Что представляет собой USB-TTL конвертер на микросхеме CH340. Как работает данное устройство. Каковы его основные характеристики и преимущества. Как правильно подключить и настроить USB-TTL конвертер на CH340. Как установить необходимые драйвера для Windows.
Что такое USB-TTL конвертер на микросхеме CH340
USB-TTL конвертер на микросхеме CH340 представляет собой устройство для преобразования интерфейса USB в последовательный интерфейс UART. Он позволяет подключать устройства с UART-интерфейсом к компьютеру через USB-порт.
Основные особенности конвертера на CH340:
- Поддержка USB 2.0
- Скорость передачи данных до 2 Мбит/с
- Совместимость с TTL-уровнями 3.3В и 5В
- Эмуляция виртуального COM-порта в системе
- Низкая стоимость микросхемы
Благодаря этим характеристикам, конвертеры на CH340 получили широкое распространение и часто используются в различных устройствах и модулях для связи с компьютером.
Схема и принцип работы USB-TTL конвертера на CH340
Рассмотрим типовую схему USB-TTL конвертера на микросхеме CH340:

[Здесь можно было бы вставить схему конвертера, но у меня нет возможности отображать изображения]
Основные элементы схемы:
- Микросхема CH340G
- USB-разъем типа B
- Кварцевый резонатор 12 МГц
- Стабилизатор напряжения 3.3В
- Выходные контакты RX, TX, GND, VCC
Принцип работы конвертера:
- USB-сигналы поступают на микросхему CH340 через USB-разъем
- CH340 преобразует USB-сигналы в последовательные данные UART
- Преобразованные сигналы выводятся через контакты TX и RX
- В системе создается виртуальный COM-порт для работы с конвертером
Таким образом, CH340 выполняет функцию «моста» между USB и UART интерфейсами, позволяя подключать UART-устройства к USB-порту компьютера.
Основные характеристики USB-TTL конвертера на CH340
Рассмотрим ключевые технические характеристики конвертера на микросхеме CH340:
- Напряжение питания: 5В (от USB)
- Поддерживаемые скорости передачи данных: от 50 бод до 2 Мбит/с
- Буфер приема/передачи: 256 байт
- Поддержка управляющих сигналов: RTS, DTR, DCD, RI
- Совместимость с USB 1.1/2.0
- Поддержка режимов Full-Speed (12 Мбит/с) и Low-Speed (1.5 Мбит/с)
- Рабочая температура: от -40°C до +85°C
- Низкое энергопотребление: около 10 мА
Эти характеристики обеспечивают широкие возможности применения конвертера в различных проектах, требующих подключения по UART.

Преимущества использования конвертера на CH340
Конвертеры на базе микросхемы CH340 имеют ряд преимуществ по сравнению с аналогами:
- Низкая стоимость при хороших характеристиках
- Высокая надежность и стабильность работы
- Простота использования и подключения
- Широкая распространенность и доступность
- Наличие драйверов для всех популярных ОС
- Компактные размеры модулей на CH340
Эти преимущества сделали CH340 одним из самых популярных решений для создания USB-UART конвертеров в любительских и коммерческих проектах.
Подключение и настройка USB-TTL конвертера на CH340
Для правильного подключения и настройки конвертера на CH340 необходимо выполнить следующие шаги:
- Подключить конвертер к USB-порту компьютера
- Установить необходимые драйвера (если не установились автоматически)
- Определить номер виртуального COM-порта в системе
- Настроить параметры порта (скорость, четность и т.д.) в используемой программе
- Подключить UART-устройство к выводам конвертера (TX, RX, GND)
При подключении важно соблюдать правильность соединения сигнальных линий:
- TX конвертера -> RX устройства
- RX конвертера -> TX устройства
- GND конвертера -> GND устройства
Также необходимо убедиться в совпадении уровней напряжения логических сигналов конвертера и подключаемого устройства (3.3В или 5В).
Установка драйверов CH340 в Windows
Для корректной работы конвертера на CH340 в Windows необходимо установить соответствующие драйвера. Процесс установки выглядит следующим образом:
- Скачать актуальную версию драйвера с официального сайта производителя
- Распаковать архив с драйвером
- Подключить конвертер к USB-порту компьютера
- Открыть Диспетчер устройств Windows
- Найти неопознанное устройство CH340
- Выбрать «Обновить драйвер» и указать путь к распакованным файлам
- Дождаться завершения установки драйвера
После успешной установки драйвера в системе появится новый виртуальный COM-порт, который можно использовать для работы с конвертером.
Типичные проблемы при работе с CH340 и их решение
При использовании USB-TTL конвертера на CH340 могут возникать некоторые проблемы. Рассмотрим наиболее распространенные из них и способы их решения:
Устройство не определяется системой
Возможные причины и решения:
- Не установлен или некорректно установлен драйвер — переустановить драйвер
- Неисправен USB-кабель — заменить кабель
- Поврежден USB-порт компьютера — попробовать другой порт
Отсутствует передача данных
Что проверить:
- Правильность подключения линий TX и RX
- Совпадение настроек скорости и формата передачи
- Уровни напряжения сигналов конвертера и устройства
Нестабильная работа на высоких скоростях
Возможные решения:
- Использовать качественный экранированный кабель
- Уменьшить длину проводов подключения
- Проверить качество питания конвертера
При возникновении других проблем рекомендуется обратиться к документации производителя или на профильные форумы.
Конвертер USB-TTL на микросхеме Ch440. Схема, характеристики. Установка драйвера.
USB-TTL конвертер построенный на микросхеме Ch440G
Это – преобразователе интерфейса USB в UART. Эта микросхема приобретает все большую популярность, успешно конкурируя с конвертером интерфейсов PL2303.
Ch440 уже стала стандартным преобразователем интерфейсов для китайских клонов контроллеров Ардуино. На базе этой микросхемы был разработан модуль, аналог модуля PL2303 USB UART BOARD. Вернее несколько типов модулей. В этом материале будет рассказано о самом популярном варианте конвертера Ch440.
С помощью модуля Ch440 легко подключить любое устройство, имеющее интерфейс UART к компьютерному порту USB. При несложной доработке (требуются только преобразователи уровней сигналов) к компьютеру могут быть подключены устройства с интерфейсами: COM, RS232, RS422, RS485, IrDA. Схемы подключения к некоторым из этих интерфейсов приведены в предыдущей публикации о микросхеме Ch440G.
Самое приятное, что такой способ преобразования интерфейсов не требует изменения кода программ верхнего уровня. Даже программы, разработанные для компьютерного COM порта в те времена, когда интерфейс USB еще не существовал, работают с мостами интерфейса USB.
Даже программы, разработанные для компьютерного COM порта в те времена, когда интерфейс USB еще не существовал, работают с мостами интерфейса USB.
Конвертер эмулирует работу стандартного COM порта. На компьютер устанавливается драйвер микросхемы Ch440. При каждом подключении модуля к USB порту компьютера в системе появляется виртуальный COM порт. Программа для стандартного COM порта может работать с этим портом, не подозревая, что он виртуальный. Таким образом, в системе появляется еще один COM порт, физически расположенный вне компьютера.
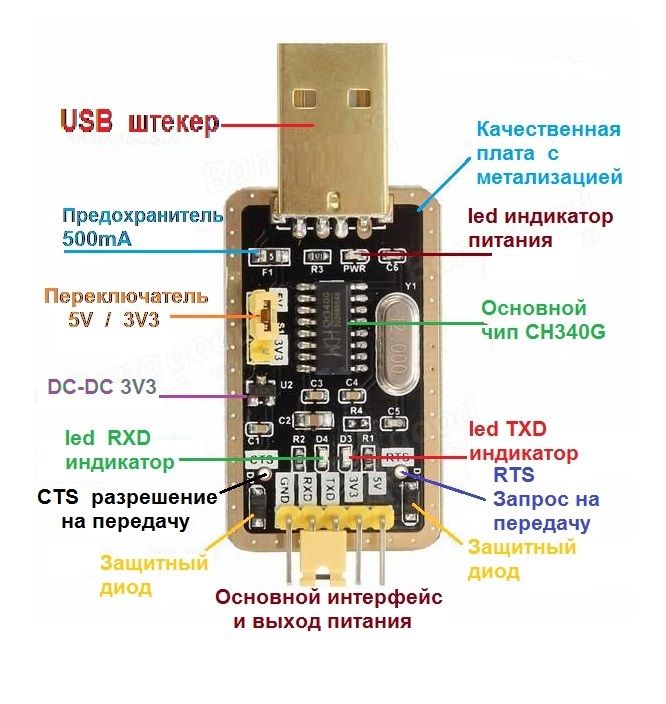
Сигналы интерфейса UART модуля.
На разъеме модуля 6 контактов, через которые подключается UART устройство.
| № | Название | Направление, тип | Назначение |
| 1 | 5 V | питание | Питание 5 В от интерфейса USB. Может быть использовано для питания устройства UART. |
| 2 | VCC | питание | Питание микросхемы Ch440G.
|
| 3 | 3V3 | питание | Опорное напряжение для USB интерфейса.
|
| 4 | TXD | выход | Передача данных |
| 5 | RXD | вход | Прием данных |
| 6 | GND | питание | Общий провод (земля) |
Для подключения UART устройства к модулю необходимо:
Выбрать режим питания;
- 5 В – установить перемычку между 1 и 2 выводами;
- 3,3 В – установить перемычку между 2 и 3 выводами.

- Подключить устройство к общему проводу GND и контактам обмена данными RXD и TXD.
- При необходимости можно использовать сигнал 5 V (вывод 1) для питания UART устройства.
Рядом с разъемом модуля размещены светодиоды отображающие:
- наличие питания модуля;
- состояние сигнала TXD;
- состояние сигнала RXD.
- Светодиоды светятся при активном состоянии сигналов – низком уровне.
Самая распространенная схема выглядит так.
Микросхема Ch440G включена по стандартной схеме. Питание 3,3 В формируется из сигнала 5 В интерфейса USB за счет падения напряжения на открытых диодах LL4148. Больше пояснять нечего.
Установка драйвера преобразователя интерфейсов Ch440.
Под Windows 7 драйвер устанавливается в следующей последовательности.
Открываем диспетчер задач Windows. Для этого нажимаем Пуск -> Панель управления -> Диспетчер устройств.
Открываем закладку Порты (COM и LPT).
Подключаем модуль Ch440 к порту USB компьютера. В диспетчере устройств появляется новое устройство USB.2-Serial с предупреждающим желтым знаком. Операционная система не смогла установить драйвер для модуля.
Скачиваем и запускем файл установщика драйвера ch441ser.exe. Файлы автоматически разархивируются. Появляется окно.
Нажимаем кнопку INSTALL.
После непродолжительной установки появляется сообщение об ее успешном завершении.
В диспетчере устройств появляется новое устройство USB-SERIAL Ch440. Это и есть новый COM порт, в примере это порт с номером 5.
При желании номер порта можно изменить.
Для этого нужно нажать на нужный COM порт в «Диспетчере оборудования» правой кнопкой мыши, выбрать пункт Свойства.
Дальше переходим на вкладку Параметры порта.
Нажимаем кнопку Дополнительно
Теперь остается выбрать сыободный номер порта.
Теперь при каждом подключении модуля Ch440 к компьютеру в системе будет появляться виртуальный COM порт.
Внимание!!! Надо только помнить, что при подключении модуля к другому USB порту может измениться номер и виртуального COM порта.
Процессорный модуль IMX287 c USB – ЗАО «НПФ Прорыв»
Primary Color
Direction
Left To RightRight To Left| ТК16L.10 | ТК16L.11 | ТК16L.14 (GSM) |
ТК16L.31 | E-422 0.02/1.02 | E-422.GSM | |
|---|---|---|---|---|---|---|
| Телескоп+ | Телескоп+ | Телескоп+ | Телескоп+ | Телескоп+, Пирамида, Альфа ЦЕНТР | Телескоп+, Пирамида, Альфа ЦЕНТР | |
| Потребляемая мощность, не более | 5 Вт | 5 Вт | 15 ВА | 30 ВА | 5 ВА | 15 ВА |
| Питание | 9-36В DC | 9-36В DC | 100-260В AC | 100-260В AC | 18-36В DC | 100-260В AC |
| Резервное питание | нет | нет | нет | есть | есть | нет |
| Диапазон рабочих температур | от -40° до +60°C | от -40° до +60°C | от -30° до +60°C | от -40°/-20° до +60°C | от -40° до +60°C | от -30° до +60°C |
| Относительная влажность, %, не более | 95% при t=35°C | |||||
| Габаритные размеры | 102 х 202 х 45 мм | 102 х 142 х 45 мм | 102 х 202 х 45 мм | 230 х 264 х 103 мм | 106 х 90 х 58 мм | 159 х 94 х 58 мм |
| Масса не более | 0,8 кг | 0,7 кг | 1,2 кг | 2 кг | 0,5 кг | 0,7 кг |
Кол.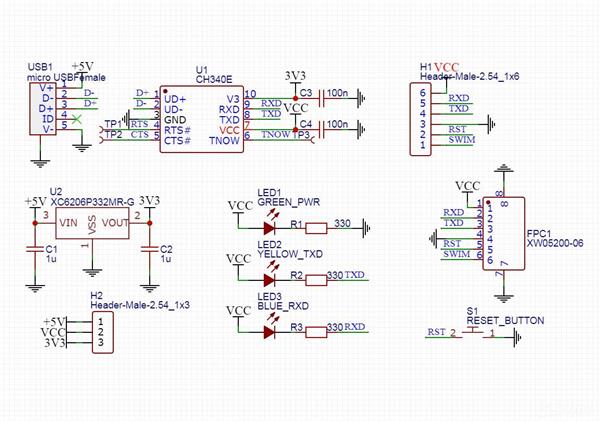 аналоговых входов. Диапазон входных сигналов для датчиков с токовым выходом 0-20 мА. аналоговых входов. Диапазон входных сигналов для датчиков с токовым выходом 0-20 мА. |
8 | 4 | 4 | 2 | ||
| Разрядность АЦП. | 12 | 12 | 12 | 12 | ||
| Аналоговые входы. Диапазон входных сигналов для датчиков напряжения. | 0-2.5 В | 0-2.5 В | 0-2.5 В | 0-2.5 В | ||
| Погрешность преобразования напряжения в код для указанного диапазона входных напряжений, не более | 10 мВ | 10 мВ | 10 мВ | 10 мВ | ||
| Дискретные входы (12-24 В) оптронная развязка 1500 кВ защита от статического напряжения, импульсных помех, пропадания напряжения. | 32 | 4 | 8 | 2 | 0/2 | 2 |
| Гальванически развязанный порт телеуправления | 2 (DC 3 А, 30 В / AC 3 А, 220 В) | 2 (DC 2 А, 60 В) | 1/1 (DC 2 А, 60 В) | 1 (DC 2 А, 60 В) | ||
| Поддержка видеокамер | есть | есть | есть | |||
Максимальное количество аналоговых датчиков для опроса при подключении через ПИК24/ТМДА24, шт. |
519 | 516 | 516 | 1024 | 1024/512 | 514 |
| Максимальное количество дискретных датчиков для опроса при подключении через ПИК24/ТМДА24, шт. | 1056 | 1028 | 1032 | 2048 | 2048/1024 | 1024 |
| Максимальное количество устройств телеуправления при подключении через ТМУ16, шт. | 1026 | 1026 | 1026 | 2048 | 2048/1024 | 1024 |
| * Рекомендуемое количество счетчиков для опроса при подключении счетчиков через интерфейс RS-422/RS-485, шт. | 16 | 16 | 16 | 128 | 32/16 | 16 |
| **Объем встроенного ОЗУ (SDRAM) | 64/128 МБ | 64/128 МБ | 64/128 МБ | 64/128 МБ | 64/128 МБ | 64/128 МБ |
| **Объем встроенного ПЗУ (FLASH) | 32/512 МБ | 32/512 МБ | 32/512 МБ | 32/512 Мб | 32/512 МБ | 32/512 МБ |
**Объем встроенного ПЗУ (FLASh3) для процессорных модулей CP16L-12, CP16L-20, i. MX287 MX287 |
512 МБ | 512 МБ | 512 МБ | 512 МБ | 512 МБ | 512 МБ |
| **Объем памяти для хранения архивов | 32/512 МБ | 32/512 МБ | 32/512 МБ | 2/4 ГБ | 32/512 МБ | 32/512 МБ |
| Хранение данных об электропотреблении (профиль нагрузки счетчиков), не менее | 45 суток | 45 суток | 45 суток | 4 лет | 45 суток | 45 суток |
| Время сохранения измерительной информации в устройстве при пропадании напряжения питания | 10 лет | 10 лет | 10 лет | 10 лет | 10 лет | 10 лет |
| Основная абсолютная погрешность при измерении времени в условиях отсутствия внешней синхронизации | ±3 с в сутки | ±3 с в сутки | ±3 с в сутки | ±3 с в сутки | ±3 с в сутки | ±3 с в сутки |
| Порт Ethernet 10/100 Mbit | 1 | 1 | 1 | 2 | 1/1 | 1 |
| Независимые порты RS-422/485 гальванически изолированные |
2 + |
2 + |
2 + |
4*** + |
4/2 + |
2 + |
| Порт RS-232 | 2 | 1 | 1 | 2*** | нет/2 | 1 |
| Порт USB device/host | 1/1 | нет/1 | нет/1 | |||
| Цветной графический дисплей 800х480 Touch Screen | Нет | Нет | Нет | Есть | Нет | Нет |
| Процессор | i. MX287 MX287 |
i.MX287 | i.MX287 | Intel/i.MX287 | i.MX287 | i.MX287 |
| Крепление | На стену, на DIN-рейку | На стену, на DIN-рейку | На стену, на DIN-рейку | На стену | На DIN-рейку | На DIN-рейку |
| Среднее время наработки на отказ, час | 105000 | 120000 | 120000 | 120000 | 120000 | 120000 |
| Cтепень защиты | IP52 | IP52 | IP52 | IP52 | IP50 | IP50 |
*Реальные требования по количеству подключаемых счетчиков электроэнергии формируются на основании требований проекта к типам счетчиков электроэнергии, динамике и типам обрабатываемых информационных потоков, с учетом их объемов, применяемых методов обработки и требований по быстродействию. За консультацией вы можете обратиться в службу технической поддержки [email protected].
**Объем памяти (МБ) в зависимости от типа процессорного модуля
CP16L. 12 12 |
CP16L.20 | i.MX287 | |
|---|---|---|---|
| ОЗУ | 64 | 128 | 128 |
| FLASH | 32 | 512 | 512 |
| FLASh3 | 128 | 512 | 512 |
***Если в модификации ТК16L.31 два порта RS-232, то остается три порта RS-485.
Схема USB-изолятораи работа с ним
Вы здесь: Главная / Учебник по электронике / Схема USB-изолятора и работа с ним Швеция, который является одним из заядлых читателей этого блога, здесь он объясняет об устройстве USB-изолятора и о том, как его можно подключить при использовании осциллографа с ПК, чтобы защитить осциллограф и тестовую схему от случайного высокого напряжения. Давайте узнаем больше.
Circuit Concept#1
Некоторое время назад я купил двухканальный USB-осциллограф Digitech 40 МГц, который теперь хочу научиться использовать с ПК через USB.
Я слышал, что нужно соблюдать крайнюю осторожность при размещении заземления щупа осциллографа этого (и любого) осциллографа на тестовой схеме, если эта тестовая схема также подключена к потенциалу заземления сети, подключив ее к порту USB для включите его.
Неверное движение может вывести из строя тестовую схему и, возможно, осциллограф 🙁 Видео Дэйва из блога EEV объясняет опасности более ясно, чем я могу.
Одним из решений этой проблемы может быть размещение USB-изолятора между USB-входом тестовой схемы и ПК. Пример такого изолятора показан здесь:
Менее дорогая альтернатива многим другим невероятно дорогим изоляторам, также показанным на EBay, может быть действительно полезной. Может ли это быть полезным DIY-проектом для страниц Homemade Circuit Projects?
Спасибо, Джон Уотерман
Анализ идеи схемы
Спасибо, Джон,
Да, это определенно интересная концепция для изучения.
Тем не менее, это сложная схема, и я не думаю, что смогу разработать ее. Позвольте мне попробовать, я дам вам знать, если мне случится взломать его.
С уважением.
Схема #2
Привет, Swagatam,
Наконец-то я нашел схему изолятора. К сожалению, тот, что мне дали, был маленьким и нечетким. Пробовал повышать резкость в фотошопе, но все равно плохо. Это даст вам идею.
К сожалению, тот, что мне дали, был маленьким и нечетким. Пробовал повышать резкость в фотошопе, но все равно плохо. Это даст вам идею.
Детали:
Модуль цифрового изолятора USB с низким уровнем шума
Описание Этот модуль разработан на основе ADUM4160, высокоскоростного и низкоскоростного USB-изолятора 5 кВ.
Это хороший выбор для приложений, которым необходима изоляция между ПК и периферийным устройством. Этот модуль отличается низким уровнем шума, что очень подходит для устройств Hi-Fi.
Кроме того, имеется схема защиты от перегрузки по току. Когда в вашем устройстве произойдет короткое замыкание, источник питания будет отключен, чтобы защитить как ваше устройство, так и этот модуль.
Красный светодиод загорается при возникновении состояния перегрузки по току.
Особенности:
Совместимость с USB 2.0
Низкая и полная скорость передачи данных: 1,5 Мбит/с и 12 Мбит/с, выбирается с помощью перемычки Двунаправленная связь Встроенный LDO-регулятор для приложений с низким уровнем шума Широкий диапазон входной мощности: от +6 В до +24 В Защита нисходящего порта от перегрузки по току (Эта функция очень полезна для защиты вашего устройства от повреждения при коротком замыкании)
Circuit Concept#3
Еще раз приветствую Swagatam,
Полезный парень из Китая предоставил эту схему в формате PDF (прилагается). Теперь вы можете сориентироваться и изучить его 🙂
Теперь вы можете сориентироваться и изучить его 🙂
John
О Swagatam
Я инженер-электронщик (dipIETE), любитель, изобретатель, разработчик схем/печатных плат, производитель. Я также являюсь основателем веб-сайта: https://www.homemade-circuits.com/, где я люблю делиться своими инновационными схемами и учебными пособиями.
Если у вас есть какие-либо вопросы, связанные со схемой, вы можете общаться через комментарии, я буду очень рад помочь!
BuildYourCNC — Плата USB-интерфейса Mach4
инструкции
Схема подключения
Схема USB-контроллера Mach4:
Красные клеммы — сигналы шага и направления для подключения к драйверам шаговых двигателей.
Желтый — разъем USB
Коричневый — светодиод состояния
Синий — входные/выходные клеммы
Зеленый — разъем маховика
Размеры платы контроллера:
Установочные размеры составляют 69,85 мм по короткой стороне и 73,66 мм по длинной стороне.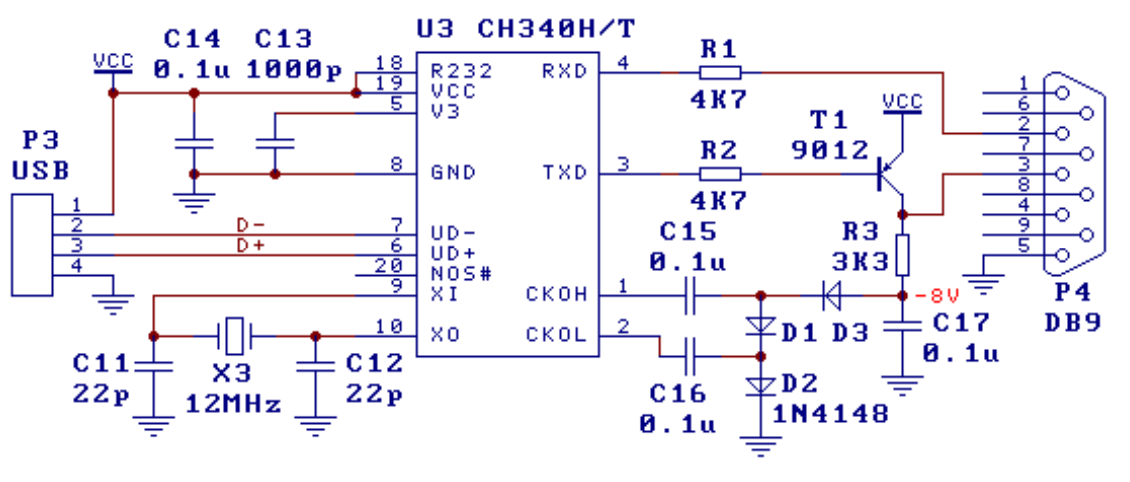
Габаритные размеры платы составляют 77,47 мм по короткой стороне и 81,28 мм по длинной стороне.
Первое использование:
В первый раз пользователю карты управления движением РНР потребуется выполнить некоторые необходимые настройки. Сначала установите программное обеспечение Mach4 и запомните, где установлено программное обеспечение Mach4. Скопируйте файл RnRMotion.dll подключаемых модулей в папку подключаемых модулей Mach4.
Подключите один конец USB-кабеля к универсальной плате управления движением RNR, а другой конец — к компьютеру. Этот продукт использует дизайн без привода. Система Windows может автоматически определять универсальную карту управления движением РНР и не требует от пользователя дополнительной установки драйвера устройства. Если щелкнуть значок установки драйвера устройства в правом нижнем углу рабочего стола, появится всплывающее диалоговое окно, в котором должно отображаться «RNR ECO MOTION 2.0».
Впервые подключена универсальная карта управления движением РНР, обнаружение системы занимает около 10 секунд. После того, как система правильно обнаружит карту управления движением RNR, загорится синий светодиод. Таким образом, мы знаем, что можно использовать универсальную карту управления движением RNR.
После того, как система правильно обнаружит карту управления движением RNR, загорится синий светодиод. Таким образом, мы знаем, что можно использовать универсальную карту управления движением RNR.
Затем запустите программу Mach4. При запуске ПО Mach4 появляется всплывающий диалог выбора управления.
Выберите [карта управления движением RnR -ECO-V2.0]. После вышеуказанной операции мы можем использовать программное обеспечение Mach4 для управления нашими станками и другим автоматическим оборудованием.
Импульсный выход:
Подключение (шагового/серво) драйвера двигателя Карта управления движением RNR может управлять 4 двигателями, соответственно названными X
ось, ось Y, ось Z и ось A. Сигнал управления двигателем каждой оси имеет 2: командный импульсный сигнал
P четырехосный (сигнал, соответствующий «XP», «YP», «ZP» и «AP», и сигнал направления D четырехосный (сигнал соответствует «XD», «YD», «ZD» и «AD»). Сигнальный интерфейс драйвера двигателя обычно имеет несимметричный или дифференциальный режим.
Дифференциальный режим:
Чтобы двигатель работал дифференциальным образом, подключите плату управления движением RNR как
. показано на изображении.
Односторонний:
Интерфейс однотактного драйвера двигателя обычно имеет две формы. Наиболее распространенным типом является то, что один конец его внутренней оптронной развязки сигналов подключен к внутреннему источнику питания 5 В. Этот тип интерфейса ввода драйвера такой же, как проводка карты контроллера движения RNR на этом изображении.
Дополнение Информация о сигналах драйвера и клемме 5В:
Импульсные выходные порты карты управления движением RNR включают в себя пару выходных клемм питания 5 В (5 В, GND), это обеспечивает клеммы питания 5 В постоянного тока для входного интерфейса драйвера двигателя для проводки. Никаких особых требований, пожалуйста, избегайте подключения других линий электропередач к этому интерфейсу. Когда направление движения оси совпадает с ожидаемым направлением движения во время реверсивной операции, выходной сигнал двигателя может быть изменен [(Motor Outputs)] в направлении) интерфейса [Mach4Dir Low Active Item] для изменения направления движения. Когда вал двигателя работает очень резко, полярность выходного импульса не требуется при обратной фазе драйвера двигателя. вы можете попробовать [(Motor Outputs)] Mach4 изменяет в интерфейсе конфигурации опцию [Pulse Low Active (активный низкий импульс)], чтобы изменить выход, иллюстрирующий полярность импульса.
Когда вал двигателя работает очень резко, полярность выходного импульса не требуется при обратной фазе драйвера двигателя. вы можете попробовать [(Motor Outputs)] Mach4 изменяет в интерфейсе конфигурации опцию [Pulse Low Active (активный низкий импульс)], чтобы изменить выход, иллюстрирующий полярность импульса.
Обратите внимание, что выходной сигнал карты управления движением RNR в это время равен «1» (высокий уровень), выходной сигнал оптрона драйвера двигателя равен «0»; Карта управления движением RNR выходной сигнал «0» (низкий уровень), выходной сигнал оптопары драйвера двигателя «1». Следовательно, выходы двигателя Mach4 должны быть настроены как Low Active. Способы настройки: Выберите меню [Set (Config)], выберите [port/pin pin (Ports and Pins)], выберите Motor output (Выход двигателя)] p, измененный как на изображении.
Другая форма контроллера двигателя в несимметричном режиме, оптопара с развязкой сигнала, один конец которой подключен к внутреннему заземлению питания. Этот тип интерфейса ввода драйвера представляет собой тот же RNR, что и схема подключения карты управления движением на этом изображении.
Этот тип интерфейса ввода драйвера представляет собой тот же RNR, что и схема подключения карты управления движением на этом изображении.
Настройка ведомой оси:
Некоторые механические устройства имеют портальную структуру, для которой может потребоваться привод с двумя двигателями. Карта управления движением РНР может быть предоставлена в качестве ведомой оси, это может быть
указан с помощью шагового двигателя оси A для перемещения гентри. вместе с шаговым двигателем оси X.
Чтобы установить ось A в качестве ведомой оси:
Выберите меню Mach4 [(Config)], выберите [(Slave Axis)]. Вы увидите диалоговое окно, как показано на рисунке
Ось A становится подчиненной осью оси X. Когда ось X движется, ось A будет двигаться X синхронно. Когда ось X выполняет операцию возврата в исходное положение, ось A автоматически балансируется (см. раздел «Автоматический возврат в исходное положение»).
Входные сигналы:
Универсальная плата управления перемещением RNR имеет четыре изолированных оптопарных сигнальных входа. При необходимости пользователь может гибко определить в качестве входных сигналов сигнал на ноже, сигнал возврата в исходное положение, сигнал остановки, входной сигнал концевого выключателя или определяемый пользователем входной сигнал. Схема входного сигнала платы кругового управления движением РНР показана на рисунке.
При необходимости пользователь может гибко определить в качестве входных сигналов сигнал на ноже, сигнал возврата в исходное положение, сигнал остановки, входной сигнал концевого выключателя или определяемый пользователем входной сигнал. Схема входного сигнала платы кругового управления движением РНР показана на рисунке.
Пользователь должен подключить клемму COM+ к внешнему положительному источнику питания 24 В постоянного тока 24 В постоянного тока, который должен быть источником питания постоянного тока; отрицательная клемма подключена к COM-клемме. Когда клемма IN1..IN4 является отрицательной клеммой источника питания 24 В, замкнутой на , петля замыкается, и соответствующий входной сигнал равен логической «1»; клемма IN1..IN4 разомкнута, и соответствующий входной сигнал равен логическому «0».
Это простая схема подключения концевых выключателей к USB-плате Mach4. Для питания этой части платы вам понадобится дополнительный блок питания. 24В не обязательно. Источника 12 вольт от блока питания ПК или адаптера переменного тока должно быть достаточно.
Проводка для входного сигнала
Клемма ввода сигнала часто подключается к бесконтактному выключателю, механическому концевому выключателю или фотоэлектрическому выключателю. На изображении показана разводка бесконтактного выключателя OMRON бесконтактный выключатель TL-Q5MC2 (TL-Q5MC2 DC 3-проводной, тип NPN, напряжение питания DC12-24V,коллектор открытый выход)
Фотоэлектрические выключатели часто используются в качестве концевых выключателей или переключатели origin/home фотоэлектрическим RG150-8 (светодиодный фотоэлектрический переключатель RG150-8, максимальный ток 50 мА, выход с открытым коллектором типа NPN.), например, проводка фотоэлектрического переключателя универсальной карты управления движением RNR: на изображении
Фотоэлектрические переключатели нормально разомкнуты, и когда оптический зазор перекрыт, фотоэлектрический переключатель выключен. Таким образом, клемма входного сигнала всегда имеет логическую «1» и становится логическим «0» при блокировке. Это противоречит типичной работе концевого выключателя. Для этой конфигурации мы должны настроить соответствующий входной терминал на [Активный низкий уровень через программное обеспечение Mach4]. Способ настройки: выберите меню [Config], выберите [Ports and Pins], а затем выберите страницу [Input Signals], как показано на рисунке.
Это противоречит типичной работе концевого выключателя. Для этой конфигурации мы должны настроить соответствующий входной терминал на [Активный низкий уровень через программное обеспечение Mach4]. Способ настройки: выберите меню [Config], выберите [Ports and Pins], а затем выберите страницу [Input Signals], как показано на рисунке.
Предполагается, что пользователь подключит фотоэлектрический переключатель к клемме IN1 в качестве концевого выключателя по оси X. На этом этапе вы должны проверить Active Low X++ и X-.
Кнопка аварийной остановки
Когда пользователь нажимает кнопку [Аварийный останов] во время обработки, процесс обработки будет немедленно прекращен. Это исключает аварии с первого раза. Из соображений безопасности мы настоятельно рекомендуем вам добавить клемму внешнего входа (IN1..IN4) к кнопке аварийного останова. Схема подключения кнопки аварийной остановки показана на рисунке.
Предположим, что пользователь подключил кнопку аварийной остановки к разъему IN1. Соответственно, нам нужно в программе Mach4 произвести настройку. Способ настройки: выберите [Config], выберите [Ports and Pins] и выберите страницу [Input Signals]. Потяните полосу прокрутки вниз, найдите строку с названием [Signal] [EStop], в строке линии Estop отметьте [Enable] и установите для параметра Port # значение 3. Установленный порт 3 означает, что сигнал обрабатывается Карта управления движением РНР. Другие номера портов указывают на то, что этот сигнал не относится к плате управления движением RNR. Установка номера контакта на «1» означает, что этот сигнал подключен к IN1 терминала карты управления движением RNR. После настройки
Соответственно, нам нужно в программе Mach4 произвести настройку. Способ настройки: выберите [Config], выберите [Ports and Pins] и выберите страницу [Input Signals]. Потяните полосу прокрутки вниз, найдите строку с названием [Signal] [EStop], в строке линии Estop отметьте [Enable] и установите для параметра Port # значение 3. Установленный порт 3 означает, что сигнал обрабатывается Карта управления движением РНР. Другие номера портов указывают на то, что этот сигнал не относится к плате управления движением RNR. Установка номера контакта на «1» означает, что этот сигнал подключен к IN1 терминала карты управления движением RNR. После настройки
завершить, нажмите ОК.
Попробуйте запустить какой-нибудь G-код и нажмите кнопку аварийной остановки на терминале IN1. Убедиться, что машина остановится.
Ограничение
При активации концевого выключателя процесс обработки немедленно прекращается. Это может эффективно предотвратить перемещение инструмента за пределы рабочей зоны и создать опасность. Это тот же эффект, что и нажатие кнопки аварийной остановки. Поэтому мы рекомендуем пользователям подключать концевые выключатели. Чтобы использовать только одну входную клемму, все переключатели могут быть подключены в конфигурации NO (нормально разомкнутая) к одной и той же входной клемме сигнала. Концевые выключатели подключаются, как показано на рисунке.
Это тот же эффект, что и нажатие кнопки аварийной остановки. Поэтому мы рекомендуем пользователям подключать концевые выключатели. Чтобы использовать только одну входную клемму, все переключатели могут быть подключены в конфигурации NO (нормально разомкнутая) к одной и той же входной клемме сигнала. Концевые выключатели подключаются, как показано на рисунке.
Здесь предполагается, что концевой выключатель подключен к клеммам IN1, тогда конфигурация следующая: Щелкните Config, выберите (Ports and Pins), а затем выберите (Input Signals). Потяните вниз полосу прокрутки и найдите имя [Сигнал] [X++ (положительный предел по оси X)], [X—(отрицательное положение по оси X)], [Y++ (положительное положение по оси Y)], [Y— (отрицательный предел по оси Y)], [Z ++ (положительный предел по оси Z)] и другие строки, включите [проверьте] {порт # (порт) установлен на 3], [номер контакта (номер контакта )] предоставляется «1». Как показано на изображении.
Обратите внимание, что если выбранный концевой выключатель является фотоэлектрическим переключателем, поскольку фотоэлектрический переключатель нормально разомкнут, ссылка также должна быть на содержание «проводки входных клемм», соответствующий [активный низкий (активный низкий)] проверен. Кроме того, при проводке выключатели не соединяются параллельно, а должны быть
Кроме того, при проводке выключатели не соединяются параллельно, а должны быть
соединены последовательно
Автоматический возврат в исходное положение или возврат в исходное положение
Карта управления движением RNR поддерживает функцию автоматического возврата в исходное положение каждой оси. Автоматический возврат к началу каждой оси состоит из четырех последовательных этапов.
Первый этап основан на заданном направлении, при этом G0 (ускоренный ход оси) оценивает процент, заданный параметром [Speed%] в Mach4, по направлению к исходной точке, пока не коснется переключателя исходной точки;
Второй этап: скорость G0 от переключателя исходного положения настроена на откат от упора;
Третий этап: скорость движения со скоростью 1/10 от первой стадии, постепенно к движущейся точке начала координат, до тех пор, пока сенсорный переключатель не остановится, коснувшись переключателя источника с очень медленной скоростью, чтобы обеспечить точность происхождения;
Четвертый этап: на том же этапе, что и второй этап, он остановится на скорости G0 после возврата на заданное расстояние. Это гарантирует, что ось полностью выйдет из исходного положения.
Это гарантирует, что ось полностью выйдет из исходного положения.
Как описано в разделе «Настройка концевых выключателей» в предыдущем разделе, чтобы использовать только одну входную клемму, выключатели исходного положения четырех осей могут быть подключены параллельно и совместно использовать одну клемму входного сигнала (IN1..IN4).
Программное обеспечение Mach4 должно быть сконфигурировано соответствующим образом для конфигурации параллельной нормально разомкнутой проводки. Предполагается, что исходный или домашний переключатель подключен к клемме IN2. Способ настройки: в меню [Config] выберите [Ports and Pins], а затем выберите страницу [Input Signals]. Потяните полосу прокрутки вниз, чтобы найти названия [Сигнал] [X Home (переключатель исходного положения по оси X)], [Y Home (переключатель исходного положения по оси Y)], [Z Home (переключатель исходного положения по оси Z)], [A Home (исходная точка оси A)], выберите [Enable], чтобы выбрать [Port #] как «3» и [Pin Number] как «2». Как показано на рисунке:
Как показано на рисунке:
Метод настройки скорости возврата в исходное положение
Выберите меню (Config), выберите (Homing / Limits) в [motor homing / Soft Limits)] (Motor Home / interface, найдите строку, где находится ось. Измените, изменив значение [Speed %]. Например, мы ожидаем выполнить возврат в исходное положение со скоростью 50% от скорости G0 (Быстрое перемещение оси), затем установите [Скорость %] на «50».При возврате в исходное положение направление движения оси связано с положением переключателя исходного положения. .Если переключатель исходной точки установлен на одном конце отрицательной оси вала, следует отметить пункт [Исходный отрицательный].Если переключатель исходной точки установлен на одном конце положительной оси вала, [Исходный отрицательный] должны быть пересечены, как показано на рисунке
Вторая и четвертая фазы процесса автоматического возврата в исходное положение представляют собой этап отсрочки после возвращения в исходное положение. Задайте метод отката расстояния: выберите меню (Config), выберите (Config Plugins).
Задайте метод отката расстояния: выберите меню (Config), выберите (Config Plugins).
Во всплывающем окне найдите строку [RnR Motion Control Card-ECO-V2.0] и нажмите [CONFIG], чтобы открыть диалоговое окно [Настройки параметров RNR Universal Motion Control Card].
В поле настройки «Возврат к нулю» измените расстояние возврата для каждой оси. Как показано на изображении, измените оси на «0,8». Таким образом, расстояние возврата составляет «0,8» единиц, когда вы возвращаетесь в исходную точку. Кроме того, установите флажок pull off, чтобы включить pull off. Настройка завершена, не забудьте нажать [Сохранить].
Автоматическое возвращение в исходное положение оси с ведомой осью
Ось и соответствующая ей ведомая ось должны быть оснащены переключателем исходного положения, а исходная ведомая ось и исходный переключатель переключателя соответствующей оси должны быть подключены к двум клеммам ввода сигнала. Здесь предполагается, что вспомогательная ось A-ось является осью X, на оси X установлен переключатель исходного положения, на валу установлен переключатель исходного положения. Когда ось X выполняет исходную операцию, на первом этапе и ось X, и ось A перемещаются к началу координат. Ось, которая первой коснется переключателя исходного положения, перестанет двигаться, а другая ось продолжит движение, пока не коснется переключателя исходного положения. Третий этап аналогичен первому этапу. Таким образом, две оси уравновешиваются, когда они автоматически возвращаются в исходное положение.
Когда ось X выполняет исходную операцию, на первом этапе и ось X, и ось A перемещаются к началу координат. Ось, которая первой коснется переключателя исходного положения, перестанет двигаться, а другая ось продолжит движение, пока не коснется переключателя исходного положения. Третий этап аналогичен первому этапу. Таким образом, две оси уравновешиваются, когда они автоматически возвращаются в исходное положение.
Автоматическая настройка инструмента
Карта управления движением RNR поддерживает функцию автоматической настройки инструмента. В Mach4 автоматическая настройка инструмента может использоваться для автоматического измерения и компенсации длины инструмента, позиционирования заготовки, нахождения центра заготовки и определения центральной точки заготовки. Чтобы использовать автоматическую настройку инструмента, универсальной плате контроллера движения RNR требуется входная клемма сигнала (IN1..IN4), которая должна быть подключена к наладчику инструмента. Этот установщик также называется сенсорной пластиной оси Z. Природа держателя инструмента представляет собой микропереключатель. Поэтому сделать сенсорную пластину своими руками очень просто. Два провода, соединительный инструмент или кромкомер, подключение к односторонней печатной плате или соединенной заготовке. Когда инструмент или искатель кромки касается печатной платы медного слоя или металлической заготовки, линия включается, и ввод сигнала настройки инструмента завершается.
Природа держателя инструмента представляет собой микропереключатель. Поэтому сделать сенсорную пластину своими руками очень просто. Два провода, соединительный инструмент или кромкомер, подключение к односторонней печатной плате или соединенной заготовке. Когда инструмент или искатель кромки касается печатной платы медного слоя или металлической заготовки, линия включается, и ввод сигнала настройки инструмента завершается.
Выберите входной сигнал на клемме входного сигнала IN1..IN4 сигнал в качестве сенсорной панели.
Предположим, что входной сигнал выбран в качестве инструмента ввода сигнала терминала IN1. Метод настройки в Mach4: выберите [Config], выберите [Ports and Pins], а затем выберите страницу [Input Signals]. Найдите строку, где [Signal] — [Probe], отметьте пункт [Enable], измените [Port #] на «3» и измените [Pin Number] на «1».
В Mach4 процесс настройки конкретного инструмента выполняется с помощью кода сценария VBScript. Код сценария VBScript требует, чтобы пользователь писал в соответствии с реальной ситуацией. Многие сценарии VB можно найти в Интернете. Вам нужно будет настроить код для вашего приложения.
Многие сценарии VB можно найти в Интернете. Вам нужно будет настроить код для вашего приложения.
Автоматическая очистка инструмента
Функция автоматической очистки инструмента помогает пользователю удалить длину инструмента и толщину заготовки, а Z определяет нулевую координату оси относительно обрабатываемой поверхности заготовки. Mach4 не обеспечивает автоматического обнуления кода скрипта. Нам нужно запрограммировать функцию автоматического обнуления инструмента. Шаги программирования: Выберите меню (Оператор) и выберите (Редактировать сценарий кнопки), а затем найдите экран (Выполнение программы), нажмите кнопку (Автоматическая установка нуля инструмента).
Как показано на рисунке, Mach4 откроет окно сценариев, как показано на рисунке
изображение.
Удалите исходный код скрипта в окне и замените его кодом, который будет работать для вашего приложения.
Интерфейс маховичка
Плата управления движением RNR предоставляет интерфейс штурвала для пользовательского штурвала. Обратите внимание, что интерфейс штурвала имеет выдерживаемое напряжение 5 В, поэтому подключайте только штурвалы с питанием от постоянного тока 5 В. Когда вход интерфейса штурвала превышает 5 В, это приведет к повреждению карты управления движением RNR.
Обратите внимание, что интерфейс штурвала имеет выдерживаемое напряжение 5 В, поэтому подключайте только штурвалы с питанием от постоянного тока 5 В. Когда вход интерфейса штурвала превышает 5 В, это приведет к повреждению карты управления движением RNR.
Ниже каждый вывод описывается следующим образом:
— 5 В положительное и 5 В отрицательное: доступен источник питания постоянного тока 5 В, который можно использовать для подачи питания на маховик
— Ось X, ось Y, ось Z, ось A: вал, соединенный с переключателем маховика, используется для выбора нужной оси
— A и B: подключение выходов энкодера A и B
— X10: скорость маховика 10-кратное увеличение
— X100: маховик Rate100x
Усовершенствованный интерфейс маховика совместим с маховиками системы Weihong.
Маховик WeiHong 15 штыревых контактов. Описание контактов маховика Weihong Подключение к интерфейсу маховика
1 VCC, L+ 5 В Положительный
2 А — А
3 Б — Б
4 Пусто
5 Пусто
6 Х1
7 Х10 — Х10
8 Х100 — Х100
9 4 оси — ось А
10 Пусто
11 Клемма COM, 0 В, L — 5 В, минус
12 Пустой
13 Ось Z — Ось Z
14 Ось Y — Ось Y
15 Ось X — Ось X
Настройка маховичка Mach4
При подключении маховика Mach4 должен быть настроен на активацию толчкового режима маховика. Метод настройки: Выберите меню [Set (Config)], выберите (Ports and Pins), выберите страницу (Encoder/MPG»s), установите флажок [MPG # 1} [Enable], как показано на рисунке.
Метод настройки: Выберите меню [Set (Config)], выберите (Ports and Pins), выберите страницу (Encoder/MPG»s), установите флажок [MPG # 1} [Enable], как показано на рисунке.
Нажмите [OK], чтобы сохранить настройку.
Нажмите [Tab] на клавиатуре, чтобы вызвать управление маховичком Mach4.
Нажмите кнопку [Режим толчковой подачи], чтобы переключить режим толчковой подачи на режим [MPG (Штурвал)], и нажмите [Alt A], чтобы переключить выбор оси X, как показано выше. Аккуратно поверните энкодер маховика, чтобы проверить, может ли он управлять движением по оси X.
Интерфейс штурвала как расширенный входной сигнал
Если вам не нужно подключать штурвал, вы можете использовать интерфейс штурвала в качестве дополнительных входных сигналов. Разъем маховика обеспечит еще 8 входных сигналов, а с предыдущими 4 сигнальными входами IN1..IN4 обеспечит в общей сложности 12 входных сигналов.
Интерфейс штурвала ввода сигнала соответствует следующим клеммам:
— Ось X: IN5
— Ось Y: IN6
— Ось Z: IN7
— Ось: IN8
— X10: IN9
— X100:IN10
— А:IN11
— Б: ИН12
Примечание: Входной терминал маховика IN5. .IN12 не поддерживает интерфейс, соответствующий предельному или исходному положению, настройке инструмента, только как обычный вход используемого переключателя (обычно используется в качестве панели управления подключением). подключение входного сигнала к оси X, например, нам нужен доступ оси X к внутреннему интерфейсу входного сигнала, принципиальная схема маховика следующим образом:
.IN12 не поддерживает интерфейс, соответствующий предельному или исходному положению, настройке инструмента, только как обычный вход используемого переключателя (обычно используется в качестве панели управления подключением). подключение входного сигнала к оси X, например, нам нужен доступ оси X к внутреннему интерфейсу входного сигнала, принципиальная схема маховика следующим образом:
Когда переключатель ввода сигнала замкнут и замкнут на землю, логический сигнал «1» подается на ось X. Мы выбираем меню Mach4 [Config] и выбираем [Ports and Pins], а затем выбираем страницу [Input Signals]. Перетащите полосу прокрутки, чтобы найти строку, где [Signal] — [Input #1], [Enable] выберите и измените [Port #] на «For «3», измените [Pin Number] на «5», чтобы Mach4 входной сигнал [Вход № 1] соответствует входу маховика X. Выберите
. Посмотрите на страницу диагностики Mach 3. Когда вы замкнете внешний переключатель оси X, вы увидите, что Input 1] Дисплей становится зеленым.
Выходные сигналы
Плата управления движением РНР имеет четыре изолированных оптопарных выхода. Выходной терминал использует Darlington ULN2003, способный управлять внешним реле или индикатором. Емкость привода составляет 60 мА. Подключение выходного сигнала к реле.
Выходной терминал использует Darlington ULN2003, способный управлять внешним реле или индикатором. Емкость привода составляет 60 мА. Подключение выходного сигнала к реле.
COM+ и COM- клеммной колодки выходного сигнала соответственно соединяют положительный и отрицательный полюсы источника питания 24 В постоянного тока. Выходные клеммы OUT1..OUT4 подключены к катушке реле через токоограничивающий резистор (другой конец катушки реле подключен к плюсовой клемме источника питания 24В). При этом сопротивление токоограничивающего резистора зависит от запрашиваемого реле.
Управление двигателем шпинделя
Mach4 поддерживает управление двигателем шпинделя. Mach4 предлагает три метода управления двигателем шпинделя.
Первый – это релейный режим. Mach4 выводит управляющие сигналы через две клеммы вывода сигналов.
Второй режим — ШИМ. В этом режиме Mach4 через сигнальный выход выводит ШИМ-сигнал с определенной выходной клеммой рабочего цикла, который создает управление скоростью (постоянного тока) двигателя шпинделя.
Третий метод — это импульсный метод, который в основном используется для управления серводвигателем. Плата управления движением RNR не поддерживает этот режим.
Управление шпинделем в релейном режиме
Режим реле, выходной разъем сигнала привода шпинделя с помощью двух реле включается или выключается для реверсирования двигателя шпинделя. Предположим, нам нужна клемма вывода сигнала OUT1 для управления реле вращения двигателя вперед и клемма вывода сигнала OUT2 для управления реле реверса двигателя. В Mach4 выберите меню [Config], выберите [Ports and Pins] и выберите [Spindle Setup] на всплывающей диалоговой странице. В поле (Управление реле) убедитесь, что (отключено реле шпинделя) не отмечено; in [Вывод по часовой стрелке # (Вывод по часовой стрелке)] Заполните «1»; против часовой стрелки в [ Output # (CCW Output) и введите «2».
Нажмите кнопку [OK], чтобы сохранить настройки. Пользователь может подключить индикатор OUT1 и OUT2 (см. предыдущий раздел) для отладки. При выполнении программы «M3» будет виден выходной сигнал OUT1; при выполнении программы «M4» будет виден выходной сигнал OUT2; при выполнении программы «M5» OUT1 и OUT2 выключаются. Используйте страницу MDI для ввода кодов M3, M4 и M5.
При выполнении программы «M3» будет виден выходной сигнал OUT1; при выполнении программы «M4» будет виден выходной сигнал OUT2; при выполнении программы «M5» OUT1 и OUT2 выключаются. Используйте страницу MDI для ввода кодов M3, M4 и M5.
Режим ШИМ
Предположим, нам нужно вывести сигнал PWM (широтно-импульсная модуляция) на клемму OUT3, чтобы управлять реле питания двигателя шпинделя, регулировка скорости двигателя достигается. В Mach4: выберите [Config], выберите [Ports and Pins] и выберите страницу [Spindle Setup] во всплывающем диалоговом окне. В поле «Управление двигателем» установите флажок «Использовать выход двигателя шпинделя» и выберите «ШИМ-управление».
Если установлен флажок [Использовать выход двигателя шпинделя], Mach4 автоматически активирует выходной контакт двигателя шпинделя. Нажмите «ОК», когда появится всплывающее окно с сообщением «Двигатель шпинделя теперь включен. Убедитесь, что вы установили его выводы.
Затем выберите вкладку «Выходы двигателя». ], измените [Step Port] на «3», измените [Step Pin#] на «3» и укажите OUT3 как выходной разъем ШИМ.
Нажмите кнопку [OK] для сохранения. Подключите индикатор (см. предыдущий раздел) к OUT3 для отладки. Когда выполняется программа «M3», можно увидеть выходной сигнал OUT3
], измените [Step Port] на «3», измените [Step Pin#] на «3» и укажите OUT3 как выходной разъем ШИМ.
Нажмите кнопку [OK] для сохранения. Подключите индикатор (см. предыдущий раздел) к OUT3 для отладки. Когда выполняется программа «M3», можно увидеть выходной сигнал OUT3
На странице Mach4 [Program Run] нажмите на зеленую полосу [Spindle Speed] в [и измените значение [SRO%] на меньшее [100%].
В этом случае можно наблюдать, как внешний индикатор OUT3 начинает мигать на странице диагностики (выходной сигнал ШИМ).
Вывод других сигналов
Сигнальный терминал может быть назначен выходным контактам OUT1..OUT4 в Mach4 из скрипта и им можно манипулировать в Mach4. Например, нам нужно назначить OUT4 на [OUTPUT#1] Mach4. Метод настройки: выберите [Config], выберите [Ports and Pins] и выберите страницу [во всплывающем диалоговом окне Output Signals]. Найдите строку, где [Signal] — [Output #1], отметьте [Enable], измените [Port #] на «3» и измените [Pin Number] на «4».
