Как устроен асинхронный двигатель. Как создается вращающееся магнитное поле в статоре. Как возникает вращающий момент в роторе. Какие преимущества и недостатки у асинхронных двигателей. Где применяются асинхронные электродвигатели.
Устройство асинхронного двигателя
Асинхронный двигатель состоит из двух основных частей:
- Статор — неподвижная часть двигателя
- Ротор — вращающаяся часть
Статор представляет собой полый цилиндр, изготовленный из листов электротехнической стали. На внутренней поверхности статора расположены пазы, в которые укладывается обмотка. Обмотка статора обычно трехфазная и подключается к сети переменного тока.
Ротор размещается внутри статора на подшипниках. Существует два основных типа роторов асинхронных двигателей:
- Короткозамкнутый ротор — представляет собой цилиндр из листов электротехнической стали с пазами, в которые залита алюминиевая обмотка в виде «беличьей клетки»
- Фазный ротор — имеет трехфазную обмотку, концы которой выведены на контактные кольца
Создание вращающегося магнитного поля
Принцип работы асинхронного двигателя основан на создании вращающегося магнитного поля в статоре. Как же это происходит?

При подключении трехфазной обмотки статора к сети переменного тока в каждой фазе протекает синусоидальный ток, сдвинутый относительно других фаз на 120°. Эти токи создают пульсирующие магнитные поля, которые, складываясь, образуют вращающееся магнитное поле.
Скорость вращения магнитного поля статора зависит от частоты питающего напряжения и числа пар полюсов обмотки:
n = 60f / p
где n — скорость вращения поля (об/мин), f — частота тока (Гц), p — число пар полюсов.
Принцип возникновения вращающего момента
Вращающееся магнитное поле статора пересекает проводники обмотки ротора и наводит в них ЭДС. Под действием ЭДС в замкнутой обмотке ротора начинают протекать индукционные токи. Взаимодействие этих токов с магнитным полем статора создает электромагнитный момент, под действием которого ротор начинает вращаться вслед за полем статора.
Однако ротор никогда не может догнать магнитное поле статора и вращается несинхронно, т.е. асинхронно. Отсюда и название — асинхронный двигатель.
Разница между скоростью вращения магнитного поля статора и ротора называется скольжением:

s = (n1 — n2) / n1 * 100%
где n1 — скорость поля статора, n2 — скорость ротора.
Преимущества и недостатки асинхронных двигателей
Асинхронные двигатели имеют ряд важных преимуществ:
- Простота конструкции и высокая надежность
- Низкая стоимость
- Возможность работы напрямую от сети переменного тока
- Высокие пусковые моменты
- Возможность кратковременной работы с перегрузкой
К недостаткам можно отнести:
- Сложность регулирования скорости
- Относительно низкий cosφ
- Большой пусковой ток
Области применения асинхронных двигателей
Благодаря своим достоинствам, асинхронные двигатели нашли широчайшее применение в различных отраслях:
- Промышленные приводы станков, насосов, вентиляторов
- Транспорт (трамваи, троллейбусы, электровозы)
- Бытовая техника (стиральные машины, холодильники)
- Сельское хозяйство
- Строительство
По некоторым оценкам, более 80% всех электродвигателей в мире — это именно асинхронные машины.
Регулирование скорости асинхронных двигателей
Хотя регулирование скорости асинхронных двигателей связано с определенными трудностями, существует несколько способов его осуществления:
- Изменение числа пар полюсов. Позволяет ступенчато менять скорость.
- Частотное регулирование. Наиболее современный и эффективный способ плавного изменения скорости.
- Реостатное регулирование. Применяется для двигателей с фазным ротором.
- Изменение напряжения питания. Ограниченный диапазон регулирования.
Развитие силовой электроники и появление доступных частотных преобразователей сделало асинхронные двигатели еще более универсальными.
Особенности пуска асинхронных двигателей
При прямом пуске от сети асинхронные двигатели потребляют большой пусковой ток, в 5-7 раз превышающий номинальный. Это может вызвать проблемы в электросети. Для ограничения пускового тока применяются следующие способы пуска:
- Прямой пуск. Простой, но создает большие нагрузки на сеть.
- Пуск переключением со звезды на треугольник. Снижает пусковой ток в 3 раза.
- Плавный пуск с помощью устройства плавного пуска. Обеспечивает плавное нарастание напряжения.
- Частотный пуск. Наиболее совершенный способ, обеспечивающий плавный разгон.
Выбор способа пуска зависит от мощности двигателя и условий эксплуатации.

Энергоэффективность асинхронных двигателей
В последние годы большое внимание уделяется повышению энергоэффективности асинхронных двигателей. Разработаны и внедряются двигатели классов IE2, IE3 и IE4 с повышенным КПД. Основные пути повышения эффективности:
- Применение высококачественных электротехнических сталей
- Оптимизация геометрии активной части
- Снижение потерь в обмотках
- Улучшение охлаждения
Применение энергоэффективных двигателей позволяет существенно снизить расход электроэнергии в промышленности и других отраслях.
Заключение
Асинхронные двигатели благодаря простоте, надежности и низкой стоимости остаются основным типом электропривода в промышленности и быту. Развитие технологий управления, появление энергоэффективных конструкций открывает новые перспективы их применения.
Принцип работы асинхронного электродвигателя | Русэлт
Асинхронные электродвигатели – это устройства, главным назначением которых является преобразование энергии переменного электротока в механическую. Своим названием двигатель обязан асинхронному типу вращения ротора относительно частоты вращения магнитного поля, индуцирующего электроток в обмотке статора.
Принцип работы на примере асинхронного электродвигателя трехфазного тока
Этот тип электрического двигателя наиболее часто применяется в различных сферах промышленности. Двигатель имеет 3-и обмотки на статоре, со смещением на 120 градусов. Обмотки запитаны переменным током и объединены по схеме «звезда» или «треугольник». При подаче напряжения на обмотку статора во всех трёх фазах появится магнитный поток.
Вместе с изменением частоты напряжения на обмотке статора, изменяется и магнитный поток. Фазы и магнитные потоки смещены относительно друг друга на сто двадцать градусов. Суммарный магнитный поток и будет вращающимся магнитным потоком, создающим электродвижущую силу (ЭДС).
Преимущества и недостатки асинхронных электродвигателей
Простота эксплуатации и хорошая ремонтопригодность – главные достоинства асинхронного двигателя, сделавшие его наиболее востребованным в очень разных сферах машиностроения и приборостроения. Привлекает и:
- Сравнительно невысокая цена;
- Надёжность
- Несложность подсоединения в общую электроцепь устройств.
Асинхронные электродвигатели имеют и ряд недостатков:
- Трудности с точным регулированием скорости;
- Большой пусковой ток;
- Относительно невысокий коэффициент мощности.
По типу обмотки ротора, короткозамкнутой или фазной, асинхронные двигатели, подразделяются на 2 типа:
- Электродвигатели с короткозамкнутым ротором имеют обмотку, замыкающуюся на сам ротор;
- Электродвигатели с фазным ротором – обмотку с концами, выведенными на щеточно-коллекторный узел.
Преимущество двигателя с фазным ротором в том, что скорость вращения можно регулировать путем подключения дополнительных сопротивлений (реостатного регулирования).
Устройство и принцип работы трехфазных асинхронных двигателей | RuAut
Устройство трехфазных асинхронных двигателей (статор и ротор асинхронных двигателей)Трехфазный асинхронный двигатель состоит из неподвижного статора и ротора. Три обмотки размещены в пазах на внутренней стороне сердечника статора асинхронного двигателя. Обмотка же ротора асинхронного двигателя не имеет электрического соединения с сетью и с обмоткой статора. Начало и концы фаз обмоток статора присоединяют к зажимам в коробке выводов по схеме звезда или треугольник.
Асинхронные двигатели в основном различаются устройством ротора, который бывает двух типов: фазный или короткозамкнутый. Обмотка короткозамкнутого ротора асинхронного двигателя выполняется на цилиндре из медных стержней и называется «беличьей клеткой». Торцевые концы стержней замыкают металлическими кольцами. Пакет ротора набирают из электротехнической стали. В двигателях меньшей мощности стержни заливают алюминием. Фазный ротор и статор имеют трехфазную обмотку. Фазы обмотки соединяют звездой или треугольником и ее свободные концы выводят на изолированные контактные кольца.
Торцевые концы стержней замыкают металлическими кольцами. Пакет ротора набирают из электротехнической стали. В двигателях меньшей мощности стержни заливают алюминием. Фазный ротор и статор имеют трехфазную обмотку. Фазы обмотки соединяют звездой или треугольником и ее свободные концы выводят на изолированные контактные кольца.
Обмотка статора асинхронного двигателя в виде трех катушек уложена в пазы расположенные под углом в 120 градусов. Начало и конца катушек обозначаются соответственно буквами A, B, C и X,Y,Z. При подаче на катушки трехфазного напряжения в них установятся токи Ia, Ib, Ic и катушки создадут собственное переменное магнитное поле. Ток в любой катушке положительный, когда он направлен от начала к ее концу и отрицательный при обратном направлении. Векторы намагничивающей силы совпадают с осями катушек, а их величина определяется значениями токов, направление результирующего вектора совпадает с осью катушки. Вектор результирующей намагничивающей силы поворачивается на 120 градусов сохраняя величину совпадает с осью соответствующей катушки.
Совокупность моментов созданных отдельными проводниками образует результирующий вращающий момент двигателя, возникает электромагнитная пара сил, которая стремится повернуть ротор в направлении движения электромагнитного поля статора. Ротор приходит во вращение приобретает определенную скорость, магнитное поле и ротор вращаются с разными скоростями или асинхронно. Применительно к асинхронным двигателям, скорость вращения ротора всегда меньше скорости вращения магнитного поля статора.
Пуск асинхронных двигателейВ асинхронных двигателях с большим моментом инерции необходимо увеличение вращающего момента с одновременным ограничением пусковых токов — для этих целей применяют двигатели с фазным ротором. Для увеличения начального пускового момента в схему ротора включают трехфазный реостат. В начале пуска он введен полностью, пусковой ток при этом уменьшается. При работе реостат полностью выведен. Для пуска асинхронных двигателей с короткозамкнутым ротором применяют три схемы: с реактивной катушкой, с автотрансформатором и с переключением со звезды на треугольник. Рубильник последовательно соединяет реактивную катушку и статор двигателя. Когда скорость ротора приблизится к номинальной, замыкается рубильник, он закорачивает катушка и статор переключаются на полное напряжение сети. При автотрансформаторном пуске по мере разгона двигателя, автотрансформатор переводится в рабочее положение, в котором на статор подается полное напряжение сети. Пуск асинхронного двигателя с предварительным включением обмотки статора звездой и последующим переключением ее на треугольник дает трехкратное уменьшение тока.
Для увеличения начального пускового момента в схему ротора включают трехфазный реостат. В начале пуска он введен полностью, пусковой ток при этом уменьшается. При работе реостат полностью выведен. Для пуска асинхронных двигателей с короткозамкнутым ротором применяют три схемы: с реактивной катушкой, с автотрансформатором и с переключением со звезды на треугольник. Рубильник последовательно соединяет реактивную катушку и статор двигателя. Когда скорость ротора приблизится к номинальной, замыкается рубильник, он закорачивает катушка и статор переключаются на полное напряжение сети. При автотрансформаторном пуске по мере разгона двигателя, автотрансформатор переводится в рабочее положение, в котором на статор подается полное напряжение сети. Пуск асинхронного двигателя с предварительным включением обмотки статора звездой и последующим переключением ее на треугольник дает трехкратное уменьшение тока.
Параллельные обмотки двух фаз образуют одну пару полюсов сдвинутые в пространстве на 120 градусов. Последовательное соединение обмоток образует две пары полюсов, что дает возможность уменьшить скорость вращения в два раза. Для регулирования скорости вращения ротора изменением частоты тока используют отдельный источник тока или преобразователь энергии с регулируемой частотой выполненный на тиристорах.
Последовательное соединение обмоток образует две пары полюсов, что дает возможность уменьшить скорость вращения в два раза. Для регулирования скорости вращения ротора изменением частоты тока используют отдельный источник тока или преобразователь энергии с регулируемой частотой выполненный на тиристорах.
При торможении противовключением меняются два провода соединяющих трехфазную сеть с обмотками статора, изменяя при этом направление движения магнитного поля машины. При этом наступает режим электромагнитного тормоза. Для динамического торможения обмотка статора отключается от трехфазной сети и включается в сеть постоянного тока. Неподвижное поле статора заставляет ротор быстро останавливаться. Асинхронные двигатели нашли широкое применение в промышленности. В строительных механизмах, на металлообрабатывающих станках, в кузнечно-прессовом оборудовании, в силовых приводах прокатных станов, в радиолокационных станциях и многих других отраслях.
|
Понять принцип действия асинхронного двигателя не сложно, если не пользоваться учебниками для вузов и школ. Зачастую академическая литература лишь препятствует пытливому уму разобраться в работе электромоторов и часто навсегда отбивает охоту заниматься изысканиями, связанными с электротехникой и электромеханикой. В последнее время у многих людей, не связанных напрямую с наладкой и проектированием машин, появился интерес к сборке самодельных станков, механизмов, летательных аппаратов и самодвижущихся машин. Поэтому в этой статье мы попытались доступно объяснить принцип действия асинхронного электродвигателя без сложных понятий и формул. Работа любого асинхронного двигателя построена на принципе вращающегося магнитного поля. Как его можно создать? Например, можно взять постоянный магнит и начать вращать его вокруг своей оси – получится вращающееся магнитное поле. Объяснить это явление можно тем, что магнит при вращении возбуждает в структуре диска индукционные токи или токи Фуко. Они всегда движутся по замкнутому кругу — нигде не начинаясь и нигде не заканчиваясь, и являются, по сути, токами короткого замыкания, которые разогревают металл и от которых обычно пытаются избавиться. Но в нашем случае они полезны, т.к. порождают во вращаемом диске магнитное поле, которое дальше взаимодействует с полем постоянного магнита. В асинхронных электродвигателях всё происходит по тому же принципу, только чтобы получить вращающееся поле, используют не постоянный магнит, а обмотки статора, в которых создаётся поле вращения. Условия для вращения можно создать только в многофазных системах, где ток сдвинут по фазе на определённый градус. Первый трёхфазный асинхронный двигатель был сделан русским учёным Доливо-Добровольским. Схема его работы показана на рисунке. Статор состоял из трёх обмоток (полюсов), отдалённых друг от друга на 120°. Вверху показан график синусоидального тока всех трёх полюсов, наложенных на один рисунок. В момент, когда ток одной из фаз равен нулю (отмечено пунктиром), две другие имеют значения близкие к максимальным и отличаются по направлению тока. Так между двумя работающими обмотками создаются магнитное поле. В следующий момент ситуация меняется – один из работающих полюсов отключается, оставшийся в работе меняет полярность (т.к. в обмотке меняется направление тока), а полюс только что включившийся в работу, поддерживает сместившееся магнитное поле. Магнитные линии пересекают часть металлического ротора и в нём генерируются вихревые токи. Они взаимодействуют с вращающимся полем статора и увлекаются за ним, пытаясь его догнать, и ротор проворачивается. Основной принцип работы асинхронного двигателя, созданного в позапрошлом веке, остаётся актуальным и для современных электродвигателей. Только вместо дисковых и цилиндровых роторов стали использовать короткозамкнутые роторы по типу «беличья клетка» и фазные роторы. Также изменилась форма обмоток статора – вместо катушек с полюсными наконечниками теперь делают радиальные обмотки, уложенные в пазы. Асинхронные двигатели хороши тем, что они не имеют скользящих контактов (ток в роторе индуцируется бесконтактно), а направление вращения легко поменять, изменив направление тока в одной из обмоток (поменяв фазы на клеммах мотора). Выше была рассмотрена работа статора с одной парой рабочих полюсов (двухполюсного с тремя обмотками). Количество оборотов в минуту такого электромотора равно частоте тока, т.е. 50 об/сек или 3000 об/мин. Изготавливают также 4-х и 6-ти полюсные электродвигатели с шестью и девятью обмотками соответственно. Частота вращения таких моторов составляет 1500 и 1000 об/мин. Подведём итоги. Принцип действия асинхронного двигателя основывается на создании в обмотках статора вращающегося магнитного поля, которое пересекает контур ротора и индуцирует в нём электродвижущую силу. Поскольку он замкнут на коротко, то в нём возникает переменный ток. Магнитное поле этого тока вместе с вращающимся магнитным полем статора создают крутящий момент. Ротор начинает крутиться и пытается сравнять свою скорость со скоростью убегающего поля статора. Но как только частота вращения ротора совпадёт с частотой вращения магнитного поля статора, в роторе затухнут все электромагнитные процессы и крутящий момент станет равным нулю. Ротор начинает отставать и магнитное поле статора снова начинает возбуждать контур ротора. Этот процесс будет повторяться всё снова и снова. Таким образом, частота вращения ротора стремится догнать частоту вращения магнитного поля статора, но всё время отстаёт, т.е. вращается не синхронно, а значит асинхронно. В станкостроении асинхронные двигатели не заменимы. Ни какой другой тип электромоторов не имеет такой высокой износоустойчивости и универсальности. Поэтому такое оборудование как станок для сетки рабицы, правильно-отрезной и просечно-вытяжной станки, выпускаемые на нашем предприятии, оснащены именно асинхронными электроприводами. На видео хорошо объясняется принцип работы асинхронного электродвигателя, его устройство и отличительные особенности • Скачать принцип работы трёхфазного асинхронного двигателя
Свежие записи: |
 А если крутить магнит возле медного диска, то он станет вращаться вслед за магнитом, пытаясь его догнать. Со стороны наблюдателя кажется, что между магнитом и диском есть невидимая вязкая связь. Их движение не синхронно, диск крутится с некоторым отставанием.
А если крутить магнит возле медного диска, то он станет вращаться вслед за магнитом, пытаясь его догнать. Со стороны наблюдателя кажется, что между магнитом и диском есть невидимая вязкая связь. Их движение не синхронно, диск крутится с некоторым отставанием.
 В быту используются двухфазные электродвигатели, где вторая фаза создаётся искусственно с помощью сдвигающего конденсатора, катушки или сопротивления. В промышленности применяют трёхфазные системы.
В быту используются двухфазные электродвигатели, где вторая фаза создаётся искусственно с помощью сдвигающего конденсатора, катушки или сопротивления. В промышленности применяют трёхфазные системы.
Принципы работы электрического двигателя для чайников
Июнь 29, 2014
52683 просмотров
Электродвигатель – это электротехническое устройство для преобразования электрической энергии в механическую. Сегодня повсеместно применяются электромоторы в промышленности для привода различных станков и механизмов.
В домашнем хозяйстве они установлены в стиральной машине, холодильнике, соковыжималке, кухонном комбайне, вентиляторах, электробритвах и т. п. Электродвигатели приводят в движение, подключенные к ней устройства и механизмы.
В этой статье Я расскажу о самых распространенных видах и принципах работы электрических двигателей переменного тока, широко используемых в гараже, в домашнем хозяйстве или мастерской.
Как работает электродвигатель
Двигатель работает на основе эффекта, обнаруженного Майклом Фарадеем еще в 1821 году. Он сделал открытие, что при взаимодействии электрического тока в проводнике и магнита может возникнуть непрерывное вращение.
Если в однородном магнитном поле расположить в вертикальном положении рамку и пропустить по ней ток, тогда вокруг проводника возникнет электромагнитное поле, которое будет взаимодействовать с полюсами магнитов. От одного рамка будет отталкиваться, а к другому притягиваться.
В результате рамка повернется в горизонтальное положения, в котором будет нулевым воздействие магнитного поля на проводник. Для того что бы вращение продолжилось необходимо добавить еще одну рамку под углом или изменить направление тока в рамке в подходящий момент.
На рисунке это делается при помощи двух полуколец, к которым примыкают контактные пластины от батарейки. В результате после совершения полуоборота меняется полярность и вращение продолжается.
В современных электродвигателях вместо постоянных магнитов для создания магнитного поля используются катушки индуктивности или электромагниты. Если разобрать любой мотор, то Вы увидите намотанные витки проволоки, покрытой изоляционным лаком. Эти витки и есть электромагнит или как их еще называют обмотка возбуждения.
В быту же постоянные магниты используются в детских игрушках на батарейках.
В других же более мощных двигателях используются только электромагниты или обмотки. Вращающаяся часть с ними называется ротор, а неподвижная- статор.
Виды электродвигателей
Сегодня существуют довольно много электродвигателей разных конструкций и типов. Их можно разделить по типу электропитания:
- Переменного тока, работающие напрямую от электросети.
- Постоянного тока, которые работают от батареек, АКБ, блоков питания или других источников постоянного тока.
По принципу работы:
- Синхронные, в которых есть обмотки на роторе и щеточный механизм для подачи на них электрического тока.
- Асинхронные, самый простой и распространенный вид мотора. В них нет щеток и обмоток на роторе.
Синхронный мотор вращается синхронно с магнитным полем, которое его вращает, а у асинхронного ротор вращается медленнее вращающегося магнитного поля в статоре .
Принцип работы и устройство асинхронного электродвигателя
В корпусе асинхронного двигателя укладываются обмотки статора (для 380 Вольт их будет 3), которые создают вращающееся магнитное поле. Концы их для подключения выводятся на специальную клеммную колодку.
Охлаждаются обмотки, благодаря вентилятору, установленному на вале в торце электродвигателя.
Ротор, являющиеся одним целым с валом, изготавливается из металлических стержней, которые замыкаются между собой с обоих сторон, поэтому он и называется короткозамкнутым.
Благодаря такой конструкции отпадает необходимость в частом периодическом обслуживании и замене токоподающих щеток, многократно увеличивается надежность, долговечность и безотказность.
Как правило, основной причиной поломки асинхронного мотора является износ подшипников, в которых вращается вал.
Принцип работы. Для того что бы работал асинхронный двигатель необходимо, что бы ротор вращался медленнее электромагнитного поля статора, в результате чего наводится ЭДС (возникает электроток) в роторе.
Здесь важное условие, если бы ротор вращался с такой же скоростью как и магнитное поле, то в нем по закону электромагнитной индукции не наводилось бы ЭДС и, следовательно не было бы вращения. Но в реальности, из-за трения подшипников или нагрузки на вал, ротор всегда будет вращаться медленнее.
Магнитные полюса постоянно вращаются в обмотках мотора, и постоянно меняется направление тока в роторе. В один момент времени, например направление токов в обмотках статора и ротора изображено схематично в виде крестиков (ток течет от нас) и точек (ток на нас). Вращающееся магнитное поле изображено изображено пунктиром.
Например, как работает циркулярная пила. Наибольшие обороты у нее без нагрузки. Но как только мы начинаем резать доску, скорость вращения уменьшается и одновременно с этим ротор начинает медленнее вращаться относительно электромагнитного поля и в нем по законам электротехники начинает наводится еще большей величины ЭДС.
Вырастает потребляемый ток мотором и он начинает работать на полной мощности. Если же нагрузка на вал будет столь велика, что его застопорит, то может возникнуть повреждение короткозамкнутого ротора из-за максимальной величины наводимой в нем ЭДС. Вот почему важно подбирать двигатель, подходящей мощности.
Если же взять большей, то неоправданными будут энергозатраты.
Скорость вращения ротора зависит от количества полюсов. При 2 полюсах скорость вращения будет равна скорости вращения магнитного поля, равного максимум 3000 оборотов в секунду при частоте сети 50 Гц. Что бы понизить скорость вдвое, необходимо увеличить количество полюсов в статоре до четырех.
Весомым недостатком асинхронных двигателей является то, что они подаются регулировке скорости вращения вала только при помощи изменения частоты электрического тока. А так не возможно добиться постоянной частоты вращения вала.
Принцип работы и устройство синхронного электродвигателя переменного тока
Данный вид электродвигателя используется в быту там, где необходима постоянная скорость вращения, возможность ее регулировки, а так же если необходима скорость вращения более 3000 оборотов в минуту (это максимум для асинхронных).
Синхронные моторы устанавливаются в электроинструменте, пылесосе, стиральной машине и т. д.
В корпусе синхронного двигателя переменного тока расположены обмотки (3 на рисунке), которые также намотаны и на ротор или якорь (1). Их выводы припаяны к секторам токосъемного кольца или коллектора (5), на которые при помощи графитовых щеток (4) подается напряжение. При чем выводы расположены так, что щетки всегда подают напряжение только на одну пару.
Наиболее частыми поломками коллекторных двигателей является:
- Износ щеток или их плохой их контакт из-за ослабления прижимной пружины.
- Загрязнение коллектора. Чистите либо спиртом или нулевой наждачной бумагой.
- Износ подшипников.
Принцип работы. Вращающий момент в электромоторе создается в результате взаимодействия между током тока якоря и магнитным потоком в обмотке возбуждения. С изменением направления переменного тока будет меняться и направление магнитного потока одновременно в корпусе и якоре, благодаря чему вращение всегда будет в одну сторону.
Регулировка скорости вращения меняется методом изменения величины подаваемого напряжения. В дрелях и пылесосах для этого используется реостат или переменное сопротивление.
- Изменение направления вращения происходит также как и у двигателей постоянного тока, о которых Я расскажу в следующей статье.
- Самое главное о синхронных двигателях Я постарался изложить, более подробно Вы можете прочитать на них на Википедии.
- Режимы работы электродвигателя в следующей статье.
Принцип действия электродвигателя постоянного тока
Электрический двигатель – неоценимое изобретение человека. Благодаря этому устройству наша цивилизация за последние сотни лет ушла далеко вперёд. Это настолько важно, что принцип работы электродвигателя изучают ещё со школьной скамьи.
Круговое вращение электроприводного вала легко трансформируется во все остальные виды движения. Поэтому любой станок, созданный для облегчения труда и сокращения времени на изготовление продукции, можно приспособить под выполнение множества задач.
Каков же принцип действия электродвигателя, как он работает и каково его устройство – обо всём этом понятным языком рассказывается в представленной статье.
Как работает двигатель постоянного тока
Подавляющее большинство электрических машин работает по принципу магнитного отталкивания и притяжения. Если между северным и южным полюсами магнита поместить проволоку и пропустить по ней ток, то её вытолкнет наружу.
Как это возможно? Дело в том, что проходя по проводнику, ток формирует вокруг себя круговое магнитное поле по всей длине провода. Направление этого поля определяют по правилу буравчика (винта).
При взаимодействии кругового поля проводника и однородного поля магнита, между полюсами магнитное поле с одной стороны ослабевает, а с другой усиливается.
То есть среда становится упругой и результирующая сила выталкивает провод из поля магнита под углом 90 градусов в направлении, определяемом по правилу левой руки (правило правой руки используется для генераторов, а правило левой руки подходит только для двигателей). Эта сила называется «амперовой» и её величина определяется по закону Ампера F=BхIхL, где В – значение магнитной индукции поля; I – ток, циркулирующий в проводнике; L – длина провода.
Это явление использовали как основной принцип работы первых электродвигателей, этот же принцип используют и поныне. В двигателях постоянного тока малой мощности для создания постоянного магнитного поля применяются постоянные магниты. В электромоторах средней и большой мощности однородное магнитное поле создают с помощью обмотки возбуждения или индуктора.
Рассмотрим принцип создания механического движения с помощью электричества более подробно. На динамической иллюстрации показан простейший электромотор. В однородном магнитном поле вертикально располагаем проволочную рамку и пропускаем по ней ток.
Что происходит? Рамка проворачивается и по инерции двигается какое-то время до достижения горизонтального положения. Это нейтральное положение – мёртвая точка — место, где воздействие поля на проводник с током равно нулю.
Чтобы движение продолжилось, нужно добавить ещё хотя бы одну рамку и обеспечить переключение направление тока в рамке в нужный момент. На обучающем видео внизу страницы хорошо виден этот процесс.
Принцип действия современных электродвигателей
Современный двигатель постоянного тока вместо одной рамки имеет якорь с множеством проводников, уложенных в пазы, а вместо постоянного подковообразного магнита имеет статор с обмоткой возбуждения с двумя и более полясами. На рисунке показан двухполюсный электромотор в разрезе.
Принцип его работы следующий.
Если по проводам верхней части якоря пропустить ток движущийся «от нас» (отмечено крестиком), а в нижней части — «на нас» (отмечено точкой), то согласно правилу левой руки верхние проводники будут выталкиваться из магнитного поля статора влево, а проводники нижней половины якоря по тому же принципу будут выталкиваться вправо. Поскольку медный провод уложен в пазах якоря, то, вся сила воздействия будет передаваться и на него, и он будет проворачиваться. Дальше видно, что когда проводник с направлением тока «от нас» провернётся вниз и станет против южного полюса создаваемого статором, то он будет выдавливаться в левую сторону, и произойдёт торможение. Чтобы этого не случилось нужно поменять направление тока в проводе на противоположное, как только будет пересечена нейтральная линия. Это делается с помощью коллектора – специального переключателя, коммутирующего обмотку якоря с общей схемой электродвигателя.
Таким образом, обмотка якоря передаёт вращающий момент на вал электромотора, а тот в свою очередь приводит в движение рабочие механизмы любого оборудования, такого как, например, станок для сетки рабицы.
Хотя в этом случае используется асинхронный двигатель переменного тока, основной принцип его работы идентичен принципу действия двигателя постоянного тока – это выталкивание проводника с током из магнитного поля.
Только у асинхронного электромотора вращающееся магнитное поле, а у электродвигателя постоянного тока – поле статичное.
Продолжая тему двигателя постоянного тока нужно отметить, что принцип действия электродвигателя основывается на инвертировании постоянного тока в якорной цепи, чтобы не было торможения, и вращение ротора поддерживалось в постоянном ритме. Если изменить направление тока в возбуждающей обмотке статора, то, согласно правилу левой руки, изменится направление вращения ротора.
То же самое произойдёт, если мы поменяем местами щёточные контакты, подводящие питание от источника к якорной обмотке. А вот если поменять «+» «-» и там и там, то направление вращения вала не изменится. Поэтому, в принципе, для питания такого мотора можно использовать и переменный ток, т.к. ток в индукторе и якоре будет меняться одновременно.
На практике такие устройства используются редко.
Что касается электрической схемы включения двигателя, то их несколько и они показаны на рисунке. При параллельном соединении обмоток, обмотка якоря делается из большого количества витков тонкой проволоки. При таком подключении коммутируемый коллектором ток будет значительно меньше из-за большого сопротивления и пластины не будут сильно искрить и выгорать.
Если делать последовательное соединение обмоток индуктора и якоря, то обмотка индуктора делается из провода большего диаметра с меньшим количеством витков, т.к. весь якорный ток устремляется через статорную обмотку.
При таких манипуляциях с пропорциональным изменением значений тока и количества витков, намагничивающая сила остаётся постоянной, а качественные характеристики устройства становятся лучше.
На сегодняшний день двигатели постоянного тока мало используются на производстве. Из недостатков этого типа электрических машин можно отметить быстрый износ щёточно-коллекторного узла. Преимущества – хорошие характеристики запуска, лёгкая регулировка частоты и направления вращения, простота устройства и управления.
• Скачать лекцию: двигатели постоянного тока
Свежие записи:
Синхронный электродвигатель с обмоткой возбуждения
Дмитрий Левкин
Конструкция синхронного электродвигателя с обмоткой возбуждения
Синхронный электродвигатель с обмоткой возбуждения, как и любой вращающийся электродвигатель, состоит из ротора и статора. Статор — неподвижная часть, ротор — вращающаяся часть. Статор обычно имеет стандартную трехфазную обмотку, а ротор выполнен с обмоткой возбуждения. Обмотка возбуждения соединена с контактными кольцами к которым через щетки подходит питание.
Синхронный электродвигатель с обмоткой возбуждения (щетки не показаны)
Принцип работы
Постоянная скорость вращения синхронного электродвигателя достигается за счет взаимодействия между постоянным и вращающимся магнитным полем. Ротор синхронного электродвигателя создает постоянное магнитное поле, а статор – вращающееся магнитное поле.
Работа синхронного электродвигателя основана на взаимодействии вращающегося магнитного поля статора и постоянного магнитного поля ротора
Статор: вращающееся магнитное поле
На обмотки катушек статора подается трехфазное переменное напряжение. В результате создается вращающееся магнитное поле, которое вращается со скоростью пропорциональной частоте питающего напряжения. Подробнее о том, как посредством трехфазного напряжения питания образуется вращающееся магнитное поле можно прочитать в статье «Трехфазный асинхронный электродвигатель».
Взаимодействие между вращающимся (у статора) и постоянным (у ротора) магнитными полями
Ротор: постоянное магнитное поле
Обмотка ротора возбуждается источником постоянного тока через контактные кольца. Магнитное поле создаваемое вокруг ротора возбуждаемое постоянным током показано ниже.
Очевидно, что ротор ведет себя как постоянный магнит, так как имеет такое же магнитное поле (в качестве альтернативы можно представить, что ротор сделан из постоянных магнитов). Рассмотрим взаимодействие ротора и вращающегося магнитного поля.
Предположим вы придали ротору начальное вращение в том же направлении как у вращающегося магнитного поля. Противоположные полюса вращающегося магнитного поля и ротора будут притягиваться друг к другу и они будут сцепляться с помощью магнитных сил.
Это значит, что ротор будет вращаться с той же скоростью, что и вращающееся магнитное поле, то есть ротор будет вращаться с синхронной скоростью.
Магнитные поля ротора и статора сцепленные друг с другом
Синхронная скорость
Скорость с которой вращается магнитное поле может быть вычислена по следующему уравнению:
- где Ns – частота вращения магнитного поля, об/мин,
- f – частота тока статора, Гц,
- p – количество пар полюсов.
Это значит, что скорость синхронного электродвигателя может очень точно контролироваться изменением частоты питающего тока. Таким образом эти электродвигатели подходят для высокоточных приложений.
Прямой запуск синхронного двигателя от электрической сети
Почему синхронные электродвигатели не запускаются от электрической сети?
Если ротор не имеет начального вращения, ситуация отличается от описанной выше. Северный полюс магнитного поля ротора будет притягиваться к южному полюсу вращающегося магнитного поля, и начнет двигаться в том же направлении.
Но так как ротор имеет определенный момент инерции, его стартовая скорость будет очень низкой. За это время южный полюс вращающегося магнитного поля будет замещен северным полюсом. Таким образом появятся отталкивающие силы.
В результате чего ротор начнет вращаться в обратную сторону. Таким образом ротор не сможет запуститься.
Демпферная обмотка — прямой запуск синхронного двигателя от электрической сети
Чтобы реализовать самозапуск синхронного электродвигателя без системы управления между наконечниками ротора размещается «беличья клетка», которая также называется демпферной обмоткой.
При запуске электродвигателя катушки ротора не возбуждаются.
Под действием вращающегося магнитного поля, индуцируется ток в витках «беличьей клетки» и ротор начинает вращаться подобно тому, как запускаются асинхронные двигатели.
Когда ротор достигает своей максимальной скорости, подается питание на обмотку возбуждения ротора. В результате, как говорилось ранее, полюса ротора сцепляются с полюсами вращающегося магнитного поля и ротор начинает вращаться с синхронной скоростью.
При вращении ротора с синхронной скоростью, относительное движение между белечьей клеткой и вращающимся магнитным полем равно нулю.
Это значит, что отсутствует ток в короткозамкнутых витках, а следовательно «беличья клетка» не оказывает воздействия на синхронную работу электродвигателя.
Выход из синхронизма
Синхронные электродвигатели имеют постоянную скорость независящую от нагрузки (при условии что нагрузка не превышает макимально допустимую). Если момент нагрузки больше, чем момент создаваемый самим электродвигателем, то он выйдет из синхронизма и остановиться. Низкое напряжение питания и низкое напряжение возбуждения также могут быть причинами выхода двигателя из синхронизма.
Синхронный компенсатор
Синхронные электродвигатели могут также использоваться для улучшения коэффициента мощности системы. Когда единственной целью использования синхронных электродвигателей является улучшение коэффициента мощности их называют синхронными компенсаторами. В таком случае вал электродвигателя не соединяется с механической нагрузкой и вращается свободно.
Принципы работы электрического двигателя для чайников
Главная › Электрика ›
26.05.2019
Курс электрических машин посвящён изучению принципов построения, конструкций, технических и эксплуатационных характеристик трансформаторов, а также генераторов и двигателей постоянного и переменного тока. Этот курс является основным разделом электротехники, наряду с теорией линейных электрических цепей и электрическим приводом.
- Цель курса – получение базовых знаний в области теории электрических машин, достаточных для специалистов технических направлений подготовки неэлектротехнических профилей, а также для всех желающих познакомиться с основами электротехники и получить навыки решения задач, связанных с эксплуатацией электрических машин.
- При изучении каждого из десяти разделов курса используются виртуальные лаборатории, характер которых соответствует задачам повседневной инженерной практики.
- После окончания курса слушатели будут знать принципы построения, конструкции, технические и эксплуатационные характеристики трансформаторов, генераторов и двигателей постоянного и переменного тока, а также приобретут навыки решения задач, связанных с эксплуатацией электрических машин.
Программа курса
- Катушка с магнитопроводом в цепи переменного тока.
- Преобразование энергии трансформатором.
- Специальные типы трансформаторов и их применение в технике.
- Магнитные поля бесколлекторных машин.
- Конструкция, принцип действия и характеристики асинхронного двигателя.
- Управление асинхронным двигателем. Специальные типы двигателей.
- Конструкция принцип действия и характеристики синхронных машин.
- Синхронные двигатели.
- Двигатели постоянного тока.
- Управление двигателем постоянного тока. Специальные типы коллекторных машин и вентильные двигатели.
Каждая тема предполагает изучение в течение одной недели.
На 6-й и 12-й неделях запланированы упражнения по пройденному материалу.
В курсе имеется два типа дедлайна (предельного срока выполнения оценивающих мероприятий):
– мягкий дедлайн, при котором необходимо выполнить все оценивающие мероприятия текущей недели до ее завершения;
– жесткий дедлайн, при котором на выполнение оценивающих мероприятий после мягкого дедлайна дополнительно выделяется еще две недели, по окончании которых доступ к соответствующим мероприятиям закрывается.
Принципы работы электрического двигателя для чайников Ссылка на основную публикацию
Электрические машины постоянного тока: виды и принцип их работы
Машины постоянного тока представляют собой возвратную электрическую машину, в которых происходит процесс преобразования энергии. В машинах, где механическая энергия преобразуется в электрическую, называются генераторами. Они предназначены для выработки электроэнергии. Для работы необходимо наличие какого-либо двигателя (дизеля, паровой или водяной турбины), который будет вращать вал генератора.
Обратное преобразование энергий происходит в электродвигателях. Они приводят в движение колесные пары локомотивов, вращают валы вентиляторов и т.д. Для работы необходимо подсоединение электродвигателя с источником электроэнергии посредством проводов.
Принцип работы электрических машин постоянного тока основан на использовании явления электромагнитной индукции, а также законов, которые определяют взаимодействие электрических токов и магнитных полей.
Эти машины включают в себя неподвижную и вращающуюся части. В конструкцию неподвижной части, или статора входят станина, главные и дополнительные полюса, подшипниковые щиты и щеточная траверса с графитовыми или медно-графитовыми щетками.
Вращающаяся часть, или ротор, в электрических машинах постоянного тока именуются якорем. Якорь, снабженный коллектором, в электродвигателях играет роль преобразователя частоты, а в генераторах – выпрямителя.
При вращении машины происходит перемещение якоря и статора относительно друг друга. Статор создает магнитное поле, а в обмотке якоря индуцируется э. д. с. Возникает ток, который при воздействии с магнитным полем создает электромагнитные силы, отвечающие за процесс преобразования энергии.
Электрические машины постоянного тока в зависимости от наличия или отсутствия коммутации бывают обычными и униполярными, а по расположению вала — вертикальными и горизонтальными.
По типу переключателей тока их можно подразделить на машины с щеточно-коллекторным и электронным переключателем. Последние называются еще вентильными электродвигателями.
По мощности они делятся на микромашины мощностью до 0,5 кВт, а также, машины малой, средней и большой мощности — 0,5-10 кВт, 10-200 кВт и более 200 кВт соответственно.
По частоте вращения различают тихоходные (до 300 об/мин), средней быстроходности (300-500 об/мин), быстроходные (1500-6000 об/мин) и сверхбыстроходные (более 6000 об/мин) электрические машины постоянного тока.
Устройство и принцип действия синхронного двигателя
Синхронный электродвигатель – это устройство, преобразующее электрическую энергию в механическую. Его также можно использовать в качестве генератора. Чаще всего он применяется в компрессорах, прокатных станках, поршневых насосах и другом подобном оборудовании. Рассмотрим принцип действия синхронного электродвигателя, его характеристики и свойства.
Устройство синхронного электродвигателя
Строение агрегата данного вида типично. Двигатель состоит из:
- Неподвижной части (якорь или статор).
- Подвижной части (ротор или индуктор).
- Вентилятора.
- Контактных колец.
- Щеток.
- Возбудителя.
Статор представляет собой сердечник, состоящий из обмоток, который заключен в корпус. Индуктор комплектуется электромагнитами постоянного тока (полюсами).
Конструкция индуктора может быть двух видов – явнополюсная и неявнополюсная. В статоре и роторе расположены ферромагнитные сердечники, изготовленные из специальной электротехнической стали.
Они необходимы для уменьшения магнитного сопротивления и улучшения прохождения магнитного потока.
Частота вращения ротора в синхронном двигателе равна частоте вращения магнитного поля. Независимо от подключаемой нагрузки частота ротора неизменна, так как число пар полюсов магнитного поля и ротора совпадают. Их взаимодействие обеспечивает постоянную угловую скорость, не зависящую от момента, приложенного к валу.
Принцип работы синхронного электродвигателя
Самые распространенные типы такого рода агрегатов – однофазный и трехфазный. Принцип работы синхронного электродвигателя в обоих случаях примерно одинаков. После подключения обмотки якоря к сети ротор остается неподвижным, в то время как постоянный ток поступает в обмотку возбуждения.
Направление электромагнитного момента меняется дважды за время одного изменения напряжения.
При значении среднего момента равном нулю, ротор под влиянием внешнего момента (механического воздействия) разгоняется до частоты, близкой по значению частоте вращения магнитного поля в зазоре, после чего двигатель переходит в синхронный режим.
В трехфазном устройстве проводники расположены под определенным углом относительно друг друга. В них возбуждается вращающееся с синхронной скоростью электромагнитное поле.
Разгон двигателя может осуществляться в двух режимах:
- Асинхронный. Обмотки индуктора замыкаются с помощью реостата. Вращающееся магнитное поле, возникающее при включении напряжения, пересекает короткозамкнутую обмотку, установленную на роторе. В ней индуцируются токи, взаимодействующие с вращающимся полем статора. По достижении синхронной скорости крутящий момент начинает уменьшаться и сводится к нулю после замыкания магнитного поля.
- С помощью вспомогательного двигателя. Для этого синхронный двигатель механически соединяется со вспомогательным (двигателем постоянного тока либо трехфазным индукционным двигателем). Постоянный ток подается только после того, как вращение двигателя достигает скорости, близкой к синхронной. Магнитное поле замыкается, и связь со вспомогательным двигателем прекращается.
Характеристики синхронного электродвигателя
Хотя асинхронные двигатели считаются более надежными и дешевыми, их синхронные «собратья» имеют некоторые преимущества и широко применяются в различных областях промышленности. К отличительным характеристикам синхронного электродвигателя можно отнести:
- Работу при высоком значении коэффициента мощности.
- Высокий КПД по сравнению с асинхронным устройством той же мощности.
- Сохранение нагрузочной способности даже при снижении напряжения в сети.
- Неизменность частоты вращения независимо от механической нагрузки на валу.
- Экономичность.
Синхронным двигателям также присущи некоторые недостатки:
- Достаточно сложная конструкция, делающая их производство дороже.
- Необходимость источника постоянного тока (возбудителя или выпрямителя).
- Сложность пуска.
- Необходимость корректировать угловую частоту вращения путем изменения частоты питающего напряжения.
Однако в некоторых случаях использование синхронных двигателей предпочтительнее:
- Для улучшения коэффициента мощности.
- В длительных технологических процессах, где нет необходимости в частых запусках и остановках.
Таким образом, «плюсы» двигателей такого типа значительно превосходят «минусы», поэтому на данный момент они высоко востребованы.
Изучив синхронный двигатель, устройство и принцип его действия и учтя условия, в которых он будет эксплуатироваться, вы сможете быстро и с легкостью подобрать оптимально подходящий для ваших целей тип агрегата (защищенный, закрытый, открытый) и использовать его с максимальной эффективностью.
Асинхронный электродвигатель принцип работы для чайников
Основа работы электрического двигателя, как постоянного тока, так и переменного тока зиждется в силе Ампера. Ежели не впетрить как она получается, то ничего и непонятно будет никогда.
П.С. На самом-то деле там векторное произведение и дифференциалы, но это детали, а у нас упрощённый, частный случай.
Направление силы ампера определяется правилом левой руки.
Мысленно ставим левую ладонь на верхний рисунок и получаем направление сил Ампера. Она типа растягивают рамку с током в том положении как нарисовано на рис.1. И никуда вертеться тут ничего не будет, рамка в равновесии, устойчивом.
А если рамка с током повернута по-другому, то вот что будет:
Здесь уже равновесия нет, сила Ампера разворачивает противоположные стенки так, что рамка начинает вращаться. Появляется механическое вращение. Это основа электрического двигателя, самая суть, дальше только детали.
Теперь что будет делать рамка с током на рис.3?. Если система идеальная, без трения, то очевидно будут колебания. Если трение присутствует, то колебания постепенно затухнут, рамка с током стабилизируется и станет как на рис.1.
Но нам нужно постоянное вращение и достичь его можно двумя принципиально разными способами и отсюда и возникает разница между двигателями постоянного и электрического тока.
Способ 1. Смена направления тока в рамке.
Этот способ используется в двигателях постоянного тока и его потомках.
Наблюдаем за картинками. Пусть наш двигатель обесточен и рамка с током ориентирована как-то хаотично, вот так например:
Рис.4.1 Случайно расположенная рамка
На случайно расположенную рамку действует сила Ампера и она начинает вращаться.
В процессе движения рамка достигает угла 90°. Момент (момент пары сил или вращательный момент) максимальный.
И вот рамка достигает положения, когда момента вращения нет. И если сейчас не отключить ток, на сила Ампера будет уже тормозить рамку и в конце полуоборота рамка остановится и начнёт вращение в противоположном направлении. Но нам ведь этого не надо.
Поэтому мы на рис.3 делаем хитрый ход – меняем направление тока в рамке.
И вот после пересечения этого положения, рамка с поменянным направлением тока уже не тормозится, а снова разгоняется.
А когда рамка подходит к следующему положению равновесия, мы меняем ток ещё раз.
И рамка опять продолжает ускоряться куда нам надо.
Вот так и получается постоянное вращение. Красиво? Красиво. Нужно только менять направление тока два раза за оборот и всего делов.
А делает это, т.е. обеспечивает смену тока специальный узел – щёточно-коллекторный узел. Принципиально он устроен так:
Рисунок понятен и без пояснений. Рамка трётся то об один контакт, то об другой и так вот ток и меняется.
Очень важная особенность щёточно-коллекторного узла – его малый ресурс. Из-за трения. Например, вот движок ДПР-52-Н1 – минимальная наработка 1000 часов. В то же время срок службы современных бесколлекторных двигателей более 10000 часов, а двигателей переменного тока (там тоже нет ЩКУ) более 40000 часов.
ПостСкриптум. Кроме стандартного двигателя постоянного тока (стандартного это значит с щёточно-коллекторным узлом) есть ещё его развитие: бесколлекторный двигатель постоянного тока (БДПТ) и вентильный двигатель.
БДПТ отличается тем, что ток там меняется электронным способом (закрываются и открываются транзисторы), а вентильный ещё круче, он ещё и ток меняет, управляя моментом. И вообще БПДТ с вентильным по сложности сравнимы с электроприводом, ибо имеют всякие датчики положения ротора (датчики Холла например) и сложный электронный контроллер.
Отличие БДПТ от вентильного двигателя в форме противо-ЭДС. У БДПТ там трапеция (грубое изменение), а у вентильного двигателя – синусоида, более плавное значит.
По-английски БДПТ это BLDC, а вентильный двигатель это PMSM.
Способ 2. Вращается магнитный поток, т.е. магнитное поле.
Вращающееся магнитное поле получают с помощью переменного трёхфазного тока. Вот есть статор.
А есть значит 3 фазы переменного тока.
Между ними как видно 120 градусов, электрических градусов.
Эти три фазы укладывают в статор специальным образом, чтобы они геометрически были повернуты друг к дружке на 120°.
И тогда при подаче трёхфазного питания получается само собой за счёт складывания магнитных потоков от трёх обмоток вращающееся магнитное поле.
Далее вращающееся магнитное поле «давит» силой Ампера на нашу рамку и она вращается.
Но здесь есть тоже различия, два разных способа.
Способ 2а. Рамка запитывается (синхронный двигатель).
Подаём значит на рамку напряжение (постоянное), рамка выставляется по магнитному полю. Помните рис.1 из самого начала? Вот так рамка и становится.
Но поле магнитное у нас тут вращается, а не просто так висит. Рамка чего будет делать? Тоже будет вращаться, следуя за магнитным полем.
Они (рамка и поле) вращаются с одинаковой частотой, или синхронно, поэтому такие двигатели называются синхронными двигателями.
Способ 2б. Рамка не запитывается (асинхронный двигатель).
Фишка в том, что рамка не запитывается, совсем не запитывается. Просто проволока такая замкнутая.
Когда мы начинаем вращать магнитное поле, по законам электромагнетизма в рамке наводится ток. От этого тока и магнитного поля получается сила Ампера. Но сила Ампера будет возникать только если рамка движется относительно магнитного поля (известная история с опытами Ампера и его походами в соседнюю комнату).
Так что рамка всегда будет отставать от магнитного поля. А то, если она его вдруг почему-то догонит, то пропадёт наводка от поля, пропадёт ток, пропадёт сила Ампера и всё вообще пропадёт. То есть, в асинхронном двигателе рамка всегда отстаёт от поля и частота у них значит разная, то есть вращаются они асинхронно, поэтому и двигатель называется асинхронным.
8 марта 1889 года величайший русский учёный и инженер Михаил Осипович Доливо-Добровольский изобрёл трёхфазный асинхронный двигатель с короткозамкнутым ротором.
Современные трёхфазные асинхронные двигатели являются преобразователями электрической энергии в механическую. Благодаря своей простоте, низкой стоимости и высокой надёжности асинхронные двигатели получили широкое применение. Они присутствуют повсюду, это самый распространённый тип двигателей, их выпускается 90% от общего числа двигателей в мире. Асинхронный электродвигатель поистине совершил технический переворот во всей мировой промышленности.
Огромная популярность асинхронных двигателей связана с простотой их эксплуатации, дешивизной и надежностью.
Асинхронный двигатель — это асинхронная машина, предназначенная для преобразования электрической энергии переменного тока в механическую энергию. Само слово “асинхронный” означает не одновременный. При этом имеется ввиду, что у асинхронных двигателей частота вращения магнитного поля статора всегда больше частоты вращения ротора. Работают асинхронные двигатели, как понятно из определения, от сети переменного тока.
Устройство
На рисунке: 1 — вал, 2,6 — подшипники, 3,8 — подшипниковые щиты, 4 — лапы, 5 — кожух вентилятора, 7 — крыльчатка вентилятора, 9 — короткозамкнутый ротор, 10 — статор, 11 — коробка выводов.
Основными частями асинхронного двигателя являются статор (10) и ротор (9).
Статор имеет цилиндрическую форму, и собирается из листов стали. В пазах сердечника статора уложены обмотки статора, которые выполнены из обмоточного провода. Оси обмоток сдвинуты в пространстве относительно друг друга на угол 120°. В зависимости от подаваемого напряжения концы обмоток соединяются треугольником или звездой.
Роторы асинхронного двигателя бывают двух видов: короткозамкнутый и фазный ротор.
Короткозамкнутый ротор представляет собой сердечник, набранный из листов стали. В пазы этого сердечника заливается расплавленный алюминий, в результате чего образуются стержни, которые замыкаются накоротко торцевыми кольцами. Эта конструкция называется «беличьей клеткой«. В двигателях большой мощности вместо алюминия может применяться медь. Беличья клетка представляет собой короткозамкнутую обмотку ротора, откуда собственно название.
Фазный ротор имеет трёхфазную обмотку, которая практически не отличается от обмотки статора. В большинстве случаев концы обмоток фазного ротора соединяются в звезду, а свободные концы подводятся к контактным кольцам. С помощью щёток, которые подключены к кольцам, в цепь обмотки ротора можно вводить добавочный резистор. Это нужно для того, чтобы можно было изменять активное сопротивление в цепи ротора, потому что это способствует уменьшению больших пусковых токов. Подробнее о фазном роторе можно прочитать в статье — асинхронный двигатель с фазным ротором.
Принцип работы
При подаче к обмотке статора напряжения, в каждой фазе создаётся магнитный поток, который изменяется с частотой подаваемого напряжения. Эти магнитные потоки сдвинуты относительно друг друга на 120°, как во времени, так и в пространстве. Результирующий магнитный поток оказывается при этом вращающимся.
Результирующий магнитный поток статора вращается и тем самым создаёт в проводниках ротора ЭДС. Так как обмотка ротора, имеет замкнутую электрическую цепь, в ней возникает ток, который в свою очередь взаимодействуя с магнитным потоком статора, создаёт пусковой момент двигателя, стремящийся повернуть ротор в направлении вращения магнитного поля статора. Когда он достигает значения, тормозного момента ротора, а затем превышает его, ротор начинает вращаться. При этом возникает так называемое скольжение.
Скольжение s — это величина, которая показывает, насколько синхронная частота n1 магнитного поля статора больше, чем частота вращения ротора n2, в процентном соотношении.
Скольжение это крайне важная величина. В начальный момент времени она равна единице, но по мере возрастания частоты вращения n2 ротора относительная разность частот n1-n2 становится меньше, вследствие чего уменьшаются ЭДС и ток в проводниках ротора, что влечёт за собой уменьшение вращающего момента. В режиме холостого хода, когда двигатель работает без нагрузки на валу, скольжение минимально, но с увеличением статического момента, оно возрастает до величины sкр — критического скольжения. Если двигатель превысит это значение, то может произойти так называемое опрокидывание двигателя, и привести в последствии к его нестабильной работе. Значения скольжения лежит в диапазоне от 0 до 1, для асинхронных двигателей общего назначения оно составляет в номинальном режиме — 1 — 8 %.
Как только наступит равновесие между электромагнитным моментом, вызывающим вращение ротора и тормозным моментом создаваемым нагрузкой на валу двигателя процессы изменения величин прекратятся.
Выходит, что принцип работы асинхронного двигателя заключается во взаимодействии вращающегося магнитного поля статора и токов, которые наводятся этим магнитным полем в роторе. Причём вращающий момент может возникнуть только в том случае, если существует разность частот вращения магнитных полей.
В промышленности наибольшее распространение получили асинхронные двигатели трехфазного тока. Рассмотрим устройство и принцип действия этих двигателей.
Принцип действия асинхронного двигателя основан на использовании вращающегося магнитного поля.
Для уяснения работы такого двигателя проделаем следующий опыт.
Укрепим подковообразный магнит на оси таким образом, чтобы его можно было вращать за ручку. Между полюсами магнита расположим на оси медный цилиндр, могущий свободно вращаться.
Рисунок 1. Простейшая модель для получения вращающегося магнитного поля
Начнем вращать магнит за ручку по часовой стрелке. Поле магнита также начнет вращаться и при вращении будет пересекать своими силовыми линиями медный цилиндр. В цилиндре, по закону электромагнитной индукции, возникнут вихревые токи, которые создадут свое собственное магнитное поле — поле цилиндра. Это поле будет взаимодействовать с магнитным полем постоянного магнита, в результате чего цилиндр начнет вращаться в ту же сторону, что и магнит.
Установлено, что скорость вращения цилиндра несколько меньше скорости вращения поля магнита.
Действительно, если цилиндр вращается с той же скоростью, что и магнитное поле, то магнитные силовые линии не пересекают его, а следовательно, в нем не возникают вихревые токи, вызывающие вращение цилиндра.
Скорость вращения магнитного поля принято называть синхронной , так как она равна скорости вращения магнита, а скорость вращения цилиндра — асинхронной (несинхронной). Поэтому сам двигатель получил название асинхронного двигателя . Скорость вращения цилиндра (ротора) отличается от синхронной скорости вращения магнитного поля на небольшую величину, называемую скольжением.
Обозначив скорость вращения ротора через n1 и скорость вращения поля через n мы можем подсчитать величину скольжения в процентах по формуле:
В приведенном выше опыте вращающееся магнитное поле и вызванное им вращение цилиндра мы получали благодаря вращению постоянного магнита, поэтому такое устройство еще не является электродвигателем . Надо заставить электрический ток создавать вращающееся магнитное поле и использовать его для вращения ротора. Задачу эту в свое время блестяще разрешил М. О. Доливо-Добровольский. Он предложил использовать для этой цели трехфазный ток.
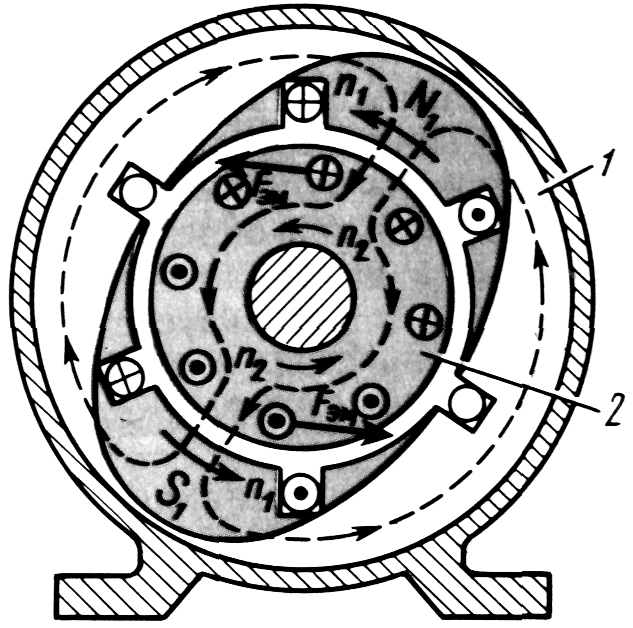
Устройство асинхронного электродвигателя М. О. Доливо-Добровольского
Рисунок 2. Схема асинхронного электродвигателя Доливо-Добровольского
На полюсах железного сердечника кольцевой формы, называемого статором электродвигателя , помещены три обмотки, сети трехфазного тока 0 расположенные одна относительно другой под углом 120°.
Внутри сердечника укреплен на оси металлический цилиндр, называемый ротором электродвигателя.
Если обмотки соединить между собой так, как показано на рисунке, и подключить их к сети трехфазного тока, то общий магнитный поток, создаваемый тремя полюсами, окажется вращающимся.
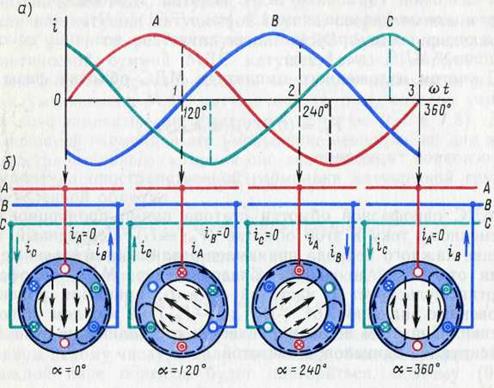
На рисунке 3 показан график изменения токов в обмотках двигателя и процесс возникновения вращающегося магнитного поля.
Рассмотрим — подробнее этот процесс.
Рисунок 3. Получение вращающегося магнитного поля
В положении «А» на графике ток в первой фазе равен нулю, во второй фазе он отрицателен, а в третьей положителен. Ток по катушкам полюсов потечет в направлении, указанном на рисунке стрелками.
Определив по правилу правой руки направление созданного током магнитного потока, мы убедимся, что на внутреннем конце полюса (обращенном к ротору) третьей катушки будет создан южный полюс (Ю), а на полюсе второй катушки — северный полюс (С). Суммарный магнитный поток будет направлен от полюса второй катушки через ротор к полюсу третьей катушки.
В положении «Б» на графике ток во второй фазе равен нулю, в первой фазе он положителен, а в третьей отрицателен. Ток, протекая по катушкам полюсов, создает на конце первой катушки южный полюс (Ю), на конце третьей катушки северный полюс (С). Суммарный магнитный поток теперь будет направлен от третьего полюса через ротор к первому полюсу, т. е. полюсы при этом переместятся на 120°.
В положении «В» на графике ток в третьей фазе равен нулю, во второй фазе он положителен, а в первой отрицателен. Теперь ток, протекая по первой и второй катушкам, создаст на конце полюса первой катушки — северный полюс (С), а на конце полюса второй катушки — южный полюс (Ю), т. е. полярность суммарного магнитного поля переместится еще на 120°. В положении «Г» на графике магнитное поле переместится еще на 120°.
Таким образом, суммарный магнитный поток будет менять свое направление с изменением направления тока в обмотках статора (полюсов).
При этом за один период изменения тока в обмотках магнитный поток сделает полный оборот. Вращающийся магнитный поток будет увлекать за собой цилиндр, и мы получим таким образом асинхронный электродвигатель.
Напомним, что на рисунке 3 обмотки статора соединены «звездой», однако вращающееся магнитное поле образуется и при соединении их «треугольником».
Если мы поменяем местами обмотки второй и третьей фаз, то магнитный поток изменит направление своего вращения на обратное.
Такого же результата можно добиться, не меняя местами обмотки статора, а направляя ток второй фазы сети в третью фазу статора, а третью фазу сети — во вторую фазу статора.
Таким образом, изменить направление вращения магнитного поля можно переключением двух любых фаз.
Мы рассмотрели устройство асинхронного двигателя, имеющего на статоре три обмотки . В этом случае вращающееся магнитное поле двухполюсное и число его оборотов в одну секунду равно числу периодов изменения тока в одну секунду.
Если на статоре разместить по окружности шесть обмоток, то будет создано четырехполюсное вращающееся магнитное поле . При девяти обмотках поле будет шестиполюсным.
При частоте трехфазного тока f , равной 50 периодам в секунду, или 3000 в минуту, число оборотов n вращающегося поля в минуту будет:
при двухполюсном статоре n = (50 х 60 ) / 1 = 3000 об/мин,
при четырехполюсном статоре n = (50 х 60 ) / 2 = 1500 об/мин,
при шестиполюсном статоре n = (50 х 60 ) / 3 = 1000 об/мин,
при числе пар полюсов статора, равном p : n = (f х 60 ) / p ,
Итак, мы установили скорость вращения магнитного поля и зависимость ее от числа обмоток на статоре двигателя.
Ротор же двигателя будет, как нам известно, несколько отставать в своем вращении.
Однако отставание ротора очень небольшое. Так, например, при холостом ходе двигателя разность скоростей составляет всего 3%, а при нагрузке 5 — 7%. Следовательно, обороты асинхронного двигателя при изменении нагрузки изменяются в очень небольших пределах, что является одним из его достоинств.
Рассмотрим теперь устройство асинхронных электродвигателей
Статор современного асинхронного электродвигателя имеет невыраженные полюсы, т. е. внутренняя поверхность статора сделана совершенно гладкой.
Чтобы уменьшить потери на вихревые токи, сердечник статора набирают из тонких штампованных стальных листов. Собранный сердечник статора закрепляют в стальном корпусе.
В пазы статора закладывают обмотку из медной проволоки. Фазовые обмотки статора электродвигателя соединяются «звездой» или «треугольником», для чего все начала и концы обмоток выводятся на корпус — на специальный изоляционный щиток. Такое устройство статора очень удобно, так как позволяет включать его обмотки на разные стандартные напряжения.
Ротор асинхронного двигателя , подобно статору, набирается из штампованных листов стали. В пазы ротора закладывается обмотка.
В зависимости от конструкции ротора асинхронные электродвигатели делятся на двигатели с короткозамкнутым ротором и фазным ротором .
Обмотка короткозамкнутого ротора сделана из медных стержней, закладываемых в пазы ротора. Торцы стержней соединены при помощи медного кольца. Такая обмотка называется обмоткой типа «беличьей клетки». Заметим, что медные стержни в пазах не изолируются.
В некоторых двигателях «беличью клетку» заменяют литым ротором.
Асинхронный двигатель с фазным ротором (с контактными кольцами) применяется обычно в электродвигателях большой мощности и в тех случаях; когда необходимо, чтобы электродвигатель создавал большое усилие при трогании с места. Достигается это тем, что в обмотки фазного двигателя включается пусковой реостат.
Короткозамкнутые асинхронные двигатели пускаются в ход двумя способами:
1) Непосредственным подключением трехфазного напряжения сети к статору двигателя. Этот способ самый простой и наиболее популярный.
2) Снижением напряжения, подводимого к обмоткам статора. Напряжение снижают, например, переключая обмотки статора со «звезды» на «треугольник».
Пуск двигателя в ход происходит при соединении обмоток статора «звездой», а когда ротор достигнет нормального числа оборотов, обмотки статора переключаются на соединение «треугольником».
Ток в подводящих проводах при этом способе пуска двигателя уменьшается в 3 раза по сравнению с тем током, который возник бы при пуске двигателя прямым включением в сеть с обмотками статора, соединенными «треугольником». Однако этот способ пригоден лишь в том случае, если статор рассчитан для нормальной работы при соединении его обмоток «треугольником».
Наиболее простым, дешевым и надежным является асинхронный электродвигатель с короткозамкнутым ротором , но этот двигатель обладает некоторыми недостатками — малым усилием при трогании с места и большим пусковым током. Эти недостатки в значительной мере устраняются применением фазного ротора, но применение такого ротора значительно удорожает двигатель и требует пускового реостата.
Типы асинхронных электродвигателей
Основной тип асинхронных машин — трехфазный асинхронный двигатель . Он имеет три обмотки на статоре, смещенные в пространстве на 120°. Обмотки соединяются в звезду или треугольник и питаются трехфазным переменным током.
Двигатели малой мощности в большинстве случаев выполняются как двухфазные . В отличие от трехфазных двигателей они имеют на статоре две обмотки, токи в которых для создания вращающегося магнитного поля должны быть сдвинуты на угол π /2.
Если токи в обмотках равны по модулю и сдвинуты по фазе на 90°, то работа подобного двигателя ничем не будет отличаться от работы трехфазного. Однако такие двигатели с двумя обмотками на статоре в большинстве случаев питаются от однофазной сети и сдвиг, приближающийся к 90°, создается искусственным путем, обычно за счет конденсаторов.
Однофазный двигатель , имеющий только одну обмотку на статоре, практически неработоспособен. При неподвижном роторе в двигателе создается только пульсирующее магнитное поле и вращающий момент равен нулю. Правда, если ротор такой машины раскрутить до некоторой скорости, то далее она может выполнять функции двигателя.
В этом случае, хотя и будет только пульсирующее поле, но оно слагается из двух симметричных — прямого и обратного, которые создают неравные моменты — больший двигательный и меньший тормозной, возникающий за счет токов ротора повышенной частоты (скольжение относительно обратносинхронного поля больше 1).
В связи с изложенным однофазные двигатели снабжаются второй обмоткой, которая используется как пусковая. В цепь этой обмотки для создания фазового сдвига тока включают конденсаторы, емкость которых может быть достаточно велика (десятки микрофарад при мощности двигателя менее 1 кВт).
В системах управления используются двухфазные двигатели, которые иногда называют исполнительными . Они имеют две обмотки на статоре, сдвинутые в пространстве на 90°. Одна из обмоток, называемая обмоткой возбуждения, непосредственно подключается к сети 50 или 400 Гц. Вторая используется как обмотка управления.
Для создания вращающегося магнитного поля и соответствующего момента ток в обмотке управления должен быть сдвинут на угол, близкий к 90°. Регулирование скорости двигателя, как будет показано ниже, осуществляется изменением значения или фазы тока в этой обмотке. Реверс обеспечивается изменением фазы тока в управляющей обмотке на 180° (переключением обмотки).
Двухфазные двигатели изготовляются в нескольких исполнениях:
с короткозамкнутым ротором,
с полым немагнитным ротором,
с полым магнитным ротором.
Преобразование вращательного движения двигателя в поступательное движение органов рабочей машины всегда связано с необходимостью использования каких-либо механических узлов: зубчатых реек, винта и др. Поэтому иногда целесообразно выполнение двигателя с линейным перемещением ротора-бегунка (название ’’ротор” при этом может быть принято только условно — как движущегося органа).
В этом случае двигатель, как говорят, может быть развернут. Обмотка статора линейного двигателя выполняется так же, как и у объемного двигателя, но только должна быть заложена в пазы на всю длину максимального возможного перемещения ротора-бегунка. Ротор-бегунок обычно короткозамкнутый, с ним сочленяется рабочий орган механизма. На концах статора, естественно, должны находиться ограничители, препятствующие уходу ротора за рабочие пределы пути.
Принцип работы частотного преобразователя. Схема частотного привода.
Переити в каталог продукции: Частотные преобразователи
Электроприводы постоянного тока являются очень простыми с точки зрения организации системы регулирования скорости вращения двигателя, но сам электродвигатель является слабым звеном системы, ведь он достаточно дорогой и при этом не отличается особой надежностью. К тому же область применения данных двигателей ограничена из-за излишнего искрения щеток и, следовательно, повышенной электроэрозии и износа коллектора, что к общем не позволяет использовать двигатели постоянного тока в пыльных условиях и в средах с опасностью взрыва. Альтернативой электроприводам постоянного тока является комплексное применение асинхронных двигателей переменного тока с частотными преобразователями.
Асинхронные двигатели повсеместно используются в виду очень простого устройства и надежности, при меньших габаритах и массе они обеспечивают такую же мощность, как и двигатели постоянного тока. Главным минусом их является сложность организации системы регулирования скорости двигателя традиционными для двигателей постоянного тока методами. Теоретическая база для разработки первых частотных преобразователей, которые могли уже тогда стать решением вопроса регуляции скорости, была заложена еще в 30-е годы двадцатого века. Отсутствие микропроцессоров и транзисторов не позволяло воплотить теорию в практику, но с появлением транзисторных схем и управляющих микропроцессоров в Японии, США и Европе примерно в одно время были разработаны варианты частотных преобразователей.
При наличии других способов управления скорости вращения исполняющих механизмов (речь идет о механических вариаторах, резисторных группах, вводимыми в ротор/статор, электромеханических частотных преобразователях, гидравлике) наиболее эффективным является использование статических частотных преобразователей, который экономическим выгоднее других вариантов в виду дешевизны монтажа, эксплуатации и высокого КПД. Неприхотливость преобразователей также обусловлена отсутствием подвижных частей в виду того, что регуляция осуществляется на этапе подачи тока и основана на изменении параметров питания, а не на контроле за скоростью вращения при помощи средств механического управления.
Каков принцип частотных методов регулирования? Наглядное объяснение можно вывести из следующей формулы
Из выражения видно, что путем изменения частоты входного питающего напряжения (f1) изменяется угловая скорость статора, точнее его магнитного поля, но этом взаимозависимые характеристики. Эффект достигается при постоянном числе пар полюсов (p). Что это дает? В первую очередь, плавность регулирования (в особенности при пиковых нагрузках в момент пуска двигателя) скорости при очень высокой жесткости механических характеристик. Также достигается повышенное скольжение асинхронного двигателя, что существенно снижает потери мощности и увеличивает коэффициент полезного действия.
Высокие показатели КПД, коэффициента мощности, перегрузочной способности достигаются при одновременном изменении частоты и напряжения. Законы изменения этих параметров напрямую зависят от момента нагрузки, который может иметь статичный, вентиляторный и обратно пропорциональный скорости вращения характер.
При постоянном моменте нагрузке напряжение на статоре будет регулироваться в пропорциональной зависимости от частоты, что хорошо видно из формулы:
Если момент нагрузки имеет вентиляторный характер, то напряжение будет пропорционально квадрату частоты питающего напряжения.
Ну и моменте нагрузки, который обратно пропорционален скорости получим:
Как видно из вышеописанного при обеспечении одновременного регулирования частоты питающего напряжения и параметров напряжения на статоре частотным преобразователем достигается плавное бесступенчатое регулирование скорости вращения вала двигателя. При этом отсутствие передач позволяет более точно регулировать скорость вращения по заданным пользователем параметрам.
Основные достоинства применения регулируемых приводов на предприятиях.
Интеграция систем регулирования качественно изменяет технические характеристики всех участников технологического процесса, нуждающегося в регуляции. Большая часть экономической эффективности заключается в возможности регулирования при помощи частотного преобразователя технологических характеристик процессов, температуры, давления, скорости движения, скорости подачи главного движения. Конечно же, максимальная эффективность достигается на объектах, предназначенных для перемещения жидких масс. До сих пор популярным способом регулирования скорости потока и мощности является применение заслонок и заглушек, в частных случаях различных регулирующих механических клапанов, но эти методы менее эффективны чем изменение скорости самого исполнительного механизма и чреваты потерями транспортируемой жидкости.
Разница в производительности и эффективности между дросселированием посредством механических средств и применением частотных преобразователей очевидна на следующем рисунке. (схема 1) Из схемы становится ясно, что возрастает экономия ресурсов, а также нивелируются проблемы, связанные с полной потерей динамической мощности потока во время закрытия заслонок, что приводит, по сути, к холостой работе двигателя. Это увеличивает экономическую эффективность частотных преобразователей.
Конструкция типового частотного преобразователя.
Принципиальной задачей преобразователя частоты является изменение параметров электрического тока, это осуществляется при помощи транзисторного выпрямления тока и преобразования его до необходимых заданных значений. Типовой частотный преобразователь состоит из трех частей:
— Звено постоянного тока. Состоит из выпрямителя и фильтрационных устройств. Звено постоянного тока принимает входной сигнал и перенаправляет его в инвертор.
— Импульсного инвертора. Силовой трехфазный инвертор обычно имеет шесть транзисторов-ключей и осуществляет преобразование тока до заданных частот и амплитуд, а затем подает его на статор. Инвертор может состоять из тиристорной схемы.
— Микропроцессорной системы управления. Управляет системами преобразования и защиты преобразователя.
Четкая синусоида выходного сигнала – результат работы IGBT-транзисторов в качестве ключей инвертора, которые работают с более высокой частотой переключения, чем устаревшие тиристоры.
Как работает частотный преобразователь?
Схема преобразователя представлена в наглядном виде на следующем рисунке. (схема 2)
На схеме отображены основные структурные части преобразователя, а именно: инвертор, диодный силовой выпрямитель, модуль управления широтно-импульсной модуляцией, система управления, дроссель и конденсатор фильтра. Регуляция выходной частоты и напряжения (fвых. и Uвых., соответственно) осуществляется путем широтно-импульсного управления высокой частоты. Управление зависит от периодичности модуляции. Это период, в течение которого статор по очереди получает сигнал от положительного и отрицательного полюса напряжения. Длительность периода модулируется согласно синусоидальному закону гармонических частот, дополнительное преобразование происходит уже в обмотках двигателя, где после фильтрации ток имеет уже строго синусоидальную форму.
Сама кривая выходного напряжения – это двуполярная последовательность высокой частоты, созданная прямоугольными импульсами. Данные параметры также регулируются широтно-импульсной модуляцией, а сама ширина импульсов модулируется по синусоидальному закону. Изменение характеристик выходного напряжения осуществляется одним из двух способов: изменение AP (амплитуды) путем регуляции значения входного напряжения Uвх.; при Uвх., имеющим постоянное значение, путем внесения изменений в программу, контролирующую периодичность переключения переключателей V1-V6. Наличие современных IBGT-транзисторов на микропроцессорном управлении применение второго способа является более продуктивным и широко используемым. ШИМ также позволяет добиться формы кривой тока близкой к синусоиде, но уже благодаря свойствам обмоток, выполняющих функции фильтра.
Данный метод управления также позволяет существенно увеличить коэффициент полезного действия преобразователя и по своим характеристикам полностью аналогично методике управления путем изменения амплитуды и частоты тока. В наше время существует несколько компоновок инверторов с управляемыми ключами: запираемые GTO тиристоры; биполярные IGBT-транзисторные ключи с затвором. С примером можно ознакомиться на следующем рисунке. (рисунок 2) Здесь изображена мостовая трехфазная схема с использованием IGBT-транзисторов. Инвертор автономный. В данной схеме используется комплекс из 6 транзисторных ключей (на схеме V1-V6), емкостного фильтра тока. Транзисторы включены при помощи диодов обратного тока (на схеме D1-D6) по встречно-параллельной схеме.
Алгоритм переключения вентилей задается микропроцессором, переключение преобразует постоянное Uвх. в переменное выходное напряжение с прямоугольными импульсами. Активная составляющая токового потока асинхронного двигателя проходит через транзисторы, а реактивная – через диоды обратного тока.
И – трехфазный мостовой инвертор;
В – трехфазный мостовой выпрямитель;
Сф – конденсатор фильтра;
Переити в каталог продукции: Частотные преобразователи
Бесколлекторный двигатель постоянного тока: особенности и принцип работы
Как работает бесколлекторный двигатель?Бесколлекторный двигатель постоянного тока имеет на статоре трёхфазную обмотку, и постоянный магнит на роторе. Вращающееся магнитное поле создаётся обмоткой статора, при взаимодействии с которым магнитный ротор приходит в движение. Для создания вращающегося магнитного поля на обмотку статора подаётся система трёхфазных напряжений, которая может иметь различную форму и формируется различными способами. Формирование питающих напряжений (коммутация обмоток) для бесколлекторного двигателя постоянного тока производиться специализированными блоками электроники – контроллером двигателя.
Заказать бесколлекторный двигатель в нашем каталоге
В простейшем случае обмотки попарно подключаются к источнику постоянного напряжения и по мере того как ротор поворачивается в направлении вектора магнитного поля обмотки статора производится подключение напряжения к другой паре обмоток. Вектор магнитного поля статора при этом занимает другое положение и вращение ротора продолжается. Для определения нужного момента подключения следующих обмоток используется датчик положения ротора, чаще других используются датчики Холла.
Возможные варианты и специальные случаи
Выпускаемые сейчас бесколлекторные двигатели могут иметь самую разную конструкцию.
По исполнению статорной обмотки можно выделить двигатели с классической обмоткой, намотанной на стальной сердечник, и двигатели с полой цилиндрической обмоткой без стального сердечника. Классическая обмотка обладает значительно большей индуктивностью, чем полая цилиндрическая обмотка, и соответственно большей постоянной времени. Из-за этого с одной стороны, полая цилиндрическая обмотка допускает более динамичное изменение тока (а, следовательно, и момента), с другой стороны при работе от контроллера двигателя, использующего ШИМ-модуляцию невысокой частоты для сглаживания пульсаций тока, требуются фильтрующие дроссели большего номинала (а соответственно и большего размера). Кроме того, классическая обмотка, как правило, имеет заметно больший момент магнитной фиксации, а также меньший КПД, чем полая цилиндрическая обмотка.
Ещё одно отличие, по которому разделяются различные модели двигателей – это взаимное расположение ротора и статора – существуют двигатели с внутренним ротором и двигатели с внешним ротором. Двигатели с внутренним ротором, как правило, имеют более высокие скорости и меньший момент инерции ротора, чем модели с внешним ротором. Благодаря этому двигатели с внутренним ротором имеют более высокую динамику. Двигатели с внешним ротором часто имеют несколько больший номинальный момент при том же наружном диаметре двигателя.
Отличия от других типов двигателей
Отличия от коллекторных ДПТ. Размещение обмотки на роторе позволило отказаться от щёток и коллектора и избавиться тем самым от подвижного электрического контакта, который значительно снижает надёжность ДПТ с постоянными магнитами. По этой же причине скорость у бесколлекторных двигателей, как правило, значительно выше, чем у ДПТ с постоянными магнитами. С одной стороны это позволяет увеличить удельную мощность бесколлекторного двигателя, с другой стороны не для всех применений такая высокая скорость является действительно необходимой
Отличия от синхронных двигателей с постоянными магнитами. Синхронные двигатели с постоянными магнитами на роторе очень похожи на бесколлекторные ДПТ по конструкции, однако есть и ряд различий. Во-первых термин синхронный двигатель объединяет в себе много различных видов двигателей, часть из которых предназначены для непосредственной работы от стандартной сети переменного тока, другая часть (например синхронные серводвигатели) может работать только от преобразователей частоты (контроллеров двигателей). Бесколлекторные двигатели, хотя и имеют на статоре трёхфазную обмотку, не допускают непосредственную работу от сетевого напряжения, и обязательно требуют наличия соответствующего контроллера. Кроме того синхронные двигатели предполагают питание напряжением синусоидальной формы в то время как бесколлекторные двигатели допускают питание переменным напряжением ступенчатой формы (блочная коммутация) и даже предполагают его использование в номинальных режимах работы.
Когда нужен бесколлекторный двигатель?
Ответ на этот вопрос достаточно прост – в тех случаях, когда он имеет преимущество перед остальными типами двигателей. Так, например, практически невозможно обойтись без бесколлекторного двигателя в применениях, где требуются большие скорости вращения: свыше 10000 об/мин. Оправдано применение бесколлекторных двигателей также и в тех случаях, когда требуется высокий срок службы двигателя. В тех случаях, когда требуется применять сборку из двигателя с редуктором, однозначно оправдано применение низкоскоростных бесколлекторных двигателей (с большим числом полюсов). Высокоскоростные бесколлекторные двигатели в этом случае будут иметь скорость выше, чем предельно допустимая скорость редуктора, и по этой причине не будет возможности использовать их мощность полностью. Для применений, где требуется максимально простое управление двигателем (без использования контроллера двигателя) естественным выбором будет коллекторный ДПТ.
С другой стороны, в условиях повышенной температуры или повышенной радиации проявляется слабое место бесколлекторных двигателей – датчики Холла. Стандартные модели датчиков Холла имеют ограниченную стойкость к радиации и диапазон рабочих температур. Если в подобном применении всё же имеется необходимость использовать бесколлекторный двигатель, то неизбежными становятся заказные исполнения с заменой датчиков Холла на более стойкие к указанным факторам, что увеличивает цену двигателя и сроки поставки.
Принцип работы асинхронного двигателя
Двигатель, работающий по принципу электромагнитной индукции , известен как асинхронный двигатель. Электромагнитная индукция — это явление, при котором электродвижущая сила индуцирует электрический проводник, когда он находится во вращающемся магнитном поле.
Статор и ротор — две важные части двигателя. Статор является неподвижной частью, и он несет перекрывающиеся обмотки, в то время как ротор несет основную обмотку или обмотку возбуждения.Обмотки статора равномерно смещены друг от друга на угол 120 °.
Асинхронный двигатель — это двигатель с одним возбуждением, то есть питание подается только на одну часть, то есть на статор . Термин «возбуждение» означает процесс создания магнитного поля на частях двигателя.
Когда на статор подается трехфазное питание, на нем создается вращающееся магнитное поле. На рисунке ниже показано вращающееся магнитное поле, созданное в статоре:
Считайте, что вращающееся магнитное поле индуцирует против часовой стрелки.Вращающееся магнитное поле имеет подвижные полярности. Полярность магнитного поля меняется в зависимости от положительного и отрицательного полупериода питания. Изменение полярности заставляет магнитное поле вращаться.
Проводники ротора неподвижны. Этот неподвижный проводник отсекает вращающееся магнитное поле статора, и из-за электромагнитной индукции в роторе индуцируется ЭДС. Эта ЭДС известна как ЭДС, индуцированная ротором, и возникает из-за явления электромагнитной индукции.
Проводники ротора закорачиваются либо концевыми кольцами, либо с помощью внешнего сопротивления. Относительное движение между вращающимся магнитным полем и проводником ротора индуцирует ток в проводниках ротора. Когда ток течет по проводнику, на нем наводится магнитный поток. Направление потока ротора такое же, как и направление тока ротора.
Теперь у нас есть два потока: один из-за ротора, а другой из-за статора. Эти потоки взаимодействуют друг с другом.На одном конце проводника потоки нейтрализуют друг друга, а на другом конце плотность потока очень высока. Таким образом, поток высокой плотности пытается подтолкнуть проводник ротора к области потока низкой плотности. Это явление вызывает крутящий момент на проводнике, и этот крутящий момент известен как электромагнитный крутящий момент.
Направление электромагнитного момента и вращающегося магнитного поля одинаковы. Таким образом, ротор начинает вращаться в том же направлении, что и вращающееся магнитное поле.
Скорость ротора всегда меньше вращающегося магнитного поля или синхронной скорости. Ротор пытается вращаться со скоростью ротора, но всегда ускользает. Таким образом, двигатель никогда не работает со скоростью вращающегося магнитного поля, и по этой причине асинхронный двигатель также известен как асинхронный двигатель.
Почему ротор никогда не работает с синхронной скоростью?
Если скорость ротора равна синхронной скорости, относительного движения между вращающимся магнитным полем статора и проводниками ротора не происходит.Таким образом, на проводнике не наводится ЭДС, и в нем возникает нулевой ток. Без тока крутящий момент также не создается.
По вышеуказанным причинам ротор никогда не вращается с синхронной скоростью. Скорость ротора всегда меньше скорости вращающегося магнитного поля.
В качестве альтернативы принцип работы асинхронного двигателя можно также объяснить следующим образом.
Давайте разберемся в этом, рассмотрев единственный проводник на неподвижном роторе.Этот проводник рассекает вращающееся магнитное поле статора. Учтите, что вращающееся магнитное поле вращается по часовой стрелке. Согласно закону электромагнитной индукции Фарадея, в проводнике индуцируется ЭДС.
Когда цепь ротора замыкается внешним сопротивлением или концевым кольцом, ротор индуцирует ЭДС, которая вызывает ток в цепи. Направление индукционного тока ротора противоположно направлению вращающегося магнитного поля. Ток ротора индуцирует магнитный поток в роторе.Направление потока ротора такое же, как и у тока.
Взаимодействие потоков ротора и статора создает силу, которая действует на проводники ротора. Сила действует тангенциально на ротор и, следовательно, вызывает крутящий момент. Крутящий момент толкает проводники ротора, и, таким образом, ротор начинает двигаться в направлении вращающегося магнитного поля. Ротор начинает движение без какой-либо дополнительной системы возбуждения, поэтому двигатель называется самозапускающимся двигателем .
Работа двигателя зависит от напряжения, наведенного на ротор, поэтому его называют асинхронным двигателем .
Принцип работы и типы асинхронного двигателя
Асинхронные двигатели — наиболее часто используемые двигатели во многих сферах применения. Их также называют асинхронными двигателями , потому что асинхронный двигатель всегда работает со скоростью ниже синхронной. Синхронная скорость означает скорость вращающегося магнитного поля в статоре.В основном существует 2 типов асинхронных двигателей в зависимости от типа входного источника питания — (i) однофазный асинхронный двигатель и (ii) трехфазный асинхронный двигатель.
Или их можно разделить по типу ротора — (i) двигатель с короткозамкнутым ротором и (ii) двигатель с контактным кольцом или тип
.Основной принцип работы асинхронного двигателя
В двигателе постоянного тока необходимо подавать питание как на обмотку статора, так и на обмотку ротора. Но в асинхронном двигателе только обмотка статора питается переменным током.- Из-за источника переменного тока вокруг обмотки статора образуется переменный поток. Этот переменный поток вращается с синхронной скоростью. Вращающийся поток называется «вращающимся магнитным полем» (RMF).
- Относительная скорость между RMF статора и проводниками ротора вызывает индуцированную ЭДС в проводниках ротора в соответствии с законом электромагнитной индукции Фарадея. Проводники ротора закорочены, и, следовательно, ток ротора возникает из-за наведенной ЭДС. Поэтому такие двигатели называются асинхронными двигателями . (Это действие аналогично тому, что происходит в трансформаторах, поэтому асинхронные двигатели могут называться вращающимися трансформаторами .)
- Теперь индуцированный ток в роторе также будет создавать вокруг него переменный поток. Этот поток ротора отстает от потока статора. Направление индуцированного тока ротора, согласно закону Ленца, таково, что он будет иметь тенденцию противодействовать причине его возникновения.
- Поскольку причиной возникновения тока ротора является относительная скорость между магнитным потоком вращающегося статора и ротором, ротор будет пытаться догнать RMF статора.Таким образом, ротор вращается в том же направлении, что и поток статора, чтобы минимизировать относительную скорость. Однако ротору никогда не удается догнать синхронную скорость. Это основной принцип работы асинхронного двигателя любого типа, однофазный трехфазный.
Синхронная скорость:
где, f = частота подачи
P = количество полюсов
Скольжение:
Ротор пытается догнать синхронную скорость поля статора, и, следовательно, он вращается.Но на практике ротор никогда не догоняет. Если ротор достигает скорости статора, не будет относительной скорости между потоком статора и ротором, следовательно, не будет индуцированного тока ротора и создания крутящего момента для поддержания вращения. Однако это не остановит двигатель, ротор замедлится из-за потери крутящего момента, крутящий момент снова будет действовать из-за относительной скорости. Вот почему ротор вращается со скоростью, которая всегда меньше синхронной скорости.
Разница между синхронной скоростью (N s ) и фактической скоростью (N) ротора называется скольжением.▷ Синхронные и асинхронные двигатели — где их использовать?
Многие люди часто путаются с терминами «синхронные» и «асинхронные двигатели» и с их областями применения. Именно поэтому один из новейших членов сообщества электротехники написал эту статью. Проверьте это ниже:
Следующая информация касается общих принципов работы синхронных и асинхронных двигателей, их преимуществ, а также где они обычно используются и чего можно достичь с помощью каждого из этих двигателей.
Давайте сначала сконцентрируемся на их принципах работы…
Синхронные и асинхронные двигатели — принципы работы
Синхронные двигатели
Это типичный электродвигатель переменного тока, способный развивать синхронную скорость. В этих двигателях и статор, и ротор вращаются с одинаковой скоростью, что обеспечивает синхронизацию. Основной принцип работы заключается в том, что когда двигатель подключен к сети, электричество течет в обмотки статора, создавая вращающееся электромагнитное поле.Это, в свою очередь, индуцируется на обмотках ротора, который затем начинает вращаться.
Требуется внешний источник постоянного тока, чтобы синхронизировать направление и положение вращения ротора с направлением вращения статора. В результате такой блокировки двигатель либо должен работать синхронно, либо не вращаться совсем.
Асинхронные двигатели
Принцип работы асинхронных двигателей почти такой же, как и у синхронных двигателей, за исключением того, что к ним не подключен внешний возбудитель.Проще говоря, асинхронные двигатели, также известные как асинхронные двигатели, также работают по принципу электромагнитной индукции, в которых ротор не получает никакой электроэнергии за счет теплопроводности, как в случае двигателей постоянного тока.
Единственная загвоздка в том, что в асинхронных двигателях нет внешнего устройства, подключенного для возбуждения ротора, и, следовательно, скорость ротора зависит от переменной магнитной индукции. Это изменяющееся электромагнитное поле заставляет ротор вращаться со скоростью, меньшей, чем скорость магнитного поля статора.Поскольку скорость ротора и скорость магнитного поля статора меняются, эти двигатели известны как асинхронные двигатели. Разница в скорости известна как «проскальзывание».
Синхронные и асинхронные двигатели — преимущества и недостатки
- Синхронный двигатель работает с постоянной скоростью и заданной частотой независимо от нагрузки. Но скорость асинхронного двигателя уменьшается с увеличением нагрузки.
- Синхронный двигатель может работать в широком диапазоне коэффициентов мощности, как с запаздыванием, так и с опережением, тогда как асинхронный двигатель всегда работает с запаздыванием p.f, который может быть очень низким при уменьшении нагрузок.
- Синхронный двигатель не запускается автоматически, тогда как асинхронный двигатель может запускаться самостоятельно.
- На крутящий момент синхронного двигателя не влияют изменения приложенного напряжения, как на асинхронный двигатель.
- Для запуска синхронного двигателя требуется внешнее возбуждение постоянного тока, но асинхронный двигатель не требует внешнего возбуждения для работы.
- Синхронные двигатели обычно дороги и сложны по сравнению с асинхронными двигателями, которые менее дороги и удобны для пользователя.
- Синхронные двигатели особенно хороши для низкоскоростных приводов (ниже 300 об / мин), потому что их коэффициент мощности всегда можно отрегулировать до 1,0, и они очень эффективны. С другой стороны, асинхронные двигатели отлично подходят для скоростей выше 600 об / мин.
- В отличие от асинхронных двигателей, синхронные двигатели могут работать на сверхнизких скоростях за счет использования мощных электронных преобразователей, которые генерируют очень низкие частоты. Их можно использовать для привода дробилок, вращающихся печей и шаровых мельниц с регулируемой скоростью.
Синхронные и асинхронные двигатели — применение
Приложения для синхронных двигателей
- Они обычно используются на электростанциях для достижения соответствующего коэффициента мощности. Они работают параллельно шинам и часто перегружаются извне для достижения желаемого коэффициента мощности.
- Они также используются в обрабатывающей промышленности, где используется большое количество асинхронных двигателей и трансформаторов для преодоления запаздывающей p.f.
- Используется на электростанциях для выработки электроэнергии с заданной частотой.
- Используется для управления напряжением путем изменения его возбуждения в линиях передачи.
Применение асинхронных двигателей
Более 90% двигателей, используемых в мире, являются асинхронными двигателями, и они находят широкое применение в самых разных областях. Некоторые из них:
- Центробежные вентиляторы, нагнетатели и насосы
- Компрессоры
- Конвейеры
- Подъемники, а также краны большой грузоподъемности
- Станки токарные
- Масляные, текстильные, бумажные комбинаты и т. Д.
Заключение
В заключение, синхронные двигатели используются только тогда, когда от машины требуются характеристики низкой или сверхнизкой скорости, а также при желаемых коэффициентах мощности (как отстающих, так и опережающих). В то время как асинхронные двигатели преимущественно используются в большинстве вращающихся или движущихся машин, таких как вентиляторы, подъемники, шлифовальные машины и т. Д.
Что вы думаете об этой статье? Вам это помогло?
Принцип работы однофазного асинхронного двигателя
Производство вращающегося поля
Рассмотрим две обмотки «A» и «B», смещенные таким образом, что они создают магнитное поле на 90 ° друг от друга в пространстве.Результатом этих двух полей является вращающееся магнитное поле постоянной величины & phiv; м . Неоднородное магнитное поле создает неоднородный крутящий момент, который делает работу двигателя шумной и влияет на пусковой крутящий момент.
Рисунок: Создание однородного магнитного поля.
Принцип пуска
Однофазный асинхронный двигатель состоит из однофазной обмотки на статоре и клеточной обмотки на роторе. Когда к обмотке статора подключен однофазный источник питания, создается пульсирующее магнитное поле.В пульсирующем поле ротор не вращается по инерции. Следовательно, однофазный асинхронный двигатель не запускается автоматически и требует определенных средств запуска. Были предложены две теории для определения характеристик однофазного асинхронного двигателя.
- Теория двойного вращающегося поля.
- Теория кросс-поля.
Теория двойного вращающегося поля
Эта теория для однофазной системы утверждает, что стационарное пульсирующее магнитное поле может быть разделено на два RMF, каждая из которых имеет одинаковую величину, но вращается в противоположном направлении.
Асинхронная машина реагирует на каждое магнитное поле отдельно, и чистый крутящий момент в двигателе равен некоторой части крутящего момента, создаваемого каждым из двух магнитных полей.
Уравнение переменного магнитного поля, ось которого зафиксирована в пространстве:
β max — максимальное значение плотности потока синусоидально распределенного воздушного зазора. «B» представляет уравнение вращающегося поля, движущегося в положительном направлении α, а «A» представляет уравнение вращающегося поля, движущегося в положительном направлении.Поле, движущееся в положительном направлении α, называется полем, вращающимся вперед, а в направлении отрицательного α — полем, вращающимся назад.
Таким образом, делается вывод, что стационарное пульсирующее магнитное поле может быть разрешено за счет двух вращающихся магнитных полей, оба одинаковой величины и движущихся с синхронной скоростью в противоположном направлении с той же частотой, что и стационарное магнитное поле.
Теория, основанная на таком разрешении переменного поля на два поля, вращающихся в противоположных направлениях, называется теорией поля Double Revolving однофазной индукционной машины.
Как работает асинхронный двигатель?
26 сентября, 2019
Изобретение асинхронных двигателей навсегда изменило ход человеческой цивилизации. Этот двигатель столетней давности, изобретенный великим ученым Николой Тесла, является наиболее распространенным типом двигателей даже сегодня. Фактически, около 50 процентов мирового потребления электроэнергии приходится на асинхронные двигатели. Давайте перейдем к работе асинхронных двигателей или, точнее, к гениальному мышлению Николы Теслы.
Детали асинхронного двигателя
Асинхронный двигатель состоит из 2 основных частей; Статор и ротор (рис: 1). Статор — это неподвижная часть, а ротор — это вращающаяся часть. Статор в основном представляет собой трехкатушечную обмотку, на которую подается трехфазный переменный ток. Ротор находится внутри статора. Между ротором и статором будет небольшой зазор, известный как воздушный зазор. Величина радиального зазора может варьироваться от 0,5 до 2 мм.
Рис. 1 Статор и ротор асинхронного двигателяДетали конструкции статора
Статор изготавливается путем укладки тонких высокопроницаемых стальных пластин с прорезями внутри стального или чугунного каркаса.Расположение стальных пластин внутри рамы показано на следующем рисунке. Здесь показаны только некоторые из стальных пластин. Обмотка проходит через пазы статора.
Рис. 2 Детали конструкции статораВлияние трехфазного тока, проходящего через обмотку статора
Когда через обмотку проходит трехфазный переменный ток, происходит кое-что очень интересное. Он создает вращающееся магнитное поле (RMF). Как показано на рисунке ниже, создается магнитное поле, которое по своей природе вращается.RMF — важное понятие в электрических машинах. Мы увидим, как это происходит, в следующем разделе.
Рис. 3 Вращающееся магнитное поле создается в асинхронном двигателеКонцепция вращающегося магнитного поля (RMF)
Чтобы понять явление вращающегося магнитного поля, гораздо лучше рассмотреть упрощенную трехфазную обмотку всего с тремя катушками. Провод, по которому проходит ток, создает вокруг себя магнитное поле. Теперь для этого специального устройства магнитное поле, создаваемое 3 фазами A.Ток C будет таким, как показано в конкретный момент.
Рис. 4 Магнитное поле создается вокруг одиночного провода и упрощенной обмоткиКомпоненты переменного тока изменяются со временем. Еще два случая показаны на следующем рисунке, где из-за изменения переменного тока магнитное поле также изменяется. Понятно, что магнитное поле просто принимает другую ориентацию, но его величина остается прежней. Из этих трех положений ясно, что это похоже на вращающееся магнитное поле однородной силы.Скорость вращения магнитного поля называется синхронной скоростью.
Рисунок 5A Трехфазный переменный ток Рисунок 5B Здесь проиллюстрирована концепция вращающегося магнитного поляВлияние RMF на замкнутый проводник
Предположим, вы помещаете замкнутый проводник внутрь такого вращающегося магнитного поля. Поскольку магнитное поле колеблется, в контуре будет индуцироваться ЭДС в соответствии с законом Фарадея. E.M.F будет производить ток через петлю. Таким образом, ситуация стала такой, как если бы петля с током находилась в магнитном поле.Это создаст магнитную силу в петле в соответствии с законом Лоренца. Таким образом, петля начнет вращаться, это ясно показано на рис. 6.
Рис. 6 Влияние RMF на замкнутый проводникРабота асинхронного двигателя
Подобное явление также происходит внутри асинхронного двигателя. Здесь вместо простой петли используется что-то очень похожее на беличью клетку. Беличья клетка имеет стержни, которые закорочены концевыми кольцами.
Трехфазный переменный ток, проходящий через обмотку статора, создает вращающееся магнитное поле.Как и в предыдущем случае, ток будет индуцирован в стержнях беличьей клетки, и она начнет вращаться. Вы можете заметить изменение наведенного тока в стержнях с короткозамкнутым ротором. Это связано со скоростью изменения магнитного потока в одной паре беличьих стержней, которая отличается от другой из-за ее разной ориентации. Это изменение тока на шкале со временем будет меняться.
Рис. 7 RMF создает крутящий момент на роторе, как в случае с простой обмоткой. Вот почему используется название асинхронный двигатель, электричество индуцируется в роторе за счет магнитной индукции, а не прямого электрического соединения.Чтобы способствовать такой электромагнитной индукции, внутри ротора установлена пластина с изолированным железным сердечником.
Рис. 8 Тонкие слои железной пластины, которые упакованы в ротор Такие маленькие кусочки слоев железа обеспечивают минимальные потери на вихревые токи. Вы можете отметить одно большое преимущество трехфазных асинхронных двигателей, так как они по своей сути самозапускаются.
Также можно заметить, что стержни беличьей клетки наклонены к оси вращения или имеют перекос. Это необходимо для предотвращения колебаний крутящего момента.Если бы стержни были прямыми, был бы небольшой промежуток времени для передачи крутящего момента в паре стержней ротора на следующую пару. Это вызовет колебания крутящего момента и вибрацию ротора. Обеспечивая перекос в стержнях ротора, прежде чем ослабнет крутящий момент в одной паре стержней, в действие вступит следующая пара. Таким образом предотвращается колебание крутящего момента.
Скорость вращения ротора и концепция скольжения
Здесь вы можете заметить, что и магнитное поле, и ротор вращаются.Но с какой скоростью будет вращаться ротор? Чтобы получить ответ на этот вопрос, рассмотрим разные случаи.
Рассмотрим случай, когда скорость ротора совпадает со скоростью магнитного поля. Ротор испытывает магнитное поле в относительной системе отсчета. Поскольку и магнитное поле, и ротор вращаются с одинаковой скоростью относительно ротора, магнитное поле является стационарным. Ротор будет находиться в постоянном магнитном поле, поэтому наведенных ЭДС и тока не будет. Это означает нулевое усилие на стержнях ротора, поэтому ротор будет постепенно замедляться.Но по мере замедления петли ротора будут испытывать переменное магнитное поле, поэтому индуцированный ток и сила снова возрастут, и ротор будет ускоряться. Короче говоря, ротор никогда не сможет догнать скорость магнитного поля. Он вращается с определенной скоростью, которая немного меньше синхронной скорости. Разница в синхронной скорости и скорости ротора называется скольжением.
N
РОТОРSLIP = (N
S — N R ) / N SЗНАЧЕНИЕ СКОЛЬЖЕНИЯ = 2-6%
Рис. 9 Здесь проиллюстрирована концепция скольженияПередача энергии в двигателе
Вращательная механическая сила, полученная от ротора, передается через приводной вал.Короче говоря, в асинхронном двигателе электрическая энергия поступает через статор и выводится из двигателя, а механическое вращение передается от ротора.
Рис. 10 Передача мощности в двигателеНо между входом и выходом мощности будут многочисленные потери энергии, связанные с двигателем. К различным компонентам этих потерь относятся потери на трение, потери в меди, потери на вихревые токи и гистерезисные потери. Такие потери энергии во время работы двигателя рассеиваются в виде тепла, поэтому вентилятор на другом конце помогает охлаждать двигатель.
Рис. 11 Охлаждающий вентилятор используется для отвода тепла, выделяемого двигателемПочему асинхронные двигатели так популярны?
Теперь давайте поймем, почему асинхронные двигатели правят как в промышленном, так и в бытовом мире. Вы можете отметить, что асинхронные двигатели не требуют постоянного магнита. У них даже нет щеток, колец коммутатора или датчика положения, как у других аналогов электрических машин. Асинхронные двигатели также запускаются самостоятельно. Наиболее важным преимуществом является то, что скорость асинхронного двигателя можно легко контролировать, регулируя входную частоту питания.
Чтобы понять это правильно, давайте еще раз рассмотрим простую схему расположения катушек. Мы узнали, что вращающееся магнитное поле создается из-за трехфазной входной мощности. Совершенно ясно, что скорость RMF пропорциональна частоте входной мощности. Поскольку ротор всегда пытается догнать RMF, скорость ротора также пропорциональна частоте мощности переменного тока.
N
S ∝ fТаким образом, используя частотно-регулируемый привод, можно очень легко управлять скоростью асинхронного двигателя.Это свойство асинхронных двигателей делает их привлекательным выбором для лифтов, кранов и электромобилей. Благодаря высокоскоростному диапазону асинхронных двигателей электромобили могут работать с односкоростной коробкой передач.
Рис.12 Односкоростная коробка передач Рис. 13 Контуры КПД асинхронного двигателяЕще одно интересное свойство асинхронного двигателя состоит в том, что когда ротор приводится в движение первичным двигателем, он также может действовать как генератор. В этом случае вы должны убедиться, что скорость RMF всегда меньше скорости ротора.
Рис. 14 Скорость RMF всегда меньше скорости ротораМы полагаем, что теперь вы получили четкое представление о гениальных принципах работы асинхронного двигателя, а также о том, почему он по-прежнему доминирует в бытовом и промышленном мире.
ОБ АВТОРЕ
Сабин Мэтью, аспирант ИИТ Дели по специальности машиностроение. Основатель Lesics Engineers Pvt Ltd и YouTube-канала LESICS. Он дает качественное инженерное образование на своем канале YouTube.А «ЛЕСИКС» охватывает огромное количество инженерных тем. Сабин очень увлечен пониманием физики сложных технологий и их объяснением простыми словами. Чтобы узнать больше об авторе, перейдите по этой ссылке
Как работает однофазный двигатель?
Чтобы понять, как работает однофазный асинхронный двигатель переменного тока, полезно понять основы работы с трехфазным асинхронным двигателем.
Ток в статоре трехфазного двигателя (неподвижные катушки в двигателе) создает вращающееся магнитное поле.Магнитное поле вращается из-за сдвига фазы на 120 ° в каждой фазе источника питания. Это вращающееся магнитное поле индуцирует ток в стержнях ротора. Ток в роторе создает собственное магнитное поле. Взаимодействие между магнитными полями статора и ротора заставляет ротор вращаться. Для трехфазных двигателей следует отметить одну важную вещь: поскольку они работают на трех фазах, которые смещены друг относительно друга, они самозапускаются. (См. Верхний рисунок.)
Как он «вращается»
Однофазные двигатели работают по тому же принципу, что и трехфазные двигатели, за исключением того, что они работают только от одной фазы.Одна фаза создает колеблющееся магнитное поле, которое движется вперед и назад, а не вращающееся магнитное поле (см. Нижний рисунок). Из-за этого у настоящего однофазного двигателя нулевой пусковой момент. Однако, как только ротор начинает вращаться, он продолжает вращаться в результате колебания магнитного поля в статоре.
На протяжении многих лет инженеры изобретали умные способы запуска однофазных двигателей. Большинство из них связано с созданием второй фазы, которая помогает создавать вращающееся магнитное поле в статоре.Эту фазу часто называют стартовой или вспомогательной.
Типы однофазных двигателей
Некоторыми из различных типов однофазных двигателей являются двигатель с экранированными полюсами, двигатель с расщепленной фазой, двигатель с постоянным разделенным конденсатором (также называемый двигателем с однофазным конденсатором) и двигатель с двумя конденсаторами. Основное различие в конструкции этих двигателей заключается в том, как производится вторая фаза. В двигателях с экранированным полюсом и в двигателях с разделенной фазой конденсатор не используется, в то время как в двигателях с постоянным разделенным конденсатором (PSC) и двумя номинальными конденсаторами используется.Двигатели с разделенной фазой и конденсаторные двигатели с двумя номиналами могут использовать центробежный переключатель для отключения фазы запуска, когда двигатели набирают скорость, в то время как двигатели с экранированным полюсом и двигатели PSC не имеют переключателя.
У каждого из этих двигателей также есть свои компромиссы в производительности. Двигатели с экранированными полюсами — очень простые двигатели и, как правило, недорогие, но они имеют низкий КПД и, как правило, предназначены для применения с малой мощностью. Двигатели с расщепленной фазой, как правило, недорогие, но у них низкий пусковой момент и высокий пусковой ток.Двигатели PSC обеспечивают более высокий пусковой момент и более высокий КПД, чем двигатели без конденсатора.
>> Хотите узнать больше об асинхронных двигателях? Прочтите в нашем блоге сообщение о синхронных и асинхронных двигателях или посмотрите наше видео о том, как выбрать мотор-редуктор.
Электродвигатель | Британника
Самый простой тип асинхронного двигателя показан на рисунке в разрезе. Трехфазный набор обмоток статора вставлен в пазы в железе статора.Эти обмотки могут быть подключены по схеме «звезда», обычно без внешнего подключения к нейтральной точке, или по схеме «треугольник». Ротор состоит из цилиндрического стального сердечника с проводниками, размещенными в пазах по всей поверхности. В наиболее обычной форме эти проводники ротора соединены вместе на каждом конце ротора токопроводящим концевым кольцом.
Поперечное сечение трехфазного асинхронного двигателя.
Британская энциклопедия, Inc.Принцип работы асинхронного двигателя может быть разработан, сначала предположив, что обмотки статора подключены к трехфазному источнику питания и что набор из трех синусоидальных токов, показанных на рисунке, протекает в обмотках статора.На этом рисунке показано влияние этих токов на создание магнитного поля через воздушный зазор машины в течение шести мгновений цикла. Для простоты показана только центральная токопроводящая петля для каждой фазной обмотки. В момент t 1 на рисунке, ток в фазе a является максимально положительным, тогда как ток в фазах b и c составляет половину отрицательного значения. Результатом является магнитное поле с приблизительно синусоидальным распределением вокруг воздушного зазора с максимальным значением наружу вверху и максимальным значением внутрь внизу.В момент времени t 2 на рисунке (т.е. одна шестая цикла позже), ток в фазе c является максимально отрицательным, в то время как в фазе b и фазе a значение составляет половину. положительный. Результатом, как показано на рисунке для t 2 , снова является синусоидально распределенное магнитное поле, но повернутое на 60 ° против часовой стрелки. Исследование распределения тока для т 3 , т 4 , т 5 и т 6 показывает, что магнитное поле продолжает вращаться с течением времени.Поле совершает один оборот за один цикл токов статора. Таким образом, совокупный эффект трех равных синусоидальных токов, равномерно смещенных во времени и протекающих в трех обмотках статора, равномерно смещенных в угловом положении, должен создать вращающееся магнитное поле с постоянной величиной и механической угловой скоростью, которая зависит от частоты электроснабжение.
Получите подписку Britannica Premium и получите доступ к эксклюзивному контенту. Подпишитесь сейчасВращательное движение магнитного поля относительно проводников ротора вызывает индуцирование напряжения в каждом из них, пропорциональное величине и скорости поля относительно проводников.Поскольку проводники ротора замкнуты накоротко на каждом конце, это приведет к протеканию токов в этих проводниках. В простейшем режиме работы эти токи будут примерно равны индуцированному напряжению, деленному на сопротивление проводника. На этом рисунке показана диаграмма токов ротора за момент времени t 1 рисунка. Видно, что токи приблизительно синусоидально распределены по периферии ротора и расположены так, чтобы создавать вращающий момент против часовой стрелки на роторе (т.е.е. крутящий момент в том же направлении, что и вращение поля). Этот крутящий момент ускоряет ротор и вращает механическую нагрузку. По мере увеличения скорости вращения ротора его скорость относительно скорости вращающегося поля уменьшается. Таким образом, индуцированное напряжение уменьшается, что приводит к пропорциональному снижению тока в проводнике ротора и крутящего момента. Скорость ротора достигает постоянного значения, когда крутящий момент, создаваемый токами ротора, равен крутящему моменту, необходимому на этой скорости для нагрузки, без избыточного крутящего момента, доступного для ускорения объединенной инерции нагрузки и двигателя.
Вращающееся поле и токи, которые оно создает в короткозамкнутых проводниках ротора.
Британская энциклопедия, Inc.Механическая выходная мощность должна обеспечиваться входной электрической мощностью. Первоначальных токов статора, показанных на рисунке, достаточно для создания вращающегося магнитного поля. Чтобы поддерживать это вращающееся поле в присутствии токов ротора, показанных на рисунке, необходимо, чтобы обмотки статора несли дополнительную составляющую синусоидального тока такой величины и фазы, чтобы нейтрализовать влияние магнитного поля, которое в противном случае могло бы возникнуть. токами ротора на рисунке.Общий ток статора в каждой фазной обмотке складывается из синусоидальной составляющей для создания магнитного поля и другой синусоиды, опережающей первую на четверть цикла, или 90 °, для обеспечения необходимой электроэнергии. Вторая, или силовая, составляющая тока находится в фазе с напряжением, приложенным к статору, в то время как первая, или намагничивающая, составляющая отстает от приложенного напряжения на четверть цикла или 90 °. При номинальной нагрузке эта намагничивающая составляющая обычно находится в диапазоне 0.От 4 до 0,6 величины силовой составляющей.
Большинство трехфазных асинхронных двигателей работают с обмотками статора, подключенными непосредственно к трехфазному источнику питания постоянного напряжения и постоянной частоты. Типичные напряжения питания находятся в диапазоне от 230 вольт между фазами для двигателей относительно небольшой мощности (например, от 0,5 до 50 киловатт) до примерно 15 киловольт между фазами для двигателей большой мощности до примерно 10 мегаватт.
За исключением небольшого падения напряжения на сопротивлении обмотки статора, напряжение питания согласуется со скоростью изменения магнитного потока в статоре машины во времени.Таким образом, при питании с постоянной частотой и постоянным напряжением величина вращающегося магнитного поля остается постоянной, а крутящий момент примерно пропорционален силовой составляющей тока питания.
В асинхронном двигателе, показанном на предыдущих рисунках, магнитное поле вращается на один оборот за каждый цикл частоты питания. Для источника с частотой 60 Гц скорость поля составляет 60 оборотов в секунду или 3600 оборотов в минуту. Скорость ротора меньше скорости поля на величину, достаточную для того, чтобы индуцировать необходимое напряжение в проводниках ротора для создания тока ротора, необходимого для момента нагрузки.При полной нагрузке скорость обычно на 0,5–5 процентов ниже скорости поля (часто называемая синхронной скоростью), причем более высокий процент применяется к двигателям меньшего размера. Эта разница в скорости часто называется скольжением.
Другие синхронные скорости могут быть получены с источником постоянной частоты, построив машину с большим количеством пар магнитных полюсов, в отличие от двухполюсной конструкции, показанной на рисунке. Возможные значения скорости магнитного поля в оборотах в минуту: 120 f / p , где f — частота в герцах (циклов в секунду), а p — количество полюсов (которое должно быть четное число).Данный железный каркас может быть намотан для любого из нескольких возможных количеств пар полюсов с помощью катушек, охватывающих угол приблизительно (360/ p ) °. Крутящий момент, доступный от рамы машины, останется неизменным, поскольку он пропорционален произведению магнитного поля и допустимого тока катушки. Таким образом, номинальная мощность рамы, являющаяся произведением крутящего момента и скорости, будет примерно обратно пропорциональна количеству пар полюсов. Наиболее распространенные синхронные скорости для двигателей с частотой 60 Гц — 1800 и 1200 оборотов в минуту.
