производительности для поддержки максимальной модуляции пропускной способности данных.В связи с необходимостью поддержки увеличенного объема данных радиостанции обратного рейса должны иметь очень высокие требования к производительности. Десять или два назад большинство OEM-производителей (производителей оригинального оборудования) использовали сбалансированные микшеры и гетеродинную архитектуру, а универсальный микшер хорошо работал с множеством двухточечных радиосистем. Затем производители оборудования начали использовать смесители I / Q (или IRM) для повышения производительности и сокращения схем фильтрации. Как мы видели выше, смеситель I / Q по своей сути удаляет частоту изображения, тем самым устраняя необходимость в дорогостоящей фильтрации нежелательных боковых полос.Analog Devices предлагает широкий выбор I / Q-смесителей, охватывающих все коммерческие микроволновые диапазоны частот. Эти микшеры значительно упрощают конструкцию базовой станции и значительно улучшают производительность, которая поддерживает более высокие QAM.
Но теперь, с растущей потребностью в сокращении времени выхода на рынок и дальнейшем улучшении требований к производительности транзитного соединения точка-точка, OEM-производители начали применять более интегрированные I / Q преобразователи с повышением и понижением частоты. Типичный преобразователь с повышением частоты от Analog Devices (например, HMC7911LP5E и HMC7912LP5E) объединяет в одном корпусе I / Q-смеситель, активный умножитель × 2 и усилитель-драйвер на выходе RF.Таким образом, вместо того, чтобы выбирать несколько совпадающих компонентов и оптимизировать производительность для каждого из них, разработчики теперь могут выбрать один преобразователь с повышением частоты и сосредоточить больше времени на оптимизации общей производительности сигнальной цепи.
Аналогично, I / Q-преобразователь с понижением частоты от Analog Devices (например, HMC1113LP5E, HMC977LP4E и HMC6147ALC5A) объединяет в одном корпусе I / Q-смеситель, LNA, активный умножитель × 2 и усилитель гетеродина. С подавлением изображения до 40 дБн в диапазоне и минимальным уровнем шума всего 2.Понижающие преобразователи ADI на 5 дБ обеспечивают лучшие в отрасли характеристики для всех коммерческих микроволновых транзитных приемников. Analog Devices — единственная компания в отрасли, которая предлагает полный портфель повышающих и понижающих преобразователей для каждого коммерческого микроволнового диапазона от 6 ГГц до 42 ГГц.
Конкуренция за производительность и интеграцию на рынке радиорелейных сетей очень высока. Несколько лет назад большинство OEM-производителей сосредоточились на определенных конкретных диапазонах частот и ориентировали свои решения только на эти диапазоны.Сегодня, когда требуется глобальный рост беспроводной связи и доступность нового спектра во всем мире, большинство OEM-производителей планируют разработать радиостанции для всех коммерческих микроволновых радиодиапазонов от 6 ГГц до 42 ГГц. В результате конструкции базовой станции больше не полагаются на дискретные или частично интегрированные компоненты. Новые конструкции требуют платформенного подхода, позволяющего использовать общие компоненты в нескольких частотных диапазонах.
В результате большинство OEM-производителей теперь ожидают, что одна общая платформа микширования частот сможет покрыть несколько радиодиапазонов и получить максимальную производительность и экономию на масштабе.Ведущий в отрасли ADRF6780 от Analog Devices (I / Q-модулятор от 6 ГГц до 24 ГГц) является шагом в этом направлении. Используя один I / Q-модулятор или I / Q-демодулятор, OEM-производители теперь могут проектировать микроволновые ретрансляционные радиостанции для девяти различных радиодиапазонов от 6 ГГц до 24 ГГц . Как показано на рисунке 4, ADRF6780 объединяет в одном корпусе I / Q-смеситель, выбираемый множитель гетеродина, VVA, лог-детектор и программируемый с помощью SPI буфер четырехкратного разделения. Это устройство предлагает OEM-производителям возможность использовать этот микшер в традиционных гетеродинных архитектурах с IF = 0.От 8 ГГц до 3,5 ГГц и исключение отдельных компонентов или при прямом преобразовании (архитектура с нулевой ПЧ), которое идет от ВЧ до основной полосы с помощью всего одной части. Встроенный удвоитель гетеродина и буфер снижает потребность в высокой входной частоте и мощности. Эта часть также включает в себя регулировку усиления VVA для обеспечения постоянного усиления на выходе при необходимости. Все функции в этой части, связанные с настройками усиления, отклонением изображения, калибровкой и т. Д., Могут управляться шиной SPI, что упрощает использование дизайнерами в своих проектах.
Рис. 4. Блок-схема широкополосного микроволнового преобразователя с повышением частоты ADRF6780.
На Рисунке 5 показано откалиброванное подавление боковой полосы на ADRF6780 и подчеркивается, что даже с широкополосной производительностью это новое поколение устройств обеспечивает самые современные характеристики РЧ.
Рисунок 5. Подавление боковой полосы ADRF6780 и обнуление сквозного канала несущей.
Новый преобразователь переопределяет подход разработчиков к проектированию сигнальных цепей для базовых микроволновых станций. С помощью этого преобразователя разработчики ВЧ-сигналов теперь могут тратить больше времени на оптимизацию характеристик сигнальной цепи путем обновления программного обеспечения по сравнению с традиционным подходом согласования каждого компонента только для достижения основных характеристик системы.
Контрольно-измерительные приборы и военное дело
На рынках контрольно-измерительной аппаратуры и военного оборудования всегда была явная потребность в широкополосных характеристиках. Большинство приложений на этих рынках, таких как радиоэлектронное противодействие, радары и анализаторы спектра, имеют широкие возможности настройки и требуют исключительно высокой целостности и точности сигнала. Эти приложения обычно также охватывают широкий спектр частотных диапазонов (требование широкополосной связи) и нуждаются в способности обнаруживать сигналы с очень низкой точностью (низкий коэффициент шума и высокая линейность).Дункан Босуорт, директор по маркетингу ADI, опубликовал подробную статью «Многофункциональность: дилемма или реальность?» в июне 2015 года, в котором обсуждаются потребности военных заказчиков в широкополосной связи.
В связи с необходимостью широкополосной связи, гибкости конструкции и высокой производительности, T&M и военные компании предпочитают использовать дискретные смесители, которые можно индивидуально настроить и оптимизировать для достижения конкретных целей проектирования. Как описано выше, пассивные смесители обеспечивают лучшую линейность и лучший коэффициент шума, чем интегрированные или активные смесители.Между прочим, даже в пассивных смесителях широкополосные и оптимальные ВЧ характеристики (линейность, коэффициент шума, паразиты и т. Д.) Подобны двум противоположным сторонам медали. Традиционно компании, производящие полупроводники, жертвовали широкополосной передачей радиочастотных характеристик или наоборот. В результате военные и конструкторы контрольно-измерительной аппаратуры будут использовать узкополосные компоненты параллельно для покрытия широких частотных диапазонов. Таким образом они смогли обеспечить наилучшую производительность в каждой узкой полосе. Такое решение работало, но делало конструкции чрезвычайно сложными, дорогими и трудными в обслуживании.
С улучшением технологий и процессов такие компании, как Analog Devices, упростили конструкции. Используя компоненты широкополосного микшера, контрольно-измерительные приборы и военные клиенты могут получить эквивалентную или лучшую производительность, чем узкополосные компоненты, а также охватить несколько полос частот одной частью. С 2009 года компания Analog Devices представляет самый широкий в отрасли портфель пассивных широкополосных смесителей — смесители с одиночным, двойным и тройным балансным диапазоном, смесители I / Q, смесители с высоким IP3 и субгармонические смесители.Разработчикам больше не нужно идти на компромисс с производительностью ради широкополосного дизайна. Чандра Гупта, директор по развитию бизнеса ADI, недавно опубликовала подробную статью под названием «Исследование широкополосных преобразователей частоты», в которой обсуждается, как компания Analog Devices упрощает контрольно-измерительные приборы и военные проекты с использованием широкополосных преобразователей частоты. На рисунке 6 показано, как широкополосные компоненты (включая широкополосные смесители) упрощают общую сигнальную цепь в контрольно-измерительных и военных приложениях.
Рисунок 6.Широкополосные компоненты упрощают общую сигнальную цепь в контрольно-измерительных приборах и военных приложениях.
Несмотря на то, что большинство других сегментов рынка начали двигаться в сторону интегрированных микшеров для снижения стоимости и упрощения конструкции, компоненты дискретного микширования, такие как HMC773ALC3B (двойной балансный микшер от 6 до 26 ГГц) и HMC1048LC3B (двойные симметричные микшеры от 2 до 18 ГГц) занимают видное место среди заказчиков T&M и военных. Для применения в высокоточных испытательных и измерительных приборах, таких как анализаторы спектра и анализаторы сигналов, а также для передовых приложений радаров и радиоэлектронной борьбы, I / Q-смесители начали набирать популярность.Эти микшеры устраняют необходимость во внешней фильтрации, но при этом обеспечивают хорошее подавление изображения.
В прошлом большинство I / Q-смесителей в отрасли были узкополосными. Но теперь, когда Analog Devices раздвигает границы инноваций в области ВЧ и СВЧ, отрасль теперь может ожидать два новых широкополосных I / Q-смесителя — HMC8191LC4 (I / Q-смеситель от 6 до 26 ГГц) и HMC8193LC4 (от 2,5 до 8,5 ГГц I / Q). Смеситель). С помощью этих двух микшеров T&M и военные заказчики могут заменить до восьми узкополосных I / Q-микшеров и при этом достичь тех же целей проектирования для своего приложения.Разработчикам больше не нужно отказываться от производительности в пользу широкополосного доступа.
Сегмент контрольно-измерительной аппаратуры и военный сегмент, вероятно, продолжат использовать решения с дискретным частотным микшированием в течение следующих нескольких лет. Однако, учитывая потребность в более портативных и менее энергопотребляющих приложениях, вскоре мы можем увидеть растущий спрос на повышенную интеграцию и снижение мощности. Пассивные смесители по умолчанию предлагают гораздо лучшую линейность, коэффициент шума и энергопотребление, но предлагают ограниченную гибкость интеграции.Точно так же активные микшеры предлагают высокую степень интеграции, но с компромиссом между мощностью и NF. Ожидаем еще
инноваций и передовых разработок в этом направлении. Возможно, однажды мы увидим частотные микшеры, которые объединят лучшее из обоих миров и предложат высокую линейность, широкополосную производительность, низкое энергопотребление и уменьшенный размер. Этот день не так уж и далек.
Сводка
Индустрия СВЧ продолжает удивлять инженерное сообщество своими достижениями в области технологий.Потребности компонентов для микроволнового перемешивания теперь стали более разнообразными и специфичными для рыночных приложений, чем когда-либо прежде. Вчерашние предложения по универсальным смесителям не будут работать для новых приложений в различных сегментах рынка. Производители оригинального оборудования смотрят на свои разработки более ориентированными на платформу и приложения. Производители полупроводников должны иметь возможность предоставлять решения для смешивания частот для каждого из этих сегментов рынка. Производителям оригинального оборудования необходимо начать тесное сотрудничество с пионерами полупроводниковой промышленности, такими как Analog Devices, для разработки решений для частотного смешивания, а не только для частотных компонентов.
| Технические характеристики | HMC8193 | HMC8191 | |||||
| мин. | Тип | Макс | мин. | Тип | Макс | шт. | |
| Диапазон RF и LO | 2,5 | 8.5 | 6 | 26,5 | ГГц | ||
| Диапазон IF | постоянного тока | 3,5 | постоянного тока | 5 | ГГц | ||
| Потери преобразования | 8 | 10 | 9 | 12 | дБ | ||
| Отклонение изображения | 23 | 32 | 20 | 25 | дБ | ||
| Вход IP3 | 17 | 21 | 15 | 20 | дБм | ||
| Изоляция от LO к RF | 37 | 45 | 40 | 45 | дБ | ||
| Изоляция от LO к IF | 30 | 40 | 35 | 40 | дБ | ||
