Как работает микросхема TDA1085C для управления коллекторным двигателем. Каковы основные функции и особенности этой микросхемы. Как правильно подключить и настроить TDA1085C в схеме управления двигателем. Какие преимущества дает использование TDA1085C по сравнению с другими решениями.
Основные характеристики и функции микросхемы TDA1085C
Микросхема TDA1085C представляет собой специализированный контроллер для управления коллекторными двигателями переменного тока. Она обладает следующими ключевыми особенностями:
- Встроенный преобразователь частоты в напряжение для обработки сигнала от тахогенератора
- Генератор плавного разгона с программируемой интенсивностью
- Ограничение пускового и рабочего тока двигателя
- Прямое управление симистором для регулирования скорости
- Возможность питания непосредственно от сети переменного тока
- Защита от обрыва цепи тахогенератора
Благодаря этим функциям TDA1085C позволяет реализовать эффективное управление скоростью коллекторного двигателя с обратной связью по частоте вращения.
Принцип работы основных блоков TDA1085C
Рассмотрим подробнее, как функционируют ключевые узлы микросхемы:
Преобразователь частоты в напряжение
Этот блок преобразует частоту импульсов от тахогенератора в постоянное напряжение, пропорциональное скорости вращения двигателя. Он подключается к выводам 11 и 12 микросхемы. Частота входных импульсов преобразуется в ток, заряжающий внешний конденсатор. Напряжение на конденсаторе пропорционально частоте вращения.
Генератор плавного разгона
Обеспечивает плавное нарастание скорости при пуске и изменении заданной скорости. Время разгона задается внешней RC-цепочкой на выводе 7. Возможно программирование двух скоростей разгона — быстрой и медленной.
Ограничитель тока
Защищает двигатель и симистор от перегрузки по току. Работает по принципу обратной связи — при превышении заданного тока уменьшает угол открытия симистора, снижая напряжение на двигателе.
Особенности подключения TDA1085C в схеме управления двигателем
При разработке схемы управления на основе TDA1085C следует учитывать несколько важных моментов:

- Необходимо правильно выбрать номиналы внешних компонентов, задающих режимы работы микросхемы
- Требуется тщательная разводка печатной платы для минимизации помех
- Рекомендуется использовать RC-фильтр в цепи тахогенератора
- Симистор должен быть защищен от перенапряжений снабберной цепью
Соблюдение этих правил позволит реализовать стабильное управление во всем диапазоне скоростей двигателя.
Преимущества использования TDA1085C по сравнению с другими решениями
Применение микросхемы TDA1085C для управления коллекторным двигателем дает ряд существенных преимуществ:
- Высокая интеграция — большинство необходимых функций реализовано внутри микросхемы
- Простота настройки за счет минимума внешних компонентов
- Встроенные защитные функции повышают надежность системы
- Возможность точного управления скоростью во всем диапазоне
- Плавный разгон снижает нагрузку на механику привода
Это делает TDA1085C оптимальным выбором для построения недорогих и надежных систем управления коллекторными двигателями.
Типовая схема включения TDA1085C
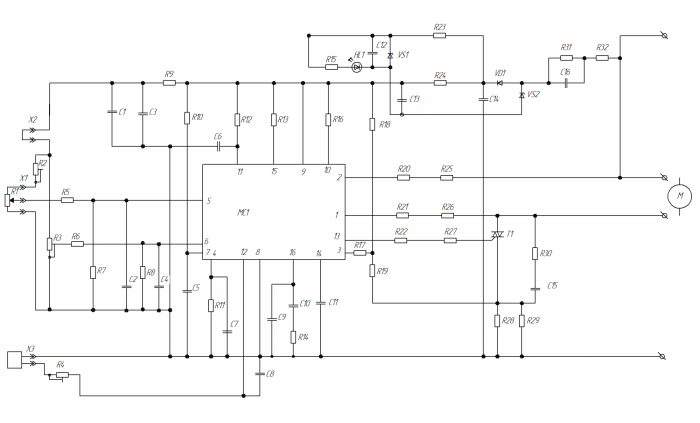
Рассмотрим пример типовой схемы управления двигателем на основе TDA1085C:
«` «`На схеме показаны основные элементы системы управления:
- Микросхема TDA1085C в центре
- Коллекторный двигатель справа
- Симистор для регулирования напряжения на двигателе
- Тахогенератор для обратной связи по скорости
- Внешние компоненты (резисторы, конденсаторы) для настройки режимов работы
Такая схема позволяет реализовать точное управление скоростью двигателя с защитой от перегрузок и плавным разгоном.
Настройка и оптимизация схемы на TDA1085C
Для достижения оптимальной работы схемы управления двигателем на TDA1085C требуется правильная настройка. Рассмотрим основные этапы:
- Выбор номиналов внешних компонентов согласно рекомендациям в документации
- Настройка цепи ограничения тока под конкретный двигатель
- Оптимизация параметров разгона для плавного старта
- Подбор фильтра в цепи тахогенератора для устранения помех
- Настройка контура регулирования скорости для обеспечения устойчивости
Правильная настройка позволит добиться стабильной работы двигателя во всех режимах.
Применение TDA1085C в бытовой технике
Микросхема TDA1085C нашла широкое применение в различных бытовых приборах с регулируемым электроприводом:
- Стиральные машины — для управления двигателем барабана
- Кухонные комбайны — регулировка скорости вращения насадок
- Пылесосы — плавное изменение мощности всасывания
- Электроинструменты — точная настройка оборотов
Использование TDA1085C позволяет создавать недорогие и надежные системы управления двигателями в бытовой технике.
Заключение: перспективы применения TDA1085C
- Простота применения
- Низкая стоимость
- Надежность за счет встроенных защит
- Хорошие характеристики управления
Это делает TDA1085C оптимальным выбором для массовых применений в бытовой технике и инструменте. В перспективе эта микросхема еще долго будет находить применение в недорогих моделях устройств с регулируемым электроприводом.

TDA1085 — Регулятор оборотов коллекторного двигателя — DataSheet
Микросхема TDA1085 фирмы MOTOROLA (отечественный аналог — КС1027ХА4) представляет собой контроллер коллекторного электродвигателя (ЭД) переменного тока. Она включает в себя все необходимые управляющие узлы и элементы, обеспечивающие функционирование ЭД в различных режимах его работы (например, в режимах разгона и стабилизации выбранной скорости вращения).
Особенности
- Внутренний преобразователь частоты в напряжение
- Встроенный генератор разгона
- Плавный пуск
- Ограничение тока нагрузки
- Цепь датчика тахогенератора
- Прямое питание от источника переменного тока
- Функция безопасного подключения двигателя
|
Исполнение в пластиковом корпусе CASE 648 |
С буквой D в маркировке. Пластиковый корпус CASE 751B (SO–16) |
Готовый регулятор оборотов или все для его сборки вы можете заказать в нашем интернет-магазине
|
Блок — схема и назначение выводов |
|
| 1 | Синхронизация тока |
| 2 | Синхронизация напряжения |
| 3 | Ограничение тока двигателя |
| 4 | Текущая скорость |
| 5 | Установка скорости |
| 6 | Управление током генератора пилообразного сигнала |
| 7 | Время генератора разгона |
| 8 | Общий провод |
| 9 | Плюс питания |
| 10 | Подключение параллельного стабилизатора и балластного резистора |
| 11 | Накапливающий конденсатор |
| 12 | Цифровой датчик скорости |
| 13 | Выход генератора запускающих импульсов |
| 14 | Конденсатор пилообразного напряжения |
| 15 | Установка пилообразного тока |
| 16 | Замкнутый контур стабилизации |
| Параметр | Обозначение | Значение | Ед. изм. | |
| Питающее напряжение на выводе 9 | VCC | 15 | В | |
| Максимальное напряжение на следующих выводах | Вывод 3 | VPin | +5 | В |
| Выводы –5–6–7–13–14–16 | от 0 до VCC | |||
| Вывод 10 | от 0 до +17 | |||
| Максимальный ток на следующих выводах | Выводы 1 и 2 | IPin | от -3 до +3 | мА |
| Вывод 3 | 0т -1 до 0 | |||
| Вывод 9 (VCC) | 15 | |||
| Вывод 10 параллельный стабилизатор | 35 | |||
| Вывод 12 | от -1 до +1 | |||
| Вывод 13 | -200 | |||
| Максимальная рассеиваемая мощность | PD | 1 | Вт | |
| Тепловое сопротивления, кристалл-воздух | RΘJA | 65 | ºC/Вт | |
| Диапазон рабочих температур кристалла | TJ | от – 10 до + 120 | ºC | |
| Температура хранения | Tstg | от – 55 до + 150 | ºC | |
| Параметр | Обозначение | Мин. | Тип. | Макс. | Ед. изм. |
| Стабилизатор напряжения | |||||
| Внутренне регулируемое напряжение стабилизации (Vpin 9) (Ipin 7 = 0, Ipin 9 + IPin 10 = 15 mA, Ipin 13 = 0) | VCC | 15 | 15,3 | 15,6 | В |
| Температурный коэффициент напряжения стабилизации | TF | — | — 100 | — | ppm/°C (одна миллионная доля вольта на градус Цельсия) |
| Потребляемый ток (Ipin 9) (V9 = 15 В, V12 = V8 = 0, I1 = I2 = 100 мкА, все другие выводы не подключены) | ICC | 4,5 | 6,0 | мА | |
| Контроль напряжения стабилизации уровень включения | VCC EN | — | VCC — 0.4 | — | В |
| Контроль напряжения стабилизации уровень выключения | VCC DIS | — | VCC — 1.0 | — | |
| Генератор разгона | |||||
| Диапазон напряжений на входе для задаваемой скорости | VPin 5 | 0,08 | — | 13,5 | В |
| Опорный ток смещения на входе | -IPin 5 | 0 | 0,8 | 1,0 | мкА |
| Опорный ток смещения при выборе разгона | -IPin 6 | 0 | — | 1,0 | мкА |
| Начальный уровень при задании разгона | VDS | 0 | — | 2,0 | В |
| Конечный уровень при задании разгона VPin6 = 0.75 В | VDF/VDS | 2,0 | 2,09 | 2,2 | |
| Зарядный ток при быстром разгоне VPin 7 = 0 В | -IPin 7 | 1.0 | — | 1.7 | мА |
| Зарядный ток при быстром разгоне VPin 7 = 10 В | 1.0 | 1,2 | 1.4 | ||
| Зарядный ток при задании разгона VPin7= 2.0 В | -IPin 7 | 4,0 | 5,0 | 6,0 | мА |
| Ограничитель тока | |||||
| Ограничение тока усилителя — IPin 7/IPin 3 (IPin 3 = — 300 мкА) | Cg | 130 | 180 | 250 | |
| Отслеживание порогового напряжения IPin 3 = -10 мкА | VPin 3 TH | 50 | 65 | 80 | мВ |
| Преобразователь частоты в напряжение | |||||
| Входной сигнал «Низкий уровень напряжения» | V12 L | -100 | — | — | мВ |
| Входной сигнал «Высокий уровень напряжения» | V12 H | +100 | — | — | |
| Напряжение сброса | V12 R | 5.0 | — | — | В |
| Отрицательное напряжение срабатывания IPin 12 = — 200 мкА | -V12 CL | — | 0,6 | — | В |
| Ток смещения на входе | -IPin 12 | — | 25 | — | мкА |
| Внутренний коэффициент усиления тока G = IPin 4/IPin 5 , VPin 4 = VPin 5 = 0 | G.O | 9,5 | 11 | ||
| Линейность усиления в зависимости от напряжения на выводе 4 (G8.6 = Усилению при VPin 4 = 8.6 В) | G.-G8.6 | ||||
| При V4=0 В | 1.04 | 1.05 | 1.06 | ||
| При V4 = 4.3 В | 1.015 | 1.025 | 1.035 | ||
| При V4 = 12 В | 0.965 | 0.975 | 0.985 | ||
| Температурный коэффициент усиления (VPin 4 = 0) | TF | — | 350 | — | ppm/°C |
| Ток поверхностной утечки на выходе (IPin 11 = 0) | -IPin 4 | 0 | — | 100 | нА |
| Усилитель управления | |||||
| Диапазон напряжений на входе для текущей скорости | VPin4 | 0 | — | 13,5 | В |
| Напряжение смещения на входе VPin 5 — VPin 4 (IPin16=0, VPin16 = 3.0 и 8.0 В) | Voff | 0 | — | 50 | мВ |
| Крутизна усиления (IPin 16/Δ (V5-V4)) (IPin 16 = ± 50 мкА, VPin 16 = 3.0 В) | T | 270 | 340 | 400 | мкА/В |
| Возможное отклонение выходного тока источника | IPin 16 | -200 | -100 | -50 | мкА |
| Возможное отклонение выходного тока стока | 50 | 100 | 200 | ||
| Напряжение насыщения на выходе | V16 sat | — | — | 0,8 | В |
| Генератор импульсов | |||||
| Уровни токов синхронизирующих импульсов в линии напряжения | IPin 2 | — | ±50 | ±100 | мкА |
| Уровни токов синхронизирующих импульсов в линии тиристора | IPin 1 | — | ±50 | ±100 | |
| Задержка запускающего импульса (CPin 14 = 47 нФ, RPin 15 = 270 кОм | TP | — | 55 | — | мкс |
| Период повторения запускающих импульсов | TR | — | 220 | — | мкс |
| Импульсный ток на выходе VPin 13 = VCC — 4.0 В | -IPin 13 | 180 | 192 | — | мА |
| Ток поверхностной утечки на выходе VPin 13 = — 3.0 В | I13 L | — | — | 30 | мкА |
| Напряжение на входе при полном угле проводимости | V14 | — | 11,7 | — | В |
| Высокий уровень пилоообразного напряжения | V14 H | 12 | — | 12,7 | D |
| Ток разряда пилообразного напряжения, IPin 15 = 100 мкА | IPin 14 | 95 | — | 105 | мкА |
|
Принципиальная схема включения TDA1085 |
||
| Предельный ток 10 А настраивается экспериментально, подбором резистора R4 |
Диапазон скоростей вращения двигателя: от 0 до 15000 об/мин |
|
| Максимальный разгон: до 3200 об/мин за 1 секунду | ||
| Нормальный разгон: за 10 с от 850 до 1300 об/мин | 8 полюсной тахогенератор должен выдавать максимальное напряжение 30 В при 6000 об/мин, в разомкнутой цепи | |
| Скорость вращения, об/мин | Напряжение на выводе 5 | Конвертер частоты вращения в напряжение: 8 мВ на 1 об/мин (12 в при максимальной частоте вращения, CPin 11 = 680 пФ, VCC = 15.3 В |
| 800 | 609 мВ | Симистор на 15 А, 600 В, минимальный ток на управляющем электроде 90 мА |
| 1300 | 966 мВ | |
| 7500 | 5,912 В | |
| 15000 | 12 В | |
Общее описание
Микросхема TDA 1085C управляет симистором в соответствии с задаваемой скоростью. Скорость вращения двигателя отслеживается тахогенератором в цифровом формате (считаются импульсы от тахогенератора), а затем преобразуется в аналоговое напряжение. Скорость устанавливается, внешне фиксированной, и подается на вход внутреннего линейного регулятора после того, как будут заданы программируемые линейные ускорения. Общий результат состоит в поддержании полного диапазона скоростей с двумя линейными ускорениями, которые позволяют эффективно управлять стиральной машиной. Кроме того, TDA 1085C защищает всю систему от переменного тока питающей сети, при остановке или колебаниях, и от перегрузки по току в двигателе или при неисправности таходатчика.
Функции входов и выходов ( для рисунков 1 и 8)
Регулятор напряжения (стабилизатор) – (Контакты 9 и 10). Это регулятор параллельного типа способный поглощать большие токи и давать хорошие характеристики. Питание подается от сети переменного тока через внешние гасящие резисторы R1, R2, (резисторы 6.8 кОм и 270 Ом) и выпрямитель. Полуволна тока после диода 1N4007 подается на сглаживающий фильтр, состоящий из двух конденсаторов, емкостью 100 мкФ и резистора 270 Ом, напряжение на котором контролируется микросхемой. Когда питание (Vcc) превысит 15 В, ток проходит по другому гасящему резистору R10 на вывод 10. Эти три резисторы должны быть подобраны таким образом, чтобы удовлетворять следующим условиям:
- Выдавать ток 10 мА через вывод 10, когда напряжение питания переменного тока минимально и потребление напряжения постоянного тока (Vcc) максимально (при быстром разгоне двигателя и присутствии импульсов)
- Поддерживать напряжение 3 В на выводе 10, когда в линия питания переменного тока выдает максимальный ток, а потребление напряжения постоянного тока минимальное (нет разгона и пульсаций).
- Задержку пускового импульса, пока ток проходит через ноль, при широких границах пуска и индуктивных нагрузках.
Отказ по питанию в цепи переменного тока приведет к отключению. Двойной емкостный фильтр, состоящий из резисторов R1 и R2, хорошо сглаживает пульсации и устраняет шумы при разгоне двигателя.
Контроль частоты вращения (выводы 4, 11, 12). Микросхема может работать с внешним аналоговым датчиком скорости вращения: его выход должен быть подключен выводу 4, а выводы 12 и 8 должны быть соединены между собой.
В большинстве случаев более удобно использовать цифровой датчик скорости вращения двигателя с одним недорогим тахогенератором, который не нуждается в настройке. За каждый положительный цикл на выводе 12, конденсатор, подключенный к выводу 11, заряжается почти до напряжения Vcc . В это же время, на вывод 4 подается ток в 10 раз превышающий, зарядный ток конденсатора C11. Ток источника называется G и жестко задан, но тем не менее, требует регулировки подстроечным сопротивлением 50 кОм, подключенном к выводу 4. Ток через этот резистор пропорционален емкости на выводе 11 и скорости вращения двигателя; напряжение на выводе 4 фильтруется от помех с помощью конденсатора и представляет “истинную фактическую скорость вращения двигателя”.
Чтобы сохранить линейность на высоких оборотах, важно убедиться, что емкость, подключенная к выводу 11 полностью заряжается: внутреннее сопротивление источника, подключенного к выводу 11, имеет импеданс 100 кОм. Тем не менее емкость на выводе 11, должна быть максимально высокой, так как она имеет большое влияние на температурный коэффициент. Резистор 470 кОм между выводами 11 и 9 уменьшает ток утечки и влияние температурного коэффициента.
Через вывод 12 осуществляется функция контроля: когда напряжение на нем превышает 5 В, запускающие импульсы тормозятся и микросхема сбрасывается. Так же через него отслеживается целостность цепи тахогенератора, и в случае ее нарушения, запускающие импульсы тормозятся, что защищает двигатель от ухода из-под контроля. Внутри TDA1085C к выводу 12 подключен демпферный диод, что дает возможность сделать схему более компактной.
Генератор пусковых импульсов — (Выводы 1, 2, 5, 13, 14, 15)
Эта цепь выполняет четыре функции:
- Преобразование уровня выходного сигнала с усилителя постоянного тока в пропорциональный угол регулирования.
- Калибровку длительности импульса.
- Повторение импульса, если симистор не переключился или нет тока через щетки двигателя (обрыв цепи питания).
- Задержку запускающих импульсов, пока ток не пройдет через ноль при широком угле регулирования и индуктивных нагрузках.
Сопротивление на выводе 15 задает разрядный ток конденсатора на выводе 14. Пилообразный сигнал определяется R15 и С14(обычно 47 нФ). Длительность управляющего импульса и период повторения находятся в обратно пропорциональной зависимости от крутизны наклона пилообразного напряжения.
Генератор пилообразного напряжения – (выводы 5, 6, 7). Истинные значения скорости устанавливаются в соответствии со значениями на выходе генератора пилообразного сигнала (вывод 7). В соответствии с заданным значением скорости ( напряжение на выводе 5), генератор пилообразного напряжения заряжает внешний конденсатор C7 до момента, когда напряжение на выводе 5 (заданная скорость) сравняется с напряжением на выводе 4 (действительная скорость), смотрите рисунок 2. Микросхема имеет внутренний источник зарядного тока в 1.2 мА, который выдает от 0 до 12 В на выводе 7. Он дает быстрый разгон двигателя (обычно за 5.0 с), что позволяет быстро изменять скорость без чрезмерной нагрузки на механические части привода. В TDA 1085C есть возможность снизить этот высокое ускорение с введением низкого разгона. Это достигается путем уменьшения тока через вывод 7 до 5.0 мА, оставаясь под полным управлением напряжением на выводе 6. Это возможно при соблюдении следующих условий:
- Наличие быстрого разгона VPin 5 > VPin 4
- Происходит разделение в диапазоне напряжений на выводе 4 (действительная скорость двигателя) определяется VPin 6 ≤ VPin 4 ≤ 2.0 VPin 6
Для двух фиксированных значений VPin 5 и VPin 6, скорость мотора будет иметь большой разгон. Если сброс произойдет (независимо от причин), указанных выше последующий разгон будет полностью перерабатываться от 0 до максимальной скорости. Если напряжение на выводе 6 равно 0, возникает только высокий темп разгона.
Чтобы установить действительную нулевую скорость надо ,чтобы напряжение на выводе 5 (от 0 до 80 мВ) интерпретировалось как истинный ноль. Как следствие, при изменении устанавливаемой скорости, проектировщик должен быть уверен, что любой переходный процесс не будет проходить через ноль (напряжение на выводе 5 не будет ниже 80 мВ) иначе вся схема будет перезапущена.
Как и напряжения, подаваемые на контакты 5 и 6, являются производными от внутреннего стабилизатора напряжения, так и напряжение на выводе 4 тоже происходит от того же источника питания, скорость мотора (которая определяется соотношением между вышеуказанными напряжениями) является полностью независимой от колебаний напряжения питания Vcc и температурного фактора.
Усилитель управления – (пин 16) он усиливает разницу между истинным значением скорость (вывод 4) и заданной скорости (контакт 5), посредством генератора пилообразного сигнала (генератора разгона). Его сигнал на выходе (вывод 16) имеет двойную чувствительность с максимальным возможностям ± 100 мА и заданной крутизной (340 мА/В это типовое значение). Вывод 16 напрямую управляет генератором пусковых импульсов, и должен быть нагружен на электрическую сеть, которая компенсирует механические характеристики двигателя и его нагрузку, для того, чтобы обеспечить стабильность в любом состоянии и кратчайшую переходную характеристику см. Рис.4.
Эта сеть должна быть подобрана экспериментально.
В случае периодического изменения крутящего момента, вывод 16 непосредственно обеспечивает угол сдвига фаз колебаний.
Вывод 13 является импульсным выходом, и внешний ограничивающий резистор на нем обязателен.
Ограничитель тока – (вывод 3). Безопасная работа двигателя и симистора при все условиях обеспечивается за счет ограничения пикового тока. Ток двигателя дает переменное напряжение на шунтирующем резисторе (0,05 Вт рис. 4). Отрицательные полуволны передаются на вывод 3, который имеет положительный потенциал, определяемый резисторами R3 и R4. Когда возрастает ток двигателя, динамический диапазон напряжения на выводе 3 тоже увеличивается. Когда вывод 3 становится немного отрицательным относительно вывода 8 , ток начинает проходить по нему. Этот ток, как правило, усиливают в 180 раз, затем используется для разрядки конденсатора на выводе 7 . Как следствие, уменьшается угол регулирования до значения, где будет достигнуто равновесие. Выбор резисторов R3, R4 и шунта определяет величина тока разряда конденсатора на выводе 7.
Обратите внимание, что ограничитель тока действует только на пике тока симистора.
Разводка печатной платыВнутренняя схемаПрименение
Правила компоновки печатной платы.
В большинстве схем, где используется TDA1085C, на одной печатной плате рядом с большими токами и напряжениями могут присутствовать сигналы низкого напряжения значением в несколько милливольт.
Самое главное разделить их друг от друга, для этого следует соблюдать следующие правила:
- Выводы развязывающего конденсатора, которые также являются входами одинаковых компараторов, должны располагаться, как можно ближе к микросхеме и друг к другу, и заземлены в одной точке.
- Заземление от тахогенератора должно быть подключено непосредственно к контакту 8, при этом должен заземляться только тахогенератор. По сути, последнее является основной причиной возникновения шума из-за своей близости к двигателю, который индуцирует высокие значение dφ/dt.
- Схема заземления должна быть типа «звезда», чтобы полностью устранить силовые токи, протекающие в цепи заземления, передающиеся через развязывающие конденсаторы на чувствительные выводы: 4, 5, 7, 11, 12, 14, 16.
В качестве примера на рисунке 5 представлена плата, на которой показано подключение группы чувствительных к помехам выводов и связанных с ними конденсаторов в соответствии с вышеперечисленными правилами. Обратите внимание на полное разделение низковольтной сигнальной части и мощной высоковольтной части. Их раздел идет вдоль линии AB.
Соблюдение этих правил дает возможность регулировки во всем диапазоне скоростей.
Источник питания
Поскольку рассеивающий резистор рассеивает заметную мощность, необходимо по возможности снизить потребление тока до минимума. При изношенном щеточном узле схема может подавать запускающие импульсы несколько раз, что вызывает увеличение потребляемого тока. При выборе гасящего резистора нужно это учитывать. Кроме того параллельный стабилизатор должен всегда находиться в следующем динамическом диапазоне: ток через вывод 10 должен быть выше 1 мА, а напряжение выше 3 В при самой плохой конфигурации. Двойной фильтр на выходе обязателен.
Цепь тахогенератора
Напряжение сигнала от тахогенератора должно быть пропорционально скорости вращения двигателя. Для устойчивой работы к выходу тахогенератора необходимо подключить RC-фильтр. Выполнение этих факторов, дает сигнал постоянной амплитуды на выводе 12 на всем диапазоне скоростей вращения двигателя. Рекомендуется проверить, чтобы эта максимальная амплитуда находилась в пределах 1,0 В, чтобы иметь самое большое отношение сигнал/шум без перезапуска микросхемы (что может произойти, если напряжение на выводе 12 достигнет 5,5 В). Необходимо также проверить, чтобы сигнал на выводе 12 находился в балансе между «высоким значением» (более 300 мВ) и «низким». 8-полюсный тахогенератор — это минимум для стабильности на низких оборотах, а 16-полюсник еще лучше.
RC фильтр в цепи тахогенератора должен быть настроен на 30 Гц, чтобы быть как можно дальше от 150 Гц, что соответствует третьей гармонике сети переменного тока, генерируемой двигателем во время запуска. Кроме того, подключенный к выводу 12, высокоомный резистор, дает положительное смещение на этом выводе, устраняя шум, который может интерпретироваться как сигнал от тахогенератора. Это смещение должно быть спроектировано таким образом, чтобы на выводе 12 было не менее 200 мВ (отрицательное напряжение) при самой низкой скорости вращения двигателя.
Преобразователь частоты в напряжение
Емкость на выводе 11 имеет рекомендованное значение 820 пФ для 8-полюсных тахогенераторов с максимальной скоростью вращения двигателя 15000 об/мин, а сопротивление на выводе 11 всегда должно быть 470 кОм.
Сопротивление подключенное к выводу 4 должно выбираться так, чтобы давать 12 В при максимальной скорости вращения двигателя, чтобы максимизировать отношение сигнал / шум. Поскольку отношение FV / C, а также значение CPin 11 разделены, RPin 4 должно быть регулируемым. Оно должно состоять из постоянного резистора и подстроечного, составляющего 25% от их общего сопротивления. Регулировка при этом станет проще.
После регулировки, например, при максимальной скорости вращения двигателя, FV / C имеет остаточную нелинейность; коэффициент преобразования (мВ на один об / мин) увеличивается на 7,7% по мере того, как скорость приближается к нулю. Гарантированный разброс последнего очень узкий, максимальная ошибка при этом составит 1% от скорости вращения.
Следующие формулы определяют напряжение на выводе 4 (VPin4) в вольтах:
VPin 4 = G.0 ∙ (VCC–Va) ∙ CPin 11 ∙ R4 ∙ f ∙ 1/(1+120k/RPin 11)
G.0 ∙ (VCC – Va) ≈ 140
Va = 2.0 VBE
120 k = Rint, (входное сопротивление на выводе 11)
Установка скорости вращения — (контакт 5) При проектировании подбирают цепь внешних резисторов, которые задают серию различных напряжений, соответствующих различным скоростям вращения двигателя. При переключении внешних резисторов необходимо убедиться убедитесь, что на контакт 5 не подается напряжение ниже 80 мВ. Если такое случиться, произойдет полная перезагрузка схемы.
Генератор разгона — (Pin 6) Если требуется только высокий темп разгона, соедините вывод 6 с землей.
При задании разгона, устанавливается напряжение на выводе 6, соответствующее точке разгона двигателя. Задание (или медленный разгон) будет продолжаться до момента, когда скорость двигателя достигнет удвоенного начального значения.
Соотношение двух напряжений может быть изменено вниз (рисунок 6) или вверх (рисунок 7).
Задаваемый разгон может быть уменьшен внешним резистором от VCC, заряжающим емкость на выводе7, добавляя его ток к току внутреннего генератор 5.0 мА.
Силовые цепи
Переключающий импульс симистора должен определяться резистором на выводе 13 в соответствии с потребностями в квадранте IV.Длительность запускающего импульса может быть нарушена шумовыми сигналами, генерируемыми самим симистором, которые интерферируют в пределах контактов 14 и 16, именно те, которые его определяют. Легко заметный, этот эффект безвреден.
Симистор должен быть защищен от скачков напряжения во внешней цепи питания цепочкой 100 нФ х 100 Ом.
Шунтирующий резистор должен быть как можно более неиндуктивным. Его можно изготовить, используя константановую проволоку.
Когда нагрузка представляет собой универсальный двигатель постоянного тока, подключенный через выпрямительный мост, симистор должен быть защищен от скачков напряжений при коммутации, катушкой 1,0-2,0 мГн, подключенной последовательно с выводом симистора MT2.
Функции синхронизации выполняются резисторами, определяющими напряжение в линии переменного тока и проводимость симистора. Значение 820 кОм является нормальным, но может быть уменьшено до 330 кОм для того, чтобы обнаруживать «нули» и уменьшить остаточную составляющую в линии постоянного тока ниже 20 мА.
Ограничение тока
Ограничитель тока начинает разряжать конденсатор 7 (опорная скорость), когда ток двигателя достигает заданного порогового уровня. Коэффициент усиления контура определяется резистором, соединяющим вывод 3 с последовательным шунтом. Опыт показал, что оптимальное значение для ограничения среднеквадратичного тока 10 A находится в пределах 2,0 кВт. Вывод 3 имеет чувствительность по току, которая ограничена разумными значениями и не должна реагировать на пиковые значения.
Если не используется, контакт 3 должен быть подключен к максимальному положительному напряжению 5,0 В вместо того, чтобы оставаться свободным.
Стабильность контура
Цепочка на выводе 16 является преобладающей и должна быть скорректирована экспериментально во время разработки модуля. Значения, указанные на рисунке 4, типичны для стиральных машин, но допускают большие изменения от одной модели к другой. R16 (единственное ограничение) не должен опускаться ниже 33 кОм, в противном случае ограничение скорости нарастания вызовет большие переходные ошибки при нагрузках.
Если вы нашли ошибку, пожалуйста, выделите фрагмент текста и нажмите Ctrl+Enter.
Приложение к статье: Важнейший станок «деревянного» моделиста. Схема базируется на рекомендациях фирмы Motorola, указанных в документации на микросхему TDA1085C (см. здесь, российский аналог КС1027ХА4) Эта ИС является контроллером фазового угла управления триаком (симистором), имеющим все необходимые функции для управления скоростью универсального (коллекторного) двигателя переменного тока, например, в стиральных машинах. В состав контроллера входят: внутренний регулятор напряжения для стабилизации питания ИС, встроенный преобразователь частоты в напряжение (детектор скорости), задатчик интенсивности с программируемым генератором темпа разгона, обеспечивающий плавный пуск, ограничитель тока, управляющий усилитель для стабилизации скорости двигателя и генератор импульсов управления триаком. Дополнительно в схеме осуществляется мониторинг напряжения питания Vcc , напряжения задания скорости и импеданса цепи импульсного датчика скорости.
Обычно контроллер работает в конфигурации с замкнутой обратной связью по скорости. Вывод 4 может использоваться для подключения сигнала аналогового тахогенератора. Обычно более предпочтительно использование импульсного датчика скорости, сигнал которого подается на вход 12. Истинное задание скорости, с которым управляющий усилитель сравнивает значение скорости, поступает с выхода генератора темпа разгона (вывод 7). При заданном значении скорости (напряжение V5 на выводе 5) генератор темпа заряжает внешний конденсатор С7, подключенный к выводу 7, до тех пор, пока V4 (истинная скорость) не сравняется с V5. Внутренний источник тока (1,2 мА) генератора темпа обеспечивает разгон до полной скорости примерно за 5 с. Поскольку одна из модификаций TDA1085 специально предназначена для применения в стиральных машинах, в генераторе темпа предусмотрена возможность резко снизить темп разгона в диапазоне скоростей, задаваемом напряжением V6 (на выводе 6). При V6 <>2V6 разгон продолжается с высоким темпом. Основные характеристики:
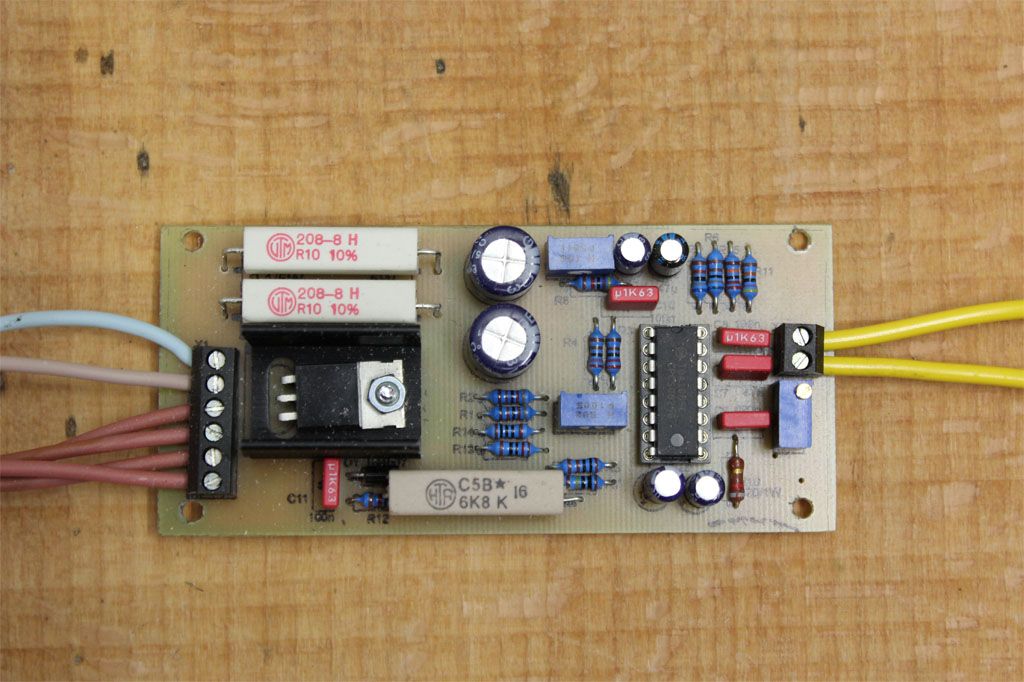
Схема блока управления двигателем дополнена усилителем сигнала датчика оборотов. Универсальная головка от кассетного магнитофона расположена вплотную к шестерне , закрепленной на обратном (нерабочем) конце вала двигателя. Крепление головки должно допускать возможность ее перемещения относительно шестерни для регулировки. Усилитель сигнала головки выполнен на операционном усилителе DA1. Т. к. шестерня отцентрована не идеально, сигнал с головки модулирован по амплитуде с частотой вращения вала. Для устранения этого эффекта в цепь обратной связи включены диоды VD3-VD8, что позволяет ограничить и тем самым стабилизировать амплитуду импульсов, подаваемых на TDA1085C. Последняя включена согласно рекомендациям изготовителя, к которым хочется добавить несколько комментариев:
Подробное описание применения микросхемы TDA1085C читайте в DataSheet. Регулятор смонтирован на печатной плате. К сожалению, исходные файлы в формате Eagle Layout Editor не сохранились, поэтому рисунок печатной платы и схема расположения элементов были восстановлены из сохранившихся бумажных копий. Налаживание устройства несложно. УСТРОЙТВО ИМЕЕТ БЕСТРАНСФОРМАТОРНОЕ ПИТАНИЕ, ПОЭТОМУ ПРИ НАЛАЖИВАНИИ НЕОБХОДИМО СТРОГО СОБЛЮДАТЬ МЕРЫ БЕЗОПАСНОСТИ ПРИ РАБОТЕ С ЭЛЕКТРИЧЕСКИМИ УСТРОЙСТВАМИ ! После проверки правильности монтажа регулятор подключается к сети без двигателя и измеряется напряжение на выводе 9 м\сх DA2. Если регулятор напряжения питания работает нормально, на выводе 9 должно быть около 15v. Далее настраивается датчик оборотов. Двигатель включается в сеть через трансформатор мощностью 200w и выходным напряжением 50-70v или через регулятор мощности (в крайнем случае можно и прямо в сеть, но двигатель при этом будет сильно шуметь). К выводу 12 м\сх DA1 подключается осциллограф для наблюдения за формой импульсов датчика. Далее, перемещением магнитной головки относительно шестерни добиваются максимальной и стабильной амплитуды импульсов тахогенератора. После этого к регулятору подключается двигатель и вращением переменного резистора R17 проверяется диапазон регулировки оборотов. Скорее всего, придется подбирать емкость конденсатора C14 для получения требуемого диапазона регулировки. © Игорь Капинос, 2005 |
Приложение к статье: Важнейший станок «деревянного» моделиста. Схема базируется на рекомендациях фирмы Motorola, указанных в документации на микросхему TDA1085C (см. здесь, российский аналог КС1027ХА4) Эта ИС является контроллером фазового угла управления триаком (симистором), имеющим все необходимые функции для управления скоростью универсального (коллекторного) двигателя переменного тока, например, в стиральных машинах. В состав контроллера входят: внутренний регулятор напряжения для стабилизации питания ИС, встроенный преобразователь частоты в напряжение (детектор скорости), задатчик интенсивности с программируемым генератором темпа разгона, обеспечивающий плавный пуск, ограничитель тока, управляющий усилитель для стабилизации скорости двигателя и генератор импульсов управления триаком. Дополнительно в схеме осуществляется мониторинг напряжения питания Vcc , напряжения задания скорости и импеданса цепи импульсного датчика скорости.
Обычно контроллер работает в конфигурации с замкнутой обратной связью по скорости. Вывод 4 может использоваться для подключения сигнала аналогового тахогенератора. Обычно более предпочтительно использование импульсного датчика скорости, сигнал которого подается на вход 12. Истинное задание скорости, с которым управляющий усилитель сравнивает значение скорости, поступает с выхода генератора темпа разгона (вывод 7). При заданном значении скорости (напряжение V5 на выводе 5) генератор темпа заряжает внешний конденсатор С7, подключенный к выводу 7, до тех пор, пока V4 (истинная скорость) не сравняется с V5. Внутренний источник тока (1,2 мА) генератора темпа обеспечивает разгон до полной скорости примерно за 5 с. Поскольку одна из модификаций TDA1085 специально предназначена для применения в стиральных машинах, в генераторе темпа предусмотрена возможность резко снизить темп разгона в диапазоне скоростей, задаваемом напряжением V6 (на выводе 6). При V6 <>2V6 разгон продолжается с высоким темпом. Основные характеристики:
Схема блока управления двигателем дополнена усилителем сигнала датчика оборотов. Универсальная головка от кассетного магнитофона расположена вплотную к шестерне , закрепленной на обратном (нерабочем) конце вала двигателя. Крепление головки должно допускать возможность ее перемещения относительно шестерни для регулировки. Усилитель сигнала головки выполнен на операционном усилителе DA1. Т. к. шестерня отцентрована не идеально, сигнал с головки модулирован по амплитуде с частотой вращения вала. Для устранения этого эффекта в цепь обратной связи включены диоды VD3-VD8, что позволяет ограничить и тем самым стабилизировать амплитуду импульсов, подаваемых на TDA1085C. Последняя включена согласно рекомендациям изготовителя, к которым хочется добавить несколько комментариев:
Подробное описание применения микросхемы TDA1085C читайте в DataSheet. Регулятор смонтирован на печатной плате. К сожалению, исходные файлы в формате Eagle Layout Editor не сохранились, поэтому рисунок печатной платы и схема расположения элементов были восстановлены из сохранившихся бумажных копий. Налаживание устройства несложно. УСТРОЙТВО ИМЕЕТ БЕСТРАНСФОРМАТОРНОЕ ПИТАНИЕ, ПОЭТОМУ ПРИ НАЛАЖИВАНИИ НЕОБХОДИМО СТРОГО СОБЛЮДАТЬ МЕРЫ БЕЗОПАСНОСТИ ПРИ РАБОТЕ С ЭЛЕКТРИЧЕСКИМИ УСТРОЙСТВАМИ ! После проверки правильности монтажа регулятор подключается к сети без двигателя и измеряется напряжение на выводе 9 м\сх DA2. Если регулятор напряжения питания работает нормально, на выводе 9 должно быть около 15v. Далее настраивается датчик оборотов. Двигатель включается в сеть через трансформатор мощностью 200w и выходным напряжением 50-70v или через регулятор мощности (в крайнем случае можно и прямо в сеть, но двигатель при этом будет сильно шуметь). К выводу 12 м\сх DA1 подключается осциллограф для наблюдения за формой импульсов датчика. Далее, перемещением магнитной головки относительно шестерни добиваются максимальной и стабильной амплитуды импульсов тахогенератора. После этого к регулятору подключается двигатель и вращением переменного резистора R17 проверяется диапазон регулировки оборотов. Скорее всего, придется подбирать емкость конденсатора C14 для получения требуемого диапазона регулировки. © Игорь Капинос, 2005 |
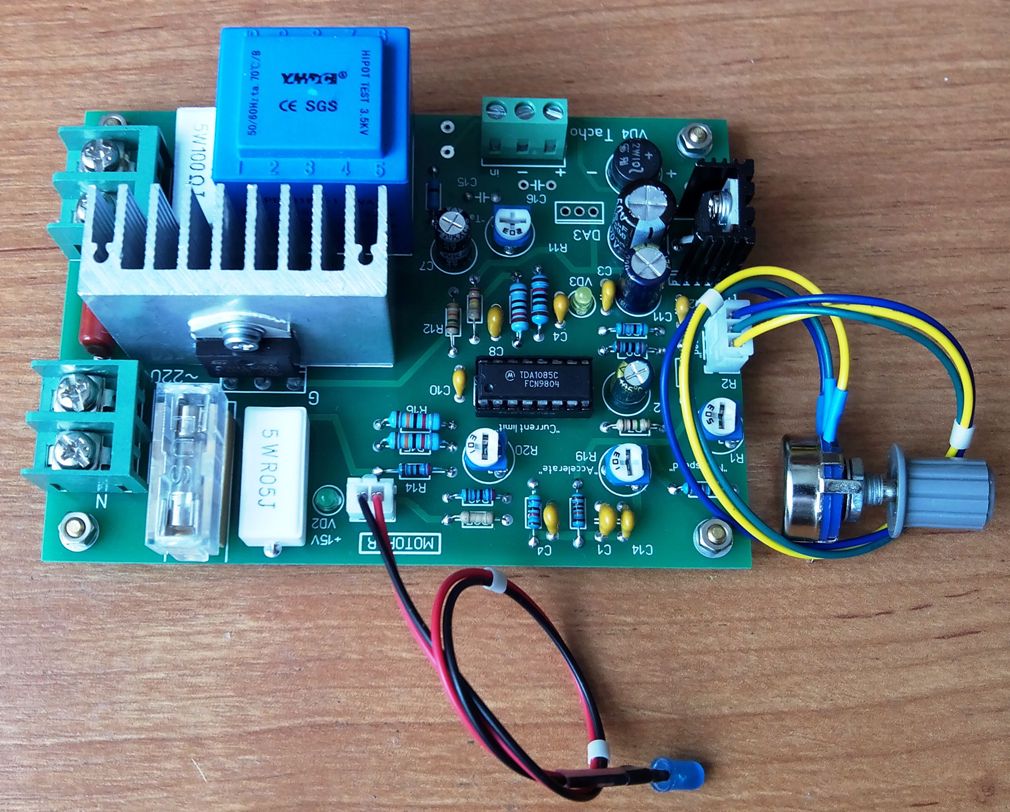
Регулятор оборотов на TDA1085 печатная плата
Схема регулятора на TDA1085 имеет размеры 100*100 мм, что позволить установить в любой небольшой корпус. TDA1085 печатная плата была переделана для лучшей настройки оборотов двигателя от вашей стиралки, плата управления на TDA1085 полностью работоспособная и имеет несколько индикаторов для определения включения и работы самой микросхемы. Все это будет обозначено в инструкции при покупке.Плата регулятора на TDA1085 находит область применения в сверлильных станках, различная автоматика предназначена для открытия-закрытия чего нибудь, фрезеровальные или самодельные гравировочные станки, все зависит от мощности вашего электродвигателя. Сделать регулятор оборотов на TDA1085 своими руками не требует больших знаний электротехники, достаточно иметь паяльник, припой и мультиметр цифровой для определения некоторых деталей. В итоге вы получите полностью готовое и рабочее изделие сделанное собственноручно.
Печатная плата на регулятор TDA1085 может быть куплена в разной валюте, чтобы все заинтересованные люди могли собрать для себя. Регулятор коллекторного двигателя на TDA1085 имеет реверс (изменение направление вращения), особенно популярен в самодельных токарных станках и открытия-закрытия ворот. Также эта схема управления на TDA1085 работает с плавным пуском.
Изначально схема платы TDA1085 рассчитана на мощность примерно до 2 кВт, что-бы увеличить замените предохранитель и симистор BTA41 на более мощный. Регулятор оборотов электродвигателя TDA1085 имеет один переменный резистор 20кОм для регулировки скорости, два светодиода для индикации, вход для 220 Вольт, подключение кнопки вкл/выкл, выходы для тахо, мотора и холла. Монтажная плата регулятора оборотов TDA1085 доступная по ссылкам выше.
BTA41 600 В — это силовая деталь, которая может выходить из строя при запредельных нагрузках. Такой же симистор используют и в стиральных машинках, чаще всего 12А, иногда даже и 24А, все зависит от мощности. У каждого самодельщика возникают вопросы — где взять двигатель и как сделать TDA1085 регулятор оборотов коллекторного двигателя от сети 220 вольт. Почти у каждого есть двигатель от стиральной машинки, высокооборотные. Внутри коллекторного двигателя установлен тахогенератор и плата управления двигателем на TDA1085 имеет обратную связь с этим тахогенератором, в результате получается регулятор оборотов стиралки.
Посмотрите два очень интересных видео, где на подобных платах люди сделали самодельный токарный и сверлильный станок:
шаблоны для dle 11.2
DESCRIPTION
Здесь представлен простой регулятор оборотов коллекторного двигателя на микросхеме TDA1085 с исправленными ошибками в обозначениях. Также немного изменена печатная плата.
Here is described a simple speed regulator of the collector motor on the TDA1085 chip. Errors in the notations have been corrected, and there are small changes to the printed circuit board.
TECHNICAL DETAILS / COMPONENTS
Перечень элементов
List of elements
C1 = 1.0
C2 = 100μ 63V
C3* = 470
C4 = 1.0
C5 = 100n
C6 = 100n
C7 = 47μ 63V
C8 = 47n
C9 = 100μ 63V
C10 = 100n
C11 = 100n
C12 = 220μ 63V
C13 = 100n (400 – 600) V
C14 = 1.0 μ (400 – 600) V
C15 = 1.0 μ
FUSE = 10A
R1 = 100k RM-065 ( 3362P)
R2 = 10k
R3 = 1k 0.25W
R4 = 100k 0.25W
R5 = 1M 0.25W
R6 = 470k 0.25W
R7 = 220k 0.25W
R8 = 820 0,5W
R9 = 47k 0.25W
R10 = 2k 1W
R12 = 20k 0.25W
R13 = 6k8 0.25W
R14 = 2k7 0.25W
R15 = 820k 0.5W
R16 = 820k 0.5W
R17 = 120 0.5W
R18 = 110k 0.25W
R19 = 3k9 0.25W
R21 = 0.05 5W
R24 = 100 5W
R25 = 4k7 0.25W
R27 = 270 2W
R29 = 62 2W
R30 = 150K 3W
VD1 = BTA41-600
VD2 = led
VD3 = led
VD4 = FR207
VD5 = 1N5359
LEARN / TOPIC / BUILD INSTRUCTIONS
My YouTube-Canal — roshansky
Дополнительная информация размещена на сайте — http://www.motor-r.info/
Additional information is available on the site — http://www.motor-r.info/
Страница сайта — http://www.motor-r.info/p/tda1085_30.html
Site Page — http://www.motor-r.info/p/tda1085_30.html
Блок управления, регулятор оборотов на TDA1085 для электродвигателя
Описание устройства
Данная плата служит для управления коллекторным двигателем который оснащен таходатчиком или датчиком холла. Такие двигатели установлены на современные стиральные машины Indesit, Samsung, LG и другие. Регулятор позволяет изменять скорость вращения вала двигателя с поддержанием мощности в пределах 0 — 15000 оборотов в минуту. Устройство собрано на базе микросхемы TDA 1085C.
Микросхема TDA 1085C управляет симистором в соответствии с задаваемой скоростью. Установлен мощный симистор с током до 40А что обеспечивает большой запас по мощности регулятора.Плата полностью собрана настроена и проверена. При изготовлении применен стеклотекстолит фольгированный двухсторонний FR-4 с номинальной толщиной 1,6 мм, облицованный медной фольгой толщиной 70 мкм с двух сторон. Отверстия металлизированные, нанесена защитная маска и шелкография с разметкой элементов. После нанесения защитных масок общая толщина составляет 1.9 мм.
Устройство не только регулирует обороты, но и надежно поддерживает их при появлении нагрузки на валу!
На плате установлены подстроечные резисторы для настройки:
— Максимальных оборотов
— Скорости набора оборотов при вращении потенциометра
— Скорости реакции платы на появление нагрузки на валу
— Подстройки и синхронизации работы таходатчика
В комплектацию платы регулятора оборотов входит:
1. Спаянная, настроенная и проверенная плата регулятора оборотов.
2. Переменный резистор с пластиковой ручкой.
3. Клавишный переключатель включения контроллера.
4. Клавишный переключатель направления вращения (Для реверса).
5. Светодиод индикации.
6. Запасной предохранитель.
7. Краткое описание.
Есть в наличии комплект платы регулятора оборотов со всеми необходимыми проводами. Помимо самой платы в комплект входит:
- Сетевой шнур для подключения питания длинной 1 метр.
- Провод для подключения таходатчика длинной 1 метр
- Провода для подключения двигателя с распаянным тумблером реверса. От тумблера до двигателя 1 метр
- Светодиод с проводом 20 см.
- Тумблер включения с проводом 20 см.
- Резистор регулятора оборотов с с проводами 20 см.
- Запасной предохранитель и краткое описание прилагаются
Стоимость платы регулятора оборотов с комплектом проводов составит 800 грн. Если вам необходим такой комплект, то обязательно сообщите об этом по телефону и напишите в комментарии к заказу.
Видео обзор платы регулятора оборотов с обратной связью:
Подключение реверса для платы регулятора оборотов для двигателей от стиральных машин на TDA1085
Техника безопасности при работе с регулятором
Для того чтобы избежать поражения электрическим током соблюдайте основные меры безопасности:
— Никогда не прикасайтесь к подключенной к сети 220v плате руками.
— С осторожностью проводите настройку платы, при необходимости делайте это при помощи отвертки с прорезиненной ручкой.
— Будьте аккуратны с переменным резистором, на нем тоже присутствует напряжение в местах подключения к клемм и в местах соединения с проводами.
— Настоятельно рекомендую сначала подключить двигатель и сетевой провод к плате, а затем уже подключать к сети 220V. — Желательно плату поместить в корпус, предусмотрев отверстия для вентиляции. Если корпус металлический обязательно его заземляем, вместе с двигателем.
— Не допускайте перегрева симистора, отслеживайте температуру на радиаторе. Температура не должна превышать 80С. Не прикасайтесь к радиатору до отключения регулятора от сети.
— Помните, что в случае выхода симистора из строя, двигатель может выйди на максимальные обороты, поэтому установите кнопку аварийного отключения питания.
Подключение коллекторного электродвигателя с тахогениратором или датчиком Холла к регулятору оборотов с обратной связью на контроллере TDA1085
Внимание!!! Провода обозначенные на схеме синим цветом подключаются только в том случае если ваш двигатель с датчиком Холла! Если ваш двигатель с таходатчиком, то их подключать не нужно! Схема не заработает. Это стало распространенной ошибкой среди покупателей.
Ознакомится с особенности подключения датчика Холла вы можете в статье перейдя по ссылке
Схема коммутации реверса коллекторного двигателя:
% PDF-1.1 % 1 0 obj [/ CalRGB > ] endobj 2 0 obj > endobj 3 0 obj > endobj 4 0 obj > endobj 5 0 obj > поток 0 0 0 0 0 0 d1 конечный поток endobj 6 0 obj > поток 666 0 21-20 637 721 d1 21 351 кв.м. 21108129-20 333-20 в 538-20 646 107 646 351 в 646 595 538 721 333 721 c 129 721 21 595 21 351 c час 430 351 кв.м. 430 209 408 144 333 144 c 257 144 235 209 235 351 c 235 493 257 559 333 559 в 408 559 430 493 430 351 в ж конечный поток endobj 7 0 объект > поток 666 0 98-4 470 705 d1 263 0 месяцев 471 0 л 471 701 л 309 701 л 292 595 232 556 102 554 c 102 408 л 263 408 л 263 0 л ж конечный поток endobj 8 0 объект > поток 666 0 21-20 621 701 d1 21 186 кв.м. 50 57 157-20 321-20 в 517-20 630 79 630 241 в 630 377 533 465 391 465 в 334 465 287 456 244 432 в 265 532 л 573 532 л 573 701 л 121 701 л 51 312 л 244 296 л 265 321 293 335 328 335 c 383 335 422 296 422 236 c 422 178 384 142 323 142 в 276 142 243 163 227 206 c 21 186 л ж конечный поток endobj 9 0 объект > поток 666 0 25-18 629 720 d1 140 371 кв.м. 62 340 25 287 25 208 в 25 66 134-18 332-18 в 529-18 638 66 638 208 в 638 287 602 340 523 371 c 586 403 616 449 616 515 в 616 639 512 720 332 720 в 151 720 48 639 48 515 в 48 449 77 403 140 371 c час 240 502 кв.м. 240 543 277 575 332 575 c 386 575 422 543 422 502 c 422 454 391 425 332 425 c 273 425 240 454 240 502 c час 234 220 кв.м. 234 277 271 310 332 310 c 393 310 429 276 429 220 в 429 166 395 134 332 134 c 269 134 234 166 234 220 в ж конечный поток endobj 10 0 obj > поток 776 0-3 0 737 719 d1 -3 0 мес. 236 0 л 266 95 л 508 95 л 536 0 л 778 0 л 511 719 л 264 719 л -3 0 л час 310 246 кв.м. 387 495 л 463 246 л 310 246 л ж конечный поток endobj 11 0 объект > поток 776 0 37-20 747 738 d1 530 279 кв.м. 523 202 479 160 409 160 c 316 160 268 228 268 359 c 268 492 312 558 403 558 c 476 558 517 520 524 447 в 743 447 л 729 633 607 738 400 738 c 177 738 37 594 37 359 в 37 125 176-20 405-20 в 610-20 734 90 747 279 в 530 279 л ж конечный поток endobj 12 0 объект > поток 778 0 67 0 740 719 d1 67 0 месяцев 302 0 л 413 0 497 2 557 30 в 678 84 740 196 740 359 в 740 514 690 620 591 678 c 526 716 446 719 344 719 c 67 719 л 67 0 л час 297 182 кв.м. 297 537 л 361 537 л 469 537 510 489 510 359 в 510 225 471 182 358 182 c 297 182 л ж конечный поток endobj 13 0 объект > поток 944 0 68 0 876 719 d1 276 0 месяцев 276 347 л 276 374 275 418 273 480 c 283 428 292 383 302 344 в 392 0 л 552 0 л 641 352 л 647 376 658 419 671 480 c 670 415 670 372 670 354 в 668 0 л 876 0 л 876 719 л 596 719 л 494 359 л 489 342 481 307 471 255 c 457 316 450 351 448 360 c 348 719 л 68 719 л 68 0 л 276 0 л ж конечный поток endobj 14 0 объект > поток 722 0 34-20 677 738 d1 34 224 кв.м. 49 71 164-20 360-20 в 572-20 686 71 686 227 в 686 301 657 353 593 395 в 546 426 474 440 384 463 в 313 481 276 488 276 526 c 276 559 300 575 350 575 c 406 575 437 555 444 512 c 666 512 л 653 657 542 738 354 738 c 159 738 48 648 48 509 в 48 438 75 383 132 343 в 162 322 228 300 329 274 в 415 252 458 248 458 203 в 458 172 427 151 370 151 в 306 151 275 171 262 224 c 34 224 л ж конечный поток endobj 15 0 объект > поток 724 0 13 0 654 719 d1 239 0 месяцев 491 0 л 491 530 л 712 530 л 712 719 л 13 719 л 13 530 л 239 530 л 239 0 л ж конечный поток endobj 16 0 объект > поток 834 0 68-20 750 719 d1 68 719 кв.м. 68 258 л 68 78 190-20 417-20 в 645-20 765 78 765 258 в 765 719 л 529 719 л 529 276 л 529 197 502 162 417 162 c 333 162 304 197 304 276 c 304 719 л 68 719 л ж конечный поток endobj 17 0 объект > поток 667 0 40-19 627 550 d1 421 0 месяцев 626 0 л 626 15 л 612 25 604 41 604 60 в 604 356 л 604 427 592 467 538 505 c 503 529 432 550 338 550 c 158 550 65 488 63 369 c 262 369 л 266 405 288 422 331 422 c 380 422 405 409 405 378 c 405 329 362 334 263 321 в 111 301 40 268 40 150 в 40 43 105-19 222-19 в 297-19 356 3 409 51 в 421 0 л час 403 237 кв.м. 404 228 404 219 404 210 c 404 140 375 108 306 108 c 268 108 248 126 248 156 в 248 207 308 200 403 237 в ж конечный поток endobj 18 0 объект > поток 668 0 31-19 612 719 d1 324 137 кв.м. 272 137 240 181 240 260 c 240 343 266 383 324 383 в 383 383 410 343 410 260 в 410 181 377 137 324 137 c час 611 0 месяцев 611 719 л 408 719 л 408 474 л 367 523 317 547 253 547 в 125 547 31 436 31 263 в 31 90 123-19 255-19 в 325-19 382 8 427 65 в 427 0 л 611 0 л ж конечный поток endobj 19 0 объект > поток 666 0 29-19 636 550 d1 417 157 кв.м. 407 129 379 113 338 113 c 277 113 242 151 240 219 c 636 219 л 636 232 л 636 432 522 550 334 550 c 145 550 29 439 29 261 c 29 92 142-19 326-19 в 490-19590 42 619 157 в 417 157 л час 240 325 м 243 388 277 424 332 424 в 392 424 424 391 428 325 c 240 325 л ж конечный поток endobj 20 0 объект > поток 335 0 61 0 272 737 d1 61 0 месяцев 272 0 л 272 531 л 61 531 л 61 0 л час 61 585 кв.м. 272 585 л 272 737 л 61 737 л 61 585 л ж конечный поток endobj 21 0 объект > поток 335 0 61 0 272 719 d1 61 0 месяцев 272 0 л 272 719 л 61 719 л 61 0 л ж конечный поток endobj 22 0 объект > поток 667 0 56 0 616 545 d1 56 0 мес. 262 0 л 262 274 л 262 346 287 381 339 381 c 396 381 409 348 409 275 в 409 0 л 615 0 л 615 276 л 615 368 613 432 572 481 c 538 523 488 545 425 545 в 350 545 291 515 243 453 c 243 531 л 56 531 л 56 0 л ж конечный поток endobj 23 0 объект > поток 667 0 29-19 629 550 d1 29 266 кв.м. 29 90 144-19 334-19 в 523-19 638 90 638 266 в 638 442 523 550 334 550 c 144 550 29 442 29 266 c час 245 266 кв.м. 245360 269 403 334 403 в 399 403 423 360 423 266 c 423 172 399 128 334 128 c 269 128 245 172 245 266 в ж конечный поток endobj 24 0 объект > поток 668 0 57 -213 639 545 d1 57-213 кв.м. 259-213 л 259 50 л 296 3 343-18 407-18 в 547-18 639 91 639 264 в 639 435 544 545 411 545 в 336 545 283 520 242 463 в 242 531 л 57 531 л 57-213 л час 431 264 кв.м. 431 184 401 144 345 144 c 288 144 259 184 259 264 в 259 348 285 387 347 387 в 404 387 431 347 431 264 c ж конечный поток endobj 25 0 объект > поток 444 0 56 0 425 545 d1 56 0 мес. 263 0 л 263 218 л 263 300 300 337 383 337 в 396 337 409 336 425 334 в 425 545 л 406 545 л 323 545 273 512 246 434 в 246 531 л 56 531 л 56 0 л ж конечный поток endobj 26 0 объект > поток 609 0 31-19 580 550 d1 31 167 кв.м. 40 43 129-19 300-19 в 485-19 580 44 580 165 в 580 280 507 309 350 345 c 285360250360250 398 c 250 421 269 435 306 435 c 344 435 370 414 373 383 в 562 383 л 549 493 463 550 304 550 c 133 550 45 488 45 375 в 45 263 120 234 284 199 c 342 186 372 182 372 144 c 372 116 348 100 303 100 в 258 100 235 122 235 167 в 31 167 л ж конечный поток endobj 27 0 объект > поток 445 0 17-9 403 695 d1 312 197 кв.м. 312 409 л 415 409 л 415 531 л 312 531 л 312 695 л 94 695 л 94 531 л 17 531 л 17 409 л 94 409 л 94 143 л 94 28 145-9 281-9 в 323-9 369-7 417-4 в 417 149 л 405 148 395 148 386 148 в 333 148 312 159 312 197 c ж конечный поток endobj 28 0 объект > поток 609 0-6 0 587 531 d1 188 0 месяцев 435 0 л 616 531 л 405 531 л 310 212 л 214 531 л -6 531 л 188 0 л ж конечный поток endobj 30 0 объект > поток pP @ iAP @ 0 A & e3! H4DFC! 5EM (K j «1w I (! u 9E @ P ,, % L1ƃR] * P # = c Se Uɘ ޱ cJKNq ؤ l5 (wANPe6’C) rP; Ty (Lf jtJ4zte4v; Cd Jr, {r К61Н = -.鳺 дБ {& q2T = DJ? AalJ «Z;] FI7 JEjJKAJT.gX] & 2 ¢ m # .- H ꊦ2 * hbЈj \ g4k? N˪Kb?: {- Ȧ «H ‘! XF» ΩBa (ӵ-X! UD K:
TDA1085C datasheet — Универсальный контроллер двигателя BY Triac Phase Angle Control,
ADD8707 : 12 + 1 Gamma / vcom Reference с регулятором ADD8707 — это 12-канальный, интегрированный Gamma Reference с Vcom для использования в ЖК-мониторах с высоким разрешением TFT и телевизионных панелях. Выходные буферы имеют низкое напряжение смещения и Сильноточный привод в условиях переходной нагрузки для получения точной и стабильной гамма-кривой.Два канала переходят на VDD и два канала.
DS1336 : Чип форсажной камеры. Обеспечивает переключение до 1,5 А при напряжении от 3,0 до 5,0 В Пять отдельных переключателей питания Выбираемые переключатели батареи для использования с системами с резервным питанием Очень низкое сопротивление 0,7 Ом Резервный ток батареи мА Диодно-изолированный путь батареи Доступен в 16-контактных DIP или 16 -pin SOIC пакет для поверхностного монтажа Аккумулятор с низким падением напряжения.
FM1501-7R : DC-DC преобразователи мощностью 50 Вт.Широкое входное напряжение от или 3 изолированных выхода кВ переменного тока Входы / выходы испытательное напряжение на электрическую прочность Прочная электрическая и механическая конструкция Выходы с индивидуальным управлением с превосходными динамическими характеристиками Диапазон рабочих температур окружающей среды 4071 C Выход 1 Выход 2 Uo nom Io nom Uo nom Io nom [В постоянного тока ] [A] [В постоянного тока] [A] Выход 1 Выход 2 Uo nom Io nom Uo nom Io nom [В постоянного тока] [A] [В постоянного тока] [A] Выход.
KA1L0380B-TU : Выключатель питания Fairchild (SPS). Прецизионная фиксированная рабочая частота KA1H0380RB (100 кГц) Импульс за импульсом с ограничением по току Защита от перегрузки Защита от перенапряжения (мин.23 В) Функция внутреннего теплового отключения Блокировка при пониженном напряжении Внутренний датчик высокого напряжения на полевых транзисторах Автоматический перезапуск (KA1L0380RB / KA1M0380RB / KA1H0380RB) Семейство продуктов SPS специально разработано для автономных SMPS.
MC44608 : Несколько внешних компонентов Надежный и гибкий ШИМ-контроллер Greenlinetm с очень высоким напряжением.
RC1616x33 : фиксированный стабилизатор напряжения 3,3 В, 0,5 А, с малым падением напряжения (LDO). Низкое падение напряжения. Регулировка нагрузки: 0,05% типично. Ограничение тока. Встроенное тепловое ограничение. Стандартные корпуса SOT-223 и TO-252. Три контакта, регулируемые или фиксированные, или 5 В RC1616 и RC1616-2.5, -3,3 и -5 — трехконтактные регуляторы с малым падением напряжения и выходным током 0,5 А. Эти устройства были оптимизированы для работы с низким напряжением в переходных режимах.
TC396AL / CL : логика высокой помехоустойчивости. Логика высокой помехоустойчивости, упаковка: See_factory.
TPS76030DBVR : ti TPS76030, маломощный регулятор с малым падением напряжения (LDO) на 50 мА. Стабилизатор с малым падением напряжения на 50 мА Варианты фиксированного выходного напряжения: 3,2 В и падение напряжения 3 В Обычно 50 мА Тепловая защита Менее 1 А Ток покоя при отключении до 125 ° C Диапазон рабочих температур перехода 5-контактный корпус SOT-23 Подтвержденная защита от электростатических разрядов 1 .Модель человеческого тела (HBM) на 5 кВ в соответствии с MIL-STD-883C Разработан регулятор напряжения 50 мА с малым падением напряжения (LDO).
UA78L02ACD : ti UA78L02A, стабилизатор постоянного положительного напряжения 2 В, 100 мА. Трехконтактные регуляторы Выходной ток мА Без внешних компонентов Внутренняя защита от перегрева Внутренняя защита от короткого замыкания Эта серия интегральных стабилизаторов напряжения с фиксированным напряжением предназначена для широкого спектра применений. Эти приложения включают встроенное регулирование для устранения шума и связанных с этим проблем распределения.
UC2825DW : Текущий режим. ti UC2825, Высокоскоростной ШИМ-контроллер.
UC3845AD : Текущий режим. ti UC3845A, ШИМ-контроллер текущего режима. Оптимизирован для автономных преобразователей и преобразователей постоянного тока. Низкий пусковой ток (<0,5 мА). Регулировка тока разряда генератора. Автоматическая компенсация прямой подачи. Ограничение тока между импульсами. Улучшенные характеристики отклика на нагрузку. Блокировка при пониженном напряжении с гистерезисным двойным подавлением импульсов. V 8.5V UVLO Off 10.Максимальный рабочий цикл 0 В 7,9 В UC1842A / 3A / 4A / 5A.
AAT3685 : Линейное зарядное устройство для литий-ионных / полимерных аккумуляторов AAT3685 BatteryManager является членом семейства продуктов Total Power Management IC (TPMIC) компании AnalogicTech. Это устройство представляет собой высокоинтегрированную интегральную схему зарядного устройства для литий-ионных / полимерных аккумуляторов с одной ячейкой, предназначенную для работы с USB-портом или входами линейного адаптера. Требуется минимальное количество внешних компонентов ..
MIC68220 : MIC68220 — это двойной стабилизатор LDO с высоким пиковым током, разработанный специально для питания приложений, таких как напряжения ядра FPGA, которые требуют высокого пускового тока при более низком номинальном рабочем токе.MIC68220 способен выдавать ток 2 А на канал для запуска и обеспечивает высокую мощность от небольшого безвыводного корпуса MLF. MIC68220 также может.
STw4811M : ИС управления питанием Управление питанием процессоров мультимедийных приложений.
MAX4193 : Повышающий импульсный стабилизатор CMOS Micropower Стабилизаторы постоянного тока MAX630 и MAX4193 CMOS компании Maxim разработаны для простых, эффективных схем преобразователя постоянного тока минимального размера в диапазоне от 5 мВт до 5 Вт. MAX630 и MAX4193 обеспечивают все функции управления и управления питанием в компактном 8-контактном корпусе: 1.Опорный сигнал с шириной запрещенной зоны 31 В, генератор, компаратор напряжения.
TDA1085CG. Универсальный регулятор скорости двигателя
1 Универсальный регулятор скорости двигателя TDA1085C — это симисторный регулятор угла сдвига фаз, имеющий все необходимые функции для универсального управления скоростью двигателя в стиральных машинах.Он работает в конфигурации с замкнутым контуром и обеспечивает две возможности линейного изменения скорости. Характеристики OnChip Преобразователь частоты в напряжение OnChip Ramps Generator SoftStart Ограничение тока нагрузки Цепь тахогенератора Определение прямого питания от сети переменного тока Функции безопасности, выполняемые монитором Доступен пакет PbFree alue Блок питания, при внешнем регулировании, вывод 9 CC 15 Максимальное напряжение на указанный вывод Вывод 3 Вывод Вывод 10 Максимальный ток на указанный вывод Вывод 1 и 2 Вывод 3 Вывод 9 (CC) Вывод 10 шунтирующий регулятор Вывод 12 Вывод 13 Чувствительность к электростатическому разряду (ESD) Модель человеческого тела, класс 1B, модель машины JESD22 A114C, класс A, модель зарядного устройства JESD22 A115A, класс I, контакт JESD22 C101C к + CC 0 до +17 I, контакт 3.От 0 до Максимальное рассеивание мощности P D 1,0 Вт Тепловое сопротивление, переход к воздуху R JA 65 C / Вт Рабочая температура перехода T J от 10 до +120 C Диапазон температур хранения T stg от 55 до +150 C Напряжения, превышающие максимально допустимые, могут повредить устройство. Максимальные рейтинги — это только рейтинги стресса. Функциональная работа сверх рекомендуемых условий эксплуатации не подразумевается. Длительное воздействие нагрузок, превышающих рекомендуемые условия эксплуатации, может повлиять на надежность устройства. ma 16 1 PDIP16 C SUFFIX CASE 648 СХЕМА МАРКИРОВКИ ПЛАСТИКОВОЙ УПАКОВКИ 16 1 TDA1085C AWLYYWWG TDA1085C = Код устройства A = Место сборки WL = Партия пластин YY = Год WW = Рабочая неделя G = Пакет без свинца ИНФОРМАЦИЯ ДЛЯ ЗАКАЗА Доставка пакета устройства TDA1085C PDIP16 25 шт. / направляющая TDA1085CG PDIP16 (PbFree) 25 шт. На шину * Для получения дополнительной информации о нашей стратегии PbFree и деталях пайки, пожалуйста, загрузите Справочное руководство по методам пайки и монтажа полупроводников ON, SOLDERRM / D.Semiconductor Components Industries, LLC, 2007 г., июль, 2007 г. Номер для заказа в редакции издания: TDA1085C / D
2 + CC Шунтирующий регулятор Напряжение балластного резистора Мониторинг регулятора Сброс детектора скорости Триггерный импульс Генератор линейного изменения + управляющий усилитель 0,7 = ограничитель тока CC Цифровой датчик скорости Конденсатор насоса F / C Фактическая заданная скорость Скорость изменения тока Генератор управления Предел тока двигателя Ограничение тока двигателя .Синхронизация Стабильность замкнутого контура Пилообразный конденсатор Пилообразный набор Синхронизация напряжения Синхронизация тока Синхронизация тока Триггерный импульсный выход Рисунок 1. Типичная блок-схема и соединения контактов ЭЛЕКТРИЧЕСКИЕ ХАРАКТЕРИСТИКИ (TA = 25 C) Характерный символ Мин. Тип Макс. Ед. Контакт 7 = 0, I Контакт 9 + I Контакт 10 = 15 мА, I Контакт 13 = 0) CC Температурный коэффициент CC TF 100 ppm / C Потребление тока (I Контакт 9) (9 = 15, 12 = 8 = 0, I 1 = I 2 = 100 A, все остальные контакты не подключены) I CC ma CC Monitoring Enable Level CC Monitoring Disable Level CC EN CC DIS CC 0.4 CC 1.0 RAMP GENERATOR Опорная скорость Диапазон входного напряжения Опорный контакт Входной ток смещения I Контакт A Выбор линейного изменения Входной ток смещения I Вывод A Диапазон начального уровня распределения DS Вывод конечного уровня распределения DS Вывод 6 = 0,75 DF / DS Ток заряда высокого ускорения Вывод 7 = вывод 0 7 = 10 I Pin ma Распределение тока зарядки Контакт 7 = 2,0 I Pin A 2
3 ЭЛЕКТРИЧЕСКИЕ ХАРАКТЕРИСТИКИ (продолжение) Характеристика Символ Мин Тип Макс Единица ОГРАНИЧИТЕЛЬ ТОКА Ограничитель Коэффициент усиления по току I Контакт 7 / I Контакт 3 (I Pin3 = 300 A) Пороговое напряжение обнаружения I Контакт 3 = 10 AC g Контакт 3 TH m ЧАСТОТА НА КОНТЕРТЕРЕ ПИТАНИЯ Входной сигнал Низкое напряжение Входной сигнал Мониторинг высокого напряжения Напряжение сброса 12 L 12 H 12 R мм Отрицательное напряжение зажима I Контакт 12 = 200 A 12 CL 0.6 Входной ток смещения I Pin12 25 A Коэффициент усиления внутреннего источника тока GI Pin 4, I Pin 4 Pin 11 0 Pin 11 G Линейность усиления в зависимости от напряжения на контакте 4 (G 8.6 = усиление для контакта 4 = 8,6) 4 = 0 4 = = 12 G / G Gain Temperature Effect (Pin 4 = 0) TF 350 ppm / C Выходной ток утечки (I Pin 11 = 0) I Pin na УСИЛИТЕЛЬ УПРАВЛЕНИЯ Фактическая скорость Входной диапазон Напряжение на входе Контакт Смещение входа Контакт 5 Контакт 4 (I Контакт 16 = 0, вывод 16 = 3,0 и 8,0) Крутизна усилителя (вывод I 16 / (5 4) (вывод I 16 = + и 50 A, вывод 16 = 3,0) выключен 0 50 м TA / возможность качания выходного тока Источник тока Потребитель I Вывод A Output Saturation Oltage 16 sat 0.8 ГЕНЕРАТОР ИМПУЛЬСОВ ТРИГГЕРА Уровень синхронизации Напряжение тока Измерение линии Измерение симистора I Вывод 2 I Вывод 1 ± 50 ± 50 ± 100 ± 100 A Длительность импульса запуска (вывод C 14 = 47 нФ, вывод R 15 = 270 кОм) T p 55 с Период повторения импульсов, условия как TR 220 с Выходной импульсный ток, вывод 13 = CC 4.0 I Pin ma Выходной ток утечки, вывод 13 = 3.0 I 13 L 30 A Полноугловая проводимость Входное напряжение Высокий уровень зуба пилы Напряжение 14 H Ток разряда зубьев пилы, I Pin15 = 100 AI Контакт A 3
4 ОБЩЕЕ ОПИСАНИЕ TDA 1085C запускает симистор в соответствии с требованиями регулирования скорости.Скорость двигателя в цифровом виде измеряется тахогенератором и затем преобразуется в аналоговое напряжение. Установленная скорость внешне фиксируется и применяется к входу внутреннего линейного регулирования после подачи на программируемые линейные изменения ускорения. Общий результат состоит в полном диапазоне скоростей двигателя с двумя рамками ускорения, которые позволяют эффективно управлять стиральной машиной (функция распределения). Кроме того, TDA 1085C защищает всю систему от отключения или колебаний линии переменного тока, перегрузки по току в двигателе и отказа тахогенератора.Регулятор напряжения (контакты 9 и 10) Это стабилизатор параллельного типа, способный пропускать большой ток и предлагающий хорошие характеристики. Протекание тока обеспечивается от линии переменного тока внешними падающими резисторами R1, R2 и выпрямителем: этот полуволновой ток используется для питания подавляющего конденсатора, напряжение которого проверяется микросхемой. Когда достигается CC, превышение тока создается другим понижающим резистором R10 и выводом 10. Эти три резистора должны определяться в следующем порядке: Допустить 1.Поток 0 мА через контакт 10, когда линия переменного тока минимальна, а потребление CC максимальное (присутствуют быстрые линейные изменения и импульсы). Чтобы 10 достигло 3,0, когда линия переменного тока обеспечивает максимальный ток, а потребление CC минимально (без линейных изменений и без импульсов). На протяжении всего цикла основной линии динамический диапазон контакта 10 не должен превышаться, за исключением случаев потери регулирования. Неисправность сети переменного тока может вызвать отключение. Двойной емкостный фильтр с R1 и R2 обеспечивает эффективное сглаживание CC и помогает удалить шум на заданных скоростях.Измерение скорости (контакты 4, 11, 12) ИС совместима с внешним аналоговым датчиком скорости: его выход должен быть подключен к контакту 4, а контакт 12 — к контакту 8. В большинстве приложений более удобно использовать цифровое определение скорости с недорогим тахогенератором, не нуждающимся в настройке. Во время каждого положительного цикла на выводе 12 конденсатор C на выводе 11 заряжается почти до CC, и в течение этого времени вывод 4 выдает ток, который в 10 раз больше, чем на один зарядный вывод C 11. Коэффициент усиления источника тока называется G и строго определен. , но, тем не менее, требует регулировки на R-выводе 4.Ток в этом резисторе пропорционален контакту 11 C и скорости двигателя; будучи отфильтрованным конденсатором, контакт 4 заглушается и представляет истинную фактическую скорость двигателя. Чтобы поддерживать линейность в диапазоне высоких скоростей, важно убедиться, что вывод C 11 полностью заряжен: внутренний источник на выводе 11 имеет сопротивление 100 К. Тем не менее, вывод C 11 должен быть как можно выше, так как он имеет большое влияние на температурный фактор F / C. Резистор 470 K между контактами 11 и 9 снижает токи утечки ВХОДА / ВЫХОДА (см. Рисунки 1 и 8), а также температурный фактор, вплоть до незначительных эффектов.Вывод 12 также выполняет функцию мониторинга: когда его напряжение выше 5,0, импульсы запуска блокируются, и IC сбрасывается. Он также определяет непрерывность тахогенератора и, в случае любого апертуры цепи, блокирует импульс, предотвращая выход двигателя из-под контроля. В TDA 1085C контакт 12 отрицательно зажат внутренним диодом, что устраняет необходимость использования внешнего диода в прежней схеме. Генератор рампы (выводы 5, 6, 7) Истинное значение установленной скорости, учитываемое при регулировании, является выходным сигналом генератора рампы (вывод 7).При заданном значении входной уставки скорости (вывод 5) генератор рампы заряжает внешний конденсатор C, вывод 7, до момента, когда вывод 5 (заданная скорость) не станет равным выводу 4 (истинная скорость), см. Рис. 2. ИС имеет внутренний конденсатор. источник зарядного тока 1,2 мА и подает его от 0 до 12 на выводе 7. Это высокая линейная характеристика ускорения (обычно 5,0 с), которая позволяет быстро изменять скорость двигателя без чрезмерных нагрузок на механику. Кроме того, TDA 1085C предлагает возможность прервать это высокое ускорение за счет введения низкой рампы ускорения (называемой распределением), уменьшив ток источника на выводе 7 до 5.0 A при полном управлении выводом 6, как показано при следующих условиях: Наличие высокого темпа ускорения Вывод 5> вывод 4 Распределение происходит в диапазоне вывода 4 (истинная скорость двигателя), определяемого выводом 6 Вывод 6 Для двух фиксированных значений вывода 5 и вывод 6, скорость двигателя будет иметь высокое ускорение, за исключением времени, за которое вывод 4 перейдет от вывода 6 к удвоенному значению, снова высокое ускорение, до момента, когда двигатель достигнет заданного значения скорости, при котором он будет оставайтесь, см. рисунок 3. Если произойдет сброс (какой бы ни была причина), вышеупомянутые последовательные линейные изменения будут полностью повторно обработаны от 0 до максимальной скорости.Если контакт 6 = 0, происходит только быстрое ускорение. Чтобы получить реальное положение нулевой скорости, вывод 5 был спроектирован таким образом, что его напряжение от 0 до 80 м интерпретируется как истинный ноль. Как следствие, при изменении заданного положения скорости разработчик должен быть уверен, что никакого переходного нуля не произойдет: если он есть, то будет сброшена вся схема. 4
5 Поскольку напряжения, подаваемые на контакты 5 и 6, поступают от внутреннего источника питания регулятора напряжения, а напряжение на контакте 4 также поступает от того же источника, скорость двигателя (которая определяется соотношением между упомянутыми выше напряжениями) полностью не зависит от CC вариации и температурный фактор.Управляющий усилитель (вывод 16) Он усиливает разницу между истинной скоростью (вывод 4) и заданной скоростью (вывод 5) через генератор рампы. Его выход, доступный на выводе 16, представляет собой источник тока с двойным считыванием с максимальной мощностью ± 100 А и заданной крутизной (типично 340 А). Контакт 16 напрямую управляет генератором триггерных импульсов и должен быть нагружен электрической сетью, которая компенсирует механические характеристики двигателя и его нагрузку, чтобы обеспечить стабильность в любых условиях и кратчайший переходный отклик; см. рисунок 4.Эту сеть необходимо настроить экспериментально. В случае периодических изменений крутящего момента контакт 16 напрямую обеспечивает колебания фазового угла. Генератор пусковых импульсов (выводы 1, 2, 5, 13, 14, 15) Эта схема выполняет четыре функции: Преобразование уровня выходного сигнала постоянного тока управляющего усилителя в пропорциональный угол зажигания на каждом полупериоде основной линии. Калибровка длительности импульса. Повторение импульса, если симистор не срабатывает, если ток был прерван из-за отскока щетки. Задержка пускового импульса до тех пор, пока ток не пересечет ноль при больших углах зажигания и индуктивных нагрузках.R Pin 15 программирует ток разряда Pin 14. Тогда сигнал зуба пилы полностью определяется R15 и C14 (обычно 47 нФ). Длительность пускового импульса и период повторения обратно пропорциональны наклону зуба пилы. Контакт 13 является импульсным выходом, и внешний ограничивающий резистор является обязательным. Максимальный ток 200 мА. Ограничитель тока (контакт 3) Безопасная работа двигателя и симистора при любых условиях обеспечивается ограничением пикового тока. Ток двигателя создает переменное напряжение на шунтирующем резисторе (0.05 на рисунке 4). Отрицательные полуволны передаются на вывод 3, который положительно настроен на напряжение, определяемое резисторами R3 и R4. По мере увеличения тока двигателя динамический диапазон напряжения на контакте 3 увеличивается, и когда контакт 3 становится немного отрицательным по отношению к контакту 8, в нем начинает циркулировать ток. Этот ток, обычно усиливаемый в 180 раз, затем используется для разряда конденсатора контакта 7 и, как следствие, уменьшает угол зажигания до значения, при котором достигается равновесие. Выбор резисторов R3, R4 и шунта определяет величину сигналов разрядного тока на выводе 7 C.Обратите внимание, что ограничитель тока действует только на пиковый ток симистора. Правила компоновки печатных схем. В обычных приложениях, где используется TDA 1085C, на одной плате присутствует высокое напряжение, высокие токи, а также сигналы низкого напряжения, где учитываются милливольты. В первую очередь важно отделить их друг от друга и соблюдать следующие правила: контакты развязки конденсатора, которые являются входами одного компаратора, должны быть физически близко к ИС, близко друг к другу и заземлены в одной точке. .Заземление тахогенератора должно быть напрямую подключено к контакту 8 и должно заземлять только тахогенератор. Фактически, последний является генератором шума первой величины из-за его близости к двигателю, который индуцирует высокие сигналы dφ / dt. Схема заземления должна быть звездообразной, чтобы полностью исключить токи мощности, протекающие в сети заземления, предназначенной для конденсаторов, разъединяющих чувствительные выводы: 4, 5, 7, 11, 12, 14, 16. ПРИМЕЧАНИЯ ПО ПРИМЕНЕНИЮ (см. Рисунок 4) В качестве примера на рисунке 5 представлена схема печатной платы, которая относится к группе чувствительных выводов и связанных с ними конденсаторов, в которые вставлен a.м. правила были реализованы. Обратите внимание на полное отделение Сигнального Мира от Власти, по одной линии AB и их связь с помощью уникальной полосы. Эти правила приведут к удовлетворительному объемному производству в том смысле, что регулировка скорости останется действительной во всем диапазоне скоростей. Источник питания Поскольку понижающий резистор рассеивает заметную мощность, необходимо снизить потребность в I CC до минимума. Запускающие импульсы, если определенное количество повторений сохраняется в резерве, чтобы справиться с износом моторной щетки в конце срока ее службы, являются крупнейшим пользователем I CC.При выборе понижающего резистора необходимо учитывать классическую конфигурацию наихудшего случая. Кроме того, параллельный стабилизатор должен всегда находиться в своем динамическом диапазоне, то есть I Pin 10 более 1,0 мА и Pin 10 более 3,0 в любой экстремальной конфигурации. Ячейка двойной фильтрации является обязательной. 5
6 Цепь тахогенератора Напряжение тахогенератора пропорционально скорости двигателя.Кроме того, для обеспечения устойчивости требуется RC-фильтр, полюс которого необходимо проверять. Комбинация обоих элементов дает сигнал постоянной амплитуды на выводе 12 в большей части диапазона скоростей. Рекомендуется проверять, чтобы эта максимальная амплитуда находилась в пределах 1,0 пика, чтобы иметь наибольшее отношение сигнал / шум без сброса интегральной схемы (что происходит, если на контакте 12 достигает 5,5). Также необходимо убедиться, что сигнал на контакте 12 примерно сбалансирован между высоким (более 300 м) и низким.8-полюсный тахометр — минимум для устойчивости на низких скоростях, а 16-полюсный — даже лучше. Полюс RC тахогенератора должен быть выбран в пределах 30 Гц, чтобы быть как можно дальше от 150 Гц, что соответствует третьей гармонике линии переменного тока, генерируемой двигателем во время процедуры запуска. Кроме того, резистор высокого номинала, идущий от CC, вводит положительное смещение на выводе 12, устраняет шум, который интерпретируется как сигнал тахометра. Это смещение должно быть рассчитано таким образом, чтобы контакт 12 достигал не менее 200 м (отрицательное напряжение) при самой низкой скорости двигателя.Мы помним о необходимости индивидуального заземления тахометра. Преобразователь частоты F / CC Контакт 11 имеет рекомендуемое значение 820 пФ для 8-полюсного тахометра и максимальной скорости вращения двигателя 15000, а контакт 11 R должен всегда иметь значение 470 К. R Контакт 4 должен быть выбран таким образом, чтобы подавать в пределах 12 при максимальной скорости двигателя. для максимального увеличения отношения сигнал / шум. Поскольку соотношение F / C, а также значение C Pin 11 являются рассредоточенными, R Pin 4 должен быть регулируемым и должен состоять из постоянного резистора, работающего с подстроечным резистором, составляющим 25% от общего числа.Регулировка стала бы проще. После настройки, например, при максимальной скорости двигателя, F / C представляет остаточную нелинейность; коэффициент преобразования (м на об / мин) увеличивается в пределах 7,7%, когда скорость приближается к нулю. Гарантированная дисперсия последнего очень узкая, максимальная погрешность скорости 1% гарантируется, если во время проектирования сети с выводом 5 небольшие заданные значения изменяются один раз навсегда в соответствии с этим увеличением. Следующие формулы дают вывод 4: Вывод 4 G.0 (CC a) C Вывод 11 R 4 f (1120k G.0. (CC a) 140 a = 2.0 BE 120 k = R int, на выводе 11 1 В вольтах. R Вывод 11) Набор скорости (вывод 5) По выбору разработчика набор внешних резисторов применяет серию различных напряжений, соответствующих различным скоростям двигателя. При переключении внешних резисторов убедитесь, что на контакт 5 не подается напряжение ниже 80 м. Если это так, произойдет полный сброс цепи. Генератор рампы (контакт 6) Если требуется только высокая рампа ускорения, подключите контакт 6 к земле. Когда должно произойти линейное изменение распределения, предварительно установите напряжение на выводе 6, которое соответствует начальной точке линейного изменения скорости двигателя.Распределение (или низкая рампа) будет продолжаться до того момента, пока скорость двигателя не достигнет двойного начального значения. Отношение два установлено IC. Тем не менее, он может быть изменен внешне вниз (Рисунок 6) или вверх (Рисунок 7). Рампа распределения может быть сокращена с помощью внешнего резистора от вывода 7 C зарядки CC, добавляя его ток к внутреннему генератору 5,0 А. Силовые цепи. Амплитуда импульса запуска симистора должна определяться резистором на выводе 13 в соответствии с требованиями в квадранте I.Длительность пускового импульса может быть нарушена шумовыми сигналами, генерируемыми самим симистором, которые мешают контактам 14 и 16, а именно тем, которые его определяют. Хотя этот эффект легко заметен, он безвреден. Симистор должен быть защищен от высокого напряжения сети переменного тока d / dt во время внешних помех сетью 100 нФ x 100. Шунтирующий резистор должен быть как можно более неиндуктивным. Это может быть сделано на месте, используя проволоку из константанового сплава. Когда нагрузка представляет собой универсальный двигатель постоянного тока через выпрямительный мост, симистор должен быть защищен от коммутации d / dt с помощью 1.Катушка от 0 до 2,0 мГн последовательно с MT 2. Функции синхронизации выполняются резисторами, определяющими проводимость линии переменного тока и симистора. Значения 820 k нормальны, но могут быть уменьшены до 330 k, чтобы с точностью обнаруживать нули и уменьшить остаточную составляющую линии постоянного тока ниже 20 мА. Ограничение тока Ограничитель тока начинает разряжать конденсатор контакта 7 (опорная скорость), когда ток двигателя достигает заданного порогового уровня. Коэффициент усиления контура определяется резистором, соединяющим вывод 3 с последовательным шунтом.Опыт показал, что его оптимальное значение для ограничения в 10 рук находится в пределах 2,0 k. Вход контакта 3 имеет чувствительность по току, которая ограничена разумными значениями и не должна реагировать на выбросы. Если не используется, контакт 3 должен быть подключен к максимальному положительному напряжению 5,0, а не оставаться открытым. Стабильность контура. Схема вывода 16 является преобладающей и должна быть отрегулирована экспериментально во время разработки модуля. Значения, указанные на рисунке 4, типичны для стиральных машин, но допускают большие изменения от одной модели к другой.R16 (единственное ограничение) не должно опускаться ниже 33 кОм, в противном случае ограничение скорости нарастания приведет к большим переходным ошибкам для шагов нагрузки. 6
7 Контакт 5 Контакт 4 Контакт 7 t 0 Рис. 2. Скорости линейного ускорения Контакт 5 фиксированное заданное значение Высокая скорость разгона DF DS Распределение высоких темпов ускорения Низкая линейная скорость 0 t Контакт 6 = DS DF = 2 DS Рисунок 3. Программируемая двойная линейная скорость ускорения 7
8 Резистивный сетевой тахогенератор с переключателем скорости / темпа μ 100 μ 1Н k Темп R k C11 R k R15 R10 R4 Скорость 820 pf 1.0 μ CC R k 47 k 68 k 1.0 μ C7 470 μ 1.0 μ 150 k 50 k TDA1085C 47 μ R16 68 k 16 C16 100n 14 C14 47n R3 2,7 k R2 820 k 120 M n 22 k 220n Шунт 50 мОм Ограничение тока: 10 A отрегулировано R4 экспериментально Рампы Высокое ускорение: 3200 об / мин в секунду Темп распределения: 10 с от 850 до 1300 об / мин Скорости: стирка 800 об / мин Распределение 1300 отжима 1: 7500 отжима 2: 15000 Pin 5 oltage Set: 609 m Включая поправки на нелинейность 996 м Включая поправки на нелинейность 5912 Включая поправки на нелинейность 12000 Точка настройки Диапазон скорости двигателя: от 0 до 15000 об / мин Тахогенератор 8-полюсный, обеспечивающий 30 от пика до пика при 6000 об / мин, в разомкнутой цепи Коэффициент F / C: 8 м на об / мин (12 полных скоростей) C Pin 11 = 680 пф СС = 15.3 Симистор MAX15A8 15 A 600 Igt мин. = 90 мА для покрытия Quad I при 10 ° C Рис. 4. Базовая прикладная схема 8
9 кНФ 47 нФ 470 кОм 820 пФ мкФ 470 мкФ CC B A MT2 MT1 + CC CC Заземление 0,22 мкФ Рис. 5. Компоновка печатной платы 9
10 Для k = 1.6, R 3 = 0,6 (R1 + R2), R 3 C в течение 4 секунд CC Spin 1 (определяется R5 / R4 + R5) Распределение и вращение 1 Контакт R3 R2 C R4 Контакт 5 2 Контакт Контакт 6 t Контакт 6 Контакт 6 0 Pin 6 t R1 R5 k <2 t Рисунок 6. Скорость распределения k <2 CC Spin 1 SD + S 1 Pin 6 2 Pin 6 t 2 Pin 6 Pin 5 0 Pin 6 Pin 6 t 0 k> 2 t Рисунок 7. Скорость распространения k> 2 10
11 CC I6 25 мкА 5,0 мкА МОНИТОРИНГ ЕСЛИ * I CC μa I2 ВКЛ. Для Ip2 = 0 I ma 0.7 Включение для Ip1 # 0 R1 = R2 R1 1,2 ма + I1 R2 0,7 I5 CC * (P12 подключен) и (CCOK) и (P5> 80 м) Затем (I1 OFF), (I2 OFF), (I4 OFF) и (I5 OFF) m + Рис. 8. Упрощенная схема 11
12 РАЗМЕРЫ УПАКОВКИ PDIP16 КОРПУС ПРОБЛЕМА T A B ПРИМЕЧАНИЯ: 1. РАЗМЕРЫ И ДОПУСКИ ДЛЯ ANSI Y14.5M, КОНТРОЛЬНЫЙ РАЗМЕР: ДЮЙМ. 3. РАЗМЕР L ДО ЦЕНТРА ПРОВОДОВ ПРИ ПАРАЛЛЕЛЬНОМ ОБРАЗОВАНИИ.4. РАЗМЕР B НЕ ВКЛЮЧАЕТ ВСПЫШКУ ФОРМЫ. 5. КРУГЛЫЕ УГЛЫ ДОПОЛНИТЕЛЬНО. H G F D 16 PL S C K 0,25 (0,010) M T ПЛОСКОСТЬ СИДЕНИЯ A M J L M ДЮЙМЫ МИЛЛИМЕТРЫ РАЗМЕР МИН МАКС МИН МАКС A B C D F G BSC 2,54 BSC H BSC 1,27 BSC J K L M S ON Semiconductor и являются зарегистрированными товарными знаками компании Semiconductor Components, LLC (SCILLC). SCILLC оставляет за собой право вносить изменения в любые продукты без предварительного уведомления. SCILLC не дает никаких гарантий, не делает никаких заявлений или гарантий относительно пригодности своих продуктов для какой-либо конкретной цели, а также SCILLC не принимает на себя никакой ответственности, возникающей в связи с применением или использованием любого продукта или схемы, и, в частности, отказывается от любой ответственности, включая, помимо прочего, специальные , косвенный или случайный ущерб.Типичные параметры, которые могут быть предоставлены в таблицах данных и / или спецификациях SCILLC, могут изменяться и действительно меняются в разных приложениях, а фактическая производительность может меняться со временем. Все рабочие параметры, включая типовые, должны проверяться техническими экспертами для каждого приложения клиента. SCILLC не передает никаких лицензий в соответствии со своими патентными правами или правами других лиц. Продукты SCILLC не разработаны, не предназначены и не разрешены для использования в качестве компонентов в системах, предназначенных для хирургической имплантации в тело, или других приложениях, предназначенных для поддержки или поддержания жизни, или для любого другого приложения, в котором отказ продукта SCILLC может создать ситуация, при которой возможны травмы или смерть.Если Покупатель приобретает или использует продукты SCILLC для любого такого непреднамеренного или несанкционированного применения, Покупатель должен освободить SCILLC и его должностных лиц, сотрудников, дочерние компании, филиалы и дистрибьюторов от всех претензий, затрат, убытков и расходов, а также разумных гонораров адвокатам из-за, прямо или косвенно, любого иска о травмах или смерти, связанных с таким непреднамеренным или несанкционированным использованием, даже если в таком иске утверждается, что SCILLC проявил небрежность в отношении конструкции или производства детали.SCILLC — работодатель, предоставляющий равные возможности / позитивные действия. На эту литературу распространяются все применимые законы об авторском праве, и она не подлежит перепродаже. ЗАКАЗ ПУБЛИКАЦИИ ИНФОРМАЦИОННАЯ ЛИТЕРАТУРА ИСПОЛНЕНИЕ: Центр распространения литературы для ON Semiconductor P.O. Box 5163, Денвер, Колорадо, США Телефон: или бесплатный звонок в США / Канаде, факс: или бесплатный звонок в США / Канаде, Сев. Техническая поддержка в США: бесплатный звонок в США / Канаде, Европа, Ближний Восток и Африка: Телефон: Телефон центра поддержки клиентов в Японии : ON Semiconductor Веб-сайт: Заказ литературы: За дополнительной информацией обращайтесь к местному торговому представителю TDA1085C / D
Регулятор скорости мотора стиральной машины.TDA1085C —
YouTube
Этот регулятор скорости может удерживать очень стабильные обороты путем считывания показаний тахогенератора. Все запросы на [email protected] Вот схемы и вся информация об этом контроллере http://zisoft.de/elektronik/drehzahlregelung
Взаимодействие с другими людьмиЕсли вы не понимаете, что электричество опасно, не трогайте его! Изолируйте от источника питания, обратитесь к электрику.Как подключить стиральную машину universala
YouTube
В этом видео я покажу вам, как я переделал этот старый генератор переменного тока в двигатель для своего электрического картинга. Единственная причина, по которой я выбрал этот генератор, — это потому, что
YouTube
Reguliatorius / kontroleris palaiko stabilias apsukas su tachogeneratoriaus pagalba. Схема лабаи папраста. Будь клайду суринкус, вейкия — это карто.Kontroleris surin
YouTube
Прелюдия к моей паяльной станции. Контроллер переменного напряжения. Будьте очень осторожны при построении этой схемы, это опасно. Я использую TRIAC — TIC2060 и
.YouTube
Мой Патреон: https://www.patreon.com/TPAI Ссылка Paypal-Donation внизу этого сайта: https://www.youtube.com/channel/UCDbWmfrwmzn1ZsGgrYRUxoA/about Paypa
YouTube
Если это видео вам поможет, «купите Майку пива» через [email protected] Этот видеоролик является первым из серии крупной бытовой техники DIY
.YouTube
просто модификация 42 слота 56 полюсов двигателя Direct Drive для бессенсорной версии BLDC
YouTube
Сделайте 12 В 60 А постоянного тока от 220 В переменного тока для сильноточного двигателя постоянного тока или двигателей мощностью до 1000 Вт — удивительная идея источника питания. Пиковый ток — 140A #dcmotor #amazing #idea # 12v #hig
YouTube
Пылесос, барабан не вращается, код неисправности E08 на модели WMh248DF, тахографическая проверка, замена щеток двигателя, краткое руководство.кисти. Многие двигатели стиральных машин похожи, например, Can
YouTube
Наконец, простая схема для управления направлением двигателя постоянного тока. Эта схема требует 6 компонентов. Я обновил базу описания на основе предложений от Фрэнки
YouTube
Невероятно, как запустить двигатель стиральной машины от батареи https://youtu.be/TcMUTqSvOsw Этот тип двигателя известен как универсальный двигатель, поэтому мы можем предположить, что это
YouTube
Последовательно подключенный универсальный двигатель может иметь превышение скорости при работе без нагрузки.В этом отличие от двигателя с параллельно подключенным полем
.YouTube
Учебник: http://www.how-to-repair.com/help/how-a-washing-machine-door-lock-or-interlock-works/ Замки дверей стиральных машин действительно имеют только 3 основных неисправности
YouTube
1-е место: 5 долларов США за 10 печатных плат с PCBWay: https://www.pcbway.com 2-й, новый участник первым заказывает 10 печатных плат бесплатно через PCBWay: https: // www.pcbway.com 3-й, Бесплатная доставка за
YouTube
Бесщеточный двигатель постоянного тока 220 В от стиральной машины до 600 Вт DIY — Salvage Outrunner BLDC Motor (Trash to Treasure) КУПИТЬ Двигатели генераторов: https://tinyurl.com/motor-
YouTube
Как сделать схему управления скоростью мотора стиральной машины с помощью простого регулятор напряжения или регулятор скорости двигателя стиральной машины с диммером https: // youtu.be / o
YouTube
Генератором может быть любой двигатель в обратном направлении. Электропроводка двигателя стиральной машины-генератора — это способ подключения двигателя стиральной машины к генератору. Существует много типов
.YouTube
Электродвигатель стиральной машины на 220 В переменного тока и регулировка скорости Как подключить мотор стиральной машины к сети переменного тока 220в https://www.youtube.com/watch?v=lRj6V7ygBQo и как повторно подключить
YouTube
Это видео самодельного мотор-тестера для стиральных машин Whirlpool покажет вам, как правильно проверить и отремонтировать самодельный мотор-тестер для стиральных машин Whirlpool.Для более
YouTube
Я покажу, как подключить несколько различных типов двигателей, и объясню некоторые важные компоненты. 1. Однофазный асинхронный двигатель нагнетателя 1/4 (бесщеточный), индукционный mo
YouTube
TDA1085C (Motorola) — УНИВЕРСАЛЬНЫЙ КОНТРОЛЛЕР СКОРОСТИ ДВИГАТЕЛЯ
www.docs.chipfind.ruУстройство
Эксплуатация
Диапазон температур
Упаковка
TDA1085C
ПОЛУПРОВОДНИК
ТЕХНИЧЕСКИЕ ХАРАКТЕРИСТИКИ
УНИВЕРСАЛЬНЫЙ ДВИГАТЕЛЬ
РЕГУЛЯТОР СКОРОСТИ
ИНФОРМАЦИЯ ДЛЯ ЗАКАЗА
TDA1085CD
TDA1085C
ТДж = 10
Сна +120
С
SO16
Пластиковый DIP
Закажите этот документ по TDA1085C / D
УПАКОВКА ИЗ ПЛАСТИКА
КОРПУС 648
D СУФФИКС
УПАКОВКА ИЗ ПЛАСТИКА
КОРПУС 751B
(SO16)
16
1
16
1
1
ДАННЫЕ АНАЛОГОВОГО УСТРОЙСТВА MOTOROLA
Универсальный двигатель
Регулятор скорости
TDA1085C — симисторный регулятор угла сдвига фаз, имеющий все необходимые
функции универсального управления скоростью двигателя в стиральных машинах.Он работает с
в конфигурации с замкнутым контуром и предоставляет две возможности линейного изменения скорости.
Преобразователь частоты в напряжение OnChip
Генератор рамп OnChip
SoftStart
Ограничение тока нагрузки
Обнаружение цепи тахогенератора
Прямое питание от сети переменного тока
Функции безопасности, выполняемые монитором
Рис. 1. Типовая блок-схема и штыревые соединения
Сброс
Контроль
усилитель.
=
VCC
Текущий
Ограничитель
0,7 В
+
Пандус
Генератор
Скорость
Детектор
Шунтирующий регулятор
Балластный резистор
+ VCC
Мониторинг
Напряжение
Reg
Цифровой датчик скорости
Конденсатор насоса F / VC
Фактическая скорость
Установить скорость
Управление генератором линейного тока
Ограничение тока двигателя
Ramp Gen.
т
iming
Устойчивость в замкнутом контуре
Конденсатор с зубьями
Пила установленный ток
В
Синхронизация старения
Синхронизация тока
т
Риггер Импульсный выход
Импульс запуска
Поколение
9
10
8
12
11
4
5
6
3
7
16
14
15
2
1
13
Motorola, Inc.1996
Ред. 5
TDA1085C
2
ДАННЫЕ АНАЛОГОВОГО УСТРОЙСТВА MOTOROLA
МАКСИМАЛЬНЫЕ РЕЙТИНГИ
(TA = 25
C, напряжения относятся к контакту 8, земля)
Рейтинг
Символ
Значение
Блок
Источник питания с внешней регулировкой, ВПин 9
VCC
15
В
Максимальное напряжение на указанный вывод
Штифт 3
Штифт 4567131416
Штифт 10
ВПин
+ 5.0
от 0 до + VCC
0 до + 17
В
Максимальный ток на указанный вывод
Контакт 1 и 2
Контакт 3
Контакт 9 (VCC)
Контакт 10 шунтирующий регулятор
Контакт 12
Контакт 13
IPin
от 3,0 до + 3,0
1,0 до + 0
15
35
от 1,0 до + 1,0
200
мА
Максимальное рассеивание мощности
PD
1,0
Вт
Термическое сопротивление, соединение с воздухом
R
JA
65
с / ш
Рабочая температура перехода
ТДж
10 до + 120
С
Диапазон температур хранения
Тстг
55 до + 150
С
ЭЛЕКТРИЧЕСКИЕ ХАРАКТЕРИСТИКИ
(TA = 25
С)
Характеристика
Символ
мин.
Тип
Макс
Блок
РЕГУЛЯТОР НАПРЯЖЕНИЯ
Напряжение с внутренней регулировкой (VPin 9)
(IPin 7 = 0, IPin 9 + IPin 10 = 15 мА, IPin 13 = 0)
VCC
15
15.3
15,6
В
Температурный коэффициент VCC
TF
–
100
–
частей на миллион /
С
Потребление тока (IPin 9)
(V9 = 15 В, V12 = V8 = 0, I1 = I2 = 100
А,
все остальные контакты не подключены)
ICC
–
4,5
6.0
мА
Уровень включения мониторинга VCC
Мониторинг VCC
Уровень отключения
VCC EN
VCC DIS
–
–
VCC 0.4
VCC 1.0
–
–
В
ГЕНЕРАТОР РАМПЫ
Ссылка Скорость Диапазон входного напряжения
ВПин 5
0,08
–
13,5
В
Опорный входной ток смещения
IPin 5
0
0,8
1,0
А
Выбор рампы Входной ток смещения
IPin 6
0
–
1,0
А
Диапазон начального уровня распределения
VDS
0
–
2.0
В
Раздача Конечный уровень
VPin 6 = 0,75 В
VDF / VDS
2,0
2,09
2,2
Высокий ток ускоренной зарядки
VPin 7 = 0 В
VPin 7 = 10 В
IPin 7
1,0
1,0
–
1,2
1,7
1,4
мА
Распределительный ток заряда
VPin 7 = 2,0 В
IPin 7
4.0
5,0
6.0
А
TDA1085C
3
ДАННЫЕ АНАЛОГОВОГО УСТРОЙСТВА MOTOROLA
ЭЛЕКТРИЧЕСКИЕ ХАРАКТЕРИСТИКИ
(продолжение)
Характеристика
Символ
мин.
Тип
Макс
Блок
ОГРАНИЧИТЕЛЬ ТОКА
Ограничитель усиления по току — IPin 7 / IPin 3
(IPin3 = 300
А)
кг
130
180
250
Пороговое напряжение обнаружения
IPin 3 = 10
А
ВПин 3 ТН
50
65
80
мВ
ПРЕОБРАЗОВАТЕЛЬ ЧАСТОТЫ НАПРЯЖЕНИЯ
Входной сигнал «Низкое напряжение»
Входной сигнал «Высокое напряжение»
Контроль сброса напряжения
V12 L
V12 H
V12 R
100
+100
5.0
–
–
–
–
–
–
мВ
мВ
В
Отрицательное напряжение зажима
IPin 12 = 200
А
V12 класс
–
0,6
–
В
Входной ток смещения
IPin12
–
25
–
А
Коэффициент усиления внутреннего источника тока
G
+
Я
Контакт 4
Я
Контакт 11
, В
Контакт 4
+
В
Контакт 11
+
0
г.0
9,5
–
11
Линейность усиления в зависимости от напряжения на выводе 4
(G8.6 = усиление для VPin 4 = 8,6 В)
V4 = 0 В
V4 = 4,3 В
V4 = 12 В
G / G8.6
1,04
1,015
0,965
1,05
1,025
0,975
1,06
1,035
0,985
Влияние температуры усиления (VPin 4 = 0)
TF
–
350
–
частей на миллион /
С
Выходной ток утечки (IPin 11 = 0)
IPin 4
0
–
100
нА
УСИЛИТЕЛЬ УПРАВЛЕНИЯ
Диапазон входного напряжения фактической скорости
ВПин 4
0
–
13.5
В
Входное напряжение смещения VPin 5 VPin 4
(IPin 16 = 0, VPin 16 = 3,0 и 8,0 В)
Voff
0
–
50
мВ
Крутизна усилителя
(IPin 16/
(V5 V4)
(IPin 16 = + и 50
А, VPin 16 = 3,0 В)
т
270
340
400
A / V
Возможность качания выходного тока
Источник
Раковина
IPin 16
200
50
100
100
50
200
А
Выходное напряжение насыщения
V16 сб
–
–
0.8
В
ГЕНЕРАТОР ТРИГГЕРНЫХ ИМПУЛЬСОВ
Токи уровня синхронизации
Измерение линии напряжения
Измерение симистора
IPin 2
IPin 1
–
–
50
50
100
100
А
Длительность импульса запуска (CPin 14 = 47 нФ, RPin 15 = 270 кОм
)
ТП
–
55
–
с
Период повторения запускающего импульса, условия как a.м.
TR
–
220
–
с
Выходной импульсный ток VPin 13 = VCC 4,0 В
IPin 13
180
192
–
мА
Выходной ток утечки VPin 13 = 3,0 В
I13 L
–
–
30
А
Входное напряжение с полной угловой проводимостью
V14
–
11,7
–
В
Зуб пилы «Высокий» уровень напряжения
V14 H
12
–
12.7
В
Ток разряда зубьев пилы, IPin15 = 100
А
IPin 14
95
–
105
А
TDA1085C
4
ДАННЫЕ АНАЛОГОВОГО УСТРОЙСТВА MOTOROLA
ОБЩЕЕ ОПИСАНИЕ
TDA 1085C запускает симистор в соответствии с требованиями регулирования скорости
. Скорость двигателя в цифровом виде измеряется тахогенератором
и затем преобразуется в аналоговое напряжение.
Установленная скорость фиксируется извне и применяется к входу внутреннего линейного регулирования
после подачи на программируемые линейные изменения ускорения
. Общий результат — полная частота вращения двигателя
с двумя рампами ускорения, которые позволяют эффективно управлять стиральной машиной
(функция распределения).
Кроме того, TDA 1085C защищает всю систему от отключения или отклонений линии AC
, перегрузки по току в двигателе и отказа тахогенератора
.
ФУНКЦИИ ВХОДА / ВЫХОДА
(см. Рисунки 1 и 8)
Регулятор напряжения (контакты 9 и 10) Это стабилизатор
параллельного типа, способный отводить большой ток и предлагающий хорошие характеристики
. Протекание тока обеспечивается от линии переменного тока внешними падающими резисторами
R1, R2 и выпрямителем: этот полуволновой ток
используется для питания сглаживающего конденсатора, напряжение на котором
проверяется IC.
Когда достигается VCC, превышение тока обеспечивается другим понижающим резистором R10
и выводом 10. Эти три резистора должны быть
определены в следующем порядке:
Чтобы пропускать ток 1,0 мА через контакт 10, когда линия переменного тока минимальна, а потребление VCC
является максимальным (присутствуют быстрые линейные изменения и импульсы).
Чтобы V10 достиг 3,0 В, когда линия переменного тока обеспечивает максимальный ток, а потребление
В постоянного тока является минимальным (без линейных изменений и без импульсов).
На протяжении всего цикла основной линии динамический диапазон контакта 10 не должен превышаться на
, кроме случаев потери регулирования.
Отказ сетевого питания переменного тока может вызвать отключение.
Двойной емкостный фильтр на основе R1 и R2 обеспечивает эффективное сглаживание
VCC и помогает удалить шум на заданных скоростях.
Датчик скорости (контакты 4, 11, 12) ИС совместима с внешним аналоговым датчиком скорости
: его выход должен быть подан на контакт 4,
и контакт 12, подключенный к контакту 8.
В большинстве приложений более удобно использовать цифровой датчик скорости
с недорогим тахогенератором, который
не поддерживает
т нужен какой-то тюнинг.Во время каждого положительного цикла на выводе 12,
конденсатор CPin 11 заряжается почти до VCC, и в течение этого времени
контакт 4 подает ток, который в 10 раз превышает ток заряда
CPin 11. Коэффициент усиления источника тока называется G и строго указан
, но, тем не менее, требует регулировки. на RPin 4. Ток
в этом резисторе пропорционален CPin 11 и скорости двигателя
; будучи отфильтрованным конденсатором, VPin 4 затухает
и представляет «истинную фактическую скорость двигателя».
Для поддержания линейности в диапазоне высоких скоростей важно проверить
, что CPin 11 полностью заряжен: внутренний источник на контакте 11 имеет 100 Кбайт
импеданс. Тем не менее, CPin 11 должен быть как можно более высоким, поскольку он
имеет большое влияние на температурный фактор FV / C. А 470 К
резистор
между контактами 11 и 9 снижает токи утечки и температурный коэффициент
, вплоть до незначительных эффектов.
Вывод 12 также имеет функцию контроля: когда его напряжение выше
5.0 В, триггерные импульсы запрещены, и ИС сбрасывается. Он также
определяет непрерывность тахогенератора, и в случае любой апертуры цепи
он подавляет импульс, предотвращая выход двигателя из-под контроля. В
TDA 1085C, контакт 12 отрицательно зажат внутренним диодом
, что устраняет необходимость во внешнем диоде, используемом в прежней схеме
.
Генератор рампы (выводы 5, 6, 7) Истинное значение установленной скорости, принимаемое при учете
при регулировании, является выходным сигналом генератора рампы
(вывод 7).При заданном значении входной уставки скорости (вывод 5) генератор линейного изменения
заряжает внешний конденсатор CPin 7 до момента, когда
VPin 5 (заданная скорость) равняется VPin 4 (истинная скорость), см. Рисунок 2. IC
имеет внутренний источник зарядного тока 1,2 мА, который подает его от
0 до 12 В на выводе 7. Это высокая линейная характеристика ускорения (обычно 5,0 с), которая позволяет
быстро изменять скорость двигателя без чрезмерных нагрузок на механику
. Кроме того, TDA 1085C предлагает возможность прервать
это высокое ускорение с введением кривой низкого ускорения
(называемой распределением), уменьшив ток источника на выводе 7 до
5.0
A при полном управлении контактом 6, как показано при следующих условиях:
Наличие высокой рампы ускорения VPin 5> VPin 4
Распределение происходит в диапазоне VPin 4 (истинная скорость двигателя), определяемом параметром
VPin 6
х
ВПин 4
х
2,0 ВПин 6
Для двух фиксированных значений VPin 5 и VPin 6 скорость двигателя будет иметь высокое ускорение
, за исключением времени, за которое VPin 4 перейдет от VPin 6
к удвоенному значению, снова высокое ускорение, до момента
двигателя. достиг заданного значения скорости, на котором он будет оставаться,
, см. рисунок 3.
Если произойдет сброс (какой бы ни была причина), упомянутые выше
последовательные изменения скорости будут полностью повторно обработаны от 0 до максимальной скорости
. Если VPin 6 = 0, возникает только высокая скорость разгона
.
Чтобы получить реальное положение нулевой скорости, вывод 5 был разработан таким образом, что его напряжение от 0 до 80 мВ интерпретируется как истинный ноль. Как следствие
, при изменении заданного положения скорости разработчик
должен быть уверен, что никакого переходного нуля не произойдет: в случае его возникновения вся схема
будет сброшена.
Поскольку напряжения, подаваемые на контакты 5 и 6, поступают от внутреннего источника питания регулятора напряжения
, а напряжение на контакте 4 также поступает от того же источника
, скорость двигателя (которая определяется соотношением
между упомянутыми выше напряжениями) полностью независима. от вариаций VCC
и температурного фактора.
Управляющий усилитель (вывод 16) Он усиливает разницу между истинной скоростью
(вывод 4) и заданной скоростью (вывод 5) через генератор рампы.Его выход
, доступный на выводе 16, представляет собой источник тока с двойным считыванием с максимальной пропускной способностью
100
А и заданная крутизна
(340
A / V типично). Контакт 16 напрямую управляет генератором триггерных импульсов,
и должен быть нагружен электрической сетью, которая компенсирует механические характеристики
двигателя и его нагрузку, чтобы
обеспечивал стабильность в любых условиях и кратчайшие переходные характеристики; см.
Рисунок 4.
Эту сеть нужно настроить экспериментально.
В случае периодических изменений крутящего момента контакт 16 напрямую обеспечивает колебания угла фазы
.
TDA1085C
5
ДАННЫЕ АНАЛОГОВОГО УСТРОЙСТВА MOTOROLA
Генератор пусковых импульсов (выводы 1, 2, 5, 13, 14, 15)
Эта схема выполняет четыре функции:
Преобразование выходного уровня постоянного тока управляющего усилителя в пропорциональный угол включения
на каждом полупериоде основной линии.
Калибровка длительности импульса.
Повторение импульса, если симистор не срабатывает, если ток
был прерван из-за отскока щетки.
Задержка пускового импульса до тех пор, пока ток не пересечет ноль при широких углах зажигания
и индуктивных нагрузках.
RPin 15 программирует ток разряда контакта 14. Сигнал зуба пилы составляет
, тогда полностью определяется R15 и C14 (обычно 47 нФ). Длительность пускового импульса
и период повторения обратно пропорциональны крутизне зубца
пилы.
Вывод 13 является импульсным выходом, а внешний ограничивающий резистор
является обязательным. Максимальный ток 200 мА.
Ограничитель тока (вывод 3) Безопасная работа двигателя и симистора при всех условиях
обеспечивается ограничением пикового тока. Ток двигателя
создает на шунтирующем резисторе переменное напряжение (0,05
на рисунке 4). Отрицательные полуволны передаются на вывод 3, на котором
положительно задано напряжение, определяемое резисторами R3 и R4.
По мере увеличения тока двигателя динамический диапазон напряжения на контакте 3
увеличивается, и когда контакт 3 становится немного отрицательным по сравнению с контактом 8
, в нем начинает циркулировать ток. Этот ток, усиленный
обычно в 180 раз, затем используется для разряда конденсатора контакта 7 и, как результат
, уменьшает угол зажигания до значения, при котором достигается равновесие
. Выбор резисторов R3, R4 и шунта определяет величину
сигналов тока разряда на CPin 7.
Обратите внимание, что ограничитель тока действует только на пиковый ток симистора.
ПРИМЕЧАНИЯ ПО ПРИМЕНЕНИЮ
(см. Рисунок 4)
Правила компоновки печатных схем
В обычных приложениях, где используется TDA 1085C, на
есть такая же плата, наличие высокого напряжения, больших токов, а также
сигналов низкого напряжения, где учитываются милливольты. Первой величиной
является отделение их друг от друга и соблюдение следующих правил
:
Выводы развязки конденсатора, которые являются входами того же компаратора
, должны быть физически близко к ИС, близко друг к другу
и заземлены в одной точке.
Заземление тахогенератора должно быть напрямую подключено
к контакту 8 и должно заземлять только тахогенератор. Фактически, последний является генератором шума первой величины
из-за его близости к двигателю
, который вызывает высокий d
/ dt сигналов.
Схема заземления должна быть «звездообразной», чтобы полностью исключить
силовые токи, протекающие в сети заземления, выделенной на конденсаторы
, развязывающие чувствительные выводы: 4, 5, 7, 11, 12, 14, 16.
В качестве примера на фиг. 5 представлена схема печатной платы
, относящаяся к группе чувствительных выводов и связанных с ними конденсаторов
, в которых реализованы правила AM. Обратите внимание на полное разделение
«Мира сигналов» от «Власти», по одной строке AB и их связи
с помощью уникальной полосы.
Эти правила приведут к удовлетворительному объемному производству в смысле
, в том смысле, что регулировка скорости останется действительной во всем диапазоне скоростей
.
Источник питания
Поскольку понижающий резистор рассеивает заметную мощность, необходимо
уменьшить потребность в ICC до минимума.Запускающие импульсы, если определенное количество повторений
сохранено в резерве, чтобы справиться с износом щетки мотора
в конце его срока службы, являются крупнейшим пользователем ICC. Классическая конфигурация
наихудшего случая должна быть рассмотрена для выбора падающего резистора
. Кроме того, параллельный стабилизатор должен всегда находиться в своем динамическом диапазоне
, то есть IPin 10 более 1,0 мА и VPin 10 более 3,0 В в любой экстремальной конфигурации
. Ячейка двойной фильтрации является обязательной.
Цепь тахогенератора
Напряжение сигнала тахогенератора пропорционально скорости двигателя.Для обеспечения стабильности
, кроме того, требуется RC-фильтр, полюс которого
должен быть обращен на него. Комбинация обоих элементов дает сигнал с постоянной амплитудой
на выводе 12 в большей части диапазона скоростей.
рекомендуется проверить, чтобы эта максимальная амплитуда находилась в пределах 1,0 В пикового значения
, чтобы иметь наибольшее отношение сигнал / шум без сброса
интегральная схема (что происходит, если VPin 12 достигает 5,5 В). Также необходимо проверить
, что сигнал на выводе 12 примерно сбалансирован
между «высоким» (более 300 мВ) и «низким».8-полюсный тахометр — это минимум
для устойчивости на низких скоростях, а 16-полюсный — даже лучше.
Полюс RC тахогенератора должен быть выбран в пределах 30 Гц в
, чтобы быть как можно дальше от 150 Гц, что соответствует
третьей гармонике линии переменного тока, генерируемой двигателем во время процедуры запуска
. Кроме того, резистор высокого номинала, поступающий от VCC
, вводит положительное смещение на выводе 12, удаляет шум, который интерпретируется
как сигнал тахометра. Это смещение должно быть спроектировано таким образом, чтобы контакт 12
достигал не менее 200 мВ (отрицательное напряжение) при самой низкой скорости двигателя.
Мы помним о необходимости индивидуального подключения заземления тахометра
.
Преобразователь частоты в напряжение F V / C
CPin 11 имеет рекомендуемое значение 820 пФ для 8-полюсного тахометра и
максимальной скорости вращения двигателя 15000, а RPin 11 всегда должно быть 470 K.
RPin 4 следует выбирать для подачи в пределах 12 В при максимальной скорости двигателя
, чтобы обеспечить максимальное отношение сигнал / шум. Поскольку отношение FV / C, как
, так и значение CPin 11, рассредоточено, RPin 4 должен быть регулируемым, а
должен состоять из постоянного резистора в серии с подстроечным резистором
, составляющим 25% от общего числа.Регулировка стала бы проще.
После настройки, например, на максимальную скорость двигателя, FV / C
представляет остаточную нелинейность; коэффициент преобразования (мВ на об / мин)
увеличивается в пределах 7,7%, когда скорость приближается к нулю. Гарантированная дисперсия
последнего очень узкая, максимальная погрешность
скорости 1% гарантируется, если во время проектирования сети с выводом 5 малый набор значений
изменен один раз навсегда в соответствии с этим увеличением.
Следующие формулы дают VPin 4:
В
Контакт 4
+
г.0
@
(В
CC
Ва)
@
С
Контакт 11
@
R
4
@
f
@
(1
)
120 тыс.
R
Pin11
)
1
В вольтах.
G.0. (VCC Va)
‘
140
Va = 2.0 VBE
120 k = Rint, на выводе 11
Набор скорости
(вывод 5) По выбору разработчика набор внешних
Резисторы применяют серию различных напряжений, соответствующих разным скоростям двигателя
.При переключении внешних резисторов убедитесь, что
никогда не подавал напряжение ниже 80 мВ на контакт 5. Если это так, произойдет полный сброс цепи
.
TDA1085C
6
ДАННЫЕ АНАЛОГОВОГО УСТРОЙСТВА MOTOROLA
Генератор рампы (вывод 6) Если требуется только высокая рампа ускорения
, подключите вывод 6 к земле.
Когда должно произойти линейное изменение распределения, предварительно установите напряжение на выводе 6
, которое соответствует начальной точке линейного изменения скорости двигателя.
Распределение (или низкая рампа) будет продолжаться до того момента, пока скорость двигателя
не достигнет двойного пускового значения.
Соотношение двух определяется IC. Тем не менее, это может быть
, внешне измененный вниз (Рисунок 6) или вверх (Рисунок 7).
Линия распределения может быть сокращена с помощью внешнего резистора от
VCC, заряжающего CPin 7, добавляя его ток к внутреннему 5.0
А
Генератор.
Силовые цепи
Симистор Амплитуда запускающего импульса должна определяться резистором Pin 13
в соответствии с требованиями квадранта IV.Длительность пускового импульса
может быть нарушена шумовыми сигналами, генерируемыми самим симистором, которые
мешают контактам 14 и 16, а именно тем, которые его определяют.
Хотя этот эффект легко заметен, он безвреден.
Симистор должен быть защищен от высокого напряжения переменного тока dV / dt во время внешних помех
100 нФ x 100
сеть.
Шунтирующий резистор должен быть как можно более неиндуктивным. Его можно изготавливать
локально, используя проволоку из константанового сплава.
Когда в качестве нагрузки используется универсальный двигатель постоянного тока через выпрямительный мост,
симистор должен быть защищен от коммутации dV / dt с помощью 1.0 до
Змеевик 2,0 мГн последовательно с MT2.
Функции синхронизации выполняются резисторами, считывающими линию переменного тока
и проводимость симистора. Значения 820 кОм являются нормальными, но их можно уменьшить с
до 330 кОм, чтобы обнаруживать «нули» с точностью
и уменьшить остаточную составляющую линии постоянного тока ниже 20 мА.
Ограничение тока
Ограничитель тока начинает разряжать конденсатор контакта 7 (опорная скорость
), когда ток двигателя достигает проектного порогового уровня.
Коэффициент усиления контура определяется резистором, соединяющим контакт 3 с шунтом серии
. Опыт показал, что его оптимальное значение для ограничения
на 10 рук находится в пределах 2,0 к
. Вход контакта 3 имеет чувствительность
, который ограничен разумными значениями и не должен реагировать на скачки
.
Если не используется, контакт 3 должен быть подключен к максимальному положительному напряжению
5,0 В, а не оставаться открытым.
Стабильность контура
Сеть контактов 16 является преобладающей и должна быть отрегулирована
экспериментально во время разработки модуля.Значения, указанные на рис. 4
, типичны для применения в стиральных машинах, но допускают значительные изменения
от одной модели к другой. R16 (единственное ограничение
) не должно опускаться ниже 33 кОм, в противном случае ограничение скорости нарастания
вызовет большие переходные ошибки для шагов нагрузки.
Рисунок 2. Линия ускорения
Рисунок 3. Программируемый двойной
Рампа разгона
В
ВПин 5
ВПин 7
т
0
VPin 6 = VDS
0
VDS
VDF
Высокое ускорение
Скорость
Распределение
Низкое ускорение
Пандус
Высокое ускорение
Пандус
VPin 5 фиксированное установленное значение
Скорости
т
ВПин 4
VDF = 2 VDS
TDA1085C
7
ДАННЫЕ АНАЛОГОВОГО УСТРОЙСТВА MOTOROLA
680
R7
1500
к
R1
1
470
к
R15
R10
R4
270
6.8
к
1N4007
R1
820
к
R2
820
к
120
100
100н
Шунт
50 м
R3
2,7
к
C14
47н
C16
100н
47
R16
68
к
150
к
50
к
220н
22
к
1.0
470
C7
1,0
68
к
47
к
1,0
Пандус
Скорость
Скорость / рампа
Селектор
резистивный
Сеть
T
Генератор acho
Рисунок 4. Базовая прикладная схема
Ограничение тока: 10
А
с поправкой на R4 экспериментально
Рампы Высокое ускорение: 3200 об / мин в секунду
Скорость распределения: 10 с от 850 до 1300 об / мин
Скорости:
Вт
зола 800 об / мин
Распределение 1300
Спин 1: 7500
Спин 2: 15,000
Контакт 5 В
старый
Набор:
609 мВ
996 мВ
5,912 В
12000 В
С поправками на нелинейность
С поправками на нелинейность
С поправками на нелинейность
Точка настройки
Диапазон скорости двигателя: от 0 до 15000 об / мин
т
Генератор 8 полюсов, выдающий 30 В от пика до пика при 6000 об / мин, в разомкнутой цепи
Коэффициент FV / C: 8 мВ на об / мин (полная скорость 12 В) C
Штифт
1
1
= 680 пФ
В
CC
= 15.3 В
т
riac
MAX15A8
15 А
600
В
Igt мин. = 90 мА
для покрытия Quad IV на 10
С
1
1
15
9
1
0
2
1
13
3
14
16
8
12
4
5
6
7
TDA1085C
+ V
CC
C1
1
820 пФ
100
100
м
TDA1085C
8
ДАННЫЕ АНАЛОГОВОГО УСТРОЙСТВА MOTOROLA
Рисунок 5.Компоновка печатной платы
270
к
120
100
нФ
47
нФ
470
к
820
пФ
16
15
14
13
12
11
10
9
1
2
3
4
5
6
7
8
1,0
Ф
В CC
А
В
MT2
MT1
470
Ф
+ VCC
В
CC
0.22
Ф
Заземление
TDA1085C
9
ДАННЫЕ АНАЛОГОВОГО УСТРОЙСТВА MOTOROLA
Контакт 6
VCC
С
R3
R2
R1
R5
R4
Раздать
и Spin 1
Контакт
В
2VPin 6t
ВПин 6т
т
к <2
Спин 1 (определяется R5 / R4 + R5)
0
0
ВПин 6
Для k = 1.6, R3 = 0,6 (R1 + R2),
R3 C в течение 4 секунд
2VPin 6
Контакт 5
Рисунок 6. Скорость распределения k <2
SD + S1
VCC
Контакт 6
к> 2
т
2VPin 6t
ВПин 6т
Спин 1
В
ВПин 6
2VPin 6
Контакт 5
0
0
Рисунок 7. Скорость распределения k> 2
TDA1085C
10
ДАННЫЕ АНАЛОГОВОГО УСТРОЙСТВА MOTOROLA
Рисунок 8.Упрощенная схема
3
4
1
1
12
10
8
9
13
15
14
1
2
16
6
7
5
0.7
В
Я
6
Я
7
Я
2
Я
1
0,7
В
«ПО»
для Ip2 = 0
Включить
для Ip1 # 0
R1 = R2
R1
R2
В
CC
1,2
мА
1,2
мА
5,7
В
25
А
5.0
А
0,6
В
5,0
А
+ V
CC
80
мВ
Я
5
+
+
+
МОНИТ
ЗАКАЗ
IF *
* (P12 подключен) и (V
CC
ОК) и (VP5> 80
мВ)
Затем
Я
1 ВЫК.),
(
Я
2 ВЫКЛ),
(
Я
4 ВЫКЛ) и
(
Я
5 ВЫКЛ)
(
Я
3
В
CC
0.7 В
TDA1085C
11
ДАННЫЕ АНАЛОГОВОГО УСТРОЙСТВА MOTOROLA
УПАКОВКА ИЗ ПЛАСТИКА
КОРПУС 64808
ВЫПУСК R
D СУФФИКС
УПАКОВКА ИЗ ПЛАСТИКА
КОРПУС 751B05
ВЫПУСК J
(SO16)
ГАБАРИТНЫЕ РАЗМЕРЫ
ПРИМЕЧАНИЯ:
1. РАЗМЕРЫ И ДОПУСКИ ПО ANSI
Y14.5M, 1982 г.
2.КОНТРОЛЬНЫЙ РАЗМЕР: ДЮЙМ.
3. РАЗМЕР L ДО ЦЕНТРА ПРОВОДОВ КОГДА
ФОРМИРОВАННАЯ ПАРАЛЛЕЛЬНАЯ.
4. РАЗМЕР B НЕ ВКЛЮЧАЕТ ВСПЫШКУ ФОРМЫ.
5. КРУГЛЫЕ УГЛЫ ДОПОЛНИТЕЛЬНО.
А
Б
Факс
К
S
H
г
Д
Дж
л
м
16 PL
СИДЕНЬЯ
1
8
9
16
К
САМОЛЕТ
т
м
А
м
0.25 (0,010)
т
РАЗМЕР
МИН.
МАКС
МИН.
МАКС
МИЛЛИМЕТРА
ДЮЙМА
А
0,740
0,770
18,80
19,55
Б
0,250
0,270
6,35
6,85
К
0.145
0,175
3,69
4,44
Д
0,015
0,021
0,39
0,53
Факс
0,040
0,70
1.02
1,77
г
0,100 BSC
2,54 BSC
H
0,050 BSC
1,27 BSC
Дж
0,008
0,015
0.21
0,38
К
0,110
0,130
2,80
3,30
л
0,295
0,305
7,50
7,74
м
0
10
0
10
S
0,020
0,040
0,51
1.01
_
_
_
_
ПРИМЕЧАНИЯ:
1.РАЗМЕРЫ И ДОПУСКИ ПО ANSI
Y14.5M, 1982 г.
2. КОНТРОЛЬНЫЙ РАЗМЕР: МИЛЛИМЕТР.
3. РАЗМЕРЫ A И B НЕ ВКЛЮЧАЮТ
ВЫДВИЖЕНИЕ ФОРМЫ.
4. МАКСИМАЛЬНОЕ ВЫСТУПЛЕНИЕ ФОРМЫ 0,15 (0,006)
НА СТОРОНУ.
5. РАЗМЕР D НЕ ВКЛЮЧАЕТ ДАМБАР
ВЫДВИЖЕНИЕ. ДОПУСТИМОЕ ВЫСТУПЛЕНИЕ DAMBAR
ДОЛЖНО БЫТЬ 0,127 (0,005) ИТОГО
, ПРЕВЫШАЕТ РАЗМЕР D ПРИ МАКСИМАЛЬНОМ СОСТОЯНИИ МАТЕРИАЛА
.
1
8
16
9
СИДЕНЬЯ
САМОЛЕТ
Факс
Дж
м
R
Х 45
_
г
8 PL
п.
Б
А
м
0.25 (0,010)
В
S
т
Д
К
К
16 PL
S
В
м
0,25 (0,010)
А
S
т
РАЗМЕР
МИН.
МАКС
МИН.
МАКС
ДЮЙМА
МИЛЛИМЕТРА
А
9.80
10,00
0,386
0,393
Б
3,80
4,00
0,150
0,157
К
1,35
1,75
0,054
0,068
Д
0,35
0,49
0,014
0,019
Факс
0,40
1,25
0,016
0,049
г
1.27 BSC
0,050 BSC
Дж
0,19
0,25
0,008
0,009
К
0,10
0,25
0,004
0,009
м
0
7
0
7
п.
5,80
6,20
0,229
0,244
R
0.25
0,50
0,010
0,019
_
_
_
_
TDA1085C
12
ДАННЫЕ АНАЛОГОВОГО УСТРОЙСТВА MOTOROLA
Motorola оставляет за собой право вносить изменения в любые продукты без предварительного уведомления. Motorola не дает никаких гарантий, не делает никаких заявлений или гарантий относительно
пригодности ее продуктов для какой-либо конкретной цели, а также Motorola не принимает на себя никакой ответственности, возникающей в связи с применением или использованием любого продукта или схемы, и
прямо отказывается от любой ответственности, включая ограничение косвенного или случайного ущерба.«Типичные» параметры, которые могут быть указаны в технических паспортах и / или спецификациях Motorola
, могут изменяться и изменяются в зависимости от приложения, а фактическая производительность может меняться со временем. Все рабочие параметры, включая «Типовые»
, должны быть утверждены для каждого приложения клиента техническими экспертами клиента. Motorola не передает никаких лицензий в соответствии со своими патентными правами или правами
других лиц. Продукты Motorola не предназначены, не предназначены и не авторизованы для использования в качестве компонентов в системах, предназначенных для хирургической имплантации в тело, или других приложениях
, предназначенных для поддержки или поддержания жизни, или для любого другого приложения, в котором отказ продукта Motorola может создать ситуация, при которой возможны травмы
или смерть.Если Покупатель приобретает или использует продукты Motorola для любого такого непреднамеренного или несанкционированного применения, Покупатель должен освободить Motorola
и его должностных лиц, сотрудников, дочерние компании, филиалы и дистрибьюторов от всех претензий, затрат, убытков и расходов, а также разумных гонораров адвокатам.
, вытекающие прямо или косвенно из любого иска о телесных повреждениях или смерти, связанных с таким непреднамеренным или несанкционированным использованием, даже если в таком иске утверждается, что
Motorola допустила халатность в отношении конструкции или изготовления детали.Motorola и являются зарегистрированными товарными знаками Motorola, Inc. Motorola, Inc. является равноправным работодателем
Opportunity / Affirmative Action.
Как с нами связаться:
США / ЕВРОПА / страны, не указанные в списке : Распространение литературы Motorola;
ЯПОНИЯ : Nippon Motorola Ltd .; TatsumiSPDJLDC, 6F SeibuButsuryuCenter,
P.
