Как работают сервоприводы и для чего они используются. Какие бывают типы сервоприводов. Как подключить сервопривод к Arduino. Примеры кода для управления стандартным и непрерывным сервоприводом.
Принцип работы и устройство сервопривода
Сервопривод — это электромеханическое устройство, позволяющее точно контролировать угловое положение, скорость и ускорение исполнительного механизма. Сервоприводы широко применяются в робототехнике, моделизме, промышленной автоматизации и других областях, где требуется прецизионное позиционирование.
Основные компоненты сервопривода:
- Электродвигатель постоянного тока
- Редуктор для увеличения крутящего момента
- Потенциометр для определения текущего положения вала
- Схема управления
Принцип работы сервопривода основан на использовании отрицательной обратной связи. При подаче управляющего сигнала схема сравнивает его с сигналом от датчика положения (потенциометра) и вращает двигатель до тех пор, пока рассогласование не станет нулевым.

Типы сервоприводов
Существует два основных типа сервоприводов:
- Стандартные сервоприводы — имеют ограниченный угол поворота, обычно 180°. Позиция вала задается шириной управляющего импульса.
- Сервоприводы непрерывного вращения — могут вращаться неограниченно в обоих направлениях. Ширина импульса задает скорость и направление вращения.
Кроме того, сервоприводы различаются по размеру, крутящему моменту, скорости поворота и другим параметрам. При выборе сервопривода важно учитывать требования конкретной задачи.
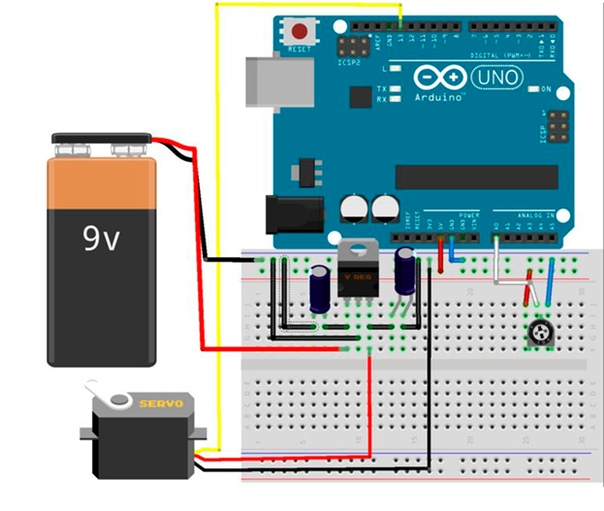
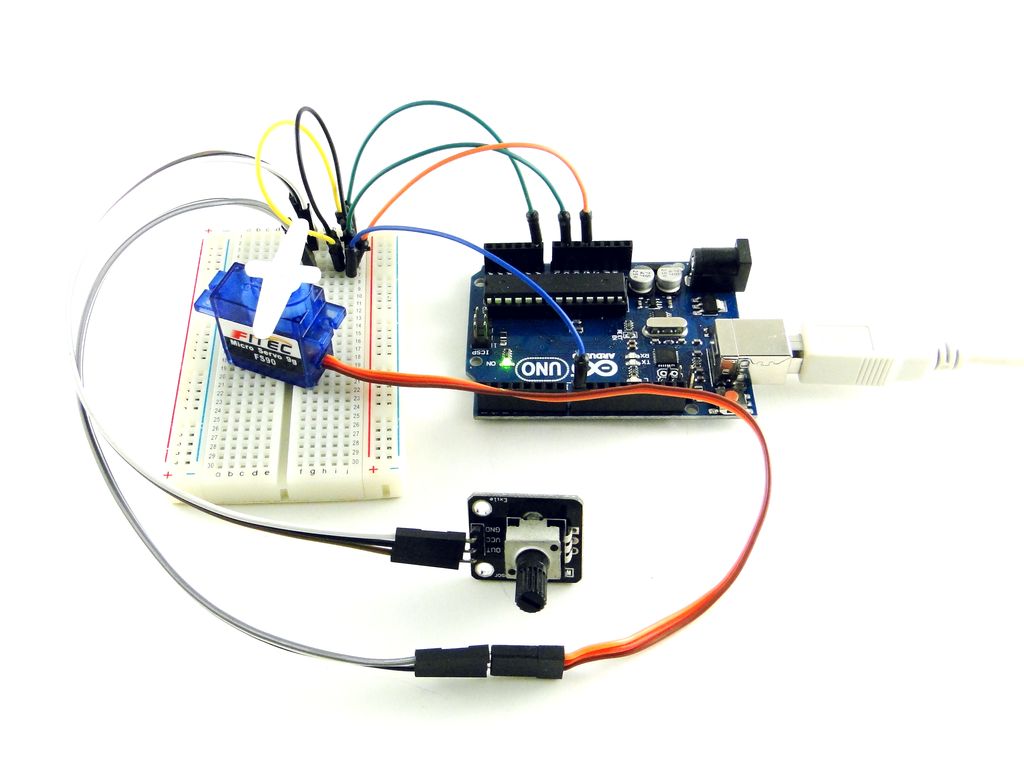
Подключение сервопривода к Arduino
Для подключения сервопривода к Arduino потребуется:
- Arduino (любая модель)
- Сервопривод
- Макетная плата и провода
- Внешний источник питания 5В (опционально)
Схема подключения:
- Черный/коричневый провод сервопривода подключаем к GND Arduino
- Красный провод — к 5V Arduino
- Желтый/оранжевый/белый (сигнальный) провод — к цифровому пину Arduino
При использовании мощных сервоприводов рекомендуется подключать питание от внешнего источника 5В, а не от Arduino.

Программирование сервопривода на Arduino
Для управления сервоприводом в Arduino IDE используется стандартная библиотека Servo. Рассмотрим базовые примеры для стандартного и непрерывного сервоприводов.
Пример для стандартного сервопривода
Данный код поворачивает вал сервопривода от 0 до 180 градусов и обратно:
«`cpp #includeПример для сервопривода непрерывного вращения
Этот код демонстрирует вращение сервопривода в обоих направлениях с разной скоростью:
«`cpp #includeКалибровка сервопривода
Для точной работы сервопривода может потребоваться его калибровка. Это особенно важно для сервоприводов непрерывного вращения. Процесс калибровки включает:
- Определение значений ШИМ для остановки, максимальной скорости вперед и назад
- Корректировку этих значений в коде
- Тестирование и точную подстройку
Для калибровки можно использовать специальные скетчи или провести ручную подстройку, наблюдая за поведением сервопривода при разных значениях ШИМ.
Расширенные возможности управления сервоприводами
Помимо базового управления положением, современные микроконтроллеры позволяют реализовать более сложные алгоритмы работы с сервоприводами:
- Плавное изменение скорости
- Управление ускорением
- Синхронизация нескольких сервоприводов
- Отслеживание текущего положения
Для реализации этих возможностей можно использовать таймеры микроконтроллера, прерывания и специализированные библиотеки.
Применение сервоприводов в проектах
Сервоприводы находят широкое применение в различных проектах на базе Arduino:
- Роботы и манипуляторы
- Системы слежения за солнцем для солнечных панелей
- Автоматизированные жалюзи и шторы
- Управление камерами видеонаблюдения
- Модели самолетов и автомобилей
При разработке проектов с сервоприводами важно учитывать их энергопотребление, механические нагрузки и требования к точности позиционирования.
Советы по работе с сервоприводами
Для успешной работы с сервоприводами следует учитывать несколько важных моментов:
- Убедитесь, что источник питания способен обеспечить достаточный ток для сервопривода
- Используйте отдельное питание для сервоприводов при работе с несколькими устройствами
- Избегайте резких изменений положения, используйте плавные переходы
- Учитывайте механические ограничения сервопривода и системы в целом
- Регулярно проверяйте и смазывайте механические части сервопривода
Соблюдение этих рекомендаций поможет продлить срок службы сервоприводов и повысить надежность вашего проекта.
Простая схема управления сервоприводом на микроконтроллере PIC12F675
Главная » Микроконтроллеры » Простая схема управления сервоприводом на микроконтроллере PIC12F675
Сервоприводы идеально подходят для приложений, отличных от тех, для которых они предназначены, например, в качестве привода ригеля замка двери.
В таком нестандартном применении сервопривода, сложность составляет в формировании управляющего импульса необходимой продолжительности. Данная схема избавит нас от такой проблемы.
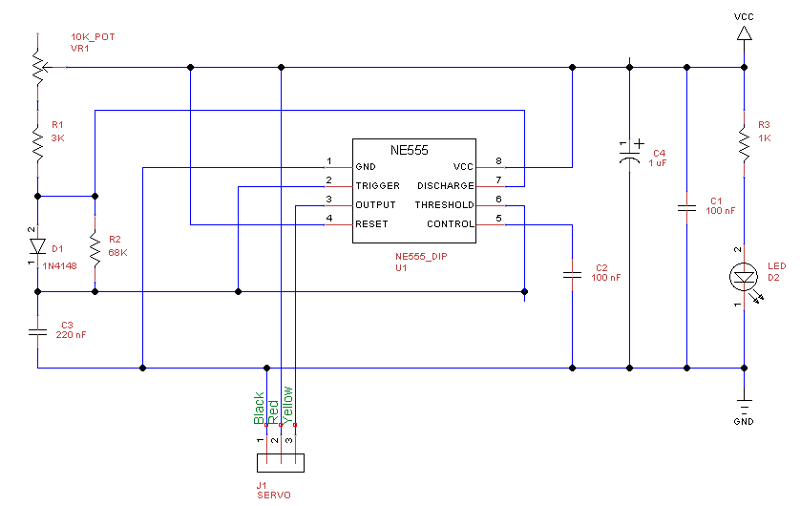
Принципиальная схема контроллера сервопривода показана на следующем рисунке. Схема содержит всего несколько элементов: диод VD1 (1N4007) защищает схему от обратного подключения напряжения питания, стабилизатор DA1 (7805) обеспечивает напряжение 5 В для сервомотора, а через фильтр R4 и C1 подается питание на микроконтроллер DD1 (PIC12F675).
Потенциометры R6 и R7, подключенные к АЦП микроконтроллера, используются в качестве делителя напряжения для установки двух значений напряжения, которые изменяют продолжительность управляющих импульсов сервопривода. Переключатель SA1 предназначен для перевода сервомотора в одно из двух положений.
Переключатель SA1 предназначен для перевода сервомотора в одно из двух положений.
Работой контроллера сервопривода управляет программа, содержащаяся в памяти микроконтроллера. Таймер микроконтроллера TIMER1 — это 16-разрядный счетчик, который задействован для генерации прерываний каждые 20 мсек, таким образом, устанавливается стандартная частота управляющих импульсов. Прерывание TIMER1 происходит, когда счетчик переполняется.
Как известно, положение сервопривода определяется длиной импульса. Длительность каждого импульса определяется с помощью TIMER0. Его запуск синхронизируется с прерыванием от TIMER1. Переполнение TIMER0 генерирует второе прерывание, которое завершает импульс и останавливает счетчик.
Время переполнения TIMER0 и, следовательно, длительность импульса определяется начальным значением счетчика, которое пропорционально результату преобразования АЦП. Таким образом, изменение напряжения в диапазоне 0…5 В на входе АЦП приводит к изменению длительности импульса в диапазоне 0,5…2,5 мсек.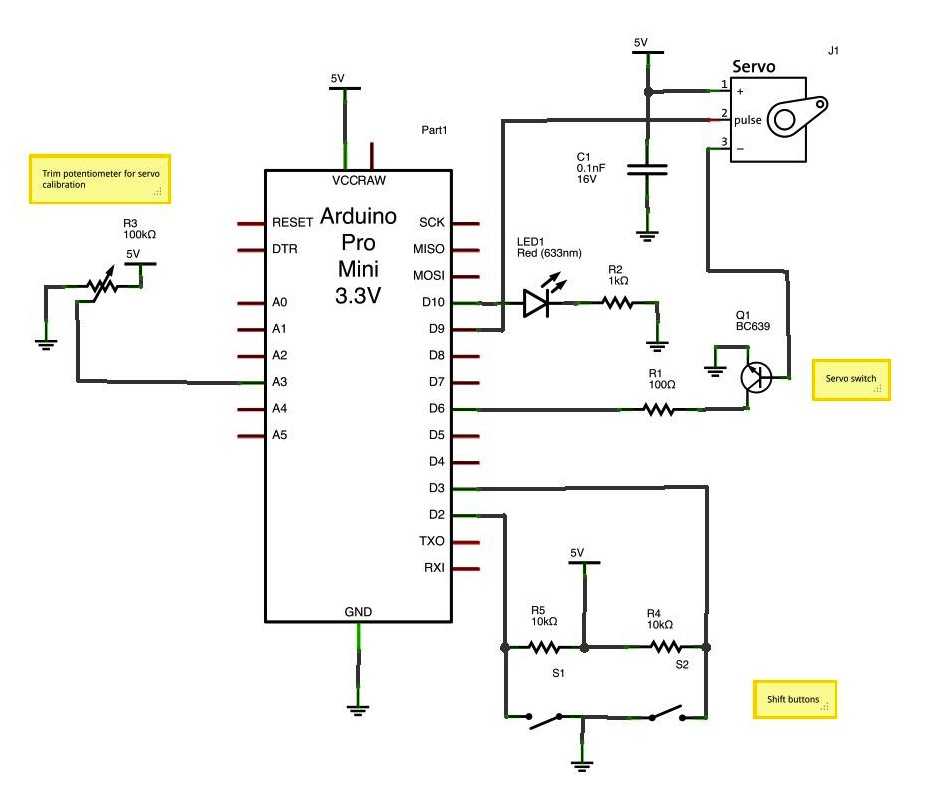
Кроме того, состояние SA1 определяет, какой потенциометр (R6 или R7) будет определять напряжение на входе АЦП. Благодаря этому сервопривод может управляться либо через SA1, либо в полном объеме путем изменения положения потенциометров.
Схема проверена в Proteus:
Инвертор 12 В/ 220 В
Инвертор с чистой синусоидой, может обеспечивать питание переменно…
Подробнее
Устройство собрано на печатной плате, схема монтажа которой показана ниже. Следует обратить внимание на то, что R1…R5 — SMD резисторы, которые установлены на другой стороне платы.
Скачать рисунок печатной платы, прошивку, модель Proteus (38,1 KiB, скачано: 1 647)
Тестер транзисторов / ESR-метр / генератор
Многофункциональный прибор для проверки транзисторов, диодов, тиристоров…
Подробнее
Categories Микроконтроллеры Tags PIC12f675, Сервопривод
Отправить сообщение об ошибке.
УЛУЧШЕНИЕ РАБОТЫ СЕРВОПРИВОДОВ
При создании радиоуправляемых роботов и других подобных устройств, бывает нужен способ удобного управления сервоприводом, при этом не усложнять электронику, а использовать стандартную систему дистанционного управления моделью для экономии времени за счет использования готовых деталей. При управлении сервоприводами с помощью электроники на основе микроконтроллера можно использовать полные 180 градусов вращения, однако стандартные схемы RC обычно поддерживают только 90 градусов или даже меньше. В общем был нужен способ ограничения скорости поворота сервоприводов, чтобы предотвратить износ и повреждение частей модели.
При управлении сервоприводами с помощью электроники на основе микроконтроллера можно использовать полные 180 градусов вращения, однако стандартные схемы RC обычно поддерживают только 90 градусов или даже меньше. В общем был нужен способ ограничения скорости поворота сервоприводов, чтобы предотвратить износ и повреждение частей модели.
Данный RC серво процессор – это маленькое устройство, которое находится между RC-приемником и сервоприводом, он позволяет контролировать как угол поворота, так и скорость движения сервопривода. Схема предельно проста и используется в нём только 4 радиокомпонента.
Плата сервопривода RC
Модуль позволяет определить ожидаемый диапазон входного сигнала от RC контроллера, а затем передать этот диапазон на желаемый выход. Это выполняется простым изменением некоторых операторов #define в исходном коде PIC12F683. Прошивка заботится о расчете требуемого выхода ШИМ для сервопривода путем масштабирования доступного входного диапазона до выхода.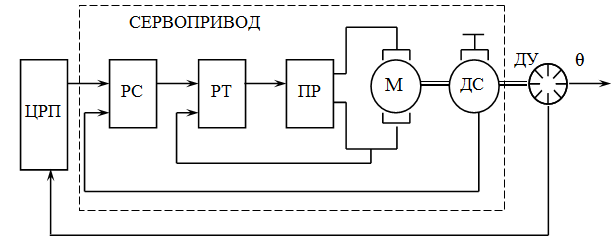
Чтобы установить программу, надо сначала указать диапазон выходного сигнала, поддерживаемый вашим RC-контроллером, который обычно составляет от 1100 до 1900 мкс. Тут есть две поддерживаемые настройки: ограничение скорости вращения – может быть установлена равным 0 для работы без ограничения, или оно представляет максимальную разницу в микросекундах от импульса к импульсу, генерируемого приемником RC (обычно максимальное изменение в 1/50 секунды). Также можете установить количество сэмплов, которые будут использоваться для измерения выхода RC контроллеров.
Программа использует преимущество того факта, что типовые схемы радиоуправления посылают управляющий импульс около 1-2 мс с последующей паузой в 20-30 мс. МК PIC12F683 производит выборку импульса из радиоприемника, а затем выполняет все необходимые вычисления для выходного импульса в течение относительно длительного промежутка перед отправкой импульса к цели. Это означает, что программное обеспечение может быть закодировано без прерываний и помогает поддерживать стабильную синхронизацию.
Принципиальная схема контроллера серво
На картинке показана принципиальная схема сервопроцессора RC и разработанный вариант печатной платы.
Плата разработана так, чтобы быть максимально простой и компактной. Размещены тут стабилизатор 5 В и PIC-контроллер, для конструкции требуется из пассивных компонентов всего 2 конденсатора по 100 нФ для стабилизации питания с обеих сторон микросхемы XC6216. Плата питается от питания серво, однако благодаря встроенному стабилизатору она может работать с батареями и более 5 В без проблем. В архиве есть файлы проекта, включающие прошивку, схему в Eagle и файл печатной платы.
Форум по микроконтроллерам
Как использовать сервоприводы в ваших проектах по электронике
Сервоприводы используются для широкого спектра приложений, от простых электронных проектов до роботов, промышленного оборудования и даже автоматизированных производственных систем. Сервоприводы — это двигатели постоянного или переменного тока, которые могут вращаться в определенное положение и удерживать это положение неопределенное время. Их также называют поворотными приводами
Их также называют поворотными приводами
Существует два типа серводвигателей – переменного и постоянного тока. Сервопривод переменного тока может работать с более высокими токами, поэтому они обычно используются в промышленном оборудовании. Сервоприводы постоянного тока не рассчитаны на высокие токи, поэтому они обычно используются для маломощных приложений.
Как работают сервоприводы
Внутри сервопривода обычно находится небольшой двигатель постоянного тока, потенциометр и схема управления. Когда двигатель вращается, сопротивление потенциометра изменяется, и благодаря этому схема управления может точно регулировать движение. Схема сервопривода встроена прямо в блок двигателя и имеет позиционируемый вал, обычно оснащенный шестерней и рычагом управления.
С помощью потенциометра, прикрепленного к вращающемуся валу, определите положение сервоприводов. Входящий импульс измеряется, который затем подает ток на двигатель для вращения вала до тех пор, пока потенциометр не укажет, что положение соответствует ширине входящего импульса. Это форма контроля с обратной связью. В течение этого времени двигатель получает желаемое положение по ширине импульса, а фактическое положение вала возвращается в схему через потенциометр. Сервопривод — это устройство, использующее обратную связь для достижения желаемого результата. Большинство серводвигателей имеют диапазон вращения от 0 до 180 градусов и обеспечивают обратную связь по положению/углу. На самом деле мы можем запрограммировать сервопривод для перехода в указанное положение с помощью Arduino.
Это форма контроля с обратной связью. В течение этого времени двигатель получает желаемое положение по ширине импульса, а фактическое положение вала возвращается в схему через потенциометр. Сервопривод — это устройство, использующее обратную связь для достижения желаемого результата. Большинство серводвигателей имеют диапазон вращения от 0 до 180 градусов и обеспечивают обратную связь по положению/углу. На самом деле мы можем запрограммировать сервопривод для перехода в указанное положение с помощью Arduino.
Потенциометр обратной связи
Привод и потенциометр обратной связи составляют фразу потенциометр обратной связи. Привод с обратной связью — это тип линейного привода, в котором используется позиционная обратная связь. Он адаптируется к приложениям, где требуется замкнутая система. Но для чего используется потенциометр? Потенциометр используется для считывания положения привода во время его цикла.
Преимущество использования системы обратной связи с потенциометром в линейном приводе заключается в том, что контроллеру не нужно сохранять состояние или запоминать, где находится вал привода.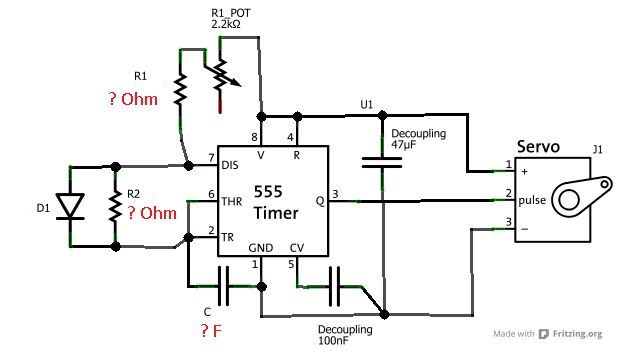 Потенциометр предлагает абсолютное положение каждый раз, когда контроллер считывает показания датчика, хотя это показание может не отражать фактическое положение вала линейного привода.
Потенциометр предлагает абсолютное положение каждый раз, когда контроллер считывает показания датчика, хотя это показание может не отражать фактическое положение вала линейного привода.
Широтно-импульсная модуляция (ШИМ)
Широтно-импульсная модуляция — это тип цифрового сигнала. ШИМ используется в различных приложениях, включая управление движением или положением сервопривода. Это метод уменьшения средней мощности, подаваемой электрическим сигналом. Широтно-импульсная модуляция представляет собой тип цифрового сигнала. ШИМ используется в различных приложениях, включая управление движением или положением сервопривода. Это метод уменьшения средней мощности, подаваемой электрическим сигналом.
Переход к перемещению или положению сервопривода или к управлению сервоприводом — это выполняется путем отправки сервоприводу сигнала широтно-импульсной модуляции (ШИМ). Этот сигнал представляет собой серию повторяющихся импульсов, определяющих положение, которое должно быть достигнуто сервоприводом. Сигнал ШИМ исходит от обычных микроконтроллеров, таких как Arduino, а также может исходить от приемника радиоуправления. Электроника внутри сервопривода переводит ширину импульса в позицию. Когда сервопривод получает команду на вращение, двигатель получает питание до тех пор, пока потенциометр не достигнет значения, соответствующего заданному положению. Учитывая ограничения вращения сервопривода, нейтраль определяется как центр вращения. Серводвигатель обычно может вращаться только на 90° в любом направлении, всего движение на 180°. ШИМ, отправляемый на двигатель, определяет положение вала и на основе длительности импульса, отправляемого по проводу управления; затем ротор повернется в нужное положение.
Сигнал ШИМ исходит от обычных микроконтроллеров, таких как Arduino, а также может исходить от приемника радиоуправления. Электроника внутри сервопривода переводит ширину импульса в позицию. Когда сервопривод получает команду на вращение, двигатель получает питание до тех пор, пока потенциометр не достигнет значения, соответствующего заданному положению. Учитывая ограничения вращения сервопривода, нейтраль определяется как центр вращения. Серводвигатель обычно может вращаться только на 90° в любом направлении, всего движение на 180°. ШИМ, отправляемый на двигатель, определяет положение вала и на основе длительности импульса, отправляемого по проводу управления; затем ротор повернется в нужное положение.
Штыри/провода сервоприводов
Обычно сервоприводы имеют три провода. Это питание, земля и сигнал. Как правило, провод питания красного цвета, который следует подключить к контакту 5V платы Arduino. Заземляющий провод обычно черного цвета, его следует подключать к заземляющему контакту на плате Arduino. Наконец, сигнальный провод обычно желтого, оранжевого или белого цвета. Затем сигнальный провод подключается к цифровому выводу на плате Arduino. Не забудьте правильно подключить эти провода.
Наконец, сигнальный провод обычно желтого, оранжевого или белого цвета. Затем сигнальный провод подключается к цифровому выводу на плате Arduino. Не забудьте правильно подключить эти провода.
Как управлять положением сервопривода
С помощью широтно-импульсной модуляции (ШИМ) сервоприводы управляются через провод управления. Серводвигатель обычно может поворачиваться только на 90° в любом направлении, что в сумме составляет 180°. Нейтральное положение двигателя определяется как положение сервопривода с одинаковым потенциалом вращения как по часовой стрелке, так и против часовой стрелки. Его часто называют центром. Сигнал ШИМ, отправляемый на двигатель, определяет положение вала и зависит от длительности импульса, передаваемого по проводу управления. Затем он будет повернут в нужное положение.
Когда этим сервоприводам подается команда двигаться, они перемещаются в это положение и удерживают его. Если внешняя сила давит на сервопривод, когда сервопривод удерживает положение, сервопривод будет сопротивляться перемещению из этого положения. Максимальное усилие, которое может приложить сервопривод, называется номинальным крутящим моментом. Однако сервоприводы не будут удерживать свое положение вечно; импульс положения должен повторяться, чтобы заставить сервопривод оставаться в этом положении.
Максимальное усилие, которое может приложить сервопривод, называется номинальным крутящим моментом. Однако сервоприводы не будут удерживать свое положение вечно; импульс положения должен повторяться, чтобы заставить сервопривод оставаться в этом положении.
Все сервоприводы вращаются по часовой стрелке и против часовой стрелки. Направление вращения сервопривода зависит от сигнала, который получает сервопривод.
Пример схемы ШИМ-схемы сервоуправления
Вот детали, которые вам потребуются для сборки этой сервоуправляющей схемы:
- 555 Таймер
- 1N4148 диод
- Четыре батарейки АА 2 Ом 4 Ом, 4
- 4 Держатель батарей
- резисторы
- 10 нФ, конденсаторы 120 нФ
- Потенциометр 50K
- Перемычки
- Макет
При повороте ручки потенциометра сервопривод должен повернуться соответствующим образом. Спасибо за прочтение! Обязательно оставьте комментарий ниже, если у вас есть какие-либо вопросы.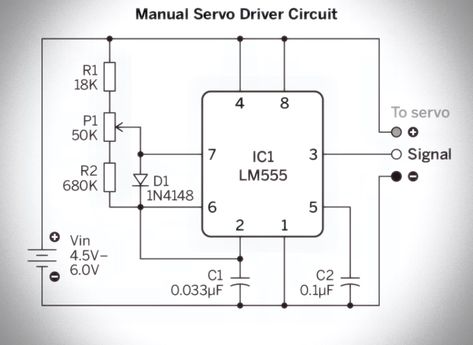
Сервопривод
CircuitPython | Adafruit Circuit Playground Express
ЦепьPython Сервопривод
Сохранить Подписаться
Пожалуйста, войдите, чтобы подписаться на это руководство.
После входа в систему вы будете перенаправлены обратно к этому руководству и сможете подписаться на него.
Чтобы использовать сервоприводы, мы используем pwmio . Теперь, теоретически, вы можете просто использовать необработанные вызовы pwmio , чтобы установить частоту на 50 Гц, а затем установить ширину импульса. Но мы бы предпочли сделать его немного более элегантным и легким!
Итак, вместо этого мы будем использовать adafruit_motor , который прекрасно управляет сервоприводами! adafruit_motor — это библиотека, поэтому обязательно скачайте ее из комплекта библиотек, если вы еще этого не сделали! Если вам нужна помощь в установке библиотеки, посетите страницу библиотек CircuitPython.
Сервоприводы бывают двух типов:
- Стандартный сервопривод для хобби — рупор перемещается на 180 градусов (90 градусов в каждом направлении от нуля градусов).
- A непрерывный сервопривод — гудок движется на полном вращении, как двигатель постоянного тока. Вместо указанного угла вы устанавливаете значение дроссельной заслонки, где 1,0 — полный вперед, 0,5 — наполовину вперед, 0 — остановка, а -1 — полный задний ход, а другие значения находятся между ними.
Проводка сервопривода
Сервоприводы будут работать только с выводами, поддерживающими ШИМ! Проверьте информацию о своей плате, чтобы проверить, какие контакты имеют выходы PWM.
Соединения для сервопривода одинаковы для стандартных сервоприводов и сервоприводов с непрерывным вращением.
Подсоедините провод заземления сервопривода коричневый или черный к земле на плате CircuitPython.
Подсоедините провод питания сервопривода , красный , к источнику питания 5 В, питания USB достаточно для одного или двух сервоприводов. Для большего вам понадобится внешний аккумулятор. Не используйте 3,3 В для питания сервопривода!
Для большего вам понадобится внешний аккумулятор. Не используйте 3,3 В для питания сервопривода!
Подключите сигнальный провод сервопривода желтый или белый к выводу управления/данных, в данном случае A1 или A2 , но вы можете использовать любой вывод с поддержкой ШИМ.
Например, чтобы подключить сервопривод к Trinket , подключите провод заземления к GND , провод питания к USB , а сигнальный провод к 0 .
Помните, что A2 на Брелоке помечен «0» .
Для Gemma используйте зажимы типа «крокодил» для подключения провода заземления к GND , провода питания к VOUT , а сигнальный провод к A2 .
Для Circuit Playground Express и Circuit Playground Bluefruit используйте зажимы типа «крокодил» для подключения провода заземления к GND , провода питания к VOUT и сигнального провода к A2 .
Для QT Py M0 подключите провод заземления к GND , провод питания к 5V , а сигнальный провод к А2 .
Для таких плат, как Feather M0 Express , ItsyBitsy M0 Express и Metro M0 Express , подключите провод заземления к любому GND , провод питания к USB или 5V , а сигнальный провод к 9 .
Для моделей Metro M4 Express , ItsyBitsy M4 Express и Feather M4 Express подключите провод заземления к любому G или GND , провод питания к USB или 5V , а сигнальный провод к A2 .
Код стандартного сервопривода
Вот пример, который будет поворачивать сервопривод, подключенный к контакту A2 , от 0 градусов до 180 градусов (от -90 до 90 градусов) и обратно.
Для использования с CircuitPython необходимо сначала установить несколько библиотек в папку lib на диске CIRCUITPY . Затем вам нужно обновить code.py с примером сценария.
К счастью, мы можем сделать это за один раз. В приведенном ниже примере нажмите кнопку Download Project Bundle ниже, чтобы загрузить необходимые библиотеки и файл code.py в виде ZIP-файла. Извлеките содержимое zip-файла, откройте каталог CircuitPython_Essentials/CircuitPython_Servo/, а затем щелкните каталог, соответствующий версии CircuitPython, которую вы используете, и скопируйте содержимое этого каталога в свой 9094.0093 ЦЕПЬ привод.
Теперь ваш диск CIRCUITPY должен выглядеть примерно так, как показано на следующем рисунке:
# SPDX-FileCopyrightText: 2018 Kattni Rembor for Adafruit Industries # # SPDX-идентификатор лицензии: MIT """Пример стандартного сервопривода CircuitPython Essentials Servo""" время импорта импортная доска импортировать pwmio из adafruit_motor импортировать сервопривод # создаем объект PWMOut на контакте A2.pwm = pwmio.PWMOut(board.A2, duty_cycle=2 ** 15, частота=50) # Создаем сервообъект my_servo. my_servo = сервопривод.Серво(ШИМ) пока верно: для угла в диапазоне (0, 180, 5): # 0 - 180 градусов, 5 градусов за раз. my_servo.angle = угол время сна (0,05) для угла в диапазоне (180, 0, -5): # 180 - 0 градусов, 5 градусов за раз. my_servo.angle = угол время сна (0,05)
Посмотреть на GitHub
Код непрерывного сервопривода
Есть два отличия между непрерывными сервоприводами и стандартными сервоприводами:
- Объект
servoсоздается какmy_servo = servo.ContinuousServo(pwm)вместо 7my_servo = servo.Servo90pwm9(0pwm) - Вместо использования
myservo.angleвы используетеmy_servo.throttle, используя значение газа от 1,0 (полностью включено) до 0,0 (остановлено) и до -1,0 (полный реверс). Любое число между ними будет частичной скоростью вперед (положительно) или назад (отрицательно). Это очень похоже на стандартное управление двигателем постоянного тока с помощью библиотека adafruit_motor .
Это очень похоже на стандартное управление двигателем постоянного тока с помощью библиотека adafruit_motor .
В этом примере выполняется полный вперед в течение 2 секунд, затем останавливается на 2 секунды, выполняется полный реверс в течение 2 секунд, затем останавливается на 4 секунды.
Для использования с CircuitPython необходимо сначала установить несколько библиотек в папку lib на диске CIRCUITPY . Затем вам нужно обновить code.py с помощью примера скрипта.
К счастью, мы можем сделать это за один раз. В приведенном ниже примере щелкните Download Project Bundle 9.0094 ниже, чтобы загрузить необходимые библиотеки и файл code.py в виде zip-файла. Извлеките содержимое zip-файла, откройте каталог CircuitPython_Essentials/CircuitPython_Continuous_Servo/, а затем щелкните каталог, соответствующий версии CircuitPython, которую вы используете, и скопируйте содержимое этого каталога на свой диск CIRCUITPY .
Теперь ваш диск CIRCUITPY должен выглядеть примерно так, как показано на следующем рисунке:
# SPDX-FileCopyrightText: 2019 Anne Barela для Adafruit Industries
#
# SPDX-идентификатор лицензии: MIT
"""Пример сервопривода непрерывного вращения CircuitPython Essentials Servo"""
время импорта
импортная доска
импортировать pwmio
из adafruit_motor импортировать сервопривод
# создаем объект PWMOut на контакте A2.
pwm = pwmio.PWMOut(board.A2, частота=50)
# Создаем сервообъект my_servo.
my_servo = сервопривод.ContinuousServo(ШИМ)
пока верно:
распечатать("вперед")
my_servo.throttle = 1.0
время сна (2.0)
распечатать("стоп")
my_servo.throttle = 0.0
время сна (2.0)
распечатать("обратно")
my_servo.throttle = -1.0
время сна (2.0)
распечатать("стоп")
my_servo.throttle = 0.0
время сна (4.0)
Посмотреть на GitHub
Довольно просто!
Обратите внимание, что мы предполагаем, что 0 градусов соответствует 0,5 мс, а 180 градусов соответствует ширине импульса 2,5 мс.