Что такое ПИД-регулятор. Как работает пропорциональная, интегральная и дифференциальная составляющие. Зачем нужен ПИД-регулятор в системах управления. Как настроить параметры ПИД-регулятора. Примеры применения ПИД-регуляторов в промышленности.
Что такое ПИД-регулятор и зачем он нужен
ПИД-регулятор (пропорционально-интегрально-дифференциальный регулятор) — это устройство в управляющем контуре с обратной связью, используемое в системах автоматического управления для формирования управляющего сигнала. Цель работы ПИД-регулятора — минимизировать отклонение регулируемой величины от заданного значения.
Основные преимущества использования ПИД-регуляторов:
- Более точное и плавное регулирование по сравнению с двухпозиционным (релейным) регулированием
- Возможность управления инерционными процессами
- Компенсация возмущающих воздействий
- Снижение перерегулирования и колебательности
- Повышение устойчивости системы управления
ПИД-регуляторы применяются в различных отраслях промышленности для управления температурой, давлением, расходом, уровнем, скоростью и другими технологическими параметрами.

Принцип работы ПИД-регулятора
ПИД-регулятор формирует управляющий сигнал, являющийся суммой трёх слагаемых:
- Пропорциональная составляющая (P) — пропорциональна отклонению регулируемой величины от заданного значения
- Интегральная составляющая (I) — пропорциональна интегралу отклонения регулируемой величины от заданного значения
- Дифференциальная составляющая (D) — пропорциональна производной отклонения регулируемой величины
Математически работу ПИД-регулятора можно описать следующим выражением:
u(t) = Kpe(t) + Ki∫e(t)dt + Kdde(t)/dt
где:
- u(t) — управляющий сигнал
- e(t) — сигнал рассогласования (ошибка)
- K p, Ki, Kd — коэффициенты усиления пропорциональной, интегральной и дифференциальной составляющих соответственно
Пропорциональная составляющая ПИД-регулятора
Пропорциональная составляющая ПИД-регулятора вырабатывает управляющий сигнал, пропорциональный величине отклонения регулируемого параметра от заданного значения:
P = Kp * e(t)
где Kp — коэффициент усиления пропорциональной составляющей.

Основные особенности П-регулирования:
- Чем больше коэффициент Kp, тем быстрее реакция регулятора на отклонение
- При слишком большом Kp возможно перерегулирование и колебания
- Не устраняет статическую ошибку регулирования
Интегральная составляющая ПИД-регулятора
Интегральная составляющая пропорциональна интегралу отклонения регулируемой величины от заданного значения:
I = Ki * ∫e(t)dt
где Ki — коэффициент усиления интегральной составляющей.
Основные особенности И-регулирования:
- Устраняет статическую ошибку регулирования
- Повышает точность регулирования в установившемся режиме
- Может вызывать перерегулирование и колебания при больших значениях Ki
Дифференциальная составляющая ПИД-регулятора
Дифференциальная составляющая пропорциональна скорости изменения отклонения регулируемой величины:
D = Kd * de(t)/dt
где Kd — коэффициент усиления дифференциальной составляющей.
Основные особенности Д-регулирования:
- Улучшает быстродействие системы
- Уменьшает перерегулирование
- Повышает устойчивость системы
- Может усиливать влияние помех при больших значениях Kd
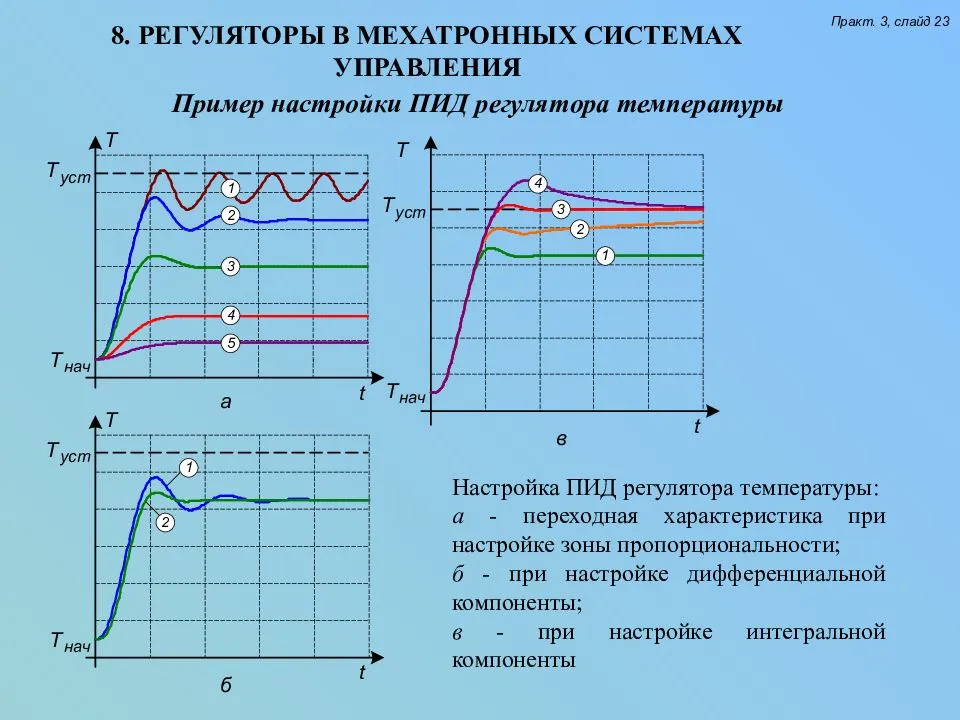
Настройка параметров ПИД-регулятора
Правильная настройка коэффициентов Kp, Ki и Kd позволяет добиться оптимального качества регулирования. Существует несколько методов настройки ПИД-регуляторов:
- Ручная настройка методом проб и ошибок
- Метод Циглера-Никольса
- Метод CHR (Chien, Hrones и Reswick)
- Автоматическая настройка (автонастройка)
- Настройка с помощью специализированного ПО
При настройке обычно стремятся обеспечить следующие показатели качества регулирования:
- Минимальное время регулирования
- Минимальное перерегулирование
- Максимальная устойчивость системы
- Минимальная статическая ошибка
Применение ПИД-регуляторов в промышленности
ПИД-регуляторы широко используются в различных отраслях промышленности для управления технологическими процессами. Примеры применения:
- Регулирование температуры в печах, теплообменниках, химических реакторах
- Поддержание уровня жидкости в резервуарах и емкостях
- Управление давлением в трубопроводах и сосудах
- Регулирование расхода жидкостей и газов
- Управление скоростью и позиционированием в сервоприводах
- Поддержание концентрации веществ в химических процессах
ПИД-регуляторы являются основным типом регуляторов в современных системах автоматизации технологических процессов благодаря простоте реализации и настройки, а также хорошему качеству регулирования в большинстве практических задач.

Преимущества и недостатки ПИД-регулирования
ПИД-регуляторы обладают рядом преимуществ, но также имеют некоторые недостатки. Рассмотрим основные плюсы и минусы использования ПИД-регуляторов в системах автоматического управления.
Преимущества ПИД-регуляторов:
- Универсальность — подходят для управления широким спектром процессов
- Простота реализации и настройки
- Хорошее качество регулирования для большинства практических задач
- Низкая чувствительность к помехам в измерительном канале
- Возможность работы с объектами без точной математической модели
Недостатки ПИД-регуляторов:
- Сложность настройки для некоторых объектов управления
- Возможность возникновения автоколебаний при неправильной настройке
- Чувствительность к изменению параметров объекта управления
- Невозможность компенсации нелинейностей объекта
- Ограниченные возможности при управлении сложными многосвязными объектами
Несмотря на некоторые недостатки, ПИД-регуляторы остаются наиболее распространенным типом регуляторов в промышленности благодаря простоте и надежности.

Цифровая реализация ПИД-регулятора
В современных системах управления ПИД-регуляторы чаще всего реализуются в цифровом виде на базе микроконтроллеров или промышленных контроллеров. Рассмотрим основные особенности цифровой реализации ПИД-алгоритма.
Дискретная форма ПИД-регулятора может быть представлена следующим выражением:
u(k) = Kpe(k) + Ki∑e(i) + Kd[e(k) — e(k-1)]
где:
- u(k) — управляющее воздействие на текущем шаге
- e(k) — ошибка регулирования на текущем шаге
- e(k-1) — ошибка регулирования на предыдущем шаге
- ∑e(i) — сумма ошибок регулирования (интегральная составляющая)
Основные особенности цифровой реализации ПИД-регулятора:
- Необходимость выбора оптимального периода дискретизации
- Ограничение интегральной составляющей для предотвращения интегрального насыщения
- Фильтрация входного сигнала для уменьшения влияния помех
- Возможность реализации дополнительных функций (автонастройка, адаптация и т.д.)
Цифровая реализация позволяет легко изменять параметры регулятора и алгоритм его работы, что повышает гибкость системы управления.

Заключение
ПИД-регуляторы являются мощным и универсальным инструментом в современных системах автоматического управления. Понимание принципов работы и правильная настройка ПИД-регуляторов позволяют эффективно решать широкий спектр задач управления в различных отраслях промышленности.
Основные преимущества ПИД-регулирования:
- Высокая точность поддержания заданного значения регулируемой величины
- Хорошая устойчивость и быстродействие системы управления
- Возможность управления сложными инерционными объектами
- Компенсация возмущающих воздействий
Несмотря на появление более сложных алгоритмов управления, ПИД-регуляторы остаются основным средством автоматизации технологических процессов благодаря простоте реализации, накопленному опыту применения и хорошему соотношению эффективность/сложность для большинства практических задач.
Схема кулачкового контроллера
Строительные машины и оборудование, справочник
Остальное о мостовых кранах
Публикация:
Схема кулачкового контроллера
Читать далее:
Схема магнитного контроллера
Схема кулачкового контроллера
Схемы управления приводами различных крановых механизмов с асинхронными двигателями, имеющими фазный ротор, примерно одинаковы и отличаются режимами их включения. Для управления приводами на ряде кранов применяют силовые кулачковые контроллеры.Принципиальная электрическая схема (развертка) силового кулачкового контроллера ККТ-61, управляющего механизмом подъема груза, приведена на рис. 97, а. Контроллер имеет симметричное исполнение, т. е. замыкает одинаковое число контактных блоков (пять) при переводе рукоятки управления влево (на подъем груза) и вправо (на опускание) от нулевого положения. Четыре верхних контактных блока (К1, КЗ, К5, К7) замыкают цепь статора. При переводе рукоятки влево на позицию 1 замыкаются контакты КЗ и К7, подающие напряжение на обмотку статора двигателя. Контакты остаются в замкнутом положении на всех пяти позициях, соответствующих подъему груза. При переводе рукоятки в противоположное положение, соответствующее опусканию груза (вправо), контакты КЗ и К7 размыкаются и замыкаются контакты К1 и К5, изменяющие порядок подключения двух фаз сети к обмотке статора, в результате чего осуществляется реверсирование двигателя. Данные контакты также остаются в замкнутом положении на всех пяти позициях. Замкнутые контакты на схеме показаны жирными точками, жирная линия обозначает, что контакты замкнуты в соответствующих позициях рукоятки контроллера.
Четыре верхних контактных блока (К1, КЗ, К5, К7) замыкают цепь статора. При переводе рукоятки влево на позицию 1 замыкаются контакты КЗ и К7, подающие напряжение на обмотку статора двигателя. Контакты остаются в замкнутом положении на всех пяти позициях, соответствующих подъему груза. При переводе рукоятки в противоположное положение, соответствующее опусканию груза (вправо), контакты КЗ и К7 размыкаются и замыкаются контакты К1 и К5, изменяющие порядок подключения двух фаз сети к обмотке статора, в результате чего осуществляется реверсирование двигателя. Данные контакты также остаются в замкнутом положении на всех пяти позициях. Замкнутые контакты на схеме показаны жирными точками, жирная линия обозначает, что контакты замкнуты в соответствующих позициях рукоятки контроллера.
Рис. 97. Принципиальная схема кулачкового контроллера КТ-61:
а—развертка, б—включение пускорегулирующих сопротивлений в цепь ротора, в— механические характеристики электродвигателя
Рекламные предложения на основе ваших интересов:
Дополнительные материалы по теме:
Пять средних контактных блоков (К2, К4, Кб, К8 и К10) коммутируют цепи ротора. В первой позиции рукоятки контроллера указанные контакты разомкнуты, все пускорегулирующие сопротивления включены в цепь ротора (рис. 97, б, 1), ток в цепи ротора минимальный и последний начинает разгоняться по кривой 1С (рис. 97, в). При переводе рукоятки контроллера в позицию 2 замыкается контакт К2 и отключает часть первого сопротивления на ‘участке Р5 — Р6 (рис. 97, б, 2), в результате чего сила тока в цепи ротора увеличивается и ротор продолжает разгоняться по кривой 2С (рис. 97, в). Последовательным включением остальных контактных блоков ступенчато отключают все пускорегулирующие сопротивления (рис. 97, б, 5), закорачивают все обмотки ротора и переводят двигатель на работу по естественной характеристике 5С (рис. 97, в). Три нижних контактных блока (К9, К11 и К12) являются блокировочными и предназначены для замыкания цепей управления, например цепи катушки линейного контактора защитной панели крана.
В первой позиции рукоятки контроллера указанные контакты разомкнуты, все пускорегулирующие сопротивления включены в цепь ротора (рис. 97, б, 1), ток в цепи ротора минимальный и последний начинает разгоняться по кривой 1С (рис. 97, в). При переводе рукоятки контроллера в позицию 2 замыкается контакт К2 и отключает часть первого сопротивления на ‘участке Р5 — Р6 (рис. 97, б, 2), в результате чего сила тока в цепи ротора увеличивается и ротор продолжает разгоняться по кривой 2С (рис. 97, в). Последовательным включением остальных контактных блоков ступенчато отключают все пускорегулирующие сопротивления (рис. 97, б, 5), закорачивают все обмотки ротора и переводят двигатель на работу по естественной характеристике 5С (рис. 97, в). Три нижних контактных блока (К9, К11 и К12) являются блокировочными и предназначены для замыкания цепей управления, например цепи катушки линейного контактора защитной панели крана.
Рекламные предложения:
Читать далее: Схема магнитного контроллера
Категория: — Остальное о мостовых кранах
Главная → Справочник → Статьи → Форум
Подключение контроллера — читать инструкцию
Рассмотрим пример подключения контроллера со встроенным считывателем CTV-CR20EM
КОНТРОЛЛЕР СО ВСТРОЕННЫМ СЧИТЫВАТЕЛЕМ
Автономный контроллер CTV-CR20EM со встроенным
считывателем Proximity карт EM-MARINE предназначен для
построения автономной системы контроля и управления доступом для одной или двух точек прохода.
Контроллер выполнен из ударопрочного пластика и имеет класс защиты IP68, что позволяет использовать его в различных климатических условиях. Автономный контроллер CTV-CR20EM программируется с пульта или с помощью мастер-карт которые поставляются в комплекте.
CTV-CR20EM поддерживает работу 10000 ключей пользователей и позволяет реализовать режим работы «шлюз», при использовании второго аналогичного контроллера.
ВНИМАНИЕ: Изготовитель сохраняет за собой право
вносить конструктивные изменения, не нашедшие отражения
в настоящей инструкции, которые не ведут к ухудшению заявленных характеристик, в любое время и без предварительного
уведомления.
НАЗНАЧЕНИЕ КОНТАКТОВ КОНТРОЛЛЕРА
Розовый провод RESET — используются для сброса настроек
Розовый провод GND — используются для сброса настроек
Зеленый провод D0 — Вход для подключения цепи данных считывателя
Белый провод D1 — Вход для подключения цепи данных считывателя
Серый провод ALARM — подключение сирены
Желтый провод OPEN — Кнопка выход или вызывная панель видеодомофона
Коричневый провод D_IN — подключение датчика размыкания двери
Красный провод + 12V — Контакт питания +12V от блока питания
Черный провод GND — «Земля» и общий «минус»
Синий провод NO — контакт реле, нормально открытый (разомкнутый)
Фиолетовый провод COM — общий контакт реле
Оранжевый NC — контакт реле, нормально закрытый (замкнутый)
СХЕМА ПОДКЛЮЧЕНИЯ КОНТРОЛЛЕРА СКУД
Основные режимы
1. Использование устройства в режиме автономного контроллера со встроенным считывателем.
Использование устройства в режиме автономного контроллера со встроенным считывателем.
2. Использование устройства в режиме контроллера с
подключением дополнительного считывателя с выходом
Wiegand26
СХЕМА ПОДКЛЮЧЕНИЯ ДВУХ КОНТРОЛЛЕРОВ
Дополнительные режимы
1. Использование устройства в режиме двух контроллеров
для одной двери.
В этом режиме первый контроллер устанавливается внутри помещения и используется как контроллер, второй устанавливается снаружи и используется как считыватель. Включите режим «ШЛЮЗ» на всех устройствах. При такой схеме
количество пользователей можно увеличить до
20000. Для объединения баз данных пользователей, установки на двух устройствах должны быть идентичны, включая мастер-код администратора.
2. Использование устройства в режиме двух контроллеров
для двух дверей (режим «ШЛЮЗ»)
В этом режиме установите один контроллер на первую
дверь, второй – на вторую. Включите режим «ШЛЮЗ» на всех
устройствах. При такой схеме система будет работать следующим образом: пока первая дверь открыта — вторая всегда будет
закрыта. После того, как закрыли первую дверь, – можно открыть вторую.
После того, как закрыли первую дверь, – можно открыть вторую.
3. Использование устройства в режиме Antipassback для одной двери. Установите контроллер внутри помещения, а считыватель снаружи. Включите режим Antipassback в основном режиме. При такой схеме система будет работать следующим образом: пользователь предъявляет карту на входе и на выходе. Пользователь не сможет войти или выйти два раза подряд.
4. Использование устройства в режиме Antipassback для двух дверей. Установите первый контроллер на первой двери и включите режим Antipassback в дополнительном режиме. Установите второй контроллер на вторую дверь и включите режим Antipassback в основном режиме. Пользователь не сможет пройти одну и ту же дверь более одного раза, не пройдя через вторую дверь.
СХЕМА ПОДКЛЮЧЕНИЯ КОНТРОЛЛЕРА К ВИДЕОДОМОФОНУ
На рисунке изображена схема подключения контроллера к вызывной панели видеодомофона и электромеханического замка.
Для подключения вызывной панели к контроллеру с использованием электромеханического замка задействованы контакты: «COM» — общий контакт реле и контакт «NO» — нормально-открытый контакт реле.
Провод «COM» от вызывной панели подключается на контакт контроллера «OPEN»
Провод «NO» от вызывной панели видеодомофона подключается на контакт контроллера «NO», сюда же подключается один из проводников от электромеханического замка. Второй проводник замка подключается к общему «Минусу» блока питания. Тем самым замок будет открываться как с видеодомофона, так и при помощи карт или ключей запрограммированных в контроллер.
Обратите внимание! У разных производителей вызывных панелей, цвета контактов «COM» и «NO» могут отличаться.
РЕЖИМ РАБОТЫ ИНДИКАЦИИ КОНТРОЛЛЕРА
Дежурный режим — Световая индикация мигает красным. Звуковой индикации нет.
Срабатывание реле — Световая индикация горит зеленым. Звуковая индикация подает короткий сигнал.
Вход в режим программирования — Световая индикация горит красным. Звуковая индикация подает короткий сигнал.
Успешная операция — Световая индикация горит зеленым. Звуковая индикация подает короткий сигнал.
Ошибка — Световой индикации нет. Звуковая индикация подает три коротких сигнала.
Выход из режима программирования — Световая индикация мигает красным. Звуковая индикация подает длинный сигнал.
Тревога — Световая индикация мигает красным. Звуковая индикация подает непрерывный сигнал.
ПОДГОТОВКА КОНТРОЛЛЕРА К РАБОТЕ
Сброс настроек
1. Отключите питание устройства.
2. Соедините два розовых провода.
3. Включите питание устройства и дождитесь двойного звукового сигнала.
4. Разомкните розовые провода.
5. Снимите питание.
6. Подайте питание. Когда индикатор устройства загорится зеленый, считайте
последовательно две карты (в комплекте устройства). Первая
карта будет мастер-картой для ввода пользователей (ADD
card), вторая — для удаления пользователей (DEL card).
Примечание: Сброс к заводским настройкам не удаляет
пользовательские карты доступа.
ВХОД В РЕЖИМ ПРОГРАММИРОВАНИЯ КОНТРОЛЛЕРА
1. Для входа в режим программирования введите с пульта управления:
Для входа в режим программирования введите с пульта управления:
* код администратора #
Примечание: По умолчанию код администратора 999999.
2. Для выхода из режима программирования введите с
пульта управления: » * «
3. Для изменения кода администратора введите с пульта управления: «0» «новый код» «#» «новый код» «#»
Примечание: Код должен быть не менее 6 и не более 8 символов.
ДОБАВЛЕНИЕ КАРТЫ ПОЛЬЗОВАТЕЛЯ С ПОМОЩЬЮ ПУЛЬТА УПРАВЛЕНИЯ
1. Ввод чтением карты:
Введите: «1» считайте карту «#» считайте карту «#»
2. Ввод номера карты:
Введите: «1» номер карты «#» номер карты «#»
Примечание: Номер карты должен состоять из 8-10 символов. Если номер карты имеет меньшее количество символов,
введите нули перед номером.
3. Ввод блока карт:
Введите: «1» количество карт «#» номер первой карты «#»
Примечание: Метод может использоваться для ввода идущих последовательно номеров карт. Количество карт от 1 до
9999. Номер карты должен состоять из 8-10 символов.
Количество карт от 1 до
9999. Номер карты должен состоять из 8-10 символов.
УДАЛЕНИЕ КАРТЫ ПОЛЬЗОВАТЕЛЯ С ПОМОЩЬЮ ПУЛЬТА УПРАВЛЕНИЯ
1. Удаление чтением карты:
Введите: «2» считайте карту «#» считайте карту «#»
2. Удаление номера карты:
Введите: «2» номер карты «#» номер карты «#»
3. Удаление всех карт:
Введите: «2» «0000» «#»
Примечание: Будут удалены все карты, кроме карт администратора.
УСТАНОВКА РЕЖИМОВ БЕЗОПАСНОСТИ
1. Нормальный режим (заводские установки):
Введите: «3» «0» «#»
Примечание: Режим безопасности отключен.
2. Режим блокировки:
Введите: «3» «1» «#»
3. Режим тревоги:
Введите: «3» «2» «#»
Примечание: Если в течении 10 минут будут поднесены
подряд 10 незарегистрированных карт, устройство будет издавать звуковой сигнал тревоги.
УСТАНОВКА РЕЖИМА РАБОТЫ РЕЛЕ УПРАВЛЕНИЯ ЗАМКОМ
Введите: «4» цифры от «0» до «99» далее «#»
Примечание: Время открытия (разблокировки замка)
устанавливается от 0 до 99 секунд (0 соответствует -50мсек).
УСТАНОВКА ВРЕМЕНИ РАБОТЫ СИГНАЛА «ТРЕВОГА»
Введите: «5» цифры от «0» до «3» далее «#»
Примечание: Длительность сигнала тревога должна находиться в пределах от одной (заводские установки) до трех
минут.
УСТАНОВКА РЕЖИМА РАБОТЫ ИНДИКАТОРА (КРАСНЫЙ)
1. Отключить индикацию:
Введите: «6» «0» далее «#»
2. Включить индикацию (по умолчанию):
Введите: «6» «1» далее «#»
УСТАНОВКА РЕЖИМА «ШЛЮЗ»
1. Отключить режим «ШЛЮЗ» (по умолчанию):
Введите: «7» «0» далее «#»
2. Включить режим «ШЛЮЗ»:
Введите: «7» «1» далее «#»
УСТАНОВКА РЕЖИМА ANTIPASSBACK
1. Antipassback отключен (по умолчанию):
Введите: «8» «0» далее «#»
2. Antipassback включен в основном режиме:
Введите: «8» «1» далее «#»
3. Antipassback включен в дополнительном режиме:
Введите: «8» «2» далее «#»
ДОБАВЛЕНИЕ КАРТ ПОЛЬЗОВАТЕЛЯ С ПОМОЩЬЮ МАСТЕР-КАРТЫ (КАРТА АДМИНИСТРАТОРА)
1. Добавить пользователя:
Добавить пользователя:
Поднесите мастер-карту с надписью «ADD USER», затем карту пользователя, далее мастер-карту с надписью «ADD USER»
Примечание: Карты пользователя могут добавляться последовательно без выхода из режима программирования.
2. Удалить пользователя:
Поднесите мастер-карту с надписью «DELETE USER», затем карту пользователя, далее мастер-карту с надписью «DELETE USER»
Примечание: Карты пользователя могут удаляться последовательно без выхода из режима программирования.
ТЕХНИЧЕСКИЕ ХАРАКТЕРИСТИКИ КОНТРОЛЛЕРА CTV-CR20EM
Количество пользователей — 10000
Тип идентификатора — EM-MARINE
Расстояние считывания идентификатора — 5-8 см
Интерфейс подключения — Wiegand 26
Время срабатывания реле замка — 1-99с
Время срабатывания тревоги — 1-3 мин
Реле замка — До 2А, 12В(DC)
Питание 12В(DC), 0,3А
Рабочая температура -40 — +60⁰С
Влажность Не более 90%
Размеры 110х48х20 мм
Вес 0,4 кг
Цепь контроллера
В этом разделе вы добавите встроенный контроллер. Контроллер использует два
ОУ на счетверенной микросхеме ОУ LM324. Схема показана ниже. Обратите внимание, что с тех пор
есть два операционных усилителя, и каждый инвертирует, минусы компенсируются. Знак
срок обратной связи зависит от того, как подключены провода тача.
Контроллер использует два
ОУ на счетверенной микросхеме ОУ LM324. Схема показана ниже. Обратите внимание, что с тех пор
есть два операционных усилителя, и каждый инвертирует, минусы компенсируются. Знак
срок обратной связи зависит от того, как подключены провода тача.
Левый операционный усилитель в схеме представляет собой инвертирующий сумматор/интегратор. Вход/выход соотношение для этой части схемы:
Правый операционный усилитель имеет регулируемое инвертирующее усиление. R3 — это потенциометр. регулируется в диапазоне от 0 до 100 кОм. Отношения ввода/вывода для этой части схема:
Вместе эти две цепи образуют неинвертирующий регулируемый интегральный регулятор. представлен пунктирной рамкой на блок-схеме.
-
Подайте питание на макетную плату
Картинки, следующие за этим и следующими пунктами, могут быть полезны при сборке схемы. Также обратитесь к схеме выводов микросхемы операционного усилителя.
Убедитесь, что питание выключено. Подключите клемму GND усилителя к клемме GND на макетной плате с помощью банановый кабель. Подсоедините контакт GND к верхнему ряду макетной платы небольшой проволочной перемычкой. Соедините верхний ряд макетной платы со вторым столбцом справа с помощью маленький джемпер. Это столбец GND. Длинным проводом соедините клемму -V усилителя с крайней правой колонкой макет. Это столбец -V. Длинным проводом соедините клемму +V усилителя с первой колонкой и слева от правой половины макетной платы. 
-
Вставьте микросхему операционного усилителя и подайте +/-V
Вставьте микросхему в центр правой половины макетной платы так, чтобы она располагалась поперек небольшой зазор посередине с концом с надрезом вверх (см. рисунок). Соедините контакт +Vcc микросхемы с колонкой +V небольшой перемычкой. Соедините вывод -Vcc микросхемы с столбцом -V с помощью небольшой перемычки. Подключите входные контакты + двух операционных усилителей (контакты 12 и 3 на рисунке) к GND. столбик с маленькой перемычкой. Это устанавливает нулевое опорное напряжение для двух операционных усилителей. Разъемы питания для схемы операционного усилителя -
Build Summer/Integrator
Подключить конденсатор между выходным и отрицательным входными контактами первого операционного усилителя (контакты 14 и 13).  конденсатор будет помечен либо .1M, либо 104M.
конденсатор будет помечен либо .1M, либо 104M. Присоедините два резистора 560K (зелено-сине-желтый) между отрицательным входом первого операционный усилитель (вывод 13) и два разных свободных ряда макетной платы. На них будут ссылаться как входные резисторы. -
Установить потенциометр и построить цепь усиления
С помощью мультиметра измерить сопротивление потенциометра между средней вывод и один из концевых выводов. При измерении сопротивлений старайтесь не прикасаться к провода мультиметра. Установите сопротивление горшка на первое значение, рассчитанное ранее. Присоедините потенциометр между отрицательным входом второго операционного усилителя (контакт 2) и свободный ряд макетной платы. 
Присоедините резистор 1,5 кОм между свободным концом потенциометра и выходом первого операционный усилитель (вывод 14). Подключите резистор 1,5 кОм между выходным и отрицательным входным контактами второго операционного усилителя. (контакты 1 и 2). -
Подключение контроллера к системе
Отсоедините красный зажим от разъема IN усилителя и присоедините его к свободному концу. одного из входных резисторов в схеме операционного усилителя. Это -r(t), эталонный ввод. Отсоедините красный зажим от сигнального провода тахометра. Прикрепите проволоку к свободному концу другой входной резистор. Закрепите красный зажим на свободном конце этого резистора.  Это
сигнал обратной связи, -y.
Это
сигнал обратной связи, -y. Соедините проводом выходной контакт второго операционного усилителя (контакт 1) и клемму IN. усилителя. Это управляющий сигнал, т.е. Разъемы питания для схемы операционного усилителя Настройка для замкнутого контура
Аджай Джунжа
Вт, 20 апреля, 13:30:59 EST 1999
Следующий расчет прибыли
[ Up ][ Идентификация объекта ][ Схема контроллера ][ Расчет усиления ][ Отклик замкнутого контура ][ Запись ]
ПИД-регулятор — часть 1
» Перейти к дополнительным материалам
В этой серии статей мы рассмотрим, как реализовать как аналоговые, так и цифровые системы управления. Мы будем использовать ПИД-регулятор (пропорционально-интегрально-дифференциальный). С помощью ПИД-регулятора мы можем управлять тепловыми, электрическими, химическими и механическими процессами. ПИД-регулятор находится в основе многих промышленных систем управления.
Мы будем использовать ПИД-регулятор (пропорционально-интегрально-дифференциальный). С помощью ПИД-регулятора мы можем управлять тепловыми, электрическими, химическими и механическими процессами. ПИД-регулятор находится в основе многих промышленных систем управления.
В этой первой из трех статей мы ответим на вопросы «почему». Мы также заложим основу, чтобы лучше понять, что такое ПИД-регулятор. В последующих частях мы рассмотрим, как настроить ПИД-регулятор и как реализовать цифровой ПИД-регулятор с помощью ZILOG Encore! микропроцессор.
Цель этой серии — познакомить вас с миром управляющей электроники. Концепции будут объяснены простым, интуитивно понятным способом, и будут представлены полезные практические примеры. Математика будет сведена к абсолютному минимуму. Это не значит, что математика не важна. Наоборот, системы управления можно моделировать и анализировать математически. Математика не что иное, как удивительно, и я бы посоветовал вам внимательно изучить ее. Существуют сотни книг, объясняющих теорию и математику систем управления. Эти книги познакомят вас с мощными инструментами, такими как преобразования Лапласа, корневое геометрическое место и графики Боде. Опять же, эта серия статей едва касается поверхности. Еще многое предстоит узнать.
Существуют сотни книг, объясняющих теорию и математику систем управления. Эти книги познакомят вас с мощными инструментами, такими как преобразования Лапласа, корневое геометрическое место и графики Боде. Опять же, эта серия статей едва касается поверхности. Еще многое предстоит узнать.
Что такое ПИД-регулятор?
Термин PID является аббревиатурой от Proportional Integral Derivative. ПИД-регулятор является частью системы обратной связи. Система PID использует пропорциональные, интегральные и производные элементы привода для управления процессом. Некоторые из вас уже знают, что означают P, I и D. Не волнуйтесь, если вы этого не сделаете; мы скоро рассмотрим эти термины с простыми для понимания примерами.
Зачем мне ПИД-регулятор?
Вам нужен PID, потому что есть некоторые вещи, которые трудно контролировать стандартными методами. Позвольте мне проиллюстрировать это примером. Мой первый опыт работы с системами управления оказался неудачным. Моя цель состояла в том, чтобы регулировать мощность источника питания с помощью микроконтроллера PIC. PIC считывал выходное напряжение с помощью АЦП и настраивал ШИМ для регулирования выходного сигнала. Стратегия управления была очень проста: если напряжение было ниже заданного значения, включить ШИМ. Если измеренное напряжение было выше уставки, то отключите ШИМ. Блок питания PIC почти заработал. Он действительно производил выходное напряжение постоянного тока, которое я хотел. К сожалению, он также имеет значительные пульсации переменного тока на сигнале постоянного тока.
PIC считывал выходное напряжение с помощью АЦП и настраивал ШИМ для регулирования выходного сигнала. Стратегия управления была очень проста: если напряжение было ниже заданного значения, включить ШИМ. Если измеренное напряжение было выше уставки, то отключите ШИМ. Блок питания PIC почти заработал. Он действительно производил выходное напряжение постоянного тока, которое я хотел. К сожалению, он также имеет значительные пульсации переменного тока на сигнале постоянного тока.
Стратегия управления, которую я только что описал, называется включением-выключением или релейным управлением. Многие типы систем используют эту стратегию управления. Возьмем, к примеру, печь в моем доме. Когда температура ниже заданной, печь включается. Когда температура выше заданной, печь выключается. Как и в моем блоке питания, график зависимости температуры от времени представляет собой синусоиду.
Для некоторых видов контроля это допустимо; для других это не так. Вы не хотели бы использовать этот тип управления для серводвигателя — случались бы плохие вещи! Только представьте — двигатель будет работать на полную мощность в одном направлении, а в следующий момент — на полной мощности в другом направлении. Вы можете видеть, откуда взялся термин bang-bang. Этот сервопривод долго не протянет!
Вы можете видеть, откуда взялся термин bang-bang. Этот сервопривод долго не протянет!
ПИД-регулятор выводит системы управления на новый уровень. Он может обеспечить управляемый — почти интеллектуальный — привод для систем. Теперь мы рассмотрим отдельные компоненты PID-системы. Этот шаг необходим для понимания всей системы PID. Пожалуйста, не пропускайте этот раздел; вы должны знать, как функционируют отдельные компоненты, чтобы понять систему в целом.
Что такое пропорциональность?
Это просто. Пропорциональная составляющая — это просто усиление. Мы можем использовать инвертирующий операционный усилитель, как показано на рис. 9.0230 Рисунок 1 .
РИСУНОК 1.
В этой схеме операционного усилителя коэффициент усиления определяется значениями резисторов. У нас есть следующее математическое соотношение:
V out = -V in * R f /R i
Что такое интеграл?
Интеграл — сокращение от интегрирования. Вы можете думать об этом как о накоплении (добавлении) количества с течением времени. Например, сейчас вы интегрируете эту информацию в свою базу знаний. В вашем хранилище знаний есть компоненты как времени, так и знаний. Очевидно, что все мы начинали как младенцы, практически ничего не зная. Со временем мы интегрировали знания в наш мозг.
Вы можете думать об этом как о накоплении (добавлении) количества с течением времени. Например, сейчас вы интегрируете эту информацию в свою базу знаний. В вашем хранилище знаний есть компоненты как времени, так и знаний. Очевидно, что все мы начинали как младенцы, практически ничего не зная. Со временем мы интегрировали знания в наш мозг.
В нашем ПИД-регуляторе мы интегрируем напряжение с течением времени. Схема цепи интегратора показана на рис. 2 .
РИСУНОК 2.
Выходное напряжение математически описывается следующим уравнением: напряжения и времени. Рассмотрим работу идеального интегратора. Мы можем упростить математику, сделав член 1/RC равным 1 (т. е. пусть R = 100 кОм и C = 10 мкФ). Рисунок 3 иллюстрирует отношения ввода/вывода интегратора.
РИСУНОК 3.
В интервале времени от 0 до 2 секунд подайте прямоугольную волну 2 В на вход интегратора.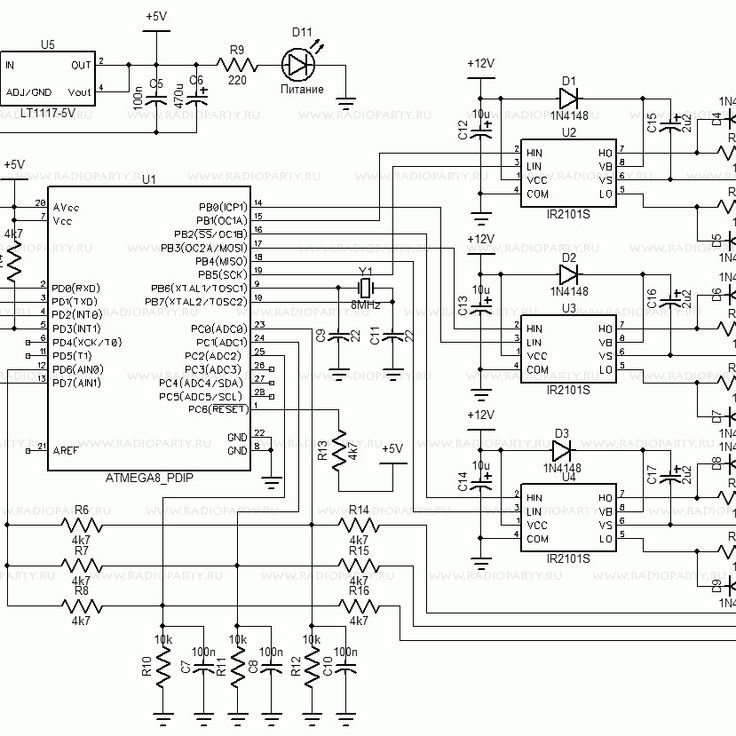 Выход интегратора в конце этого периода времени составляет -4 В (помните, что схема инвертирует). Интегратор накопил сигнал 2 В за 2 секунды. Площадь равна 4. От Т2 до Т4 на интегратор не подается напряжение. Выход без изменений. В оставшейся части этой диаграммы вы можете видеть, что выход интегратора меняет полярность, когда полярность входного сигнала меняется.
Выход интегратора в конце этого периода времени составляет -4 В (помните, что схема инвертирует). Интегратор накопил сигнал 2 В за 2 секунды. Площадь равна 4. От Т2 до Т4 на интегратор не подается напряжение. Выход без изменений. В оставшейся части этой диаграммы вы можете видеть, что выход интегратора меняет полярность, когда полярность входного сигнала меняется.
В предыдущем обсуждении предполагался идеальный интегратор. Настоящие конденсаторы будут иметь некоторую утечку и будут иметь тенденцию к саморазряду. Кроме того, настоящие операционные усилители могут заряжать конденсатор без входа. Если схема построена так, как нарисовано, она, скорее всего, насытится через несколько минут работы. Чтобы предотвратить это насыщение, добавьте резистор параллельно конденсатору. Для наших целей нас не интересует насыщенность. Мы будем использовать интегратор с другими схемами для управления зарядом конденсатора.
Чтобы лучше понять интегратор, давайте рассмотрим типичное приложение. Интеграторы часто встречаются в усилителях звука высокого класса.
Интеграторы часто встречаются в усилителях звука высокого класса.
РИСУНОК 4.
В этом приложении они называются сервоприводами постоянного тока. Типичное применение показано на рис. 5 .
РИСУНОК 5.
Целью этой схемы является удаление нежелательного постоянного напряжения с выхода аудиоусилителя. Любое постоянное напряжение на выходе усилителя будет стремиться зарядить конденсатор интегратора. Затем интегратор изменяет смещение аудиоусилителя, чтобы удалить постоянную составляющую. Резистор и конденсатор подобраны так, чтобы схема не реагировала на звуковые частоты.
Также помните, что форма сигнала переменного тока симметрична. Часть выше 0 имеет тенденцию заряжать конденсатор, в то время как часть ниже разряжает конденсатор. Поэтому, когда вы интегрируете сигнал переменного тока в течение большого промежутка времени, вы получаете 0. Даже небольшое постоянное напряжение будет заряжать конденсатор в течение длительного периода времени, тем самым изменяя смещение усилителя.
Что такое производная?
Производная является мерой скорости изменения. Идеальный дифференциатор показан на рис. 5 9 .0231 . Эта схема похожа на фильтры верхних частот, которые вы видели на других схемах. Низкие частоты ослабляются, а высокие пропускаются. Математика, которая описывает дифференциатор:
V out = -RC * (скорость изменения)
Скорость изменения эквивалентна измерению наклона линии. Наклон — это мера изменения напряжения, деленная на изменение во времени. В математических терминах это называется дельта-напряжение по отношению к дельта-времени или просто dv/dt. Если мы применим линейное изменение к дифференциатору, мы получим постоянное выходное напряжение постоянного тока. Рисунок 6 иллюстрирует отношение ввода/вывода дифференциатора.
РИСУНОК 6.
Для упрощения математики допустим RC=1. От времени 0 до 2 напряжение изменяется на -4 вольта, а время изменяется на 2 секунды. Следовательно, наклон этой линии равен -2. Выход дифференциатора будет равен 2 — помните, что каскад инвертирующий.
Следовательно, наклон этой линии равен -2. Выход дифференциатора будет равен 2 — помните, что каскад инвертирующий.
Система сервопривода
Теперь, когда мы познакомились с терминами P, I и D, давайте рассмотрим, как они объединяются в полную систему. Мы будем использовать ПИД-регулятор для управления серводвигателем постоянного тока. Я использовал серводвигатель марки Hitec, который обычно используется в радиоуправляемых моделях автомобилей и самолетов. Этот сервопривод недорог и легко доступен. Вы также можете приобрести сменные шестерни — подробнее об этом в следующем выпуске!
Сервомеханизм состоит из нескольких компонентов, как показано на Фото 1 .
ФОТО 1.
У нас есть двигатель постоянного тока, набор шестерен и переменный резистор. Резистор прикреплен к последней шестерне. Этот переменный резистор используется для определения положения вращения двигателя.
Сервопривод выпотрошен. Я использовал только двигатель и переменный резистор, как показано на Фото 2 .
Я использовал только двигатель и переменный резистор, как показано на Фото 2 .
ФОТО 2.
Блок-схема ПИД-регулятора
Блок-схема, показывающая функциональные связи ПИД-регулятора, показана на рис. 7 .
РИСУНОК 7.
Прежде всего следует отметить, что это параллельный процесс. Условия P, I и D рассчитываются независимо, а затем добавляются к лету Σ. Входом в этот контур является заданное значение — в этом приложении оно может находиться в диапазоне от –12 до +12 В постоянного тока. Результатом является положение двигателя. Положение измеряется резистором и обратной связью как напряжение от –12 до 12 В постоянного тока. Теперь мы рассмотрим каждый из терминов PID независимо, чтобы увидеть, как они связаны. Для этого обсуждения предположим, что уставка равна 0 В постоянного тока.
В крайнем левом углу Рисунок 7 мы видим суммирующий узел. Разница между уставкой и обратной связью является ошибкой системы. Если измеренное положение двигателя положительное относительно того, где оно должно быть, ошибка будет отрицательной (т. е. требуется отрицательная коррекция). Аналогичным образом, если измеренное положение двигателя равно -1, ошибка будет положительной 1 (т. е. требуется положительная коррекция — помните, что уставка равна 0 В постоянного тока).
Разница между уставкой и обратной связью является ошибкой системы. Если измеренное положение двигателя положительное относительно того, где оно должно быть, ошибка будет отрицательной (т. е. требуется отрицательная коррекция). Аналогичным образом, если измеренное положение двигателя равно -1, ошибка будет положительной 1 (т. е. требуется положительная коррекция — помните, что уставка равна 0 В постоянного тока).
Ошибка умножается на усиление пропорционального блока. Обратите внимание, что на блок-диаграмме это показано как отрицательное усиление. Это было сделано для того, чтобы блок-схема и схема (представленная позже) согласовывались друг с другом. Выход пропорционального усилителя направляется на второй суммирующий узел, где снова меняется знак. Усилитель загружает ток сигнала и приводит в движение двигатель.
Эта цепочка получается довольно длинной, поэтому давайте суммируем пропорциональную операцию в нескольких простых предложениях:
- Ошибка должна присутствовать!
- Система попытается исправить ошибку, повернув двигатель в направлении, противоположном ошибке.

- Интенсивность коррекции определяется пропорциональным усилением. Если ошибки нет, пропорционального привода нет.
Переходим к интегралу. Интеграл — это устройство, которое заряжает конденсатор в течение определенного периода времени. Вспомните пример аудиоусилителя. В этом приложении интегратор накапливал выходной постоянный ток усилителя с течением времени. Затем он перенастроил усилитель, чтобы устранить ошибку по постоянному току. В цепи в Рисунок 7 интегратор выполняет ту же задачу. Это интеграция ошибки. Затем он подает корректирующий сигнал на двигатель. Мы можем резюмировать интегральное действие в нескольких предложениях:
- Ошибка должна присутствовать!
- В интегральной части накапливается ошибка. Небольшая ошибка может со временем стать большой коррекцией.
- По мере накопления ошибки двигатель принудительно исправляет ошибку.
- Наконец, интегратор превысит заданное значение. Он должен выдавать ошибку, противоположную исходной, чтобы разрядить конденсатор.
Конечная составляющая PID является производной. Напомним, что выходной сигнал дифференциатора был пропорционален наклону волны. В этой цепи происходит тот же тип действия. Когда двигатель начинает вращаться, напряжение, измеряемое резистором, будет увеличиваться или уменьшаться. Если у нас есть изменение напряжения в течение определенного периода времени, у нас есть рампа! Наклон этой рампы изменяется в зависимости от скорости двигателя. Если двигатель вращается быстро, крутизна будет высокой (т. е. напряжение быстро меняется в течение заданного промежутка времени). Следовательно, выход производной ступени будет высоким. Дифференциатор имеет следующие атрибуты:
- Двигатель должен работать!
- Дифференциатор будет иметь высокое выходное напряжение, когда двигатель движется быстро, и низкое напряжение, когда двигатель движется медленно.
- Этот сигнал применяется для замедления двигателя.
- Если двигатель не движется, выходное напряжение дифференциатора равно 0.
Соединения для дифференциатора отличаются от соединений пропорциональной и интегральной частей. Дифференциатор получает вход непосредственно от резистора. Поэтому он измеряет только скорость, с которой движется двигатель. Он не заботится о заданной точке. Это делается для предотвращения больших дифференциальных управляющих сигналов при изменении уставки. Опять же, дифференциатор реагирует только на скорость двигателя.
Схема
На рис. 8 показана упрощенная схема системы ПИД-регулирования серводвигателя. Рис. 8 Этот тип системы имеет преимущество в простоте настройки. Эта схема также проста и легка в построении.
Схема имеет ту же физическую структуру, что и блок-схема. Операционный усилитель U1 используется в качестве суммирующего узла для заданного значения и измеренного положения двигателя. Отдельные функции P, I и D реализуются U2, U3 и U4 соответственно. Наконец, операционный усилитель U5 суммирует отдельные члены ПИД-регулятора. Члены P и I меняются местами, а член D — нет. Транзисторы Дарлингтона были добавлены к U5 для увеличения тока до уровня, достаточного для привода двигателя.
Члены P и I меняются местами, а член D — нет. Транзисторы Дарлингтона были добавлены к U5 для увеличения тока до уровня, достаточного для привода двигателя.
Отдельные компоненты P, I и D выглядят так, как они были представлены ранее в этой статье. Каждый из членов имеет переменный резистор для регулировки коэффициента усиления. Регулировка (настройка) этой схемы является темой для следующего выпуска.
Выбор компонентов для этой схемы не имеет решающего значения. Переменные резисторы должны быть многооборотными для удобства регулировки. Можно использовать операционные усилители общего назначения; однако U3 должен быть входным типом FET. Конструкция полевого транзистора лучше подходит для интегратора, поскольку она не будет самозаряжать конденсатор интегратора. Я обнаружил, что счетверенный операционный усилитель, такой как LF347N, идеально подходит для этого приложения. Для интегратора и производных цепей требуются большие конденсаторы. Большие значения требуют использования электролитических конденсаторов.