Что такое абсолютный энкодер. Как устроен абсолютный энкодер. В чем преимущества абсолютного энкодера перед инкрементальным. Какие типы кодирования используются в абсолютных энкодерах. Где применяются абсолютные энкодеры.
Что такое абсолютный энкодер и как он работает
Абсолютный энкодер — это тип датчика угла поворота, который генерирует уникальный цифровой код для каждого углового положения вала. В отличие от инкрементального энкодера, абсолютный энкодер не требует счетчика импульсов, так как угол поворота всегда известен.
Основные особенности работы абсолютного энкодера:
- Формирует сигнал как при вращении, так и в неподвижном состоянии
- Использует кодовый диск с несколькими концентрическими дорожками
- Каждая дорожка формирует часть уникального двоичного кода для конкретной позиции вала
- Не теряет информацию о положении при отключении питания
- Не требует возврата в начальное положение после включения
Устройство абсолютного энкодера
Основные компоненты абсолютного энкодера:

- Вал, соединенный с измеряемым объектом
- Кодовый диск с несколькими концентрическими дорожками
- Источник света (обычно светодиод)
- Фотоприемники для считывания кода с диска
- Электронная схема для обработки сигналов
Принцип работы абсолютного энкодера заключается в следующем:
- При вращении вала кодовый диск поворачивается вместе с ним
- Свет от светодиода проходит через прозрачные участки дорожек диска
- Фотоприемники регистрируют световой поток, формируя двоичный код
- Электронная схема преобразует код в выходной сигнал
Преимущества абсолютного энкодера перед инкрементальным
Абсолютный энкодер имеет ряд важных преимуществ по сравнению с инкрементальным типом:
- Сохраняет информацию о положении при отключении питания
- Не требует возврата в начальное положение после включения
- Формирует сигнал даже при неподвижном вале
- Менее чувствителен к помехам и вибрациям
- Не накапливает ошибку измерения с течением времени
- Позволяет определить точное положение сразу после включения
Типы кодирования в абсолютных энкодерах
В абсолютных энкодерах используются различные типы кодирования положения вала. Наиболее распространенные из них:

Двоичный код
Двоичный код — это простейший способ кодирования, использующий только два символа: 0 и 1. Каждое положение вала кодируется уникальной последовательностью нулей и единиц.
Преимущества двоичного кода:
- Простота реализации
- Легко обрабатывается микропроцессорами
- Не требует дополнительного преобразования
Недостатки:
- При переходе между соседними позициями может меняться несколько бит одновременно
- Высокая вероятность ошибки при считывании кода
Код Грея
Код Грея — это разновидность двоичного кода, в котором при переходе между соседними позициями изменяется только один бит. Это свойство делает код Грея более устойчивым к ошибкам считывания.
Преимущества кода Грея:
- Высокая помехоустойчивость
- Минимальная вероятность ошибки при считывании
- Возможность изменения направления счета инверсией старшего бита
Недостатки:
- Требует преобразования в двоичный код для дальнейшей обработки
- Сложнее в реализации по сравнению с обычным двоичным кодом
Области применения абсолютных энкодеров
Абсолютные энкодеры широко используются в различных отраслях промышленности и техники, где требуется точное определение углового положения. Основные сферы применения:

- Робототехника и автоматизация производства
- Станки с числовым программным управлением (ЧПУ)
- Системы позиционирования антенн и телескопов
- Медицинское оборудование (томографы, рентгеновские аппараты)
- Упаковочное и печатное оборудование
- Лифты и подъемные механизмы
- Системы управления движением в транспортных средствах
Однооборотные и многооборотные абсолютные энкодеры
Абсолютные энкодеры делятся на два основных типа в зависимости от диапазона измерения:
Однооборотные энкодеры
Однооборотные энкодеры измеряют угол поворота в пределах одного оборота (360 градусов). После полного оборота код начинается заново с начального значения.
Особенности однооборотных энкодеров:
- Используются для измерения угла поворота в пределах 360 градусов
- Применяются в антенных системах, коленчатых прессах и других механизмах с ограниченным углом поворота
- Имеют более простую конструкцию по сравнению с многооборотными
Многооборотные энкодеры
Многооборотные энкодеры способны измерять угол поворота в диапазоне нескольких оборотов. Они дополнительно регистрируют количество полных оборотов вала.

Особенности многооборотных энкодеров:
- Используются для измерения линейных перемещений, преобразованных во вращательное движение
- Применяются в линейных приводах, системах с зубчатой рейкой и других механизмах с многооборотным движением
- Имеют более сложную конструкцию с дополнительным механизмом подсчета оборотов
Факторы, влияющие на выбор абсолютного энкодера
При выборе абсолютного энкодера для конкретного применения следует учитывать следующие факторы:
- Разрешающая способность (количество бит в выходном коде)
- Тип выходного интерфейса (параллельный, последовательный, SSI, BiSS и др.)
- Однооборотный или многооборотный тип
- Максимальная скорость вращения
- Точность и повторяемость измерений
- Устойчивость к внешним воздействиям (температура, влажность, вибрация)
- Габаритные размеры и способ монтажа
- Стоимость и доступность на рынке
Тенденции развития абсолютных энкодеров
Современные тенденции в развитии абсолютных энкодеров включают:
- Увеличение разрешающей способности (до 32 бит и более)
- Внедрение новых типов интерфейсов (например, EtherCAT, PROFINET)
- Миниатюризация конструкции
- Повышение устойчивости к экстремальным условиям эксплуатации
- Интеграция дополнительных функций (диагностика, самокалибровка)
- Снижение энергопотребления
Эти тенденции способствуют расширению областей применения абсолютных энкодеров и повышению их эффективности в различных системах автоматизации и управления.
Принцип работы абсолютного энкодера
Абсолютный энкодер относится к типу энкодеров, который выполняет уникальный код для каждой позиции вала. В отличие от инкрементного энкодера, счетчик импульсов не нужен, т.к. угол поворота всегда известен. Абсолютный энкодер формирует сигнал как во время вращения, так и в режиме покоя. Диск абсолютного энкодера отличается от диска пошагового энкодера, так как имеет несколько концентрических дорожек. Каждой дорожкой формируется уникальный двоичный код для конкретной позиции вала.

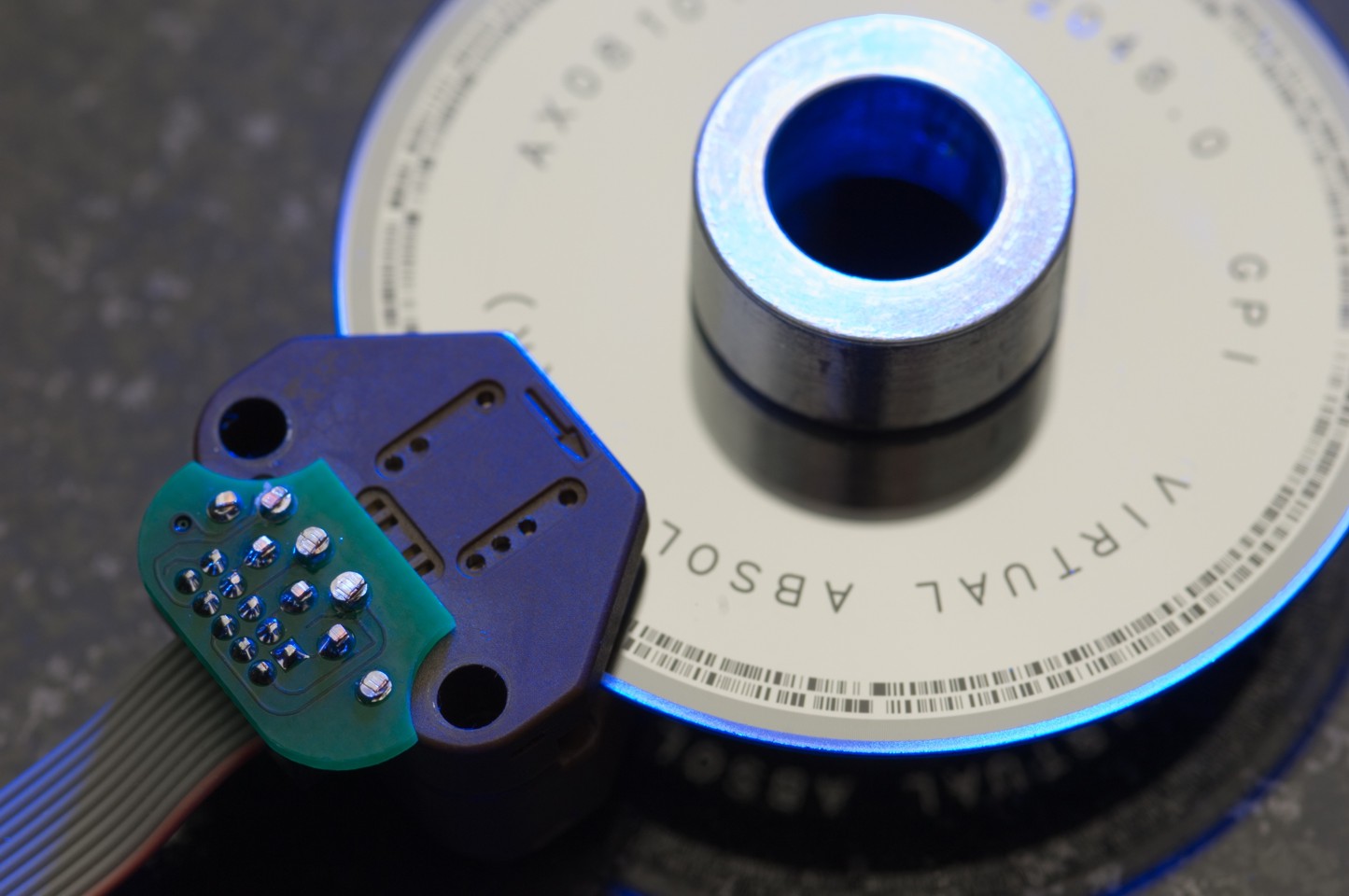
Кодовый диск абсолютного энкодера
Абсолютный энкодер не теряет своего значения при потере питания и не требует возвращения в начальную позицию. Сигнал абсолютного энкодера не подвержен помехам и для него не требуется точная установка вала. Кроме того, даже если кодированный сигнал не может быть прочитан энкодером, если, например, вал вращается слишком быстро, правильный угол вращения будет зарегистрирован, когда скорость вращения уменьшится. Абсолютный энкодер устойчив к вибрациям.
Двоичный код
Двоичный код — это широкораспространенный код, который может обрабатываться непосредственно микропроцессором и является основным кодом для обработки цифровых сигналов. Двоичный код состоит только из 0 и 1.
Построение ДК осуществляется по следующему принципу:

Таким образом выглядит в данном случае число 10 в двоичном коде.
Наибольшее число, которое может быть выражено двоичным кодом, зависит от количества используемых разрядов, т.е. от количества битов в комбинации, выражающей число. Например, для выражения числовых значений от 0 до 7 достаточно иметь 3-разрядный или 3-битовый код:
| Числовое значение | |
|
1 |
000 |
| 2 | 001 |
| 3 | 010 |
| 4 | 100 |
| 5 | 101 |
| 6 | 110 |
| 7 | 111 |
Отсюда видно, что для числа больше 7 при 3-разрядном коде уже нет кодовых комбинаций из 0 и 1. Переходя от чисел к физическим величинам сформулируем вышеприведенное утверждение в более общем виде: наибольшее количество значений m какой-либо величины (угла поворота, напряжения, тока и др.), которое может быть выражено двоичным кодом, зависит от числа используемых разрядов n как m =2 n . Если n =3, как в рассмотренном примере, то получим 8 значений, включая ведущий 0.
Двоичный код является многошаговым кодом. Это означает, что при переходе с одного положения (значения) в другое могут изменяться несколько бит одновременно. Например, число 3 в двоичном коде = 011. Число же 4 в двоичном коде = 100. Соответственно, при переходе от 3 к 4 меняют свое состояние на противоположное все 3 бита одновременно. Считывание такого кода с кодового диска привело бы к тому, что из-за неизбежных отклонений (толеранцев) при производстве кодового диска изменение информации от каждой из дорожек в отдельности никогда не произойдет одновременно. Это, в свою очередь, привело бы к тому, что при переходе от одного числа к другому кратковременно будет выдана неверная информация. Так при вышеупомянутом переходе от числа 3 к числу 4 очень вероятна кратковременная выдача числа 7, когда, например, старший бит во время перехода поменял свое значение немного раньше чем остальные. Таким образом, использование обычного двоичного кода может привести к большим погрешностям, так как две соседние кодовые комбинации могут отличаться друг от друга не в одном, а в нескольких разрядах. Чтобы избежать этого применяется так называемый одношаговый код, например, так называемый Грей-код.
Код Грея
Код Грея предпочтительнее обычного двоичного тем, что обладает свойством непрерывности бинарной комбинации: изменение кодируемого числа на единицу соответствует изменению кодовой комбинации только в одном разряде. Он строится на базе двоичного по следующему правилу: старший разряд остается без изменения; каждый последующий разряд инвертируется, если предыдущий разряд исходного двоичного кода равен единице. Этот алгоритм построения может быть формально представлен как результат сложения по модулю два исходной комбинации двоичного кода с такой же комбинацией, но сдвинутой на один разряд вправо. При этом крайний правый разряд сдвинутой комбинации отбрасывается.
Таким образом, Грей-код является так называемым одношаговым кодом, т.к. при переходе от одного числа к другому всегда меняется лишь какой-то один бит. Погрешность при считывании информации с механического кодового диска при переходе от одного числа к другому приведет лишь к тому, что переход от одного положения к другом будет лишь несколько смещен по времени, однако выдача совершенно неверного значения углового положения при переходе от одного положения к другому полностью исключается.
Преимуществом Грей-кода является также его способность зеркального отображения информации. Так, инвертируя старший бит можно простым образом менять направление счета и, таким образом, подбирать к фактическому (физическому) направлению вращения оси. Изменение направления счета может легко изменяться, управляя так называемым входом » Complement «. Выдаваемое значение может быть возрастающим или спадающим при одном и том же физическом направлении вращения оси.
Поскольку информация, выраженная в Грей-коде, имеет чисто кодированный характер не несущей реальной числовой информации, должен он перед дальнейшей обработкой сперва преобразован в стандартный бинарный код. Осуществляется это при помощи преобразователя кода (декодера Грей-Бинар), который к счастью легко реализируется с помощью цепи из логических элементов «исключающее или» ( XOR ) как программным, так и аппаратным способом (см. схему ниже).
Из таблицы видно, что при переходе от одного числа к другому (соседнему) лишь один бит информации меняет свое состояние, если число представлено кодом Грея, в то время, как в двоичном коде могут поменять свое состояние несколько бит одновременно. Код Грея — выход, следовательно, он никогда не имеет ошибку чтения и применяется во многих абсолютных энкодерах.
| Десятичный код | Двоичный код | Код Грея |
| 23 22 21 20 | ||
|
0 1 2 3 |
0 0 0 0 0 0 0 1 0 0 1 0 0 0 0 1 |
0 0 0 0 0 0 0 1 0 0 1 0 0 0 0 0 |
|
4 5 6 7 |
0 1 0 0 0 1 0 1 0 1 1 0 0 1 1 1 |
0 1 1 0 0 1 1 1 0 1 0 1 0 1 0 0 |
|
8 9 10 11 |
1 0 0 0 1 0 0 1 1 0 1 0 1 0 1 1 |
1 1 0 0 1 1 0 1 1 1 1 1 1 1 1 0 |
|
12 13 14 15 |
1 1 0 0 1 1 0 1 1 1 1 0 1 1 1 1 |
1 0 1 0 1 0 1 1 1 0 0 1 1 0 0 0 |
Биты меняющие свое состояние, при переходе от одного числа к другому, обозначены красным цветом.
Используйте такую схему для преобразования Кода Грея в двоичный код.

Примечание:
*Код Грея может логически преобразовываться в двоичный код когда терминал Vin подключается к 0 V.
**Инвертор
Gray-Excess-Code
Обычный одношаговый Грей-код подходит для разрешений, которые могут быть представлены в виде числа возведенного в степень 2. В случаях, где надо реализовать другие разрешения из обычного Грей-кода, вырезается и используется средний его участок. Таким образом, сохраняется «одношаговость» кода. Однако числовой диапазон начинается не с нуля, а смещяется на определенное значение. При обработке информации от генерируемого сигнала отнимается половина разницы между первоначальным и редуцированным разрешением. Такие разрешения как, например, 360° для выражения угла часто реализируются этим методом. Так 9-ти битный Грей-код равный 512 шагов, урезанный с обеих сторон на 76 шагов будет равен 360°.
О чем эта статья
В статье вы узнаете, что такое энкодер, какие он может измерять величины. Узнаете что такое инкрементальный и абсолютный энкодер. Познакомитесь с классификацией по принципу действия. А также узнаете на какие характеристики энкодеров нужно обращать внимание при выборе. Напоследок, небольшой список производителей.
Вы также можете посмотреть другие статьи. Например, «Датчики измерения давления» или «Относительная влажность воздуха».
Что такое энкодер
Контроллер (датчик) положения вращающегося объекта или по-другому энкодер — это электромеханическое устройство, с помощью которого можно определить положение вращающейся оси (вала). В данном устройстве механическое движение преобразовывается в электрические сигналы, определяющие положение объекта, дают информацию об угле поворота вала, его положении и направлении вращения. С помощью энкодера также можно измерить длину и расстояние или установить перемещение инструмента.
Энкодеры имеют широкую сферу применения в печатной промышленности, металлообработке, лифтовой технике, автоматах для фасовки, упаковки и розлива, в испытательных стендах, а также в роботах и прочих машинах, требующих точной регистрации показателей движения частей. Они практически полностью заменили широко распространенные ранее сельсины.
Типы энкодеров
Выделяют следующие типы энкодеров: инкрементальные (инкрементные) и абсолютные.
Инкрементальный энкодер
Инкрементальный энкодер — это устройство, которое определяет угол поворота вращающегося объекта, выдавая импульсный цифровой код. Используется для определения скорости вращения вала (оси), когда нет нужды сохранять абсолютное угловое положение при выключении питания. То есть, если вал неподвижен, передача импульсов прекращается. Другими словами, если включить энкодер этого типа, то отсчет поворота угла начнется с нуля, а не с угла на который он был выставлен до момента выключения. Оси объекта и энкодера соединяются между собой с помощью специальной гибкой переходной муфты или жесткой втулки, либо энкодер может помещаться собственно на сам вал. Основным преимуществом инкрементальных энкодеров является их простота, надежность и относительно низкая стоимость.
Абсолютный энкодер
Абсолютный энкодер выдает цифровой код, различный для каждого положения объекта, позволяет определять угол поворота оси даже в случае исчезновения и восстановления питания и не требует возвращения объекта в начальное положение, что является несомненным преимуществом этого типа энкодеров. Так как угол поворота всегда известен, то счетчик импульсов в этом случае не нужен. Сигнал абсолютного энкодера не подвергается помехам и вибрации и тем самым для него не нужна точная установка вала. Абсолютный энкодер используется в высокоточных системах: робототехника, станки с числовым программным управлением и др.
Классификация по принципу действия
По принципу действия различают:
- энкодеры оптические
- магнитные
- магниторезисторные
Оптические
Рис. Схема оптического энкодера.
Конструкция оптического энкодера состоит из специального оптического диска, светоизлучающего диода и фотодетектора. Диск с нанесенной оптической шкалой (поверхность диска состоит из прозрачных и непрозрачных участков) жестко закрепляется на валу. При вращении объекта специальный датчик считывает информацию и преобразовывает ее в импульсы.
Магнитные
Рис. Схема магнитного энкодера.
Магнитный энкодер включает в себя вал с магнитом и датчиком Холла, который регистрирует последовательность прохождения магнитных полюсов (северные и южные) и измеряет скорость и направление вращения.
Магниторезисторные
Рис. Схема магниторезистивного энкодера.
Магниторезистивный энкодер состоит из катушки помещенной в магнитное поле, катушка закрепляется на валу. При вращении катушки ее витки будут изменять положение относительно поля, они будут то пералельны полю, то перпенликулярны, соответсвенно ток в катушке будут меняться. Таким образом, протекащий через катушку ток будут изменяться в зависимости от угла поворота вала.
Параметры, на которые необходимо обратить внимание при выборе энкодеров
При выборе энкодера следует обратить внимание на следующие параметры:
- Число импульсов на оборот (число бит у абсолютных энкодеров). От данного показателя зависит точность системы — чем больше импульсов тем выше точность.
- Вал, отверстие под вал (и их диаметр). От этого зависит каким образом на энкодер будет передаваться вращение, либо объект будет подсоединяться к отверстию энкодера, либо на вал энкодера будет передаваться вращение с помощью, например, зубчатой передачи или ремня.
- Тип выходного сигнала энкодера (HTL, TTL, RS422, двоичный код, код Грея, и др.). Данный параметр влияет на снятие сигнала энкодера и дальнейшую его передачу..
- Напряжение питания. От этого показателя зависит работа системы и точность снятия сигнала.
- Длина кабеля или тип разъема влияют на возможности установки рабочей системы.
- Другие требования по крепежу (необходимость муфты, монтажного фланца, крепежной штанги и др.). Данный параметр влияет на устойчивость установки и тем самым на точность системы.
- Важна также степень защиты энкодера от проникновения пыли и влаги.
Производители
На российском рынке основными производителями энкодеров являются предприятия Екатеринбурга, а именно — ЗАО «Сенсор», НПП «Уралметаллургавтоматика», ЗАО «Уралчерметавтоматика». Кроме этого, выделяют НПК «ТЕКО» (г. Челябинск), СКБ ИС (г. Санкт-Петербург), Меандр (г. Санкт-Петербург), СТРАУС (г. Тольятти), Мега-К (г. Калуга) и др.
Опубликована 16-10-11.
Если вам понравилась статья нажмите на одну из кнопок ниже
Принцип работы абсолютного энкодера — RadioRadar
Абсолютный энкодер относится к типу энкодеров, который выполняет уникальный код для каждой позиции вала. В отличие от инкрементного энкодера, счетчик импульсов не нужен,т.к. угол поворота всегда известен. Абсолютный энкодер формирует сигнал как во время вращения, так и в режиме покоя. Диск абсолютного энкодера отличается от диска пошагового энкодера, так как имеет несколько концентрических дорожек. Каждой дорожкой формируется уникальный двоичный код для конкретной позиции вала.
Рис. 1. Кодовый диск абсолютного энкодера
Абсолютный энкодер не теряет своего значения при потере питания и не требует возвращения в начальную позицию. Сигнал абсолютного энкодера не подвержен помехам и для него не требуется точная установка вала. Кроме того, даже если кодированный сигнал не может быть прочитан энкодером если, например, вал вращается слишком быстро, правильный угол вращения будет зарегистрирован, когда скорость вращения уменьшится. Абсолютный энкодер устойчив к вибрациям.
Двоичный код
Двоичный код — это широкораспространенный код, который может обрабатываться непосредственно микропроцессором и является основным кодом для обработки цифровых сигналов. Двоичный код состоит только из 0 и 1.
Построение ДК осуществляется по следующему принципу:
Таким образом выглядит в данном случае число 10 в двоичном коде.
Наибольшее число, которое может быть выражено двоичным кодом, зависит от количества используемых разрядов, т.е. от количества битов в комбинации, выражающей число. Например, для выражения числовых значений от 0 до 7 достаточно иметь 3-разрядный или 3-битовый код:
| числовое значение | двоичный код |
| 0 | 000 |
| 1 | 001 |
| 2 | 010 |
| 3 | 011 |
| 4 | 100 |
| 5 | 101 |
| 6 | 110 |
| 7 | 111 |
Отсюда видно, что для числа больше 7 при 3-разрядном коде уже нет кодовых комбинаций из 0 и 1. Переходя от чисел к физическим величинам сформулируем вышеприведенное утверждение в более общем виде: наибольшее количество значений m какой-либо величины (угла поворота, напряжения, тока и др.), которое может быть выражено двоичным кодом, зависит от числа используемых разрядов n как m =2 n . Если n =3, как в рассмотренном примере, то получим 8 значений, включая ведущий 0. Двоичный код является многошаговым кодом. Это означает, что при переходе с одного положения (значения) в другое могут изменяться несколько бит одновременно. Например, число 3 в двоичном коде = 011. Число же 4 в двоичном коде = 100. Соответственно, при переходе от 3 к 4 меняют свое состояние на противоположное все 3 бита одновременно. Считывание такого кода с кодового диска привело бы к тому, что из-за неизбежных отклонений (толеранцев) при производстве кодового диска изменение информации от каждой из дорожек в отдельности никогда не произойдет одновременно. Это, в свою очередь, привело бы к тому, что при переходе от одного числа к другому кратковременно будет выдана неверная информация. Так при вышеупомянутом переходе от числа 3 к числу 4 очень вероятна кратковременная выдача числа 7, когда, например, старший бит во время перехода поменял свое значение немного раньше чем остальные. Таким образом, использование обычного двоичного кода может привести к большим погрешностям, так как две соседние кодовые комбинации могут отличаться друг от друга не в одном, а в нескольких разрядах. Чтобы избежать этого применяется так называемый одношаговый код, например, так называемый Грей-код.
Код Грея
Код Грея предпочтительнее обычного двоичного тем, что обладает свойством непрерывности бинарной комбинации: изменение кодируемого числа на единицу соответствует изменению кодовой комбинации только в одном разряде. Он строится на базе двоичного по следующему правилу: старший разряд остается без изменения; каждый последующий разряд инвертируется, если предыдущий разряд исходного двоичного кода равен единице. Этот алгоритм построения может быть формально представлен как результат сложения по модулю два исходной комбинации двоичного кода с такой же комбинацией, но сдвинутой на один разряд вправо. При этом крайний правый разряд сдвинутой комбинации отбрасывается.
Таким образом, Грей-код является так называемым одношаговым кодом, т.к. при переходе от одного числа к другому всегда меняется лишь какой-то один бит. Погрешность при считывании информации с механического кодового диска при переходе от одного числа к другому приведет лишь к тому, что переход от одного положения к другом будет лишь несколько смещен по времени, однако выдача совершенно неверного значения углового положения при переходе от одного положения к другому полностью исключается. Преимуществом Грей-кода является также его способность зеркального отображения информации. Так, инвертируя старший бит можно простым образом менять направление счета и, таким образом, подбирать к фактическому (физическому) направлению вращения оси. Изменение направления счета может легко изменяться, управляя так называемым входом » Complement «. Выдаваемое значение может быть возврастающим или спадающим при одном и том же физическом направлении вращения оси.
Поскольку информация, выраженная в Грей-коде, имеет чисто кодированный характер не несущей реальной числовой информации, должен он перед дальнейшей обработкой сперва преобразован в стандартный бинарный код. Осуществляется это при помощи преобразователя кода (декодера Грей-Бинар), который к счастью легко реализируется с помощью цепи из логических элементов «исключающее или» ( XOR ) как программным, так и аппаратным способом (см. схему ниже).
Из таблицы видно, что при переходе от одного числа к другому (соседнему) лишь один бит информации меняет свое состояние, если число представлено кодом Грея, в то время, как в двоичном коде могут поменять свое состояние несколько бит одновременно. Код Грея — выход, следовательно, он никогда не имеет ошибку чтения и применяется во многих абсолютных энкодерах.
| Десятичный код | Двоичный код | Код Грея |
| 23 22 21 20 | ||
| 0 1 2 3 | 0 0 0 0 0 0 0 1 0 0 1 0 0 0 1 1 | 0 0 0 0 0 0 0 1 0 0 1 1 0 0 1 0 |
| 4 5 6 7 | 0 1 0 0 0 1 0 1 0 1 1 0 0 1 1 1 | 0 1 1 0 0 1 1 1 0 1 0 1 0 1 0 0 |
| 8 9 10 11 | 1 0 0 0 1 0 0 1 1 0 1 0 1 0 1 1 | 1 1 0 0 1 1 0 1 1 1 1 1 1 1 1 0 |
| 12 13 14 15 | 1 1 0 0 1 1 0 1 1 1 1 0 1 1 1 1 | 1 0 1 0 1 0 1 1 1 0 0 1 1 0 0 0 |
Биты меняющие свое состояние, при переходе от одного числа к другому, обозначены красным цветом.
Используйте такую схему для преобразования Кода Грея в двоичный код.
Рис. 2. Схема для преобразования Кода Грея в двоичный код
Примечание:
*Код Грея может логически преобразовываться в двоичный код когда терминал Vin подключается к 0 V.
**Инвертор
***Исключающее или
Gray-Excess-Code
Обычный одношаговый Грей-код подходит для разрешений, которые могут быть представлены в виде числа возведенного в степень 2. В случаях, где надо реализовать другие разрешения из обычного Грей-кода, вырезается и используется средний его участок. Таким образом, сохраняется «одношаговость» кода. Однако числовой диапазон начинается не с нуля, а смещяется на определенное значение. При обработке информации от генерируемого сигнала отнимается половина разницы между первоначальным и редуцированным разрешением. Такие разрешения как, например, 360° для выражения угла часто реализируются этим методом. Так 9-ти битный Грей-код равный 512 шагов, урезанный с обеих сторон на 76 шагов будет равен 360°.
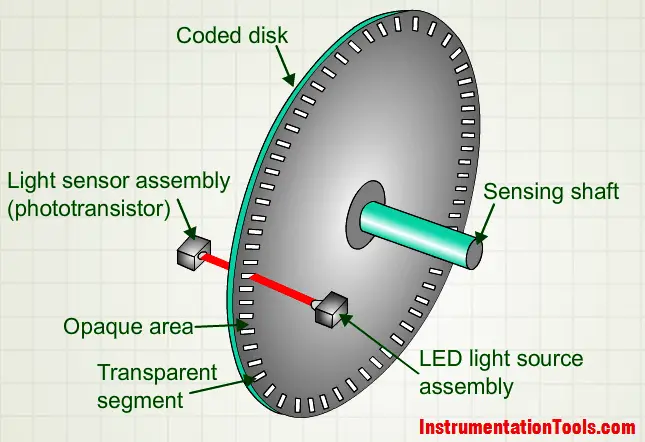
Измерительная система абсолютного энкодера состоит из поворотной оси, монтированной на двух высокопрецизионных подшипниках, кодового диска, установленного на ось, а также опто-электронной считывающей матрицы и схемы обработки сигнала. В качестве источника света служит светодиод, инфракрасные лучи которого просвечивают кодовый диск и попадают на фототранзисторную матрицу, расположенную с обратной стороны кодового диска. При каждом шаге углового положения кодового диска темные участки кода предотвращают попадание света на те или иные фототранзисторы фототранзисторной матрицы. Таким образом, темные — светлые участки каждой из дорожек будут отображены на фототранзисторной матрице и преобразованы в электрические сигналы. Электрические сигналы, в свою очередь, подготавливаются операционными усилителями и выходными трайберами для выдачи в виде n -бит бинарного сигнала. Изменения интенсивности источника светового потока регистрируются с помощью дополнительного сенсора и компенсируются электронной схемой.
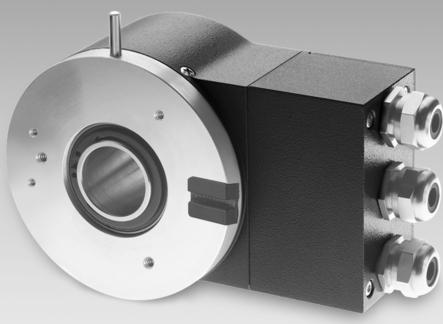
Однооборотный энкодер
Однооборотными ( Single — Turn ) датчиками называются датчики, которые выдают абсолютное значения в пределах одного оборота, т.е. в радиусе 360°. После одного оборота код является полностью пройденым и начинается опять с его начального значения. Эти датчики служат, преимущественно, для измерения угла поворота и применяются, например, в антенных системах, эксцентричных коленчатых пресах и т.д.
Рис. 1. Устройство однооборотного энкодера
Многооборотный энкодер
Линейные перемещения предполагают необходимым применение измерительной системы с n -количеством оборотов. Например, при линейных приводах или при задачах измерения с помощью зубчатой измерительной штанги, применение однооборотных датчиков является неприемлемым. В этом случае приходят на помощь датчики, где дополнительно к измерению угла поворота в пределах одного оборота также происходит регистрация количества оборотов с помощью дополнительно встроенного передаточного механизма, т.е. своего рода редуктора из нескольких кодовых оптических дисков, образуя, таким образом, многооборотный энкодер ( Multi — Turn ).
Рис. 2. Устройство многооборотного энкодера
Принцип работы абсолютного энкодера – rentamatic
Абсолютный энкодер относится к типу энкодеров, который выполняет уникальный код для каждой позиции вала. В отличие от инкрементного энкодера, счетчик импульсов не нужен, т.к. угол поворота всегда известен. Абсолютный энкодер формирует сигнал как во время вращения, так и в режиме покоя. Диск абсолютного энкодера отличается от диска пошагового энкодера, так как имеет несколько концентрических дорожек. Каждой дорожкой формируется уникальный двоичный код для конкретной позиции вала.
Кодовый диск абсолютного энкодера
Абсолютный энкодер не теряет своего значения при потере питания и не требует возвращения в начальную позицию. Сигнал абсолютного энкодера не подвержен помехам и для него не требуется точная установка вала. Кроме того, даже если кодированный сигнал не может быть прочитан энкодером, если, например, вал вращается слишком быстро, правильный угол вращения будет зарегистрирован, когда скорость вращения уменьшится. Абсолютный энкодер устойчив к вибрациям.
Двоичный код
Двоичный код – это широкораспространенный код, который может обрабатываться непосредственно микропроцессором и является основным кодом для обработки цифровых сигналов. Двоичный код состоит только из 0 и 1.
Построение ДК осуществляется по следующему принципу:
1x23 + 0x22 + 1x21 + 0x20
Таким образом выглядит в данном случае число 10 в двоичном коде.
Наибольшее число, которое может быть выражено двоичным кодом, зависит от количества используемых разрядов, т.е. от количества битов в комбинации, выражающей число. Например, для выражения числовых значений от 0 до 7 достаточно иметь 3-разрядный или 3-битовый код:
|
Отсюда видно, что для числа больше 7 при 3-разрядном коде уже нет кодовых комбинаций из 0 и 1.
Переходя от чисел к физическим величинам сформулируем вышеприведенное утверждение в более общем виде: наибольшее количество значений m какой-либо величины (угла поворота, напряжения, тока и др.), которое может быть выражено двоичным кодом, зависит от числа используемых разрядов n как m =2 n . Если n =3, как в рассмотренном примере, то получим 8 значений, включая ведущий 0.
Двоичный код является многошаговым кодом. Это означает, что при переходе с одного положения (значения) в другое могут изменяться несколько бит одновременно. Например, число 3 в двоичном коде = 011. Число же 4 в двоичном коде = 100. Соответственно, при переходе от 3 к 4 меняют свое состояние на противоположное все 3 бита одновременно. Считывание такого кода с кодового диска привело бы к тому, что из-за неизбежных отклонений (толеранцев) при производстве кодового диска изменение информации от каждой из дорожек в отдельности никогда не произойдет одновременно. Это, в свою очередь, привело бы к тому, что при переходе от одного числа к другому кратковременно будет выдана неверная информация. Так при вышеупомянутом переходе от числа 3 к числу 4 очень вероятна кратковременная выдача числа 7, когда, например, старший бит во время перехода поменял свое значение немного раньше чем остальные. Таким образом, использование обычного двоичного кода может привести к большим погрешностям, так как две соседние кодовые комбинации могут отличаться друг от друга не в одном, а в нескольких разрядах. Чтобы избежать этого применяется так называемый одношаговый код, например, так называемый Грей-код.
Код Грея
Код Грея предпочтительнее обычного двоичного тем, что обладает свойством непрерывности бинарной комбинации: изменение кодируемого числа на единицу соответствует изменению кодовой комбинации только в одном разряде. Он строится на базе двоичного по следующему правилу: старший разряд остается без изменения; каждый последующий разряд инвертируется, если предыдущий разряд исходного двоичного кода равен единице. Этот алгоритм построения может быть формально представлен как результат сложения по модулю два исходной комбинации двоичного кода с такой же комбинацией, но сдвинутой на один разряд вправо. При этом крайний правый разряд сдвинутой комбинации отбрасывается.
Таким образом, Грей-код является так называемым одношаговым кодом, т.к. при переходе от одного числа к другому всегда меняется лишь какой-то один бит. Погрешность при считывании информации с механического кодового диска при переходе от одного числа к другому приведет лишь к тому, что переход от одного положения к другом будет лишь несколько смещен по времени, однако выдача совершенно неверного значения углового положения при переходе от одного положения к другому полностью исключается.
Преимуществом Грей-кода является также его способность зеркального отображения информации. Так, инвертируя старший бит можно простым образом менять направление счета и, таким образом, подбирать к фактическому (физическому) направлению вращения оси. Изменение направления счета может легко изменяться, управляя так называемым входом ” Complement “. Выдаваемое значение может быть возврастающим или спадающим при одном и том же физическом направлении вращения оси.
Поскольку информация, выраженная в Грей-коде, имеет чисто кодированный характер не несущей реальной числовой информации, должен он перед дальнейшей обработкой сперва преобразован в стандартный бинарный код. Осуществляется это при помощи преобразователя кода (декодера Грей-Бинар), который к счастью легко реализируется с помощью цепи из логических элементов «исключающее или» ( XOR ) как программным, так и аппаратным способом (см. схему ниже).
Из таблицы видно, что при переходе от одного числа к другому (соседнему) лишь один бит информации меняет свое состояние, если число представлено кодом Грея, в то время, как в двоичном коде могут поменять свое состояние несколько бит одновременно. Код Грея – выход, следовательно, он никогда не имеет ошибку чтения и применяется во многих абсолютных энкодерах.
| Десятичный код | Двоичный код | Код Грея |
23 22 21 20 | ||
0 | 0 0 0 0 | 0 0 0 0 |
| 1 | 0 0 0 1 | 0 0 0 1 |
| 2 | 0 0 1 0 | 0 0 1 1 |
| 3 | 0 0 1 1 | 0 0 1 0 |
4 | 0 1 0 0 | 0 1 1 0 |
| 5 | 0 1 0 1 | 0 1 1 1 |
| 6 | 0 1 1 0 | 0 1 0 1 |
| 7 | 0 1 1 1 | 0 1 0 0 |
8 | 1 1 0 0 | 1 1 0 0 |
| 9 | 1 1 0 0 | 1 1 0 1 |
| 10 | 1 1 0 1 | 1 1 1 1 |
| 11 | 1 0 1 0 | 1 1 1 0 |
12 | 1 1 0 0 | 1 0 1 0 |
| 13 | 1 1 0 1 | 1 0 1 1 |
| 14 | 1 1 1 0 | 1 0 0 1 |
| 15 | 1 1 1 1 | 1 0 0 0 |
Биты меняющие свое состояние, при переходе от одного числа к другому, обозначены красным цветом.
Используйте такую схему для преобразования Кода Грея в двоичный код.
Примечание:
*Код Грея может логически преобразовываться в двоичный код когда терминал Vin подключается к 0 V.
**Инвертор
***Исключающее или
Gray-Excess-Code
Обычный одношаговый Грей-код подходит для разрешений, которые могут быть представлены в виде числа возведенного в степень 2. В случаях, где надо реализовать другие разрешения из обычного Грей-кода, вырезается и используется средний его участок. Таким образом, сохраняется «одношаговость» кода. Однако числовой диапазон начинается не с нуля, а смещяется на определенное значение. При обработке информации от генерируемого сигнала отнимается половина разницы между первоначальным и редуцированным разрешением. Такие разрешения как, например, 360° для выражения угла часто реализируются этим методом. Так 9-ти битный Грей-код равный 512 шагов, урезанный с обеих сторон на 76 шагов будет равен 360°.
Датчик угла поворота, также называемый энкодер, предназначен для преобразования угла поворота поворотного механизма (вала) в электрические сигналы. Энкодеры могут быть контактными магнитными, оптическими и др. Мы рассмотрим самые распространенные — оптические. Устройство оптического датчик угла поворота (оборотов) состоит из светоизлучателей (чаще применяются инфракрасные светодиоды), фотоприемников (фототранзисторов), и проходящего между светоизлучателем и светоприемником кодового диска, который имеет прозрачные участки. Рисунок на кодовом диске энкодера называют растр. По количеству тактов (или времени между двумя тактами) определяется положение (скорость вращения).
С помощью одного светодиода и одного фототранзистора можно измерять скорость вращения или перемещение без учета направления вращения. Такой датчик сложно назвать энкодером, так как, при реверсе нет возможности точно определить положение или направление вращения. Это просто датчик скорости вращения.
Конструктивное исполнение датчиков вращения:
Энкодеры подразделяются на инкрементальные энкодеры (квадратурные энкодеры) и абсолютные энкодеры. Инкрементальные энкодеры, формируют импульсы, по которым принимающее устройство определяет текущее координаты путем подсчета числа импульсов. Для привязки системы отсчета к началу координат инкрементальные датчики перед началом работы должны быть установлены в начальное положение.
Простой инкрементный энкодер позволяет определить направление вращения. Для изготовления модели инкрементного энкодера достаточно два фототранзистора, одного светодиода. Принцип работы следующий. Светодиод постоянно светит сквозь вращающийся диск с отверстиями на принимающие фототранзисторы. Отверстия в диске энкодера сделаны таким образом, чтобы были положения, при которых диск закрывает оба фототранзистора, и открывает оба. При вращении диска энкодера, фототранзисторы открываются и закрываются в определенной последовательности. Именно по последовательности переключений и можно определить направление вращения. Например, если были «засвечены» оба фототранзистора, то при вращении в одну сторону диск закроет сразу один фототранзистор, а при вращении в другую — другой. Зная, какой фототранзистор был закрыт после засветки обеих, определяем направление вращения.
В старых компьютерных мышках, в которых применялся шарик, присутствовали два аналогичных энкодера. В них использовались специальные фототранзисторы «2 в одном»:
В нашей конструкции мы используем два отдельных фототранзистора:
Иногда требуется знать положение сразу после включения устройства. Т.е. нет технической возможности вывести устройство в исходное положение и затем по количеству «кликов» оценить положение.
Абсолютный энкодер показывает текущую координату сразу при включении, без необходимости предварительной установки в исходное положение. Простейший пример — датчик направления ветра для метеостанции. При включении станции надо сразу определить направление ветра, т.е. угол поворота. Энкодер имеет элементы излучения (светодиоды) и фотоприемники (фототранзисторы), между ними вращается диск энкодера. В определенном положении засвечиваются те или иные фототранзисторы. По комбинации включенных транзисторов определяем положение вала. Промышленные энкодеры имеют большоее количество разрядов, следовательно, имеют высокую точность. Зачастую имеют несколько дисков, связанных через шестерни. Некоторые энкодеры снабжаются последовательным интерфейсом. Но в основе их работы заложен тот же принцип.
Ниже приведена модель 4 разрядного абсолютного энкодера с кодом Грея. 4 разряда — это 16 секторов — 360/16 = 22,5 градуса приемлемая точность для измерения направления ветра. Если возникают проблемы с габаритами, конструктивно диск можно разделить на части. В приведенном примере так и сделано.
Исходный растр диска:
разбит на два диска:
Между дисками установлена двусторонняя плата со светодиодами, за дисками фототранзисторы. Таким образом были уменьшены габариты.
Внимательный читатель мог заметить, что растр кодового диска абсолютного энкодера не соответствует обычному двоичному коду. В энкодерах применяют специальный код Грея.
Что такое код Грея? Представьте себе некоторое устройство, скажем датчик положения, которое выдает положение в двоичном виде по трем проводам. На выходе могут быть следующие комбинации в двоичном коде:
000 001 010 011 100 101 110 111
Обратите внимание на момент перехода из состояния 001 в состояние 010. Переключаются одновременно два бита. Но, в реальности, одновременно переключение не происходит. В любом случае, один из разрядов переключится раньше в силу различных технических причин. При этом на выходе можем получить ошибочные значения 000 или 011. Френк Грей придумал код, похожий на двоичный (http://ru.wikipedia.org/wiki/Код_Грея), но при переходе к следующему числу изменяется только один бит см. таблицу. В этом случае, в момент переключения, состояние меняет только один вывод (разряд), что исключает появление ошибочных значений. Код Грея применяется во всех промышленных энкодерах.
| № | Двоичный код B(3) | Код Грея G(3) |
|---|---|---|
| 1 | 000 | 000 |
| 2 | 001 | 001 |
| 3 | 010 | 011 |
| 4 | 011 | 010 |
| 5 | 100 | 110 |
| 6 | 101 | 111 |
| 7 | 110 | 101 |
| 8 | 111 | 100 |
Наиболее важный параметр прибора – число импульсов, которые образуются в течение совершения одного оборота. Это так называемая разрядность энкодера. Иногда ее еще называют разрешением или разрешающей способностью. Как правило, параметры разрешающей способности равны 1 024 за каждый оборот.
Среди прочих важных конструктивных параметров выделяют:
- Рабочее напряжение на устройстве.
- Тип вала – он может быть как пустым, так и сплошным.
- Размеры вала и отверстия.
- Способ выхода.
- Габариты корпуса устройства.
- Метод крепления.
Разновидности энкодеров
Любой энкодер представляет собой поворотный датчик. Самая простая его конструкция оснащается ручкой, которая может осуществлять повороты в разные стороны. От того, на сколько углов было совершено вращение, а также от направления вращения и будет зависеть цифровой сигнал на выходе.
Эти устройства принято разделять по таким критериям:
- инкрементные и абсолютные;
- оптические, магнитные и механические.
Энкодер инкрементного типа образует импульсы, которые определяются устройством считывания информации. Это и позволяет им определять положение того или иного объекта, а также подсчитывать количество импульсов.
Когда устройство приводится в работу, настоящее положение целевого объекта еще неизвестно. Для того чтобы подключилась система отсчета, используется нулевая отметка. Через нее вал проходит после включения энкодера.

При всех своих плюсах, данная разновидность устройств имеет некоторые недостатки. Например, то, что определение пропуска импульсов от преобразовательного устройства невозможно. Порой это способствует накоплению ошибок во время определения угла поворота. Чтобы избежать этого, применяют пару каналов измерения – синусные и косинусные.
Абсолютные энкодеры имеют специальный поворотный круг, который разделен на специальные секторы, как правило, имеющие одинаковые размеры и пронумерованные. Когда устройство включается в работу, выдается тот или иной номер сектора, где оно находится в данный момент. Отсюда и название – абсолютный энкодер. Данная конструктивная особенность позволяет быстро определить как угол, так и положение, а также направление вращения. Данные параметры определяются относительно нулевого сектора диска.

Абсолютные угловые датчики не требуют соединения системы отсчета с нулевым значением. Для начала определения положения и иных показателей в них применяется так называемый код Грея. Именно он позволяет избегать ошибок.
Можно назвать лишь один недостаток данного типа датчика – это необходимость постоянного перевода в двоичные коды для определения положения. Оптический тип датчика конструктивно предусматривает наличие оптического растрового диска, который закрепляется на вал. Когда тот вращается, формируется световой поток, затем он воспринимается фотоприемником.
Оптические энкодеры абсолютного типа – это устройства, в которых каждая позиция вала обладает своим выходным цифровым кодом, являющимся главным показателем для устройства. Согласно ему и производятся вычисления, а также закрепление параметров передвижения диска.
Существует также магнитная разновидность энкодеров, которые регистрируют движение подвижных магнитных элементов. Затем данные переводятся в определенные сигналы, понятные системе.

Наконец, механические энкодеры. Они имеют диск, изготовленный из диэлектрика, на котором нанесены выпуклые, либо непрозрачные области. Значение абсолютного угла считывается при помощи линейки контактов и переключателей. Здесь также работает код Грея. Он позволяет устранить неоднозначные интерпретации сигналов.

В качестве минусов данных типов энкодеров можно назвать разбалтывание контактов со временем. Это будет приводить к тому, что сигнал подвергнется искажению, выдавая не всегда достоверные подсчеты. Датчики оптических и магнитных моделей лишены данного недостатка.
Кроме того, различают одно- и многооборотные энкодеры. Однооборотным является датчик, выдающий показания по абсолютному значению в рамках вращения на 360 градусов, то есть внутри одного оборота. После того, как оборот будет совершен, код начинает считываться заново. Обычно датчики таких моделей находят свое применение в антенных системах, коленчатых прессах и т.п.
Многооборотные устройства, как несложно догадаться, рассчитаны на счет кодов в течение определенного числа оборотов. К примеру, для линейных проводов, либо для измерительных задач при помощи зубчатых измерительных штанг данный подход считается неприменимым. Тогда выручают датчики, которые не только измеряют углы поворотов внутри одного вращения, но и регистрируют количество вращений посредством особого передаточного устройства.
Особенности настроек и подключения
Монтажом энкодеров должен заниматься только профессиональный мастер. Они монтируются обычно на том валу, с которого считывается информация. Применяются переходные муфты для компенсации различия размеров. Корпус энкодера необходимо как можно более прочно закрепить.
Если же речь идет о монтажных работах на полом валу, то требуется прибегнуть к иному методу. В этом случае вал включается внутри датчика и монтируется внутри полой втулки. При этом сам корпус считывающего устройства закреплять не следует.
Если брать самый элементарный случай подключения, то, по возможности, следует подключить выход преобразователя к входу счетного устройства, и запрограммировать его на определенные параметры скорости.
В основном, преобразователи применяются совместно с контроллерами. К преобразователю необходимо присоединить нужные выходы. После этого программой будет автоматически определено, какое положение объект занимает в данный момент времени, какова его скорость, каким ускорением он обладает.
Характеристики
Каждая разновидность энкодера имеет свои особенности и характеристики:
- Величина импульсов, которая производится в момент одного оборота диска в процессе работы. Может варьироваться от 1 до 5 тысяч импульсов.
- Для абсолютных энкодеров важна такая характеристика, как разрядность бит или их количество.
- Тип вала, используемого в устройстве, может отличаться — он бывает с прямой осью или полый.
- Учитывается разновидность используемого фланца на валу под шпонку.
- Сигнал при выходе может отличаться.
- Уровень напряжения питания.
- Используемый тип разъема и длина кабеля.
В зависимости от сложности устройства и возможности выдерживать различные нагрузки, отличается и сфера применения. Простые датчики имеют минимальное оснащение и используются в несложных механизмах. Высокоточные устройства с высокой производительностью, защитой от температурного воздействия или взрывов применяются в промышленности и сложных технических устройствах.
Где может быть использовано устройство
Существует немало сфер и областей, в которых энкодеры нашли широкое применение. Достаточно рассмотреть наглядные примеры использования этих устройств, чтобы убедиться в их популярности:
- В механизмах, работающих для нужд печатной промышленности, эти датчики контролируют вращение валов, по которым проходит бумага и краска.
- На предприятиях, где ведется металлообработка, они задействованы при вращении валов с металлическими лентами.
- При конструировании различных моделей и устройств в области робототехники помогают контролировать движение различных частей робота.
- В автомобилестроении с помощью датчиков определяется угол поворота колеса.
- Городское хозяйство нельзя представить без лифтов – для их работы также требуются энкодеры.
- В пищевой и химической промышленности необходимо постоянно фасовать продукцию в больших объемах. Этим занимаются автоматизированные устройства, в которых установлены энкодеры.
- Даже в домашних условиях можно легко найти предмет, в котором есть энкодер — это компьютерная мышь, которая есть практически в каждой квартире.
- В различных электротехнических устройствах, например, сервомоторах, требующих высокой точности, также установлены датчики.
В зависимости от сферы использования и особенностей устройства, энкодеры могут решать различные задачи. Они измеряют угловые положения, помогают определить позиционирование объектов, детектируют положение в пространстве, могут проводить определение позиций с высокой точностью, а также измерять вращательные движения.
Энкодеры. Виды и работа. Особенности и применение
Коротко энкодеры можно назвать преобразователями угловых перемещений. Они служат для модификации угла поворота объекта вращения, например, вала какого-либо механизма, в сигнал электрического тока. При этом определяется не только угол поворота вала, но и его направление вращения, а также скорость вращения и текущая позиция относительно первоначального положения.
Наиболее популярными энкодеры стали при их использовании в системах точного перемещения, на станкостроительных заводах, в производственных комплексах с применением робототехники, в измерительных устройствах, в которых необходима регистрация точных измерений наклонов, поворотов, вращений и углов.
Виды и принцип действия
Энкодеры – это датчики поворота. Простейший датчик имеет ручку, которая может поворачиваться по часовой стрелке или против нее. В зависимости от угла поворота и направления выдается цифровой сигнал, информирующий о том, в каком положении находится ручка, либо в какую сторону она была повернута.
У такого энкодера, показанного на рисунке, ручка также может применяться в качестве кнопки. Это является вспомогательной функцией конкретного вида энкодера.
По типу выдаваемых данных энкодеры делятся на две большие группы:
- Абсолютные.
- Инкрементальные.
Абсолютные энкодеры
У абсолютного энкодера весь круг поворота разделен на определенное количество секторов, чаще всего одинакового размера. Эти сектора пронумерованы. Энкодер при работе выдает номер сектора, в котором на данный момент он находится. Поэтому он и называется абсолютным. У этого типа энкодера всегда можно определить, на какой угол относительно нулевого сектора повернут энкодер в конкретный момент, то есть, при повороте он выдает значения номеров секторов, до максимального значения. Далее он переходит снова на ноль.
Если вал энкодера поворачивать в другую сторону, то он начнет выдавать противоположные значения. В нашем случае у него используется пять выводов для выдачи значений поворота.
У данного алгоритма имеются свои недостатки. Из таблицы 1 виден порядок выдаваемых значений n-го энкодера. Стоит обратить внимание на две последние строчки, переход от 127 на 128.
Таблица 1
Здесь меняются абсолютно все биты. В идеальном энкодере они все меняются одновременно и нет никаких проблем. Практически в реальном энкодере биты меняются быстро, однако не одновременно. И в какой-то момент на выходе энкодера оказывается совершенно произвольное значение. Так как меняются все биты, следовательно, у энкодера будет произвольное значение от нуля до всех единиц.
Справа изображен пример такого переключения. Чем это может грозить? Разберем пример. Микроконтроллер с помощью двигателя управляет валом и поворачивает его на определенный угол. В определенный момент при переключении со 127 на 128 ячейку он получает определенное случайное значение. Контроллер делает вывод, что вал находится совершенно в другом месте, в отличие от фактического места, и начинает его вращать в другую сторону, с другой скоростью и т.д.
Через определенное время микроконтроллер получает правильное значение, начинает пытаться остановить вал и вращать его в правильную сторону. Такой процесс может продолжаться долго, при условии, что такая ошибка будет встречаться часто. Такие ошибки являются нерегулярными, и вычислить их достаточно сложно.
Код Грея
Выше описанная проблема решается с помощью введения кода Грея. Особенностью кода Грея является то, что при переключении энкодера на единицу, значение кода Грея меняется также на единицу. Меняется только один вид. Это видно в таблице 2 в сравнении двоичного кода и кода Грея.
Таблица 2
Первые две строчки совпадают, но уже во второй строчке поменялся средний бит. Далее также меняется один бит. Также стоит отметить, что последний и первый код Грея отличается на один бит, то есть код Грея может зациклиться.
Преимуществом данного кода является то, что ошибка, которая рассмотрена выше, невозможна. Из недостатков можно отметить, что микроконтроллеру необходимо переводить код Грея в двоичный код для того, чтобы понять, в каком положении находится абсолютный энкодер.
Инкрементальные энкодеры
Следующим типом является инкрементальный энкодер, который имеет более простую структуру. Но при этом он не показывает конкретное место положения своей ручки. Он показывает только направление поворота, а число делений поворота должен считать микроконтроллер.
У инкрементального энкодера есть набор полосок, которые по умолчанию подключены к земле, и при повороте они замыкаются и размыкаются. Получается сигнал, изображенный на рисунке (похож на меандр). Таких круговых полосок у энкодера две. Полоски смещены на одну четверть, и сигналы также смещены между собой на четверть. Это важно, так как позволяет определить направление вращения.
Схему инкрементального энкодера можно представить по правому рисунку. Кнопки обозначают периодические подключения энкодера к земле. Так как внутри энкодер не подключается к логической единице, то необходимо снаружи самостоятельно подтянуть логические единицы через резисторы к выводу энкодера. В этом случае, когда ни одна из ножек у энкодера не подключена к земле, на ножках будет логическая единица.
Если энкодер подключил к земле какую-то ножку, то на этой ножке будет логический ноль. В спокойном состоянии у энкодера на выходе логическая единица. При начале вращения энкодера в любую сторону, то сначала один вывод подключается к земле, затем другой. Далее эти выводы по очереди отключаются от земли, и на них опять образуется логическая единица.
Определить направление поворота можно по тому, какой из выводов раньше подключился к земле. При подсчете полных циклов можно посчитать количество щелчков поворота энкодера.
Фактически у энкодера имеется четыре состояния:
- Две единицы.
- Ноль и единица.
- Ноль и ноль.
- Единица и ноль.
Три состояния, которые не равны единицам, являются неустойчивыми, и в них энкодер не может находиться. Во многих микроконтроллерах реализована функция подсчета поворотов с помощью таймеров, у которых есть определенные входы. Таймер считает на аппаратном уровне, на сколько щелчков и в какую сторону был повернут энкодер, и выдает значение. То есть, счетчик инкрементирует какое-либо число.
По изменению этого числа можно определить, на сколько щелчков был повернут энкодер. По количеству щелчков можно определить и угол поворота. Энкодер также имеет дребезг контактов, который усложняет анализ сигналов.
Оптические энкодеры
Подобный преобразователь выполнен в виде диска, зафиксированного на валу, и изготовленного из стекла. Оптический датчик поворота отличается от других видов дополнительным оптическим растором, перемещаемым при повороте вала. При этом он превращает момент вращения в световой поток, который далее принимается фотодатчиком.
Оптический преобразователь запоминает углы вращения. При этом каждому отдельному положению соответствует особый цифровой код, который вместе с числом оборотов образует единицу измерения датчика. Энкодер подключается и работает по аналогии с инкрементальным датчиком.
По характеру функционирования они разделяются на фотоэлектрические и магнитные. Принцип работы магнитных основан на использовании эффекта Холла, который был впервые открыт в 1879 году. При этом разность потенциалов появляется только при расположении провода постоянного тока в магнитное поле.
По точности и свойствам разрешения магнитный вид датчика уступает фотоэлектрическому, однако по конструкции он проще, менее требователен к условиям работы и пространству. Магнитный энкодер является прибором, который фиксирует прохождение магнитного полюса магнита при вращении, находящегося рядом с чувствительным элементом. Информация передатчика выражается в цифровом коде.
Фотоэлектрический энкодер является датчиком, работающим на основе фотоэлектрического принципа. Этот эффект наблюдается при воздействии светового потока на вещество. Этот принцип был открыт в 1887 году. При эксплуатации такого датчика происходит постоянное преобразование луча света в сигнал электрического тока.
Аналогами фотоэлектрического энкодера являются оптоэлектронный, оптический и оптронный. Эти датчики наиболее чувствительны к характеристикам изготовления, эксплуатации и другим факторам, по сравнению с другими моделями. Однако это оправдывается их повышенной точностью, в отличие от конкурентов.
Похожие темы:
Принцип работы энкодера| Encoder Animation
Кодеры используются для преобразования вращательного или линейного движения в цифровой сигнал. Обычно это делается для контроля или управления параметрами движения, такими как скорость, скорость, направление, расстояние или положение.
Оптические кодеры обычно состоят из вращающейся и стационарной электронной схемы. Ротор обычно представляет собой металлический, стеклянный или пластиковый диск, установленный на валу датчика.Диск имеет своего рода оптический шаблон, который электронным образом декодируется для генерации информации о местоположении.
Диск ротора в абсолютном оптическом кодере использует непрозрачные и прозрачные сегменты, расположенные по схеме серого кода. Статор имеет соответствующие пары светодиодов и фототранзисторов, расположенных таким образом, что светодиодный свет проходит через прозрачные участки диска ротора и принимается фототранзисторами на другой стороне. После того, как электронные сигналы усиливаются и преобразуются, они становятся доступными для оценки позиции
Что означает кодировщик слов?
Что означает кодировщик слов? Датчик представляет собой электромеханическое устройство, которое может измерять смещение.Кодеры обычно представляют собой цифровые датчики смещения, состоящие из механического элемента и чувствительной головки, обычно оптического типа.
Механический элемент может быть диском (для энкодеров поворотного типа) или линейкой (для энкодеров линейного типа) с нанесенными или резными рисунками. Чувствительная головка включает в себя источник света (светодиод) и датчик света (фотодетектор) для считывания сгенерированного кода (выходной сигнал кодера).
Как можно измерить угол поворота диска?
С этим кодером смещение получается путем подсчета количества раз, когда происходят переходы между логическими значениями «0» и «1».Это позволяет преобразовывать физические величины путем преобразования изменений углового смещения в выходной сигнал электрического типа, который переводится в логические значения с помощью подходящей электроники.
Подсчет количества переходов, которые происходят в (отражающем / непрозрачном и неотражающем / прозрачном) секторах диска, связан с концепцией разрешения.
Разрешение может быть определено как наименьшее изменение измеряемой величины, которое вызывает заметное изменение в соответствующем результате.В этом случае разрешение диска соответствует его минимальному угловому изменению, которое вызывает переход на уровне логического выхода. Поскольку есть девять 0 к 1 переходам в полном вращении диска.
Какие существуют разные типы кодеров?
Наиболее широко используемая классификация относится к типу движения (линейное или вращательное). В обоих случаях они могут быть инкрементными, полу-абсолютными или абсолютными.
Дополнительная информация получается путем простого подсчета импульсов.Следовательно, это зависит от предыдущего состояния и стоимости перехода. Его самый большой недостаток заключается в необходимости определения исходного положения: эта информация теряется всякий раз, когда система выключается или выключается.
Напротив, в абсолютных энкодерах (углового или линейного типа) каждая позиция должным образом обозначена уникальным кодом, приведенным выше рисунка, который соответствует уникальной комбинации битов в различных дорожках. Таким образом, позиция всегда известна, и нет необходимости определять эталон, если система выключена или выключена.
Полуабсолютные датчики обычно вращаются и используются, когда необходимо измерить смещения, которые превышают диапазон измерения абсолютного датчика. В этом случае необходимо использовать дополнительную процедуру для подсчета количества оборотов диска во время измерения.
Абсолютный энкодердля вашего мотора
Как и любой другой, абсолютный энкодер предоставляет важные данные, касающиеся позиционирования и скорости конкретного устройства. Для этого он подсчитывает количество импульсов на один или несколько оборотов вала. Электромеханические устройства преобразуют механическое движение вала или оси в аналоговые или цифровые выходные сигналы и передают сигналы на контроллер (или другое доступное устройство управления).
Таким образом, датчики позволяют отслеживать точное положение, скорость, направление или скорость известного двигателя.Хотя способ, которым устройство определяет движение, может варьироваться, человек может выбирать из множества кодеров, которые работают по-разному и имеют разные способы реализации.
по сравнению с абсолютным
В зависимости от типа выхода кодировщики могут быть как абсолютными, так и инкрементными.
Устройства инкрементного типа сообщают об изменениях положения двигателя, не сообщая о том, куда именно двигался двигатель. Абсолютные указывают как изменение положения двигателя, так и точное местоположение в момент запроса.
Выход инкрементного устройства представляет собой непрерывную последовательность импульсов — сдвинутых по фазе прямоугольных сигналов. Все измерения привязаны к начальной точке. Чтобы определить состояние двигателя, необходимо знать, где находится точка, и подсчитать приращения (импульсы). Выход абсолютного кодера представляет собой сложный сигнал в цифровых битах, где каждый бит соответствует известной позиции.
Преимущества абсолютного энкодера Rozum
Высокое разрешение в сочетании с высоким уровнем ориентации
Более быстрое и лучшее восстановление в случае сбоя системы или питания
Варианты оптического или магнитного измерения по принципу
Варианты с одним или несколькими поворотами
Определяет точное положение объекта и берет под контроль доступные электронные данные
Непрерывный непрерывный контроль положения
Точное обнаружение движения по нескольким осям
Где это можно использовать?
Такой кодер не использует дополнительные устройства и сам обрабатывает информацию о местоположении.Таким образом, его можно использовать для приложений, когда помимо абсолютного энкодера другие внешние компоненты недоступны или отсутствуют.
Давайте рассмотрим некоторые примеры того, как абсолютные кодеры используются в реальной жизни:
Может определять многоосную ориентацию для станков с ЧПУ при изготовлении деталей.
Высокоточное позиционирование нескольких стабилизаторов для любых крупных транспортных средств, таких как краны или подъемники
Позиций нескольких стабилизаторов в сателлитах
Точное определение необходимой высоты ножничных кроватей, обычно используемых в больницах
Включение движения автоматических дверей без ограничений
Обеспечение эффективной работы роботизированной машины, плавное продолжение движения даже после того, как она пострадала и претерпела сбой питания
Может использоваться в пьедесталах, подвесах и т. Д.
Таким образом, благодаря своему очевидному превосходству в точности позиционирования, которое влияет на общую производительность приложения, кодеры могут использоваться в любой автоматизированной отрасли.
Точное позиционирование серводвигателей RDrive
Идеально, если точность скорости и позиционирования предпочтительнее, чем простота самой системы. Rozum Robotics создала замкнутую систему управления движением с двумя энкодерами, встроенными в серводвигатели RDrive.В этой системе контроллер отправляет команду на двигатель и получает сигнал обратной связи с данными о положении и скорости от устройств.
Мы выбираем абсолют
В серводвигателях RDrive используются датчики абсолютного типа. Такие устройства устойчивы к перебоям питания и прерываниям сигнала, потому что они не требуют привязки к начальной точке. Вы можете прочитать точное состояние двигателя сразу после включения. Вы также обнаружите, что информация о местонахождении абсолютного энкодера сохраняется независимо от того, включено или выключено питание, — это окажет огромную помощь!
Почему магнитные лучше?
Технология магнитного зондирования является лишь одним из многих доступных вариантов измерения.Основываясь на предпочтениях и требованиях, датчики также могут проводить измерения с использованием оптических, механических, индуктивных или проводящих методов измерения.
Magnetic включают в себя следующие основные компоненты: диск с полосками намагниченного материала, датчики, контур кондиционирования. Датчики могут отслеживать изменения напряжения (устройства с эффектом Холла) или магнитного поля (магниторезистивные устройства) и преобразовывать полученные данные в синусоидальную волну. Схема кондиционирования обрабатывает сигналы датчика для получения выходного сигнала в требуемой форме.
Для Rozum Robotics абсолютные магнитные энкодеры имеют ряд очевидных преимуществ:
Устройства могут работать в грязной / пыльной среде и при воздействии других неферромагнитных загрязнений
Допустимый воздушный зазор до 4 мм
Они устойчивы к теплу, влажности, ударам и вибрации
Они компактны, дешевы и прочны (не требуют корпуса для работы в тяжелых условиях)
Нет движущихся частей
Устройства могут быть адаптированы к конкретному применению
Как это помогает с управлением движением RDrive
Система управления движением серводвигателей RDrive является замкнутой: она не только получает команды управления движением от устройства управления, но и обеспечивает обратную связь по их выполнению.Система состоит из контроллера собственной разработки и двух абсолютных энкодеров.
Работа системы управления движением включает в себя следующие взаимодействия:
Контроллер получает управляющую команду от устройства управления (например, ПК или ведущего устройства CAN) и подает ток на бескаркасный двигатель переменного тока для создания движения с требуемыми параметрами.
Два абсолютных датчика контролируют абсолютные положения ротора и выходного вала и отправляют обратную связь на контроллер.
Контроллер обрабатывает обратную связь и сравнивает полученные значения с управляющей командой. При необходимости он также регулирует положение двигателя и другие параметры.
Контроллер получает и обрабатывает сигналы обратной связи от термистора NTC в обмотке двигателя.
Когда значение, основанное на показаниях термистора, превышает предел максимальной температуры, контроллер отключает сервопривод.
Обратная связь по движению
СервомоторыRDrive содержат два встроенных устройства обратной связи — абсолютные магнитные энкодеры. Они монтируются на отдельной плате, которая соединяется с платой контроллера с помощью плоского кабеля (линия BiSS). Одно из устройств выдает информацию об абсолютном положении выходного вала, а другое — об обмотке ротора.
Данные кодировщика
Реализация управления движением
Вы можете реализовать управление движением серводвигателей RDrive одним из двух способов: на основе связи CANOpen или через интерфейс прикладного программирования (API).Наш продукт является гарантией надежной обратной связи без ссылок.
RDrive абсолютны и магнитны!
Абсолютные энкодеры, встроенные в серводвигатели RDrive, могут похвастаться точностью 19 бит, они являются частью всех наших двигателей: RDrive 50 (диаметр 53 мм, длина 85 мм), RDrive 60 (диаметр 63 мм, длина 89 мм) ), RDrive 70 (диаметр 73 мм, длина 105 мм), RDrive 85 (диаметр 88 мм, длина 112 мм), RDrive 110 (диаметр 115 мм, диаметр 150 мм). Одно из устройств контролирует угловое движение и скорость выходного вала.Другой обеспечивает обратную связь по угловому положению и скорости вращения вала ротора.
Встроенные абсолютные магнитные энкодеры позволяют проводить точные измерения положения и скорости даже в тяжелых промышленных условиях. Они невосприимчивы к колебаниям температуры и влажности, ударам, вибрации и загрязнениям, которые не являются ферромагнитными. Кроме того, обратная связь от устройств доступна сразу после включения, даже после сбоя.
,Неверный адрес электронной почты или пароль. Пожалуйста, попробуйте еще раз.
Posital
Инкрементный или Абсолютный?
Задачи позиционирования требуют точных значений положения для контроля или управления движением. Во многих приложениях определение положения выполняется с помощью поворотных энкодеров, также называемых валовыми энкодерами или просто энкодерами.Эти датчики преобразуют механическое угловое положение вала или оси в электронный сигнал, который может обрабатываться системой управления.
Абсолютные ротационные энкодеры
Абсолютные энкодеры способны выдавать уникальные значения положения с момента их включения. Это достигается путем сканирования позиции кодированного элемента. Все позиции в этих системах соответствуют уникальному коду. Даже движения, которые происходят, когда система отключена от питания, преобразуются в точные значения положения, когда энкодер снова включается.
- Несколько вариантов интерфейса: аналоговый, Ethernet, полевая шина, параллельный, последовательный
- однократная и многооборотная революция
- Разрешение до 16 бит
- Оптический и магнитный принцип измерения
Подробнее
Абсолютный энкодерProduct Finder
Инкрементальные энкодеры
Инкрементные датчики генерируют выходной сигнал каждый раз, когда вал вращается на определенную величину. (Количество сигналов за ход определяет разрешение устройства.Каждый раз, когда энкодер включен, он начинает отсчет с нуля, независимо от того, где находится вал. Поэтому начальное возвращение к контрольной точке неизбежно во всех задачах позиционирования, как при запуске системы управления, так и всякий раз, когда подача питания на датчик прерывается.
- A, B, Z и инвертированные сигналы как HTL (Push-Pull) или TTL (RS422).
- Количество импульсов до 16384 Доступно импульсов на оборот
- Функциональность гибкого масштабирования
- Принцип магнитных измерений
Подробнее
Инкрементный энкодер
скачиваний
ПОЗИТАЛ Поиск продукта

Большое разнообразие — легко выбрать
БольшеХотите узнать больше?
Контакт

Найдите ПОЗИТАЛЬНОГО партнера в вашем регионе!
Больше© FRABA B.V. Все права защищены.
,Определение углового и линейного движения является ключевой функцией при управлении машинами на заводе электроники. Микрокомпьютеры в этих машинах часто нуждаются в информации о положении, направлении вращения и скорости вращения вала или оси, которые необходимо преобразовать в цифровую форму. Оптические энкодеры — это электромеханические устройства, используемые для измерения угловых или линейных положений. Те, которые используются для углового обнаружения, обычно называют поворотными или валовыми энкодерами.Они все чаще используются для множества рабочих мест в потребительском и промышленном оборудовании. Вращающиеся датчики или датчики вала, в принципе, могут быть абсолютными или инкрементальными. Абсолютный энкодер предоставляет информацию о положении при потере мощности, тогда как инкрементальный энкодер используется там, где требуется информация о скорости и направлении. Оба могут использоваться как с угловыми, так и с линейными смещениями, но они работают по-разному. Давайте подробно рассмотрим, чем они отличаются друг от друга.
Что такое абсолютный кодер?
Абсолютный датчик имеет уникальный код для каждой позиции вала, который представляет абсолютную позицию датчика.Он напрямую обеспечивает цифровой выход, представляющий абсолютное смещение. Значение фактического положения измеряется сразу же после включения системы. Таким образом, абсолютный датчик не нуждается в счетчике, так как измеренное значение получено непосредственно из шаблона градации. Он обеспечивает цифровой выход, соответствующий позиции непосредственно. Каждая позиция бита кодируется отдельно через выделенную пару светодиодов. Каждый код представляет абсолютное угловое положение вала при его вращении.Диск абсолютного кодера использует код Грея, в котором изменяется один бит за раз, что уменьшает ошибки связи кодера. Их можно разделить на однооборотные и многооборотные энкодеры.
Что такое инкрементный кодер?
Инкрементный датчик представляет собой электромеханическое устройство, которое преобразует угловое положение вала в цифровые или импульсные сигналы. Он генерирует определенное количество импульсов за оборот, обеспечивая импульс для каждого приращения, соответствующего обороту.Он может измерять изменение положения, а не абсолютное положение. Следовательно, он не может указывать позицию относительно известной ссылки. Количество генерируемых импульсов пропорционально угловому положению вала. Инкрементные энкодеры используются в приложениях, где требуется информация о скорости или скорости и направлении. Каждый раз, когда устройство включается или сбрасывается, оно начинает отсчет с нуля и генерирует выходной сигнал каждый раз, когда вал движется. Типы инкрементного кодера могут быть дополнительно подразделены на квадратурные кодеры и тахометры.
6 ”src =” http://www.differencebetween.net/wp-content/uploads/2019/05/Difference-Between-Absolute-and-Incremental-Encoders.jpg ”alt =” ”width =” 288 ″ height = ”384 ″>
Разница между абсолютным и инкрементальным кодировщиками
Основы абсолютного и инкрементального кодировщика
— Оба являются электромеханическими устройствами, используемыми для измерения угловых или линейных положений вала и преобразования их в цифровые или импульсные сигналы. Абсолютный энкодер имеет уникальный код для каждой позиции вала, который представляет абсолютную позицию энкодера, в то время как инкрементальный энкодер генерирует выходной сигнал каждый раз, когда вал вращается на определенный угол, а количество генерируемых импульсов пропорционально угловому положению вал.Инкрементный датчик может измерять изменение положения, а не абсолютное положение.
Принцип действия абсолютных и инкрементальных кодеров
— абсолютный датчик состоит из диска с двоичным кодом, установленного на валу так, что он вращается вместе с валом. Благодаря нескольким выходным каналам, каждое угловое положение вала описывается собственным уникальным кодом. Количество каналов увеличивается с увеличением требуемого разрешения. В отличие от инкрементального датчика, это не счетное устройство, которое не теряет информацию о местоположении при потере питания.Инкрементный датчик, с другой стороны, обеспечивает выходной сигнал для заданного приращения углового положения вала, который определяется путем подсчета выходных импульсов по отношению к точке отсчета.
Экономическая эффективность
— Кодовая матрица диска кодера является более сложной, и поскольку требуется больше датчиков освещенности, абсолютный кодер обычно стоит вдвое дороже, чем инкрементальные кодеры. Разрешение ограничено количеством дорожек на диске кодера, поэтому получение более точных разрешений становится дороже без добавления дополнительных дорожек.Инкрементные энкодеры, напротив, менее сложны, чем их абсолютные аналоги, поэтому, как правило, дешевле.
Стабильность
— Абсолютные энкодеры могут предложить лучшую производительность, точные результаты и снизить общие затраты. Благодаря способности показывать абсолютные углы, даже если пропущено, это не повлияет на следующее чтение. Конкретное чтение не зависит от точности предыдущего чтения. Инкрементальный энкодер, с другой стороны, должен быть включен на протяжении всей работы устройства.Каждый раз, когда отключается питание, показания должны быть повторно инициализированы, или система выдает ошибку. Это замедляет производительность системы. Абсолютные энкодеры не теряют информацию о положении в случае сбоя питания.
Абсолютный и Инкрементальный кодер: Сравнительная таблица
Краткое изложение абсолютных и дополнительных кодировщиков
В двух словах, инкрементный энкодер должен быть включен на протяжении всей работы устройства. В случае сбоя питания чтение должно быть повторно инициализировано, иначе система выдаст ошибку.Напротив, абсолютному энкодеру требуется питание только во время считывания, и благодаря его способности обеспечивать показания абсолютного угла, конкретное считывание не зависит от точности предыдущего считывания. Однако кодовая матрица диска в абсолютном кодере является более сложной, поэтому, как правило, стоит в два раза дороже, чем инкрементный кодер, который, с другой стороны, менее сложен, поэтому стоит дешевле.
Сагар Хиллар — плодовитый автор контента / статей / блогов, работающий старшим разработчиком контента / писателем в известной компании по обслуживанию клиентов, базирующейся в Индии.У него есть желание исследовать разносторонние темы и разрабатывать высококачественный контент, чтобы сделать его наиболее читаемым. Благодаря своей страсти к письму, он имеет более 7 лет профессионального опыта в написании и редактировании услуг на различных печатных и электронных платформах.Вне своей профессиональной деятельности Сагар любит общаться с людьми разных культур и происхождения. Вы можете сказать, что он любопытен от природы. Он верит, что каждый — это опыт обучения, и он приносит определенное волнение, своего рода любопытство, чтобы продолжать.Поначалу это может показаться глупым, но через некоторое время это ослабляет вас и облегчает вам начало разговоров с совершенно незнакомыми людьми — так он и сказал. «
Последние сообщения Сагар Хиллар (см. Все): Если вам понравилась эта статья или наш сайт. Пожалуйста, распространите слово. Поделитесь этим со своими друзьями / семьей.
Цитировать
Сагар Хиллар. «Разница между абсолютными и инкрементными кодировщиками». DifferenceBetween.net. 10 июня 2019 г.
Похожие записи
