Как работает ШИМ-контроллер двигателя постоянного тока. Какие компоненты нужны для сборки простой схемы ШИМ-регулятора. Каковы преимущества использования ШИМ для управления скоростью двигателя. Как правильно подобрать элементы схемы ШИМ-контроллера. Какие проблемы могут возникнуть при использовании ШИМ-регуляторов.
Принцип работы ШИМ-контроллера двигателя постоянного тока
ШИМ (широтно-импульсная модуляция) — это метод аналогового управления, позволяющий регулировать скорость вращения двигателя постоянного тока путем быстрого включения и выключения питания. Основные компоненты простейшего ШИМ-контроллера:
- Генератор прямоугольных импульсов (например, на микросхеме NE555)
- Потенциометр для регулировки скважности импульсов
- Силовой транзистор для коммутации тока двигателя
- Защитный диод параллельно двигателю
Изменяя скважность импульсов с помощью потенциометра, можно плавно регулировать среднее напряжение на двигателе и, соответственно, его скорость вращения.
Преимущества использования ШИМ для управления двигателями
ШИМ-регуляторы имеют ряд важных преимуществ по сравнению с другими методами управления скоростью двигателей постоянного тока:
- Высокий КПД благодаря работе транзистора в ключевом режиме
- Плавность регулировки во всем диапазоне скоростей
- Простота реализации на недорогих компонентах
- Возможность управления мощными двигателями
- Малые габариты и вес устройства
Эти преимущества обусловили широкое распространение ШИМ-контроллеров в различных областях техники.
Выбор компонентов для схемы ШИМ-регулятора
При разработке ШИМ-контроллера двигателя постоянного тока важно правильно выбрать основные компоненты схемы:
- Частоту ШИМ выбирают в диапазоне 1-20 кГц
- Силовой транзистор должен выдерживать ток и напряжение двигателя
- Защитный диод выбирают на обратное напряжение не менее напряжения питания
- Потенциометр — с линейной характеристикой сопротивления
Правильный выбор компонентов обеспечит надежную и эффективную работу ШИМ-регулятора.
Схемы простых ШИМ-контроллеров для двигателей постоянного тока
Существует множество вариантов схем ШИМ-регуляторов для двигателей постоянного тока. Рассмотрим две простые схемы:

1. ШИМ-контроллер на микросхеме NE555
Это простейший вариант ШИМ-регулятора на популярном таймере. Основные компоненты:
- Микросхема NE555 в режиме генератора
- Потенциометр 100 кОм для регулировки скважности
- Силовой транзистор TIP122
- Защитный диод 1N4007
Схема позволяет управлять двигателями мощностью до 50-60 Вт.
2. ШИМ-контроллер на транзисторах
Эта схема не требует микросхем и состоит только из дискретных компонентов:
- Генератор на двух транзисторах
- Потенциометр 10-47 кОм
- Силовой MOSFET-транзистор
- Защитный диод
Такая схема проще в изготовлении и ремонте, но требует точного подбора компонентов.
Применение ШИМ-контроллеров для управления двигателями
ШИМ-регуляторы широко используются для управления двигателями постоянного тока в различных областях техники:
- Электроинструменты (дрели, шуруповерты)
- Бытовая техника (кухонные комбайны, блендеры)
- Автомобильная электроника (стеклоподъемники, вентиляторы)
- Робототехника (приводы колес и манипуляторов)
- Промышленные приводы (конвейеры, насосы)
Простота и эффективность ШИМ-регуляторов обеспечивает их популярность в самых разных устройствах.
Проблемы при использовании ШИМ-контроллеров двигателей
При разработке и эксплуатации ШИМ-регуляторов могут возникать некоторые проблемы:
- Электромагнитные помехи из-за высокочастотного переключения
- Акустический шум двигателя на частоте ШИМ
- Выход из строя силового транзистора при перегрузках
- Нестабильность на низких оборотах
- Сложность точной настройки скорости
Большинство этих проблем решается правильным выбором компонентов и частоты ШИМ, а также применением дополнительных схем защиты и фильтрации.
Перспективы развития ШИМ-контроллеров двигателей
Развитие технологий открывает новые возможности для совершенствования ШИМ-регуляторов двигателей постоянного тока:
- Применение микроконтроллеров для реализации сложных алгоритмов управления
- Использование силовых GaN и SiC транзисторов для повышения КПД
- Интеграция датчиков тока и положения ротора для прецизионного управления
- Беспроводные интерфейсы для дистанционной настройки параметров
- Адаптивные алгоритмы для оптимизации работы в различных режимах
Эти инновации позволят создавать более эффективные и функциональные ШИМ-контроллеры для двигателей постоянного тока.
схема, принцип работы, управление :: SYL.ru
Как оптимизировать приготовление еды и сэкономить время на кухне: лайфхаки
Получается вкусно. Готовим сочные морковные кексы для семьи
Почему появляются гусиные лапки. Как убрать неприятное явление
Легкий и полезный ужин за 30 минут. Ароматный куриный фахитас оценят все
15 минут — и все готово: рецепт полезной «шоколадной» пасты из нута
Подойдут для любого образа: как стилизовать хит весны — плиссированные брюки
Modern Shag: лучшие вариации современной стрижки шэгги под разные формы лица
С рубашкой или топом. Чем дополнить зауженные джинсы
Чем дополнить зауженные джинсы Массивные серьги-гвоздики — хитовый тренд весны 2023: особенности украшений
Автор Jane Smith
Один из используемых подходов, позволяющих существенно сократить потери на нагревании силовых компонентов радиосхем, представляет собой использование переключательных режимов работы установок. При подобных системах электросиловой компонент или раскрыт — в это время на нем наблюдается фактически нулевое падение напряжения, или открыт — в это время на него подается нулевой ток. Рассеиваемую мощность можно вычислить, перемножив показатели силы тока и напряжения. В этом режиме получается достичь коэффициента полезного действия около 75-80% и более.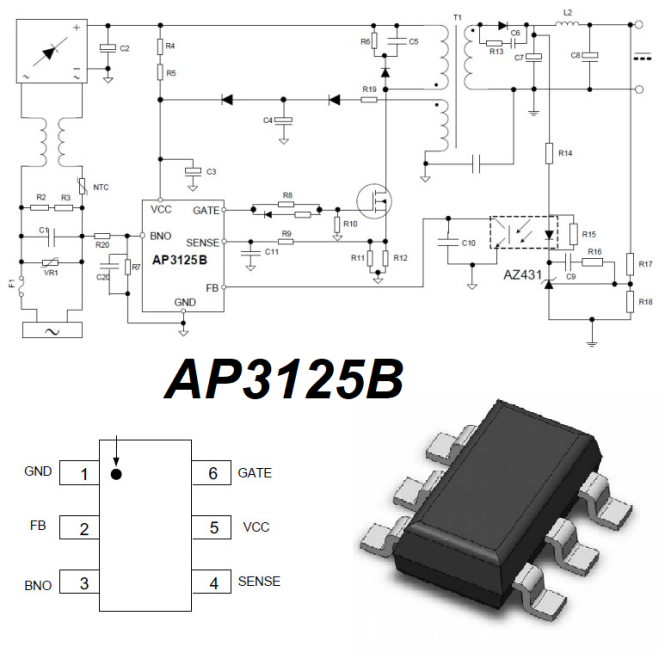
Что такое ШИМ?
Для получения на выходе сигнала требуемой формы силовой ключ должен открываться всего лишь на определенное время, пропорциональное вычисленным показателям выходного напряжения. В этом и заключается принцип широтно-импульсной модуляции (ШИМ, PWM). Далее сигнал такой формы, состоящий из импульсов, разнящихся по своей ширине, поступает в область фильтра на основе дросселя и конденсатора. После преобразования на выходе будет практически идеальный сигнал требуемой формы.
Область применения ШИМ не ограничивается импульсными источниками питания, стабилизаторами и преобразователями напряжения. Использование данного принципа при проектировании мощного усилителя звуковой частоты дает возможность существенно снизить потребление устройством электроэнергии, приводит к миниатюризации схемы и оптимизирует систему теплоотдачи. К недостаткам можно причислить посредственное качество сигнала на выходе.
Формирование ШИМ-сигналов
Создавать ШИМ-сигналы нужной формы достаточно трудно.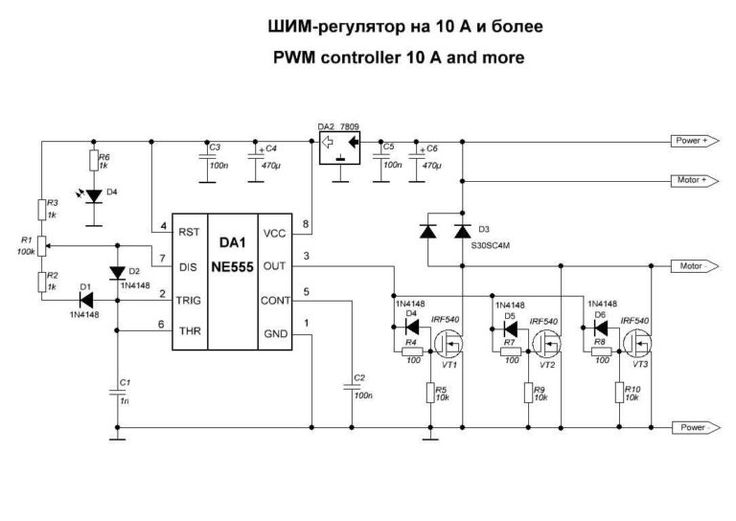 Тем не менее индустрия сегодня может порадовать замечательными специальными микросхемами, известными как ШИМ-контроллеры. Они недорогие и целиком решают задачу формирования широтно-импульсного сигнала. Сориентироваться в устройстве подобных контроллеров и их использовании поможет ознакомление с их типичной конструкцией.
Тем не менее индустрия сегодня может порадовать замечательными специальными микросхемами, известными как ШИМ-контроллеры. Они недорогие и целиком решают задачу формирования широтно-импульсного сигнала. Сориентироваться в устройстве подобных контроллеров и их использовании поможет ознакомление с их типичной конструкцией.
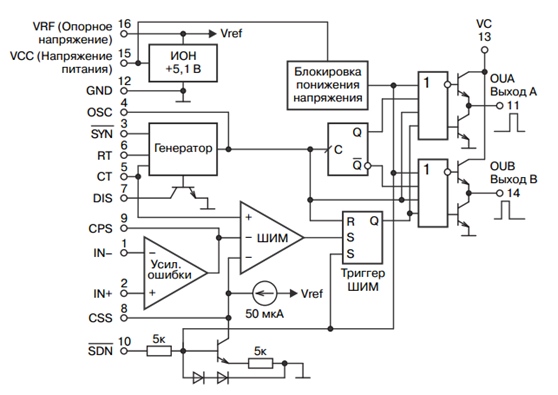
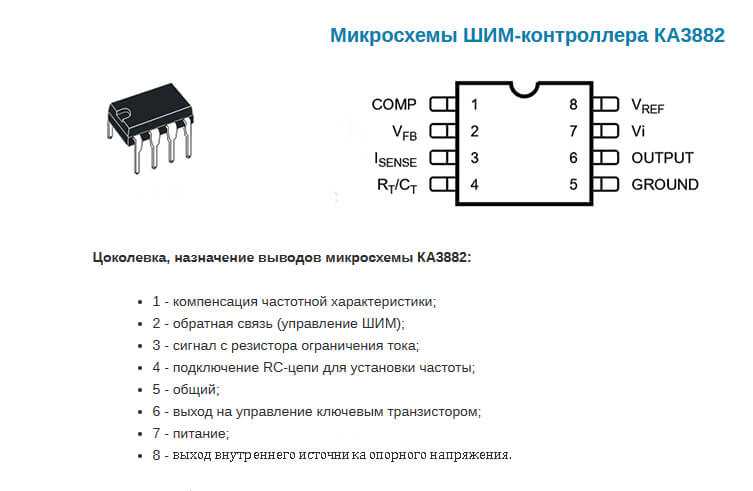
Стандартная схема контроллера ШИМ предполагает наличие следующих выходов:
- Общий вывод (GND). Он реализуется в виде ножки, которая подключается к общему проводу схемы питания устройства.
- Вывод питания (VC). Отвечает за электропитание схемы. Важно не спутать его с соседом с похожим названием — выводом VCC.
- Вывод контроля питания (VCC). Как правило, чип контроллера ШИМ принимает на себя руководство силовыми транзисторами (биполярными либо полевыми). В случае если напряжение на выходе снизится, транзисторы станут открываться лишь частично, а не целиком. Стремительно нагреваясь, они в скором времени выйдут из строя, не справившись с нагрузкой.
 Для того чтобы исключить такую возможность, необходимо следить за показателями напряжения питания на входе микросхемы и не допускать превышения расчетной отметки. Если напряжение на данном выводе опускается ниже установленного специально для этого контроллера, управляющее устройство отключается. Как правило, данную ножку соединяют напрямую с выводом VC.
Для того чтобы исключить такую возможность, необходимо следить за показателями напряжения питания на входе микросхемы и не допускать превышения расчетной отметки. Если напряжение на данном выводе опускается ниже установленного специально для этого контроллера, управляющее устройство отключается. Как правило, данную ножку соединяют напрямую с выводом VC.
Выходное управляющее напряжение (OUT)
Количество выводов микросхемы определяется её конструкцией и принципом работы. Не всегда удается сразу разобраться в сложных терминах, но попробуем выделить суть. Существуют микросхемы на 2-х выводах, управляющие двухтактными (двухплечевыми) каскадами (примеры: мост, полумост, 2-тактный обратный преобразователь). Существуют и аналоги ШИМ-контроллеров для управления однотактными (одноплечевыми) каскадами (примеры: прямой/обратный, повышающий/понижающий, инвертирующий).
Помимо этого, выходной каскад может быть по строению одно- и двухтактным. Двухтактный используется в основном для управления полевым транзистором, зависящим от напряжения. Для быстрого закрытия необходимо добиться быстрой разрядки емкостей «затвор — исток» и «затвор — сток». Для этого как раз и используется двухтактный выходной каскад контроллера, задачей которого является обеспечение замыкание выхода на общий кабель, если требуется закрыть полевой транзистор.
Для быстрого закрытия необходимо добиться быстрой разрядки емкостей «затвор — исток» и «затвор — сток». Для этого как раз и используется двухтактный выходной каскад контроллера, задачей которого является обеспечение замыкание выхода на общий кабель, если требуется закрыть полевой транзистор.
Для контроля над биполярным транзистором двухтактный каскад не используется, так как управление осуществляется с помощью тока, а не напряжения. Для закрытия биполярного транзистора достаточно всего лишь прекратить протекание тока через базу. При этом замыкание базы на общий провод необязательно.
Ещё о функциях контроллеров ШИМ
Задумав спроектировать контроллер ШИМ своими руками, необходимо как следует продумать все детали его реализации. Только так можно создать работающее устройство. Кроме вышеуказанных выходов, работа ШИМ-контроллера подразумевает наличие следующих функций:
- Опорное напряжение (VREF). Фабричные изделия для удобства обычно дополняются функцией выработки стабильного опорного напряжения.
 Специалисты заводов-изготовителей рекомендуют соединять данный вывод с общим проводом через емкость не менее 1 мкФ для повышения качества и возможности стабилизации опорного напряжения.
Специалисты заводов-изготовителей рекомендуют соединять данный вывод с общим проводом через емкость не менее 1 мкФ для повышения качества и возможности стабилизации опорного напряжения.
- Ограничение тока (ILIM). Если показатели напряжения на данном выводе существенно превышают установленное (как правило, около 1 В), то контроллер автоматически закрывает силовые ключи. В случаях, когда показатель напряжения превышает второе пороговое значение (в пределах 1,5-2 В), устройство тут же обнуляет напряжение на подключении к мягкому старту.
- Мягкий старт (SS). Показатель напряжения на данном выходе определяет максимально допустимую ширину будущих модулируемых импульсов. На данный вывод подает ток установленной величины. Если между ним и всеобщим кабелем вмонтировать дополнительную емкость, то она будет медленно, но уверенно заряжаться, что приведет к постепенному расширению каждого импульса от минимума вплоть до окончательного расчетного значения. Благодаря этому можно обеспечить плавное, а не стремительное нарастание величин тока и напряжения в общей схеме устройства, благодаря чему такая система и заслужила свое название «мягкий старт».
 При этом, если специально ввести ограничение по напряжению на данном выводе, допустим, подключив делитель напряжения и систему диодов, можно и вовсе ограничить превышение импульсами некоего задаваемого значения ширины.
При этом, если специально ввести ограничение по напряжению на данном выводе, допустим, подключив делитель напряжения и систему диодов, можно и вовсе ограничить превышение импульсами некоего задаваемого значения ширины.
Частота работы устройств, синхронизация
Микросхемы ШИМ-контроллеров могут применяться для различных целей. Чтобы отладить их совместную работу с другими элементами устройства, следует разобраться, как устанавливать те или иные параметры работы контроллера и какие компоненты цепи за это отвечают.
- Резистор и емкость, задающие частоту работы всего устройства (RT, CT). Каждый контроллер может работать лишь на определенно заданной частоте. Каждый из импульсов следует лишь с этой частотой. Устройство может менять длительность импульсов, их форму и протяженность, но только не частоту. На практике это означает, что чем меньше протяженность импульса, тем длительнее пауза между ним и следующим. При этом частота следования всегда неизменна. Емкость, подключенная между ножкой CT и общим кабелем, и резистор, подключенный к выходу RT и общему кабелю, в комбинации могут задавать частоту, на которой будет работать контроллер.
- Синхроимпульсы (CLOCK). Весьма распространены случаи, в которых требуется отладить работу нескольких контроллеров так, чтобы выходные сигналы формировались синхронно. Для этого к одному из контроллеров (как правило, ведущему) требуется подключить частотозадающие емкость и резистор. На выходе CLOCK контроллера сразу же появятся короткие импульсы, соответствующие напряжению, которые подаются на аналогичные выходы всей группы устройств. Их принято называть ведомыми. Выводы RT таких контроллеров следует объединить с ножками VREF, а CT — с общим кабелем.
- Напряжение сравнения (RAMP). На этот вывод следует подавать сигнал пилообразной формы (напряжение). При возникновении синхроимпульса на выходе устройства образуется открывающее контрольное напряжение. После того как показатель напряжения на RAMP становится больше в несколько раз, чем величина выходного напряжения на усилителе ошибки, на выходе можно наблюдать импульсы, отвечающие закрывающему напряжению. Длительность импульса может рассчитывать от момента возникновения синхроимпульса вплоть до момента многократного превышения показателя напряжения на RAMP над величиной выходного напряжения усилителя ошибки.
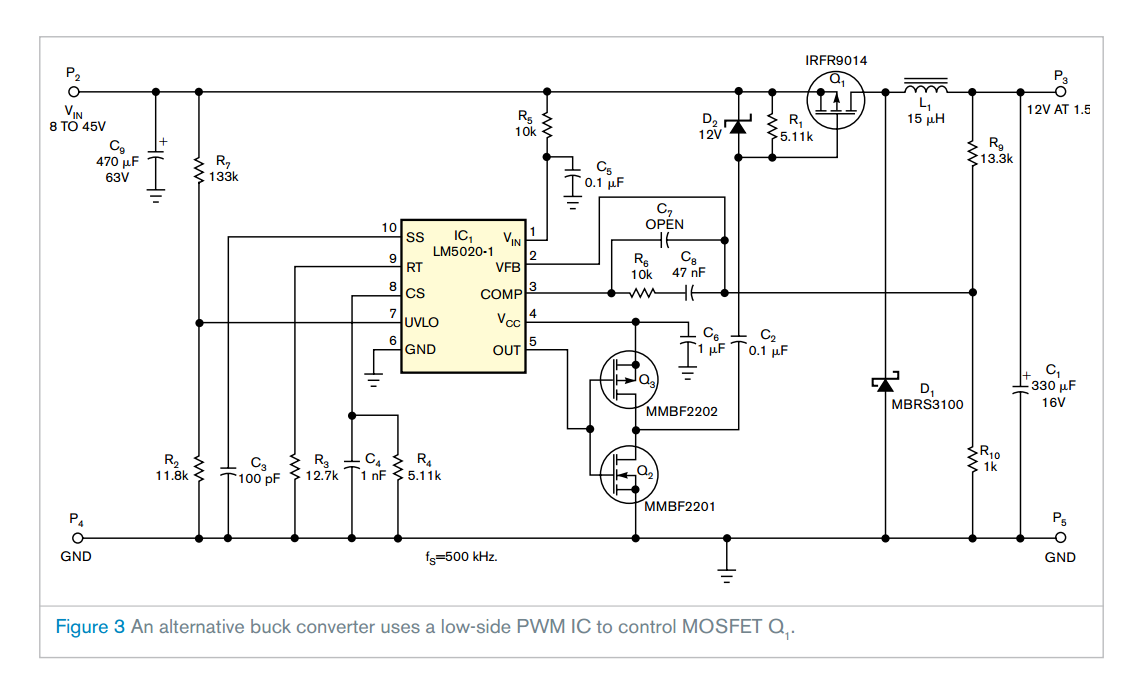
ШИМ-контроллеры в составе блоков питания
Блок питания является неотъемлемым элементом большинства современных девайсов. Срок его эксплуатации практически ничем не ограничен, но от его исправности во многом зависит безопасность работы подконтрольного устройства. Спроектировать блок питания можно и своими руками, изучив принцип его действия. Основная цель – формирование нужной величины напряжения питания, обеспечение её стабильности. Для большинства мощных устройств гальванической развязки, основанной на действии трансформатора, будет недостаточно, да и подобранный элемент явно удивит пользователей своими габаритами.
Увеличение частоты тока питания позволяет существенно уменьшить размеры используемых компонентов, что обеспечивает популярность блоков питания, работающих на частотных преобразователях. Один из самых простых вариантов реализации питающих элементов – блок-схема, состоящая из прямого и обратного преобразователей, генератора и трансформатора. Несмотря на видимую простоту реализации таких схем, на практике они демонстрируют больше недочетов, чем преимуществ.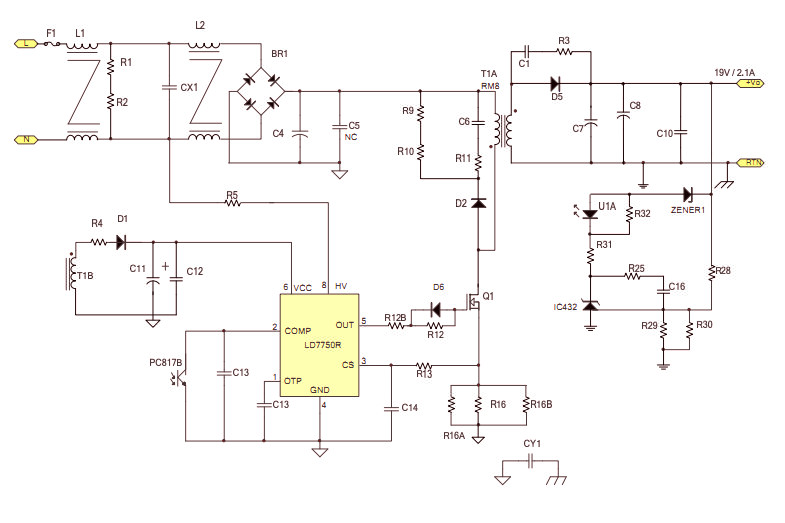 Большинство получаемых показателей стремительно изменяются под влиянием скачков напряжения питания, при загрузке выхода преобразователя и даже при увеличении температуры окружающей среды. ШИМ-контроллеры для блоков питания дают возможность стабилизировать схему, а также воплотить множество дополнительных функций.
Большинство получаемых показателей стремительно изменяются под влиянием скачков напряжения питания, при загрузке выхода преобразователя и даже при увеличении температуры окружающей среды. ШИМ-контроллеры для блоков питания дают возможность стабилизировать схему, а также воплотить множество дополнительных функций.
Составляющие схемы блоков питания с ШИМ-контроллерами
Типовая схема состоит из генератора импульсов, в основе которого лежит ШИМ-контроллер. Широтно-импульсная модуляция дает возможность собственноручно контролировать амплитуду сигнала на выходе ФНЧ, изменяя при необходимости длительность импульса или его скважность. Сильная сторона ШИМ – высокий КПД усилителей мощности, в особенности звука, что в целом обеспечивает устройствам довольно обширную сферу применения.
ШИМ-контроллеры для блоков питания могут использоваться в схемах с различными мощностями. Для реализации относительно маломощных схем необязательно включать в их состав большое число элементов – в качестве ключа может выступать обычный полевой транзистор.
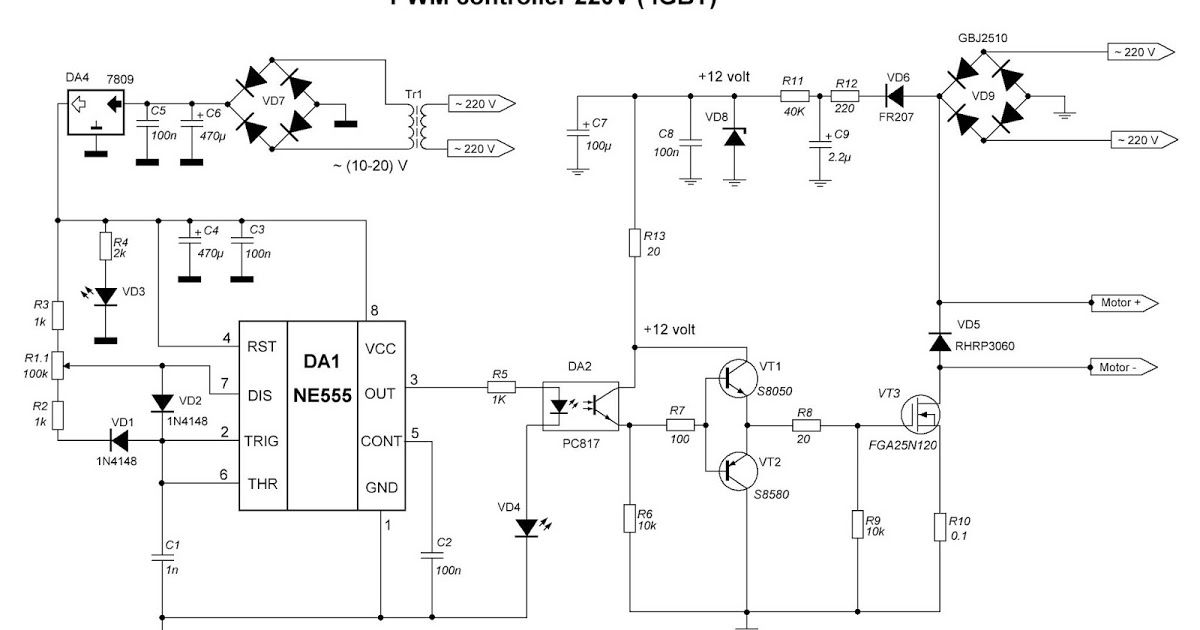
ШИМ-контроллеры для источников питания большой мощности могут иметь также элементы управления выходным ключом (драйверы). В качестве выходных ключей рекомендуется использовать IGBT-транзисторы.
Основные проблемы ШИМ-преобразователей
При работе любого устройства полностью исключить вероятность поломки невозможно, и преобразователей это тоже касается. Сложность конструкции при этом не имеет значения, проблемы в эксплуатации может вызвать даже известный ШИМ-контроллер TL494. Неисправности имеют различную природу – некоторые из них можно выявить на глаз, а для обнаружения других требуется специальное измерительное оборудование.
Чтобы узнать, как проверить ШИМ-контроллер, следует ознакомится со списком основных неисправностей приборов, а лишь позже – с вариантами их устранения.
Диагностика неисправностей
Одна из часто встречающихся проблем – пробой ключевых транзисторов. Результаты можно увидеть не только при попытке запуска устройства, но и при его обследовании с помощью мультиметра.
Кроме того, существуют и другие неисправности, которые несколько сложнее обнаружить. Перед тем как проверить ШИМ-контроллер непосредственно, можно рассмотреть самые распространенные случаи поломок. К примеру:
- Контроллер глохнет после старта – обрыв петли ОС, перепад по току, проблемы с конденсатором на выходе фильтра (если таковой имеется), драйвером; возможно, разладилось управление ШИМ-контроллером. Надо осмотреть устройство на предмет сколов и деформаций, замерить показатели нагрузки и сравнить их с типовыми.
- ШИМ-контроллер не стартует – отсутствует одно из входных напряжений или устройство неисправно. Может помочь осмотр и замер выходного напряжения, в крайнем случае, замена на заведомо рабочий аналог.
- Напряжение на выходе отличается от номинального – проблемы с петлей ООС или с контроллером.
- После старта ШИМ на БП уходит в защиту при отсутствии КЗ на ключах – некорректная работа ШИМ или драйверов.
- Нестабильная работа платы, наличие странных звуков – обрыв петли ООС или цепочки RC, деградация емкости фильтра.

В заключение
Универсальные и многофункциональные ШИМ-контроллеры сейчас можно встретить практически везде. Они служат не только в качестве неотъемлемой составляющей блоков питания большинства современных устройств — типовых компьютеров и других повседневных девайсов. На основе контроллеров разрабатываются новые технологии, позволяющие существенно сократить расход ресурсов во многих отраслях человеческой деятельности. Владельцам частных домов пригодятся контроллеры заряда аккумуляторов от фотоэлектрических батарей, основанные на принципе широтно-импульсной модуляции тока заряда.
Высокий коэффициент полезного действия делает разработку новых устройств, действие которых основывается на принципе ШИМ, весьма перспективной. Вторичные источники питания — вовсе не единственное направление деятельности.
Похожие статьи
- Микросхема 555: описание и практическое применение
- ШИМ-регулятор.
 Широтно-импульсная модуляция. Схема
Широтно-импульсная модуляция. Схема - ПИД-регулятор: описание, состав, настройка
- Как сделать импульсные блоки питания своими руками?
- Операционный усилитель LM358: схема включения, аналог, datasheet
- Импульсный блок питания: характерные особенности
Также читайте
Схема линейного ШИМ-контроллера (регулятора мощности) на логическом элементе CD4069
Простой ШИМ регулятор мощности – преобразователь входного напряжения в
длительность (скважность) без использования специализированных микросхем
Чем больше длительность импульса – тем выше действующее (эффективное) значение выходного напряжения, а соответственно, и мощность, поступающая в нагрузку. Управление длительностью импульсов в ШИМ-регуляторах можно производить как при помощи переменного резистора, так и посредством подачи на управляющий вход регулирующего напряжения, причём зависимость преобразования (в большинстве случаев) желательно иметь линейной. И если в первом случае никаких сложностей с поиском схемотехнических решений таких преобразователей не возникает, то во втором – источники, как правило, отсылают нас к применению специализированных ИМС ШИМ-контроллеров.
Ликвидируем данный пробел в информации, изобразив схему простого линейного ШИМ-контроллера – регулятора мощности, выполненного всего на одном элементе
базовой КМОП логики.
Рис.1 Схема линейного ШИМ-контроллера и регулятора мощности на логическом элементе
Контроллер выполнен на логическом элементе CD4069 (К561ЛН5), содержащем внутри себя 6 инверторов стандартной КМОП логики. Диапазон напряжений питания микросхемы: +3…15V, корпус – DIP-14/SO-14.
Триггер Щмитта (на DD1.1, DD1.2) и интегратор (DD1.3) образуют генератор треугольного напряжения с выходной амплитудой ~ ±Еп/4. Подстроечный резистор
R2 позволяет установить точное значение этой амплитуды.
При указанных на схеме номиналах элементов частота колебаний генератора составляет около 10 кГц.
Вентили DD1.4 и DD1.5 образуют компаратор с напряжением срабатывания ~ ±Еп/2. С одной стороны на вход этого компаратора поступает переменное напряжение
генератора треугольной формы, с другой – напряжение, идущее через резистор R5 с управляющего входа ШИМ-контроллера (Евх). Номиналы резисторов R5 и R6
подобраны таким образом, чтобы при нулевом напряжении на управляющем входе компаратор находился на грани срабатывания, т.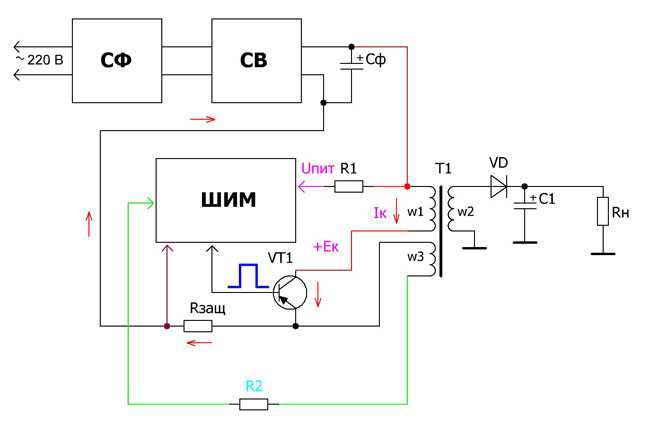 е. длительность импульсного
сигнала на 10 выводе CD4069 имела минимальную длительность, близкую к нулю.
е. длительность импульсного
сигнала на 10 выводе CD4069 имела минимальную длительность, близкую к нулю.
Проиллюстрируем работу ШИМ-регулятора диаграммами:
Рис.2 Диаграммы, поясняющие работу ШИМ-контроллера при Еп = 10 В
Как можно увидеть, при Евх = 0 длительность выходных импульсов минимальна (практически равна нулю), скважность максимальна (стремится к ∞) – мощность в нагрузку не поступает.
При Евх ≈ 0,66Еп длительность выходных импульсов максимальна и практически равна периоду колебаний генератора, скважность минимальна (близка к 1) – вся мощность от источника питания без ослабления поступает в нагрузку.
Поскольку ШИМ-регулятор осуществляет линейное преобразование, то и длительность выходных импульсов в промежуточных точках линейно зависит от значения подаваемого
на управляющий вход напряжения, т. е. при Евх = 0,33Еп длительность равна половине периода колебаний, а скважность рана 2 (меандр).
Посредством импульсов, сформированных на выходе DD1.6 (12 вывод), можно осуществлять инверсную регулировку ШИМ, то есть при нулевом напряжении на управляющем входе мощность в нагрузке будет максимальной.
Цепь на транзисторах VT1…VT3, изображённая на Рис.1, предназначена для управления мощной нагрузкой. При подобном построении мощность нагрузки
ограничена лишь параметрами выходного транзистора VT3 и может составлять многие сотни ватт. При этом верхний (по схеме) вывод нагрузки никто не мешает
подключить и к отдельному источнику питания с любым (допустимым для выходного транзистора) значением напряжения.
Транзисторы VT1, VT2 – любые маломощные комплементарные транзисторы. Они предназначены для быстрой перезарядки высокой входной ёмкости мощного полевика,
что способствует снижению длительности переходных процессов и существенно повышает КПД устройства.
Если напряжение питания ШИМ-контроллера ниже 8…9 вольт, то выходной транзистор желательно выбирать из числа MOSFET-ов с
низким напряжением отсечки.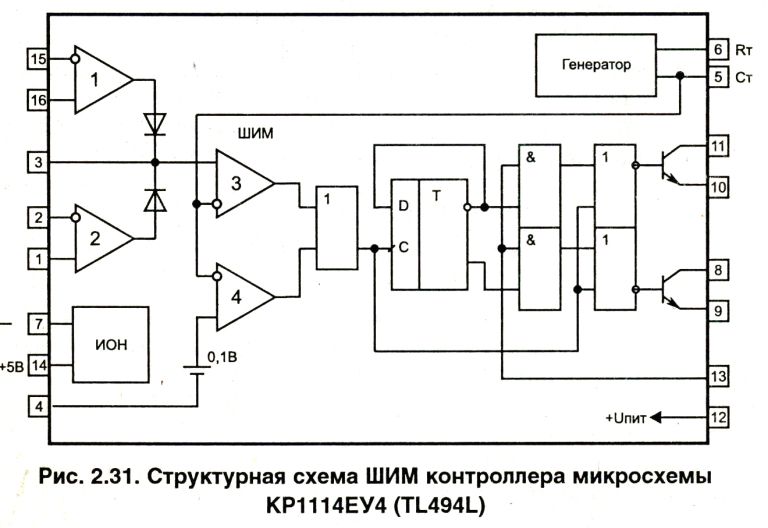
Настройка контроллера сводится к установке подстроечного резистора в положение, при котором при нулевом напряжении на управляющем входе, длительность выходных импульсов будет минимальной, но всё ж таки возможной для визуальной фиксации на осциллографе.
Как сделать схему регулятора скорости двигателя постоянного тока
Перейти к содержимому
от Afzal Rehmani
9618 просмотров Управление направлением и скоростью (об/мин) для двигателей переменного/постоянного тока может быть достигнуто различными методами. Крайне важно иметь возможность контролировать скорость и направление приводов постоянного тока в таких отраслях, как текстильная, механическая и электрическая, для ряда производственных процессов. В этой статье мы рассмотрим, как легко спроектировать ШИМ-контроллер двигателя постоянного тока с микросхемой таймера NE555, используя и небольшое количество других компонентов.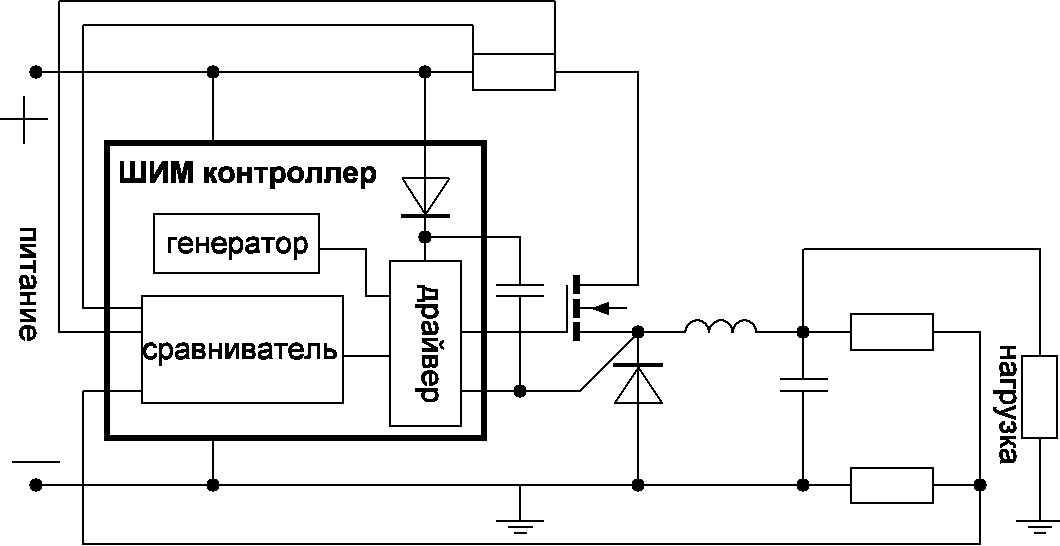
ШИМ (широтно-импульсная модуляция) — это метод аналогового управления, с помощью которого мы можем генерировать переменный прямоугольный сигнал, быстро включая и выключая питание любого электронного устройства. Среднее напряжение зависит от скважности сигнала. Здесь микросхема точного таймера NE555 работает в нестабильном режиме, чтобы генерировать автономный ШИМ-сигнал. Вы можете прочитать нашу предыдущую статью о нестабильных мультивибраторах, чтобы узнать больше об их работе.
PCBWay обязуется удовлетворять потребности своих клиентов из разных отраслей в отношении качества, доставки, экономической эффективности и любых других требований. Как один из самых опытных производителей печатных плат в Китае. Они гордятся тем, что являются вашими лучшими деловыми партнерами, а также хорошими друзьями во всех аспектах ваших потребностей в печатных платах.
5$ Прототип печатной платы
https://www.youtube.com/watch?v=rIMQaCewrjY&t=77s
Аппаратные компоненты
Для сборки этого проекта вам потребуются следующие детали
S. No No | Component | Value | Qty |
|---|---|---|---|
| 1) | DC Motor | 12V/6000 – 10000RPM | 1 |
| 2) | PWM DC Motor Controller PCB | PCBWay | 1 |
| 3) | Timer IC | NE555 | 1 |
| 4) | Darlington Transistor | TIP122/NPN | 1 |
| 5) | Potentiometer | 100K | 1 |
| 6) | Diode | 1N4007 | 3 |
| 7) | Capacitors | 100nF | 2 |
| 8) | Resistors | 1K | 2 |
| 9) | Soldering Iron | 45W – 65W | 1 |
| 10) | Soldering Wire with Flux | – | 1 |
| 11) | DC Battery | 12V | 1 |
| 12) | Battery Clips | – | 1 |
| 13) | Soldering Stand | — | 1 |
| 14) | Джампер -провода | — | Согласно необходимости |
0025
Схема работает следующим образом: микросхема таймера 555 настроена на работу в нестабильном мультивибраторном режиме, генерирующем прямоугольную волну (ШИМ). Потенциометр 100К используется для управления периодом рабочего цикла таймеров 555, эффективно контролируя скорость двигателя. Клемма управления микросхемы таймера подключена к конденсатору емкостью 100 нФ для устранения внешнего шума на клемме. Контакт 4 сброса с активным низким уровнем подключен к Vcc схемы, чтобы предотвратить нежелательный сброс выхода.
Потенциометр 100К используется для управления периодом рабочего цикла таймеров 555, эффективно контролируя скорость двигателя. Клемма управления микросхемы таймера подключена к конденсатору емкостью 100 нФ для устранения внешнего шума на клемме. Контакт 4 сброса с активным низким уровнем подключен к Vcc схемы, чтобы предотвратить нежелательный сброс выхода.
Если двигатель, которым вы хотите управлять, превышает номинальный выходной ток стока/истока таймера 555, равный 200 мА, вы можете использовать пару транзисторов Дарлингтона/МОП-транзистор (TIP122) для управления двигателем постоянного тока, так как он может выдерживать токи до 5 А. Кроме того, используйте обратноходовой диод (1N4007) параллельно двигателю, чтобы предотвратить скачки напряжения.
Похожие сообщения:
Цепь ШИМ управления скоростью двигателя постоянного тока
by Farwah Nawazi
4864 просмотраВведение
Двигатели постоянного тока имеют широкий спектр применения в электронных устройствах.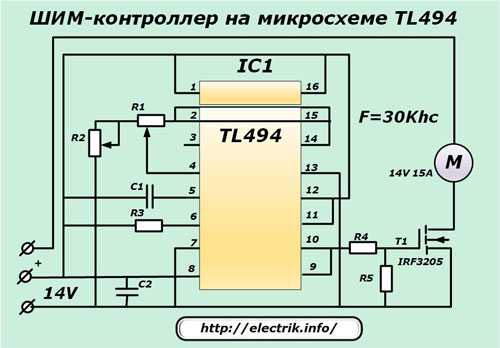 Если вы изучаете электрику или электронику, то вы, должно быть, изучили ее внутреннюю структуру и работали со своими учителями. Если вы человек, который любит делать проекты, то вы, должно быть, использовали его в различных проектах. Или, если вы человек, который просто исследует промышленное и другое простое оборудование, то вы также должны были видеть его в разных местах. Потому что, по-видимому, двигатели постоянного тока есть во всех остальных приложениях. Итак, важно обсудить управление скоростью двигателя постоянного тока.
Если вы изучаете электрику или электронику, то вы, должно быть, изучили ее внутреннюю структуру и работали со своими учителями. Если вы человек, который любит делать проекты, то вы, должно быть, использовали его в различных проектах. Или, если вы человек, который просто исследует промышленное и другое простое оборудование, то вы также должны были видеть его в разных местах. Потому что, по-видимому, двигатели постоянного тока есть во всех остальных приложениях. Итак, важно обсудить управление скоростью двигателя постоянного тока.
Разным приложениям требуются разные скорости, но многим приложениям нужны разные уровни скорости. Например, роботизированные автомобили могут не хотеть, чтобы скорость назад была такой же, как скорость вперед. Точно так же некоторые промышленные устройства работают на разных уровнях скорости. Итак, в этом уроке мы собираемся создать и понять работу «ШИМ-схемы управления скоростью двигателя постоянного тока»
Говоря о ШИМ, широтно-импульсная модуляция — это сигналы прямоугольной формы, которые переключаются между состояниями ВКЛ и ВЫКЛ. Широтно-импульсная модуляция — это прежде всего метод, который используется для уменьшения средней мощности электрического сигнала. Следовательно, эта схема может управлять яркостью светодиодов. Он также имеет различные другие приложения в различных электронных схемах. Например, он может контролировать скорость двигателя. Для генерации импульсов используется термин, называемый рабочим циклом. Отношение рабочего цикла времени, когда сигнал находится на высоком уровне, к общему времени, которое требуется для завершения одного цикла. Выражается в процентах
Широтно-импульсная модуляция — это прежде всего метод, который используется для уменьшения средней мощности электрического сигнала. Следовательно, эта схема может управлять яркостью светодиодов. Он также имеет различные другие приложения в различных электронных схемах. Например, он может контролировать скорость двигателя. Для генерации импульсов используется термин, называемый рабочим циклом. Отношение рабочего цикла времени, когда сигнал находится на высоком уровне, к общему времени, которое требуется для завершения одного цикла. Выражается в процентах
Характеристики драйвера двигателя L293D
- Он имеет широкий диапазон напряжения питания от 4,5 В до 36 В
- Кроме того, он включает в себя отдельный источник питания входной логики.
- Драйвер также имеет внутреннюю защиту от электростатических разрядов.
- Обеспечивает вход с высокой помехоустойчивостью.
- Выходной ток: 600 мА
- Пиковый выходной ток: 1,2 А
Требуемое аппаратное обеспечение
| Sr | Компоненты | |
|---|---|---|
| 1 | Timer IC (NE555) | 1 |
| 2 | IC (L293D) | 1 |
| 3 | DC Motor (1000 RPM) | 1 |
| 4 | Potentiometer (100KΩ) | 1 |
| 5 | Diode (1N4007) | 2 |
| 6 | Switch | 1 |
| 7 | Bread Board | 1 |
| 8 | Electrolysis Capacitor (0. 1μF) 1μF) | 1 |
| 9 | Ceramic Capacitor (1μF) | 1 |
| 10 | Resistor (1KΩ,100Ω) | 1, 2 |
| 11 | Подключающие провода | — |
| 12 | 9V Батарея | 1 |