Что такое мотор шилд для Arduino. Как выбрать подходящую модель. Какие возможности открывает использование мотор шилда. На что обратить внимание при покупке.
Что такое мотор шилд для Arduino
Мотор шилд — это специальная плата расширения для Arduino, которая позволяет управлять электродвигателями. Он подключается непосредственно к Arduino и предоставляет все необходимые компоненты для подключения и контроля моторов.
Основные функции мотор шилда:
- Управление несколькими двигателями одновременно (обычно 2-4)
- Регулировка скорости вращения
- Изменение направления вращения
- Защита Arduino от высоких токов и напряжений двигателей
- Дополнительные входы/выходы для датчиков и другой периферии
Мотор шилд существенно упрощает создание подвижных роботов, автоматизированных систем и других проектов с использованием моторов на базе Arduino.
Принцип работы мотор шилда
В основе работы мотор шилда лежит использование специализированных драйверов двигателей. Это микросхемы, которые могут управлять высокими токами и напряжениями моторов, получая при этом управляющие сигналы низкого уровня от Arduino.

Типичная схема работы выглядит так:
- Arduino отправляет управляющие сигналы на драйвер двигателя на шилде
- Драйвер преобразует эти сигналы в необходимое напряжение и ток для мотора
- Мотор получает питание и вращается с заданной скоростью и в нужном направлении
- Датчики на шилде могут передавать обратную связь в Arduino для точного контроля
Такая архитектура позволяет Arduino управлять мощными моторами, не подвергая свои чувствительные компоненты риску повреждения.
Ключевые характеристики мотор шилдов
При выборе мотор шилда для Arduino важно обратить внимание на следующие параметры:
Количество каналов
Определяет, сколькими двигателями можно управлять одновременно. Обычно от 2 до 4 каналов.
Максимальный ток
Показывает, насколько мощные двигатели может обслуживать шилд. Типичные значения от 1 до 5 А на канал.
Диапазон рабочих напряжений
Важен для совместимости с вашими моторами и источником питания. Обычно от 5 до 35 В.
Поддерживаемые типы двигателей
Большинство шилдов работают с DC моторами, некоторые также поддерживают шаговые двигатели и серводвигатели.
Дополнительные функции
Могут включать защиту от перегрузки, измерение тока, режим экономии энергии и др.
Популярные модели мотор шилдов для Arduino
Рассмотрим несколько распространенных моделей мотор шилдов и их особенности:
Arduino Motor Shield Rev3
Официальный шилд от Arduino:
- 2 канала
- До 2 А на канал
- Рабочее напряжение 5-12 В
- Поддержка DC и шаговых моторов
- Возможность измерения тока
Adafruit Motor Shield V2
Популярный шилд с широкими возможностями:
- 4 канала для DC моторов или 2 для шаговых
- До 1.2 А на канал
- Рабочее напряжение 5-12 В
- I2C интерфейс для управления
- Возможность каскадирования до 32 шилдов
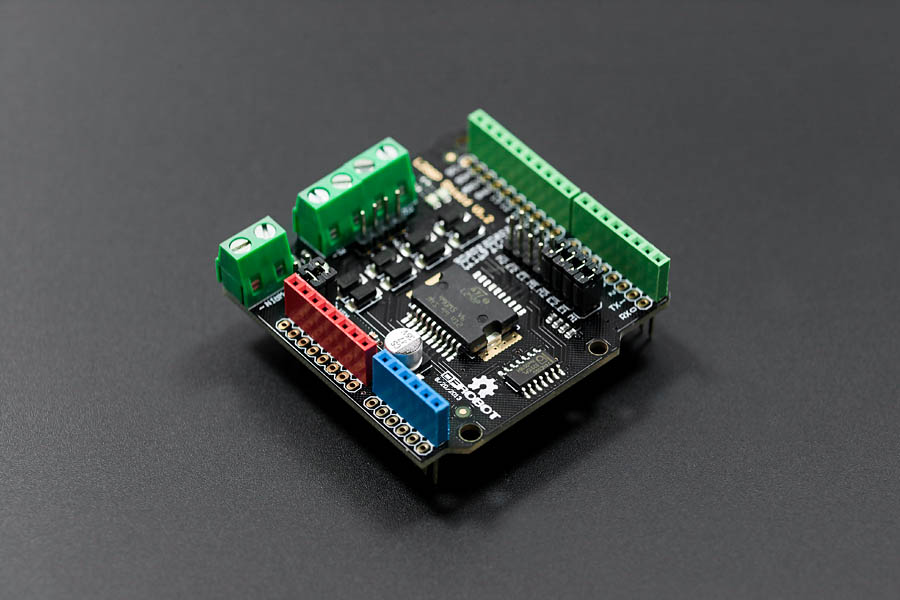
DFRobot L298P Motor Shield
Бюджетный вариант для небольших проектов:
- 2 канала
- До 2 А на канал
- Рабочее напряжение 5-35 В
- Поддержка DC и шаговых моторов
- Встроенный стабилизатор напряжения
Как выбрать подходящий мотор шилд
Чтобы выбрать оптимальный мотор шилд для вашего проекта, ответьте на следующие вопросы:
- Сколько двигателей вам нужно контролировать?
- Какой максимальный ток потребляют ваши моторы?
- Какое напряжение требуется для питания моторов?
- Нужна ли поддержка шаговых двигателей или серводвигателей?
- Требуются ли дополнительные функции (измерение тока, защита и т.д.)?
- Каков бюджет проекта?
Исходя из ответов, вы сможете выбрать модель, которая наилучшим образом соответствует вашим требованиям.

Подключение и настройка мотор шилда
Процесс подключения мотор шилда к Arduino обычно включает следующие шаги:
- Установите шилд на Arduino, совместив все пины
- Подключите внешний источник питания к шилду (если требуется)
- Присоедините моторы к соответствующим выходам на шилде
- Загрузите необходимые библиотеки в Arduino IDE
- Напишите и загрузите скетч для управления моторами
Большинство производителей предоставляют подробные инструкции и примеры кода для своих шилдов.
Применение мотор шилдов в проектах
Мотор шилды находят применение в разнообразных проектах на базе Arduino:
- Мобильные роботы и радиоуправляемые модели
- 3D-принтеры и ЧПУ-станки
- Автоматизированные системы (умный дом, теплицы)
- Игрушки и образовательные наборы
- Дроны и квадрокоптеры
- Автоматические двери и жалюзи
Возможности применения ограничены лишь вашим воображением!
Преимущества использования мотор шилдов
Использование мотор шилда в проекте с Arduino дает ряд существенных преимуществ:
- Простота подключения и использования
- Защита Arduino от повреждений
- Экономия времени на разработку
- Компактность решения
- Расширенные возможности управления моторами
- Совместимость с большинством проектов Arduino
Все это делает мотор шилды незаменимым инструментом для создания подвижных устройств на базе Arduino.

Альтернативы мотор шилдам
Несмотря на удобство мотор шилдов, в некоторых случаях могут быть более подходящие альтернативы:
- Отдельные драйверы двигателей — для проектов с нестандартными требованиями
- Специализированные контроллеры — для сложных роботов и станков
- Транзисторные схемы — для простых проектов с малыми токами
- Реле — для управления очень мощными двигателями
Выбор конкретного решения зависит от специфики вашего проекта и доступных ресурсов.
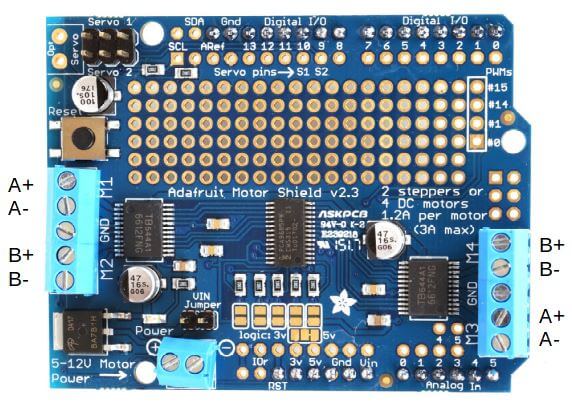
Motor Shield (2 канала, 2 А)
Хотите подключить мотор к своей Arduino или Iskra JS? Это не совсем тривиально: выводы микроконтроллера являются слаботочными, поэтому ток мотора, при подключении его напрямую, выведет их из строя. Эту проблему решает так называемый H-мост. Он позволяет управлять скоростью и направлением вращения мотора с помощью логических сигналов микроконтроллера.
На сегодняшний день, самым популярным H-мостом, является микросхема L298P. Motor Shield — плата расширения для Arduino на базе чипа L298P, позволяющая управлять моторами с напряжением 5–24 В в режиме раздельного питания и 7–12 В в режиме объединённого питания.
Плата имеет 2 независимых канала. Используя их, можно подключить на выбор:
- Пару DC-моторов
- Один двухфазный шаговый мотор.
- Один DC-мотор с током до 4 А, если объединить каналы
Выходы под каждый из двигателей выполнены в виде клеммника с винтом, поэтому пайка не требуется.
При разгоне и торможении двигатели сами индуцируют кратковременный обратный ток большой величины,
который может выжечь контакты микроконтроллера. На Motor Shield установлены возвратные диоды,
которые это предотвращают.
На Motor Shield установлены возвратные диоды,
которые это предотвращают.
На Motor Shield установлен комплект сквозных колодок Arduino Rev3, что означает возможность свободной установки других плат расширения, использующих незанятые пины. Однако, вы не сможете набрать этажерку из нескольких Motor Shield’ов для независимого управления большим числом двигателей: все платы будут работать параллельно, т.к. используют одни и те же пины. Но вы можете откусить или отогнуть управляющие ножки и перекинуть их на незанятые пины, чтобы добиться независимой работы.
На плате предусмотрена возможность выбора источника питания: от платы Arduino или от внешнего источника, подключаемого к клеммам «+» и «−». По умолчанию выбран раздельный режим, но переставив джампер, вы связываете контуры питания Arduino и Motor Shield и вам достаточно питать только одну из плат.
На плате расположены светодиоды-индикаторы, показывающие направление и скорость по каждому из каналов и подачу питания.
Обратите внимание
Так как USB-разъём компьютера может обеспечить током не более 500 мА, рекомендуется использовать
внешний источник питания, либо моторы, потребление которых не превышает данный порог.
При больших нагрузках микросхема-драйвер может сильно нагреться. Не прикасайтесь к ней, это может привести к ожогу.
Для управления шасси с 4 моторами не нужно иметь два Motor Shield’а: вы можете подключить левую пару к одному каналу, а правую — ко второму. Ведь моторы на одной стороне должны работать синхронно.
Внимание! При установке платы над Arduino Uno, или другой платой, обладающей высоким разъёмом USB/RJ45, наклейте на разъём пару слоёв изоленты, чтобы избежать замыкания дорожек на нижней стороне платы.
Распиновка
Для коммуникации с микроконтроллером используются цифровые контакты Arduino:
- 4 — направление, правый
- 5 — скорость (ШИМ), правый
- 6 — скорость (ШИМ), левый
- 7 — направление, левый
Эти контакты подключены через джамперы. Если вам необходимо использовать несколько Motor Shiled, вы можете снять джамперы и использовать для управления моторами свободные пины Arduino.
Фоторобот
Установка для съемки панорам на базе контроллера Freeduino, часть 2: контроллер и программирование в среде Arduino.exe
Freeduino
В этой части статьи будет описано использование контроллера Freeduino для управления панорамной съемкой с помощью установки, описанной в первой части. Так как это первая из статей, в которой затрагивается вопрос взаимодействия Freeduino и Windows, этому вопросу (установка драйверов, ПО для программирования) также будет уделено внимание.
В установке используется модель Freeduino Through-Hole (аналог Arduino Diecimila) с микроконтроллером ATmega328. Память программ — 32 К (2 К заняты загрузчиком), ОЗУ — 2 Кбайт, EEPROM — 1 Кбайт, тактовая частота — 16 МГц. Подробное описание устройства можно найти на сайте проекта Freeduino. Для практических нужд достаточно знать следующее:
- устройство имеет 14 контактов цифрового ввода/вывода (выводы работают с сигналами уровня 0/5 В, ток до 20 мА), 6 из них (№№3, 5, 6, 9, 10, 11) могут работать в режиме широтно-импульсной модуляции (ШИМ)
- выводы 1 и 2 совмещены с цепями обмена по USB и при подключении к компьютеру использоваться не могут
- устройство имеет 6 аналоговых входов АЦП, дискретность — 1024 уровня
- есть интерфейс USB
- питание осуществляется от USB либо от внешнего источника (оптимальное напряжение 7—12 В, имеется встроенный стабилизатор), переключение питания — перемычкой на плате
- встроенный предохранитель защищает компьютер при перегрузке при токе более 500 мА
- сброс микроконтроллера — аппаратный по USB от компьютера или кнопкой на плате
Freeduino Through-Hole. Верхний ряд разъемов — цифровые входы/выходы, нижний — аналоговые входы, питание и «сброс»
Верхний ряд разъемов — цифровые входы/выходы, нижний — аналоговые входы, питание и «сброс»
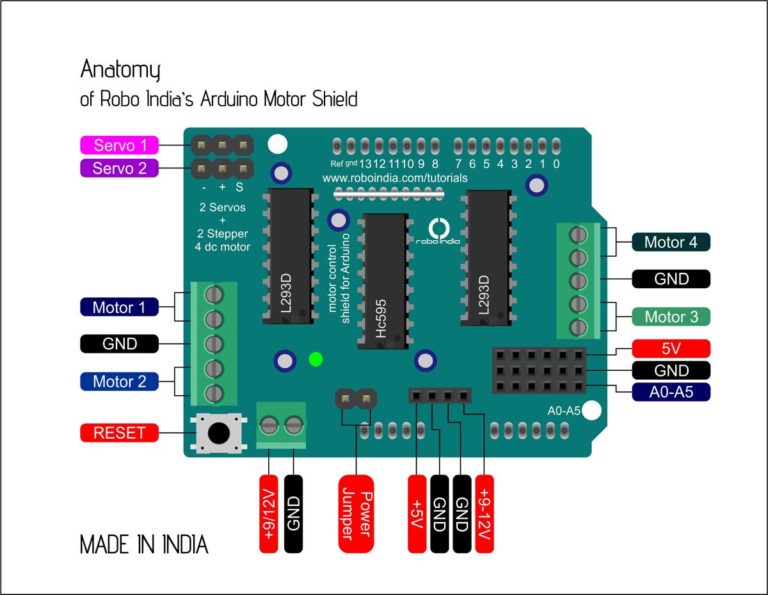
Для управления шаговым двигателем в установке используется плата расширения Motor Shield v3 на двух микросхемах L293D. С ее помощью можно независимо управлять двигателями постоянного тока (до 4), двигателями шаговыми (до 2), сервоприводами (до 2). Поддерживается ШИМ-режим. Сервоприводы управляются по отдельным каналам, двигатели постоянного тока и шаговые — по общим, поэтому одновременно можно подключать 2 шаговых двигателя, либо 1 шаговый и 2 двигателя постоянного тока, либо 4 двигателя постоянного тока.
Что нужно знать о Motor Shield v3:
- напряжение питания 5 В (слаботочная цепь и сервоприводы, питание поступает от стабилизированной цепи основного модуля Freeduino), 7—24 В (силовая цепь двигателей, питание от внешнего источника либо от внешней цепи питания основного модуля Freeduino; переключатель — перемычка на плате)
- максимально-продолжительный ток каждого канала 0,6 А
- для управления платой расширения используется библиотека Adafruit Motor shield library (AFMotor), которую следует распаковать в папку hardwarelibraries с ПО Arduino
Плата расширения Motor Shield v3. В верхнем левом углу разъем подключения сервоприводов. Слева и справа разъемы синего цвета для двигателей постоянного тока. Нижний разъем синего цвета — внешнее питание. Разъемы черного цвета для штыревого монтажа обеспечивают доступ к соответствующим выводам основного модуля Freeduino
В верхнем левом углу разъем подключения сервоприводов. Слева и справа разъемы синего цвета для двигателей постоянного тока. Нижний разъем синего цвета — внешнее питание. Разъемы черного цвета для штыревого монтажа обеспечивают доступ к соответствующим выводам основного модуля Freeduino
Плата Motor Shield v3 устанавливается непосредственно в плату Freeduino Through-Hole
Плата Motor Shield v3 устанавливается непосредственно в плату Freeduino Through-Hole, при этом доступ к портам Freeduino обеспечивается через сквозные разъемы Motor Shield v3. Так как обмен данными осуществляется по общим цифровым каналам, не все из них можно использовать для задач, не связанных с управлением двигателями. Подробнее информацию о свободных портах можно найти на сайте ladyada.net в разделе вопросов и ответов по Motor Shield. Кратко же, свободными портами при подключении и объявлении в управляющей программе подключения двигателей к портам M1-M4 (синие клеммы), остаются все аналоговые входы, порты для сервомашинок 9 и 10, порт 2 и 13 (с ограничениями, связанными с подключением по USB и работой встроенного в плату индикатора загрузки контроллера на 13-м порте). Для управления камерой (дистанционное управление по USB) в описываемой в статье установке используется порт 9. В установке питание Motor Shield v3 осуществляется от цепи питания модуля Freeduino Through-Hole, к которой подключается внешний блок питания 7—8 В (6 аккумуляторов типа АА). Напряжение на клеммах двигателя в процессе работы 6—7 В, при сопротивлении обмоток в 10 Ом продолжительный ток лишь немного превышает допустимый 0,6 А.
Для управления камерой (дистанционное управление по USB) в описываемой в статье установке используется порт 9. В установке питание Motor Shield v3 осуществляется от цепи питания модуля Freeduino Through-Hole, к которой подключается внешний блок питания 7—8 В (6 аккумуляторов типа АА). Напряжение на клеммах двигателя в процессе работы 6—7 В, при сопротивлении обмоток в 10 Ом продолжительный ток лишь немного превышает допустимый 0,6 А.
Freeduino и Windows
Подключение Freeduino к компьютерам с ОС Windows (XP и 7) — простой процесс, требующий лишь выполнения последовательности действий, описанных в инструкции к устройству Freeduino. В комплект платы Freeduino Through-Hole входит диск с ПО и инструкциями (его также можно скачать с сайтов Arduino, Freeduino и прочих совместимых проектов). Имеющийся на диске архив arduino-0017.zip нужно распаковать в папку arduino-0017 в корень системного диска (C:). На плате Freeduino Through-Hole перемычкой устанавливаем питание по USB и после этого подключаем Freeduino Through-Hole к компьютеру. Система обнаружит новое устройство и предложит выбрать для него драйвер, указываем путь к нему: C:arduino-0017driversFTDI USB Drivers. После этого через Диспетчер устройств Windows нужно определить, какой из COM-портов приписан Freeduino, подключенному по USB:
Система обнаружит новое устройство и предложит выбрать для него драйвер, указываем путь к нему: C:arduino-0017driversFTDI USB Drivers. После этого через Диспетчер устройств Windows нужно определить, какой из COM-портов приписан Freeduino, подключенному по USB:
Можно приступать к программированию. В папке arduino-0017 (или более поздних версий) имеется программа Arduino.exe — интегрированная среда разработки и загрузки, написанная на Java. В нее входят редактор кода, компилятор, модуль передачи программы в плату Freeduino/Arduino, справочная система и набор программ-примеров. В программе после подключения устройства Freeduino/Arduino нужно выбрать его тип и COM-порт подключения:
Для желающих программировать «визуально», а не в текстовом формате, есть программа Scratch for Arduino S4A.
Scratch for Arduino (S4A), программа для визуального программирования Arduino-совместимых платформ и обучения программированию
Программа управления панорамной съемкой, Arduino.
 exe
exeПрограмма для управления панорамной съемкой должна выполнить следующие действия:
- подать сигнал 5 В на USB-порт камеры для съемки (устойчиво срабатывает, если сигнал подается в течение 1-2 секунд),
- выдержать паузу (3 секунды), необходимую на съемку,
- подать сигнал на шаговый двигатель — повернуть камеру на заданный угол,
- остановиться и подождать, пока конструкция стабилизируется (3 секунды),
- повторить цикл нужное число раз.
Цикл должен повторяться до тех пор, пока не будет обеспечен требуемый угол охвата пространства (я выбрал полуоборот). Кроме того, перед выполнением циклов съемки-поворота нужно выставить камеру в нужном направлении съемки, для этого шаговый двигатель должен свободно вращаться — с него нужно снять напряжение на время прицеливания.
Камера Canon PowerShot G9 оснащена зум-объективом с эквивалентным фокусным расстоянием 35—210 мм. На весь диапазон приходится 12 шагов привода зума, для панорамной съемки стоит использовать первые 5-6 шагов. С помощью поворотной головки со шкалой панорамирования было определено, что угол поворота камеры при панорамировании с минимальным фокусным расстоянием — ≈45°. При фокусном расстоянии, соответствующем шестому шагу зума, этот угол — ≈25° Если выбрать угол поворота для каждого цикла панорамирования 22°, можно снимать панораму и для шестой позиции зума, и для нулевой, выбросив в последнем случае из серии каждый второй кадр. Для промежуточных положений зума панорамная серия просто будет избыточной, что лишь увеличит время на обработку. Чтобы снять панораму с охватом в полуоборот при единичном повороте на 22°, понадобится 9 циклов «съемка-поворот».
С помощью поворотной головки со шкалой панорамирования было определено, что угол поворота камеры при панорамировании с минимальным фокусным расстоянием — ≈45°. При фокусном расстоянии, соответствующем шестому шагу зума, этот угол — ≈25° Если выбрать угол поворота для каждого цикла панорамирования 22°, можно снимать панораму и для шестой позиции зума, и для нулевой, выбросив в последнем случае из серии каждый второй кадр. Для промежуточных положений зума панорамная серия просто будет избыточной, что лишь увеличит время на обработку. Чтобы снять панораму с охватом в полуоборот при единичном повороте на 22°, понадобится 9 циклов «съемка-поворот».
Для управления шаговым двигателем (имя объекта motor) используются инструкции и функции из библиотеки AFMotor.h:
- AF_Stepper motor(«число шагов на полный оборот», «порт управления»),
- motor.setSpeed(«скорость в оборотах в минуту»),
- motor.release(),
- motor.step(«угол поворота», «направление», «режим вращения»).
Первая описывает шаговый двигатель. В нашем случае двигателя с 200 шагами на оборот, подключенного к первому и второму портам Motor Shield, инициализация выглядит так:
AF_Stepper motor(200, 1)
Вторая задает скорость вращения — на практике все нормально работает при скорости 4 оборота в минуту:
motor.setSpeed(4)
Третья инструкция «освобождает» двигатель, чтобы его можно было вращать:
motor.release()
Отмечу, что так как редуктор в установке не используется, в процессе съемки для фиксации неподвижной камеры питание с обмоток двигателя не снимается — команда motor.release() не подается внутри цикла, только лишь на этапе прицеливания. Чтобы установка не раскачивалась шаговым двигатель, выбран режим поворота Interleave — двойной точности и половинной скорости, при этом аргумент «угол поворота», задаваемый в шагах двигателя, нужно удвоить. Четвертая инструкция:
motor.step(angle*2, FORWARD, INTERLEAVE)
Язык программирования, применяемый в среде Arduino.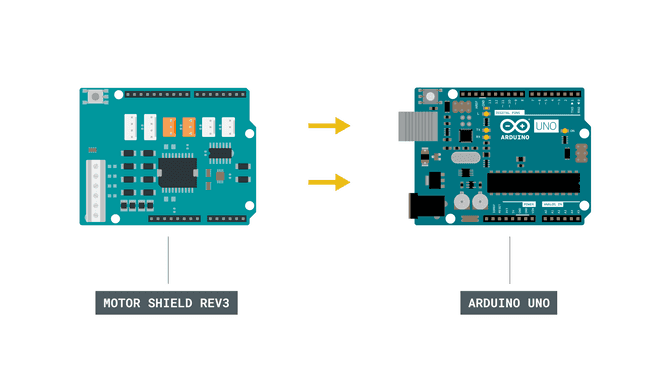 exe, близок к C++. Программа имеет две обязательные функции: void setup() и void loop(). В первой выполняется инициализация, объявление переменных и объектов. Вторая — цикл выполнения инструкций, повторяющийся раз за разом, пока контроллер не будет отключен от цепи питания. Чтобы программа съемки панорамы не выполнялась более одного раза, цикл съемки нужно поместить не в void loop(), а в void setup(). Время в программе задается в миллисекундах. Код программы («скетч» в среде Arduino.exe) выглядит так:
exe, близок к C++. Программа имеет две обязательные функции: void setup() и void loop(). В первой выполняется инициализация, объявление переменных и объектов. Вторая — цикл выполнения инструкций, повторяющийся раз за разом, пока контроллер не будет отключен от цепи питания. Чтобы программа съемки панорамы не выполнялась более одного раза, цикл съемки нужно поместить не в void loop(), а в void setup(). Время в программе задается в миллисекундах. Код программы («скетч» в среде Arduino.exe) выглядит так:
Окно программы после компиляции. Код программы в виде текстового файла — pano_usb_shot_m.txt
Программа загружается в контроллер Freeduino и хранится там, даже если питание отключить. Чтобы запустить программу из памяти контроллера, нужно просто включить питание на блоке питания или нажать кнопку Reset.
Видеоролик о работе установки, файл 1 МБ, MP4.
11 июля 2011 Г.
Сергей Щербаков
Новости
GoPro Hero 11 Black Mini подешевела сразу на 100 долларов в Китае
3 апреля 2023
61 Мп и запись видео 6К.
 Раскрыты характеристики полнокадровых беззеркальных камер Nikon Z8x и Nikon Z8
Раскрыты характеристики полнокадровых беззеркальных камер Nikon Z8x и Nikon Z82 апреля 2023
Представлена Sony ZV-E1 — самая компактная полнокадровая беззеркальная камера производителя
29 марта 2023
Раздел новостей >
Pololu — Шилды для Arduino
Сравните все товары в этой категории
Подкатегории
Товары в категории «Шилды для Arduino»
Заставьте Arduino двигаться! Этот экран упрощает управление двумя мощными двигателями постоянного тока с помощью платы Arduino или платы, совместимой с Arduino. Его двойные надежные драйверы двигателей VNH5019 работают от 5,5 до 24 В и могут обеспечивать постоянную подачу 12 А (30 А в пиковом режиме) на двигатель или 24 А (60 А в пиковом режиме) на один двигатель, подключенный к обоим каналам. Эти великолепные драйверы также обеспечивают обратную связь по току и принимают ультразвуковые частоты ШИМ для более тихой работы.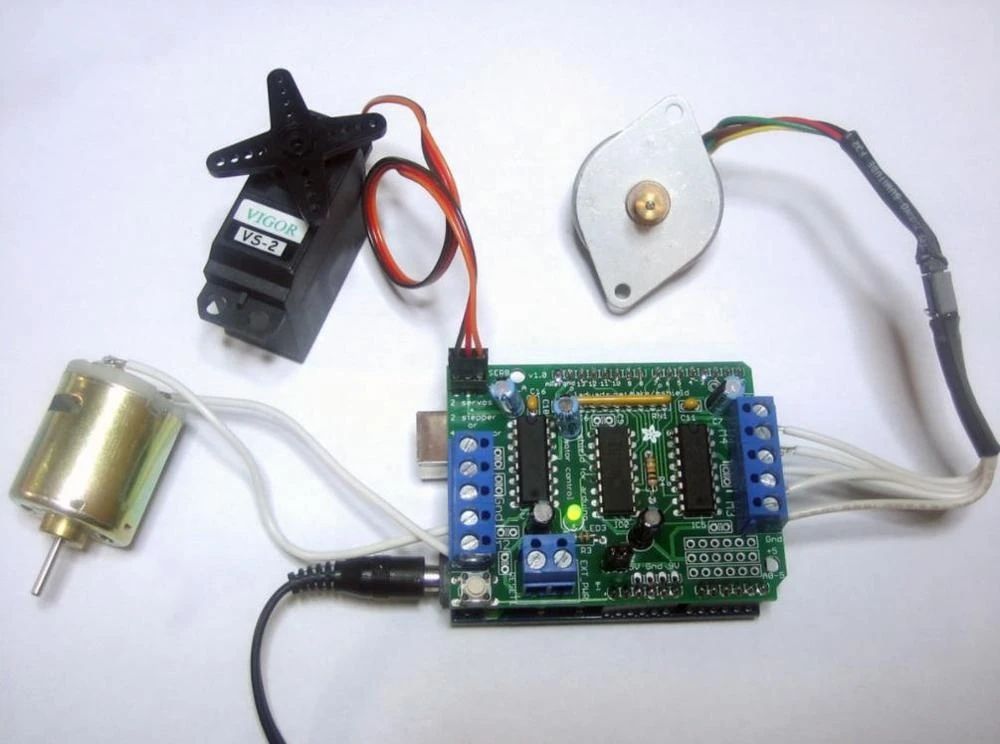 Все сопоставления контактов Arduino можно настроить, если значения по умолчанию неудобны, а линии управления драйвером двигателя выведены вдоль левой стороны экрана для общего использования без Arduino.
Все сопоставления контактов Arduino можно настроить, если значения по умолчанию неудобны, а линии управления драйвером двигателя выведены вдоль левой стороны экрана для общего использования без Arduino.
Этот экран позволяет легко управлять двумя щеточными двигателями постоянного тока с помощью платы Arduino или платы, совместимой с Arduino. Его двойные драйверы двигателей TB9051FTG работают от 4,5 до 28 В и могут обеспечить постоянную подачу 2,6 А на двигатель (5 А в пиковом режиме). Эти великолепные драйверы также обеспечивают обратную связь по току и принимают ультразвуковые частоты ШИМ для более тихой работы. Фиксированный порог прерывания тока позволяет каждому TB9051 ограничивать пиковый ток двигателя, и они имеют встроенную защиту от пониженного напряжения, перегрузки по току и перегрева; наш щит также добавляет защиту от обратного напряжения. Все сопоставления контактов Arduino можно настроить, если значения по умолчанию неудобны, а линии управления драйвером двигателя выведены вдоль левой стороны экрана для общего использования без Arduino.
Этот экран позволяет легко управлять двумя щеточными двигателями постоянного тока с помощью платы Arduino или платы, совместимой с Arduino. Его двойные драйверы двигателей MC33926 работают от 5 до 28 В и могут обеспечить постоянную подачу 3 А на двигатель. Эти великолепные драйверы также обеспечивают обратную связь по току и принимают ультразвуковые частоты ШИМ для более тихой работы. Все сопоставления контактов Arduino можно настроить, если значения по умолчанию неудобны, а линии управления драйвером двигателя выведены вдоль левой стороны экрана для общего использования без Arduino.
Этот небольшой экран представляет собой простой и экономичный способ управления двумя небольшими коллекторными двигателями постоянного тока с помощью платы Arduino или платы, совместимой с Arduino. Два встроенных драйвера двигателя MAX14870 позволяют ему работать от 4,5 В до 36 В, что делает его идеальным для двигателей и приложений с более высоким напряжением, а экран может выдерживать 1,7 А в непрерывном режиме (2,5 А в пиковом режиме) на двигатель. Экран можно дополнительно настроить для питания Arduino от того же источника питания, что и драйвер двигателя, а сопоставление контактов Arduino можно настроить (путем обрезки дорожек), если значения по умолчанию неудобны.
Экран можно дополнительно настроить для питания Arduino от того же источника питания, что и драйвер двигателя, а сопоставление контактов Arduino можно настроить (путем обрезки дорожек), если значения по умолчанию неудобны.
Этот небольшой экран представляет собой простой и экономичный способ управления двумя небольшими коллекторными двигателями постоянного тока с помощью платы Arduino или платы, совместимой с Arduino. Его встроенный драйвер двойного двигателя DRV8835 позволяет ему работать от 1,5 В до 11 В, что делает его отличным вариантом управления для низковольтных двигателей. Экран может подавать непрерывный ток 1,2 А (пиковое значение 1,5 А) на двигатель или непрерывный ток 2,4 А (пиковое значение 3 А) на один двигатель, если оба канала подключены параллельно.
Этот небольшой экран представляет собой простой и экономичный способ управления двумя небольшими коллекторными двигателями постоянного тока с помощью платы Arduino или платы, совместимой с Arduino. Его интегрированный A4990 Dual Motor Driver работает от 6 В до 32 В и может непрерывно подавать 0,65 А на каждый канал двигателя, что делает его отличным вариантом управления слаботочными двигателями, работающими от высокого напряжения. A4990 настроен на ограничение пикового тока двигателя примерно до 0,9 А на канал и защищен от обратного напряжения, пониженного напряжения, повышенного напряжения, короткого замыкания и перегрева.
A4990 настроен на ограничение пикового тока двигателя примерно до 0,9 А на канал и защищен от обратного напряжения, пониженного напряжения, повышенного напряжения, короткого замыкания и перегрева.
Этот щит упрощает сборку робота Zumo, управляемого Arduino. Щит крепится к собранному шасси Zumo, подключаясь непосредственно к клеммам батареи и двигателям шасси, а Arduino подключается к щитку лицевой стороной вниз. Этот щит включает в себя два драйвера двигателя, зуммер для воспроизведения простых звуков и музыки, пользовательскую кнопку и 3-осевой акселерометр, компас и гироскоп. Экран повышает напряжение батареи для питания Arduino, а также размыкает линии ввода-вывода Arduino, кнопку сброса и пользовательский светодиод для удобного доступа и размещения дополнительных датчиков для таких вещей, как обнаружение препятствий и краев.
Этот щит упрощает сборку робота Zumo, управляемого Arduino. Щит крепится к собранному шасси Zumo, подключаясь непосредственно к клеммам батареи и двигателям шасси, а Arduino подключается к щитку лицевой стороной вниз. Этот щит включает в себя два драйвера двигателя, зуммер для воспроизведения простых звуков и музыки, пользовательскую кнопку и 3-осевой акселерометр, компас и гироскоп. Экран повышает напряжение батареи для питания Arduino, а также размыкает линии ввода-вывода Arduino, кнопку сброса и пользовательский светодиод для удобного доступа и размещения дополнительных датчиков для таких вещей, как обнаружение препятствий и краев.
Этот щит включает в себя два драйвера двигателя, зуммер для воспроизведения простых звуков и музыки, пользовательскую кнопку и 3-осевой акселерометр, компас и гироскоп. Экран повышает напряжение батареи для питания Arduino, а также размыкает линии ввода-вывода Arduino, кнопку сброса и пользовательский светодиод для удобного доступа и размещения дополнительных датчиков для таких вещей, как обнаружение препятствий и краев.
Этот набор содержит большинство деталей, необходимых для сборки робота Zumo, управляемого Arduino. Он состоит из Zumo Shield для Arduino, комплекта шасси Zumo и лезвия Zumo. Вам также понадобится пара микрометаллических мотор-редукторов, четыре батарейки типа АА и A-Star 32U4 Prime или Arduino, чтобы собрать робота Zumo (двигатели, батареи и Arduino продаются отдельно). Этот продукт представляет собой комплект ; требуется сборка (включая пайку).
Робот Zumo для Arduino — это управляемая Arduino платформа гусеничного робота размером менее 10 см × 10 см — достаточно маленькая, чтобы претендовать на мини-сумо. Он включает в себя два микрометаллических мотор-редуктора, соединенных с парой силиконовых гусениц, бульдозерный отвал из нержавеющей стали, массив из шести инфракрасных датчиков отражения для отслеживания линии или обнаружения края, зуммер для простых звуков и музыки и 3-осевой акселерометр. , магнитометр и гироскоп для обнаружения ударов и отслеживания ориентации. Просто добавьте 4 батарейки АА и Arduino (или совместимый контроллер), и вы готовы к работе! Не требуется пайка или сборка.
Он включает в себя два микрометаллических мотор-редуктора, соединенных с парой силиконовых гусениц, бульдозерный отвал из нержавеющей стали, массив из шести инфракрасных датчиков отражения для отслеживания линии или обнаружения края, зуммер для простых звуков и музыки и 3-осевой акселерометр. , магнитометр и гироскоп для обнаружения ударов и отслеживания ориентации. Просто добавьте 4 батарейки АА и Arduino (или совместимый контроллер), и вы готовы к работе! Не требуется пайка или сборка.
Дайте волю своему Arduino! Этот шилд позволяет подключать беспроводные модули Wixel к Arduino (и другим совместимым продуктам), обеспечивая простое беспроводное программирование, отладку и управление с помощью стандартного программного обеспечения Arduino. Разработчики Wixel также могут использовать этот элемент в качестве макетной платы Wixel.
Эти штабелируемые гнездовые разъемы 0,1 дюйма (2,54 мм) имеют оптимальную высоту для подключения плат Arduino к платам Arduino и другим платам. заголовка, так что в нем есть все необходимое как для щитов старого, так и для нового образца.0003
заголовка, так что в нем есть все необходимое как для щитов старого, так и для нового образца.0003
Arduino Motor Shield Rev3 — RobotShop
Сэкономьте $0.00
№ производителя:
А000079
- Рабочее напряжение: от 5 до 12 В
- Максимальный ток: 2 А на канал или 4 А макс (с внешним источником питания)
- Двойной мостовой драйвер, предназначенный для управления индуктивными нагрузками
- Shield совместим с TinkerKit
ZIP-файл
- Документация
- Рабочее напряжение: от 5 до 12 В
- Контроллер двигателя: L298P, Приводы 2 двигателя постоянного тока или 1 шаговый двигатель
- Максимальный ток: 2 А на канал или 4 А макс (с внешним источником питания)
- Измерение тока: 1,65 В/А
- Останов свободного хода и функция торможения
Ваша платежная информация защищена.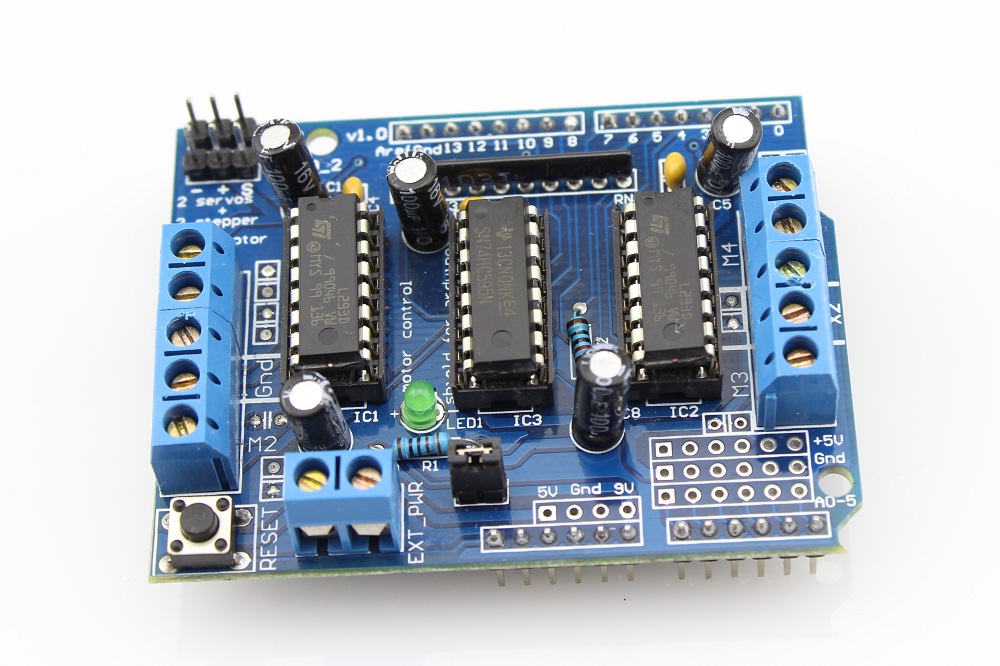 Мы не храним данные кредитной карты и не имеем доступа к информации о вашей кредитной карте.
Мы не храним данные кредитной карты и не имеем доступа к информации о вашей кредитной карте.
Страна
СШААвстралияНорвегияФранция—АфганистанАландские островаАлбанияАлжирАндорраАнголаАнгильяАнтигуа и БарбудаАргентинаАрменияАрубаАвстралияАвстрияАзербайджанБагамыБахрейнБангладешБарбадосБеларусьБельгияБелизБенинБермудыБутанБоли через Боснию и ГерцеговинуБотсванаБразилияБританская территория в Индийском океанеБританские Виргинские островаБрунейБолгарияБуркина-ФасоБурундиКамерунКабо-ВердеКарибы НидерландыКаймановы островаЦентральноафриканская РеспубликаЧадЧилиКитайОстров РождестваКокосовые острова (Килинг)КолумбияКоморские островаКонго-БраззавильКонго-КиншасаОстрова КукаКоста-РикаХорватияCuraç aoКипрЧехияКот-д’ИвуарДанияДжибутиДоминикаДоминиканская РеспубликаЭквадорЕгипетСальвадорЭкваториальная ГвинеяЭритреяЭстонияЭсватиниЭфиопияФолклендские островаФарерские островаФиджиФинляндияФранцияФранцузская ГвианаФранцузская ПолинезияФранцузские Южные ТерриторииГабонГамбияГрузияГерманияГанаГибралтарГрецияГренландия ГренадаГваделупаГватемалаГернсиГвинеяГвинея -БисауГайанаГаитиГондурасГонконг САРВенгрияИсландияИндияИндонезияИракИрландияОстров МэнИзраильИталияЯмайкаЯпонияДжерсиИорданияКазахстанКенияКирибатиКосовоКувейтКыргызстанЛаосЛатвияЛиванЛесотоЛиберияЛихтенштейнЛитваЛюксембургМакао ЮАРМадагаскарМалави МалайзияМальдивыМалиМальтаМартиникаМавританияМаврикийМайоттаМексикаМолдоваМонакоМонголияЧерногорияМонтсерратМароккоМозамбикМьянма (Бирма)НамибияНауруНепалНидерландыНовая КаледонияНовая ЗеландияНикарагуаНигерНигерияНиуэ Остров НорфолкСеверная МакедонияНорвегияОманПакистанПалестинские территорииПанамаПап ua Новая ГвинеяПарагвайПеруФилиппиныПиткэрнПольшаПортугалияКатарРеюньонРумынияРоссияРуандаСамоаСан-МариноСан-Томе и ПринсипиСаудовская АравияСенегалСербияСейшельские островаСьерра-ЛеонеСингапурСинт-МартенСловакияСловенияСоломоновы островаСомалиЮжная АфрикаЮжная Джорджия и Южные Сандвичевы островаЮжная КореяИспанияШри-Ланка св.