Что такое 6-осевой гироскоп. Как он работает. Где применяется 6-осевой гироскоп. Какие преимущества дает использование 6-осевого гироскопа в мобильных устройствах. Чем отличается от 3-осевого гироскопа.
Что такое 6-осевой гироскоп и как он работает
6-осевой гироскоп — это электронное устройство, объединяющее в себе два датчика:
- 3-осевой гироскоп
- 3-осевой акселерометр
Гироскоп измеряет угловую скорость вращения устройства вокруг трех осей (X, Y, Z). Акселерометр определяет линейное ускорение по тем же трем осям. Объединение этих двух датчиков в одном корпусе позволяет получить полную информацию о движении и положении устройства в пространстве.
Основные области применения 6-осевых гироскопов
6-осевые гироскопы нашли широкое применение в различных сферах:
- Мобильные устройства (смартфоны, планшеты)
- Носимая электроника (фитнес-трекеры, умные часы)
- Игровые контроллеры
- Системы стабилизации изображения в камерах
- Беспилотные летательные аппараты
- Роботы и автоматизированные системы
- Автомобильные системы безопасности и навигации
Преимущества использования 6-осевого гироскопа в современных устройствах
Интеграция 6-осевого гироскопа в современные устройства дает ряд существенных преимуществ:

- Точное определение положения и ориентации устройства в пространстве
- Улучшенное распознавание жестов и движений пользователя
- Повышение точности навигации в помещениях и на открытом пространстве
- Стабилизация изображения в фото- и видеосъемке
- Расширение возможностей для создания иммерсивных игр и приложений виртуальной реальности
Принцип работы 6-осевого гироскопа
Работа 6-осевого гироскопа основана на сочетании двух типов измерений:
- Гироскопический компонент использует эффект Кориолиса для определения угловой скорости вращения
- Акселерометр измеряет проекции вектора ускорения на три оси координат
Данные от обоих датчиков обрабатываются встроенным процессором, который выполняет алгоритмы комплексирования (sensor fusion). Это позволяет скомпенсировать недостатки каждого из датчиков и получить точную информацию о движении устройства.
Отличия 6-осевого гироскопа от 3-осевого
Главное отличие 6-осевого гироскопа от 3-осевого заключается в наличии дополнительного акселерометра. Это дает ряд преимуществ:

- Более точное определение положения устройства
- Возможность измерения линейных ускорений
- Компенсация дрейфа гироскопа
- Расширенные возможности для анализа движения
3-осевой гироскоп способен измерять только угловые скорости, в то время как 6-осевой дает полную картину движения устройства.
Применение 6-осевых гироскопов в мобильных устройствах
В современных смартфонах и планшетах 6-осевые гироскопы используются для реализации множества полезных функций:
- Автоматический поворот экрана при изменении ориентации устройства
- Управление играми с помощью наклона устройства
- Стабилизация видео при съемке
- Точное позиционирование устройства для дополненной реальности
- Подсчет шагов и анализ физической активности
- Улучшение работы навигационных приложений
Перспективы развития технологии 6-осевых гироскопов
Технология 6-осевых гироскопов продолжает активно развиваться. Основные направления совершенствования включают:
- Повышение точности измерений
- Уменьшение энергопотребления
- Миниатюризация компонентов
- Интеграция дополнительных датчиков (например, магнитометра)
- Разработка более совершенных алгоритмов обработки данных
Эти улучшения позволят расширить сферы применения 6-осевых гироскопов и сделать их использование еще более эффективным в различных устройствах.

Как выбрать 6-осевой гироскоп для своего проекта
При выборе 6-осевого гироскопа для конкретного применения следует учитывать несколько ключевых параметров:
- Диапазон измерений гироскопа и акселерометра
- Чувствительность и точность измерений
- Уровень шума и стабильность показаний
- Энергопотребление
- Наличие встроенных алгоритмов обработки данных
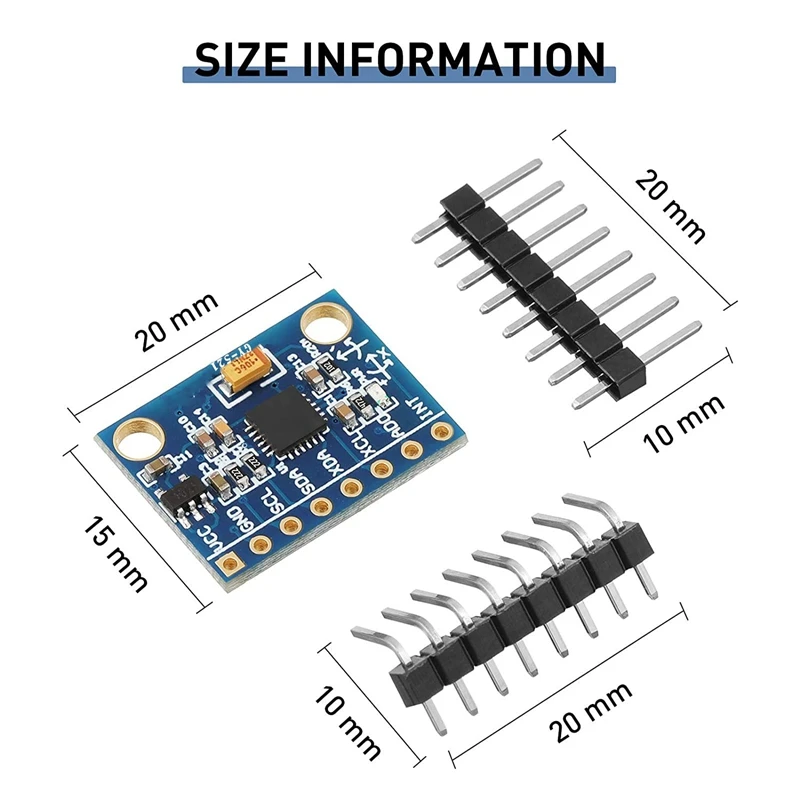
- Интерфейсы подключения (I2C, SPI)
- Размеры и тип корпуса
Важно выбирать компонент, характеристики которого наилучшим образом соответствуют требованиям конкретного проекта. Для высокоточных применений может потребоваться более дорогой и качественный сенсор, в то время как для простых задач подойдет бюджетный вариант.
В чем разница между 3-осевыми и 6-осевыми гироскопами?
- гироскоп
- Физика
Анубис
Есть ли реальная разница между этими двумя модулями? Если да, то что это?
SDварфы
Нет никакого «шестиосного гироскопа»…
Если вы где-то прочитали «гироскоп: 6 осей», возможно, это связано с ограниченными знаниями человека, заполняющего поля, или с ограниченным количеством полей (например, есть поле описания для «гироскопа», но нет для «акселерометра»). ).
На самом деле это будет означать 3D-гироскоп (3 оси) + 3D-акселерометр (в 99% случаев может быть и 3D-компас).
Есть только 3 возможные оси для гироскопа. Таким образом, наличие 6 значений измерения будет означать: измерение (по крайней мере, косвенно) всей оси дважды. Это может иметь смысл, если вы хотите избежать отказа всего устройства, если один гироскоп неисправен. Также: достижение более точных измерений. Но обратите внимание, что большая часть шума измерения связана с выбросами/шумом источника питания. Таким образом, вам нужно было бы иметь 2 независимых источника питания, чтобы иметь действительно независимые измерения (таким образом, достигается улучшение шума измерения на 3 дБ [= половина шума]).
Таким образом, вам нужно было бы иметь 2 независимых источника питания, чтобы иметь действительно независимые измерения (таким образом, достигается улучшение шума измерения на 3 дБ [= половина шума]).
Стивенвх
Гироскоп измеряет скорость вращения, а в трехмерной системе это может быть только около трех осей: крена, рыскания и тангажа. Как говорит Джим, другие 3 параметра могут быть получены от акселерометра, который также дает вам положение вращения вокруг тех же 3 осей.
Вам нужно 6 параметров, чтобы описать положение и ориентацию объектов: расстояние в направлениях X, Y и Z и вращение вокруг осей X, Y и Z. Гироскоп/акселерометр может помочь вам с вращением, но не может обнаружить боковое движение. (Акселерометр может косвенно измерять смещение, но для этого требуется двойной интеграл, что может поставить под угрозу точность.)
Джим Пэрис
Я считаю, что «3-осевой гироскоп» — это именно то, что он говорит, а «6-осевой гироскопический модуль» — это 3-осевой гироскоп плюс 3-осевой акселерометр.
Джеймс
Подтверждаю вопрос о 6-осевой гироскопической системе. Он используется для коррекции радиолокационных изображений на парусной лодке. Основные тангаж, крен, рыскание — это типичные 3 оси, а ускорение вращения для каждой оси — это вторые 3 оси. Почему? Ну, на лодке у вас очень сложное движение, даже больше, чем на самолете. На лодке вас толкает и опрокидывает в сторону ветер, поднимает и опускает волна, и вы соскальзываете с оси течением. Полный вращательный МОМЕНТ очень полезен для коррекции радиолокационного изображения. Особенно если учесть, что радар установлен на мачте значительно выше центра масс.
Сказав все это, разница в 6 осях по сравнению с 3-осевым гироскопом (или, если вы используете феррозондовый акселерометр) является небольшим преимуществом, поэтому … часто 3-осевой будет делать свою работу. Однако авианосец в бурном море при попытке посадить истребитель при боковом ветре и нервном пилоте всегда предпочтет 6-осную. Мы все можем поблагодарить г-на Исаака Ньютона за этот лакомый кусочек.
ClayStation
Я думаю, что они называют это «6-осевым гироскопом», потому что функция гироскопа и функция акселерометра выполняются одним и тем же устройством, «гироскопом». Это делается для того, чтобы различать более простые устройства с 3-осевым гироскопом, поскольку они по сути являются одной и той же частью, отдельного акселерометра нет, это просто дополнительная функциональность к «гироскопу», которую практически ничего не стоит добавить, но они могут добавить большие деньги к ценнику модели за. Вот как «флайбар» вымер, 3-осевой гироскоп сделал его устаревшим, когда он заменил одноосный гироскоп «удержание курса» практически без дополнительных затрат.
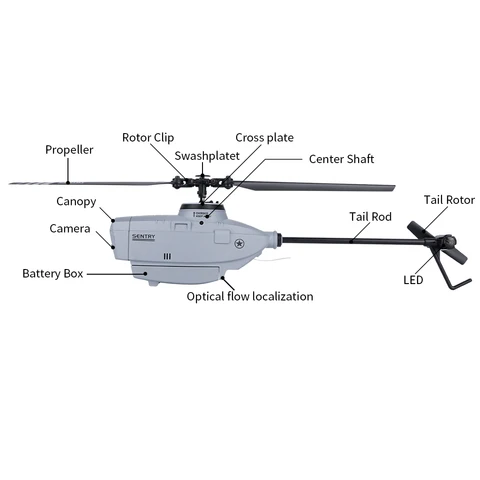
Walkera V450D03 Flybarless вертолет с 6-осевой гироскоп
JavaScript seems to be disabled in your browser.
You must have JavaScript enabled in your browser to utilize the functionality of this website.
Proceed to Checkout
Итоговая цена
0,00 A$
Корзина 0
Хотите бесплатную доставку? кликните сюда Узнать больше!
{{/findAutocomplete}}
SKU: {{sku}} {{#isFreeshipppingEnabled}} Бесплатная доставка подходящих заказов {{/isFreeshipppingEnabled}}
{{#isDiscountFlag1Enabled}}
{{/isDiscountFlag1Enabled}} {{#isDiscountFlag2Enabled}}
{{/isDiscountFlag2Enabled}} {{#isDiscountFlag3Enabled}}
{{/isDiscountFlag3Enabled}} {{#isDiscountFlag4Enabled}}
{{/isDiscountFlag4Enabled}} {{#isDiscountFlag5Enabled}}
{{/isDiscountFlag5Enabled}} {{#isDiscountFlag6Enabled}}
{{/isDiscountFlag6Enabled}} {{#isDiscountFlag7Enabled}}
{{/isDiscountFlag7Enabled}} {{#isDiscountFlag8Enabled}}
{{/isDiscountFlag8Enabled}} {{#isDiscountFlag9Enabled}}
{{/isDiscountFlag9Enabled}} {{#list_image_url}}{{/list_image_url}} {{^list_image_url}}{{/list_image_url}}
{{#isFreeshipppingEnabled}}
Бесплатная доставка подходящих заказов
{{/isFreeshipppingEnabled}} {{#isAddToCartEnabled}} {{#isWarehouseAddToCartEnabled}} {{^is_combo_product}}
Количество: {{#isAgerestrictionEnabled}} {{/isAgerestrictionEnabled}} {{^isAgerestrictionEnabled}} {{/isAgerestrictionEnabled}}{{/is_combo_product}} {{/isWarehouseAddToCartEnabled}} {{/isAddToCartEnabled}} {{#availableInOtherWarehouses}} {{{availableInOtherWarehouses}}} {{/availableInOtherWarehouses}} {{#is_combo_product}} {{^isProhibited}} Подробнее {{/isProhibited}} {{/is_combo_product}} {{#isProhibited}}
We are sorry, this product is not available in your country
{{/isProhibited}}
{{#hbk_price.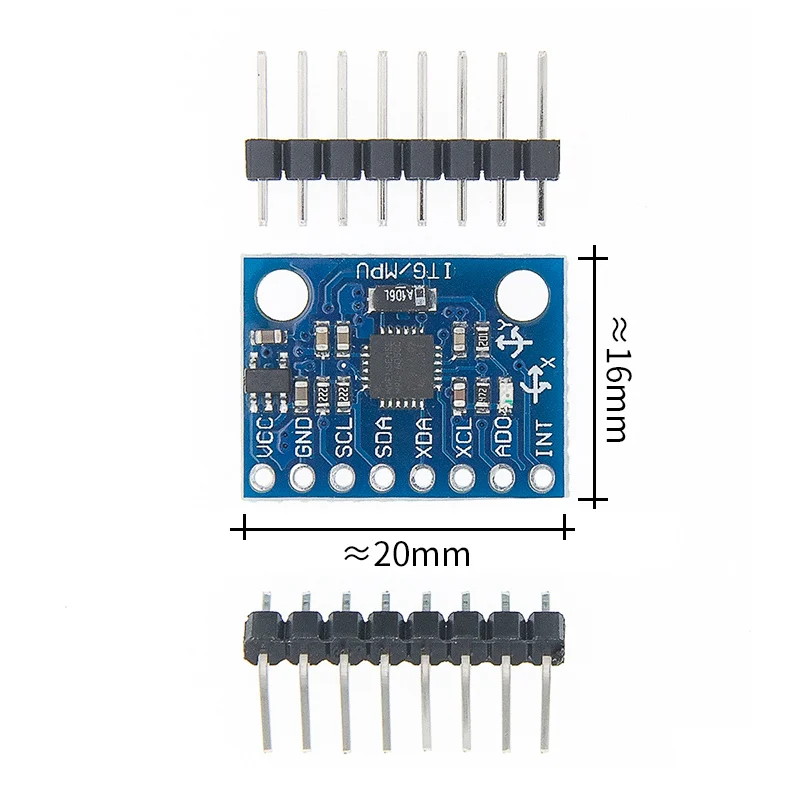 stock_2_group_0_original_formated}}
{{hbk_price.stock_2_group_0_original_formated_label}}
{{hbk_price.stock_2_group_0_original_formated}}
{{/hbk_price.stock_2_group_0_original_formated}}
{{#is_combo_product}}
{{hbk_price.stock_2_group_0_combo_price_label}}
{{/is_combo_product}}
{{hbk_price.stock_2_group_0_formated}}
{{#hbk_price.stock_2_group_0_original_formated}}
{{hbk_price.stock_2_group_0_you_save_formated_label}}
{{hbk_price.stock_2_group_0_you_save_formated}}
{{/hbk_price.stock_2_group_0_original_formated}}
stock_2_group_0_original_formated}}
{{hbk_price.stock_2_group_0_original_formated_label}}
{{hbk_price.stock_2_group_0_original_formated}}
{{/hbk_price.stock_2_group_0_original_formated}}
{{#is_combo_product}}
{{hbk_price.stock_2_group_0_combo_price_label}}
{{/is_combo_product}}
{{hbk_price.stock_2_group_0_formated}}
{{#hbk_price.stock_2_group_0_original_formated}}
{{hbk_price.stock_2_group_0_you_save_formated_label}}
{{hbk_price.stock_2_group_0_you_save_formated}}
{{/hbk_price.stock_2_group_0_original_formated}}
| Покупка |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
| Статус | NR/ND | NR/ND | NR/ND | NR/ND | NR/ND | NR/ND | NR/ND | NR/ND | NR/ND | NR/ND | NR/NR | NR/ND | NR/ND | NR/ND | NR/ND | NR/ND | NR | NR/ND | NR/ND | NR/ND | ||
| Ключевой атрибут | Высокопроизводительный 6-осевой IMU с улучшенной поддержкой камеры | Высокопроизводительный 6-осевой IMU с отслеживанием движения | Высокопроизводительный 6-осевой IMU отслеживания движения | Высокопроизводительный 6-осевой IMU отслеживания движения с расширенным диапазоном | Высокопроизводительный 6-осевой IMU отслеживания движения со специализированным программным обеспечением для HMD и VR | Высокопроизводительный 6-осевой IMU отслеживания движения | 6-осевой двухрежимный (UI и OIS) MEMS-устройство отслеживания движения | Высокопроизводительный 6-осевой IMU отслеживания движения с широким диапазоном измерений | Высокопроизводительный 6-осевой IMU отслеживания движения в устаревшем корпусе | 6-осевой IMU с отслеживанием движения | 6-осевой IMU с отслеживанием движения | |||||||||||
| Целевой рынок и приложения | Приложения для камер: EIS и OIS | Игры, носимые устройства, робототехника, Интернет вещей | Смартфоны, Интернет вещей Планшеты, игры, носимые устройства, робототехника, Интернет вещей | Смартфоны и планшеты, дисплеи на голове | Спорт, носимые датчики, высокоэффективные приложения | Смартфоны, планшеты, дроны, игры, носимые устройства | Общий рынок IMU | Общий рынок IMU | ||||||||||||||
| # Axes | 6 | 6 | 6 | 6 | 6 | 6 | 6 | 6 | 6 | 6 | ||||||||||||
| Датчики | Ускорение + гироскоп | Ускорение + гироскоп | Ускорение + гироскоп | Ускорение + Гироскоп | Ускорение + Гироскоп | Ускорение + Гироскоп | Ускорение + Гироскоп | Ускорение + Гироскоп | Ускорение + Гироскоп | Ускорение + Гироскоп | 5 Ускорение | |||||||||||
| Встроенный процессор (S) | NO | NO | NO | NO | NO | DMP | NO | DMP | DMP | DMP | DMP | DMP | DMP | 9000.DMP | DMP | DMP | DMP | DMP | DMP | DMP | DMP | . |
| Особенности | Низкая чувствительность гироскопов ошибок | Пробуждение при движении | Пробуждение при движении | Высокий FSR, Пробуждение при движении | Внешняя библиотека ПО Senor Fusion с выходом Sensor Fusion 1 кГц и динамической калибровкой отслеживания смещения обнаружение значительного движения, шагомер | Пробуждение при движении | 6- и 9-осевая технология Cal/Fusion на основе DMP, функции Android M: шагомер, значительное движение, отображение, классификация основных действий, захват | Особенности DMP: объединение 6-осевых датчиков, динамическая калибровка гироскопа | Характеристики DMP: объединение 6-осевых датчиков, динамическая калибровка гироскопов, определение касания, ориентация Android, шагомер | Характеристики DMP: объединение 6-осевых датчиков, динамическая калибровка гироскопов , Обнаружение касания, Ориентация Android, Шагомер | ||||||||||||
| Package-Pin | 3 × 3 × 0,75 мм LGA 16-верности | 3 × 3 × 0,75 мм LGA 16-верности | 2,5 × 3 × 0,91 мм LGA 14-лиды | 2,5 × 3 × 0,91 мм0005 | 3 × 3 × 0,75 мм LGA 16-Leads | 3 × 3 × 0,75 мм LGA 16-верности | 3 × 3 × 0,75 мм LGA 16-х лиад | 2,5 × 3 × 0,91 мм LGA | 2,5 × 3 × 0,91 мм LADS | 2,5 × 3 × 0,91 мм LADS | 2,5 × 0,91 мм LGA | 2,5 × 0,95 мм LGA | 2,5 × 0,95 мм LGA -Ладс | 3 × 3 × 0,9 мм QFN 24-лиги | 4 × 4 × 0,9 мм QFN 24-х | 4 × 4 × 0,9 мм QFN 24-лиги | 4 × 4 × 0,9 мм QFN | 4 × 4 × 0,9 мм QFN | 4 4 × 0,9 мм QFN QFN 24 провода |
|||
| Гироскоп | ||||||||||||||||||||||
| FSR (dps) | ±125 ±250 ±500 | ±250 ±500 ±1000 ±2000 | ±250 ±500 ±1000 ±2000 | ±500 ±1000 ±2000 ±4000 | ±250 ±500 ±1000 ±2000 | ±250 ±500 ±1000 ±2000 | ±31. 25 25 ±62.5 ±125 ±250 ±500 ± 1000 ±2000 | ±500 ±1000 ±2000 ±4000 | ± 250 ± 500 ± 1000 ± 2000 | ± 250 ± 500 ± 1000 ± 2000 | ± 250 ± 500 ± 1000 | ± 250 ± 500 ± 1000 | ± 250 ± 500 ± 1000 5550 ± 500 ± 1000 |
± 250 ± 500 ± 100059 ± 250 . | ||||||||
| Gyro ZRO (DPS) | ± 5 | ± 1 | ± 1 | ± 5 | ± 1 | ± 10 0005 | ± 1 | ± 5 | ± 5 | ± 10005 | ± 5 | ± 5 | ± 10005 | ± 5 | ± 5 | ± 10005 | . | ±5 | ||||
| Стабильность смещения гироскопа TC (dps/°C) | ±0,053 (от -20°C до 75°C) | ±0,01 (от -40°C до 85°C) | ±0,01 (от -40°C до 85°C) | ±0,1 (от -40°C до 85°C) | ±0,01 ( от -40 °C до 85 °C) | ±0,1 МАКС. до 85°C) до 85°C) | ±0,04 (от -40°C до 85°C) | ±0,16 (от -40°C до 85°C) | ±0,24 (от -40°C до 85°C) |
|||||||||||||
| Погрешность чувствительности гироскопа (%) | ICG-20660: ±3% TYP ICG-20660L: ±1% МАКС. | ± 1% | ± 1% | ± 2% | ± 1% | ± 2% максимум | ± 0,5% | ± 0,5% | ± 2 | ± 3% | ± 3% | ± 2 | ± 3% | 9 ± 3%|||||||||
| Чувствительность гироскопа/температура (%/°C) | ICG-20660: ±0,032 (от -20°C до 75°C) ТИП. ICG-20660L: ±0,032 (от -20°C до 75°C) МАКС. | ±0,016 (от -40°C до 85°C) | ±0,016 (от -40°C до 85°C) | ± 0,024 (от -40°C до 85°C) | ±0,02 МАКС. (от -40°C до 85°C) | ±0,024 МАКС. (от -40°C до 85°C) | ±0,01 (от -40°C до 85°C) | ±0,016 (от -40°C до 85°C) | ±0,0004 ±0,016 (от -40°C до 85°C) | ±0,032 (от -40°C до 85°C) |
||||||||||||
| Чувствительность по перекрестной осевой осевой осевой осевой осевой % | ±2% | ±2% | ±2% | |||||||||||||||||||
| Gyro нелинейность (%) | ± 0,1% | ± 0,1% | ± 0,1% | ± 0,3% | ± 0,1% | ± 0,1% | ± 0,1% | ± 0,1% | ± 0,1% | ± 0,1% | ± 0,1% 9000 | ± 0,1% | 9± 0,1% 9000 | ± 0,1% | 9± 0,10009 | ± 0,1000 | ± 0,10009 | ± 0,1000 9000 | ± 0,10004 | ± 0,1000 9000 9000 40005 ±0,1% | ±0,2% | ±0,1% |
| Шум гироскопа (д/с/√Гц) | ICG-20660: 0,0065 ICG-20660L: 0,005 | 0,004 | 0,004 | 0,013 | 0,004 | 0,006 | 0,004 | 0,0175 | 0,006 | 0,004 | 0,0175 | 0,006 | 0005 | 0,005 | 0,01 | |||||||
| Скорость передачи данных гироскопии (Гц) | 1 кГц до 8 кГц | от 3,9 Гц до 8 кГц | от 3,9 Гц до 8 кГц | 3,9 Гц до 8KHZ | 3,9 Гц. | от 4,4 Гц до 9 кГц | от 3,9 Гц до 8 кГц | от 4 Гц до 8 кГц | от 4 Гц до 8 кГц | |||||||||||||
| Акселерометр | ||||||||||||||||||||||
| FSR (g) | ±2/4/8/16 | ±2/4/8/16 | ±2/4/8/16 | ±4/8/16/32 | ± 2/4/8/16 | ±2/4/8/16 | ±2/4/8/16 | ±4/8/16/30 | ±2/4/8/16 | ± 2/4/8/16 | ±2/4/8/16 | |||||||||||
| Ускорение ZGO (мг) | X/Y: ±40 Z: ±65 | ±40 | ±40 | ±60 | ±40 | ±100 МАКС. | ±40 | ±65 | ±20 | X/Y: ±50 Z: ±80 | ±60 | |||||||||||
| Смещение стабильности TC (мг/°C) | ±0,526 (от -20°C до 75°C) | X, Y: ±0,5, Z: ±1 (от -40°C до 85°C) C) | X, Y: ±0,5, Z: ±1 (от -40°C до 85°C) | X, Y: ±0,5, Z: ±1 (от -40°C до 85°C) | X, Y: ±0,5, Z: ±1 (от -40°C до 85°C) | ±1,5 (от -40°C до 85°C) | X, Y: ±0,5, Z: ±0,7 (от -40°C до 85°C) | ±0,8 (от 0°C до 85°C) | X, Y: ±0,5, Z: ±0,75 (от -40°C до 85°C) | X, Y: ±0,5, Z: ±0,75 0,86 (от -0°C до 70°C) | X, Y: ±0,64, Z: ±1 (от -40°C до 85°C) |
|||||||||||
| Ошибка чувствительности к ускорению (%) | ICG-20660: ±1% TYP
ICG-20660L: ±1% МАКС. | ±1% | ±1% | ±2% | ±1% | ±2% МАКС. | ±3% | ±3% | ||||||||||||||
| Чувствительность к ускорению/температура (%/°C) | ICG-20660: ±0,026 (от -20°C до 75°C) ТИП. ICG-20660L: ±0,026 (от -20°C до 75°C) МАКС. | ±0,012 (от -40°C до 85°C) | ±0,012 (от -40°C до 85°C) | ± 0,016 (от -40°C до 85°C) | ±0,016 МАКС. (от -40°C до 85°C) | ±0,016 МАКС. (от -40°C до 85°C) | ±0,008 ( от -40°C до 85°C) | ±0,0168 (от -40°C до 85°C) | ±0,008 (от -40°C до 85°C) | ±0,02 (от -40°C до 85°С) | ±0,026 (от -40°C до 85°C) |
|||||||||||
| Чувствительность к поперечной осевой осевой осев % | ±2% | ±2% | ±2% | |||||||||||||||||||
| Accel нелинейность (%) | ± 0,5% | ± 0,3% | ± 0,3% | ± 0,5% | ± 0,3% | ± 0,25% максимум | ± 0,3% | ± 0,25% | ± 0,3% 9000 | ± 0,25%. | ±0,5% | ±0,5% | ±0,5% | |||||||||
| Accel Noise (мкг/√hz) | 220 | 100 | 100 | 390 | 210 MAX | 100 | 285 | 150 | 9000 40059000 9000 9000 9000 4000 4000 4000 40009 9000 4000 4000 4000 4000 4000 4000 4000 4000 4000 4000 9000 4000 4000 40009 9000 4000 4000 4000 9000 4000 4000 4000 9000 9000 9000 40009 | 9000 4000 9000 9000 40009 9000 4000 9000 9000 9000 9000 9000 9000 9000 9000 9000 9000 40009285 | 150 9000 9000 40004 | |||||||||||
| Выходная скорость передачи данных Accel (Гц) | 4 Гц до 4 кГц | 3,9 Гц до 4 кГц | от 3,9 Гц до 4 кГц | 4 Гц до 4 кГц | 3,9 Гц до 4 кГц | 4 Гц. 4 кГц | от 3,91 Гц до 4 кГц | от 4,5 Гц до 4,5 кГц | от 4 Гц до 4 кГц | от 4 Гц до 1 кГц | от 4 Гц до 1 кГц | |||||||||||
| Общие | ||||||||||||||||||||||
| Интерфейс шины | SPI; I²C | SPI; I²C | SPI; I²C | SPI; I²C | SPI; I²C | SPI; I²C | SPI; I²C | SPI; I²C | СПИ; I²C | SPI; I²C | SPI; I²C | |||||||||||
| Поддержка FSYNC | Да | Да | Да | Да | Да | Да | Да | Да | Да | Да | Да | |||||||||||
| Память (FIFO) | 512 байтов | 1Kbytes | 1Kbytes | 512 байт | 1Kbytes | 4KBYTES | 1KBYTES | 4KBYTES | 1KBYTES | 4KBYTES | 1KBYTES 9000 | 4KBYTES | 00054 Кбайт | 1 Кбайт | 512 байт | |||||||
| Accel Current LP Mode | 57 мкА (@100 Гц) | 40 мкA (@100 Гц) | 40 мкA (@100 Гц) | (@57 мкA (@100 0 Гц) 90 90 Гц) | 57 мкА (@100 Гц) | 50 мкА (при 100 Гц) | 68,9 мкА (@102,3 Гц) | 57 мкА (при 100 Гц) | 10 мкА (@1,25 Гц) | 7,27,1, (@0,98 Гц) | ||||||||||||
| Режим LN тока гироскопа | 2,55 мА 1,08 мА (режим гироскопа LP при 100 Гц) | 2,55 мА 1,08 мА (режим гироскопа LP при 100 Гц) | 2,6 мА 1,6 мА (режим гироскопа LP при 100 Гц) | 2,55 мА 1,08 мА (режим гироскопа LP при 100 Гц) | 2,6 мА 1,6 мА (режим гироскопа LP при 100 Гц) | 2,55 мА 1,2 мА (режим гироскопа LP при 100 Гц) | 1,23 мА (режим гироскопа LP при 102,3 Гц) | 2,6 мА 1,6 мА (режим гироскопа LP при 100 Гц) | 3,6 мА | 3,2 мА | ||||||||||||
| Ток ускорения Режим LN | 0,32 мА | 0,32 мА | 0,39 мА | 0,32 мА | 0,39 мА | 0,33 мА | 68,9 мкА (режим Accel LP @102,3 Гц) | 0,39 мА | 500 | 9000.0,39 мА | 500 9000 9000 9000.40059 | 0,39 мА | 500 | |||||||||
| 6-осевой ток LN Mode | 3 MA | 2,79 MA 1,33 мА (Gyro LP @100HZ + Accel LN) | 2,79 мА 1,33 мА (Gyro LP @100HZ + Accel LN) | 325555555555555555555555555555555555555555555555555555555555555. 1,9 мА (гироскоп LP при 100 Гц + ускорение LN) | 2,79 мА 1,33 мА (гироскоп LP при 100 Гц + ускорение LN) | 3 мА 1,9 мА (гироскоп LP при 100 Гц + ускорение LN) | 2,7 мА 1,4 мА (гироскоп LP при 100 Гц + ускорение LN) | 1,27 мА (режим Gyro/Accel2.3 LP) 4 90 3 90 3 5 90 мА 1,9 мА (гироскоп LP при 100 Гц + Accel LN) | 3,8 мА | 3,4 мА | ||||||||||||
| DataSheet |
|
|
|
|
|
|
|
|
|
|
|
|
|
 DMP
DMP 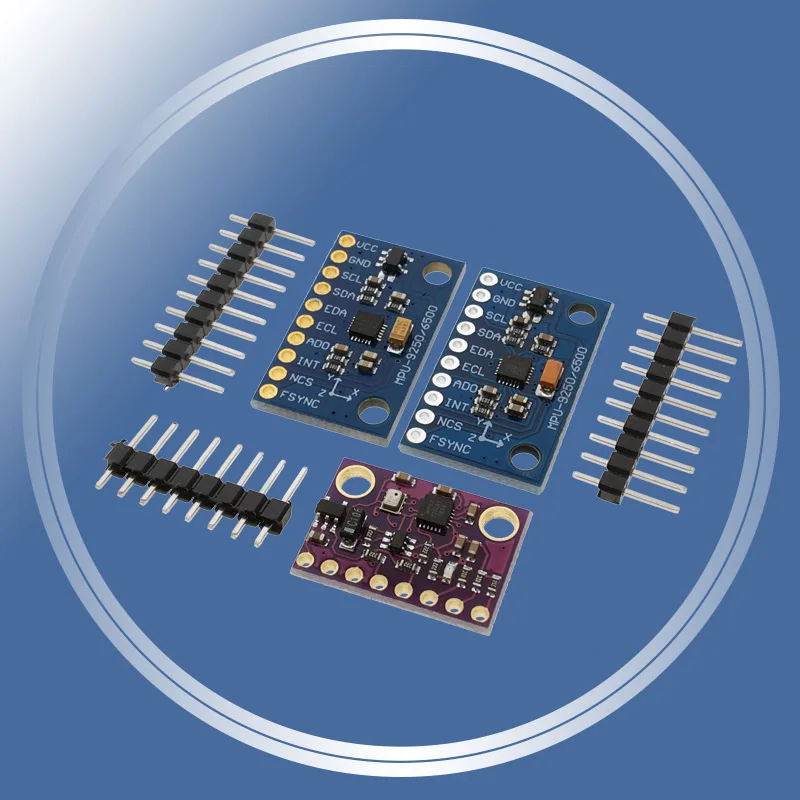 0.4559
0.4559 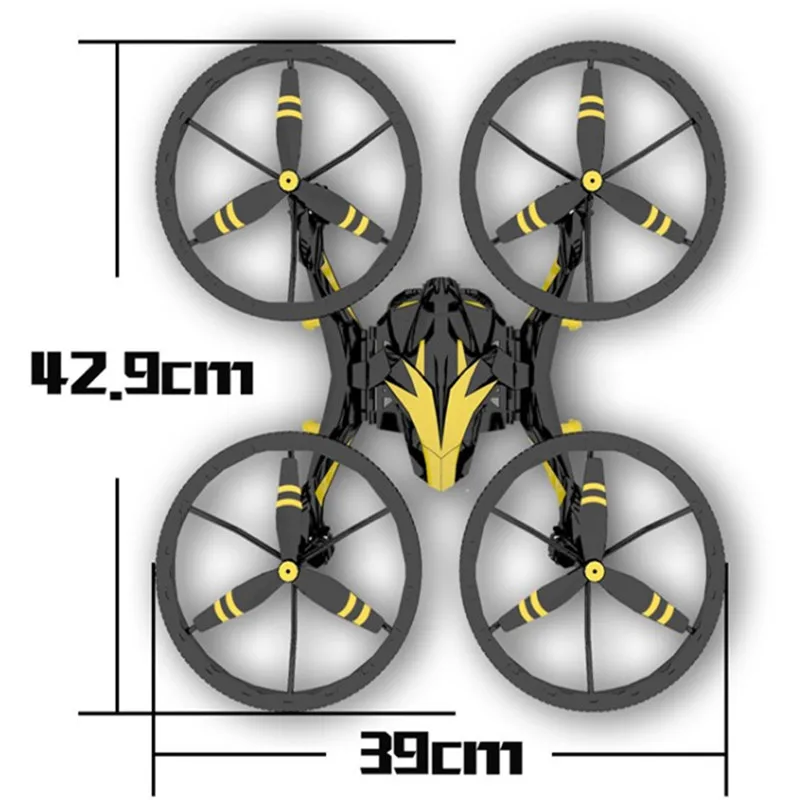 1158
1158 МПУ-6050 | ТДК
Документация
Приобретение
Приобретение EVB
Не рекомендуется для новых дизайнов
MPU-6050 Six-осевая (Gyro + Accelerometer) Mems MotionTracking ™ Devices
9006
. для низкого энергопотребления, низкой стоимости и высокой производительности смартфонов, планшетов и носимых датчиков.
Части MPU-6050 представляют собой шестиосевые устройства, разработанные для удовлетворения требований маломощных смартфонов, планшетов и носимых датчиков игроков онлайн-казино. Кроме того, MPU-6050 включает в себя InvenSense MotionFusion и прошивку для калибровки устройств игроков онлайн-казино с минимальным депозитом в 1 доллар США https://gamblizard.ca/deposit-bonuses/deposit-1/, что позволяет производителям отказаться от дорогостоящего и сложного выбора. Таким образом, устройство MotionTracking под названием MPU-6050 будет очень полезно для игроков онлайн-казино, которым необходимо недорогое устройство с высокой производительностью.
Кроме того, MPU-6050 включает в себя InvenSense MotionFusion и прошивку для калибровки устройств игроков онлайн-казино с минимальным депозитом в 1 доллар США https://gamblizard.ca/deposit-bonuses/deposit-1/, что позволяет производителям отказаться от дорогостоящего и сложного выбора. Таким образом, устройство MotionTracking под названием MPU-6050 будет очень полезно для игроков онлайн-казино, которым необходимо недорогое устройство с высокой производительностью.
MPU-6050 включает InvenSense MotionFusion™ и прошивку для калибровки во время выполнения, что позволяет производителям исключить дорогостоящий и сложный выбор, квалификацию и интеграцию дискретных устройств на системном уровне в продукты с поддержкой движения, гарантируя, что алгоритмы объединения датчиков и процедуры калибровки обеспечить оптимальную производительность для потребителей.
Акселерометры — это устройства, измеряющие ускорение, и они становятся все более популярными при регистрации в Zodiac Casino и в индустрии казино.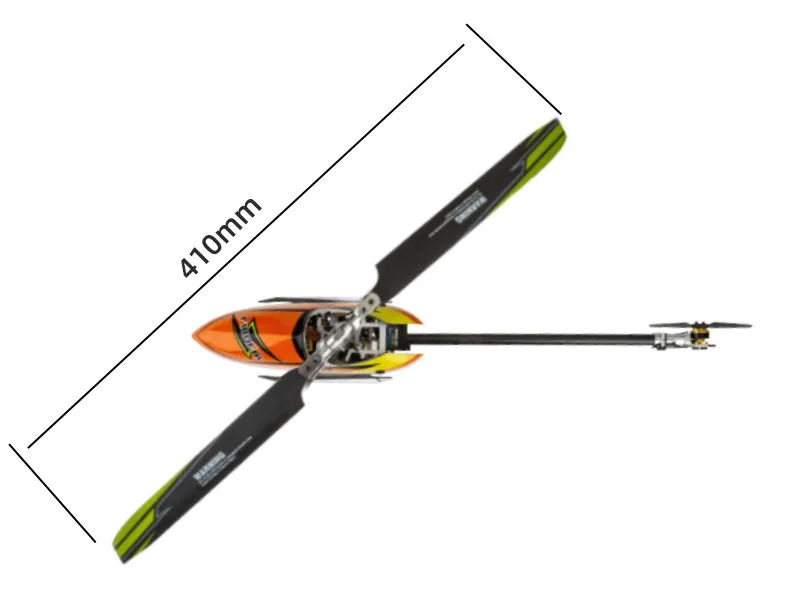 Они используются для отслеживания производительности игровых автоматов, выявления проблемных зон и повышения общей эффективности казино.
Они используются для отслеживания производительности игровых автоматов, выявления проблемных зон и повышения общей эффективности казино.
Акселерометры обычно представляют собой небольшие и легкие устройства, которые можно прикрепить практически к чему угодно. В случае с казино они обычно крепятся к нижней части игровых автоматов. Собранные ими данные затем передаются по беспроводной сети в центральное место, где их можно проанализировать.
Преимущества использования акселерометров многочисленны. Они позволяют казино в режиме реального времени получать представление о том, как работают их машины. Эта информация может быть использована для внесения необходимых корректировок и повышения общей эффективности казино. Кроме того, акселерометры могут помочь определить проблемные области, чтобы их можно было быстро и эффективно устранить.
Акселерометры — это устройства, измеряющие ускорение, и они все чаще используются в казино для повышения производительности. Измеряя ускорение, казино может отслеживать скорость и направление объектов, что полезно для таких вещей, как наблюдение за шариками рулетки и игровыми автоматами.
Акселерометры также можно использовать для обнаружения обмана или попытки украсть что-либо, а также для контроля толпы. В будущем акселерометры могут даже использоваться для предотвращения несчастных случаев, обнаруживая, когда кто-то падает или вот-вот поскользнется.
В целом, акселерометры предлагают множество преимуществ для казино и их клиентов. Используя эту технологию, казино могут стать более эффективными и лучше ловить преступников.
Гироскопы являются неотъемлемой частью работы многих казино. Понимая, как они работают и как их можно использовать для повышения производительности, казино может заставить своих клиентов возвращаться снова и снова.
Гироскопы — это устройства, которые измеряют или поддерживают скорость вращения. Они играют важную роль в обеспечении бесперебойной работы игрового оборудования казино. Без гироскопов колеса рулетки и игровых автоматов со временем замедлялись бы и останавливались.
Казино используют гироскопы для отслеживания скорости и направления вращения игрового оборудования. Эта информация используется, чтобы убедиться, что оборудование работает в допустимых пределах. Если проблема обнаружена, казино может предпринять корректирующие действия, прежде чем она станет более серьезной проблемой.
Эта информация используется, чтобы убедиться, что оборудование работает в допустимых пределах. Если проблема обнаружена, казино может предпринять корректирующие действия, прежде чем она станет более серьезной проблемой.
Гироскопы также можно использовать для повышения производительности игрового оборудования. Гироскопы являются одним из наиболее важных инструментов, которые казино используют для повышения производительности. Понимая, как они работают, казино может убедиться, что они обеспечивают наилучшие впечатления для своих гостей.
Гироскопы помогают казино отслеживать, где находятся гости в казино и как они перемещаются. Эта информация используется для улучшения потока трафика и обеспечения того, чтобы каждый мог безопасно передвигаться по казино. Кроме того, гироскопы можно использовать для контроля скорости игровых автоматов и других игровых устройств. Эту информацию можно использовать для корректировки выплат и обеспечения равных шансов на победу у всех.
Казино также используют гироскопы для создания виртуальной реальности для своих гостей. Отслеживая движение голов гостей, казино может создать реалистичную среду, погружающую гостей в игру.
Отслеживая движение голов гостей, казино может создать реалистичную среду, погружающую гостей в игру.
Устройства MPU-6050 сочетают в себе 3-осевой гироскоп и 3-осевой акселерометр на одном кремниевом кристалле вместе со встроенным процессором Digital Motion Processor™ (DMP™), который обрабатывает сложные 6-осевые алгоритмы MotionFusion. Устройство может получить доступ к внешним магнитометрам или другим датчикам через вспомогательную главную шину I²C, что позволяет устройствам собирать полный набор данных датчиков без вмешательства системного процессора. Устройства предлагаются в корпусе QFN размером 4 мм x 4 мм x 0,9 мм.
Платформа InvenSense MotionApps™, поставляемая с MPU-6050, абстрагирует сложности, связанные с движением, выгружает управление датчиками из операционной системы и предоставляет структурированный набор API-интерфейсов для разработки приложений.
Для точного отслеживания как быстрых, так и медленных движений детали оснащены программируемым пользователем диапазоном полной шкалы гироскопа ±250, ±500, ±1000 и ±2000 °/с (dps) и программируемым пользователем акселерометром.