Как работает регулятор оборотов коллекторного двигателя. Какие бывают схемы регуляторов. Как выбрать оптимальный регулятор для коллекторного двигателя. Как сделать простой регулятор своими руками.
Принцип работы регулятора оборотов коллекторного двигателя
Регулятор оборотов коллекторного двигателя позволяет плавно изменять скорость вращения вала в широком диапазоне. Основной принцип работы заключается в изменении напряжения, подаваемого на обмотки двигателя.
Существует несколько способов регулирования скорости коллекторного двигателя:
- Изменение напряжения питания с помощью реостата или потенциометра
- Широтно-импульсная модуляция (ШИМ) напряжения питания
- Использование тиристорных или симисторных схем
- Применение специализированных микросхем-драйверов
Наиболее эффективным является метод широтно-импульсной модуляции, позволяющий регулировать обороты практически без потерь мощности.
Основные типы регуляторов оборотов
По принципу действия регуляторы оборотов коллекторных двигателей можно разделить на несколько типов:
Реостатные регуляторы
Простейший тип регулятора, в котором изменение напряжения происходит за счет падения напряжения на переменном резисторе. Недостатки — большие потери мощности и нагрев резистора.
Тиристорные и симисторные регуляторы
Работают по принципу фазового управления, изменяя угол открытия силового ключа. Позволяют плавно регулировать обороты, но имеют недостатки в виде помех и низкого КПД на малых оборотах.
ШИМ-регуляторы
Наиболее эффективный тип регуляторов. Принцип работы основан на быстром переключении питания двигателя. Позволяют регулировать обороты в широком диапазоне с высоким КПД.
Схемы простых регуляторов оборотов
Рассмотрим несколько схем простых регуляторов оборотов, которые можно собрать своими руками:
Регулятор на микросхеме TDA1085
Одна из самых популярных схем для управления коллекторными двигателями. Основные особенности:
- Плавная регулировка оборотов от 0 до максимума
- Поддержание постоянного момента на валу
- Защита от перегрузки по току
- Плавный пуск и торможение двигателя
Схема включения микросхемы TDA1085 относительно проста и содержит минимум внешних компонентов.

ШИМ-регулятор на микроконтроллере
Позволяет реализовать более гибкое управление двигателем за счет программирования микроконтроллера. Преимущества:
- Широкий диапазон регулирования
- Возможность реализации различных алгоритмов управления
- Дополнительные функции защиты и диагностики
Для сборки потребуется микроконтроллер (например, ATmega328) и силовой ключ на MOSFET-транзисторе.
Особенности выбора регулятора оборотов
При выборе или разработке регулятора оборотов для коллекторного двигателя следует учитывать несколько важных факторов:
- Мощность двигателя
- Требуемый диапазон регулирования скорости
- Необходимость поддержания момента на малых оборотах
- Условия эксплуатации (температура, влажность и т.д.)
- Требования по электромагнитной совместимости
Для маломощных двигателей (до 100 Вт) подойдут простые схемы на основе ШИМ-контроллеров. Для более мощных моторов рекомендуется использовать специализированные драйверы или микроконтроллерные системы управления.
Изготовление регулятора оборотов своими руками
Собрать простой регулятор оборотов коллекторного двигателя можно самостоятельно. Для этого потребуется:
- Выбрать подходящую схему регулятора
- Подобрать и купить необходимые компоненты
- Изготовить печатную плату или собрать схему на макетной плате
- Выполнить монтаж компонентов
- Настроить и протестировать регулятор
При самостоятельном изготовлении важно соблюдать меры безопасности, особенно при работе с сетевым напряжением. Для начинающих радиолюбителей рекомендуется начать с простых низковольтных схем.
Преимущества использования регуляторов оборотов
Применение регуляторов оборотов для коллекторных двигателей дает ряд преимуществ:
- Возможность точной настройки скорости вращения
- Плавный пуск и торможение двигателя
- Снижение энергопотребления при работе на пониженных оборотах
- Увеличение срока службы двигателя и механизмов
- Расширение функциональности оборудования
Современные регуляторы оборотов позволяют значительно повысить эффективность работы электроприводов в различных областях применения.
Области применения регуляторов оборотов коллекторных двигателей
Регуляторы оборотов коллекторных двигателей широко используются в различных сферах:
- Бытовая техника (пылесосы, миксеры, швейные машины)
- Электроинструмент (дрели, шлифмашины, лобзики)
- Промышленное оборудование (конвейеры, насосы, вентиляторы)
- Автомобильная электроника (стеклоподъемники, вентиляторы охлаждения)
- Моделизм (радиоуправляемые модели)
Возможность плавного регулирования скорости вращения делает коллекторные двигатели с регуляторами незаменимыми во многих приложениях.
Надежная схема регулятора оборотов коллекторного двигателя без потерь мощности с обратной связью по Тахо
Для выполнения многих видов работ по обработке древесины, металла или других типов материалов требуются не высокие скорости, а хорошее тяговое усилие. Правильнее будет сказать — момент. Именно благодаря ему запланированную работу можно выполнить качественно и с минимальными потерями мощности. Для этого в качестве приводного устройства применяются моторы постоянного тока (или коллекторные), в которых выпрямление питающего напряжения осуществляется самим агрегатом. Тогда для достижения требуемых рабочих характеристик необходима регулировка оборотов коллекторного двигателя без потери мощности.
Особенности регулирования скорости
Важно знать, что каждый двигатель при вращении потребляет не только активную, но и реактивную мощность. При этом уровень реактивной мощности будет больше, что связано с характером нагрузки. В данном случае задачей конструирования устройств регулирования скорости вращения коллекторных двигателей является уменьшение разницы между активной и реактивной мощностями. Поэтому подобные преобразователи будут довольно сложными, и самостоятельно их изготовить непросто.
Поэтому подобные преобразователи будут довольно сложными, и самостоятельно их изготовить непросто.
Своими руками можно сконструировать лишь некоторое подобие регулятора, но говорить о сохранении мощности не стоит. Что такое мощность? С точки зрения электрических показателей, это произведение потребляемого тока, умноженное на напряжение. Результат даст некое значение, которое включает активную и реактивную составляющие. Для выделения только активной, то есть сведения потерь к нулю, необходимо изменить характер нагрузки на активную. Такими характеристиками обладают только полупроводниковые резисторы.
Следовательно, необходимо индуктивность заменить на резистор, но это невозможно, потому что двигатель превратится во что-то иное и явно не станет приводить что-либо в движение. Задача регулирования без потерь заключается в том, чтобы сохранить момент, а не мощность: она все равно будет изменяться. Справиться с подобной задачей сможет только преобразователь, который будет управлять скоростью за счёт изменения длительности импульса открытия тиристоров или силовых транзисторов.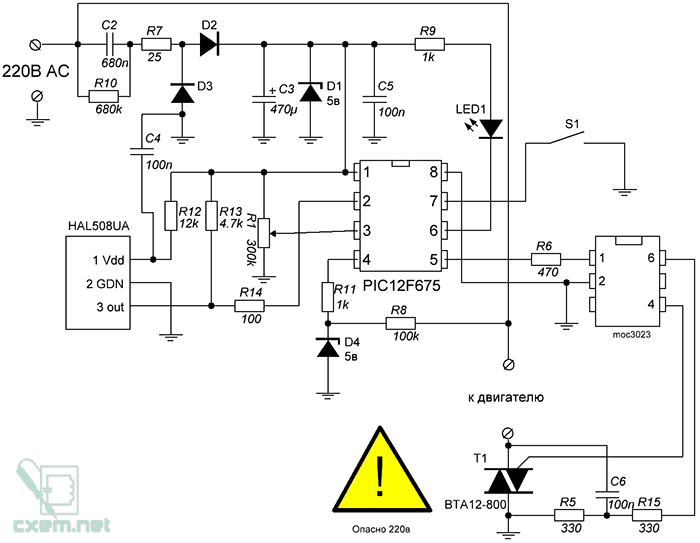
Выбираем устройство
Для того чтобы подобрать эффективный регулятор необходимо учитывать характеристики прибора, особенности назначения.
- Для коллекторных электродвигателей распространены векторные контроллеры, но скалярные являются надёжнее.
- Важным критерием выбора является мощность. Она должна соответствовать допустимой на используемом агрегате. А лучше превышать для безопасной работы системы.
- Напряжение должно быть в допустимых широких диапазонах.
- Основное предназначение регулятора преобразовывать частоту, поэтому данный аспект необходимо выбрать соответственно техническим требованиям.
- Ещё необходимо обратить внимание на срок службы, размеры, количество входов.
Прибор триак
Устройство симистр (триак) используется для регулирования освещением, мощностью нагревательных элементов, скоростью вращения.
Схема контроллера на симисторе содержит минимум деталей, изображенных на рисунке, где С1 – конденсатор, R1 – первый резистор, R2 – второй резистор.
С помощью преобразователя регулируется мощность методом изменения времени открытого симистора. Если он закрыт, конденсатор заряжается посредством нагрузки и резисторов. Один резистор контролирует величину тока, а второй регулирует скорость заряда.
Когда конденсатор достигает предельного порога напряжения 12в или 24в, срабатывает ключ. Симистр переходит в открытое состояние. При переходе напряжения сети через ноль, симистр запирается, далее конденсатор даёт отрицательный заряд.
Обобщенная схема регулятора
Примером регулятора, который осуществляет принцип управления мотором без потерь мощности, можно рассмотреть тиристорный преобразователь. Это пропорционально-интегральные схемы с обратной связью, которые обеспечивают жесткое регулирование характеристик, начиная от разгона-торможения и заканчивая реверсом. Самым эффективным является импульсно-фазовое управление: частота следования импульсов отпирания синхронизируется с частотой сети. Это позволяет сохранять момент без роста потерь в реактивной составляющей. Обобщенную схему можно представить несколькими блоками:
Обобщенную схему можно представить несколькими блоками:
- силовой управляемый выпрямитель;
- блок управления выпрямителем или схема импульсно-фазового регулирования;
- обратная связь по тахогенератору;
- блок регулирования тока в обмотках двигателя.
Перед тем как углубляться в более точное устройство и принцип регулирования, необходимо определиться с типом коллекторного двигателя. От этого будет зависеть схема управления его рабочими характеристиками.
Регулятор усилия шуруповерта
Регулятор усилия представляет собой муфту, ограничивающую усилие при вращении патрона. Она выполнена в виде вращающегося пластикового барабана. Величина ее затяжки регулируется с помощью цифровой шкалы, размещенной по окружности барабана. Увеличивая величину затяжки, тем самым вы глубже ввинчиваете саморез.
Эта функция будет необходима при работе с материалом изделий различной степени твердости, поскольку при работе с мягким материалом тело самореза будет легко утапливаться в нем, слишком высокая твердость материала будет способствовать нарушению геометрии шурупа, особенно если он небольших размеров.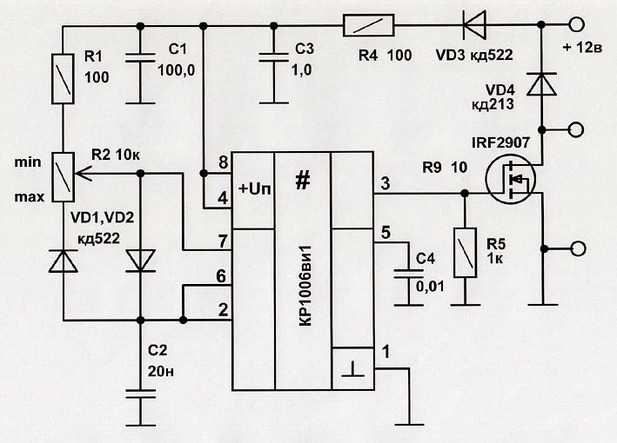 Трещотка, как еще называют регулятор, предотвращает срезание шлицев у саморезов, а также износ насадок шуруповерта. Затягивать регулировочное кольцо следует поэтапно начиная с самого небольшого усилия. В тех шуруповертах, в которых возможно производить сверление, последняя пиктограмма на кольце будет в виде сверла. В этой позиции достигается максимальный крутящий момент.
Трещотка, как еще называют регулятор, предотвращает срезание шлицев у саморезов, а также износ насадок шуруповерта. Затягивать регулировочное кольцо следует поэтапно начиная с самого небольшого усилия. В тех шуруповертах, в которых возможно производить сверление, последняя пиктограмма на кольце будет в виде сверла. В этой позиции достигается максимальный крутящий момент.
Разновидности коллекторных двигателей
Известно, как минимум, два типа коллекторных двигателей. К первому относятся устройства с якорем и обмоткой возбуждения на статоре. Ко второму можно отнести приспособления с якорем и постоянными магнитами. Также необходимо определиться, для каких целей требуется сконструировать регулятор:
- Если необходимо регулировать простым движением (например, вращением шлифовального камня или сверлением), то обороты потребуется изменять в пределах от какого-то минимального значения, неравному нулю, — до максимального. Примерный показатель: от 1000 до 3000 об/мин.
 Для этого подойдёт упрощённая схема на 1 тиристоре или на паре транзисторов.
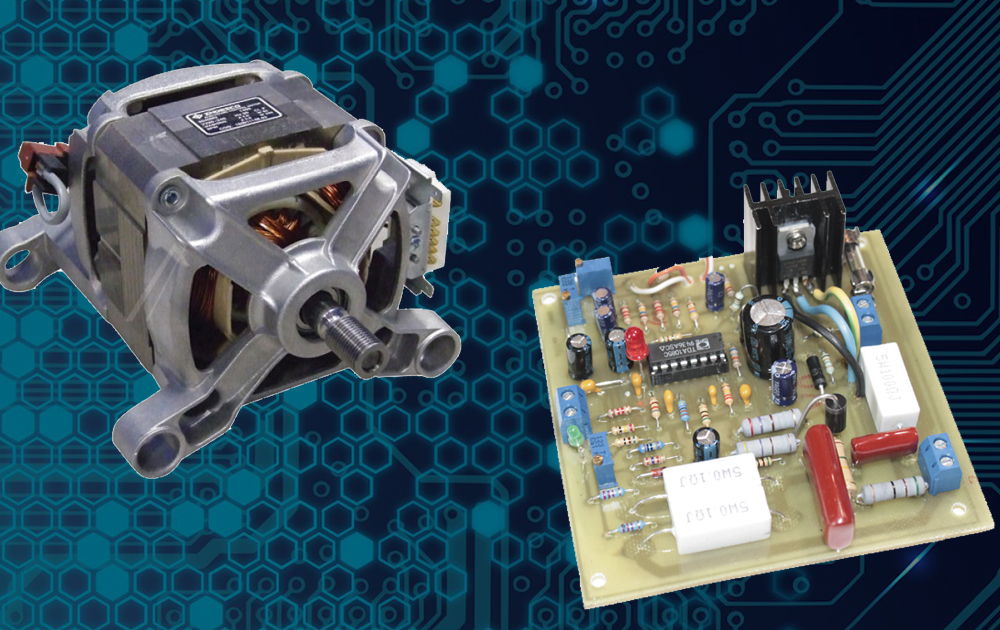
Для этого подойдёт упрощённая схема на 1 тиристоре или на паре транзисторов. - Если необходимо управлять скоростью от 0 до максимума, тогда придется использовать полноценные схемы преобразователей с обратной связью и жёсткими характеристиками регулирования. Обычно у мастеров-самоучек или любителей оказываются именно коллекторные двигатели с обмоткой возбуждения и тахогенератором. Таким мотором является агрегат, используемый в любой современной стиральной машине и часто выходящий из строя. Поэтому рассмотрим принцип управления именно этим двигателем, изучив его устройство более подробно.
Конструкция мотора
Конструктивно двигатель от стиральной машины «Индезит» несложен, но при проектировании регулятора управления его скоростью необходимо учесть параметры. Моторы могут быть различными по характеристикам, из-за чего будет изменяться и управление. Также учитывается режим работы, от чего будет зависеть конструкция преобразователя. Конструктивно коллекторный мотор состоит из следующих компонентов:
- Якорь, на нем имеется обмотка, уложенная в пазы сердечника.
- Коллектор, механический выпрямитель переменного напряжения сети, посредством которого оно передается на обмотку.
- Статор с обмоткой возбуждения. Он необходим для создания постоянного магнитного поля, в котором будет вращаться якорь.
При увеличении тока в цепи двигателя, включенного по стандартной схеме, обмотка возбуждения включена последовательно с якорем. При таком включении мы увеличиваем и магнитное поле, воздействующее на якорь, что позволяет добиться линейности характеристик. Если поле будет неизменным, то получить хорошую динамику сложнее, не говоря уже о больших потерях мощности. Такие двигатели лучше использовать на низких скоростях, так как ими удобнее управлять на малых дискретных перемещениях.
Организовав раздельное управление возбуждением и якорем, можно добиться высокой точности позиционирования вала двигателя, но схема управления тогда существенно усложнится. Поэтому подробнее рассмотрим регулятор, который позволяет изменять скорость вращения от 0 до максимальной величины, но без позиционирования. Это может пригодиться, если из двигателя от стиральной машины будет изготавливаться полноценный сверлильный станок с возможностью нарезания резьбы.
Это может пригодиться, если из двигателя от стиральной машины будет изготавливаться полноценный сверлильный станок с возможностью нарезания резьбы.
От сети
Однофазные электродвигатели переменного тока также позволяют регулировать вращение ротора.
Коллекторные машины
Такие моторы стоят на электродрелях, электролобзиках и другом инструменте. Чтобы уменьшить или увеличить обороты, достаточно, как и в предыдущих случаях, изменять напряжение питания. Для этой цели также есть свои решения.
Конструкция подключается непосредственно к сети. Регулировочный элемент – симистор, управление которого осуществляется динистором. Симистор ставится на теплоотвод, максимальная мощность нагрузки – 600 Вт.
Если есть подходящий ЛАТР, можно все это делать при помощи его.
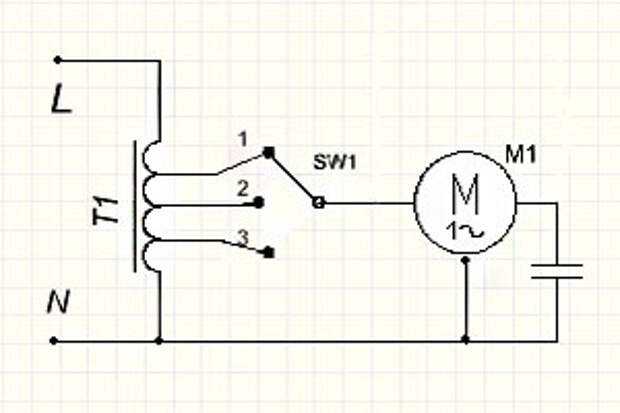
Двухфазный двигатель
Аппарат, имеющий две обмотки – пусковую и рабочую, по своему принципу является двухфазным. В отличие от трехфазного имеет возможность менять скорость ротора.
 Характеристика крутящегося магнитного поля у него не круговая, а эллиптическая, что обусловлено его устройством.
Характеристика крутящегося магнитного поля у него не круговая, а эллиптическая, что обусловлено его устройством.Есть две возможности контролирования числа оборотов:
- Менять амплитуду напряжения питания (Uy),
- Фазное – меняем емкость конденсатора.
Такие агрегаты широко распространены в быту и на производстве.
Обычные асинхронники
Электрические машины трехфазного тока, несмотря на простоту в эксплуатации, обладают рядом характеристик, которые нужно учитывать. Если просто изменять питающее напряжение, будет в небольших пределах меняться момент, но не более. Чтобы в широких пределах регулировать обороты, необходимо довольно сложное оборудование, которое просто так собрать и наладить сложно и дорого.
Для этой цели промышленностью налажен выпуск частотных преобразователей, помогающих менять обороты электродвигателя в нужном диапазоне.
Асинхронник набирает обороты в согласии с выставленными на частотнике параметрами, которые можно менять в широком диапазоне. Преобразователь – самое лучшее решение для таких двигателей.
Преобразователь – самое лучшее решение для таких двигателей.
Выбор схемы
Выяснив все условия, при которых будет использоваться мотор, можно начинать изготавливать регулятор оборотов коллекторного двигателя. Начинать стоит с выбора подходящей схемы, которая обеспечит вас всеми необходимыми характеристиками и возможностями. Следует вспомнить их:
- Регулирование скорости от 0 до максимума.
- Обеспечение хорошего крутящего момента на низких скоростях.
- Плавность регулирования оборотов.
Рассматривая множество схем в интернете, можно сделать вывод о том, что мало кто занимается созданием подобных «агрегатов». Это связано со сложностью принципа управления, так как необходимо организовать регулирование многих параметров. Угол открытия тиристоров, длительность импульса управления, время разгона-торможения, скорость нарастания момента. Данными функциями занимается схема на контроллере, выполняющая сложные интегральные вычисления и преобразования. Рассмотрим одну из схем, которая пользуется популярностью у мастеров-самоучек или тех, кто просто хочет с пользой применить старый двигатель от стиральной машины.
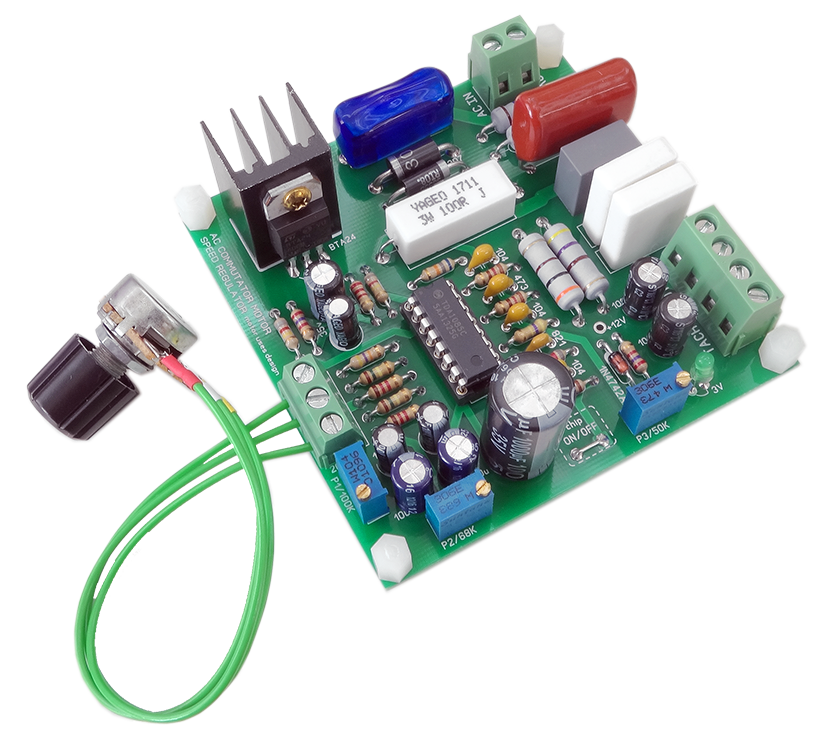
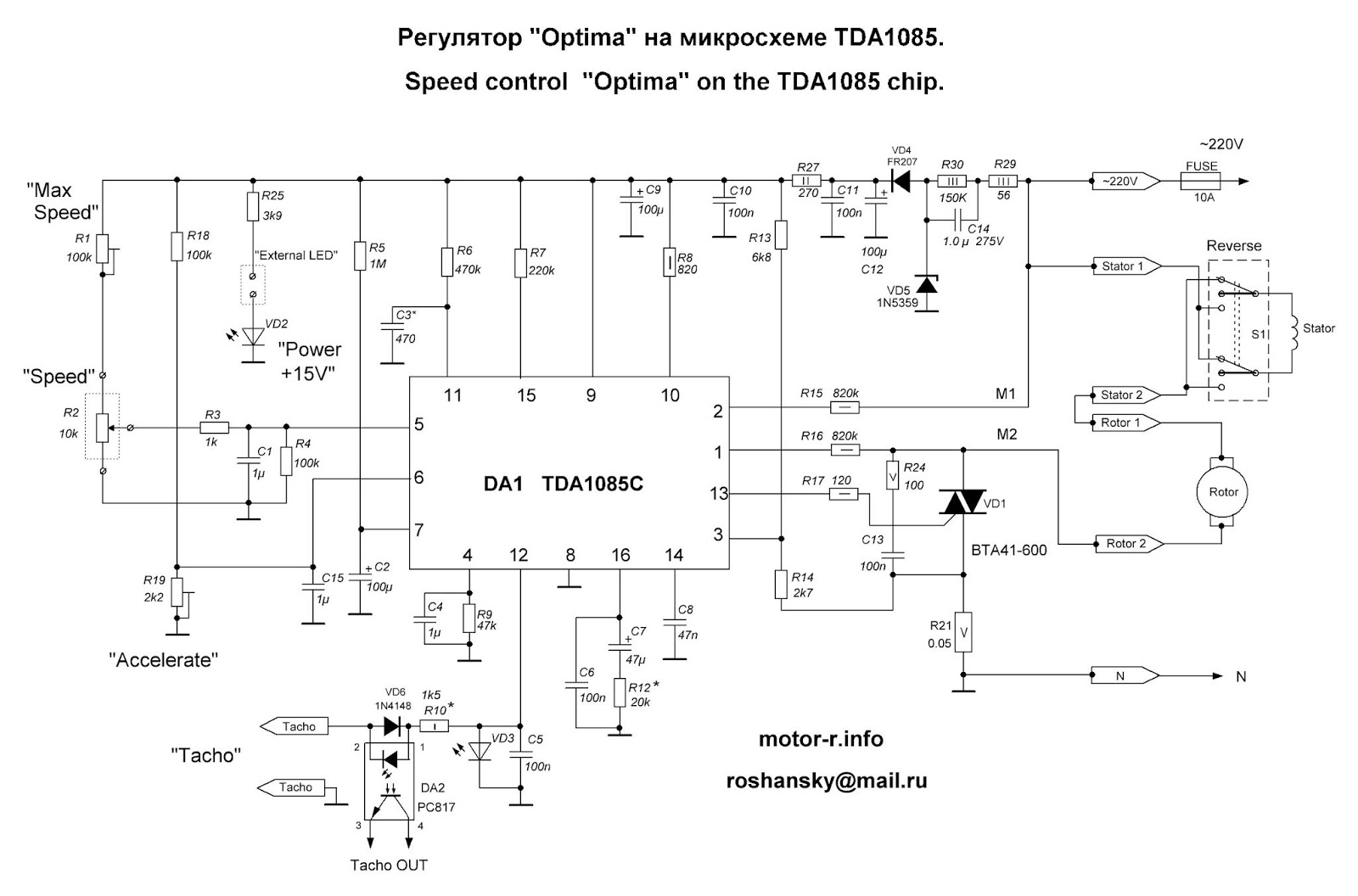
Всем нашим критериям отвечает схема управления скоростью вращения коллекторным двигателем, собранная на специализированной микросхеме TDA 1085. Это полностью готовый драйвер для управления моторами, которые позволяют регулировать скорость от 0 до максимального значения, обеспечивая поддержание момента за счёт использования тахогенератора.
Преобразователи на электронных ключах
Тиристорные регуляторы мощности являются одними из самых распространенных, обладающие простой схемой работы.
Тиристор, работает в сети переменного тока.
Отдельным видом является стабилизатор напряжения переменного тока. Стабилизатор содержит трансформатор с многочисленными обмотками.
Схема стабилизатора постоянного тока
Зарядное устройство 24 вольт на тиристоре
Принцип действия заключаются в заряде конденсатора и запертом тиристоре, а при достижении конденсатором напряжения, тиристор посылает ток на нагрузку.
Процесс пропорциональных сигналов
Сигналы, поступающие на вход системы, образуют обратную связь.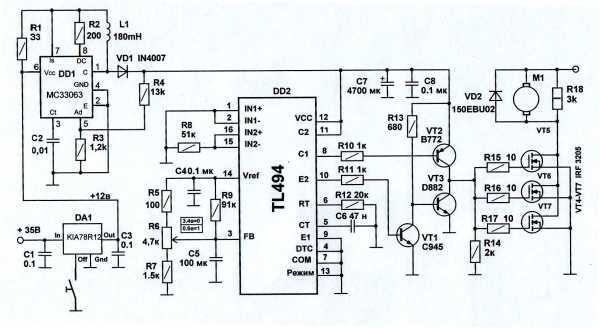 Подробнее рассмотрим с помощью микросхемы.
Подробнее рассмотрим с помощью микросхемы.
Микросхема TDA 1085
Микросхема TDA 1085, изображенная выше, обеспечивает управление электродвигателем 12в, 24в обратной связью без потерь мощности. Обязательным является содержание таходатчика, обеспечивающего обратную связь двигателя с платой регулирования. Сигнал стаходатчика идёт на микросхему, которая передаёт силовым элементам задачу – добавить напряжение на мотор. При нагрузке на вал, плата прибавляет напряжение, а мощность увеличивается. Отпуская вал, напряжение уменьшается. Обороты будут постоянными, а силовой момент не изменится. Частота управляется в большом диапазоне. Такой двигатель 12, 24 вольт устанавливается в стиральные машины.
Своими руками можно сделать прибор для гриндера, токарного станка по дереву, точила, бетономешалки, соломорезки, газонокосилки, дровокола и многого другого.
Промышленные регуляторы, состоящие из контроллеров 12, 24 вольт, заливаются смолой, поэтому ремонту не подлежат.
 Поэтому часто изготавливается прибор 12в самостоятельно. Несложный вариант с использованием микросхемы U2008B. В регуляторе используется обратная связь по току или плавный пуск. В случае использования последнего необходимы элементы C1, R4, перемычка X1 не нужна, а при обратной связи наоборот.
Поэтому часто изготавливается прибор 12в самостоятельно. Несложный вариант с использованием микросхемы U2008B. В регуляторе используется обратная связь по току или плавный пуск. В случае использования последнего необходимы элементы C1, R4, перемычка X1 не нужна, а при обратной связи наоборот.При сборе регулятора правильно выбирать резистор. Так как при большом резисторе, на старте могут быть рывки, а при маленьком резисторе компенсация будет недостаточной.
Важно! При регулировке контроллера мощности нужно помнить, что все детали устройства подключены к сети переменного тока, поэтому необходимо соблюдать меры безопасности!
Регуляторы оборотов вращения однофазных и трехфазных двигателей 24, 12 вольт представляют собой функциональное и ценное устройство, как в быту, так и в промышленности.
Особенности конструкции
Микросхема оснащена всем необходимым для осуществления качественного управления двигателем в различных скоростных режимах, начиная от торможения, заканчивая разгоном и вращением с максимальной скоростью.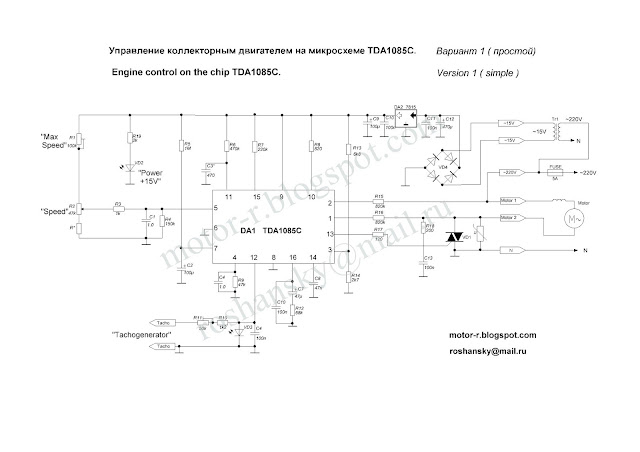 Поэтому ее использование намного упрощает конструкцию, одновременно делая весь привод универсальным, так как можно выбирать любые обороты с неизменным моментом на валу и использовать не только в качестве привода конвейерной ленты или сверлильного станка, но и для перемещения стола.
Поэтому ее использование намного упрощает конструкцию, одновременно делая весь привод универсальным, так как можно выбирать любые обороты с неизменным моментом на валу и использовать не только в качестве привода конвейерной ленты или сверлильного станка, но и для перемещения стола.
Характеристики микросхемы можно найти на официальном сайте. Мы укажем основные особенности, которые потребуются для конструирования преобразователя. К ним можно отнести: интегрированную схему преобразования частоты в напряжение, генератор разгона, устройство плавного пуска, блок обработки сигналов Тахо, модуль ограничения тока и прочее. Как видите, схема оснащена рядом защит, которые обеспечат стабильность функционирования регулятора в разных режимах.
На рисунке ниже изображена типовая схема включения микросхемы.
Схема несложная, поэтому вполне воспроизводима своими руками. Есть некоторые особенности, к которым относятся предельные значения и способ регулирования скоростью:
- Максимальный ток в обмотках двигателя не должен превышать 10 А (при условии той комплектации, которая представлена на схеме).
 Если применить симистор с большим прямым током, то мощность может быть выше. Учтите, что потребуется изменить сопротивление в цепи обратной связи в меньшую сторону, а также индуктивность шунта.
Если применить симистор с большим прямым током, то мощность может быть выше. Учтите, что потребуется изменить сопротивление в цепи обратной связи в меньшую сторону, а также индуктивность шунта. - Максимальная скорость вращения достигается 3200 об/мин. Эта характеристика зависит от типа двигателя. Схема может управлять моторами до 16 тыс. об/мин.
- Время разгона до максимальной скорости достигает 1 секунды.
- Нормальный разгон обеспечивается за 10 секунд от 800 до 1300 об/мин.
- На двигателе использован 8-полюсный тахогенератор с максимальным выходным напряжением на 6000 об/мин 30 В. То есть он должен выдавать 8мВ на 1 об/мин. При 15000 об/мин на нем должно быть напряжение 12 В.
- Для управления двигателем используется симистор на 15А и предельным напряжением 600 В.
Если потребуется организовать реверс двигателя, то для этого придется дополнить схему пускателем, который будет переключать направление обмотки возбуждения. Также потребуется схема контроля нулевых оборотов, чтобы давать разрешение на реверс.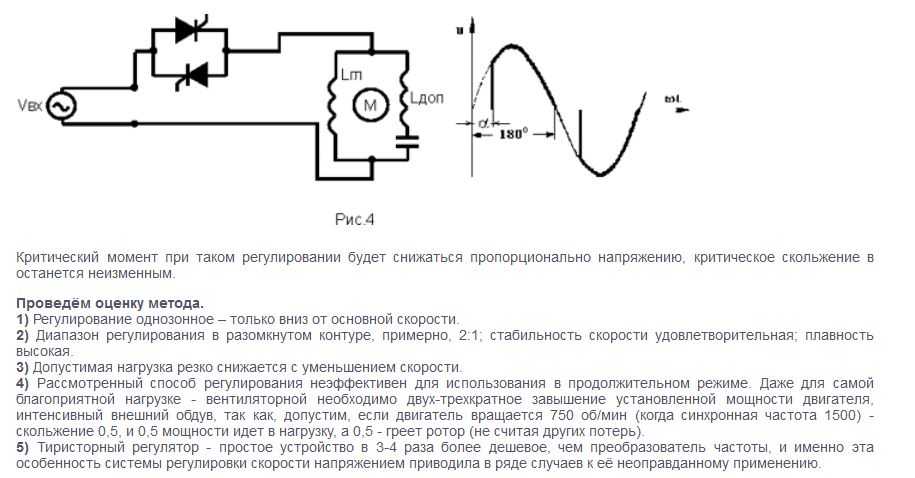 На рисунке не указано.
На рисунке не указано.
Регулятор оборотов электродвигателя 220в
Его можно изготовить совершенно самостоятельно, но для этого нужно будет изучить все возможные технические особенности прибора. По конструкции можно выделить сразу несколько разновидностей главных деталей. А именно:
- Сам электродвигатель.
- Микроконтроллерная система управления блока преобразования.
- Привод и механические детали, которые связаны с работой системы.
Перед самым началом запуска устройства, после подачи определённого напряжения на обмотки, начинается процесс вращения двигателя с максимальным показателем мощности. Именно такая особенность и будет отличать асинхронные устройства от остальных видов. Ко всему прочему происходит прибавление нагрузки от механизмов, которые приводят прибор в движение. В конечном счёте на начальном этапе работы устройства мощность, а также потребляемый ток лишь возрастают до максимальной отметки.
В это время происходит процесс выделения наибольшего количества тепла. Происходит перегрев в обмотках, а также в проводах. Использование частичного преобразования поможет не допустить этого. Если произвести установку плавного пуска, то до максимальной отметки скорости (которая также может регулироваться оборудованием и может быть не 1500 оборотов за минуту, а всего лишь 1000) двигатель начнёт разгоняться не в первый момент работы, а на протяжении последующих 10 секунд (при этом на каждую секунду устройство будет прибавлять по 100−150 оборотов). В это время процесс нагрузки на все механизмы и провода начинает уменьшаться в несколько раз.
Происходит перегрев в обмотках, а также в проводах. Использование частичного преобразования поможет не допустить этого. Если произвести установку плавного пуска, то до максимальной отметки скорости (которая также может регулироваться оборудованием и может быть не 1500 оборотов за минуту, а всего лишь 1000) двигатель начнёт разгоняться не в первый момент работы, а на протяжении последующих 10 секунд (при этом на каждую секунду устройство будет прибавлять по 100−150 оборотов). В это время процесс нагрузки на все механизмы и провода начинает уменьшаться в несколько раз.
Как сделать регулятор своими руками
Можно совершенно самостоятельно создать регулятор оборотов электродвигателя около 12 В. Для этого стоит использовать переключатель сразу нескольких положений, а также специальный проволочный резистор. При помощи последнего происходит изменение уровня напряжения питания (а вместе с этим и показателя частоты вращения). Такие же системы можно применять и для совершения асинхронных движений, но они будут менее эффективными.
Ещё много лет назад широко использовались механические регуляторы — они были построены на основе шестеренчатых приводов или же их вариаторов. Но такие устройства считались не очень надёжными. Электронные средства показывали себя в несколько раз лучше, так как они были не такими большими и позволяли совершать настройку более тонкого привода.
Для того чтобы создать регулятор вращения электродвигателя, стоит использовать сразу несколько устройств, которые можно либо купить в любом строительном магазине, либо снять со старых инвенторных устройств. Чтобы совершить процесс регулировки, стоит включить специальную схему переменного резистора. С его помощью происходит процесс изменения амплитуды входящего на резистор сигнала.
Внедрение системы управления
Чтобы значительно улучшить характеристику даже самого простого оборудования, стоит в схему регулятора оборотов двигателя подключить микроконтроллерное управление. Для этого стоит выбрать тот процессор, в котором есть подходящее количество входов и выходов соответственно: для совершения подключения датчиков, кнопок, а также специальных электронных ключей.
Для осуществления экспериментов стоит использовать особенный микроконтроллер AtMega 128 — это наиболее простой в применении и широко используемый контроллер. В свободном использовании можно найти большое число схем с его применением. Чтобы устройство совершало правильную работу, в него стоит записать определённый алгоритм действий — отклики на определённые движения. К примеру, при достижении температуры в 60 градусов Цельсия (замер будет отмечаться на графике самого устройства), должно произойти автоматическое отключение работы устройства.
Принцип управления
При задании скорости вращения вала двигателя резистором в цепи вывода 5 на выходе формируется последовательность импульсов для отпирания симистора на определенную величину угла. Интенсивность оборотов отслеживается по тахогенератору, что происходит в цифровом формате. Драйвер преобразует полученные импульсы в аналоговое напряжение, из-за чего скорость вала стабилизируется на едином значении, независимо от нагрузки.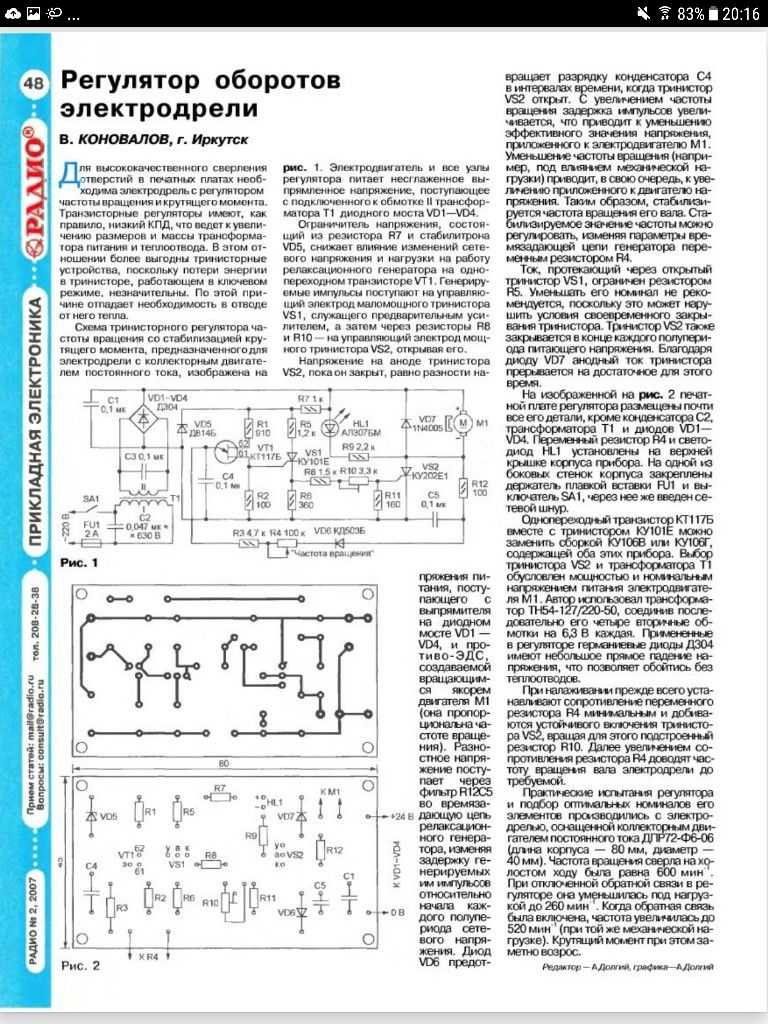 Если напряжение с тахогенератора изменится, то внутренний регулятор увеличит уровень выходного сигнала управления симистора, что приведёт к повышению скорости.
Если напряжение с тахогенератора изменится, то внутренний регулятор увеличит уровень выходного сигнала управления симистора, что приведёт к повышению скорости.
Микросхема может управлять двумя линейными ускорениями, позволяющими добиваться требуемой от двигателя динамики. Одно из них устанавливается по Ramp 6 вывод схемы. Данный регулятор используется самими производителями стиральных машин, поэтому он обладает всеми преимуществами для того, чтобы быть использованным в бытовых целях. Это обеспечивается благодаря наличию следующих блоков:
- Стабилизатор напряжения для обеспечения нормальной работы схемы управления. Он реализован по выводам 9, 10.
- Схема контроля скорости вращения. Реализована по выводам МС 4, 11, 12. При необходимости регулятор можно перевести на аналоговый датчик, тогда выводы 8 и 12 объединяются.
- Блок пусковых импульсов. Он реализован по выводам 1, 2, 13, 14, 15. Выполняет регулировку длительности импульсов управления, задержку, формирования их из постоянного напряжения и калибровку.

- Устройство генерации напряжения пилообразной формы. Выводы 5, 6 и 7. Он используется для регулирования скорости согласно заданному значению.
- Схема усилителя управления. Вывод 16. Позволяет отрегулировать разницу между заданной и фактической скоростью.
- Устройство ограничения тока по выводу 3. При повышении напряжения на нем происходит уменьшение угла отпирания симистора.
Использование подобной схемы обеспечивает полноценное управление коллекторным мотором в любых режимах. Благодаря принудительному регулированию ускорения можно добиваться необходимой скорости разгона до заданной частоты вращения. Такой регулятор можно применять для всех современных двигателей от стиралок, используемых в иных целях.
Увеличение мощности регулятора
В испытательном варианте был применен симистор BT138/800 с максимальным током 12 А, что дает возможность управления нагрузкой более 2 кВт. Если необходимо управление ещё большими токами нагрузки — советуем тиристор установить за пределами платы на большом радиаторе. Также следует помнить о правильном выборе предохранителя FUSE в зависимости от нагрузки.
Также следует помнить о правильном выборе предохранителя FUSE в зависимости от нагрузки.
Кроме управления оборотами электромоторов, можно без каких-либо переделок использовать схему для регулировки яркости ламп.
- Вариант более доступной для сборки схемы, без дефицитных деталей, смотрите тут.
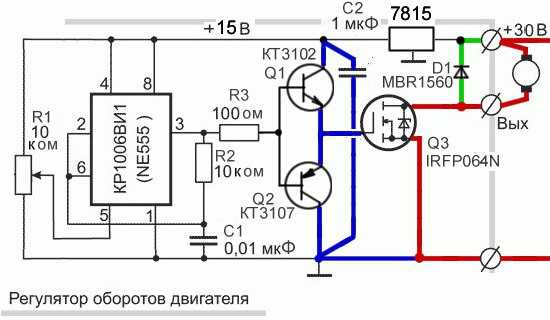
Простой регулятор оборотов электродвигателя от 6 до 25 вольт. Схема и описание
Главная » Измерение и контроль » Простой регулятор оборотов электродвигателя от 6 до 25 вольт. Схема и описание
Этот простой и надежный регулятор оборотов электродвигателя подключается между источником питания и нагрузкой. Питание может поступать от батареи или AC/DC адаптера соответствующей нагрузки.
Нагрузкой может быть любой двигатель постоянного тока или лампа накаливания. Благодаря импульсной работе (ШИМ), схема работает почти без потери энергии. Транзистор управления не требует радиатора.
Схема регулятора идеально подходит для регулировки оборотов дрели для сверления плат. Во время малых оборотов обеспечивает работу дрели с относительно большим крутящим моментом.
Во время малых оборотов обеспечивает работу дрели с относительно большим крутящим моментом.
Логические элементы DD1.1, DD1.2 (CD4011) используются в виде классического ШИМ генератора. Резистор R1 выполняет лишь защитную функцию. Частота генератора определяется емкостью С2 или С3 и сопротивлением потенциометра PR1 вместе с R2, R3. Параллельно соединенные логические элементы DD1.3, DD1.4 управляют транзистором MOSFET (VT1).
При использовании в схеме транзистора MOSFET, резистор R4 не нужен и на его место устанавливается перемычка. Данный резистор (R4) предусмотрен только на тот случай, если вместо MOSFET будет установлен транзистор Дарлингтона структуры n-p-n, например, BD649. Тогда для ограничения тока базы резистор R4 должен иметь значение 1к…2,2к.
Потенциометр PR1 позволяет изменять коэффициент заполнения генерируемого сигнала в очень широких пределах, примерно от 1% до примерно 99%. Сигнал с генератора периодически открывает и закрывает транзистор VТ1, а средняя мощность, поступающая на нагрузку (разъем Z2), зависит от коэффициента заполнения сигнала. Таким образом, потенциометр PR1 позволяет осуществить плавную регулировку мощности, подаваемую на нагрузку.
Таким образом, потенциометр PR1 позволяет осуществить плавную регулировку мощности, подаваемую на нагрузку.
Включенный „наоборот” диод VD4 незаменим при использовании индуктивной нагрузки (например, электродвигатель). Без диода VD4, в момент отключения, на стоке транзистора VT1 могут возникнуть импульсы, значительно превышающие допустимо значение для данного транзистора и это может вывести его из строя.
Благодаря импульсной работе, потери мощности на транзисторе VT1 невелики и поэтому не требует радиатора, даже при токах порядка нескольких ампер, то есть мощности нагрузки до 100 Вт. Следует иметь в виду, что устройство является регулятором мощности, а не стабилизатором оборотов двигателя, поэтому обороты двигателя зависят от его нагрузки.
ВНИМАНИЕ! Схема регулирует мощность в режиме пульсаций, подавая на нагрузку меандр. Такие импульсы могут быть источником электромагнитных помех. Для минимизации помех необходимо использовать по возможности короткие соединения между блоком и нагрузкой.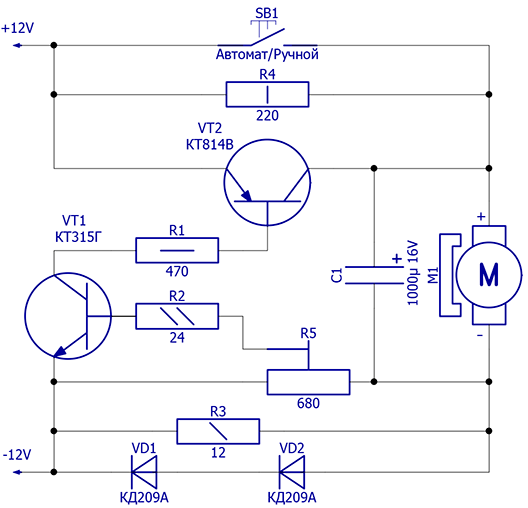
Соединительный шнур должен иметь вид витой пары (обычные два скрученные между провода). Также рекомендуется дополнительно подключить электролитический конденсатор (набор конденсаторов) емкостью 1000… 10000мк к разъему питания Z1.
Инвертор 12 В/ 220 В
Инвертор с чистой синусоидой, может обеспечивать питание переменно…
Подробнее
В схеме предусмотрен дополнительный конденсатор C3, подключаемый с помощью перемычки J1. Включение этого конденсатора вызывает снижение частоты работы генератора с 700Гц до примерно 25Гц. Это полезно с точки зрения генерируемых электромагнитных помех.
Хотя в некоторых случаях снижение частоты может быть неприемлемо, например, это может привести к заметному мерцанию лампы. Тогда необходимо самостоятельно подобрать оптимальную емкость C3.
Тестер транзисторов / ESR-метр / генератор
Многофункциональный прибор для проверки транзисторов, диодов, тиристоров…
Подробнее
Categories Измерение и контроль Tags Регулятор оборотов
Отправить сообщение об ошибке.
Коммутация — Силовая электроника
Я хотел добавить примечание о том, как все это сочетается, когда мы имеем дело с силовой электроникой. Обратите внимание, что область силовой электроники обычно больше интересует, например, эффективное регулирование напряжения (это влияет, например, на то, как долго работает батарея вашего телефона), но в мире машин мы обычно заинтересованы в том, чтобы вращать двигатели.
Итак, мы делаем коммутацию. Вкратце, вот как мы манипулируем токами в катушках индуктивности , чтобы построить магнитных полей в двигателях , чтобы «тянуть» мотор-ротор. Правильная «коммутация» двигателя означает правильное выравнивание этого магнитного поля для получения максимального крутящего момента.
Постоянный ток (щеточный) Коммутация
Преимущество коллекторного двигателя в том, что нам не нужно его коммутировать: за нас это делают щетки: они устроены так, что мощность переключается в переменном направлении через двигатель как он вращается.
Коммутация BLDC
Несмотря на то, что схемы более сложные, коммутация бесколлекторных двигателей в некотором смысле проще, чем, например, шаговые двигатели.
Лучший способ, который я нашел, чтобы думать об этом, состоит в том, чтобы рассмотреть, что ротор (который вращается) имеет статическое магнитное поле, созданное, например, редкоземельными магнитами. У этого есть направление, вектор, о котором мы можем думать. Чтобы «потянуть» ротор, мы хотим создать магнитное поле с нашим статором (магнитный якорь / часть, которая является статической), которое на 90 градусов не совпадает по фазе с ротором. Магнитные поля хотят выровняться (это их минимальное энергетическое состояние), и поэтому мы притягиваем ротор, на каждом шаге (в идеале) измеряя положение ротора, вычисляя желаемые токи, которые создадут магнитное поле 90 градусов от него и т. д. Вроде как вести лошадь морковкой.
Синусоидальная коммутация / управление, ориентированное на поле
При синусоидальной коммутации мы управляем всеми тремя фазами одновременно, мы можем считать, что каждая из них имеет своего рода компонентный вектор, который вносит свой вклад в общее «направление» поля.
Выход этих систем AKA «space vector pwm» — ШИМ-сигналы, которые помещают «вектор» магнитного поля в пространство. Однако наш «вектор напряжения» не равен нашему «вектору тока» (или фактическому вектору поля) — и, таким образом, Field Oriented Control добавляет в смесь дополнительный шаг управления током с обратной связью.
Видео TI на ту же тему
Здесь используются некоторые пространственные преобразования, которые на первый взгляд могут сбить с толку. Они предназначены для эффективного снижения требуемой пропускной способности наших текущих контроллеров… Это целое приключение, я просто даю указатели, поэтому прошу прощения за краткость. Заходите в кроличью нору на свой страх и риск.
Шестиступенчатая коммутация
Более распространенным подходом является «шестиступенчатая» коммутация, ниже:
Преимущество этого заключается в простоте: мы подключаем один полумост к земле, а другой к напряжению.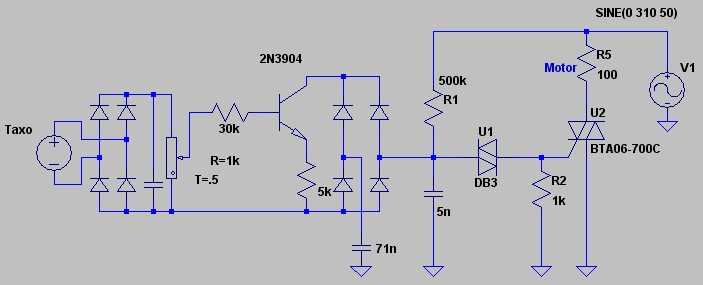 Это пропускает ток через две катушки одновременно (так что это также немного менее плотная мощность). Мы можем легко сделать это аппаратно с помощью переключателей Холла, на что я не собираюсь подробно останавливаться: в основном датчики Холла измеряют положение ротора, измеряя положение магнитного поля ротора.
Это пропускает ток через две катушки одновременно (так что это также немного менее плотная мощность). Мы можем легко сделать это аппаратно с помощью переключателей Холла, на что я не собираюсь подробно останавливаться: в основном датчики Холла измеряют положение ротора, измеряя положение магнитного поля ротора.
Обнаружение обратной ЭДС (BEMF)
В шестиступенчатом контроле (выше) у нас есть «бессенсорное» средство измерения положения ротора (но только когда он уже качается) путем измерения «противной силы электродвигателя». По сути, катушка, которая отличается от , становится датчиком положения ротора: магнитное поле ротора подает на нее напряжение. Его напряжение (которое мы можем измерить с помощью микроконтроллера) колеблется от низкого до высокого (или наоборот), и когда оно достигает в центре напряжения нашего привода и заземления, мы знаем, что ротор сделал, если на полпути через один шаг . Затем мы устанавливаем таймер, который истекает, когда ротор завершает шаг, и продолжаем коммутацию.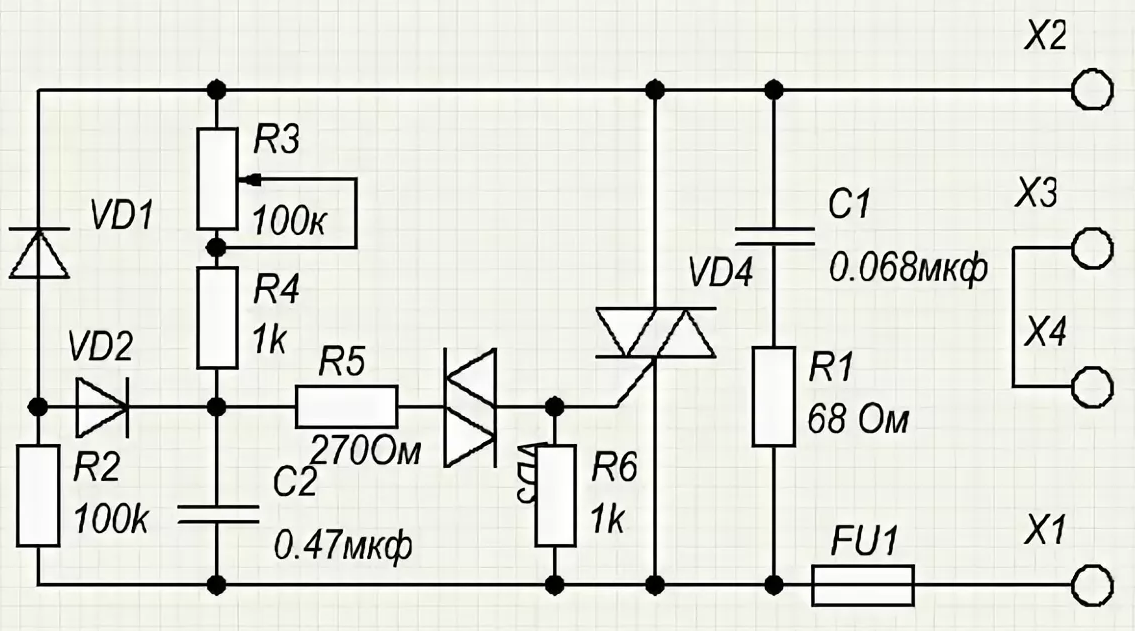
Бессенсорная синусоидальная коммутация
Хорошо! Учтите, что мы можем ощущать обратную ЭДС только тогда, когда катушка активно не переключается. Как же тогда это возможно, когда мы вводим полную синусоиду в каждую катушку, как указано выше?
Напомним, что каждая из этих синусоид на самом деле состоит из множества меньших циклов переключения: наш рабочий цикл в каждой катушке редко составляет 100%. Таким образом, мы, , можем определять «свободное» напряжение катушки во время отключения ШИМ.
Звучит сложно? Правильный. Это требует очень низкоуровневых манипуляций с периферийными устройствами микроконтроллера (например, выборка только АЦП, считывающих напряжение, когда напряжение, управляющее ШИМ, низкое) и действительно хорошей входной фильтрации / оценки состояния.
На эту тему есть ti doc и примечание к приложению микрочипа.
Шаговая коммутация
Шаговая коммутация немного проще.
Однако это усложняется внутренней геометрической сложностью шагового двигателя. Наиболее распространенным типом, который мы находим, является «гибридный шаговый двигатель», который частично представляет собой двигатель с переменным сопротивлением, частично двигатель с постоянными магнитами.
Наиболее распространенным типом, который мы находим, является «гибридный шаговый двигатель», который частично представляет собой двигатель с переменным сопротивлением, частично двигатель с постоянными магнитами.
Шаговый двигатель, ориентированный на поле
Я сомневаюсь, что у меня есть на это время, но достаточно сказать, что шаговый двигатель можно рассматривать как BLDC и управлять полностью синусоидальным (и замкнутым контуром) управлением, ориентированным на поле. Это то, что я разработал для своего драйвера шагового двигателя: контроллер определяет положение ротора и (с учетом калибровочной таблицы) может быстро вычислить выходы, которые генерируют магнитное поле, равное 9Смещение на 0 градусов относительно статического поля ротора.
Я написал большой старый журнал о том, как я разобрался с этим, включая фрагменты кода и т. д.
д.
В результате получилась отличная производительность двигателя: Анастасия Пономарева | Integra Sources
Контроллер двигателя постоянного тока обеспечивает эффективную и безопасную работу двигателя постоянного тока, который находит широкое применение в различных отраслях промышленности. В этом посте мы расскажем вам о типах, областях применения и конструктивных аспектах контроллеров двигателей постоянного тока, уделив особое внимание коллекторным двигателям.
Контроллер двигателя постоянного тока управляет работой электродвигателя, питаемого постоянным током . Это устройство управления может запускать и останавливать двигатель, изменять направление вращения, контролировать скорость и крутящий момент, предотвращать электрические неисправности и выполнять некоторые другие функции.
Его конструкция и принципы работы во многом зависят от конструкции двигателя, которая отличается для коллекторных , бесщеточных и шаговых двигателей постоянного тока.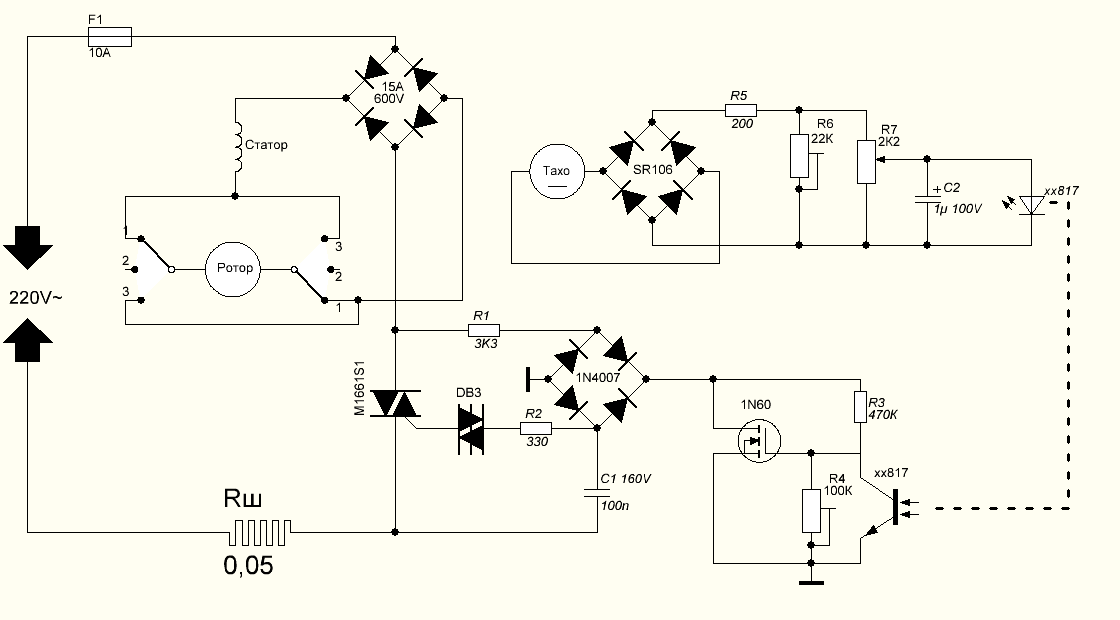 Например, кроме якорь (или ротор ) и статор , щеточный двигатель постоянного тока (BDC) имеет коммутатор с щетками , которые соединяют якорь с источником питания постоянного тока.
Например, кроме якорь (или ротор ) и статор , щеточный двигатель постоянного тока (BDC) имеет коммутатор с щетками , которые соединяют якорь с источником питания постоянного тока.
В двигателе BDC ток протекает по обмоткам якоря и статора, создавая вокруг них электромагнитные поля. Схожие полюса магнитных полей отталкивают друг друга и обеспечивают однонаправленное движение. Когда противоположные полюса встречаются, коммутатор переключает ток, подаваемый на ротор, и меняет полярность магнитного поля, чтобы поддерживать вращение якоря.
Контроллер коллекторного двигателя постоянного тока регулирует ток и напряжение, подаваемые на двигатель, и, таким образом, управляет его скоростью и крутящим моментом. Существуют различные типы контроллеров двигателей BDC; некоторые принципы их классификации работают и для других контроллеров двигателей постоянного тока.
Контроллеры двигателей постоянного тока можно разделить на несколько типов.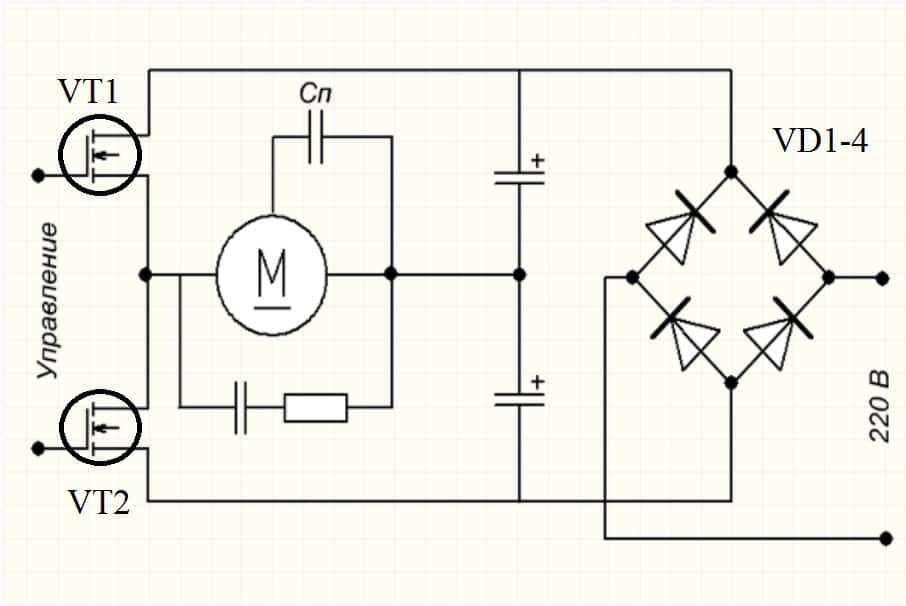 Мы выбрали несколько характеристик и классифицировали контроллеры в соответствии со следующими принципами:
Мы выбрали несколько характеристик и классифицировали контроллеры в соответствии со следующими принципами:
Тип двигателя постоянного тока
Вы можете использовать контроллер с различными двигателями постоянного тока, такими как коллекторный двигатель постоянного тока, бесщеточный двигатель постоянного тока (BLDC) и шаговый двигатель. мотор. И двигатели, и их контроллеры различаются по устройству и принципам работы.
Тип регулирования мощности
Для регулирования скорости и крутящего момента двигателя BDC его контроллер изменяет мощность, подаваемую на двигатель. Вы можете сделать это, используя либо линейный стабилизатор напряжения, обеспечивающий стабильное выходное напряжение, либо импульсный стабилизатор, использующий метод широтно-импульсной модуляции ( PWM ).
Мощность двигателя
Ток, подаваемый источником питания, определяет мощность двигателя. Таким образом, маломощный двигатель BDC требует слаботочного контроллера и наоборот.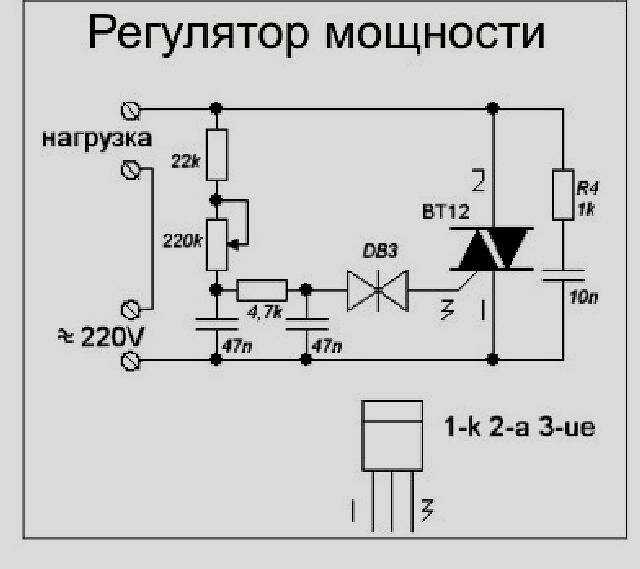
Рабочее напряжение двигателя
Контроллеры двигателей BDC могут работать как с низким, так и с высоким напряжением. Это зависит от напряжения, которое необходимо конкретному двигателю для его правильной работы.
Тип управляющего сигнала
Контроллеры моторов могут иметь цифровые версии и аналоговые версии . Обычно в цифровых контроллерах используются микроконтроллеры, включая как аппаратное обеспечение, так и прошивку.
Тип управления
A с обратной связью Контроллер двигателя постоянного тока может принимать обратная связь от двигателя, обнаружить любые колебания и скорректировать параметры двигателя в соответствии с заданными значениями. Контроллер с разомкнутым контуром или без обратной связи не получает обратной связи, поэтому он не может обнаруживать колебания в работе двигателя.
Имея различные конфигурации, двигатели постоянного тока находят широкое применение во многих системах и отраслях промышленности.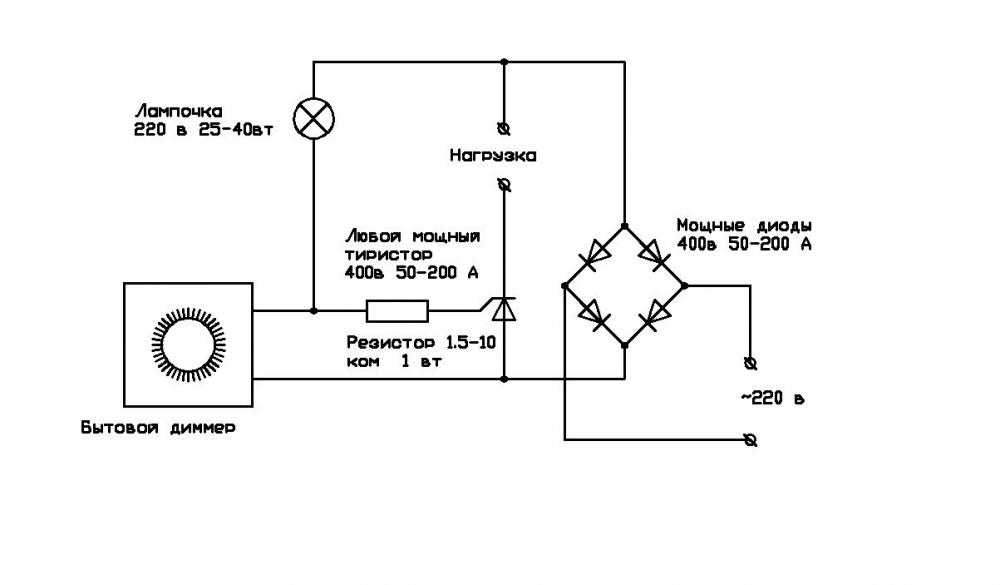 Например, шаговые двигатели используются в роботах, камерах, станках с ЧПУ и других устройствах, которым требуется высокоточное позиционирование.
Например, шаговые двигатели используются в роботах, камерах, станках с ЧПУ и других устройствах, которым требуется высокоточное позиционирование.
В бесщеточном двигателе постоянного тока вместо щеток используется электронный коммутатор, что делает его более долговечным и безопасным. Вы можете найти его в электромобилях, системах отопления и вентиляции.
Коллекторные двигатели постоянного тока — самые старые двигатели, работающие от постоянного тока. В настоящее время им приходится конкурировать с более современными технологиями, но они по-прежнему популярны во многих отраслях. Двигатель BDC имеет простую конструкцию и простую в использовании систему управления. Это экономичное решение, применяемое в бытовой электронике, робототехнике и промышленных системах.
Рынок богат готовыми блоками управления BDC, поэтому вы всегда можете выбрать готовое решение, соответствующее вашим потребностям. Если вы хотите создать свой собственный контроллер, вы должны знать о ключевых моментах схемы контроллера двигателя BDC.
Традиционно контроллер двигателя BDC имеет цепь Н-моста , которая включает два переключателя верхнего плеча и два переключателя нижнего плеча. Они открываются и закрываются по диагонали, поочередно подают положительное и отрицательное напряжение и вращают двигатель. В более простых схемах двигателя BDC может использоваться только один переключатель размыкания/замыкания.
Во избежание перегорания или других отказов транзисторных ключей убедитесь, что они соответствуют характеристикам двигателя. Возможные варианты транзисторов:
- мощность МОП-транзисторы с высокой скоростью переключения, низкой ценой и простотой обслуживания;
- БТИЗ , которые сочетают в себе характеристики мощных полевых МОП-транзисторов и биполярных переключателей и обеспечивают высокий уровень тока;
- GaNs , которые могут выдерживать высокие температуры и работать в очень высоких диапазонах частот и напряжений.

