Что такое драйвер шагового двигателя. Как работает драйвер шагового двигателя. Какие бывают типы драйверов шаговых двигателей. Как выбрать подходящий драйвер для шагового двигателя. Как собрать простой драйвер шагового двигателя своими руками.
Что такое драйвер шагового двигателя и зачем он нужен
Драйвер шагового двигателя — это электронное устройство, которое управляет работой шагового двигателя. Его основные функции:
- Преобразование управляющих сигналов в последовательность импульсов тока для обмоток двигателя
- Коммутация обмоток двигателя в нужной последовательности
- Регулирование тока в обмотках
- Защита двигателя от перегрузок
Без драйвера невозможно корректное управление шаговым двигателем. Драйвер обеспечивает точность позиционирования, плавность хода и оптимальный крутящий момент.
Принцип работы драйвера шагового двигателя
Работа драйвера шагового двигателя основана на следующих принципах:
- Получение управляющих сигналов от контроллера (направление вращения, скорость, режим работы)
- Формирование последовательности импульсов тока для обмоток двигателя
- Коммутация обмоток с помощью силовых ключей (как правило, транзисторов)
- Регулирование тока в обмотках с помощью ШИМ или линейного метода
- Контроль параметров работы и защита от аварийных режимов
За счет точного управления током в обмотках драйвер обеспечивает плавное и точное перемещение ротора двигателя.
Основные типы драйверов шаговых двигателей
Драйверы шаговых двигателей можно классифицировать по нескольким признакам:
По способу управления током:
- Драйверы с постоянным напряжением — простые, но неэффективные
- Драйверы с широтно-импульсной модуляцией (ШИМ) — наиболее распространенный тип
- Драйверы с линейным регулированием тока — точные, но с низким КПД
По типу выходного каскада:
- Биполярные — управляют током в обеих полярностях
- Униполярные — управляют током только одной полярности
По наличию микрошагового режима:
- Драйверы с полношаговым режимом
- Драйверы с микрошаговым режимом — обеспечивают более плавное вращение
Выбор типа драйвера зависит от конкретной задачи и характеристик используемого двигателя.
Как выбрать подходящий драйвер для шагового двигателя
При выборе драйвера для шагового двигателя нужно учитывать следующие параметры:
- Рабочее напряжение — должно соответствовать напряжению питания двигателя
- Максимальный ток фазы — не менее номинального тока двигателя
- Тип двигателя — биполярный или униполярный
- Наличие микрошагового режима — если требуется плавное вращение
- Интерфейс управления — совместимость с используемым контроллером
- Защитные функции — от перегрузки, перегрева и т.д.
Также важно учитывать условия эксплуатации — температуру, влажность, вибрации. Для ответственных применений рекомендуется выбирать драйверы с запасом по току и напряжению.
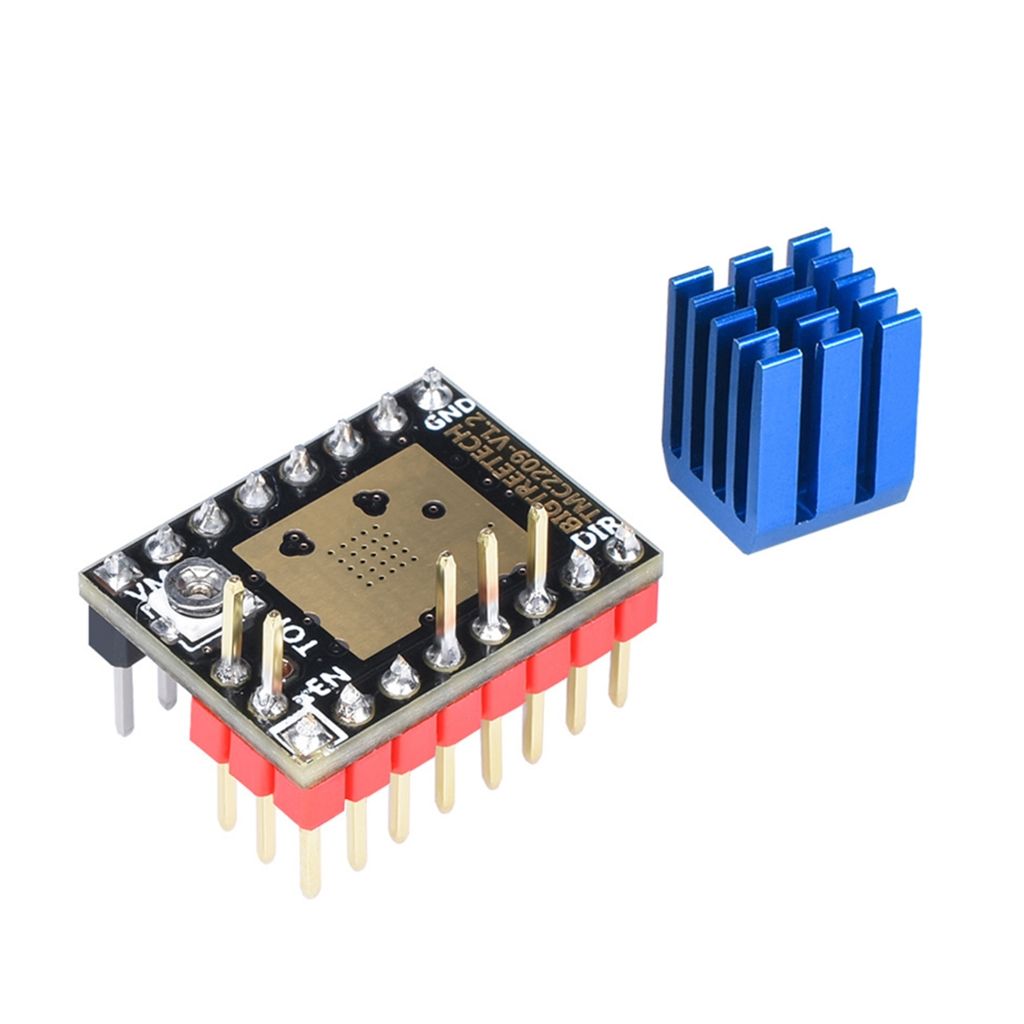
Схема простого драйвера шагового двигателя своими руками
Для управления небольшим шаговым двигателем можно собрать простой драйвер на дискретных компонентах. Вот пример такой схемы:
- Силовая часть — четыре транзистора MOSFET в H-мостовой конфигурации
- Драйверы затворов транзисторов — микросхемы IR2104
- Логическая часть — микроконтроллер ATmega328
- Источник питания — 12В для силовой части, 5В для логики
Микроконтроллер формирует управляющие сигналы для драйверов затворов, которые в свою очередь управляют силовыми транзисторами. Это обеспечивает коммутацию обмоток двигателя в нужной последовательности.
Такой простой драйвер подойдет для маломощных двигателей до 1-2А на фазу. Для более мощных двигателей рекомендуется использовать готовые модули драйверов.
Популярные модели драйверов шаговых двигателей
На рынке представлено множество моделей драйверов от разных производителей. Вот несколько популярных вариантов:
- A4988 — недорогой драйвер для небольших двигателей, поддерживает микрошаг до 1/16
- DRV8825 — драйвер среднего класса с током до 2.5А на фазу и микрошагом до 1/32
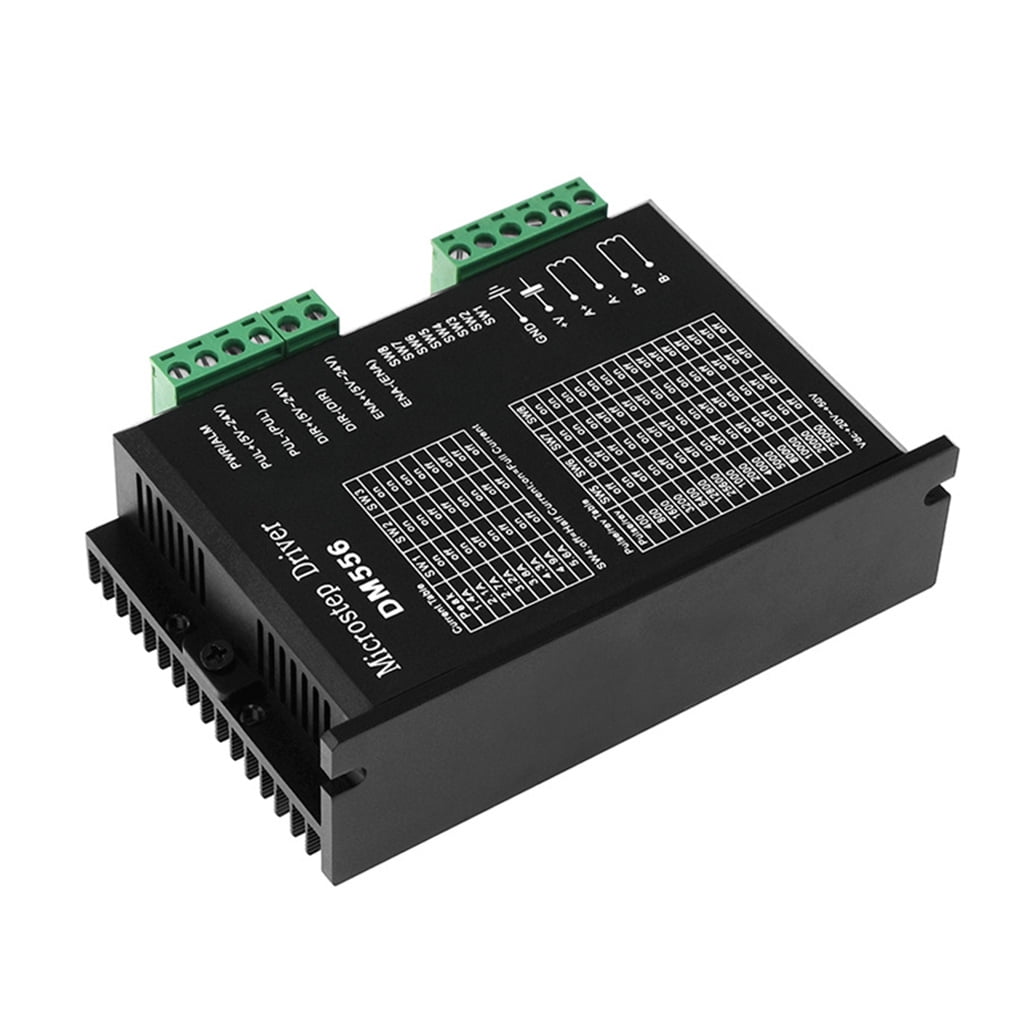
- TB6600 — мощный драйвер с током до 4А на фазу, подходит для крупных двигателей
- TMC2208 — «тихий» драйвер с режимом интерполяции микрошага
При выборе конкретной модели нужно внимательно изучить ее характеристики и убедиться в совместимости с вашим двигателем и системой управления.
Настройка и подключение драйвера шагового двигателя
Правильная настройка драйвера критически важна для оптимальной работы шагового двигателя. Основные этапы настройки:
- Установка рабочего тока — обычно 70-80% от номинального тока двигателя
- Выбор режима микрошага — в зависимости от требуемой точности позиционирования
- Настройка времени нарастания тока — влияет на плавность работы на высоких скоростях
- Конфигурирование защитных функций — от перегрузки, перегрева и т.д.
При подключении драйвера важно соблюдать правильную полярность питания и сигналов управления. Обмотки двигателя подключаются согласно его схеме и типу (биполярный или униполярный).
Тщательная настройка драйвера позволяет добиться максимальной производительности и надежности системы управления шаговым двигателем.
Диагностика и устранение неисправностей драйвера шагового двигателя
При эксплуатации драйвера шагового двигателя могут возникать различные проблемы. Вот типичные симптомы неисправностей и способы их устранения:

- Двигатель не вращается:
- Проверить питание драйвера и двигателя
- Убедиться в правильности подключения обмоток
- Проверить наличие управляющих сигналов
- Двигатель вращается рывками:
- Настроить ток фазы и время нарастания тока
- Проверить качество управляющих сигналов
- Увеличить дробность микрошага
- Повышенный нагрев драйвера:
- Уменьшить ток фазы
- Улучшить охлаждение драйвера
- Проверить правильность подключения
При возникновении сложных неисправностей рекомендуется обратиться к документации производителя или к специалистам по обслуживанию электроприводов.
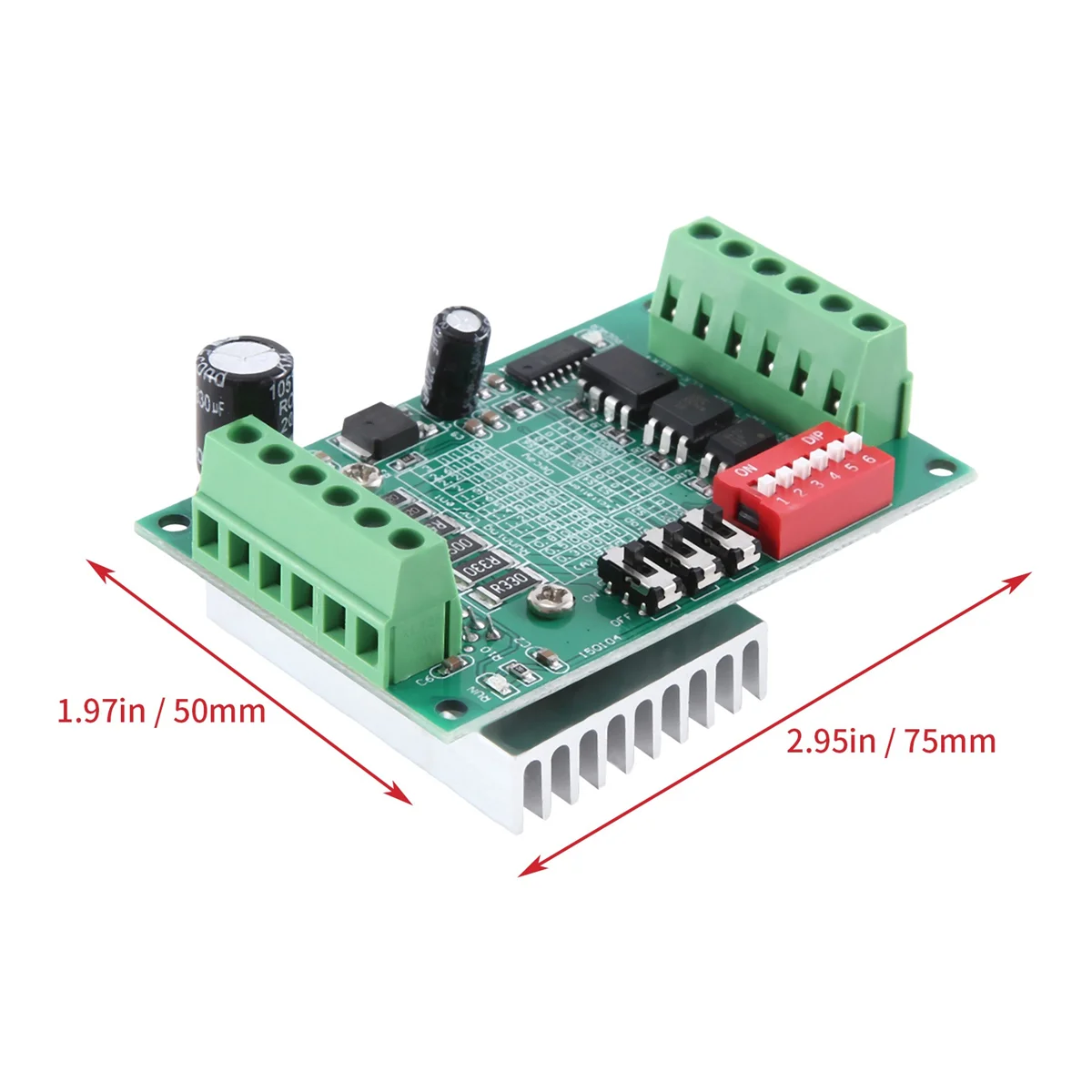
Простой драйвер шагового двигателя
Схема драйвера шагового двигателя
Схема драйвера шагового двигателя не содержит дорогих деталей и программируемых контроллеров. Работа может регулироваться в широком диапазоне с помощью потенциометра PR1. Есть изменение направления вращения двигателя. Катушки шагового двигателя переключаются с помощью четырех МОП-транзисторов T1-T4. Применение в блоке транзисторов большой мощности типа BUZ10 позволит подключить двигатели даже с очень большим током.
Что такое шаговый двигатель?
Шаговый двигатель представляет собой электрическую машину, предназначенную для преобразования электрической энергии сети в механическую энергию. Конструктивно состоит из обмоток статора и магнитомягкого или магнитотвердого ротора. Отличительной особенностью шагового двигателя является дискретное вращение, при котором заданному числу импульсов соответствует определенное число совершаемых шагов. Наибольшее применение такие устройства получили в станках с ЧПУ, робототехнике, устройствах хранения и считывания информации.
В отличии от других типов машин шаговый двигатель совершает вращение не непрерывно, а шагами, от чего и происходит название устройства. Каждый такой шаг составляет лишь часть от его полного оборота. Количество необходимых шагов для полного вращения вала будет отличаться, в зависимости от схемы соединения, марки двигателя и способа управления.
Преимущества и недостатки шагового электродвигателя
К преимуществам эксплуатации шагового двигателя можно отнести:
- В шаговых электродвигателях угол поворота соответствует числу поданных электрических сигналов, при этом, после остановки вращения сохраняется полный момент и фиксация;
- Точное позиционирование – обеспечивает 3 – 5% от установленного шага, которая не накапливается от шага к шагу;
- Обеспечивает высокую скорость старта, реверса, остановки;
- Отличается высокой надежностью за счет отсутствия трущихся компонентов для токосъема, в отличии от коллекторных двигателей;
- Для позиционирования шаговому двигателю не требуется обратной связи;
- Может выдавать низкие обороты для непосредственно подведенной нагрузки без каких-либо редукторов;
- Сравнительно меньшая стоимость относительно тех же сервоприводов;
- Обеспечивается широкий диапазон управления скоростью оборотов вала за счет изменения частоты электрических импульсов.

Особенности схемы и детали
- управление четырехфазным шаговым двигателем
- плавная регулировка скорости вращения в пределах всего диапазона
- изменение направления вращения мотора
- возможная остановка двигателя
- блок питания 12 В постоянного тока
Детали — IC1: 4070, IC2: 4093, IC3: 4027, T1-T4: BUZ10, BUZ11
Блок драйвер шагового двигателя собран на печатной плате, показанной на рисунке. Монтируем, как правило, начиная с припайки резисторов и панелек для интегральных микросхем, а под конец электролитические конденсаторы и транзисторы большой мощности.
Блок, собранный из проверенных компонентов, не требует настройки и запускается сразу после подачи питания. Со значениями элементов, указанными на схеме, позволяет работать двигателю 5,25” и выполняет изменение скорости вращения в интервале от 40 об./мин. до 5 об./мин.
Полезное: Схема усилителя звука с предусилителем, блоком питания и реле защиты АС
Контроллер шагового двигателя
Контроллер шагового двигателя в радиолюбительской литературе опубликовано много описаний устройств управления шаговыми двигателями, этот контроллер шагового двигателя, имеющее ряд отличий и достоинств. Предлагаемый контроллер биполярного шагового двигателя построен из небольшого числа легкодоступных дешёвых деталей, имеет маленький потребляемый ток и может быть адаптирован для применения в различных устройствах.
Предлагаемый контроллер биполярного шагового двигателя построен из небольшого числа легкодоступных дешёвых деталей, имеет маленький потребляемый ток и может быть адаптирован для применения в различных устройствах.
Применение двухполярного питания выходных электронных ключей дало возможность вдвое уменьшить их число и получить режим остановки двигателя, в котором через его обмотки не течёт ток. Управляющая программа обеспечивает фиксированную длительность рабочих импульсов при любой частоте шагов, что избавило ключевые транзисторы от излишнего нагрева. Использование для управления ключами оптронов даёт развязку по питанию, возможность независимого питания узла управления и ключей, коммутирующих обмотки двигателя.
Схема контроллер шагового двигателя изображена на рисунке. Узел управления построен на микроконтроллере DD1 (PIC16F84A-04/P). Назначение кнопок управления следующее: SB1 — вращение по часовой стрелке; SB2 — вращение против часовой стрелки; SB3 — увеличение частоты шагов; SB4 — уменьшение частоты шагов; SB5 — стоп. Значения напряжения питания шагового двигателя +11шд и —11шд зависят от его типа, но не должны по абсолютному значению превышать 27 В — половины допустимого для фототранзисторов применённых оптронов напряжения коллектор—эмиттер. Чертёж печатной платы контроллер шагового двигателя и размещение деталей на ней показаны на рисунке размеры платы 76×53.
Значения напряжения питания шагового двигателя +11шд и —11шд зависят от его типа, но не должны по абсолютному значению превышать 27 В — половины допустимого для фототранзисторов применённых оптронов напряжения коллектор—эмиттер. Чертёж печатной платы контроллер шагового двигателя и размещение деталей на ней показаны на рисунке размеры платы 76×53.
Для микроконтроллера на плате устанавливают панель, в которую его вставляют уже запрограммированным. Исходный текст программы микроконтроллера содержит все необходимые комментарии, и при необходимости её можно изменять, например, ввести полушаговый режим управления двигателем или, используя свободные порты микроконтроллера, добавить конечные выключатели для ограничения сектора вращения, или задавать нужное число шагов. Стоит отметить, что необходимая очерёдность открывания транзисторов VT1—VT4 реализована в программе с учётом трассировки печатной платы.
Правильно собранный контроллер шагового двигателя не требует налаживания. В нём в качестве VT1—VT4 можно использовать любые комплементарные пары транзисторов средней мощности, например, серий КТ814 и КТ815, КТ816 и КТ817, КТ972 и КТ973 или аналогичные импортные. Подходящие транзисторные оптроны можно найти в любом импульсном блоке питания, где их широко используют. Прошивку и печатную плату берем тут
В нём в качестве VT1—VT4 можно использовать любые комплементарные пары транзисторов средней мощности, например, серий КТ814 и КТ815, КТ816 и КТ817, КТ972 и КТ973 или аналогичные импортные. Подходящие транзисторные оптроны можно найти в любом импульсном блоке питания, где их широко используют. Прошивку и печатную плату берем тут
Биполярный контроллер шаговых двигателей
Схема представляет собой дешевую, и прежде всего легко собираемую альтернативу доступным микропроцессорным биполярным контроллерам шаговых двигателей. Рекомендуется там, где точность управления играет меньшую роль, чем цена и надежность.
Принципиальную схему можно разделить на следующие блоки:
- последовательный чип, генерирующий битовые строки,
- локальный генератор тактового сигнала,
- схема управления питанием катушек,
- выходные буферы Н-моста,
- схемы защиты входных сигналов управления.
Контроллер должен питаться постоянным напряжением, хорошо отфильтрованным, желательно стабилизированным.
Теперь пару слов про H-мосты, которые будут работать с этим драйвером. Они должны принимать на своих входах все возможные логические состояния (00, 01, 10, 11), без риска какого-либо повреждения. Просто в некоторых конфигурациях мостов построенных из дискретных элементов, запрещается одновременное включение двух входов — их естественно нельзя использовать с этим контроллером. Мосты выполненные в виде интегральных микросхем (например L293, L298), устойчивы к этому.
И в завершение третий вариант контроллера, на микросхемах STK672-440, имеющий все необходимые защиты и функции смотрите по ссылке.
Контроллер для проверки шагового двигателя
Доброго здоровья всем. За последние годы у меня скопилась куча шаговых двигателей, да все руки до них не доходили, а ведь шаговик штука очень интересная и нужная. Да, еще в Интернете прочитал, что много нашего брата мучаются с запуском таких двигунов, вот и решил сделать контроллер для проверки наиболее часто встречающихся шаговых двигателей.
Шаговые двигатели достаточно распространены в устройствах, в которых необходимо добиться точного перемещения механизмов. Существует очень много типов шаговых двигателей, но самыми простыми в плане управления являются 2-х фазные униполярные двигатели. Этот тип двигателей имеет две независимые (см. Рис.1)обмотки с выводами от середины. Их можно встретить в таких аппаратах, как принтер, копир, дисковод и т.д.
Схема управления шаговым двигателем представлена на рисунке 2.
Сперва хотел разработать схему на жесткой логике, но когда определился с функциями, которые она должна выполнять, пришло твердое решение использовать для этих целей микроконтроллер. И так, что можно определить с помощью данного блока управления.
1. Можно определить количество шагов. 2. Определить один из двух алгоритмов работы двигателя. 3. Опробовать работу двигателя в полушаговом режиме. 4. Можно опробовать работу в полношаговом режиме. Еще раз повторюсь, что разновидностей шаговиков много и не для всех подойдет данный контроллер.
Программа управления состоит из пяти подпрограмм, которые переключаются кнопкой BS3 – «Выбор программ». Номер выбранной подпрограммы отображается тремя светодиодами в двоичной системе счисления. При первом включении должен засветиться светодиод HL1, индицирующий о том, что включена первая подпрограмма работы шагового двигателя в полушаговом режиме. Запуск двигателя осуществляется кнопками «Право» и «Лево». Право – двигатель должен крутиться по часовой стрелке, лево – против часовой, но направление вращения зависит еще и от того, как вы скоммутируете обмотки двигателя. Возможно, придется эксперементировать. На скриншоте 1 (передняя панель виртуального осциллографа программы Proteus) можно наблюдать импульсную последовательность и коды полушагов работы двигателя. Некоторые из шаговиков по этому алгоритму у меня не работали.
Подпрограмма №2 – светится второй светодиод. В этой подпрограмме двигатель будет работать по полношаговому алгоритму, показанному на скрине 2.
Подпрограмма №3 – светятся первый и второй светодиоды.
 В этой подпрограмме двигатель будет работать по полношаговому алгоритму, показанному на скрине 3.
В этой подпрограмме двигатель будет работать по полношаговому алгоритму, показанному на скрине 3.Подпрограмма №4 – светится третий светодиод. Данная подпрограмма обеспечивает один шаг двигателя при каждом нажатии на кнопку «Право». Кнопка «Лево» в данном случае не задействована. Короче говоря, нажимая каждый раз на кнопку, можно сосчитать количество шагов за один оборот проверяемого двигателя. Алгоритм работы двигателя в данной подпрограмме соответствует алгоритму на скрине 2.
Подпрограмма №5 – светятся первый и третий светодиоды. В этой подпрограмме творится тоже самое, только алгоритм работы двигателя в данной подпрограмме соответствует алгоритму на скрине 3.
Общий вид платы — на фото.
Файл прошивки, схему и рисунок печатной платы можно скачать здесь. Успехов всем. До свидания. К.В.Ю.
Обсудить эту статью на — форуме «Радиоэлектроника, вопросы и ответы».
Просмотров:24 198
Метки: Шаговые двигатели
Драйвер шагового двигателя
Управление шаговым двигателем невозможно без применения драйвера — электронного устройства, обеспечивающего его работу с учетом сигналов управления.
Иными словами, это элемент схемы, предназначенный для управления обмотками мотора путем подачи цифровых сигналов.
Благодаря такой конструкции, обеспечивается вращение ротора ШД. Драйвер работает после подключения источника питания, обмоток самого устройства и источника управляющего сигнала.
В зависимости от вида драйвера могут решать ряд дополнительных задач:
- контроль перегрузки по току, повышения напряжения и переполюсовки;
- автоматическое снижение тока в случае длительного простоя;
- защита от эффекта обратной ЭДС;
- построение простых схем перемещения без использования компьютера (встроенный генератор частоты) и т. д.
Конструктивно драйвер состоит из контроллера и силовой части. Первая составляющая создана на базе микропроцессора и может программироваться, а вторая представляет собой полупроводниковый усилитель мощности, цель которого состоит в преобразовании подаваемых на фазы токовых импульсов.
Драйверы условно делятся на три категории (по типу доставки тока):
- Постоянного напряжения.
 Подает высокий потенциал по очереди на каждую из обмоток. Суммарный ток зависит от сопротивления последних, а на больших оборотах — от индуктивности. Такие драйверы имеют низкую эффективность и могут применяться только на небольших скоростях.
Подает высокий потенциал по очереди на каждую из обмоток. Суммарный ток зависит от сопротивления последних, а на больших оборотах — от индуктивности. Такие драйверы имеют низкую эффективность и могут применяться только на небольших скоростях. - Двухуровневые. Сначала подается напряжение, благодаря которому ток в обмотке поднимается до нужной величины, после чего источник потенциала выключается, а ток поддерживается источником низкого напряжения. Такие драйверы имеют более высокую эффективность и уменьшают нагрев моторов. Работают в режиме полного и половины шага.
- ШИМ-типа. Пользуются наибольшим спросом, благодаря надежности и удобству управления. Их особенность состоит в подаче на обмотку ШИМ-сигнала высокого напряжения, отсекаемого небольшим током. Такие драйверы отличаются интеллектуальностью и возможностью программирования.
Кроме того, драйверы шаговых двигателей отличаются по типу. Они бывают аналоговыми, цифровыми и с энкодером. Поговорим о них более подробно.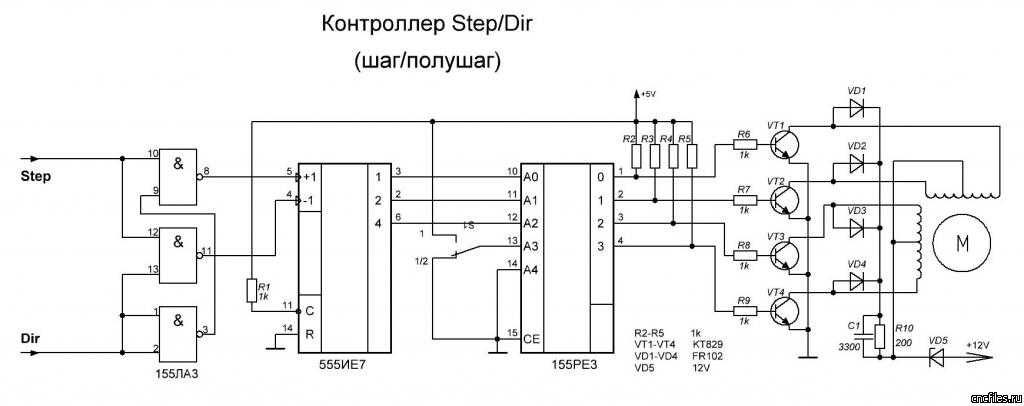
Аналоговые
Отличаются высокой надежностью и эффективностью, благодаря сравнительно небольшому потреблению тока.
Задача таких устройств состоит в попеременной подаче импульса в разные обмотки статора с учетом заранее заданной программы. При этом обеспечивается определенный угол и направление вращения.
Плюсы аналоговых драйверов:
- низкая цена;
- защита от КЗ и высокого напряжения;
- автоматическое снижение тока;
- отсутствие риска случайного перегрева.
К основным моделям можно отнести:
- CW-230. Предназначен для управления биполярным шаговым агрегатом на две фазы с максимальным током до 3 А. Мотор может управляться в режиме до 1/64 шага. Управление силовым узлом осуществляется с помощью трех сигналов, подаваемых на дифференциальные входы. Плюсы: низкая цена, изоляция входных сигналов, защита от ошибочного подключения, КЗ и высокого напряжения.
- QJ Предназначен для управления биполярным ШД с двумя фазами и предельным током до 4,5 А.
 Доступно управление в режиме до 1/256 шага. Для управления применяется три сигнала, которые подают на входы PUL, DIF и ENA. Благодаря такой особенности, можно подключиться к LPT-порту ПК и успешно работать с программой ЧПУ станков. Плюсы: полный набор защит, автоматическое снижение тока, изолированные входные сигналы, доступная стоимость.
Доступно управление в режиме до 1/256 шага. Для управления применяется три сигнала, которые подают на входы PUL, DIF и ENA. Благодаря такой особенности, можно подключиться к LPT-порту ПК и успешно работать с программой ЧПУ станков. Плюсы: полный набор защит, автоматическое снижение тока, изолированные входные сигналы, доступная стоимость. - QJ6060AC — предназначен для управления 2-фазным шаговым двигателем. Наибольший параметр тока — до 6 Ампер на каждую из фаз. Доступно управление с 1/128 шага. Для управления применяется три сигнала (как в рассмотренной выше модели). Доступно подключение ШД для ЧПУ станков и ряда плоттеров.
Цифровые
Это более современные модели, работающие на базе цифрового управляющего сигнала. В основе лежит 32-разрядный процессор, повышающий характеристики применяемого оборудования.
ШД, работающие с таким драйвером, выделяет низкий уровень вибрации, минимальный нагрев, небольшой уровень шума.
Преимущества цифровых устройств:
- автоматическая настройка;
- высокая производительность;
- защита от перегруза;
- больший набор функций;
- максимальное деление по шагам;
- автоматическое уменьшение напряжения на ХХ и т.
 д.
д.
Популярные модели:
- 2DM542 — 2-фазное устройство, в основе которого лежит 32-битный процессор. Отличается привычным способом изменения тока, гарантирует высокий уровень производительности, оптимальный момент вращения, повышенное ускорение и стабильность. Благодаря улучшенным алгоритмам, гарантируется стабильность к изменениям нагрузки, оптимальное ускорение и необходимый момент вращения.
- 2DM Как и рассмотренная выше модель, этот цифровой драйвер имеет 2-фазное исполнение и построен на 32-битном CPU. Его применение позволяет добиться большей плавности работы мотора, улучшить его производительность и момент вращения, добиться оптимального ускорения и стабильности к изменениям нагрузки. В модели предусмотрены встроенные устройства для самостоятельного тестирования и автонастройки.
- Leadshine DM-805-AI. Особенность драйвера состоит в высокой степени плавности системы с гарантией оптимального момента вращения и стабильности работы устройства.
 Благодаря встроенной технологии самостоятельного тестирования и автоматической настройки, драйвер эффективно взаимодействует с разными типами моторов. При этом сам двигатель работает плавнее, меньше перегревается и почти не шумит. Для удобства поддерживается несколько рабочих режимов, имеется три встроенных потенциометра, позволяющие установить параметры разгона, скорости и торможения. Драйвер применяется для агрегатов типа NEMA-17-34 различных модификаций.
Благодаря встроенной технологии самостоятельного тестирования и автоматической настройки, драйвер эффективно взаимодействует с разными типами моторов. При этом сам двигатель работает плавнее, меньше перегревается и почти не шумит. Для удобства поддерживается несколько рабочих режимов, имеется три встроенных потенциометра, позволяющие установить параметры разгона, скорости и торможения. Драйвер применяется для агрегатов типа NEMA-17-34 различных модификаций.
С энкодером
Такие драйвера представляют собой устройства, построенные на цифровом принципе и имеющие высокую реакцию. Применяются в качестве замены для более сложных систем управления, нуждающихся в высокой точности.
К особенностям относится:
- наличие обратной связи;
- поддержка момента и скорости вращения;
- гарантирование плавности передвижения и небольшого уровня шума;
- защита от токовых и иных перегрузок;
- уменьшение нагрева мотора и обеспечение его нормальной работы.

При использовании такого драйвера можно не бояться задержек в работе при сохранении максимального быстродействия.
К популярным моделям можно отнести:
- 2HSS86H — 2-фазный цифровой серводрайвер, совмещающий функции шагового и сервопривода. Применяется для оборудования, нуждающегося в высоком моменте вращения, быстродействии, рентабельности и устойчивости при 0-ой скорости. Его применение гарантирует плавность и минимальную шумность шагового мотора.
- CWDS860H — устройство нового поколения, совмещающее лучшие качества серво- и шаговых устройств. Гарантирует снижение вибрации, уменьшение шумности и большую точность позиционирования. Благодаря равномерности работы и высокой скорости реакции эта модель подходит для программ, нуждающихся в быстром перемещении на небольшие расстояния и требующие плавности в работе. Особенности модели: устойчивость при 0-ой скорости, быстродействие и рентабельность.
- HBS57 — альтернативный вариант для программ, нуждающихся в высокой производительности и повышенной надежности (там, где применяется сервопривод).
 В состав системы входит 3-фазный шаговый и цифровой быстродействующий драйвер. Устройство отличается высокой скоростью реакции и отсутствием рыков. Двигатель меньше греется, имеет меньший уровень шума и работает без задержек.
В состав системы входит 3-фазный шаговый и цифровой быстродействующий драйвер. Устройство отличается высокой скоростью реакции и отсутствием рыков. Двигатель меньше греется, имеет меньший уровень шума и работает без задержек.
ДРАЙВЕР 2HSS86H
Кроме рассмотренных выше, бывают и другие типы драйверов, но они применяются реже.
Управление шаговым двигателем
Как уже отмечалось, выделяется несколько способов управления шаговым агрегатом. Каждый из вариантов имеет ряд особенностей в вопросе подачи сигналов на имеющиеся полюса.
К главным методам управления относится:
- Волновой. Особенность состоит в подаче возбуждения к одной обмотке. Именно к ней и подтягиваются роторные полюса. При этом ШД не способен выдержать большую нагрузку, ведь выдает лишь часть момента.
- Полношаговый. Суть такого управления в одновременном возбуждении двух фаз, что гарантирует наибольший момент при параллельной схеме подключения. Если соединить обмотки последовательно, будет создаваться максимальный ток и напряжение.

- Полушаговый. Комбинация двух рассмотренных выше режимов. При реализации такой схемы в шаговом моторе происходит поочередная подача напряжения. Сначала оно направляется в одну катушку, а потом сразу в обе. Как результат, гарантируется лучшая фиксация на наибольших скоростях и максимальным числом шагов.
Чтобы преодолеть инерцию и достичь более мягкого управления, применяется микрошаговая структура. Особенность — задание синусоиды с помощью многочисленной подачи импульсов.
Как результат, силы взаимодействия магнитных цепей более плавно меняются, и обеспечивается мягкое перемещение между полюсами. В итоге уменьшаются рывки во время работы.
По наличию контроллера шаговые двигатели делятся на два типа:
- Безконтроллерные. Используется Н-мостовая схема с возможностью менять полярность для реверса устройства. В зависимости от ситуации делается на микросхемном или транзисторном принципе. Сначала напряжение подается на мост, а, благодаря параллельно размещенным переключателям, осуществляется движение тока через обмотки мотора.
 Как результат, удается наладить вращение в любом направлении.
Как результат, удается наладить вращение в любом направлении. - Контроллерные. Преимущество исполнения стоит в возможности управления шаговым агрегатом в разных режимах. В роли ключевого элемента выступает электронный блок, который выдает группу сигналов и задает последовательность их передачи. Во избежание повреждения при КЗ или другой аварии на моторе каждый вывод защищен с помощью диода, не пропускающего импульс в обратном направлении.
К наиболее популярным относится две схемы управления — от контроллера с дифференциальным входом и выходом вида «открытый коллектор».
Первый вариант отличается надежной защитой от помех с подключением прямого / инверсного сигнала к подходящим полюсам. Здесь обязательно экранирование провода, по которому подается сигнал. Это оптимальное решение для маломощных устройств.
Вторая схема отличается соединением «плюсовых» выходов контроллера, подключенных к «плюсовому» выводу. При подаче напряжения свыше 9 В требуется добавление сопротивления для снижения тока. Кроме того, с помощью такого решения можно задать нужное число шагов в определенном скоростном режиме и задать ускорение.
Кроме того, с помощью такого решения можно задать нужное число шагов в определенном скоростном режиме и задать ускорение.
Как «крутить» шаговый двигатель без микроконтроллера
Шаговые двигатели полезны при управлении ими программируемым устройством но тем не менее могут возникать случаи когда в сложном управлении шаговым двигателем нет необходимости и нужен, всего лишь, большой крутящий момент и/или низкие обороты. Схема простого контроллера шагового двигателя приведена на рисунке:
Рисунок 1 — Контроллер шагового двигателя
Контроллер состоит из мультивибратора на таймере 555, микросхемы десятичного счётчика 4022 (CD4022, HEF4022 и т.д.) и необязательных светодиодов с резистором для визуализации и наглядности, резистор один т.к. больше одного светодиода в данной схеме светиться не может. Счётчик десятичный т.е. при подаче на его тактовый вход (CLOCK (вывод 14)) импульсов напряжения на выводе соответствующему выходу номер которого совпадает с количеством поданных импульсов, после сброса, появляется напряжение уровня логической единицы, на всех остальных выводах выходов, при этом, устанавливаются напряжения уровня логического нуля.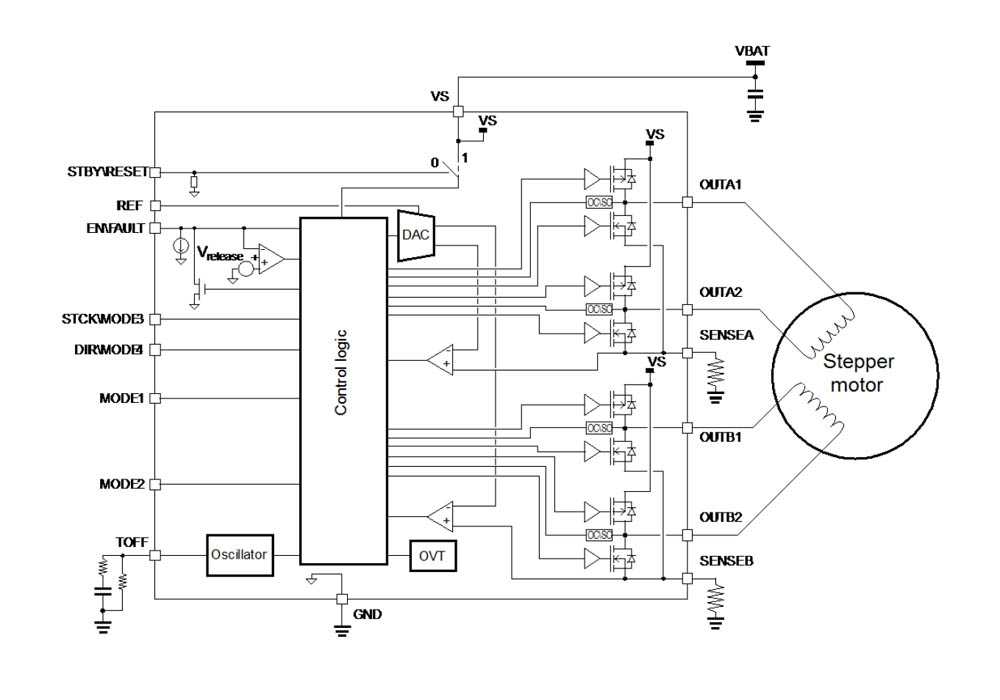

Рисунок 2 — Драйвер на транзисторах
Шаговый двигатель подключается к драйверу
Рисунок 3 — Шаговый двигатель
Для возможности реверса двигателя можно поставить переключатели (или переключатель) так чтобы при переключении менялись местами выводы output1 с output4 и output2 с output3 например:
Рисунок 4 — Реверс шагового двигателя
Просто контроллер:
Весь привод:
Купить микросхему счётчик CD4022 dip корпус (как на видео выше) 5шт.
Таймер NE555 dip корпус 5шт.
КАРТА БЛОГА (содержание)
Создание тестера шагового двигателя — Kronos Robotics
Каждый год я собираю несколько станков с ЧПУ. Хотя я могу вытащить одну из моих полных сборок 4-канального контроллера, это немного больше усилий, чем оно того стоит, если мне просто нужно провести простой тест привода.
Этот позволяет мне быстро проверить одноосную приводную систему.
I Одна ручка управляет скоростью шагового двигателя. Кнопка включает или отключает драйвер двигателя. Вторая кнопка управляет направлением вращения двигателя. Он имеет достаточную мощность для управления двигателями, которым требуется до 4 ампер на фазу.
Основные компоненты
Тестер шагового двигателя состоит из трех основных компонентов.
Источник питания
Тестер использует источник питания 24 В, 15 А. Хотя блок питания 24 В, 7 А подойдет, его стоимость и доступность обеспечат вам максимальную отдачу от затраченных средств.
Вы можете найти его здесь:
Источник питания 24 В, 15 А
Генератор импульсов
Этот маленький генератор импульсов работает как шарм, чтобы создавать импульсы, необходимые для движения шагового двигателя.
Он поддерживает:
- Включение двигателя
- Направление шага
- Шаговый импульс
Вы можете выбрать один из них здесь:
Генератор импульсов
Шаговый двигатель, как драйвер привода
2 показанный здесь. Он поддерживает до 3,5 ампер в непрерывном режиме и 4 ампер в пиковом режиме.Вы можете установить скорость микрошага от 1 до 32 шагов.
Получите это здесь:
Драйвер шагового двигателя на 4 ампера
Сборка
Основание
Я сделал основу для компонентов из древесно-стружечной плиты с меламиновым покрытием толщиной 3/4″, разрезанной на 11-1/2″ x 11-1/2″. 8-дюймовые отверстия, расположенные на расстоянии 6 дюймов друг от друга в задней части основания.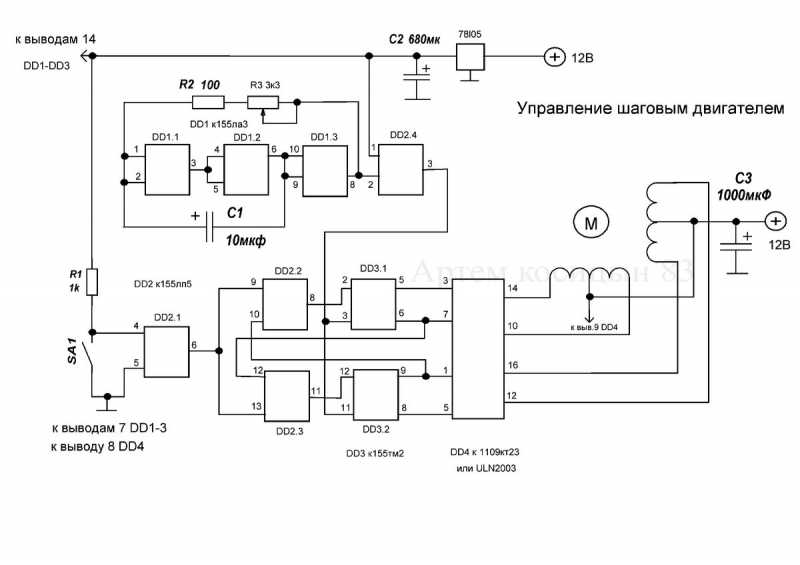 С их помощью я могу повесить тестер на стены перфорированной панели, когда он не используется. Я решил установить два алюминиевых уголка 3/4 дюйма по бокам блока питания. Они крепятся четырьмя крепежными винтами M4.
С их помощью я могу повесить тестер на стены перфорированной панели, когда он не используется. Я решил установить два алюминиевых уголка 3/4 дюйма по бокам блока питания. Они крепятся четырьмя крепежными винтами M4.
Крепление блока питания
Затем я использовал несколько шурупов №6, чтобы прикрепить блок питания к основанию. Он установлен близко к правому краю и примерно в 1/2 дюйма от передней части.
Крепление генератора импульсов и драйвера
Генератор импульсов крепится к основанию с помощью нескольких шурупов №4. Я добавил четыре шайбы №4 под каждую угол, чтобы плата не касалась поверхности основания
Драйвер шагового двигателя устанавливается на основание за генератором импульсов
Электропроводка
Питание переменного тока
Я подключил заземленный кабель питания к трем клеммам, обозначенным как «Заземление», «Нейтраль» и «Линия».
Обязательно закрепите шнур кабельным зажимом.
Питание генератора импульсов
Подключите питание к генератору импульсов, как показано здесь.
Обязательно используйте кабельные зажимы для фиксации проводов.
Питание драйвера
Подключите питание к драйверу шагового двигателя, как показано здесь.
Обязательно используйте кабельные зажимы для фиксации проводов.
Общий сигнал
Добавьте перемычку между ENA-, DIR- и PUL-. Протяните провод от этих перемычек к клемме с общим катодом генератора импульсов, как показано на рисунке.
Проволочные резисторы
Добавьте резистор 1K на концы трех проводов. Накройте термоусадочной трубкой.
Wire Enable Signal
Добавьте один из проводов резистора к ENA+ на драйвере двигателя и клемме ENA на генераторе импульсов.
Провод сигнала DIR
Добавьте один из проводов резистора к DIR+ на драйвере двигателя и клемме DIR на генераторе импульсов.
Проводной импульсный сигнал
Добавьте один из проводов резистора к клемме PUL+ на драйвере двигателя и клемме PUL на генераторе импульсов.
Проводные провода двигателя
Подсоедините четыре провода двигателя на приводе к четырехпозиционной клеммной колодке, как показано здесь.
Добавление разъема двигателя
Вы можете подключить разъемы двигателя к клеммной колодке или добавить разъем.
Здесь я подключаю 9-контактный разъем к клеммной колодке.
Работа
Индикатор питания
Индикатор питания загорается при подаче питания на генератор импульсов.
Регулятор скорости
Используйте ноу-хау для регулировки скорости двигателя.
- Против часовой стрелки = медленно
- По часовой стрелке = быстро
Включить
Чтобы включить драйвер и запустить двигатель, нажмите левую кнопку вниз. Красный светодиод рядом с кнопкой загорится при ее включении.
Направление
Нажмите правую кнопку, чтобы изменить направление.
Заключение
Некоторые вещи, о которых следует помнить. Генератор импульсов не имеет кривых ускорения или торможения, поэтому двигатель довольно легко заглохнуть на высоких скоростях.
Вот тестер шагового двигателя в действии:
Хранение
Вот тестер шагового двигателя, висящий на стене.
Драйвер шагового двигателя Архивы | Идеи схем I Электронные проекты DIY I Робототехника
РАДЖ ШАРМА Оставить комментарий
Я работаю над новым проектом, который представляет собой высоковольтный и сильноточный модуль трехфазного инвертора с использованием IGBT. проект, представленный здесь, первая ступень моей схемы, которая представляет собой 3-фазный сетевой фильтр ЭМС/ЭМП с конфигурацией треугольника, пожалуйста, обратитесь к схеме ниже, эти трехфазные фильтры ЭМП рассчитаны на любое напряжение до 480 В переменного тока и максимальный ток
Подробнее
РАДЖ ШАРМА Оставить комментарий
Узел редуктора для слайдера камеры с двигателем Nema 23 и зубчатым шкивом Узел редуктора обеспечивает в 4 раза больший крутящий момент по сравнению с двигателем NEMA 23 за счет использования шкива и ремня большого размера. Он оснащен зубчатым шкивом на главном выходном валу для привода зубчатого ремня для линейного движения. Устройство было разработано для управления слайдером профессиональной камеры, однако оно может
Он оснащен зубчатым шкивом на главном выходном валу для привода зубчатого ремня для линейного движения. Устройство было разработано для управления слайдером профессиональной камеры, однако оно может
Подробнее
РАДЖ ШАРМА Оставить комментарий
Проект компактного 5-фазного драйвера шагового двигателя может работать с двигателем до 3,5 А с питанием 12–30 В постоянного тока, драйвер имеет возможность устанавливать ток нагрузки, драйвер обеспечивает половинный шаг и полный шаг, а также простое управление с импульсом шага и направления, подстроечный потенциометр. для установки тока. SI-7510 представляет собой микросхему предварительного драйвера для управления 5-фазными шаговыми двигателями с обмоткой
Подробнее
РАДЖ ШАРМА Оставить комментарий
Универсальный монитор сигнала R/C на основе SMD-компонентов Bar-Graph и переключатель R/C — отличный инструмент для радиоуправляемого радиолюбителя, моделиста R/C и робототехники DIY. Крошечные дисплеи Bar-Graph обеспечивают яркий красный цвет, легко читаемый отображение сигнала радиоуправления (R/C) от 1 мс до 2 мс. Эта гистограмма имеет 20 сегментов одного цвета и отображает сигнал R/C в диапазоне
Крошечные дисплеи Bar-Graph обеспечивают яркий красный цвет, легко читаемый отображение сигнала радиоуправления (R/C) от 1 мс до 2 мс. Эта гистограмма имеет 20 сегментов одного цвета и отображает сигнал R/C в диапазоне
Подробнее
РАДЖ ШАРМА Оставить комментарий
Плата питания компактного электропривода основана на модуле IPM STK554U362A от ON semiconductor. Он обеспечивает доступное и простое в использовании решение для управления мощными бесщеточными сервоприводами, двигателями переменного тока и бесщеточными двигателями постоянного тока в широком спектре приложений, таких как электробытовая техника, кондиционеры, компрессоры, вентиляторы, высококачественные электроинструменты. и 3-фазные инверторы для моторных приводов в
Подробнее
РАДЖ ШАРМА Оставить комментарий
Драйвер двигателя с полным H-мостом для шагового двигателя и двигателя постоянного тока с использованием схемы LMD18245 и схемы печатной платы
Подробнее
РАДЖ ШАРМА Оставить комментарий
Драйвер униполярного шагового двигателяс использованием микроконтроллера PIC16F873 и ULN2003, нагрузка до 200 мА, питание от 12 В до 24 В постоянного тока. Регулировка скорости с помощью переключателей вверх-вниз
Подробнее
РАДЖ ШАРМА Оставить комментарий
UC3717 был разработан для управления током в одной обмотке биполярного шагового двигателя. Схема состоит из LS-TTL-совместимого логического входа, датчика тока, моностабильного и выходного каскада со встроенным защитным диодом.
Подробнее
РАДЖ ШАРМА Оставить комментарий
Плата контроллера униполярного 4-фазного шагового двигателя поможет вам управлять шаговым двигателем или 4 отдельными соленоидами. Эта схема, состоящая из транзисторов, которые служат в качестве усилителя тока, а также диода для предотвращения повреждения обратной ЭДС, в схеме используются транзисторы Дарлингтона для обеспечения высокой токовой емкости униполярного шагового двигателя.
