Как работает асинхронный двигатель. Какие существуют способы регулировки его оборотов. Какие схемы регуляторов оборотов бывают. Как выбрать подходящий регулятор оборотов для асинхронного двигателя.
Устройство и принцип работы асинхронного двигателя
Асинхронный двигатель состоит из двух основных частей — статора и ротора. Статор представляет собой неподвижную часть с обмотками, создающими вращающееся магнитное поле. Ротор — это подвижная часть, вращающаяся внутри статора.
Существует два основных типа роторов асинхронных двигателей:
- Короткозамкнутый ротор — состоит из сердечника с залитыми в пазы алюминиевыми или медными стержнями, замкнутыми с торцов кольцами. Такая конструкция напоминает «беличье колесо».
- Фазный ротор — имеет обмотку, выполненную по типу обмотки статора. Концы обмотки выведены на контактные кольца.
Как работает асинхронный двигатель.
- При подаче переменного напряжения на обмотки статора создается вращающееся магнитное поле.
- Это поле пересекает проводники обмотки ротора и наводит в них ЭДС.
- По обмотке ротора начинает протекать ток.
- Взаимодействие тока ротора с магнитным полем статора создает вращающий момент.
- Под действием этого момента ротор начинает вращаться вслед за полем статора.
Важная особенность — ротор всегда вращается медленнее магнитного поля статора. Разность их скоростей называется скольжением. Именно из-за наличия скольжения двигатель называется асинхронным.
Способы регулирования оборотов асинхронного двигателя
Существует несколько основных способов изменения скорости вращения асинхронного двигателя:
1. Изменение частоты питающего напряжения
Это наиболее эффективный способ регулирования скорости в широком диапазоне. Частота вращения магнитного поля статора напрямую зависит от частоты питающего напряжения:
n = 60f / p
где n — скорость вращения магнитного поля, об/мин f — частота питающего напряжения, Гц p — число пар полюсов обмотки статора
Изменяя частоту с помощью преобразователя частоты, можно плавно регулировать скорость двигателя. При этом важно одновременно изменять и величину напряжения для поддержания постоянства магнитного потока.
2. Изменение числа пар полюсов
Этот способ позволяет получить несколько фиксированных скоростей вращения. Используются специальные многоскоростные двигатели с переключаемым числом пар полюсов обмотки статора. Недостаток — ступенчатое регулирование скорости.
3. Изменение напряжения питания статора
При снижении напряжения уменьшается магнитный поток и момент двигателя, что приводит к снижению скорости. Этот способ эффективен только для двигателей с вентиляторной нагрузкой. Диапазон регулирования ограничен.

4. Введение добавочного сопротивления в цепь ротора
Применяется только для двигателей с фазным ротором. Позволяет снизить скорость за счет увеличения скольжения. Недостаток — потери энергии в добавочных резисторах.
Схемы регуляторов оборотов асинхронного двигателя
Рассмотрим основные схемы, используемые для регулирования скорости асинхронных двигателей:
Тиристорный регулятор напряжения
Принцип действия основан на изменении действующего значения напряжения питания статора за счет регулирования угла открытия тиристоров. Схема содержит два встречно-параллельно включенных тиристора в каждой фазе питания двигателя:
- Преимущества: простота, низкая стоимость
- Недостатки: искажение формы тока, повышенные потери в двигателе, ограниченный диапазон регулирования
Преобразователь частоты
Позволяет плавно изменять частоту и амплитуду питающего напряжения. Состоит из выпрямителя, звена постоянного тока и инвертора на IGBT-транзисторах:
- Преимущества: широкий диапазон регулирования, высокий КПД, плавность
- Недостатки: высокая стоимость, сложность
Импульсный регулятор напряжения
Работает по принципу широтно-импульсной модуляции (ШИМ). Содержит силовые транзисторные ключи, коммутируемые с высокой частотой:
- Преимущества: простота, низкая стоимость
- Недостатки: применим только для маломощных двигателей
Как выбрать регулятор оборотов для асинхронного двигателя
При выборе регулятора оборотов следует учитывать следующие факторы:
- Мощность двигателя — регулятор должен быть рассчитан на соответствующую мощность.
- Диапазон регулирования — определяется требованиями технологического процесса.
- Точность поддержания скорости — зависит от применяемого алгоритма управления.
- Динамические характеристики — время разгона/торможения.
- Перегрузочная способность — возможность кратковременной работы с повышенным моментом.
- Условия эксплуатации — температура, влажность, вибрации.
- Наличие дополнительных функций — торможение, реверс и т.д.
Для большинства применений оптимальным выбором является современный преобразователь частоты. Он обеспечивает широкий диапазон регулирования с высокой точностью и экономичностью.
Преимущества и недостатки регулирования оборотов асинхронного двигателя
Регулирование скорости асинхронного двигателя имеет ряд преимуществ:
- Экономия электроэнергии за счет оптимизации режимов работы
- Повышение производительности технологических процессов
- Плавный пуск и останов, снижение пусковых токов
- Увеличение срока службы двигателя и механизмов
- Возможность автоматизации процессов
Однако есть и некоторые недостатки:
- Усложнение системы электропривода
- Повышение стоимости оборудования
- Необходимость квалифицированного обслуживания
- Возможное ухудшение электромагнитной совместимости
В большинстве случаев преимущества регулируемого электропривода перевешивают его недостатки, особенно для ответственных механизмов.
Перспективы развития регулируемого асинхронного электропривода
Основные тенденции в развитии систем регулирования скорости асинхронных двигателей:
- Совершенствование алгоритмов векторного управления
- Применение новых типов силовых полупроводниковых приборов (SiC, GaN)
- Интеграция функций защиты и диагностики
- Развитие систем бездатчикового управления
- Повышение энергоэффективности преобразователей
- Снижение массогабаритных показателей
- Расширение коммуникационных возможностей
Эти направления позволят создавать все более совершенные и экономичные системы регулируемого асинхронного электропривода для различных отраслей промышленности.
Справочные материалы о кондиционерах
Однофазные асинхронные двигатели питаются от обычной сети переменного напряжения 220 В.
Наиболее распространённая конструкция таких двигателей содержит две (или более) обмотки — рабочую и фазосдвигающую. Рабочая питается напрямую, а дополнительная через конденсатор, который сдвигает фазу на 90 градусов, что создаёт вращающееся магнитное поле. Поэтому такие двигатели ещё называют двухфазные или конденсаторные.
Регулировать скорость вращения таких двигателей необходимо, например, для:
- изменения расхода воздуха в системе вентиляции
- регулирования производительности насосов
- изменения скорости движущихся деталей, например в станках, конвеерах
В системах вентиляции это позволяет экономить электроэнергию, снизить уровень акустического шума установки, установить необходимую производительность.
Способы регулирования
Рассматривать механические способы изменения скорости вращения, например редукторы, муфты, шестерёнчатые трансмиссии мы не будем. Также не затронем способ изменения количества полюсов обмоток.
Также не затронем способ изменения количества полюсов обмоток.
Рассмотрим способы с изменением электрических параметров:
- изменение напряжения питания двигателя
- изменение частоты питающего напряжения
Регулирование напряжением
Регулирование скорости этим способом связано с изменением, так называемого, скольжения двигателя — разностью между скоростью вращения магнитного поля, создаваемого неподвижным статором двигателя и его движущимся ротором:
S=(n1-n2)/n2
n1 — скорость вращения магнитного поля
n2 — скорость вращения ротора
При этом обязательно выделяется энергия скольжения — из-за чего сильнее нагреваются обмотки двигателя.
Данный способ имеет небольшой диапазон регулирования, примерно 2:1, а также может осуществляться только вниз — то есть, снижением питающего напряжения.
При регулировании скорости таким способом необходимо устанавливать двигатели завышенной мощности.
Но несмотря на это, этот способ используется довольно часто для двигателей небольшой мощности с вентиляторной нагрузкой.
На практике для этого применяют различные схемы регуляторов.
Автотрансформаторное регулирование напряжения
Автотрансформатор — это обычный трансформатор, но с одной обмоткой и с отводами от части витков. При этом нет гальванической развязки от сети, но она в данном случае и не нужна, поэтому получается экономия из-за отсутствия вторичной обмотки.
На схеме изображён автотрансформатор T1, переключатель SW1, на который приходят отводы с разным напряжением, и двигатель М1.
Регулировка получается ступенчатой, обычно используют не более 5 ступеней регулирования.
Преимущества данной схемы:
- неискажённая форма выходного напряжения (чистая синусоида)
- хорошая перегрузочная способность трансформатора
Недостатки:
- большая масса и габариты трансформатора (зависят от мощности нагрузочного мотора)
- все недостатки присущие регулировке напряжением
Тиристорный регулятор оборотов двигателя
В данной схеме используются ключи — два тиристора, включённых встречно-параллельно (напряжение переменное, поэтому каждый тиристор пропускает свою полуволну напряжения) или симистор.
Схема управления регулирует момент открытия и закрытия тиристоров относительно фазового перехода через ноль, соответственно «отрезается» кусок вначале или, реже в конце волны напряжения.
Таким образом изменяется среднеквадратичное значение напряжения.
Данная схема довольно широко используется для регулирования активной нагрузки — ламп накаливания и всевозможных нагревательных приборов (так называемые диммеры).
Ещё один способ регулирования — пропуск полупериодов волны напряжения, но при частоте в сети 50 Гц для двигателя это будет заметно — шумы и рывки при работе.
Для управления двигателями регуляторы модифицируют из-за особенностей индуктивной нагрузки:
- устанавливают защитные LRC-цепи для защиты силового ключа (конденсаторы, резисторы, дроссели)
- добавляют на выходе конденсатор для корректировки формы волны напряжения
- ограничивают минимальную мощность регулирования напряжения — для гарантированного старта двигателя
- используют тиристоры с током в несколько раз превышающим ток электромотора
Достоинства тиристорных регуляторов:
- низкая стоимость
- малая масса и размеры
Недостатки:
- можно использовать для двигателей небольшой мощности
- при работе возможен шум, треск, рывки двигателя
- при использовании симисторов на двигатель попадает постоянное напряжение
- все недостатки регулирования напряжением
Стоит отметить, что в большинстве современных кондиционеров среднего и высшего уровня скорость вентилятора регулируется именно таким способом.
Транзисторный регулятор напряжения
Как называет его сам производитель — электронный автотрансформатор или ШИМ-регулятор.
Изменение напряжения осуществляется по принципу ШИМ (широтно-импульсная модуляция), а в выходном каскаде используются транзисторы — полевые или биполярные с изолированным затвором (IGBT).
Выходные транзисторы коммутируются с высокой частотой (около 50 кГц), если при этом изменить ширину импульсов и пауз между ними, то изменится и результирующее напряжение на нагрузке. Чем короче импульс и длиннее паузы между ними, тем меньше в итоге напряжение и подводимая мощность.
Для двигателя, на частоте в несколько десятков кГц, изменение ширины импульсов равносильно изменению напряжения.
Выходной каскад такой же как и у частотного преобразователя, только для одной фазы — диодный выпрямитель и два транзистора вместо шести, а схема управления изменяет выходное напряжение.
Плюсы электронного автотрансформатора:
- Небольшие габариты и масса прибора
- Невысокая стоимость
- Чистая, неискажённая форма выходного тока
- Отсутствует гул на низких оборотах
- Управление сигналом 0-10 Вольт
Слабые стороны:
- Расстояние от прибора до двигателя не более 5 метров (этот недостаток устраняется при использовании дистанционного регулятора)
- Все недостатки регулировки напряжением
Частотное регулирование
Ещё совсем недавно (10 лет назад) частотных регуляторов скорости двигателей на рынке было ограниченное количество, и стоили они довольно дорого.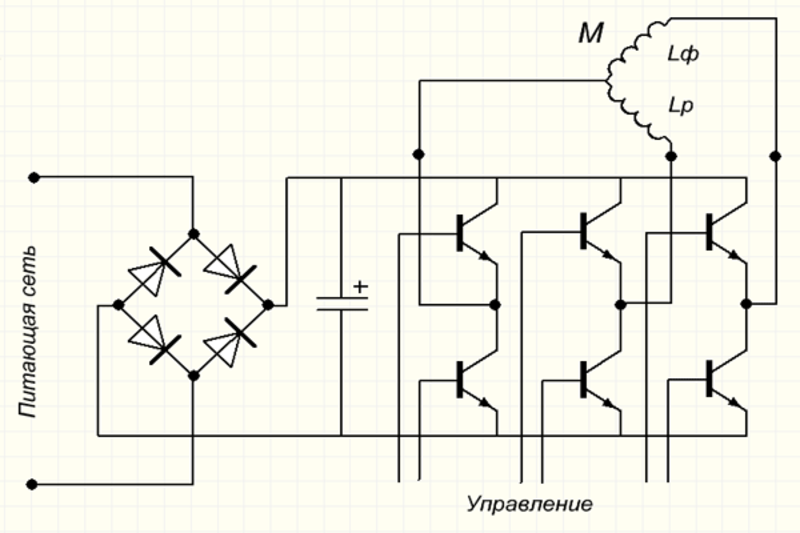 Причина — не было дешёвых силовых высоковольтных транзисторов и модулей.
Причина — не было дешёвых силовых высоковольтных транзисторов и модулей.
Но разработки в области твердотельной электроники позволили вывести на рынок силовые IGBT-модули. Как следствие — массовое появление на рынке инверторных кондиционеров, сварочных инверторов, преобразователей частоты.
На данный момент частотное преобразование — основной способ регулирования мощности, производительности, скорости всех устройств и механизмов приводом в которых является электродвигатель.
Однако, преобразователи частоты предназначены для управления трёхфазными электродвигателями.
Однофазные двигатели могут управляться:
- специализированными однофазными ПЧ
- трёхфазными ПЧ с исключением конденсатора
Преобразователи для однофазных двигателей
В настоящее время только один производитель заявляет о серийном выпуске специализированного ПЧ для конденсаторных двигателей — INVERTEK DRIVES.
Это модель Optidrive E2
Для стабильного запуска и работы двигателя используются специальные алгоритмы.
При этом регулировка частоты возможна и вверх, но в ограниченном диапазоне частот, этому мешает конденсатор установленный в цепи фазосдвигающей обмотки, так как его сопротивление напрямую зависит от частоты тока:
Xc=1/2πfC
f — частота тока
С — ёмкость конденсатора
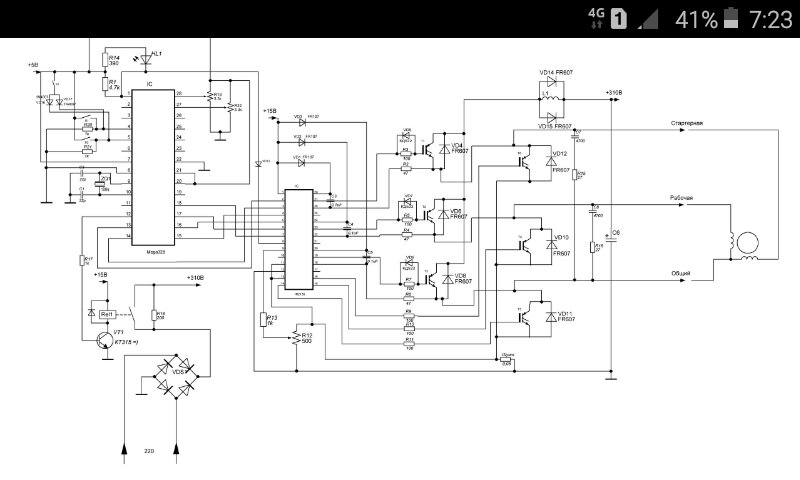
В выходном каскаде используется мостовая схема с четырьмя выходными IGBT транзисторами:
Optidrive E2 позволяет управлять двигателем без исключения из схемы конденсатора, то есть без изменения конструкции двигателя — в некоторых моделях это сделать довольно сложно.
Преимущества специализированного частотного преобразователя:
- интеллектуальное управление двигателем
- стабильно устойчивая работа двигателя
- огромные возможности современных ПЧ:
- возможность управлять работой двигателя для поддержания определённых характеристик (давления воды, расхода воздуха, скорости при изменяющейся нагрузке)
- многочисленные защиты (двигателя и самого прибора)
- входы для датчиков (цифровые и аналоговые)
- различные выходы
- коммуникационный интерфейс (для управления, мониторинга)
- предустановленные скорости
- ПИД-регулятор
Минусы использования однофазного ПЧ:
- ограниченное управление частотой
- высокая стоимость
Использование ЧП для трёхфазных двигателей
Стандартный частотник имеет на выходе трёхфазное напряжение. При подключении к ему однофазного двигателя из него извлекают конденсатор и соединяют по приведённой ниже схеме:
При подключении к ему однофазного двигателя из него извлекают конденсатор и соединяют по приведённой ниже схеме:
Геометрическое расположение обмоток друг относительно друга в статоре асинхронного двигателя составляет 90°:
Фазовый сдвиг трёхфазного напряжения -120°, как следствие этого — магнитное поле будет не круговое , а пульсирующее и его уровень будет меньше чем при питании со сдвигом в 90°.
В некоторых конденсаторных двигателях дополнительная обмотка выполняется более тонким проводом и соответственно имеет более высокое сопротивление.
При работе без конденсатора это приведёт к:
- более сильному нагреву обмотки (срок службы сокращается, возможны кз и межвитковые замыкания)
- разному току в обмотках
Многие ПЧ имеют защиту от асимметрии токов в обмотках, при невозможности отключить эту функцию в приборе работа по данной схеме будет невозможна
Преимущества:
- более низкая стоимость по сравнению со специализированными ПЧ
- огромный выбор по мощности и производителям
- более широкий диапазон регулирования частоты
- все преимущества ПЧ (входы/выходы, интеллектуальные алгоритмы работы, коммуникационные интерфейсы)
Недостатки метода:
- необходимость предварительного подбора ПЧ и двигателя для совместной работы
- пульсирующий и пониженный момент
- повышенный нагрев
- отсутствие гарантии при выходе из строя, т.
 к. трёхфазные ПЧ не предназначены для работы с однофазными двигателями
к. трёхфазные ПЧ не предназначены для работы с однофазными двигателями
изменение скорости вращения и схемы на тиристорах • Мир электрики
Содержание
- Общие сведения
- Короткозамкнутый и фазный роторы
- Конструктивные особенности
- Принцип работы
- Методы настройки оборотов
- Виды и критерии выбора
- Устройство на тиристорах
- Транзисторный тип
- Регулирование за счет частоты
- Изготовление своими руками
При пуске электродвигателя происходит превышение потребления тока в 7 раз, что способствует преждевременному выходу из строя электрической и механической частей мотора. Для предотвращения этого следует применять регулятор оборотов электродвигателя. Существует много моделей заводского плана, но для того чтобы сделать такое устройство самостоятельно, необходимо знать принцип действия электродвигателя и способы регулирования оборотов ротора.
Общие сведения
Электродвигатели переменного тока получили широкое распространение во многих сферах жизнедеятельности человека, а именно — модели асинхронного типа. Основное назначение двигателя как электрической машины — трансформация электрической энергии в механическую. Асинхронный в переводе означает неодновременный, так как частота вращения ротора отличается от частоты переменного напряжения (U) в статоре. Существует две разновидности асинхронных двигателей по типу питания:
Основное назначение двигателя как электрической машины — трансформация электрической энергии в механическую. Асинхронный в переводе означает неодновременный, так как частота вращения ротора отличается от частоты переменного напряжения (U) в статоре. Существует две разновидности асинхронных двигателей по типу питания:
- Однофазные.
- Трехфазные.
Однофазные применяются для домашних бытовых нужд, а трехфазные используются на производстве. В трехфазных асинхронных двигателях (далее ТАД) используются два вида роторов:
- замкнутые;
- фазные.
Замкнутые составляют около 95% от всех применяемых двигателей и обладают значительной мощностью (от 250 Вт и выше). Фазный тип конструктивно отличается от АД, но применяется достаточно редко по сравнению с первым. Ротор представляет собой стальную фигуру цилиндрической формы, которая помещается внутрь статора, причем на его поверхность напрессован сердечник.
Короткозамкнутый и фазный роторы
Впаянные или залитые в поверхность сердечника и накоротко замкнутые с торцов двумя кольцами высокопроводящие медные (для машин большой мощности) или алюминиевые стержни (для машин меньшей мощности) играют роль электромагнитов с полюсами, обращенными к статору.
Стержни обмотки не имеют какой-либо изоляции, так как напряжение в такой обмотке нулевое.
Более часто используемый для стержней двигателей средней мощности алюминий отличается малой плотностью и высокой электропроводностью.
Для уменьшения высших гармоник электродвижущей силы (ЭДС) и исключения пульсации магнитного поля стержни ротора имеют определенным образом рассчитанный угол наклона относительно оси вращения. Если используется электромотор маленькой мощности, то пазы представляют собой закрытые конструкции, которые отделяют ротор от зазора с целью увеличения индуктивной составляющей сопротивления.
Ротор в виде фазного исполнения или типа характеризуются обмоткой, концы ее соединены по типу «звезда» и присоединены к контактным кольцам (на валу), по которым скользят графитовые щетки. Для устранения вихревых токов поверхность обмоток покрывается оксидной пленкой. Кроме того, в цепь обмотки ротора добавляется резистор, позволяющий изменять активное сопротивление (R) роторной цепи для уменьшения значений пусковых токов (Iп). Пусковые токи отрицательно влияют на электрическую и механическую части электромотора. Переменные резисторы, используемые для регулирования Iп:
Кроме того, в цепь обмотки ротора добавляется резистор, позволяющий изменять активное сопротивление (R) роторной цепи для уменьшения значений пусковых токов (Iп). Пусковые токи отрицательно влияют на электрическую и механическую части электромотора. Переменные резисторы, используемые для регулирования Iп:
- Металлические или ступенчатые с ручным переключением.
- Жидкостные (за счет погружения на глубину электродов).
Щетки, выполненные из графита, изнашиваются, и некоторые модели оборудованы короткозамкнутым конструктивным исполнением, которое поднимает щетки и замыкает кольца после запуска мотора. АД с фазным ротором являются более гибкими в плане регулирования Iп.
Конструктивные особенности
Асинхронный двигатель не имеет выраженных полюсов в отличие от электромотора постоянного тока. Число полюсов определяется количеством катушек в обмотках неподвижной части (статор) и способом соединения. В асинхронной машине с 4-мя катушками проходит магнитный поток. Статор выполняется из листов спецстали (электротехническая сталь), сводящих к нулю вихревые токи, при которых происходит значительный нагрев обмоток. Он приводит к массовому межвитковому замыканию.
Статор выполняется из листов спецстали (электротехническая сталь), сводящих к нулю вихревые токи, при которых происходит значительный нагрев обмоток. Он приводит к массовому межвитковому замыканию.
Железняк или сердечник ротора напрессовывается непосредственно на вал. Между ротором и статором существует минимальный воздушный зазор. Обмотка ротора выполняется в виде «беличьей клетки» и сделана из медных или алюминиевых стержней.
В электромоторах мощностью до 100 кВт применяется алюминий, обладающий незначительной плотностью — для заливки в пазы сердечника ротора. Но несмотря на такое устройство, двигатели этого типа греются. Для решения этой проблемы используются вентиляторы для принудительного охлаждения, которые насаживаются на вал. Эти двигатели просты и надежны. Однако двигатели потребляют при пуске большой ток, в 7 раз больше номинального. Из-за этого они имеют низкий пусковой момент, так как большая часть энергии электричества идет на нагрев обмоток.
Электромоторы, у которых повышенный момент пуска, отличаются от обыкновенных асинхронных конструкцией ротора. Ротор изготавливается в виде двойной «беличьей клетки». Эти модели имеют сходство с фазными типами изготовления ротора. Он состоит из внутренней и наружной «беличьих клеток», причем наружная является пусковой и обладает большим активным и малым реактивным R. Наружная обладает незначительным активным и высоким реактивным R. При увеличении частоты вращения I переключается на внутреннюю клетку и работает в виде короткозамкнутого ротора.
Принцип работы
При протекании I по статорной обмотке в каждой из них создается магнитный поток (Ф). Эти Ф сдвинуты на 120 градусов относительно друг друга. Полученный Ф является вращающимся, создающим электродвижущую силу (ЭДС) в алюминиевых или медных проводниках. В результате этого и создается пусковой магнитный момент электромотора, и ротор начинает вращаться. Этот процесс называется еще в некоторых источниках скольжением (S), показывающим разность частоты n1 электромагнитного поля стартера, которое становится больше, чем частота, полученная при вращении ротора n2. Вычисляется в процентах и имеет вид: S = ((n1-n2)/n1) * 100%.
Значение S при начальном старте электромотора равно примерно 1, но при возрастании значений n2 становится меньше. В этот момент I в роторе уменьшается, следовательно, и ЭДС становится меньше номиналом. При холостом ходе S минимально, но при увеличении момента статического взаимодействия ротора и статора эта величина достигает критического значения. Если выполняется неравенство: S > Sкр, то мотор работает нормально, однако при превышении значения Sкр он может «опрокинуться». Опрокидывание вызывает нестабильную работу, но с течением времени исчезает.
Методы настройки оборотов
Для предотвращения отрицательного влияния во время пуска нужно уменьшить обороты электродвигателя 220 в или 380 в. Существует несколько способов достижения этой цели:
- Изменение значения R цепи ротора.
- Изменение U в обмотке статора.
- Изменение частоты U.
- Переключение полюсов.
При изменении значения R роторной части при помощи дополнительных резисторов приводит к снижению частоты вращения, но в результате этого уменьшается мощность.
Следовательно, получается значительная потеря электроэнергии. Этот тип регулирования следует применять для фазного ротора.
При изменении значений U на статорной катушке возможно механическое или электрическое управление частотой вращения ротора. В этом случае используется регулятор U. Использование такого способа позволяет применять его только при вентиляторном характере нагрузки (например, регулятор оборотов вентилятора 220в). Для всех остальных случаев применяют трехфазные автоматические трансформаторы, позволяющие плавно изменять значения U, или тиристорные регуляторы.
Исходя из формулы зависимости частоты вращения от частоты питающего U можно производить регулирование количества оборотов ротора. Частота вращающегося магнитного поля статора вычисляется по формуле: Nст = 60 * f /p (f — частота тока питающей сети, p — число пар полюсов).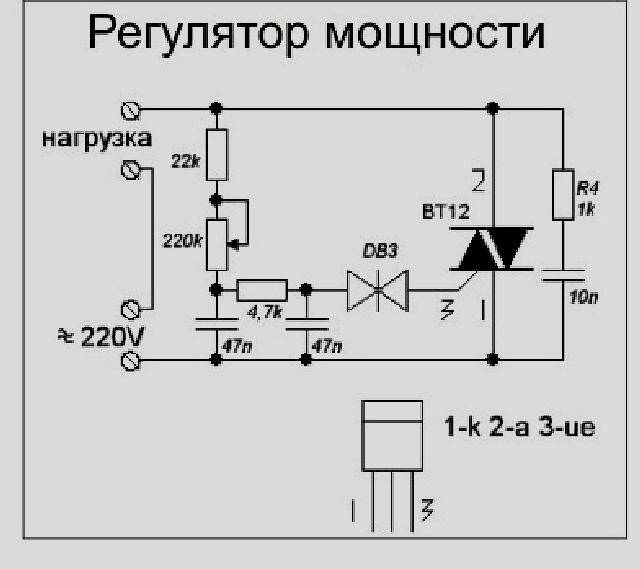 Этот способ обеспечивает возможность плавного регулирования частоты вращения роторной части. Для получения высокого коэффициента полезного действия нужно изменять частоту и U. Этот способ является оптимальным для двигателей с короткозамкнутым ротором, так как потери мощности минимальны. Существует два метода изменения количества пар полюсов:
Этот способ обеспечивает возможность плавного регулирования частоты вращения роторной части. Для получения высокого коэффициента полезного действия нужно изменять частоту и U. Этот способ является оптимальным для двигателей с короткозамкнутым ротором, так как потери мощности минимальны. Существует два метода изменения количества пар полюсов:
- В статор (в пазы) нужно уложить 2 обмотки с различным числом p.
- Обмотка состоит из двух частей, соединенных параллельно или последовательно.
Основным недостатком этого метода является поддержание ступенчатого характера изменения частоты электромотора с короткозамкнутым ротором.
Виды и критерии выбора
Для выбора регулятора нужно руководствоваться определенными характеристиками для конкретного случая. Среди всех критериев можно выбрать следующие:
- По типу управления. Для двигателей коллекторного типа применяются регуляторы с векторной или скалярной системой управления.
- Мощность является основным параметром, от которого нужно отталкиваться.

- По диапазону U.
- По диапазону частот. Нужно выбирать модель, которая соответствует требованиям пользователя для конкретного случая.
- Прочие характеристики, в которые включены гарантия, габариты, комплектация.
Кроме того, регулятор подбирается мощнее, чем сам электродвигатель по формуле: Pрег = 1,3 * Pдвиг (Pрег, Pдвиг — мощность регулятора и двигателя соответственно). Его нужно выбирать на разные диапазоны U, так как универсальность играет важную роль.
Устройство на тиристорах
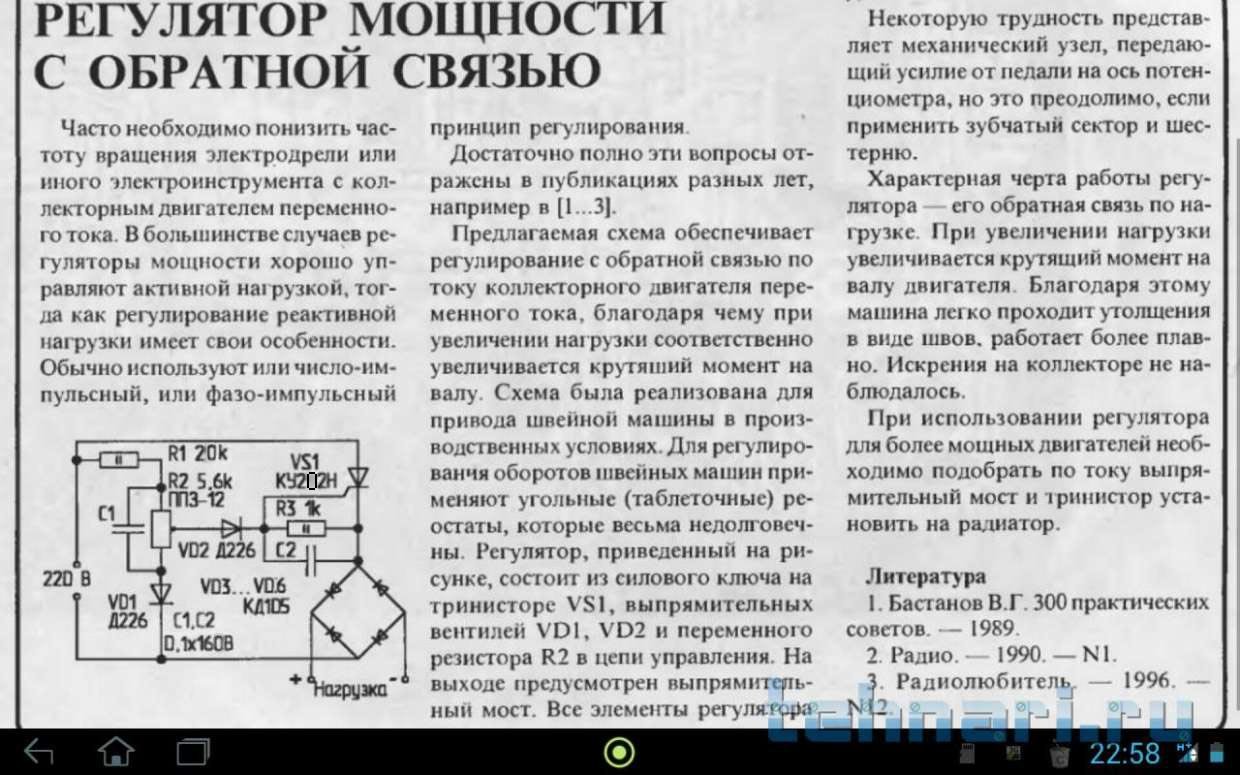
В этой модели, представленной на схеме 1, применяются 2 тиристора, включенных встречно-параллельно, хотя их можно заменить одним симистором.
Схема 1 — Тиристорная регулировка оборотов коллекторного двигателя без потери мощности.
Эта схема производит регулирование с помощью открытия или закрытия тиристоров (симистора) при фазовом переходе через нейтраль. Для корректного управления коллекторным двигателем применяют следующие способы модификации схемы 1:
- Установка защитных LRC-цепей, состоящих из конденсаторов, резисторов и дросселей.

- Добавление на входе емкости.
- Использование тиристоров или симистора, ток которых превышает номинальное значение силы тока двигателя в диапазоне от 3..8 раз.
Этот тип регуляторов имеет достоинства и недостатки. К первым относятся низкая стоимость, маленький вес и габариты. Ко вторым следует отнести следующие:
- применение для моторов небольшой мощности;
- происходит шум и рывки мотора;
- при использовании схемы на симисторах происходит попадание постоянного U на двигатель.
Этот тип регулятора ставится в вентиляторы, кондиционеры, стиральные машины и электродрели . Отлично выполняет свои функции, несмотря на недостатки.
Транзисторный тип
Еще одним названием регулятора транзисторного типа является автотрансформатор или ШИМ-регулятор (схема 2). Он изменяет номинал U по принципу широтно-импульсной модуляции (ШИМ) при помощи выходного каскада, в котором применяются транзисторы типа IGBT.
Схема 2 — Транзисторный ШИМ-регулятор оборотов.
Коммутация транзисторов происходит с высокой частотой и благодаря этому можно изменить ширину импульсов. Следовательно, при этом изменится и значение U. Чем длиннее импульс и короче паузы, тем выше значение U и наоборот. Положительные аспекты применения этой разновидности следующие:
- Незначительный вес прибора при низких габаритах.
- Довольно низкая стоимость.
- При низких оборотах отсутствие шума.
- Управление за счет низких значений U (0..12 В).
Основной недостаток применения заключается в том, что расстояние до электромотора должно быть не более 4 метров.
Регулирование за счет частоты
Регулирование оборотов моторов различных типов за счет частоты получило широкое применение. Частотное преобразование занимает лидирующую позицию на рынке сбыта устройств-регуляторов оборотов и осуществления плавного пуска. Благодаря своей универсальности возможно влиять на мощность, производительность и скорость любого устройства с электродвигателем. Эти устройства применяются для однофазных и трехфазных двигателей. Применяются такие виды частотных преобразователей:
Эти устройства применяются для однофазных и трехфазных двигателей. Применяются такие виды частотных преобразователей:
- Специализированные однофазные.
- Трехфазные без конденсатора.
Для регулирования оборотов используется конденсатор, включенный с обмотками однофазного двигателя (схема 3). Этот преобразователь частоты (ПЧ) имеет емкостное R, которое зависит от частоты протекающего переменного тока. Выходной каскад такого ПЧ выполнен на IGBT-транзисторах.
Схема 3 — Частотный регулятор оборотов.
У специализированного ПЧ есть свои преимущества и недостатки. Преимуществами являются следующие:
- Управление АД без участия человека.
- Стабильность.
- Дополнительные возможности.
Существует возможность управлять работой электромотора при определенных условиях, а также защита от перегрузок и токов КЗ. Кроме того, возможно расширять функционал при помощи подключения цифровых датчиков, мониторинга параметров работы и использования PID-регулятора. К минусам можно отнести ограничения при управлении частотой и довольно высокую стоимость.
К минусам можно отнести ограничения при управлении частотой и довольно высокую стоимость.
Для трехфазных АД применяются также устройства регулирования частоты (схема 4). Регулятор имеет на выходе три фазы для подключения электромотора.
Схема 4 — ПЧ для трехфазного двигателя.
У этого варианта тоже есть свои сильные и слабые стороны. К первым можно отнести следующие: низкую стоимость, выбор мощности, широкий диапазон частотной регуляции, а также все преимущества однофазных преобразователей частоты. Среди всех отрицательных сторон можно выделить основные: предварительный подбор и нагрев при пуске.
Изготовление своими руками
Если нет возможности, а также желания приобретать регулятор заводского типа, то можно собрать его своими руками. Хотя регуляторы типа » tda1085 » зарекомендовали себя очень хорошо. Для этого нужно детально ознакомиться с теорией и приступить к практике. Очень популярны схемы симисторного исполнения, в частности регулятор оборотов асинхронного двигателя 220в (схема 5). Сделать его несложно. Он собирается на симисторе ВТ138, хорошо подходящем для этих целей.
Сделать его несложно. Он собирается на симисторе ВТ138, хорошо подходящем для этих целей.
Схема 5 — Простой регулятор оборотов на симисторе.
Этот регулятор может быть использован и для регулировки оборотов двигателя постоянного тока 12 вольт, так как является довольно простым и универсальным. Обороты регулируются благодаря изменению параметров Р1, определяющему фазу входящего сигнала, который открывает переход симистора.
Принцип работы прост. При запуске двигателя происходит его затормаживание, индуктивность изменятся в меньшую сторону и способствует увеличению U в цепи «R2—>P1—>C2». При разряде С2 симистор открывается в течение некоторого времени.
Существует еще одна схема. Она работает немного по-другому: путем обеспечения хода энергии обратного типа, которое является оптимально выгодным. В схему включен довольно мощный тиристор.
Схема 6 — Устройство тиристорного регулятора.
Схема состоит из генератора сигнала управления, усилителя, тиристора и участка цепи, выполняющего функции стабилизатора вращения ротора.
Наиболее универсальной схемой является регулятор на симисторе и динисторе (схема 7). Он способен плавно убавить скорость вращения вала, задать реверс двигателю (изменить направление вращения) и понизить пусковой ток.
Принцип работы схемы:
- С1 заряжается до U пробоя динистора D1 через R2.
- D1 при пробитии открывает переход симистора D2, который отвечает за управление нагрузкой.
Напряжение при нагрузке прямо пропорционально зависит от частотной составляющей при открытии D2, зависящего от R2. Схема применяется в пылесосах. Она содержит универсальное электронное управление, а также способность простого подключения питания 380 В. Все детали следует расположить на печатной плате, изготовленной по лазерно-утюжной технологии (ЛУТ). Подробно с этой технологии изготовления плат можно ознакомиться в интернете.
Таким образом, при выборе регулятора оборотов электродвигателя возможна покупка заводского или изготовление своими руками. Самодельный регулятор сделать достаточно просто, так как при понимании принципа действия устройства можно с легкостью собрать его. Кроме того, следует соблюдать правила безопасности при осуществлении монтажа деталей и при работе с электричеством.
Кроме того, следует соблюдать правила безопасности при осуществлении монтажа деталей и при работе с электричеством.
Методы управления скоростью асинхронного двигателя
Асинхронный двигатель практически является двигателем с постоянной скоростью, это означает, что для всего диапазона нагрузки изменение скорости двигателя довольно мало. Скорость шунтирующего двигателя постоянного тока можно очень легко изменять с хорошим КПД, но в случае асинхронных двигателей снижение скорости сопровождается соответствующей потерей эффективности и плохим коэффициентом мощности. Поскольку асинхронные двигатели широко используются, их регулирование скорости может потребоваться во многих приложениях. Ниже описаны различные методы управления скоростью асинхронного двигателя .Регулятор скорости асинхронного двигателя со стороны статора
1. Изменением приложенного напряжения:
Из уравнения крутящего момента асинхронного двигателя, Сопротивление ротора R 2 постоянно и если скольжение s мало, то (sX 2 ) 2 настолько мало, что им можно пренебречь. Следовательно, T ∝ sE 2 2 , где E 2 — ЭДС ротора, а E 2 ∝ В
Следовательно, T ∝ sE 2 2 , где E 2 — ЭДС ротора, а E 2 ∝ В Таким образом, T ∝ sV 2 , а значит, при уменьшении подаваемого напряжения развиваемый момент уменьшается. Следовательно, для обеспечения одного и того же момента нагрузки скольжение увеличивается с уменьшением напряжения и, следовательно, скорость уменьшается. Этот метод является самым простым и дешевым, но до сих пор применяется редко, т. к. для относительно небольшого изменения скорости требуется большое изменение напряжения питания.
2. При изменении приложенной частоты
Синхронная скорость вращающегося магнитного поля асинхронного двигателя определяется выражением где, f = частота питания и P = количество полюсов статора.Следовательно, синхронная скорость изменяется при изменении частоты питания.
 Фактическая скорость асинхронного двигателя определяется как N = Ns (1 — s) . Однако этот метод не получил широкого распространения. Его можно использовать там, где асинхронный двигатель питается от специального генератора (так что частоту можно легко изменять, изменяя скорость первичного двигателя). Кроме того, при более низкой частоте ток двигателя может стать слишком большим из-за уменьшения реактивного сопротивления. И если частота увеличивается сверх номинального значения, максимальный развиваемый крутящий момент падает, а скорость увеличивается.
Фактическая скорость асинхронного двигателя определяется как N = Ns (1 — s) . Однако этот метод не получил широкого распространения. Его можно использовать там, где асинхронный двигатель питается от специального генератора (так что частоту можно легко изменять, изменяя скорость первичного двигателя). Кроме того, при более низкой частоте ток двигателя может стать слишком большим из-за уменьшения реактивного сопротивления. И если частота увеличивается сверх номинального значения, максимальный развиваемый крутящий момент падает, а скорость увеличивается.3. Постоянная V/F-регулировка асинхронного двигателя
Это наиболее популярный метод управления скоростью асинхронного двигателя. Как и в описанном выше методе, если частота питания снижается при сохранении номинального напряжения питания, поток в воздушном зазоре будет стремиться к насыщению. Это вызовет чрезмерный ток статора и искажение волны потока статора. Следовательно, напряжение статора также должно быть уменьшено пропорционально частоте, чтобы поддерживать постоянный поток в воздушном зазоре.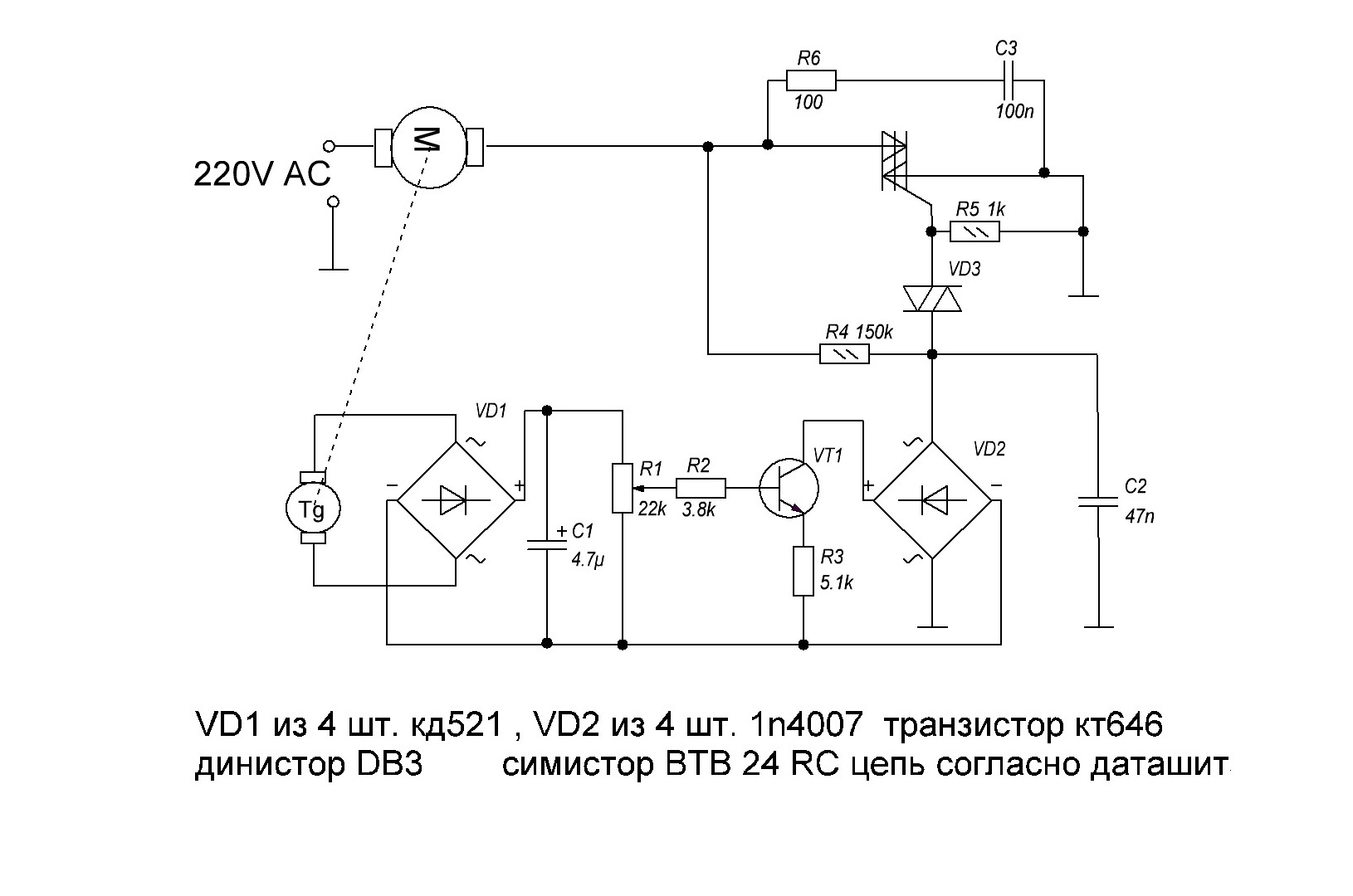 Величина потока статора пропорциональна соотношению напряжения статора и частоты. Следовательно, если отношение напряжения к частоте поддерживается постоянным, поток остается постоянным. Кроме того, при сохранении постоянной V/F развиваемый крутящий момент остается примерно постоянным. Этот метод дает более высокую эффективность во время выполнения. Поэтому в большинстве приводов переменного тока для управления скоростью используется метод постоянного напряжения/частоты (или метод переменного напряжения и переменной частоты). Наряду с широким диапазоном регулирования скорости этот метод также предлагает возможность «мягкого пуска».
Величина потока статора пропорциональна соотношению напряжения статора и частоты. Следовательно, если отношение напряжения к частоте поддерживается постоянным, поток остается постоянным. Кроме того, при сохранении постоянной V/F развиваемый крутящий момент остается примерно постоянным. Этот метод дает более высокую эффективность во время выполнения. Поэтому в большинстве приводов переменного тока для управления скоростью используется метод постоянного напряжения/частоты (или метод переменного напряжения и переменной частоты). Наряду с широким диапазоном регулирования скорости этот метод также предлагает возможность «мягкого пуска».4. Изменение количества полюсов статора
Из приведенного выше уравнения синхронной скорости видно, что синхронную скорость (и, следовательно, рабочую скорость) можно изменить, изменив количество полюсов статора. Этот метод обычно используется для асинхронных двигателей с короткозамкнутым ротором, поскольку ротор с короткозамкнутым ротором адаптируется к любому количеству полюсов статора. Смена полюсов статора достигается за счет наматывания двух или более независимых статорных обмоток на разное число полюсов в одних и тех же пазах.
Смена полюсов статора достигается за счет наматывания двух или более независимых статорных обмоток на разное число полюсов в одних и тех же пазах. Например, статор намотан двумя трехфазными обмотками, одна на 4 полюса, а другая на 6 полюсов.
для частоты питания 50 Гц
i) синхронная скорость при подключении 4-полюсной обмотки, Ns = 120*50/4 = 1500 об/мин
ii) синхронная скорость при подключении 6-полюсной обмотки, Ns = 120*50/6 = 1000 об/мин
Регулятор скорости со стороны ротора:
1. Управление реостатом ротора
Этот метод подобен способу управления якорным реостатом шунтового двигателя постоянного тока. Но этот метод применим только к двигателям с контактными кольцами, так как добавление внешнего сопротивления в ротор двигателей с короткозамкнутым ротором невозможно.2. Каскадный режим
В этом методе управления скоростью используются два двигателя. Оба установлены на одном валу, поэтому оба работают с одинаковой скоростью. Один двигатель питается от трехфазного источника питания, а другой двигатель питается от ЭДС индукции в первом двигателе через токосъемные кольца. Расположение показано на следующем рисунке. Двигатель А называется основным, а двигатель В — вспомогательным.
Расположение показано на следующем рисунке. Двигатель А называется основным, а двигатель В — вспомогательным. Пусть, N с1 = частота двигателя A
N с2 = частота двигателя B
P 1 = количество полюсов статора двигателя A
P 2 = количество полюсов статора двигателя B поставка
Теперь, промах двигателя A, S 1 = (N с1 — N) / N с1 .
частота ЭДС ротора в двигателе А, f 1 = S 1 f
Теперь на вспомогательный двигатель B подается ЭДС ротора
поэтому, N s2 = (120f 1 ) / P 2 = (120S 1 f) / P 2 .
Теперь введите значение S 1 = (N s1 — N) / N s1
т.е. N = N s2 .
из приведенных выше уравнений можно получить, что С помощью этого метода можно получить четыре различных скорости
1.
 когда работает только двигатель А, соответствующая скорость = .Ns1 = 120f / P 1
когда работает только двигатель А, соответствующая скорость = .Ns1 = 120f / P 1 2. когда работает только двигатель B, соответствующая скорость = Ns2 = 120f / P 2
3. если выполняется накопительное каскадирование, скорость установки = N = 120f / (P 1 + P 2 )
4. если выполнено дифференциальное каскадирование, скорость установки = N = 120f (P 1 — P 2 )
3. Вводом ЭДС в цепь ротора
В этом методе скорость асинхронного двигателя регулируется путем подачи напряжения в цепь ротора. Необходимо, чтобы подаваемое напряжение (ЭДС) имело ту же частоту, что и частота скольжения. Однако ограничений на фазу инжектируемой ЭДС нет. Если мы введем ЭДС, которая находится в противофазе с ЭДС, индуцированной ротором, сопротивление ротора будет увеличено. Если мы введем ЭДС, которая находится в фазе с ЭДС, индуцированной ротором, сопротивление ротора уменьшится. Таким образом, изменяя фазу инжектируемой ЭДС, можно управлять скоростью. Основное преимущество этого метода заключается в том, что может быть достигнут широкий диапазон регулирования скорости (как выше нормы, так и ниже нормы). ЭДС может вводиться различными методами, такими как система Крамера, система Шербиуса и т. д.
Основное преимущество этого метода заключается в том, что может быть достигнут широкий диапазон регулирования скорости (как выше нормы, так и ниже нормы). ЭДС может вводиться различными методами, такими как система Крамера, система Шербиуса и т. д.ЧРП или симистор для асинхронных двигателей переменного тока?
Когда на асинхронный двигатель переменного тока подается напряжение, он работает с определенной скоростью. Требования к переменной скорости для асинхронных двигателей переменного тока обычно выполняются с помощью трехфазного двигателя и инвертора или частотно-регулируемого привода. Этот пост в блоге также представляет еще один вариант.
Во-первых, давайте поговорим о наиболее распространенном методе управления скоростью асинхронных двигателей переменного тока, которым является инвертор или частотно-регулируемый привод (ЧРП). Я больше всего знаком с серией Fuji Electric FRENIC Mini C2.
ЧРП Fuji Electric FRENIC Mini серии C2
Как это устройство управляет скоростью двигателя переменного тока? Давайте сначала поймем, почему двигатель будет работать с определенной скоростью.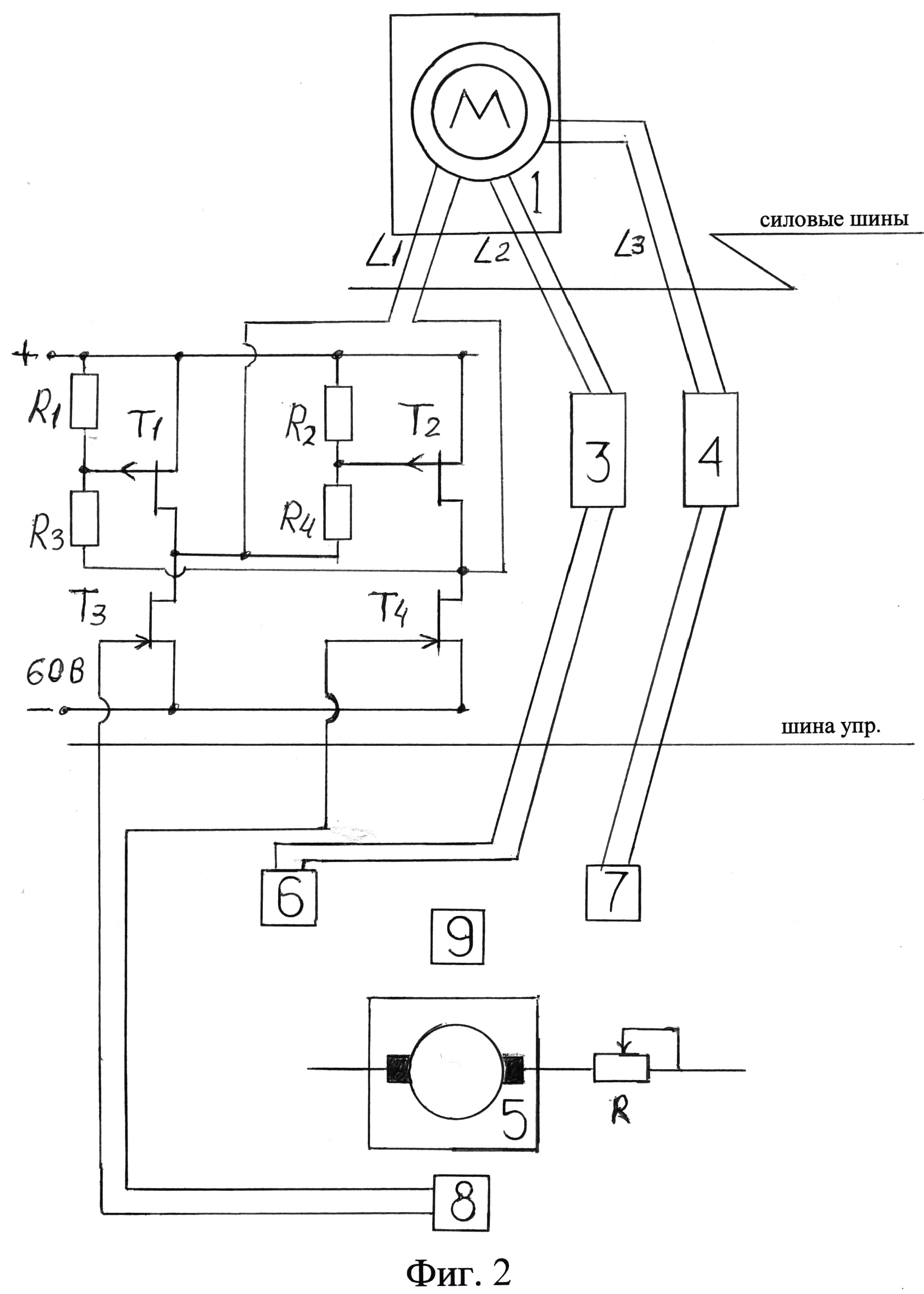 С математической точки зрения синхронная скорость двигателя рассчитывается по формуле:
С математической точки зрения синхронная скорость двигателя рассчитывается по формуле:
Большинство промышленных асинхронных двигателей переменного тока имеют 4 полюса, поэтому скорость двигателя синхронизируется с частотой входного питания (Гц). При частоте 60 Гц двигатель будет работать со скоростью 1800 об/мин.
Преобразователь частоты управляет скоростью двигателя с помощью ШИМ (широтно-импульсной модуляции) для изменения частоты источника питания, подаваемого на двигатель. Обычно от двигателя не поступает обратной связи; хотя некоторые приводы используют обратную ЭДС в качестве обратной связи.
Вот блок-схема логики управления частотно-регулируемым приводом FRENIC Mini C2 (из руководства). Обратите внимание на его сложность только из-за огромного количества компонентов. Такие функции, как динамическое увеличение крутящего момента или управление компенсацией скольжения, обычно предлагаются для повышения производительности.
Один из недостатков использования частотно-регулируемых приводов заключается в том, что они могут стать дорогими и сложными для измерения. Также требуется 3-фазный асинхронный двигатель переменного тока с номинальным режимом работы инвертора или, по крайней мере, с режимом непрерывного режима работы. Если двигатель оснащен тормозным механизмом, он обычно снижает рабочий цикл. Раньше я видел на рынке частотно-регулируемые приводы для однофазных двигателей, но их трудно найти, и мы никогда не тестировали их с нашими двигателями.
Также требуется 3-фазный асинхронный двигатель переменного тока с номинальным режимом работы инвертора или, по крайней мере, с режимом непрерывного режима работы. Если двигатель оснащен тормозным механизмом, он обычно снижает рабочий цикл. Раньше я видел на рынке частотно-регулируемые приводы для однофазных двигателей, но их трудно найти, и мы никогда не тестировали их с нашими двигателями.
Другой способ управления скоростью однофазных асинхронных двигателей переменного тока?
Теперь рассмотрим еще один метод управления скоростью. Взгляните на кривую скорости крутящего момента однофазного асинхронного двигателя переменного тока, которая описывает, что двигатель будет делать после включения. Двигатель запустится со скоростью 0 об/мин, затем разгонится до номинальной скорости. Обратите внимание, как входное напряжение влияет на форму кривой скорости-крутящего момента. Если момент нагрузки остается прежним, а входное напряжение уменьшается со 100 В до 90 В, скорость двигателя снижается. Да, можно использовать напряжение для управления скоростью двигателя переменного тока .
Да, можно использовать напряжение для управления скоростью двигателя переменного тока .
ПРИМЕЧАНИЕ. Максимальная скорость составляет ~1500 об/мин, поскольку входная мощность составляет 50 Гц. Для двигателей с частотой 60 Гц 1500 об/мин будут равны 1800 об/мин.
Тем не менее, вы можете видеть, что скорость не сильно снижается при падении напряжения на 10В. Если напряжение уменьшится слишком сильно, двигатель может работать в нестабильной области (менее ~ 1000 об/мин) и, возможно, заглохнуть. В идеале вы действительно хотите, чтобы двигатель работал на оптимальной номинальной скорости для наилучшей и наиболее эффективной работы. Этот метод управления скоростью очень похож на метод управления скоростью щеточных двигателей постоянного тока. Однако диапазон оборотов регулирования скорости намного шире для коллекторных двигателей постоянного тока.
Чтобы этот метод управления был успешным, необходимо устройство обратной связи для замыкания контура между двигателем и регулятором скорости. Эта обратная связь необходима для предотвращения слишком сильных колебаний скорости двигателя (и входного напряжения).
Эта обратная связь необходима для предотвращения слишком сильных колебаний скорости двигателя (и входного напряжения).
Компания Oriental Motor использует тахогенераторы для замыкания контура между нашими двигателями с регулируемой скоростью переменного тока и регуляторами скорости, такими как серия DSC или серия US2. Тахогенератор, он же тахометр, генерирует напряжение, пропорциональное скорости. Он используется в непрерывном контуре обратной связи, чтобы поддерживать точность скорости на уровне ±1% или меньше.
Это упрощенная схема цепи управления для серии DSC.
Для всех, кто заинтересован, это схема цепи управления с более подробной информацией. Вы можете видеть, что мы используем симистор для управления напряжением. Мы также используем однополупериодный выпрямитель.
Здесь показано, как тахогенератор используется во время работы двигателя.
Поскольку схема управления намного проще, чем у ЧРП, двигатели переменного тока с регулированием скорости являются более экономичным вариантом по сравнению с двигателями переменного тока с приводом от ЧРП. Метод управления фазой также демонстрирует меньший электрический шум по сравнению с двигателями с частотно-регулируемым приводом, где частотно-регулируемый привод переключается с гораздо большей скоростью.
Метод управления фазой также демонстрирует меньший электрический шум по сравнению с двигателями с частотно-регулируемым приводом, где частотно-регулируемый привод переключается с гораздо большей скоростью.
Еще одним преимуществом серии DSC является вертикальная работа. В прошлом двигатели с тахогенератором были проблемой для вертикального перемещения. Причина в гравитации.
В этом примере двигатель перемещает груз вниз по ленточному конвейеру. Когда груз опускается, сила тяжести будет тянуть груз вниз и увеличивать его скорость. С увеличением скорости увеличивается напряжение тахогенератора. Это заставляет контроллер скорости думать, что двигатель вращается слишком быстро, таким образом снижая его напряжение, чтобы попытаться снизить скорость. Однако при снижении напряжения двигатель теряет крутящий момент. Этот процесс повторяется до тех пор, пока крутящий момент двигателя не иссякнет и нагрузка не упадет. В серии DSC функция остановки при замедлении обеспечивает управляемое замедление с автоматическим электромагнитным торможением. |
Недостатком двигателей переменного тока с регулированием скорости с тахогенераторной обратной связью является то, что при низких скоростях двигатель имеет определенные ограничения по крутящему моменту. Кривая крутящего момента двигателя помечена, чтобы показать это. Убедитесь, что вы работаете ниже «линии безопасной работы». Типы комбинаций (мотор-редукторы) см. пунктирную линию «Допустимый крутящий момент для комбинированного типа».
Другими словами, чтобы избежать этой проблемы, используйте мотор-редуктор.
Чтобы узнать больше о серии DSC или методе управления скоростью, ознакомьтесь с информационным документом.
Подпишитесь в правом верхнем углу страницы!
| Есть ли другая альтернатива? |
Если требуется работа при более низкой температуре, более высокая энергоэффективность, лучшее регулирование скорости, постоянный выходной крутящий момент или более широкий диапазон скоростей, идеальны. Похожие записи
. |
