Что такое частотный преобразователь. Как устроен частотный преобразователь. Какие бывают типы частотных преобразователей. Как работает частотный преобразователь. Каковы преимущества использования частотных преобразователей. Где применяются частотные преобразователи.
Что такое частотный преобразователь и для чего он используется
Частотный преобразователь — это электронное устройство, предназначенное для преобразования переменного тока одной частоты в переменный ток другой частоты. Основная задача частотного преобразователя — управление скоростью и моментом электродвигателя путем изменения частоты и амплитуды питающего напряжения.
Частотные преобразователи позволяют:
- Плавно регулировать скорость вращения электродвигателя в широком диапазоне
- Оптимизировать режимы работы и повысить энергоэффективность электропривода
- Обеспечить плавный пуск и торможение двигателя
- Защитить двигатель от перегрузок
- Снизить пусковые токи и механические нагрузки на оборудование
Благодаря этим возможностям частотные преобразователи находят широкое применение в промышленности, на транспорте, в системах вентиляции, насосных станциях и многих других областях.
Основные типы частотных преобразователей
Существует два основных типа частотных преобразователей:
1. С явно выраженным звеном постоянного тока
Такие преобразователи имеют в своем составе выпрямитель, звено постоянного тока и инвертор. Они осуществляют двойное преобразование энергии:
- Переменный ток преобразуется в постоянный (выпрямляется)
- Постоянный ток преобразуется обратно в переменный нужной частоты
Это наиболее распространенный тип преобразователей частоты.
2. С непосредственной связью
В таких преобразователях выходное напряжение формируется из участков синусоид входного напряжения. Они не имеют промежуточного звена постоянного тока. Из-за ряда ограничений применяются реже.
Структурная схема и принцип работы частотного преобразователя
Рассмотрим структуру и принцип действия наиболее распространенного типа частотного преобразователя — с явно выраженным звеном постоянного тока.Типовая схема такого преобразователя включает следующие основные блоки:
- Выпрямитель
- Фильтр звена постоянного тока
- Инвертор
- Система управления
Принцип работы частотного преобразователя:
- Входное переменное напряжение преобразуется выпрямителем в постоянное
- Постоянное напряжение сглаживается фильтром
- Инвертор преобразует постоянное напряжение в переменное нужной частоты и амплитуды
- Система управления формирует сигналы для управления инвертором
За счет широтно-импульсной модуляции (ШИМ) на выходе инвертора формируется переменное напряжение заданной частоты и амплитуды, которое подается на электродвигатель.
Силовая часть частотного преобразователя
Выпрямитель
Выпрямитель преобразует входное переменное напряжение в постоянное. Может быть управляемым или неуправляемым. Чаще всего используются диодные или тиристорные мосты.
Звено постоянного тока
Состоит из фильтра, который сглаживает пульсации выпрямленного напряжения. Обычно это LC-фильтр, содержащий дроссель и конденсатор.
Инвертор
Ключевой элемент преобразователя. Преобразует постоянное напряжение в переменное нужной частоты. В современных преобразователях строится на IGBT-транзисторах.

Наиболее распространенные типы инверторов:
- Двухуровневый инвертор напряжения
- Трехуровневый инвертор с фиксированной нейтральной точкой
- Многоуровневые инверторы (каскадные, с плавающими конденсаторами)
Система управления частотного преобразователя
Система управления — «мозг» преобразователя частоты. Она выполняет следующие основные функции:
- Формирование сигналов управления силовыми ключами инвертора
- Реализация алгоритмов управления двигателем
- Обработка сигналов обратной связи
- Защита преобразователя и двигателя
- Обмен данными с внешними устройствами
Современные системы управления строятся на базе микроконтроллеров или цифровых сигнальных процессоров (DSP). Это позволяет реализовать сложные алгоритмы управления, такие как:
- Скалярное управление
- Векторное управление
- Прямое управление моментом
Преимущества использования частотных преобразователей
Применение частотных преобразователей дает ряд важных преимуществ:
- Экономия электроэнергии (до 30-60%) за счет оптимизации режимов работы электропривода
- Плавное регулирование скорости в широком диапазоне
- Снижение пусковых токов и механических нагрузок на оборудование
- Повышение точности управления технологическими процессами
- Увеличение срока службы электродвигателей и механизмов
- Снижение шума и вибраций оборудования
- Возможность удаленного управления и диагностики
Области применения частотных преобразователей
Частотные преобразователи широко применяются в различных отраслях промышленности и хозяйства:

- Насосное и вентиляционное оборудование
- Конвейеры и транспортеры
- Лифтовое оборудование
- Станки и промышленные роботы
- Экструдеры и мешалки
- Компрессоры
- Электротранспорт
- Системы водоснабжения и отопления
Применение частотных преобразователей позволяет значительно повысить эффективность и надежность работы оборудования в этих и многих других областях.
Перспективы развития частотных преобразователей
Основные направления развития частотных преобразователей:
- Повышение энергоэффективности
- Увеличение мощности и рабочего напряжения
- Совершенствование алгоритмов управления
- Улучшение массогабаритных показателей
- Интеграция с системами управления верхнего уровня
- Применение новых полупроводниковых технологий (SiC, GaN)
Развитие частотных преобразователей идет в направлении создания более интеллектуальных, компактных и энергоэффективных устройств, способных решать все более сложные задачи управления электроприводом.
Частотные преобразователи — структура, принцип работы
Внимание! Приведенная ниже информация носит теоретический характер. Если Вам необходимо решить конкретную задачу или разобраться как и какое оборудование следует применить в Вашем случае, воспользуйтесь бесплатной консультацией связавшись с нами одним из указанных вверху данной страницы или на странице «Контакты» способов, либо заполните опросный лист. Инженер службы технической поддержки направит Вам рекомендации на указанный Вами адрес электронной почты.
Выходная частота в современных преобразователях может изменяться в широком диапазоне и быть как выше, так и ниже частоты питающей сети.
Схема любого преобразователя частоты состоит из силовой и управляющей частей. Силовая часть обычно выполнена на тиристорах или транзисторах, которые работают в режиме электронных ключей. Управляющая часть выполняется на цифровых микропроцессорах и обеспечивает управление силовыми электронными ключами, а также решение большого количества вспомогательных задач (контроль, диагностика, защита).
Частотные преобразователи, применяемые в регулируемом электроприводе, в зависимости от структуры и принципа работы силовой части разделяются на два класса:
- С явно выраженным промежуточным звеном постоянного тока.
- С с непосредственной связью (без промежуточного звена постоянного тока).
- Практически самый высокий КПД относительно других преобразователей (98,5% и выше).
- Способность работать с большими напряжениями и токами, что делает возможным их использование в мощных высоковольтных приводах, относительная дешевизна, несмотря на увеличение абсолютной стоимости за счет схем управления и дополнительного оборудования.
Каждый из существующих классов имеет свои достоинства и недостатки, которые определяют область рационального применения каждого из них.
Исторически первыми появились преобразователи с непосредственной связью (рис. 4.), в которых силовая часть представляет собой управляемый выпрямитель и выполнена на не запираемых тиристорах. Система управления поочередно отпирает группы тиристоров и подключает статорные обмотки двигателя к питающей сети.
Таким образом, выходное напряжение преобразователя формируется из «вырезанных» участков синусоид входного напряжения. На рис.5. показан пример формирования выходного напряжения для одной из фаз нагрузки. На входе выигрывают у тиристорных действует трехфазное синусоидальное напряжение uа, uв, uс. Выходное напряжение uвых имеет несинусоидальную «пилообразную» форму, которую условно можно аппроксимировать синусоидой (утолщенная линия). Из рисунка видно, что частота выходного напряжения не может быть равна или выше частоты питающей сети. Она находится в диапазоне от 0 до 30 Гц. Как следствие малый диапазон управления частоты вращения двигателя (не более 1: 10). Это ограничение не позволяет применять такие преобразователи в современных частотно регулируемых приводах с широким диапазоном регулирования технологических параметров.
Использование не запираемых тиристоров требует относительно сложных систем управления, которые увеличивают стоимость преобразователя.
«Резаная» синусоида на выходе преобразователя является источником высших гармоник, которые вызывают дополнительные потери в электрическом двигателе, перегрев электрической машины, снижение момента, очень сильные помехи в питающей сети. Применение компенсирующих устройств приводит к повышению стоимости, массы, габаритов, понижению к.п.д. системы в целом.
Наряду с перечисленными недостатками преобразователей с непосредственной связью, они имеют определенные достоинства. К ним относятся:
Подобные схемы преобразователей используются в старых приводах и новые конструкции их практически не разрабатываются.
Наиболее широкое применение в современных частотно регулируемых приводах находят частотники с явно выраженным звеном постоянного тока (рис. 6.)
В частотных преобразователях этого класса используется двойное преобразование электрической энергии: входное синусоидальное напряжение с постоянной амплитудой и частотой выпрямляется в выпрямителе (В), фильтруется фильтром (Ф), сглаживается, а затем вновь преобразуется инвертором (И) в переменное напряжение изменяемой частоты и амплитуды. Двойное преобразование энергии приводит к снижению к.п.д. и к некоторому ухудшению массогабаритных показателей по отношению к преобразователям с непосредственной связью.
Для формирования синусоидального переменного напряжения используются автономные инверторы напряжения и автономные инверторы тока.
В качестве электронных ключей в инверторах применяются запираемые тиристоры GTO и их усовершенствованные модификации GCT, IGCT, SGCT, и биполярные транзисторы с изолированным затвором IGBT.
Главным достоинством тиристорных преобразователей частоты, как и в схеме с непосредственной связью, является способность работать с большими токами и напряжениями, выдерживая при этом продолжительную нагрузку и импульсные воздействия.
Они имеют более высокий КПД (до 98%) по отношению к преобразователям на IGBT транзисторах (95 – 98%).
Преобразователи частоты на тиристорах в настоящее время занимают доминирующее положение в высоковольтном приводе в диапазоне мощностей от сотен киловатт и до десятков мегаватт с выходным напряжением 3 — 10 кВ и выше. Однако их цена на один кВт выходной мощности самая большая в классе высоковольтных преобразователей.
До недавнего прошлого преобразователи частоты на GTO составляли основную долю и в низковольтном частотно регулируемом приводе. Но с появлением IGBT транзисторов произошел «естественный отбор» и сегодня преобразователи на их базе общепризнанные лидеры в области низковольтного частотно регулируемого привода.
Тиристор является полууправляемым приборам: для его включения достаточно подать короткий импульс на управляющий вывод, но для выключения необходимо либо приложить к нему обратное напряжение, либо снизить коммутируемый ток до нуля. Для этого в тиристорном преобразователе частоты требуется сложная и громоздкая система управления.
Биполярные транзисторы с изолированным затвором IGBT отличают от тиристоров полная управляемость, простая не энергоемкая система управления, самая высокая рабочая частота.
Вследствие этого преобразователи частоты на IGBT позволяют расширить диапазон управления скорости вращения двигателя, повысить быстродействие привода в целом.
Для асинхронного электропривода с векторным управлением преобразователи на IGBT позволяют работать на низких скоростях без датчика обратной связи.
Применение IGBT с более высокой частотой переключения в совокупности с микропроцессорной системой управления в частотных преобразователях снижает уровень высших гармоник, характерных для тиристорных преобразователей. Как следствие меньшие добавочные потери в обмотках и магнитопроводе электродвигателя, уменьшение нагрева электрической машины, снижение пульсаций момента и исключение так называемого «шагания» ротора в области малых частот. Снижаются потери в трансформаторах, конденсаторных батареях, увеличивается их срок службы и изоляции проводов, уменьшаются количество ложных срабатываний устройств защиты и погрешности индукционных измерительных приборов.
Частотные преобразователи на транзисторах IGBT по сравнению с тиристорными преобразователями при одинаковой выходной мощности отличаются меньшими габаритами, массой, повышенной надежностью в силу модульного исполнения электронных ключей, лучшего теплоотвода с поверхности модуля и меньшего количества конструктивных элементов.
Они позволяют реализовать более полную защиту от бросков тока и от перенапряжения, что существенно снижает вероятность отказов и повреждений электропривода.
На настоящий момент низковольтные преобразователи на IGBT имеют более высокую цену на единицу выходной мощности, вследствие относительной сложности производства транзисторных модулей. Однако по соотношению цена/качество, исходя из перечисленных достоинств, они явно выигрывают у тиристорных, кроме того, на протяжении последних лет наблюдается неуклонное снижение цен на IGBT модули.
Главным препятствием на пути их использования в высоковольтном приводе с прямым преобразованием частоты и при мощностях выше 1 – 2 МВт на настоящий момент являются технологические ограничения. Увеличение коммутируемого напряжения и рабочего тока приводит к увеличению размеров транзисторного модуля, а также требует более эффективного отвода тепла от кремниевого кристалла.
Новые технологии производства биполярных транзисторов направлены на преодоление этих ограничений, и перспективность применения IGBT очень высока также и в высоковольтном приводе. В настоящее время IGBT транзисторы применяются в высоковольтных преобразователях в виде последовательно соединенных нескольких единичных модулей.
Структура и принцип работы низковольтного преобразователя частоты на IGBT транзисторах
Типовая схема низковольтного преобразователя частоты представлена на рис. 7. В нижней части рисунка изображены графики напряжений и токов на выходе каждого элемента инвертора.
Переменное напряжение питающей сети (uвх.)с постоянной амплитудой и частотой (U вх = const, f вх = const) поступает на управляемый или неуправляемый выпрямитель (1).
Для сглаживания пульсаций выпрямленного напряжения (uвыпр.) используется фильтр (2). Выпрямитель и емкостный фильтр (2) образуют звено постоянного тока.
С выхода фильтра постоянное напряжение u d поступает на вход автономного импульсного инвертора (3).
Автономный инвертор современных низковольтных преобразователей, как было отмечено, выполняется на основе силовых биполярных транзисторов с изолированным затвором IGBT. На рассматриваемом рисунке изображена схема преобразователя частоты с автономным инвертором напряжения как получившая наибольшее распространение.
В инверторе осуществляется преобразование постоянного напряжения ud в трехфазное (или однофазное) импульсное напряжение u и изменяемой амплитуды и частоты. По сигналам системы управления каждая обмотка электрического двигателя подсоединяется через соответствующие силовые транзисторы инвертора к положительному и отрицательному полюсам звена постоянного тока. Длительность подключения каждой обмотки в пределах периода следования импульсов модулируется по синусоидальному закону. Наибольшая ширина импульсов обеспечивается в середине полупериода, а к началу и концу полупериода уменьшается. Таким образом, система управления обеспечивает широтно-импульсную модуляцию (ШИМ) напряжения, прикладываемого к обмоткам двигателя.Амплитуда и частота напряжения определяются параметрами модулирующей синусоидальной функции.
При высокой несущей частоте ШИМ (2 … 15 кГц) обмотки двигателя вследствие их высокой индуктивности работают как фильтр. Поэтому в них протекают практически синусоидальные токи.
В схемах преобразователей с управляемым выпрямителем (1) изменение амплитуды напряжения uи может достигаться регулированием величины постоянного напряжения ud, а изменение частоты – режимом работы инвертора.
При необходимости на выходе автономного инвертора устанавливается фильтр (4) для сглаживания пульсаций тока. (В схемах преобразователей на IGBT в силу низкого уровня высших гармоник в выходном напряжении потребность в фильтре практически отсутствует.)
Таким образом, на выходе преобразователя частоты формируется трехфазное (или однофазное) переменное напряжение изменяемой частоты и амплитуды (вых = var, f вых = var).
Сделать заказ на частотный преобразователь
Частотный преобразователь
Дмитрий Левкин
Частотный преобразователь, или преобразователь частоты — электротехническое устройство (система управления), используемое для контроля скорости и/или момента двигателей переменного тока путем изменения частоты и напряжения питания электродвигателя.Согласно ГОСТ 23414-84 полупроводниковый преобразователь частоты — полупроводниковый преобразователь переменного тока, осуществляющий преобразование переменного тока одной частоты в переменный ток другой частоты
Частотный преобразователь — это устройство, используемое для того чтобы обеспечить непрерывное управление процессом. Обычно частотный преобразователь способен управлять скоростью и моментом асинхронных и/или синхронных двигателей.
Частотный преобразователь небольшой мощности
Высоковольтный преобразователь
Преобразователи частоты находят все более широкое применение в различных приложениях промышленности и транспорта. Благодаря развитию силовых полупроводниковых элементов, инверторы напряжения и инверторы тока с ШИМ управлением получают все более широкое распространение. Устройства, которые преобразуют постоянный сигнал в переменный, с желаемым напряжением и частотой, называются инверторами. Такое преобразование может быть осуществлено с помощью электронных ключей (BJT, MOSFET, IGBT, MCT, SIT, GTO) и тиристоров в зависимости от задачи.
На данный момент основная часть всей производимой электрической энергии в мире используется для работы электрических двигателей. Преобразование электрической мощности в механическую мощность осуществляется с помощью электродвигателей мощностью от меньше ватта до нескольких десятков мегаватт.
- Современные электроприводы должны отвечать различным требованиям таким как:
- максимальный КПД;
- широкий диапазон плавной установки скорости вращения, момента, ускорения, угла и линейного положения;
- быстрое удаление ошибок при изменении управляющих сигналов и/или помех;
- максимальное использование мощности двигателя во время сниженного напряжения или тока;
- надежность, интуитивное управление.
Основными элементами частотного преобразователя являются силовая часть (преобразователь электрической энергии) и управляющее устройство (контроллер). Современные частотные преобразователи обычно имеют модульную архитектуру, что позволяет расширять возможности устройства. Также зачастую имеется возможность установки дополнительных интерфейсных модулей и модулей расширения каналов ввода/вывода.
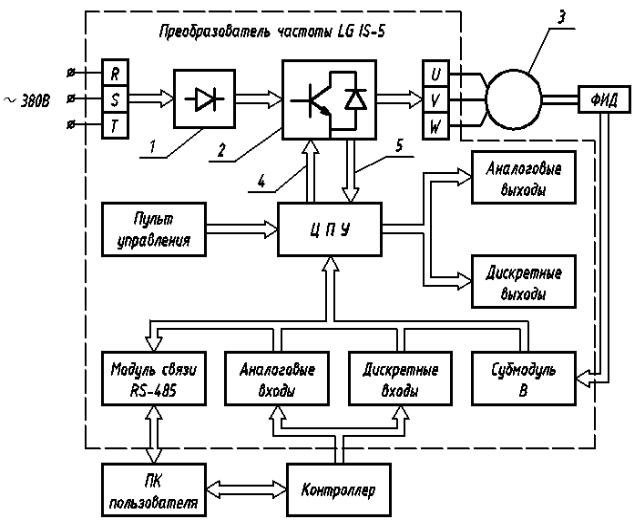
Функциональная схема частотного преобразователя
На микроконтроллере частотного преобразователя выполняется программное обеспечение, которое управляет основными параметрами электродвигателя (скоростью и моментом). Основные методы управления бесщеточными двигателями, используемые в частотных преобразователях представлены в таблице ниже.
Характеристики основных способов управления электродвигателями используемых в частотных преобразователях [3]Примечание:
- Без обратной связи.
- С обратной связью.
- В установившемся режиме
Широкое развитие силовых электрических преобразователей в последние десятилетия привело к увеличению количества исследований в области модуляции. Метод модуляции непосредственно влияет на эффективность всей энергосистемы (силовой части, системы управления), определяя экономическую выгоду и производительность конечного продукта.
Главная цель методов модуляции – добиться лучшей формы сигналов (напряжений и токов) с минимальными потерями. Другие второстепенные задачи управления могут быть решены посредством использования правильного способа модуляции, такие как уменьшение синфазной помехи, выравнивание постоянного напряжения, уменьшение пульсаций входного тока, снижение скорости нарастания напряжения. Одновременное достижение всех целей управления невозможно, необходим компромисс. Каждая схема силового преобразователя и каждое приложение должны быть глубоко изучены для определения наиболее подходящего метода модуляции.
- Методы модуляции можно разделить на четыре основные группы:
- ШИМ — широтно-импульсная модуляция
- ПВМ — пространственно-векторная модуляция
- гармоническая модуляция
- методы переключения переменной частоты
Корни силовой электроники уходят к 1901 году, когда П.К. Хьюитт изобрел ртутный вентиль. Однако современная эра полупроводниковой силовой электроники началась с коммерческого представления управляемого кремниевого выпрямителя (тиристора) компанией General Electric в 1958 году. Затем развитие продолжалось в области новых полупроводниковых структур, материалов и в производстве, давая рынку много новых устройств с более высокой мощностью и улучшенными характеристиками. Сегодня силовая электроника строится на металл-оксид-полупроводниковых полевых транзисторах (MOSFET — metal-oxide-semiconductor field-effect transistor) и биполярных транзисторах с изолированным затвором (IGBT — Insulated-gate bipolar transistors), а для диапазона очень высоких мощностей — на тиристорах с интегрированным управлением (IGCT – Integrated gate-commutated thyristor). Также сейчас доступны интегрированные силовые модули. Новая эра высоковольтных, высокочастотных и высокотемпературных технологий открывается многообещающими полупроводниковыми устройствами, основанными на широкой запрещенной зоне карбида кремния (SiC). Новые силовые полупроводниковые устройства всегда инициируют развитие новых топологий преобразователей [3].
Инвертор напряжения
Инвертор напряжения наиболее распространен среди силовых преобразователей.
Двухуровневый инвертор напряжения
Двухуровневый инвертор напряжения (two-level voltage-source inverter) – наиболее широко применяемая топология преобразователя энергии. Он состоит из конденсатора и двух силовых полупроводниковых ключей на фазу. Управляющий сигнал для верхнего и нижнего силовых ключей связан и генерирует только два возможных состояния выходного напряжения (нагрузка соединяется с положительной или отрицательной шиной источника постоянного напряжения).
Схема двухуровневого инвертора напряжения
Фазное напряжение двухуровневого инвертора напряжения
Используя методы модуляции для генерирования управляющих импульсов возможно синтезировать выходное напряжение с желаемыми параметрами (формой, частотой, амплитудой). Из-за содержания высоких гармоник в выходном сигнале для генерирования синусоидальных токов выходной сигнал необходимо фильтровать, но так как данные преобразователи обычно имеют индуктивную нагрузку (электродвигатели) дополнительные фильтры используются только при необходимости.
Максимальное выходное напряжение определяется значением постоянного напряжения звена постоянного тока. Для эффективного управления мощной нагрузкой требуется высокое постоянное напряжение звена постоянного тока, но на практике это напряжение ограничено максимальным рабочим напряжением полупроводников. Для примера низковольтные IGBT транзисторы обеспечивают выходное напряжение до 690 В. Для того чтобы обойти данное ограничение по напряжению в последние десятилетия были разработаны схемы многоуровневых преобразователей. Данные преобразователи сложнее, чем двухуровневые в плане топологии, модуляции и управления, но при этом имеют лучшие показатели по мощности, надежности, габаритам, производительности и эффективности.
Трехуровневый преобразователь с фиксированной нейтральной точкой
В трехуровневом преобразователе с фиксированной нейтральной точкой (three-level neutral point clamped converter) постоянное напряжение делится поровну посредством двух конденсаторов, поэтому фаза может быть подключена к линии положительного напряжения (посредством включения двух верхних ключей), к средней точке (посредством включения двух центральных ключей) или к линии отрицательного напряжения (посредством включения двух нижних ключей). Каждому ключу в данном случае требуется блокировать только половину напряжения звена постоянного тока, тем самым позволяя увеличить мощность устройства, используя те же самые полупроводниковые ключи, как и в обычном двухуровневом преобразователе. В данном преобразователе обычно используются высоковольтные IGBT транзисторы и IGCT тиристоры.
Схема трехуровневого преобразователя с фиксированной нейтральной точкой
- Недостатками данных преобразователей являются:
- Дисбаланс конденсаторов, создающий асимметрию в преобразователе. Данную проблему предлагается решать путем изменения метода модуляции.
- Неравное распределение потерь из-за того, что потери на переключение внешних и центральных ключей отличаются в зависимости от режима работы. Данная проблема не может быть решена с использованием обычной схемы, поэтому была предложена измененная топология – активный преобразователь со связанной нейтральной точкой (active NPC). В этой схеме диоды заменены управляемыми ключами. Таким образом, выбирая соответствующую комбинацию ключей, возможно уменьшить и равномерно распределить потери.
- ГОСТ Р 50369-92 Электроприводы. Термины и определения.
- Rahul Dixit, Bindeshwar Singh, Nupur Mittal. Adjustable speeds drives: Review on different inverter topologies.- Sultanpur, India.:International Journal of Reviews in Computing, 2012.
- Marian P. Kazmierkowski, Leopoldo G. Franquelo, Jose Rodriguez, Marcelo A. Perez, Jose I. Leon, «High-Performance Motor Drives», IEEE Industrial Electronicsd, vol. 5, no. 3, pp. 6-26, Sep.2011.
Фазное напряжение трехуровневого преобразователя с фиксированной нейтральной точкой
Преобразователь с фиксированной нейтральной точкой может масштабироваться для достижения больше чем трех уровней выходного сигнала путем деления напряжения звена постоянного тока более чем на два значения посредством конденсаторов. Каждое из этих деленных напряжений может быть подключено к нагрузке с использованием расширенного набора ключей и ограничительных диодов. Вместе с увеличением мощности преимуществами многоуровневого преобразователя является лучшее качество электроэнергии, меньшее значение скорости нарастания напряжения (dv/dt) и связанных электромагнитных помех. Однако, когда преобразователь со связанной нейтральной точкой имеет более трех уровней, появляются другие проблемы. С точки зрения схемотехники в таком случае ограничительные диоды требуют более высокое максимальное рабочее напряжение чем основные ключи, что требует использования различных технологий или нескольких ограничительных диодов соединенных последовательно. В дополнение становится критическим неравномерное использование силовых элементов в схеме. В итоге из-за увеличения количества элементов снижается надежность. Приведенные недостатки ограничивают использование преобразователей с фиксированной нейтральной точкой с более чем тремя уровнями в промышленных приложениях.
Многоуровневые преобразователи
Каскадные преобразователи основанные на модульных силовых ячейках со схемой H-мост (cascaded H-bridge — CHB) и преобразователи с плавающими конденсаторами (flying capacitor converter) были предложены для обеспечения большего количества уровней выходного напряжения в сравнении с преобразователями с фиксированной нейтральной точкой.
Каскадный Н-мостовой преобразователь
Каскадный преобразователь — высоко модульный преобразователь, состоящий из нескольких однофазных инверторов, обычно называемыми силовыми ячейками, соединенными последовательно для формирования фазы. Каждая силовая ячейка выполнена на стандартных низковольтных компонентах, что обеспечивает их легкую и дешевую замену в случае выхода из строя.
Схема каскадного преобразователя
Основным преимуществом данного преобразователя является использование только низковольтных компонентов, при этом он дает возможность управлять мощной нагрузкой среднего диапазона напряжения. Несмотря на то что частота коммутации в каждой ячейке низкая, эквивалентная частота коммутации приложенная к нагрузке – высокая, что уменьшает потери на переключение ключей, дает низкую скорость нарастания напряжения (dv/dt) и помогает избежать резонансов.
Фазное напряжение каскадного преобразователя
Преобразователь с плавающими конденсаторами
Выходное напряжение преобразователя с плавающими конденсаторами получается путем прямого соединения выхода фазы с положительной, отрицательной шиной или подключением через конденсаторы. Количество уровней выходных напряжений зависит от количества навесных конденсаторов и отношения между различными напряжениями.
Схема преобразователя с плавающими конденсаторами
Этот преобразователь, как и в случае каскадного преобразователя, также имеет модульную топологию, где каждая ячейка состоит из конденсатора и двух связанных ключей. Однако, в отличие от каскадного преобразователя добавление дополнительных силовых ключей к конденсаторному преобразователю не увеличивает номинальную мощность преобразователя, а только уменьшает скорость нарастания напряжения (dv/dt), улучшая коэффициент гармоник выходного сигнала. Как и у каскадного преобразователя, модульность уменьшает стоимость замены элементов, облегчает поддержку и позволяет реализовать отказоустойчивую работу.
Фазное напряжение преобразователя с плавающими конденсаторами
Конденсаторный преобразователь требует только один источник постоянного тока для питания всех ячеек и фаз. Поэтому, можно обойтись без входного трансформатора, а количество ячеек может быть произвольно увеличено в зависимости от требуемой выходной мощности. Подобно преобразователю с фиксированной нейтральной точкой, этому преобразователю требуется специальный алгоритм управления для регулирования напряжения на конденсаторах.
Инвертор тока
Для работы инвертору тока всегда требуется управляемый выпрямитель, чтобы обеспечить постоянный ток в звене постоянного тока. В стандартной топологии обычно используются тиристорные выпрямители. Чтобы уменьшить помехи в нагрузке, в звене постоянного тока используется расщепленная индуктивность. Инвертор тока имеет схему силовых ключей наподобие инвертора напряжения, но в качестве силовых ключей используются тиристоры с интегрированным управлением (IGCT). Выходной ток имеет форму ШИМ и не может быть напрямую приложен к индуктивной нагрузке (электродвигателю), поэтому инвертор тока обязательно включает выходной емкостной фильтр, который сглаживает ток и выдает гладкое напряжение на нагрузку. Этот преобразователь может быть реализован для работы на средних напряжениях и более того он по природе имеет возможность рекуперации энергии.
Схема инвертора тока с выпрямителем
Прямые преобразователи
Прямые преобразователи передают энергию прямо от входа к выходу без использования элементов накопления энергии. Основным преимуществом таких преобразователей является меньшие габариты. Недостатком – необходимость более сложной схемы управления.
Циклоконвертер относится к категории прямых преобразователей. Данный преобразователь широко использовался в приложениях требующих высокую мощность. Этот конвертер состоит из двойных тиристорных преобразователей на фазу, который может генерировать изменяемое постоянное напряжение, контролируемое таким образом, чтобы следовать опорному синусоидальному сигналу. Вход каждого преобразователя питается от фозосмещающего трансформатора, где устраняются гармоники входного тока низкого порядка. Выходное напряжение является результатом комбинации сегментов входного напряжения в котором основная гармоника следует за опорным сигналом. По своей природе данный преобразователь хорошо подходит для управления низкочастотными мощными нагрузками.
Схема циклоконвертера
Матричный преобразователь в его прямой и непрямой версии также принадлежит к категории прямых преобразователей. Основной принцип работы прямого матричного преобразователя (direct matrix converter) — возможность соединения выходной фазы к любому из входных напряжений. Преобразователь состоит из девяти двунаправленных ключей, которые могут соединить любую входную фазу с любой выходной фазой, позволяя току течь в обоих направлениях. Для улучшения входного тока требуется индуктивно-емкостной фильтр второго порядка. Выход напрямую соединяется с индуктивной нагрузкой. Не все доступные комбинации ключей возможны, они ограничены только 27 правильными состояниями коммутации. Как говорилось ранее, основное преимущество матричных преобразователей — меньшие габариты, что важно для автомобильных и авиационных приложений.
Схема прямого матричного преобразователя
Непрямой матричный преобразователь (indirect matrix converter) состоит из двунаправленного трехфазного выпрямителя, виртуального звена постоянного тока и трехфазного инвертора. Количество силовых полупроводников такое же как у прямых матричных преобразователей (если двунаправленный ключ рассматривается как два однонаправленных ключа), но количество возможных состояний включения отличается. Используя ту же самую конфигурацию непрямого матричного преобразователя, возможно упростить его топологию и уменьшить количество элементов ограничив его работу от положительного напряжения в виртуальном звене постоянного тока. Уменьшенная топология называется разреженный матричный преобразователь (sparse matrix converter).
Схема непрямого матричного преобразователя
Схема разреженного матричного преобразователя
Библиографический список
Схема частотного преобразователя. Описание структуры преобразователей частоты для асинхронных электродвигателей.
Об асинхронных двигателях переменного тока, работой которых управляют частотные преобразователи, часто говорят, как о лучшей альтернативе электрическим приводам постоянного тока. Хотя система, регулирующая скорость, с которой вращается электродвигатель, в последних не отличается сложностью, высокая стоимость и не очень высокая надежность делают их невыгодными. Есть и иные проблемы: щетки чрезмерно искрят, из-за чего повышена электроэрозия и изнашивается коллектор. Поэтому такие электродвигатели нельзя применять в сильно запыленных местах и там, где велика потенциальная опасность взрыва.
Схему преобразователя частоты придумали в далеких 1930-х годах. Однако внедрить ее в жизнь удалось только когда появились полупроводники и транзисторные элементы. Основным недостатком, свойственным асинхронным двигателям, является сложность организации системы, регулирующей скорость, с которой вращается двигатель. Вот почему понадобились частотники.
Конструктивные особенности преобразователей частоты
Схема частотного преобразователя асинхронного двигателя имеет следующую ключевую задачу: изменить характеристики, которые имеет проходящий через нее ток. Задача решается транзисторным выпрямлением электротока, который затем преобразовывается до требуемых определенных значений. Схема преобразователя частоты включает в себя три основных части. Она оснащена основанной на микропроцессорах управляющей системой, звеном постоянного тока, импульсным инвертором.
Задачи, которые выполняет первая из вышеперечисленных частей, следующие: управлять работой систем преобразования, защищать частотник. В составе второй части используются устройства фильтрации и выпрямитель. Ими осуществляются прием сигнала на входе и перенаправление того к инвертору. Ну а третьей частью (импульсным инвертором) производится преобразование тока таким образом, что тот приобретает определенную амплитуду и частоту. Затем преобразованный ток подается на статор. Обычно в конструкции используются 6 транзисторов-ключей либо построенная на тиристорах схема.
Схема частотного преобразователя способна обеспечить четкость синусоиды, которую имеет сигнал на выходе, если она собрана с использованием не устаревших тиристоров, а IGBT-транзисторов (они работают как инверторные ключи).
Принцип функционирования частотника
Вообще, полноценный частотник комплектуется следующими устройствами: системой управления, инвертором, управляющим широтно-импульсной модуляцией модулем, диодным силовым выпрямителем, конденсатором фильтра и дросселем. Это его основные структурные элементы. Регуляцию напряжения и частоты на выходе схема преобразователя осуществляет с помощью высокочастотного широтно-импульсного управления. Последнее же имеет зависимость от того, какая периодичность у модуляции.
Модуляцию определяют как отрезок времени, на протяжении которого статором получаются поочередные сигналы посылаемые то отрицательным, то положительным полюсом. Продолжительность данного отрезка модулируется в согласии с законом гармонических частот, который называют синусоидальным. А в обмотках электродвигателя ток подвергается дополнительному преобразованию, и после прохождения фильтра ему присуща четко синусоидальная форма. И, как уже было сказано выше, крайне желательно, чтобы схема частотного преобразователя подключаемого в асинхронные электродвигатели была собрана на IGBT-транзисторах.
Кривую, которую имеет выходное напряжение (а по сути она является ничем иным, как двуполярной последовательностью высокой частоты), создают импульсы, имеющие прямоугольную конфигурацию. Их тоже регулирует широтно-импульсная модуляция. Модулирование ширины, которую имеют импульсы, производится в соответствии с синусоидальным законом. Есть два способа, используя которые схема преобразователя частоты изменяет параметры напряжения на выходе.
Один из этих способов заключается в регуляции значения, которое имеет напряжение на входе, дающей результат в виде изменения амплитуды. Второй способ такой: значение, которое имеет напряжение на входе не изменяется, но делаются корректировки в программе, контролирующей, с какой периодичностью переключаются переключатели (6 транзисторных ключей). Производимые сегодня IGBT-транзисторы делают применение второго из вышеописанных способов более предпочтительным. Соответственно, он очень широко используется. Сегодня уже не так часто встречается схема частотного преобразователя, собранная не на IGBT-транзисторах. ШИМ, конечно, тоже способна выдавать кривую тока, по форме близкую к синусоиде. Однако только потому, что обмотки электродвигателя играют роль фильтра.
Что такое преобразователь частоты?
Что такое преобразователь частоты?
Как известно из теории электропривода, скорость вращения вала у асинхронного двигателя зависит от конструктивных особенностей электродвигателя, его параметров, частоты напряжения питающей сети и момента нагрузки. Как следует из этого утверждения, качественное регулирование частоты вращения вала электродвигателя достигается изменением такого параметра, как частота питания. Для этих целей и были созданы преобразователи частоты (Рисунок 1).
Рисунок 1.
Преобразователь частоты – это электронное устройство, которое преобразует электрическую энергию с первичными, входными параметрами U1, f1 (например, 220В, 50Гц) в электрическую энергию с выходными параметрами U2, f2.
Все преобразователи частоты, по способу преобразования энергии, разделяются на две группы:
— непосредственные – которые преобразуют переменный ток в переменный, без его выпрямления.
— двухступенчатые – наиболее распространены. В таком типе преобразователей происходит двойное преобразование энергии.
В состав двухступенчатого преобразователя частоты входит выпрямитель, который преобразует электрическую энергию переменного входного тока в энергию постоянного тока, а также инвертор, который совершает обратное преобразование постоянного тока в выходной переменный ток с новыми параметрами. Преобразователи двухступенчатого типа называют, также, преобразователями частоты со звеном постоянного тока.
По способу управления электродвигателем, преобразователи делят на:
— преобразователи с векторным управлением,
— преобразователи со скалярным управлением.
Обусловлено такое деление тем, что помимо частоты на выходе, существует необходимость в управлении выходным напряжением. В таких случаях, способ управления определяется алгоритмом вычисления значения напряжения выходного тока.
Значение напряжения в преобразователях частоты со скалярным управлением определяется при помощи зависимости U(f), которую рассчитывают при помощи метода линейной интерполяции по нескольким базовым точкам. Пользователь, при этом, может изменять значения этих точек.
В свою очередь, значение напряжения в преобразователях частоты с векторным управлением рассчитывают методом моделирования процессов, которые происходят в асинхронном двигателе. В таком случае, пользователю необходимо задать параметры электродвигателя.
Очевидно, что способ векторного управления позволяет осуществлять более качественную настройку и управление электродвигателем. Однако использование такого преобразователя частоты требует от пользователя достаточно глубоких знаний в области приводной техники и электромашин. Скалярный же способ управления позволяет обеспечить достаточное качество регулирования, даже при условии использования заводских настроек прибора. Следует учитывать, также, что использование векторного преобразователя для управления электроприводами насосов или вентиляторов не даёт существенного выигрыша по сравнению со скалярным.
На рисунке 2 представлена структурная схема преобразователя частоты со звеном постоянного тока. Рассмотрим её более подробно.
Рисунок 2.
Основу двухступенчатого преобразователя частоты, обладающего звеном постоянного тока, составляет трехфазный инвертор напряжения (АИН), обладающий широтно-импульсной модуляцией (ШИМ). При этом, в систему управления преобразователем входит программируемый микропроцессорный контроллер (МК), благодаря которому, по-сути, и происходит регулирование. В инверторе напряжения (АИН), преобразование постоянного напряжения в трехфазное переменное осуществляется посредством мостового транзисторного инвертора, состоящего из трех транзисторно-диодных модулей. Каждый модуль включает в себя два IGBT-транзистора с шунтирующими обратными диодами. В соответствии с ШИМ-алгоритмом МК, IGBT-транзисторы многократно переключаются в течение периода выходной частоты. Алгоритм ШИМ-управления микроконтроллера поддерживает требуемое регулирование частоты и действующее значение выходного напряжения, при этом, обеспечивается синусоидальность формы тока нагрузки.
ООО «ТД «Автоматика» является ведущим поставщиком преобразователей частоты таких известных марок, как: Siemens, Schneider Altivar, OMRON CIMR, ERMAN, Веспер, Hitachi, UNIDRIVE, Mitsubishi Electric, TECORP, Hyundai, DELTA ELECTRONICS, Vacon, Danfoss, ProStar, Emotron и предлагает отличные цены и сроки поставки на продукцию данных производителей.
Стоит отметить, что преобразователь частоты является микропроцессорным, интеллектуальным устройством. Преобразователь частоты использует микроконтроллер высокой производительности, в связи с чем, в современных преобразователях реализован целый ряд дополнительных функций и расширений, которые позволяют создавать системы автоматического управления, в связи с чем, отпадает необходимость использования контроллеров.
Преобразователи частоты. Различие между ними.
Настоящим прорывом в области регулируемого электропривода стало появление силовых преобразователей частоты или как их именуют в профильной среде — частотников. Это открытие кардинально изменило подход в проектировании систем электроприводов. Если относительно недавно при проектировании сложных механизмов, где без точного регулирование параметров (скорость, момент) не обойтись, выбирались двигатели постоянного тока — ДПТ, то с появлением частотников привода переменного тока начали активно вытеснять двигатели постоянного тока из данных систем. Даже в тяговых электроприводах асинхронный двигатель с коротко-замкнутым ротором вытесняет ДПТ последовательного возбуждения.
Содержание:
Классификация преобразователей частоты
Техническое устройство, преобразующее переменное напряжения одной частоты на входе, в изменяющееся по определенному закону переменное напряжение, но уже другой частотой на выходе называется преобразователем частоты (ПЧ). Бывают двух типов:
- Непосредственные
- Двухзвенные
Непосредственные – это реверсивный тиристорный преобразователь. Главное его достоинство в том, что он подключается напрямую в сеть без дополнительных устройств.
Двухзвенные – представляют собой транзисторный или тиристорный преобразователь. Но главное их отличие от непосредственных преобразователей в том, что для корректной и безопасной работы инвертора необходимо звено постоянного напряжения. Соответственно для подключения их к общепромышленным сетям необходим выпрямитель. Как правило изготавливаются комплектными (инвертор и выпрямитель поставляются вместе и работают от одной системы управления).
Двухзвенные преобразователи частоты
Двухзвенный или как его еще называют со звеном постоянного тока, созданный на базе АИН (автономный инвертор напряжения), содержит в комплекте выпрямитель и фильтр:
ЭМ – электрическая машина, АИН – автономный инвертор напряжения, Lф, Сф – индуктивности и емкости фильтра, fнз – задание частоты выхода инвертора, udз – задание выходного напряжения для выпрямителя, если используются управляемые выпрямители, СУВ, СУИ – системы управления выпрямителем и инвертором соответственно, uнз – задание выходного напряжения инвертора, В – выпрямитель. Пунктиром показаны связи, которые включаются в систему в зависимости от типа устройства.
Для улучшения качества энергии в звене постоянного напряжения и сглаживании пульсаций напряжения и тока используют L-C фильтр. Зачастую он имеют Г – образную схему включения, как показано выше. Также иногда используют фазовый сдвиг в цепи переменного напряжения путем включения обмоток трансформатора в треугольник и звезду:
Данная схема более дорогостоящая и может применяться только при использовании индивидуального трансформатора.
В данной системе выпрямитель может быть управляем или не управляем. Если он управляем, то функция регулирования напряжения ложится на него, если нет, то на АИН. Для рекуперации энергии в сеть выпрямитель должен быть полностью управляем и реверсивен (двухкомплектный). Управление частотным преобразователем производится импульсным методом. Самые распространенные методы это ШИР (широтно-импульсное регулирование) и ШИМ (широтно-импульсная модуляция).
Еще более широкое применение получили автономные инверторы тока (АИТ):
АИТ – автономный инвертор тока, СУИ, СУВ – системы управления преобразователями, УВ – управляемый выпрямитель, Lф – индуктивность фильтра, fнз – задание частоты выходного тока, іdз – задание выходного тока в звене постоянного тока.
В отличии от АИН, где регулируемой выходной величиной является напряжение, в АИТ регулируемой величиной является ток. Немаловажную роль в формировании выходного сигнала заданной частоты является частота коммутации транзисторов или тиристоров. Чем выше частота коммутации, тем лучше качество синусоиды на выходе частотника, но возрастают потери в преобразователе. Ниже приведен результат моделирования работы АИТ (на IGBT транзисторах) на активно-индуктивную нагрузку при различных частотах коммутации:
Частота коммутации 800 ГцЧастота коммутации 2000 ГцЧастота коммутации 8000 Гц
Как видно из графиков уменьшение частоты коммутации очень плохо влияет на выходное качество тока. Поэтому для каждого устройства необходимо подбирать частоту коммутации частотника соответственно качеству выходного напряжения или тока. Для оптимизации данных процессов на выходе преобразователя частоты иногда ставят L-C фильтр, для сглаживания пульсаций токов и напряжений:
Как видим из схемы — последовательно подключают индуктивность, для сглаживания пульсаций тока, и параллельно емкость, для сглаживания пульсаций напряжения.
Также работа частотника генерирует высшие гармоники в питающей сети:
Ток двух фаз питающего напряженияДля уменьшения влияния высших гармоник на сеть используют фильтро-компенсирующие устройства (ФКУ)
Ниже показаны принципиальные схемы преобразователей частоты.
Автономный инвертор напряжения с управляемым выпрямителем
Тиристоры VS1-VS6 выполняют роль выпрямителя. Транзисторы VT1-VT6 преобразуют постоянное напряжение в переменное заданной частоты. Диоды VD1-VD6 защищают транзисторы от перенапряжений, а также играет роль обратного выпрямителя при торможении машины. Транзистор VT7 выполняет роль ключа для резистора торможения Rб. При увеличении напряжения на емкости Сф выше заданного, транзистор VT7 открывается и вводится в работу тормозной резистор Rб, на котором рассеивается энергия переданная от электрической машины. При глубоком регулировании VD0 повышает коэффициент мощности выпрямителя.
Данный ПЧ не может рекуперировать энергию в сеть, а также насыщает выходное напряжение высшими гармониками и усложняет систему управления из-за необходимости управления УВ. При исполнении УВ двухкомплектным, рекуперирует энергию в сеть, но усложняет систему и делает ее более дорогостоящей. В настоящее время является устаревшим.
Автономный инвертор напряжения с неуправляемым выпрямителем
Диоды VD7-VD12 выполняют роль выпрямителя. Транзисторы VT1-VT6 преобразуют постоянное напряжение в переменное заданной частоты. Диоды VD1-VD6 защищают транзисторы от перенапряжений, а также играет роль обратного выпрямителя при торможении машины. Транзистор VT7 выполняет роль ключа для резистора торможения Rб. За счет использования ШИМ происходит регулирование амплитуды выходного напряжения и его частоты.
При использовании неуправляемого выпрямителя для торможения двигателя АИН переводится в режим управляемого выпрямителя, работающего таким образом, что напряжение на емкости Сф выше заданного, несмотря на уменьшение скорости вращения двигателя. При увеличении напряжения на емкости Сф открывается транзистор VT7 и энергия выделяемая электродвигателем гасится на тормозном резисторе.
Данный способ торможения получил названия инверторного торможения, хотя инвертирования на самом деле нет. Это связано с тем, что термин динамическое торможение для систем с асинхронным двигателем занят, под ним понимается пропускания постоянного тока через обмотки двигателя.
Главным недостатком такой системы есть отсутствие возможности рекуперировать энергию в сеть, но она получила широкое применение для систем, где не требуется частое торможение.
Рекуперирующий двухзвенный преобразователь частоты на основе обратимого преобразователя напряжения
ОПН – обратимый преобразователь напряжения. В данной схеме имеется два ОПН. ОПН1 работает в выпрямительном режиме и передает энергию через ОПН2, работающий в инверторном режиме, к двигателю. При торможении ОПН2, подключенный к двигателю переходит в выпрямительный режим, а ОПН1, подключенный к сети, в инверторный режим. При этом происходит рекуперация энергии в сеть. Если задать схеме управления на входе cosφ = ± 1, то во всех режимах при регулировании и торможении двигателя из сети будет потребляться или в сеть будет отдаваться практически только активная мощность, а ток будет практически синусоидален, что определяет минимальное вредное влияние на питающую сеть. Эти преобразователи на сегодняшний день являются самыми близким к идеальным.
Ниже приведена функциональная схема данного устройства:
В схеме имеются следующие элементы: ОПН1, подключенный к сети, ОПН2, подключенный к двигателю, датчики тока и напряжения ДТ1 и ДН1 на стороне сети и ДТ2 и ДН2 на стороне постоянного напряжения. Требуемая мощность на стороне постоянного напряжения определяется измерением средних значений Ud и Id, а затем и мощности Pd с помощью вычислителя ВМ, куда поступают сигналы с ДН2 и ДТ2 через фильтр Ф. По действующему значению напряжения сети U1, определенному с помощью вычислителя напряжения ВН, и с учетом заданного угла φ1 определяется ток I1зад, обеспечивающий заданную мощность. Блок ФСН формирует синусоидальное напряжение, повторяющее напряжение сети, а блок «φ1» формирует заданную синусоиду с учетом фазового сдвига φ1. В блоке «ЗАД i1» формируется заданная синусоида тока. В модуляторе М она сравнивается с сигналом датчика тока ДТ1 i1, и формируются управляющие импульсы, которые через усилитель мощности УМ поступают на транзисторы. Блок НТ определяет направление тока (выпрямительный или инверторный режим). Блок выбора режима ВР в соответствии с сигналом от НТ задает угол φ1.
Преимущества двухзвенного рекуперирующего ПЧ: независимость выходной частоты от входной, возможность получения высокого коэффициента мощности на стороне сети. К недостаткам можно отнести: высокая стоимость, сложность системы управления.
Рекуперирующие двухзвенный преобразователь частоты на основе инверторов тока
Автономный инвертор тока, преобразовывает постоянный ток, подаваемый на его вход, в пропорциональный по величине переменный ток. Режим источника тока на входе обеспечивается за счет большой индуктивности L и применения токостабилизирующей обратной связи, поддерживающей заданное значение тока Idз. АИТ выполнен по схеме с отсекающими диодами. Рекуперация энергии при торможении в АИТ возможна при сохранении направления тока за счет сдвига токов и напряжений, т.е. переводом АИТ в режим выпрямления за счет сдвига управляющих импульсов относительно фазных ЭДС электрической машины.
Энергия, передаваемая от электрической машины на сторону постоянного напряжения, должна быть далее передана в сеть переменного напряжения. Для этого управляемый выпрямитель на входе ПЧ должен быть переведен в инверторный режим. При этом сохраняется направление тока и не требуется установка дополнительного комплекта вентилей. Схема применяется в двигателях достаточно большой мощности. Недостатками схемы являются ее не очень хорошие характеристики, поэтому она не является перспективной.
Появление запираемых тиристоров позволило улучшить характеристики ДПЧ на основе АИТ.
Формирование выходного тока осуществляется совместно управляемым выпрямителем и автономным инвертором тока.
Показана временная диаграмма, отражающая моменты включенного и выключенного состояний тиристора V1. На участке соответствующим зоне 2, ключ V1 включен постоянно, и ток сглаживающего дросселя непрерывно поступает в фазу А двигателя. Для формирования тока в зонах 1 и 3 необходимо соответствующим образом переключать тиристоры. Для обеспечения нарастания и спадания тока (зоны 1 и 3) обычно используется два метода – трапецеидальный и метод выборочного исключения гармоник.
При использовании первого метода моменты коммутации ключей АИТ определяются по пересечению линейно нарастающего сигнала и опорного сигнала пилообразной формы следующего с несущей частотой, при втором методе моменты коммутации ключей рассчитываются заранее исходя из условия подавления высших гармоник определенного порядка (5 и 7 и т.д.). В этой схеме улучшается синусоидальность тока, протекающего по фазам двигателя. Но сохраняются все недостатки, возникающие при питании от сети управляемых выпрямителей напряжения. Преобразователи частоты на основе инверторов тока наиболее применимы в электроприводе синхронных машин, где на выходе вместо автономного инвертора тока включается инвертор тока, ведомый электрической машиной.
Таким образом, на входе и на выходе ПЧ включаются однокомплектные рекуперирующие преобразователи (ОРП) на тиристорах. При этом ведомый инвертор полностью аналогичен выпрямителю, подключенному к сети. Коммутация вентилей ведомого инвертора осуществляется за счет ЭДС электрической машины.При низкой скорости вращения электрической машины эта ЭДС недостаточна для коммутации вентилей. Поэтому при пуске коммутация осуществляется путем прерывания тока в цепи постоянного тока включением и запиранием выпрямителя.
Непосредственные преобразователи частоты
При использовании НПЧ напряжение из сети подается через управляемые вентили на двигатель. В каждой фазе НПЧ установлен реверсивный двухкомплектный преобразователь с совместным или раздельным управлением силовыми комплектами.
На рис. 1а приведена схема трехфазно-однофазного НПЧ на основе трехфазных нулевых схем. Он преобразует трехфазное напряжение в однофазное, но с регулируемой частотой.Комплекты В и Н переключаются, и на выходе получается двуполярное напряжение. Для управления преобразователями используют определенные законы управления — прямоугольный и синусоидальный. Если используют прямоугольный принцип управления, то алгоритм работы будет таков: при прохождении одной полуволны напряжения, на один из комплектов подаются управляющие импульсы с углом управления (углом задержки) a = const. Этот комплект будет работать в режиме выпрямителя, а затем с углом управления (углом опережения) b = a. Чтоб снизить ток необходимо перейти в инверторный режим (рис. 1 б). Для избежания короткого замыкания в самом инверторе необходимо чтоб ток снизился до нуля – это называется бестоковой паузой. После осуществления бестоковой паузы в работу включается второй комплект.
Если используют синусоидальное управление, то гладкая составляющая выходного напряжения должна изменятся по синусоидальному закону, для этого угол управления a непрерывно меняется (рис. 1 в).
Рисунок 1.Схема трехфазно-трехфазного НПЧ, выполненного на основе трехфазных мостовых схем. Ниже приведена схема.
Данный тип преобразователей не получил широкого применения из-за ряда недостатков при его применении. А это: невозможность полного регулирования выходной частоты (при использовании трехфазных мостовых схем диапазон регулирования 25-45 Гц, а при нулевых 15-45 Гц). Постоянная коммутация вентилей, что приводит к ухудшению коэффициента мощности, а также плохое качество выходного напряжения и большое влияние на питающую сеть.
Преимуществом можно признать то, что у таких преобразователей более высокий КПД, из-за однократного преобразования энергии.
Наиболее распространены преобразователи частоты на базе АИТ и АИН на IGBT транзисторах, в силу лучших показателей качества энергии на выходе преобразователя и их влияния на сеть.
Преобразователи частоты для управление тягодутьевыми машинами
Для регулирования режима работы паровых и водогрейных котлов требуется изменять соотношение топливо-воздух и поддерживать постоянное разрежение в топке котла. Существующие ручные и автоматические системы регулирования работы котла основаны на регулировании расходов воздуха и уходящих газов заслонками, приводимыми в движение электроприводами типа «МЭО». При этом мощные двигатели тягодутьевых машин включаются от сети и их режим работы не регулируется. Применение частотно-регулируемых приводов тягодутьевых машин позволяет снизить потребление электроэнергии ими на величину до 70% за счет отказа от регулирования заслонками и снижения непроизводительных потерь мощности. Также за счет снижения средних рабочих оборотов двигателей дымососов и дутьевых вентиляторов уменьшается уровень вибраций и продлевается срок службы механических деталей приводов. Поэтому при модернизации котельных в первую очередь целесообразна установка частотно-регулируемых приводов на дымососы и дутьевые вентиляторы.
Рассмотрим подробней схему (рис. 1) управления потоком дымовых газов с помощью преобразователя частоты (ПЧ). То есть вместо механического перекрытия дымоходов шиберами, преобразователи частоты будут изменять частоту вращения роторов двигателей, тем самым изменяя величину потока дымовых газов и разрежение в топках котлов, а также значительно снижая потребление электроэнергии двигателями дымососов.
Рис.1 Функциональная схема управления электродвигателем дымососа преобразователем частоты
РЕ – датчик разрежения; М – асинхронный электродвигатель дымососа; ПЧ – преобразователь частоты
Управление тягой дымососов осуществляется следующим образом. Датчик давления (РЕ) измеряет величину давления-разрежения в топке котла и передает результат измерения с помощью токового сигнала 4-20 мА на частотный преобразователь (ПЧ). Встроенный в ПЧ ПИД- регулятор обрабатывает аналоговый сигнал с датчика, и в соответствии с заданием изменяют частоту питающего напряжения (в пределах 5-50 Гц), соответственно изменяется и частота вращения ротора двигателя дымососа/вентилятора. Таким образом, соблюдается технологический процесс удаления продуктов горения из топок котлов. Следовательно, мы наблюдаем снижение частоты вращения ротора, силы тока, а значит и потребление электроэнергии, в отличие от постоянной работы двигателя на номинальной нагрузке.
Основные преимущества от внедрения ПЧ для управления тягодутьевыми машинами:
- Стабилизация процесса управления разрежением в топках котлов, сглаживание переходных процессов (точность удержания частоты 0,1 Гц).
- Улучшение процессов горения за счет создания стабильной тяги.
- Защита двигателей дымососов: от перегрузки по току, от перегрева, от межфазного замыкания, от обрыва фаз, от перекоса фаз, от заклинивания (по коэффициенту мощности).
- Управление двигателями с высокой точностью, получение высокого крутящего момента, снижение шума и вибрации, плавный пуск и остановка двигателей, функция автоматического перезапуска двигателей вследствие скачка напряжения.
- Значительная экономия электроэнергии.
Для подбора преобразователя частоты для вашего дымососа/вентилятора, заполните форму «Получить коммерческое предложение».
Получить коммерческое предложение
Выбор преобразователя частоты для привода переменного тока
Принцип работы преобразователя частоты для асинхронного двигателя основан на зависимости скорости вращения и момента силы на валу двигателя переменного тока от частоты напряжения питания. Частотные регуляторы изменяют частоту поданного на электродвигатель напряжения, тем самым регулируя скорость вращения ротора и момент силы.
Структурная схема преобразователя частоты для асинхронных двигателей:
Правильный выбор преобразователя частоты для асинхронного двигателя позволяет создать эффективную и надежную систему практически для любого типа машин, как для промышленного, так и для бытового применения.
Когда речь идет о мощности движка, подразумевается механическая мощность на валу. При подборе электродвигателя необходимо учитывать КПД и коэффициент мощности. Момент на валу генератора постоянного тока обычно представлен двумя составляющими:
- статической: момент, затрачиваемый на преодоление сил сопротивления и трения в рабочем механизме;
- динамической: момент, затрачиваемый на преодоление инерции маховых масс самого электропривода, присоединенной трансмиссии и рабочего механизма.
Существует довольно широкий класс промышленных механизмов, в которых момент на валу электродвигателя однозначно связан со скоростью вращения, а режимы пуска и торможения составляют незначительную часть рабочего цикла (центробежные насосы и вентиляторы, транспортеры, конвейеры, рольганги и т.п). В этих случаях тяговый преобразователь можно выбрать в соответствии с мощностью оборудования: номинальная мощность должна быть больше или равна мощности, потребляемой мотором через цепь питания.
Для регуляторов частоты, предназначенных для работы в составе транспортеров и конвейеров характерна перегрузочная способность до 150%, а в приводах вентиляторов и насосов – до 120%. С учетом этого, в некоторых случаях можно выбрать преобразователь на ступень ниже по мощности.
Из двух компонентов электропривода – частотник и электродвигатель – второй существенно «крепче» в электротехническом отношении. В асинхронном двигателе с короткозамкнутым ротором, например, при прямом пуске ток может достигать значения в 5…7 раз выше номинального, а в некоторых случаях – до 12. Если температура обмоток не превышает установленную, такой режим обходится без последствий. Частотный преобразователь обладает более скромными возможностями из-за ограничений силовых полупроводниковых приборов. В большинстве моделей допустимый предел перегрузки находится в диапазоне 120…200% по отношению к номинальному току. Поскольку ток двигателя напрямую определяет усилие на валу, очевидно, что динамические возможности привода будут определяться ограничением тока частотника. В этих случаях обязательна проверка механизма по предельному току при выполнении разгона максимальной интенсивности, или наоборот, возможность обеспечения времени разгона при предельном токе.
Если предельный ток превышает ток ограничения системы, или время разгона больше, чем требуемое, необходимо выбирать частотник, стоящий выше по шкале мощностей. Иногда производитель указывает допустимое время разгона при предельно допустимом токе – до 60 сек.
Схема асинхронного двигателя с короткозамкнутым ротором (реверсивный пуск):
Как выбрать преобразователь частоты для асинхронного двигателя? Правильный выбор оборудования невозможен без учета решений по режимам торможения:
- Рекуперативное торможение с передачей энергии в электросеть.
- Динамическое торможение с отводом энергии промежуточного звена частотника на дополнительное сопротивление.
- Торможение противовключением. Обмотка привода подключена к постоянному напряжению; возникающий магнитный поток способствует появлению тормозного усилия, при этом энергия рассеивается на обмотках электродвигателя и в источнике постоянного напряжения.
После согласования значений напряжения, количества фаз и частоты питающей сети важно оценить диапазоны колебаний этих характеристик в реальных условиях эксплуатации. Значительные динамические нагрузки приводят к сильным колебаниям напряжения питания. Это можно оценить, зная реактивное сопротивление питающей сети или, по крайней мере, частичного комплексного электрического сопротивления, вносимого питающим трансформатором и подводящими кабелями. Ситуация усугубляется, когда для частотного преобразователя требуется сетевой дроссель. Падение напряжения питания частотника при максимальных нагрузках должно оставаться в допустимых пределах. В противном случае необходимо определить: позволяют ли функциональные возможности регулятора сохранить работоспособность оборудования при провале питающего напряжения.
Главный вопрос подбора частотника по этим критериям – выбор метода управления. Различают 4 метода управления:
- Скалярный метод: подходит для электроприводов с известной взаимозависимостью момента электродвигателя и частоты вращения. При этом диапазон регулирования должен быть невелик, минимальная частота 5…10 Гц.
- Скалярный метод управления с обратной связью по вращающему моменту. Применяется для точного поддержания и регулирования оборотов механизма. И здесь необходимо знать точную взаимозависимость нагрузки и скорости. Обычно в режиме скалярного управления реализуется определенного вида соотношение U/f (питающее напряжение к частоте питающего напряжения).
- Векторный метод управления. Применяется в случаях, когда взаимозависимость момента и скорости не известна, случайна или аналитически не выражается. Но при этом необходимо поддерживать заданное значение момента нагрузки при широком диапазоне регулирования периода вращения.
- Векторный метод управления с обратной связью по скорости. Применяется в механизмах со сложным характером нагрузки при необходимости поддерживать и момент, и скорость в широком диапазоне и с высокой точностью. Возможность реализации векторного метода управления подразумевает присутствие в составе системы относительно мощного процессора, способного в течение нескольких десятков миллисекунд произвести полный пересчет всего вектора параметров привода. В качестве датчика скорости обычно применяется инкрементальный энкодер, не всегда присутствующий в базовой комплектации.
Выпускаемые модели частотных регуляторов обладают богатым набором защитных функций, незначительно отличающимся у отдельных моделей. Поэтому подбор по защитным функциям важнее проводить с точки зрения наличия возможностей, обеспечивающих сохранение работоспособности электропривода в аварийном режиме. Необходимо установить, каковы действия оборудования после срабатывания защитных функций:
- Каким образом будет тормозиться рабочий механизм после отключения частотника. Торможение «на выбеге» не всегда приемлемо по соображениям безопасности.
- Возможно ли сохранение работы привода с пропорциональным изменением скорости или автоматический перезапуск (например, при отключении сети питания), «подхват» вращающегося двигателя в установках, обладающих эффектом «ветряной мельницы», или двигающегося по инерции (при восстановлении питания) и т.п.
Если имеющиеся функциональные возможности обеспечивают сохранение работоспособности мотора или даже обеспечивают приемлемый режим его работы, то можно считать, что вопрос выбора оборудования по критериям защитных функций решен.
Место установки и эксплуатации частотного регулятора должно полностью удовлетворять паспортным требованиям по температурному диапазону, влажности, высоте положения, условиям вибрации и запыленности, степени защиты по IP. Однако есть один неочевидный момент, влияющий на выбор частотного преобразователя для асинхронного двигателя при конкретных условиях размещения. Существенным является расстояние удаленности тягового преобразователя от электродвигателя. При превышении определенного расстояния, зависящего от модели частотника, типа кабеля, тока и др., необходима установка специального моторного дросселя. Появление этого элемента снижает эффективные характеристики привода. В качестве альтернативы возможен переход к другой модели частотного преобразователя.
Функция преобразователя частоты и базовая.
Преобразователь частоты преобразует частоту переменного тока, то есть преобразует переменный ток 50 или 60 Гц в переменный ток любой желаемой частоты. Устройство также может изменять напряжение, если это необходимо.
Зачем нужен преобразователь частоты
Преобразователи частотыиспользуются для облегчения точного управления критическими процессами, такими как: система охлаждения (радиаторы, насосы), топливная система (бустер, нагреватели…), вентиляция (вентиляция машинного зала).Преобразователь частоты также является энергосберегающим и во многих случаях ограничителем шума.
Как работает преобразователь частоты:
Для изменения частоты переменного тока преобразователь частоты проходит двухступенчатое преобразование. Сначала он преобразует переменный ток в постоянный, затем, во-вторых, постоянный ток в переменный ток желаемой частоты.
Итак, преобразователь частоты имеет два рабочих набора: сначала схема выпрямителя преобразует переменный ток в постоянный ток, а затем схема инвертора с тиристорами / IGCT / IGBT преобразует постоянный ток в переменный ток с желаемой частотой.Изменение или сдвиг частоты происходит в ступени преобразователя.
Если требуется преобразование напряжения, трансформатор обычно включается в цепь входа или выхода переменного тока, и этот трансформатор может также обеспечивать гальваническую развязку между цепями входа и выхода переменного тока.
Батарея также может быть добавлена к схеме постоянного тока, чтобы улучшить работу преобразователя при кратковременных перебоях в подаче питания.
- переменного тока Напряжение сети -3 x 400… 500 В переменного тока, 50/60 Гц.
- Сетевой фильтр — Ограничивает электрические помехи в сети электроснабжения общего пользования и улучшает электромагнитную совместимость
устройства в отношении помех от сети электроснабжения. - Выпрямитель — Преобразует трехфазное напряжение переменного тока в напряжение постоянного тока.
- Шина постоянного тока — Напряжение постоянного тока в режиме ожидания = √2 x линейное напряжение [В]
- Конденсаторы шины постоянного тока — Сглаживает напряжение шины постоянного тока
- Инвертор — Преобразует D.C. напряжение в переменное напряжение переменного тока с переменной частотой.
- Напряжение двигателя — Переменное напряжение переменного тока, 0-95% напряжения питания.
Переменная выходная частота: 0 — 700 Гц - Плата управления — Плата управления управляет преобразователем частоты. Он генерирует последовательность импульсов, которая используется для преобразования
напряжения постоянного тока в переменное напряжение переменного тока с переменной частотой.
Принципиальная схема силовой части преобразователя
Блок-схема преобразователя частоты принципиальная схема преобразователя частоты AS Блокировка пуска; EW Трансформатор замыкания на землю; Выпрямитель GL с тиристорной подзарядкой; SE Текущее обнаружение; Блок питания импульсный СНТ; WS Управление инвертором; Инвертор WR; Шина постоянного тока ZK Вариант устройства
; BC Тормозной прерыватель.
Принадлежности
BW Тормозной резистор; MF Моторный фильтр; Сетевой фильтр NF
Дополнительная литература
Основы преобразователя частоты
Для достижения высокой эффективности, отличной управляемости и энергосбережения в приложениях, связанных с промышленными асинхронными двигателями, необходимо использовать системы регулируемых преобразователей частоты. Система преобразователя частоты в настоящее время представляет собой двигатель переменного тока, питаемый от статического преобразователя частоты.Современный преобразователь частоты отлично подходит для двигателей переменного тока и прост в установке. Однако одна важная проблема связана с несинусоидальным выходным напряжением. Этот фактор вызвал массу нежелательных проблем. Повышенные потери в асинхронном двигателе, шум и вибрация, пагубное воздействие на систему индукционной изоляции и выход из строя подшипников являются примерами проблем систем, связанных с преобразователями частоты. Повышенные индукционные потери означают снижение выходной мощности индукции для предотвращения перегрева.Лабораторные измерения показывают, что повышение температуры может быть на 40% выше при использовании преобразователя частоты по сравнению с обычными источниками питания. Постоянные исследования и совершенствование преобразователей частоты помогли решить многие из этих проблем. К сожалению, кажется, что решение одной проблемы акцентировало внимание на другой. Снижение потерь в индукции и преобразователе частоты ведет к увеличению вредного воздействия на изоляцию. Производители индукционных устройств, конечно, знают об этом. На рынке начинают появляться новые индукционные конструкции (инверторно-резистивные двигатели).Лучшая изоляция обмотки статора и другие конструктивные улучшения гарантируют, что асинхронные двигатели будут лучше адаптированы для применений с преобразователями частоты. Введение
Одной из наиболее серьезных проблем асинхронного двигателя была сложность его адаптации к регулировке скорости. Синхронная скорость двигателя переменного тока определяется следующим уравнением.
n s = 120 * f / pn с = синхронная скорость
f = частота электросети
p = номер полюса
Единственный способ отрегулировать скорость для данного количества полюсов — это изменить частоту.
Основной принцип
Теоретически основная идея проста, процесс преобразования стабильной частоты линии электропередачи в переменную частоту в основном выполняется в два этапа:
- Источник переменного тока преобразуется в постоянное напряжение.
- Постоянное напряжение преобразуется в переменное напряжение желаемой частоты.
Различные типы преобразователей частоты
Инвертор источника напряжения PWM (VSI)
ШИМ (широтно-импульсная модуляция) широко применяется в промышленности преобразователей частоты. Они доступны от нескольких сотен ватт до мегаватт.
ШИМ-преобразователь не обязательно должен точно соответствовать нагрузке, ему нужно только убедиться, что нагрузка не потребляет ток, превышающий номинальный ток ШИМ-преобразователя. Вполне возможно запустить индукцию 20 кВт с преобразователем PWM на 100 кВт.Это большое преимущество, которое упрощает работу приложения.
В настоящее время преобразователь частоты ШИМ использует биполярный транслятор с изолированным затвором (IGBT). Современные преобразователи частоты с ШИМ работают очень хорошо и не сильно отстают от конструкций, использующих синусоидальный источник питания — по крайней мере, не в диапазоне мощностей до 100 кВт или около того.
Инвертор источника тока (CSI)
Инвертор источника тока представляет собой грубую и довольно простую конструкцию по сравнению с ШИМ. Он использует простые тиристоры или тиристоры в цепях питания, что делает его намного дешевле.Кроме того, он очень надежен. Конструкция обеспечивает защиту от короткого замыкания из-за больших индукторов в звене постоянного тока. Он крупнее ШИМ.
Раньше инвертор источника тока был лучшим выбором для больших нагрузок. Недостатком инвертора источника тока является необходимость согласования с нагрузкой. Преобразователь частоты должен быть рассчитан на используемый асинхронный двигатель. Фактически, сама индукция является частью перевернутой цепи.
Инвертор источника тока подает на асинхронный двигатель ток прямоугольной формы.На низких скоростях индукция создает зубцовый момент. Этот тип преобразователя частоты будет создавать больше шума на источнике питания по сравнению с преобразователем PWM. Нужна фильтрация.
Сильные переходные процессы выходного напряжения являются дополнительным недостатком инвертора источника тока. В худших случаях переходные процессы могут почти в два раза превышать номинальное напряжение. Также существует риск преждевременного износа изоляции обмотки при использовании этого преобразователя частоты.Этот эффект наиболее серьезен, когда нагрузка не соответствует преобразователю частоты должным образом. Это может произойти при работе с частичной нагрузкой. Такой преобразователь частоты все больше теряет свою популярность.
Векторное управление потоком (FVC)
Управление вектором магнитного потока — это более сложный тип преобразователя частоты, который используется в приложениях, требующих экстремального управления. Например, на бумажных фабриках необходимо очень точно контролировать скорость и силу растяжения.
Преобразователь частоты FVC всегда имеет какой-то контур обратной связи. Такой тип преобразователя частоты обычно не представляет особого интереса для насосов. Это дорого, и его преимуществами нельзя воспользоваться.
Влияние на двигатель
Индукция лучше всего работает при питании от источника чистого синусоидального напряжения. Чаще всего это происходит при подключении к надежному источнику питания от электросети.
Когда индукция подключена к преобразователю частоты, на него будет подаваться несинусоидальное напряжение — больше похожее на напряжение срезанной прямоугольной формы.Если мы подаем 3-фазную индукцию с симметричным 3-фазным квадратичным напряжением, все гармоники, кратные трем, а также четные числа будут исключены из-за симметрии. Но остались цифры 5, 7 и 11, 13 и 17, 19 и 23, 25 и так далее. Для каждой пары гармоник меньшее число вращается в обратном направлении, а большее число — в прямом.
Скорость асинхронного двигателя определяется основным числом, или числом 1, из-за его сильного доминирования.Что теперь происходит с гармониками?
С точки зрения гармоник кажется, что индукция заблокировала ротор, что означает, что скольжение для гармоник составляет приблизительно 1. Это не дает никакой полезной работы. В результате в основном возникают потери в роторе и дополнительный нагрев. В частности, в нашем приложении это серьезный исход. Однако с помощью современных технологий можно устранить большую часть гармоник в индукционном токе, тем самым уменьшив дополнительные потери.
Преобразователь частоты до
Самые ранние преобразователи частоты часто использовали простое прямоугольное напряжение для питания асинхронного двигателя.Они вызвали проблемы с нагревом, и индукция работала с типичным шумом, вызванным пульсацией крутящего момента. Намного лучшая производительность была достигнута, если просто исключить пятый и седьмой. Это было сделано за счет дополнительного переключения сигнала напряжения.
Преобразователь частоты сегодня
В наши дни эта техника стала более сложной, и большинство недостатков остались в прошлом. Разработка мощных полупроводниковых приборов и микропроцессора позволила адаптировать схему переключения таким образом, чтобы исключить большинство вредных гармоник.
Для преобразователей частоты среднего диапазона мощности (до нескольких десятков кВт) доступны частоты переключения до 20 кГц. Индукционный ток с этим типом преобразователя частоты будет почти синусоидальным.
При высокой частоте коммутации индукционные потери остаются низкими, но потери в преобразователе частоты увеличиваются. Общие потери увеличиваются при чрезмерно высоких частотах переключения.
Немного теории двигателя
Производство крутящего момента в асинхронном двигателе может быть выражено как
T = V * τ * B [Нм]V = Активный объем ротора [м 3 ]
τ = ток на метр окружности отверстия статора
B = Плотность потока в воздушном зазоре
B = пропорционально (E / ω) = E / (2 * π * f)ω = угловая частота напряжения статора
E = индуцированное напряжение статора
Для достижения наилучших характеристик на различных скоростях становится необходимым поддерживать соответствующий уровень намагничивания для индукции для каждой скорости.
Диапазон различных характеристик крутящего момента показан на следующем рисунке. Для нагрузки с постоянным крутящим моментом соотношение V / F должно быть постоянным. Для нагрузки с квадратичным крутящим моментом постоянное отношение V / F приведет к чрезмерно высокой намагниченности при более низкой скорости. Это приведет к излишне высоким потерям в стали и потерям сопротивления (I 2 R).
Лучше использовать квадратное отношение V / F. Таким образом, потери в стали и потери I 2 R снижаются до уровня, более приемлемого для фактического момента нагрузки.
Если мы посмотрим на рисунок, мы обнаружим, что напряжение достигло своего максимума и не может быть увеличено выше базовой частоты 50 Гц. Диапазон выше базовой частоты называется диапазоном ослабления поля. Следствием этого является невозможность поддерживать необходимый крутящий момент без увеличения тока. Это приведет к проблемам с нагревом того же типа, что и при нормальном пониженном напряжении от синусоидальной электросети. Скорее всего, будет превышен номинальный ток преобразователя частоты.
Работа в диапазоне ослабления поля
Иногда возникает соблазн запустить насос на частотах выше частоты промышленной сети, чтобы достичь рабочей точки, которая в противном случае была бы невозможна. Это требует дополнительной осознанности. Мощность на валу насоса будет увеличиваться в кубе скорости. Превышение скорости на 10% потребует на 33% больше выходной мощности. Грубо говоря, можно ожидать, что повышение температуры увеличится примерно на 75%.
Тем не менее, есть предел тому, что мы можем выжать из индукции при превышении скорости.Максимальный крутящий момент индукции будет падать как функция 1 / F в диапазоне ослабления поля.
Очевидно, что индукция пропадет, если преобразователь частоты не сможет поддерживать ее с напряжением, которое соответствует необходимому крутящему моменту.
Снижение номинальных значений
Во многих случаях индукция работает на максимальной мощности от синусоидальной электросети, и любой дополнительный нагрев недопустим. Если такая индукция питается от преобразователя частоты какого-либо типа, то, скорее всего, она должна работать с меньшей выходной мощностью, чтобы избежать перегрева.
Нет ничего необычного в том, что преобразователь частоты для больших насосов мощностью более 300 кВт добавляет дополнительные индукционные потери в размере 25–30%. В верхнем диапазоне мощностей только некоторые преобразователи частоты имеют высокую частоту переключения: от 500 до 1000 Гц обычно для преобразователей частоты предыдущего поколения.
Для компенсации дополнительных потерь необходимо уменьшить выходную мощность. Мы рекомендуем общее снижение номинальных характеристик на 10–15% для больших насосов.
Поскольку преобразователь частоты загрязняет питающую сеть гармониками, энергокомпания иногда предписывает входной фильтр.Этот фильтр снижает доступное напряжение обычно на 5–10%. Следовательно, индукция будет работать при 90–95% номинального напряжения. Следствие — дополнительный обогрев. Может потребоваться снижение номинальных характеристик.
Пример
Предположим, что выходная мощность фактического двигателя насоса составляет 300 кВт при 50 Гц, а повышение температуры составляет 80 ° C при использовании синусоидальной электросети. Дополнительные потери в 30% приведут к нагреву на 30%. Консервативное предположение состоит в том, что повышение температуры зависит от квадрата мощности на валу.
Чтобы температура не превышала 80 ° C, необходимо уменьшить мощность на валу до
P пониженный = √ (1 / 1,3) * 300 = 263 кВтУменьшение может быть достигнуто либо уменьшением диаметра рабочего колеса, либо снижением скорости.
Преобразователь частоты Потери
Когда определяется общий КПД системы преобразователя частоты, необходимо учитывать внутренние потери преобразователей частоты. Эти потери преобразователя частоты непостоянны, и их нелегко определить.Они состоят из постоянной части и части, зависящей от нагрузки.
Постоянные потери:
Потери на охлаждение (вентилятор охлаждения) — потери в электронных схемах и так далее.
Потери, зависящие от нагрузки:
Коммутационные потери и свинцовые потери в силовых полупроводниках.
На следующем рисунке показан КПД преобразователя частоты как функция частоты при кубической нагрузке для блоков мощностью 45, 90 и 260 кВт. Кривые характерны для преобразователей частоты в диапазоне мощностей 50–300 кВт; с частотой коммутации около 3 кГц и с IGBT второго поколения.
Влияние на изоляцию двигателя
Выходные напряжения современных преобразователей частоты имеют очень короткое время нарастания напряжения.
dU / dT = 5000 В / мкс — обычное значение.Такой крутой скачок напряжения вызовет чрезмерное напряжение в изоляционных материалах индукционной обмотки. При малом времени нарастания напряжение в обмотке статора распределяется неравномерно. При синусоидальном источнике питания напряжение между витками индукционной обмотки обычно равномерно распределяется.С другой стороны, с преобразователем частоты до 80% напряжения будет падать на первом и втором витках. Поскольку изоляция между проводами является слабым местом, это может быть опасным для индукции. Короткое время нарастания также вызывает отражение напряжения в индукционном кабеле. В худшем случае это явление удвоит напряжение на индукционных выводах. Индукция, подаваемая от преобразователя частоты на 690 вольт, может подвергаться воздействию напряжения до 1900 вольт между фазами.
Амплитуда напряжения зависит от длины индукционного кабеля и времени нарастания. При очень коротком времени нарастания полное отражение происходит в кабеле длиной от 10 до 20 метров.
Для обеспечения работы и длительного срока службы двигателя абсолютно необходимо, чтобы обмотка была адаптирована для использования с преобразователем частоты. Индукторы для напряжений выше 500 вольт должны иметь усиленную изоляцию. Обмотка статора должна быть пропитана смолой, обеспечивающей изоляцию без пузырьков или полостей.Тлеющие разряды часто начинаются вокруг полостей. Это явление в конечном итоге приведет к разрушению изоляции.
Есть способы защитить двигатель. Помимо усиленной системы изоляции, может потребоваться установка фильтра между преобразователем частоты и индукцией. Такие фильтры можно приобрести у большинства известных поставщиков преобразователей частоты.
Фильтр обычно замедляет время нарастания напряжения от
dU / dT = 5000 В / мкс до 500-600 В / мксВыход из строя подшипника
Поломка вращающегося оборудования часто может быть связана с выходом из строя подшипников.Помимо чрезмерного нагрева, недостаточной смазки или усталости металла, электрический ток через подшипники может быть причиной многих загадочных поломок подшипников, особенно при больших индукциях. Это явление обычно вызвано несимметрией магнитной цепи, которая индуцирует небольшое напряжение в структуре статора, или током нулевой последовательности. Если потенциал между конструкцией статора и валом становится достаточно высоким, через подшипник будет происходить разряд.Небольшие электрические разряды между телами качения и дорожкой качения подшипника в конечном итоге могут повредить подшипник.
Использование преобразователей частоты увеличивает вероятность отказа подшипников такого типа. Технология переключения современного преобразователя частоты вызывает ток нулевой последовательности, который при определенных обстоятельствах проходит через подшипники.
Самый простой способ решить эту проблему — поставить преграду для тока. Обычный метод заключается в использовании подшипника с изолирующим покрытием на наружном кольце.
Выводы
Использование преобразователя частоты не означает беспроблемного использования. Множество вопросов, на которые необходимо обратить внимание при проектировании. Будет ли необходимо, например, ограничивать доступную мощность на валу для предотвращения чрезмерного нагрева? Во избежание этой проблемы может потребоваться работа с более низкой выходной мощностью.
Будет ли изоляция асинхронного двигателя сопротивляться воздействию инвертора? Нужна ли фильтрация? Современные эффективные инверторы оказывают пагубное влияние на изоляцию из-за высокой частоты коммутации и короткого времени нарастания напряжения.
Какую максимальную длину кабеля можно использовать без полного отражения напряжения? Амплитуда напряжения зависит как от длины кабеля, так и от времени нарастания. При очень коротком времени нарастания полное отражение будет происходить в кабелях длиной от 10 до 20 метров.
Можно ли использовать изолированные подшипники, чтобы предотвратить попадание тока нулевой последовательности в подшипники?
Только когда мы решим все эти вопросы, мы сможем принимать правильные решения относительно использования преобразователя частоты.
СХЕМА ПРЕОБРАЗОВАТЕЛЯ ЧАСТОТЫ НА НАПРЯЖЕНИЕ
Преобразователь частоты в напряжение — это электронное устройство, которое преобразует синусоидальную входную частоту в пропорциональный ток или выходное напряжение. Базовая схема включает операционные усилители и RC-цепи (цепи резисторных конденсаторов). Операционные усилители используются для обработки сигналов. И RC-сети используются для удаления частотно-зависимой пульсации. На схеме ниже показана принципиальная схема преобразователя частоты в напряжение с использованием сетей ОУ и RC:
Входная частота этого преобразователя может находиться в диапазоне 0-10 кГц.А выходное напряжение может находиться в диапазоне от 0 до -10 В.
Блок-схема преобразователя F-V
На приведенной выше блок-схеме показан преобразователь частоты в напряжение. Схема заряжает конденсатор до определенного уровня. В него включен интегратор, и конденсатор разряжается в этот интегратор или в цепь нижних частот. Это происходит для всех циклов входного сигнала. Прецизионный переключатель и моностабильный мультивибратор генерируют импульс определенной амплитуды и периода, который подается в сеть усреднения.Следовательно, мы получаем на выходе постоянное напряжение.
СХЕМА F-V С ИСПОЛЬЗОВАНИЕМ LM331
Это принципиальная схема преобразователя частоты в напряжение, использующего LM331.
Photo Credit circuittodayЭта ИС в основном представляет собой преобразователь напряжения в частоту, но может использоваться как преобразователь частоты в напряжение. Его приложения также включают аналого-цифровое преобразование и долгосрочную интеграцию.
Преобразователь FV РАБОЧИЙ
В этой схеме lm331 используется для преобразования частоты в напряжение.Напряжение на выходе пропорционально частоте на входе. Это 8-контактная микросхема. Источник подключен к выводу 8 и подает 15 В постоянного тока. Контакты 3 и 4 подключены к земле. Входная частота задается на контакте 6, а выходное напряжение снимается с контакта 1. Входная частота дифференцируется с помощью резистора R7 и конденсатора C3, а затем результирующая последовательность импульсов поступает на контакт 6. Схема таймера запускается встроенной схемой. -в схеме компаратора в ИС, когда отрицательный фронт импульсной последовательности появляется на выводе 6.
Ток, протекающий на выводе 6, пропорционален значениям конденсатора C1 и резистора R1 (которые также известны как компоненты синхронизации) и входной частоте. Таким образом, мы получаем выходное напряжение на резисторе R4, которое пропорционально входной частоте. В этой цепи используется 15 В постоянного тока, но рабочее напряжение IC может быть от 5 до 30 вольт постоянного тока. Величина резистора R3 зависит от напряжения питания.
ПРИМЕНЕНИЕ ПРЕОБРАЗОВАТЕЛЕЙ F-V
Эти преобразователи используются в широком диапазоне приложений, таких как связь, управление мощностью, измерительные и измерительные системы и т. Д.
Мы подробно обсудим следующие приложения:
- Преобразователь частоты в напряжение в тахометрах.
- Измерение разности частот.
ПРЕОБРАЗОВАТЕЛЬ F / V И ЦИФРОВОЙ ТАХОМЕТР
Цифровой тахометр — это электронное устройство, измеряющее скорость вращения колеса. Они отображают скорость вращения в виде напряжения, поэтому в них требуется преобразователь частоты в напряжение. На схеме ниже показан цифровой тахометр.
Цифровой тахометр
Частоту возникновения некоторых событий можно измерить с помощью измерителя скорости. Он считает события за определенный период времени, а затем делит количество событий на общее время, и, следовательно, мы получаем коэффициент. Это теория работы простого тахометра.
Мы используем микросхему LM2907 для этой схемы тахометра. Это 8-контактная микросхема. На вывод 1 подаем частотный сигнал на вход зарядовой накачки. На выводе 2 напряжение будет между двумя значениями: (V CC ) — V BE и ¾ (V CC ) — V BE .
На схеме ниже показана конфигурация микросхемы LM2907:
.
Конденсаторы C1 и C2 и резистор R1 имеют определенные значения в соответствии с требованиями схемы. Эти значения можно изучить в техническом паспорте LM2907.
Интерфейс LM2907
Входной сигнал подается на вывод 1, а на вывод 11 подается опорное напряжение. На контакты 8 и 9 подается постоянное напряжение. Инвертирующий вход операционного усилителя соединен с выходом эмиттера.На выводе 5 мы получаем напряжение с низким импедансом, которое пропорционально заданной входной частоте. С вывода 5 и вывода 10 мы получаем выходной сигнал 67 Гц / В. Этот вывод отправляется на АЦП, а затем DSP может его прочитать.
ИЗМЕРЕНИЕ РАЗНИЦЫ ЧАСТОТ
TC9400 — это ИС преобразователя частоты в напряжение и напряжения в частоту. Его основные схемы подключения включают три резистора, два конденсатора и опорное напряжение. Мы можем использовать две микросхемы TC9400 и работать с ними в режиме преобразования частоты в напряжение, чтобы получить измерения разности частот.
Мы используем два преобразователя и получаем V1 и V2 как два отдельных выхода. Единичное усиление инвертирует напряжение V2, поступающее от преобразователя 2 nd F / V. Подключен операционный усилитель, который складывает как напряжения V1, так и инвертированное напряжение –V2. Эта сумма будет пропорциональна фактической разнице частот между F1 и F2. В цепь также включен преобразователь V / F, который дает частотный выход, который снова пропорционален разности частот между F1 и F2. Таким образом, мы получаем измерение разности частот как по частоте, так и по напряжению.На приведенной ниже схеме показана схема измерения разности требований f .
Помимо этих двух приложений, существует множество других применений преобразователей F / V, таких как делители / умножители частоты, частотные декодеры, частотомеры, регуляторы скорости двигателя и т.д., которые можно легко найти на нескольких веб-страницах.
Что такое ЧРП? Рабочая и структурная схема частотно-регулируемого привода
VFD — это сокращенная форма частотно-регулируемого привода, также называемого преобразователем частоты, который претерпел чрезвычайно быстрые изменения, в основном в результате развития микропроцессорных и полупроводниковых устройств и снижения их цен.Однако основные принципы работы преобразователей частоты остаются прежними. Другие названия ЧРП: привод с регулируемой скоростью, привод с регулируемой скоростью, преобразователь частоты, привод переменного тока. Здесь мы обсудим принцип работы и структурную схему ЧРП.
ЧРП можно разделить на четыре основные части:
- Выпрямитель
- Промежуточный контур
- Инвертор
- Цепь управления
Принцип работы ЧРП
Блок-схема частотно-регулируемого привода показана на диаграмме ниже
| Блок-схема частотно-регулируемого привода |
Частотно-регулируемый привод (VFD) — это тип контроллера скорости двигателя, который приводит в действие асинхронный двигатель путем изменения частоты и напряжения, подаваемого на электродвигатель.
Преобразователь частоты (VFD) в основном имеет выпрямитель , промежуточную цепь и инвертор для преобразования обратного постоянного напряжения в переменное, как показано на блок-схеме.
Выпрямитель:
Напряжение питания, подаваемое на выпрямитель, представляет собой трехфазное переменное напряжение или однофазное переменное напряжение с частотой 50 или 60 Гц. Выпрямитель — это схема, преобразующая переменное напряжение в постоянное. Выпрямители, состоящие из диодов и тиристоров, для преобразования переменного напряжения питания в постоянное.
Промежуточный контур:
Промежуточный контур, также называемый шиной постоянного тока или «промежуточным звеном постоянного тока», можно рассматривать как хранилище, из которого двигатель может получать свою энергию через инвертор. Он может быть построен по трем разным принципам в зависимости от выпрямителя и инвертора.
Существует три типа:
- , преобразующий выпрямленное напряжение в постоянный ток.
- один, который стабилизирует или сглаживает пульсации постоянного напряжения и предоставляет его в распоряжение инвертора.
- один, который преобразует постоянное напряжение постоянного тока выпрямителя в переменное напряжение переменного тока.
Инвертор
Инвертор — последняя основная часть привода ЧРП. Инверторные процессы представляют собой заключительный этап с точки зрения генерации выходного переменного напряжения и частоты. Инвертор генерирует переменное напряжение, подаваемое на двигатель.
Цепь управления:
Цепь управления, или плата управления, является четвертым основным компонентом преобразователя частоты и выполняет четыре основные задачи:
- управление полупроводниками преобразователя частоты.
- Обмен данными между преобразователем частоты и периферийными устройствами.
- сбор и передача сообщений о неисправностях.
- выполнение защитных функций для преобразователя частоты и двигателя.
Микропроцессоры увеличили скорость цепи управления, значительно увеличив количество приложений, подходящих для приводов, и уменьшив количество необходимых вычислений. В микропроцессорах процессор интегрирован в преобразователь частоты и всегда может определить оптимальную последовательность импульсов для каждого рабочего состояния.
Ссылка: факты, которые стоит знать о приводах переменного тока Danfoss
Поставщики и ресурсы беспроводной связи RF
О компании RF Wireless World
Веб-сайт RF Wireless World является домом для поставщиков и ресурсов радиочастотной и беспроводной связи. На сайте представлены статьи, руководства, поставщики, терминология, исходный код (VHDL, Verilog, MATLAB, Labview), тестирование и измерения, калькуляторы, новости, книги, загрузки и многое другое.
Сайт RF Wireless World охватывает ресурсы по различным темам, таким как RF, беспроводная связь, vsat, спутник, радар, волоконная оптика, микроволновая печь, wimax, wlan, zigbee, LTE, 5G NR, GSM, GPRS, GPS, WCDMA, UMTS, TDSCDMA, Bluetooth, Lightwave RF, z-wave, Интернет вещей (IoT), M2M, Ethernet и т. Д.Эти ресурсы основаны на стандартах IEEE и 3GPP. В нем также есть академический раздел, который охватывает колледжи и университеты по инженерным дисциплинам и MBA.
Статьи о системах на основе Интернета вещей
Система обнаружения падений для пожилых людей на основе Интернета вещей : В статье рассматривается архитектура системы обнаружения падений, используемой для пожилых людей.
В нем упоминаются преимущества или преимущества системы обнаружения падений Интернета вещей.
Читать дальше➤
Также обратитесь к другим статьям о системах на основе Интернета вещей следующим образом:
• Система очистки туалетов самолета.
• Система измерения столкновений
• Система отслеживания скоропортящихся продуктов и овощей
• Система помощи водителю
• Система умной торговли
• Система мониторинга качества воды.
• Система Smart Grid
• Система умного освещения на базе Zigbee
• Умная парковка на базе Zigbee
• Система умной парковки на основе LoRaWAN
RF Статьи о беспроводной связи
В этом разделе статей представлены статьи о физическом уровне (PHY), уровне MAC, стеке протоколов и сетевой архитектуре на основе WLAN, WiMAX, zigbee, GSM, GPRS, TD-SCDMA, LTE, 5G NR, VSAT, Gigabit Ethernet на основе IEEE / 3GPP и т. Д. .стандарты. Он также охватывает статьи, относящиеся к испытаниям и измерениям, по тестированию на соответствие, используемым для испытаний устройств на соответствие RF / PHY. УКАЗАТЕЛЬ СТАТЬИ ДЛЯ ССЫЛКИ >>.
Физический уровень 5G NR : Обработка физического уровня для канала 5G NR PDSCH и канала 5G NR PUSCH рассмотрена поэтапно. Это описание физического уровня 5G соответствует спецификациям физического уровня 3GPP. Читать дальше➤
Основы повторителей и типы повторителей : В нем объясняются функции различных типов ретрансляторов, используемых в беспроводных технологиях.Читать дальше➤
Основы и типы замирания : В этой статье описаны мелкомасштабные замирания, крупномасштабные замирания, медленные, быстрые и т. Д., Используемые в беспроводной связи. Читать дальше➤
Архитектура сотового телефона 5G : В этой статье рассматривается блок-схема сотового телефона 5G с внутренними модулями 5G. Архитектура сотового телефона. Читать дальше➤
Основы помех и типы помех: В этой статье рассматриваются помехи в соседнем канале, помехи в совмещенном канале, Электромагнитные помехи, ICI, ISI, световые помехи, звуковые помехи и т. Д.Читать дальше➤
5G NR Раздел
В этом разделе рассматриваются функции 5G NR (New Radio), нумерология, диапазоны, архитектура, развертывание, стек протоколов (PHY, MAC, RLC, PDCP, RRC) и т. Д.
5G NR Краткий указатель ссылок >>
• Мини-слот 5G NR
• Часть полосы пропускания 5G NR
• 5G NR CORESET
• Форматы DCI 5G NR
• 5G NR UCI
• Форматы слотов 5G NR
• IE 5G NR RRC
• 5G NR SSB, SS, PBCH
• 5G NR PRACH
• 5G NR PDCCH
• 5G NR PUCCH
• Эталонные сигналы 5G NR
• 5G NR m-последовательность
• Золотая последовательность 5G NR
• 5G NR Zadoff Chu Sequence
• Физический уровень 5G NR
• Уровень MAC 5G NR
• Уровень 5G NR RLC
• Уровень 5G NR PDCP
Учебные пособия по беспроводным технологиям
В этом разделе рассматриваются учебные пособия по радиочастотам и беспроводной связи.Он охватывает учебные пособия по таким темам, как сотовая связь, WLAN (11ac, 11ad), wimax, bluetooth, zigbee, zwave, LTE, DSP, GSM, GPRS, GPS, UMTS, CDMA, UWB, RFID, радар, VSAT, спутник, WLAN, волновод, антенна, фемтосота, тестирование и измерения, IoT и т. Д. См. УКАЗАТЕЛЬ >>
Учебное пособие по 5G — В этом учебном пособии по 5G также рассматриваются следующие подтемы по технологии 5G:
Учебное пособие по основам 5G.
Частотные диапазоны
руководство по миллиметровым волнам
Волновая рама 5G мм
Зондирование волнового канала 5G мм
4G против 5G
Испытательное оборудование 5G
Сетевая архитектура 5G
Сетевые интерфейсы 5G NR
канальное зондирование
Типы каналов
5G FDD против TDD
Разделение сети 5G NR
Что такое 5G NR
Режимы развертывания 5G NR
Что такое 5G TF
В этом руководстве GSM рассматриваются основы GSM, сетевая архитектура, сетевые элементы, системные спецификации, приложения,
Типы пакетов GSM, структура или иерархия кадров GSM, логические каналы, физические каналы,
Физический уровень GSM или обработка речи, вход в сеть мобильного телефона GSM, установка вызова или процедура включения питания,
MO-вызов, MT-вызов, VAMOS, AMR, MSK, модуляция GMSK, физический уровень, стек протоколов, основы работы с мобильным телефоном,
Планирование RF, нисходящая линия связи PS и восходящая линия связи PS.
➤Подробнее.
LTE Tutorial , охватывающий архитектуру системы LTE, охватывающий основы LTE EUTRAN и LTE Evolved Packet Core (EPC). Он обеспечивает связь с обзором системы LTE, радиоинтерфейсом LTE, терминологией LTE, категориями LTE UE, структурой кадра LTE, физическим уровнем LTE, Стек протоколов LTE, каналы LTE (логические, транспортные, физические), пропускная способность LTE, агрегация несущих LTE, передача голоса по LTE, расширенный LTE, Поставщики LTE и LTE vs LTE продвинутые.➤Подробнее.
RF Technology Stuff
Эта страница мира беспроводной радиосвязи описывает пошаговое проектирование преобразователя частоты RF на примере преобразователя RF UP от 70 МГц до диапазона C.
для микрополосковой платы с использованием дискретных радиочастотных компонентов, а именно. Смесители, гетеродин, MMIC, синтезатор, опорный генератор OCXO,
колодки аттенюатора. ➤Подробнее.
➤Проектирование и разработка радиочастотного трансивера
➤Конструкция RF-фильтра
➤Система VSAT
➤Типы и основы микрополосковой печати
➤ОсновыWaveguide
Секция испытаний и измерений
В этом разделе рассматриваются контрольно-измерительные ресурсы, испытательное и измерительное оборудование для тестирования ИУ на основе
Стандарты WLAN, WiMAX, Zigbee, Bluetooth, GSM, UMTS, LTE.УКАЗАТЕЛЬ испытаний и измерений >>
➤Система PXI для T&M.
➤ Генерация и анализ сигналов
➤Измерения слоя PHY
➤Тест устройства на соответствие WiMAX
➤ Тест на соответствие Zigbee
➤ Тест на соответствие LTE UE
➤Тест на соответствие TD-SCDMA
Волоконно-оптические технологии
Оптоволоконный компонент , основы, включая детектор, оптический соединитель, изолятор, циркулятор, переключатели, усилитель,
фильтр, эквалайзер, мультиплексор, разъемы, демультиплексор и т. д.Эти компоненты используются в оптоволоконной связи.
Оптические компоненты INDEX >>
➤Учебное пособие по оптоволоконной связи
➤APS в SDH
➤SONET основы
➤SDH Каркасная конструкция
➤SONET против SDH
Поставщики, производители беспроводных радиочастотных устройств
Сайт RF Wireless World охватывает производителей и поставщиков различных радиочастотных компонентов, систем и подсистем для ярких приложений, см. ИНДЕКС поставщиков >>.
Поставщики радиочастотных компонентов, включая радиочастотный изолятор, радиочастотный циркулятор, радиочастотный смеситель, радиочастотный усилитель, радиочастотный адаптер, радиочастотный разъем, радиочастотный модулятор, радиочастотный трансивер, PLL, VCO, синтезатор, антенну, генератор, делитель мощности, сумматор мощности, фильтр, аттенюатор, диплексор, дуплексер, микросхема резистора, микросхема конденсатора, микросхема индуктивности, ответвитель, оборудование ЭМС, программное обеспечение для проектирования радиочастот, диэлектрический материал, диод и т. д.Производители RF компонентов >>
➤Базовая станция LTE
➤RF Циркулятор
➤RF Изолятор
➤Кристаллический осциллятор
MATLAB, Labview, встроенные исходные коды
Раздел исходного кода RF Wireless World охватывает коды, связанные с языками программирования MATLAB, VHDL, VERILOG и LABVIEW.
Эти коды полезны для новичков в этих языках.
ИНДЕКС ИСХОДНОГО КОДА >>
➤3-8 декодер кода VHDL
➤Код MATLAB для дескремблера
➤32-битный код ALU Verilog
➤T, D, JK, SR триггеры labview коды
* Общая информация о здоровье населения *
Выполните эти пять простых действий, чтобы остановить коронавирус (COVID-19).
СДЕЛАЙТЕ ПЯТЬ
1. РУКИ: часто мойте их.
2. КОЛЕНО: Откашляйтесь.
3. ЛИЦО: Не трогай его
4. НОГИ: держитесь на расстоянии более 3 футов (1 м) друг от друга.
5. ЧУВСТВОВАТЬ: Болен? Оставайся дома
Используйте технологию отслеживания контактов >>, соблюдайте >> рекомендации по социальному дистанцированию и установить систему видеонаблюдения >> чтобы спасти сотни жизней. Использование концепции телемедицины стало очень популярным в таким странам, как США и Китай, остановить распространение COVID-19, поскольку это заразное заболевание.
RF Калькуляторы и преобразователи беспроводной связи
Раздел «Калькуляторы и преобразователи» охватывает ВЧ-калькуляторы, беспроводные калькуляторы, а также преобразователи единиц.
Сюда входят такие беспроводные технологии, как GSM, UMTS, LTE, 5G NR и т. Д.
СПРАВОЧНЫЕ КАЛЬКУЛЯТОРЫ Указатель >>.
➤ Калькулятор пропускной способности 5G NR
➤5G NR ARFCN против преобразования частоты
➤Калькулятор скорости передачи данных LoRa
➤LTE EARFCN для преобразования частоты
➤Калькулятор антенн Яги
➤ Калькулятор времени выборки 5G NR
IoT-Интернет вещей Беспроводные технологии
Раздел IoT охватывает беспроводные технологии Интернета вещей, такие как WLAN, WiMAX, Zigbee, Z-wave, UMTS, LTE, GSM, GPRS, THREAD, EnOcean, LoRa, SIGFOX, WHDI, Ethernet,
6LoWPAN, RF4CE, Bluetooth, Bluetooth Low Power (BLE), NFC, RFID, INSTEON, X10, KNX, ANT +, Wavenis, Dash7, HomePlug и другие.Он также охватывает датчики Интернета вещей, компоненты Интернета вещей и компании Интернета вещей.
См. Главную страницу IoT >> и следующие ссылки.
➤ НИТЬ
➤EnOcean
➤Учебник по LoRa
➤Учебник по SIGFOX
➤WHDI
➤6LoWPAN
➤Zigbee RF4CE
➤NFC
➤Lonworks
➤CEBus
➤UPB
СВЯЗАННЫЕ ЗАПИСИ
RF Wireless Учебники
Различные типы датчиков
Поделиться страницей
Перевести
Форма блок-схемы
— обзор
Описание платформы
На рис. 8-1 в виде блок-схемы показана общая сквозная ориентированная на процесс структура для оценки состояния на основе движения и моделирования формы.Хотя структура довольно проста, она пытается идентифицировать информационный поток (через линии) и функции обработки (через блоки), которые, как предполагается, присутствуют при визуальной обработке динамических изображений человеком.
РИСУНОК 8-1. Платформа для оценки состояния на основе движения и моделирования формы.
Обработка начинается с генерации последовательности изображений: простой монокулярный двухмерный уровень серого I ( x, y, t ), определенный по поверхности изображения ( x, y ) и изменяющийся со временем т. Эту функцию интенсивности можно считать по существу непрерывной в пространстве и времени, с пространственной дискретизацией (пиксельной) или временной дискретизацией (кадр за кадром) или и тем, и другим. В целях обсуждения и более поздних расчетов предполагается как пространственная, так и временная дискретность, что означает, что дискретная последовательность пиксельных кадров изображения доступна для обработки. Немного сложно обосновать временную выборку, но проще для пространственной выборки, учитывая существующую матрицу фоторецепторов сетчатки (например,g., см. Williams and Collier, 1983; Йеллот, 1983). Также обратите внимание, что в этом описании обработки не учитывается потенциальный вклад цвета.
Эта последовательность изображений затем обрабатывается блоком вычисления поля потока для создания соответствующего двумерного «поля потока», векторного поля, которое задает мгновенную угловую скорость линии визирования (LOS) каждой отображаемой точки в поле зрения (FOV). Вычисленное поле подвергается временной дискретизации с новым двумерным кадром поля потока, вычисляемым во время каждого кадра изображения.Вычисленное поле также предполагается пространственно дискретизированным из-за пикселизации изображения, так что поток вычисляется только для каждого пикселя. Фактически, вычисленное поле обеспечивает временную и пространственную версию непрерывного поля потока, связанного с относительным движением наблюдателя и сцены. Поле потока может быть задано в плоскости датчика изображения как набор двумерных векторов в плоскости (традиционный подход) или как набор трехмерных угловых векторов скорости LOS, определенных в произвольной системе координат, привязанной к наблюдателю.Эта последняя спецификация позволяет определить «оптический поток», который не зависит от ориентации плоскости изображения и поля зрения в традициях Гибсона.
Результирующее поле потока затем обрабатывается блоком оценки времени состояния для генерации в каждый момент времени кадра оценок основных состояний наблюдателя, которые могут быть выведены из входной последовательности изображений: мгновенная точка прицеливания, угловая скорость и двумерное векторное поле «времен удара», определяющее направления и время прохождения к отображаемым точкам в поле зрения.Поскольку количество входных векторов поля потока, вероятно, будет большим (примерно равным количеству пикселей изображения) по сравнению с количеством неизвестных состояний наблюдателя (два в заголовке и три в угловой скорости), задача оценки состояния поступательного вращения сверхдетерминирован. Подход к оценке по методу наименьших квадратов может предоставить простые средства для работы с этой ситуацией, одновременно минимизируя влияние распространения ошибки оценки поля потока. Полученные оценки точки прицеливания и угловой скорости затем можно использовать для вычисления векторного поля времени удара, которое определяет центрированную на наблюдателя, пространственно дискретизированную и масштабированную по скорости реплику изображенной сцены.Фактически, поле времени удара обеспечивает масштабированную трехмерную «карту глубины» изображенной сцены.
Результирующий набор векторов времени удара затем может быть обработан блоком моделирования формы объекта, чтобы выбрать «наиболее подходящую» модель объекта и сгенерировать соответствующие оценки параметров для выбранной модели. Одним из способов достижения этого является другой процесс оценки методом наименьших квадратов, в котором объектная модель фиксированной формы корректируется с помощью внутренних параметрических спецификаторов и с помощью внешнего масштабирования, поворота и перемещения, чтобы получить наилучшее соответствие расчетному времени воздействия. вектор, установленный по всему полю поля зрения изображенной сцены.Этот тип обработки имеет потенциал для значительного сжатия данных, что дает небольшой набор параметров объекта из большого количества векторов времени воздействия. Последующая итерация по внутреннему словарю общих форм объектов может затем обеспечить оптимизированное моделирование формы по диапазону объектов словаря, известному наблюдателю.
% PDF-1.5 % 5632 0 obj> эндобдж xref 5632 89 0000000016 00000 н. 0000003754 00000 н. 0000004077 00000 н. 0000002121 00000 п. 0000004122 00000 н. 0000004528 00000 н. 0000004556 00000 н. 0000004706 00000 н. 0000005067 00000 н. 0000005407 00000 н. 0000005794 00000 н. 0000006222 00000 п. 0000006613 00000 н. 0000006816 00000 н. 0000006894 00000 н. 0000007420 00000 н. 0000013179 00000 п. 0000013782 00000 п. 0000019869 00000 п. 0000020258 00000 п. 0000021188 00000 п. 0000021729 00000 п. 0000024622 00000 п. 0000024660 00000 п. 0000025416 00000 п. 0000028754 00000 п. 0000029176 00000 п. 0000029640 00000 п. 0000030802 00000 п. 0000031432 00000 п. 0000040425 00000 п. 0000043726 00000 п. 0000046449 00000 п. 0000046673 00000 п. 0000046896 00000 н. 0000049810 00000 п. 0000052693 00000 п. 0000055500 00000 п. 0000056060 00000 п. 0000056830 00000 н. 0000057147 00000 п. 0000057533 00000 п. 0000062705 00000 п. 0000063197 00000 п. 0000063426 00000 п. 0000066405 00000 п. 0000069652 00000 п. 0000072323 00000 п. 0000072379 00000 п. 0000072439 00000 п. 0000072518 00000 п. 0000072637 00000 п. 0000072778 00000 п. 0000072958 00000 п. 0000073066 00000 п. 0000073211 00000 п. 0000073400 00000 п.
