Что такое абсолютный энкодер. Как работает абсолютный энкодер. Чем отличается абсолютный энкодер от инкрементного. Какие бывают типы абсолютных энкодеров. Где применяются абсолютные энкодеры.
Что такое абсолютный энкодер и как он работает
Абсолютный энкодер — это устройство, которое преобразует угловое положение вала в уникальный цифровой код. В отличие от инкрементного энкодера, абсолютный энкодер генерирует уникальный код для каждого углового положения вала, даже когда вал неподвижен.
Принцип работы абсолютного энкодера основан на использовании кодового диска с несколькими концентрическими дорожками. Каждая дорожка содержит уникальную комбинацию прозрачных и непрозрачных участков, формирующих двоичный код для определенного углового положения. При вращении вала оптические датчики считывают код с диска и преобразуют его в цифровой сигнал.
Преимущества абсолютных энкодеров
Абсолютные энкодеры имеют ряд важных преимуществ по сравнению с инкрементными:

- Выдают абсолютное значение положения без необходимости отсчета от начальной точки
- Сохраняют информацию о положении при отключении питания
- Не требуют возврата в исходное положение при включении
- Устойчивы к помехам и вибрациям
- Высокая точность измерения положения
Типы кодирования в абсолютных энкодерах
В абсолютных энкодерах используются различные типы кодирования для представления углового положения:
Двоичный код
Простейший тип кодирования, где каждое положение представлено уникальной комбинацией нулей и единиц. Однако при переходе между соседними положениями могут меняться сразу несколько бит, что может привести к ошибкам считывания.
Код Грея
Циклический код, в котором при переходе между соседними положениями меняется только один бит. Это обеспечивает высокую помехоустойчивость и точность считывания положения. Код Грея широко применяется в современных абсолютных энкодерах.
Основные типы абсолютных энкодеров
Абсолютные энкодеры можно разделить на несколько основных типов:

Однооборотные энкодеры
Измеряют угловое положение в пределах одного оборота (0-360°). После полного оборота показания возвращаются к нулю. Применяются в системах, где не требуется отслеживать количество оборотов.
Многооборотные энкодеры
Способны измерять как угловое положение, так и количество полных оборотов вала. Это позволяет отслеживать абсолютное положение в системах с неограниченным вращением. Многооборотные энкодеры используют различные технологии для подсчета оборотов:
- Механические редукторы
- Электронные счетчики с резервным питанием
- Магнитные датчики на основе эффекта Виганда
Оптические и магнитные абсолютные энкодеры
По принципу считывания положения абсолютные энкодеры делятся на два основных типа:
Оптические энкодеры
Используют кодовый диск с прозрачными и непрозрачными участками. Положение определяется с помощью светодиодов и фотодетекторов. Обеспечивают высокую точность, но чувствительны к загрязнениям.
Магнитные энкодеры
Применяют магнитный ротор и датчики Холла для определения положения. Более устойчивы к внешним воздействиям, но обычно имеют меньшую точность по сравнению с оптическими.
Области применения абсолютных энкодеров
Абсолютные энкодеры широко используются в различных отраслях промышленности и техники:
- Робототехника и автоматизация производства
- Станки с ЧПУ и обрабатывающие центры
- Антенные системы и телескопы
- Лифты и подъемные механизмы
- Упаковочное и печатное оборудование
- Медицинская техника (томографы, хирургические роботы)
- Системы позиционирования в автомобильной и аэрокосмической отраслях
Как выбрать абсолютный энкодер
При выборе абсолютного энкодера следует учитывать несколько ключевых параметров:
- Разрешение (количество уникальных положений на оборот)
- Тип выходного сигнала (параллельный, последовательный, аналоговый)
- Количество оборотов для многооборотных энкодеров
- Механические характеристики (размер, тип вала, степень защиты)
- Условия эксплуатации (температура, влажность, вибрации)
- Требуемая точность и скорость обновления данных
Интерфейсы абсолютных энкодеров
Современные абсолютные энкодеры поддерживают различные интерфейсы для передачи данных:

- Параллельный интерфейс — для высокоскоростной передачи данных на короткие расстояния
- Последовательные интерфейсы (SSI, BiSS, EnDat) — для передачи на большие расстояния
- Промышленные сети (Profibus, CANopen, EtherCAT) — для интеграции в системы автоматизации
- Аналоговый выход (напряжение или ток) — для простых применений
Сравнение абсолютных и инкрементных энкодеров
Основные различия между абсолютными и инкрементными энкодерами:
| Характеристика | Абсолютный энкодер | Инкрементный энкодер |
|---|---|---|
| Выходной сигнал | Уникальный код для каждого положения | Импульсы при вращении |
| Определение положения | Мгновенное, даже при неподвижном вале | Требует подсчета импульсов от начальной точки |
| Сохранение позиции при отключении питания | Да | Нет |
| Стоимость | Выше | Ниже |
| Сложность обработки сигнала | Выше | Ниже |
Заключение
Абсолютные энкодеры являются незаменимыми устройствами в системах, требующих точного определения положения без необходимости возврата в исходную точку. Несмотря на более высокую стоимость по сравнению с инкрементными энкодерами, они обеспечивают надежность и точность в критически важных приложениях. С развитием технологий абсолютные энкодеры становятся все более доступными и находят применение в новых областях промышленности и техники.

Абсолютный поворотный энкодер — OMCH
Энкодер — это электромеханическое устройство, используемое для контроля вращающихся объектов, таких как валы и оси. Датчики вращения могут использоваться для измерения положения, расстояния и угловой скорости вращающегося вала.
Есть два типа поворотных энкодеров: инкрементальные поворотные энкодеры и абсолютные угловые энкодеры. В этой статье мы рассмотрим абсолютные угловые энкодеры, принцип их работы и применение.
Что такое абсолютный поворотный энкодер?
Абсолютные угловые энкодеры относятся к семейству поворотные энкодеры. Они используются для измерения следующих параметров вращающихся объектов, таких как валы или оси:
- Угловая скорость
- Информация о позиции
- Расстояние
Абсолютные угловые энкодеры используются в приложениях, где требуется точное измерение положения и углового смещения. Эти датчики также находят свое применение в системах, где необходимо измерять скорость вращения.
Эти датчики выдают уникальное слово (слово — это
Это отличается от инкрементальных поворотных энкодеров, поскольку инкрементальные энкодеры предназначены для вывода непрерывный поток повсеместных импульсов в то время как абсолютные энкодеры выводят уникальный набор бит для каждой позиции датчика.
Это позволяет нам измерить точное (абсолютное) положение вала, а не рассчитывать смена позиции.
Давайте подробно рассмотрим, как работают абсолютные угловые энкодеры.
Принцип работы абсолютного поворотного энкодера
Абсолютные угловые энкодеры по сравнению с инкрементальными угловыми энкодерами несколько сложны в эксплуатации, но просты в применении.
Подобно инкрементальным угловым энкодерам, абсолютные энкодеры также имеют вращающийся вал, прикрепленный к датчику. Вал соединяется с диском с тщательно размещенным набором пазов. Это колесо также известно как «кодовое колесо».
Колесо кодирования имеет уникальный битовый шаблон. В отличие от инкрементальных кодировщиков, где все слоты размещены в повторяющемся шаблоне, слоты кодового колеса абсолютного кодировщика отличаются друг от друга.
Когда вал вращается, кодовое колесо также вращается вместе с ним. Есть набор светодиодов, которые излучают лучи света на кодовое колесо. Когда лучи света совпадают с прорезями, лучи проходят через кодовое колесо, фиксированную прорезь, и освещают фототранзисторы.
Существуют магнитные абсолютные энкодеры, которые заменяют светодиодную матрицу на магнитную чувствительную матрицу и набор магнитных полюсов, заменяющих оптические маркеры.
Каждый фототранзистор работает независимо и при включении выдает логический ВЫСОКИЙ сигнал. Когда на конкретном фототранзисторе нет луча, он выдает логический низкий уровень.
Количество фототранзисторов и уровней прорезей, выгравированных на кодовом колесе, определяет точность и разрешение абсолютного углового энкодера.
Обычно об этом говорится в биты. Например, абсолютный энкодер с разрешением 8 бит может предоставить информацию о 256 положениях и может измерять угловые смещения с шагом 1.41 градуса.
В зависимости от типа абсолютного энкодера и его конструкции доступны несколько конфигураций выходов:
- Параллельный выход
- Этот тип датчика имеет несколько выходных линий, которые предоставляют информацию о местоположении. Например, 8-битный датчик с параллельным выходом имеет 8 сигнальных линий и два провода питания. Вывод может быть закодирован в двоичный or серый код формат.
- Датчики с параллельным выходом имеют минимальное количество встроенных схем, так как не требуют большой обработки.
- Последовательный выход
- Абсолютные энкодеры с последовательным выходом выводят информацию о положении и скорости через протокол синхронной передачи данных.

- Абсолютные энкодеры с последовательным выходом выводят информацию о положении и скорости через протокол синхронной передачи данных.
- Датчики с последовательным выходом имеют линии данных и тактовых импульсов и выводят один бит на каждый тактовый импульс. Эти датчики также бывают в двоичном формате или в выходном формате с серым кодом.
- Для дополнительной помехоустойчивости датчики с последовательным выходом используют связь по дифференциальной паре в соответствии с Стандарт RS-422. Одна пара на такт и другая для линий данных.
- Наиболее популярные методы синхронной связи для абсолютных энкодеров: SSI: синхронный последовательный интерфейс, BiSS: двунаправленный синхронный последовательный интерфейс и Hiperface DSL.
- Аналоговый вывод
- Датчики с аналоговым выходом выдают значение напряжения или тока в зависимости от положения датчика.
Преимущества абсолютных энкодеров
Абсолютные энкодеры, хотя и стоят немного дороже, имеют несколько преимуществ с точки зрения определения положения:
- Выводит абсолютное положение вала.

- При «опросе» абсолютные энкодеры выводят уникальную информацию о положении, относящуюся к его текущему положению. Это означает, что никакие два положения вала при вращении на 360 градусов не совпадают.
- Несколько вариантов вывода
- Абсолютные энкодеры имеют несколько типов вывода: параллельный, последовательный (стандартные и проприетарные протоколы)
- Невосприимчивость к сбоям питания
- Абсолютные энкодеры не страдают от сбоев питания. Они всегда готовы предоставить информацию о местоположении сразу после отключения питания.
- Высокая разрешающая способность
- Путем простого увеличения количества дорожек энкодера и датчиков абсолютные энкодеры могут иметь гораздо более высокое разрешение, чем инкрементальные энкодеры.
Инкрементальные и абсолютные энкодеры
Основное различие между абсолютным и инкрементным энкодерами заключается в их работе. Абсолютные энкодеры могут предоставлять информацию о положении, даже если вал не вращается.
Абсолютные энкодеры могут предоставлять информацию о положении, даже если вал не вращается.
Инкрементальные энкодеры могут выдавать импульсы только при вращении вала. Для определения относительного положения и расстояния необходимо провести отдельный подсчет импульсов.
Инкрементальные энкодеры должны иметь отдельный маркер «начала отсчета» для определения исходного / исходного положения вала. Однако абсолютные энкодеры не нуждаются в таком добавлении и могут обеспечить немедленное положение вала.
Это может быть очень полезно в тех случаях, когда вращение вала для достижения «исходного» положения нежелательно.
Для инкрементальных энкодеров требуются специальные модули высокоскоростных декодеров для получения информации о скорости, положении и расстоянии. Это ограничивает интеграцию с электронными устройствами, отличными от ПЛК и микроконтроллеров. Иногда накладные расходы на обработку также могут отрицательно сказаться на производительности системы.
Абсолютные датчики имеют более высокое общее разрешение, чем инкрементные аналоги. Разрешение инкрементальных энкодеров ограничено физическим размером диска и частотной характеристикой системы.
Разрешение инкрементальных энкодеров ограничено физическим размером диска и частотной характеристикой системы.
Абсолютные энкодеры всегда готовы предоставить информацию о положении по запросу, в то время как инкрементальные энкодеры необходимо постоянно контролировать, чтобы получить последовательность импульсов и вычислить текущую скорость, направление и расстояние. Благодаря этому абсолютные энкодеры могут легко восстанавливаться после сбоев питания.
Абсолютные энкодеры
Абсолютные энкодеры в основном используются в приложениях высокоточного позиционирования, таких как,
- Многоосные станки с ЧПУ (сборка и изготовление)
- Роботы-манипуляторы (хирургические роботы, диагностическая визуализация)
- Система позиционирования лифтов
- Приложения для печати
- Индустрия автоспорта (электронные системы управления) и многое другое.
Абсолютный выход энкодера
Абсолютные энкодеры выводят набор битов, называемых «словом» для каждого положения вала. Есть три типа выходов для абсолютных энкодеров: параллельный, последовательный и аналоговый.
Есть три типа выходов для абсолютных энкодеров: параллельный, последовательный и аналоговый.
Энкодеры с параллельным выходом имеют n-количество проводов (n = количество бит (разрешение)), выводящих соответствующие биты слова. На приведенном ниже рисунке показан выход абсолютного энкодера с 6-битным словом. Выходное слово может быть серый код or двоичный формат.
Кодеры последовательного вывода выводят поток данных при «опросе». Датчик имеет встроенную схему обработки сигналов на базе микроконтроллера. Существуют системы последовательной шины, такие как SSI, BiSS, EnDat, Modbus и Profibus, которые позволяют поддерживаемому устройству связываться с датчиком.
Датчики с аналоговым выходом выдают сигнал напряжения или тока в зависимости от положения датчика.
Типы абсолютных энкодеров
Абсолютные энкодеры можно классифицировать на основе сенсорной технологии как оптический и магнитный. Оптические кодировщики используют видимый свет (светодиоды) и кодовое колесо с прорезями.
Магнитные энкодеры используют магнитные полюса и магнитная сенсорная матрица чтобы получить текущую позицию колеса кодирования.
Другая классификация основана на типе вывода. Есть однооборотные и многооборотные абсолютные энкодеры. Однооборотные абсолютные энкодеры могут предоставлять информацию о местоположении только за один поворот на 260 градусов.
Многооборотные энкодеры предоставляют дополнительные данные о количестве оборотов вала на 360 градусов. Это помогает определить количество оборотов без необходимости считать с самого начала.
Однооборотные и многооборотные абсолютные энкодеры
В зависимости от наличия специальной функции для подсчета оборотов существует два типа абсолютных энкодеров: Однооборотные и многооборотные абсолютные энкодеры.
Однооборотные абсолютные энкодеры могут измерять положение за один оборот.
Например, если однооборотный абсолютный энкодер поворачивается на 360 градусов от своего исходного положения и достигает 361-го градуса вращения, датчик начнет вывод данных с начала. Он укажет положение как 1 градус.
Он укажет положение как 1 градус.
Эти датчики не могут подсчитывать или выдавать специальный сигнал, когда вращение превышает полный оборот. Например, Датчики серии 845G от Аллена Брэдли иметь 12-битный вывод, 0 как минимум и 4095 как максимальное положение. Как только он достигает 4096, выход достигает 0.
Однооборотные абсолютные энкодеры используются в таких приложениях, как:
- Телескопы
- Вращающиеся антенны
- Генераторы ветряных турбин
- Ворота / Двери
В однооборотных энкодерах отсутствует функция подсчета оборотов, и их можно использовать для измерения скорости и положения. При необходимости исходное положение можно использовать в качестве ориентира, а программный метод можно использовать для подсчета приблизительного количества оборотов.
С другой стороны, многооборотные абсолютные энкодеры также могут считать обороты. Например, 12-битный многооборотный абсолютный энкодер имеет 4096 шагов на оборот, а также может считать 4096 оборотов. В многооборотных энкодерах используется одна из следующих технологий для сохранения числа оборотов:
В многооборотных энкодерах используется одна из следующих технологий для сохранения числа оборотов:
- Тип редуктора
- Энкодеры с редуктором используют набор планетарных шестерен для отслеживания количества оборотов. Недостатком этих типов является механический износ со временем.
- Тип резервного аккумулятора
- Этот тип использует электронный счетчик и память для хранения информации счетчика. Они могут считать обороты даже в выключенном состоянии. Однако в большинстве случаев аккумулятор встроен в датчик. Время от времени может потребоваться его замена, в зависимости от частоты использования.
- Тип датчика Wiegand
- Виганд-проволочные датчики используют специальный провод, намотанный рядом с валом, и используют магнитный импульс, чтобы вызвать изменение полярности. Это изменение происходит после каждого завершенного оборота. Это переключение используется для подсчета количества оборотов.

- Виганд-проволочные датчики используют специальный провод, намотанный рядом с валом, и используют магнитный импульс, чтобы вызвать изменение полярности. Это изменение происходит после каждого завершенного оборота. Это переключение используется для подсчета количества оборотов.
Многооборотные энкодеры используются в таких приложениях, как,
- Роботизированные суставы
- Краны
- Сервомоторы (360 сервоприводов)
- Системы управления спутниковыми антеннами и многое другое, где точка поворота недоступна / недоступна.
Что такое магнитный абсолютный энкодер?
В магнитных абсолютных энкодерах используются магнитные полюса и магнитные датчики вместо светодиодов и фотодиодов, используемых в оптических энкодерах. На изображении ниже показан пример колеса магнитного кодировщика с абсолютным кодом.
Устройство внешнего полюса имеет на один магнитный полюс больше, чем внутреннее устройство. Это приводит к однозначному смещению внутренней и внешней пар полюсов.
Датчики принимают сигналы от одного полюса на колесо за раз и вычисляют их разность фаз (фазовый сдвиг). Эта аналоговая разность фаз затем преобразуется в цифровое значение для вывода.
Магнитные энкодеры очень прочны и устойчивы к ударам и вибрации.
Они находят свое применение в средах, где могут накапливаться твердые загрязнители, такие как пыль, влага и другие частицы материала. Однако из-за своего принципа действия магнитные энкодеры чувствительны к сбоям, вызванным сильными магнитными полями.
Взаимодействие абсолютного кодировщика с Raspberry Pi
Хотя подключение абсолютного энкодера к Raspberry Pi может быть простым, программа для правильного чтения входов может немного усложниться в зависимости от типа датчика. Давайте посмотрим, как взаимодействовать с абсолютным энкодером с последовательным выходом (ЭМС22А) с Raspberry Pi.
Подключение датчика
Датчик имеет следующий формат подключения:
Подключите провода датчика к Raspberry Pi следующим образом:
- Контакт 2 (CLK) -> контакт 2 RPi
- Контакт 4 (DO) -> контакт 3 RPi (при использовании более одного датчика подключите контакт данных второго датчика к контакту 14)
- Контакт 6 (CS) -> контакт 4 RPi
- VCC -> контакт RPi + 5V
- GND -> контакт RPi GND
Пример кода
Чтобы получить информацию от датчика, следующий пример кода, написанный ХарешКарнан может быть использован. При выполнении он распечатает показания подключенного датчика.
При выполнении он распечатает показания подключенного датчика.
import time
import RPi.GPIO as GPIO
GPIO.setmode(GPIO.BCM)
PIN_CLK = 2
PIN_DAT = [3,14]
PIN_CS = 4
delay = 0.0000005
ns = 2 # number of sensors attached
# totally 10 bits to be extracted from SSI signal
bitcount = 16
# pin setup done here
try:
GPIO.setup(PIN_CLK,GPIO.OUT)
GPIO.setup(PIN_DAT[:],GPIO.IN)
GPIO.setup(PIN_CS,GPIO.OUT)
GPIO.output(PIN_CS,1)
GPIO.output(PIN_CLK,1)
except:
print «ERROR. Unable to setup the configuration requested»
#wait some time to start
time.sleep(0.5)
print «GPIO configuration enabled»
def clockup():
GPIO.output(PIN_CLK,1)
def clockdown():
GPIO.output(PIN_CLK,0)
def MSB():
# Most Significant Bit
clockdown()
def readpos():
GPIO. output(PIN_CS,0)
output(PIN_CS,0)
time.sleep(delay*2)
MSB()
data = [0]*ns
for i in range(0,bitcount):
if i<10:
#print i
clockup()
for j in range(0,ns):
data[j]<<=1
data[j]|=GPIO.input(PIN_DAT[j])
clockdown()
else:
for k in range(0,6):
clockup()
clockdown()
GPIO.output(PIN_CS,1)
return data
try:
while(1):
print readpos()
time.sleep(0.001)
#break
finally:
print «cleaning up GPIO»
GPIO.cleanup()
Цена абсолютного кодировщика
Стоимость абсолютных энкодеров колеблется от 10-15 до 1000 долларов. В основном это связано с доступными функциями, разрешением, типом вывода и используемым протоколом. Запатентованные датчики с высоким разрешением обычно стоят дороже, чем простые датчики с параллельным выходом, которые можно купить по более низкой цене.
Заключение
Датчики вращения используются для отслеживания вращающихся механических компонентов, таких как валы и стержни. Абсолютные энкодеры и инкрементальные энкодеры — это два типа угловых энкодеров.
Существуют специальные устройства интерфейса энкодера, которые могут считывать необработанные входные данные углового энкодера и выводить информацию о скорости, положении и расстоянии на компьютер.
Поддерживаемые кодировщики также могут быть напрямую подключены к ПЛК и другим компьютерам для получения необработанных значений и выполнения расчетов в программном обеспечении.
Принцип работы абсолютного энкодера |
Нашли ошибку? Сообщите нам |
|||||||||||||||||||||||||||||||||
|
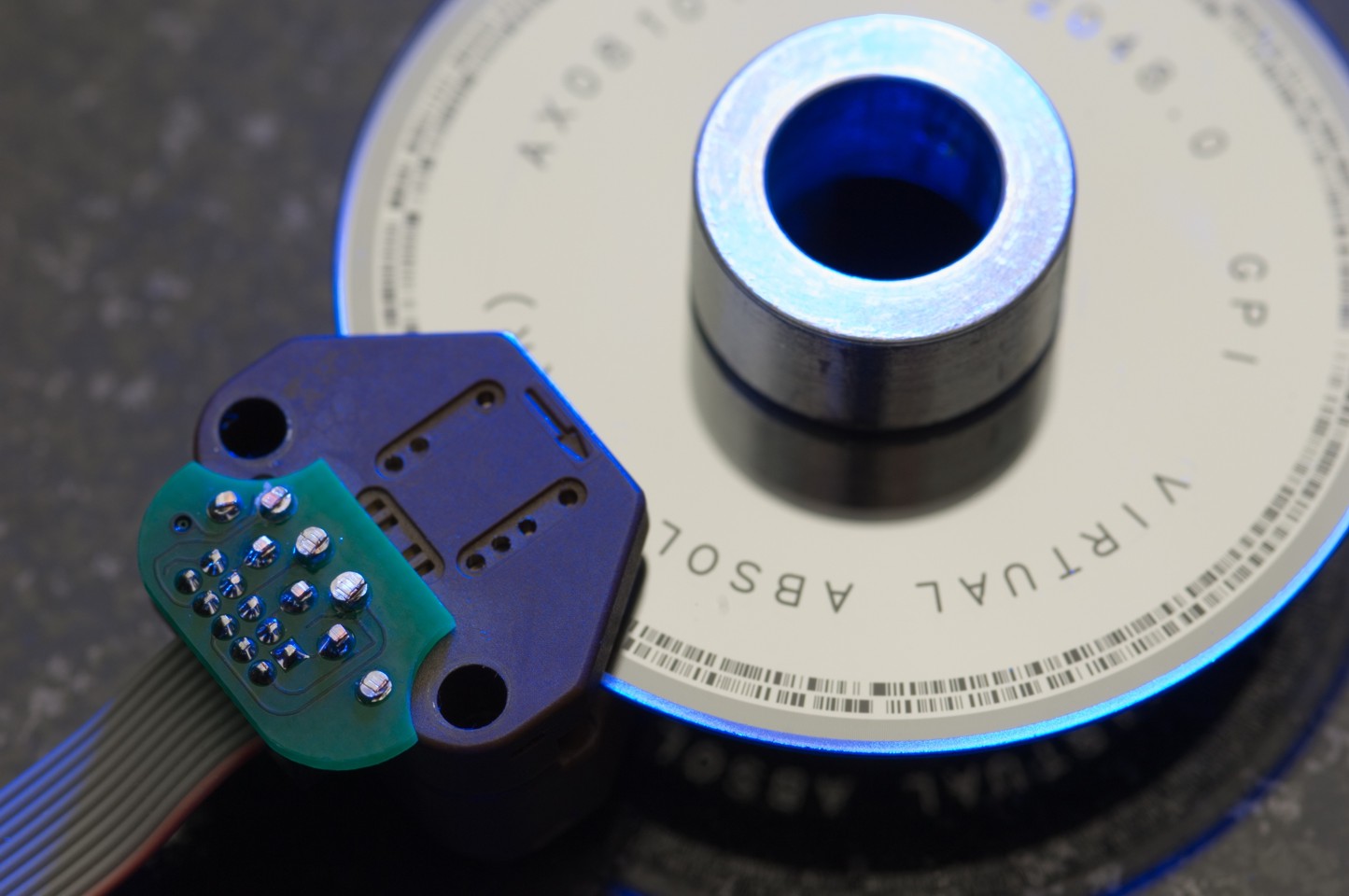
Абсолютный энкодер относится к типу энкодеров, который выполняет уникальный код для каждой позиции вала.
Кодовый диск абсолютного энкодера Абсолютный энкодер не теряет своего значения при потере питания и не требует возвращения в начальную позицию. Сигнал абсолютного энкодера не подвержен помехам и для него не требуется точная установка вала. Кроме того, даже если кодированный сигнал не может быть прочитан энкодером, если, например, вал вращается слишком быстро, правильный угол вращения будет зарегистрирован, когда скорость вращения уменьшится. Абсолютный энкодер устойчив к вибрациям. Двоичный код
Двоичный код — это широкораспространенный код, который может обрабатываться непосредственно микропроцессором и является основным кодом для обработки цифровых сигналов. Построение ДК осуществляется по следующему принципу:
Таким образом выглядит в данном случае число 10 в двоичном коде. Наибольшее число, которое может быть выражено двоичным кодом, зависит от количества используемых разрядов, т.е. от количества битов в комбинации, выражающей число. Например, для выражения числовых значений от 0 до 7 достаточно иметь 3-разрядный или 3-битовый код:
Отсюда видно, что для числа больше 7 при 3-разрядном коде уже нет кодовых комбинаций из 0 и 1.
Двоичный код является многошаговым кодом. Это означает, что при переходе с одного положения (значения) в другое могут изменяться несколько бит одновременно. Например, число 3 в двоичном коде = 011. Число же 4 в двоичном коде = 100. Соответственно, при переходе от 3 к 4 меняют свое состояние на противоположное все 3 бита одновременно. Считывание такого кода с кодового диска привело бы к тому, что из-за неизбежных отклонений (толеранцев) при производстве кодового диска изменение информации от каждой из дорожек в отдельности никогда не произойдет одновременно. Это, в свою очередь, привело бы к тому, что при переходе от одного числа к другому кратковременно будет выдана неверная информация. Код Грея
Код Грея предпочтительнее обычного двоичного тем, что обладает свойством непрерывности бинарной комбинации: изменение кодируемого числа на единицу соответствует изменению кодовой комбинации только в одном разряде. Он строится на базе двоичного по следующему правилу: старший разряд остается без изменения; каждый последующий разряд инвертируется, если предыдущий разряд исходного двоичного кода равен единице. Этот алгоритм построения может быть формально представлен как результат сложения по модулю два исходной комбинации двоичного кода с такой же комбинацией, но сдвинутой на один разряд вправо. Таким образом, Грей-код является так называемым одношаговым кодом, т.к. при переходе от одного числа к другому всегда меняется лишь какой-то один бит. Погрешность при считывании информации с механического кодового диска при переходе от одного числа к другому приведет лишь к тому, что переход от одного положения к другом будет лишь несколько смещен по времени, однако выдача совершенно неверного значения углового положения при переходе от одного положения к другому полностью исключается.
Преимуществом Грей-кода является также его способность зеркального отображения информации. Так, инвертируя старший бит можно простым образом менять направление счета и, таким образом, подбирать к фактическому (физическому) направлению вращения оси. Изменение направления счета может легко изменяться, управляя так называемым входом » Complement «. Выдаваемое значение может быть возрастающим или спадающим при одном и том же физическом направлении вращения оси. Поскольку информация, выраженная в Грей-коде, имеет чисто кодированный характер не несущей реальной числовой информации, должен он перед дальнейшей обработкой сперва преобразован в стандартный бинарный код. Осуществляется это при помощи преобразователя кода (декодера Грей-Бинар), который к счастью легко реализируется с помощью цепи из логических элементов «исключающее или» ( XOR ) как программным, так и аппаратным способом (см. схему ниже). Из таблицы видно, что при переходе от одного числа к другому (соседнему) лишь один бит информации меняет свое состояние, если число представлено кодом Грея, в то время, как в двоичном коде могут поменять свое состояние несколько бит одновременно. Код Грея — выход, следовательно, он никогда не имеет ошибку чтения и применяется во многих абсолютных энкодерах.
Биты меняющие свое состояние, при переходе от одного числа к другому, обозначены красным цветом. Используйте такую схему для преобразования Кода Грея в двоичный код.
Примечание: *Код Грея может логически преобразовываться в двоичный код когда терминал Vin подключается к 0 V. **Инвертор Gray-Excess-Code
Обычный одношаговый Грей-код подходит для разрешений, которые могут быть представлены в виде числа возведенного в степень 2. В случаях, где надо реализовать другие разрешения из обычного Грей-кода, вырезается и используется средний его участок. Таким образом, сохраняется «одношаговость» кода. Однако числовой диапазон начинается не с нуля, а смещяется на определенное значение. При обработке информации от генерируемого сигнала отнимается половина разницы между первоначальным и редуцированным разрешением. Такие разрешения как, например, 360° для выражения угла часто реализируются этим методом. Так 9-ти битный Грей-код равный 512 шагов, урезанный с обеих сторон на 76 шагов будет равен 360°. |
||||||||||||||||||||||||||||||||||
 В отличие от инкрементного энкодера, счетчик импульсов не нужен, т.к. угол поворота всегда известен. Абсолютный энкодер формирует сигнал как во время вращения, так и в режиме покоя. Диск абсолютного энкодера отличается от диска пошагового энкодера, так как имеет несколько концентрических дорожек. Каждой дорожкой формируется уникальный двоичный код для конкретной позиции вала.
В отличие от инкрементного энкодера, счетчик импульсов не нужен, т.к. угол поворота всегда известен. Абсолютный энкодер формирует сигнал как во время вращения, так и в режиме покоя. Диск абсолютного энкодера отличается от диска пошагового энкодера, так как имеет несколько концентрических дорожек. Каждой дорожкой формируется уникальный двоичный код для конкретной позиции вала.
 Двоичный код состоит только из 0 и 1.
Двоичный код состоит только из 0 и 1.
 Переходя от чисел к физическим величинам сформулируем вышеприведенное утверждение в более общем виде: наибольшее количество значений m какой-либо величины (угла поворота, напряжения, тока и др.), которое может быть выражено двоичным кодом, зависит от числа используемых разрядов n как m =2 n . Если n =3, как в рассмотренном примере, то получим 8 значений, включая ведущий 0.
Переходя от чисел к физическим величинам сформулируем вышеприведенное утверждение в более общем виде: наибольшее количество значений m какой-либо величины (угла поворота, напряжения, тока и др.), которое может быть выражено двоичным кодом, зависит от числа используемых разрядов n как m =2 n . Если n =3, как в рассмотренном примере, то получим 8 значений, включая ведущий 0.
 Так при вышеупомянутом переходе от числа 3 к числу 4 очень вероятна кратковременная выдача числа 7, когда, например, старший бит во время перехода поменял свое значение немного раньше чем остальные. Таким образом, использование обычного двоичного кода может привести к большим погрешностям, так как две соседние кодовые комбинации могут отличаться друг от друга не в одном, а в нескольких разрядах. Чтобы избежать этого применяется так называемый одношаговый код, например, так называемый Грей-код.
Так при вышеупомянутом переходе от числа 3 к числу 4 очень вероятна кратковременная выдача числа 7, когда, например, старший бит во время перехода поменял свое значение немного раньше чем остальные. Таким образом, использование обычного двоичного кода может привести к большим погрешностям, так как две соседние кодовые комбинации могут отличаться друг от друга не в одном, а в нескольких разрядах. Чтобы избежать этого применяется так называемый одношаговый код, например, так называемый Грей-код.
 При этом крайний правый разряд сдвинутой комбинации отбрасывается.
При этом крайний правый разряд сдвинутой комбинации отбрасывается.


Разница между инкрементальными и абсолютными энкодерами
Абсолютный энкодер может сообщить вам точное положение вала при его вращении в любой момент времени (и сколько оборотов произошло на многооборотном абсолютном энкодере). Инкрементальный энкодер может сообщать только об изменении положения.
Может показаться, что разница невелика, но день и ночь, если в системе произошел сбой питания.
После восстановления питания абсолютный энкодер может сообщить точное положение без движения. Инкрементному кодировщику нужно будет найти индекс или исходную позицию, прежде чем он сможет это сделать, а если у него нет индекса, он вообще не сможет сообщить вам свою позицию.
Давайте разберемся почему, поговорив о том, как работают оба типа энкодеров.
Как работают инкрементальные энкодеры
Наши инкрементальные оптические энкодеры, светодиод, чип фотодетектора и фигурный диск для определения положения вала.
Наши инкрементальные энкодеры имеют светодиод на одной стороне прозрачного диска и чип фотодетектора на другой. На диске есть ряд строк и окон. Окна позволяют передавать свет от светодиода к чипу. Линии нет. Эта чередующаяся картина света — это то, как энкодер сообщает информацию о местоположении механической системе.
Каждый набор линий и окон выглядит одинаково. Инкрементальные энкодеры могут определять относительное положение вала на основе количества окон и линий, проходящих перед чипом детектора. Если власть теряется, а затем восстанавливается, это относительное положение теряется.
В некоторых приложениях — например, при использовании энкодера для определения скорости, расстояния или направления движения — это может быть совершенно нормально.
В других приложениях требуется точное положение.
Единственный способ для инкрементального энкодера сообщить свое точное положение после выключения и включения питания — это вращение вала до тех пор, пока энкодер не достигнет индекса (если он есть).
Если вы разрабатываете систему, в которой важно знать точное положение вала, в том числе после того, как питание энкодера было отключено, вам следует рассмотреть абсолютный энкодер.
Как работают абсолютные энкодеры
Абсолютные оптические энкодеры используют светодиодную матрицу, оптический диск и фотодатчики, как и инкрементный энкодер, но схемы дисков немного отличаются.
Абсолютные оптические энкодеры могут использовать ряд линий и окон и несколько каналов для создания бинарного шаблона, который дает уникальное положение.
В некоторых дизайнах используется несколько полос для создания уникального узора в каждой точке диска. Например, используя фотографию выше, вы можете представить, что каждая позиция может иметь либо 1, либо 0, в зависимости от того, обнаруживают ли фотодатчики свет от светодиодов. Текущая позиция дисков будет 1001, что больше нигде не встречается при вращении вала.
В других конструкциях, таких как современные оптические абсолютные энкодеры, для создания абсолютного положения используется уникальная схема межстрочного интервала и толщины в одной полосе. Дизайн отличается, но каждая позиция на диске по-прежнему имеет уникальный шаблон, который больше нигде не встречается при вращении, что устраняет необходимость вращаться, чтобы найти положение индекса после выключения и включения питания.
Для многих приложений использование абсолютного энкодера не имеет преимуществ перед инкрементным. Однако, если вы работаете над конструкцией, в которой вращение для нахождения исходного положения после выключения питания не является идеальным или невозможным, абсолютный энкодер является подходящим инструментом для этой работы.
Например, если вы строите роботизированную руку или другой проект автоматизации, где вращение для поиска индекса может быть опасным для оборудования или людей в его окружении, выбор абсолютного энкодера гарантирует, что вы всегда будете знать точное положение.
Конечно, об абсолютных энкодерах можно узнать гораздо больше, чем мы можем уместить в одном сообщении в блоге. К счастью для вас, у нас есть расширенное вступление к нашему посту в блоге об абсолютных кодировщиках.
И эй, если вы ищете кодировщик и у вас все еще есть вопросы, обязательно ознакомьтесь с нашим последним техническим документом, который поможет вам найти правильный кодировщик для вашего проекта. В нем мы проходим через разрешение, тип движения, CPR против PPR и почти все остальное, что вы можете себе представить, связанное с выбором энкодера.
Инкрементальный и абсолютный энкодер — что такое абсолютный и инкрементальный энкодер
- Калькуляторы
- Задачи проектирования
Войти
Добро пожаловать! Войдите в свою учетную запись
ваше имя пользователя
ваш пароль
Забыли пароль?
Создать учетную запись
Политика конфиденциальности
Регистрация
Добро пожаловать!Зарегистрируйте аккаунт
ваш адрес электронной почты
ваше имя пользователя
Пароль будет отправлен вам по электронной почте.
Политика конфиденциальности
Восстановление пароля
Восстановить пароль
ваш адрес электронной почты
Поиск
Изменено:
Статьи категории
Определение абсолютного энкодера – Абсолютный энкодер определяет положение оси путем считывания цифрового кода с лицевой панели энкодера. Конструкции абсолютных энкодеров, а также инкрементных энкодеров практически одинаковы, единственное различие остается в методе измерения. Абсолютный энкодер выдает на своем выходе кодовый сигнал. Каждое угловое положение оси представляет собой значение кода детали на выходе. Здесь используются два типа кодирования: двоичный код, а также код Грея. Абсолютные энкодеры делятся на однооборотные и многооборотные. Однооборотные энкодеры идентифицируют настройки как раз в рамках одного оборота, поэтому результат поворота вала такого энкодера ровно на 360° обязательно совпадет с сигналом на выходе. Как уже было сказано ранее, инкрементальные энкодеры нацелены на достижение максимально возможного количества делений на оборот при сохранении небольшого размера устройства, тогда как абсолютные энкодеры делают все возможное для повышения разрешения и, прежде всего, скорости передачи данных. Абсолютный энкодер имеет возможность сохранять текущее положение даже после отключения напряжения питания (например, для измерения количества преобразований, выполненных прокатным станом).
Самое главное, расширяется разнообразие приложений для абсолютных энкодеров, включая варианты с коммерческими сетевыми интерфейсами. Миниатюризация таких энкодеров также очень важна, благодаря чему их можно использовать в небольших гаджетах, которые не являются производителями – например, в гаджетах. скоростные электронные камеры.
Абсолютные энкодеры преобразуют свои текущие настройки прямо в цифровое значение в двоичном коде, двоично-десятичном коде или коде Грея. Важным моментом является то, что каждое размещение энкодера представляет собой единственное, единственное в своем роде цифровое значение — отсюда и название абсолютных энкодеров. Разрешение абсолютного энкодера — это количество настроек на изменение или единицу длины, которое энкодер может преобразовать в цифровое значение.
Принцип работы абсолютного энкодера показан на рисунке ниже (на примере поворотного энкодера):.
Наиболее важным свойством абсолютных энкодеров по сравнению с инкрементными является то, что они предоставляют информацию об абсолютном размещении. Кодер такого типа выдает на своем выходе специальный цифровой код для каждой настройки благодаря встроенной кодовой матрице. Положение производителя всегда можно определить конкретно, даже если питание машины отключено. Если ось энкодера перемещается, когда питание устройства отключено, абсолютный энкодер точно определит текущее положение, когда станок снова активируется, что было невозможно с инкрементными энкодерами. По этой причине нет необходимости выполнять стандартную процедуру, а также определять нулевую точку каждый раз при повторном включении оборудования. Абсолютный энкодер выдает цифровой сигнал, сохраненный в виде кода, который может быть записан в двоичном коде, коде Грея или двоично-десятичном коде. Эти энкодеры снабжены параллельными или последовательными выходными цепями (SSI, BISS, Modbus и т. д.). Энкодеры с абсолютным измерением делятся на однооборотные и многооборотные.
Детали размещения выводятся кодировщиком в виде, например, 8-битное двоичное слово. В энкодерах с параллельным выходом это просто подходящая комбинация ноль-единица. Тем не менее, этот тип сигнала требует большого количества цифровых входов в главном устройстве (например, 8 бит = 8 входов). Вот почему в абсолютных энкодерах обычно используются другие пользовательские интерфейсы. Базовым является SSI, представляющий собой последовательный синхронный интерфейс. В кодере такого типа цифровое слово передается по шине данных бит за битом с тактовой частотой тактового входа.
Кроме того, предлагается целый ряд коммуникационных интерфейсов, которые можно разделить на 2 основные группы:
- Полевые сети: Modbus, CC-Link, CANopen, Devicenet, Profibus,
- Сети типа Ethernet: Powerlink, EtherCAT, Ethernet/IP, Modbus TCP/IP, Profinet
В дополнение к цифровым интерфейсам также доступны абсолютные энкодеры с аналоговыми выходами 0–10 В, 0–20 мА или 4–20 мА.
Разделение на абсолютные одиночные или многооборотные энкодеры целесообразно для вращающихся энкодеров. Из-за того, что каждое размещение энкодера имеет свой собственный специальный цифровой код, после преобразования вала энкодера на 360 ° мы получим то же значение. На самом деле это экземпляр с однооборотными энкодерами. Когда действительно необходимо идентифицировать большее количество изменений, возникает необходимость в многооборотном абсолютном энкодере. Количество переключений определяется с помощью системы передач, а также специально указывается для каждого энкодера. Подтверждение более чем одного преобразования во много раз повышает общее разрешение, которое является произведением разнообразия позиций на преобразование, а также количества преобразований.
Основы инкрементального энкодера
Инкрементальный энкодер содержит множество стандартных компонентов. С механической стороны это вал с размещенным кодовым диском, двумя подшипниками, расположенными на максимальном расстоянии друг от друга, системой сканирования, а также электронной системой, формирующей выходной сигнал.
Очень важным компонентом оптических энкодеров является кодовый диск. Компания SICK первой представила F-технологию, основанную на мишени с никелевым кодом, для датчиков контроля активности. Это то, что вы обнаружите в кодировщиках. Стальная кодовая стенка подходит для приложений с ударами или вибрацией. Энкодеры с F-технологией имеют значительно более длительный срок службы, а также устойчивы к любым неконтролируемым воздействиям по сравнению с аналогами с кодовыми дисками, изготовленными из стекла или пластика.
Кроме того, металлический кодовый циферблат гарантирует значительно более высокую повторяемость размеров. Инкременты, расположенные на кодовом диске, представляют собой не что иное, как вырезанные лазером пространства в металлическом диске, через которые проходит свет передатчика. Разнообразие приращений определяет параметр разрешения энкодера. Около десятка лет назад энкодерные диски изготавливались из стекла с насыпными вкраплениями. Стекло в силу своих свойств через некоторое время тускнеет, что значительно снижает воспроизводимость измерений.
Очень важным элементом являются подшипники, а также особенно их расстояние. Энкодеры семейства DFS60 или AFM60 имеют оптимальное расстояние между подшипниками. Это позволяет работать с более высокими нагрузками на вал устройства.
Сканирующая система состоит из:
- источника света,
- линзы, направляющей световой пучок, падающий на кодовый диск с приращениями,
- маски, которая помещается за мишенью, а также используется для разработки двух, но смещенных лучей от луча, прошедшего одно приращение,
- Светочувствительный аспект, улавливающий световые лучи.
С помощью маски два стандартных канала An, а также B выходного сигнала энкодера формируются из одного луча, сдвинутого по фазе на 90° электр. Используя каналы An и B одновременно, мы можем распознать команды вращения вала. Контроллер сравнивает, какой сигнал записывается первым. Если канал An после этого энкодер вращается по часовой стрелке, если канал B является первым, это означает, что инструкция вращения была изменена на против часовой стрелки. Кроме того, маска создает третий канал кодировщика — сеть Z, которая создается только один раз при полном вращении кодового диска. Дополнительный канал используется для создания или интеграции системы движения нашего производителя или устройства.
Фотоэлемент в конце сканирующей системы преобразует световые лучи, прошедшие через маску и кодовый диск, в электрические импульсы – в данном случае прямоугольные импульсы.
Энкодеры с синусоидальным выходным сигналом используют датчики Холла, а не оптический кодовый диск, и это лишь некоторые моменты. Любой вид синусоидального сигнала может быть интерполирован, а также преобразован в прямоугольный сигнал. Это соотношение используется в магнитных энкодерах.
Чрезвычайно важным фактором является то, что инкрементальный энкодер генерирует импульсы только при подаче питания и только в момент активности. Он не имеет возможности сохранения своих настроек. При измерении расстояния или вариации в момент отключения питания и после его повторного включения необходимо постоянно базировать систему. В случае измерения скорости этот элемент не так важен.
Безусловно, современное состояние инноваций, а также преобразование сигналов позволяет исключить некоторые аспекты предложенных выше систем сканирования. Сейчас трудно найти общие приращения на кодовом диске или датчике Холла в смысле учебника по цифровой современной технике. В настоящее время стандартным компонентом любого типа энкодера является печатная плата со встроенной схемой, которая, исходя из потребностей сегодня, является инкрементным энкодером, а завтра может быть абсолютным. Основная идея операционной концепции осталась.
Инкрементальный и абсолютный энкодеры
Энкодеры можно разделить на инкрементальные и абсолютные. Отличие между ними состоит в том, что первые теряют свое положение после отключения от них питающего напряжения. Это означает, что устройство нуждается в базировании, и только после этого мы можем начать надлежащие измерения. Второй тип, с другой стороны, может показать свое расположение, даже если источник питания отключен, а затем снова подключен. Здесь следует отметить энкодеры положения, которые имеют особую функцию — возможность запоминания положения в абсолютных многооборотных энкодерах без использования батареи для поддержания памяти или сложного механизма с оборудованием. Несмотря на скорость вала энкодера, его вращение генерирует короткий всплеск напряжения в небольшой цепи, питающей модуль подсчета преобразований. Он работает отдельно от питания внешнего датчика. Это обеспечивается передовой системой подсчета оборотов, основанной на эффекте Виганда.
| Incremental Encoders | Absolute Encoders | |
| Output signal | The output signal is rectangular pulses | The output signal is a code signal |
| Position memory | При отключении питания не сохраняет положение | При отключении питания запоминает положение |
| Направление вращения | форма генерируемого выходного сигнала одинакова независимо от направления вращения, меняется только порядок генерируемых сигналов | -позиция независимо от направления, информация всегда о конкретной позиции — скорость в зависимости от направления вращения, генерируемое значение скорости может быть со знаком «-» или «+» |
Михал
Инженер электроники и телекоммуникаций с дипломом магистра электроэнергетики.
