Как устроен датчик касания EV3. Какие состояния может определять этот датчик. Как программировать робота с использованием датчика касания. Какие интересные задачи можно решать с помощью этого сенсора.
Устройство и принцип работы датчика касания EV3
Датчик касания Lego Mindstorms EV3 представляет собой простое, но эффективное устройство для обнаружения физического контакта робота с объектами окружающей среды. Его основными компонентами являются:
- Кнопка с пружинным механизмом
- Электронная схема для передачи сигнала
- Разъем для подключения к модулю EV3
Принцип работы датчика основан на замыкании электрической цепи при нажатии кнопки. Когда кнопка не нажата, цепь разомкнута. При контакте с препятствием кнопка нажимается, замыкая цепь. Модуль EV3 регистрирует это изменение состояния и может использовать эту информацию в программе управления роботом.
Состояния датчика касания и их определение
Датчик касания EV3 может находиться в трех основных состояниях:

- Нажатие (Pressed) — кнопка датчика нажата
- Отпускание (Released) — кнопка датчика не нажата
- Щелчок (Bumped) — последовательное нажатие и отпускание кнопки
Как определить текущее состояние датчика в программе? Для этого используется блок «Ожидание» (Wait) в режиме «Датчик касания» (Touch Sensor). В настройках блока можно выбрать нужное состояние:
- 0 — Отпускание
- 1 — Нажатие
- 2 — Щелчок
Программа будет ждать наступления выбранного состояния, прежде чем перейти к следующему блоку.
Подключение и настройка датчика касания
Для использования датчика касания в проектах Lego Mindstorms EV3 необходимо выполнить следующие шаги:
- Подключить датчик к одному из четырех входных портов модуля EV3 (1, 2, 3 или 4)
- В программе указать номер порта, к которому подключен датчик
- Выбрать нужный режим работы датчика в настройках программных блоков
Важно помнить, что все входные порты EV3 равнозначны. Датчик касания можно подключать к любому из них, главное — правильно указать номер порта в программе.

Программирование робота с использованием датчика касания
Датчик касания открывает широкие возможности для создания интерактивных роботов, способных реагировать на контакт с окружающими предметами. Рассмотрим несколько базовых примеров программирования с использованием этого сенсора:
Пример 1: Движение робота до препятствия
Задача: робот должен двигаться вперед, пока не коснется препятствия, после чего остановиться.
- Блок «Движение» (Move) — задаем движение вперед
- Блок «Ожидание» (Wait) — ждем нажатия датчика касания
- Блок «Движение» (Move) — останавливаем моторы
Пример 2: Реакция на щелчок датчика
Задача: при щелчке датчика касания робот должен издать звуковой сигнал.
- Блок «Ожидание» (Wait) — ждем щелчка датчика касания
- Блок «Звук» (Sound) — воспроизводим звуковой файл
Применение датчика касания в сложных алгоритмах
Датчик касания может быть эффективно использован в более сложных алгоритмах управления роботом. Например:
- Создание «бампера» для защиты робота от столкновений
- Программирование робота для движения вдоль стены
- Разработка интерактивных игр и головоломок
- Управление механическими манипуляторами
При этом часто датчик касания используется в сочетании с другими сенсорами EV3, такими как ультразвуковой датчик или гироскоп, что позволяет создавать более сложные и интеллектуальные системы управления.

Преимущества и ограничения датчика касания
Как и любой сенсор, датчик касания EV3 имеет свои сильные и слабые стороны. Рассмотрим основные преимущества и ограничения этого устройства:
Преимущества:
- Простота использования и программирования
- Высокая надежность и точность срабатывания
- Низкое энергопотребление
- Компактные размеры
Ограничения:
- Необходимость физического контакта для срабатывания
- Невозможность измерения силы нажатия
- Ограниченный радиус действия
Понимание этих особенностей поможет правильно выбрать задачи, для которых датчик касания будет наиболее эффективен.
Практические советы по работе с датчиком касания
Чтобы максимально эффективно использовать датчик касания в ваших проектах Lego Mindstorms EV3, воспользуйтесь следующими рекомендациями:
- Располагайте датчик таким образом, чтобы обеспечить надежный контакт с препятствиями
- Используйте несколько датчиков касания для более точного определения положения и ориентации робота
- Комбинируйте датчик касания с другими сенсорами для создания более сложных алгоритмов
- Экспериментируйте с различными конструкциями «бамперов» и механических передач для расширения возможностей датчика
Помните, что креативный подход и экспериментирование — ключ к созданию уникальных и эффективных робототехнических проектов.

Использование датчика касания Lego mindstorms EV3
Содержание урока Введение: 4.1. Изучаем первый датчик – датчик касания 4.2. Оранжевая палитра – Управление операторами 4.3. Оранжевая палитра, программный блок «Ожидание»
Введение:
В состав конструктора Lego mindstorms EV3 входят различные датчики. Главная задача датчиков — представлять информацию из внешней среды модулю EV3, а задача программиста — научиться получать и обрабатывать эту информацию, подавая необходимые команды моторам робота. На протяжении ряда уроков мы будем последовательно знакомиться со всеми датчиками, входящими и в домашний, и в образовательный наборы, научимся взаимодействовать с ними и решать наиболее распространенные задачи управления роботом.
4.1. Изучаем первый датчик – датчик касания
Для подключения датчиков к модулю EV3 предназначены порты, обозначенные цифрами «1», «2», «3» и «4». Таким образом, к одному модулю EV3 одновременно можно подключить до четырех различных датчиков. Все порты абсолютно равнозначны и вы можете подключать датчики к любым портам, главное — будьте внимательны при указании номера порта для соответствующих датчиков в ваших программах.
Таким образом, к одному модулю EV3 одновременно можно подключить до четырех различных датчиков. Все порты абсолютно равнозначны и вы можете подключать датчики к любым портам, главное — будьте внимательны при указании номера порта для соответствующих датчиков в ваших программах.
Рис. 1
Первым датчиком, который мы изучим, будет датчик касания (Рис. 2).
Рис. 2
Этот датчик, по сути, представляет собой специальную кнопку, которая может находиться в двух состояниях: «Нажатие» (Рис. 3 поз. 1) или «Освобождение» (Рис. 3 поз. 2). Также, последовательный переход в состояние «Нажатие», а затем «Освобождение» называется: «Щелчок» (Рис. 3 поз. 3) и может обрабатываться программой. как самостоятельное событие.
Рис. 3
4.2. Оранжевая палитра – Управление операторами
Какие же инструменты представляет нам среда программирования для получения информации с датчиков и реагирования на эту информацию в программе? Давайте начнем знакомиться с программными блоками, расположенными в Оранжевой палитре, которая называется «Управление операторами». (Рис. 4)
(Рис. 4)
Рис. 4
Программные блоки Оранжевой палитры, не смотря на свою малочисленность, очень важны! С помощью этих блоков мы можем обрабатывать массу событий и условий и сложно представить практическую программу, которая может обойтись без этих блоков.
- С самым первым блоком Оранжевой палитры мы уже с вами знакомы: он называется «Начало». Именно с него начинаются все программы для роботов.
- Второй программный блок называется «Ожидание». Этот блок заставляет программу ожидать выполнения какого-либо условия или наступления какого-либо события. Пока не выполнится условие, установленное в этом блоке, программа не перейдет к выполнению следующих программных блоков! Если перед тем, как начнется выполнение блока «Ожидание» были включены, какие-либо моторы, то они будут продолжать вращаться с установленной скоростью.
- Третий программный блок называется «Цикл».
 Этот блок многократно выполняет программные блоки, вложенные внутрь его, пока не будет выполнено условие завершения цикла, заданное в настройках блока.
Этот блок многократно выполняет программные блоки, вложенные внутрь его, пока не будет выполнено условие завершения цикла, заданное в настройках блока. - Следующий программный блок называется «Переключатель». Он служит для того, чтобы в зависимости от заданных условий — выполнить одну последовательность программных блоков, вложенных в один из своих контейнеров.
- Заключительный программный блок называется «Прерывание цикла». Его предназначение — досрочное прекращение выполнения заданного цикла.
Программные блоки «Ожидание», «Цикл» и «Переключатель» имеют множество режимов и соответствующих настроек, знакомиться с которыми мы будем на практических примерах, последовательно и с наглядными пояснениями.
4.3. Оранжевая палитра, программный блок «Ожидание»
Перед тем, как приступить к решению практических задач, давайте закрепим датчик касания на нашем роботе, как показано на Рис. 5, и подключим его кабелем к порту «1» модуля EV3.
5, и подключим его кабелем к порту «1» модуля EV3.
Рис. 5
Задача №6: необходимо написать программу, запускающую движение робота по щелчку кнопки.
Решение:
Само условие задачи подсказывает нам возможное решение: перед началом движения — необходимо дождаться нажатия-отпускания кнопки датчика касания. Возьмем программный блок «Ожидание», изменим режим программного блока на «Датчик касания» — «Сравнение» (Рис. 6).
Рис. 6
Как можно увидеть — программный блок «Ожидание» сменил свое отображение! Рядом с песочными часами появилось изображение датчика касания (Рис. 7 поз. 1), помогающее в программе визуально оценивать установленный режим работы. Настройка программного блока «Состояние» задает требуемое состояние датчика, достижение которого прекратит выполнение блока «Ожидание» (Рис.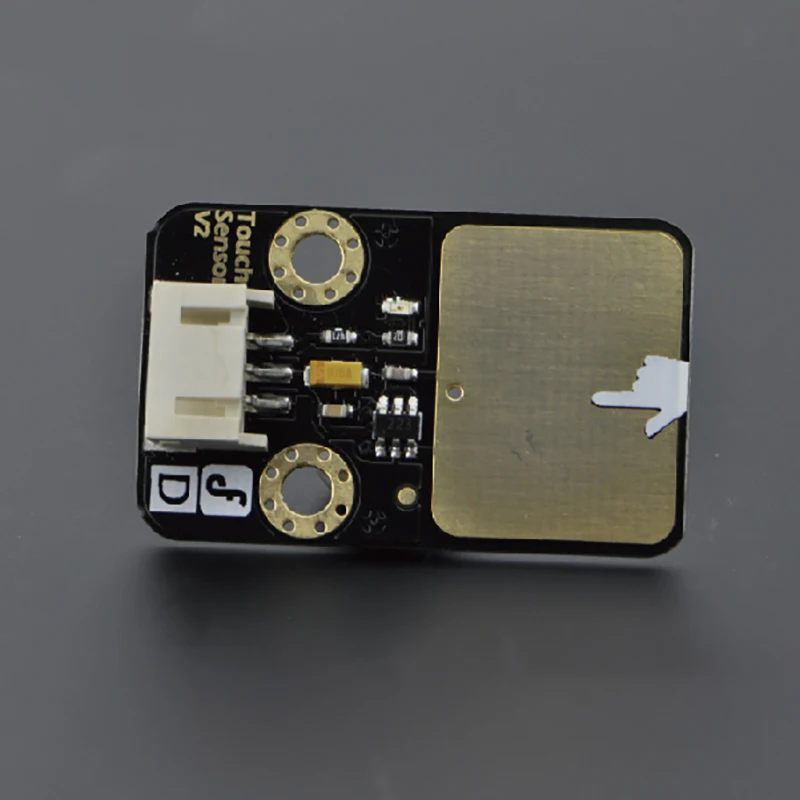 7 поз. 2). Настройка «Состояние» может принимать следующие значение: «0» — «Отпущено», «1» — «Нажатие», «2» — «Щелчок». Для решения нашей задачи выберем состояние «Щелчок». Вывод «Измеренное значение» (Рис. 7 поз. 3) при необходимости позволяет передать окончательное состояние датчика для обработки в другой программный блок.
7 поз. 2). Настройка «Состояние» может принимать следующие значение: «0» — «Отпущено», «1» — «Нажатие», «2» — «Щелчок». Для решения нашей задачи выберем состояние «Щелчок». Вывод «Измеренное значение» (Рис. 7 поз. 3) при необходимости позволяет передать окончательное состояние датчика для обработки в другой программный блок.
Рис. 7
Итак: при такой настройке блока ожидания выполнение нашей программы будет остановлено до нажатия-отпускания кнопки датчика касания. Только после «Щелчка» выполнение будет передано следующему программному блоку. Установим после блока ожидания один программный блок «Рулевое управление», загрузим программу в робота и убедимся в правильности её выполнения! (Рис. 8)
Рис. 8
Задача №7: необходимо написать программу, останавливающую робота, столкнувшегося с препятствием.
Из датчика касания давайте соберем небольшой бампер, который будет нам сигнализировать о том, что наш робот столкнулся с препятствием. Ниже приведены подробные инструкции для сборки, как из домашней, так и из образовательной версии конструктора Lego mindstorms EV3. Можете поэкспериментировать и придумать собственный вариант конструкции.
Lego mindstorms EV3 home
Lego mindstorms EV3 education
Получившийся элемент закрепим на передней балке нашего робота и соединим датчик касания с портом «1» модуля EV3.
Lego mindstorms EV3 Home
Lego mindstorms EV3 Education
Конструкция готова! Приступим к созданию программы. По условию задачи: робот должен двигаться вперед, пока не наткнется на препятствие. В этом случае датчик касания будет нажат! Для решения снова воспользуемся программным блоком «Ожидание».
Решение:
- Начать прямолинейное движение вперед (Рис. 9 поз.
 1).
1). - Ждать, пока датчик касания не будет нажат (Рис. 9 поз. 2).
- Прекратить движение вперед (Рис. 9 поз. 3).
Рис. 9
Для решения следующей задачи нам понадобится программный блок «Цикл» Оранжевой палитры.
Задача №8: необходимо написать программу, заставляющую робота двигаться вперед, при наезде на препятствие — отъезжать назад, поворачивать вправо на 90 градусов и продолжать движение вперед до следующего препятствия.
Подсказка: напишите и протестируйте программу движения — отъезда — поворота, а затем поместите эти блоки внутрь программного блока «Цикл».
Решение Задачи №8 Рис. 10 10 поз.3)
10 поз.3)
Разработка hexapod с нуля (часть 10) — датчики касания / Хабр
Всем привет! Был сделан очередной шаг к реализации алгоритма адаптации к ландшафту. До текущего момента я не мог придумать оптимальное решение для определения состояния ноги: наступила она на землю или нет. И вот спустя пол года я случайно наткнулся на интересный датчик, при помощи которого можно реализовать нужную конструкцию, позволяющую определить не только момент касания ногой земли, а так же усилие.
Этапы разработки:
Часть 1 — проектирование
Часть 2 — сборка
Часть 3 — кинематика
Часть 4 — математика траекторий и последовательности
Часть 5 — электроника
Часть 6 — переход на 3D печать
Часть 7 — новый корпус, прикладное ПО и протоколы общения
Часть 8 — улучшенная математика передвижения
Часть 9 — завершение версии 1.00
Часть 10 — датчики касания
Что? Зачем? Почему?
Для реализации алгоритма адаптации к ландшафту необходимо знать наступила нога на землю или нет. Вариантов реализации этого механизма было несколько, давайте рассмотрим их плюсы и минусы с моей точки зрения:
Тактовая кнопка — решение в лоб.
Плюсы: просто и дешево
Минусы: наличие движущихся частей, необходимых для нажатия на кнопку, а так же для ограничения силы удара по ней во время ходьбы. Мне показалось это не надежнымНемного поясню свои мысли по поводу движущихся частей. Нужно сделать так, чтобы при касании с поверхностью какой-то механизм перемещался вверх-вниз и соответственно давил на кнопку.
 Наличие движущихся пластиковых частей будет слабым местом конструкции. В мусор — мы не выбираем легких путей.
Наличие движущихся пластиковых частей будет слабым местом конструкции. В мусор — мы не выбираем легких путей.Датчики тока. Можно установить на силовые цепи сервоприводов шунты и микросхему для измерения падения напряжения на них. Довольно хорошее решение, которое позволит определять не только касание, но и нагрузку на ногу.
Плюсы: отсутствие какой-либо механики, возможность определения нагрузки и перегрузки приводов, да и в целом полезно знать потребление.
Минусы: глобальное потепление. На шунтах в 0.1Ом и токе 3А будет рассеиваться 0.9Вт, их будет 6 шт (на каждую ногу отдельная линия питания). Соответственно 5.4Вт уходят в никуда.Можно использовать 0.01Ом, но достать их проблемно и стоимость доставки превышает стоимость резисторов. ЧипДип в моем городе просит меня оформить заказ на 4000шт минимум, что явно не подходит.
Места на плате питания не хватает для подобных решений, а если увеличить её размеры, то она не влезет в корпус и про дешевое производство в Китае можно забыть (там размеры прям в притык).

Резистивный датчик давления. Прекрасная идея, но мне они показались довольно хрупкими. Взгляните сами — это же просто пленка с резистивным покрытием
Резистивный датчик давления и одно из его примененийДумаю после нескольких хороших ударов резистивное покрытие начнет разрушаться. В моем случае на ногу действует сила порядка 2кг, и вот каждый раз будет удар по земле с такой силой — уверен помрут они быстро.
К тому же, я не смог придумать красивой реализации этого в плане дизайна.
Тебе не угодишь, всё не нравится! Нет, не всё
Вот решение всех моих проблем — тензодатчик для весов. Мне нравится в нем всё: прочный, чувствительный, есть отверстия для крепежа и можно собрать на коленке MVP для тестов (ардуино и прочее). Набор из 7 тензодатчиков + плат с АЦП к ним обошелся в 1600р с доставкой при покупке в России.
Но не все так гладко. Проблема заключается в направлении силы, прикладываемой к датчику. Допустимое направление показано на картинке ниже, возможно так же обратное. В других направлениях датчик не может определять воздействие ввиду своей конструкции и об этом поподробнее.
В других направлениях датчик не может определять воздействие ввиду своей конструкции и об этом поподробнее.
Тут используется мостовая схема измерений, что вполне логично, т.к. деформация алюминиевого бруска происходит на невероятно маленькие значения (там прям на уровне атомов). В состоянии покоя этот мост должен быть сбалансирован, но в реальном мире без калибровки нуля и расчета offset никуда.
Сами датчики растяжения и сжатия представляют собой тензорезисторы, которые изменяют свое сопротивление при деформации.
Так почему сила должна быть направлена именно в таких направлениях, как было показано ранее? Для примера возьмем упрощенный мост c 2 постоянными резисторами по 50 Ом и 2 тензорезисторами по 50 Ом. Напряжение питания моста возьмем 5В.
В состоянии покоя мост сбалансирован, убедимся в этом (разница между двумя делителями напряжения):
Предположим, что мы деформировали брусок так, что тензорезисторы изменили свое сопротивление на 25 Ом. При этом R1 растянулся (50 + 25 = 75), а R2 сжался (50 — 25 = 25). Погнали считать.
Погнали считать.
Мост разбалансирован и мы получили не только числовое значение деформации, но и её направление. Если деформировать в другом направлении, значение будет положительным.
Если приложить силу сбоку, то тензорезисторы деформируются на одинаковую величину и мост останется сбалансированным. Аналогично будет, если прикладывать силу спереди — оба тензорезистора сожмутся.
Не всё так плохо
Нам нужно лишь направить силу воздействия в нужном направлении и нога гексапода для этого крайне удачно была спроектирована. На картинке ниже красным обозначено направление силы, действующей на ногу. Если разрезать ногу на две части и соединить их алюминиевой балкой, то прикладываемая сила к ноге будет пытаться сжать ногу в «точке сжатия». При этом будет происходить деформация датчика в нужном направлении — он будет работать на излом, а это нам и нужно.
Почему нога спроектирована удачно? Все дело в расположениях точки крепления ноги к приводу и точки опоры\касания к земле — вектор силы (красный) не пересекает её.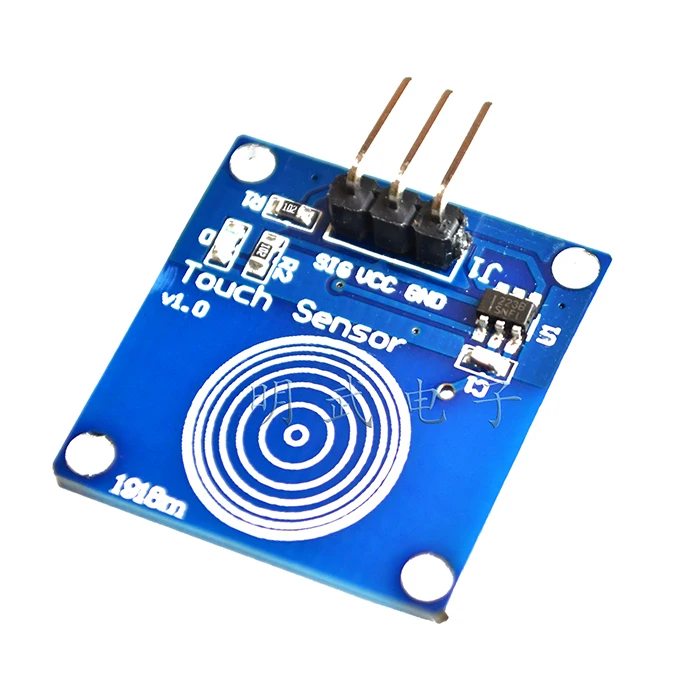 Это получилось случайно и без умысла 🙂
Это получилось случайно и без умысла 🙂
Датчик можно использовать для калибровки сервоприводов. Сейчас нагрузка распределена не на все конечности равномерно из-за неидеального их расположения. Очень сложно накинуть пластиковый диск на все сервы в одинаковом положении, т.к. от диска к диску зубчики располагаются в разных местах.
Диск для сервоприводаЕсть возможность руками в конфигурации сдвигать логический ноль приводов и она используется, но на глаз это делать трудно. Помимо этого вносит свой вклад люфт редуктора привода, вот это компенсировать еще труднее.
При помощи датчика мы можем анализировать силу воздействия на ноги и автоматически сдвигать логический ноль в нужную сторону, компенсируя обе проблемы. Профит!
Реализация
Мне удалось разрезать ногу на 2 половины без ущерба внешнему виду. Мне кажется, что стало даже лучше. Половинки соединяются алюминиевой балкой, сама балка сидит жестко для исключения люфтов и минимизации перекосов.
Сравнение старой и новой ногиВ ноге предусмотрено место, где будет располагаться АЦП для получения значений с тензодатчика. Закрывается всё это счастье крышкой и болтами М2.
Закрывается всё это счастье крышкой и болтами М2.
Расположение АЦП в ноге необходимо для минимизации расстояния до датчика, т.к. там гуляют мВ, то возможно негативное влияние проводов. К тому же не хотелось кидать аналоговые цепи рядом с шестью силовых DC-DC преобразователей.
В качестве АЦП я выбрал HX711. Ну как выбрал, платки были в комплекте. 80Гц частота измерений и максимально простой цифровой интерфейс — самое то. Хотелось бы конечно I2C, а лучше SPI, но увы. Плата имеет на борту дифф. АЦП и всю необходимую обвязку.
С этих АЦП можно более менее синхронно вычитывать данные и начинать конверсию. Судя по даташиту линия SCK позиционируется как Digital Input, а значит их можно свести в одну и посылать по 25 тактов одновременно на все АЦП (используется канал А с усилением 128). Данные будут синхронно приходить на параллельные линии DOUT, что сэкономит временя передачи данных, при этом следующая конверсия будет начинаться одновременно.
О синхронности и почему её нетСинхронность тут условная с допустимой погрешностью и старт конверсии АЦП на самом деле не будет одновременным, т. к. они работают от своих внутренних тактовых генераторов, отклонение частоты которых зависит от множества факторов (температура, фаза луны, количество снега на улице и прочее).
к. они работают от своих внутренних тактовых генераторов, отклонение частоты которых зависит от множества факторов (температура, фаза луны, количество снега на улице и прочее).
Для достижения абсолютной синхронности их как минимум нужно тактировать от одного внешнего генератора. Там целая куча проблем, о которых я знаю и не знаю (всякие паразитные параметры цепей тактирования, их длина и прочее).
Именно по этой причине в процессорах тактирование блоков идет из центра (ЕМНИП), т.к. на высоких частотах начинают влиять законы физики и длина проводника (до дальних блоков импульс доходит позже, чем до близких).
Все упирается в требования — в нашем случае даже 5мс будет приемлемо.
Протокол HX711Под провода сделаны каналы внутри ноги, так что никаких торчащих проводов не будет. Это соответственно защитит их от случайного повреждения.
Тесты
Наконец-то дошли до самого интересного — результаты. Я поставил ногу на гексапод и заставил его немного побегать. После нехитрых манипуляций в Excel получился красивый график.
На графике очень хорошо видны моменты касания, а так же моменты отрыва ноги от земли. Я крайне доволен результатами! Единицы измерения тут неизвестны, к ним применен scale, который имеет магическое значение (запустил пример из библиотеки).
Никакой магии, дай мне бины АЦП! Тут уже другой эксперимент и график соответственно отличается. И вот тут уже другое дело: вместо диапазона 0-500 мы получаем 0-100000, ну разве не прелесть? Как это сочно выглядит. На первой половине графика гексапод встал, на второй пошел.
Всякие мелкие пики это дергания приводов (например 3-й), они там пытаются свои редукторы пнуть в заданное положение более точно, а резиновые наконечники не дают скользить ноге.
Можно заметить, что первые 2 пика меньше, чем 4 последних. Это объясняется тем, что во время подъема гексапод упирается всеми 6 ногами и нагрузка распределяется на все ноги. Во время передвижения на земле всего 3 ноги, соответственно нагрузка на них выше, деформация датчика больше, пики выше.
В прошивке нужно будет определить пики и скорее всего это будет просто пороговая функция. Тут нужны эксперименты, побегать быстро\медленно по мягкой\твердой поверхностях и дальше пошевелить мозгами, выбрав оптимальный порог.
Скорее всего будет 2 режима ходьбы: с адаптацией и без. С адаптацией гексапод будет ходить медленно и как бы прощупывать ландшафт под собой. По крайней мере для начала.
Планы
Вот так понемногу гексапод превратился из фанерного прототипа в технологического монстра с кучей различных датчиков и хитрых алгоритмов. Это радует. Иногда даже не верю, что я смог такое сделать в одиночку.
Для продолжения работы необходимо переделать плату управления. В частности нужно добавить еще один микроконтроллер (STM32F030) для сбора и обработки данных с шести таких датчиков. Дальше главный МК будет забирать из него данные при необходимости по I2C или SPI, я пока еще не определился.
Зачем отдельный МК? Да всё просто. У основного STM32F373 кончились ноги и он без этого хорошо загружен. Пусть там работает только ядро (коммуникация и передвижение), а сбором и обработкой вспомогательной инфы занимается другой МК.
Пусть там работает только ядро (коммуникация и передвижение), а сбором и обработкой вспомогательной инфы занимается другой МК.
Это уже будет четвертый МК на гексаподе: STM32F373 (основной), ESP32 (камера), Ralink (WIFI-UART мост) и STM32F030 (датчики). В три из них нужно заливать прошивку 🙂
Так же нужно добавить акселерометр на плату управления для автоматического выравнивания горизонта.
Еще планирую запихнуть в гексапод полноценный терминал. Там все будет по взрослому: история команд и автозавершение. Сейчас этого сделать нельзя, т.к. нужна дополнительная линия DTR с USB-UART преобразователя для сброса состояния терминала, а нога МК под это не выделена. Конфигурируемых параметров много и ими нужно как-то рулить, желательно через что-нибудь нормальное (сейчас там CLI и это не очень удобно).
Немного фото и видео
ФотоПоколдовал над матаном и получилось увеличить скорость передвижения. На видео ДО и ПОСЛЕ.
Датчик касания презентация, доклад, проект
Датчик касания
Ведение:
В состав конструктора Lego mindstorms EV3 входят различные датчики.
Для подключения датчиков к модулю EV3 предназначены порты, обозначенные цифрами «1», «2», «3» и «4».
Таким образом, к одному модулю EV3 одновременно можно подключить до четырех различных датчиков. Все порты абсолютно равнозначны и вы можете подключать датчики к любым портам, главное — будьте внимательны при указании номера порта для соответствующих датчиков в ваших программах.
Первым датчиком, который мы изучим, будет датчик касания
Этот датчик, по сути, представляет собой специальную кнопку, которая может находиться в двух состояниях:
«Нажатие» или «Освобождение»
Также, последовательный переход в состояние «Нажатие», а затем «Освобождение» называется: «Щелчок и может обрабатываться программой. как самостоятельное событие.
как самостоятельное событие.
Режим измерения
Задача:
Включить мигание красной подсветки ,
если датчик нажат , и непрерывную красную подсветку, если датчик касания не нажат.
Не забудьте поставить паузу,
иначе подсветка никогда не
будет мерцать, так как скорость
Выполнения цикла выше,
Чем скорость мерцания.
Режим сравнения
Режим сравнения позволяет определить три состояния датчика
Кнопка нажата
Не нажата
Произошло нажатие и отпускание кнопки
Режим сравнения
Управление операторами
Какие же инструменты представляет нам среда программирования для получения информации с датчиков и реагирования на эту информацию в программе? Давайте начнем знакомиться с программными блоками, расположенными в Оранжевой палитре, которая называется «Управление операторами».
Программные блоки Оранжевой палитры, не смотря на свою малочисленность, очень важны! С помощью этих блоков мы можем обрабатывать массу событий и условий и сложно представить практическую программу, которая может обойтись без этих блоков.
С самым первым блоком Оранжевой палитры мы уже с вами знакомы: он называется «Начало». Именно с него начинаются все программы для роботов.
Второй программный блок называется «Ожидание». Этот блок заставляет программу ожидать выполнения какого-либо условия или наступления какого-либо события. Пока не выполнится условие, установленное в этом блоке, программа не перейдет к выполнению следующих программных блоков! Если перед тем, как начнется выполнение блока «Ожидание» были включены, какие-либо моторы, то они будут продолжать вращаться с установленной скоростью.
Третий программный блок называется «Цикл». Этот блок многократно выполняет программные блоки, вложенные внутрь его, пока не будет выполнено условие завершения цикла, заданное в настройках блока.
Этот блок многократно выполняет программные блоки, вложенные внутрь его, пока не будет выполнено условие завершения цикла, заданное в настройках блока.
Следующий программный блок называется «Переключатель». Он служит для того, чтобы в зависимости от заданных условий — выполнить одну последовательность программных блоков, вложенных в один из своих контейнеров.
Заключительный программный блок называется «Прерывание цикла». Его предназначение — досрочное прекращение выполнения заданного цикла.
Программные блоки «Ожидание», «Цикл» и «Переключатель» имеют множество режимов и соответствующих настроек, знакомиться с которыми мы будем на практических примерах, последовательно и с наглядными пояснениями
Задача №6: необходимо написать программу, запускающую движение робота по щелчку кнопки.
Решение:
Само условие задачи подсказывает нам возможное решение: перед началом движения — необходимо дождаться нажатия-отпускания кнопки датчика касания. Возьмем программный блок «Ожидание», изменим режим программного блока на «Датчик касания» — «Сравнение»
Возьмем программный блок «Ожидание», изменим режим программного блока на «Датчик касания» — «Сравнение»
Как можно увидеть — программный блок «Ожидание» сменил свое отображение! Рядом с песочными часами появилось изображение датчика касания (Рис. 7 поз. 1), помогающее в программе визуально оценивать установленный режим работы. Настройка программного блока «Состояние» задает требуемое состояние датчика, достижение которого прекратит выполнение блока «Ожидание» (Рис. 7 поз. 2). Настройка «Состояние» может принимать следующие значение: «0» — «Отпущено», «1» — «Нажатие», «2» — «Щелчок». Для решения нашей задачи выберем состояние «Щелчок». Вывод «Измеренное значение» (Рис. 7 поз. 3) при необходимости позволяет передать окончательное состояние датчика для обработки в другой программный блок.
Итак: при такой настройке блока ожидания выполнение нашей программы будет остановлено до нажатия-отпускания кнопки датчика касания. Только после «Щелчка» выполнение будет передано следующему программному блоку. Установим после блока ожидания один программный блок «Рулевое управление», загрузим программу в робота и убедимся в правильности её выполнения!
Только после «Щелчка» выполнение будет передано следующему программному блоку. Установим после блока ожидания один программный блок «Рулевое управление», загрузим программу в робота и убедимся в правильности её выполнения!
Задача №7: необходимо написать программу, останавливающую робота, столкнувшегося с препятствием.
Из датчика касания давайте соберем небольшой бампер, который будет нам сигнализировать о том, что наш робот столкнулся с препятствием. Ниже приведены подробные инструкции для сборки, как из домашней, так и из образовательной версии конструктора Lego mindstorms EV3. Можете поэкспериментировать и придумать собственный вариант конструкции.
Решение:
Начать прямолинейное движение вперед (Ждать, пока датчик касания не будет нажат
Прекратить движение вперед
Для решения следующей задачи нам понадобится программный блок «Цикл» Оранжевой палитры.
Задача №8: необходимо написать программу, заставляющую робота двигаться вперед, при наезде на препятствие — отъезжать назад, поворачивать вправо на 90 градусов и продолжать движение вперед до следующего препятствия.
Подсказка: напишите и протестируйте программу движения — отъезда — поворота, а затем поместите эти блоки внутрь программного блока «Цикл».
Скачать презентацию
Датчики касания и звуковые | 2 Схемы
Содержание
- 1 Модуль датчика касания KY-036
- 2 Модуль датчика звука KY-037
- 3 Модуль датчика звука KY-038
- 4 Выводы
- 5 Полезные ссылки
Это заключительная, шестая часть обзора про различные цифровые датчики для Ардуино платформ. Ранее были выложены обзоры на механические, оптические, магнитные и температурные. Здесь будут рассмотрены датчики звука и касания, чаще всего использующиеся в составе сигнализаций.
Модуль датчика касания KY-036
Модуль, по сути, представляет собой сенсорную кнопку. Как понимает автор, принцип действия устройства основан на том, что, прикасаясь к контакту датчика человек, становится антенной для приема наводок на частоте бытовой сети переменного тока [1-2]. Эти сигналы поступают на компаратор LM393YD
Габариты модуля 42 х 15 х 13 мм, масса 2,8 г., в плате модуля имеется крепежное отверстие диаметром 3 мм. Индикация питания осуществляется светодиодом L1.
При срабатывании датчика загорается (мигает) светодиод L2. Потребляемый ток 3,9 мА в ждущем режиме и 4,9 мА при срабатывании.
Не совсем ясно, какой порог чувствительности датчика должен регулироваться переменным резистором. Данные модули с компаратором LM393YD являются стандартными и к ним припаивают различные датчики, получая, таким образом, модули различного назначения. Выводы питания «G» – общий провод, «+» – питание +5В. На цифровом входе «D0» присутствует низкий логический уровень, при срабатывании датчика на выходе появляется импульсы с частотой 50 Гц. На контакте «A0» присутствует инвертированный относительно «D0» сигнал [2]. В целом модуль срабатывает дискретно, как кнопка, в чем можно убедиться с помощью программы LED_with_button [3].
На контакте «A0» присутствует инвертированный относительно «D0» сигнал [2]. В целом модуль срабатывает дискретно, как кнопка, в чем можно убедиться с помощью программы LED_with_button [3].
Датчик касания позволяет использовать в качестве кнопки управления любую металлическую поверхность, отсутствие движущихся частей должно положительно сказаться на долговечности и надежности.
Модуль датчика звука KY-037
Модуль должен срабатывать от звуков, громкость которых превышает заданный предел. Чувствительным элементом модуля является микрофон, работающий вместе с компаратором на микросхеме LM393YD [4-5].
Габариты модуля 42 х 15 х 13 мм, масса 3,4 г., аналогично предыдущему случаю в плате модуля имеется крепежное отверстие диаметром 3 мм. Индикация питания осуществляется светодиодом L1. Выводы питания «G» – общий провод, «+»– питание +5В.
Потребляемый ток 4,1 мА в ждущем режиме и 5 мА при срабатывании.
На выводе «A0» напряжение изменяется в соответствии уровнем громкости сигналов, принимаемых микрофоном, с повышением громкости показания уменьшаются, в этом можно убедиться с помощью программы AnalogInput2.
На цифровом входе «D0» присутствует низкий логический уровень, при превышении заданного порога низкий уровень меняется на высокий. Порог срабатывания можно регулировать переменным резистором. При этом загорается светодиод L2. При резком громком звуке наблюдается задержка в 1-2 с при обратном переключении.
В целом полезный датчик для организации системы умного дома или сигнализации.
Модуль датчика звука KY-038
С первого взгляда модуль кажется аналогичным предыдущему. Чувствительным элементом модуля является микрофон, следует отметить, что по данному модулю в сети не так уж много информации [6-7].
Габариты модуля 40 х 15 х 13 мм, масса 2,8 г., аналогично предыдущему случаю в плате модуля имеется крепежное отверстие диаметром 3 мм. Индикация питания осуществляется светодиодом L1. Выводы питания «G» – общий провод, «+»– питание +5В.
При срабатывании геркона загорается светодиод L2. Потребляемый ток 4,2 мА в ждущем режиме и до 6 мА при срабатывании.
На выводе «A0» при повышении уровня громкости происходит увеличение показаний (использована программа AnalogInput2).
На контакте «D0» присутствует низкий логический уровень, при срабатывании датчика он меняется на высокий. Порог срабатывания настраивается подстроечным резистором (использована программа LED_with_button).
Этот датчик действительно практически не отличается от предыдущего, но взаимозаменяемость их возможна не всегда, т.к. при изменении уровня громкости характер изменения уровня напряжение на аналоговом выходе различается.
Выводы
На этом автор заканчивает обзор большого набора из различных датчиков для аппаратной платформы Arduino. В целом данный набор произвел на автора смешанное впечатление. В набор входят как достаточно сложные датчики, так и совсем простые конструкции. И если в случае наличия на плате модуля токоограничительных резисторов, светодиодных индикаторов и т.п. автор готов признать полезность подобных модулей, то небольшая часть модулей представляет собой одиночный радиоэлемент на плате. Зачем нужны такие модули, остается непонятным (видимо крепление на стандартных платах служит целям унификации). В целом набор является неплохим способом познакомиться с большинством широко распространенных датчиков, применяемых в Arduino проектах.
Зачем нужны такие модули, остается непонятным (видимо крепление на стандартных платах служит целям унификации). В целом набор является неплохим способом познакомиться с большинством широко распространенных датчиков, применяемых в Arduino проектах.
Полезные ссылки
- http://arduino-kit.ru/catalog/id/modul-datchika-kasaniya
- http://www.zi-zi.ru/module/module-ky036
- http://robocraft.ru/blog/arduino/57.html
- http://arduino-kit.ru/catalog/id/modul-datchika-zvuka
- http://www.zi-zi.ru/module/module-ky037
- http://arduino-kit.ru/catalog/id/modul-datchika-zvuka_
- http://smart-boards.ml/module-audiovideo-4.php
Все файлы и даташиты в архиве (скачать). Автор обзора: Denev.
Полное руководство по сенсорным датчикам
Спрос на интеллектуальные приложения IoT растет, и датчики являются неотъемлемой частью этого процесса. Многие приложения в современном мире IoT учитывают несколько типов сенсорных датчиков, которые можно найти в дисплеях и панелях управления. Поскольку мы видим, что на рынке появилось много мощного оборудования, сочетание этих сенсорных датчиков с высокопроизводительным процессором экспоненциально повышает эффективность конечного продукта.
Поскольку мы видим, что на рынке появилось много мощного оборудования, сочетание этих сенсорных датчиков с высокопроизводительным процессором экспоненциально повышает эффективность конечного продукта.
Сенсорные датчики
обычно используются в робототехнических приложениях, где емкостное или резистивное прикосновение обеспечивает несколько функций для движения робота. Интеграция этих датчиков была замечена в нескольких приложениях от смартфонов, автомобилей и промышленных устройств до игровых консолей и музыкальных инструментов. Перед покупкой сенсорных датчиков важно проверить совместимость датчика с аппаратной платой. Иногда производитель имеет хорошо зарекомендовавшую себя экосистему для дополнительных датчиков, которую можно легко интегрировать и с которой можно поэкспериментировать.
За последние несколько лет стало ясно, что пользовательский интерфейс для любого конечного продукта является наиболее важной частью процесса разработки. Умные лампы и роботы с сенсорным вводом предлагают множество возможностей для новых методов взаимодействия, заменяющих традиционные кнопки и переключатели. В этой статье мы поймем необходимость сенсорных датчиков в вашем приложении и продемонстрируем наши 5 лучших датчиков, которые должны быть на вашем радаре для вашего следующего проекта.
В этой статье мы поймем необходимость сенсорных датчиков в вашем приложении и продемонстрируем наши 5 лучших датчиков, которые должны быть на вашем радаре для вашего следующего проекта.
Что такое сенсорные датчики?
Датчик касания — это электронное устройство, используемое для захвата и обнаружения физического прикосновения пользователя. Это недорогие датчики с улучшенным пользовательским интерфейсом, заменяющие механические переключатели. Некоторые датчики также способны обнаруживать приближение без прямого контакта оператора с датчиком. Проще говоря, прикосновение замыкает цепь, обеспечивающую движение электрона. Разомкнутая цепь замыкается, когда пользователь прикасается к датчику, позволяя течь току. Эти типы датчиков также называются т активные датчики .
Существует две основные категории сенсорных датчиков:
1. Емкостный сенсорный датчик:
Как следует из названия, емкостные датчики прикосновения основаны на емкостной связи, которая обнаруживает все, что проводит электричество или имеет диэлектрик, отличный от воздуха. В нашем случае человеческое тело выступает проводником тока. Эта технология используется в сенсорных дисплеях, используемых в смартфонах или носимых устройствах, где человеческое прикосновение дополняет схему, предлагая определенную функцию.
В нашем случае человеческое тело выступает проводником тока. Эта технология используется в сенсорных дисплеях, используемых в смартфонах или носимых устройствах, где человеческое прикосновение дополняет схему, предлагая определенную функцию.
2. Резистивный датчик касания:
В случае резистивных сенсорных датчиков аппаратное обеспечение состоит из нескольких слоев, в отличие от емкостных сенсорных сенсоров, которые имеют только стеклянный слой. Для резистивных сенсорных датчиков есть два проводящих слоя и непроводящий разделитель, который работает от давления, прилагаемого оператором. При приложении давления внешний слой давит на внутренний слой, что приводит к изменению напряжения. Этот тип сенсора не поддерживает мультисенсорную совместимость и может работать даже в перчатках или стилусом.
5 лучших сенсорных датчиков для проектов IoT
1. Датчик касания Grove:
Если вы планируете использовать что-то из хорошо управляемой экосистемы наборов для разработки Seeed Studio, то этот сенсорный датчик Grove — лучший выбор. Как следует из названия, датчик Touch Sensor совместим с Grove для всех продуктов Seeed Studio, но также может использоваться с одноплатными компьютерами Arduino и Raspberry Pi. Датчик касания Grove основан на интегральной схеме датчика касания TTP223-B.
Как следует из названия, датчик Touch Sensor совместим с Grove для всех продуктов Seeed Studio, но также может использоваться с одноплатными компьютерами Arduino и Raspberry Pi. Датчик касания Grove основан на интегральной схеме датчика касания TTP223-B.
Особенности:
- Интерфейс, совместимый с Grove
- Входное напряжение: 2,0–5,5 В пост. тока
- Максимальное время отклика = 60 мс в быстром режиме, 220 мс в режиме низкого энергопотребления, когда VDD = 3 В
- Низкое энергопотребление
- Модуль из веток 2,0 см x 2,0 см
- Светодиодный индикатор питания
2. Емкостной датчик касания CAP1188:
Как вы можете видеть на изображении выше, эта коммутационная плата емкостного сенсорного датчика CAP1188 от Adafruit может работать с 8 отдельными сенсорными панелями. Аппаратное обеспечение основано на интегральной схеме Microchip CAP1188, которая представляет собой емкостной сенсорный контроллер, обеспечивающий широкий спектр функций кнопок и приближения. Разделительная плата поддерживает как I2C, так и SPI, что упрощает ее использование с любым микроконтроллером на рынке. Ниже приведены характеристики для этого $ 7,95 Сенсорный датчик B/O.
Разделительная плата поддерживает как I2C, так и SPI, что упрощает ее использование с любым микроконтроллером на рынке. Ниже приведены характеристики для этого $ 7,95 Сенсорный датчик B/O.
Особенности:
- Тип интерфейса: SPI, I2C
- Рабочее напряжение питания: 3,3 В
- Размер: 42 мм x 18 мм
- Вес: 2,5 г
- Поставляется с стержнем 0,1-дюймовой жатки
- Доступны библиотека и учебник для Arduino
3. Датчик жестов и касаний:
Наряду с датчиком касания это оборудование также поддерживает распознавание жестов. В обоих случаях функции в одной аппаратной конструкции обеспечивают экономичность и эффективность использования пространства всего за 9 долларов..90. При подключении к микроконтроллеру он может обнаруживать 5-сторонний сенсорный сигнал и 7 видов жестов: движение влево, движение вправо, движение вперед, движение назад, подтягивание вверх, опускание, подтягивание и удаление. Датчики такого типа можно использовать в умных лампах и интерактивных проектах, связанных с распознаванием жестов.
Датчики такого типа можно использовать в умных лампах и интерактивных проектах, связанных с распознаванием жестов.
Особенности:
- Интеграция с Arduino и Raspberry Pis.
- Рабочее напряжение: 3,3–5 В
- Рабочий ток: 56,3 мА
- Ток в спящем режиме: 40 мкА
- Связь: UART
- Размеры: 36×32 мм/1,42*1,26 дюйма
4. Сенсорный датчик с цифровым датчиком силы тяжести:
Цифровой датчик касания крышки гравитации DFRobot — это дополнительный модуль с цифровым интерфейсом для плат Arduino. Это обеспечивает переключатель в одно касание для ваших проектов на основе Arduino. Поскольку это один из лучших сенсорных датчиков для Arduino, производитель также предложил набор из 27 датчиков для Arduino по цене 79 долларов..90.
Особенности:
- Входное напряжение от 3,3 В до 5 В
- Стандартная сборочная конструкция (два отверстия диаметром 3 мм с интервалом, кратным 5 см)
- Легко распознавать интерфейсы датчиков («A» для аналоговых и «D» для цифровых)
- Значки для простой иллюстрации работы датчика
- Высококачественный разъем
- Иммерсионная золотая поверхность
5.
 5-дюймовый емкостный сенсорный дисплей с разрешением 800×480:
5-дюймовый емкостный сенсорный дисплей с разрешением 800×480:
Это оборудование представляет собой емкостный сенсорный USB-дисплей с портом HDMI, успешно протестированный на Raspberry Pi, BeagleBone и даже на Windows 10 и MacBook Pro. Простой в использовании модуль plug-n-play поставляется с разрешением 800×480 и 5-дюймовым дисплеем для различных интеллектуальных приложений IoT. Для отображения прогноза погоды или портативной игровой консоли можно использовать этот высококачественный сенсорный дисплей.
Особенности:
- Разрешение до 800 x 480
- Емкостное сенсорное управление USB
- Бесплатный драйвер, Plug and Play
- поддерживает Raspbian, Ubuntu Mate, NOOBS с Raspberry Pi
- Поддерживает Debian, Angstrom с Beagle Bone
- Поддерживает Windows/Ubuntu/Mac с ПК
- Поддерживает базовый процессор Intel MiniPC
- Подсветка потребления ULP (Ultra Low Power)
Заключительные мысли об интеграции сенсорных датчиков
Интеграция сенсорных датчиков теперь проще, чем когда-либо прежде. С широким распространением интеллектуальных продуктов приоритет отдается пользовательскому опыту; а с недорогими сенсорными датчиками предполагаемое приложение со временем развивается. От промышленной автоматизации до умных городов и даже автомобильных приложений сенсорные датчики были неотъемлемой частью экосистемы.
С широким распространением интеллектуальных продуктов приоритет отдается пользовательскому опыту; а с недорогими сенсорными датчиками предполагаемое приложение со временем развивается. От промышленной автоматизации до умных городов и даже автомобильных приложений сенсорные датчики были неотъемлемой частью экосистемы.
Теперь ваша очередь внедрить эти новые аппаратные датчики в свои проекты и сделать их максимально удобными для пользователей. Мы рады видеть некоторые интересные проекты и обновления от сообщества производителей, чтобы ускорить эру вычислений с открытым исходным кодом.
Ваша очередь: Знакомы ли вы с каким-либо из датчиков, упомянутых выше? Дайте нам знать о своем опыте в разделе комментариев ниже!
Абхишек Джадхав — студент инженерного факультета, внештатный технический писатель, представитель RISC-V и лидер сообщества разработчиков открытого оборудования.
Следовать
Оставить отзыв…
Предыдущий Next
Статьи по теме
Датчики, сенсорные продукты Категория на Adafruit Industries
Код продукта: 182
Этот датчик может обнаруживать изгиб или изгиб в одном направлении. Они были популяризированы благодаря использованию в Nintendo PowerGlove в качестве игрового интерфейса. Эти датчики просты в использовании, они в основном представляют собой резисторы, которые изменяют значение в зависимости от того, насколько они согнуты. Если они не согнуты, сопротивление составляет около ~ 10 кОм. При полном сгибании сопротивление возрастает до…
Код продукта: 1075
FSR — это датчики, которые позволяют обнаруживать физическое давление, сдавливание и вес. Они просты в использовании и имеют низкую стоимость. Этот датчик представляет собой Alpha MF02A-N-221-A01 FSR с площадью чувствительной области 38 мм. Обратите внимание, что этот датчик не может определить, где на квадрате вы нажали (для этого проверьте наши ленточные мягкие потенциометры или емкостную сенсорную панель). FSR — это, по сути, резистор, который…
Обратите внимание, что этот датчик не может определить, где на квадрате вы нажали (для этого проверьте наши ленточные мягкие потенциометры или емкостную сенсорную панель). FSR — это, по сути, резистор, который…
Код продукта: 512
Этот мини-набор упрощает установку джойстика для большого пальца, похожего на PSP/Xbox, на ваш проект. Мини-джойстик — это аналоговый джойстик — более точный и чувствительный, чем просто «направленные» джойстики — с кнопкой «нажмите, чтобы выбрать». Так как он аналоговый, вам потребуются два контакта аналогового считывания на микроконтроллере для определения X и Y. Наличие дополнительного цифрового входа позволит вам…
Код продукта: 419
Введите свой секретный ключ в эту цифровую матричную клавиатуру. Эта клавиатура имеет 12 кнопок, расположенных в сетке телефонных линий 3х4. Он сделан из тонкого гибкого мембранного материала с клейкой основой (просто снимите бумагу), поэтому вы можете прикрепить его практически к чему угодно. Клавиши соединены в матрицу, поэтому вам нужно всего 7 контактов микроконтроллера (3 столбца и 4 ряда) для…
Клавиши соединены в матрицу, поэтому вам нужно всего 7 контактов микроконтроллера (3 столбца и 4 ряда) для…
Код продукта: 1374
Эта коммутационная доска — самый простой способ создать проект с одним «мгновенным» емкостным сенсорным датчиком. Здесь не требуется микроконтроллер — просто включите питание от 1,8 до 5,5 В постоянного тока и коснитесь панели, чтобы активировать датчик. Когда обнаруживается емкостная нагрузка (например, человек касается области сенсорной панели), загорается красный светодиод, а на выходном контакте появляется высокий уровень. Вы также можете…
Код продукта: 1070
Этот датчик может обнаруживать изгиб или изгиб в одном направлении. Они были популяризированы благодаря использованию в Nintendo PowerGlove в качестве игрового интерфейса. Эти датчики просты в использовании, они в основном представляют собой резисторы, которые изменяют значение в зависимости от того, насколько они изгибаются. Если они не согнуты, сопротивление составляет около 25 кОм. При полном сгибании сопротивление возрастает до…
При полном сгибании сопротивление возрастает до…
Код продукта: 1362
Эта разделительная доска — самый простой способ создать проект с несколькими емкостными сенсорными датчиками. Здесь не требуется микроконтроллер — просто подайте питание от 1,8 до 5,5 В постоянного тока и подключите до 5 проводящих площадок к 5 левым контактам. При обнаружении емкостной нагрузки (например, человек прикасается к одному из токопроводящих контактов) загорается соответствующий светодиод справа и…
Код продукта: 1602
Добавьте множество сенсорных датчиков к своему следующему микроконтроллерному проекту с помощью этой простой в использовании 8-канальной платы с емкостными сенсорными датчиками, в которой главную роль играет CAP1188. Этот чип может работать с 8 отдельными сенсорными панелями и имеет очень приятную особенность, которая выделяет его для нас: он зажигает 8 встроенных светодиодов, когда срабатывает соответствующий сенсорный датчик, чтобы помочь вам отладить. ..
..
Код продукта: 178
Эти милые ленточные контроллеры производства Spectra Symbol (также известные как «мягкие потенциометры») с клейкой основой. Два внешних провода имеют номинальное сопротивление 10 кОм. Сопротивление среднего штифта по отношению к любому из внешних штифтов изменяется в зависимости от того, где на полосе происходит нажатие. При отсутствии давления средний штифт…
Код продукта: 1375
Эта коммутационная доска — самый простой способ создать проект с одним емкостным сенсорным датчиком «тумблер». Здесь не требуется микроконтроллер — просто включите питание от 1,8 до 5,5 В постоянного тока и коснитесь панели, чтобы активировать датчик. Этот датчик представляет собой переключаемый тип вывода: касание, затем отключение. Это означает, что при обнаружении емкостной нагрузки (например, человек касается сенсорной панели…
Код продукта: 1982
Добавьте множество сенсорных датчиков к своему следующему микроконтроллерному проекту с помощью этой простой в использовании 12-канальной коммутационной платы с емкостными сенсорными датчиками, в которой главную роль играет MPR121.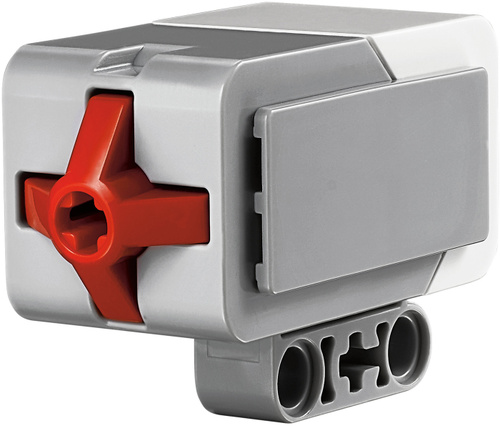 Этот чип может обрабатывать до 12 отдельных тачпадов. MPR121 поддерживает только I2C, что может быть реализовано практически с любым микроконтроллером. Вы можете выбрать один из 4 адресов с контактом ADDR, всего…
Этот чип может обрабатывать до 12 отдельных тачпадов. MPR121 поддерживает только I2C, что может быть реализовано практически с любым микроконтроллером. Вы можете выбрать один из 4 адресов с контактом ADDR, всего…
Код продукта: 1071
FSR — это датчики, которые позволяют определять физическое давление, сдавливание и вес. Они просты в использовании и имеют низкую стоимость. Этот датчик представляет собой модель Interlink 408 FSR с массивной сенсорной областью размером 1/4 дюйма x 24 дюйма. Вы можете нажать в любом месте вдоль полосы, и давление будет распознано. Обратите внимание, что этот датчик не может определить, где на полосе вы нажали (для этого проверьте…
Код продукта: 245
Наш 2-осевой джойстик можно использовать для добавления аналогового ввода в ваш следующий проект. 2-осевой джойстик содержит два независимых потенциометра (по одному на ось) для сообщения о положении джойстика с вариантами подключения для выхода напряжения или сопротивления.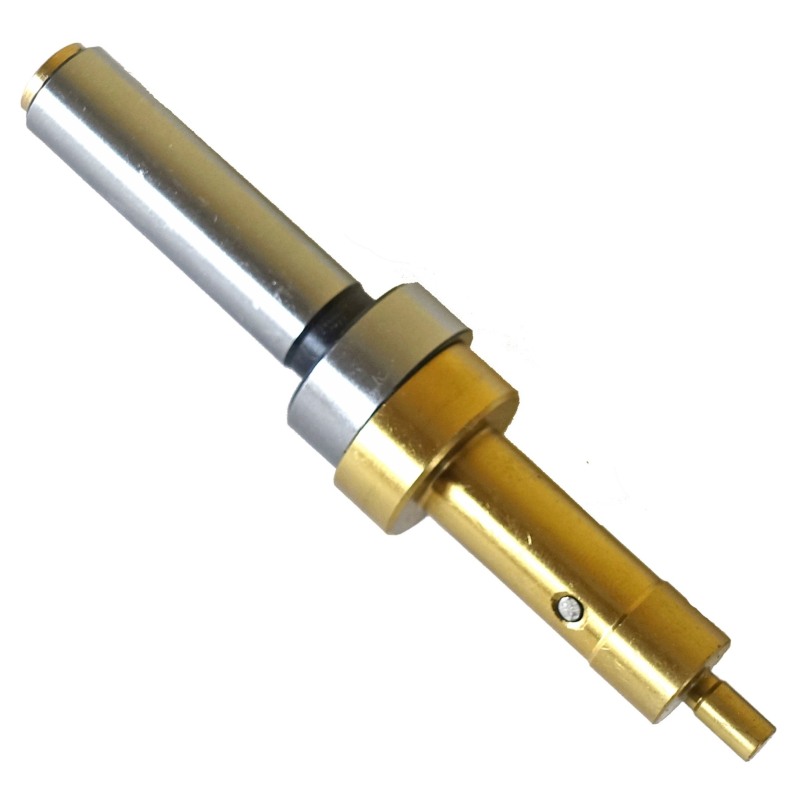 Модульный форм-фактор позволяет подключать 2-осевой джойстик непосредственно к макетной плате для упрощения прототипирования. 2-осевой…
Модульный форм-фактор позволяет подключать 2-осевой джойстик непосредственно к макетной плате для упрощения прототипирования. 2-осевой…
Код продукта: 1332
Введите свой секретный ключ в эту цифровую мембранную клавиатуру. Эта клавиатура имеет 4 кнопки, и, поскольку каждая клавиша имеет свой собственный провод, матричный код не требуется — просто относитесь к ним как к повседневным переключателям. Мембрана мягкая и имеет съемную бумажную подложку для доступа к сильному клею, поэтому вы можете приклеить ее к корпусу и пропустить кабель через прорезь. Это просто…
Код продукта: 1069
Эти милые ленточные контроллеры производства Spectra Symbol (также известные как «мягкие потенциометры») с клейкой основой. Эта форма представляет собой круглый мягкий потенциометр с чувствительной областью в форме пончика, внешний диаметр которой составляет 55,9 мм.6 мм/2,2 дюйма и внутренний диаметр 35,63 мм/1,4 дюйма. Два внешних провода имеют номинальное сопротивление 10 кОм. Средний штифт…
Средний штифт…
Код продукта: 333
Хотите покритиковать ваши проекты? Этот резистивный сенсорный экран можно использовать с помощью стилуса или кончика пальца, и его легко использовать с микроконтроллером. Вы можете наложить его на бумажную накладку для сенсорной панели управления или прикрепить к ЖК-дисплею, чтобы сделать сенсорный дисплей своими руками. Габаритные размеры 2,45 x 3 дюйма (62 мм x 76 мм), толщина 1,2 мм. Диагональ активной области 3,7″, 95мм. 600 Ом через X…
Код продукта: 423
Ваши друзья, вероятно, говорят вам, что у вас «хорошо работают руки», но теперь вы также можете хорошо работать ногами! Этот ножной переключатель сделан из прорезиненного пластика, он достаточно прочный, чтобы выдержать любое количество ударов, и содержит мгновенный переключатель. Вы можете использовать переключатель как «нормально открытый» или «нормально закрытый». К выключателю подключен кабель длиной 2 метра, поэтому…
Код продукта: 444
Добавьте к своему проекту крошечный джойстик с помощью этого джойстика для PSP. Это сменный компонент для PSP1000, но мы думаем, что он станет отличным небольшим дополнением к джойстику/джойстику для носимых или портативных устройств. Джойстик представляет собой «самоцентрирующийся» аналоговый тип. Это означает, что он в основном действует как два потенциометра 10K, один для вверх/вниз, а другой для левого/правого….
Это сменный компонент для PSP1000, но мы думаем, что он станет отличным небольшим дополнением к джойстику/джойстику для носимых или портативных устройств. Джойстик представляет собой «самоцентрирующийся» аналоговый тип. Это означает, что он в основном действует как два потенциометра 10K, один для вверх/вниз, а другой для левого/правого….
Код продукта: 342
Это универсальный контроллер Wii Nunchuck, мы не пробовали его с Wii, но он отлично работает с экраном видеоигр и всем кодом микроконтроллера, который мы пробовали. Может прийти в белом или черном цвете. Мы предлагаем приобрести разделительную доску Nunchucky, если вы хотите использовать ее в проекте по электронике. Внутри есть 3-осевой акселерометр, а также резистивный 2-осевой…
ID продукта: 1824
Эй, Дженни, у меня есть твой номер! И я наберу 867-5309в эту очень красивую матричную клавиатуру в телефонном стиле. Эта клавиатура имеет 12 кнопок, расположенных в сетке телефонных линий 3х4.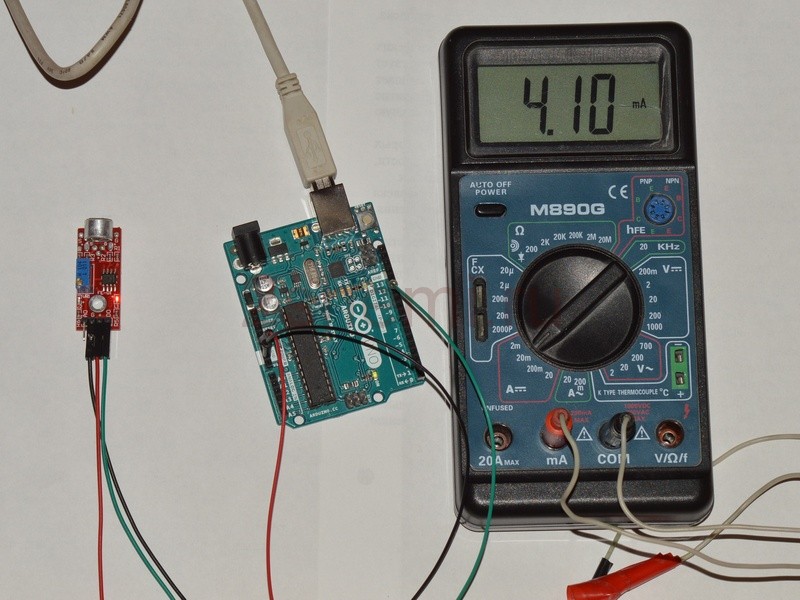 Он сделан из пластика с прочными пластиковыми кнопками. Клавиши подключены к матрице, поэтому вам нужно всего 7 контактов микроконтроллера (3 столбца и 4 ряда) для сканирования пэда. Это в основном…
Он сделан из пластика с прочными пластиковыми кнопками. Клавиши подключены к матрице, поэтому вам нужно всего 7 контактов микроконтроллера (3 столбца и 4 ряда) для сканирования пэда. Это в основном…
Код продукта: 2056
Это действительно самая красивая ручка, которую мы когда-либо видели. Использование этой ручки напомнило нам о поездке по побережью Амальфи на прекрасно отреставрированном Porsche 65-го года — это означает, что нам это очень, очень понравилось. Мы вручную отобрали лучшие ручки для вашего проекта в разных размерах и вариантах. Это Solid Machined Metal Knob — 1″. У него приятное, утяжеленное ощущение…
Код продукта: 1333
Эта мембранная клавиатура имеет одну клавишу, но имеет встроенный красный светодиод для поверхностного монтажа. Гибкий кабель также очень длинный, поэтому мы можем придумать множество носимых и портативных устройств, которые будут использовать этот тип переключателя и иметь светодиод в качестве обратной связи (например, для индикации того, что происходит действие или питание включено). . Так как клавиатура из мягкого пластика, ее можно…
. Так как клавиатура из мягкого пластика, ее можно…
Код продукта: 2058
Этот тонкий и современный потенциометр небольшой и компактный, но хорошо выглядит и приятный на ощупь. Мы вручную отобрали лучшие ручки для вашего проекта в разных размерах и вариантах. Это тонкая металлическая ручка диаметром 10 мм и высотой 10 мм (шлицы T18). Это матовая алюминиевая ручка с блестящим черным (анодированным?) покрытием. Это похоже на тип ручки, которую вы найдете…
Product ID: 2055
Круглый и круглый, эта красивая круглая ручка «скруббер» идеально сочетается с поворотным энкодером. Он имеет широкий диаметр 34,7 мм с красивой канавкой для пальцев на его лицевой стороне, поэтому его легко поворачивать одним пальцем. Лучше всего он работает с нашим поворотным энкодером, просто защелкните его и готово. Обратите внимание: эта ручка не будет работать с нашими потенциометрами со шлицами T18…
Product ID: 2048
О, скажи, ты видишь По раннему свету ручки. .. Извините, мы подумали, что это умно. И хотя на самом деле это не так, эта ручка потенциометра определенно есть. Это мягкая ручка T18, которая отлично работает с нашими потенциометрами Panel Mount 10K, Panel Mount 1K и Panel Mount 100K. Ручка предназначена для установки непосредственно на выступы потенциометра, поэтому это легко и…
.. Извините, мы подумали, что это умно. И хотя на самом деле это не так, эта ручка потенциометра определенно есть. Это мягкая ручка T18, которая отлично работает с нашими потенциометрами Panel Mount 10K, Panel Mount 1K и Panel Mount 100K. Ручка предназначена для установки непосредственно на выступы потенциометра, поэтому это легко и…
Код продукта: 2057
Этот тонкий и современный потенциометр небольшой и компактный, но хорошо выглядит и приятно ощущается. Мы вручную отобрали лучшие ручки для вашего проекта в разных размерах и вариантах. Это тонкая металлическая ручка диаметром 10 мм и высотой 15 мм (шлицы T18). Это матовая алюминиевая ручка с блестящим черным (анодированным?) покрытием. Это похоже на тип ручки, которую вы найдете…
Product ID: 2046
О, скажи, ты видишь По раннему свету ручки… Извините, мы подумали, что это умно. И хотя на самом деле это не так, эта ручка потенциометра определенно есть. Это мягкая ручка T18, которая отлично работает с нашими потенциометрами Panel Mount 10K, Panel Mount 1K и Panel Mount 100K. Ручка предназначена для установки непосредственно на выступы потенциометра, поэтому это легко и…
Ручка предназначена для установки непосредственно на выступы потенциометра, поэтому это легко и…
Код продукта: 5001
Этот причудливый элемент пользовательского интерфейса напоминает оригинальный интерфейс колесика прокрутки на первых iPod. Это причудливый механический набор, но с интуитивностью, с которой трудно поспорить — все знают, как использовать этот вид поворотного энкодера для прокрутки и выбора. Этот продукт представляет собой просто элемент колесика энкодера/кнопки. Распиновка немного странная, мы правда…
Код продукта: 4026
Большинство недорогих датчиков почвы представляют собой резистивные датчики, в которых есть два контакта, и датчик измеряет проводимость между ними. Сначала они работают нормально, но со временем начинают окисляться из-за открытого металла. Даже если они позолочены! Измерение удельного сопротивления увеличивается и увеличивается, поэтому вам постоянно приходится заново калибровать свой код. Кроме того, резистивные измерения. ..
..
Код продукта: 4697
Новое крошечное мягкое наслаждение! Этот черный резиновый колпачок для джойстика является идеальным дополнением к любому из ваших проектов с 5-позиционным навигационным джойстиком, таким как Adafruit Mini Color TFT с джойстиком FeatherWing или Adafruit 128×64 OLED Bonnet для Raspberry Pi. Идеально подходит для классических 5-позиционных навигационных джойстиков, таких как этот. Он прочный, крепкий и плотно прижимается. Мы…
Код продукта: 2925
Если вам нужно много опций, вам нужен мини-8-позиционный поворотный переключатель. По сути, это однополюсный переключатель на 8 положений. Когда вы вращаете ручку, средний штифт соприкасается с каждым из внешних штифтов. Поворотные переключатели очень просты в использовании, а также хороши и компактны. Его легко монтировать на панели благодаря прилагаемым шайбе и шестигранной гайке….
Код продукта: 2765
Иногда простое аналоговое устройство управления может быть идеальным тактильным решением для вашего проекта, но его может быть на удивление трудно найти. К счастью, у нас есть недорогой качественный двухосевой аналоговый мини-джойстик, который удовлетворит ваши потребности в направленном аналоговом входе! Это небольшой джойстик с черной качающейся крышкой, похожий на джойстики PSP. Джойстик представляет собой…
К счастью, у нас есть недорогой качественный двухосевой аналоговый мини-джойстик, который удовлетворит ваши потребности в направленном аналоговом входе! Это небольшой джойстик с черной качающейся крышкой, похожий на джойстики PSP. Джойстик представляет собой…
ID продукта: 3844
Введите свой секретный ключ (или номер Дженни) в эту цифровую матричную клавиатуру. Эта клавиатура имеет 16 кнопок, расположенных по сетке телефонных линий 4×4. Клавиши соединены в матрицу, поэтому вам нужно всего 8 контактов микроконтроллера (4 столбца и 4 ряда) для сканирования пэда. Проверьте вкладку учебных пособий для ссылок на библиотеку Arduino и пример кода. Включаем заголовок…
Код продукта: 3246
Вам не терпится легко установить джойстик, похожий на PSP, в свой проект? Эта аналоговая доска для мини-джойстиков поможет вам в этом! Это аккуратная маленькая печатная плата, на которую можно установить джойстик/джойстик — мы рекомендуем именно его. Поскольку он аналоговый, вам потребуются два контакта аналогового считывания на микроконтроллере для определения X и Y. Мы разработали…
Мы разработали…
Код продукта: 3102
Иногда простое аналоговое устройство управления может быть идеальным тактильным решением для вашего проекта, но достать его на удивление сложно. К счастью, мы нашли недорогой качественный мини-аналоговый джойстик, который удовлетворит ваши потребности в направленном аналоговом входе! В отличие от большинства аркадных джойстиков, оснащенных четырьмя щелкающими переключателями, этот продукт оснащен двумя потенциометрами на 10 кОм…
Код продукта: 4830
Добавьте множество сенсорных датчиков к своему следующему микроконтроллерному проекту с помощью этой простой в использовании 12-канальной коммутационной платы с емкостными сенсорными датчиками на основе MPR121. Этот чип может работать с 12 отдельными сенсорными панелями с разъемом STEMMA QT plug-and-play и большими контактными площадками с зажимами типа «крокодил» — это решение для емкостного сенсорного датчика, не требующее пайки. MPR121 поддерживает…
Код продукта: 5221
Поворотный энкодер ANO — это необычный элемент пользовательского интерфейса, напоминающий оригинальный интерфейс колесика прокрутки с щелчком на первых iPod. Это отличный комплект, но распиновка немного странная, поэтому мы сделали удобную разделочную доску, которая превращает причудливый набор контактов в простую, удобную для макета полосу заголовка. Это просто печатная плата энкодера ANO,…
Это отличный комплект, но распиновка немного странная, поэтому мы сделали удобную разделочную доску, которая превращает причудливый набор контактов в простую, удобную для макета полосу заголовка. Это просто печатная плата энкодера ANO,…
Код продукта: 5093
Пополнение в семействе поворотных потенциометров. Эта ручка имеет приятное мягкое прикосновение со стрелкой на ней, и она намного «тоньше», чем ручка с юбкой, которую мы использовали, поэтому она хорошо подходит для компактных раскладок. Примечание. Это всего лишь ручка. У нас есть удобный для макета поворотный энкодер. Поворотные энкодеры используются в качестве датчиков вращения или селекторов и выглядят…
Product ID: 5059
Быстрая коричневая лиса перепрыгивает через ленивую собаку. Быстрая коричневая лиса прыгает через ленивую собаку. Быстрая коричневая лиса — извините! Мы тренировались печатать НА ЭТОЙ НОВОЙ УДИВИТЕЛЬНОЙ КЛАВИАТУРЕ. Эта клавиатура стандартного размера с 88 специальными клавишами и 12 функциональными клавишами, всего 100 клавиш, является идеальным портативным аксессуаром для вашего Pi или повседневного компьютера, когда вы работаете над проектом. ..
..
Код продукта: 5436
ШИМ-контроллер с квадратной силиконовой кнопкой представляет собой мягкий, простой в подключении выходной ШИМ-контроллер с тремя цветами регулировки мощности: красным, синим и зеленым. Простой способ добавить в свой проект трехтактную кнопку питания/ШИМ и красочный универсальный символ питания. Первоначально они были разработаны для управления модулями грелки в носимых…
Код продукта: 3103
Иногда простое аналоговое устройство управления может быть идеальным тактильным решением для вашего проекта, но достать его на удивление сложно. К счастью, мы нашли недорогой и качественный 2-осевой аналоговый джойстик для большого пальца PSP 3000, который удовлетворит ваши потребности в направленном аналоговом входе! Это сменный компонент для PSP 3000, но мы думаем, что из него получится отличная маленькая…
Код продукта: 4931
Эта тонкая серебристая лента представляет собой интересный датчик. Он изготовлен из сэндвича из пьезоэлектрической пленки шириной 2 мм и длиной 600 мм. Пьезопленку можно использовать для обнаружения движения или вибрации — при перемещении или прикосновении она создает небольшой импульс тока на клеммах. Если к двум клеммам подключить резистор сопротивлением 1 МОм, вы увидите, как ток преобразуется в напряжение…
Пьезопленку можно использовать для обнаружения движения или вибрации — при перемещении или прикосновении она создает небольшой импульс тока на клеммах. Если к двум клеммам подключить резистор сопротивлением 1 МОм, вы увидите, как ток преобразуется в напряжение…
ID продукта: 3845
Введите свой секретный ключ (или номер Дженни) в эту цифровую матричную клавиатуру. Эта клавиатура имеет 12 кнопок, расположенных в сетке телефонных линий 3х4. Клавиши соединены в матрицу, поэтому вам нужно всего 7 контактов микроконтроллера (3 столбца и 4 ряда) для сканирования пэда. Проверьте вкладку учебных пособий для ссылок на библиотеку Arduino и пример кода. Включаем заголовок…
Код продукта: 4060
Жажда реальна! Держите свою флору (растения, а не доску *подмигнул*) счастливой и увлажненной с мини-набором датчика почвы Circuit Playground Express. Этот набор научит вас всему, как поддерживать ваши растения в хорошем состоянии, измеряя влажность почвы с помощью гвоздя и зажима типа «крокодил», а затем отображая красные или зеленые светодиоды на Circuit Playground Express, чтобы сообщить вам. ..
..
Код продукта: 3739
У нас уже давно есть ножной переключатель в магазине, но некоторые люди связались с нами и спросили, есть ли способ дооснастить его для управления переменной скоростью, например, потенциометром. И вот оно! Это потенциометр ножной педали (также известный как регулятор скорости швейной машины). Это действительно хорошее качество, очень прочный, с удобным 3,5-мм аудиоразъемом на…
Код продукта: 166
FSR — это датчики, которые позволяют обнаруживать физическое давление, сдавливание и вес. Они просты в использовании и имеют низкую стоимость. Этот датчик представляет собой модель Interlink 402 FSR с сенсорной областью диаметром 1/2. FSR — это в основном резистор, который меняет свое сопротивление (в омах) в зависимости от того, насколько сильно он нажат. Эти датчики довольно дешевы и просты в использовании, но…
Сообщите мне, Круглый чувствительный к силе резистор (FSR) — Interlink 402
Код продукта: 377
Этот поворотный энкодер лучший из лучших, это высококачественный 24-импульсный энкодер с фиксаторами и приятный на ощупь. Его можно монтировать на панели для размещения в коробке, или вы можете подключить его к макетной плате (просто отрежьте/согните два механических боковых язычка). Мы также включили в комплект приятную мягкую ручку со стрелкой, которая идеально подходит и отлично выглядит. . Этот энкодер также имеет кнопку…
Его можно монтировать на панели для размещения в коробке, или вы можете подключить его к макетной плате (просто отрежьте/согните два механических боковых язычка). Мы также включили в комплект приятную мягкую ручку со стрелкой, которая идеально подходит и отлично выглядит. . Этот энкодер также имеет кнопку…
Уведомить меня, поворотный энкодер + дополнительные функции
Код продукта: 2047
О, скажи, ты видишь По раннему свету ручки… Извините, мы подумали, что это умно. И хотя на самом деле это не так, эта ручка потенциометра определенно есть. Это мягкая ручка T18, которая отлично работает с нашими потенциометрами Panel Mount 10K, Panel Mount 1K и Panel Mount 100K. Ручка предназначена для установки непосредственно на гребни потенциометра, поэтому ее легко и…
Сообщите мне, ручка потенциометра — Soft Touch T18 — белая
Код продукта: 837
Добавьте в свой проект классный сенсорный интерфейс с помощью этого удобного для микроконтроллеров трекпада.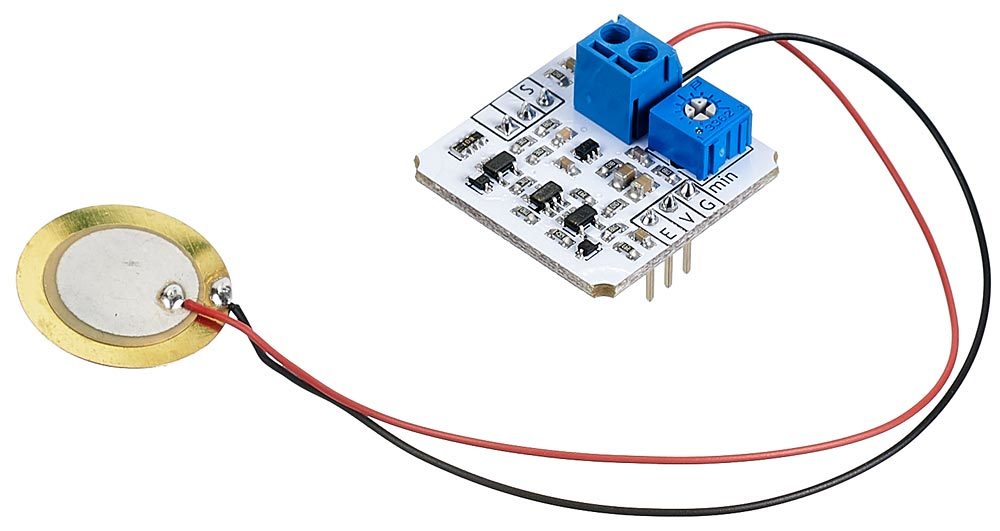 Мы нашли простой в использовании трекпад PS/2, который прост в использовании и интерфейсе. Этот трекпад — два в одном: вы можете использовать его либо в относительном «режиме мыши», когда он выдает движения пальцев по мере их изменения, ЛИБО вы можете перевести его в «режим планшета», где он дает абсолютные X и …
Мы нашли простой в использовании трекпад PS/2, который прост в использовании и интерфейсе. Этот трекпад — два в одном: вы можете использовать его либо в относительном «режиме мыши», когда он выдает движения пальцев по мере их изменения, ЛИБО вы можете перевести его в «режим планшета», где он дает абсолютные X и …
Код продукта: 1917
Набор сенсорных пленок — это отличный новый способ изготовления сенсоров нестандартного размера из чувствительного к силе материала. Этот комплект включает в себя один кусок черной пластиковой сенсорной пленки (она толще и долговечнее, чем Velostat, но аналогична по функциям), два куска толстой алюминиевой фольги и два куска прозрачной клейкой полиэфирной пленки. Сенсорная пленка очень прочная и…
Дополнительная информация, Набор для самостоятельной сборки сенсорной пленки — маленький комплект 4×6 дюймов
Код продукта: 2216
Превратите свои картины в датчики касания. Чего-чего? Да! И это только некоторые из удивительных вещей, которые может делать эта сенсорная панель Bare Conducitve. Эта плата предназначена для интеграции с Bare Conductive Paint, хотя вы можете использовать многие другие проводящие инструменты (она имеет 12 электродов, к которым может быть подключен любой проводящий материал). Но если вы можете нарисовать свой собственный,…
Эта плата предназначена для интеграции с Bare Conductive Paint, хотя вы можете использовать многие другие проводящие инструменты (она имеет 12 электродов, к которым может быть подключен любой проводящий материал). Но если вы можете нарисовать свой собственный,…
Дополнительная информация, голая проводящая сенсорная панель
Код продукта: 5223
Снято с производства — вместо этого вы можете взять 5-позиционный навигационный переключатель с сквозным отверстием! Этот 5-направленный джойстик SMT представляет собой интуитивно понятный способ добавить 5 кнопок, которые будут взаимодействовать с одним компонентом. Внутри 5 переключателей: левый, правый, вверх, вниз и «выбор» (нажатие вниз), все с общим контактом заземления. Это прочный металлический корпус с 6 монтажными петлями для поверхностного монтажа, обеспечивающими как электрические, так и…
Дополнительная информация, SMT 5-позиционный джойстик / навигационный переключатель — 10,5 мм x 10 мм x 7 мм
Код продукта: 3224
Добавьте точное емкостное касание, определение расстояния и высококачественный звук к вашему Raspberry Pi A+, B+, Zero и более поздним версиям (любому Raspberry Pi с 40-контактным разъемом GPIO) с помощью Pi Cap от Bare Conductive! Подключите Electric Paint или что-нибудь проводящее к одному из 12 электродов, чтобы управлять звуками, видео и многим другим. Подключить физический мир к цифровому миру легко…
Подключить физический мир к цифровому миру легко…
Дополнительная информация, Голая проводящая крышка Pi
Код продукта: 3364
pIRkey добавляет ИК-приемник на любой компьютер, ноутбук, планшет… любой компьютер или устройство с портом USB, которое может использовать клавиатуру. Эта маленькая плата вставляется в любой порт USB A и выглядит как повседневная USB-клавиатура. Встроенный микроконтроллер ATSAMD21 прослушивает сигналы ИК-пульта дистанционного управления и преобразует их в нажатия клавиш, движения мыши или даже последовательный вывод USB….
Дополнительная информация, Adafruit pIRkey — программируемый на Python инфракрасный USB-адаптер
Код продукта: 4818
Клавиатура FeatherWing от ребят из Solder Party — это простой способ добавить в свой проект портативную QWERTY-клавиатуру и цветной дисплей 2,6 дюйма (и многое другое)! Хороший размер для переноски и отлично подходит для набора текста большими пальцами в стиле начала 2000-х. Сама клавиатура не содержит MCU/CPU/SoC, которые вы можете запрограммировать; вам понадобится плата, совместимая с Adafruit…
Сама клавиатура не содержит MCU/CPU/SoC, которые вы можете запрограммировать; вам понадобится плата, совместимая с Adafruit…
Дополнительная информация, клавиатура FeatherWing — QWERTY-клавиатура + 2,6-дюймовый ЖК-дисплей
Неонод | Продукты и решения
Наш веб-сайт использует файлы cookie, чтобы понять, как люди используют наш веб-сайт, чтобы мы могли улучшить наш онлайн-опыт.
Политика в отношении файлов cookie
Благодаря технологии Neonode вы можете мгновенно сделать все, от кофемашин до лифтов, полностью бесконтактными. Используя инфракрасные лазеры с настраиваемой частотой сканирования до 900 Гц, наши модули сенсорных датчиков отслеживают движение с точностью до 1,5 мм и временем отклика всего 10 миллисекунд.
Светоотражающая технология позволяет пользователям выполнять мультитач-взаимодействия с чем угодно, будь то пальцы, перчатки или ручка.
Оптическая сенсорная технология Neonode zForce отличается высокой частотой сканирования, малой задержкой и высокой точностью. Он работает в широком диапазоне температур, что делает его идеальным для приложений, предназначенных для работы в суровых условиях.
Он работает в широком диапазоне температур, что делает его идеальным для приложений, предназначенных для работы в суровых условиях.
Встроенная функция самокалибровки также обеспечивает игнорирование прикосновений от нежелательных объектов, таких как прохожие, капли воды или насекомые. Пользователи могут проводить пальцем, прокручивать, сжимать, нажимать и даже подписывать свое имя.
С сенсорными модулями Neonode нет необходимости в наложениях, которые ухудшают качество изображения.
Поместите наш сенсорный модуль на любую поверхность, к которой вы хотите прикоснуться, будь то камень, металл, дерево — возможности безграничны.
Для ситуаций, когда вам необходимо стабильное сенсорное взаимодействие с использованием перчаток или других типов ввода.
Если производительность — это то, что вам нужно, не ищите дальше: модули сенсорных датчиков Neonode могут сканировать до 50 % быстрее, чем традиционные сенсорные сенсоры P-Cap для дисплеев размером 15,6 дюйма.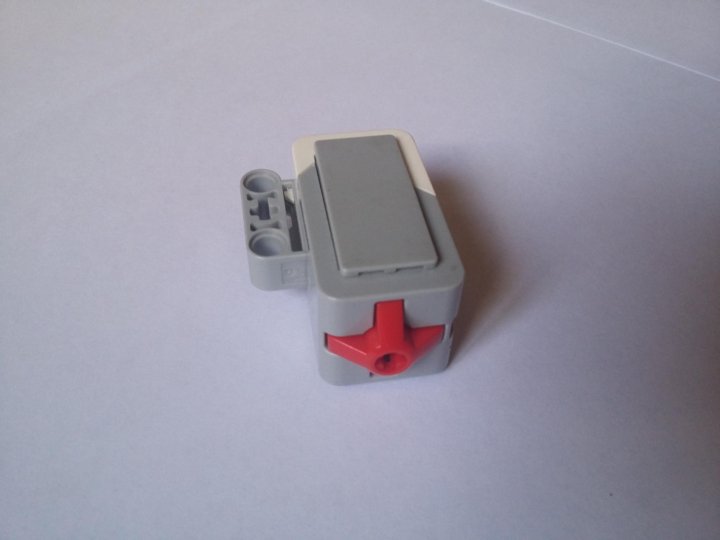
Модули сенсорных датчиков Neonode имеют длину от 101 мм до 374 мм и поддерживают размеры дисплеев до 15,6 дюймов. Индивидуальные длины также доступны по запросу. Просмотрите механические данные, чтобы найти правильную длину для вашего продукта.
| Особенности | Преимущества |
|---|---|
| Настройка диапазона сканирования | |
| Активная область (области) Design Touch | Независимо от того, создаете ли вы простой интерфейс или сложный интерактивный интерфейс, вы можете настроить одну или несколько интерактивных областей. Даже на больших экранах или в проекционных областях вы можете установить несколько разных сенсорных модулей, чтобы создавать прикосновения к разным частям интерфейса. |
| Настройка размера HID-дисплея | Максимизируйте интуитивность, удобство использования и экономичность за счет создания компактных интерактивных концентраторов, которые могут контролировать большие площади. С помощью zForce Programmer вы можете управлять физическим размером экрана с коэффициентом перемещения в десятые доли миллиметра. С помощью zForce Programmer вы можете управлять физическим размером экрана с коэффициентом перемещения в десятые доли миллиметра. |
| Ограничение объектов по размеру | Для еще более эффективного взаимодействия включите или отключите различные размеры допустимых объектов. Например, включите касания объектов размером с ручку или палец и отключите более крупные объекты, такие как рука или локоть, чтобы исключить касания нежелательных объектов. |
| Оптимизация отклика на нажатие | В зависимости от использования вашего приложения вы можете предоставить конечному пользователю более быструю и точную обратную связь, выбрав отчет о щелчке в воздухе при входе в сенсорное поле или, альтернативно, когда объект покидает сенсорное поле. |
| Настройка частоты сканирования | Оптимизация энергопотребления путем настройки частоты холостого хода и установки времени активации сенсорного модуля. Например, настройте сенсорный модуль так, чтобы он находился в активном режиме только при обнаружении сенсорного объекта. |
| Регулировка количества зарегистрированных касаний | Благодаря нашей технологии мультитач вы можете настроить количество точек одновременного касания — до десяти пальцев! |
Параллельный прикосновение плоскости для киосков самообслуживания, приводимых на питание от неонодных сенсорных модулей. ™, установленный в аэропорту Чанги (Сингапур) и международном аэропорту Хамад (Катар)
Аналогичные решения в настоящее время оцениваются несколькими другими аэропортами по всему миру
Посмотрите видео о решении happyhover™ в сингапурском аэропорту Чанги
Узнайте больше о Happymeter и его бесконтактных продуктах by Neonode Touch Sensor Modules
Узнайте больше о Dewhurst и их бесконтактных продуктах
Параллельный сенсорный экран для киосков самообслуживания на базе сенсорных модулей Neonode
-
Бесконтактная система самообслуживания для клиентов Burger King и других точек продаж QSR
-
Адаптируемое решение, идеально подходящее для модернизации существующих киосков
Узнайте больше о продуктах Air-Click от Merim Groupe
Бесконтактные параллельные панели управления лифтом с сенсорными модулями Neonode
-
MAD Elevator является ведущим поставщиком оборудования для лифтов и интерьеров кабин лифтов
-
Бесконтактная (параллельная) панель управления лифтом для существующих и новых лифтовых установок и далее с 2020 г.

Посмотреть видео о бесконтактном датчике PHANTOM
Подробнее о MAD Elevator
Параллельный сенсорный экран для панелей управления лифтом на основе сенсорных модулей Neonode
-
Бесконтактные панели управления лифтами для модернизации
-
Jardine Schindler имеет лицензию HKPC на использование бесконтактных панелей управления лифтами kNOw Touch и применение технологии на местных и зарубежных рынках
9004 Развертывание во многих местах Гонконг, включая торговые центры, правительственные учреждения, офисные здания и международный аэропорт
Посмотреть видео о решении kNOW Touch
Подробная информация о Jardine Schindler
Параллельный сенсорный экран для панелей управления лифтами с питанием от сенсорных модулей Neonode
-
Бесконтактные панели управления лифтами для модернизации и нового оборудования
-
для установки в существующие лифты
-
Несколько крупных корейских лифтовых компаний в настоящее время оценивают и тестируют решения Finetek
Подробнее о Finetek
Голографический сенсорный экран для лифтов и киосков на основе сенсорных модулей Neonode
-
Бесконтактные панели управления лифтами, PoS-системы ресторанов и гостиниц для модернизации и нового оборудования
-
Оценка несколькими лифтами компании, предприятия общественного питания и поставщики гостиничного оборудования в США и Европе
Дополнительная информация о Holo Industries
Parallel Plane Touch для киосков самообслуживания с сенсорными модулями Neonode Touch
— Терминалы бесконтактной самостоятельной регистрации и самообслуживания для сдачи багажа для модернизации
— Выбран крупной азиатской авиакомпанией для модернизации существующих киосков в нескольких азиатских аэропортах
— Дополнительные приложения для бесконтактных киосков находятся на рассмотрении
Узнайте больше о Japan Aerospace и ее бесконтактных продуктах
Параллельный сенсорный экран для панелей управления лифтом, внедрение сенсорных модулей Neonode
-
Бесконтактная (параллельная) панель управления лифтом для существующих и новых лифтовых установок
-
Технология бесконтактной панели управления лифтом коммерциализирована.
 В настоящее время открыта подача заявки на передачу технологии для запатентованной технологии в Азиатско-Тихоокеанском регионе, Австралии, США и других странах.
В настоящее время открыта подача заявки на передачу технологии для запатентованной технологии в Азиатско-Тихоокеанском регионе, Австралии, США и других странах. -
Обладатель золотой медали с поздравлениями жюри Женевской международной выставки 2021
Выставка изобретений -
Сотрудничала и лицензировала технологию компании Jardine Schindler (Гонконг) для производства, маркетинга и продажи Продукта на местном и международном уровнях.
Подробнее о HKPC и решении kNOw Touch
Holographic Touch для терминалов самообслуживания на базе сенсорных модулей Neonode
Посмотреть видео о решении PIN on Air™
Подробнее о Nidec Sankyo
Голографический сенсорный экран для панелей управления лифтами и киосков самообслуживания на базе Neonode
-
Киоски самообслуживания для модернизации в среде здравоохранения
-
Решение, установленное в киосках для самообслуживания в Fuyang Sipants, China
-
Рыночные растворы киосков.
 Easpeed и ее бесконтактные решения
Easpeed и ее бесконтактные решения Голографический сенсорный экран для панелей управления лифтами с сенсорными модулями Neonode
-
Бесконтактные панели управления лифтами для модернизации и нового оборудования
-
Ассортимент голографической продукции YesAR расширяется за счет таких приложений, как интерактивные киоски, автомобильные развлекательные системы и мультимедийные дисплеи. Умный багажник на базе Neonode
-
Умный багажник, который направляет, информирует и развлекает пассажира на его родном языке по пути к рейсу
-
Сенсорный дисплей с сенсорными модулями Neonode, выбранный потому, что качество изображения, долговечность и низкое энергопотребление имеют ключевое значение. Модули и оценочные наборы прямо из интернет-магазина Digi-Key.
Посетите Digi-Key
Поиск запчастей | TTI, Inc.
Онлайн-сервисы TTI доступны только членам,
Пожалуйста, войдите или зарегистрируйтесь, чтобы получить доступ! accountNumber != ‘na'»>
Извиняюсь! У вас нет доступа к этой онлайн-службе в учетной записи: {{appAccount.accountNumber}}
accountNumber != ‘na'»>
Извиняюсь! У вас нет доступа к этой онлайн-службе в учетной записи: {{appAccount.accountNumber}}
Аккаунты не найдены
Пожалуйста, выберите одну из следующих учетных записей, у которых есть доступ.
{{account.accountDisplayData}}
Ни один аккаунт не имеет доступа.
Щелкните здесь, чтобы узнать больше о статусе заказа.
Щелкните здесь, чтобы узнать больше о ezReview.
Извиняюсь! У вас нет доступа к этой онлайн-службе в учетной записи: {{selectedAccount.accountNumber}}
Аккаунты не найдены
Приложение {{serviceName}} в настоящее время недоступно.
Пожалуйста, выберите одну из следующих учетных записей, у которых есть доступ.
{{account.accountDisplayData}}
Нет доступа к учетным записям. Пожалуйста, нажмите здесь, чтобы узнать больше о ezBuy.

Нет доступа к учетным записям. Пожалуйста, нажмите здесь, чтобы узнать больше о ezBuy.
Доступ к вашей услуге {{serviceName}} в настоящее время недоступен, так как ваша корзина «привязана» к учетной записи TTI. которого нет в вашем профиле {{serviceName}}. Вероятно, это произошло из-за того, что ваша корзина содержит одну или несколько деталей. со сниженными ценами.
Чтобы восстановить доступ к ezBuy, очистите корзину, разместив заказ или удалив детали со скидкой. Цены.
Если у вас есть другие вопросы, позвоните своему торговому представителю TTI.
Корзина заблокирована для:
{{selectedAccount.accountNumber}}
{{selectedAccount.billingAddress.name}}
{{selectedAccount.billingAddress.streetAddress}}
{{selectedAccount.billingAddress.city}}, {{selectedAccount.billingAddress.state.stateShortName}} {{selectedAccount.billingAddress.zip}}
{{selectedAccount.billingAddress.country.countryShortName}}-
{{supportModalInfo.
 firstName}} {{supportModalInfo.lastName}}
firstName}} {{supportModalInfo.lastName}}
- {{supportModalInfo.title}}
- {{supportModalInfo.branch}}
- {{supportModalInfo.phone}}
- {{supportModalInfo.email}}
- {{supportModalInfoTwo.firstName}} {{supportModalInfoTwo.lastName}}
- {{supportModalInfoTwo.title}}
- {{supportModalInfoTwo.branch}}
- {{supportModalInfoTwo.phone}}
- {{supportModalInfoTwo.email}}
Электронная почта: {{supportModalInfo.email}}
Отправить быстрое сообщение
Предмет:
Сообщение:
Сообщение успешно отправлено!
Не удалось отправить письмо!
Введите не менее трех символов в поле поиска детали.
请在“零件搜索”字段至少输入三个字符
- Дом
- Поиск детали
- Дом
-
 dividerNeeded == true»/>
{{breadCrumb.displayText}}
dividerNeeded == true»/>
{{breadCrumb.displayText}}
Категории продуктов Выбрать
Показать только
В наличии
Соответствует RoHS
Содержит свинец (Pb)
Без свинца (Pb)
{{ключ}}
Поиск по этим фильтрам
{{::parmx.displayText}}
ezBuy Результаты для: {{partSearchJson.breadcrumbDisplay}}
Вот соответствие {{partSearchJson.krosMatchType}} из списка запчастей ezBuy.
{{partSearchJson.systemsCatalogSEO.pageDescription | limitTo:readMoreLimit}}
250 && readMoreLimit != 9999″> … Читать далее
Примененные фильтры:
К вашему поиску в настоящее время не применяются никакие фильтры.

Сравнить детали Сравнить детали
Просмотр дополнительных данных детали
К сожалению, мы не смогли найти детали, соответствующие этим критериям.
Некоторые типы деталей недоступны в Интернете, но их можно запросить или заказать, обратившись к торговому представителю TTI или по контактам, указанным ниже, для получения немедленной помощи.
IP-адрес заблокирован
Вы были заблокированы из-за большого количества запросов на поиск запчастей. Если вы хотите, чтобы вас разблокировали, нажмите на кнопку и включите любую соответствующую информацию в сообщение.
Запрос на разблокировку
Соответствие RoHS
Соответствие RoHS
Соответствие RoHS
Содержание опасных материалов для веществ, перечисленных в директиве RoHS, находится в пределах, установленных в ЕС. Директива 2011/65/EC и соответствующие поправки.

Не соответствует RoHS
Не соответствует RoHS
Содержание опасных материалов для веществ, перечисленных в директиве RoHS, превышает допустимые пределы, определенные в Директива ЕС 2011/65/EC и соответствующие поправки.
RoHS для исключения
RoHS Да для исключения
Перечисленный номер детали имеет допустимое исключение, как определено в Директиве ЕС 2011/65/EC и соответствующих поправки, 2002/525/ЕС2002/525/ЕС
Соответствие RoHS: в процессе перехода
In Transition Это означает, что в настоящее время наши запасы этого номера детали не соответствуют требованиям RoHS, однако, производитель будет поставлять RoHS: совместимый с TTI в будущем. Это происходит, когда производитель решил не менять номер детали, чтобы указать соответствие RoHS. Свяжитесь с TTI, чтобы определить дату что версия этого продукта, совместимая с RoHS: будет доступна.

Позвоните для подтверждения
Номер детали все еще находится в процессе передачи, или TTI необходимо связаться с заводом, чтобы узнать текущий статус. Позвоните в TTI за помощью на {{internetSalesPhone}}.
Свинец (Pb)
Без свинца
Без свинца
Содержание свинца в концевом материале составляет менее 0,1% по весу, как указано в JEDEC JESD97, пункт 3.5. Справочным документом является Решение Комиссии ЕС 2002/525/EC2002/525/EC, Приложение II Примечания – из Директивы ELV 2000/53/ЕС2000/53/ЕС.
Содержит свинец
Содержит свинец
Содержание свинца в концевом материале составляет > 0,1 % Pb по весу, как указано в JEDEC JESD97, пункт 3.5. Справочным документом является Решение Комиссии ЕС 2002/525/EC2002/525/EC, Приложение II Примечания – из Директивы ELV 2000/53/ЕС2000/53/ЕС.

Звонок для подтверждения
Номер детали все еще находится в процессе передачи, или TTI необходимо связаться с заводом, чтобы узнать текущий статус. Позвоните в TTI за помощью на {{internetSalesPhone}}.
Пожалуйста, выберите одну или несколько деталей, чтобы воспользоваться этой услугой.
Примечание. Этот продукт недоступен для доставки за пределы Северной Америки.
- доб. Цена: {{cartPopObject.addedToCartObject.extendedPrice}}
- {{cartPopObject.addedToCartObject.quantity}} @{{cartPopObject.addedToCartObject.price}}
- {{cartPopObject.addedToCartObject.numberOfReels}} барабанов {{cartPopObject.addedToCartObject.partsPerReel}} @{{cartPopObject.addedToCartObject.price}}
- + 7 долларов США за барабан
Всего в корзине:{{cartPopObject.
 addedToCartObject.cartTotal}}
Просмотр корзины ({{cartPopObject.addedToCartObject.cartPartsCount}} товаров)
addedToCartObject.cartTotal}}
Просмотр корзины ({{cartPopObject.addedToCartObject.cartPartsCount}} товаров)
Датчики касания в 3D — Canatu
Датчики касания в 3D — Canatu перейти к содержанию Отмеченные наградами сенсорные датчикиCanatu обеспечивают интуитивно понятный пользовательский интерфейс с помощью сенсорных элементов управления, которые можно легко интегрировать в различные приложения любой формы и на любую поверхность. В автомобильных салонах сенсорные датчики Canatu могут эффективно заменить несколько механических элементов управления в разных местах кабины, обеспечивая свободу дизайна и интуитивно понятный пользовательский интерфейс.
Сенсорные датчики, обеспечивающие интуитивно понятный пользовательский интерфейс в автомобиле
Отмеченные наградами сенсорные датчики Canatu в 3D позволяют создавать привлекательные пользовательские интерфейсы в автомобилях. Они позволяют дизайнерам создавать новые пользовательские интерфейсы, интегрируя форму, физический пользовательский интерфейс и освещение вместе с широким спектром материалов.
 Сенсорным датчикам Canatu можно придать любую форму, любую поверхность, и они обеспечивают широкую свободу дизайна, сохраняя при этом интуитивно понятный UX.
Сенсорным датчикам Canatu можно придать любую форму, любую поверхность, и они обеспечивают широкую свободу дизайна, сохраняя при этом интуитивно понятный UX. Преимущества Сенсорный датчик Canatu s :
- свобода дизайна для переосмысления автомобильных пользовательских интерфейсов
- гибкие, термоформуемые и прозрачные
- проверенные сенсорные решения, которые можно интегрировать практически на любую поверхность
- 2
- 2 надежность
Усиление любой поверхности
Прозрачные сенсорные датчики Canatu могут быть встроены в дисплеи, пластмассу, стекло, кожу или текстиль. Это открывает неограниченные возможности для интеллектуальных сенсорных поверхностей и предоставляет широкий выбор вариантов интеграции с транспортными средствами.
Экстремальные трехмерные формы
Сенсорные датчики Canatu можно термоформовать и сгибать в экстремальные трехмерные формы, такие как ползунки с канавками и выпуклые кнопки управления.
 Комбинируя сенсорный пользовательский интерфейс с тактильными ощущениями и датчиками силы, дизайнеры могут создавать интуитивно понятные и простые в использовании пользовательские интерфейсы, которые не ставят под угрозу безопасность.
Комбинируя сенсорный пользовательский интерфейс с тактильными ощущениями и датчиками силы, дизайнеры могут создавать интуитивно понятные и простые в использовании пользовательские интерфейсы, которые не ставят под угрозу безопасность. Сенсорные датчики Canatu значительно расширяют возможности пользовательских интерфейсов, с которыми мы знакомы сегодня. Благодаря своей высокой прозрачности сенсорные датчики Canatu обеспечивают эстетическое окружающее освещение, а также решения скрытого освещения, которые уменьшают визуальный беспорядок при сохранении функциональности.
Сенсорные датчики Canatu часто используются для создания многоцелевых переключателей и ползунков, которые заменяют несколько механических элементов управления. Это создает более гладкий, легкий и ненавязчивый интерьер. Эти универсальные качества позволили сенсорным датчикам Canatu завоевать несколько международных наград за материалы и дизайн.
Кроме того, с момента запуска серийного производства в 2015 году компания Canatu стала идеальным выбором для любого требовательного автомобильного проекта благодаря полностью автоматизированной производственной линии, современным чистым помещениям и бесценному опыту.

Загрузите информационный документ по IME
Загрузите информационный документ по электронике для литья под давлением (IME), чтобы узнать, как технологии и опыт Canatu могут поддержать и улучшить ваш следующий проект IME.
Награды
Рулевое колесо Origo
Рулевое колесо Origo, основанное на сенсорных датчиках Canatu, обеспечивает пользовательский опыт (UX) смарт-устройства в автомобилях. Он был разработан для повышения безопасности за счет снижения отвлечения внимания водителя с помощью интуитивно понятных элементов управления. Эта демонстрация включает в себя UX, который обычно используется в интеллектуальных устройствах, в автомобильных приложениях, позволяя управлять всеми ключевыми функциями, просто используя большие пальцы, не отпуская руль, сводя к минимуму отвлекающие факторы и повышая безопасность. С тех пор эта концепция была названа лауреатом премии CES 2022 Innovation Awards и победителем German Design Awards 2021.
Узнать больше
Сенсорные датчики на обшивке дверей
TS TECH и Canatu совместно разработали новое сенсорное 3D-решение для автомобильных приложений.
 Демонстрация включает сенсорные 3D-переключатели на декоративной отделке двери для управления регулировкой сидений с электроприводом, что обеспечивает более удобное и комфортное взаимодействие с пользователем, а также предлагает OEM-производителям возможности дифференциации за счет более высокой степени свободы дизайна.
Демонстрация включает сенсорные 3D-переключатели на декоративной отделке двери для управления регулировкой сидений с электроприводом, что обеспечивает более удобное и комфортное взаимодействие с пользователем, а также предлагает OEM-производителям возможности дифференциации за счет более высокой степени свободы дизайна. Сенсорные датчики Canatu в 3D в сочетании с декоративными дверными накладками TS TECH обеспечивают интуитивно понятный пользовательский интерфейс в сочетании с цельным дизайном.
Узнать больше
Посмотреть похожие видео
Свяжитесь с Tero
Отправьте нам сообщение
Примечание: для этого контента требуется JavaScript.
Сопутствующее содержимое
Прозрачные проводящие пленки
Прозрачные проводящие пленки используются в нагревателях ADAS и гибких сенсорных изделиях. Пленки Canatu CNT имеют наилучшее промышленно применимое отношение сопротивления листа к оптической прозрачности, когда-либо наблюдаемое в пленках CNT, что обеспечивает высокую производительность в конечных приложениях.
 Учить больше.
Учить больше. Обогреватель ADAS LiDAR
Датчики LiDAR являются ключевой технологией в усовершенствованных системах помощи водителю (ADAS). Вместе с камерами и радарами лидары позволяют получать информацию об окружающей среде в режиме реального времени. Нагреватели LiDAR, основанные на уникальной технологии Canatu CNT, обеспечивают надежную работу лидара в любую погоду. Учить больше.
Свойства УНТ Canatu
Углеродные нанотрубки обладают уникальными механическими, электрическими, тепловыми, оптическими и химическими свойствами. УНТ обладают очень высокой прочностью на растяжение, высокой тепло- и электропроводностью, они очень гибкие и очень эластичные. Откройте для себя свойства CNT.
Новости углеродного века
Подробнее новости
Прозрачный растягивающийся датчик для различимого обнаружения прикосновения и давления за счет емкостной и пьезорезистивной передачи сигнала
Введение
За последние несколько лет были проведены многочисленные исследования по разработке растягиваемых физических датчиков для человеко-машинных интерфейсов, которые можно носить или носить прикрепленный к коже человека 1,2,3,4,5,6,7,8,9,10,11,12,13,14,15,16,17,18,19,20,21,22,23 ,24 .
 Такие прикрепляемые к телу растягиваемые физические датчики, способные обнаруживать прикосновение, давление, напряжение или температуру, также можно использовать для мониторинга деятельности человека 2,3,4,5,6,7,8,9,10,11, 12,13,14,15,16,17,18 , состояние здоровья 18,19,20,21 , болезни 22,23,24 . Интеграция нескольких датчиков с различными модальностями в качестве носимых устройств ввода была исследована как подход к мультимодальному взаимодействию между людьми и машинами 18,24,25,26,27 . Тем не менее, интеграция нескольких датчиков для мультимодальной интерактивности часто требует большой площади обнаружения, сложной структуры устройства, увеличения количества взаимосвязей и сложных процессов изготовления 18,24,25,26,27 . Один из способов обойти эти ограничения — разработать датчик, способный обнаруживать и различать два или более физических раздражителя. Например, были продемонстрированы бимодальные гибкие датчики для одновременного количественного определения температуры и давления 28,29,30,31 .
Такие прикрепляемые к телу растягиваемые физические датчики, способные обнаруживать прикосновение, давление, напряжение или температуру, также можно использовать для мониторинга деятельности человека 2,3,4,5,6,7,8,9,10,11, 12,13,14,15,16,17,18 , состояние здоровья 18,19,20,21 , болезни 22,23,24 . Интеграция нескольких датчиков с различными модальностями в качестве носимых устройств ввода была исследована как подход к мультимодальному взаимодействию между людьми и машинами 18,24,25,26,27 . Тем не менее, интеграция нескольких датчиков для мультимодальной интерактивности часто требует большой площади обнаружения, сложной структуры устройства, увеличения количества взаимосвязей и сложных процессов изготовления 18,24,25,26,27 . Один из способов обойти эти ограничения — разработать датчик, способный обнаруживать и различать два или более физических раздражителя. Например, были продемонстрированы бимодальные гибкие датчики для одновременного количественного определения температуры и давления 28,29,30,31 .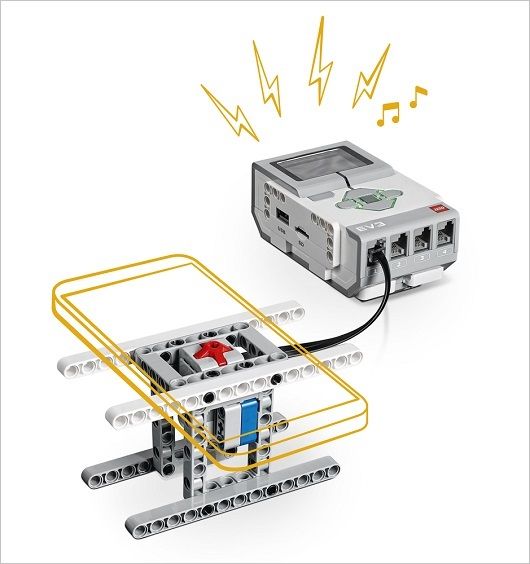 Однако сообщения об одном растягиваемом мультимодальном устройстве и его массиве в качестве конформно носимого устройства ввода редки.
Однако сообщения об одном растягиваемом мультимодальном устройстве и его массиве в качестве конформно носимого устройства ввода редки. В частности, создание такого носимого устройства для применения в мультимодальных человеко-машинных интерфейсах влечет за собой разработку растягиваемого датчика, способного различать входные данные прикосновения и давления (силы). Поскольку в растягиваемые дисплеи можно интегрировать носимый растягиваемый сенсор давления, оптическая прозрачность также является желательным атрибутом. Несколько исследовательских групп разработали датчики прикосновения и давления с оптической прозрачностью или способностью к растяжению для обнаружения стимулов прикосновения и давления 9.1145 32,33 . В этих проектах для мультимодальной интерактивности требовалось формирование двух или более датчиков на одной подложке 32 . Кроме того, эти датчики демонстрировали ограничения в работе с точки зрения чувствительности, механических и оптических характеристик, когда их носили люди или прикрепляли к коже человека 33 .
 Поэтому представляет большой интерес разработка прозрачного растягиваемого (ТС) сенсора для обнаружения стимулов прикосновения и давления, обладающего механической растяжимостью, оптической прозрачностью и высокой чувствительностью, а также способного обнаруживать и различать стимулы прикосновения и давления в пространстве. одно устройство (см. таблицу S1 в дополнительной информации).
Поэтому представляет большой интерес разработка прозрачного растягиваемого (ТС) сенсора для обнаружения стимулов прикосновения и давления, обладающего механической растяжимостью, оптической прозрачностью и высокой чувствительностью, а также способного обнаруживать и различать стимулы прикосновения и давления в пространстве. одно устройство (см. таблицу S1 в дополнительной информации). В этом исследовании представлен метод реализации бимодального датчика прикосновения и давления взаимного емкостного типа, который соответствует требованиям, описанным выше. Подложка и каждый слой бимодального сенсорного устройства были изготовлены из прозрачных материалов. Для повышения механической стабильности слоев использовали трехмерную (3D), поглощающую деформации полидиметилсилоксановую (ПДМС) подложку с микроузором и неровной морфологией (криволинейно соединенные выпуклости и впадины) 34 . В качестве диэлектрика использовался изолирующий прозрачный слой полиуретана (ПУ). Прозрачный пьезорезистивный композитный слой поли(3,4-этилендиокситиофен):поли(стиролсульфонат)/1-этил-3-метилимидазолия тетрацианобората (PEDOT:PSS/EMIM-TCB) с хорошей оптической прозрачностью (~ 84% при толщине 300 нм) использовался в качестве верхнего электрода, что позволяло различать прикосновение и давление.
 Ультратонкий многослойный электрод Au/ITO (оксид индия-олова)/Au (GIG) с оптической прозрачностью (~ 65%) и низким поверхностным сопротивлением (~ 11,5 Ом кв. -1 ) использовали в качестве нижнего электрода. Для устройства с толщиной диэлектрического слоя ПУ 2,7 мкм были достигнуты превосходная чувствительность к прикосновению -23,4% и чувствительность к высокому давлению 0,1 кПа -1 . Трехмерная микроструктура улучшила чувствительность к давлению из-за большей деформации пьезорезистивного верхнего электрода на неровностях. Затем было изготовлено сенсорное устройство 4 × 4 матрицы с эластичностью, прозрачностью и многофункциональностью для демонстрации взаимодействия человека и машины. Механическая оценка одного устройства и массива при растяжении показала, что чувствительность к раздражителям прикосновения сохранялась после 10 000 циклов растяжения при 30% деформации растяжения. Наконец, было успешно подтверждено, что небольшим транспортным средством можно управлять по беспроводной сети, установив массив сенсорных датчиков давления на запястье.
Ультратонкий многослойный электрод Au/ITO (оксид индия-олова)/Au (GIG) с оптической прозрачностью (~ 65%) и низким поверхностным сопротивлением (~ 11,5 Ом кв. -1 ) использовали в качестве нижнего электрода. Для устройства с толщиной диэлектрического слоя ПУ 2,7 мкм были достигнуты превосходная чувствительность к прикосновению -23,4% и чувствительность к высокому давлению 0,1 кПа -1 . Трехмерная микроструктура улучшила чувствительность к давлению из-за большей деформации пьезорезистивного верхнего электрода на неровностях. Затем было изготовлено сенсорное устройство 4 × 4 матрицы с эластичностью, прозрачностью и многофункциональностью для демонстрации взаимодействия человека и машины. Механическая оценка одного устройства и массива при растяжении показала, что чувствительность к раздражителям прикосновения сохранялась после 10 000 циклов растяжения при 30% деформации растяжения. Наконец, было успешно подтверждено, что небольшим транспортным средством можно управлять по беспроводной сети, установив массив сенсорных датчиков давления на запястье. Датчик давления прикосновения TS с емкостной структурой устройства имеет большой потенциал в качестве носимого устройства ввода в будущих человеко-машинных интерфейсах, которые требуют высокой функциональности и мультимодальной интерактивности.
Датчик давления прикосновения TS с емкостной структурой устройства имеет большой потенциал в качестве носимого устройства ввода в будущих человеко-машинных интерфейсах, которые требуют высокой функциональности и мультимодальной интерактивности. Материалы и методы.
Материалы. CLEVIOS Ph2000, Heraues), EMIM-TCB (1-этил-3-метилимидазолия тетрацианоборат, Merck) и Au-Ni тканый проводящий текстиль (Silverized Nylon/Spandex Knit SMP 130, Solueta Co. Ltd) были использованы в том виде, в каком они были приобретены.
Приготовление композита PEDOT:PSS/EMIM-TCB
PEDOT:PSS Ph2000 взвешивали, добавляли во флакон и перемешивали с высокой скоростью (>300 об/мин), а раствор EMIM-TCB добавляли непосредственно в перемешиваемую смесь. PEDOT:дисперсия PSS.
Изготовление эластомерной подложки с трехмерным микроузором
Форма с массивом трехмерных микроузоров на стеклянной подложке была изготовлена методом двойной фотолитографии с использованием позитивного фоторезиста 34 .
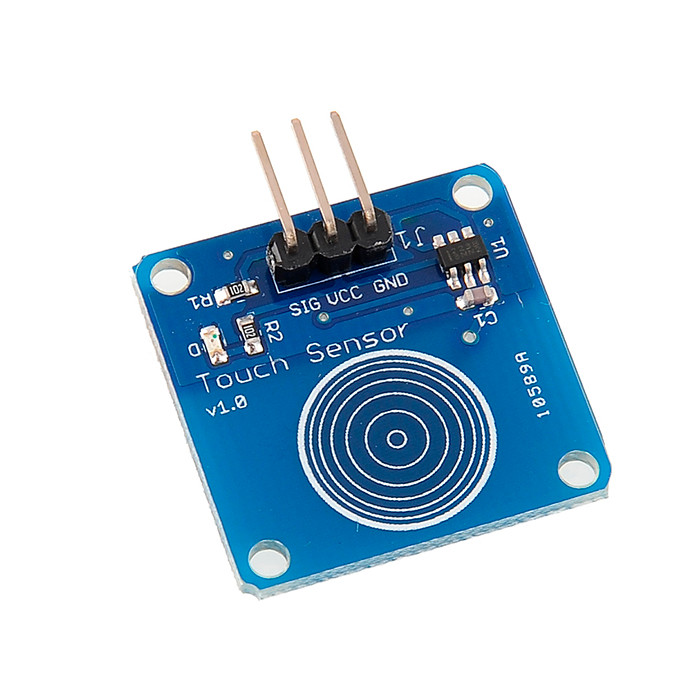 Затем из формы был воспроизведен трехмерный микроузор PDMS, а мастер-форма из полиуретанового акрилата (PUA) была воспроизведена из формы PDMS для повторного воспроизведения подложки PDMS. Формы PDMS и PUA с микроструктурой повторялись неоднократно и взаимозаменяемо.
Затем из формы был воспроизведен трехмерный микроузор PDMS, а мастер-форма из полиуретанового акрилата (PUA) была воспроизведена из формы PDMS для повторного воспроизведения подложки PDMS. Формы PDMS и PUA с микроструктурой повторялись неоднократно и взаимозаменяемо. Анализ методом конечных элементов
3D FEA (программное обеспечение ABAQUS) позволяет анализировать полную механику деформации и вычислять механические реакции при одноосных нагрузках. Четырехузловые трехмерные твердотельные элементы и четырехузловые элементы оболочки использовались для ITO (50 и 200 нм) на подложке PDMS с трехмерным микроузором и ITO (200 нм) на плоской подложке PDMS соответственно. Распределение напряжений ITO-электродов оценивалось для силовой нагрузки 120 МПа в режиме растяжения.
Изготовление и определение характеристик сенсоров давления прикосновения
Датчик давления прикосновения TS был изготовлен с использованием следующей процедуры. Для улучшения адгезии электродных слоев слой Al 2 O 3 толщиной 3 нм был нанесен методом атомно-слоевого осаждения (ALD), а затем слой Cr толщиной 3 нм был нанесен методом e — пучковое напыление с последующим осаждением слоев GIG (Au-ITO-Au) с использованием e пучкового напыления и усовершенствованного напыления постоянным током (DC) 35 .
 В качестве диэлектрического слоя наносились ПУД различной толщины. Затем пленку ПУД высушивали на горячей плите при 120°С в течение 2 ч. Затем слой композиционного пьезорезистивного материала PEDOT:PSS/EMIM-TCB толщиной 300 нм был покрыт центрифугированием в качестве чувствительного к давлению материала верхнего электрода. Устройство было инкапсулировано PDMS с центрифугированием для предотвращения помех окружающей среды во время измерения.
В качестве диэлектрического слоя наносились ПУД различной толщины. Затем пленку ПУД высушивали на горячей плите при 120°С в течение 2 ч. Затем слой композиционного пьезорезистивного материала PEDOT:PSS/EMIM-TCB толщиной 300 нм был покрыт центрифугированием в качестве чувствительного к давлению материала верхнего электрода. Устройство было инкапсулировано PDMS с центрифугированием для предотвращения помех окружающей среды во время измерения. Датчик был измерен путем приложения импульса переменного тока (AC) с амплитудой −3 ~ 3 В и частотой 10 Гц к верхнему электроду для индуцирования дипольного выравнивания внутри диэлектрического слоя PU с использованием функционального генератора (Tektronix AFG3102) . Заряды, индуцированные на границе между диэлектриком и электродами, регистрировались как мгновенный ток на нижнем электроде с помощью блока измерения источника (HP 4145B).
Демонстрация массива датчиков давления 4 × 4
Выходным сигналом матрицы датчиков давления прикосновения является электрический ток, поэтому мы использовали трансимпедансный усилитель (OPA2380, National Instruments, США) для преобразования сигнала электрического тока (выходной сигнал матрицы датчиков давления прикосновения) в сигнал электрического напряжения.
 . Инвертирующий усилитель (LM324, National Instruments, США) использовался для усиления преобразованного сигнала напряжения до минимально необходимого уровня напряжения 10-разрядного аналого-цифрового преобразователя (АЦП), резисторно-конденсаторного (RC) фильтра нижних частот. использовался фильтр с частотой среза 10 Гц, чтобы избежать более высоких частот, которые обычно наводятся из-за линий электропередач.
. Инвертирующий усилитель (LM324, National Instruments, США) использовался для усиления преобразованного сигнала напряжения до минимально необходимого уровня напряжения 10-разрядного аналого-цифрового преобразователя (АЦП), резисторно-конденсаторного (RC) фильтра нижних частот. использовался фильтр с частотой среза 10 Гц, чтобы избежать более высоких частот, которые обычно наводятся из-за линий электропередач. Для демонстрации управления светодиодной подсветкой красный и зеленый светодиоды были подключены к двум портам Arduino® UNO. В отсутствие прикосновения или давления на массив бимодальных датчиков касания-давления TS выходной ток оставался неизменным, как и вход микроконтроллера. При прикосновении к любому датчику в массиве бимодальных датчиков прикосновения-давления TS или при приложении давления выходной сигнал резко уменьшался. 10-битный АЦП Arduino® UNO непрерывно собирал входные данные и преобразовывал их в цифровой сигнал для дальнейшей обработки. На основе выходных данных, полученных от массива датчиков, в коде, написанном Arduino® IDE (интегрированная среда разработки), было задано пороговое значение напряжения, чтобы различать стимулы прикосновения и давления.
 При прикосновении к датчику зеленый светодиод начинал мигать с задержкой 500 мс. При приложении давления к датчику красный светодиод мигал с той же задержкой, что и зеленый светодиод. Мы продемонстрировали это в фильме S1, где данные о прикосновении и давлении можно увидеть на осциллографе вместе с мигающими светодиодами в реальном времени.
При прикосновении к датчику зеленый светодиод начинал мигать с задержкой 500 мс. При приложении давления к датчику красный светодиод мигал с той же задержкой, что и зеленый светодиод. Мы продемонстрировали это в фильме S1, где данные о прикосновении и давлении можно увидеть на осциллографе вместе с мигающими светодиодами в реальном времени. Кроме того, чтобы продемонстрировать, что наш массив датчиков TS можно использовать для более сложного взаимодействия человека и машины, мы использовали его для управления маленькой игрушечной машинкой. В этой демонстрации мы прикрепили массив датчиков TS 4 × 4 к человеческому предплечью, чтобы контролировать направление и скорость игрушечной машинки. Для сбора данных мы использовали ту же аналоговую схему, которая ранее использовалась для демонстрации светодиодов, но для обработки входного сигнала были созданы специальные коды «ведущий» и «ведомый» (термины, широко используемые во встроенных системах), написанные Arduino® IDE. и работающие в Arduino® UNO.
 На основании обработанных данных машинке с помощью модуля Bluetooth с низким энергопотреблением (BLE) (HC-05, DigiKey, США) отправляли соответствующие команды. Здесь прикосновение к датчику заставляло игрушечную машинку двигаться в определенном направлении с низкой скоростью, тогда как приложение давления к тому же устройству увеличивало скорость машины в том же направлении. При каждом обнаружении прикосновения или давления транспортное средство перемещалось в течение 500 мс, а затем останавливалось, если последующее прикосновение или давление не обнаруживалось. Используя три устройства в массиве датчиков 4 × 4, мы успешно продемонстрировали движение игрушечной машинки в прямом направлении с низкой и высокой скоростью, плавно поворачивая влево и вправо, а затем снова двигаясь вперед как с низкой, так и с высокой скоростью (Фильм S2). .
На основании обработанных данных машинке с помощью модуля Bluetooth с низким энергопотреблением (BLE) (HC-05, DigiKey, США) отправляли соответствующие команды. Здесь прикосновение к датчику заставляло игрушечную машинку двигаться в определенном направлении с низкой скоростью, тогда как приложение давления к тому же устройству увеличивало скорость машины в том же направлении. При каждом обнаружении прикосновения или давления транспортное средство перемещалось в течение 500 мс, а затем останавливалось, если последующее прикосновение или давление не обнаруживалось. Используя три устройства в массиве датчиков 4 × 4, мы успешно продемонстрировали движение игрушечной машинки в прямом направлении с низкой и высокой скоростью, плавно поворачивая влево и вправо, а затем снова двигаясь вперед как с низкой, так и с высокой скоростью (Фильм S2). . Результаты
Концепция прозрачного и растягивающегося датчика давления прикосновения
Схематическое изображение устройства датчика давления прикосновения ТС, устанавливаемого на предплечье тела человека, показано на рис.
Рис. 1: Принципиальная схема прозрачного растягиваемого бимодального сенсора давления прикосновения. 1а. Бимодальный датчик прикосновения-давления TS может обнаруживать и различать легкое прикосновение пальца человека и интенсивное воздействие давлением, используя изменения емкости устройства и сопротивления пьезорезистивного верхнего электрода соответственно. На рис. 1b схематически показана структура взаимного емкостного датчика касания-давления. Датчик был изготовлен путем последовательного формирования ультратонкого металлического нижнего электродного слоя GIG, диэлектрического слоя с использованием водорастворимой дисперсии PU, пьезорезистивного верхнего электродного слоя с использованием композита PEDOT:PSS/EMIM-TCB и герметизирующего слоя PDMS на подложка из PDMS с трехмерным микроузором 34 . Дизайн подложки был вдохновлен геометрией холма и впадины и имеет криволинейно соединенные пики и впадины без плоских областей, чтобы свести к минимуму растрескивание слоистых материалов в верхней части, избегая чрезмерной концентрации напряжений во время растяжения, тем самым повышая способность к поперечному растяжению в разных направлениях.
1а. Бимодальный датчик прикосновения-давления TS может обнаруживать и различать легкое прикосновение пальца человека и интенсивное воздействие давлением, используя изменения емкости устройства и сопротивления пьезорезистивного верхнего электрода соответственно. На рис. 1b схематически показана структура взаимного емкостного датчика касания-давления. Датчик был изготовлен путем последовательного формирования ультратонкого металлического нижнего электродного слоя GIG, диэлектрического слоя с использованием водорастворимой дисперсии PU, пьезорезистивного верхнего электродного слоя с использованием композита PEDOT:PSS/EMIM-TCB и герметизирующего слоя PDMS на подложка из PDMS с трехмерным микроузором 34 . Дизайн подложки был вдохновлен геометрией холма и впадины и имеет криволинейно соединенные пики и впадины без плоских областей, чтобы свести к минимуму растрескивание слоистых материалов в верхней части, избегая чрезмерной концентрации напряжений во время растяжения, тем самым повышая способность к поперечному растяжению в разных направлениях. Кроме того, повышенная деформация пьезорезистивного верхнего электрода на выступах при вертикальном давлении приводит к увеличению чувствительности к давлению, когда индуцированные в структуре конденсатора поверхностные заряды считываются как сигнал переменного тока.
Кроме того, повышенная деформация пьезорезистивного верхнего электрода на выступах при вертикальном давлении приводит к увеличению чувствительности к давлению, когда индуцированные в структуре конденсатора поверхностные заряды считываются как сигнал переменного тока. a Схематическое изображение бимодальной матрицы сенсорных датчиков давления. b Увеличенное изображение бимодального датчика давления прикосновения, состоящего из пяти слоев. c Спектры оптического пропускания области устройства, состоящей из уложенных друг на друга электродов и диэлектрического слоя, за вычетом вклада подложки PDMS. Врезка: фотография изготовленного одиночного датчика. d Изображение FE-SEM трехмерной подложки PDMS с микроузором. e FEM-моделирование распределения напряжений на поверхности ITO (200 нм), сформированной на плоской (вверху) и 3D-микроструктурированной (внизу) подложках PDMS при растягивающем усилии 120 MPa
Полноразмерное изображение
Этот одиночный датчик имеет ромбовидная конструкция электрода для уменьшения перекрытия верхнего и нижнего электродов (см.
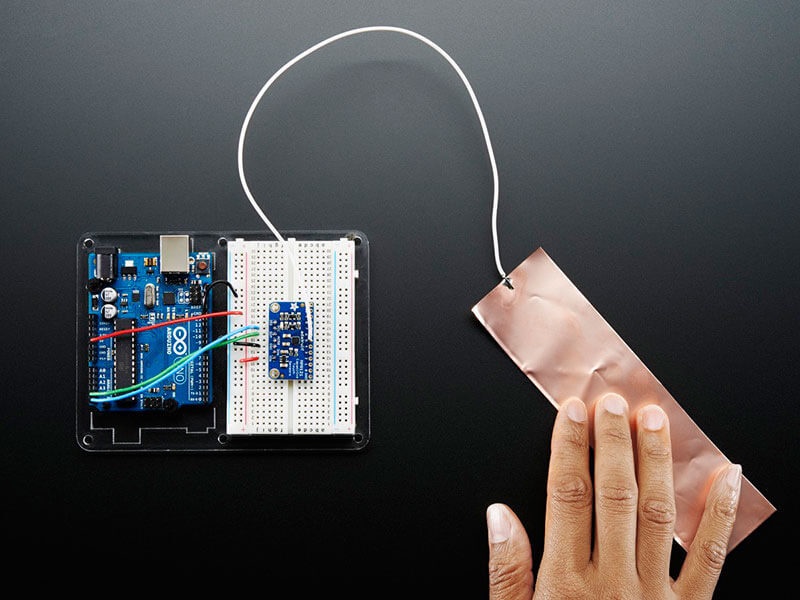 рис. 1c), улучшающая как оптическое пропускание, так и чувствительность чувствительной области. Реакция сенсора на прикосновение и давление измерялась путем подачи прямоугольного напряжения переменного тока на верхний электрод, чтобы вызвать выравнивание диполей внутри диэлектрического слоя ПУ, а затем заряды, индуцированные на границе раздела между диэлектриком и электродами, регистрировались как мгновенные ток через нижний электрод. Расчетное время реакции на прикосновение и давление составило примерно 0,14 с. Более подробная информация о процессе изготовления и измерениях подложки с 3D-микроузором и сенсорного датчика давления представлена в разделе «Материалы и методы». Как показано на рис. 1в, оптическое пропускание двух уложенных друг на друга электродов и диэлектрического слоя (вставка на рис. 1в), исключая подложку, составляло примерно 80% на длине волны 550 нм. Высокий оптический коэффициент пропускания объясняется конструкцией верхнего и нижнего электродов с минимальным перекрытием по вертикали.
рис. 1c), улучшающая как оптическое пропускание, так и чувствительность чувствительной области. Реакция сенсора на прикосновение и давление измерялась путем подачи прямоугольного напряжения переменного тока на верхний электрод, чтобы вызвать выравнивание диполей внутри диэлектрического слоя ПУ, а затем заряды, индуцированные на границе раздела между диэлектриком и электродами, регистрировались как мгновенные ток через нижний электрод. Расчетное время реакции на прикосновение и давление составило примерно 0,14 с. Более подробная информация о процессе изготовления и измерениях подложки с 3D-микроузором и сенсорного датчика давления представлена в разделе «Материалы и методы». Как показано на рис. 1в, оптическое пропускание двух уложенных друг на друга электродов и диэлектрического слоя (вставка на рис. 1в), исключая подложку, составляло примерно 80% на длине волны 550 нм. Высокий оптический коэффициент пропускания объясняется конструкцией верхнего и нижнего электродов с минимальным перекрытием по вертикали. Изображение сканирующей электронной микроскопии с полевой эмиссией (FE-SEM) сверху трехмерной подложки PDMS с микроузором показано на рис. 1d. Эффективная способность поглощать напряжения подложки PDMS с трехмерным микроузором позволила разработать прозрачный и растяжимый нижний электрод на основе ITO, в отличие от высоких концентраций напряжений в слое ITO на плоской подложке PDMS, что привело к сильному растрескиванию (рис. 1e). ).
Изображение сканирующей электронной микроскопии с полевой эмиссией (FE-SEM) сверху трехмерной подложки PDMS с микроузором показано на рис. 1d. Эффективная способность поглощать напряжения подложки PDMS с трехмерным микроузором позволила разработать прозрачный и растяжимый нижний электрод на основе ITO, в отличие от высоких концентраций напряжений в слое ITO на плоской подложке PDMS, что привело к сильному растрескиванию (рис. 1e). ). Прозрачные и растягивающиеся электроды на эластомерной подложке с трехмерным микроузором
Для реализации бимодального датчика давления прикосновения TS крайне важно разработать верхний и нижний электроды с электрическими, оптическими и механическими свойствами, необходимыми для оптической прозрачности, чувствительности, и механическая растяжимость устройства. Электродные слои были сформированы непосредственно на подложке с трехмерным микрорельефом с использованием тонкопленочных процессов, и были охарактеризованы их электрические, оптические и механические свойства (рис.
Рис. 2: Оценка прозрачных и эластичных электродов.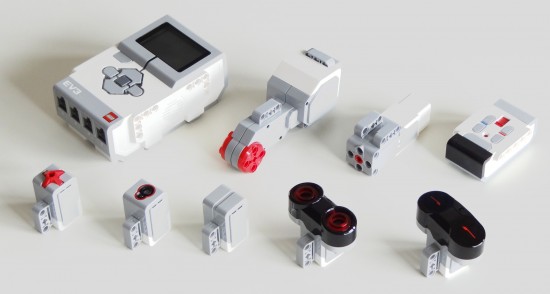 2). Для нижнего электрода ТС с низким пьезорезистивным сопротивлением и оптической прозрачностью используются различные структуры со сверхтонкими металлическими слоями Ti (адгезионный слой толщиной 3 нм)/Au различной толщины (10, 20 и 30 нм) и многослойные ГИГ-структуры Au (5 нм)/ITO/Au (5 нм)-Ti (адгезионный слой, толщина 3 нм) были изготовлены с использованием e — лучевое напыление (Ti и Au) и усовершенствованный метод напыления на постоянном токе (ITO) 35 при 135 °C. Сравнение поверхностного сопротивления и оптического пропускания ультратонкого электрода из золота показало, что оба они уменьшались по мере увеличения толщины золота (рис. 2а). Только в случае ультратонких слоев Au оптимизация оптического пропускания и поверхностного сопротивления была ограничена. Например, поверхностное сопротивление электрода Ti (3 нм)/Au (10 нм) общей толщиной 13 нм достигало 473 Ом кв·9.1145 -1 , хотя и имел высокий оптический коэффициент пропускания 70,8%. Когда толщина Au была увеличена для снижения сопротивления листа, оптический коэффициент пропускания значительно увеличился.
2). Для нижнего электрода ТС с низким пьезорезистивным сопротивлением и оптической прозрачностью используются различные структуры со сверхтонкими металлическими слоями Ti (адгезионный слой толщиной 3 нм)/Au различной толщины (10, 20 и 30 нм) и многослойные ГИГ-структуры Au (5 нм)/ITO/Au (5 нм)-Ti (адгезионный слой, толщина 3 нм) были изготовлены с использованием e — лучевое напыление (Ti и Au) и усовершенствованный метод напыления на постоянном токе (ITO) 35 при 135 °C. Сравнение поверхностного сопротивления и оптического пропускания ультратонкого электрода из золота показало, что оба они уменьшались по мере увеличения толщины золота (рис. 2а). Только в случае ультратонких слоев Au оптимизация оптического пропускания и поверхностного сопротивления была ограничена. Например, поверхностное сопротивление электрода Ti (3 нм)/Au (10 нм) общей толщиной 13 нм достигало 473 Ом кв·9.1145 -1 , хотя и имел высокий оптический коэффициент пропускания 70,8%. Когда толщина Au была увеличена для снижения сопротивления листа, оптический коэффициент пропускания значительно увеличился.
a График сопротивления листового пропускания различных протестированных структур прозрачного нижнего электрода. b Изменение сопротивления ( ΔR/R 0 ) в зависимости от удлинения GIG [Au (5 нм)/ITO (200 нм)/Au (5 нм)-Ti (адгезионный слой, 3 нм)] электрод на подложке с трехмерным микрорельефом. c Изменение сопротивления ( ΔR/R 0 ) в GIG-электроде [Au (5 нм)/ITO (200 нм)/Au (5 нм)-Ti (адгезионный слой, 3 нм)] на подложка с трехмерным микроузором в зависимости от циклов растяжения при деформации 30%. d Оптическое изображение поверхности GIG-электрода [Au (5 нм)/ITO (200 нм)/Au (5 нм)-Ti (адгезионный слой, 3 нм)] на подложке с трехмерным микроузором после 10 000 циклов растяжения, полученное с использованием оптический микроскоп. e Оптическое пропускание композитных электродов PEDOT:PSS/EMIM-TCB с различными концентрациями EMIM-TCB.
 Вставка: фотография композитной пленки PEDOT:PSS/EMIM-TCB (0,3 мас.%) на плоской подложке PDMS (оранжево-пунктирная линия). f Изменение сопротивления ( ΔR/R 0 ) в зависимости от удлинения композитного электрода PEDOT:PSS/EMIM-TCB (0,3 мас.%) на плоской подложке PDMS. г Изменение сопротивления ( ΔR/R 0 ) композитного электрода PEDOT:PSS/EMIM-TCB (0,3 мас.%) на плоской подложке PDMS в зависимости от циклов растяжения при деформации 30%. h Изображение поверхности FE-SEM композитного электрода PEDOT:PSS/EMIM-TCB (0,3 мас.%) на плоской подложке из PDMS после 10 000 циклов растяжения. i Изменение сопротивления ( ΔR/R 0 ) в зависимости от удлинения композитного электрода PEDOT:PSS/EMIM-TCB (0,3 мас.%) на подложке с трехмерным микроузором. j Изменение сопротивления ( ΔR/R 0 ) композитного электрода PEDOT:PSS/EMIM-TCB (0,3 мас.%) на подложке с трехмерным микроузором в зависимости от циклов растяжения при деформации 30%.
Вставка: фотография композитной пленки PEDOT:PSS/EMIM-TCB (0,3 мас.%) на плоской подложке PDMS (оранжево-пунктирная линия). f Изменение сопротивления ( ΔR/R 0 ) в зависимости от удлинения композитного электрода PEDOT:PSS/EMIM-TCB (0,3 мас.%) на плоской подложке PDMS. г Изменение сопротивления ( ΔR/R 0 ) композитного электрода PEDOT:PSS/EMIM-TCB (0,3 мас.%) на плоской подложке PDMS в зависимости от циклов растяжения при деформации 30%. h Изображение поверхности FE-SEM композитного электрода PEDOT:PSS/EMIM-TCB (0,3 мас.%) на плоской подложке из PDMS после 10 000 циклов растяжения. i Изменение сопротивления ( ΔR/R 0 ) в зависимости от удлинения композитного электрода PEDOT:PSS/EMIM-TCB (0,3 мас.%) на подложке с трехмерным микроузором. j Изменение сопротивления ( ΔR/R 0 ) композитного электрода PEDOT:PSS/EMIM-TCB (0,3 мас.%) на подложке с трехмерным микроузором в зависимости от циклов растяжения при деформации 30%. k , l Изображения поверхности FE-SEM композитного электрода PEDOT:PSS/EMIM-TCB (0,3 мас.%) на подложке с трехмерным микроузором после 10 000 циклов растяжения при k 300× и l 3000×
k , l Изображения поверхности FE-SEM композитного электрода PEDOT:PSS/EMIM-TCB (0,3 мас.%) на подложке с трехмерным микроузором после 10 000 циклов растяжения при k 300× и l 3000× Полноразмерное изображение
Чтобы преодолеть эту трудность, адекватные уровни оптического пропускания и поверхностного сопротивления могут быть достигнуты при использовании многослойной структуры GIG с ITO толщиной 50–200 нм. в качестве среднего слоя (дополнительный рис. S1a). В дополнение к листовому сопротивлению и оптическому пропусканию мы исследовали стабильность нижнего электрода GIG на подложке с трехмерным микроузором при механической деформации. Данные на дополнительном рис. S1b, e, h и рис. 2b показывают измеренные изменения сопротивления ( ΔR/R 0 , где R 0 — начальное сопротивление, а Δ R — прирост сопротивления при растяжении) конструкций из стеклопластика при статическом растяжении в диапазоне от 0 до 30 % относительного удлинения.
 ΔR / R 0 от статического растяжения постепенно уменьшалась с увеличением толщины ITO, поскольку плотность случайно генерируемых трещин уменьшалась (дополнительный рисунок S1d, g, j и рис. 2d). Электрод GIG (200 нм ITO) показал увеличение на ΔR/R 0 в ~ 45 раз при деформации 30 % после трех циклов статического растяжения (рис. 2б). Влияние повторяющихся механических деформаций на стабильность электродов GIG также исследовали с помощью испытания на циклическое растяжение, в котором измеряли ΔR/R 0 после выполнения 10, 100, 1000 и 10000 циклов растяжения с 30%-ной деформацией (рис. , S1c, f, i и рис. 2c). Результаты показали, что ΔR/R 0 увеличилось в два раза после 10 000 циклов растяжения (рис. 2в). Хотя произошла некоторая степень растрескивания, структура GIG сохранила эффективный путь тока, что привело к небольшому изменению сопротивления, что указывает на возможность использования ITO в качестве электрода TS.
ΔR / R 0 от статического растяжения постепенно уменьшалась с увеличением толщины ITO, поскольку плотность случайно генерируемых трещин уменьшалась (дополнительный рисунок S1d, g, j и рис. 2d). Электрод GIG (200 нм ITO) показал увеличение на ΔR/R 0 в ~ 45 раз при деформации 30 % после трех циклов статического растяжения (рис. 2б). Влияние повторяющихся механических деформаций на стабильность электродов GIG также исследовали с помощью испытания на циклическое растяжение, в котором измеряли ΔR/R 0 после выполнения 10, 100, 1000 и 10000 циклов растяжения с 30%-ной деформацией (рис. , S1c, f, i и рис. 2c). Результаты показали, что ΔR/R 0 увеличилось в два раза после 10 000 циклов растяжения (рис. 2в). Хотя произошла некоторая степень растрескивания, структура GIG сохранила эффективный путь тока, что привело к небольшому изменению сопротивления, что указывает на возможность использования ITO в качестве электрода TS. Как показано на рис. 2а, для изготовления устройства использовался GIG (200-нм ITO) электрод с поверхностным сопротивлением 11,5 Ом кв.
Как показано на рис. 2а, для изготовления устройства использовался GIG (200-нм ITO) электрод с поверхностным сопротивлением 11,5 Ом кв. Для исследования влияния циклического растяжения на изменение сопротивления GIG (200-нм ITO) электрода с помощью оптического микроскопа наблюдали морфологическое изменение поверхности после 10 000 циклов растяжения при деформации 30%. Оптическое изображение электрода GIG после 10 000 циклов растяжения, показанное на рис. 2d, указывает на то, что поверхностные трещины образовались в результате агрессивного циклического растяжения, и эти трещины способствовали наблюдаемому ΔR/R 0 .
Чтобы понять распределение напряжения на поверхности ITO, было проведено моделирование методом конечных элементов (FEM) для слоев ITO (толщиной 50 и 200 нм) на трехмерном микроструктурированном PDMS. Результаты на тонком образце ITO (50 нм) (дополнительный рисунок S2a) показали, что напряжение было сосредоточено на пиках ромбовидной формы, что приводило к сильно связанному растрескиванию ITO.
 Следовательно, потеря пути тока может привести к увеличению сопротивления, как это наблюдалось экспериментально (дополнительный рисунок S1d). Однако результаты моделирования на более толстом образце ITO (200 нм) (дополнительный рисунок S2b) показали более случайное распределение напряжения на пиках, так что трещины формировались неравномерно с более высокой связностью, а пути тока лучше сохранялись, что соответствовало с результатами эксперимента (рис. 2г).
Следовательно, потеря пути тока может привести к увеличению сопротивления, как это наблюдалось экспериментально (дополнительный рисунок S1d). Однако результаты моделирования на более толстом образце ITO (200 нм) (дополнительный рисунок S2b) показали более случайное распределение напряжения на пиках, так что трещины формировались неравномерно с более высокой связностью, а пути тока лучше сохранялись, что соответствовало с результатами эксперимента (рис. 2г). Чтобы четко прояснить роль ультратонких слоев Au в структуре GIG, испытания на статическое и циклическое растяжение и анализ морфологии поверхности были проведены таким же образом только для слоя ITO толщиной 200 нм (поверхностное сопротивление 31,7 Ω sq − 1 , оптический коэффициент пропускания 73,9%) на подложке с трехмерным микроузором, без наложения ультратонких слоев Au (дополнительный рисунок S3). Многослойный электрод GIG с ультратонкими слоями Au показал более низкое поверхностное сопротивление и оптический коэффициент пропускания, чем один слой ITO.
 Данные на дополнительном рисунке S3a показывают, что ΔR/R 0 в испытании на статическое растяжение увеличилось до 100 раз при деформации 30% после трех циклов удлинения от деформации 0 до 30%. Однако значение ΔR/R 0 вернулось к исходному значению. Результаты циклических испытаний после 10, 100, 1000 и 10000 циклов растяжения с деформацией 30% показали, что значение ΔR/R 0 увеличилось в 15 раз только для слоя ITO по сравнению с увеличением на коэффициент два для структуры GIG (дополнительный рис. S3b). Результаты испытаний на статическое и циклическое растяжение показали, что изменение сопротивления было значительно ниже в структуре GIG, ламинированной ультратонкими слоями Au, чем в одном только слое ITO. Изображение морфологии поверхности после 10 000 циклов растяжения показало, что на поверхности ITO образовалось больше трещин, чем на поверхности электрода GIG (дополнительный рисунок S3c). Соответственно, когда применяется механическое напряжение, ультратонкие металлические слои могут в определенной степени воспринимать напряжение, что приводит к уменьшению растрескивания в хрупком слое ITO, который, как ожидается, будет очень уязвимым для напряжения.
Данные на дополнительном рисунке S3a показывают, что ΔR/R 0 в испытании на статическое растяжение увеличилось до 100 раз при деформации 30% после трех циклов удлинения от деформации 0 до 30%. Однако значение ΔR/R 0 вернулось к исходному значению. Результаты циклических испытаний после 10, 100, 1000 и 10000 циклов растяжения с деформацией 30% показали, что значение ΔR/R 0 увеличилось в 15 раз только для слоя ITO по сравнению с увеличением на коэффициент два для структуры GIG (дополнительный рис. S3b). Результаты испытаний на статическое и циклическое растяжение показали, что изменение сопротивления было значительно ниже в структуре GIG, ламинированной ультратонкими слоями Au, чем в одном только слое ITO. Изображение морфологии поверхности после 10 000 циклов растяжения показало, что на поверхности ITO образовалось больше трещин, чем на поверхности электрода GIG (дополнительный рисунок S3c). Соответственно, когда применяется механическое напряжение, ультратонкие металлические слои могут в определенной степени воспринимать напряжение, что приводит к уменьшению растрескивания в хрупком слое ITO, который, как ожидается, будет очень уязвимым для напряжения. В дополнение к случайно соединенному ITO, даже в условиях трещины, ультратонкие слои Au с многослойной структурой помогли сформировать более эффективные пути тока, что привело к низкому поверхностному сопротивлению и меньшему изменению электрического сопротивления из-за растрескивания слоя ITO. .
В дополнение к случайно соединенному ITO, даже в условиях трещины, ультратонкие слои Au с многослойной структурой помогли сформировать более эффективные пути тока, что привело к низкому поверхностному сопротивлению и меньшему изменению электрического сопротивления из-за растрескивания слоя ITO. . Для настройки податливости и пьезорезистивности верхнего электрода в гибкий и прозрачный слой PEDOT:PSS добавляли ионную жидкость с 0,3–1 мас.% ЭМИМ-ТХБ и оценивали их оптические, электрические и механические свойства (рис. , 2e – g и дополнительный рисунок S4). EMIM-TCB в композите PEDOT:PSS/EMIM-TCB способствовал фазовому разделению PSS, что привело к структурным изменениям в слое. Кроме того, сообщалось, что по мере увеличения концентрации EMIM-TCB улучшаются проводимость и растяжимость, хотя оптическое пропускание немного снижается 36,37,38 . Поэтому мы использовали композиционные материалы PEDOT:PSS/EMIM-TCB с нанесенным центрифугированием для растяжимого и прозрачного пьезорезистивного верхнего электрода.
 Оптический коэффициент пропускания композитного электрода PEDOT:PSS/EMIM-TCB (0,3 мас.%) толщиной 300 нм, сформированного на планарной подложке PDMS, составил 84% при длине волны 550 нм (рис. 2д). Поверхностное сопротивление этого слоя составляло 130 Ом кв. -1 Ом. Данные ΔR/R 0 на дополнительных рисунках S4a и S4c показывают, что ΔR/R 0 в условиях статического растяжения увеличилось в два раза при деформации 30 % после трехкратного повторения удлинения от деформации 0 до 30 %, хотя и вернулось к исходному значению. Однако добавление более низких концентраций EMIM-TCB отрицательно повлияло на данные ΔR/R 0 после испытаний на статическое растяжение (рис. 2f). С другой стороны, результаты циклических испытаний после 10, 100, 1000 и 10 000 циклов растяжения с 30-процентной деформацией показали, что ΔR/R 0 значение увеличилось до двух раз для образцов с 0,5 и 1 % масс.
Оптический коэффициент пропускания композитного электрода PEDOT:PSS/EMIM-TCB (0,3 мас.%) толщиной 300 нм, сформированного на планарной подложке PDMS, составил 84% при длине волны 550 нм (рис. 2д). Поверхностное сопротивление этого слоя составляло 130 Ом кв. -1 Ом. Данные ΔR/R 0 на дополнительных рисунках S4a и S4c показывают, что ΔR/R 0 в условиях статического растяжения увеличилось в два раза при деформации 30 % после трехкратного повторения удлинения от деформации 0 до 30 %, хотя и вернулось к исходному значению. Однако добавление более низких концентраций EMIM-TCB отрицательно повлияло на данные ΔR/R 0 после испытаний на статическое растяжение (рис. 2f). С другой стороны, результаты циклических испытаний после 10, 100, 1000 и 10 000 циклов растяжения с 30-процентной деформацией показали, что ΔR/R 0 значение увеличилось до двух раз для образцов с 0,5 и 1 % масс.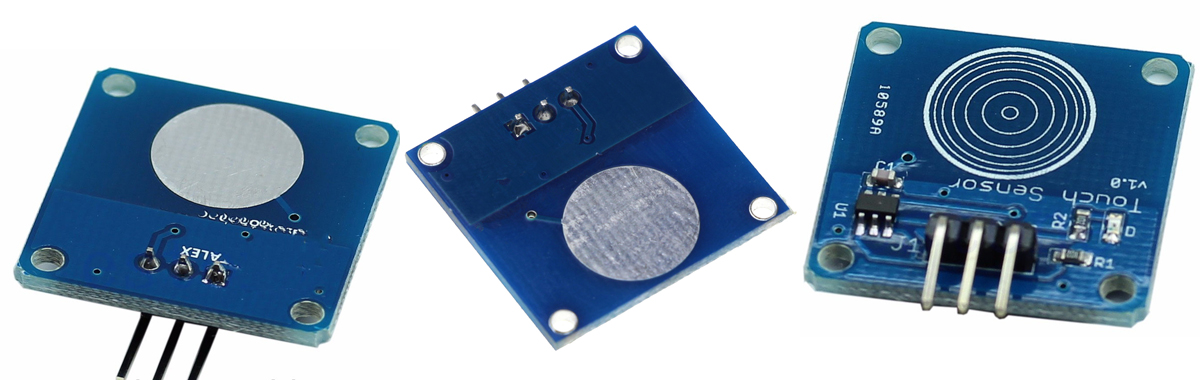 EMIM-TCB (дополнительный рис. S4b, d) по сравнению с коэффициентом 0,17 для PEDOT:PSS с 0,3 мас.% ЭМИМ-ТХБ (рис. 2ж). Эти результаты испытаний на циклическое растяжение показали, что изменение сопротивления было значительно ниже для PEDOT:PSS/EMIM-TCB (0,3 мас.%), чем для образцов с более высокой концентрацией EMIM-TCB (рис. 2g). Кроме того, растворы с > 1 % масс. EMIM-TCB были слишком вязкими для обработки раствором и осаждались из-за агрегации. По мере постепенного увеличения концентрации EMIM-TCB, смешанного с PEDOT:PSS, увеличивается вязкость и усиливается тенденция к образованию геля 38 . В этом случае характеристики расширения и сжатия предположительно улучшаются, но механические свойства могут ухудшаться при повторных деформациях. Поэтому концентрация EMIM-TCB была оптимизирована примерно до 0,3% масс. для получения лучшей однородности и механической стабильности в верхнем электродном слое.
EMIM-TCB (дополнительный рис. S4b, d) по сравнению с коэффициентом 0,17 для PEDOT:PSS с 0,3 мас.% ЭМИМ-ТХБ (рис. 2ж). Эти результаты испытаний на циклическое растяжение показали, что изменение сопротивления было значительно ниже для PEDOT:PSS/EMIM-TCB (0,3 мас.%), чем для образцов с более высокой концентрацией EMIM-TCB (рис. 2g). Кроме того, растворы с > 1 % масс. EMIM-TCB были слишком вязкими для обработки раствором и осаждались из-за агрегации. По мере постепенного увеличения концентрации EMIM-TCB, смешанного с PEDOT:PSS, увеличивается вязкость и усиливается тенденция к образованию геля 38 . В этом случае характеристики расширения и сжатия предположительно улучшаются, но механические свойства могут ухудшаться при повторных деформациях. Поэтому концентрация EMIM-TCB была оптимизирована примерно до 0,3% масс. для получения лучшей однородности и механической стабильности в верхнем электродном слое. Морфологические изменения поверхности композитного слоя PEDOT:PSS/EMIM-TCB (0,3 мас.
 %) на плоском PDMS после 10 000 циклов растяжения при деформации 30% исследовали с помощью FE-SEM (рис. 2h). Изображения FE-SEM показали образование складок на поверхности в направлении растяжения. Складки, по-видимому, возникли во время циклического растяжения, что может способствовать улучшению механической стабильности слоя 9.1145 39,40 . На рис. 2и, к показаны значения ΔR/R 0 композитного слоя PEDOT:PSS/EMIM-TCB (0,3 мас.%) на подложке с трехмерным микрорельефом в ходе испытаний на статическое и циклическое растяжение. Значение ΔR/R 0 увеличилось только в 0,49 раза при деформации 30 % и не показало гистерезиса в изменении сопротивления. Кроме того, значение ΔR/R 0 увеличилось всего в 0,1 раза после 10 000 циклов растяжения при деформации 30%. Оказалось, что ламинирование композитного электрода TS на подложке с трехмерным микрорельефом дает большее улучшение механической стабильности, чем на плоской подложке.
%) на плоском PDMS после 10 000 циклов растяжения при деформации 30% исследовали с помощью FE-SEM (рис. 2h). Изображения FE-SEM показали образование складок на поверхности в направлении растяжения. Складки, по-видимому, возникли во время циклического растяжения, что может способствовать улучшению механической стабильности слоя 9.1145 39,40 . На рис. 2и, к показаны значения ΔR/R 0 композитного слоя PEDOT:PSS/EMIM-TCB (0,3 мас.%) на подложке с трехмерным микрорельефом в ходе испытаний на статическое и циклическое растяжение. Значение ΔR/R 0 увеличилось только в 0,49 раза при деформации 30 % и не показало гистерезиса в изменении сопротивления. Кроме того, значение ΔR/R 0 увеличилось всего в 0,1 раза после 10 000 циклов растяжения при деформации 30%. Оказалось, что ламинирование композитного электрода TS на подложке с трехмерным микрорельефом дает большее улучшение механической стабильности, чем на плоской подложке. Таким образом, раствор PEDOT:PSS с 0,3% масс. EMIM-TCB использовался для получения высокой растяжимости с использованием подложки с трехмерным микроузором, при этом она была очень чувствительной к давлению. Морфологическое изменение поверхности композитного электрода на подложке с трехмерным микроузором, наблюдаемое с помощью FE-SEM после применения 10 000 циклов растяжения, также указывает на образование морщин на поверхности (рис. 2k). Изображение FE-SEM с большим увеличением холмистой области подложки на рис. 2l показывает, что меньше складок образовалось на композитном слое PEDOT:PSS/EMIM-TCB на подложке с трехмерным микроузором по сравнению с плоской поверхностью подложки из PDMS. на рис. 2з. Таким образом, композитные электроды GIG и PEDOT:PSS/EMIM-TCB (0,3 мас.%) использовались в качестве нижнего и верхнего электродов, соответственно, для изготовления бимодального датчика давления прикосновения TS.
Таким образом, раствор PEDOT:PSS с 0,3% масс. EMIM-TCB использовался для получения высокой растяжимости с использованием подложки с трехмерным микроузором, при этом она была очень чувствительной к давлению. Морфологическое изменение поверхности композитного электрода на подложке с трехмерным микроузором, наблюдаемое с помощью FE-SEM после применения 10 000 циклов растяжения, также указывает на образование морщин на поверхности (рис. 2k). Изображение FE-SEM с большим увеличением холмистой области подложки на рис. 2l показывает, что меньше складок образовалось на композитном слое PEDOT:PSS/EMIM-TCB на подложке с трехмерным микроузором по сравнению с плоской поверхностью подложки из PDMS. на рис. 2з. Таким образом, композитные электроды GIG и PEDOT:PSS/EMIM-TCB (0,3 мас.%) использовались в качестве нижнего и верхнего электродов, соответственно, для изготовления бимодального датчика давления прикосновения TS. Оценка одиночного датчика давления прикосновения и массива TS
В качестве следующего шага в этом исследовании была предпринята попытка улучшить чувствительность предлагаемого датчика к раздражителям прикосновения и давления и оценить его работу.
 Реакции сенсора на прикосновение и давление измерялись путем подачи переменного импульсного напряжения −3 ~ 3 В с частотой 10 Гц на верхний электрод с помощью функционального генератора, а мгновенный ток на нижнем электроде измерялся с помощью источника измерения. Ед. изм. Известно, что диапазон давления для осязания находится в диапазоне тонкого давления ниже 1 кПа9.1145 41 . Значение давления во время прикосновения пальца в нашем эксперименте было измерено примерно как 0,5 кПа с помощью датчика силы. Экспериментальные данные на дополнительном рисунке S5 были получены для определения и сравнения характеристик бимодального датчика давления прикосновения TS на плоских и трехмерных подложках с микроузором. Отдельные устройства были изготовлены на плоских (дополнительная рис. S5a) и трехмерных подложках из PDMS с микроузором (дополнительная рис. S5b). Сравнивались характеристики этих двух датчиков. В этом эксперименте для выяснения механизма датчика в качестве нижнего электрода использовался Au-электрод, а в качестве верхнего — пьезорезистивный композит PEDOT:PSS/PU.
Реакции сенсора на прикосновение и давление измерялись путем подачи переменного импульсного напряжения −3 ~ 3 В с частотой 10 Гц на верхний электрод с помощью функционального генератора, а мгновенный ток на нижнем электроде измерялся с помощью источника измерения. Ед. изм. Известно, что диапазон давления для осязания находится в диапазоне тонкого давления ниже 1 кПа9.1145 41 . Значение давления во время прикосновения пальца в нашем эксперименте было измерено примерно как 0,5 кПа с помощью датчика силы. Экспериментальные данные на дополнительном рисунке S5 были получены для определения и сравнения характеристик бимодального датчика давления прикосновения TS на плоских и трехмерных подложках с микроузором. Отдельные устройства были изготовлены на плоских (дополнительная рис. S5a) и трехмерных подложках из PDMS с микроузором (дополнительная рис. S5b). Сравнивались характеристики этих двух датчиков. В этом эксперименте для выяснения механизма датчика в качестве нижнего электрода использовался Au-электрод, а в качестве верхнего — пьезорезистивный композит PEDOT:PSS/PU. Датчик на плоской подложке PDMS не мог различать стимулы прикосновения и давления. С другой стороны, датчик, изготовленный на подложке PDMS с трехмерным микроузором, продемонстрировал усиленную реакцию на стимул давления, отличающийся от реакции на сенсорный стимул. Когда к каждому устройству прикладывалось одинаковое давление, пьезорезистивный электрод на пиках на подложке с трехмерным микроузором подвергался большей деформации, чем на плоской поверхности, что приводило к большему изменению сопротивления и падению напряжения на верхнем электроде. Следовательно, сигнал тока, считываемый с нижнего электрода, уменьшался, и давление можно было эффективно и отчетливо определять.
Датчик на плоской подложке PDMS не мог различать стимулы прикосновения и давления. С другой стороны, датчик, изготовленный на подложке PDMS с трехмерным микроузором, продемонстрировал усиленную реакцию на стимул давления, отличающийся от реакции на сенсорный стимул. Когда к каждому устройству прикладывалось одинаковое давление, пьезорезистивный электрод на пиках на подложке с трехмерным микроузором подвергался большей деформации, чем на плоской поверхности, что приводило к большему изменению сопротивления и падению напряжения на верхнем электроде. Следовательно, сигнал тока, считываемый с нижнего электрода, уменьшался, и давление можно было эффективно и отчетливо определять. Для измерения и сравнения чувствительности к раздражителям прикосновения и давления в зависимости от толщины диэлектрического слоя ПУ, изменения тока и емкости устройств с верхними электродами из ПЭДОТ:ПСС/ЭМИМ-ТХБ (0,3 мас.%) и нижними электродами из Золото на подложках с трехмерным микрорельефом измеряли для слоев ПУ толщиной 6,8, 3,8 и 2,7 мкм (рис.
Рис. 3: Систематические тесты отклика сенсоров давления прикосновения. 3а–ж). Данные тока (рис. 3a–c) и емкости (рис. 3e–g) устройств с различной толщиной слоя PU были измерены для стимулов прикосновения и давления. Токовые отклики устройства с толщиной ПУ 2,7 мкм при давлениях 5, 10, 15 и 20 кПа представлены на рис. 3з–л. Чувствительность устройств с различной толщиной полиуретана к прикосновению и чувствительность устройства к давлению с разным давлением отображаются как изменение тока ( ΔI/I 0 ) на рис. 3г, м соответственно. Все результаты на рис. 3 были получены при касании и надавливании пальцами. Давление при прикосновении (~ 0,5 кПа) и давление от усилия пальца контролировали с помощью датчика силы. Токовый отклик устройства с полиуретановым слоем толщиной 6,8 мкм на сенсорный стимул составлял всего -6,3% (рис. 3а), а токовый отклик устройств с меньшим слоем ПУ толщиной 3,8 и 2,7 мкм на сенсорный стимул увеличилась до -14,0 и -23,4% соответственно, как показано на рис. 3d. В целом, реакция на прикосновение усиливалась при использовании более тонких полиуретановых диэлектрических слоев.
3а–ж). Данные тока (рис. 3a–c) и емкости (рис. 3e–g) устройств с различной толщиной слоя PU были измерены для стимулов прикосновения и давления. Токовые отклики устройства с толщиной ПУ 2,7 мкм при давлениях 5, 10, 15 и 20 кПа представлены на рис. 3з–л. Чувствительность устройств с различной толщиной полиуретана к прикосновению и чувствительность устройства к давлению с разным давлением отображаются как изменение тока ( ΔI/I 0 ) на рис. 3г, м соответственно. Все результаты на рис. 3 были получены при касании и надавливании пальцами. Давление при прикосновении (~ 0,5 кПа) и давление от усилия пальца контролировали с помощью датчика силы. Токовый отклик устройства с полиуретановым слоем толщиной 6,8 мкм на сенсорный стимул составлял всего -6,3% (рис. 3а), а токовый отклик устройств с меньшим слоем ПУ толщиной 3,8 и 2,7 мкм на сенсорный стимул увеличилась до -14,0 и -23,4% соответственно, как показано на рис. 3d. В целом, реакция на прикосновение усиливалась при использовании более тонких полиуретановых диэлектрических слоев. Однако при толщине ПУ 2,2 и 2,5 мкм ток срабатывания не изменился, что связано с высокой утечкой более тонких слоев ПУ, соответствующей уровню при нормальной работе датчика без прикосновения. С другой стороны, емкость изменяется ( ΔC/C 0 ) устройств с разной толщиной слоя полиуретана, измеренных для двух стимулов, не показали существенной разницы в ответах на прикосновение и давление, хотя ответ ΔC/C 0 увеличился с уменьшение толщины слоя ПУ (рис. 3д–ж). Чтобы подтвердить изменение емкости, вызванное давлением пальца, к датчику с толщиной слоя ПУ было приложено давление 20 кПа (дополнительный рисунок S6a), 40 кПа (дополнительный рисунок S6b) и 80 кПа (дополнительный рисунок S6c). 2,7 мкм, изготовленных на подложке с трехмерным микрорельефом. Давление поддерживалось с помощью манометра. При давлениях 20 и 40 кПа изменение емкости не происходило, тогда как при высоком давлении 80 кПа она значительно уменьшалась. 9Отклик 0563 ΔC/C 0 существенно не изменился в диапазоне низких давлений, предположительно из-за того, что верхняя часть площади пика в зоне давления, соответствующая лишь небольшой части общей площади, была деформирована и , в свою очередь, изменение емкости было незначительным.
Однако при толщине ПУ 2,2 и 2,5 мкм ток срабатывания не изменился, что связано с высокой утечкой более тонких слоев ПУ, соответствующей уровню при нормальной работе датчика без прикосновения. С другой стороны, емкость изменяется ( ΔC/C 0 ) устройств с разной толщиной слоя полиуретана, измеренных для двух стимулов, не показали существенной разницы в ответах на прикосновение и давление, хотя ответ ΔC/C 0 увеличился с уменьшение толщины слоя ПУ (рис. 3д–ж). Чтобы подтвердить изменение емкости, вызванное давлением пальца, к датчику с толщиной слоя ПУ было приложено давление 20 кПа (дополнительный рисунок S6a), 40 кПа (дополнительный рисунок S6b) и 80 кПа (дополнительный рисунок S6c). 2,7 мкм, изготовленных на подложке с трехмерным микрорельефом. Давление поддерживалось с помощью манометра. При давлениях 20 и 40 кПа изменение емкости не происходило, тогда как при высоком давлении 80 кПа она значительно уменьшалась. 9Отклик 0563 ΔC/C 0 существенно не изменился в диапазоне низких давлений, предположительно из-за того, что верхняя часть площади пика в зоне давления, соответствующая лишь небольшой части общей площади, была деформирована и , в свою очередь, изменение емкости было незначительным.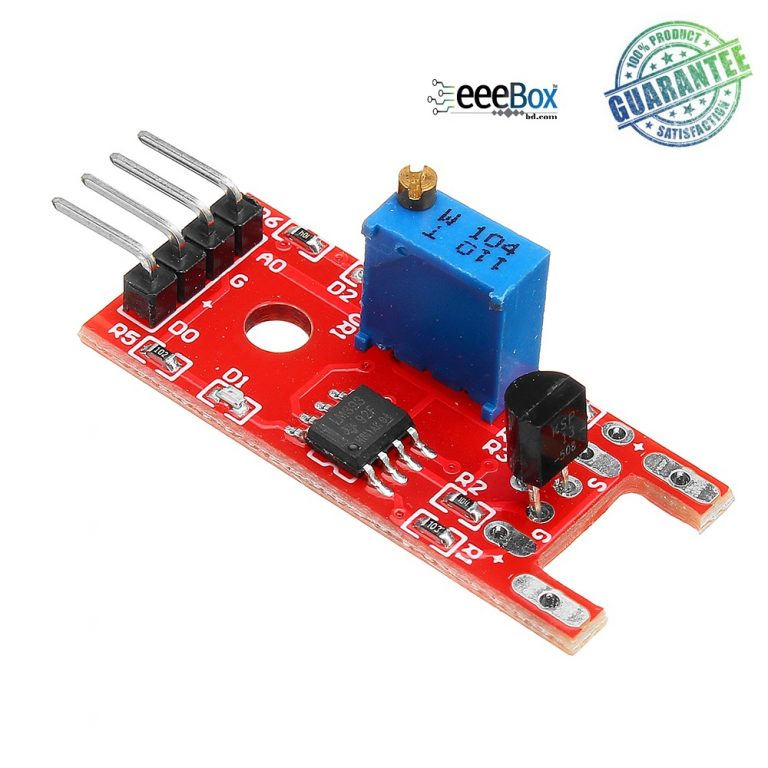 Таким образом, отклик датчика на давление не был вызван изменением емкости из-за уменьшения толщины диэлектрического слоя, хотя при повышенном давлении 80 кПа емкость может частично способствовать уменьшению тока отклика.
Таким образом, отклик датчика на давление не был вызван изменением емкости из-за уменьшения толщины диэлектрического слоя, хотя при повышенном давлении 80 кПа емкость может частично способствовать уменьшению тока отклика. a – c Ток датчика давления прикосновения в зависимости от времени при прогрессивно уменьшающейся толщине слоя полиуретана: a 6,8 мкм, b 3,8 мкм и c 2,7 мкм при воздействии сенсорного стимула. d Изменение тока ( ΔI/I 0 ) датчика давления прикосновения с различной толщиной диэлектрического слоя ПУ от 2,2 до 6,8 мкм в ответ на прикосновение. e – g Capacitance change ( ΔC/C 0 ) versus voltage under progressively decreasing PU layer thickness to e 6.8 μm, f 3.8 μm, and g 2.7 μm under touch — раздражители давления.
 ч – к Ток сенсора давления в зависимости от времени приложения давления ч 5 кПа, i 10 кПа, j 15 кПа и кПа л Текущее изменение ( ΔI/I 0 ) датчика, реагирующего на различные приложенные давления
ч – к Ток сенсора давления в зависимости от времени приложения давления ч 5 кПа, i 10 кПа, j 15 кПа и кПа л Текущее изменение ( ΔI/I 0 ) датчика, реагирующего на различные приложенные давления Изображение в натуральную величину
Чувствительность к давлению была количественно оценена путем приложения различной силы с использованием силовой машины. К устройству прикладывали давление 5–20 кПа в течение 1 с, а оценку проводили по трем измерениям силы тока для каждого значения силы. Реакции тока на давление 5 кПа (рис. 3h), 10 кПа (рис. 3i), 15 кПа (рис. 3j) и 20 кПа (рис. 3k) показали, что чем сильнее было давление, тем ниже ток. . Эти результаты связаны с увеличением сопротивления пьезорезистивного композитного электрода PEDOT:PSS/EMIM-TCB (0,3 мас.%) из-за воздействия внешнего давления, что привело к падению напряжения на верхнем электроде с последующим уменьшением тока. . Чтобы подтвердить роль верхнего электрода в измерении силы, был изготовлен датчик с использованием пьезорезистивного композитного слоя PEDOT:PSS/EMIM-TCB только на подложке с трехмерным микроузором, и было измерено изменение сопротивления при каждом давлении.
 Данные на дополнительном рисунке S7 показывают, что изменение сопротивления было незначительным при давлении прикосновения 0,5 кПа, в то время как изменение постепенно увеличивалось с увеличением давления. Таким образом, было подтверждено, что способность воспринимать давление во время приложения силы может быть приписана изменению сопротивления верхнего электрода, а не изменению емкости. Этот принцип позволяет отличить стимул давления от раздражителя прикосновения. По данным рис. 3l чувствительность к давлению составила примерно 90,2%/кПа. При 20 кПа чувствительность к давлению была насыщена на уровне -99,6%. Эти результаты показывают, что стимул давления не может быть обнаружен и отличен от прикосновения с помощью измерений изменения емкости, но может быть обнаружен с помощью модуляции тока из-за изменения сопротивления пьезорезистивного верхнего электрода под действием силы.
Данные на дополнительном рисунке S7 показывают, что изменение сопротивления было незначительным при давлении прикосновения 0,5 кПа, в то время как изменение постепенно увеличивалось с увеличением давления. Таким образом, было подтверждено, что способность воспринимать давление во время приложения силы может быть приписана изменению сопротивления верхнего электрода, а не изменению емкости. Этот принцип позволяет отличить стимул давления от раздражителя прикосновения. По данным рис. 3l чувствительность к давлению составила примерно 90,2%/кПа. При 20 кПа чувствительность к давлению была насыщена на уровне -99,6%. Эти результаты показывают, что стимул давления не может быть обнаружен и отличен от прикосновения с помощью измерений изменения емкости, но может быть обнаружен с помощью модуляции тока из-за изменения сопротивления пьезорезистивного верхнего электрода под действием силы. Механическая стабильность и долговечность датчика с верхним электродом из PEDOT:PSS/EMIM-TCB (0,3 мас.
Рис. 4: Испытания на растяжение прозрачного и растяжимого одинарного и матричного датчика давления прикосновения 4 × 4. %) и нижним электродом GIG (200 нм ITO) оценивались путем измерения и сравнения чувствительности в условиях статического растяжения. в диапазоне деформаций растяжения 0–30% удлинения (рис. 4а) и после циклического растяжения с деформацией 30% до 10 000 циклов растяжения (рис. 4б). Результаты измерений до растяжения показаны на дополнительном рисунке S8a. Результаты обнаружения были получены путем применения удлинения на 10, 20 и 30%, и результаты представлены на дополнительном рисунке S8b – d. Хотя увеличение напряжения сопровождалось снижением базового тока, можно было эффективно воспринимать стимулы прикосновения и давления. Предположительно, уменьшение базового тока при растяжении было вызвано уплощением конструкции прибора при растяжении, что привело к увеличению сопротивления верхнего электрода. Когда устройство было растянуто до 30% удлинения, а затем возвращено к 20, 10 и 0%, базовый ток был восстановлен, и оба стимула были хорошо обнаружены (дополнительный рисунок S8e-g). На рис.
%) и нижним электродом GIG (200 нм ITO) оценивались путем измерения и сравнения чувствительности в условиях статического растяжения. в диапазоне деформаций растяжения 0–30% удлинения (рис. 4а) и после циклического растяжения с деформацией 30% до 10 000 циклов растяжения (рис. 4б). Результаты измерений до растяжения показаны на дополнительном рисунке S8a. Результаты обнаружения были получены путем применения удлинения на 10, 20 и 30%, и результаты представлены на дополнительном рисунке S8b – d. Хотя увеличение напряжения сопровождалось снижением базового тока, можно было эффективно воспринимать стимулы прикосновения и давления. Предположительно, уменьшение базового тока при растяжении было вызвано уплощением конструкции прибора при растяжении, что привело к увеличению сопротивления верхнего электрода. Когда устройство было растянуто до 30% удлинения, а затем возвращено к 20, 10 и 0%, базовый ток был восстановлен, и оба стимула были хорошо обнаружены (дополнительный рисунок S8e-g). На рис.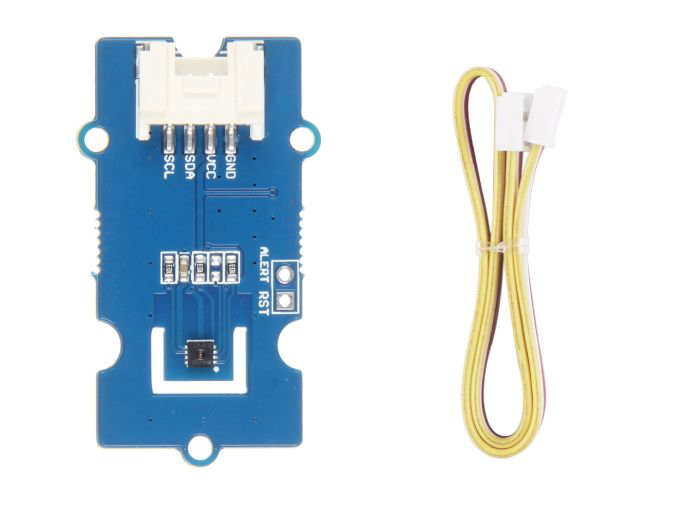 4а показана чувствительность устройства к двум стимулам в условиях статического растяжения. Когда напряжение растяжения, приложенное к датчику, увеличивалось от 0 до 30%, чувствительность к двум стимулам стабильно поддерживалась, что указывает на способность обнаруживать и различать прикосновение и давление даже в условиях растяжения. Затем оценивали механическую стабильность путем многократного применения 30%-ного растяжения и последовательного измерения текущих ответов на стимулы прикосновения и давления. Данные на дополнительном рисунке S8h представляют результаты, полученные до циклического растяжения. Данные измерений, полученные после 100, 1000 и 10 000 циклов растяжения, показаны на дополнительном рисунке S8i – k. Даже после 10 000 циклов растяжения базовый ток в определенной степени сохранялся, и два стимула можно было различить и обнаружить. Чувствительность устройства к прикосновению и давлению после различных циклов растяжения (рис. 4b) показала, что датчик сохранял свою чувствительность даже после 10 000 циклов растяжения при 30% деформации.
4а показана чувствительность устройства к двум стимулам в условиях статического растяжения. Когда напряжение растяжения, приложенное к датчику, увеличивалось от 0 до 30%, чувствительность к двум стимулам стабильно поддерживалась, что указывает на способность обнаруживать и различать прикосновение и давление даже в условиях растяжения. Затем оценивали механическую стабильность путем многократного применения 30%-ного растяжения и последовательного измерения текущих ответов на стимулы прикосновения и давления. Данные на дополнительном рисунке S8h представляют результаты, полученные до циклического растяжения. Данные измерений, полученные после 100, 1000 и 10 000 циклов растяжения, показаны на дополнительном рисунке S8i – k. Даже после 10 000 циклов растяжения базовый ток в определенной степени сохранялся, и два стимула можно было различить и обнаружить. Чувствительность устройства к прикосновению и давлению после различных циклов растяжения (рис. 4b) показала, что датчик сохранял свою чувствительность даже после 10 000 циклов растяжения при 30% деформации.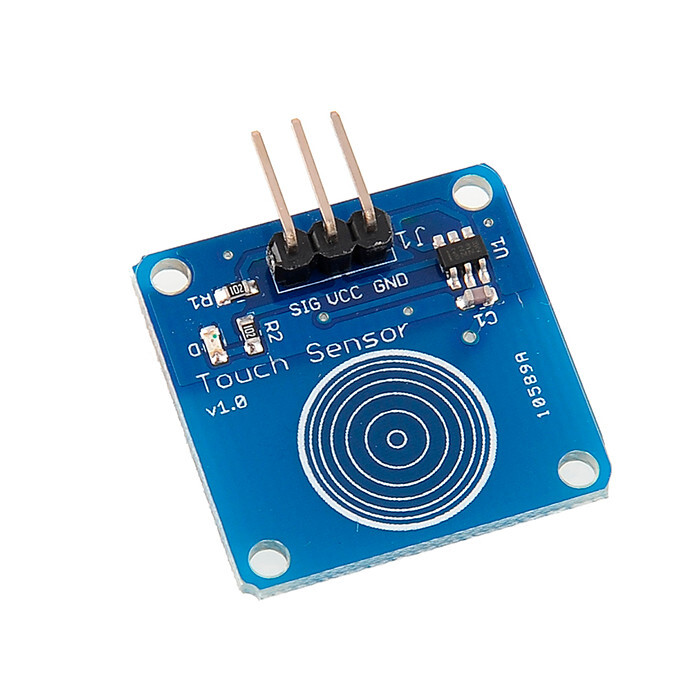 Оптические изображения на рис. 4с показывают прозрачный и растягиваемый датчик давления прикосновения до и после растяжения (30%). При рассмотрении аналогичных отношений деформации и напряжения плоских и трехмерных подложек с микроузором с верхними или нижними электродами (дополнительный рис. S9а) и одно устройство (дополнительный рис. S9b) на них до 30% деформации, трехмерный микрорисунок на подложке ПДМС повышает механическую стабильность электродов и устройства за счет эффективного снятия деформации слоев.
Оптические изображения на рис. 4с показывают прозрачный и растягиваемый датчик давления прикосновения до и после растяжения (30%). При рассмотрении аналогичных отношений деформации и напряжения плоских и трехмерных подложек с микроузором с верхними или нижними электродами (дополнительный рис. S9а) и одно устройство (дополнительный рис. S9b) на них до 30% деформации, трехмерный микрорисунок на подложке ПДМС повышает механическую стабильность электродов и устройства за счет эффективного снятия деформации слоев. a Чувствительность одиночного датчика при статическом растяжении от 0 до 30% при прикосновении (черный) и надавливании (синий). б Чувствительность одиночного датчика в зависимости от циклов растяжения на 30% при прикосновении (черный цвет) и надавливании (синий цвет). c Фотографии одного датчика с растяжением 0% (вверху) и 30% (внизу) во время теста на растяжение.
 d Фотография массива датчиков 4 × 4. e , f Текущее изменение ( ΔI/I 0 ) массива при e 0% и f 30% деформации при касании (бар) и давлении)0003
d Фотография массива датчиков 4 × 4. e , f Текущее изменение ( ΔI/I 0 ) массива при e 0% и f 30% деформации при касании (бар) и давлении)0003 Полноразмерное изображение
Мы также изготовили массив сенсорных датчиков давления 4 × 4 TS с общей площадью 40 × 60 мм 2 и один датчик размером 19,6 мм 2 на подложке с трехмерным микрорельефом, используя Электроды ТС описаны выше (рис. 4г). Результаты текущей чувствительности ( ΔI/I 0 ) на два стимула, приложенных к каждому датчику массива 4 × 4, показаны на рис. 4e. Большинство датчиков в массиве показали значения чувствительности, близкие к -20% и -98% для прикосновения и давления соответственно. Результаты оценки каждого датчика в массиве показаны на дополнительном рисунке S10. ΔI/I 0 чувствительность массива 4 × 4 также была измерена путем приложения двух стимулов к каждому датчику при 30% растяжении для оценки их механической стабильности (рис.
 4f). В растянутом состоянии большинство датчиков сохраняли чувствительность, сравнимую с чувствительностью датчика без растяжения. Результаты оценки для каждого датчика при удлинении 30% также показаны на дополнительном рисунке S11. Все работающие датчики обнаруживали и различали раздражители прикосновения и давления. Результаты на рис. 4 и дополнительных рис. S8–S11 указывают на высокую растяжимость, долговечность и хорошую чувствительность бимодального сенсора TS к раздражителям прикосновения и давления.
4f). В растянутом состоянии большинство датчиков сохраняли чувствительность, сравнимую с чувствительностью датчика без растяжения. Результаты оценки для каждого датчика при удлинении 30% также показаны на дополнительном рисунке S11. Все работающие датчики обнаруживали и различали раздражители прикосновения и давления. Результаты на рис. 4 и дополнительных рис. S8–S11 указывают на высокую растяжимость, долговечность и хорошую чувствительность бимодального сенсора TS к раздражителям прикосновения и давления. Демонстрация взаимодействия человека и машины с использованием массива датчиков давления прикосновения
Мы продемонстрировали, что набор датчиков давления прикосновения TS (4 × 4) можно использовать для взаимодействия человека с машиной. Здесь проводились демонстрации управляемого свечения светодиодов (LED) и движения маленькой игрушечной машинки. Аналоговая схема, состоящая из трансимпедансного усилителя и операционного усилителя, использовалась для получения и усиления выходного сигнала массива датчиков соответственно.
Рис. 5: Демонстрация массива датчиков давления прикосновения 4 × 4. Для обработки данных был использован специальный код, написанный в Arduino IDE, работающий в Arduino® UNO, чтобы различать сигналы касания и давления от датчика. На рис. 5а показана схема сбора данных с матрицы датчиков давления прикосновения. На рис. 5b показана программа для первой демонстрации, которая управляет загоранием зеленых и красных светодиодов посредством прикосновения и давления соответственно через два порта Arduino® UNO. При прикосновении к датчику мигает зеленый светодиод; при нажатии на датчик мигает красный светодиод (рис. 5c и фильм S1). Данные в реальном времени, полученные с помощью осциллографа, применяющего стимулы, также нанесены на рис. 5d для лучшего понимания обработки сигналов для стимулов прикосновения и давления. Для второй демонстрации массив был установлен на предплечье и использовался для беспроводного управления маленькой игрушечной машинкой с помощью модуля Bluetooth® HC-05. Мы использовали три устройства из массива датчиков 4 × 4 для беспроводного вождения и управления самодельной игрушечной машинкой в трех направлениях (вперед, влево и вправо) на низкой и высокой скоростях (рис.
Для обработки данных был использован специальный код, написанный в Arduino IDE, работающий в Arduino® UNO, чтобы различать сигналы касания и давления от датчика. На рис. 5а показана схема сбора данных с матрицы датчиков давления прикосновения. На рис. 5b показана программа для первой демонстрации, которая управляет загоранием зеленых и красных светодиодов посредством прикосновения и давления соответственно через два порта Arduino® UNO. При прикосновении к датчику мигает зеленый светодиод; при нажатии на датчик мигает красный светодиод (рис. 5c и фильм S1). Данные в реальном времени, полученные с помощью осциллографа, применяющего стимулы, также нанесены на рис. 5d для лучшего понимания обработки сигналов для стимулов прикосновения и давления. Для второй демонстрации массив был установлен на предплечье и использовался для беспроводного управления маленькой игрушечной машинкой с помощью модуля Bluetooth® HC-05. Мы использовали три устройства из массива датчиков 4 × 4 для беспроводного вождения и управления самодельной игрушечной машинкой в трех направлениях (вперед, влево и вправо) на низкой и высокой скоростях (рис. 5e). Для каждого из трех выбранных датчиков прикосновение к датчику заставляло автомобиль медленно двигаться в указанном направлении, в то время как приложение давления к тому же датчику увеличивало скорость автомобиля в том же направлении (Фильм S2). Для этой второй демонстрации на рис. 5f кратко поясняется программный поток «ведущей стороны», которая является стороной приема сигнала, и «ведомой стороны», которая является стороной выполнения команды (игрушечной машинкой).
5e). Для каждого из трех выбранных датчиков прикосновение к датчику заставляло автомобиль медленно двигаться в указанном направлении, в то время как приложение давления к тому же датчику увеличивало скорость автомобиля в том же направлении (Фильм S2). Для этой второй демонстрации на рис. 5f кратко поясняется программный поток «ведущей стороны», которая является стороной приема сигнала, и «ведомой стороны», которая является стороной выполнения команды (игрушечной машинкой). a Схема процесса сбора данных. b Процесс демонстрации управления светодиодным освещением. c Мигание зеленого и красного светодиодов для обнаружения прикосновения и нажатия соответственно. Данные выходного напряжения в реальном времени, обработанные по сигналам прикосновения и давления датчика, также видны на осциллографе. d Обработанные данные в режиме реального времени на экране осциллографа, полученные при касании, нажатии и в нормальных состояниях.
 e 4 × 4 массива сенсорных датчиков давления, прикрепленных к предплечью, управляющих самодельной игрушечной машинкой, движущейся в разных направлениях. f Процесс демонстрации управления беспроводным игрушечным автомобилем
e 4 × 4 массива сенсорных датчиков давления, прикрепленных к предплечью, управляющих самодельной игрушечной машинкой, движущейся в разных направлениях. f Процесс демонстрации управления беспроводным игрушечным автомобилем Изображение в полный размер
Обсуждение
В этом исследовании изучался датчик TS, способный обнаруживать и различать прикосновение и давление. Мультимодальность прикосновения и давления в одном сенсорном устройстве может быть эффективной альтернативой традиционным подходам, в которых интегрируются два сенсора с одной модальностью. Реализация бимодальности сила (давление)-прикосновение с функциями растяжимости и оптической прозрачности в носимых устройствах ввода потребует новых подходов к конструкции материалов и устройств, чему препятствуют проблемы в разработке материалов с соответствующими многофункциональными свойствами и структурами устройств для обнаружения различимых сигналов. с одного устройства. Здесь мы предлагаем новый подход с использованием материалов с высоким пьезорезистивным сопротивлением в качестве верхнего электрода в структуре емкостного типа, так что приложение давления к датчику модулирует удельное сопротивление и, в свою очередь, ток, индуцируемый между двумя электродами в конденсаторе.
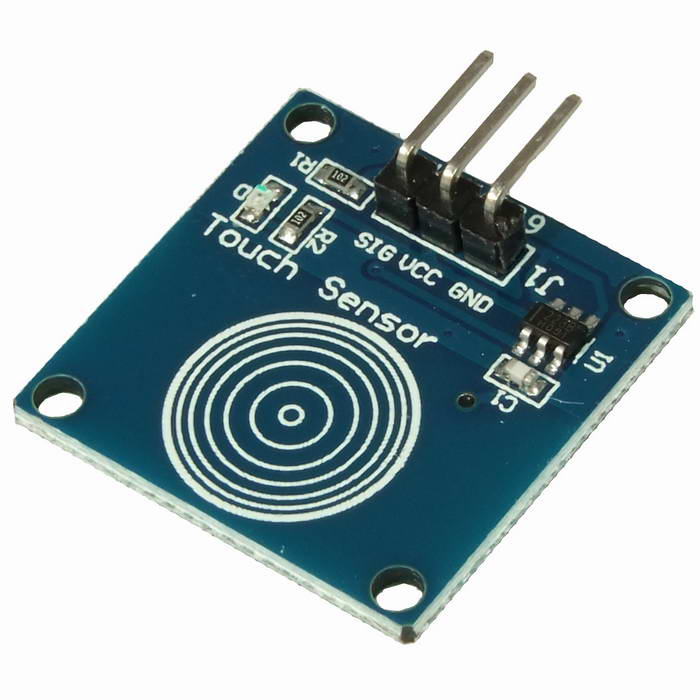 Таким образом, сенсорный стимул обнаруживается путем измерения тока, вызванного изменением емкости, в то время как стимул давления обнаруживается посредством уменьшения тока, вызванного падением напряжения, вызванным увеличением сопротивления в верхнем электроде. Этот новый дизайн материалов, структура устройства и методы считывания сигналов позволили обнаруживать и идентифицировать оба типа стимулов.
Таким образом, сенсорный стимул обнаруживается путем измерения тока, вызванного изменением емкости, в то время как стимул давления обнаруживается посредством уменьшения тока, вызванного падением напряжения, вызванным увеличением сопротивления в верхнем электроде. Этот новый дизайн материалов, структура устройства и методы считывания сигналов позволили обнаруживать и идентифицировать оба типа стимулов. Оптическая прозрачность и способность к растяжению пьезорезистивного электрода для определения силы были достигнуты за счет сочетания податливого нанокомпозита, изготовленного из проводящего полимера, PEDOT:PSS/EMIM-TCB, с трехмерной геометрической инженерией на подложке из PDMS с трехмерным микроузором. Формирование податливого проводящего полимерного композита на подложке PDMS с трехмерным микроузором также позволило получить высокую чувствительность к давлению из-за большей деформации на пиках при вертикальном давлении. Еще одной задачей было изготовление ТС-электрода с высокой механической растяжимостью, оптической прозрачностью и электропроводностью.
 Хотя обычные материалы ITO были протестированы для использования в качестве растягиваемых электродов, циклическое растяжение вызывает сильное растрескивание тонких пленок ITO, а их механическая и электрическая стабильность очень плохи 42,43,44 . Электрод GIG на основе прозрачных, проводящих, но хрупких тонких пленок ITO, зажатых между ультратонкими металлическими слоями, сформированными на снимающей напряжения эластомерной подложке с трехмерным микроузором с помощью обычной тонкопленочной обработки, демонстрирует потенциал для разработки электродов TS для многих приложений, хотя дальнейшее улучшение оптической прозрачности необходимы. Было подтверждено, что использование подложки с трехмерным микроузором не только улучшило чувствительность к давлению, но и повысило механическую стабильность устройства при растяжении.
Хотя обычные материалы ITO были протестированы для использования в качестве растягиваемых электродов, циклическое растяжение вызывает сильное растрескивание тонких пленок ITO, а их механическая и электрическая стабильность очень плохи 42,43,44 . Электрод GIG на основе прозрачных, проводящих, но хрупких тонких пленок ITO, зажатых между ультратонкими металлическими слоями, сформированными на снимающей напряжения эластомерной подложке с трехмерным микроузором с помощью обычной тонкопленочной обработки, демонстрирует потенциал для разработки электродов TS для многих приложений, хотя дальнейшее улучшение оптической прозрачности необходимы. Было подтверждено, что использование подложки с трехмерным микроузором не только улучшило чувствительность к давлению, но и повысило механическую стабильность устройства при растяжении. Разработка прозрачного и растяжимого датчика давления прикосновения с помощью новых методов в электродных материалах, подложке и структурировании устройства может быть применена к изготовлению массива датчиков.
 Этот массив датчиков можно было закрепить на коже, и была успешно продемонстрирована возможность множественных функций ввода. Поскольку предлагаемый бимодальный датчик может принимать на вход различные типы информации в ограниченном пространстве, то как высокая функциональность, так и многофункциональность датчика будут выгодны для миниатюрного форм-фактора. Кроме того, датчик можно применить к носимой системе ввода, для которой возможен ввод 3D-информации, тогда как существующие сенсорные датчики распознают только двумерную (2D) информацию 13,45 . Однако, несмотря на результаты, показанные в нашей работе, электрическая и механическая стабильность двух электродов нуждается в дальнейшем улучшении за счет оптимизации конструкции материала и геометрической инженерии, чтобы минимизировать деформации, вызванные внешними нагрузками, связанными с движениями тела пользователей.
Этот массив датчиков можно было закрепить на коже, и была успешно продемонстрирована возможность множественных функций ввода. Поскольку предлагаемый бимодальный датчик может принимать на вход различные типы информации в ограниченном пространстве, то как высокая функциональность, так и многофункциональность датчика будут выгодны для миниатюрного форм-фактора. Кроме того, датчик можно применить к носимой системе ввода, для которой возможен ввод 3D-информации, тогда как существующие сенсорные датчики распознают только двумерную (2D) информацию 13,45 . Однако, несмотря на результаты, показанные в нашей работе, электрическая и механическая стабильность двух электродов нуждается в дальнейшем улучшении за счет оптимизации конструкции материала и геометрической инженерии, чтобы минимизировать деформации, вызванные внешними нагрузками, связанными с движениями тела пользователей. В заключение, мы разработали новый тип прозрачного и растягиваемого взаимного емкостного сенсорного датчика давления на основе прозрачного и растягиваемого составного пьезорезистивного верхнего электрода PEDOT:PSS/EMIM-TCB и многослойного нижнего электрода GIG.
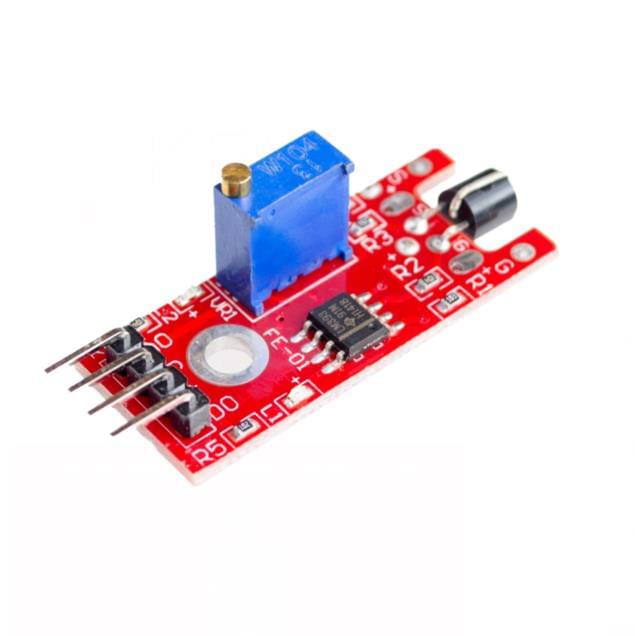 Прозрачный и растягивающийся пьезорезистивный электрод позволяет датчику обнаруживать и различать прикосновение и давление. Сочетание высокоэффективной способности 3D-микроузорной подложки поглощать напряжение с усиленной деформацией пьезорезистивного электрода вблизи пиков при вертикальном давлении обеспечивает высокую чувствительность к прикосновению и давлению, а также механическую стабильность. Это исследование демонстрирует, что предлагаемый датчик можно легко интегрировать в эргономичное носимое устройство в качестве устройства ввода, а его прозрачность и растяжимость позволят использовать его в качестве накладного датчика, устанавливаемого на тело человека. Более того, когда датчик интегрирован с другими компонентами, такими как блоки обработки сигналов и передачи данных, может быть продемонстрирован более высокий уровень интерактивности, что означает, что датчик TS имеет большой потенциал в качестве ключевого элемента будущих человеко-машинных интерфейсов. Кроме того, бимодальность датчика касания и давления может быть интегрирована в растягиваемую сенсорную панель для технологии растягиваемого дисплея.
Прозрачный и растягивающийся пьезорезистивный электрод позволяет датчику обнаруживать и различать прикосновение и давление. Сочетание высокоэффективной способности 3D-микроузорной подложки поглощать напряжение с усиленной деформацией пьезорезистивного электрода вблизи пиков при вертикальном давлении обеспечивает высокую чувствительность к прикосновению и давлению, а также механическую стабильность. Это исследование демонстрирует, что предлагаемый датчик можно легко интегрировать в эргономичное носимое устройство в качестве устройства ввода, а его прозрачность и растяжимость позволят использовать его в качестве накладного датчика, устанавливаемого на тело человека. Более того, когда датчик интегрирован с другими компонентами, такими как блоки обработки сигналов и передачи данных, может быть продемонстрирован более высокий уровень интерактивности, что означает, что датчик TS имеет большой потенциал в качестве ключевого элемента будущих человеко-машинных интерфейсов. Кроме того, бимодальность датчика касания и давления может быть интегрирована в растягиваемую сенсорную панель для технологии растягиваемого дисплея.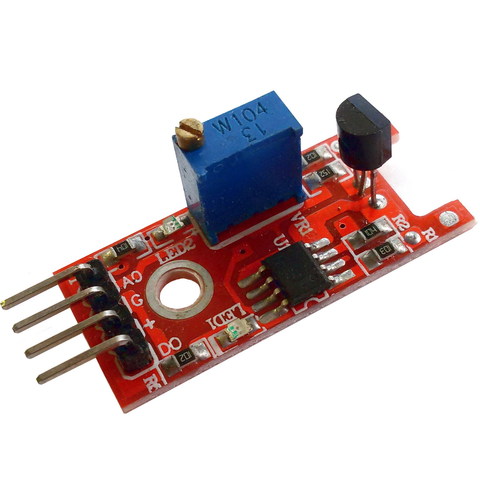 В этом отношении предлагаемый датчик имеет большой потенциал для будущей носимой электроники.
В этом отношении предлагаемый датчик имеет большой потенциал для будущей носимой электроники. Ссылки
-
Trung, T. Q. et al. Всенаправленно растягиваемый фотоприемник на основе органо-неорганических гетеропереходов. Приложение ACS Матер. Интерфейсы 9 , 35958–35967 (2017 г.).
КАС Google ученый
-
Wang, X. et al. Растяжимый прозрачный трибоэлектрический тактильный датчик с автономным питанием и металлизированными нановолокнами для носимой электроники. Доп. Матер. 30 , 1706738 (2018).
Google ученый
-
Кан М. и др. Трехмерный емкостный сенсорный датчик на основе графена для носимой электроники. ACS Nano 11 , 7950–7957 (2017).
КАС Google ученый
 «>
«> Рох Э., Хванг Б.-У., Ким Д., Ким Б.-Ю. и Ли, Н.-Э. Растяжимый, прозрачный, сверхчувствительный датчик деформации с возможностью исправления для интерфейсов человек-машина, состоящий из наногибрида углеродных нанотрубок и проводящих эластомеров. ACS Nano 9 , 6252–6261 (2015).
КАС Google ученый
-
Хван, Б.-У. и другие. Прозрачная растяжимая сенсорная платформа с автономным питанием и сверхчувствительным распознаванием действий человека. ACS Nano 9 , 8801–8810 (2015).
КАС Google ученый
-
Lee, J. et al. Растяжимый датчик деформации на основе тонкой пленки металлических наночастиц для обнаружения движения человека. Nanoscale 6 , 11932–11939 (2014).
КАС Google ученый
-
Ши, Дж. и др.
 Сети углеродных нанотрубок, армированные графеном, для носимых датчиков деформации. Доп. Функц. Матер. 26 , 2078–2084 (2016).
Сети углеродных нанотрубок, армированные графеном, для носимых датчиков деформации. Доп. Функц. Матер. 26 , 2078–2084 (2016). КАС Google ученый
-
Wang, C. et al. Карбонизированная шелковая ткань для сверхэластичных, высокочувствительных и переносных датчиков деформации. Доп. Матер. 28 , 6640–6648 (2016).
КАС Google ученый
-
Park, J. J., Hyun, W. J., Mun, S. C., Park, Y. T. & Park, O. O. Гибкие и удобные для носки графеновые датчики деформации с регулируемой чувствительностью для мониторинга движения человека. Приложение ACS Матер. Интерфейсы 7 , 6317–6324 (2015 г.).
КАС Google ученый
-
Ge, J. et al. Растяжимая искусственная кожа из электронной ткани с чувствительными к давлению, поперечному напряжению и изгибу свойствами.
 Доп. Матер. 28 , 722–728 (2016).
Доп. Матер. 28 , 722–728 (2016). КАС Google ученый
-
Ким К.К. и др. Высокочувствительный и растягиваемый многомерный датчик деформации с предварительно напряженными анизотропными перколяционными сетями из металлических нанопроволок. Нано Летт. 15 , 5240–5247 (2015).
КАС Google ученый
-
Чой, Д.Ю. и др. Растяжимый датчик деформации на основе ионной жидкости без гистерезиса для точного мониторинга движения человека. Приложение ACS Матер. Интерфейсы 9 , 1770–1780 (2017 г.).
КАС Google ученый
-
Ким, К.-К., Ли, Х.-Х., О, К.Х. и Сун, Дж.-Ю. Прозрачная ионная сенсорная панель с высокой эластичностью. Наука 12 , 682–687 (2016).
Google ученый
 «>
«> Jung, S. et al. Пористая чувствительная к давлению резина, созданная обратными мицеллами, для носимых интерфейсов человек-машина. Доп. Матер. 26 , 4825–4830 (2014).
КАС Google ученый
-
Ким, Н., Лим, Т., Сонг, К., Ян, С. и Ли, Дж. Растягивающаяся многоканальная электромиографическая матрица датчиков, охватывающая большую площадь для управления домашней электроникой с помощью различимых сигналов от нескольких мышц. Приложение ACS Матер. Интерфейсы 8 , 21070–21076 (2016 г.).
КАС Google ученый
-
Яо, С. и Чжу, Ю. Носимые многофункциональные датчики с использованием печатных растягиваемых проводников из серебряных нанопроволок. Наноразмеры 6 , 2345–2352 (2014).
КАС Google ученый
 «>
«> Парк, Дж. и др. Тактильно чувствительные к направлению и растягивающиеся электронные скины на основе взаимосвязанных микроструктур, вдохновленных человеческой кожей. ACS Nano 8 , 12020–12029 (2014).
КАС Google ученый
-
Трунг, Т. К., Рамасундарам, С., Хван, Б.-У. и Ли, Н.-Э. Полностью эластомерный прозрачный и эластичный датчик температуры для носимой электроники, прикрепляемой к телу. Доп. Матер. 28 , 502–509 (2016).
КАС Google ученый
-
Ро, Э., Ли, Х.-Б., Ким, Д.-И. и Ли, Н.-Э. Обрабатываемое раствором, всенаправленно растягивающееся и чувствительное к высокому давлению пьезорезистивное устройство. Доп. Матер. 29 , 1703004 (2017).
Google ученый
-
Парк, Х. и др. Растяжимый массив высокочувствительных датчиков давления, состоящий из полианилиновых нановолокон и покрытых золотом полидиметилсилоксановых микростолбиков.
 ACS Nano 9 , 9974–9985 (2015).
ACS Nano 9 , 9974–9985 (2015). КАС Google ученый
-
Амджади, М., Туран, М., Клементсон, С.П. и Ситти, М. Сверхчувствительные датчики деформации с высокой степенью растяжения на основе параллельных микротрещин. Приложение ACS Матер. Интерфейсы 8 , 5618–5626 (2016).
КАС Google ученый
-
Park, Y. et al. Проводящие узоры управляемых жидкостью графеновых нанопластинок, управляемые микротопографией, для растяжимой и конформной для кожи сенсорной матрицы. Доп. Матер. 29 , 1606453 (2017).
Google ученый
-
Ю, И. и др. Растяжимый датчик апекскардиограммы e-skin. Доп. Матер. 28 , 6359–6364 (2016).
КАС Google ученый
 «>
«> Сон, Д. и др. Многофункциональные носимые устройства для диагностики и терапии двигательных нарушений. Нац. нанотехнологии. 9 , 397–404 (2014).
КАС Google ученый
-
Сюй, Б. и др. Эпидермальная стимуляция и сенсорная платформа для сенсомоторного управления протезами, контроля нагрузки на нижнюю часть спины и электрической активации мышц. Доп. Матер. 28 , 4462–4471 (2016).
КАС Google ученый
-
Yamamoto, Y. et al. Печатное многофункциональное гибкое устройство со встроенным датчиком движения для мониторинга состояния здоровья. Науч. Доп. 2 , e1601473 (2016).
Google ученый
-
Чжао С. и Чжу Р. Электронная кожа с многофункциональными датчиками на основе термоощущения. Доп. Матер.
 29 , 1606151 (2017).
29 , 1606151 (2017). Google ученый
-
Tien, N. T. et al. Гибкая бимодальная матрица датчиков для одновременного измерения давления и температуры. Доп. Матер. 26 , 796–804 (2014).
Google ученый
-
Ким Д.-И. и другие. Массив датчиков, использующий многофункциональные полевые транзисторы со сверхвысокой чувствительностью и точностью для биомониторинга. Науч. Респ. 5 , 12705 (2015).
КАС Google ученый
-
Park, J., Kim, M., Lee, Y., Lee, H.S. & Ko, H. Микроструктурированная ферроэлектрическая кожа, вдохновленная кожей кончиков пальцев, различает статическое/динамическое давление и температурные раздражители. Науч. Доп. 1 , e1500661 (2015 г.).
Google ученый
 «>
«> Bae, G.Y. et al. Бимодальная электронная кожа, чувствительная к давлению/температуре, с распознаваемостью стимулов и линейной чувствительностью. Доп. Матер. 30 , 1803388 (2018).
Google ученый
-
Сонг, Ж.-К. и другие. Массив носимых сенсорных датчиков силы с использованием гибкого и прозрачного электрода. Доп. Функц. Матер. 27 , 1605286 (2017).
Google ученый
-
Huang, Y. et al. Гибкая матрица датчиков давления прикосновения с системой беспроводной передачи для роботизированной кожи. Rev.Sci. Инструм. 87 , 065007 (2016).
Google ученый
-
Ли, Х.-Б. и другие. Эластомерная подложка с узором Mogul для растягиваемой электроники. Доп. Матер. 28 , 3069–3077 (2016).
КАС Google ученый
 «>
«> Вен, Л., Саху, Б. Б. и Хан, Дж. Г. Разработка и использование нового трехмерного магнетронного источника для высокоскоростного осаждения тонких пленок ITO с высокой проводимостью при температуре около комнатной. Физ. хим. хим. физ. 20 , 4818–4830 (2018).
КАС Google ученый
-
Badre, C., Marquant, L., Alsayed, A.M. & Hough, L.A. Пленки из поли(3,4-этилендиокситиофена): поли(стиролсульфоната) с высокой проводимостью с использованием ионной жидкости тетрацианобората 1-этил-3-метилимидазолия. Доп. Функц. Матер. 22 , 2723–2727 (2012).
КАС Google ученый
-
Ки, С. и др. Управление молекулярным упорядочением в водных проводящих полимерах с помощью ионных жидкостей. Доп. Матер. 28 , 8625–8631 (2016).
КАС Google ученый
 «>
«> Тео, М.Ю. и др. Высокоэластичные и высокопроводящие композитные прозрачные электроды PEDOT:PSS/ионная жидкость для растяжимой электроники, обрабатываемой в растворе. Приложение ACS Матер. Интерфейсы 9 , 819–826 (2017).
КАС Google ученый
-
Xu, F. & Zhu, Y. Высокопроводящие и растяжимые серебряные проводники из нанопроволоки. Доп. Матер. 24 , 5117–5122 (2012).
КАС Google ученый
-
Ли Г.-Б., Сати С.Г., Ким Д.-Ю., Чон К.-У. & Nah, C. Сморщенные эластомеры для сильно растяжимых электродов с отличной усталостной прочностью. Полим. Тест. 53 , 329–337 (2016).
КАС Google ученый
-
Zang, Y., Zhang, F., Di, C.-a & Zhu, D. Достижения гибких датчиков давления для приложений искусственного интеллекта и здравоохранения.
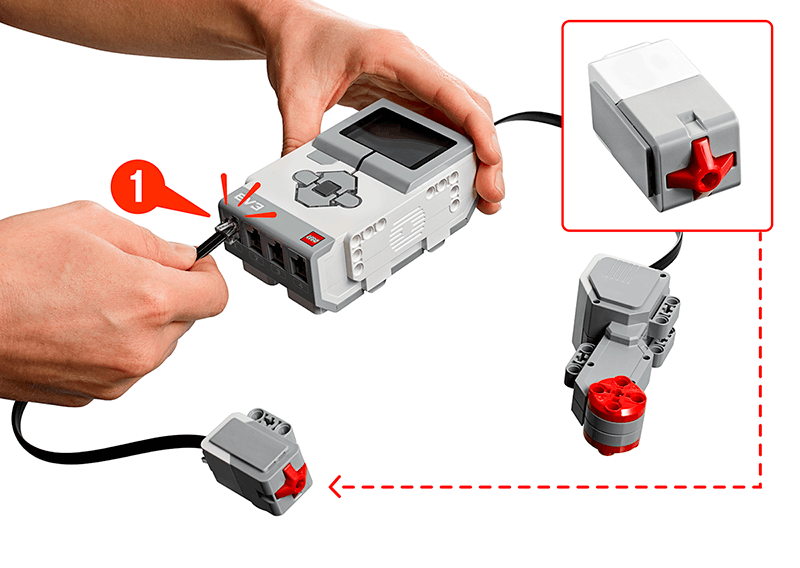 Матер. Гориз. 2 , 140–156 (2015).
Матер. Гориз. 2 , 140–156 (2015). КАС Google ученый
-
Ян, С., Су, Б., Битар, Г. и Лу, Н. Способность к растяжению серпентиновых тонких пленок из оксида индия-олова (ITO), поддерживаемых каптоновыми подложками. Междунар. Дж. Фракт. 190 , 99–110 (2014).
Google ученый
-
Гутруф, П. и др. Растяжимая электроника из прозрачного функционального оксида: микротектоника позволила создать электроды с высокой деформацией. NPG Азия Матер. 5 , e62 (2013).
КАС Google ученый
-
Лиен С.-Ю., Наутиал А. и Ли С.Дж. Оптоэлектронные свойства пленок оксида индия-олова, нанесенных на гибкую и прозрачную поли(диметилсилоксановую) подложку. япон. Дж. Заявл. физ. 52 , 115801 (2013).
Google ученый

-
{{supportModalInfo.
-
-
