Подключение ультразвукового датчика
Датчик HC-SR04 является ультразвуковым датчиком расстояния — дальномером. Принцип работы датчика очень похож на работу сенсоров летучих мышей или дельфинов. Датчик излучает пакет звуковых импульсов на ультразвуковой частоте. Отраженные от препятствий звуковые волны возвращаются обратно к датчику. Микрофон датчика улавливает первый пришедший импульс.
Поиск данных по Вашему запросу:
Схемы, справочники, даташиты:
Прайс-листы, цены:
Обсуждения, статьи, мануалы:
Дождитесь окончания поиска во всех базах.
По завершению появится ссылка для доступа к найденным материалам.
Содержание:
- Как подключить ультразвуковой дальномер HC-SR04 к Arduino
- Ультразвуковой датчик расстояния HC-SRF05 ардуино
- Ультразвуковой дальномер HC-SR04
- Подключение ультразвукового датчика к Ардуино
- Дальномер HC-SR04 подключение к Arduino
- Arduino:Примеры/Гайд по использованию ультразвукового датчика HC-SR04 с Arduino
- Как подключить ультразвуковой дальномер HC-SR04 к Arduino
ПОСМОТРИТЕ ВИДЕО ПО ТЕМЕ: Arduino проект — ультразвуковой парктроник — Ultrasonic parktronic with arduino
Как подключить ультразвуковой дальномер HC-SR04 к Arduino
Ультразвуковой датчик расстояния определяет расстояние до объекта, измеряя время отображения звуковой волны от объекта. Типичный ультразвуковой датчик расстояния состоит из двух мембран, одна из которых генерирует звук, а другая принимает отображенное эхо. Звуковой генератор первая мембрана создает маленький, с некоторым периодом ультразвуковой импульс и запускает таймер. Вторая мембрана регистрирует прибытие отображенного импульса и останавливает таймер.
От времени таймера по скорости звука можно вычислить пройденное расстояние звуковой волны. Расстояние объекта приблизительно равно половине пройденного пути звуковой волны. Ультразвуковой датчик расстояния модуль HC-SR04 — это датчик, который использует акустическое излучение для определения расстояния до объекта._NCS1zZOPty.png) Этот бесконтактный датчик обеспечивает высокую точность и стабильность измерений. На показания датчика практически не влияют солнечное излучение и электромагнитные шумы.
Этот бесконтактный датчик обеспечивает высокую точность и стабильность измерений. На показания датчика практически не влияют солнечное излучение и электромагнитные шумы.
Видеоигры Кино ТВ Вики. Исследуйте вики Вики Сообщества Создать вики. Войти Нет учётной записи? Создать вики. Содержание [ развернуть ]. Категории :. Отмена Сохранить.
Ультразвуковой датчик расстояния HC-SRF05 ардуино
Робототехника — это прикладная наука, занимающаяся разработкой автоматизированных технических систем и являющаяся важнейшей технической основой интенсификации производства. Робототехника становится необходимостью в промышленной сфере, сфере медицины, безопасности, науки. Например, роботы — пожарные тушат пожары в труднодоступных для человека местах. Роботы — медсёстры в экспериментальных условиях выполняют рутинную работу за человека. Ещё более разнообразен и роботизирован процесс создания каких-либо продуктов на заводах.
Ультразвуковой датчик HC-SR04 ArduinoHC-SR04; Провода.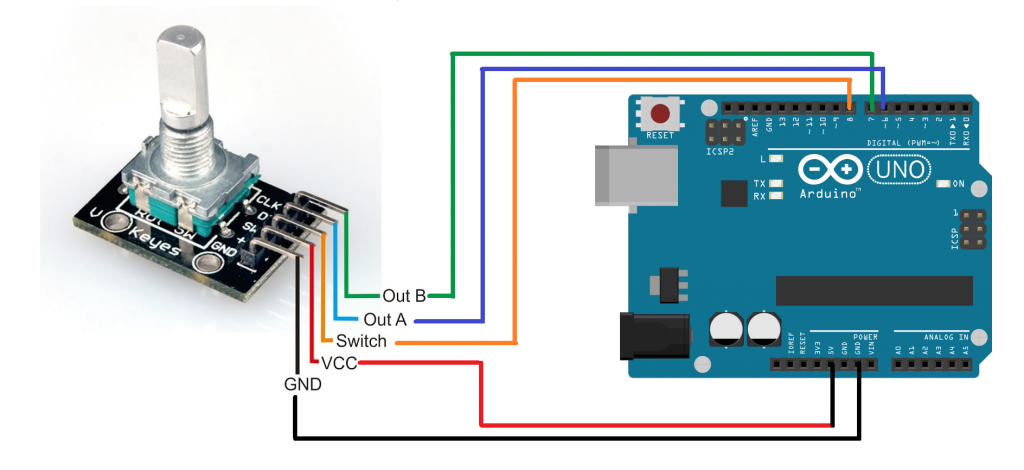 x4 wire; Есть схемы с внешним источником питания, но можно взять.
x4 wire; Есть схемы с внешним источником питания, но можно взять.
Ультразвуковой дальномер HC-SR04
Новые статьи. Принцип работы, подключение, примеры. Модуль Bluetooth HC Принцип работы, подключение. Чтение и запись данных. Обрабатываем команды от пульта. Принцип работы, подключение, пример. Принцип работы, пример работы. Крутим потенциометр, меняем положение.
Подключение ультразвукового датчика к Ардуино
Ультразвуковые датчики расстояния Ардуино очень востребованы в робототехнических проектах из-за своей относительной простоты, достаточной точности и доступности. Они могут быть использованы как приборы, помогающие объезжать препятствия, получать размеры предметов, моделировать карту помещения и сигнализировать о приближении или удалении объектов. Одним из распространенных вариантов такого устройства является датчик расстояния, в конструкцию которого входит ультразвуковой дальномер HC SR В этой статье мы познакомимся с принципом действия датчика расстояния, рассмотрим несколько вариантов подключения к платам Arduino, схему взаимодействия и примеры скетчей.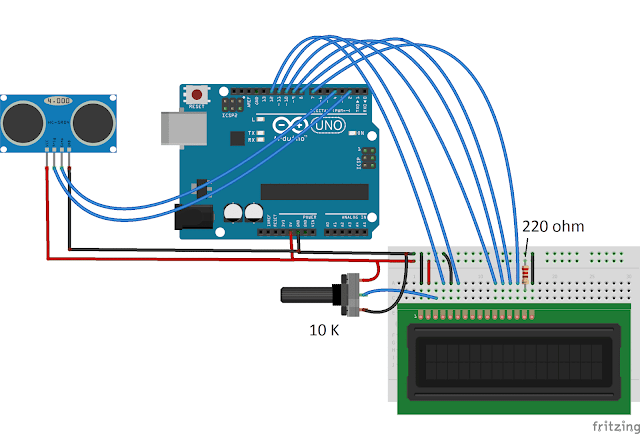
Ультразвуковой дальномер является датчиком пространства, позволяет измерять расстояние до объекта в диапазоне от 2 до см. База знаний.
Дальномер HC-SR04 подключение к Arduino
Ультразвуковой датчик расстояния определяет расстояние до объекта, измеряя время отображения звуковой волны от объекта. Типичный ультразвуковой датчик расстояния состоит из двух мембран, одна из которых генерирует звук, а другая принимает отображенное эхо. Звуковой генератор первая мембрана создает маленький, с некоторым периодом ультразвуковой импульс и запускает таймер. Вторая мембрана регистрирует прибытие отображенного импульса и останавливает таймер. От времени таймера по скорости звука можно вычислить пройденное расстояние звуковой волны.
Arduino:Примеры/Гайд по использованию ультразвукового датчика HC-SR04 с Arduino
Одним из недостатков данного устройства является отсутствие температурной компенсации, теоретически это свойство можно использовать для измерения температуры [2]. Существует подобный УЗ датчик US в котором уже предусмотрена подобная компенсация. Датчик был приобретен на Али за 2,5 доллара. Конструктивно датчик US напоминает HC-SR04, единственным заметным отличием является второй контакт заземления и наличие перемычки для переключения режимов работы. Датчик имеет габариты 44 х 26 х 23 мм и массу 8,4 г. Диаметр УЗ излучателя и приемника составляет 16 мм.
Существует подобный УЗ датчик US в котором уже предусмотрена подобная компенсация. Датчик был приобретен на Али за 2,5 доллара. Конструктивно датчик US напоминает HC-SR04, единственным заметным отличием является второй контакт заземления и наличие перемычки для переключения режимов работы. Датчик имеет габариты 44 х 26 х 23 мм и массу 8,4 г. Диаметр УЗ излучателя и приемника составляет 16 мм.
ультразвуковым дальномером HC-SR04 на базе . расстояния измерения датчика, это 2 см и см. При h = 2 ПОДКЛЮЧЕНИЕ УЛЬТРАЗВУКОВОГО .
Как подключить ультразвуковой дальномер HC-SR04 к Arduino
Объясняется принцип его действия, технические характеристики, приведен пример его подключения к Arduino и программы для прошивки микроконтроллера. Ультразвуковой датчик расстояния — модуль HC-SR04 использует акустическое излучение для определения расстояния до объекта. Этот бесконтактный датчик обеспечивает высокую точность и стабильность измерений. Диапазон измерений составляет: от 2 см до см.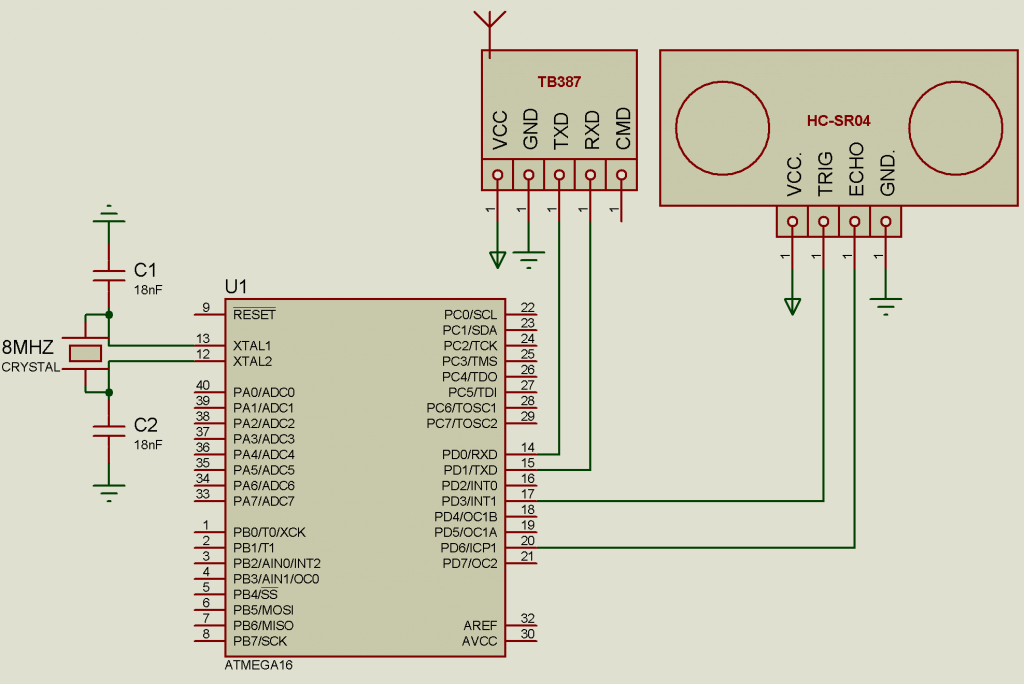
Войдите , пожалуйста. Хабр Geektimes Тостер Мой круг Фрилансим. Войти Регистрация. Также расскажу как написать программу для управления подключенных модулей. Основываясь на моем примере вы сможете подключить ваши собственные модули, управлять ими при помощи программы.
Расскажем, как подключить ультразвуковой дальномер HC-SR Разберем скетч для датчика, который может прекрасно служить для робота при определении расстояния до объектов или обнаружения препятствия.
В этой статье мы подключим ультразвуковой дальномер-эхолокатор HC-SR04 к Arduino и научимся с помощью него определять расстояние до цели. Действие ультразвукового дальномера HC-SR04 основано на принципе эхолокации. Он излучает звуковые импульсы в пространство и принимает отражённый от препятствия сигнал. По времени распространения звуковой волны к препятствию и обратно определяется расстояние до объекта. Запуск звуковой волны начинается с подачи положительного импульса длительностью не менее 10 микросекунд на ножку TRIG дальномера.
Эта статья — об ультразвуковом датчике HC-SR Она объясняет, как он работает, рассказывает о некоторых его функциях, а также содержит скетч Arduino , который вы можете использовать в своих проектах. Ультразвуковой датчик HC-SR04 использует сонар, с помощью которого определяет расстояние до объекта, как это делают летучие мыши.
Подключение ультразвукового датчика датчика HS-SR04 к Arduino
Ну что, продолжая изучение Ардуино и как следствие альтернатив на счет подключения возможных датчиков, добрался я и до ультразвукового датчика HS-SR04. В целом его использование в купе с Ардуинкой начиная с подключения и заканчивая пробными экспериментами прошло без проблем, поэтому этот датчик однозначно можно отнести в разряд беспроблемных!
Итак, все же для истории и для заметки я чиркну пару строк на этот счет.
Характеристика датчика HS-SR04
Что же пару слов о не особо интересном, но явно полезном, если вдруг появятся проблемы с датчиком.
Напряжение питания: 5 В
Потребление в режиме тишины: 2 мА
Потребление при работе: 15 мА
Диапазон расстояний: 2–400 см
Эффективный угол наблюдения: 15°
Рабочий угол наблюдения: 30°
Если наглядно, то датчик работает примерно так.
Есть излучатель и есть приемник. И тут собственно происходит обычное анализирование между временем когда сигнал был отправлен и когда получен. В итоге по этому времени и считается расстояние между датчиком и препятствием. И здесь естественно сигнал исходящий должен быть импульсным с определенными перерывами между импульсами, ведь только в этом случае мы сможем узнать о конкретном времени передачи сигнала, то есть появиться возможность разделить «порционно» не только передачу, что не особо важно, а именно прием. И здесь уже можно понять, что определенная изначальная передача сигнала была привязана именно к данному конечному приему этого же сигнала.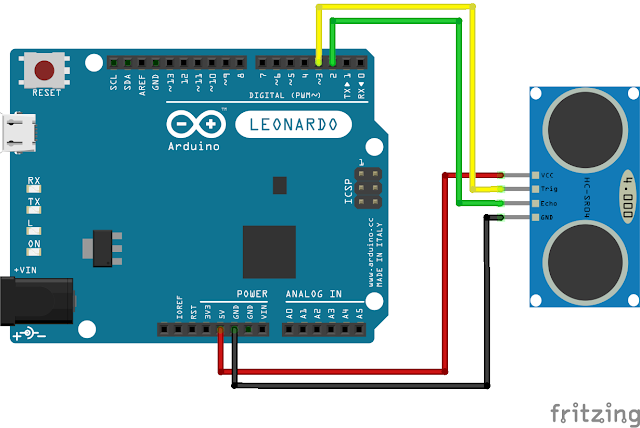 Если же было постоянное излучение, то расстояние можно было определять лишь по уровню приходящего сигнала, а не по времени, что явно менее выигрышное в алгоритме определения расстояния.
Если же было постоянное излучение, то расстояние можно было определять лишь по уровню приходящего сигнала, а не по времени, что явно менее выигрышное в алгоритме определения расстояния.
Теперь же к схеме подключения, хотя в случае с Ардуино это все условности, ведь схема может весьма гибко и быстро меняться, исходя из программы.
Электрическая схема подключения HS-SR04 к Ардуино
Если речь пошла о подключении, то сразу о выводах на датчике.
Контакт питания положительного типа – +5В;
Trig (Т) – выход сигнала входа;
Echo (R) – вывод сигнала выхода;
GND – вывод «Земля».
Собственно из 4 пинов два используются для питания, и два для обмена данными. Как и было сказано подключение во 2 и 4 вывод весьма условны, так как их можно переписать в скетче, о котором и поведаю далее.
Скетч для работы с датчиком HS-SR04
Сам скетч предполагает срабатывание светодиода, то есть что он загорится, когда до препятствия останется указанная дистанция. Собственно пояснения можно найти в самом скетче, в общем открываем его и смотрим.
Собственно пояснения можно найти в самом скетче, в общем открываем его и смотрим.
Смотреть скетч для HS-SR04
* — в скетче 0,034 это как раз расстояние которое проходит звук, но не в секундах, а в мкс и там же если посмотрите оно делится пополам, так как звуку надо еще вернуться обратно.
Ну и когда расстояние становится вновь больше указанного, то само собой светодиод гаснет. По мне так все просто. Для датчика существуют библиотеки, которые позволяют ему работать более корректно в случае с нежелательным отраженным сигналом (эхо). Меня на настоящий момент это не особо интересовало, поэтому библиотеки я себе не брал. Все работает без них.
Ультразвуковые датчики Arduino— MaxBotix
Многие наши клиенты используют Arduino и другие микроконтроллеры при тестировании или разработке своих идей.
Если вы никогда раньше не пробовали использовать наши датчики, это может показаться ошеломляющим. Это руководство и другие, перечисленные ниже, помогут вам начать работу с нашими простыми в использовании ультразвуковыми дальномерами.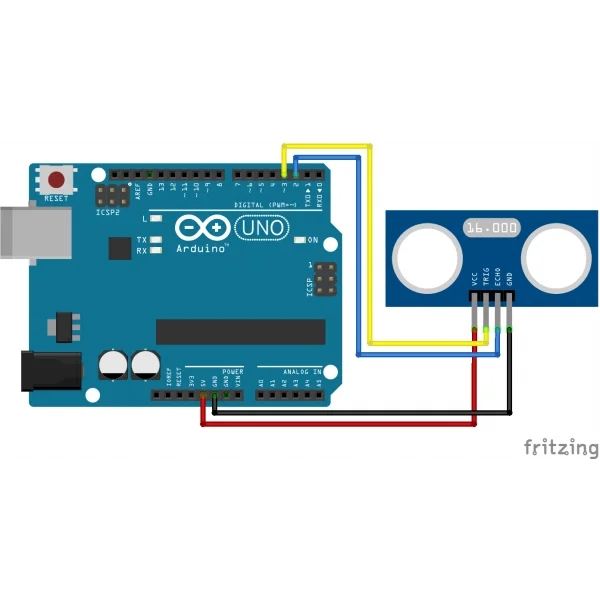
Если вам нужна помощь в поиске подходящего датчика, не стесняйтесь нажать кнопку «Получить помощь в поиске подходящего датчика для вашего проекта Arduino» и ответьте на 10 простых вопросов, чтобы мы могли помочь вам начать работу.
Начало работы с Arduino и ультразвуковыми датчиками MaxBotix
Эти ресурсы были созданы, чтобы помочь вам начать работу с Arduino и нашими датчиками.
Мы охватываем:
Использование I2C-MaxSonar с Arduino
Как использовать ультразвуковой датчик с Arduino
Ультразвуковой датчик MB1240 с Arduino Tutorial
MB7389 Ультразвуковой датчик с Arduino Tutorial
Использование I2C-MaxSonar с Arduino
Простой и понятный способ настроить и запустить I2C-MaxSonar на Arduino.
Предоставлена обучающая информация, связанная с этой конкретной реализацией I2C.
Как использовать ультразвуковой датчик с Arduino
Ультразвуковые датчики MaxBotix, взаимодействующие с платформой Arduino
, позволяют пользователям легко реализовать возможности измерения дальности независимо от необходимости.
Учебное пособие по ультразвуковому датчику MB1240 с Arduino
В этом учебном пособии вы узнаете, как подключить ультразвуковой датчик MB1240 к Arduino,
, с примерами кода для запуска вашего приложения.
Учебное пособие по ультразвуковому датчику MB7389 с Arduino
В этом учебном пособии вы узнаете, как подключить атмосферостойкий ультразвуковой датчик MB7389
к Arduino с примерами кода.
Как это работает
1. Обсудите ваше приложение с нашей службой поддержки
2. Выберите датчик
3. Легко интегрируйте датчик в ваше приложение
Соавторы
используются в приложении конечного пользователя. Вы можете либо использовать конечный продукт наших сотрудников, либо работать с нами, чтобы найти правильный датчик для вашего решения.
Беспроводной IoT-датчик дальнего действия конструктор и производитель
Radio Bridge Inc. предлагает мост LoRaWAN общего назначения с датчиками MaxBotix для использования во многих приложениях.
предлагает мост LoRaWAN общего назначения с датчиками MaxBotix для использования во многих приложениях.
Резюме:
- Обслуживаемые отрасли: розничная торговля, промышленность, нефть и газ, вычеты, коммунальные услуги, безопасность
- Обычно используется для мониторинга резервуаров
- Беспроводное подключение по протоколу LoRaWAN
- Беспроводное проникновение через такие конструкции, как стены и полы
Ультразвуковой датчик расстояния для измерения уровня в резервуарах
Компания LX Group разработала ультразвуковой датчик расстояния для измерения уровня в резервуарах
Обзор:
- Используется в зернохранилищах, резервуарах для воды и плотинах
- Удаленный мониторинг уровня воды в резервуарах
- Готовый к работе продукт с функцией plug-and-play имеет надежную конструкцию для работы в неблагоприятных условиях.
Датчик расстояния LoRaWAN IoT
Шведская компания ELSYS использует датчик из нашей линейки WR в своем датчике расстояния IoT.
Реальные приложения включают:
-
Измерение уровня подземных вод
-
Измерение уровня отходов в контейнерах
-
Измерение высоты снега
О НАС
MaxBotix Inc. разрабатывает и производит ультразвуковые датчики для измерения уровня, приближения и расстояния.
Связаться с US
Справка по выбору датчика
Получить цитату
Техническая поддержка
Ресурсы
Статьи
Учебные пособия
Тематические исследования
Условия
Условия
Политика конфиденциальности
Ультразвуковой дальномерна Arduino — Портал производителя
Акустика и времяпролет
Быстрый просмотр
Ультразвуковой датчик расстояния HC-SR04
6,00 $
Количество:
В корзину
Типичный здоровый человек способен различать частоты в диапазоне от 20 Гц до 20 кГц.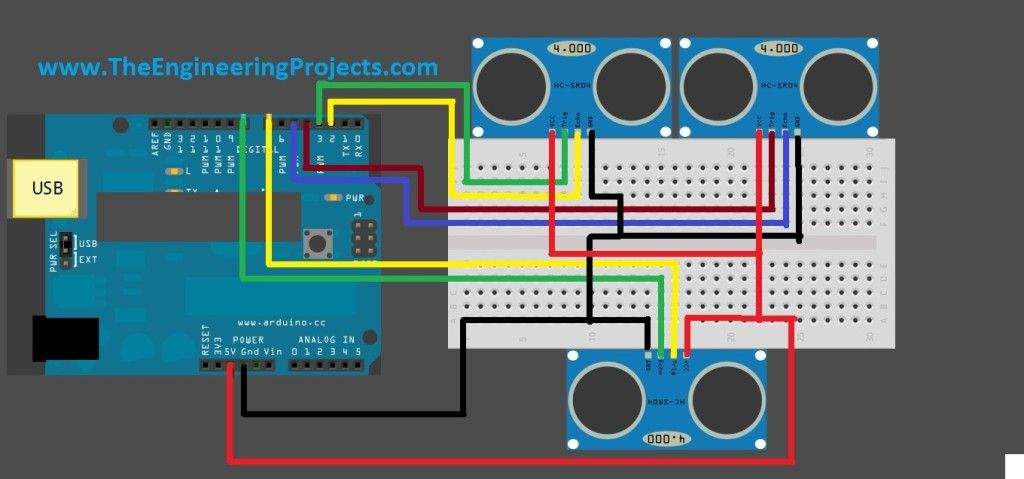 Частоты выше этого диапазона, называемые ультразвуком, не слышны человеку из-за физических и нервных ограничений, установленных нашей слуховой системой. Звук, как и свет, является прекрасным научным инструментом из-за его предсказуемого поведения и манипулятивных свойств. Основное применение ультразвука в гражданской и биомедицинской инженерии. Ультразвук замечательно настраивается и часто используется для неразрушающего контроля и хирургических операций. Здесь приложение представляет собой расчет времени полета, и метод прост. Ультразвук можно рассматривать как возмущение, распространяющееся через среду (воздух). Таким образом, мы можем определить линейную зависимость между расстоянием, скоростью и временем как:0003
Частоты выше этого диапазона, называемые ультразвуком, не слышны человеку из-за физических и нервных ограничений, установленных нашей слуховой системой. Звук, как и свет, является прекрасным научным инструментом из-за его предсказуемого поведения и манипулятивных свойств. Основное применение ультразвука в гражданской и биомедицинской инженерии. Ультразвук замечательно настраивается и часто используется для неразрушающего контроля и хирургических операций. Здесь приложение представляет собой расчет времени полета, и метод прост. Ультразвук можно рассматривать как возмущение, распространяющееся через среду (воздух). Таким образом, мы можем определить линейную зависимость между расстоянием, скоростью и временем как:0003
, где c — скорость звука, d — расстояние, а t — время. Хитрость расчета ультразвукового расстояния заключается в настройке геометрии и временной задержке между переданным и принятым импульсами:
Здесь мы определяем Δ t как время, необходимое для того, чтобы серия переданных импульсов испустилась, упала на объект на некотором расстоянии и вернулась обратно к месту передачи.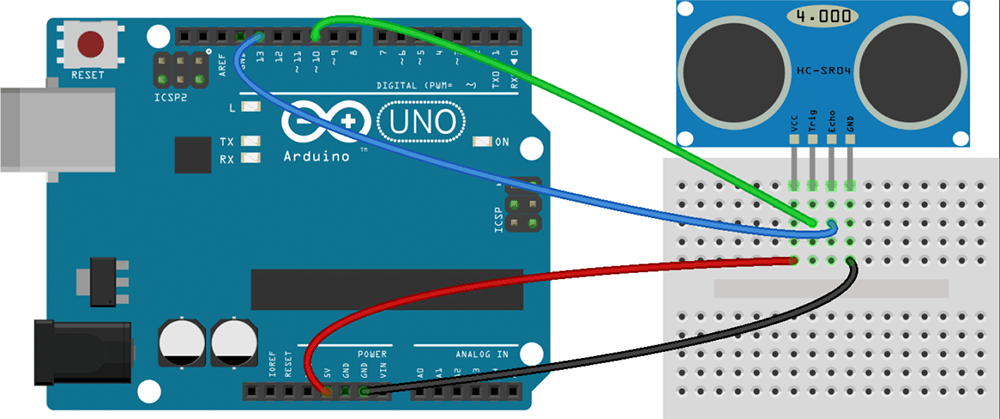 Это основа для ультразвукового и любого линейного расчета времени пролета.
Это основа для ультразвукового и любого линейного расчета времени пролета.
Датчик HC-SR04 и Arduino
Фокус теперь смещается с физики на приборы. Ультразвуковой датчик расстояния HC-SR04 (и его многочисленные модификации) часто используется производителями электроники благодаря своей простой и интуитивно понятной конструкции. Датчик посылает серию импульсов частотой 40 кГц и прослушивает обратный сигнал. Arduino можно запрограммировать на вычисление разницы во времени между передачей и приемом импульса для приблизительного определения расстояния до объекта. Типичная схема подключения для HC-SR04 показана ниже, с одной оговоркой, что SIG на схеме ниже будет Trig и Echo на HC-SR04. Trig должен быть подключен к цифровому контакту 2 на Arduino Uno, а Echo должен быть подключен к контакту 3.
Схема подключения ультразвукового датчика. Обратите внимание, что показанный здесь выход SIG должен быть Trig и Echo, подключенным к контактам 2 и 3 соответственно.
Ниже приведена базовая реализация ультразвукового расчета времени пролета с использованием Arduino IDE.
В этот момент ваша плата Arduino должна выдавать разумные оценки объекта на некотором расстоянии от датчика. Если есть какие-либо проблемы, это, вероятно, ошибка программирования или проблема с проводкой. В противном случае, если ваши значения разумны и вы удовлетворены своими результатами, вы закончили с этим руководством. Однако, если вы видите ошибку в своих измерениях, продолжайте читать, пока я обсуждаю калибровку и способы исправления HC-SR04 для дрейфа или заводских неточностей.
Калибровка HC-SR04 для более точных показаний
Видео, показывающее, как после продажи откалибровать ультразвуковой датчик расстояния HC-SR04.
Датчик, использованный в моих экспериментах, выдавал постоянную ошибку при измерении на нескольких расстояниях. Ошибка была небольшой, но достаточно заметной и последовательной, поэтому я решил исследовать ее калибровку. Я использовал сетки инженерной бумаги и движущуюся цель, чтобы записать несколько расчетов времени полета (TOF), чтобы определить, насколько точно датчик приближается к местоположению цели. Я записал несколько измерений TOF, используя функцию последовательного чтения Python. Это сделало построение графика и понимание поведения убедительным. Необработанные данные эксперимента с движущейся мишенью показаны ниже:
Я использовал сетки инженерной бумаги и движущуюся цель, чтобы записать несколько расчетов времени полета (TOF), чтобы определить, насколько точно датчик приближается к местоположению цели. Я записал несколько измерений TOF, используя функцию последовательного чтения Python. Это сделало построение графика и понимание поведения убедительным. Необработанные данные эксперимента с движущейся мишенью показаны ниже:
График, показывающий эксперимент с необработанной движущейся мишенью. Каждый горизонтальный тренд означает перемещение на 1 дюйм от датчика.
Из графика выше не ясно, однако после осмотра и пересчета в расстояние видно, что датчик имеет некоторый дрейф к истинным значениям. Следовательно, я решил использовать инструмент полифита Python (в numpy) и попытаться найти тенденцию в неточных данных. Основная идея реализации полиномиальной регрессии заключается в том, что датчики часто дрейфуют с течением времени и при определенных обстоятельствах (изменения температуры/влажности, нагрузка на компоненты в результате использования с течением времени, физическая нагрузка и т.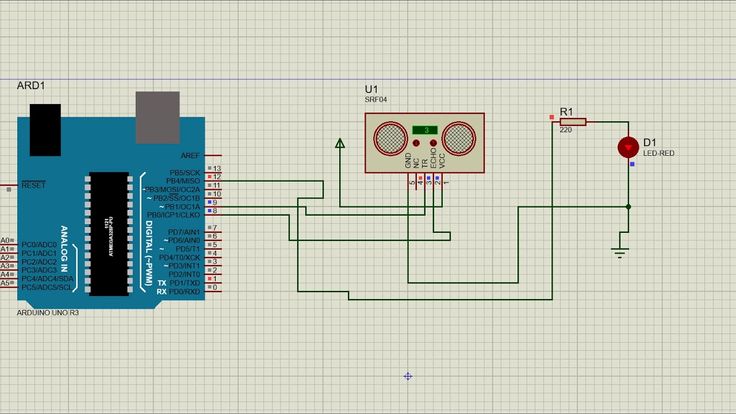 д.), поэтому нередко датчики нуждаются в калибровке от время от времени. Я использовал регрессию первого порядка для моделирования линейного дрейфа и сопоставил данные, собранные из показаний движущейся цели, с реальными измеренными расстояниями и нашел следующие константы:
д.), поэтому нередко датчики нуждаются в калибровке от время от времени. Я использовал регрессию первого порядка для моделирования линейного дрейфа и сопоставил данные, собранные из показаний движущейся цели, с реальными измеренными расстояниями и нашел следующие константы:
d в приведенном выше уравнении означает расстояние, рассчитанное с использованием традиционной физической модели TOF. После нахождения этих констант для линейной модели и использования линейной модели для корректировки исходных расчетных значений ошибка была минимизирована, и были получены следующие результаты:
Улучшение по сравнению с первоначальными оценками огромно. При замене исходного кода Arduino ошибки полностью сводятся к минимуму. Теперь значения, напечатанные на последовательном мониторе Arduino, абсолютно точны и находятся в разумных пределах погрешности. Датчик HC-SR04 надежен и полностью функционален (я тестировал свой датчик на расстоянии до 7 футов), а погрешность составила менее 1% (свыше 1 фута) и менее 10% (менее 3 дюймов).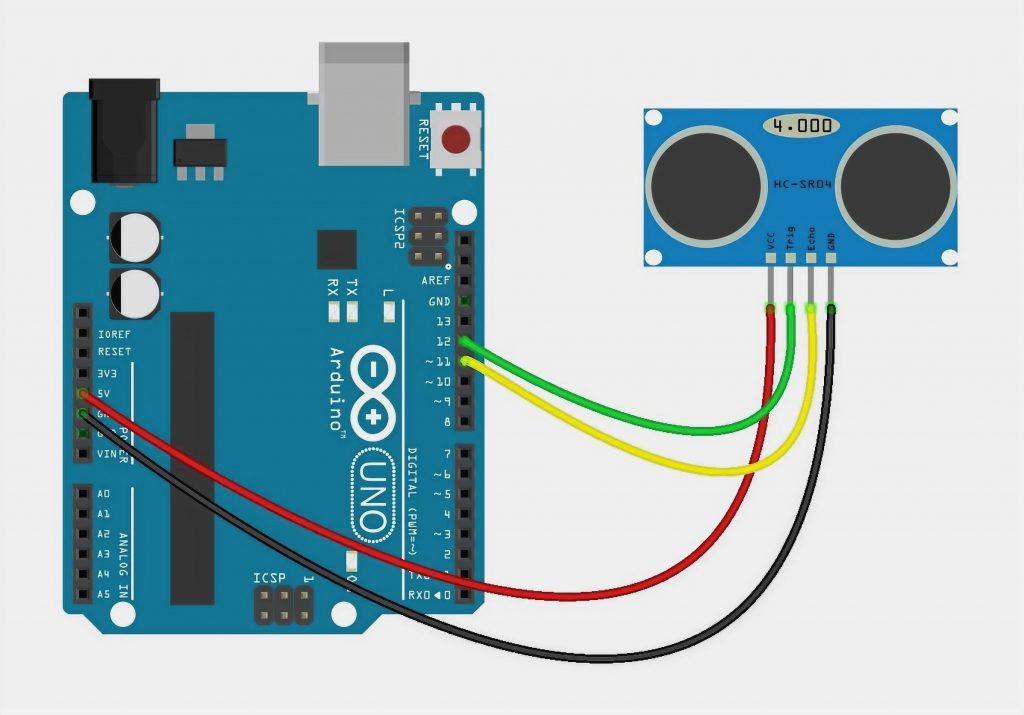 Это еще раз доказывает, что наука поддерживается природой, но приборы должны поддерживаться людьми.
Это еще раз доказывает, что наука поддерживается природой, но приборы должны поддерживаться людьми.
Окончательные соответствующие коды
# Построение графика результатов калибровки HC-SR04 # # импортировать matplotlib.pyplot как plt импорт CSV, математика импортировать numpy как np dat_vec = [1.05,1.79,2.73,3.57,4.4,5.48,6.27,10.7,20.5,30.8,41,51.2,61.45,82.1] # это значения, которые выдает типичный алгоритм time-of-flight без исправления x_poly = [1,2,3,4,5,6,7,12,24,36,48,60,72,96] # это ожидаемые значения (измерено с точностью) order_num = 1 # порядок полиномиальной подгонки [linear = 1] plt.figure(figsize=(12,9)) poly_fit = np.polyfit(dat_vec,x_poly,order_num) # подгоняем данные к измеренным значениям print(poly_fit) # распечатайте их, чтобы снова подключить к коду Arduino # Сюжет, по желанию p = np.poly1d (poly_fit) plt.plot(dat_vec,x_poly,linewidth=4,label='Exact',color='#3a2a29') plt.plot(dat_vec,p(dat_vec),linestyle='--',color='#b39a7c',label='Исправлено',linewidth=4) plt.
