Что такое гироскоп в смартфоне. Как работает гироскоп в телефоне. Для чего нужен гироскоп в мобильном устройстве. Чем отличается гироскоп от акселерометра. Как проверить работоспособность гироскопа.
Что такое гироскоп в смартфоне и как он работает
Гироскоп в смартфоне — это миниатюрный датчик, который определяет положение устройства в пространстве. Он представляет собой небольшой чип размером всего несколько миллиметров.
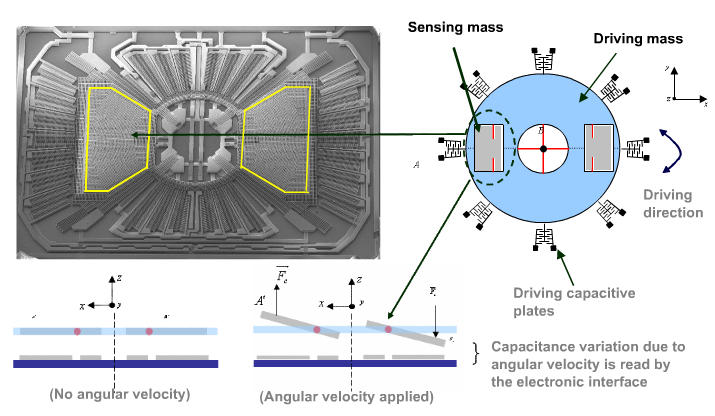
Принцип работы гироскопа в телефоне основан на преобразовании механической энергии в электрическую. Внутри датчика находятся подвижные массы вещества, смещение которых приводит к изменению электрической емкости конденсаторов. Эти изменения регистрируются микропроцессором.
Гироскоп вычисляет угол наклона смартфона относительно поверхности Земли и передает эти данные операционной системе. Современные гироскопы способны определять отклонения с точностью до 1-2 градусов.
Основные функции гироскопа в мобильном устройстве
Гироскоп в смартфоне выполняет следующие важные функции:

- Обеспечивает возможность просмотра видео в формате 360 градусов
- Позволяет использовать функцию разблокировки устройства встряхиванием
- Необходим для корректной работы GPS-навигации и электронного компаса
- Обеспечивает управление в мобильных играх поворотами устройства
- Отвечает за автоматический поворот экрана при изменении положения смартфона
Без гироскопа многие привычные функции современных смартфонов были бы недоступны пользователям.
Чем отличается гироскоп от акселерометра
Гироскоп и акселерометр — это два разных датчика в смартфоне, которые часто путают:
- Гироскоп измеряет угол наклона устройства относительно поверхности Земли
- Акселерометр определяет ускорение движения смартфона
Основное отличие заключается в принципе считывания данных. При этом оба датчика дополняют друг друга и часто используются совместно для более точного определения положения устройства в пространстве.
Как проверить работоспособность гироскопа в телефоне
Существует несколько простых способов проверить, работает ли гироскоп в вашем смартфоне:

- Запустите видео в формате 360 градусов на YouTube и попробуйте поворачивать телефон — изображение должно меняться.
- Включите игру с управлением наклоном устройства и проверьте отзывчивость.
- Установите специальное приложение для тестирования датчиков, например Sensor Box For Android.
- Используйте программы полной диагностики смартфона, такие как AnTuTu Benchmark или AIDA64.
Если при выполнении этих тестов гироскоп реагирует на изменение положения устройства, значит он исправен и корректно работает.
Преимущества и недостатки использования гироскопа
Использование гироскопа в смартфонах имеет как плюсы, так и минусы:
Преимущества:
- Расширение функциональных возможностей устройства
- Улучшение пользовательского опыта в играх и приложениях
- Повышение точности навигации и определения местоположения
Недостатки:
- Увеличение энергопотребления смартфона
- Возможные сбои при сильной вибрации или тряске
- Необходимость периодической калибровки для точной работы
Несмотря на некоторые недостатки, преимущества использования гироскопа значительно перевешивают, поэтому большинство современных смартфонов оснащаются этим датчиком.
Применение гироскопа в различных сферах
Гироскопы нашли широкое применение не только в мобильных устройствах. Эта технология используется во многих отраслях:
- Авиация — для определения положения и ориентации самолетов
- Морская навигация — в системах стабилизации судов
- Космонавтика — для управления ориентацией космических аппаратов
- Робототехника — в системах балансировки и навигации роботов
- Автомобилестроение — в системах стабилизации и помощи водителю
Развитие технологии гироскопов продолжается, открывая новые возможности для их применения в различных областях.
Перспективы развития гироскопов в мобильных устройствах
Технология гироскопов в смартфонах постоянно совершенствуется. Основные направления развития включают:
- Уменьшение размеров и энергопотребления датчиков
- Повышение точности измерений
- Интеграция с другими сенсорами для комплексного анализа движения
- Расширение функциональности в приложениях дополненной и виртуальной реальности
В будущем гироскопы могут стать еще более важным компонентом мобильных устройств, открывая новые возможности для пользователей и разработчиков приложений.
Что такое гироскоп в смартфоне и зачем он нужен?
Множеством интересных функций и датчиков оснащены смартфоны и другие мобильные устройства. Одним из ведущих модулей является гиродатчик или гироскоп. Диковинная новинка в девайсе, выполненная на основе микроэлектромеханической системы, сделала большой рывок в усовершенствование функционала и завоевала большую симпатию среди пользователей. Происхождение слова «гироскоп» имеет давнюю историю. Оно расшифровывается как словосочетание «круг» и «смотрю».
Родоначальником древнегреческого изречения был французский физик Леон Фуко. В XIX веке он занимался исследованием суточного вращения Земли, и этот термин подошёл для нового устройства как нельзя кстати. Гиродатчиками пользуются авиакомпании, судоходство, космонавтика. Компания Apple, производитель современных мобильных телефонов, первой взяла за основу данный функционал и внедрила его в iPhone 4. Несмотря на то, что видео ниже на английском языке, демонстрация технологии от Стив Джобса понятна без перевода.
Теперь, для того чтобы ответить на входящие звонки или полистать страницы электронной книги, достаточно только встряхнуть телефон. За счёт устройства быстро просматриваются фотографии и другие изображения, меняется музыка. Новое приложение у смартфона iPone под названием CoveFlow позволило использовать калькулятор. Теперь легко выполняются такие функции, как деление, умножение, сложение и вычитание. При повороте телефона на 90° данная функция машинально переключается на развёрнутый функционал со множеством сложных математических действий.
Наряду с легкими функциями разработчики внедрили в устройство более сложные программные обеспечения. Например, в некоторых операционных системах при помощи встряхивания телефона запускается обновление для Bluetooth или запускается специфичная программа по измерению углов наклона и уровня. Гироскоп прекрасно учитывает скорость перемещения, и определяет местоположение человека на незнакомой местности.
С технической точки зрения, гироскоп довольно сложное устройство. При его разработке, за основу взяли принцип работы акселерометра, который представляет из себя колбу с пружиной и грузом внутри. На одной стороне пружины закреплен груз, а вторая сторона пружины зафиксирована на демпфере для гашения колебания. При встряхивании (ускорении) измерительного прибора, прикрепленная масса движется и приводит в напряжение пружину.
Такие колебания можно представить в виде данных. Если расположить три таких акселерометра перпендикулярно, то можно получить представление о том, как расположен предмет в пространстве. Поскольку технически расположить такой громоздкий измерительный прибор в смартфоне невозможно, то принцип работы оставили тот же, но груз заменили инертной массой, который расположен в очень маленьком чипе. При ускорении, меняется положение инертной массы и таки образом рассчитывается положение смартфона в пространстве.
С помощью GPS-навигации на дисплее появляется карта, которая фиксирует аналогичное направление объектов при любом повороте тела. Другими словами, если вы повернулись лицом к реке, то она автоматически отобразится на карте. При развороте на 180 градусов к водоему мгновенно происходят аналогичные изменения на мониторе. С использованием этой функции упрощается ориентировка на местности. Особенно это важно людям, занимающимся активными видами отдыха.Благодаря точному учёту скорости перемещения управление смартфоном становится более удобным и гармоничным. Зачастую используют гироскопы на Андроид любители компьютерных игр — геймеры. Уникальное устройство в девайсе молниеносно превращает картинки в реальность. Особенно правдоподобными становятся гонки, симуляторы, стрелялки, Pokemon Go.
Достаточно изменить положение смартфона и скорость поворота, то езда на виртуальном автомобиле покажется вам реальной. Герои на дисплее точно направят автомат, нацелят пушку, повернут руль, поднимут в воздух вертолёт, убьют врага. Карманные монстры не будут прыгать по виртуальной траве, а станут двигаться по настоящему миру в видимой области встроенной камеры.
Конечно, это далеко не весь перечень положительных характеристик, присущих Android смартфонам и iPhone. Перечислять приятные и удобные моменты можно бесконечно. Однако не все пользователи оценили универсальные качества по достоинству. Одни предпочли отказаться от гироскопа в новом смартфоне, другие просто отключили его. И этому есть своё объяснение.
Среди многочисленных плюсов бывают малозаметные минусы.
- Из недостатков следует выделить установку отдельных приложений, реагирующих с незначительным опозданием на изменения положений в пространстве. Вроде бы сущий пустяк, но наличие этого сенсора доставляет определённые неудобства пользователю смартфона. Особенно заметны недостатки при чтении электронной книги лёжа. Читающий меняет позу, в это же время, связанный с устройством гиродатчик изменяет положение странички. Приходится в срочном порядке перенастраивать её ориентацию.
- Производители смартфонов на своих презентациях в большинстве случаев умалчивают о наличии важного датчика. При покупке новой модели присутствие гироскопа можно обнаружить в технических характеристиках гаджета в перечне датчиков. Есть и другие способы, например, установка клиента YouTube, позволяющая быстро установить функционал. Использование приложения AnTuTu Benchmark, Sensor Sense также устанавливает встроенный гиродатчик или его отсутствие.
Современный элемент смартфона работает на постоянной основе. Это самостоятельный датчик, не требующий калибровки. Его не нужно ни включать, ни отключать. Автоматика сделает эту работу за вас. В случае если устройство отсутствует, то вы не сможете играть в виртуальную реальность. Вам просто придётся купить новый телефон со встроенными функциями.
Читайте также
Поделитесь в соцсетях:
-
5
0
Как я понимаю, смотря по какой оси. Если вокруг Z или X (большинство вращений), то нет, а если вокруг Y, то да. Но вращение вокруг Y можно отследить и компасом (но искусственные поля от приборов могут мешать).
-
7
0
Для поворота экрана не нужен гироскоп, достаточно акселерометра.
-
2
0
А сами как думаете?
-
9
0
Здравствуйте, в первую очередь спасибо большое за такую интересную и полезную статью,я узнал очень многое. Но вот возник один вопрос, а обычный поворот экрана в телефоне тоже считается результатом работы гиродатчика?
-
8
0
Гироскоп действительно маленькая, но высокотехнологичная и зачастую незаменимая вещь в смартфоне. Лично мне как охотнику очень помогает в определении пройденного пути, использовании программного компаса, а так же при просмотре карт в различном разрешении.
-
8
0
Статья не только познавательная,но и с технической точки зрения точно обоснована и аргументирована. Автор детально и при этом доступно раскрывает тему. Большое спасибо.
-
7
0
Данная функция в современных реалиях действительно востребована в смартфонах и планшетах. Все мы когда-то чего-то не знали и только лишь немногие продолжают интересоваться и чему-то учиться. Все поправимо. Удачи!
-
3
0
Познавательная статья! Пользуюсь каждый день телефоном, а как он устроен по сути и не знаю. Привыкла, что если функция поворота экрана включена, то она работает. Современные геймеры наверно уже не представляют своей жизни, без этого гиродатчика, ведь они бы не смогли бы играть в того же самого Покемон ГО.
Для чего нужен гироскоп в телефоне
Функциональные возможности нынешних мобильных телефонов огромные. Это уже не только звонки и обмен текстовыми сообщениями SMS. Современные телефоны – это очень сложные девайсы, которые содержат много модулей и датчиков.Смартфон теперь является универсальным гаджетом, который начинен самыми разными сенсорами. К сожалению, не каждый пользователь интересуется тем, из чего состоит его гаджет. Для человека важно иметь качественное устройство, которое предоставит ему возможность произвести запуск игры, просмотреть видео и посетить веб-сайты.
Однако, когда тщательно изучаешь информацию, то можешь обнаружить немало деталей, которые кажутся ненужными. Но ведь они установлены в телефонах? Значит, они нужны. Есть также во многих моделях и специфические датчики. Благодаря ним, телефон может определить свое положение в пространстве.
Данная статья посвящена гироскопу в телефоне. В ней мы расскажем о том, каково его предназначение, а также о том, как его нужно настраивать.
Чем отличается гироскоп в телефоне
Гироскоп – это устройство механическое или электромеханическое. Оно может определить собственный угол наклона относительно поверхности Земли. По сравнению с другими аналогичными девайсами его изобрели относительно поздно. Если сказать точно, то 1817 году.В те времена это было очень громоздкое устройство. Прибор представлял собой круг, который вращается вокруг оси. Для сравнения можно сказать, что он очень напоминал волчок или юлу для детей.
Главным элементом конструкции гироскопа является ротор-волчок, который вращается вокруг вертикальной оси. Подчеркнем при этом, что ось способна изменить положение в пространстве. Скорость вращения волчка намного выше скорости поворота оси его вращения. За счет этого волчок постоянно сохраняет свое положение. Он не зависит от сил, которые действуют на него извне. В этом и есть весь принцип действия гироскопа.
Поначалу данное незамысловатое устройство применяли как учебное пособие. Однако со временем ему нашли и практическое применение. Произошло это через 60 лет после того, как его изобрели. Именно тогда инженер Обри догадался, что можно устанавливать гироскоп в торпеды для того, чтобы можно было стабилизировать их курс.
В настоящее время это полезное изобретение многократно усовершенствовали. Оно нашло широкое распространение в самых разных механизмах.
ВАЖНО! Конечно, в смартфоны устанавливают совершенно другие конструкции. Это маленький датчик, у которого длина в 3-5 мм, высота 5 мм, а ширина в 4 мм. Габариты просто смешные. Несмотря на это, многие производители отказываются устанавливать гироскопы в свои аппараты. Все потому, что они стремятся сделать телефон как можно тоньше.
Гироскоп в телефоне – это специальный датчик. Он предназначен для того, чтобы определять положения аппарата в пространстве.Понятно, что гироскоп в смартфоне значительно отличается по своей конструкции от классических гироскопов. А ведь предназначение его такое же. В нем механическая энергия преобразуется в электрическую, которая формирует последовательность битов – бинарный код, который положен в основу каждой компьютерной программной системы.
Конечно, в гироскопах электронных устройств никаких вращающихся волчков нет. Они очень маленькие для этого. Вместо них нашли применение подвижные массы вещества. Когда они смещаются, то это приводит к тому, что изменяется электрическая емкость конденсаторов. И это регистрирует микропроцессор.
Гироскоп вычисляет, каков угол наклона девайса относительно земли, а затем он осуществляет передачу полученных данных в операционную систему.
Если бы такого датчика не было бы, то появились бы проблемы во время игр. Особенно это касается гонок. Ведь в них для того, чтобы управлять, необходимо делать повороты смартфоном.
ВАЖНО! Качественные гироскопы настолько точные, что могут определить отклонения на 1-2 градуса. Этого бывает достаточно для того, чтобы своевременно вовремя изменить ориентацию экрана телефона или сделать поворот игрового персонажа.
Функции гироскопа в телефоне
Как мы уже говорили ранее, гироскоп в телефоне предназначен, прежде всего, для того, чтобы определять положения девайса в пространстве. Однако зачем система должна знать, насколько градусов наклонился смартфон? Ответ на данный вопрос можно найти далее, когда ознакомишься с таким перечнем функций гироскопа:— Просмотр видео в 360 градусов. Если вы обладаете очками виртуальной реальности, то сможете вести просмотр роликов и играть в игры, не нажимая на экран. Каждый поворот становится возможным за счет гироскопа.
— Встряхивание телефона. Без такого датчика невозможно было бы применить функцию, которая позволяла бы провести разблокировку смартфона после того, как его встряхнешь.
— Использование навигации. Если нет гироскопа, то не будет также практической возможности пользоваться GPS и компасом. Данный датчик предоставляет возможность определять стороны горизонта, а также, где расположен человек относительно спутника.
— Управление персонажем в играх. Есть очень много мобильных игр, в которых для того, чтобы управлять автомобилем или героем, необходимо делать повороты телефоном. И если бы не было гироскопа, то система никак не смогла бы понять, где находится девайс.
ВАЖНО! Безусловно, в этом перечне приведены не все ситуации, в которых применяется гироскоп. Однако их будет достаточно для того, чтобы первоначально ознакомиться.
В чем разница между гироскопом и акселерометром
Конструктивно акселерометры напоминают гироскопы. В них также есть подвижный элемент. Это специальный грузик. Когда он смещается при наклоне девайса, то воздействует на пьезокристалл.Гироскоп и акселерометр – это датчики. И один, и второй предназначены для того, чтобы определять положения смартфона в пространстве. Отличие между ними, самое главное и единственное, в том, что отличается принцип считывания данных.
Первый компонент высчитывает, каков угол наклона телефона относительно поверхности земли. Он потом осуществляет передачу полученной информации в ОС. А вот акселерометр вычисляет ускорение. Делает он это с большой точностью.
Вот почему, если вам нужен шагомер, то вы можете применить телефон с акселерометром. Данные, полученные таким путем, будут максимально точными. Все потому, что датчик учитывает отклонения даже на десятые доли миллиметра.
ВАЖНО! Современные производители обычно производят установку в свои смартфоны как гироскопа, так и акселерометра. Данное решение абсолютно правильное. Ведь оно исключает случайные повороты экрана девайса, когда его перемещаешь.
Способы проверки гироскопа в телефоне
Сейчас практически не встретишь смартфона, в котором не было бы датчика для того, чтобы определять положение гаджета в пространстве. Гироскоп не требует, чтобы его как-то активировали в настройках. Зато проверять его работоспособность нужно постоянно. Проще всего это сделать, запустив видео в 360 градусов на YouTube.Для этого делаем так:
— Открываем мобильное приложение YouTube.
— В поиске вводим запрос «360 градусов».
— Запускаем какое-либо видео, которое поддерживает просмотр в режиме 360 градусов.
Пробуем повернуть телефон. При изменении изображения относительно угла наклона гироскоп действует корректно. А когда ничего не происходит, то нужно убедиться в активации автоповорота экрана. Точно так же запускаем игру и пытаемся управлять персонажем. Когда все работает корректно, то это означает, что с гироскопом все нормально.
ВАЖНО! Если вам необходимы более точные тесты, то нужно применить специальное приложение. Как пример, рассмотрим работу утилиты Sensor Box For Android.
Устанавливаем приложение из Google Play, а затем выполняем рекомендации инструкции:— Переходим во вкладку «Sensor Box».
Нажимаем по пункту «Accelerometer Sensor».
— Затем поворачиваем телефон и контролируем шарик на экране. Когда видишь синхронное передвижение объекта на экране при наклоне телефона, то это означает, что с гироскопом или акселерометром нет проблем.
А еще можно нажать по строке «Hardware». Там будет приведена информация о датчике, который установлен.
Если есть желание, то можете установить другое приложение. В частности, AnTuTu Benchmark или AIDA64, а потом заняться полной проверкой смартфона.
ВАЖНО! Скажем, когда используется AIDA64, то необходимо произвести запуск приложения и перейти в раздел «Датчики». Там для вас будет информацию о комплектующих, которые установлены. Там вы обнаружите и сведения о гироскопе.
Итак, гироскоп – важный датчик. Он предоставляет возможность системе определить, где расположен телефон в пространстве. Без него у вас не получится активировать автоповорот экрана, смотреть видео в очках виртуальной реальности, а также корректно пользоваться навигацией.
Датчик положения (гироскоп/акселерометр) [Роботрек вики]
ТЕХНИЧЕСКИЕ ХАРАКТЕРИСТИКИ
1) Модель MPU-6050
2) Напряжение питания : от 3.3 до 5.0 В
3) Рабочий ток: < 5 мА
4) Диапазон измеряемых акселерометром ускорений: +/- 2g, +/- 4g, +/- 8g, +/- 16g
5) Диапазон измеряемых гироскопом угловых скоростей: ± 250, 500, 1000, 2000 °/сек
6) Количество осей: 3
7) Интерфейс подключения: 4-проводной I2C
Описание
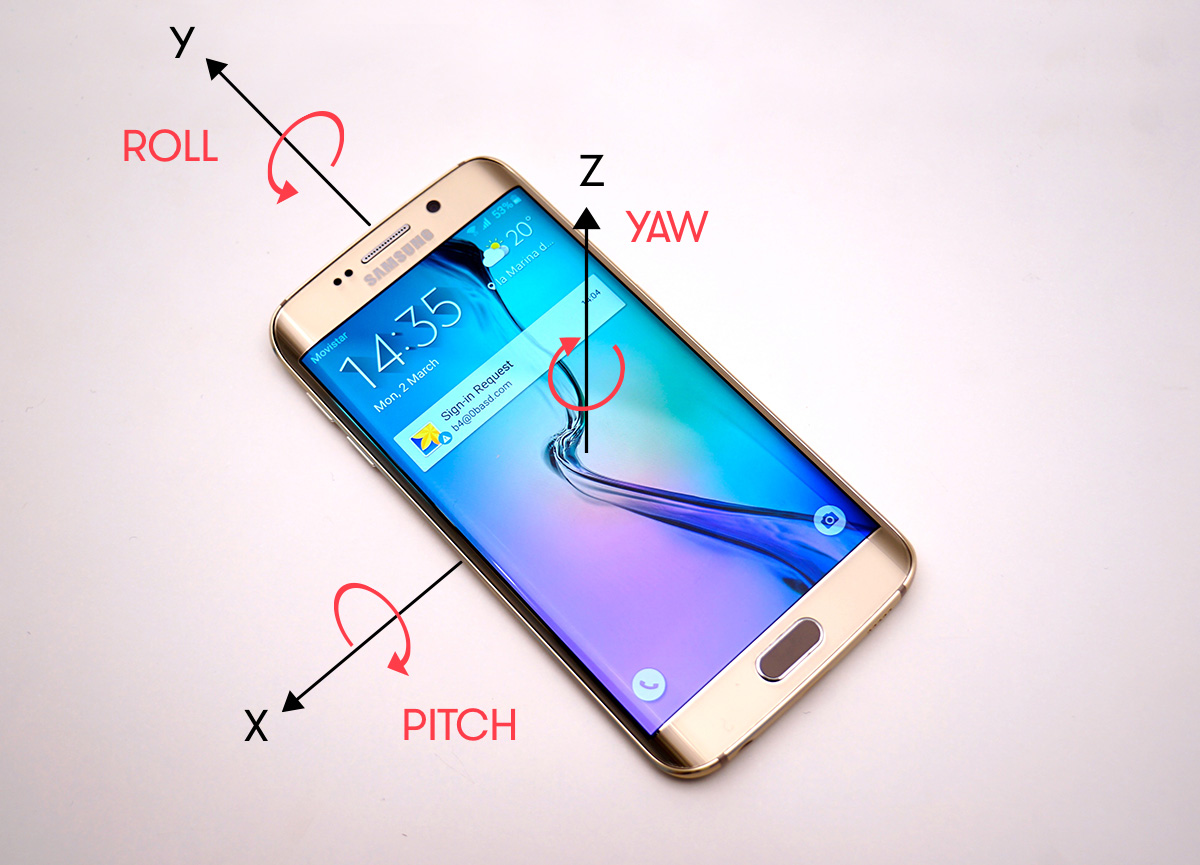
Углы крена, тангажа, рысканияС помощью комбинированного модуля гироскопа и акселерометра можно измерять ориентацию робота в пространстве в углах поворота вокруг трех осей: продольной оси «X» (угол крена), поперечной оси «Y» (угол тангажа), вертикальной оси «Z» (угол рыскания).
Ориентация осей X и Y относительно корпуса указана на плате датчика. «Стрелка» поворота указывает в сторону увеличения угла. Ось «Z» направлено вертикально вверх относительно «лицевой» стороны платы, на которой располагаются все компоненты. Угол поворота вокруг оси увеличивается при повороте по часовой стрелке.
Ориентация осей относительно датчикаИспользование
Подключение
Модуль датчика положения использует интерфейс I2C и подключается к любому из двух соответствующих портов I2C контроллера «Трекдуино».
Схема подключения проводов:
| На датчике | На контроллере (I2C) |
|---|---|
| VCC | 5V |
| GND | GND |
| SCL | SCL |
| SDA | SDA |
Программирование
Блок, необходимые для работы с датчиком, расположены в группе блоков «Датчики» и называется «Положение»
При работе с датчиком положения из текстовой среды необходимо вручную подключать соответствующую библиотеку gyro_accel.h и вызывать функцию калиброки setupAccel() в секции setup():
#include <accel_gyro.h> //подключение библиотеки
void setup()
{
setupAccel();//калибровка. Датчик должен неподвижно располагаться на горизонтальной поверхности.
}
void loop()
{
//ваш код
}
При использовании графического блока эти функции генерируются автоматически.
| Блок и генерируемая им функция | Описание |
|---|---|
float readAccelAngle(char axis, int mode) | Возвращает дробное значение типа float, соответствующее углу поворота по оси. Аргументы: |
Режимы работы
Так как датчик совмещает в себе два устройства (гироскоп и акселерометр), то и выдавать показания он может основаваясь на каждом из них (режимы «только акселерометр» и «только гироскоп»), либо комбинируя эти показания для усреднения и стабилизации (режим «усредненный»)
Режим «Только акселерометр»: углы измеряются только акселерометром на основании измерения вектора силы тяжести.
Плюсы: нет накапливающейся во времени погрешности
Минусы: показания крайне нестабильны, чувствительны к вибрации и боковым ускорениям
Так как основываясь на информации о положении вектора силы тяжести невозможно определить вращение вокруг вертикальной оси Z, при попытке получить показания по оси Z в режиме «только акселерометр» вы всегда будете получать «0». Определение вращения вокруг Z возможно только в режимах «только гироскоп» и «усредненный»
Режим «Только гироскоп»: углы измеряются гироскопом путем измерения угловых скоростей и интегрирования их по времени.
Плюсы: показания стабильны и мало подвержены влиянию случайных ускорений и вибрации
Минусы: ошибка накапливается во времени. Показания зависят от временных промежутков между измерениями. Чем чаще производятся измерения, тем точнее результат.
Режим «Усредненный» (рекомендуется в большинстве случаев): показания обоих датчиков программно комбинируются, взаимно устраняя недостатки друг друга. Показания акселерометра, ошибка в которых не накапливается во времени, «фильтруются» показаниями гироскопа, таким образом скачки в показаниях при случайных ускорениях и вибрации игнорируются.
Плюсы: показания стабильны и мало подвержены влиянию случайных ускорений и вибрации.
Минусы: по оси Z все равно накапливается ошибка, так как для нее используется только гироскоп.
Примеры использования в проектах
Вывод показаний по трем осям в последовательный порт
Генерируемый код:
#include <accel_gyro.h>
void setup()
{
Serial.begin(115200);
setupAccel();
}
void loop()
{
Serial.print("X:");
Serial.print(readAccelAngle('x',FILTERED));
Serial.println();
Serial.print("Y:");
Serial.print(readAccelAngle('y',FILTERED));
Serial.println();
Serial.print("Z:");
Serial.print(readAccelAngle('z',FILTERED));
Serial.println();
delay( 200 );
}
ehlektronika/datchiki/datchik_polozhenija.txt · Последние изменения: 2017/06/05 16:55 (внешнее изменение)
Датчик положения (гироскоп/акселерометр) [Роботрек вики]
ТЕХНИЧЕСКИЕ ХАРАКТЕРИСТИКИ
1) Модель MPU-6050
2) Напряжение питания : от 3.3 до 5.0 В
3) Рабочий ток: < 5 мА
4) Диапазон измеряемых акселерометром ускорений: +/- 2g, +/- 4g, +/- 8g, +/- 16g
5) Диапазон измеряемых гироскопом угловых скоростей: ± 250, 500, 1000, 2000 °/сек
6) Количество осей: 3
7) Интерфейс подключения: 4-проводной I2C
Описание
Углы крена, тангажа, рысканияС помощью комбинированного модуля гироскопа и акселерометра можно измерять ориентацию робота в пространстве в углах поворота вокруг трех осей: продольной оси «X» (угол крена), поперечной оси «Y» (угол тангажа), вертикальной оси «Z» (угол рыскания).
Ориентация осей X и Y относительно корпуса указана на плате датчика. «Стрелка» поворота указывает в сторону увеличения угла. Ось «Z» направлено вертикально вверх относительно «лицевой» стороны платы, на которой располагаются все компоненты. Угол поворота вокруг оси увеличивается при повороте по часовой стрелке.
Ориентация осей относительно датчикаИспользование
Подключение
Модуль датчика положения использует интерфейс I2C и подключается к любому из двух соответствующих портов I2C контроллера «Трекдуино».
Схема подключения проводов:
| На датчике | На контроллере (I2C) |
|---|---|
| VCC | 5V |
| GND | GND |
| SCL | SCL |
| SDA | SDA |
Программирование
Блок, необходимые для работы с датчиком, расположены в группе блоков «Датчики» и называется «Положение»
При работе с датчиком положения из текстовой среды необходимо вручную подключать соответствующую библиотеку gyro_accel.h и вызывать функцию калиброки setupAccel() в секции setup():
#include <accel_gyro.h> //подключение библиотеки
void setup()
{
setupAccel();//калибровка. Датчик должен неподвижно располагаться на горизонтальной поверхности.
}
void loop()
{
//ваш код
}
При использовании графического блока эти функции генерируются автоматически.
| Блок и генерируемая им функция | Описание |
|---|---|
float readAccelAngle(char axis, int mode) | Возвращает дробное значение типа float, соответствующее углу поворота по оси. Аргументы: |
Режимы работы
Так как датчик совмещает в себе два устройства (гироскоп и акселерометр), то и выдавать показания он может основаваясь на каждом из них (режимы «только акселерометр» и «только гироскоп»), либо комбинируя эти показания для усреднения и стабилизации (режим «усредненный»)
Режим «Только акселерометр»: углы измеряются только акселерометром на основании измерения вектора силы тяжести.
Плюсы: нет накапливающейся во времени погрешности
Минусы: показания крайне нестабильны, чувствительны к вибрации и боковым ускорениям
Так как основываясь на информации о положении вектора силы тяжести невозможно определить вращение вокруг вертикальной оси Z, при попытке получить показания по оси Z в режиме «только акселерометр» вы всегда будете получать «0». Определение вращения вокруг Z возможно только в режимах «только гироскоп» и «усредненный»
Режим «Только гироскоп»: углы измеряются гироскопом путем измерения угловых скоростей и интегрирования их по времени.
Плюсы: показания стабильны и мало подвержены влиянию случайных ускорений и вибрации
Минусы: ошибка накапливается во времени. Показания зависят от временных промежутков между измерениями. Чем чаще производятся измерения, тем точнее результат.
Режим «Усредненный» (рекомендуется в большинстве случаев): показания обоих датчиков программно комбинируются, взаимно устраняя недостатки друг друга. Показания акселерометра, ошибка в которых не накапливается во времени, «фильтруются» показаниями гироскопа, таким образом скачки в показаниях при случайных ускорениях и вибрации игнорируются.
Плюсы: показания стабильны и мало подвержены влиянию случайных ускорений и вибрации.
Минусы: по оси Z все равно накапливается ошибка, так как для нее используется только гироскоп.
Примеры использования в проектах
Вывод показаний по трем осям в последовательный порт
Генерируемый код:
#include <accel_gyro.h>
void setup()
{
Serial.begin(115200);
setupAccel();
}
void loop()
{
Serial.print("X:");
Serial.print(readAccelAngle('x',FILTERED));
Serial.println();
Serial.print("Y:");
Serial.print(readAccelAngle('y',FILTERED));
Serial.println();
Serial.print("Z:");
Serial.print(readAccelAngle('z',FILTERED));
Serial.println();
delay( 200 );
}
ehlektronika/datchiki/datchik_polozhenija.txt · Последние изменения: 2017/06/05 16:55 (внешнее изменение)
Датчик положения (гироскоп/акселерометр) [Роботрек вики]
ТЕХНИЧЕСКИЕ ХАРАКТЕРИСТИКИ
1) Модель MPU-6050
2) Напряжение питания : от 3.3 до 5.0 В
3) Рабочий ток: < 5 мА
4) Диапазон измеряемых акселерометром ускорений: +/- 2g, +/- 4g, +/- 8g, +/- 16g
5) Диапазон измеряемых гироскопом угловых скоростей: ± 250, 500, 1000, 2000 °/сек
6) Количество осей: 3
7) Интерфейс подключения: 4-проводной I2C
Описание
Углы крена, тангажа, рысканияС помощью комбинированного модуля гироскопа и акселерометра можно измерять ориентацию робота в пространстве в углах поворота вокруг трех осей: продольной оси «X» (угол крена), поперечной оси «Y» (угол тангажа), вертикальной оси «Z» (угол рыскания).
Ориентация осей X и Y относительно корпуса указана на плате датчика. «Стрелка» поворота указывает в сторону увеличения угла. Ось «Z» направлено вертикально вверх относительно «лицевой» стороны платы, на которой располагаются все компоненты. Угол поворота вокруг оси увеличивается при повороте по часовой стрелке.
Ориентация осей относительно датчикаИспользование
Подключение
Модуль датчика положения использует интерфейс I2C и подключается к любому из двух соответствующих портов I2C контроллера «Трекдуино».
Схема подключения проводов:
| На датчике | На контроллере (I2C) |
|---|---|
| VCC | 5V |
| GND | GND |
| SCL | SCL |
| SDA | SDA |
Программирование
Блок, необходимые для работы с датчиком, расположены в группе блоков «Датчики» и называется «Положение»
При работе с датчиком положения из текстовой среды необходимо вручную подключать соответствующую библиотеку gyro_accel.h и вызывать функцию калиброки setupAccel() в секции setup():
#include <accel_gyro.h> //подключение библиотеки
void setup()
{
setupAccel();//калибровка. Датчик должен неподвижно располагаться на горизонтальной поверхности.
}
void loop()
{
//ваш код
}
При использовании графического блока эти функции генерируются автоматически.
| Блок и генерируемая им функция | Описание |
|---|---|
float readAccelAngle(char axis, int mode) | Возвращает дробное значение типа float, соответствующее углу поворота по оси. Аргументы: |
Режимы работы
Так как датчик совмещает в себе два устройства (гироскоп и акселерометр), то и выдавать показания он может основаваясь на каждом из них (режимы «только акселерометр» и «только гироскоп»), либо комбинируя эти показания для усреднения и стабилизации (режим «усредненный»)
Режим «Только акселерометр»: углы измеряются только акселерометром на основании измерения вектора силы тяжести.
Плюсы: нет накапливающейся во времени погрешности
Минусы: показания крайне нестабильны, чувствительны к вибрации и боковым ускорениям
Так как основываясь на информации о положении вектора силы тяжести невозможно определить вращение вокруг вертикальной оси Z, при попытке получить показания по оси Z в режиме «только акселерометр» вы всегда будете получать «0». Определение вращения вокруг Z возможно только в режимах «только гироскоп» и «усредненный»
Режим «Только гироскоп»: углы измеряются гироскопом путем измерения угловых скоростей и интегрирования их по времени.
Плюсы: показания стабильны и мало подвержены влиянию случайных ускорений и вибрации
Минусы: ошибка накапливается во времени. Показания зависят от временных промежутков между измерениями. Чем чаще производятся измерения, тем точнее результат.
Режим «Усредненный» (рекомендуется в большинстве случаев): показания обоих датчиков программно комбинируются, взаимно устраняя недостатки друг друга. Показания акселерометра, ошибка в которых не накапливается во времени, «фильтруются» показаниями гироскопа, таким образом скачки в показаниях при случайных ускорениях и вибрации игнорируются.
Плюсы: показания стабильны и мало подвержены влиянию случайных ускорений и вибрации.
Минусы: по оси Z все равно накапливается ошибка, так как для нее используется только гироскоп.
Примеры использования в проектах
Вывод показаний по трем осям в последовательный порт
Генерируемый код:
#include <accel_gyro.h>
void setup()
{
Serial.begin(115200);
setupAccel();
}
void loop()
{
Serial.print("X:");
Serial.print(readAccelAngle('x',FILTERED));
Serial.println();
Serial.print("Y:");
Serial.print(readAccelAngle('y',FILTERED));
Serial.println();
Serial.print("Z:");
Serial.print(readAccelAngle('z',FILTERED));
Serial.println();
delay( 200 );
}
ehlektronika/datchiki/datchik_polozhenija.txt · Последние изменения: 2017/06/05 16:55 (внешнее изменение)
Датчик положения (гироскоп/акселерометр) [Роботрек вики]
ТЕХНИЧЕСКИЕ ХАРАКТЕРИСТИКИ
1) Модель MPU-6050
2) Напряжение питания : от 3.3 до 5.0 В
3) Рабочий ток: < 5 мА
4) Диапазон измеряемых акселерометром ускорений: +/- 2g, +/- 4g, +/- 8g, +/- 16g
5) Диапазон измеряемых гироскопом угловых скоростей: ± 250, 500, 1000, 2000 °/сек
6) Количество осей: 3
7) Интерфейс подключения: 4-проводной I2C
Описание
Углы крена, тангажа, рысканияС помощью комбинированного модуля гироскопа и акселерометра можно измерять ориентацию робота в пространстве в углах поворота вокруг трех осей: продольной оси «X» (угол крена), поперечной оси «Y» (угол тангажа), вертикальной оси «Z» (угол рыскания).
Ориентация осей X и Y относительно корпуса указана на плате датчика. «Стрелка» поворота указывает в сторону увеличения угла. Ось «Z» направлено вертикально вверх относительно «лицевой» стороны платы, на которой располагаются все компоненты. Угол поворота вокруг оси увеличивается при повороте по часовой стрелке.
Ориентация осей относительно датчикаИспользование
Подключение
Модуль датчика положения использует интерфейс I2C и подключается к любому из двух соответствующих портов I2C контроллера «Трекдуино».
Схема подключения проводов:
| На датчике | На контроллере (I2C) |
|---|---|
| VCC | 5V |
| GND | GND |
| SCL | SCL |
| SDA | SDA |
Программирование
Блок, необходимые для работы с датчиком, расположены в группе блоков «Датчики» и называется «Положение»
При работе с датчиком положения из текстовой среды необходимо вручную подключать соответствующую библиотеку gyro_accel.h и вызывать функцию калиброки setupAccel() в секции setup():
#include <accel_gyro.h> //подключение библиотеки
void setup()
{
setupAccel();//калибровка. Датчик должен неподвижно располагаться на горизонтальной поверхности.
}
void loop()
{
//ваш код
}
При использовании графического блока эти функции генерируются автоматически.
| Блок и генерируемая им функция | Описание |
|---|---|
float readAccelAngle(char axis, int mode) | Возвращает дробное значение типа float, соответствующее углу поворота по оси. Аргументы: |
Режимы работы
Так как датчик совмещает в себе два устройства (гироскоп и акселерометр), то и выдавать показания он может основаваясь на каждом из них (режимы «только акселерометр» и «только гироскоп»), либо комбинируя эти показания для усреднения и стабилизации (режим «усредненный»)
Режим «Только акселерометр»: углы измеряются только акселерометром на основании измерения вектора силы тяжести.
Плюсы: нет накапливающейся во времени погрешности
Минусы: показания крайне нестабильны, чувствительны к вибрации и боковым ускорениям
Так как основываясь на информации о положении вектора силы тяжести невозможно определить вращение вокруг вертикальной оси Z, при попытке получить показания по оси Z в режиме «только акселерометр» вы всегда будете получать «0». Определение вращения вокруг Z возможно только в режимах «только гироскоп» и «усредненный»
Режим «Только гироскоп»: углы измеряются гироскопом путем измерения угловых скоростей и интегрирования их по времени.
Плюсы: показания стабильны и мало подвержены влиянию случайных ускорений и вибрации
Минусы: ошибка накапливается во времени. Показания зависят от временных промежутков между измерениями. Чем чаще производятся измерения, тем точнее результат.
Режим «Усредненный» (рекомендуется в большинстве случаев): показания обоих датчиков программно комбинируются, взаимно устраняя недостатки друг друга. Показания акселерометра, ошибка в которых не накапливается во времени, «фильтруются» показаниями гироскопа, таким образом скачки в показаниях при случайных ускорениях и вибрации игнорируются.
Плюсы: показания стабильны и мало подвержены влиянию случайных ускорений и вибрации.
Минусы: по оси Z все равно накапливается ошибка, так как для нее используется только гироскоп.
Примеры использования в проектах
Вывод показаний по трем осям в последовательный порт
Генерируемый код:
#include <accel_gyro.h>
void setup()
{
Serial.begin(115200);
setupAccel();
}
void loop()
{
Serial.print("X:");
Serial.print(readAccelAngle('x',FILTERED));
Serial.println();
Serial.print("Y:");
Serial.print(readAccelAngle('y',FILTERED));
Serial.println();
Serial.print("Z:");
Serial.print(readAccelAngle('z',FILTERED));
Serial.println();
delay( 200 );
}
ehlektronika/datchiki/datchik_polozhenija.txt · Последние изменения: 2017/06/05 16:55 (внешнее изменение)
что это, зачем он нужен, как работает —
Средняя оценка0
Сохранить в закладкиСохраненоУдалено 0
Средняя оценка0
Примерно десять лет назад в мобильных устройствах появилась невероятная функция: вы поворачивали корпус устройства, и картинка на экране поворачивалась вслед за ним! Прошло совсем немного времени, и мы массово узнали слово «гироскоп», что это такое, как работает и какие его свойства. Кто еще не разобрался в данном вопросе, мы подробно расскажем в нашей статье.
Гироскоп, это прибор, измеряющий угол наклона некого предмета к земной поверхности. Именно он даёт нам понять, когда смартфон или геймпад наклоняется, и заставляет курсор или картинку на экране реагировать на наклон.
Содержание страницы
Кто и когда изобрёл
Как часто бывает, изобретение это оказалось совсем не новым. В начале XIX века гироскоп изобрёл немецкий физик Иоганн Готтлиб Фридрих фон Боненбергер.
В середине XIX века изобретение Боненбергера доработал француз Фуко – тот самый, создатель знаменитого маятника. Тогдашние приборы использовали сложную систему механической балансировки массивного тела, чтобы оно оставалось на месте. А угол наклона тела по отношению к земной оси можно было измерить по изменению положений опор груза. Таким образом, прибор определял направление движения в пространстве через угол наклона к земной оси.
Принцип работы гироскопа в мобильном устройстве несколько иной: чтобы вписаться в миниатюрный чип, используются специальные конденсаторы, которые считывают смещение кристалла внутри чипа и так измеряют его отклонение от оси.
На сегодняшний день гироскоп в телефоне – вещь обязательная. До этого за определение положения отвечали одни только акселерометры – они худо-бедно справлялись, но, как оказалось, можно и лучше. Сегодня используются комбинированные модули из акселерометра и гироскопа, которые позволяют с высокой точностью отслеживать движения и посылать данные на обработку.
Гиродатчики в смартфонах и планшетах
Начиная с 2010 года, компания Apple снабдила iPhone 4 и последующие модели комбинацией из гироскопа и акселерометра. Такие комбинированные датчики очень хорошо отслеживают изменение положения смартфона или другого устройства (например, фитнес-трекера или умных часов). Чуть позже появился гироскоп в смартфоне на базе Андроид и планшете.
Теперь уже сложно представить себе устройство, не реагирующее на поворот. Наоборот, в моде тонкое управление. Например, вы можете рулить машиной в виртуальных гонках, просто вращая в руках телефон, как «баранку». Когда вы читаете книгу, экран может повернуться вправо или влево, и даже вверх ногами; но если вы выходите на рабочий стол телефона, поворот отключается. А вот планшет того же производителя и с той же версией ОС на поворот отреагирует и превратится в подобие ноутбука. И это только малая часть примеров тонкой настройки. В конце концов, в настройках можно вообще выключить и снова включить гироскоп на Андроиде, если в одних ситуациях он полезен, а в других мешает.
Калибровка
Датчик гироскопа в смартфоне – это ценнейший инструмент, но иногда он сбивается. К счастью, его можно откалибровать заново практически во всех актуальных моделях.
Калибровка гироскопа в Android делается с помощью соответствующих приложений. Чтобы откалибровать навигационный прибор на Андроид, лучше всего воспользоваться сторонним приложением. Дело в том, что разные производители используют несколько разные технологии и разные чипы, поэтому приложение, совместимое со всеми устройствами, должно быть независимым. Мы можем рекомендовать вам приложение Accelerometer Calibration Free. К сожалению, у него нет русскоязычного интерфейса, однако оно достаточно понятно и без перевода.
Apple, совершенно в своей манере, предполагает, что калибровка датчика в iPhone не нужна. Лукавит, конечно. Настроить гироскоп в айфоне бывает просто необходимо.
Для рекалибровки рекомендуют следующий сценарий действий:
- Перезагрузите (выключите и включите) iPhone.
- Запустите приложение «Компас».
- Если калибровка датчиков сбилась, приложение само запустит режим калибровки.
- Наклоняйте iPhone из стороны в сторону, пока круг калибровки не заполнится.
- Когда приложение покажет вам собственно компас, это означает, что прибор откалиброван.
Как включить гиродатчик на Андроид
Для того чтобы включить гироскоп на Андроид нужно выполнить следующие действия:
- Открыть верхнее меню (шторку) в телефоне
- Активировать «Автоповорот». В вашем смартфоне название может отличаться, например, «Книжный экран».
Как проверить, есть ли датчик в смартфоне
Как узнать, есть ли гироскоп в телефоне на Android? Это не сложно, следуйте нашим рекомендациям.
Скачивайте и устанавливайте любое из этих трех приложений, в которых можно посмотреть детально все датчики:
- AnTuTu
- Aida64
- Sensor Sense Toolbox
У смартфонов Apple проще, у всех моделей, начиная с iPhone 4 и выше, датчики гироскопа по умолчанию встроены в плату.
Так выглядит устройство гироскопа в смартфоне:
Что делать, если в смартфоне нет гироскопического прибора
Если нет гироскопа в телефоне, то есть три решения.
- Первый, самый верный, — это купить смартфон с нужным датчиком.
- Про второй и третий вариант смотрите подробное видео (при просмотре не обращайте внимание на голос и дикцию, досмотрите до конца и вы поймете, какой именно способ вам подойдет).
Гироскоп в часах и в фитнес-браслете
Гироскоп в часах – это один из важнейших элементов взаимодействия с миром. Когда вы поднимаете руку с носимым устройством, и в нем включается дисплей – это работает он, родимый. Когда новейшие Apple Watch распознают, что владелец упал и лежит без движения, и вызывают 911 – за спасение своей жизни хозяин должен сказать спасибо этому датчику. Также гироскоп отвечает за фитнес-функции, которые есть во всех современных моделях умных часов.
Он же помогает умному трекеру отследить, как вы ворочаетесь во сне, и оценить качество вашего сна. А более тонкое определение движений помогает распознавать разные виды спорта, которыми вы занимаетесь. Именно гироскоп в фитнес-браслете определяет количество сделанных вами шагов, по тому, как меняется ваше положение во время шага.
Гироскопы в других устройствах
Мы не берём в расчёт применение прибора в транспортных средствах или профессиональных системах навигации. Существуют и относительно небольшие устройства, в которых применяется навигационный прибор. Просто перечислим некоторые из них:
- Геймпады. Современные игровые приставки (Xbox, Playstation) оснащаются контроллерами, которые реагируют на наклон. Это придаёт управлению больше динамики.
- Механические часы. Назвать «массовыми» часики за полмиллиона долларов язык, конечно, не повернётся. Но увидеть, как циферблат в них принимает горизонтальное положение при любом повороте – бесценно.
- Сегвеи. Гироскоп в этих электрических транспортных средствах отвечает за равновесие, а это бесценно, когда вы мчитесь по городским улицам быстрее любого прохожего или даже бегуна.
Вывод
Хотя современные устройства от чистой механики перешли к электронике, принцип гироскопа всё равно остаётся актуальным. За последние годы мы оценили, как облегчают жизнь датчики поворота и движения. И, поверьте, чем умнее и подвижнее становится техника, тем важнее будут сенсоры движения и наклона.
- Была ли полезной информация ?
- ДаНет
— работа, типы и применение
Микроэлектромеханические системы, широко известные как МЭМС, представляют собой технологию очень маленьких электромеханических и механических устройств. Развитие технологии MEMS помогло нам разработать универсальные продукты. Многие механические устройства, такие как акселерометр, гироскоп и т. Д., Теперь могут использоваться с бытовой электроникой. Это стало возможным с помощью технологии MEMS. Эти датчики упакованы так же, как и другие ИС. Акселерометры и гироскопы дополняют друг друга, поэтому их обычно используют вместе.Акселерометр измеряет линейное ускорение или направленное движение объекта, а датчик гироскопа измеряет угловую скорость, наклон или поперечную ориентацию объекта. Также доступны датчики гироскопа для нескольких осей.
Что такое датчик гироскопа?
Датчик гироскопа — это устройство, которое может измерять и поддерживать ориентацию и угловую скорость объекта. Они более совершенные, чем акселерометры. Они могут измерять наклон и поперечную ориентацию объекта, тогда как акселерометр может измерять только линейное движение.
Датчики гироскопатакже называются датчиками угловой скорости или датчиками угловой скорости. Эти датчики устанавливаются в приложениях, где ориентация объекта затруднена для человека.
Угловая скорость, измеряемая в градусах в секунду, — это изменение угла поворота объекта за единицу времени.
Датчик гироскопаПринцип работы датчика гироскопа
Помимо измерения угловой скорости, датчики гироскопа также могут измерять движение объекта.Для более надежного и точного определения движения в бытовой электронике датчики гироскопа сочетаются с датчиками акселерометра.
В зависимости от направления существует три типа измерения угловой скорости. Yaw — горизонтальное вращение на плоской поверхности при взгляде на объект сверху, Pitch — вертикальное вращение при взгляде на объект спереди, Roll — горизонтальное вращение при взгляде на объект спереди.
В датчиках гироскопа используется концепция силы Кориолиса. В этом датчике для измерения угловой скорости скорость вращения датчика преобразуется в электрический сигнал.Принцип работы датчика гироскопа можно понять, наблюдая за работой датчика гироскопа вибрации.
Этот датчик состоит из внутреннего вибрирующего элемента, состоящего из кристаллического материала в форме двойной Т-структуры. Эта конструкция состоит из неподвижной части в центре с прикрепленным к ней «чувствительным рычагом» и «приводным рычагом» с обеих сторон.
Эта двойная Т-образная конструкция симметрична. Когда к приводным рычагам прикладывается переменное вибрационное электрическое поле, возникают непрерывные поперечные колебания.Поскольку приводные рычаги симметричны, когда один рычаг движется влево, другой движется вправо, тем самым нейтрализуя утечки вибраций. Это удерживает неподвижную часть в центре, а чувствительный рычаг остается неподвижным.
При приложении к датчику внешней силы вращения на приводных рычагах возникают вертикальные колебания. Это приводит к вибрации приводных рычагов в направлении вверх и вниз, из-за чего сила вращения действует на неподвижную часть в центре.
Вращение неподвижной части приводит к вертикальным колебаниям чувствительных рычагов.Эти колебания, вызываемые чувствительным рычагом, измеряются как изменение электрического заряда. Это изменение используется для измерения внешней вращающей силы, приложенной к датчику, как углового вращения.
Типы
С развитием технологий производятся высокоточные, надежные и миниатюрные устройства. Более точные измерения ориентации и движения в трехмерном пространстве стали возможны благодаря интеграции датчика гироскопа. Гироскопы также доступны в разных размерах с разными характеристиками.
По размерам датчики гироскопа делятся на малогабаритные и крупногабаритные. От большого к малому иерархия датчиков гироскопа может быть указана как кольцевой лазерный гироскоп, волоконно-оптический гироскоп, жидкостной гироскоп и вибрационный гироскоп.
Компактность и простота использования Вибрационный гироскоп наиболее популярен. Точность вибрационного гироскопа зависит от материала неподвижного элемента, используемого в датчике, и конструктивных отличий. Поэтому производители используют разные материалы и конструкции для повышения точности вибрационного гироскопа.
Типы вибрационного гироскопа
В пьезоэлектрических преобразователях для неподвижной части датчика используются такие материалы, как кристалл и керамика. Здесь для кристаллических материалов используются такие структуры, как двойная Т-образная структура, камертон и Н-образный камертон. При использовании керамического материала выбирают призматическую или столбчатую структуру.
Характеристики датчика вибрационного гироскопа включают масштабный коэффициент, температурно-частотный коэффициент, компактный размер, ударопрочность, стабильность и шумовые характеристики.
Датчик гироскопа в мобильном телефоне
Для облегчения взаимодействия с пользователем в настоящее время в смартфоны встроены различные типы датчиков. Эти датчики также предоставляют телефону информацию об окружающем пространстве, а также помогают продлить срок службы батареи.
Стив Джобс первым применил гироскоп в бытовой электронике. Apple iPhone был первым смартфоном, в котором была установлена сенсорная технология гироскопа. С помощью гироскопа в смартфоне мы можем обнаруживать движение и жесты с помощью наших телефонов.Смартфоны обычно имеют электронную версию датчика вибрационного гироскопа.
Мобильное приложение датчика гироскопа
ПриложениеGyroscope Sensor помогает определять наклон и ориентацию мобильного телефона. Приложение Gyroscope Sensor полезно для старых смартфонов, на которых нет датчика гироскопа.
Приложение, такое как GyroEmu и модуль Xposed, использует акселерометр и магнитометр, имеющиеся на телефоне, для имитации датчика гироскопа. Датчик гироскопа в основном используется на смартфоне для игр в высокотехнологичных играх с дополненной реальностью.
Приложения
Датчики гироскопаиспользуются для различных целей. Кольцевые лазерные гироскопы используются в самолетах и шаттлах-источниках, тогда как оптоволоконные гироскопы используются в гоночных автомобилях и моторных лодках.
Датчики вибрационного гироскопа используются в автомобильных навигационных системах, электронных системах контроля устойчивости транспортных средств, обнаружении движения для мобильных игр, системах обнаружения дрожания камеры в цифровых камерах, радиоуправляемых вертолетах, роботизированных системах и т. Д.
Основными функциями датчика гироскопа для всех приложений являются определение угловой скорости, определение угла и механизмы управления.Размытие изображения в камерах можно компенсировать с помощью системы оптической стабилизации изображения на основе гироскопического датчика.
Понимая их поведение и характеристики, разработчики создают множество эффективных и недорогих продуктов, таких как управление беспроводной мышью на основе жестов, управление креслом-коляской по направлению, система для управления внешними устройствами с помощью команд жестов и т. Д.
Создается много новых приложений, которые меняют способ использования жестов в качестве команд для управления устройствами.Некоторые из доступных на рынке датчиков гироскопа: MAX21000, MAX21001, MAX21003, MAX21100. Какое мобильное приложение. Вы использовали для моделирования датчика гироскопа на своем мобильном телефоне?
гироскопических датчиков — как они работают и что нас ждет впереди | о гироскопическом датчике | Техническая информация | Другая информация
Гироскопические датчики
Гироскопические датчики, также известные как датчики угловой скорости или датчики угловой скорости, представляют собой устройства, измеряющие угловую скорость.
| Угловая скорость |
|---|
| Проще говоря, угловая скорость — это изменение угла поворота в единицу времени. Угловая скорость обычно выражается в градусах в секунду (градусы в секунду). |
Продукты EPSON Gyro
Gyro automotive
Gyro standard
Видео: серия XV7000 для РВК 、 АГВ
Типы гироскопических датчиков
Гироскопические датчикибывают разных типов. Здесь представлены разные типы по размеру и производительности.
В последние годы гироскопические датчики вибрации нашли свое применение в системах обнаружения дрожания камеры для компактных видео- и фотоаппаратов, датчиков движения для видеоигр, а также в системах электронного контроля устойчивости (противоскольжения) транспортных средств, среди прочего.
Ожидается, что в будущем спрос на гироскопы вибрации будет расти в таких областях, как системы безопасности и поддержки водителя транспортных средств, а также управление движением роботов.
Гироскопы EPSON
Автомобильные гироскопы
Стандартные гироскопы
Гироскопические датчики вибрации
Вибрационные гироскопические датчики определяют угловую скорость по силе Кориолиса, приложенной к вибрирующему элементу. По этой причине точность измерения угловой скорости значительно различается в зависимости от материала элемента и конструктивных отличий.Здесь мы кратко опишем основные типы элементов, используемых в вибрационных гироскопических датчиках.
Типы элементов, применяемых в гиродатчиках вибрации
Производители гироскопических датчиков вибрации используют различные материалы и конструкции, пытаясь разработать компактные, высокоточные гироскопические датчики с хорошими характеристиками, в том числе:
• масштабный коэффициент
• температурно-частотный коэффициент
• компактный размер
• ударопрочность
• стабильность
• шумовые характеристики
Гироскопы EPSON
Автомобильные гироскопы
Стандартные гироскопы
Как работает измерение угловой скорости (в датчиках вибрационного гироскопа)
Вибрационные гироскопические датчики определяют угловую скорость по силе Кориолиса, приложенной к вибрирующему объекту.
Здесь мы объясняем, как это работает, на примере кристаллического элемента Epson с двойной Т-структурой.
Гироскопы EPSON
Автомобильные гироскопы
Стандартные гироскопы
Применение гироскопических датчиков
Гиродатчики имеют три основных применения.
| Измерение угловой скорости |
|---|
| Определите величину создаваемой угловой скорости. Используется для измерения самой величины движения. Пример) Проверка спортивного движения |
| Определение угла |
|---|
| Определяет угловую скорость, создаваемую собственным движением датчика. Углы обнаруживаются процессором посредством операций интеграции. Перемещенный угол передается в приложение и отражается в нем. Бывший.) Автомобильные навигационные системы Игровые контроллеры Сотовая связь |
| Механизмы управления |
|---|
| Определяет вибрацию, вызванную внешними факторами, и передает данные о вибрации в виде электрических сигналов на центральный процессор. Используется для корректировки ориентации или баланса объекта. Пример) Коррекция дрожания камеры Управление автомобилем |
Интересные факты
Примеры угловой скорости в приложениях:
• Автомобильные навигационные системы: ~ 10 град / с
• Управление транспортным средством: ~ 30 град / с
• Коррекция дрожания камеры: ~ 100 град / с
• Игровые контроллеры: ~ 300 град / с
• Определение движения лучших игроков в гольф: ~ 3000 град / с
Гироскопы EPSON
Автомобильные гироскопы
Стандартные гироскопы
Примеры приложений
Гироскопические датчики используются во всех изделиях, которые нас окружают.
Продукты EPSON Gyro
Gyro automotive
Gyro standard
Видео: серия XV7000 для РВК 、 АГВ
Как датчик гироскопа работает в вашем смартфоне?
A Гироскоп можно понимать как устройство, которое используется для поддержания опорного направления или обеспечения стабильности в навигации, стабилизаторов и т. Д. Точно так же в вашем смартфоне есть гироскоп или гироскопический датчик для измерения угловой скорости вращения и ускорения.Проще говоря, все эти мобильные игры, в которые мы можем играть, используя чувство движения на наших телефонах, планшетах и т. Д., Происходят благодаря Gyroscope Sense. Точно так же смартфон должен иметь возможность смотреть 360-градусное видео или фотографии. Фотография или видео перемещаются, когда мы перемещаем телефон из-за наличия гироскопа.
Типы датчиков гироскопа
Датчики гироскопа бывают разных видов и типов, имеют разные характеристики и размеры.
Источник изображения — EPSON
Применение гироскопа в смартфоне
Гироскоп в смартфоне предоставляет графический интерфейс, который позволяет пользователю выбирать меню и т. Д., Наклоняя телефон.Телефон можно слегка отклонить, чтобы перемещаться вверх и вниз по списку контактов. Это позволяет смартфону запускать заданные команды различными движениями. Например, можно встряхнуть телефон, чтобы заблокировать его.
- Ответить по телефону / открыть сайт
Гироскопический датчик в вашем телефоне позволяет ответить на звонок или открыть веб-сайт с помощью имеющихся команд, таких как вращение, легкое встряхивание телефона 2–3 раза и т. Д.
Стабилизация изображения — одно из приложений гироскопа в вашем смартфоне, которое предотвращает дрожание руки, которое влияет на качество изображения.Это позволяет телефону записывать действия во время нажатия на кнопку спуска затвора, чтобы сделать снимки более четкими. Устраняет влияние вибрации как на фото, так и на видео.
В случае потери услуги или сети, в туннелях или подземных дорогах, GPS продолжает помогать ориентироваться в автомобиле с помощью гироскопа.
- Управляющая игра с датчиком движения
Компания Apple, выпустившая iPhone 4, сделала Gyroscope ядром motion gaming .Это позволяет разработчику управлять игрой через обнаружение действия. Это позволяет вам использовать свой телефон в качестве рулевого колеса во время управления автомобилем в игре, реактивным самолетом и т. Д. Игра воспроизводит моменты, которые вы делаете со своим телефоном, и, следовательно, управляет играми с чувством движения.
Источник изображения — SEIKO EPSON
Реализации датчика гироскопа в мобильном приложении
- Как обсуждалось ранее, датчик гироскопа может обеспечивать выполнение ряда действий на основе различных наборов движений, выполняемых пользователем, таких как встряхивание телефона для отмены записанного содержимого.
- Датчик гироскопа отвечает за авторотацию экрана и просмотр на экране всякий раз, когда телефон поворачивается.
- Одна из самых больших реализаций гироскопа заключается в том, что он обеспечивает плавное вращение и выполнение нескольких команд в играх с помощью трехмерных движений.
- Гироскоп может обеспечивать точное движение внутри функциональности приложения. Это позволяет пользователю выполнять большинство задач с помощью движения самого устройства.
- Гироскоп фиксирует 6-мерное угловое движение.Это просто означает, что мобильные приложения, разработанные с использованием датчика гироскопа, с большей вероятностью обеспечат привлекательный пользовательский интерфейс, чем приложение без датчика.
Приложения в смартфоне с датчиком гироскопа
Сегодня большинство приложений в смартфоне работают лучше всего, когда в телефоне есть датчик гироскопа. Например, недавно популярная игра Pokemon Go показала, как дополненная реальность добавляет впечатлений от игры, однако, что интересно, AR не будет возможна без гироскопического датчика.Если в вашем телефоне нет хорошего гироскопического датчика, его можно включить с помощью модуля GyroEmu Xposed на любом телефоне Android.
Android-приложения, которые наилучшим образом используют гироскопический датчик
Android-приложения, которые наилучшим образом используют гироскопический датчик:
- AndroSensor
- Анализатор Wi-Fi
- Металлоискатель
- Клинометр
- LightMeter Free
- Умный термометр
- Шумомер
- Пульсометр
- Набор инструментов Physics Toolbox Sensor Suite
приложений для iPhone, которые наилучшим образом используют гироскопический датчик
iPhone Приложения, которые наилучшим образом используют гироскопический датчик
- iBeer
- Время сна
- Sky Views
С каждым днем появляется все больше и больше приложений, творчески использующих гироскопические датчики.Тем не менее, много инноваций делается в области расширенной готовности с гироскопом в смартфонах. Мы очень рады видеть, что будет дальше!
Лучшие смартфоны с датчиком гироскопа
Поскольку гироскопический датчик сегодня является неотъемлемой частью каждого смартфона, ниже приведены некоторые из лучших смартфонов с гироскопическим датчиком, которые вы можете получить.
- iPhone X
- iPhone 8
- Samsung Галактика 8
- LG V20
- Sony Experia XZ
- Google Pixel
- OnePlus 5T
- Huawei Честь 8
- Мото G4
Как использовать датчик гироскопа в Arduino
В этом разделе вы узнаете о датчике гироскопа Arduino.Датчик гироскопа измеряет скорость вращения или скорость изменения углового положения во времени по осям X, Y и Z. В руководстве представлена основная информация о датчике гироскопа и его подключении. протокол. Тогда вы сможете увидеть, как можно работать с датчиком гироскопа. с вашего компьютера с помощью Ozeki 10, продемонстрированного с видео. Итак, начнем прямо сейчас.
Что такое датчик гироскопа?
Гироскоп измеряет скорость вращения или скорость изменения углового положения. с течением времени по осям X, Y и Z.Выходы гироскопа указаны в градусах. в секунду, поэтому для получения углового положения нам просто нужно интегрировать угловую скорость. Вкратце, он может измерять ускорение свободного падения по 3 осям и использовать немного математики тригонометрии, мы можем вычислить угол, под которым расположен датчик
Как работает датчик гироскопа Arduino?
Акселерометр измеряет ускорение в одном направлении, в то время как гироскоп измеряет угловое ускорение по одной оси.Аналоговые пины не устанавливаются. INPUT, потому что это их настройка по умолчанию. Значения, считанные аналоговыми выводами, будут отправлены в последовательный порт. Откройте Serial Monitor, переместите датчик и попробуйте посмотреть, как меняются значения. Акселерометры можно использовать для забавных проектов, например, для создания игрового контроллера.
Как использовать датчик гироскопа Arduino?
Для работы с датчиком гироскопа необходимо подключить четыре провода к ваш Arduino. Вам нужны провода для подключения к земле (Gnd) от гироскопа. Вывод Gnd и второй провод от вывода VCC гироскопа к выводу 5 В на Arduino.Затем вам нужно подключить еще два провода к двум аналоговым входам Arduino (рисунок 1). Первый из этих проводов идет от контакта SCL гироскопа, а второй провод идет от вывода SDA гироскопа.
Схема подключения гироскопаArduino
Рисунок 1 — Схема подключения гироскопа Arduino
Как использовать датчик гироскопа Arduino в Ozeki
Соединения MPU6050 используются для передачи данных акселерометра, гироскопа, угла и температуры с микросхемы MPU6050 в программное обеспечение Ozeki.Вы можете выбрать, что делать дальше с собранной информацией. Например, вы можете перенаправить его на другое соединение или проанализировать в режиме реального времени перед сохранением в базе данных SQL. Чтобы использовать датчик гироскопа в Ozeki, вам сначала необходимо загрузить Ozeki Robot Developer. Озэки Robot Developer установит библиотеки Arduino, необходимые для эффективного использования этого датчика.
Скачать Ozeki Robot Developer
После установки разработчика Ozeki Robot вам необходимо загрузить код управления датчиком гироскопа. к вашему Arduino.Вы можете найти код и инструкции по загрузке на следующих страницах. Процесс загрузки состоит из двух шагов: сначала вам нужно отформатировать EEPROM Arduino, тогда вам нужно загрузить контрольный код. Процедура очень проста, требуется всего лишь несколько секунд.
Загрузите код датчика гироскопа в Arduino Uno
Загрузите код датчика гироскопа в Arduino Mega 2560
Загрузите код датчика гироскопа в Arduino Nano
Загрузите код датчика гироскопа в Raspberry Pi
Датчики Arduino и Ozeki будут обмениваться данными через USB-порт, используя протокол датчика Ozeki Gyroscope.Этот Протокол позволяет вам использовать датчик прямо на вашем ПК. Вы сможете управлять этим датчиком через Интернет. пользовательский интерфейс или вы сможете общаться с ним с помощью Ozeki Chat. Вы можете узнать больше об управлении чатом на следующей странице.
Как общаться с датчиком гироскопа в чате
Важно понимать управление чатом, потому что когда вы создаете робота, вы хотите управлять этим датчиком, отправляя и получая сообщения.если ты откройте приложение Ozeki Robot Developer, вы увидите, кому вы можете написать C # .Net программа для работы с этим датчиком.
Шаги подключения
- Подключите гироскоп к Arduino
- Подключите Arduino к ПК
- Проверьте COM-порты, чтобы убедиться, что ваш Arduino подключен
- Загрузите пример кода в микроконтроллер
- Откройте https: // localhost: 9515 в браузере, чтобы использовать Ozeki 10
- Нажмите на подключение датчика гироскопа
- Настройте датчик с помощью «Автоконфигурации»
- Нажмите «Получить сведения о гироскопе», чтобы проверить датчик.
Обзор системы
Предлагаемая нами система состоит из датчика гироскопа, подключенного к аналоговому порту. вашего Arduino.Arduino будет отвечать за чтение данных с этого устройства. в реальном времени. Мозг системы будет работать на ПК (рисунок 2). На ПК Озэки 10 смогут управлять общением. Вы можете легко запустить Ozeki 10 с помощью веб-браузера.
Рисунок 2 — Системная конфигурация гироскопа, подключенного к ПК с помощью Arduino
Предварительные требования
- MPU6050 (акселерометр и гироскоп)
- Ozeki 10 установлен на вашем компьютере
- Программируемая плата (Arduino Mega / Nano / Uno или Raspberry Pi)
- Требуется USB-кабель между Arduino Mega / Nano / Uno и вашим компьютером
Шаг 1. Подключите гироскоп к Arduino
.Вы можете увидеть, как подключить акселерометр и гироскоп к любой из следующих плат:
Ваш браузер не поддерживает видео тег.
После подключения подключите плату к компьютеру!
Шаг 2 — Загрузите код в микроконтроллер
(Вот код для загрузки)
Ваш браузер не поддерживает видео тег.
Шаг 3 — Запустите Ozeki 10, чтобы попробовать гироскоп
Ваш браузер не поддерживает видео тег.
Шаг 4 — Настройте гироскоп в Ozeki 10
Чтобы настроить датчик гироскопа (подключенный к Arduino) в Ozeki 10, который установлен на вашем компьютере, вам необходимо открыть графический интерфейс пользователя (GUI) Ozeki 10.Вы можете открыть графический интерфейс, введя URL-адрес компьютера в свой веб-браузер. Например, если у нашего ПК IP-адрес 192.168.1.5, мы бы введите http://192.168.1.5:9513 в наш веб-браузер.
Шаг 5 — Изучите протокол датчика гироскопа
Датчик гироскопа может связываться с Озэки через следующий протокол.
Ссылки:
http://www.arduinostarterskit.com
https: // howtomechatronics.com
https://create.arduino.cc
Дополнительная информация
| IC GYROSCOPE YAW RATE 18LGA | $ 20.40000 | 738 — Немедленно | CE Analog Devices Inc. ND | — | Лоток | Активный | Цифровой | X (шаг), Y (рулон) | ± 100 | 200 | — | 20 Гц ~ 480 Гц | SPI | 2.7 В ~ 5 В | 7,8 мА | Регулируемая полоса пропускания, спящий режим | -25 ° C ~ 85 ° C (TA) | 18-LFLGA | |||||||||||||||||||||||||||
| IC GYROSCOPE YAW RATE 32-CBGA 7 | 7 | 7 | 7 | 49,10000 $ | 1,202 — Немедленно | Analog Devices Inc. | Analog Devices Inc. | 1 | ADXRS620BBGZ-RLTR-ND ADXRS620BBGD- ADXRS620BBD-R0003 | — | Tape & Reel (TR) Cut Tape (CT) Digi-Reel® | Active | Аналог | Z (Yaw) | ± 300 | — | 6 | 0 .01 Гц ~ 2,5 кГц | Аналоговое напряжение | 4,75 В ~ 5,25 В | 3,5 мА | Регулируемая полоса пропускания, датчик температуры | -40 ° C ~ 105 ° C (TA) | 32-BFCBGA | |||||||||||||||||||||
| IC GYROSCOPE YAW RATE 32CBGA | $ 48,76000 | 808 — Немедленно | Analog Devices Inc. | Analog Devices Inc. | Активный | Аналог | Z (рыскание) | ± 150 | — | 12.5 | 1 Гц ~ 3 кГц | Аналоговое напряжение | 4,75 В ~ 5,25 В | 3,5 мА | Регулируемая полоса пропускания, датчик температуры | -40 ° C ~ 105 ° C (TA) | 32-BFCBGA | ||||||||||||||||||||||||||||
| IC GYROSCOPE YAW RATE 32-CBGA | $ 49,10000 | 1122 — Немедленно | Analog Devices Inc. | Analog Devices Inc. | Box | Active | Аналог | Z (Yaw) | ± 300 | — | 6 | 0.01 Гц ~ 2,5 кГц | Аналоговое напряжение | 4,75 В ~ 5,25 В | 3,5 мА | Регулируемая полоса пропускания, датчик температуры | -40 ° C ~ 105 ° C (TA) | 32-BFCBGA | |||||||||||||||||||||||||||
| $ 74.21000 | 389 — Немедленно | Murata Electronics | Murata Electronics | 1 | 490-12144-2-ND 490-12144-1-ND 2 490-12144-1-ND2 6-ND | — | Лента и катушка (TR) Cut Tape (CT) Digi-Reel® | Active | Digital | X (шаг) | ± 125 | 50 | — | 1.15 кГц | SPI | 3 В ~ 3,6 В | 23,9 мА | Датчик температуры | -40 ° C ~ 125 ° C (TA) | Модуль 24-SMD | |||||||||||||||||||||||||
| IC GYROSCOPE YAW RATE 32CBGA
| $ 70,08000 | 1000 — Немедленно | Analog Devices Inc. | Analog Devices Inc. | 1 | ADXRS642BBGZ-RLTR-ND ADXRS642 RLTR-ND ADXRS642 ND | — | Tape & Reel (TR) Cut Tape (CT) Digi-Reel® | Active | Аналог | Z (Yaw) | ± 250 | — | 7 | 2 кГц | Аналоговое напряжение | 4.75 В ~ 5,25 В | 3,5 мА | Регулируемая полоса пропускания, датчик температуры | -40 ° C ~ 105 ° C (TA) | 32-BFCBGA | ||||||||||||||||||||||||
| IC GYROSCOPE YAW RATE 32CBGA |
| 211 — Немедленно | Analog Devices Inc. | Analog Devices Inc. | 1 | ADXRS642BBGZ-ND | — | Box Analog | Активный Рыскание) | ± 250 | — | 7 | 2 кГц | Аналоговое напряжение | 4.75 В ~ 5,25 В | 3,5 мА | Регулируемая полоса пропускания, датчик температуры | -40 ° C ~ 105 ° C (TA) | 32-BFCBGA | ||||||||||||||||||||||||||
| IC GYROSCOPE ANGULAR CLCC |
| 0 — Немедленно | Analog Devices Inc. | Analog Devices Inc. | 1 | ADXRS453BEYZ-ND | — | Трубка | Цифровой ), Y (рулон) | ± 300 | 80 | — | 77.5 Гц | SPI | 3,15 В ~ 5,25 В | 6 мА | Температурная компенсация | -40 ° C ~ 105 ° C (TA) | 14-CLCC | ||||||||||||||||||||||||||
| IC GYROSCOPE YAW RATE RATE 32CBGA | $ 103,52000 | 60 — Немедленно | Analog Devices Inc. | Analog Devices Inc. | 1 | ADXRS646BBGZ-ND | — — 9495 Аналоговый | Z (рыскание) | ± 250 | — | 9 | 1 кГц | Аналоговое напряжение | 5.75 В ~ 6,25 В | 4 мА | Датчик температуры | -40 ° C ~ 105 ° C (TA) | 32-BFCBGA | |||||||||||||||||||||||||||
| IC GYROSCOPE YAW RATE 32CBGA | 73 $ 157,89 268 — Немедленно | Analog Devices Inc. | Analog Devices Inc. | 1 | ADXRS646TBGZ-EP-ND | — | Box | Analog Active | ) | ± 250 | — | 9 | 1 кГц | Аналоговое напряжение | 5.75 В ~ 6,25 В | 4 мА | Датчик температуры | -55 ° C ~ 105 ° C (TA) | 32-BFCBGA | ||||||||||||||||||||||||||
| MEMS GYRO Z-AXIS (YAW) 30-CLCC | $ 653.95000 | 89 — Немедленно | Tronics | Tronics | 1 | GYPRO2300LD-ND | GYPRO® |
Tray | ± 300 | 10000 | — | 100 Гц | SPI | 4.75 В ~ 5,25 В | 25 мА | Температурная компенсация | -40 ° C ~ 85 ° C (TA) | 30-CLCC | |||||||||||||||||||||||||||
| ЦИФРОВОЙ ГИРОСКОП УГЛОВОЙ СКОРОСТИ, |
2311 — Немедленно | Rochester Electronics, LLC | Freescale Semiconductor | 132 | 2156-FXAS21002CQR1-ND | — |
| 99 | Цифровой
| 99 Y (крен), Z (рыскание) | ± 250, 500, 1000, 2000 | 16 ~ 128 | — | 4 Гц ~ 256 Гц | I²C, SPI | 1.95 В ~ 3,6 В | 2,7 мА | Регулируемая полоса пропускания, выбор шкалы, спящий режим, датчик температуры | -40 ° C ~ 85 ° C (TA) | Открытая площадка 24-TFQFN | |||||||||||||||||||||||||
| IC GYROSCOPE MEMS SGL LP 10LGA | 3,46000 долл. США | 4739 — Немедленно | STMicroelectronics | STMicroelectronics | 1 Вне акции | -10002 — | Лента и катушка (TR) Cut Tape (CT) Digi-Reel® | Active | Аналог | Z (Yaw) | ± 2000 | — | 0.67 | 140 Гц | Аналоговое напряжение | 2,7 В ~ 3,6 В | 4,2 мА | — | -40 ° C ~ 85 ° C (TA) | 10-TLGA | |||||||||||||||||||||||||
| GYROSCOPE MEMS DUAL AXIS 16-LGA | Устарело | 0 — Немедленно | STMicroelectronics | STMicroelectronics | — Вне акции | 497-89 969-000 -ND 497-8969-6-ND | — | Лента и катушка (TR) Cut Tape (CT) Digi-Reel® | Устарело | Аналог | X (шаг) , Y (рулон) | ± 1500 | — | 0.67 | 140 Гц | Аналоговое напряжение | 2,7 В ~ 3,6 В | 6,8 мА | — | -40 ° C ~ 85 ° C (TA) | 16-LFLGA | ||||||||||||||||||||||||
| GYROSCOPE DUAL AXIS 16-LGA | $ 6.35000 | 175 — Немедленно | STMicroelectronics | STMicroelectronics | 1 Non-Stock | 1803-LPY5150 | 1803-LPY5150 | Лоток Лоток | Устаревший | Аналог | X (шаг), Y (рулон) | ± 1500 | — | 0.67 | 140 Гц | Аналоговое напряжение | 2,7 В ~ 3,6 В | 6,8 мА | — | -40 ° C ~ 85 ° C (TA) | 16-LFLGA | ||||||||||||||||||||||||
| GYROSCOPE MEMS DUAL AXIS 16-LGA | $ 8.40000 | 1,632 — Немедленно | STMicroelectronics | STMicroelectronics | 1 Non-Stock | 9000-2702 497-89 -ND 497-8970-6-ND | — | Лента и катушка (TR) Cut Tape (CT) Digi-Reel® | Устарело | Аналог | X (шаг) , Y (рулон) | ± 500 | — | 2 | 140 Гц | Аналоговое напряжение | 2.7 В ~ 3,6 В | 6,8 мА | — | -40 ° C ~ 85 ° C (TA) | 16-LFLGA | ||||||||||||||||||||||||
| IC GYROSCOPE MEMS DUAL LP 28LGA | $ 8,44000 | $ 8,44000 1,426 — Немедленно | STMicroelectronics | STMicroelectronics | 1 Non-Stock | 497-11078-2-ND 497-11078-1-ND 03 9780002 497-1-ND 03 9780002 497-1 | — | Лента и катушка (TR) Cut Tape (CT) Digi-Reel® | Устарело | Аналог | X (шаг), Y (рулон) | ± 500 | — | 2 | 140 Гц | Аналоговое напряжение | 2.7 В ~ 3,6 В | 6,8 мА | — | -40 ° C ~ 85 ° C (TA) | 28-TFLGA | ||||||||||||||||||||||||
| ГИРОСКОП ОДИНОЧНАЯ ОСЬ 16-LGA | 0003 | 000STMicroelectronics | STMicroelectronics | 1 Вне складских запасов | LY550ALH-ND | — | Поднос | Аналоговый | — | 2 | 140 Гц | Аналоговое напряжение | 2.7 В ~ 3,6 В | 4,8 мА | — | -40 ° C ~ 85 ° C (TA) | 16-LFLGA | ||||||||||||||||||||||||||||
| ГИРО / АКСЕЛЕРОМЕТР 3-ОСЕВОЙ 24QFN | 163 — Немедленно | TDK InvenSense | TDK InvenSense | 1 | 1428-1001-2-ND 1428-1001-1-ND 1428-1001-6-ND | 7 Tape & Reel (TR) Cut Tape (CT) Digi-Reel® | Not for New Designs | Digital | X (шаг), Y (рулон), Z (рыскание) | ± 250, 500, 1000, 2000 | 16.4 ~ 131 | — | 33 кГц (X), 30 кГц (Y), 27 кГц (Z) | I²C | 2,1 В ~ 3,6 В | 6,1 мА | Регулируемая полоса пропускания, выбор шкалы, спящий режим, датчик температуры | -40 ° C ~ 105 ° C (TA) | 24-VFQFN Открытая прокладка | ||||||||||||||||||||||||||
| $ 14,29 000 | 110 — Немедленно | TDK InvenSense | TDK 9481 9481 | 1428-1153-2-ND 1428-1153-1-ND 1428-1153-6-ND | Automotive, AEC-Q100 | Tape & Reel (TR) Cut Tape ( CT) Digi-Reel® | Активный | Цифровой | X (шаг), Y (рулон), Z (рыскание) | ± 250, 500, 1000, 2000 | 16.4 ~ 131 | — | 27 кГц | I²C, SPI | 1,71 ~ 3,6 В | — | Регулируемая полоса пропускания, выбор шкалы, спящий режим, датчик температуры | -40 ° C ~ 85 ° C (TA) | 16-WFLGA Module | ||||||||||||||||||||||||||
| IC GYROSCOPE YAW RATE 32CBGA | $ 48,76000 | 172 — Немедленно | Analog Devices Inc. 505-ADXRS624BBGZ-RLTR-ND 505-ADXRS624BBGZ-RLCT-ND 505-ADXRS624BBGZ-RLDKR-ND | — | TRape & Reel () Лента с лентой Reel® | Активный | Аналоговый | Z (Yaw) | ± 50 | — | 25 | 1 Гц ~ 1 кГц | Аналоговое напряжение | 4.75 В ~ 5,25 В | 3,5 мА | Регулируемая полоса пропускания, датчик температуры | -40 ° C ~ 105 ° C (TA) | 32-BFCBGA | |||||||||||||||||||||||||||
| IC GYROSCOPE YAW RATE 32CBGA |
| 355 — Немедленно | Analog Devices Inc. | Analog Devices Inc. | 1 | ADXRS623BBGZ-RLTR-ND ADXRS623BBGZ-RLC6-ND48K-ND-9-ND — | Tape & Reel (TR) Cut Tape (CT) Digi-Reel® | Active | Аналог | Z (Yaw) | ± 150 | — | 12.5 | 1 Гц ~ 3 кГц | Аналоговое напряжение | 4,75 В ~ 5,25 В | 3,5 мА | Регулируемая полоса пропускания, датчик температуры | -40 ° C ~ 105 ° C (TA) | 32-BFCBGA | |||||||||||||||||||||||||
| ADXRS622 — ГИРОСКОП СКОРОСТИ РЫСКАНИЯ | $ 39,33000 | 2031 — Немедленно | Rochester Electronics, LLC | Analog Devices Inc. | * | Навалом | Активный | — | — | — | — | — | — | — | — | — | — | — | 3— | — | — | 3— | IC GYROSCOPE YAW RATE 32CBGA | 1 608 долл. США.75000 | 3 — Немедленно | Analog Devices Inc. | Analog Devices Inc. | 1 | 505-ADXRS645HDYZ-ND | — |
| Активный аналоговый | X (шаг) или Y (рулон) | ± 2000 | — | 1 | 2 кГц | Аналоговое напряжение | 4,75 В ~ 5,25 В | 3,5 мА | Регулируемая полоса пропускания, датчик температуры | -40 ° C ~ 175 ° C (TA) | 15-TRIIP | ||
| IC GYROSCOPE YAW RATE 32CBGA | $ 48.76000 | 21 — Немедленно | Analog Devices Inc. | Analog Devices Inc. | 1 | ADXRS624BBGZ-ND | — |
| Активный лоток Аналоговый (Рыскание) | ± 50 | — | 25 | 1 Гц ~ 1 кГц | Аналоговое напряжение | 4,75 В ~ 5,25 В | 3,5 мА | Регулируемая полоса пропускания, датчик температуры | -40 ° C ~ 105 ° C (TA) | 32-BFCBGA |
МЭМС-гироскоп обеспечивает прецизионное инерционное зондирование в суровых и высокотемпературных средах
Существует все больше приложений, в которых требуется сбор данных с датчиков, расположенных в условиях очень высоких температур.В последние годы был достигнут значительный прогресс в области полупроводников, пассивных элементов и межсоединений, позволяющих получать и обрабатывать данные с высокой точностью. Однако все еще остаются неудовлетворенные потребности в датчиках, которые могут работать при температурах до 175 ° C, особенно в простом в использовании форм-факторе, обеспечиваемом микроэлектромеханическими системами (MEMS). Датчики MEMS часто меньше, имеют меньшую мощность и более низкую стоимость, чем эквиваленты дискретных датчиков. Кроме того, они также могут интегрировать схемы преобразования сигналов в один и тот же полупроводниковый корпус.
Уже выпущен высокотемпературный МЭМС-акселерометр ADXL206, который обеспечивает высокоточные измерения наклона (наклона). Тем не менее, все еще существует потребность в дополнительных степенях свободы для точного измерения движения системы в суровых условиях окружающей среды, где конечный продукт может подвергаться сильным ударам, вибрации и резкому движению. Этот тип неправильного обращения может вызвать чрезмерный износ и преждевременный выход системы из строя, что повлечет за собой большие затраты на техническое обслуживание или простои.
Чтобы удовлетворить эту потребность, Analog Devices разработала новый высокотемпературный гироскоп для МЭМС со встроенным преобразователем сигнала — ADXRS645.Этот датчик позволяет точно измерять угловую скорость (скорость вращения) даже при наличии ударов и вибрации и рассчитан на работу при температурах до 175 ° C.
Теория работы
ГироскопыMEMS измеряют угловую скорость с помощью ускорения Кориолиса. Эффект Кориолиса можно объяснить следующим образом, начиная с рисунка 1. Представьте, что вы стоите на вращающейся платформе около центра. Ваша скорость относительно земли показана длиной синей стрелки. Если бы вы переместились в точку рядом с внешним краем платформы, ваша скорость увеличилась бы относительно земли, на что указывает более длинная синяя стрелка.Скорость увеличения вашей тангенциальной скорости, вызванная вашей радиальной скоростью, и есть ускорение Кориолиса.
Рис. 1. Пример ускорения Кориолиса. Человек, движущийся на север к внешнему краю вращающейся платформы, должен увеличить составляющую скорости на запад (синие стрелки), чтобы сохранить курс на север. Требуемое ускорение — это ускорение Кориолиса.
Если Ω — угловая скорость, а r — радиус, тангенциальная скорость равна Ωr. Таким образом, если r изменяется со скоростью v, возникает тангенциальное ускорение Ωv.Это половина ускорения Кориолиса. Есть еще половина от изменения направления радиальной скорости, что в сумме дает 2Ωv. Если у вас есть масса (M), платформа должна приложить силу — 2MΩv — чтобы вызвать это ускорение, и масса испытывает соответствующую силу реакции. ADXRS645 использует этот эффект за счет использования резонирующей массы, аналогичной движению человека на вращающейся платформе. Масса микромашиностроена из поликремния и привязана к каркасу из поликремния, так что она может резонировать только в одном направлении.
На рис. 2 показано, что когда резонирующая масса движется к внешнему краю вращения, она ускоряется вправо и оказывает на раму противодействующую силу влево. Когда он движется к центру вращения, он прикладывает силу вправо, как показано зелеными стрелками.
Рис. 2. Демонстрация эффекта Кориолиса в ответ на резонансную кремниевую массу, подвешенную внутри рамки. Зеленые стрелки указывают силу, приложенную к конструкции, в зависимости от состояния резонирующей массы.
Для измерения кориолисового ускорения рама, содержащая резонирующую массу, привязана к подложке пружинами под углом 90 ° относительно резонирующего движения, как показано на рисунке 3. На этом рисунке также показаны сенсорные пальцы Кориолиса, которые используются для определения смещения рама посредством емкостной трансдукции в ответ на силу, действующую со стороны массы.
Рис. 3. Схема механической конструкции гироскопа.
Рисунок 4, который показывает полную конструкцию, демонстрирует, что когда резонирующая масса перемещается и когда поверхность, на которой установлен гироскоп, вращается, масса и ее рама испытывают ускорение Кориолиса и перемещаются на 90 ° относительно вибрационного движения.По мере увеличения скорости вращения изменяется смещение массы и сигнал, полученный из соответствующей емкости. Следует отметить, что гироскоп можно разместить в любом месте вращающегося объекта и под любым углом, если его ось восприятия параллельна оси вращения.
Рис. 4. Рама и резонирующая масса смещаются вбок в ответ на эффект Кориолиса.
Емкостное зондирование
ADXRS645 измеряет смещение резонирующей массы и ее корпуса из-за эффекта Кориолиса с помощью емкостных чувствительных элементов, прикрепленных к резонатору, как показано на рисунке 4.Эти элементы представляют собой кремниевые балки, чередующиеся с двумя наборами неподвижных кремниевых балок, прикрепленных к подложке, таким образом образуя два номинально одинаковых конденсатора. Смещение из-за угловой скорости вызывает в этой системе дифференциальную емкость.
На практике ускорение Кориолиса представляет собой чрезвычайно слабый сигнал, производящий доли Ангстремов отклонения луча и соответствующие изменения емкости порядка зептофарадов. Следовательно, чрезвычайно важно минимизировать перекрестную чувствительность к паразитным источникам, таким как температура, напряжение корпуса, внешнее ускорение и электрический шум.Частично это достигается размещением электроники, включая усилители и фильтры, на том же кристалле, что и механический датчик. Однако более важно проводить дифференциальные измерения как можно дальше в сигнальной цепи и соотносить сигнал со скоростью резонатора, особенно для того, чтобы иметь дело с эффектами внешнего ускорения.
Подавление вибрации
В идеале гироскоп был бы чувствителен только к скорости вращения и ни к чему другому. На практике все гироскопы имеют некоторую чувствительность к ускорению из-за асимметрии их механической конструкции и / или неточностей микрообработки.Фактически, существует множество проявлений чувствительности к ускорению, серьезность которых варьируется от конструкции к конструкции. Наиболее важными обычно являются чувствительность к линейному ускорению (или чувствительность g, ) и устранение вибраций (или чувствительность g, 2 ) и могут быть достаточно серьезными, чтобы полностью снизить номинальную стабильность смещения детали. Выходной сигнал некоторых гироскопов переключается с рельса на рельс, когда входная скорость выходит за пределы номинального диапазона измерений. Другие гироскопы имеют тенденцию блокироваться при воздействии ударов величиной в несколько сотен г .Эти гироскопы не повреждаются ударом, но они больше не реагируют на скорость, и их необходимо выключить и снова включить для перезапуска.
ADXRS645 использует новый подход к измерению угловой скорости, который позволяет отклонять удары силой до 1000 g — он использует четыре резонатора для дифференциального восприятия сигналов и отклонения синфазных внешних ускорений, не связанных с угловым движением. Пары верхнего и нижнего резонаторов на рисунке 5 механически независимы и работают в противофазе.В результате они измеряют одинаковую величину вращения, но выдают выходные сигналы в противоположных направлениях. Следовательно, разница между сигналами датчиков используется для измерения угловой скорости. Это отменяет неротационные сигналы, которые влияют на оба датчика. Сигналы объединяются во внутренней проводке перед предусилителями. Таким образом, экстремальные перегрузки при ускорении в значительной степени предотвращаются от попадания на электронику, тем самым позволяя формированию сигнала сохранять выходную угловую скорость во время сильных ударов.
Рис. 5. Конструкция четырехдифференциального датчика.
Реализация датчика
Упрощенная схема гироскопа и связанных с ним схем возбуждения и считывания показана на рисунке 6.
Рисунок 6. Блок-схема интегрированного гироскопа.
Контур резонатора определяет скорость резонирующей массы, усиливает и приводит в движение резонатор, поддерживая хорошо контролируемую фазу (или задержку) относительно пути прохождения сигнала Кориолиса. Схема Кориолиса используется для обнаружения движения корпуса акселерометра с последующей обработкой сигнала для определения величины ускорения Кориолиса и получения выходного сигнала, соответствующего входной скорости вращения.Кроме того, функция самотестирования проверяет целостность всей сигнальной цепи, включая датчик.
Пример применения
Одна из самых суровых сред для электроники, вероятно, встречается в индустрии скважинного бурения на нефть и газ. Эти системы используют множество датчиков для лучшего понимания движения бурильной колонны под поверхностью, оптимизации операций и предотвращения повреждений. Скорость вращения бурового станка, измеряемая в оборотах в минуту, является ключевым показателем, который оператор буровой установки должен всегда знать.Традиционно это рассчитывалось с помощью магнитометров. Однако магнитометры подвержены помехам со стороны железных материалов, присутствующих в бурильной колонне и окружающей скважине. Они также должны быть размещены в специальных немагнитных утяжеленных бурильных трубах (корпусах).
Помимо простого измерения числа оборотов в минуту, растет интерес к пониманию движения бурильной колонны или динамики бурения для оптимального управления такими параметрами, как величина приложенного усилия, скорость вращения и рулевое управление.Плохо управляемая динамика бурения может привести к высокой вибрации и чрезвычайно неустойчивому движению сверла, что приведет к увеличению времени бурения до целевой зоны, преждевременному выходу оборудования из строя, затруднениям в управлении долотом и повреждению самой скважины. В крайних случаях оборудование может быть сломано и оставлено в колодце, что требует больших затрат на его извлечение.
Один особенно вредный тип движения, возникающий из-за плохого управления параметрами бурения, известен как прерывистое скольжение. Прихват-проскальзывание — это явление, при котором буровое долото застревает, но верх бурильной колонны продолжает вращаться.Когда долото застревает, нижняя часть бурильной колонны разворачивается до тех пор, пока не наберет достаточный крутящий момент, чтобы оторваться, часто с большой силой. Когда это происходит, у бурового долота возникает большой скачок скорости вращения. Прерывистое проскальзывание имеет тенденцию происходить циклически и может длиться в течение длительного периода времени. Типичный отклик числа оборотов при скачкообразном движении показан на Рисунке 7. Поскольку бурильная колонна на поверхности продолжает нормально вращаться, бурильщики часто не подозревают, что это разрушительное явление происходит в скважине.
Рис. 7. Примеры циклического профиля частоты вращения при прерывистом скольжении.
Критически важным измерением для этого приложения является точное измерение скорости вращения вблизи бурового долота с высокой частотой дискретизации. Гироскоп, такой как вибропоглощающий ADXRS645, идеально подходит для этой задачи, поскольку измерение не связано с любым линейным перемещением бурильной колонны. Скорость вращения, рассчитанная с помощью магнитометров, подвержена шумам и ошибкам при высокой вибрации и неустойчивом движении.Решение на основе гироскопа дает мгновенный ответ для скорости вращения и не зависит от пересечения нуля или других алгоритмов, на которые могут повлиять удары и вибрация.
Кроме того, схема на основе гироскопа меньше по размеру и требует меньшего количества компонентов, чем решение феррозондового магнитометра, которое требует нескольких осей магнитометра и дополнительных схем управления. Обработка сигнала интегрирована в ADXRS645. Поддерживающие высокотемпературные ИС для выборки и оцифровки аналогового выхода гироскопа доступны в маломощных корпусах с малым количеством выводов.Схема гироскопа с цифровым выходом, рассчитанная на 175 ° C, может быть реализована с помощью упрощенной сигнальной цепи, показанной на рисунке 8. Полный справочный проект схемы сбора данных доступен на сайте www.analog.com/cn0365.
Рис. 8. Цепь цифрового выходного сигнала гироскопа, рассчитанная на 175 ° C.
Сводка
В этой статье представлен первый гироскоп для МЭМС, рассчитанный на работу при высоких температурах 175 ° C — ADXRS645. Этот датчик позволяет точно измерять угловую скорость в суровых условиях окружающей среды, исключая влияние ударов и вибрации.Гироскоп поддерживается набором высокотемпературных ИС для сбора сигнала для обработки. Для получения дополнительной информации о высокотемпературных продуктах Analog Devices посетите веб-сайт www.analog.com/hightemp.
Новый дизайн гироскопа поможет автономным автомобилям и роботам составить карту мира
Каким бы полезным ни был GPS, это не та система, на которую мы можем полагаться все время. Есть много ситуаций, в которых GPS может быть недоступен, например, когда вы находитесь внутри здания, проезжаете через туннель, на поле битвы, в шахте, под водой или в космосе.
Системы, которым необходимо отслеживать местоположение, например ваш мобильный телефон, автономный автомобиль или подводная лодка, часто используют так называемые инерционные измерительные устройства (комбинацию акселерометров и гироскопов) для оценки положения посредством точного счисления путем отслеживания изменений в ускорении и вращении. . Точность этих оценок местоположения зависит от того, насколько точны датчики в этих IMU. К сожалению, гироскопы, которые могут хорошо отслеживать вращение в течение длительных периодов времени, слишком велики и слишком дороги для большинства коммерческих или потребительских систем.
Исследователи из Мичиганского университета, возглавляемые Халилом Наджафи и финансируемые DARPA, представили на 7-м международном симпозиуме IEEE по инерционным датчикам и системам доклад о новом типе гироскопа, называемом гироскопом с прецизионной интегрирующей оболочкой (PSI), который по словам авторов, он «в 10 000 раз точнее, но всего в 10 раз дороже гироскопов, используемых в обычном сотовом телефоне». Он предлагает производительность гораздо более крупных гироскопов при одной тысячной стоимости, а это означает, что высокоточное определение местоположения, внутренняя навигация и долгосрочная автономия вскоре могут стать гораздо более достижимыми для мобильных устройств и подземных роботов.
Для понимания того, насколько лучше гироскоп PSI, важно понимать, какие характеристики вы получаете от гироскопов, которые почти наверняка есть в вашем мобильном телефоне.
Почему важны гироскопы
В вашем телефоне три гироскопа и три акселерометра, которые объединены в инерциальный измерительный блок (IMU), который может определять как ускорение, так и вращение по всем трем осям. Это ИДУ, вероятно, стоит несколько долларов. Гироскопы в нем имеют чувствительность * порядка 1000 градусов в час, а это означает, что если вы потратите целый час очень медленно, вращая свой телефон, гироскоп заметит, если за это время было три или более оборотов, но если вы повернете телефон немного медленнее, так что он будет вращаться только два раза за час, вращение будет слишком медленным, чтобы гироскоп мог его обнаружить.Это нормально, потому что ваш телефон действительно заботится только о больших и быстрых поворотах (десятки градусов в секунду), например, когда вы поднимаете телефон или переворачиваете его.
Наряду с чувствительностью, существует также точность, или насколько близко вращение, которое измеряет гироскоп, к фактической величине вращения, которое он испытывает. У большинства датчиков есть своего рода смещение точности, которое называется смещением — это то, что датчик видит, когда он должен ничего не видеть, или, в случае гироскопа, то, что он измеряет, когда он вообще не движется.Нет ничего плохого в смещении датчика, если оно стабильно. Если смещение все время одинаково, вы можете откалибровать его и получить точные результаты. Но если смещение нестабильно и меняется непредсказуемо, это действительно ухудшит точность вашего датчика.
Для типичного гироскопа сотового телефона нестабильность смещения составляет от сотен до тысяч градусов в час. Опять же, это нормально, потому что ваш телефон больше ориентирован на измерение десятков или сотен градусов по второй шкале, а это все, что ему нужно для игр или для стабилизации камеры.
Так зачем нам вообще нужны гироскопы с высокой чувствительностью и стабильным смещением? Возможно, это не так актуально для мобильных телефонов, но исключительно важно для подводных лодок, космических кораблей, автономных автомобилей, домашних роботов и всего остального, где вам нужно отслеживать, где вы находитесь, не полагаясь на GPS. Все эти системы используют IMU для отслеживания своего относительного положения, принимая их последнее известное абсолютное положение (из GPS или уже существующей карты или чего-то еще), а затем полагаясь на IMU для объединения непрерывных измерений ускорения и вращения для оценки движения относительно этого точка.
По сути, это просто причудливый метод точного счисления, и, как и любой другой метод точного счисления, со временем накапливаются небольшие ошибки, так что чем дольше вы полагаетесь на него, тем дальше вы отклонитесь от курса. Подводные лодки и космические корабли используют причудливые (и дорогие) гироскопы, полные лазеров и прочего, чтобы минимизировать эти ошибки и результирующий дрейф точности позиционирования, но для наземных роботов, дронов и (в меньшей степени) автономных автомобилей размер, масса и стоимость существенные факторы.Будь то робот, создающий карту в шахте, или автономный автомобиль, проезжающий через туннель, вам нужен чувствительный, точный, доступный и компактный гироскоп одновременно.
Фото: Najafi Group / Мичиганский университет
Именно здесь на помощь приходит гироскоп PSI Мичиганского университета, потому что он маленький, недорогой и в тысячи раз более точный, чем обычный гироскоп для сотового телефона. Секрет такого уровня точности — это сердце гироскопа — резонирующая структура из сверхчистого стекла с металлическим покрытием, которое выглядит почти так же, как перевернутая форма для торта Бундта или перевернутая ванночка для птиц.
Чтобы понять, почему резонатор гироскопа PSI имеет такую форму и как он работает, давайте сначала кратко рассмотрим типы гироскопов, которые есть в вашем телефоне. Это почти наверняка механические вибрационные гироскопы, которые очень маленькие и их легко изготовить с помощью обычных технологий производства полупроводников.
Как работают гироскопы
Вы можете представить ядро этих гироскопов (механический резонатор) как своего рода камертон — одну из тех металлических вещей со стержнем и двумя руками, которые вибрируют (производят звук), когда вы ударяете им о что-нибудь.Особый вид вибрации, который вы получаете при ударе камертона, состоит из кончиков двух рычагов (зубцов), колеблющихся друг от друга (с частотой 440 Гц для стандартной концертной высоты звука) — вот откуда исходит тон.
А что произойдет, если повернуть камертон вокруг длинной оси? Инерция означает, что зубцы хотят продолжать вибрировать в той же плоскости, в которой они начали вибрировать (входная и выходная вибрация), но они не могут, так как основание камертона вращается, и они прикреплены к база.Вместо этого зубцы начинают вибрировать во второй плоскости в дополнение к первой из-за эффекта Кориолиса — того же эффекта, который вы должны учитывать при измерении движения на Земле, потому что Земля вращается.
В любом случае, для вращающейся камертона эффект Кориолиса заставляет кончик каждого зубца начать колебаться вперед и назад (вне плоскости зубцов). Чем больше вращается камертон, тем больше входящая и выходящая вибрация преобразуется в возвратно-поступательную вибрацию за счет эффекта Кориолиса, а это означает, что измерение того, насколько сильно зубцы камертона колеблются взад и вперед, может сказать вам, сколько вращения происходит у основания.
Существует множество различных конструкций этих гироскопов с вибрирующей структурой (иногда называемых кориолисовыми вибрационными гироскопами), и только некоторые из них имеют резонаторы, которые на самом деле выглядят как камертоны, но все они работают примерно одинаково — черт возьми, так чтобы он вибрировал, а затем измерьте, насколько колебания движения вперед и назад преобразуются в колебания вперед и назад, чтобы рассчитать вращение.
Гироскопы для птичьей ванны
Гироскоп PSI не похож на камертон — его резонатор имеет форму кастрюли Бундта или птичьей ванны, более широко называемую формой бокала для вина, что полезно, потому что (по крайней мере для меня) несколько легче представить вибрирующее вино. стакан.Подобно камертону, вы можете ударить по бокалу, и он начнет вибрировать. Если вы посмотрите на бокал сверху, эта вибрация — это слегка деформирующийся край бокала, переходящий от круга к эллипсу. И точно так же, как камертон, если вы поворачиваете бокал для вина, эффект Кориолиса вызывает второй режим смещения вибрации от первого, который вы можете измерить, чтобы вычислить вращение.
Резонатор в форме рюмки намного лучше измеряет вращение, чем резонатор в форме камертона, по нескольким причинам.Во-первых, форма является осесимметричной или симметричной относительно центральной оси. Эта симметрия означает, что два режима вибрации происходят почти с одной и той же частотой, поэтому, когда эффект Кориолиса передает энергию от первого режима ко второму, он очень эффективен, а это означает, что вы получаете больше вибрации на количество вращения, что приводит к более чувствительный гироскоп.
Стеклянные резонаторы также имеют очень высокую «добротность», которая представляет собой безразмерное измерение отношения между количеством энергии, хранящейся в резонаторе, и тем, сколько энергии резонатор теряет каждый раз, когда он колеблется.Когда вы бьете по бокалу, он вибрирует, движется и издает шум. Если бы он продолжал делать это вечно, у него был бы бесконечный Q, но, конечно, он теряет энергию самыми разными способами (акустическими, тепловыми, механическими), поэтому в конце концов он перестанет вибрировать. Добротность высококачественного бокала может составлять несколько тысяч. Типичный гироскоп мобильного телефона имеет добротность в несколько сотен и колеблется гораздо меньше секунды. Резонатор, составляющий ядро гироскопа PSI, имеет добротность 5,1 миллиона (!), Что означает, что после упаковки в вакуум он будет вибрировать в течение 300 секунд после однократного удара.
Причина, по которой высокая добротность важна, заключается в том, что вы хотите, чтобы первичная вибрация вашего резонатора была как можно более чистой, чтобы более эффективно передавать вибрацию из одного режима в другой. Другими характеристиками резонатора, повышающими точность, являются относительно высокая масса и жесткость, что также снижает его подверженность шуму.
В десять тысяч раз лучше
Сложите все это вместе, и нестабильность смещения (точность обнаружения движения) гироскопа PSI будет невероятно низкой 0.0014 градусов в час, что в несколько десятков тысяч раз лучше, чем у обычного гироскопа сотового телефона. Это легко достаточно чувствительно, чтобы обнаружить движение Земли, вращающейся под вашими ногами.
Но, возможно, вам не нужно измерять вращение Земли, поэтому давайте посмотрим, насколько сильно этот гироскоп может иметь значение для автономного автомобиля, пытающегося точно отслеживать себя без GPS.
Предположим, что в этом автомобиле используется IMU с безупречными акселерометрами, но гироскопы такого типа, которые вы обычно найдете в автомобилях (немного лучше, чем в вашем мобильном телефоне).Мы также предположим, что автомобиль едет по плоской поверхности, что означает, что нас интересует только мощность одного гироскопа (рыскание).
Всего за одну минуту движения со скоростью 5o км / ч ошибки, которые накапливаются от стандартного автомобильного гироскопа, приведут к ошибке позиционирования в семь метров. Через пять минут эта позиционная ошибка увеличилась до более чем 850 метров. Но для автомобиля, оснащенного гироскопом PSI, погрешность позиционирования за одну минуту составляет всего два миллиметра, а через пять минут — всего 30 сантиметров, что (для автономного автомобиля) потенциально является разницей между удержанием правильной полосы движения и попаданием в следующий город закончился.Это огромная.
Новый гироскоп с открытым вакуумным пакетом, внутри которого виден резонатор. Фото: Najafi Group / Мичиганский университет
Резонатор гироскопа PSI изготовлен из сверхчистого кварцевого стекла, покрытого электропроводящим слоем. Резонатор переворачивают вверх дном, а затем прикрепляют к стеклянной подложке с помощью центральной насадки. Обод резонатора ни к чему не прикреплен (так что он может резонировать), но есть электроды вокруг внешней стороны обода, которые приводят в движение резонатор (они совершают удары), а также определяют режимы колебаний резонатора, чтобы обнаружить вращение.
Все это упаковано в герметичную коробку размером менее двух сантиметров. Получение высокой добротности, большой массы и высокой жесткости в резонаторе становится намного сложнее при уменьшении масштаба, что является уникальным в гироскопе PSI — это не только сами характеристики, а скорее сочетание производительности и размера. , и стоимость.
Исследователи говорят, что характеристики гироскопа PSI сравнимы с характеристиками тех сверхмощных гироскопов, которые военные используют на подводных лодках, за исключением того, что, хотя они стоят тысячи или десятки тысяч долларов каждый, в объеме производства (> 1 миллиона единиц) PSI гироскопы будут стоить всего 50 долларов каждый.Кроме того, он как минимум в 10 раз меньше, чем эти другие высокопроизводительные гироскопы, что действительно заставляет задуматься, почему кто-то будет продолжать их использовать, как только эти устройства станут коммерчески доступными.
