Что такое BEAM-робототехника. Каковы основные принципы создания BEAM-роботов. Как классифицируются BEAM-роботы. Какие бывают типы BEAM-роботов. Как сделать простого BEAM-робота своими руками.
Что такое BEAM-робототехника и в чем ее особенности
BEAM-робототехника — это подход к созданию простых автономных роботов, основанный на биологических принципах. Аббревиатура BEAM расшифровывается как Biology (биология), Electronics (электроника), Aesthetics (эстетика) и Mechanics (механика). Основные особенности BEAM-роботов:
- Используют простые аналоговые схемы вместо микроконтроллеров
- Поведение вдохновлено биологическими организмами
- Часто питаются от солнечных батарей
- Собираются из доступных электронных компонентов
- Имеют минималистичный дизайн
Классификация BEAM-роботов по типу восприятия окружающей среды
BEAM-роботы классифицируются по тому, на какие стимулы окружающей среды они реагируют:
- Фототропы — реагируют на свет
- Аудиотропы — реагируют на звук
- Радиотропы — реагируют на радиоволны
- Термотропы — реагируют на тепло
Каждый тип также делится на «-филов» (движутся к источнику сигнала) и «-фобов» (удаляются от источника). Например, фотофилы движутся к свету, а фотофобы от него удаляются.
Основные типы BEAM-роботов по способу передвижения
По принципу движения выделяют следующие типы BEAM-роботов:
- Сидячие (Sitters) — стационарные роботы
- Шевелящиеся (Squirmers) — стационарные роботы с подвижными частями
- Ползающие (Sliders) — роботы, передвигающиеся как змеи или черви
- Карабкающиеся (Crawlers) — роботы на гусеничном ходу
- Прыгающие (Jumpers) — роботы, использующие вибрацию для передвижения
- Катающиеся (Rollers) — роботы на колесах или в форме шара
- Шагающие (Walkers) — роботы с ногами
- Плавающие (Swimmers) — водные роботы
- Летающие (Fliers) — воздушные роботы
- Взбирающиеся (Climbers) — роботы для вертикальных поверхностей
Принципы работы простейших BEAM-роботов
Простейшие BEAM-роботы работают по следующему принципу:
- Солнечная батарея заряжает конденсатор
- Когда напряжение достигает порогового значения, срабатывает схема управления
- Энергия конденсатора разряжается через двигатель, вызывая движение робота
- Цикл повторяется
Такая схема позволяет создавать простых автономных роботов без программирования и сложной электроники.

Примеры самодельных BEAM-роботов
Солнечная «умная голова»
Это простой BEAM-робот, поворачивающийся в сторону наиболее яркого освещения. Основные компоненты:
- Микросхема 74AC240 в качестве «мозга»
- Два фотодиода как «глаза»
- Мотор-редуктор для поворота
- Солнечная панель и конденсаторы для питания
Робот периодически сканирует окружение и поворачивается к самому яркому источнику света.
Симет — простейший солнечный робот
Симет — один из самых простых BEAM-роботов. Его конструкция включает:
- Солнечную панель
- Схему солнечного двигателя на основе компаратора 1381
- Мотор, установленный вертикально
- Корпус в форме диска
При срабатывании схемы мотор вращается, заставляя робота скользить по поверхности. При столкновении с препятствием симет меняет направление движения.
Как сделать простейшего BEAM-робота своими руками
Для создания простейшего BEAM-робота вам понадобится:
- Солнечная панель (3-6В)
- Конденсатор большой емкости (0.1-1Ф)
- Компаратор напряжения (например, LM393)
- Небольшой электромотор
- Несколько резисторов
- Макетная плата
Алгоритм сборки:

- Соберите схему солнечного двигателя на макетной плате
- Подключите солнечную панель и конденсатор
- Присоедините мотор к выходу схемы
- Закрепите конструкцию на легком шасси
- Поместите робота на свет и наблюдайте за его движениями
Такой простейший BEAM-робот будет периодически двигаться при достаточном освещении.
Преимущества и недостатки BEAM-робототехники
Преимущества BEAM-роботов:
- Простота конструкции
- Низкая стоимость компонентов
- Не требуют программирования
- Высокая энергоэффективность
- Устойчивость к внешним воздействиям
Недостатки BEAM-роботов:
- Ограниченные возможности
- Сложность реализации сложного поведения
- Непредсказуемость работы в некоторых ситуациях
- Зависимость от внешних источников энергии (для солнечных роботов)
Перспективы развития BEAM-робототехники
Несмотря на кажущуюся простоту, BEAM-робототехника продолжает развиваться. Основные направления развития:
- Создание более сложных нейроподобных схем
- Комбинирование BEAM-подходов с традиционной робототехникой
- Использование BEAM-принципов в образовании
- Применение BEAM-роботов для исследования групповых взаимодействий
BEAM-робототехника остается интересной областью для экспериментов и обучения основам робототехники и электроники.
Как сделать робота, простые роботы своими руками, самодельные BEAM-роботы
| BEAM-ROBOT — роботы, beam-робототехника, как сделать робота, самодельные роботы по beam-технологии, робототехника для начинающих. Как сделать робота самому в домашних условиях. Электроника, логические микросхемы, аналоговые роботы. |
BEAM (произносится бим) является отличной школой робототехники и электроники, так как позволяет вести освоение шаг за шагом, от простого к сложному. От создания роботов с простейшими рефлексами до систем, управляемых нейронными сетями.
| О BEAM-РОБОТАХ ЗА 15 СЕКУНД |
BEAM-роботы в отличие от обычных роботов, построенных на основе последовательных вычислений с применением микропроцессоров, используют нейросетевые принципы параллельной обработки информации, поступающей от датчиков.
При создании BEAM-существ широко применяются аналоговые технологии, позволяющие реализовать разновидности нечеткой логики, и нейронная поведенчески-ориентированная архитектура систем управления, основанная на стимул-ответных реакциях. Кроме того, одним из основных подходов в BEAM-робототехнике является принцип разумного минимализма, не позволяющий усложнять конструкции без особой надобности. |
РОБОТЫ и БИОЛОГИЯИменно следование биологическим принципам при проектировании роботов наделяет эти биоморфные создания неподражаемым поведением, которое очень сложно достичь при использовании полностью цифровых устройств (процессоров и микроконтроллеров). BEAM-технология позволяет создавать простых и шустрых роботов с уникальным поведением из доступных и распространенных компонентов без необходимости сложного программирования. Конструкция робота, выполненная с учетом анатомии насекомых, позволяет даже очень простым роботам демонстрировать достаточно интересное поведение. Насекомые выбраны в качестве одной из основных моделей в силу того, что их нервная система является одной из самых простых и эффективных относительно других живых существ. Сложное поведение может стать результатом работы всего нескольких нейронов. |
 BEAM-робот по большей части — это аналоговое устройство, использующее широкие возможности аналогового подхода.
BEAM-робот по большей части — это аналоговое устройство, использующее широкие возможности аналогового подхода.
Аналог и цифра
Поведение роботов должно быть приближено к поведению живых организмов, поэтому за основу берутся аналоговые принципы. Конечно же, использование микроконтроллеров не запрещается, но базовые инстинкты робота должны быть реализованы на основе независимых нейронных цепей.
СИСТЕМЫ ПОВЕДЕНИЯ
В основе нижнего слоя архитектуры BEAM-роботов лежат конструкции, обеспечивающие реализацию поведения типа «стимул-реакция». Такое поведение обычно реализуется с помощью низкоуровневых «нервных сетей».
Нейронная поведенчески-ориентированная архитектура — основа всего BEAM-роботостроения.
Использование аналоговых принципов позволяет реализовать системы с нечеткой логикой.
Кроме того, поведенчески-ориентированная архитектура доктора Тилдена может быть сведена до частного случая предикативной архитектуры Родни Брукса, как нейронного процесса, использующего метод предикативной (условной) реакции на стимул.
BEAM-роботы: от простого к сложному
Базовым принципом ВЕАМ-философии является эволюция роботов: развитие снизу вверх от простых конструкций к сложным системам.
Простота и красота BEAM-роботов привлекает к этому хобби людей всех возрастов и уровней образования.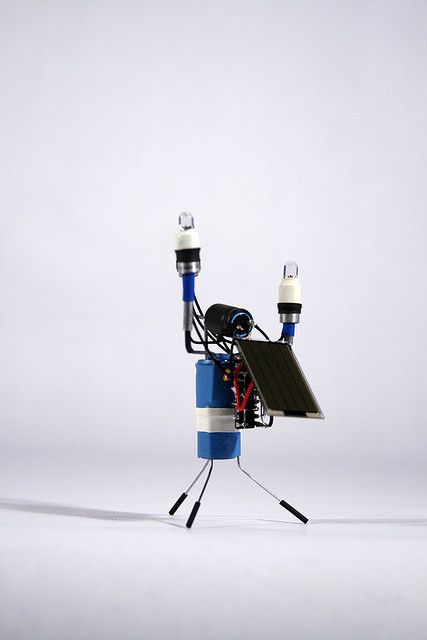 Уже с первых шагов даже начинающий способен создать работоспособные конструкции не учась программировать и не углубляясь в длительное освоение микропроцессорной техники. Если у вас хватает умения для того, чтобы выпрямить скрепку, то значит у вас хватит умения построить и BEAM-робота.
Уже с первых шагов даже начинающий способен создать работоспособные конструкции не учась программировать и не углубляясь в длительное освоение микропроцессорной техники. Если у вас хватает умения для того, чтобы выпрямить скрепку, то значит у вас хватит умения построить и BEAM-робота.
BEAM является лучшим путем изучения робототехники, логических схем и электроники для начинающих. А безграничные потенциалы, заложенные в BEAM-технологии, делают ее отличным хобби как для молодых конструкторов так и для зрелых людей, увлекающихся роботами. В отличие от большинства, основанных на процессорах роботов, BEAM-роботы дешевы, просты и могут быть построены любителями всего за несколько часов.
КАК СДЕЛАТЬ РОБОТАОтветить на вопрос: «Как сделать робота?» в случае использования BEAM-технологий достаточно просто. Часто бывает необходима всего одна микросхема, которая служит роботу и мозгом, и силовой частью, управляющей двигателями. |
РОБОТОТЕХНИКА ДЛЯ НАЧИНАЮЩИХСтоит добавить, что BEAM-технология — лучший путь для знакомства с основами электроники, а сами BEAM-роботы являются одними из непременных участников сайтов, рассказывающих про робототехнику для начинающих.Для того, чтобы сделать своего первого робота необходимо познакомиться всего с несколькими электронными деталями. Список этих электронных деталей для создания робота очень небольшой.
Вот собственно и все, что понадобится для создания BEAM-робота, наделенного фототропным поведением. 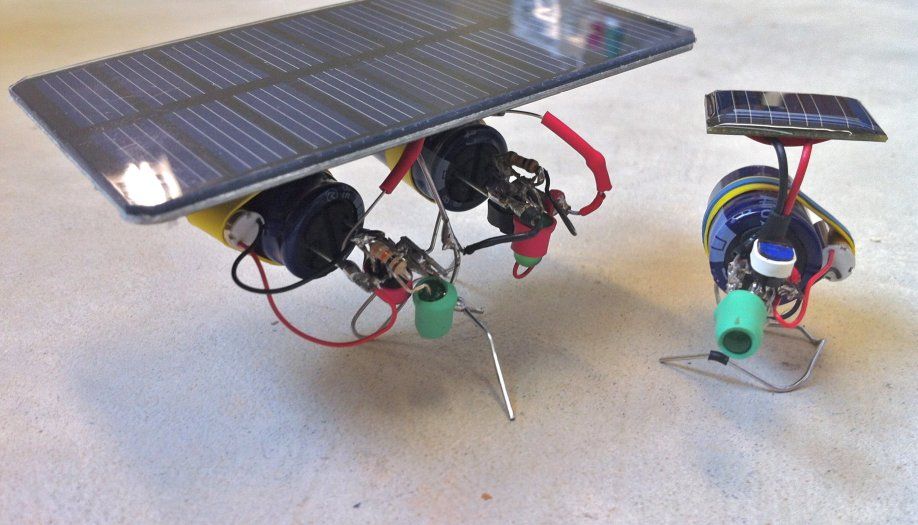 Ваш первый робот будет реагировать на свет. Более того, следуя заложенному в него фототропизму, он будет следовать за светом. Ваш первый робот будет реагировать на свет. Более того, следуя заложенному в него фототропизму, он будет следовать за светом.
Хотя робот очень прост, но у него будет широкий потенциал для развития. Добавив в него пару светодиодов и резисторов, Вы получите робота, способного избегать препятствия. Ваш робот уже не будет глупо упираться в стенку, а сможет миновать неожиданную преграду. |
BEAM — Популярная робототехника
Термин BEAM представляет собой аббревиатуру от четырех английских слов:
Предложенная пару десятилетий назад Марком Тилденом, BEAM идеология предполагает создание полностью автономных роботов на основе максимально простых электрических схем, как правило без использования микроконтроллеров и прочей сложной логики. КлассификацияBEAM роботы зачастую обладают лишь одним чувством, на основе которого они и принимают свои примитивные решения. Так, выделяют четыре основных типа:
Каждый из этих видов также разделяют на -филов и -фобов. Первые всегда идут к источнику того или иного сигнала, а вторые наоборот, убегают от него. Так например, фотофилы идут на свет, а фотофобы стараются спрятаться в тень. Имеется и еще одна классификация, касающаяся физических принципов движения. Выделяют 10 различных типов:
Ниже последовательно представлены изображения всех указанных типов BEAM роботов.
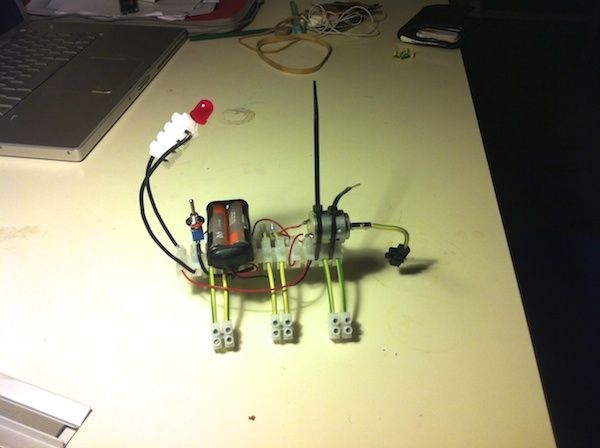
Схемотехника… И наконец мой собственный BEAM робот, которого скорее следует отнести к мутантам, так как он все же использует стандартную TTL логику для организации цикла движения. |

 Согласно классификации это шагающий BEAM робот (в общем очевидно).
Согласно классификации это шагающий BEAM робот (в общем очевидно).Beam Pro | Beam Pro
Хотите сэкономить деньги для своей компании и сократить время и поездки? Роботы телеприсутствия позволят вам делать все это, одновременно создавая более увлекательные удаленные возможности, будь то руководители, которые участвуют в совещаниях или изучают планировку нового магазина, или компании, проводящие удаленные туры.
Beam Pro используется в корпоративной, производственной, медицинской и торговой среде для повышения производительности и снижения затрат! Воспользуйтесь преимуществом робота телеприсутствия, чтобы проводить корпоративное обучение, управлять удаленным присутствием, проводить экскурсии по компании и встречаться с клиентами, коллегами-руководителями или сотрудниками.
Робот Beam Pro (BeamPro) производится компанией Suit Technologies как еще одно дополнение к роботам телеприсутствия для бизнеса. Обладая 17-дюймовым экраном, робот телеприсутствия Beam имеет множество особенностей, отличающих его от конкурентов. Большой экран и более внушительный размер обеспечивают более сильное присутствие и привлекают больше внимания на рабочем месте.
Робот может быть настроен для автоматической активации, когда удаленный пользователь может сразу же использовать робота, а также для настройки введения, когда необходимо ответить на вызов удаленного пользователя. Эта функция ответа также может выполняться через их мобильное приложение, поэтому, если клиент хочет войти в ваш Beam Pro и пытается войти из своего дома, вы можете принять этот вызов из любого места, где вы используете свое мобильное приложение Beam.
Благодаря большому экрану Beam Pro обеспечивает улучшенную способность читать жесты лица, что помогает улучшить взаимодействие с пользователем. Две HD-камеры обеспечивают широкий угол обзора в 170 градусов по горизонтали и вертикали, смягчая узкий кругозор, который часто возникает при использовании традиционных веб-камер. BeamPro также имеет четыре беспроводных радиомодуля, которые позволяют ему одновременно подключаться к нескольким беспроводным точкам и беспрепятственно передавать данные между точками без задержек и задержек. Beam — единственный робот телеприсутствия, в котором реализована эта функция, поскольку технология запатентована компанией «Подходящие технологии» (производителем роботов Beam).
Две HD-камеры обеспечивают широкий угол обзора в 170 градусов по горизонтали и вертикали, смягчая узкий кругозор, который часто возникает при использовании традиционных веб-камер. BeamPro также имеет четыре беспроводных радиомодуля, которые позволяют ему одновременно подключаться к нескольким беспроводным точкам и беспрепятственно передавать данные между точками без задержек и задержек. Beam — единственный робот телеприсутствия, в котором реализована эта функция, поскольку технология запатентована компанией «Подходящие технологии» (производителем роботов Beam).
Робот Beam оснащен системой из шести микрофонов, которая позволяет уменьшить фоновый шум и эхоподавление. Также включена функция под названием «Режим вечеринки», которая направлена на устранение всего шума, кроме того, что находится прямо перед вами; отлично подходит для производства или склада или групповых сред. Beam Pro предлагает более мощный динамик, чем Beam Plus, способный воспроизводить около 100 децибалов. В будущем они планируют добавить функцию «Активное прослушивание», в которой Beam будет пытаться сопоставить правильную громкость с вашим окружением. Если вы находитесь в тихой комнате? Объем уменьшится. Если вы находитесь на заводе-изготовителе, объем соответственно увеличится.
Если вы находитесь в тихой комнате? Объем уменьшится. Если вы находитесь на заводе-изготовителе, объем соответственно увеличится.
BeamPro может похвастаться примерно восьмичасовым временем автономной работы, что позволяет вам работать целый день без необходимости подзарядки. Когда необходима подзарядка, пользователь может просто отвезти робота обратно к зарядной станции.
В настоящее время Beam работает с операционными системами Windows 7 (или выше) и OS X 10.7 (или выше) (на данный момент не совместим с Linux). Кроме того, компания Suits Technologies также выпустила функциональные возможности для устройств Android и iOS с помощью приложений Beam, что позволяет пользователям управлять роботом с помощью этих планшетов или смартфонов.
*Требуется месячный контракт.
Роботы BEAM
Power-Smart Head, версия 3
Давненько я не собирал роботов BEAM, но какая-то сырая погода побудила меня вернуться к паяльник и сделать нового бота.
Это еще одна «умная» головка с питанием от солнечной энергии, построенная на базе микросхемы 74AC240.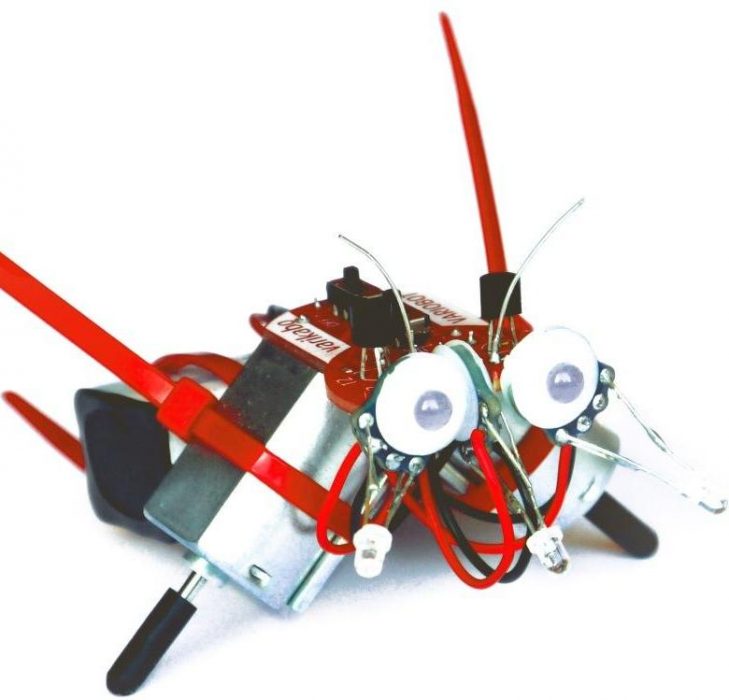 Цепь — это
Схема умной головы на солнечной энергии.
Мотор — хороший редукторный мотор MicroMo 141:1, который я купил на Ebay. У него есть винтик
прикреплен к шпинделю, что позволило мне установить его в просверленную часть жесткого диска для основания.
Цепь — это
Схема умной головы на солнечной энергии.
Мотор — хороший редукторный мотор MicroMo 141:1, который я купил на Ebay. У него есть винтик
прикреплен к шпинделю, что позволило мне установить его в просверленную часть жесткого диска для основания.
Этот парень стреляет каждые несколько секунд при ярком свете и почти непрерывно при дневном свете, вращая довольно быстро и плавно, чтобы указать на самую яркую часть окружающей среды. Я доволен этим.
постоянная ссылка | роботы | 2009.01.25-17:20.00
Симет
В Symet используется одна из самых простых схем BEAM. Солнечная батарея заряжает конденсаторы (один или несколько параллельно). Цепь солнечного двигателя контролирует напряжение, и когда он отключается, мощность сбрасывается через двигатель. Симетс опирается на мотор-шпиндель и скользит по земле, когда мотор вращается. Когда они во что-то врезаются, они наклоняются на другую ось и уходят в другом направлении.
Это один из первых созданных мной ботов BEAM произвольной формы.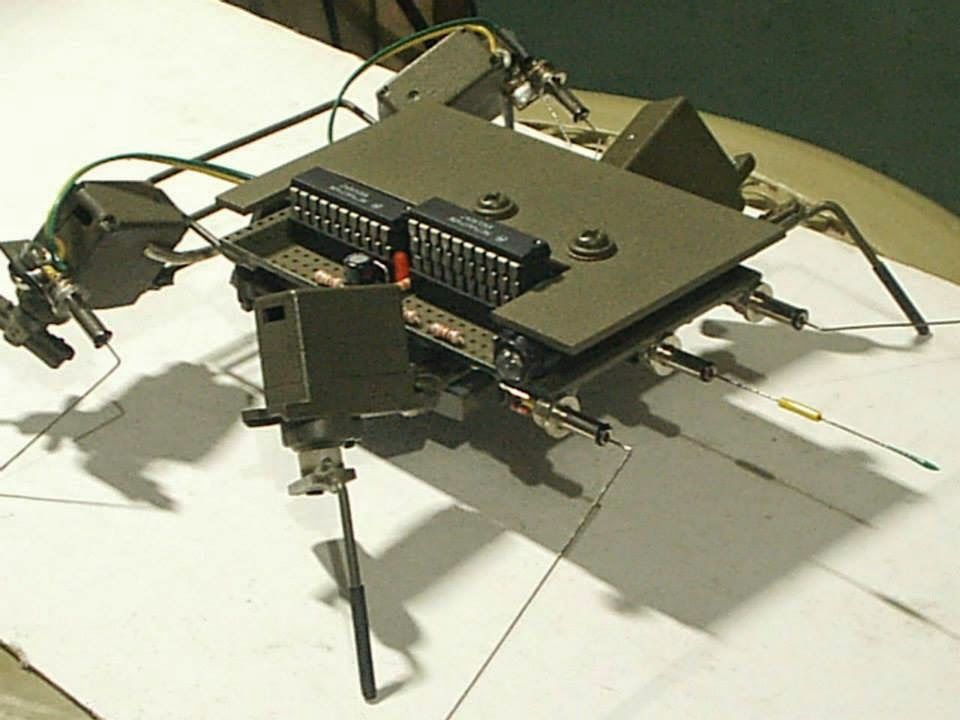 Схема представляет собой схему солнечного двигателя на основе 1381 и построена вокруг двигателя с компонентами, расположенными радиально вокруг центральной оси. В качестве бампера я использовал пластину от жесткого диска ноутбука.
Схема представляет собой схему солнечного двигателя на основе 1381 и построена вокруг двигателя с компонентами, расположенными радиально вокруг центральной оси. В качестве бампера я использовал пластину от жесткого диска ноутбука.
Хитрость с симетом заключается в том, чтобы получить правильный угол относительно земли и контакт шпинделя с землей, чтобы симет двигался по прямой линии, пока не наткнется на что-нибудь. Я потерпел неудачу с этим, но он довольно счастливо крутится по кругу. Я также узнал, что горячий клей мгновенно затвердевает при контакте с холодным металлом. Либо используйте наконечник пистолета для горячего клея, чтобы нагреть металл перед склеиванием, либо используйте эпоксидную смолу.
постоянная ссылка | роботы | 2007.11.19-22:31.00
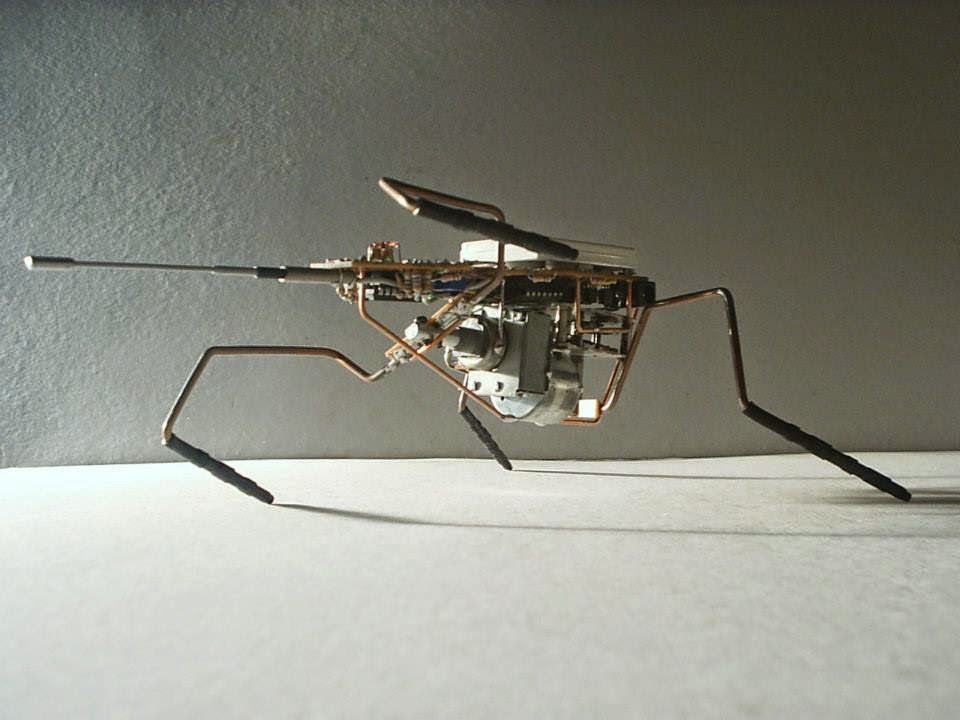
Палтус
Турботы — это роботы BEAM, которые передвигаются, вращая жгутики, заставляя их кувыркаться по полу. Самые простые — это просто двигатели, приводимые в движение солнечным двигателем, и они не имеют возможности направления; они широко известны как турметы.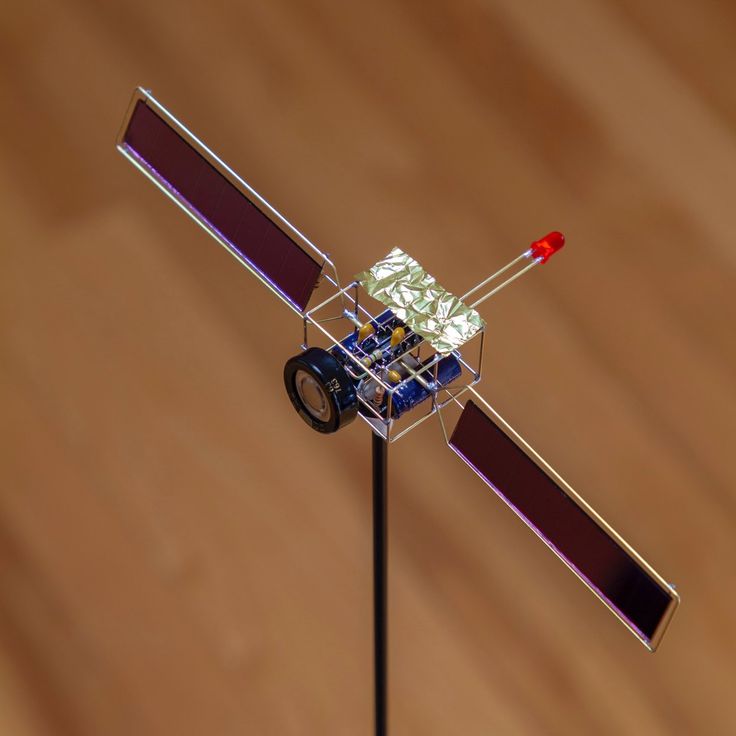 Более сложные палтусы могут двигаться к свету, реверсировать свои двигатели, чтобы выбраться из клубков, и другие вещи.
Более сложные палтусы могут двигаться к свету, реверсировать свои двигатели, чтобы выбраться из клубков, и другие вещи.
Некоторое время я играл с несколькими схемами тюрбо, особенно с схемами Дж. Вольфганга Гёрлиха (у которого есть отличная серия страниц о различных конструкциях тюрбо). Его палтус Scuff выглядел особенно многообещающе, так как он работал на солнечной энергии и обладал фототактическими свойствами.
Тем не менее, я также хотел построить бота, работа которого точно помещалась бы между двумя солнечными батареями. Это диктовало форму тела (прямоугольную), которая сильно ограничивала поведение, так как трудно повернуться, если ось вращения обоих жгутиков одинакова. Но мне хотелось чего-то чуть более сложного, чем одномоторный палтус.
Схема, которую я придумал, представляет собой простую модификацию схемы photovore на основе 74AC240 (но мне жаль, что я сначала не увидел предостережение Уилфа об этой схеме!). Во-первых, он соляризован солнечным двигателем Миллера. Во-вторых, я хотел, чтобы схема выбирала, какой двигатель использовать, исходя из того, какой солнечный элемент получает больше света (то есть бот знает, какой путь «вверх»). Поскольку у бота два солнечных элемента, я мог бы заменить фотодиодный делитель напряжения в этой цепи самими солнечными элементами, взяв опорное напряжение между двумя элементами (соединенными последовательно) через большой резистор. Диоды Шоттки с обратным смещением на каждом солнечном элементе гарантируют, что неосвещенный элемент не ограничивает зарядный ток.
Во-вторых, я хотел, чтобы схема выбирала, какой двигатель использовать, исходя из того, какой солнечный элемент получает больше света (то есть бот знает, какой путь «вверх»). Поскольку у бота два солнечных элемента, я мог бы заменить фотодиодный делитель напряжения в этой цепи самими солнечными элементами, взяв опорное напряжение между двумя элементами (соединенными последовательно) через большой резистор. Диоды Шоттки с обратным смещением на каждом солнечном элементе гарантируют, что неосвещенный элемент не ограничивает зарядный ток.
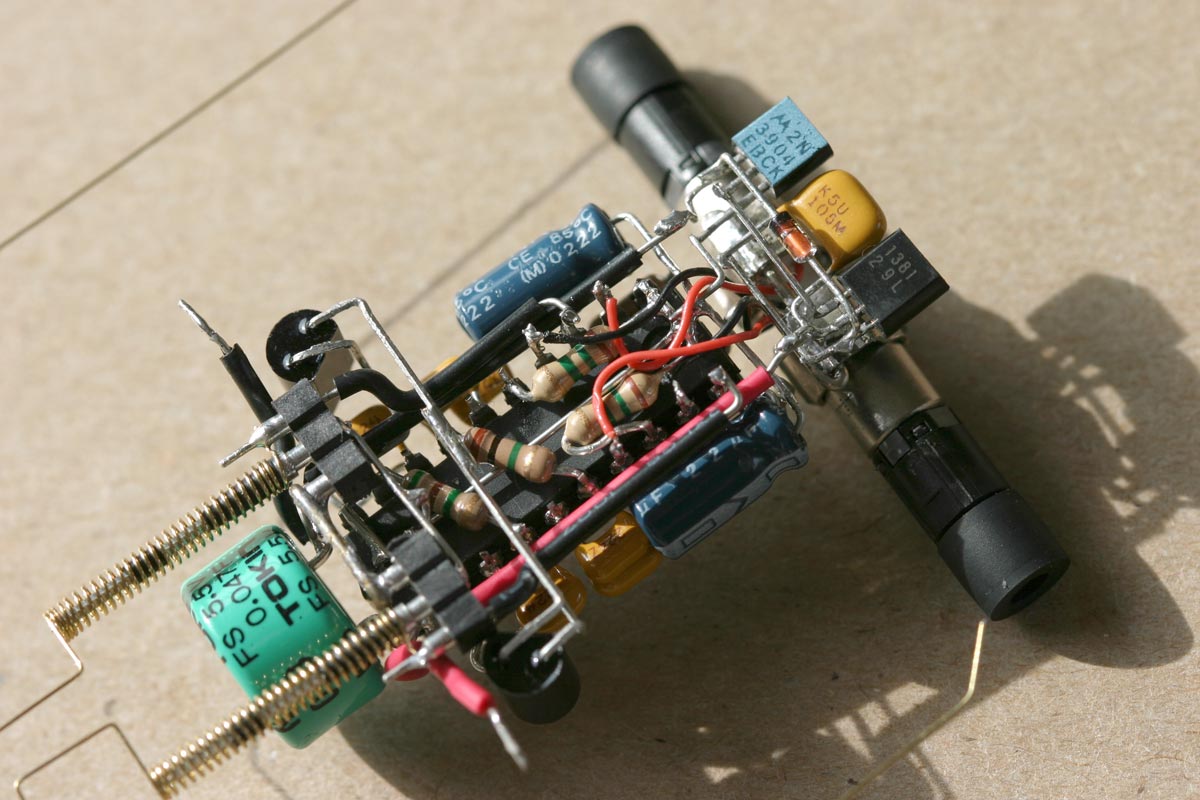
Внутренности этого зверя показаны ниже. Он довольно плотно упакован! (Щелкните изображение, чтобы увеличить его.)
Вы можете увидеть Miller SE в верхнем левом углу. Есть два 74AC240: сдвоенные для увеличения тока возбуждения двигателей. Основной накопительный конденсатор 0,047F; сам по себе он не может сбрасывать достаточный ток для надежного запуска мотор-редукторов (которые представляют собой GM11 от Solarbotics), поэтому для работы есть еще один конденсатор на 1000 мкФ./cdn.vox-cdn.com/uploads/chorus_asset/file/14122516/beam-1020.1419978987.jpg) Все это склеено эпоксидной смолой с несколькими пластиковыми прокладками, позволяющими шестерням очищать контактные площадки солнечных батарей.
Все это склеено эпоксидной смолой с несколькими пластиковыми прокладками, позволяющими шестерням очищать контактные площадки солнечных батарей.
Этот парень довольно активен при ярком свете, двигаясь по прямой. У него есть несколько проблем, например, он может оказаться сбалансированным на одном конце, и ни одна из ячеек не будет получать много света (это можно исправить, добавив несколько ударов, чтобы он опрокинулся), и ноги могут ударять друг друга. Но меня привлекает компактная конструкция.
постоянная ссылка | роботы | 2007.11.19-22:31.00
Интеллектуальная головка на солнечной энергии
Я экспериментировал с несколькими схемами умных головок на макетной плате, но ни одна из них не показалась мне столь же простой и надежной, как простая фотоголовка. Тем не менее, я хотел попробовать одну из мощных головок, поэтому пошел дальше и построил эту.
Это умная голова с солнечной батареей. Он основан на 74AC240 с двумя накопительными конденсаторами (большие серебряные цилиндры) и фотодиодами в качестве «глаз». Солнечный двигатель имеет свободную форму, чтобы лежать над ИС. Двигатель представляет собой мотор-редуктор Nihon из объектива в сборе (любезно предоставленный Fair Radio Sales), залитый эпоксидной смолой в основание, сделанное из деталей двигателя жесткого диска.
Солнечный двигатель имеет свободную форму, чтобы лежать над ИС. Двигатель представляет собой мотор-редуктор Nihon из объектива в сборе (любезно предоставленный Fair Radio Sales), залитый эпоксидной смолой в основание, сделанное из деталей двигателя жесткого диска.
Эта голова работает довольно хорошо, но выглядит немного уродливо. Расположить компоненты вокруг цилиндрического двигателя сложнее, чем у красивых прямоугольных блоков Omron.
постоянная ссылка | роботы | 2007.11.19-22:31.00
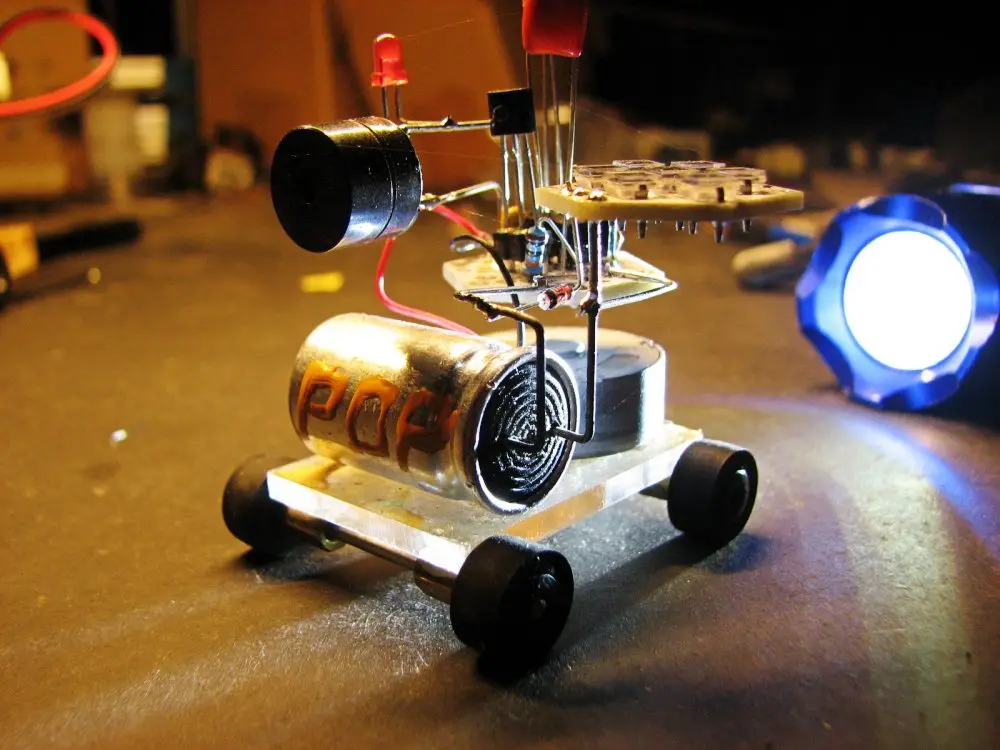
Спиннер
Спиннер — это очень простой бот, который просто заряжает емкость (зеленый приземистый цилиндр на изображении) через солнечную панель, которая затем разряжается через двигатель при достижении определенного напряжения. Это точно такая же схема, как и сымет (с некоторой корректировкой значений компонентов), но бот настроен «стоя на голове» так, что голова крутится при срабатывании мотора.
Этого робота было довольно легко построить.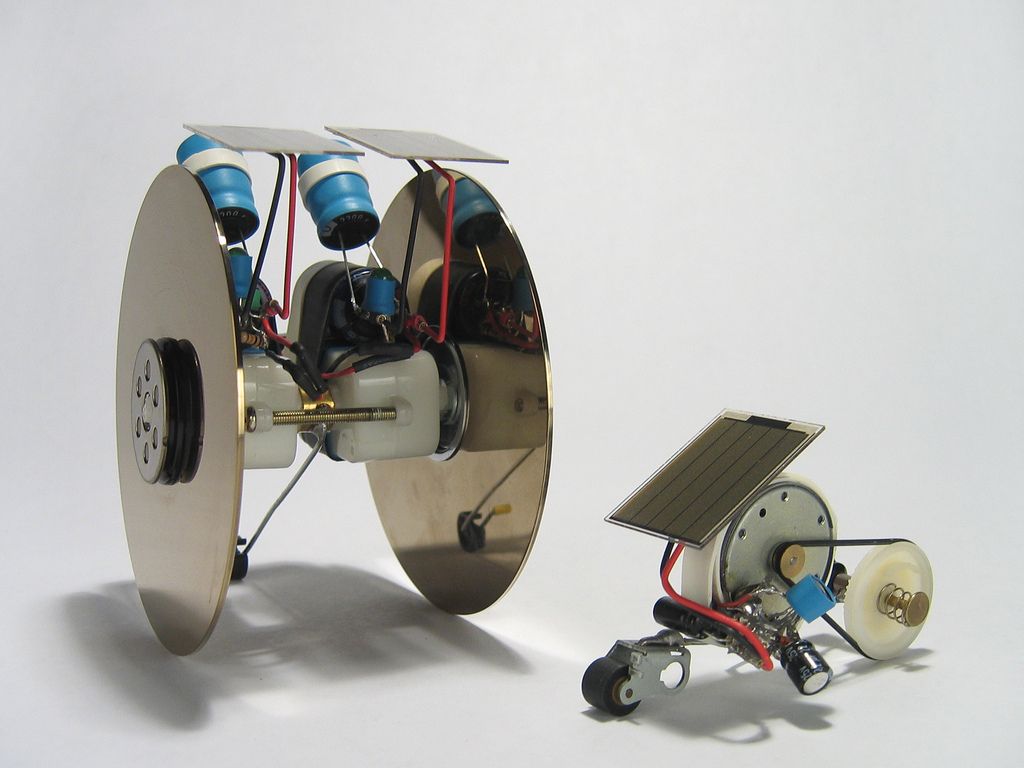 Одна вещь, о которой следует помнить, это то, что когда у вас есть схема на макетной плате, двигатель работает без нагрузки, двигатель будет вращаться намного дольше, чем под нагрузкой. Мне пришлось модернизировать более крупный конденсатор времени на двигателе Миллера, чтобы этот парень вращался в течение разумного времени при каждой зарядке. Вы можете увидеть солнечный двигатель здесь:
Одна вещь, о которой следует помнить, это то, что когда у вас есть схема на макетной плате, двигатель работает без нагрузки, двигатель будет вращаться намного дольше, чем под нагрузкой. Мне пришлось модернизировать более крупный конденсатор времени на двигателе Миллера, чтобы этот парень вращался в течение разумного времени при каждой зарядке. Вы можете увидеть солнечный двигатель здесь:
Медные петли на самом деле представляют собой большие С-образные зажимы от некоторых больших (проекторных или копировальных) объективов, приклеенных горячим клеем к корпусу двигателя и припаянных друг к другу.
постоянная ссылка | роботы | 2007.11.19-22:31.00
Солнечная головка
Это моя третья попытка сделать солнечную головку, опять же с мотор-редуктором Nihon, как и во второй раз. Я пытался улучшить внешний вид, а также экспериментировал со схемой Power Smart Head Version 3. Я не смог заставить блокирующий SE работать очень хорошо в этой схеме, поэтому я модифицировал схему, чтобы использовать стандартный солнечный двигатель Миллера, и, таким образом, смог использовать запасные инверторы для управления двигателем.
К сожалению, этому зверю для хорошей работы нужен очень яркий свет, поэтому для лучшей работы ему нужен прямой солнечный свет. Я мог бы попробовать это с более низким триггером напряжения в какой-то момент.
постоянная ссылка | роботы | 2007.11.19-22:31.00
Ролик
Этот бот — мой первый эксперимент с гибкими солнечными батареями. Хотя они не так эффективны, как ячейки, используемые в большинстве ботов BEAM, гибкость этих ячеек позволяет использовать некоторые новые конфигурации ботов.
Бот представляет собой простой солнечный каток, приводимый в движение солнечным двигателем Миллера. Рычаг прикреплен к шпинделю эффективного мотор-редуктора, а внутри находится накопительный конденсатор емкостью 0,047 Ф. Гибкая солнечная батарея намотана на два игрушечных колеса, центр одного из которых удален для двигателя. Тупые резиновые шины налезают на концы. Вы можете увидеть внутренности бота здесь.
При полном солнечном свете этот бот срабатывает каждые несколько секунд, что чаще, чем я думал, учитывая, что только часть ячейки получает прямой свет. Он также может карабкаться по низким препятствиям.
Он также может карабкаться по низким препятствиям.
постоянная ссылка | роботы | 2007.11.19-22:31.00
Солнечная фотовспышка
Фотосхема Bare Bones представляет собой очень простую схему, в которой используется тот факт, что напряжение переключения входов инвертора на 74AC240 составляет примерно половину напряжения питания. В схеме используется пара фотодиодов в качестве делителя напряжения. Средняя точка делителя преобразуется инвертором в «высокий» или «низкий» сигнал, который используется для определения того, какой из двух двигателей должен работать.
Какое-то время я обдумывал идею использования двух солнечных панелей вместо фотодиодов и просто брал эталонное напряжение в средней точке, чтобы выяснить, какая панель получает больше света. Затем, при соответствующей конфигурации солнечных панелей и проводки двигателя, должно быть легко сделать бота, который движется к свету без фотодиодов. Вот результат (на этот раз со схемой!).
Его корпус представляет собой микросхему 74AC240 с брюшком конденсатора. Голова представляет собой солнечный двигатель Миллера, в котором используется пара компонентов для поверхностного монтажа; старый SMT-диод и крошечный конденсатор, взятые из старых печатных плат:
Голова представляет собой солнечный двигатель Миллера, в котором используется пара компонентов для поверхностного монтажа; старый SMT-диод и крошечный конденсатор, взятые из старых печатных плат:
Этот парень хорошо работает. Это немного медленно, если свет падает только на одну панель, но требуется очень мало щелчков, чтобы сориентироваться в направлении света. Как только обе панели получают одинаковое освещение, оба двигателя щелкают, и он движется вперед.
постоянная ссылка | роботы | 2007.11.19-22:31.00
Роботы BEAM
Роботы BEAM — это простые маленькие роботы, поведение которых вдохновлено биологическими явлениями. В значительной степени они являются детищем Марка Тилдена, который разработал большинство основных схем. В них используются общедоступные электронные компоненты, в том числе некоторые аналоговые ИС, и большинство из них питаются от солнечной энергии.
BEAM — это аббревиатура от «Биология, электроника, эстетика и механика», которая описывает основные факторы, влияющие на конструкцию роботов BEAM.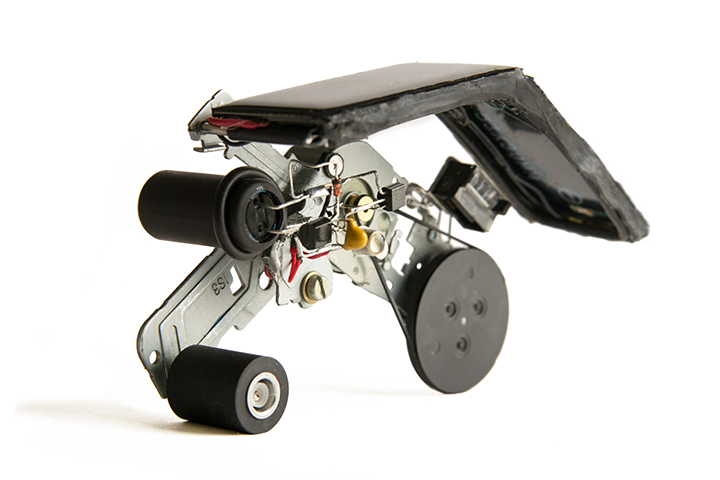
постоянная ссылка | роботы | 2007.11.19-22:31.00
Спиннер личинки
Цепь magbot представляет собой аккуратную маленькую схему, которая сбрасывает энергию через катушку, чтобы произвести движение. Это основа для маятникового комплекта Solarbotics SunSwinger и различных комплектов «танцоров солнца».
Я хотел сделать бота с этой схемой, который мог бы вращаться на 360°, используя магниты жесткого диска и катушку Solarbotics «Major Henry». Моя первая попытка использовала разобранный двигатель CD-ROM для оси, но у него было слишком сильное демпфирование (даже после удаления магнитов). В итоге я использовал прижимной ролик видеомагнитофона, который имеет очень свободно вращающийся подшипник (но его пришлось с трудом снять с резинового колеса).
Мне посчастливилось найти пару магнитов жесткого диска в рамке от старого жесткого диска. Вертикальное шасси от старого видеомагнитофона. Корпус вращающейся части представляет собой механизм головки жесткого диска, который идеально подходит для втулки прижимного ролика. Схема смонтирована на этом рычаге с некоторой осторожностью, чтобы сбалансировать его так, чтобы рычаг мог вращаться по всему периметру при достаточном усилии.
Схема смонтирована на этом рычаге с некоторой осторожностью, чтобы сбалансировать его так, чтобы рычаг мог вращаться по всему периметру при достаточном усилии.
За этим ботом интересно наблюдать. При ярком свете начинает раскачиваться практически сразу, а через несколько покачиваний просто добирается до вершины, а затем заканчивается. После этого он будет продолжать вращаться по кругу.
постоянная ссылка | роботы | 2007.11.19-22:31.00
Головка Power-Smart, версия 2
Перечитав книгу Уилфа BEAM Heads 101, я желание сделать другую голову. Я также хотел, чтобы у него было больше «присутствия», чем у моих предыдущих голов, а это означало, что это должно было быть более очевидным, когда он поворачивался, и, следовательно, менее симметричным. У меня случайно завалялись некоторые детали что я мог бы использовать, чтобы сделать такого бота.
Несуществующий проигрыватель лазерных дисков предоставил двигатель и шестерни; это сборка, которая переворачивает считывающую головку с одного
сторону диска к другой. Хорошая большая солнечная панель позволяет боту работать при достаточно ярком комнатном освещении,
а обычная пара фотодиодов спрятана под солнечной панелью. Основание представляет собой кусок стали, удерживающий
головка магнитится на большом старом жестком диске и достаточно тяжелая, чтобы все это не упало.
Хорошая большая солнечная панель позволяет боту работать при достаточно ярком комнатном освещении,
а обычная пара фотодиодов спрятана под солнечной панелью. Основание представляет собой кусок стали, удерживающий
головка магнитится на большом старом жестком диске и достаточно тяжелая, чтобы все это не упало.
Схема представляет собой основную схему смарт-головы, с солнечным двигателем Миллера. Поскольку я использовал отдельный SE, я мог объединить два набора по три инвертора в каждом для управления мотор. На самом деле я по ошибке использовал 74HCT240 (имелся в виду HC240), но в любом случае он работает очень хорошо!
постоянная ссылка | роботы | 2007.11.19-22:31.00
Двойной светодиодный насос
Пуммер — это робот BEAM, который поглощает солнечную энергию в течение дня (путем зарядки большого конденсатора или перезаряжаемой батареи от солнечной панели) и высвобождает ее ночью, обычно мигая одним или несколькими светодиодами. Думайте об этом как о роботе-«заводе».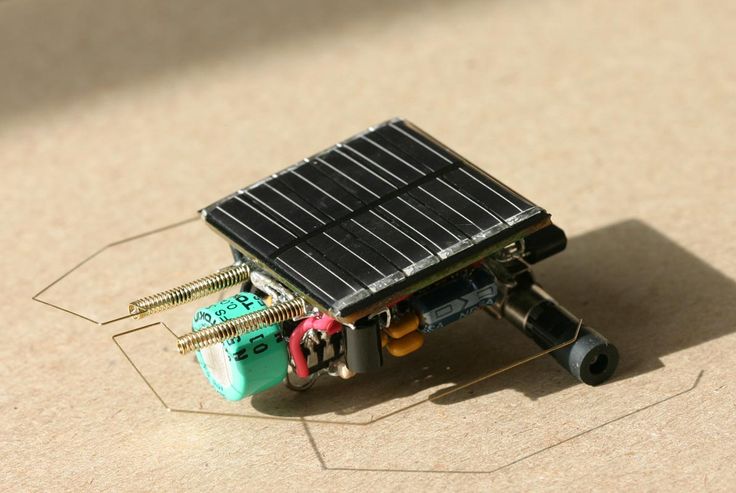 Хитрость здесь заключается в том, чтобы получить схему, которая является энергоэффективной (чтобы светодиоды могли мигать как можно дольше, когда стемнеет) и мигает светодиодами интересными способами.
Хитрость здесь заключается в том, чтобы получить схему, которая является энергоэффективной (чтобы светодиоды могли мигать как можно дольше, когда стемнеет) и мигает светодиодами интересными способами.
Это насос, который я построил. Это двойной светодиодный насос, основанный на двухъядерной схеме с использованием микросхемы 74HCT240. Схема описана на сайте Solarbotics (см. схему аналогичной конструкции, в которой вместо конденсатора используются перезаряжаемые батареи).
Каркас отбойного молотка состоит из трех проставок жесткого диска; два для основания (тонкий темный поверх большего алюминиевого) и один, расположенный вертикально. И HCT240, и накопительный конденсатор 1F просто помещаются внутри соответствующих колец, которые вдохновили дизайн.
Светодиоды супер-яркие синие и зеленые. Поскольку они высасывают изрядное количество сока, этот насос работает только около часа после наступления темноты.
постоянная ссылка
|
роботы | 2007.11. 19-22:31.00
19-22:31.00
Солнечный Херби
Herbie не является строго ботом BEAM, но он следует традиции BEAM использовать ИС для целей, для которых они никогда не предназначались. Схема Херби основана на интегральной схеме LM386, которая обычно используется в качестве аудиоусилителя. В схеме Герби микросхема используется для усиления разницы между выходами пары фотодиодов, придавая боту фототактическое поведение.
Вот мой Солар Херби. Это стандартная схема Герби с солнечным двигателем Миллера. LM386 спрятан над синим потенциометром (я сплющил штифты, чтобы он сидел ровно). Небольшие двигатели взяты от приводов компакт-дисков ноутбуков, а солнечный двигатель расположен между двигателями и конденсатором.
постоянная ссылка | роботы | 2007.11.19-22:31.00
Фотовспышка FLED
Фотовспышки FLED используют свойство мигающих светодиодов (FLED), заключающееся в их светочувствительности; они состоят из пары спаренных солнечных двигателей с FLED в качестве фотодетекторов.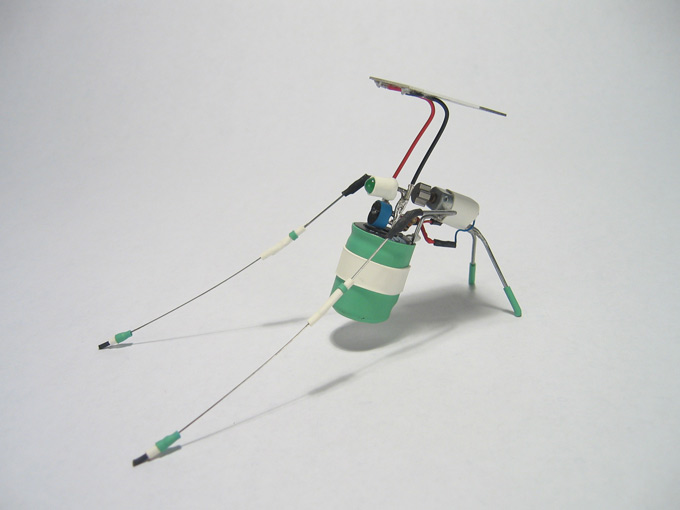
Я построил этот фотопоппер, следуя Учебнику Рэя по FLED Photopopper, но я установил свою группу транзисторов вверх дном, чтобы снизу он выглядел лучше. Результаты весьма радуют, и это довольно активный малыш. Он первым начинает появляться, когда солнце освещает мою коллекцию роботов. Единственная проблема в том, что он может упасть на задницу; либо двигатели должны быть размещены дальше назад, либо больший вес должен быть ближе к передней части. О, и я почищу эти моторные провода на днях.
постоянная ссылка | роботы | 2007.11.19-22:31.00
Flatbot FLED Photopopper
Это стандартный FLED фотовспышка, сделанный с солнечным элементом Sanyo и парой двигателей, извлеченных из приводов компакт-дисков ноутбука (двигатели, которые перемещают головку вперед и назад по поверхности диска).
Задача здесь заключалась в том, чтобы аккуратно разместить все под солнечной панелью. Этот бот довольно активен при солнечном свете, но, похоже, не очень фототропен.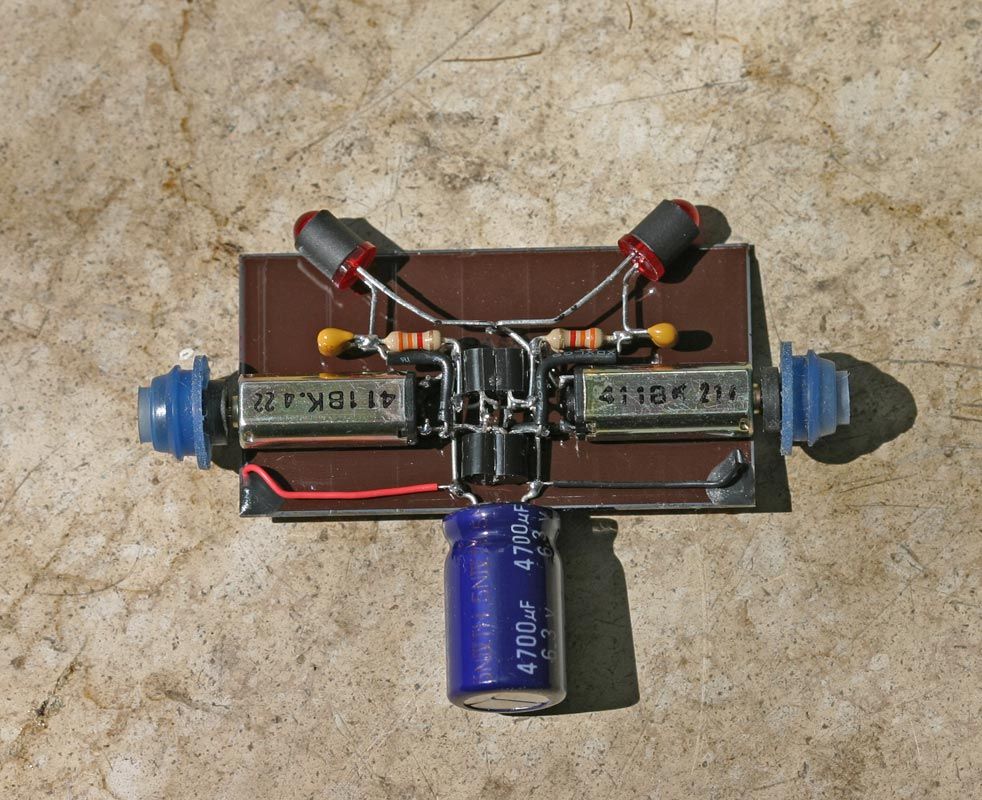
постоянная ссылка | роботы | 2007.11.19-22:31.00
Двойная головка панели солнечных батарей
Солнечный фотовспышка заменил два фотодиода схемы фотосъемника на голых костях солнечными панелями, взяв опорное напряжение из их средней точки. Эту технику было легко применить и к схеме голых костей головы (с модификацией, предложенной здесь Уилфом Ригтером).
В результате получается двойная солнечная панель без дополнительных фотодетекторов.
Как и моя голова с голыми костями, этот робот использует выталкивающий двигатель дисковода гибких дисков Omron с основанием, сделанным из частей двигателя шпинделя жесткого диска. Цепь коммутируется солнечным двигателем Miller, а под солнечными панелями находятся два накопительных конденсатора емкостью 3300 мкФ. Я использовал некоторые утилизированные компоненты поверхностного монтажа для конденсатора и диода солнечного двигателя, которые делают SE красивым и маленьким, как показано на второй фотографии. Чип 74AC240. Схема имеется.
Чип 74AC240. Схема имеется.
постоянная ссылка | роботы | 2007.11.19-22:31.00
Голая фотоголова
«Головной» робот BEAM — это робот, который может «осматриваться» в поисках самого яркого источника света. Обычно это означает установку всего поверх редукторного двигателя, а затем крепление шпинделя двигателя к основанию.
Это простая фотоголовка, в которой используется микросхема 74AC240 и два фотодиода в качестве детекторов света. Он основан на этой схеме, в которой используется солнечный двигатель Миллера. Вы можете видеть солнечный двигатель произвольной формы, нависающий над передней частью конденсатора; микросхема спрятана под солнечной панелью.
Двигатель представляет собой мотор-редуктор Omron, полученный из дисковода для гибких дисков Mac (это двигатель, который придает дисководам для гибких дисков Mac их отличительную особенность — программный выброс). Основание изготовлено из частей двигателя жесткого диска.
Этот маленький парень болтает каждую секунду или около того на солнце. Это была моя первая хорошо работающая голова, и мне нравится, как она получилась.
Это была моя первая хорошо работающая голова, и мне нравится, как она получилась.
постоянная ссылка | роботы | 2007.11.19-22:31.00
ЛУЧ
BEAMAnt — это фототактический бот, поведение которого может быть сложным в зависимости от уровня освещенности. У него есть два фотодиода для восприятия света и две антенны, которые переключают моторы на задний ход, когда они касаются чего-либо.
Ядром BEAMAnt является микросхема 74AC240, соединенная в виде двух связанных двухъядерных процессоров. Первый «фото» двухъядерник колеблется с частотой и симметрией, определяемыми светом, падающим на фотодиоды — медленнее при слабом освещении и быстрее при ярком свете. Второй двухъядерный «двигатель» генерирует базовые колебания влево/вправо, которые используются для чередования двигателей. Два двухъядерных ядра соединены резисторами, что может привести к сложному взаимодействию между ними. Схема имеет два тактильных датчика, которые временно меняют полярность двигателя на другой стороне.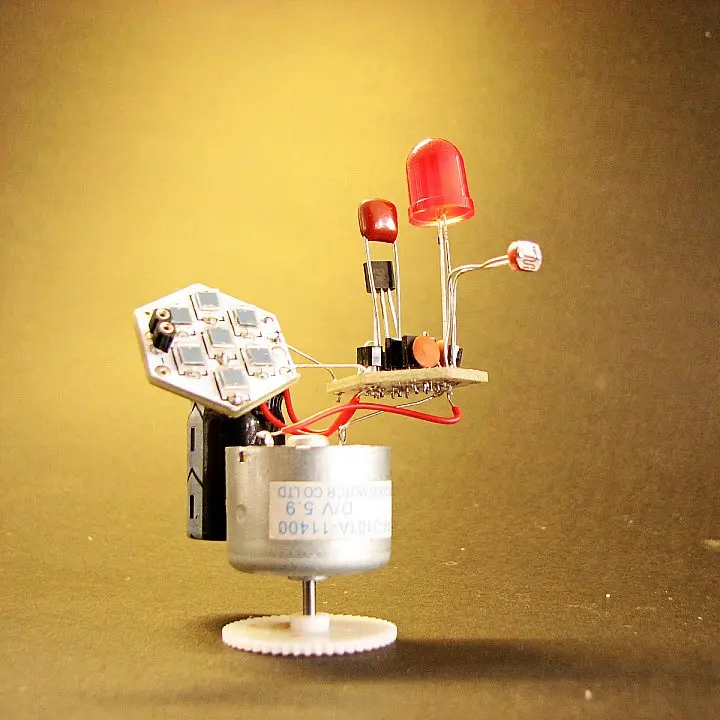 Это позволяет боту отворачиваться от препятствий.
Это позволяет боту отворачиваться от препятствий.
Этот BEAMAnt основан на двух небольших редукторных двигателях (Solarbotics GM15) на изогнутой раме из скрепки. Я соляризировал схему с помощью солнечного двигателя Миллера, который вы можете видеть на снимке «под капотом» ниже. Большая часть схемы сформирована вокруг микросхемы ‘240; два фотодиода расположены под передними углами солнечного элемента, а конденсатор 0,047F действует как нос.
Изначально бот просто мчался вперед на салазках, сделанных из согнутой скрепки. Однако ни на чем, кроме очень гладкой поверхности, бот не мог развернуться. Я решил эту проблему, приклеив горячим клеем небольшой подшипник от шагового двигателя привода гибких дисков поверх салазок.
Этот бот обладает впечатляющими фототактическими способностями. Если источник света находится в стороне, он будет поворачиваться вокруг своей оси, пока не окажется лицом к свету, а затем направится прямо к нему. Избегание препятствий может потребовать небольшой настройки; Конденсаторы сенсорных таймеров не очень хорошо работают в боте на солнечных батареях, потому что мощность постоянно падает.
