Как работают современные сейсмодатчики. Какие технологии используются в сейсмометрах Guralp. Как настроить систему мониторинга сейсмической активности с помощью ПО SCREAM и Earthworm. Какие основные этапы включает установка и конфигурация сейсмической станции.
Принцип действия сейсмодатчиков Guralp CMG-6TD
Сейсмодатчики Guralp CMG-6TD представляют собой высокоточные приборы для регистрации сейсмических колебаний. В их основе лежит молекулярно-электронная технология, позволяющая достичь высокой чувствительности.
Как устроен сейсмодатчик Guralp CMG-6TD?
- Набор датчиков: гироскопы, масса, термодатчик
- Аналого-цифровой преобразователь (АЦП)
- Контроллер с Flash-памятью
- Герметичный круглый корпус
Датчик регистрирует движения по трем осям:
- Вертикальная ось (Z)
- Горизонтальные оси (E-W и N-S)
При установке сейсмометр необходимо точно выровнять по компасу и отцентрировать. Это обеспечивает корректность получаемых данных.

Способы съема данных с сейсмодатчиков Guralp
Guralp CMG-6TD предоставляет два основных способа получения данных:
- В режиме реального времени через:
- COM-порт
- Встроенный TCP-сервер
- Отложенный доступ к накопленным данным:
- Скачивание с внутренней Flash-памяти через FireWire
Какой метод выбрать для съема данных с сейсмодатчика Guralp?
Для оперативного мониторинга оптимально использовать режим реального времени через TCP-сервер. Это позволяет удаленно получать данные, не требуя физического доступа к прибору.
Настройка сетевого подключения Guralp CMG-6TD
Для настройки сетевого подключения сейсмодатчика используется встроенный TCP-serial сервер Lantronix. Доступ к его настройкам осуществляется через веб-интерфейс или Telnet.
Как настроить сетевое подключение Guralp CMG-6TD?
- По умолчанию при включении прибор пытается получить IP-адрес по DHCP
- Рекомендуется настроить статический IP-адрес для стабильной работы
- Важно правильно сконфигурировать параметры последовательного соединения (BaudRate)
- В меню Connection выбрать протокол TCP
- Настроить порты: локальный — 10001, удаленный — 1567
Внимание: Для корректной работы веб-интерфейса настройки необходимо использовать Internet Explorer. Другие браузеры могут некорректно отображать страницы конфигурации.

Программное обеспечение SCREAM для работы с сейсмодатчиками Guralp
SCREAM — это универсальная программа от производителя Guralp для работы со всей линейкой сейсмологического оборудования.
Какие возможности предоставляет ПО SCREAM?
- Контроль работы сейсмометров
- Прием данных в реальном времени
- Сохранение полученной информации
- Ретрансляция данных другим системам
SCREAM доступна для Windows и Linux. Для работы 32-битной версии на 64-битных системах Linux необходимо установить пакет ia32libs.
Как подключить сейсмодатчик Guralp к SCREAM?
- Запустить SCREAM
- Перейти в Network → Configure
- На вкладке My Client добавить TCP Server с IP-адресом устройства и портом 10001
- Нажать Connect (Ctrl+C)
При успешном подключении устройство появится в левой панели под Network. В правой части будет отображен список доступных каналов данных.
Система Earthworm для обработки сейсмических данных
Earthworm — открытая система для сбора, анализа и представления сейсмических данных. Она широко используется научными институтами по всему миру.

Какие основные компоненты входят в состав Earthworm?
- startstop — ядро системы, управляющее запуском других компонентов
- scream2ew — модуль приема данных от SCREAM
- wave_serverV — хранение данных и обслуживание клиентских запросов
- heli_ewII — визуализация данных в виде сейсмограмм
Earthworm имеет модульную архитектуру. Компоненты обмениваются данными через разделяемую память (Shared Memory).
Установка и настройка Earthworm
Как установить систему Earthworm?
- Создать пользователя earthworm
- Распаковать архив с бинарной сборкой
- Создать необходимые директории (run, datafiles, gifs, params, scripts)
- Настроить переменные окружения в файле ew_linux.bash
- Создать символическую ссылку на файл параметров earthworm.d
Для стабильной работы рекомендуется использовать 32-битную версию Earthworm, даже на 64-битных системах.
Какие основные конфигурационные файлы требуют настройки?
- startstop_unix.d — настройка модулей и очередей сообщений
- scream2ew.d — параметры получения данных от SCREAM
- wave_serverV.d — настройка хранения и обработки данных
- heli_ewII.d — конфигурация визуализации сейсмограмм
Важно корректно указать идентификаторы модулей и названия каналов данных во всех конфигурационных файлах.
Запуск и мониторинг работы системы
Как организовать запуск компонентов Earthworm?
Рекомендуется создать отдельные скрипты запуска для каждого компонента:
- startstop.sh
- scream2ew.sh
- wave_serverV.sh
- heli_ewII.sh
Скрипты должны обеспечивать перезапуск компонентов в случае сбоев. Можно использовать циклический запуск с проверкой наличия стоп-файла.
Как контролировать работу системы мониторинга?
- Проверять наличие лог-файлов компонентов
- Отслеживать появление новых файлов данных (танков) в директории datafiles
- Контролировать генерацию изображений сейсмограмм в директории gifs
- Мониторить загрузку процессора и памяти
При корректной настройке система должна стабильно работать, регулярно получая и обрабатывая данные с сейсмодатчиков.
обзор, установка, настройка / Хабр
Приветствую, уважаемые Хабравчане! Многие из нас живут в сейсмически нестабильных районах, и, полагаю, землетрясений не любит никто. Как технарю, да и вообще, данная тематика мне была всегда интересна: как и где землетрясения зарождаются, как определяют эпицентр и магнитуду, как производится мониторинг и т. д. И вот так получилось, что мне понадобилось сделать некую пилотную систему для мониторинга в реальном времени показателей нескольких сейсмодатчиков, расположенных достаточно далеко друг от друга и от центра, где эти данные и сохраняются, и обрабатываются. При возможности, хотелось также сделать WWW страничку, где можно было бы в реальном времени посмотреть показатели с датчиков. Задача оказалась достаточно нетривиальной, и после того, как был достигнут определённый успех в данном направлении, я решил, что было бы неплохо сделать обзорную статью/мануал по данному вопросу, что в дальнейшем может сильно облегчить кому-то жизнь, особенно учитывая, что информации в Рунете по данному вопросу я не нашёл вообще.
Итак, эта статья — как настроить сейсмографы фирмы Guralp, снять с них данные и отрисовать в реальном режиме времени на WWW страничке показатели сейсмодатчиков. Также описывается, какой софт используется, где его взять и как настроить.
Сейсмометры:
В моем распоряжении находилось 2 сейсмометра немецкого производства — Guralp CMG-6TD. Данные девайсы представляют собой связку набора датчиков (гироскопов, массы и температуры), ADC, контроллера с определённым объёмом Flash памяти и упакованных в герметичный круглый корпус. С каждого датчика можно снимать данные как в реальном времени (через COM-порт или внутренний TCP сервер, который данный COM-порт делает удалённо доступным), так и просто зарыть его где-то поглубже, а потом скинуть данные на диск через FireWire со внутренней флэшки.
А это один из датчиков, установленный на специальном постаменте в подвале сейсмического инстутута в регионе, недалеко от Душанбе
Конечно, аппаратура очень чувствительная и устанавливать ее надо бы в более глубоком месте. Рядом с этим институтом (приблизительно в километре), в соседней горе есть специальная штольня, которая идет в глубь горы на 200 метров. Но это дело будущего.
Схема подключения системы:
Поскольку датчики необходимо располагать достаточно далеко друг от друга, была придумана и создана система связи для передачи данных от датчика, до какого либо узла с интернет подключением. В нашем случае был выбран WiFi, а также соответствующее железо, необходимое для связи на расстоянии в десятки километров.
В нашем случае был выбран WiFi, а также соответствующее железо, необходимое для связи на расстоянии в десятки километров.
Схема подключения одного датчика получилась следующая:
Датчик → (ethernet) → WiFi client box → (wifi link) → WiFi AccessPoint → Internet → Central server
Съём данных с датчиков:
Для «забора» данных с датчиков используется фирменная программа «SCREAM» — название программы очень в точку, поскольку, как оказалось, человеку, который с данной аппаратурой не работал ранее, многие вещи даже стандартной настройки довольно неочевидны. Несмотря на то, что производитель снабжает и программу, и аппаратуру довольно неплохим и объемным руководством, на момент, когда добираешься до эксплуатации системы, оказывается что за кадром осталось достаточно много, и вынужден доходить путем очень научного тыка. Вкратце — временами, при разборках с программой, ее очередным зависанием и т. д. — громкая, исконно русская речь была совсем нередким явлением.
SCREAM:
Универсальная программа от производителя для работы со всей линейкой сейсмологического оборудования Guralp. Предназначена для контроля оборудования приема и сохранения данных с сейсмометров в реальном времени. Скачать её можно бесплатно с сайта производителя, правда, ссылка на раздел закачек на сайте отсутствует, и её присылают после прохождения простой регистрации. Есть в 2-х вариантах — под Linux и под Win. Код закрыт, распространяются только бинарники. Из всего зоопарка (в хорошем смысле) дистрибутивов Линукс, я уже лет 15 в работе использую только один — это Debian Linux, соответственно, под ним я и настраивал работу данного программного продукта.
Предназначена для контроля оборудования приема и сохранения данных с сейсмометров в реальном времени. Скачать её можно бесплатно с сайта производителя, правда, ссылка на раздел закачек на сайте отсутствует, и её присылают после прохождения простой регистрации. Есть в 2-х вариантах — под Linux и под Win. Код закрыт, распространяются только бинарники. Из всего зоопарка (в хорошем смысле) дистрибутивов Линукс, я уже лет 15 в работе использую только один — это Debian Linux, соответственно, под ним я и настраивал работу данного программного продукта.
Debian Linux, 64 bit: scream имеется только в виде tar.gz или .rpm пакета (производитель рекомендует CentOS) — и только 32 bit сборка. Для того, чтобы запустить его под 64 битной инсталляцией, необходимо установить пакет ia32libs, который добавит поддержку 32 битных бинарников в 64 битной системе. После этого можно распаковать пакет scream в директорию, где вы планируете его использовать. Запускать его необходимо через прилагающийся .sh скрипт, поскольку он использует собственные библиотеки, и скрипт прописывает к ним путь.
SCREAM программа интерактивная, с GTK интерфейсом, поэтому запускать её нужно из Х-ов, либо под виртуальным Х сервером Xvfb — как это сделал я, если установка X на сервере не нужна.
SCREAM достаточно требователен к процессорным ресурсам, и я много времени и нервов потратил разбираясь с причинами его зависания, которые сильно уменьшились при переносе инсталляции с Dual-Core лаптопа Samsung на двух-ядерный XEON Dell. Хотя, кроме процессора на машинах, все остальное было почти одинаковым (2Г памяти, 250Г HDD), но ситуация изменилась очень чувствительно. Поэтому можно посоветовать, не используйте машину со слабым процессором в качестве сервера для SCREAM. Хотя кто знает, может он патологически Самсунг не переваривает?
Связываем SCREAM и Guralp CMG-6TD:
Чтобы получить данные с сейсмометра, нужно связать Guralp со SCREAM одним из доступных способов: Через COM порт или посредством TCP-IP. Я опишу процедуру связи только по TCP-IP, для краткости. В Guralp используется TCP-serial сервер производства Lantronix, и к нему имеется Telnet и WWW интерфейс для настройки параметров. По умолчанию Guralp (только при включении) пытается получить IP адрес по DHCP. Детально, как присвоить адрес и попасть на WWW интерфейс описывать не буду, поскольку это детально описано в руководстве. Сосредоточимся на тонкостях и настройке. Заходить на WWW интерфейс нужно исключительно через Internet Explorer, поскольку криво написанные Javascript скрипты и другая начинка интерфейса не работают ни в каком другом браузере, выдавая абсолютно неадекватное содержимое полей ввода, таких как IP адрес и т. д. Поскольку я Windows использую очень редко, то, что под Internet Exploiter можно нормально все настроить — понимание пришло не сразу. Другая тонкость: странички настроек кешируются, и при следующем входе, после применения настроек, показывают старую информацию, обновление не помогает. Поэтому эксплорер нужно закрывать, запускать заново (ну или сбрасывать кэш, что дольше), если нужно играться с настройками.
По умолчанию Guralp (только при включении) пытается получить IP адрес по DHCP. Детально, как присвоить адрес и попасть на WWW интерфейс описывать не буду, поскольку это детально описано в руководстве. Сосредоточимся на тонкостях и настройке. Заходить на WWW интерфейс нужно исключительно через Internet Explorer, поскольку криво написанные Javascript скрипты и другая начинка интерфейса не работают ни в каком другом браузере, выдавая абсолютно неадекватное содержимое полей ввода, таких как IP адрес и т. д. Поскольку я Windows использую очень редко, то, что под Internet Exploiter можно нормально все настроить — понимание пришло не сразу. Другая тонкость: странички настроек кешируются, и при следующем входе, после применения настроек, показывают старую информацию, обновление не помогает. Поэтому эксплорер нужно закрывать, запускать заново (ну или сбрасывать кэш, что дольше), если нужно играться с настройками.
Поскольку по DHCP устройство пытается получить адрес только после включения, я настроил статический IP адрес.
Теперь, что нигде не описано: Меню Serial Connection
Поскольку данные забираются с устройства, даже если через TCP-IP все равно используя TCP-Serial сервер, тут у нас есть настройка BaudRate — По умолчанию она (обычно) 19200 — но при использовании более высокого SampleRate для съема данных с Guralp может быть смысл её увеличить. Просто так это делать нельзя, так как данная настройка должна соответствовать настройке выходного ком-порта устройства, которое конфигурируется из другого меню, другим способом. Если они не будут соответствовать друг-другу — WWW интерфейс перестанет функционировать, и будет необходимо восстановить работу, используя Telnet, порт 9999, и там вернуть скорость в соответствии со скоростью внутреннего ком-порта устройства.
Меню Connecion: Выбираете тип соединения. В руководстве это описано очень скудно, и только в общих чертах.
Выбираем протокол (TCP) и если локальный порт установлен в 10001, удалённый порт в 1567 и Remote Host в 0.0. 0.0, то все нормально — подключиться можно с любого IP (в принципе это настройки по умолчанию)
0.0, то все нормально — подключиться можно с любого IP (в принципе это настройки по умолчанию)
Scream: Запускаем, затем правой кнопкой мыши щелкаем на Network → Configure, затем в открывшемся окне выбираем вкладку My Client и опять правой кнопкой щелкаем на пустое поле списка сереров → Add TCP Server → Добавляем IP нашего устройства:10001. Заметьте, что порт 10001 используется на самом Guralp. Нажимаем Ок, и выбрав только что добавленный сервер, нажимаем Ctrl+C (Connect).
Если все нормально, в течение минуты наше устройство должно появиться под Network, в левой панели. При выборе устройства, справа, мы увидим список каналов данных — это данные от датчиков, которые можно просмотреть в виде волновых графиков. Если мы увидели датчик, то значит первая часть настройки выполнена, и можно немного поиграться, посмотреть, как сейсмометр реагирует на легкие толчки пальцами по коробке, например.
На данном этапе первая часть эпопеи закончена. Мы имеем установленный софт SCREAM, и датчик, который с ним, собственно, связан, и отдает данные. Теперь с этими данными нужно что-то сделать. SCREAM умеет не только принимать данные с сейсмометров, но и передавать далее по TCP-IP. Главное, чтобы клиент поддерживал SCREAM протокол.
Теперь с этими данными нужно что-то сделать. SCREAM умеет не только принимать данные с сейсмометров, но и передавать далее по TCP-IP. Главное, чтобы клиент поддерживал SCREAM протокол.
Потратив какое-то время в поисках открытого софта в интернете для обработки сейсмических данных, я остановился на системе «Earthworm» (Земляной червь), поскольку код системы открыт, и есть сотня институтов по всему миру, которые используют эту систему для сбора, автоматизированного анализа и представления сейсмических данных. Обратной стороной медали является то, что система довольно старая, слабо поддерживается, и многие компоненты откровенно кривые и падучие. Но поскольку бесплатной альтернативы не нашёл, пришлось разбираться с ней. Документация, исходный код и бинарники можно найти и скачать отсюда: folkworm.ceri.memphis.edu/ew-doc
В наличие есть 64 битная сборка, но эксплуатация показала что 32 битная версия гораздо менее предрасположена к падениям. Информация по установке системы крайне разрознена, устарелая и рассчитана, скорее, на человека уже знакомого с системой, поэтому разбираться, как её запускать пришлось довольно долго, целая суббота с утра до ночи ушла от момента установки до запуска отрисовки графиков.
EARTHWORM — «И еще земляным червяком!» ((с) шакал из Маугли)
Система построена по принципу многокомпонентости, ядром является бинарник «startstop», который создает необходимые регионы Shared Memory для обмена данными и производит запуск и мониторинг других бинарников. Но, я организовал запуск компонентов отдельно, поскольку в них плохо обрабатываются исключения (в некоторых проблема связи с сервером приводит к аварийному выходу). Соответственно, запускать их необходимо в цикле.
Компоненты:
Поскольку моей базовой целью является не анализ, а только отрисовка данных, я буду использовать только соответствующие этой задаче компоненты:
scream2ew: передача данных от сервера SCREAM во внутренний буфер EARTHWORM
wave_serverV: забор данных из внутреннего буфера, хранение на диске и отдача клиентам по сети
heli_ewII: отрисовка данных на манер helicorder (сейсмограф), и представлен в виде простой WWW страницы. Данные забираются из wave_server
Конфигурационные файлы хранятся в директории run/params и имеют вид daemon_name. d Все использованные мною конфигурационные файлы, можно скачать со странички проекта, которая дана в конце данного обзора. Это может быть очень полезно, поскольку описание параметров, часто, крайне недостаточно.
d Все использованные мною конфигурационные файлы, можно скачать со странички проекта, которая дана в конце данного обзора. Это может быть очень полезно, поскольку описание параметров, часто, крайне недостаточно.
Итак, устанавливаем Earthworm:
Создаем пользователя earthworm:
adduser earthworm su - earthworm
Распаковываем бинарную сборку — earthworm_7.4
создаем директории
run run/datafiles run/gifs run/params run/scripts
перемещаем все файлы из директории earthworm_7.4/params в run/params
редактируем earthworm_7.4/environment/ew_linux.bash
для простоты в секции # Or set your own values directly
добавим
export EW_HOME=/home/earthworm/ export EW_VERSION=earthworm_7.4 export EW_RUN_DIR=$EW_HOME/run
Затем создаем симлинку файла параметров:
ln -s /home/earthworm/earthworm_7. 4/envoironment/earthworm.d /home/earthworm/run/params/earthworm.d
4/envoironment/earthworm.d /home/earthworm/run/params/earthworm.d
Это нужно потому, что разные компоненты ищут данный файл в разных директориях.
При запуске компоненты могут не запуститься с ошибкой «невозможно определить свой ID модуля» — модули и их ID прописаны в файле earthworm.d — просто посмотрите в конфигурации модуля как он себя называет (например MOD_SCREAM2EW) и добавьте его в список модулей со следующим ID — там все интуитивно.
После этого нужно создать скрипты запуска:
#param
#!/bin/bash HOME=/home/earthworm BIN=$HOME/earthworm_7.4/bin EWE=$HOME/earthworm_7.4/environment PARAM=$HOME/run/params SLEEPTIME=2 . $EWE/ew_linux.bash ulimit -c unlimited
#startstop.sh
#!/bin/bash
DIR=`dirname $0`
ME=`basename $0`
ST=/tmp/$ME.stop
EWENV=/home/earthworm/earthworm_7.4/environment
DAEMON=startstop
. $DIR/param
rm $ST
while true; do
echo Starting $DAEMON . create $st to break cycle, and kill the daemon $DAEMON
$BIN/$DAEMON
if test -f "$ST"; then
echo $ME exitting. ..
rm $ST
exit 0
fi
echo Restarting in $SLEEPTIME seconds...
sleep $SLEEPTIME
done
..
rm $ST
exit 0
fi
echo Restarting in $SLEEPTIME seconds...
sleep $SLEEPTIME
done
#scream2ew.sh
#!/bin/bash
DIR=`dirname $0`
ME=`basename $0`
ST=/tmp/$ME.stop
EWENV=/home/earthworm/earthworm_7.4/environment
DAEMON=scream2ew
. $DIR/param
rm $ST
while true; do
echo Starting $DAEMON . create $st to break cycle, and kill the daemon $DAEMON
$BIN/$DAEMON $PARAM/$DAEMON.d
if test -f "$ST"; then
echo $ME exitting...
rm $ST
exit 0
fi
echo Restarting in $SLEEPTIME seconds...
sleep $SLEEPTIME
done
и еще wave_severV.sh и heli_ewII.sh — для них просто замените название программы в переменной DAEMON скрипта scream2ew.sh. Скрипты сделаны так, что цикл прерывается при обнаружении в /tmp файла имя_скрипта.stop и, соответственно, они последовательно запускаются из старт скрипта из init.d
Все скрипты можно скачать на страничке проекта, и приводить их здесь нет никакого смысла.
Теперь нужно уделить внимание конфигурационным файлам:
startstop — startstop_unix. d
d
nRing 3 Ring WAVE_RING 1024 Ring PICK_RING 1024 Ring HYPO_RING 1024 MyModuleId MOD_STARTSTOP # Module Id for this program HeartbeatInt 50 # Heartbeat interval in seconds MyClassName OTHER # For this program MyPriority 0 # For this program LogFile 1 # 1=write a log file to disk, 0=don't KillDelay 10 # seconds to wait before killing modules on HardKillDelay 5 # number of seconds to wait on hard shutdown Process "statmgr statmgr.d" Class/Priority OTHER 0
Строчка Process «name» и Class/Priority указывает, какой из бинарников запускать. Мы запускаем только статус. Остальное будет запущено извне, другими скриптами.
Scream2ew — scream2ew.d
MyModuleId MOD_SCREAM2EW # module id for this instance of scream2ew. RingName WAVE_RING # shared memory ring for input/output LogFile 1 # 0 to turn off disk log file; if 1, do log. Verbose 1 # 1=> log every packet. 0=> don't HeartBeatInterval 30 # seconds between heartbeats PortNumber 1567 Server 192.168.88.1 # If specified name or IP-number this module ChanInfo "DUSH0 6817Z0 TJ DYU -- BHZ 1" ChanInfo "DUSH0 6817N0 TJ DYU -- BHN 2" ChanInfo "DUSH0 6817E0 TJ DYU -- BHE 3"
Тут в chaninfo необходимо помнить, что осуществляется импорт данных из внешней системы, и данные устройства DUSH0 и потока 6817Z0 импортируются в earthworm как TJ DYU – BHZ 1
Называния каналов TJ DYU и т. д. Произвольные, но нужно соблюдать количество символов каждого компонента
wave_serverV — wave_serverV.d
MyModuleId MOD_WAVESERVERV # wave_server's module id
RingName WAVE_RING # name of transport ring to get data from
LogFile 1 # 1=write log file to disk; 0=don't
# 2=write to module log but not stderr/stdout
HeartBeatInt 15 # seconds between heartbeats to statmgr
ServerIPAdr 192. 168.88.1 # address of machine running wave_server: geops.geophys
ServerPort 16022 # port for receiving requests & sending waves
GapThresh 1.5 # threshhold for gap declaration.
SocketTimeout 11000 # Timeout length in MILLISECONDS for socket calls
ClientTimeout 60000 # Optional. Not recommended feature but it does work.
IndexUpdate 10
TankStructUpdate 1
TankStructFile /home/earthworm/run/datafiles/p1000-1.
168.88.1 # address of machine running wave_server: geops.geophys
ServerPort 16022 # port for receiving requests & sending waves
GapThresh 1.5 # threshhold for gap declaration.
SocketTimeout 11000 # Timeout length in MILLISECONDS for socket calls
ClientTimeout 60000 # Optional. Not recommended feature but it does work.
IndexUpdate 10
TankStructUpdate 1
TankStructFile /home/earthworm/run/datafiles/p1000-1. str
# SCNL Record Logo File Size Index Size File Name New.......
# names size (TYPE_TRACEBUF2 only) (megabytes) (max breaks) (full path) Tank......
Tank DYU BHZ TJ -- 4096 INST_UNKNOWN MOD_WILDCARD 1 10000 /home/earthworm/run/datafiles/p1001.tnk
Tank DYU BHN TJ -- 4096 INST_UNKNOWN MOD_WILDCARD 1 10000 /home/earthworm/run/datafiles/p1002.tnk
Tank DYU BHE TJ -- 4096 INST_UNKNOWN MOD_WILDCARD 1 10000 /home/earthworm/run/datafiles/p1003.tnk
Tank DYU BHM TJ -- 4096 INST_UNKNOWN MOD_WILDCARD 1 10000 /home/earthworm/run/datafiles/p1004.tnk
RedundantTankStructFiles 1
RedundantIndexFiles 1
TankStructFile2 /home/earthworm/run/datafiles/p1000-2.
str
# SCNL Record Logo File Size Index Size File Name New.......
# names size (TYPE_TRACEBUF2 only) (megabytes) (max breaks) (full path) Tank......
Tank DYU BHZ TJ -- 4096 INST_UNKNOWN MOD_WILDCARD 1 10000 /home/earthworm/run/datafiles/p1001.tnk
Tank DYU BHN TJ -- 4096 INST_UNKNOWN MOD_WILDCARD 1 10000 /home/earthworm/run/datafiles/p1002.tnk
Tank DYU BHE TJ -- 4096 INST_UNKNOWN MOD_WILDCARD 1 10000 /home/earthworm/run/datafiles/p1003.tnk
Tank DYU BHM TJ -- 4096 INST_UNKNOWN MOD_WILDCARD 1 10000 /home/earthworm/run/datafiles/p1004.tnk
RedundantTankStructFiles 1
RedundantIndexFiles 1
TankStructFile2 /home/earthworm/run/datafiles/p1000-2. str
InputQueueLen 4000
MaxMsgSize 4096
SocketDebug 0
ReCreateBadTanks 1
QueueReportInterval 5
str
InputQueueLen 4000
MaxMsgSize 4096
SocketDebug 0
ReCreateBadTanks 1
QueueReportInterval 5
Тут мы создаем так называемые танки (цистерны) — там хранятся данные, принятые с устройств. Они же могут быть запрошены по сети. Обратите внимание, что созданные каналы DY BHZ TJ — как раз идут в отдельные танки. Также параметр MaxMsgSize 4096 обязателен для работы со SCREAM. Необходимо добавить что wave_serverV не идеален для хранения данных, и в случае если блоки данных с датчика приходят в перемешку, т.е. не соблюдается их очередность по таймстампу, то он данные блоки отвергает. Есть альтернативная реализация wave_server на JAVA — Winston WaveServer — университета Аляски, ссылку на закачку удалось найти только в архивах почтовой переписки пользователей Earthworm, потому привожу ее в конце, в ссылках. Он реальзует некоторые (но не все) фичи и баги оригинального и хранит данные в MySQL базе.
Необходимо добавить что wave_serverV не идеален для хранения данных, и в случае если блоки данных с датчика приходят в перемешку, т.е. не соблюдается их очередность по таймстампу, то он данные блоки отвергает. Есть альтернативная реализация wave_server на JAVA — Winston WaveServer — университета Аляски, ссылку на закачку удалось найти только в архивах почтовой переписки пользователей Earthworm, потому привожу ее в конце, в ссылках. Он реальзует некоторые (но не все) фичи и баги оригинального и хранит данные в MySQL базе.
heli_ewII — heli_ewII.d
LogSwitch 1 MyModuleId MOD_HELI_EWII RingName WAVE_RING HeartBeatInt<-->10 wsTimeout 30 # time limit (secs) for any one interaction with a wave server.WaveServer 192.168.88.1 16022 "Dushanbe" GifDir /home/earthworm/run/gifs # S C N L 04 05 06 07 08 09 10 11 12 13 14 15 Comment Plot DYU BHN TJ -- 12 5 +5 TJT 1 1 20 20 15 0.1 0.05 1 "Dushanbe Center N" Plot DYU BHZ TJ -- 12 5 +5 TJT 1 1 20 20 15 0.1 0.05 1 "Dushanbe Center Z" Plot DYU BHE TJ -- 12 5 +5 TJT 1 1 20 20 15 0.1 0.05 1 "Dushanbe Center E" Days2Save 365 # Number of days to display on web page; default=7 UpdateInt 1 # Number of minutes between updates; default=2 RetryCount 2 # Number of attempts to get a trace from server; default=2 Clip 5 SaveDrifts Make_HTML IndexFile welcome.
html Debug WSDebug
Здесь указывается, какие потоки данных запрашивать у wave_serverV и как их отрисовывать. Все, достаточно, интуитивно. Параметр количества часов назад не работает, поэтому график при запуске будет пустой, и только через некоторое время (до 15 минут) начнут появляться данные. При запуске данный модуль округляет время и часто хочет продолжить со следующего 15-минутного интервала. Это видно в лог-выводе.
Теперь можно в ручном режиме запустить скрипты в следующей последовательности:
startstop.sh scream2ew.sh wave_serverV.sh heli_ewII.sh
Для целей отладки делать это лучше в разных терминалах, чтобы видеть, какие ошибки выдаются и работают ли они вообще.
Чтобы у wave_server появилось достаточно данных, может пройти пару минут, только потом heli_ewII эти данные обнаружит и сможет их отрисовать.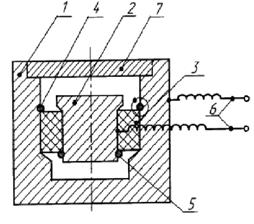
Конечно, в мире есть большое количество и другого сейсмологического оборудования и программного обеспечения, например Nanometrics, канадского производства, делает очень хорошие, законченные системы, с подключением к спутниковому терминалу. Это означает, что в центре устанавливается HUB VSAT и в отдаленных горных районах, устанавливаются VSAT размером поменее, которые периодически отправляют данные со своих датчиков. Но это уже тема другого обзора.
На этом я хотел бы завершить данную тему. Тема, конечно, очень большая, и предстоит еще разобраться с вопросами автоматизированного анализа данных, вычисления эпицентра и магнитуды толчков. Earthworm содержит достаточно мощный инструментарий для всего этого.
Страничка проекта:
http://seismo.eastera.tj
Конфигурационные файлы и скрипты:
http://seismo.eastera.tj/downloads
Живой helicorder проекта:
http://seismo.eastera.tj/helicorder
Earthworm:
http://folkworm.ceri.memphis.edu/ew-doc/
Альтеративная реализация wave_server на JAVA: http://www.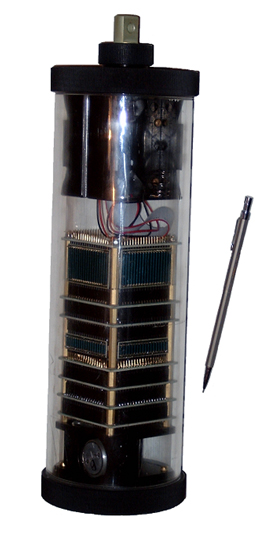 avo.alaska.edu/Software/winston/W_Manual_SR.html
avo.alaska.edu/Software/winston/W_Manual_SR.html
Helicorder страничка Maryland:
http://www.ceri.memphis.edu/seismic/stations/index.html
Сейсмические датчики нового поколения для поиска нефти и газа
RU (11) (51) МПК G01M 7/00 ( )
РОССИЙСКАЯ ФЕДЕРАЦИЯ (19) RU (11) (51) МПК G01M 7/00 (2006.01) 167 938 (13) U1 ФЕДЕРАЛЬНАЯ СЛУЖБА ПО ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ (12) ОПИСАНИЕ ПОЛЕЗНОЙ МОДЕЛИ К ПАТЕНТУ (21)(22) Заявка: 2016119469,
Подробнеекоординаты эпицентра, поскольку враща-
ЭЛЕКТРОХИМИЯ, 04, том 50, 4, с. 39 397 УДК 544.38 ЭКСПЕРИМЕНТАЛЬНОЕ МОДЕЛИРОВАНИЕ ТЕМПЕРАТУРНОЙ ЗАВИСИМОСТИ АМПЛИТУДНО-ЧАСТОТНОЙ ХАРАКТЕРИСТИКИ ПРЕОБРАЗОВАТЕЛЕЙ ВРАЩАТЕЛЬНЫХ ДВИЖЕНИЙ НА ОСНОВЕ ЭЛЕКТРОХИМИЧЕСКИХ
39 397 УДК 544.38 ЭКСПЕРИМЕНТАЛЬНОЕ МОДЕЛИРОВАНИЕ ТЕМПЕРАТУРНОЙ ЗАВИСИМОСТИ АМПЛИТУДНО-ЧАСТОТНОЙ ХАРАКТЕРИСТИКИ ПРЕОБРАЗОВАТЕЛЕЙ ВРАЩАТЕЛЬНЫХ ДВИЖЕНИЙ НА ОСНОВЕ ЭЛЕКТРОХИМИЧЕСКИХ
Рисунок 8 Блок-схема системы управления
Глава II Построение модели системы управления Реальная система управления состоит из определенного числа взаимосвязанных приборов и устройств, включая, конечно, объект управления, обладающих различной
ПодробнееПродукция Лаборатории Микроприборов
Продукция Лаборатории Микроприборов Лаборатория Микроприборов российская компания, занимающаяся разработкой и производством устройств в сфере микроэлектромеханических (MEMS) систем. Основное направление
ПодробнееRU (11) (51) МПК H03F 1/32 ( )
РОССИЙСКАЯ ФЕДЕРАЦИЯ (19) RU (11) (51) МПК H03F 1/32 (2006. 01) 167 770 (13) U1 ФЕДЕРАЛЬНАЯ СЛУЖБА ПО ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ (12) ОПИСАНИЕ ПОЛЕЗНОЙ МОДЕЛИ К ПАТЕНТУ (21)(22) Заявка: 2016120194,
01) 167 770 (13) U1 ФЕДЕРАЛЬНАЯ СЛУЖБА ПО ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ (12) ОПИСАНИЕ ПОЛЕЗНОЙ МОДЕЛИ К ПАТЕНТУ (21)(22) Заявка: 2016120194,
RU (11) (13) C1
РОССИЙСКАЯ ФЕДЕРАЦИЯ (19) RU (11) 2523188 (13) C1 (51) МПК H03L7/16 (2006.01) ФЕДЕРАЛЬНАЯ СЛУЖБА ПО ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ, ПАТЕНТАМ И ТОВАРНЫМ ЗНАКАМ (12) ОПИСАНИЕ ИЗОБРЕТЕНИЯ К ПАТЕНТУ Статус:
ПодробнееOOO ПЛАЗМЕННЫЕ ИСТОЧНИКИ», ГОР. ТОМСК
OOO ПЛАЗМЕННЫЕ ИСТОЧНИКИ», ГОР. ТОМСК Presentation for Grant Committee Встреча участников Кластера ЯТ Фонда «Сколково», 29 Мая 2012 Город, Июнь 4, 2012 Проект направлен на создание нового поколения источников
ПодробнееЭЛЕКТРОРАДИОИЗМЕРЕНИЯ
МИНИСТЕРСТВО ОБРАЗОВАНИЯ РОССИЙСКОЙ ФЕДЕРАЦИИ Государственное образовательное учреждение высшего профессионального образования- «Оренбургский государственный университет» Колледж электроники и бизнеса
Подробнее
Контроллер. фильтрации. погрешностей
фильтрации. погрешностей
Панкратов Г.А., Китаев В.Н., Перебатов В.Н., Тронин С.В. ВЗМЖНСТИ РАЗРАБТКИ ИЗМЕРИТЕЛЬНГ БЛКА ВИБРЧАСТТНЫХ АКСЕЛЕРМЕТРВ С КМПЕНСАЦИЕЙ ПГРЕШНСТЕЙ Аннотация: В данной работе рассмотрены результаты работ
ПодробнееПАТЕНТНАЯ ЗАЩИТА Патент на изобретение
НАЗНАчЕНИЕ Трансформаторы изготавливаются в климатическом исполнении «У» или «Т» категории размещения 3 по ГОСТ 151. Допускается использование трансформаторов обоих исполнений при тем пе ра ту ре окружающего
ПодробнееВестник науки Сибири (7)
Барбин Евгений Сергеевич, аспирант кафедры точного приборостроения Института неразрушающего контроля ТПУ. E-mail: [email protected]. Область научных интересов: микромеханические системы. Баранов Павел Федорович,
Подробнеедля метрологического обеспечения
НАУЧНО ПРОИЗВОДСТВЕННОЕ ПРЕДПРИЯТИЕ ФГУП «ВНИИМ им. Д. И. Менделеева» Эталонные средства измерения для метрологического обеспечения измерительных каналов цифровой подстанции «НПП Марс Энерго», Санкт Петербург,
Д. И. Менделеева» Эталонные средства измерения для метрологического обеспечения измерительных каналов цифровой подстанции «НПП Марс Энерго», Санкт Петербург,
Измеритель абсолютных перемещений
Измеритель абсолютных перемещений Классификация по МПК: G01B Патентная информация Патент на изобретение :2097685 Автор:Гужов В.И., Нечаев В.Г. Патентообладатель:Новосибирский государственный технический
Подробнеедатчики различной модальности
Тема 1. Основы проектирования информационных устройств План занятия 1. Основные понятия и определения 2. Датчики и их характеристики 3. Основы теории измерений 1. Основные понятия и определения Чувствительным
ПодробнееДатчики уровня топлива емкостные DUT-E
Приложение к свидетельству 45728 Лист 1 об утверждении типа средств измерений Датчики уровня топлива емкостные DUT-E Назначение средства измерений ОПИСАНИЕ ТИПА СРЕДСТВА ИЗМЕРЕНИЙ Датчики уровня топлива
ПодробнееRU (11) (13) C1
РОССИЙСКАЯ ФЕДЕРАЦИЯ (19) RU (11) 2117506 (13) C1 (51) МПК 6 A61N5/06 ФЕДЕРАЛЬНАЯ СЛУЖБА ПО ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ, ПАТЕНТАМ И ТОВАРНЫМ ЗНАКАМ (12) ОПИСАНИЕ ИЗОБРЕТЕНИЯ К ПАТЕНТУ Статус: по данным
ПодробнееСамодвижущиеся машины
Инновационный проект Самодвижущиеся машины Инициатор проекта: Фролов Александр Владимирович Тула 2011 1 Цель проекта В ходе проекта, планируется: Создать в России производство демонстрационных машин, производящих
ПодробнееНазвание доклада: Применение датчиков динамического давления
Авторы : (А. А. Кирпичев, к.т.н.), ООО «ГлобалТест», г. Саров, Россия, Тел.: (83130) 4-02-44, Факс: (83130) 4-38-55, E-mail: [email protected] (А.А. Симчук), ООО «ГлобалТест», г. Саров, Россия, Тел.:
А. Кирпичев, к.т.н.), ООО «ГлобалТест», г. Саров, Россия, Тел.: (83130) 4-02-44, Факс: (83130) 4-38-55, E-mail: [email protected] (А.А. Симчук), ООО «ГлобалТест», г. Саров, Россия, Тел.:
RU (11) (51) МПК G01K 11/32 ( ) A61B 5/01 ( )
РОССИЙСКАЯ ФЕДЕРАЦИЯ (19) RU (11) (1) МПК G01K 11/32 (06.01) A61B /01 (06.01) 170 770 (13) U1 R U 1 7 0 7 7 0 U 1 ФЕДЕРАЛЬНАЯ СЛУЖБА ПО ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ (12) ОПИСАНИЕ ПОЛЕЗНОЙ МОДЕЛИ К ПАТЕНТУ
Подробнее1E+09 1E+07 1E+05 1E+03 1E+01. RaФ
Основные характеристики ФР Сопротивление ФР Различают: темновое сопротивление ФР; характеристику зависимости сопротивления от падающего потока излучения R(Ф) или освещенности R(E). Величина темнового сопротивления
ПодробнееRU (11) (51) МПК G01C 19/56 ( )
РОССИЙСКАЯ ФЕДЕРАЦИЯ (19) RU (11) (51) МПК G01C 19/56 (2012. 01) 2015 152 545 (13) A ФЕДЕРАЛЬНАЯ СЛУЖБА ПО ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ (12) ЗАЯВКА НА ИЗОБРЕТЕНИЕ (21)(22) Заявка: 2015152545, 08.12.2015
01) 2015 152 545 (13) A ФЕДЕРАЛЬНАЯ СЛУЖБА ПО ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ (12) ЗАЯВКА НА ИЗОБРЕТЕНИЕ (21)(22) Заявка: 2015152545, 08.12.2015
RU (11) (13) C1
Стр. 1 из 8 16.04.2018, 13:47 РОССИЙСКАЯ ФЕДЕРАЦИЯ (19) RU (11) 2 643 075 (13) C1 ФЕДЕРАЛЬНАЯ СЛУЖБА ПО ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ (51) МПК G02B 17/06 (2006.01) (12) ОПИСАНИЕ ИЗОБРЕТЕНИЯ К ПАТЕНТУ
ПодробнееRU (11) (51) МПК E21B 34/02 ( ) F17D 3/01 ( )
РОССИЙСКАЯ ФЕДЕРАЦИЯ (19) RU (11) (51) МПК E21B 34/02 (2006.01) F17D 3/01 (2006.01) 169 382 (13) U1 R U 1 6 9 3 8 2 U 1 ФЕДЕРАЛЬНАЯ СЛУЖБА ПО ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ (12) ОПИСАНИЕ ПОЛЕЗНОЙ МОДЕЛИ
ПодробнееПроект реестра рисков компании «ABC»
Проект реестра рисков компании «ABC» Категория Описание и последствий реализации реализации Риски персонала 1. Высокая зависимость от ключевых сотрудников (ведущие разработчики) Потеря технологии Получение
Высокая зависимость от ключевых сотрудников (ведущие разработчики) Потеря технологии Получение
Рисунок 1 — Состав ГАЛС-Д1М
Назначение ГАЛС-Д1М: Изделие ГАЛС-Д1М предназначено для навигации, ориентации и курсоуказания линейной военной техники и вооружения, использования в условиях РЭБ в составе автоматизированных систем управления
ПодробнееО программе. Исходя из вышесказанного:
О программе В соответствии с решением наблюдательного совета Фонд содействия развитию малых форм предприятий в научно-технической сфере объявляет о начале новой программы — «СТАРТ» — по финансированию
Подробнее
ПРОГРАММА ЦЕЛЕВЫХ РАСХОДОВ ПРЕЗИДИУМА РАН «ПОДДЕРЖКА ИННОВАЦИЙ И РАЗРАБОТОК» 28.03.2011 Координатор программы вице-президент РАН академик С. М. Алдошин Прием проектов: Багрова Валентина Сергеевна (499)
М. Алдошин Прием проектов: Багрова Валентина Сергеевна (499)
Широкополосный Сейсмометр СМЕ-6211
Особенности: Широкополосный Сейсмометр СМЕ-6211 Высокочувствительный широкополосный сейсмометр Большой динамический диапазон Простая установка Не требует арретирования и центрирования массы Встроенная
ПодробнееУченые из МФТИ провели успешные испытания беспроводной сейсмической системы для поиска углеводородов
Учеными МФТИ реализован проект по разработке беспроводной сейсмической системы на основе молекулярных датчиков высокой чувствительности для поиска углеводородов в переходных зонах суша-море до глубины 500 м.
Учеными МФТИ реализован проект по разработке беспроводной сейсмической системы на основе молекулярных датчиков высокой чувствительности для поиска углеводородов в переходных зонах суша-море до глубины 500 м.
Об этом они поведали 2 февраля 2017 г.
Ученые из МФТИ проводят не только теоретические исследования, но и создают приборы для практического применения.
При финансировании Министерства образования и науки РФ инженеры из лаборатории Центр молекулярной электроники в МФТИ разработали и успешно провели испытания беспроводной сейсмической системы для поиска углеводородов в переходных зонах суша-море до глубины 500 м.
Основная цель лаборатории — разработка инновационной приборной базы средств измерений кинематических параметров движения на основе принципов молекулярно-электронного механизма переноса заряда.
В основе системы — молекулярно-электронная технология, разработанная в МФТИ и успешно реализованная в сейсмических датчиках, поставляемых по всему миру (Европа, Америка, Юго-Восточная Азия и др.).
«Суть данной технологии состоит в применении в качестве чувствительного элемента датчиков системы микроэлектродов специальной геометрии, погруженных в раствор электролита», — объясняет руководитель лаборатории В. Агафонов.
Агафонов.
Физический эффект, получивший название молекулярно-электронный перенос, положенный в основу работы такого рода устройств, состоит в сильной зависимости величины межэлектродного тока насыщения от скорости течения жидкости в межэлектродном пространстве.
Говоря простым языком, внутри датчиков есть каналы с электропроводящей жидкостью и электродами. При изменении положения датчика, жидкость собирает заряды, протекая через электроды.
При этом жидкость создает дополнительный сигнальный электрический ток. Узнать величину внешнего механического сигнала — это уже дело техники.
Экономическую выгоду использования таких систем повышает отсутствие движущихся механических деталей в датчиках. Это увеличивает надежность, простоту в эксплуатации, устойчивость к ударам и вибрациям, и снижает стоимость датчиков.
Разработанные модули сбора данных, входящие в данную систему, могут использоваться также в составе систем других производителей.
То есть возможна поставка не только разработанной системы целиком, но и отдельных ее модулей.
Это существенно повышает коммерческий потенциал разработки, так как на начальном этапе геофизические компании, заинтересованные в покупке данной системы, могут приобрести небольшое количество модулей (от 10 до 100), протестировать их работу в составе используемых ими сейсмических систем, после чего приобрести полноценный комплект оборудования.
Ученые продолжают работы по совершенствованию сейсмодатчиков для поиска нефти и газа (геофонов), создаваемых под брендом ИГЕО.
Подобные системы являются необходимым элементом для проведения поиска нефти и газа в прибрежных зонах и на глубинах до 500 м.
Первые полевые испытания, проведенные в августе 2016 г, показали перспективные результаты: система готова для работы на суше и в воде.
В настоящее время в России не производятся системы с аналогичными характеристиками, и компаниям-потребителям приходится использовать дорогостоящее импортное оборудование.
По этой причине данное оборудование представляет собою уникальную разработку, которая замещает импортные аналоги и может использоваться в реальных условиях.
Потенциальными потребителями в данном применении являются нефтесервисные и геофизические компании, например, входящие в структуру Росгеология (Иркутскгеофизика, Севморнефтегеофизика и др.) или частные компании, работающие на шельфе (МАГЭ, Геотек и пр.).
В 2017 г ученые планируют провести совместные работы с зарубежными коллегами, получить результаты и поделиться ими с научным сообществом.
автореферат диссертации по приборостроению, метрологии и информационно-измерительным приборам и системам, 05.11.01, диссертация на тему:Сейсмодатчики для систем защиты реакторных установок АЭС
Автореферат диссертации по теме «Сейсмодатчики для систем защиты реакторных установок АЭС»
На правах рукописи
БОРИСОВ Павел Александрович
СЕЙСМОДАТЧИКИ ДЛЯ СИСТЕМ ЗАЩИТЫ РЕАКТОРНЫХ УСТАНОВОК АЭС
Специальность 05.11.01 — Приборы и методы измерения (электрические величины)
Автореферат диссертации на соискание ученой степени кандидата технических наук
ПЕНЗА 2005
Работа выполнена на кафедре «Информационно-измерительная техника» Пензенского государственного университета.
Научный руководитель — доктор технических наук,
профессор Добровинский И. Р.
Официальные оппоненты: доктор технических наук,»
профессор Чернецов В. И.; кандидат технических наук, доцент Когельман Л. Г.
Ведущее предприятие — ФГУП «НИИЭМП».
Защита диссертации состоится 27 октября 2005 г., в 14 часов, на заседании диссертационного совета Д 212.186.02 в Пензенском государственном университете по адресу: 440026, г. Пенза, ул. Красная, 40.
С диссертацией можно ознакомиться в библиотеке Пензенского государственного университета.
Автореферат разослан 27 сентября 2005 г.
Ученый секретарь
диссертационного совета
доктор технических наук, профессор
Светлов А. В.
ggflg-У
Z2I7Z0I
ОБЩАЯ ХАРАКТЕРИСТИКА РАБОТЫ
Актуальность темы. Антисейсмическая защита промышленных объектов, особенно таких, как атомные станции, имеет огромное практическое значение для человеческого общества, поскольку землетрясения представляют собой опасное природное явление. Все большее число стран теперь строят и эксплуатируют ядерные реакторы для производства электроэнергии. Из-за тяжести последствий аварий таких реакторов их проектирование и эксплуатация подвергаются строгому правительственному контролю. Проект станции составляется так, чтобы рассчитанные колебания грунта не могли привести к нарушению работы станции и не создали угрозы для безопасности и здоровья обслуживающего персонала и местного населения.
Все большее число стран теперь строят и эксплуатируют ядерные реакторы для производства электроэнергии. Из-за тяжести последствий аварий таких реакторов их проектирование и эксплуатация подвергаются строгому правительственному контролю. Проект станции составляется так, чтобы рассчитанные колебания грунта не могли привести к нарушению работы станции и не создали угрозы для безопасности и здоровья обслуживающего персонала и местного населения.
Для обеспечения автоматической аварийной остановки реактора при землетрясениях заданной интенсивности предусматривается применение системы сейсмометрического контроля и сигнализации, формирующей команды на остановку реактора, а также автоматическую регистрацию колебаний на уровне подошвы здания реакторной установки. Такие решения нацелены на максимальную предусмотрительность, значительно превышающую ту, что считается необходимой для других типов сооружений. В этой связи к сейсмодатчикам систем аварийной защиты ядерных реакторов предъявляются жесткие требования к показателям надежности и стабильности метрологических характеристик.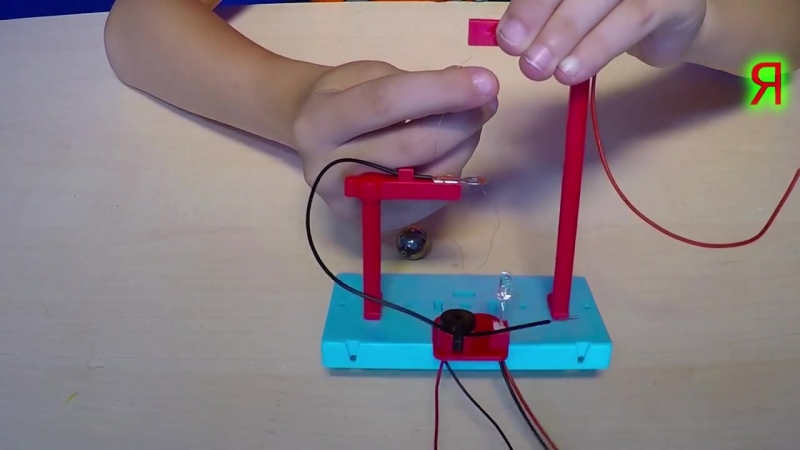
Решению многих вопросов, связанных с разработкой методов и средств измерений параметров механических колебательных процессов, способствовали работы А. Н. Крылова, Б. Б. Голицына, Ю. И. Иориша, Л. Д. Гика и др.
Однако в целом состояние научных разработок современных сейсмодатчиков не позволяет решить многих задач проектирования.
Известны применяемые в измерительной технике для измерения параметров колебаний пьезоэлектрические сейсмоприемники, состоящие из инерционного элемента, совмещенного с пьезоэлектрическим преобразователем. Неудовлетворительные чувствительность и точность измерений низкочастотных колебаний, а также значительная чувствительность указанных датчиков к неизмеряемым компо-
нентам не позволяют применять их в системах аварийной защиты реакторов.
Известны также датчики, в которых в качестве преобразователя сейсмических колебаний в электрический сигнал применяется дифференциальный трансформатор. В них подвижные и неподвижные обмотки дифференциального трансформатора размещены на корпусе и инерционном элементе соответственно. Их взаимное смещение при воздействии на датчик сейсмоускорения, изменяя коэффициент трансформации, приводит к пропорциональному изменению амплитуды выходного сигнала. К числу недостатков таких датчиков относятся неудовлетворительная стабильность метрологических характеристик и низкая устойчивость к воздействию мощных электромагнитных помех, характерных для процесса эксплуатации на энергетических объектах.
Их взаимное смещение при воздействии на датчик сейсмоускорения, изменяя коэффициент трансформации, приводит к пропорциональному изменению амплитуды выходного сигнала. К числу недостатков таких датчиков относятся неудовлетворительная стабильность метрологических характеристик и низкая устойчивость к воздействию мощных электромагнитных помех, характерных для процесса эксплуатации на энергетических объектах.
В настоящее время известны сейсмодатчики, предназначенные для работы в составе аппаратуры индустриальной антисейсмической защиты, которые представляют собой индукционные виброметры, обладающие высокой чувствительностью. Однако следует отметить, что эти сейсмодатчики обладают рядом существенных недостатков:
1. Невозможность калибровки датчиков косвенными методами.
2. Значительные масса и габариты.
3. Ограниченный частотный диапазон измерений и существенная нелинейность амплитудно-частотной характеристики (АЧХ) внутри этого диапазона, обусловленные использованием колебательной системы датчика в режиме виброметра.
4. Неудовлетворительная устойчивость к электромагнитным помехам.
5. Применение алгоритма определения модуля вектора сейсмоускорения как суммы квадратов проекций вектора на три ортогональные оси X, У, 2, особенностью которого являются невысокая точность и получение нелинейной функции преобразования.
Решение поставленных выше задач обусловливает актуальность представленной работы.
Цель работы состоит в развитии теории измерений сейсмоколе-баний, обеспечивающей создание на ее основе сейсмодатчиков для
аппаратуры аварийной защиты атомных станций, отличающихся высокими метрологическими характеристиками, показателями надежности и помехоустойчивости.
Для достижения поставленной цели в работе решались следующие основные задачи:
1. Развитие методов измерений сейсмоускорений на основе исследований характеристик измерительных преобразователей инерционного действия.
2. Разработка и определение основных параметров сейсмоприем-ников, являющихся основным функциональным узлом сейсмодатчика.
3. Совершенствование алгоритма определения модуля вектора сейсмоускорения.
4. Разработка и исследование характеристик сейсмодатчиков для систем защиты реакторных установок АЭС.
Методы исследования
Теоретические исследования базируются на положениях теории электрических цепей, теории автоматического регулирования, теории погрешностей, теории математической статистики, методах математического анализа, теории вероятностей. Основные теоретические положения и результаты моделирования на ЭВМ подтверждены экспериментальными исследованиями.
Моделирование проводилось в среде МАТЬАВ.
Научная новизна работы состоит в следующем:
1. Развит метод измерений сейсмоколебаний, который позволяет расширить частотный диапазон в области нижних частот, заключающийся в использовании в качестве сейсмоприемников измерительных преобразователей инерционного действия в режиме акселерометра.
2. Предложен алгоритм определения модуля вектора сейсмоускорения по геометрической сумме проекций вектора на три ортогональные оси X, У, X, позволяющий получить линейную функцию преобразования и повысить точность сейсмодатчиков.
3. Определено аналитическое выражение для определения амплитудного значения модуля вектора сейсмоускорения при гармониче-
ском входном сигнале с применением стандартизованных универсальных вольтметров эффективного значения.
4. Предложен косвенный метод контроля характеристик сейсмо-датчиков тестовым электрическим сигналом без применения виброиспытательного оборудования.
Основные положения, выносимые на защиту:
1. Способ формирования модуля вектора сейсмоускорения по геометрической сумме проекций вектора на три ортогональные оси*, V, X.
2. Способ определения амплитудного значения модуля вектора сейсмоускорения при гармоническом входном сигнале с применением стандартизованных универсальных вольтметров эффективного значения.
3. Косвенный метод контроля характеристик сейсмодатчиков тестовым электрическим сигналом без применения виброиспытательного оборудования.
4. Способ автоматической проверки исправности сейсмодатчиков без отключения от системы аварийной защиты реакторной установки.
Практическая значимость
1. Разработаны и исследованы акселерометры АЛЕ 037 с магнитоэлектрическим уравновешиванием, отличающиеся улучшенными метрологическими характеристиками, пригодные для измерений сейсмоускорений и построения на их основе сейсмодатчиков.
2. Предложен способ определения амплитуды модуля вектора сейсмоускорения при гармоническом входном сигнале, позволяющий применять стандартизованные универсальные вольтметры эффективного значения в процессе изготовления и эксплуатации сейсмодатчиков.
3. Впервые предложен и реализован способ автоматической проверки исправности всего измерительного лракта сейсмодатчиков на протяжении всего жизненного цикла без отключения от системы аварийной защиты реакторной установки.
4. Разработаны и внедрены сейсмодатчики БСД 1, БСД1-01, СД 4, отличающиеся улучшенными метрологическими характеристиками и
показателями надежности по сравнению с аналогами, а также обладающие меньшими массой и габаритами.
5. Предложены обоснованные технические и методические решения, внедрение которых позволяет обеспечить соответствие сейсмо-датчиков БСД 1, БСД 1-01, СД 4 требованиям IV группы исполнения по жесткости электромагнитной обстановки ГОСТ Р 50746-00. Это позволяет улучшить их эксплуатационные характеристики и гарантирует безопасную эксплуатацию другим техническим средствам.
Реализация работы
Результаты теоретических и экспериментальных исследований получили практическое воплощение в разработанных в НИИ физических измерений сейсмодатчиках типа: БСД 1, БСД 1-01, СД 4.
Перечисленные выше сейсмодатчики успешно эксплуатируются в России и за ее границами на таких АЭС, как Балаковская (Россия), Калининская (Россия), Ровенская (Украина), Южно-Украинская (Украина), Запорожская (Украина), Хмельницкая (Украина). Проведена поставка комплекта сейсмодатчиков на АЭС «Бушер» (Иран). Планируется эксплуатация сейсмодатчиков на АЭС Болгарии и Индии.
Апробация работы. Основные положения диссертационной работы обсуждались на международных научно-технических конференциях «Методы и средства измерения в системах контроля и управления» (г. Пенза, 2001, 2002 гг.), на всероссийских научно-технических конференциях «Датчики и детекторы для АЭС» (г. Пенза, 2002, 2004 гг.), на всероссийских научно-технических конференциях «Состояние и проблемы измерений» (г. Москва, 2000, 2002 гг.), на конференциях молодых специалистов «Наукоемкие проекты и высокие технологии -производству XXI века» (г. Пенза, 2002, 2003, 2004 гг.), на Международной молодежной научно-практической конференции «Люди и космос» (г. Днепропетровск, 2002 г.), на Международном симпозиуме «Надежность и качество» (г. Пенза, 2004 г.), на научно-технической конференции молодых специалистов (г. Королев, 2002 г.)
Основные положения диссертационной работы обсуждались на международных научно-технических конференциях «Методы и средства измерения в системах контроля и управления» (г. Пенза, 2001, 2002 гг.), на всероссийских научно-технических конференциях «Датчики и детекторы для АЭС» (г. Пенза, 2002, 2004 гг.), на всероссийских научно-технических конференциях «Состояние и проблемы измерений» (г. Москва, 2000, 2002 гг.), на конференциях молодых специалистов «Наукоемкие проекты и высокие технологии -производству XXI века» (г. Пенза, 2002, 2003, 2004 гг.), на Международной молодежной научно-практической конференции «Люди и космос» (г. Днепропетровск, 2002 г.), на Международном симпозиуме «Надежность и качество» (г. Пенза, 2004 г.), на научно-технической конференции молодых специалистов (г. Королев, 2002 г.)
Публикации. По теме диссертации опубликовано 15 печатных работ, получен патент РФ на изобретение.
Структура и объем работы. Диссертация состоит из введения, четырех глав, заключения, списка литературы, включающего 108 на-
именований, трех приложений. Диссертационная работа изложена на 121 странице основного текста, содержит 36 рисунков и 8 таблиц.
Диссертационная работа изложена на 121 странице основного текста, содержит 36 рисунков и 8 таблиц.
Автор благодарит кандидата технических наук, старшего научного сотрудника «НИИ физических измерений» Папко А. А. за консультацию при выполнении и оформлении диссертационной работы.
КРАТКОЕ СОДЕРЖАНИЕ РАБОТЫ
Во введении обоснована актуальность темы исследования, определено состояние проблемы, сформулирована научная новизна, практическая ценность, цели и задачи исследования.
В первой главе представлены анализ технического уровня современных сейсмодатчиков для систем защиты реакторных установок, а также анализ требований, предъявляемых к ним, который показал, что, наряду с высокими точностными характеристиками, не менее важными являются высокие показатели надежности и помехоустойчивости в условиях жесткой электромагнитной обстановки на атомных станциях.
Проведен анализ характеристик измерительных преобразователей инерционного действия, который показал, что при нижней границе частотного диапазона измерений, близкой к нулю, менее целесообразно использование виброметра и велосиметра. Наиболее полное удовлетворение требованиям измерения сейсмоколебаний обеспечивается при использовании измерительного преобразователя инерционного действия в режиме акселерометра при достаточно высокой собственной частоте и оптимальной степени демпфирования.
Наиболее полное удовлетворение требованиям измерения сейсмоколебаний обеспечивается при использовании измерительного преобразователя инерционного действия в режиме акселерометра при достаточно высокой собственной частоте и оптимальной степени демпфирования.
Во второй главе проведено исследование акселерометров прямого и уравновешивающего преобразования (компенсационных), которое позволило установить, что из-за более высокой точности, широких возможностей высокоточной регулировки динамических характеристик и возможности калибровки всего измерительного тракта применение компенсационных акселерометров более предпочтительно для измерений сейсмоускорений.
Проведено исследование особенностей построения современных компенсационных акселерометров, которое выявило, что из преобразователей перемещения наиболее предпочтительны из-за лучших энергетических характеристик и высоких показателей надежности ем-
костные преобразователи перемещения (ЕПП). В качестве обратных преобразователей (ОП) при построении акселерометров наиболее приемлемыми являются магнитоэлектрические обратные преобразователи, имеющие высокую стабильность и линейность функции преобразования. Структурная схема акселерометра с магнитоэлектрическим уравновешиванием представлена на рисунке 1.
Структурная схема акселерометра с магнитоэлектрическим уравновешиванием представлена на рисунке 1.
Рисунок 1 — Структурная схема акселерометра с магнитоэлектрическим уравновешиванием
Здесь т ь г 2, Тз, т4 — постоянные времени звеньев.
Передаточная функция акселерометра УУ{р), составленная но структурной схеме (см. рисунок 1), равна
т№
Р
1
(О0 хИ’ОЗфнч
( 2
2 ш0 (т,р + 1) рКсКу
1 с
— +
(-С2Р + 1) (хър +1)
+ (хлр + 1)
По передаточной функции проведено моделирование в среде МАТЪАВ, в результате которого получены номинальные амплитудно-частотная характеристика (АЧХ) и фазово-частотная харакгери стика (ФЧХ) цепи уравновешивания акселерометра (рисунок 2). Кривая 1 соответствует следующим параметрам:
XI =3 • КГ4 с, тг = 1-Ю»3 с, тз = 1-Ю-3 с,Т4 = 0,•£> = 0.
Кривая 2 соответствует следующим параметрам: Т| = 3 • Ю-4с, %2~ МО»3 с, Тз = 1-10-3 с, Т4= 0, /)= 1,5. Кривая 3 соответствует следующим параметрам: т 1 = 3 • 10 4с, Т2 = МО-3 с, тз = 1 • 10-3 с, т4 = 1,5 •10″3с,Я= 1,5. Проведенное моделирование позволяет определить конструктивные параметры отдельных узлов (таблица 1) и исследовать режимы работы акселерометра. Характерными значениями параметров акселерометра с ЕПП и магнитоэлектрическим уравновешиванием являются т2 = МО’4 с, Тз = МО»4 с, х4= 1,5-Ю»»3 с. Относительное значение коэффициента газового демпфирования £) = 1,5 , а х 1 = 3 -10″4 с.
Рисунок 2 — Результаты моделирования АЧХ и ФЧХ цепи уравновешивания акселерометра с ЕПП и магнитоэлектрическим ОП
Таблиц а1- Основные параметры акселеромегра с емкостным преобразователем перемещения и магнитоэлектрическим ОП
Наименование, обозначение параметра и единица измерения Значение
Коэффициент усиления оконечного усилителя, Кч 40
Коэффициент преобразования ОП, р, Нм/А 5,210 2
Сопротивление преобразователя «напряжение-ток» в цепи обратного преобразования, К, Ом 2200
Жесткость механического подвеса, с, Нм/рад 210″2
Глубина ООС, Кр = КсКу^/сЯ 1000
Маятниковость, т1, кгм 5,2-10″6
Собственная частота, <»0 = ^КсКу$/т1, рад/с 1906
Смещение центра масс инерционного элемента на диапазон измерений, Дс/я-Д мкм 1,54
Для реализации косвенного метода контроля характеристик в магнитоэлектрическом обратном преобразователе акселерометра предусматривается специальная калибровочная обмотка. При калибровке в нее подается строго нормированная величина тока гармонической или прямоугольной формы, в результате взаимодействия которого с индукцией поля постоянного магнита возникает сила. В этом случае искомое значение сейсмоускорения определяется по результату измерения силы, функционально связанной с ускорением вторым законом Ньютона. Приводится теоретическая оценка достоверности косвенного метода контроля характеристик акселерометра, которая показала, что величина недостоверности косвенного метода будет определяться величиной коэффициента преобразования термо-компенсирующей цепи, достигающей 0,01 %/°С. С полным основанием косвенный метод можно отнести к разряду достоверных для оценки метрологических характеристик сейсмодатчиков с величиной основной погрешности 1,5 % и температурной (0,1-0,05) %/°С.
При калибровке в нее подается строго нормированная величина тока гармонической или прямоугольной формы, в результате взаимодействия которого с индукцией поля постоянного магнита возникает сила. В этом случае искомое значение сейсмоускорения определяется по результату измерения силы, функционально связанной с ускорением вторым законом Ньютона. Приводится теоретическая оценка достоверности косвенного метода контроля характеристик акселерометра, которая показала, что величина недостоверности косвенного метода будет определяться величиной коэффициента преобразования термо-компенсирующей цепи, достигающей 0,01 %/°С. С полным основанием косвенный метод можно отнести к разряду достоверных для оценки метрологических характеристик сейсмодатчиков с величиной основной погрешности 1,5 % и температурной (0,1-0,05) %/°С.
В третьей главе рассмотрены проблемы метрологического обеспечения сейсмодатчиков. Формирование дискретных сигналов сейсмодатчиков, обеспечивающих автоматическую аварийную остановку реактора и запуск регистратора, происходит по модулю вектора сейсмоускорения.2 Б X + Б у + Б 2
Сравнение формул (1) и (3) подтверждает возможность увеличения точности вычисления модуля вектора по сравнению с известными решениями.
Получены обобщенные выражения, позволяющие учитывать погрешность определения вектора сейсмоускорения, обусловленную отклонением осей чувствительности акселерометров Ах, Ау, Аг от осей базиса корпуса сейсмодатчика.
Из-за простоты реализации методов воспроизведения и регистрации сейсмоускорения, изменяющегося по гармоническому закону, целесообразно использовать в качестве тестового сигнала при настройке и аттестации сейсмодатчиков.
Однако при гармоническом входном сигнале в соответствии с алгоритмом (2) модуль вектора представляет собой последовательность положительных синусоидальных полуволн с периодом, равным п.
Необходимые для оценки метрологических характеристик сейсмо-датчиков измерения амплитуды модуля сейсмоускорения связаны с практической невозможностью ее определения по эффективному значению с применением стандартизованных универсальных вольтметров эффективного значения.
Чтобы обеспечить возможность применения стандартизованных вольтметров для контроля характеристик модуля вектора сейсмоускорения при гармоническом входном сигнале, необходимо определить коэффициент, связывающий между собой амплитудное и эффективное значения. Для его определения проведено разложение в ряд Фурье модуля гармонической функции, представляющего собой периодическую неэлементарную функцию
2 4 .сое2ю/ сое4ю/ совбсо/
У =—(—5— + —— + —— + ■•■)• (4)
л п 3 15 35
При этом, учитывая, что универсальный вольтметр эффективного значения не измеряет постоянной составляющей сигнала, равной 2/тс, среднеквадратическое (действующее) значение имеет вид
* II жег4 .сое2оо/ сов4(о/ совбсо/ …
п 3 15 35
»
Вычисление величины у с использованием МаЛсас! позволило определить соотношение между эффективным и амплитудным значениями, имеющее вид
у = 0207-уЛ, (6)
«
где у — среднеквадратическое значение; уЛ — амплитудное значение.
Полученное впервые соотношение (6) позволяет применять стандартизованные универсальные вольтметры эффективного значения в процессе изготовления и эксплуатации сейсмодатчиков для измерения модуля вектора сейсмоускорения при гармоническом входном сигнале.
При измерении модуля вектора постоянного ускорения максимальный вклад в погрешность измерения вносит разориентация измерительных осей акселерометров, обусловленная отклонением осей чув-
ствительиости акселерометров Ах, Ау, Аг от осей базиса корпуса сейс-модатчика, а для динамических измерений число составляющих этой погрешности возрастает. Такими составляющими являются погрешности от неидеальности АЧХ и различия ФЧХ каналов в частотном диапазоне измерений (ЧДИ). При регулировке АЧХ сейсмодатчиков приоритетными требованиями являются обеспечение равенства коэффициента преобразования каналов и незначительность их изменения в ЧДИ. Проводится оценка погрешности измерения модуля вектора сейс-моускорения от неидентичности ФЧХ каналов X, У, 2 сейсмодатчика.
Рассмотрены способы экспериментального определения метроло-гаческих характеристик в процессе производства. Определено, что для метрологического обеспечения производства сейсмодатчиков необходимы поворотные и ротационные платформы для высокоточного воспроизведения постоянных и переменных ускорений, а также низкочастотные виброкалибровочные установки.
В четвертой главе рассматриваются особенности разработки акселерометров АЛЕ 037 и сейсмодатчиков с применением результатов моделирования, приведенных в главе 2-й.
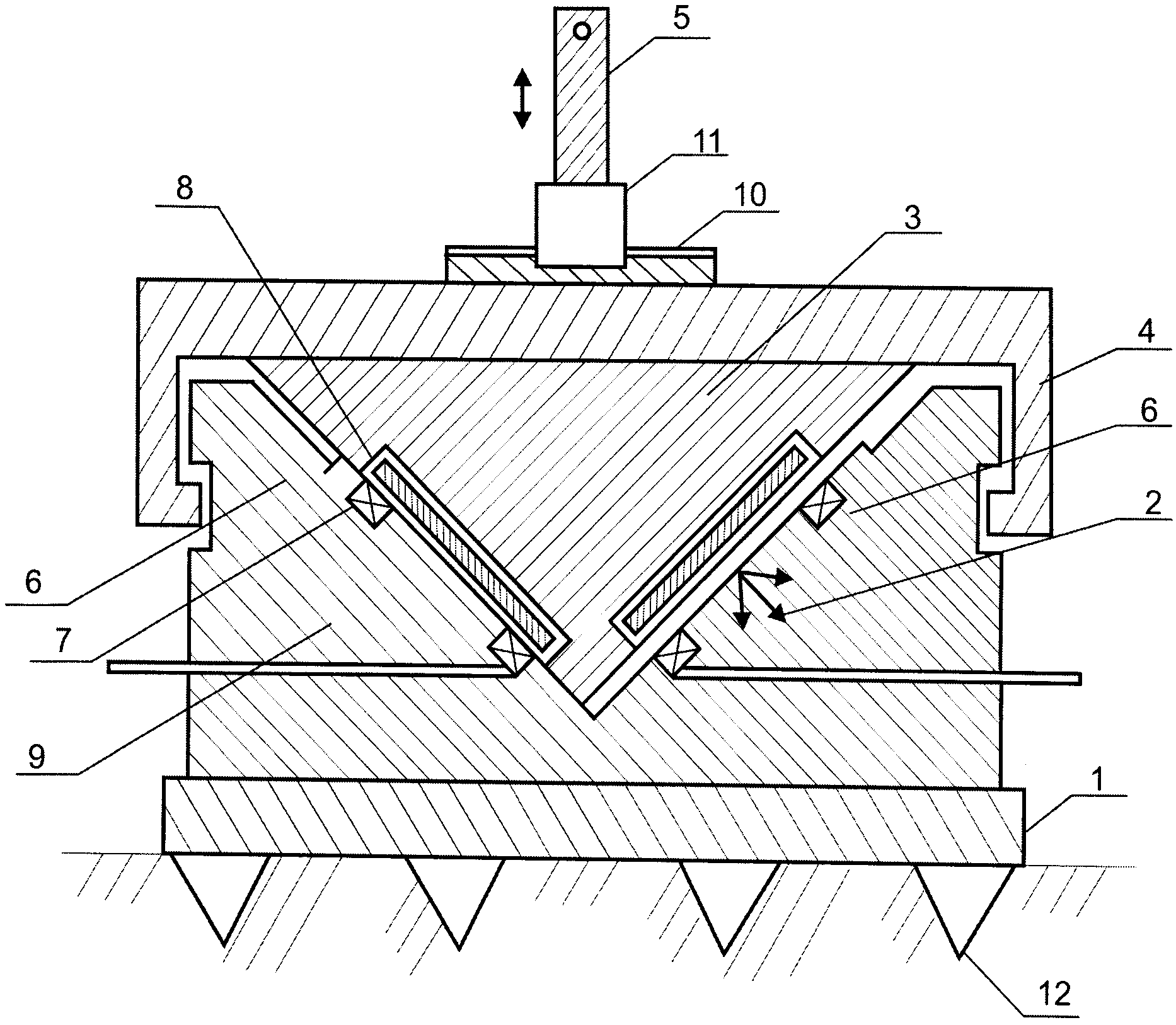
Конструкция чувствительного элемента (ЧЭ) акселерометра с емкостным преобразователем перемещения и магнитоэлектрическим ОП приведена на рисунке 3. ЧЭ содержит прорезь маятника 1, кварцевый маятник 4 с закрепленными на нем катушками ОП 6, подвешенный на опорном кольце 2 посредством двух упругих перемычек 3. Кольцо с двух сторон с зазором 30 мкм зажимается торцами магнитопроводов в трех точках минимальной площади таким образом, чтобы место заделки упругих перемычек оставалось незащемленным. Дифференциальный конденсатор преобразователя перемещения образован поверхностью маятника 4 и обкладками 8, напыленными на кварцевых пластинах 9, жестко прикрепленных к магнитопроводам 7.
Катушка ОП б и постоянные магниты 5 образуют магнитоэлектрический датчик силы, который включен в цепь обратной отрицательной связи.
Электронный блок акселерометра содержит измерительный канал и высокочастотный генератор для питания ЕПП. Измерительный канал содержит входной каскад ЕПП, усилитель постоянного тока, фильтр нижних частот и оконечный усилитель.
Общий вид акселерометра АЛЕ 037 с магнитоэлектрическим уравновешиванием приведен на рисунке 4.
На основе акселерометров АЛЕ 037 в НИИФИ при непосредственном участии автора были разработаны сейсмодатчики БСД 1, СД 4, БСД1-01, общий вид которых представлен на рисунках 5, 6, 7 и 8 соответственно, а основные технические характеристики представлены в таблице 2.
Экспериментально подтверждена эффективность внедрения нового алгоритма определения модуля вектора сейсмоускорения но геометрической сумме проекций вектора на три ортогональные оси X, У, 2, позволившего повысить точность сейсмодатчика.
Приводятся результаты экспериментальной оценки косвенного метода определения метрологических характеристик сейсмодатчиков в сравнении с прямым методом, подтверждающие его достоверность.
Рисунок 3 — ЧЭ акселерометра АЛЕ 037
Рисунок 4 — Общий вил акселерометра АЛЕ 037
Рисунок 5 — Общий вид сейсмодатчика СД 4
Рисунок 6 Обпшй вид сейсмодатчика БСД 1
Рисунок 7 — Общий вид сейсмодатчика БСД1-01
Рисунок 8 — Вид сейсмодатчика БСД1-01 без крышки
Таблица 2 сейсмодатчиков
Основные технические характеристики разработанных
Основные технические характеристики Тип сейсмодатчика
БСД1 БСД 1-01 СД4
Порог выдачи аварийных сигналов (П1), м/с2 0,25-2 0,25-2 0,25-2
Порог начала регистрации (112), м/с 0,05-0,25 0,05-0,25 0,05-0,25
Диапазон измерений аналоговых каналов, м/с2 0,05-4 0,05-4 0,05 — 5,6
Основная погрешность выдачи аварийных сигналов, % 3 3 Ь5
Дополнительная температурная погрешность, %/°С 0,1 0,1 0,05
Частотный диапазон измерений (ЧДИ), Гц 0,1 -32
Скорость затухания АЧХ за пределами ЧДИ, дБ/окт 10
Масса блока, кг 9
Габаритные размеры, ммхммхмм 290x290x108
Потребляемая мощность от сети ~220 Вт 25
Длина кабельной линии, соединяющей блок с регистратором и системой аварийной защиты, м 250 400 600
Возможность калибровки и поверки всего измерительного тракта в процессе эксплуатации +
Устойчивость к воздействию электромагнитных помех с параметрами IV группы степени жесткости ГОСТ Р 50746-2000 +
Впервые предложен и реализован в сейсмодатчике СД 4 режим автоматического контроля исправности в процессе эксплуатации на протяжении всего жизненного цикла без отключения от системы аварийной защиты реакторной установки. При автоматическом контроле исправности (1 раз в 30 мин) на дискретном аварийном выходе датчика появляется одиночный импульс длительностью не более 100 мкс, не влияющий на систему защиты реакторной установки. Наличие этого импульса свидетельствует об исправном состоянии сейсмодатчика и его готовности к выполнению основной функции.
При эксплуатации сейсмодатчиков на атомных станциях одними из самых важных показателей являются показатели надежности. В соответствии с требованиями безопасности для сейсмодатчиков выделено два вида отказов:
— функциональный отказ — отсутствие сигналов на выходах аварийной защиты, а также отсутствие сигнала на запуск регистратора при наличии аварийной или предаварийной ситуации;
— ложное срабатывание — выдача сигналов аварийной защиты и сигналов запуска начала регистрации при отсутствии аварийной или предаварийной ситуации.
Приведены результаты расчетов надежности, которые проводились по методикам, изложенным в РД 95 988-90 «Надежность. Прогнозирование количественных показателей надежности на этапах проектирования» с использованием рабочей инструкции «Расчеты надежности для составных частей комплекса АСУЗ-УСБИ для АЭС «Бушер-1″».
Средняя наработка до отказа сейсмодатчика равна Т0 = 270083,7 ч.
Вероятность пропуска события равна рпроп. аз = 1,8 • Ю-6.
Вероятность ложного срабатывания Рлож аз = 2 • 10~*.
Для повышения надежности на атомных станциях сейсмодатчики эксплуатируются комплектом из трех датчиков, соединенных по схеме «2 из 3», который образует резервируемую восстанавливаемую систему.
Вероятность невыполнения функции защиты на требование Рдз для комплекта из трех датчиков равна РАз= 6,9 • 10~п.
Нарушения функционирования сейсмодатчиков при эксплуатации, возникающие вследствие их электромагнитной восприимчивости, могут привести к ложным срабатываниям и тем самым остановить работу реакторной установки. Предложены обоснованные технические и методические решения, внедрение которых позволяет сейсмодатчикам БСД1, БСД1-01, СД 4 соответствовать параметрам IV группы исполнения по жесткости электромагнитной обстановки ГОСТ Р 50746-00.
ОСНОВНЫЕ ВЫВОДЫ И РЕЗУЛЬТАТЫ
Диссертационная работа посвящена вопросам разработки сейсмодатчиков для систем защиты реакторных установок АЭС.
Основные результаты и выводы работы сводятся к следующему:
1. Развит метод измерений сейсмоколебаний, позволяющий расширить частотный диапазон измерений в области нижних частот, заключающийся в использовании в качестве сейсмоприемников измерительных преобразователей инерционного действия в режиме акселерометра.
2. Проведено моделирование АЧХ и ФЧХ акселерометра с емкостным преобразователем перемещения и магнитоэлектрическим обратным преобразователем, которое позволяет определить конструктивные параметры отдельных узлов и исследовать режимы работы акселерометра.
3. Впервые определено соотношение между эффективным и амплитудным значениями модуля вектора сейсмоускорения при гармоническом входном сигнале, позволяющее применять стандартизованные универсальные вольтметры эффективного значения в процессе изготовления и эксплуатации сейсмодатчиков.
4. Разработаны и исследованы компенсационные акселерометры АЛЕ 037 с магнитоэлектрическим уравновешиванием, отличающиеся улучшенными метрологическими характеристиками и пригодные для измерений сейсмоускорений.
5. Впервые предложен и реализован способ автоматической проверки исправности всего измерительного тракта сейсмодатчиков на
протяжении всего жизненного цикла без отключения от системы аварийной защиты реакторной установки.
6. Предложен и реализован косвенный метод калибровки сейсмо-датчиков внешним электрическим тестовым сигналом, не требующий применения виброиспытательного оборудования.
7. Разработаны и внедрены сейсмодатчики БСД 1, БСД1-01, СД 4, отличающиеся улучшенными метрологическими характеристиками и показателями надежности по сравнению с аналогами, а также обладающие меньшими массой и габаритами.
8. Предложены обоснованные технические и методические решения, внедрение которых позволяет сейсмодатчикам БСД1, БСД 1-01, СД 4 соответствовать параметрам IV группы исполнения по жесткости электромагнитной обстановки ГОСТ Р 50746-00, что приводит к улучшению их эксплуатационных характеристик и гарантирует безопасную эксплуатацию другим техническим средствам.
9. Разработанные сейсмодатчики БСД 1 и СД 4 получили высокую оценку: сейсмодатчик БСД 1 в 2001 г. стал лауреатом программы «Сто лучших товаров России», в 2003 г. в Вашингтоне получил серебряную медаль международной программы «Golden Galaxy», а сейсмодатчик СД 4 удостоен золотой медали на 53-м Всемирном Салоне инноваций, научных исследований и новых технологий «БРЮССЕЛЬ ЭВРИКА 2004», проходившем с 16-го по 21 ноября 2004 г. в г. Брюсселе.
ОСНОВНЫЕ ПУБЛИКАЦИИ ПО ТЕМЕ ДИССЕРТАЦИИ
1. Борисов, П. А. Об измерении модуля знакопеременного вектора / П. А. Борисов // Состояние и проблемы измерений: сб. материалов 8-й Всерос. науч.-техн. конф. — М.: МГТУ им. Н.Э. Баумана, 2002.-С. 93-94.
2. Борисов, П. А. О способе улучшения метрологических характеристик сейсмодатчика для системы аварийной защиты ядерного реактора / П. А. Борисов // Методы и средства измерения в системах контроля и управления: сб. материалов Всерос. науч.-техн. конф. -Пенза, 2002.-С. 176-178.
3. Борисов, П. А. Об исследовании динамических погрешностей определения модуля вектора ускорения / П. А. Борисов, А. А. Папко,
B. Н. Колганов // Датчики и детекторы для авиационной техники: сб. материалов Всерос. науч.-техн. конф. — Пенза, 2003. — С. 78-80.
4. Блок сейсмодатчиков для аварийной защиты атомного реактора / В. Н. Колганов, А. А. Папко, Н. Г. Троянова, Д. А. Баландин, П. А. Борисов // Современные информационные технологии: сб. материалов конф. — Пенза, 2000 — С. 52.
5. Борисов, П. А. Контроль исправности сейсмодатчика / П. А. Борисов // Методы, средства и технологии получения и обработки измерительной информации. Измерения 2002: сб. материалов конф. -Пенза, 2002.-С. 73-75.
6. Борисов, П. А. Способ автоматической проверки блока сейсмодатчиков БСД 1 / П. А. Борисов // Методы и средства измерения в системах контроля и управления: сб. материалов Всерос. науч.-техн. конф. — Пенза, 2001. — С. 20.
7. Пат. №2208815 Российская Федерация. Блок сейсмодатчиков для системы антисейсмической защиты / В. Н. Колганов, А. А. Папко, Н. Г. Троянова, П. А. Борисов. — Опубл. 20.07.2003. Бюл„, № 20.
8. Блок сейсмодатчиков для аварийной защиты атомного реактора / В. Н. Колганов, А. А. Папко, Н. Г. Троянова, Д. А. Баландин, П. А. Борисов Н Состояние и проблемы измерений: сб. материалов 7-й Всерос. науч.-техн. конф. — М.: Mi «ГУ им. Н. Э. Баумана, 2000-
C. 93.
9. Борисов, П. А. Сейсмодатчик СД 4 / П. А. Борисов // Информационно-измерительная техника: межвуз. сб. науч. тр. — Вып. 28. -Пенза, 2003.-С. 65-70.
10. Борисов, П. А. Об особенностях контроля параметров сейсмо-колебаний при землетрясениях / П. А. Борисов, А. А. Папко // Информационно-измерительная техника: межвуз. сб. науч. тр. -Вып. 29. — Пенза, 2005. — С. 120-123.
11. Борисов, П. А. Обеспечение надежности сейсмодатчика СД 4 / П. А. Борисов // Сб. материалов науч.-техн. конф. молодых специалистов. — Королев, 2002.- С. 25.
12. Борисов, П. А. О повышении достоверности прогноза вероятности выполнения функции на требование для сейсмодатчиков СД 4 / П. А. Борисов, А. А. Папко // Надежность и качество 2004: сб. материалов Междунар. симпозиума. — Ч. П. — Пенза, 2004. — С. 359-360.
13. Борисов, П. А. Об использовании акселерометров, разработанных для РКТ, в приборах общепромышленного назначения / П. А. Борисов, В. Н. Колганов, А. А. Папко // Люди и космос: сб. материалов 4-й Междунар. молодежной науч.-практ. конф. — Днепропетровск, 2002. — С. 461.
14. Сейсмодатчики для систем защиты реакторной установки АЭС / А. Н. Трофимов, А. А. Папко, В. Н. Колганов, П. А. Борисов // Датчики и детекторы для АЭС: сб. материалов науч.-техн. конф. -Пенза, 2002.-С. 164-165.
15. Борисов, П. А. О косвенном методе контроля метрологических характеристик сейсмодатчиков / П. А. Борисов, А. А. Папко, О. Н. Герасимов // Датчики и детекторы для АЭС: сб. материалов 2-й Всерос. науч.-техн. конф. — Пенза, 2004. — С./16. Бумага писчая. Печать офсетная. Усл. печ. л. 1,16. Заказ № 576. Тираж 100.
Издательство Пензенского государственного университета. 440026, Пенза, Красная, 40
»2044«
РНБ Русский фонд
2006-4 22425
Оборудование для сбора сейсмических данных — PetroWiki
Для сбора сейсмических данных требуется источник энергии для генерации волн и датчики для приема этих волн. Подходящий источник энергии и приемник зависят от местоположения и области применения. В этой статье описываются различные типы оборудования, используемого для сбора сейсмических данных.
Импульсные источники
Существует множество сейсмических источников, которые могут прикладывать вертикальные импульсные силы к поверхности земли. Эти устройства являются надежными источниками энергии для наземных сейсмических работ.В эту категорию источников входят гравитационные капельницы и другие устройства, в которых используются взрывоопасные газы или сжатый воздух для перемещения тяжелой подушки вертикально вниз. Добрин и другие [1] [2] [3] описывают эти типы источников.
Взрывоопасные химические источники энергии популярны для наземных сейсмических исследований, но запрещены на некоторых участках из-за условий окружающей среды, культурных ограничений или федеральных или государственных нормативов. Химические взрывчатые вещества больше не используются в качестве морских источников энергии по экологическим и экологическим причинам.
Полевые испытания всегда следует проводить до реализации обширной программы сейсморазведки. Во-первых, следует определить, создает ли выбранный импульсный источник достаточный ввод энергии для предоставления данных с соответствующим отношением сигнал / шум и удовлетворительной шириной полосы сигнала при соответствующих расстояниях смещения. Во-вторых, важно определить, вызывает ли импульсный источник нежелательные реверберации в неглубоких слоях.
Вибраторы
Источники энергииVibroseis ™ — одни из наиболее популярных вариантов сейсмических источников для наземной разведки углеводородов.Общий термин вибратор относится к этим типам сейсмических источников. Вибраторы обладают несколькими особенностями, которые делают их привлекательными для сбора сейсмических данных. Они довольно мобильны и позволяют эффективно и оперативно освещать подземные цели из самых разных точек выстрела. Кроме того, частотный состав сигнала вибратора часто можно регулировать, чтобы лучше соответствовать требованиям разрешения, необходимым для конкретной цели. Кроме того, величина поступления энергии в Землю может быть адаптирована для оптимального соотношения сигнал-шум путем изменения размера и количества вибраторов или путем изменения выходного привода отдельных вибраторов.По этим причинам вибраторы являются одними из самых универсальных наземных источников сейсмической энергии.
Операция
Вибраторыработают по принципу введения на Землю определенной пользователем полосы частот, известной как развертка, а затем взаимной корреляции этой функции развертки с записанными данными для определения событий отражения. Параметры развертки вибратора:
- Пусковая частота
- Конечная частота
- Скорость развертки
- Длина развертки
Начальная и конечная частота
Вибратор может выполнять развертку вверх, которая начинается с частоты от 8 до 10 Гц и останавливается на высоком значении 80, 100 или 120 Гц.В качестве альтернативы вибраторы могут выполнять развертку вниз, которая начинается с высокой частоты и заканчивается низкой частотой. Большинство данных Vibroseis генерируются с восходящей разверткой.
Скорость развертки
Скорость развертки может быть линейной или нелинейной. Линейная скорость заставляет вибратор задерживаться на одинаковое время на каждой частотной составляющей. Нелинейная развертка используется для выделения более высоких частот, потому что вибратор дольше задерживается на более высоких частотах, чем на более низких частотах.
Длина развертки
Длина развертки определяет время, необходимое вибратору для пересечения диапазона частот между начальной и конечной частотами.По мере увеличения длины развертки в Землю вкладывается больше энергии, поскольку вибратор дольше задерживается на каждой частотной составляющей. Длина развертки обычно находится в диапазоне от 8 до 14 секунд.
Если развертка вибратора длится 12 секунд, то каждое событие отражения также охватывает 12 секунд в необработанных некоррелированных данных. Невозможно интерпретировать некоррелированные данные вибросейсмического сигнала, поскольку все события отражения накладываются друг на друга и отдельные отражения не могут быть распознаны. Данные приводятся к интерпретируемой форме путем взаимной корреляции известного входного сигнала развертки с необработанными данными, записанными на приемных станциях.Каждый раз, когда процесс корреляции обнаруживает репликацию входной развертки, он создает компактный симметричный вейвлет корреляции, сосредоточенный на событии длительного отражения. В этой коррелированной форме данные вибросейсмического сигнала демонстрируют высокое отношение сигнал / шум, а события отражения представляют собой надежные вейвлеты, охватывающие всего несколько десятков миллисекунд.
Оптимизация соотношения сигнал / шум
В качестве общего наблюдения, если область поражена случайным шумом, вибраторы являются отличным источником энергии, потому что процесс корреляции, используемый для уменьшения развертки вибратора до интерпретируемой формы, распознает частоты шума, которые находятся за пределами диапазона развертки источника.Если суммировать несколько разверток, неорганизованный шум в пределах диапазона развертки ослабляется. Однако, если присутствует когерентный шум с частотами в диапазоне частот развертки вибратора, то процесс корреляции может усилить эти шумовые моды. Каталожные номера: [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] ] описывает рабочие характеристики вибраторов и их способность оптимизировать отношение сигнал / шум.
Технология фиксации фазы силы земли
Вероятно, наиболее важным усовершенствованием в работе вибраторов стало развитие технологии фазовой синхронизации силы земли. [13] Применение этой технологии приводит к тому, что одна и та же функция силы грунта (т. Е. Один и тот же базовый сейсмический импульс) генерируется во время сотен последовательных разверток вибраторами, расположенными в широком диапазоне условий поверхности земли и почвы и всеми вибраторы в составе мультивибратора.Все аспекты обработки сейсмических данных выигрывают, когда источник генерирует последовательные выходные волны на протяжении всей сейсморазведки, отсюда и привлекательность вибраторов как источника выбора для большинства наземных съемок.
Источники поперечных волн
Все источники сейсмической энергии генерируют объемные волны сжатия (P) и сдвига (S). Для изучения физических и исследовательских приложений S-волн часто необходимо увеличить количество энергии S-волн в нисходящем волновом поле и создать поле сдвиговых волн с известной векторной поляризацией.Эти цели могут быть достигнуты с помощью источников, которые подают на Землю горизонтально направленные импульсы, или с помощью вибраторов, которые колеблют свои опорные плиты горизонтально, а не вертикально. В любом случае, тяжелая металлическая подушка используется для придания Земле горизонтального движения посредством зажимов на нижней стороне площадки, которые выступают в Землю. Конкретную конструкцию горизонтального поперечно-волнового вибратора можно найти в патенте, выданном Fair. [14]
Горизонтальные вибраторы также были улучшены с введением технологии фазовой синхронизации силы грунта, которая обеспечивает более согласованные сдвиговые волны от развертки до развертки, когда горизонтальные вибраторы перемещаются по перспективному объекту.Повреждение поверхности было сведено к минимуму за счет уменьшения размера шипов на нижней стороне опорной плиты так, что они делают только мелкие наземные депрессий.
Морское пневматическое оружие
Пневматические пушки в настоящее время являются основным источником энергии, используемым при морском сейсмическом профилировании. Химические взрывчатые вещества больше не используются по соображениям безопасности и из-за их неблагоприятного воздействия на морскую биологию. Современные сейсмические суда буксируют несколько групп пневматических пушек, и каждая группа иногда имеет 10 или более пневматических пушек. Размер и положение каждого пневматического пистолета в массиве спроектированы таким образом, чтобы выходной вейвлет имел:
- Минимальные колебания пузырька
- Оптимальная размах амплитуды
Рис.1 показывает карту и разрезы развертывания пневматических пушек с судна сейсмических исследований. Пневматические пушки и кабель гидрофона расположены на соответствующих боковых смещениях друг от друга с помощью рулевых лопаток. Комбинация лопастей для контроля глубины и надводных буев удерживает пневматические пушки и гидрофоны на постоянной глубине, пока они буксируются через исследуемый район.
-
Рис. 1 — Оборудование, размещенное на морском сейсмическом судне с буксируемым кабелем.
Массивы воздушных пушек приводятся в действие большими бортовыми компрессорами, которые позволяют пушкам стрелять и снижать давление (приблизительно до 2000 фунтов на квадратный дюйм) с интервалами от 8 до 10 секунд, пока судно движется по заданному курсу с постоянной скоростью.Эти частые стрельбы создают точки выстрела на регулярных расстояниях от 20 до 100 м, в зависимости от скорости лодки, вдоль линии источника. При профилировании по широкой линии судно буксирует несколько групп пневматических пушек, расположенных на расстоянии от 50 до 100 м друг от друга по бокам, чтобы создать параллельные линии истока на одном ходу судна через перспективную область ( Рис. 1 ).
На рис. 2 показаны траектории лучей, используемые при освещении геологической цели пневматическим оружием. Сейсмическая энергия, создаваемая выстрелом из пневматической пушки, распространяется вверх и вниз от массива источников.Нисходящая траектория луча создает первичное прибытие. Восходящий путь луча отражается от поверхности воды (где коэффициент отражения равен –1 для восходящей волны давления) и распространяется вниз как призрачное событие с временной задержкой. Версии с уменьшенной амплитудой первичных и фантомных событий следуют позже, когда воздушный пузырь, созданный выстрелом, колеблется и распадается. Эти три компонента объединяются, чтобы сформировать вейвлет источника пневматической пушки:
- Первичное поступление
- Прибытие призрака
- Колебания пузыря
-
Фиг.2 — Сейсмические лучевые траектории, используемые при воздушном освещении геологических целей. [15]
Эффективность параметров решетки воздушных пушек проверяется в глубоководных условиях, когда гидрофон может быть расположен на глубокой станции в дальней зоне для записи выходного вейвлета источника, как показано на Рис. 2 . Термин «дальнее поле» относится к той части пространства распространения волнового поля, которая находится на расстоянии нескольких сейсмических длин волн от источника. Это требование дальнего поля означает, что глубина гидрофона D, показанная на рис.2 — это несколько сотен метров.
Массивы пневматических пистолетов предназначены для создания максимально компактных по времени импульсов источника с минимальными колебаниями пузырьков. Компактные вейвлеты желательны, потому что такие вейвлеты имеют широкий спектр частот сигнала; желательны минимальные колебания пузырьков, чтобы спектр сигнала был как можно более гладким.
Рис. 3 показывает идеальный вейвлет источника. Вертикальной штриховой линией отмечено время прихода основной части энергии, которая проходит по первичной траектории луча (рис.2). Энергия, которая проходит по траектории призрачного луча (, рис. 2, ), прибывает с задержкой по времени, 2d / v, где v — скорость импульса давления в морской воде, а d — глубина массива воздушных пушек.
-
Рис. 3 — Основные характеристики вейвлета пневматической пушки. [15]
Призрачное событие имеет полярность, противоположную полярности первичного прихода, поскольку коэффициент отражения для восходящей волны давления на границе раздела воздух / вода равен –1.Первичный и фантомный приходы определяют размах амплитуды исходного вейвлета. События с малой амплитудой происходят в более поздние моменты вейвлета источника, потому что воздушный пузырек, создаваемый разрядом пневматической пушки, колеблется при распаде ( Рис. 3 ). Количество, размеры и относительное расстояние между пистолетами в группе определяют амплитуду этих остаточных колебаний пузырьков.
Два наиболее интересных свойства вейвлета:
- Пиковая прочность (PTP)
- Отношение первичных частиц к пузырькам (PBR)
Цели конструкции решетки пневматических пушек заключаются в том, чтобы максимизировать PTP-свойство вейвлета пневматической пушки, которое является разницей, A – B, в Рис.4 , и минимизировать параметр PBR, который представляет собой отношение (A – B) / (C – D).
-
Рис. 4 — Два важных свойства вейвлета пневматического пистолета: максимальная прочность (от A до B) и соотношение первичной и пузырьковой составляющих [(A-B) / (C-D)]. [15]
Многие факторы, такие как количество пушек в массиве, их объем и глубина, влияют на амплитуду, фазу и частотный характер вейвлета массива пневматических пушек. Таблица 1 резюмирует проведенный Dragoset [15] анализ параметров решетки пневматических пушек и их влияния на основные свойства PTP и PBR вейвлетов пневматических пушек. Ключевым моментом в этой таблице является то, что количество пушек в массиве имеет большее влияние на размах амплитуды (или энергию вейвлета), чем объем пушек.
Сейсмические датчики
Для сбора сейсмических данных используются два класса сейсмических датчиков:
- Скалярные датчики
- Векторные датчики
Скалярный датчик
Скалярный датчик измеряет величину движения Земли, вызванного сейсмическим возмущением, но не указывает направление этого движения.Гидрофон — это пример популярного скалярного датчика, используемого в сейсмической отрасли. Гидрофоны измеряют изменения давления (скалярные величины), связанные с сейсмическими возмущениями. Гидрофон не может отличить изменение давления, вызванное нисходящим волновым полем, от изменения давления, создаваемого восходящим волновым полем. Гидрофоны не предоставляют направленной (векторной) информации о распространяющемся сейсмическом событии.
Векторный датчик
Векторный датчик указывает направление, в котором сейсмическое событие заставляет Землю двигаться.Классическим примером векторного датчика является геофон с подвижной катушкой, который десятилетиями использовался для записи наземных сейсмических данных. Принцип работы геофона с подвижной катушкой заключается в том, что легкая катушка с несколькими сотнями витков тонкой медной проволоки подвешена на пружинах, которые, в свою очередь, прикреплены к корпусу геофона. Пружины предназначены для того, чтобы корпус геофона и легкая катушка могли двигаться независимо друг от друга в интересующем диапазоне частот. К корпусу геофона прикреплены постоянные магниты для создания сильного внутреннего магнитного поля.Когда корпус перемещается из-за сейсмического возмущения, создается электрическое напряжение, поскольку катушки разрезают магнитные силовые линии. Величина выходного напряжения пропорциональна количеству магнитных силовых линий, разрезаемых в единицу времени; таким образом, отклик геофона показывает скорость корпуса геофона, которая, в свою очередь, пропорциональна скорости земных частиц на геофонной станции.
Полярность выходного напряжения геофона зависит от направления движения электрических проводников, пересекающих магнитные силовые линии.Если движение вверх создает положительное напряжение, то движение вниз создает отрицательное напряжение. Таким образом, геофон — это векторный датчик, который определяет не только величину движения Земли, но и направление этого движения.
Поскольку геофоны являются датчиками направления и могут различать вертикальные и горизонтальные движения Земли, они используются для записи многокомпонентных сейсмических данных. Трехкомпонентные (3C) геофоны используются для записи сейсмических данных сжатия и сдвига на суше. Сдвиговые волны не распространяются в жидкостях.В морской среде геофоны должны находиться в непосредственном контакте с земными отложениями на морском дне, а кабели для записи данных должны быть подключены к надводным кораблям или телеметрическим буям. Четырехкомпонентные (4C) датчики, используемые для этой услуги, заключены в большие, прочные, водонепроницаемые корпуса, которые включают гидрофон и геофон 3C. На рис. 5 показан сегмент кабеля морского дна (OBC), используемого для развертывания морских сейсмических датчиков 4C. В этой конструкции кабеля сенсорная станция 4C размещается с интервалом 50 м вдоль 150-метрового участка кабеля.Большое количество этих сегментов, каждый из которых содержит по три приемные станции, соединены встык, образуя непрерывную приемную линию OBC длиной несколько километров. Точная длина приемной линии определяется глубиной отображаемой цели.
-
Рис. 5 — Отрезок кабеля дна океана с тремя сенсорными станциями 4C, расположенными на расстоянии 50 м друг от друга.
Рис. 6 показывает линию OBC, развернутую на морском дне и подключенную к стационарному судну для регистрации данных.Вторая лодка, буксирующая решетку пневматических пушек, пересекает заранее спроектированные линии истока параллельно или перпендикулярно кабелю OBC. Датчики 4C остаются неподвижными на морском дне во время записи данных, так же как и наземные геофоны при сборе наземных сейсмических данных. Датчики морского дна не буксируются, как обычные морские кабели гидрофона, показанные на рис. 1 .
-
Рис. 6 — Основные элементы сбора данных по кабелю морского дна. P обозначает сейсмическую волну сжатия; SV — это преобразованная мода сдвига.
Список литературы
- ↑ Добрин, М.Б. 1976. Введение в геофизическую разведку, 630. Нью-Йорк: McGraw-Hill Book Co.
- ↑ Телфорд, W.M. и другие. 1976. Прикладная геофизика, 860. Кембридж, Великобритания: Издательство Кембриджского университета.
- ↑ Шоле, Дж. И Паук, А. 1980. Устройство для генерации сейсмических волн путем удара массой о целевой элемент. Патент США №4205731.
- ↑ Кроуфорд, Дж. М., Доти, W.E.N., и Ли, М.Р. 1960. Сейсмограф непрерывного сигнала. Геофизика 25 (1): 95-105. http://dx.doi.org/10.1190/ 1.1438707
- ↑ Гейер, Р.Л. 1971. Оптимизация параметров вибросейса. Oil & Gas J. 68, (15): 116; и 68 (17): 114.
- ↑ Гейер Р.Л. 1970. Вибросейсмическая система сейсмического картирования. Канадский журнал разведочной геофизики 6 (1): 39.
- ↑ Seriff, A.J. и Ким, W.H. 1970. Эффект гармонических искажений при использовании источников вибрирующей поверхности. Геофизика 35 (2): 234-246. http: // dx.doi.org/10.1190/ 1.1440087
- ↑ Goupillaud, P.L. 1976. Дизайн сигналов в вибросейсмической технике. Геофизика 41 (6): 1291-1304. http://dx.doi.org/10.1190/1.1440680
- ↑ Бернхардт, Т. и Пикок, Дж. Х .: «Методы кодирования для системы вибросейсмических сигналов», Геофизическая разведка (1978) 26, 184.
- ↑ Waters, K.H. 1978. Отражательная сейсмология — инструмент для исследования энергоресурсов. Нью-Йорк: Джон Вили и сыновья.
- ↑ Cunningham, A.B. 1979. Некоторые альтернативные сигналы вибратора.Геофизика 44 (12): 1901-1921. http://dx.doi.org/10.1190/1.1440947
- ↑ Эдельманн, Х.А.К., Вернер, Х., 1982. Техника закодированной развертки для вибросейсмических сигналов. Геофизика 47 (5): 809-818. http://dx.doi.org/10.1190/ 1.1441348
- ↑ 13,0 13,1 Саллас, Дж. Дж. 1984. Управление сейсмическим вибратором и нисходящая P-волна. Геофизика 49 (6): 732-741. http://dx.doi.org/10.1190/1.1441701
- ↑ Fair, D.W. 1964. Преобразователь поперечной волны. Патент США № 3159232.
- ↑ 15,0 15,1 15,2 15,3 Dragoset, W.H. 1990. Характеристики массива пневматического оружия — Учебное пособие. Передний край 9 (1): 24-32. http://dx.doi.org/10.1190/1.1439671
Интересные статьи в OnePetro
Используйте этот раздел, чтобы перечислить статьи в OnePetro, которые читатель, желающий узнать больше, обязательно должен прочитать
Внешние ссылки
Используйте этот раздел, чтобы предоставить ссылки на соответствующие материалы на других веб-сайтах, кроме PetroWiki и OnePetro.
См. Также
Сейсмические изображения и инверсия
Распространение сейсмических волн
Сейсмические атрибуты
Скорость сжатия и сдвига
PEH: Основы_геофизики
Категория
Страница не найдена | MIT
Перейти к содержанию ↓- Образование
- Исследование
- Инновации
- Прием + помощь
- Студенческая жизнь
- Новости
- Выпускников
- О MIT
-
Подробнее ↓
- Прием + помощь
- Студенческая жизнь
- Новости
- Выпускников
- О MIT
Попробуйте поискать что-нибудь еще! Что вы ищете? Увидеть больше результатов
Предложения или отзывы?
Принцип работы индуктивного датчикаОпределения:
НЕТ (нормально разомкнутый): А переключающий выход, запрещающий разомкнуть ток, когда привод отсутствует и закрывается, позволяя текущий поток при наличии исполнительного механизма.
NC (нормально замкнутый): Релейный выход, замкнутый, позволяющий протекание тока при отсутствии привода и запрещение открывания текущий поток при наличии исполнительного механизма.
NPN Выход: транзисторный выход, который переключает общий или отрицательное напряжение на нагрузку. Нагрузка подключается между положительное питание и выход.Текущие потоки из нагрузка через выход на землю, когда выход переключателя на. Также известен как снижение тока или отрицательное переключение.
PNP Выход: транзисторный выход, который переключает положительное напряжение к нагрузке. Нагрузка подключается между выходом и общим. Ток течет от выхода устройства через нагрузку к заземление при включенном выходе переключателя.Также известен как текущий источник или положительное переключение.
Операционная Расстояние (Sn): Максимальное расстояние от датчика до квадратный кусок железа (Fe 37) толщиной 1 мм со сторонами = до диаметр чувствительной поверхности, который вызовет изменение на выходе датчика. Расстояние уменьшится для других материалы и формы. Испытания проводятся при 20ºC с источник постоянного напряжения.Это расстояние действительно включает ± Допуск изготовления 10%.
Мощность Supply: Диапазон напряжения питания, в котором будет работать датчик в.
Макс Ток переключения: Допустимая величина постоянного тока протекать через датчик, не вызывая повреждения датчика. Это максимальное значение.
мин. Ток переключения: Это минимальное значение тока, которое должен протекать через датчик, чтобы гарантировать работу.
Макс Пиковый ток: Максимальный пиковый ток указывает на максимум текущее значение, которое датчик может выдержать в течение ограниченного периода времени времени.
Остаточная Ток: Ток, протекающий через датчик при он находится в открытом состоянии.
Мощность Сток: Величина тока, необходимая для работы датчика.
Напряжение Падение: Падение напряжения на датчике при движении максимальная загрузка.
Короткий Защита цепи: Защита от повреждения датчика если нагрузка закорочена.
Операционная Частота: Максимальное количество циклов включения / выключения, которое устройство способно за одну секунду.Согласно EN 50010, этот параметр измеряется динамическим методом, показанным на Инжир. 1 с датчиком в положениях (a) и (b). S — рабочий расстояние, а м — диаметр датчика. Частота дается формулой на рис. 2.
Повторяемость (% Sn): Разница между любыми значениями рабочего расстояния Измеряется за 8 часов при температуре от 15 до 15 до 30ºC и напряжения питания с отклонением <= 5%.
Гистерезис (% Sn): Расстояние между точкой «включения» приближение исполнительного механизма и точка «выключения» привод отступает. Это расстояние снижает количество ложных срабатываний. Его значение выражается в процентах от рабочего расстояния. или расстояние. См. Рис.3
Промывка Монтаж: Для монтажа рядом с моделями скрытого монтажа см. рис.4а. Модели без скрытого монтажа можно встраивать в металл согласно рис. 4б. бок о бок см. на рис. 4c. Sn = рабочее расстояние.
Защита
Степень: Степень защиты корпуса согласно IEC
(Международная электротехническая комиссия):
IP 65: пыленепроницаемость. Защита от водяных струй.
IP 67: пыленепроницаемость. Защита от воздействия погружения
Что такое емкостный датчик?
Емкостные датчики приближения — это бесконтактные устройства, которые могут обнаруживать присутствие или отсутствие практически любого объекта, независимо от материала.Они используют электрическое свойство емкости и изменение емкости на основании изменения электрического поля вокруг активной поверхности датчика.
Емкостная сенсорная технология часто используется в других сенсорных технологиях, таких как:
- поток
- давление
- уровень жидкости
- шаг
- толщина
- Обнаружение льда
- Угол вала или линейное положение
- Диммерные переключатели
- клавишные переключатели
- x-y планшет
- акселерометры
Принцип действия
Емкостной датчик действует как простой конденсатор.Металлическая пластина на чувствительной поверхности датчика электрически соединена со схемой внутреннего генератора, и обнаруживаемая цель действует как вторая пластина конденсатора. В отличие от индуктивного датчика, который создает электромагнитное поле, емкостной датчик создает электростатическое поле.
Внешняя емкость между мишенью и внутренней пластиной датчика образует часть емкости обратной связи в цепи генератора. По мере приближения к цели датчики сталкиваются с увеличением колебаний, пока не достигнут порогового уровня и не активируют выход.
Емкостные датчики имеют возможность регулировать чувствительность или пороговый уровень генератора. Регулировку чувствительности можно выполнить с помощью потенциометра, с помощью встроенной кнопки обучения или дистанционно с помощью обучающего провода. Если у датчика нет метода настройки, то датчик необходимо физически переместить, чтобы правильно определить цель. Повышение чувствительности приводит к увеличению рабочего расстояния до цели. Значительное повышение чувствительности может привести к тому, что датчик будет подвержен влиянию температуры, влажности и грязи.
Есть две категории целей, которые емкостные датчики могут обнаруживать: первая является проводящей, а вторая — непроводящей. Проводящие цели включают металл, воду, кровь, кислоты, основания и соленую воду. Эти мишени имеют большую емкость, и их диэлектрическая прочность не имеет значения. В отличие от индуктивного датчика приближения, коэффициенты уменьшения для различных металлов не влияют на расстояние срабатывания датчиков.
Непроводящая целевая категория действует как изолятор для электрода датчика.Диэлектрическая проницаемость объекта, также иногда называемая диэлектрической постоянной, является мерой изоляционных свойств, используемых для определения коэффициента уменьшения расстояния срабатывания. Твердые и жидкие вещества имеют диэлектрическую постоянную больше, чем вакуум (1.00000) или воздух (1.00059). Материалы с высокой диэлектрической проницаемостью будут иметь большее расстояние срабатывания. Поэтому материалы с высоким содержанием воды, например дерево, зерно, грязь и бумага, будут влиять на расстояние срабатывания.
При работе с непроводящими целями расстояние срабатывания определяется тремя факторами.
- Размер активной поверхности датчика — чем больше чувствительная поверхность, тем больше расстояние срабатывания
- Емкостные свойства материала целевого объекта, также называемые диэлектрической постоянной — чем выше постоянная, тем больше расстояние срабатывания
- Площадь поверхности обнаруживаемого объекта — чем больше площадь поверхности, тем больше расстояние обнаружения
Другие факторы, которые минимально влияют на расстояние срабатывания
- Температура
- Скорость целевого объекта
Дальность срабатывания
Максимальное опубликованное расстояние срабатывания емкостного датчика основано на стандартной цели, которая представляет собой заземленную квадратную металлическую пластину (Fe 360) толщиной 1 мм.Стандартная цель должна иметь длину стороны, которая равна диаметру зарегистрированной окружности чувствительной поверхности или в три раза больше номинального расстояния обнаружения, если расстояние обнаружения больше диаметра. Обнаруживаемые объекты, не являющиеся металлическими, будут иметь коэффициент уменьшения, основанный на диэлектрической проницаемости материала этого объекта. Этот коэффициент уменьшения необходимо измерить, чтобы определить фактическое расстояние срабатывания, однако есть несколько таблиц, в которых приведено приблизительное значение коэффициента уменьшения.
Номинальное или номинальное расстояние срабатывания S n — это теоретическое значение, которое не учитывает производственные допуски, рабочие температуры и напряжения питания. Обычно это расстояние срабатывания, указанное в каталогах различных производителей и рекламных материалах.
Эффективное расстояние срабатывания S r — это расстояние срабатывания датчика, измеренное в определенных условиях, таких как скрытый монтаж, номинальное рабочее напряжение U e , температура T a = 23 ° C +/- 5 ° C.Эффективный диапазон срабатывания емкостных датчиков можно отрегулировать с помощью потенциометра, кнопки обучения или провода дистанционного обучения.
Гистерезис
Гистерезис — это разница в расстоянии между включением, когда цель приближается к чувствительной поверхности, и точкой выключения, когда цель удаляется от чувствительной поверхности. Гистерезис разработан в датчиках для предотвращения дребезга выхода, если цель была расположена в точке переключения.
Гистерезис указан в% от номинального расстояния срабатывания.Например, датчик с номинальным расстоянием срабатывания 20 мм может иметь максимальный гистерезис 15% или 3 мм. Гистерезис — это независимый параметр, который не является постоянным и будет варьироваться от датчика к датчику. Есть несколько факторов, которые могут повлиять на гистерезис, включая:
- Датчик температуры окружающей среды и тепла, выделяемого датчиком, на который подается питание
- Атмосферное давление
- Относительная влажность
- Механические нагрузки на корпус датчика
- Электронные компоненты, используемые на печатной плате в датчике
- В зависимости от чувствительности — более высокая чувствительность связана с более высоким номинальным расстоянием срабатывания и большим гистерезисом
Как определить чувствительность емкостного датчика
Емкостные датчики имеют потенциометр или какой-либо метод для установки чувствительности датчика для конкретного приложения.В случае потенциометра количество оборотов не дает точного индикатора настройки датчиков по нескольким важным причинам. Во-первых, у большинства потенциометров нет жестких упоров, вместо этого у них есть муфты, чтобы не повредить горшок при установке на полную минимальную или максимальную настройку. Во-вторых, горшки не имеют постоянной линейности.
Для определения чувствительности емкостного датчика расстояние срабатывания измеряется от заземленной металлической пластины с помощью микрометра.Пластина заземлена на минус источника питания, а цель перемещается в осевом направлении к лицевой стороне датчика. Переместите цель за пределы диапазона обнаружения, а затем переместите ее к лицевой стороне датчика. Прекратите продвижение цели, как только активируется выход. Это расстояние — это расстояние срабатывания датчика. Перемещение цели и наблюдение за отключением выхода обеспечит гистерезис датчика.
Чтобы узнать больше о технологии емкостных датчиков, посетите сайт www.balluff.com.
Как это:
Нравится Загрузка …
Джек Моэрмонд
Джек Моэрмонд имеет более чем 41-летний опыт работы в сфере производства и автоматизации. В его обязанности входили инженер по контролю, системный специалист, менеджер системного отдела и менеджер по продукции. Его опыт работы с продуктами охватывает датчики, ПЛК и приводы, сталелитейную и бумажную промышленность, упаковку, производство продуктов питания и напитков, полупродукцию и науки о жизни. Помимо своих ролей в различных поставщиках средств автоматизации, Джек преподавал программирование ПЛК и различные другие учебные курсы по устройствам автоматизации.
Вихретоковый датчик: принцип действия и применение
Вихретоковые датчики в основном используются для измерения смещения и положения электропроводных целей. Обычно они используются для измерения ферромагнитных и неферромагнитных материалов. Они подходят для применения в суровых промышленных условиях благодаря своей превосходной устойчивости к маслам, грязи, пыли, влаге и полям магнитных помех. Доступны в миниатюрных и субминиатюрных моделях, они также могут использоваться для измерения в ограниченном пространстве.Как работает вихретоковый датчик?
Принцип действия вихретокового датчика
Рис.1 Принципиальная схема вихретокового действияВихретоковый датчик работает по индуктивному вихретоковому принципу. Он измеряет расстояние на основе извлечения энергии из колебательного контура, которая требуется для генерации вихревого тока в электропроводящих материалах.
Когда на чувствительную катушку подается переменный ток, вокруг катушки формируется магнитное поле.Если в это поле поместить электропроводящий материал, то в соответствии с законом индукции Фарадея индуцируется поле вихревых токов. Когда объект движется, это вызывает изменение импеданса катушки, которое пропорционально изменению расстояния между датчиком и целью.
Преимущества вихретокового датчика
Вихретоковые датчики обладают превосходной температурной стабильностью и устойчивостью к давлению, температуре, грязи и маслу. Они способны работать при давлении до 4000 бар и являются одними из лучших неизнашиваемых бесконтактных датчиков для измерения перемещения и положения в суровых промышленных условиях.
Датчики также могут измерять с высокой скоростью до 100 кг образцов в секунду. Головку датчика также можно настроить в соответствии с конкретными запросами клиентов, чтобы она соответствовала различным приложениям. Датчики, как правило, имеют миниатюрный размер и поэтому подходят для измерения в местах с ограниченным доступом. Эти датчики также недороги и могут использоваться в массовых OEM-приложениях.
Возможные области применения вихретокового датчика
Благодаря своей устойчивости и устойчивости к измерениям в экстремальных условиях, вихретоковые датчики используются в широком спектре промышленных приложений.Некоторые примеры включают:
- Измерение вибрации приводов на заводах по цинкованию стали
- Движение цилиндров в двигателе внутреннего сгорания
- Измерение толщины листового металла в зазоре роликов
- Измерьте перемещение гидроцилиндров
- Используется в самолетах для измерения движения переключателей дверных замков и закрылков шасси
Чтобы просмотреть полный спектр наших вихретоковых датчиков, посетите эту страницу.
Технология парамагнитных ячеек для нашего парамагнитного анализатора O2
Кислород — парамагнитный газ, который притягивается сильным магнитным полем.Поскольку это измерение является чисто физическим эффектом, ничего не потребляется, и в принципе клетка имеет неограниченный срок службы. Однако загрязнение ячейки пылью, грязью, коррозионными веществами или растворителями может привести к порче. Диапазон измерения обычно составляет от 0,05% до 100% O 2 .
Теория
Принцип действия парамагнитного датчика заключается в парамагнитной восприимчивости молекулы кислорода — физическом свойстве, которое отличает кислород от большинства других газов.
Датчик состоит из двух наполненных азотом стеклянных сфер, установленных на вращающейся подвеске. Эта сборка подвешена в сильном магнитном поле. Кислород в окружающем газе притягивается к магнитному полю, в результате чего на стеклянные сферы действует сила. Сила крутящего момента, действующего на подвеску, пропорциональна содержанию кислорода в окружающих газах.
Рисунок 1: Парамагнитный элемент
Принцип работы
См. Рисунок 1 выше.Измерительная система является «нулевой». Сначала «нулевое» положение узла подвески, измеренное в азоте, определяется фотодатчиком, который принимает свет, отраженный от зеркала, прикрепленного к узлу подвески. Выходной сигнал фотодатчика подается обратно на катушку вокруг узла подвески. Эта обратная связь позволяет достичь двух целей.
Во-первых, когда кислород вводится в ячейку, крутящий момент, действующий на узел подвески, уравновешивается восстанавливающимся крутящим моментом из-за тока обратной связи в катушке.Ток обратной связи прямо пропорционален объемной магнитной восприимчивости пробы газа и, следовательно, после калибровки парциальному давлению кислорода в пробе. Таким образом, ток дает точное измерение концентрации кислорода в газовой смеси.
Во-вторых, электромагнитная обратная связь «делает» подвеску жесткой, сильно демпфируя ее и увеличивая собственную частоту, делая подвеску устойчивой к ударам.
Калибровка
Поскольку в приборе используется абсолютный принцип измерения, после сборки и калибровки на заводе дальнейшая заводская калибровка не требуется.
Заводская калибровка состоит из калибровки электроники для приема входного сигнала от ячейки детектирования и проверки правильности считывания прибора в воздухе, 20,9%. Затем прибор проверяется на правильность показаний при 100% содержании кислорода.
Приложения
Парамагнитный анализатор o2 может использоваться для измерения кислорода на любом уровне от 0 до 100% в газах или газовых смесях.
Анализаторы кислорода Systech Illinois PM700 предоставляют выбираемые пользователем диапазоны: 0–2%, 0–10%, 0–30%, 0–100%, 98–100% и 20–22%.При измерениях чистоты кислорода в диапазоне 98-100% необходимо использовать регулятор абсолютного давления на выходе.
Мешающие эффекты
Некоторые другие газы также являются парамагнитными, и их присутствие в потоке газа может вызвать ложные показания. В большинстве случаев эффект относительно невелик. В таблице ниже показан парамагнитный эффект фоновых газов при температуре 20 o C в 100% концентрации:
| Мешающий газ | Эффект интерференции |
| (100% помехи) | (% 02) |
| N20 | -0.20 |
| CO2 | -0,26 |
| h3O | -0,03 |
| Галотан | -1,93 |
| Изофлуран | -1,97 |
| энфлуран | -1,97 |
| Десфлуран | -2,10 |
| Севофлуран | -2,90 |
| Хлороформ | -1,37 |
| Гелий | 0.29 |
| НЕТ | 42,56 |
| НО2 | 5,00 |
PM700 используется производителями промышленного газа, промышленными потребителями газа и для контроля безопасности.
| Заявка | Использует |
|
Производители газа |
за обеспечение качества продукции; контроль чистоты кислорода или измерение примеси кислорода. |
|
Пользователи газа |
или обеспечение качества продукции |
|
Пищевая упаковка |
, чтобы обеспечить наличие достаточного количества кислорода в рабочей атмосфере, где в атмосфере может возникнуть дефицит кислорода. |
.
