Как собрать простого робота-следопыта на Arduino. Какие компоненты понадобятся. Как работает ИК-датчик линии. Схема подключения и программный код. Области применения роботов-следопытов.
Что такое робот-следопыт Arduino
Робот-следопыт Arduino — это автономное устройство, которое способно двигаться вдоль нарисованной на поверхности линии. Обычно используется черная линия на белом фоне, хотя возможны и другие варианты контрастных цветов. Робот определяет положение линии с помощью ИК-датчиков и корректирует свое движение, чтобы не сойти с маршрута.
Такие роботы часто используются в промышленности для автоматизации производственных процессов, а также в образовательных целях для обучения основам робототехники. Робот-следопыт на Arduino — отличный стартовый проект для новичков в робототехнике.
Необходимые компоненты для сборки
Для сборки простого робота-следопыта на Arduino понадобятся следующие компоненты:
- Arduino UNO или совместимая плата
- Драйвер двигателей L293D
- 2 мотор-редуктора
- Шасси робота
- 2 модуля ИК-датчика линии
- Черная изоляционная лента (для линии)
- Провода для соединений
- Батарейный отсек и батарейки
- Разъем питания
Вместо готовых модулей ИК-датчиков можно использовать отдельные компоненты — ИК-светодиоды и фотодиоды.

Принцип работы ИК-датчика линии
ИК-датчик линии состоит из ИК-светодиода и фотодиода, расположенных рядом друг с другом. Принцип его работы основан на отражении инфракрасного света от поверхности:
- Светлая поверхность хорошо отражает ИК-излучение, которое улавливается фотодиодом
- Темная поверхность (черная линия) поглощает ИК-излучение, сигнал на фотодиоде слабый
Таким образом, по уровню сигнала с фотодиода можно определить, находится ли датчик над черной линией или над светлой поверхностью. Обычно используются два таких датчика, расположенных по обе стороны от линии.
Схема подключения компонентов
Основные соединения в схеме робота-следопыта:
- ИК-датчики подключаются к цифровым входам Arduino
- Выходы Arduino соединяются с входами драйвера L293D
- Двигатели подключаются к выходам драйвера L293D
- Питание на двигатели подается через драйвер L293D
Подробная схема подключения всех компонентов приведена на рисунке ниже:
Алгоритм работы робота-следопыта
Принцип работы робота-следопыта на Arduino:
- Два ИК-датчика расположены по обе стороны от черной линии
- Arduino постоянно считывает сигналы с датчиков
- Если правый датчик обнаружил линию — робот поворачивает вправо
- Если левый датчик обнаружил линию — поворот влево
- Если оба датчика на белом — движение прямо
- Если оба датчика на черном — остановка
Arduino управляет скоростью и направлением вращения двигателей через драйвер L293D, корректируя движение робота.
Программный код для Arduino
Ниже приведен базовый скетч для управления роботом-следопытом на Arduino:
«`arduino // Пины подключения датчиков #define LEFT_SENSOR 2 #define RIGHT_SENSOR 3 // Пины подключения двигателей #define LEFT_MOTOR_FORWARD 4 #define LEFT_MOTOR_BACKWARD 5 #define RIGHT_MOTOR_FORWARD 6 #define RIGHT_MOTOR_BACKWARD 7 void setup() { pinMode(LEFT_SENSOR, INPUT); pinMode(RIGHT_SENSOR, INPUT); pinMode(LEFT_MOTOR_FORWARD, OUTPUT); pinMode(LEFT_MOTOR_BACKWARD, OUTPUT); pinMode(RIGHT_MOTOR_FORWARD, OUTPUT); pinMode(RIGHT_MOTOR_BACKWARD, OUTPUT); } void loop() { int leftSensorValue = digitalRead(LEFT_SENSOR); int rightSensorValue = digitalRead(RIGHT_SENSOR); if(leftSensorValue == LOW && rightSensorValue == LOW) { // Оба датчика на белом — движение вперед moveForward(); } else if(leftSensorValue == LOW && rightSensorValue == HIGH) { // Правый датчик на черном — поворот вправо turnRight(); } else if(leftSensorValue == HIGH && rightSensorValue == LOW) { // Левый датчик на черном — поворот влево turnLeft(); } else { // Оба датчика на черном — остановка stopMotors(); } } void moveForward() { digitalWrite(LEFT_MOTOR_FORWARD, HIGH); digitalWrite(LEFT_MOTOR_BACKWARD, LOW); digitalWrite(RIGHT_MOTOR_FORWARD, HIGH); digitalWrite(RIGHT_MOTOR_BACKWARD, LOW); } void turnRight() { digitalWrite(LEFT_MOTOR_FORWARD, HIGH); digitalWrite(LEFT_MOTOR_BACKWARD, LOW); digitalWrite(RIGHT_MOTOR_FORWARD, LOW); digitalWrite(RIGHT_MOTOR_BACKWARD, LOW); } void turnLeft() { digitalWrite(LEFT_MOTOR_FORWARD, LOW); digitalWrite(LEFT_MOTOR_BACKWARD, LOW); digitalWrite(RIGHT_MOTOR_FORWARD, HIGH); digitalWrite(RIGHT_MOTOR_BACKWARD, LOW); } void stopMotors() { digitalWrite(LEFT_MOTOR_FORWARD, LOW); digitalWrite(LEFT_MOTOR_BACKWARD, LOW); digitalWrite(RIGHT_MOTOR_FORWARD, LOW); digitalWrite(RIGHT_MOTOR_BACKWARD, LOW); } «`
Области применения роботов-следопытов
Роботы-следопыты находят применение во многих сферах:
- Автоматизация производственных процессов на заводах
- Автоматическая доставка грузов на складах
- Обслуживание посетителей в музеях и выставках
- Помощь людям с ограниченными возможностями
- Обучение основам робототехники
- Соревнования по робототехнике
С добавлением дополнительных датчиков и функций роботы-следопыты могут стать основой для более сложных автономных систем.
Как улучшить робота-следопыта
Существует несколько способов усовершенствовать базовую модель робота-следопыта:
- Добавить больше ИК-датчиков для более точного определения положения линии
- Использовать ПИД-регулятор для плавного движения
- Добавить ультразвуковой дальномер для обхода препятствий
- Использовать Bluetooth-модуль для удаленного управления
- Добавить LCD-дисплей для вывода информации
- Использовать аккумулятор вместо батареек для увеличения времени работы
Эти улучшения сделают робота более функциональным и позволят решать более сложные задачи.
Часто задаваемые вопросы
Какую ширину должна иметь линия для робота-следопыта?
Оптимальная ширина линии обычно составляет 15-20 мм. Она должна быть немного шире, чем расстояние между двумя ИК-датчиками на роботе.
Какой максимальной скорости может достичь робот-следопыт?
Может ли робот-следопыт двигаться по изогнутым линиям?
Да, базовая модель робота-следопыта способна двигаться по плавным изгибам линии. Для прохождения резких поворотов может потребоваться более сложный алгоритм управления.
Заключение
Создание робота-следопыта на Arduino — отличный способ начать изучение робототехники. Этот проект позволяет на практике применить знания по электронике, программированию и механике. Собрав базовую модель, вы сможете экспериментировать с различными улучшениями, развивая свои навыки в области робототехники.

Датчик слежения за линией Arduino
Описание Подключение датчика слежения за линией Применение
Датчик слежения за линией Arduino
Описание
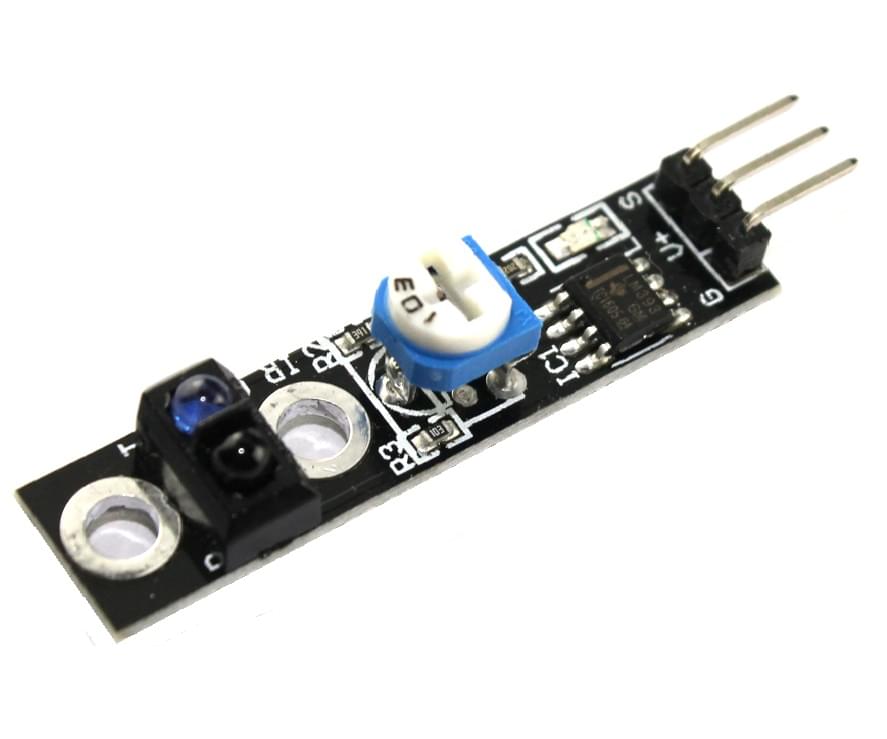
Датчик слежения за линией (рисунок 1), входящий в состав ARDUINO SENSOR KIT, является оптическим модулем предназначенным для обнаружения препятствий в виде белых или чёрных линий. Основным элементом датчика является оптопара TCRT5000, состоящая из инфракрасного светодиода и фототранзистора. Для исключения взаимного влияния светодиода и фототранзистора они конструктивно разделены перегородкой. Также в состав модуля входят компаратор, подстроечный резистор и контрольный светодиод. Подстрочный резистор предназначен для регулировки порога срабатывания датчика на разный оттенок чёрного цвета (при минимальном сопротивлении датчик отреагирует только на чёрный цвет, при максимальном – на серый). При срабатывании датчика загорается контрольный светодиод и подается логический нуль на сигнальный вывод датчика. Технические характеристики датчика слежения за линией представлены в таблице.
Технические характеристики датчика слежения за линией представлены в таблице.
Рисунок 1 — Датчик слежения за линией Arduino.
Таблица – Технические характеристики датчика слежения за линией Arduino.
| Параметр | Значение |
|---|---|
| Номинальное рабочее напряжение | от 3.3 В до 5 В |
| Тип используемого компаратора | LM393 |
| Максимальная нагрузка на выход компаратора | 15 мА |
| Тип используемого ИК датчика | TCRT5000 |
| Длина волны излучения | 950 нм |
| Расстояние уверенного определения препятствия | от 1 мм до 25 мм |
| Габаритные размеры | 40 мм x 11 мм x 11 мм |
Принцип работы датчика состоит в том, что при подаче питания на модуль, инфракрасный светодиод начинает излучать свет, который отражаясь от белой поверхности попадает на фототранзистор, на вывод OUT при этом подается логическая единица.
Подключение датчика слежения за линией
Распиновка датчика слежения за линией представлена на рисунке 2.
Рисунок 2 – Распиновка датчика слежения за линией Arduino.
Для его подключения потребуются:
- плата Arduino Uno / Arduino Nano / Arduino Mega;
- провода типа «папа-мама»;
- датчик слежения за линией;
- USB кабель для подключения платы Arduino к персональному компьютеру с установленной средой Arduino IDE.
Схема подключения датчика слежения за линией к плате Arduino представлена на рисунке 3.
Рисунок 3 – Подключение датчика слежения за линией к Arduino UNO.
Схемы подключения датчика слежения за линией к микроконтроллерам Arduino Uno, Arduino Nano или Arduino Mega принципиально ничем не отличаются.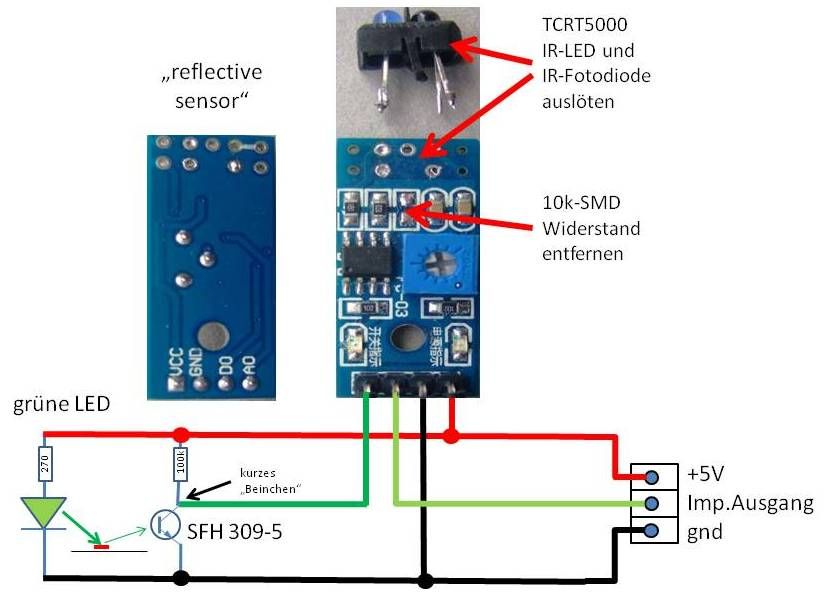
Подключается датчик слежения за линией к Arduino Uno следующим образом:
- GND — GND;
- VCC — 5V;
- OUT, вывод – к пину 2 (любой цифровой пин платы Arduino).
После сборки электрической схемы, необходимо загрузить управляющую программу (скетч) в микроконтроллер. Затем можно открыть монитор порта и понаблюдать за получаемыми значениями при наличии чёрной линии в области видимости фотоэлемента, и при её отсутствии.
Применение
Датчики слежения за линией широко применяются в отраслях связанных с автоматизацией процессов таких как ЧПУ и робототехника. В ЧПУ датчики слежения за линией применяются в качестве оптических концевых выключателей, энкодеров, детекторов препятствий и т.п. В области робототехники основным применением датчиков является направление, когда мобильный робот должен следовать по определённой траектории, например, их имеют бытовые роботы пылесосы. Датчики данного типа нашли широкое применение в соревнованиях роботов типа Roborace. В таких проектах, могут использоваться, не один, а группа датчиков, с помощью которых робот определяет границы маршрута.
В таких проектах, могут использоваться, не один, а группа датчиков, с помощью которых робот определяет границы маршрута.
датчик черной линии на базе CTRT5000
Корзина
Избранное
Оповещения
Кабинет
ПОКУПАТЕЛЮЧАТЫ
Каталог —
Встраиваемые модули
датчик черной линии на базе CTRT5000
Общая цена
120 р.
В корзину
Добавить в избранное
Артикул:123387
Производство:China(Китай)
Страна:КИТАЙ
В наличии
Описание
Модуль датчика линии RKP-ST-CTRT5000-3PIN предназначен для совместного использования с устройствами, использующими платформу ARDUINO (Ардуино).
Универсальный модуль оптического обнаружения препятствий, больше известного как датчик линий (Tracker Sensor) сочетает в себе два основных элемента: инфракрасный излучатель и инфракрасный приемник.
Непосредственно для излучения и приема инфракрасного сигнала в схеме использован ИК-излучатель/приемник TCRT5000.
Излучатель постоянно излучает свет в инфракрасном спектре и затем ловит отражение этого инфракрасного сигнала от поверхности. В зависимости от типа и цвета поверхности меняется интенсивность отраженного сигнала.
Модуль датчика линии RKP-ST-CTRT5000-3PIN это пороговый датчик. Он сравнивает уровень отраженного излучения с порогом и выдают результат (0 или 1), свидетельствующий о превышении заданного уровня. Выходной сигнал цифровой (белый цвет – высокий уровень, черный цвет – низкий уровень).
Модуль имеет высокую чувствительность и стабильность работы.
В робототехнике обычно используется для определения линии, по которой необходимо двигаться. Модуль трассировки пути для роботов. Обычно, датчик линии устанавливается под днищем робота, как можно ближе к поверхности.
Характеристики
Напряжение питания: 5 В
Датчик: CTRT5000
Формат сигнала цифрового выхода: TTL(0/1)
Подключается непосредственно к микроконтроллеру
Дальность обнаружения: 1 — 25 мм
Размеры: 35 x 10 мм
Вес: 5 гр.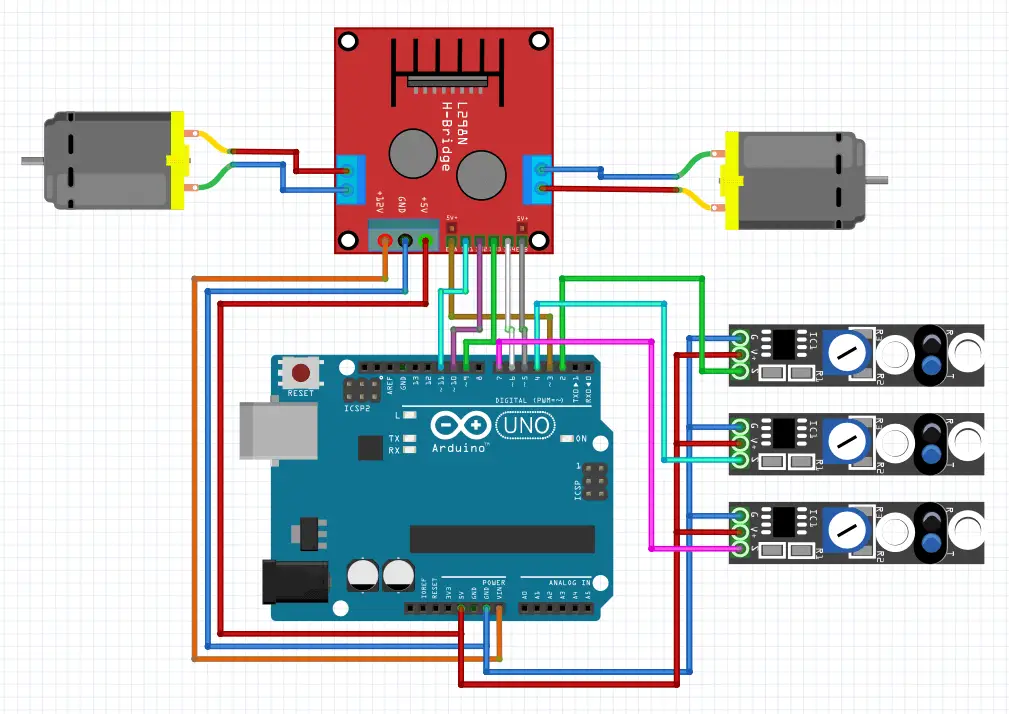
Развернуть описание
Технические параметры
| Тип | датчик |
Техническая документация
Модуль для Arduino Датчик черной линии на базе CTRT5000
317 КБ
Доставка
Мы осуществляем доставку Транспортными Компаниями и Почтой России.
Доставка Почтой России осуществляется по России в соответствии с утверждёнными тарифами на почтовую пересылку ФГУП «Почта России»
Вы недавно смотрели
датчик черной линии на базе CTRT5000
120 р.
Резистор переменный сдвоенный RK27112A0-S20-C0 10 кОм
Корпус для РЭА G939G [70×135×24]
500 р.
Транзистор NPN BC847B(KT3117A) SOT-23
Поставщики беспроводных радиочастот и ресурсы
Веб-сайт RF Wireless World является домом для поставщиков и ресурсов RF и Wireless.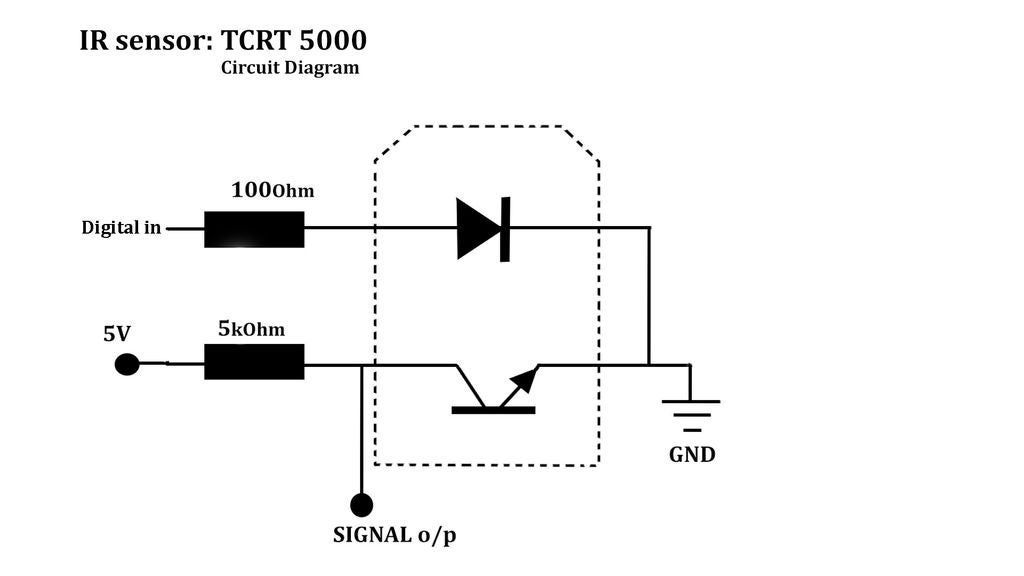 На сайте представлены статьи, учебные пособия, поставщики, терминология, исходный код (VHDL, Verilog, MATLAB, Labview), тесты и измерения,
калькуляторы, новости, книги, загрузки и многое другое.
На сайте представлены статьи, учебные пособия, поставщики, терминология, исходный код (VHDL, Verilog, MATLAB, Labview), тесты и измерения,
калькуляторы, новости, книги, загрузки и многое другое.
Сайт RF Wireless World охватывает ресурсы по различным темам, таким как RF, беспроводная связь, vsat, спутник, радар, оптоволокно, микроволновая печь, wimax, wlan, zigbee, LTE, 5G NR, GSM, GPRS, GPS, WCDMA, UMTS, TDSCDMA, Bluetooth, Lightwave RF, z-wave, Интернет вещей (IoT), M2M, Ethernet и т. д. Эти ресурсы основаны на стандартах IEEE и 3GPP. Он также имеет академический раздел, который охватывает колледжи и университеты по инженерным дисциплинам и дисциплинам MBA.
Статьи о системах на основе IoT
Система обнаружения падений для пожилых людей на основе IoT : В статье рассматривается архитектура системы обнаружения падений, используемой для пожилых людей.
В нем упоминаются преимущества или преимущества системы обнаружения падения IoT.
Подробнее➤
См.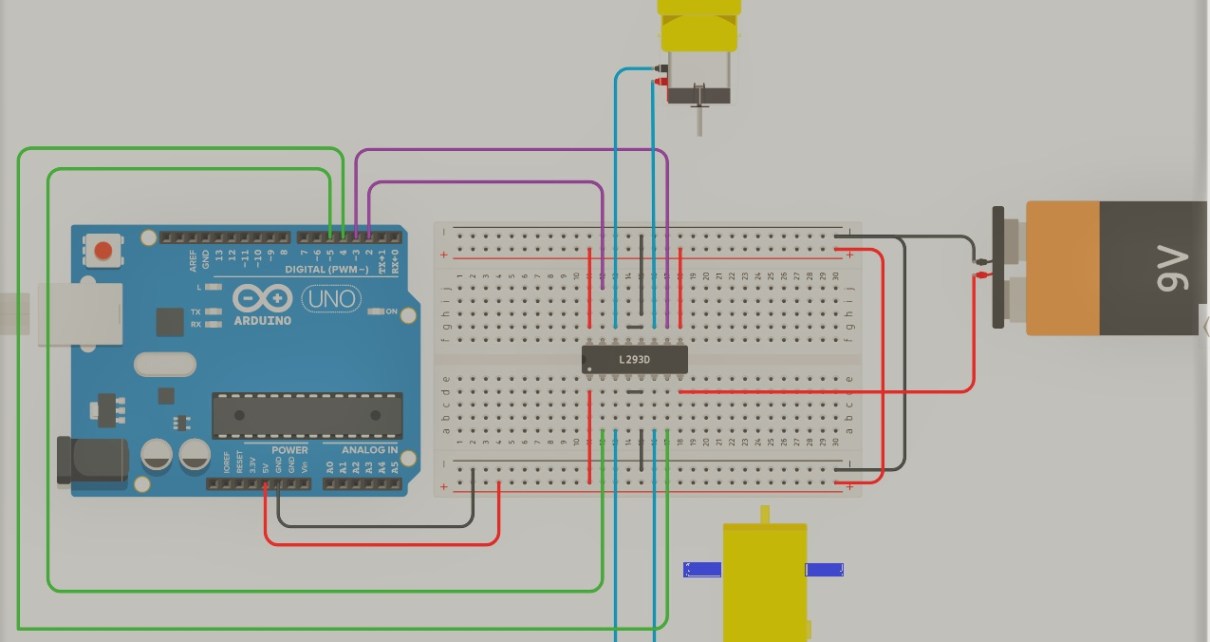 также другие статьи о системах на основе IoT:
также другие статьи о системах на основе IoT:
• Система очистки туалетов AirCraft.
• Система измерения удара при столкновении
• Система отслеживания скоропортящихся продуктов и овощей
• Система помощи водителю
• Система умной розничной торговли
• Система мониторинга качества воды
• Система интеллектуальной сети
• Умная система освещения на основе Zigbee
• Умная система парковки на базе Zigbee
• Умная система парковки на базе LoRaWAN.
Радиочастотные беспроводные изделия
Этот раздел статей охватывает статьи о физическом уровне (PHY), уровне MAC, стеке протоколов и сетевой архитектуре на основе WLAN, WiMAX, zigbee, GSM, GPRS, TD-SCDMA, LTE, 5G NR, VSAT, Gigabit Ethernet на основе IEEE/3GPP и т. д. , стандарты. Он также охватывает статьи, связанные с испытаниями и измерениями, посвященные испытаниям на соответствие, используемым для испытаний устройств на соответствие RF/PHY. СМ. УКАЗАТЕЛЬ СТАТЕЙ >>.
Физический уровень 5G NR : Обработка физического уровня для канала 5G NR PDSCH и канала 5G NR PUSCH была рассмотрена поэтапно. Это описание физического уровня 5G соответствует спецификациям физического уровня 3GPP.
Подробнее➤
Это описание физического уровня 5G соответствует спецификациям физического уровня 3GPP.
Подробнее➤
Основные сведения о повторителях и типы повторителей : В нем объясняются функции различных типов повторителей, используемых в беспроводных технологиях. Подробнее➤
Основы и типы замираний : В этой статье рассматриваются мелкомасштабные замирания, крупномасштабные замирания, медленные замирания, быстрые замирания и т. д., используемые в беспроводной связи. Подробнее➤
Архитектура сотового телефона 5G : В этой статье рассматривается блок-схема сотового телефона 5G с внутренними модулями 5G. Архитектура сотового телефона. Подробнее➤
Основы помех и типы помех: В этой статье рассматриваются помехи по соседнему каналу, помехи в одном канале, Электромагнитные помехи, ICI, ISI, световые помехи, звуковые помехи и т. д. Подробнее➤
Раздел 5G NR
В этом разделе рассматриваются функции 5G NR (новое радио), нумерология, диапазоны, архитектура, развертывание, стек протоколов (PHY, MAC, RLC, PDCP, RRC) и т.![]() д.
5G NR Краткий справочный указатель >>
д.
5G NR Краткий справочный указатель >>
• Мини-слот 5G NR
• Часть полосы пропускания 5G NR
• БАЗОВЫЙ НАБОР 5G NR
• Форматы 5G NR DCI
• 5G NR UCI
• Форматы слотов 5G NR
• IE 5G NR RRC
• 5G NR SSB, SS, PBCH
• 5G NR PRACH
• 5G NR PDCCH
• 5G NR PUCCH
• Опорные сигналы 5G NR
• 5G NR m-Sequence
• Золотая последовательность 5G NR
• 5G NR Zadoff Chu Sequence
• Физический уровень 5G NR
• MAC-уровень 5G NR
• Уровень 5G NR RLC
• Уровень PDCP 5G NR
Учебники по беспроводным технологиям
В этом разделе рассматриваются учебные пособия по радиочастотам и беспроводным сетям. Он охватывает учебные пособия по таким темам, как сотовая связь, WLAN (11ac, 11ad), wimax, bluetooth, zigbee, zwave, LTE, DSP, GSM, GPRS, GPS, UMTS, CDMA, UWB, RFID, радар, VSAT, спутник, беспроводная сеть, волновод, антенна, фемтосота, тестирование и измерения, IoT и т. д. См. ИНДЕКС УЧЕБНЫХ ПОСОБИЙ >>
Учебное пособие по 5G — В этом учебном пособии по 5G также рассматриваются следующие подтемы, посвященные технологии 5G:
Учебник по основам 5G
Диапазоны частот
учебник по миллиметровым волнам
Рамка волны 5G мм
Зондирование канала миллиметровых волн 5G
4G против 5G
Испытательное оборудование 5G
Архитектура сети 5G
Сетевые интерфейсы 5G NR
звучание канала
Типы каналов
5G FDD против TDD
Нарезка сети 5G NR
Что такое 5G NR
Режимы развертывания 5G NR
Что такое 5G ТФ
В этом учебнике GSM рассматриваются основы GSM, сетевая архитектура, сетевые элементы, системные спецификации, приложения,
Типы пакетов GSM, структура кадров GSM или иерархия кадров, логические каналы, физические каналы,
Физический уровень GSM или обработка речи, вход в сеть мобильного телефона GSM или настройка вызова или процедура включения питания,
Вызов MO, вызов MT, модуляция VAMOS, AMR, MSK, GMSK, физический уровень, стек протоколов, основы мобильного телефона,
Планирование RF, нисходящая линия связи PS и восходящая линия связи PS.
➤Читать дальше.
LTE Tutorial , описывающий архитектуру системы LTE, включая основы LTE EUTRAN и LTE Evolved Packet Core (EPC). Он предоставляет ссылку на обзор системы LTE, радиоинтерфейс LTE, терминологию LTE, категории LTE UE, структуру кадра LTE, физический уровень LTE, Стек протоколов LTE, каналы LTE (логические, транспортные, физические), пропускная способность LTE, агрегация несущих LTE, Voice Over LTE, расширенный LTE, Поставщики LTE и LTE vs LTE advanced.➤Подробнее.
Радиочастотные технологии Материал
На этой странице мира беспроводных радиочастот описывается пошаговое проектирование преобразователя частоты на примере повышающего преобразователя частоты 70 МГц в диапазон C.
для микрополосковой платы с использованием дискретных радиочастотных компонентов, а именно. Смесители, гетеродин, MMIC, синтезатор, опорный генератор OCXO,
амортизирующие прокладки. ➤Читать дальше.
➤ Проектирование и разработка РЧ приемопередатчика
➤Дизайн радиочастотного фильтра
➤Система VSAT
➤Типы и основы микрополосковых
➤Основы волновода
Секция испытаний и измерений
В этом разделе рассматриваются ресурсы по контролю и измерению, контрольно-измерительное оборудование для тестирования тестируемых устройств на основе
Стандарты WLAN, WiMAX, Zigbee, Bluetooth, GSM, UMTS, LTE.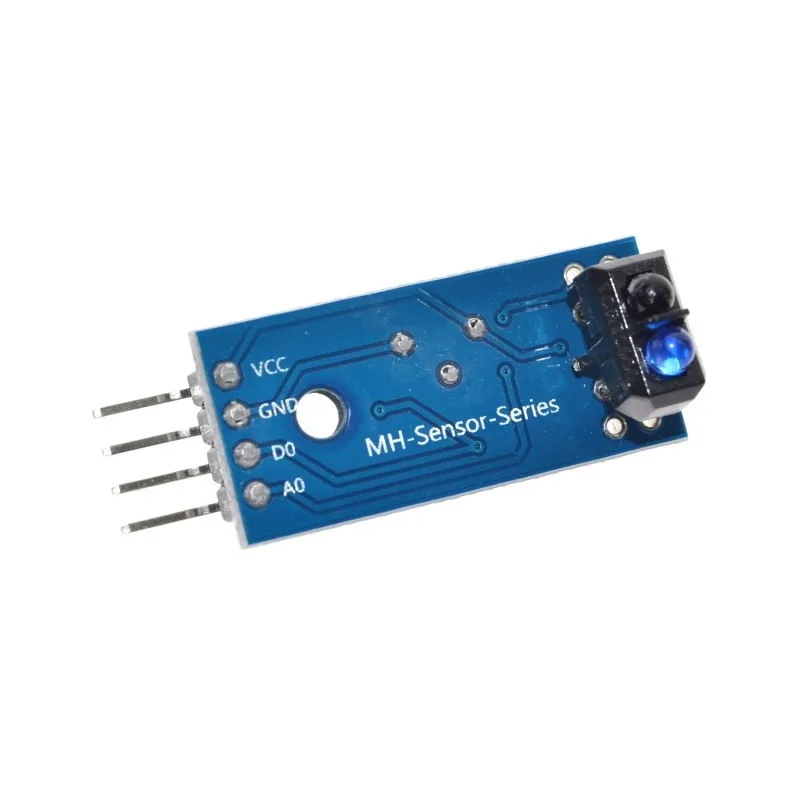 ИНДЕКС испытаний и измерений >>
ИНДЕКС испытаний и измерений >>
➤Система PXI для контрольно-измерительных приборов.
➤ Генерация и анализ сигналов
➤ Измерения физического уровня
➤ Тестирование устройства WiMAX на соответствие
➤ Тест на соответствие Zigbee
➤ Тест на соответствие LTE UE
➤ Тест на соответствие TD-SCDMA
Волоконно-оптические технологии
Волоконно-оптический компонент основы, включая детектор, оптический соединитель, изолятор, циркулятор, переключатели, усилитель,
фильтр, эквалайзер, мультиплексор, разъемы, демультиплексор и т. д. Эти компоненты используются в оптоволоконной связи.
ИНДЕКС оптических компонентов >>
➤Руководство по оптоволоконной связи
➤APS в SDH
➤Основы SONET
➤ Структура кадра SDH
➤ SONET против SDH
Поставщики беспроводных радиочастот, производители
Сайт RF Wireless World охватывает производителей и поставщиков различных радиочастотных компонентов, систем и подсистем для ярких приложений,
см. ИНДЕКС поставщиков >>.
Поставщики ВЧ-компонентов, включая ВЧ-изолятор, ВЧ-циркулятор, ВЧ-смеситель, ВЧ-усилитель, ВЧ-адаптер, ВЧ-разъем, ВЧ-модулятор, ВЧ-трансивер, PLL, VCO, синтезатор, антенну, осциллятор, делитель мощности, сумматор мощности, фильтр, аттенюатор, диплексер, дуплексер, чип-резистор, чип-конденсатор, чип-индуктор, ответвитель, ЭМС, программное обеспечение RF Design, диэлектрический материал, диод и т. д.
Поставщики радиочастотных компонентов >>
➤Базовая станция LTE
➤ РЧ-циркулятор
➤РЧ-изолятор
➤Кристаллический осциллятор
MATLAB, Labview, Embedded Исходные коды
Раздел исходного кода RF Wireless World охватывает коды, связанные с языками программирования MATLAB, VHDL, VERILOG и LABVIEW.
Эти коды полезны для новичков в этих языках.
СМОТРИТЕ ИНДЕКС ИСТОЧНИКОВ >>
➤ 3–8 код декодера VHDL
➤Скремблер-дескремблер Код MATLAB
➤32-битный код ALU Verilog
➤ T, D, JK, SR триггер коды labview
*Общая медицинская информация*
Сделайте эти пять простых вещей, чтобы помочь остановить коронавирус (COVID-19).
СДЕЛАЙТЕ ПЯТЬ
1. РУКИ: Мойте их часто
2. ЛОКОТЬ: кашляйте в него
3. ЛИЦО: Не прикасайтесь к нему
4. НОГИ: Держитесь на расстоянии более 3 футов (1 м) друг от друга
5. ЧУВСТВУЙТЕ: Болен? Оставайтесь дома
Используйте технологию отслеживания контактов >> , следуйте рекомендациям по социальному дистанцированию >> и установить систему наблюдения за данными >> спасти сотни жизней. Использование концепции телемедицины стало очень популярным в таких стран, как США и Китай, чтобы остановить распространение COVID-19так как это заразное заболевание.
Радиочастотные калькуляторы и преобразователи
Раздел «Калькуляторы и преобразователи» охватывает ВЧ-калькуляторы, беспроводные калькуляторы, а также преобразователи единиц измерения.
Они охватывают беспроводные технологии, такие как GSM, UMTS, LTE, 5G NR и т. д.
СМ. КАЛЬКУЛЯТОРЫ Указатель >>.
➤Калькулятор пропускной способности 5G NR
➤ 5G NR ARFCN и преобразование частоты
➤ Калькулятор скорости передачи данных LoRa
➤ LTE EARFCN для преобразования частоты
➤ Калькулятор антенны Yagi
➤ Калькулятор времени выборки 5G NR
IoT-Интернет вещей Беспроводные технологии
В разделе, посвященном IoT, рассматриваются беспроводные технологии Интернета вещей, такие как WLAN, WiMAX, Zigbee, Z-wave, UMTS, LTE, GSM, GPRS, THREAD, EnOcean, LoRa, SIGFOX, WHDI, Ethernet,
6LoWPAN, RF4CE, Bluetooth, Bluetooth с низким энергопотреблением (BLE), NFC, RFID, INSTEON, X10, KNX, ANT+, Wavenis, Dash7, HomePlug и другие.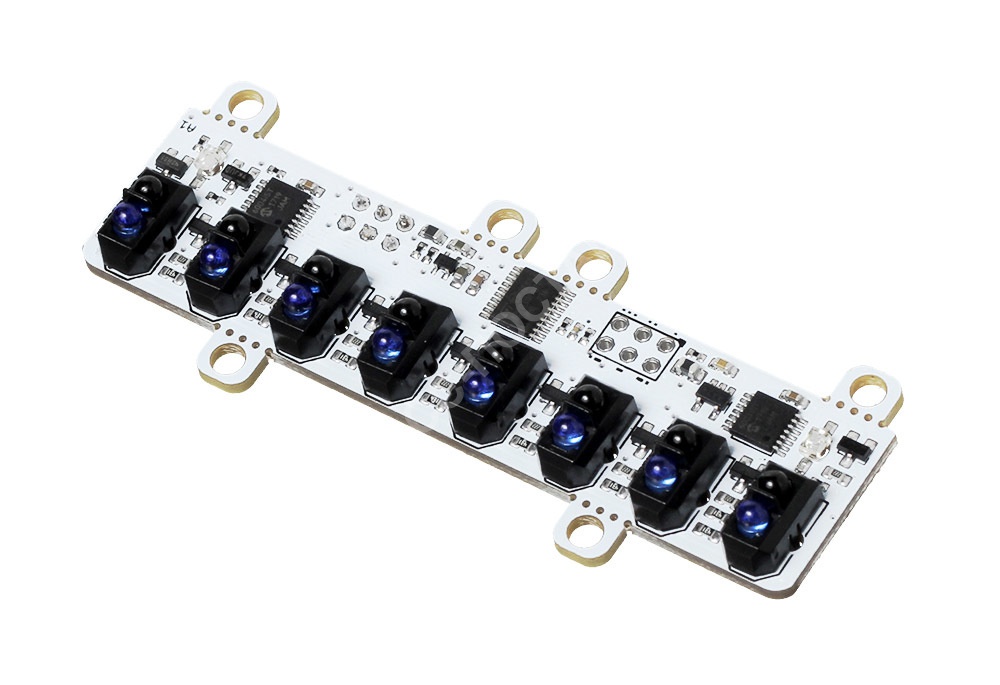 Он также охватывает датчики IoT, компоненты IoT и компании IoT.
Он также охватывает датчики IoT, компоненты IoT и компании IoT.
См. главную страницу IoT>> и следующие ссылки.
➤РЕЗЬБА
➤EnOcean
➤ Учебник LoRa
➤ Учебник по SIGFOX
➤ WHDI
➤6LoWPAN
➤Зигби RF4CE
➤NFC
➤Лонворкс
➤CEBus
➤УПБ
СВЯЗАННЫЕ ПОСТЫ
Учебники по беспроводным радиочастотам
GSM ТД-СКДМА ваймакс LTE UMTS GPRS CDMA SCADA беспроводная сеть 802.11ac 802.11ad GPS Зигби z-волна Bluetooth СШП Интернет вещей Т&М спутник Антенна РАДАР RFID
Различные типы датчиков
Датчик приближения Датчик присутствия против датчика движения Датчик LVDT и RVDT Датчик положения, смещения и уровня датчик силы и датчик деформации Датчик температуры датчик давления Датчик влажности датчик МЭМС Сенсорный датчик Тактильный датчик Беспроводной датчик Датчик движения Датчик LoRaWAN Световой датчик Ультразвуковой датчик Датчик массового расхода воздуха Инфразвуковой датчик Датчик скорости Датчик дыма Инфракрасный датчик Датчик ЭДС Датчик уровня Активный датчик движения против пассивного датчика движения
Поделиться этой страницей
Перевести эту страницу
СТАТЬИ
Раздел T&M
ТЕРМИНОЛОГИИ
Учебники
Работа и карьера
ПОСТАВЩИКИ
Интернет вещей
Онлайн калькуляторы
исходные коды
ПРИЛОЖЕНИЕ. ПРИМЕЧАНИЯ
Всемирный веб-сайт T&M
ПРИМЕЧАНИЯ
Всемирный веб-сайт T&M
Робот следования линии Arduino
Робот следования линии, как следует из названия, представляет собой автоматизированное транспортное средство, которое следует визуальной линии, встроенной в пол или потолок. Обычно визуальная линия — это путь, по которому движется робот, следящий за линией, и это будет черная линия на белой поверхности, но возможен и другой путь (белая линия на черной поверхности). Некоторые продвинутые роботы следования за линией используют невидимое магнитное поле в качестве пути.
Крупные роботы, следящие за линией, обычно используются в промышленности для поддержки автоматизированного производственного процесса. Они также используются в военных целях, для оказания помощи людям, в службах доставки и т. д.
Робот-следопыт — один из первых роботов, с которыми новички и студенты получат свой первый опыт работы с роботами. В этом проекте мы разработали простого робота, следящего за линией, используя Arduino и некоторые другие компоненты.
Путь следящего робота Arduino Line
Робот следящего устройства Arduino 1
Робот следящего устройства Arduino 2
Робот следящего устройства Arduino. ) [Купить здесь]
Примечание : Мы использовали готовый модуль ИК-датчика, который состоит из ИК-светодиода и фотодиода. Если у вас его нет, мы объяснили, как сделать его самостоятельно.
Блок-схема проекта
Робот, следящий за линией, созданный в этом проекте, разделен на 4 блока. На следующем изображении показана блок-схема робота, следящего за линией.
Описание блок-схемы
Датчики (ИК-датчик) : Мы использовали модуль ИК-датчика в качестве датчика обнаружения линии для проекта. Он состоит из ИК-светодиода, фотодиода и некоторых других компонентов, таких как компаратор, светодиод и т. д.
Как упоминалось ранее, мы использовали предварительно собранный ИК-датчик. Если у вас его нет, вы можете сделать свой собственный датчик, используя следующую схему.
Работа ИК-датчика и его возможности в этом проекте будут объяснены на примере реальной работы робота-следопыта.
Контроллер (Arduino UNO) : Arduino UNO является основным контроллером в проекте. Данные от датчиков (ИК-датчиков) будут переданы в Arduino, и он подаст соответствующие сигналы на микросхему драйвера двигателя.
Драйвер двигателя (L293D) : ИС драйвера двигателя L293D используется в этом проекте для управления двигателями робота. Он получает сигналы от Arduino на основе информации от ИК-датчиков.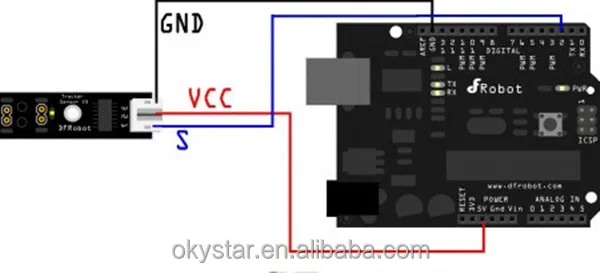
Примечание : Электропитание двигателей должно подаваться от микросхемы драйвера двигателя. Следовательно, выберите соответствующий источник питания, достаточный для всех компонентов, включая двигатели.
Моторы (Мотор-редукторы) : Мы использовали два мотор-редуктора в задней части робота, следящего за линией. Эти двигатели обеспечивают больший крутящий момент, чем обычные двигатели, и также могут использоваться для перевозки некоторой нагрузки.
Работа робота следования линии Arduino
В этом проекте мы разработали робота следования линии на базе Arduino. Работа проекта довольно проста: найдите черную линию на поверхности и двигайтесь вдоль этой линии. Подробная работа описана здесь.
Как указано на блок-схеме, нам нужны датчики для обнаружения линии. Для логики обнаружения линии мы использовали два ИК-датчика, которые состоят из ИК-светодиода и фотодиода. Они расположены отражающим образом, то есть рядом друг с другом, так что всякий раз, когда они приближаются к отражающей поверхности, свет, излучаемый ИК-светодиодом, будет обнаруживаться фотодиодом.
На следующем рисунке показана работа типичного ИК-датчика (пара ИК-светодиод — фотодиод) перед светлой и черной поверхностью. Поскольку коэффициент отражения светлой поверхности высок, инфракрасный свет, излучаемый ИК-светодиодом, будет максимально отражаться и обнаруживаться фотодиодом.
В случае черной поверхности, имеющей низкий коэффициент отражения, свет полностью поглощается черной поверхностью и не достигает фотодиода.
Используя тот же принцип, мы настроим ИК-датчики робота-следопыта таким образом, чтобы два ИК-датчика находились по обе стороны от черной линии на полу. Настройка показана ниже.
Когда робот движется вперед, оба датчика ожидают обнаружения линии. Например, если ИК-датчик 1 на изображении выше обнаруживает черную линию, это означает, что впереди правый поворот (или поворот).
Arduino UNO обнаруживает это изменение и отправляет соответствующий сигнал драйверу двигателя. Чтобы повернуть направо, двигатель с правой стороны робота замедляется с помощью ШИМ, а двигатель с левой стороны работает с нормальной скоростью.
Аналогично, когда ИК-датчик 2 сначала обнаруживает черную линию, это означает, что впереди левый поворот, и робот должен повернуть налево. Чтобы робот повернул налево, двигатель на левой стороне робота замедляется (или может быть полностью остановлен или может вращаться в противоположном направлении), а двигатель на правой стороне работает с нормальной скоростью.
Arduino UNO постоянно отслеживает данные с обоих датчиков и поворачивает робота по обнаруженной ими линии.
Код
Примечание :
- Для повышения эффективности обнаружения черных линий можно увеличить количество датчиков. Массив датчиков будет более точным, чем просто два датчика.
- В этом проекте (где используются два датчика) очень важно расположение датчиков. Ширина черной линии играет важную роль при размещении датчиков.
- Датчик для обнаружения линии также может быть сконструирован с использованием пары светодиодов и фоторезисторов.

Применение роботов следования линии
- Роботы следования линии обычно используются для автоматизации процессов в промышленности, военных приложениях и потребительских приложениях.
- Они очень полезны, так как могут работать без присмотра, т.е. они работают как транспортные средства с автоматическим управлением.
- Благодаря дополнительным функциям, таким как предотвращение препятствий и другие меры безопасности, роботы-следопыты могут использоваться в автомобилях без водителя.
Видео по созданию и выпуску
Это стартовый набор, который появился, когда движению робота придается высокий приоритет. Он следует по пути визуальной линии, а некоторые продвинутые роботы, следующие по линии, используют невидимое магнитное поле в качестве пути.
Как вам известно, применение роботов в военных, промышленных и бытовых целях пользуется большим спросом.