Как создать робота в домашних условиях. Какие материалы потребуются для сборки простого робота. Какие существуют виды самодельных роботов. Как запрограммировать робота на выполнение простых действий.
Необходимые материалы и компоненты для создания простого робота
Для сборки базовой модели робота в домашних условиях потребуются следующие компоненты:
- Микроконтроллер (например, Arduino Uno или Raspberry Pi)
- Моторы постоянного тока (2-4 шт.)
- Драйвер двигателей (L293D или аналог)
- Колеса (2-4 шт.)
- Датчики (фоторезисторы, ультразвуковой дальномер и т.п.)
- Корпус (пластиковый контейнер или самодельный из картона)
- Аккумулятор или батарейный отсек
- Провода, резисторы, кнопки
Также понадобятся инструменты: паяльник, отвертки, плоскогубцы, мультиметр. Стоимость базового набора компонентов составит около 2000-3000 рублей.
Пошаговая инструкция по сборке простейшего робота
Рассмотрим основные этапы создания простого робота на базе Arduino:
- Собрать шасси — закрепить моторы и колеса на корпусе
- Подключить драйвер двигателей к Arduino и моторам
- Установить датчики (например, ультразвуковой дальномер)
- Соединить все компоненты проводами согласно схеме
- Загрузить скетч для управления роботом в Arduino
- Настроить и протестировать работу всех узлов
Сборка механической части займет 2-3 часа, еще столько же уйдет на электронику и программирование. В результате получится простой робот, способный двигаться и объезжать препятствия.
Виды самодельных роботов для начинающих
Для новичков в робототехнике подойдут следующие варианты несложных роботов:
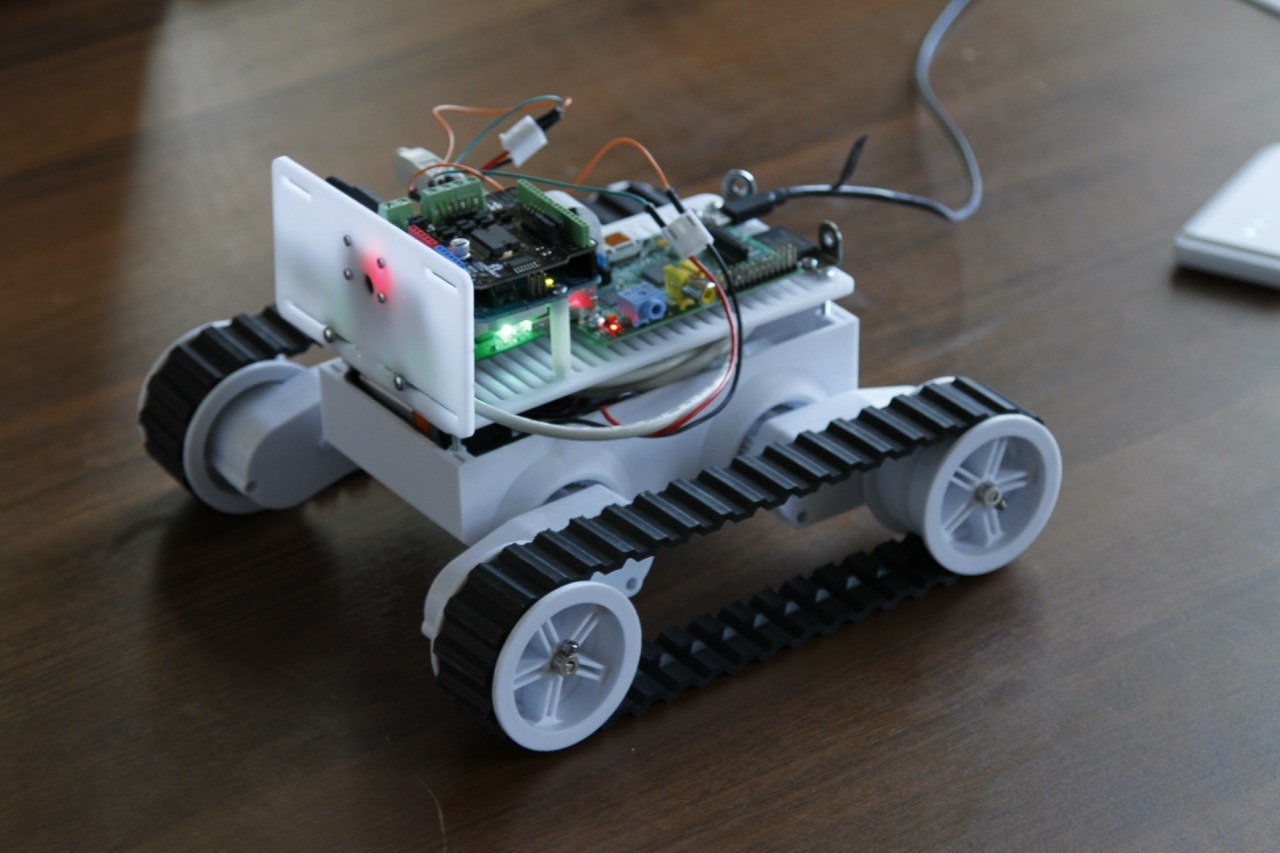
- Робот-тележка на двух или четырех колесах
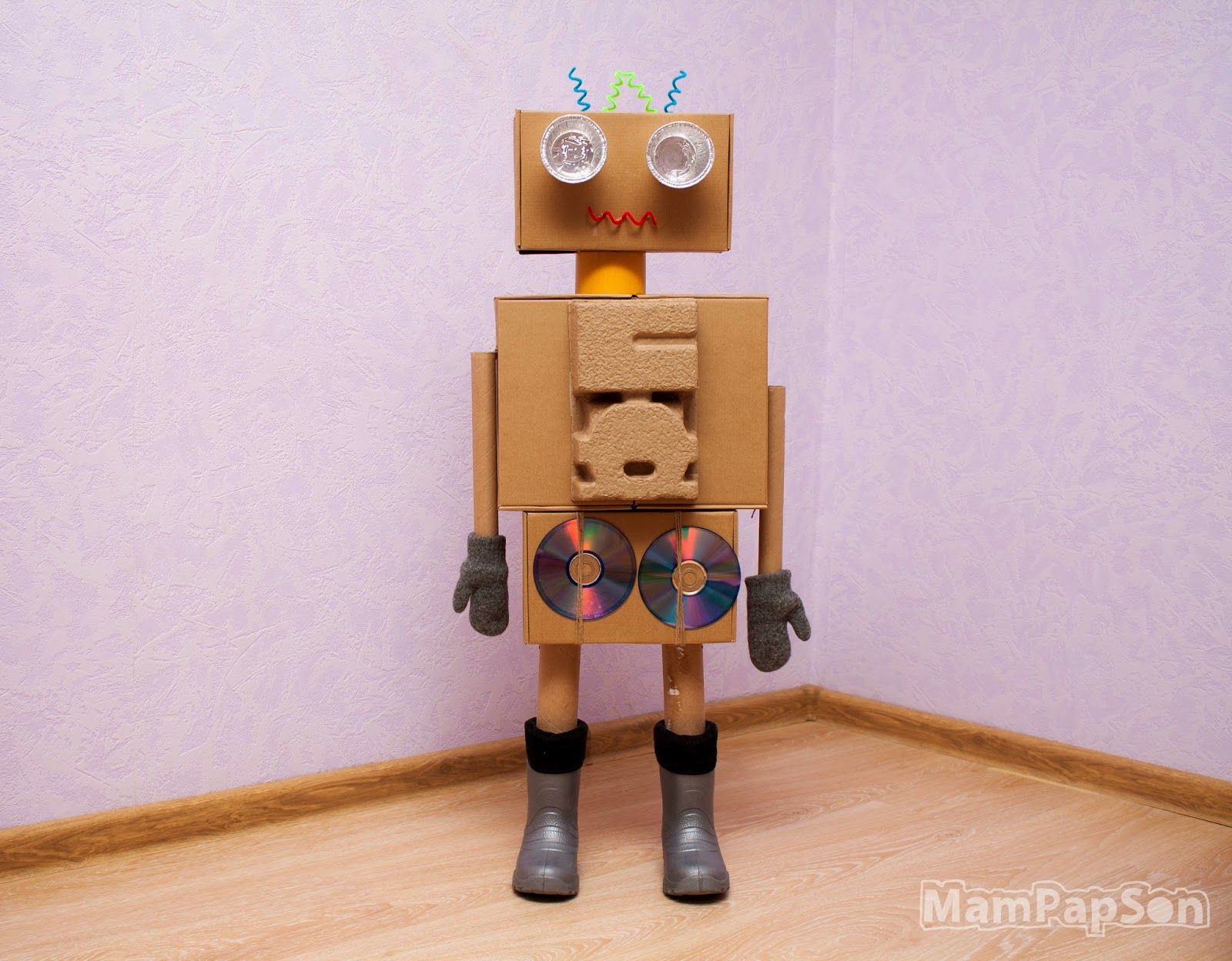
- Робот-манипулятор из картона
- Шагающий робот на сервоприводах
- Робот, следующий по линии
- Робот-сумоист для соревнований
Начать лучше с простой двухколесной платформы, постепенно усложняя конструкцию и добавляя новые функции. Это позволит освоить основы механики, электроники и программирования роботов.
Программирование базовых действий робота
Чтобы запрограммировать простейшие действия робота на Arduino, потребуется написать скетч на языке C++. Вот пример кода для движения вперед-назад:

void setup() {
pinMode(5, OUTPUT); // Левый мотор
pinMode(6, OUTPUT); // Правый мотор
}
void loop() {
// Движение вперед
digitalWrite(5, HIGH);
digitalWrite(6, HIGH);
delay(2000);
// Остановка
digitalWrite(5, LOW);
digitalWrite(6, LOW);
delay(1000);
// Движение назад
digitalWrite(5, LOW);
digitalWrite(6, LOW);
delay(2000);
}
Этот базовый код заставит робота двигаться вперед 2 секунды, затем остановиться на 1 секунду и двигаться назад 2 секунды. Цикл будет повторяться бесконечно.
Добавление датчиков и усложнение функционала робота
Чтобы сделать робота более «умным», можно добавить различные датчики:
- Ультразвуковой дальномер для определения расстояния до препятствий
- Инфракрасные датчики для следования по линии
- Фоторезисторы для реакции на свет
- Датчик температуры и влажности
- Акселерометр для определения положения в пространстве
Подключив датчики, нужно дополнить программу кодом для считывания их показаний и реакции робота. Например, можно научить робота объезжать препятствия или двигаться на источник света.
Создание корпуса и внешнего вида робота
Корпус робота можно изготовить из различных материалов:
- Пластиковые контейнеры
- Плотный картон
- Фанера
- 3D-печать деталей
- Конструктор LEGO
При разработке дизайна важно учесть расположение всех компонентов, доступ к ним для обслуживания, вентиляцию. Можно добавить декоративные элементы — «глаза», «руки» и т.п. Главное — надежно закрепить электронику и защитить ее от повреждений.
Возможные проблемы при создании робота и их решение
При сборке робота новички часто сталкиваются с такими проблемами:
- Ошибки в подключении проводов — внимательно сверяйтесь со схемой
- Разрядка батарей — используйте качественные аккумуляторы
- Перегрев моторов — добавьте систему охлаждения
- Ошибки в коде — отлаживайте программу поэтапно
- Неустойчивость конструкции — укрепите основание, добавьте противовес
Большинство проблем решается путем внимательной проверки всех соединений, измерения напряжений и тока, поэтапного тестирования отдельных узлов робота.
Перспективы развития проекта самодельного робота
Создав базовую модель, можно постепенно совершенствовать робота:

- Добавить новые датчики и функции
- Установить камеру для распознавания образов
- Подключить модуль Wi-Fi для удаленного управления
- Реализовать голосовое управление
- Добавить манипулятор для захвата предметов
Развивая проект, можно освоить более сложные технологии — машинное обучение, компьютерное зрение, построение 3D-карты окружения. Это позволит создать по-настоящему автономного и интеллектуального робота.
Делаем самого простого робота своими руками
Сделать самый простой робот под силу даже тем, кто только взял в руки паяльник.
Преимущественно наш робот (в зависимости от конструкции) будет бегать на свет либо наоборот убегать от него, бежать вперед в поисках луча света или же пятиться как крот назад.
Для нашего будущего «искусственного интеллекта» понадобятся:
- Микросхема L293D
- Маленький электромотор М1 (его можно вытащить из игрушечных автомобилей)
- Фототранзистор и резистор с номиналом 200 Ом.
- Провода, батарейка и, конечно же, сама платформа, где это все будет размещаться.
Если в конструкцию добавить еще парочку ярких светодиодов, то легко можно добиться, того, что робот просто будет бегать за рукой или даже следовать по светлой или темной линии. Наше создание будет типичным представителем роботов класса BEAM. Принцип поведения таких роботов заключается на «фоторецепции», то есть свет, в данном случае, будет выступать в качестве источника информации.
Наш робот будет двигаться вперед, при попадании на него луча света. Такое поведение устройства называется «фотокинезисом» – ненаправленное увеличение или уменьшение подвижности в ответ на изменение уровня освещенности.
В нашем устройстве, как было сказано выше, использовался фототранзистор n-p-n структуры – PTR-1 в качестве фотосенсора. Здесь можно использовать не только фототранзистор, но и фоторезистор или фотодиод, так как принцип работы у всех элементов одинаковый.
На рисунке сразу приведена монтажная схема робота. Если Вы еще не достаточно хорошо знакомы с техническими условными обозначениями, то, здесь исходя из этой схемы, несложно будет понять принципы обозначения и подсоединения элементов друг к другу.
GND. Провода, соединяющие различные элементы схемы с «землей» (отрицательный полюс источника питания), обычно на схемах не отображают полностью. Вместо этого рисуют маленькую черточку, обозначающую соединение с «землей». Иногда, рядом с черточкой пишут «GND» – от анг. слова «ground» – земля.
Иногда, рядом с черточкой пишут «GND» – от анг. слова «ground» – земля.
Vcc. Данное обозначение показывает, что через эту часть схема соединена с источником питания – Положительный полюс! Иногда на схемах вместо этих букв часто пишут номинал тока. В данном случае +5V.
Принцип действия робота.
При попадании на фототранзистор (на схеме он указан как PRT1) луча света, на выходе микросхемы INPUT1 появляется положительный сигнал, который заставляет мотор М1 – работать. И наоборот, когда луч света перестает освещать фототранзистор – сигнал на выходе микросхемы INPUT1 исчезает, следовательно, и мотор останавливается.
Резистор R1 в данной схеме предназначен компенсации, проходящего тока через фототранзистор. Номинал резистора 200 Ом – конечно можно сюда припаять резисторы и с другими показателями номиналов, но следует помнить, что от номинала будет зависеть чувствительность фототранзистора, а значит и работоспособность самого робота.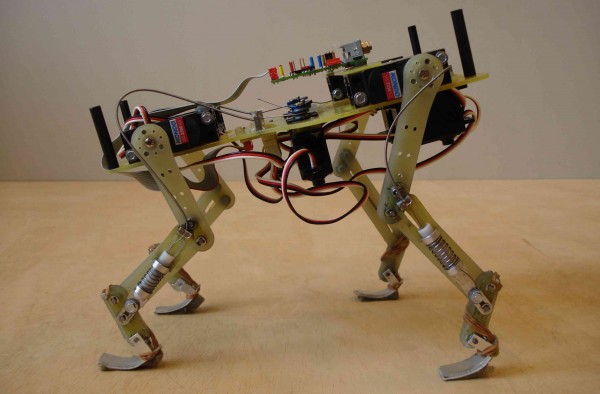
Если номинал резистора будет большим, то робот станет реагировать только на очень яркий луч света, а если небольшим – то и чувствительность будет намного выше.
Коротко говоря – не следует использовать в данной схеме резисторы с сопротивлением менее 100 Ом, иначе фототранзистор может просто-напросто перегреться и выйти из строя.
В общем, пища для размышления вам дана. Обратите внимание на схему самой микросхемы. Здесь четко изображены все входы и выходы сигналов. Комбинируя способы подключения моторчика и фоторезистора, вы легко можете изменять поведение этого робота. Более подробно о роботах можно узнать у нашего друга modelist-konstruktor.com
Как сделать робота своими руками в домашних условиях?
Компания Google осуществила детскую мечту многих людей и создала конструктор, из которого можно самостоятельно собрать робота. Причем речь идет не о безделушке с мотором и парой лампочек, потому что при должном старании конструктор будет обладать чем-то вроде искусственного интеллекта. Корпус робота можно сделать из бумаги, причем схема доступна бесплатно и ее нужно просто распечатать, вырезать и собрать. На начальном этапе программировать тоже не нужно, потому что исходный код тоже можно скачать. Правда для робота нужно будет купить «мозг» и специальное устройство, чтобы он мог обучаться новым командам. Выглядит так, что сборка робота займет много времени, но компания позиционирует свой конструктор как нечто простое и быстрое в освоении. Давайте изучим новую идею Google и выясним, насколько это правда?
Корпус робота можно сделать из бумаги, причем схема доступна бесплатно и ее нужно просто распечатать, вырезать и собрать. На начальном этапе программировать тоже не нужно, потому что исходный код тоже можно скачать. Правда для робота нужно будет купить «мозг» и специальное устройство, чтобы он мог обучаться новым командам. Выглядит так, что сборка робота займет много времени, но компания позиционирует свой конструктор как нечто простое и быстрое в освоении. Давайте изучим новую идею Google и выясним, насколько это правда?
Робот ALTO, которого можно собрать самому
Робот с искусственным интеллектом своими руками
Конструктор был представлен подразделением Google Creative Lab. Робот называется ALTO, что является сокращением от «A Little Teachable Object» (маленький обучаемый объект). Проект создан для того, чтобы люди смогли собрать робота на дому и получили базовые знания о машинном обучении. Машинным обучением называется умение искусственного интеллекта самостоятельно вырабатывать навыки выполнения новых задач. В ходе сборки робота ALTO, люди должны понять, как научить робота самостоятельно понимать и выполнять задачи. По крайней мере, компания Google на это надеется.
В ходе сборки робота ALTO, люди должны понять, как научить робота самостоятельно понимать и выполнять задачи. По крайней мере, компания Google на это надеется.
Интересный факт: ученые уверены, что в будущем большую часть ручного труда будут выполнять роботы. Чтобы не остаться без работы, людям необходимо уже сейчас изучать программирование, ведь роботами должен кто-то управлять. Так что знать, что такое машинное обучение и как оно работает, важно всем. И робот ALTO, возможно, сможет быстро ознакомить людей с этой темой.
Схема для создания корпуса робота из бумаги и исходный код программы для его работы можно найти на сайте Experiments with Google (кнопка Get the code). Но это еще не все, потому что для создания робота нужна электроника, которую нужно купить:
- Coral USB Accelerator — это устройство, которое включает в себя процессор Edge TPU. Он нужен для того, чтобы робот обладал способностью к машинному обучению.
 Его можно купить на Aliexpress;
Его можно купить на Aliexpress; - Raspberry Pi 4 — небольшой компьютер размером с банковскую карту. К нему можно будет подключить камеру, динамики и прочее оборудование, нужное для робота. Он тоже есть на Aliexpress.
Coral USB Accelerator и Raspberry Pi 4
Знаете ли вы, что роботов можно создавать даже изо льда? Посмотреть на такого робота можно по этой ссылке.
Программирование робота
Для обучения робота нужно будет использовать платформу TensorFlow, которая включает в себя инструменты для тренировки нейронных сетей (можно сказать, для создания искусственного интеллекта). Звучит сложно, да и цена устройства Coral USB Accelerator и компьютера Raspberry Pi 4 может озадачить. Но ведь речь идет о достаточно серьезном устройстве, в ходе создания которого человек получает навыки, которые могут пригодиться ему в высокотехнологичном будущем. Знание английского тоже обязательно, потому что инструкция по сборке робота ALTO и его настройке выложены на GitHub и не переведены на русский.
Робот ALTO может распознавать предметы и многое другое — главное, научить его этому
Представители Google считают, что робота можно научить выполнению самых разных задач. Самая простая из них — распознавание предметов. Если перед камерой робота поставить яблоко, он может поднять левую руку. А если поставить банан — правую. Это только самые банальные примеры, а на деле, полученные в ходе сборки робота знания, должны помочь в создании более навороченных устройств. Глядишь, кто-нибудь сможет даже разработать собственный робот-пылесос или создать охранную систему с распознаванием лиц.
Если вам интересны новости науки и технологий, подпишитесь на наш канал в Яндекс.Дзен. Там вы найдете материалы, которые не были опубликованы на сайте!
Многие люди ассоциируют будущее именно с роботами. Считается, что когда-нибудь они смогут ходить по улицам наравне с людьми и это будет вполне привычным явлением. На данный момент на улицах можно встретить разве что роботов-курьеров, и то редко. Одного из самых интересных роботов для доставки посылок недавно представила компания Hyundai. Он стал очень обсуждаемым — в чем заключается его главная особенность, можно почитать в этом материале.
Одного из самых интересных роботов для доставки посылок недавно представила компания Hyundai. Он стал очень обсуждаемым — в чем заключается его главная особенность, можно почитать в этом материале.
Искусственный интеллектМашинное обучениеРобототехникаТехнологии Google
Для отправки комментария вы должны или
Рука робота «сделай сам» — Музей науки Буффало
Перейти к основному содержаниюЗакрыть поиск
Просмотреть все задания
Рука робота «Сделай сам»
Развлекайтесь наукой всей семьей! Выполняйте задания под присмотром родителей.
Материалы:
- Плотная бумага или тонкий картон (хорошо подойдут коробки из-под хлопьев, крекеров или салфеток)
- Пряжа или толстая нить
- 5 больших бусин (например, пластиковые бусины пони)
- 2 соломинки
- Ножницы
- Лента
- Карандаш
Процедура
1. Обведите руку на картоне и вырежьте ее.
2. Нарежьте соломинки на 1-дюймовые кусочки (или 1/2 дюйма, если у вас маленькая рука!).
3. С помощью скотча прикрепите кусочки соломинки к руке (см. верхнее изображение).
4. Сложите картон между соломинками — это будет имитировать ваши суставы (см. красные линии на верхнем изображении).
5. Отрежьте пять отрезков пряжи длиной 12 дюймов и привяжите к концу каждого по бусине.
6. Проденьте каждый кусок пряжи через кусочки соломинки, начиная с кончиков пальцев и заканчивая ладонью. Каждый палец должен управляться одной струной.
7. Используйте струны вместе или по отдельности, чтобы управлять движением каждого из пальцев. Поздравляю с новой рукой-роботом!
8. Обязательно сделайте снимок, чтобы поделиться им в комментариях на Facebook на страницах Музея науки Буффало или заповедника Тиффт!
О чем все это?
Что заставляет нас двигаться? Как мы прыгаем, плывем, пожимаем плечами, мчимся или растягиваемся? Внутри нашего тела постоянно происходит множество различных действий.
Знаете ли вы, что не все эти движения выполняются только мышцами? Наши пальцы необычны тем, что в них нет мышц! Они опираются на ряд тонких, прочных волокон, называемых сухожилиями, которые соединяют кости наших пальцев с мышцами рук.
Натяжение струн на вашей руке робота действует подобно сухожилиям в нашей руке, которые тянут наши кости в результате сгибания мышц руки. Когда мы отпускаем струну, пальцы снова становятся плоскими, как будто освобождается сухожилие.
Попробуй!
Ты видишь сухожилия в своих руках? Попробуйте сделать свою руку похожей на фото справа. Это кости или сухожилия, которые вы видите? Откуда вы знаете?
Возьмите правое предплечье левой рукой. Сожмите кулак, вытяните ладонь, пошевелите пальцами — что вы чувствуете? Почему?
Где еще могут быть сухожилия? Все ли сухожилия делают одно и то же?
Другие мероприятия на большой виртуальной научной ярмарке
-
Мини-гольф своими руками
Хотите верьте, хотите нет, но мини-гольф основан на математике и физике.
 Стреляйте в одну дырку в этой виртуальной научной ярмарке! Открыть активность
Стреляйте в одну дырку в этой виртуальной научной ярмарке! Открыть активность
Закрыть меню
Упражнение STEAM «Сделай сам» робота
Пробудите воображение учащихся, создав руки робота «Сделай сам» из бумаги, соломинок и веревки с помощью этого практического учебного задания от Простой ПАР . Дети будут оттачивать свои инженерные навыки и навыки творческого мышления в этой увлекательной игре STEAM!
Что такое рука робота «сделай сам»?
Рука робота «Сделай сам» — это простое и изобретательное инженерное занятие, которое научит детей всему миру робототехники! С помощью всего трех обычных предметов — соломинки, бумаги и веревки — ученики могут создать подвижную сгибаемую руку. Это занятие поощряет изучение робототехники, инженерии и творческого мышления, что делает его идеальным занятием STEAM для учащихся.
Как эта деятельность связана с обучением STEAM?
Мастер-класс «Сделай сам» STEAM — прекрасный пример взаимосвязи искусства и технологии. Эта деятельность не только поощряет инженерные исследования и научные исследования в области робототехники, но также требует от учащихся творческого подхода к проектированию и созданию собственной роботизированной руки.
Эта деятельность не только поощряет инженерные исследования и научные исследования в области робототехники, но также требует от учащихся творческого подхода к проектированию и созданию собственной роботизированной руки.
Почему важно сосредоточиться на обучении STEAM в дошкольном образовании?
Важно поощрять участие учащихся как в искусстве, так и в технологиях. Упражнение DIY Robot Hand STEAM сочетает в себе лучшие аспекты обеих областей, предлагая учащимся спроектировать и создать чудо инженерной мысли. Артистизм и дизайн имеют решающее значение для развития научных технологий, особенно в области робототехники. Включение искусства в области STEM создает более доступный и динамичный взгляд на технологический сектор.
Как учителя могут включить это занятие в класс как часть урока?
Упражнение STEAM «Рука робота своими руками» побуждает учащихся задуматься о том, как функционирует человеческое тело, о робототехнике в реальном мире и об элементах дизайна.
Загрузите наш БЕСПЛАТНО для печати ниже!
Необходимые материалы:
- Стандартные трубочки для питья (бумажные или пластиковые)
- Большие соломинки (соломинки для смузи — бумажные или пластиковые)
- Белая карточка
- Ножницы
- Карандаши
- Пряжа или нить (разных цветов)
- Лента
1Создание руки робота
Обведите руку (для большего размера рекомендуется взрослая рука) на картоне. Вырежьте контур руки ножницами. Положите руку обратно на бумажную руку, чтобы отметить расположение суставов. Сложите бумажную руку в отмеченных местах соединения.
2 Добавить соломинки
Нарежьте стандартные соломинки размером ¼», ½», 1″ и 2 ¼».
