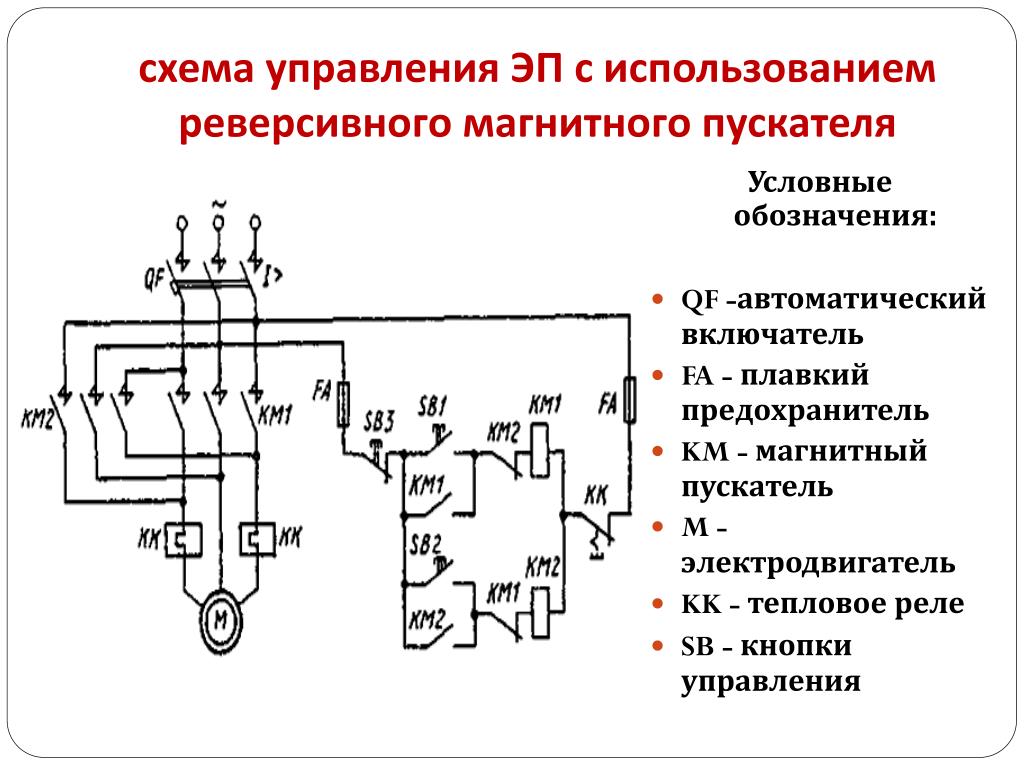
Что такое блок управления двигателем переменного тока. Какие бывают типы блоков управления. Для чего используются блоки управления двигателями переменного тока. Как выбрать подходящий блок управления. Какие преимущества дает использование блоков управления двигателями.
Что такое блок управления двигателем переменного тока
Блок управления двигателем переменного тока — это электронное устройство, которое позволяет контролировать работу асинхронного электродвигателя. Основные функции блока управления:
- Пуск и остановка двигателя
- Регулирование скорости вращения
- Изменение направления вращения
- Защита двигателя от перегрузок
- Плавный пуск и торможение
- Поддержание заданной скорости при изменении нагрузки
Блок управления содержит силовую часть для коммутации обмоток двигателя и электронную схему управления на микроконтроллере. Это позволяет реализовать сложные алгоритмы управления двигателем.
Основные типы блоков управления двигателями переменного тока
Существует несколько основных типов блоков управления асинхронными двигателями:
1. Блоки с релейно-контакторным управлением
Простейший тип блоков, обеспечивающий только пуск/остановку двигателя с помощью электромагнитных пускателей. Не позволяют регулировать скорость.
2. Блоки с тиристорным управлением
Используют тиристоры для плавного регулирования напряжения на обмотках двигателя. Позволяют изменять скорость в небольших пределах.
3. Частотные преобразователи
Наиболее современный тип блоков управления. Преобразуют входное напряжение сети в трехфазное напряжение регулируемой частоты. Обеспечивают плавное регулирование скорости в широком диапазоне.
4. Устройства плавного пуска
Специализированные блоки для плавного запуска мощных двигателей. Ограничивают пусковой ток и момент для снижения нагрузки на сеть и механизмы.
Области применения блоков управления двигателями переменного тока
Блоки управления асинхронными двигателями широко применяются в различных отраслях промышленности:
- Станки и производственное оборудование
- Конвейеры и транспортеры
- Насосы и вентиляторы
- Подъемно-транспортные механизмы
- Компрессоры
- Системы вентиляции и кондиционирования
- Дробильно-размольное оборудование
Использование блоков управления позволяет оптимизировать работу электроприводов, снизить энергопотребление и повысить эффективность технологических процессов.

Как выбрать подходящий блок управления двигателем
При выборе блока управления асинхронным двигателем необходимо учитывать следующие параметры:
- Мощность и номинальный ток двигателя
- Требуемый диапазон регулирования скорости
- Необходимость реверса и торможения
- Условия эксплуатации (температура, влажность, вибрации)
- Требования к точности поддержания скорости
- Наличие специальных функций (плавный пуск, позиционирование и т.д.)
- Способ управления (местное, дистанционное, по сети)
Правильный выбор блока управления обеспечит надежную и эффективную работу электропривода.
Преимущества использования блоков управления двигателями переменного тока
Применение современных блоков управления асинхронными двигателями дает ряд важных преимуществ:
- Экономия электроэнергии за счет оптимизации режимов работы
- Повышение срока службы двигателей и механизмов
- Точное поддержание заданной скорости и момента
- Плавный пуск и остановка без перегрузок
- Защита двигателя от аварийных режимов
- Возможность удаленного управления и диагностики
- Снижение пусковых токов и нагрузки на сеть
Все это позволяет повысить эффективность и надежность работы электроприводов в различных отраслях промышленности.

Настройка и программирование блоков управления двигателями
Современные блоки управления асинхронными двигателями, особенно частотные преобразователи, имеют широкие возможности настройки и программирования. Это позволяет оптимально адаптировать работу электропривода под конкретную задачу.
Основные параметры, которые можно настроить в блоке управления:
- Характеристики разгона и торможения
- Ограничение тока и момента
- Способы регулирования скорости
- Работа на нескольких фиксированных скоростях
- Настройка защитных функций
- Логика работы дискретных входов/выходов
- Параметры обмена данными по промышленным сетям
Для сложных применений в блоках управления часто реализована возможность создания пользовательских программ на языках стандарта МЭК 61131-3.
Интеграция блоков управления в АСУ ТП
Современные блоки управления двигателями переменного тока имеют развитые коммуникационные возможности для интеграции в автоматизированные системы управления технологическими процессами (АСУ ТП). Это позволяет создавать распределенные системы управления электроприводами.

Основные способы интеграции блоков управления в АСУ ТП:
- Подключение по промышленным сетям (Modbus, Profibus, CANopen и др.)
- Использование программируемых логических контроллеров (ПЛК) для управления группой приводов
- Применение специализированных программ для настройки и мониторинга
- Интеграция в SCADA-системы для визуализации и диспетчерского управления
Это позволяет создавать гибкие и масштабируемые системы управления электроприводами в составе АСУ ТП предприятий.
Тенденции развития блоков управления двигателями переменного тока
Основные направления развития современных блоков управления асинхронными двигателями:
- Повышение энергоэффективности за счет применения алгоритмов векторного управления
- Расширение коммуникационных возможностей, поддержка промышленного интернета вещей (IIoT)
- Реализация функций предиктивной диагностики состояния двигателей
- Упрощение процесса настройки и ввода в эксплуатацию
- Повышение надежности и увеличение срока службы
- Миниатюризация и снижение стоимости устройств
Развитие блоков управления идет в направлении создания интеллектуальных устройств, способных оптимально управлять электроприводами в составе цифровых производств.

Блоки управления | Компания «ИТЭР-ГРУПП»
Блок управления асинхронным электродвигателем нерегулируемый нереверсивный (БНН).
Блок управления асинхронным электродвигателем нерегулируемый реверсивный (БНР) .
Блок управления асинхронным электродвигателем с пуском двигателя методом звезда-треугольник (БТЗ).
Блок автоматического ввода резерва (БАВР).
• Блоки рассчитаны для управления электродвигателями с номинальным током статора до 100А, при напряжении 380В переменного тока частотой 50 Гц.
Аппаратный состав.
В блоках в основном применяются отечественное оборудование:
• Автоматические выключатели типов АЕ1031, АЕ2036, АЕ2046, АЕ2056, ВА57-35;
• Магнитные пускатели типа ПМЛ1100…ПМЛ4100, ПМЛ1501…ПМЛ4500, ПМ12-100;
• Тепловые реле типа РТЛ, РТТ.
По требованию заказчика шкафы могут комплектоваться аппаратурой фирм ABB, Schneider, ИЭК и других.
Блоки управления, входящие в состав щита ЩУ-ЧЭ, можно разделить на три функциональные группы:
1. Блоки управления агрегатами (насосами, вентиляторами, задвижками). Блоки предназначены непосредственно для управления агрегатами и содержат всю необходимую пускозащитную аппаратуру (автоматический выключатель, магнитный пускатель, тепловое реле). Блок устанавливается для каждого агрегата. К этим блокам относятся блоки БНН, БНР, БРП, БТЗ. Блоки БНН, БНР, БТЗ работают автономно, блок БРП требует подключения к блоку регулирования БПЧ. Блоки могут управлять агрегатом как в местном режиме (кнопками на лицевой панели или на выносном кнопочном посте), так и в дистанционном (автоматическом) режиме под управлением системы автоматизации теплового пункта (система автоматизации подключается к клеммнику цепей управления блока). Выбор режима управления осуществляется переключателем на лицевой панели блока. Включение агрегата показывается лампой на лицевой панели.
2. Блок регулирования — блок БПЧ. Этот блок предназначен для регулирования частоты вращения электродвигателей. Блоки управления агрегатами (насосами, вентиляторами, задвижками). Блоки предназначены непосредственно для управления агрегатами и содержат всю необходимую пускозащитную аппаратуру (автоматический выключатель, магнитный пускатель, тепловое реле). Блок устанавливается для каждого агрегата. К этим блокам относятся блоки БНН, БНР, БРП, БТЗ. Блоки БНН, БНР, БТЗ работают автономно, блок БРП требует подключения к блоку регулирования БПЧ. Блоки могут управлять агрегатом как в местном режиме (кнопками на лицевой панели или на выносном кнопочном посте), так и в дистанционном (автоматическом) режиме под управлением системы автоматизации теплового пункта (система автоматизации подключается к клеммнику цепей управления блока). Выбор режима управления осуществляется переключателем на лицевой панели блока. Включение агрегата показывается лампой на лицевой панели.
2. Блок регулирования — блок БПЧ. Этот блок предназначен для регулирования частоты вращения электродвигателей. Блок содержит электронный регулирующий прибор – преобразователь частоты, силовую коммутационную аппаратуру и логическое устройство, управляющее работой преобразователя частоты и магнитных пускателей, а также осуществляющие контроль за исправностью преобразователя. Блок содержит электронный регулирующий прибор – преобразователь частоты, силовую коммутационную аппаратуру и логическое устройство, управляющее работой преобразователя частоты и магнитных пускателей, а также осуществляющие контроль за исправностью преобразователя.Блок БПЧ работает совместно с блоками БРП. Блок регулирования устанавливается один на группу насосных агрегатов. Блок обеспечивает работу насосного агрегата как в регулируемом режиме, так и в режиме прямого подключение к сети. Выбор режима производится как вручную переключателем на лицевой панели, так и автоматически при неисправности прибора регулирования. Режим работы агрегата отображается лампами на лицевой панели блока. Блоки регулирования не соединяются с системой автоматизации теплового пункта, все управляющие сигналы они получают от блоков управления (БРП). К блоку БПЧ производится подключение датчиков давления для обеспечения процесса регулирования давления. 3. Вспомогательные блоки. К этим блокам относится блок АВР. |
Лицевая панель блоков БПП, БРП, БТЗ
Лицевая панель блока БПЧ2 (на 2 насоса) |
 Устанавливается обычно в шкафу ШПЧ, один блок на весь тепловой пункт. Обеспечивает питанием систему автоматизации теплового пункта, пожарную электрозадвижку, цепи аварийного освещения.
Устанавливается обычно в шкафу ШПЧ, один блок на весь тепловой пункт. Обеспечивает питанием систему автоматизации теплового пункта, пожарную электрозадвижку, цепи аварийного освещения.
Блок управления асинхронным электродвигателем нерегулируемый нереверсивный (БНН) предназначен для управления механизмами с нереверсивными асинхронными электродвигателями (насосы, вентиляторы и т.п.). Блок обеспечивает защиту цепей электродвигателя от коротких замыканий (с помощью автоматического выключателя) и защиту от перегрузки по току (с помощью теплового реле). Блок обеспечивает управление электродвигателем в двух режимах – местном и дистанционном. В местном режиме управление осуществляется от кнопок на двери щита, в дистанционном – от системы автоматизации ЦТП.
Схема силовых цепей блока |
На переключателе выбора режима предусмотрен контакт, информирующий систему автоматизации ЦТП о выборе дистанционного режима управления. |
|
Схема подключения блока для работы с прибором «Мастер» |
Схема подключения блока для работы сприбором «Текон» |
|
Блок управления асинхронным электродвигателем нерегулируемый реверсивный (БНР) предназначен для управления механизмами с реверсивными асинхронными электродвигателями (электрозадвижки, регулирующие вентили и т.п.). Блок обеспечивает защиту цепей электродвигателя от коротких замыканий (с помощью автоматического выключателя) и защиту от перегрузки по току (с помощью теплового реле). Блок обеспечивает управление электродвигателем в двух режимах – местном и дистанционном. В местном режиме управление осуществляется от кнопок, установленных рядом с управляемым механизмом, в дистанционном – от системы автоматизации ЦТП. В схеме блока предусмотрена возможность подключения концевых выключателей, отключающих электродвигатель при достижении механизмом конечных положений.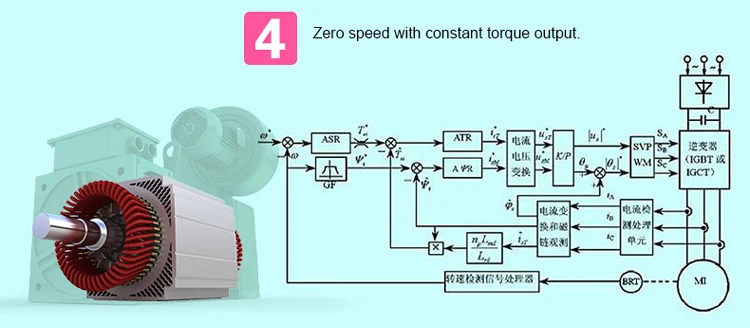 В схеме блока предусмотрено подключение выключателя безопасности, устанавливаемого рядом с управляемым электродвигателем.
В схеме блока предусмотрено подключение выключателя безопасности, устанавливаемого рядом с управляемым электродвигателем.
Схема силовых цепей блока |
Схема подключения блока для работы с прибором «Мастер», «Текон». Для прибора «Мастер» клеммы 12 и 13 не используются. |
Блок управления частотно-регулируемым электроприводом (БРП) предназначен для управления нереверсивными асинхронными электродвигателями (насосы, вентиляторы и т.п.) с возможностью регулирования частоты вращения управляемого электродвигателя. Блок предназначен для совместной работы с блоком управления преобразователем частоты (БПЧ). Блок обеспечивает защиту цепей электродвигателя от коротких замыканий (с помощью автоматического выключателя) и защиту от перегрузки по току (с помощью теплового реле), а также защиту цепей питания преобразователя частоты (с помощью автоматического выключателя). Блок обеспечивает управление электродвигателем в двух режимах – местном и дистанционном. В местном режиме управление осуществляется от кнопок на двери щита (имеется возможность включения насоса в регулируемом и нерегулируемом режиме), в дистанционном – от системы автоматизации ЦТП. На переключателе выбора режима предусмотрен контакт, информирующий систему автоматизации ЦТП о выборе дистанционного режима управления. В схеме блока предусмотрено подключение выключателя безопасности, устанавливаемого рядом с управляемым электродвигателем.
Блок обеспечивает управление электродвигателем в двух режимах – местном и дистанционном. В местном режиме управление осуществляется от кнопок на двери щита (имеется возможность включения насоса в регулируемом и нерегулируемом режиме), в дистанционном – от системы автоматизации ЦТП. На переключателе выбора режима предусмотрен контакт, информирующий систему автоматизации ЦТП о выборе дистанционного режима управления. В схеме блока предусмотрено подключение выключателя безопасности, устанавливаемого рядом с управляемым электродвигателем.
Схема силовых цепей блока |
Схема подключения блока для работы с прибором «Мастер» |
Схема подключения блока для работы с прибором «Текон» |
Блок управления преобразователем частоты (БПЧ) предназначен для регулирования частоты вращения асинхронного электродвигателя путем изменения величины и частоты подаваемого на электродвигатель напряжения.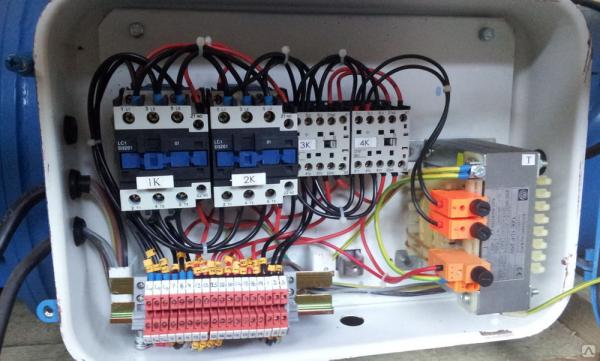 Блок устанавливается один на группу насосных агрегатов (ХВС, ГВС или ЦНО) и работает совместно с блоками управления частотно-регулируемым электроприводом (БРП). Блок обеспечивает регулирование частоты электродвигателя в зависимости от давления на выходе группы насосных агрегатов (ХВС, ГВС) или перепада давления на насосном агрегате (ЦНО). Задание требуемого давления (перепада) осуществляется с помощью цифро-аналогового задатчика, установленного на двери щита. В схеме блока предусмотрена возможность переключения электродвигателя в нерегулируемый режим при неисправности преобразователя частоты. Включение насоса в нерегулируемом режиме отображается лампой на двери щита.
Блок устанавливается один на группу насосных агрегатов (ХВС, ГВС или ЦНО) и работает совместно с блоками управления частотно-регулируемым электроприводом (БРП). Блок обеспечивает регулирование частоты электродвигателя в зависимости от давления на выходе группы насосных агрегатов (ХВС, ГВС) или перепада давления на насосном агрегате (ЦНО). Задание требуемого давления (перепада) осуществляется с помощью цифро-аналогового задатчика, установленного на двери щита. В схеме блока предусмотрена возможность переключения электродвигателя в нерегулируемый режим при неисправности преобразователя частоты. Включение насоса в нерегулируемом режиме отображается лампой на двери щита.
Схема силовых цепей блока БПЧ2 (на 2 насоса)
|
Схема подключения блока БПЧ2 (на 2 насоса) |
Схема силовых цепей блока БПЧ3 (на 3 насоса) |
Схема подключения блока БПЧ3 (на 3 насоса) |
Для насосов ХВС, ГВС, пожарных и т. п. устанавливается один датчик давления на группу. Он подключается к клеммам 21(+), 22(-) блока БПЧ2, 31(+), 32(-) блока БПЧ3.
п. устанавливается один датчик давления на группу. Он подключается к клеммам 21(+), 22(-) блока БПЧ2, 31(+), 32(-) блока БПЧ3.
Для насосов ЦНО устанавливается два датчика давления – на входе и выходе группы насосных агрегатов. Датчик на выходе насосов подключается к клеммам 21(+), 22(-) блока БПЧ2, 31(+), 32(-) блока БПЧ3, датчик на входе насосов подключается к клеммам 23 (+), 24(-) блока БПЧ2, 33(+), 34(-) блока БПЧ3.
Блок управления асинхронным электродвигателем с пуском двигателя методом звезда-треугольник (БТЗ).
Схема силовых цепей блока |
Блок аналогичен блоку БНН, но имеет дополнительный магнитный пускатель, осуществляющий перекоммутацию обмоток электродвигателя со звезды на треугольник в процессе разгона через заданную выдержку времени (1..30сек).
Применяется для электродвигателей, рассчитанных на напряжение 380/660В — например, по требованию фирмы Grundfos, насосы мощностью 5,5кВт и более должны пускаться методом звезда-треугольник. |
|
Схема подключения блока для работы с прибором «Мастер» |
Схема подключения блока для работы с прибором «Текон» |
|

Блок автоматического ввода резерва (БАВР) предназначен для автоматического переключения нагрузки на резервный ввод при неисправности (исчезновение напряжение, обрыв одной из фаз, неправильное чередование фаз) основного. Блок устанавливается в шкафу ШПЧ, в шкафах РШУ-1 и РШУ-2 устанавливаются автоматические выключатели, к которым подключают вводные линии блока.
Внешний вид блока |
Блоки БНН и БРП имеют дополнительные исполнения:
• БНН-Т и БРП-Т — в типовые блоки добавлен модуль позисторной защиты (электронный блок, отключающий насос при перегреве термодатчика, встроенного в обмотки двигателя; применяется с насосами Grundfos).
• БНН-П и БРП-П — в типовые блоки добавлено устройство плавного пуска электродвигателя (для БРП — в цепь работы насоса от сети).
• БНН-ПТ и БРП-ПТ — в блоки добавлены и модуль позисторной защиты и устройство плавного пуска.
Параметры блоков управления БНН, БРП и БНР приведены в таблице:
| Типовой индекс | Мощность подключаемого двигателя, кВт | Номинальный ток, А | Пределы регулирования теплового реле | Автоматический выключатель | Пускатель | Тепловое реле |
| 01 | 0,18 | 0,66 | 0,61-1 | AE2036M 1,6А | ПМЛ1100 | РТЛ-1005 |
| 02 | 0,37 | 1,2 | 0,95-1,6 | AE2036M 2А | ПМЛ1100 | РТЛ-1006 |
| 03 | 0,75 | 1,7 | 1,5-2,6 | AE2036M 3,15А | ПМЛ1100 | РТЛ-1007 |
| 03 | 1,5 | 3 | 2,4-4 | AE2036M 4А | ПМЛ1100 | РТЛ-1008 |
| 05 | 2,2 | 5 | 3,8-6 | AE2036M 8А | ПМЛ1100 | РТЛ-1010 |
| 06 | 3,0 | 6 | 5,5-8 | AE2036M 8А | ПМЛ1100 | РТЛ-1012 |
| 07 | 4,0 | 8 | 7-10 | AE2036M 10А | ПМЛ1100 | РТЛ-1014 |
| 08 | 5,5 | 11 | 9,5-14 | AE2036M 16А | ПМЛ1100 | РТЛ-1016 |
| 09 | 7,5 | 15 | 13-19 | AE2036M 20А | ПМЛ2100 | РТЛ-1021 |
| 10 | 11,0 | 21 | 18-25 | AE2046M 31,5А | ПМЛ2100 | РТЛ-1022 |
| 11 | 15,0 | 29 | 23-32 | AE2046M 40А | ПМЛ3100 | РТЛ-2053 |
| 12 | 18,5 | 36 | 30-41 | AE2046M 50А | ПМЛ3100 | РТЛ-2055 |
| 13 | 22,0 | 43 | 38-52 | AE2046M 63А | ПМЛ4100 | РТЛ-2057 |
| 14 | 25,0 | 49 | 47-64 | AE2046M 63А | ПМЛ4100 | РТЛ-2059 |
| 15 | 30,0 | 59 | 54-74 | AE2056MM 80А | ПМЛ4100 | РТЛ-2061 |
| 16 | 37,0 | 73 | 75 |
ВА57-35 100А |
ПМ 12-100 | РТТ-ЗП |
| 17 | 45,0 | 90 | 100 | ВА57-35 125А | ПМ 12-100 | РТТ-ЗП |
В данной таблице указана пуско-защитная аппаратура отечественного производства.
Блок управления коллекторными двигателями BMSD
- ГЛАВНАЯ
- ПРОДУКЦИЯ
- ПУБЛИКАЦИИ
- КОНТАКТЫ
(812) 703-09-81 (499) 642-60-67
Главная » Продукция » Блоки управления коллекторными двигателями постоянного тока » BMSD
< Вернуться к выбору блоков управления
Блок управления коллекторными двигателями BMSD
| Параметр | Значение |
| Напряжение питания | 7…24В пост.тока |
| Напряжение на двигателе | <0,98 Uпит |
| Рабочий ток двигателя | <12А |
| Защита от перегрузки | <16А |
| Размеры | 22x61x127мм |
| RS-485 | |
| стабилизация скорости | |
Блок BMSD предназначен для управления коллекторными двигателями постоянного тока с энкодером на основе Датчика Холла или без обратной связи. Блок работает в автономном режиме, либо управление по интерфейсу RS-485. Связь блока с ПК осуществляется по интерфейсу RS485.
Блок управляет скоростью, направлением и активным торможением мотор-редукторов постоянного тока с номинальным током до 12А.Обеспечивает плавный пуск и остановку двигателя.
Блок работает в автономном режиме, либо управление по интерфейсу RS-485. Связь блока с ПК осуществляется по интерфейсу RS485.
Блок управляет скоростью, направлением и активным торможением мотор-редукторов постоянного тока с номинальным током до 12А.Обеспечивает плавный пуск и остановку двигателя.
Управление скоростью:
Управление скоростью двигателя без обратной связи производится без стабилизации. Стабилизация скорости осуществляется при управлении двигателем с энкодером.
Способы регулирования скорости:
- аналоговым сигналом
— напряжение: 0 — 5В
— сопротивление: 1-10 кОм - встроенным потенциометром
- по интерфейсу RS-485
Управление направлением:
Направление вращения в момент запуска зависит от полярности подключения двигателя к блоку. В ходе работы направление вращения меняется сигналом «Направление» — типа сухой контакт в ручном режиме, либо командой при управлении по RS-485.
В ходе работы направление вращения меняется сигналом «Направление» — типа сухой контакт в ручном режиме, либо командой при управлении по RS-485.
Управление ускорением и торможением:
Плавный пуск и плавная остановка двигателя задаются подстроечными резисторами «Ускорение» и «Торможение» в ручном режиме, либо командами при управлении по RS-485.
Управление по интерфейсу RS-485:
- Скоростью
- Продолжительностью работы или количеством оборотов
- Направлением
- Производится контроль положения при управлении двигателем с энкодером.
- Ускорением
- Предусмотрено одновременное управление несколькими блоками и адресная подача команд
Регулятор скорости переменного тока
Загрузить PDF
«Комплект двигателя переменного тока и регулятора скорости» представляет собой модуль, состоящий из надежного однофазного асинхронного двигателя и малошумного регулятора скорости с длительным сроком службы. Серия DSC — это новый продукт для управления скоростью переменного тока. Для повышения удобства использования этот продукт оснащен панелью управления для контроля различных функций, а также для цифровых настроек. Новая технология управления DSC также выполняет две функции, недоступные обычным продуктам; мгновенное реверсирование однофазных асинхронных двигателей и вертикальный привод за счет управления замедлением (только с электромагнитным тормозом).
Серия DSC — это новый продукт для управления скоростью переменного тока. Для повышения удобства использования этот продукт оснащен панелью управления для контроля различных функций, а также для цифровых настроек. Новая технология управления DSC также выполняет две функции, недоступные обычным продуктам; мгновенное реверсирование однофазных асинхронных двигателей и вертикальный привод за счет управления замедлением (только с электромагнитным тормозом).
В этой статье описываются функции и новая технология управления серии DSC.
1. Введение
«Комплект двигателя переменного тока и регулятора скорости» представляет собой упакованный продукт, состоящий из надежного двигателя переменного тока и компактного, малошумного и долговечного регулятора скорости (1), обеспечивающего стабильное регулирование скорости при изменении прикладываемое напряжение к асинхронному двигателю с системой фазового контроля. За последние 40 лет компания Oriental Motor разработала множество двигателей переменного тока с регулированием скорости, удовлетворяя при этом потребности рынка. Эти двигатели использовались в качестве источников питания для различных видов промышленных устройств.
Эти двигатели использовались в качестве источников питания для различных видов промышленных устройств.
В этой статье представлены функции и технологии управления серии DSC.
2. Особенности серии DSC
Серия DSC представляет собой электродвигатель переменного тока с регулированием скорости, который обеспечивает высокую надежность за счет управления с обратной связью, а также позволяет уменьшить размеры регулятора скорости за счет оцифровки схемы фазового управления. Отличные характеристики стабильности скорости с очень небольшими колебаниями скорости достигаются благодаря регулированию скорости относительно нагрузки ±1% или менее (эталонное значение). Кроме того, благодаря системе управления фазой, эта серия имеет более низкий уровень шума по сравнению с обычными продуктами с инверторным управлением. Ассортимент продукции серии DSC указан в таблице 1.
Основные характеристики серии DSC указаны ниже:
1) Встроенная панель управления на контроллере (см. рис. 2) 4 скорости, выполнение различных типов мониторинга, настройка параметров и тестовая работа.
рис. 2) 4 скорости, выполнение различных типов мониторинга, настройка параметров и тестовая работа.
2) Мгновенные двунаправленные операции стали возможными благодаря асинхронному двигателю
В прошлом для мгновенных двунаправленных операций требовались реверсивные двигатели, что ограничивало время работы. Благодаря новым технологиям управления серия DSC обеспечивает мгновенную двунаправленную работу с помощью асинхронного двигателя, что делает возможной непрерывную работу (см. рис. 3).
3) Возможен гравитационный и вертикальный режим (электромагнитный тормоз) для контроля тормозной силы (тормозящего момента).
Кроме того, благодаря возможности управления тормозным моментом можно выполнять остановку замедлением в качестве настройки времени торможения даже при остановке нагрузок с высокой инерцией. Обычные двигатели не могли выполнить остановку замедлением короче, чем требовалось время, в течение которого двигатель останавливался выбегом (Примечание 2).
Торможение тормозным током не требует блока регенерации. При простой конфигурации системы возможны гравитационные и вертикальные операции (см. рис. 4).
4) Простая проводка и подключение
Простая проводка и подключение возможны благодаря безвинтовому соединителю для линии питания и соединителю между двигателем и контроллером (см. рис. 5).
5) Оснащен улучшенными функциями удобства использования
• Функции для настройки и управления скоростью
Установите значения управления скоростью с помощью встроенной клавиатуры на лицевой панели контроллера и выберите с помощью внешнего напряжения постоянного тока. Для ручного управления скоростью можно использовать внешний потенциометр скорости.
• Функция для простой регулировки разницы скоростей
При параллельной работе двигателей
Одной внешней командой скорости можно управлять параллельно до 20 двигателей. Во время работы с параллельным двигателем, когда каждый двигатель имеет разность скоростей, эту разность скоростей можно легко отрегулировать с помощью параметра «External Speed Command Off-Set».
• Функция ограничения диапазона настройки скорости
Непреднамеренной операции настройки скорости можно избежать, используя параметр «Верхний и нижний пределы скорости», чтобы заранее ограничить диапазон настройки скорости.
• Функция блокировки редактирования данных
Редактирование данных можно заблокировать, удерживая клавишу MODE на панели управления. Во время блокировки все операции настройки отключены, и, таким образом, можно избежать неправильных операций, таких как случайная перезапись или удаление данных.
6) Сочетание высоконадежного двигателя и редуктора
В этой серии используются двигатель и редуктор серии KII, которые обеспечивают отличный допустимый крутящий момент и прочность. Эта комбинация позволяет добиться таких улучшений, как уменьшение размеров оборудования и повышение его надежности.
3. Технологии замкнутого цикла серии DSC
3.1. Basic Control Technologies
Двигатель переменного тока с регулятором скорости оснащен тахогенератором для определения скорости. Тахогенератор вырабатывает 12-периодную синусоидальную волну однофазного переменного напряжения за 1 оборот. Он преобразуется в импульсные сигналы для определения скорости двигателя. Из-за однофазного переменного напряжения он не может определить направление вращения (см. рис. 7).
Тахогенератор вырабатывает 12-периодную синусоидальную волну однофазного переменного напряжения за 1 оборот. Он преобразуется в импульсные сигналы для определения скорости двигателя. Из-за однофазного переменного напряжения он не может определить направление вращения (см. рис. 7).
Регулятор скорости регулирует величину подаваемого на двигатель напряжения с помощью фазового управления, чтобы установить заданную скорость и скорость двигателя одинаковыми (см. рис. 8).
Полупроводниковые устройства TRIAC используются для управления фазой. На рис. 9 показана конфигурация схемы управления фазой. Прикладываемое к двигателю напряжение регулируется путем управления углами зажигания симистора. Встроенные симисторные устройства выполняют функции управления и торможения. При включении симистора для торможения во время мгновенной остановки постоянный тормозной ток подается на обмотки двигателя для создания тормозящего момента.
3.2. Технологии управления для мгновенного двунаправленного срабатывания
Обычные асинхронные двигатели должны сначала остановить двигатель для выполнения мгновенных двунаправленных операций. Это связано с тем, что в характеристиках скорость-момент асинхронных двигателей существует отрицательный диапазон крутящего момента (см. рис. 10). По этой причине, даже если вращающееся магнитное поле было реверсивным, были времена, когда двигатель не мог реверсировать при использовании с небольшой фрикционной нагрузкой. Поэтому в прошлом было необходимо использовать реверсивные двигатели при выполнении мгновенных двунаправленных операций.
Это связано с тем, что в характеристиках скорость-момент асинхронных двигателей существует отрицательный диапазон крутящего момента (см. рис. 10). По этой причине, даже если вращающееся магнитное поле было реверсивным, были времена, когда двигатель не мог реверсировать при использовании с небольшой фрикционной нагрузкой. Поэтому в прошлом было необходимо использовать реверсивные двигатели при выполнении мгновенных двунаправленных операций.
Реверсивные двигатели увеличивают пусковой крутящий момент за счет повышения емкости комбинированного фазоопережающего конденсатора, подстраиваясь под характеристику скорость-крутящий момент без отрицательного диапазона крутящего момента. Следовательно, реверсивные двигатели неэффективны с точки зрения КПД двигателя, и существует ограничение на время работы. Кроме того, они оснащены фрикционным тормозом, чтобы сократить время, необходимое для реверса, и уменьшить перебег при остановке двигателя. В таблице 2 показано сравнение асинхронных и реверсивных двигателей.
Серия DSC автоматически пропускает тормозной ток на короткое время во время мгновенных двунаправленных операций. После замедления до скорости без отрицательного диапазона крутящего момента вращающееся магнитное поле меняется на противоположное, что позволяет выполнять мгновенные двунаправленные операции с помощью асинхронного двигателя (см. рис. 11). Поскольку в этой серии используется асинхронный двигатель, возможна непрерывная работа.
Однако, поскольку больший ток по сравнению с нормальной работой протекает в направлении, противоположном току торможения для запуска двигателя во время мгновенных двунаправленных операций, выделяется больше тепла по сравнению с однонаправленными непрерывными операциями. По этой причине защита от перегрева (Примечание 3) для двигателей может активироваться при частом повторении мгновенных двунаправленных операций. При работе в повторяющемся цикле, как показано на рис. 12, мгновенные двунаправленные операции могут выполняться без проблем. В условиях эксплуатации температура корпуса двигателя ниже 90°C (194°F) возможны мгновенные двунаправленные операции, даже если повторяющийся цикл короче.
В условиях эксплуатации температура корпуса двигателя ниже 90°C (194°F) возможны мгновенные двунаправленные операции, даже если повторяющийся цикл короче.
3.3. Технологии управления тормозным моментом (с электромагнитным тормозом)
3.3.1. Система управления замедлением
Для регулировки скорости обычный метод управления скоростью повышает приложенное напряжение двигателя, когда скорость ниже заданной скорости, и снижает приложенное напряжение, когда скорость выше заданной. Следовательно, для использования, такого как гравитационная операция, когда выходной вал двигателя вращается из-за внешней силы, двигатель продолжает ускоряться независимо от того, скорость двигателя выше заданной скорости, в то время как приложенное напряжение снижается. В конце концов, это переводит двигатель в состояние без возбуждения, в котором нет приложенного напряжения двигателя. Другими словами, этот метод управления скоростью не может выводить тормозной момент на более низкую скорость.
Серия DSC использует систему управления замедлением, которая управляет крутящим моментом замедления, выдавая крутящий момент торможения через тормозной ток, когда скорость превышает установленную скорость. Когда активирована система управления замедлением, величина тормозного тока регулируется фазовым управлением, которое регулирует скорость для поддержания заданной скорости, подавляя при этом внешнее усилие, чтобы остановить вращение вала (см. рис. 13).
При выборе «ВКЛ» симистора для работы выводится крутящий момент, а при выборе «ВКЛ» симистора для торможения выводится тормозной момент (см. рис. 9).). Скорость двигателя регулируется путем определения того, какой TRIAC должен быть включен (см. рис. 14).
Таким образом, управление скоростью позволяет двигателям работать в соответствии с заданной скоростью даже во время гравитационного режима.
Поскольку тормозной момент контролируется системой управления замедлением, двигатели могут замедляться до остановки в течение заданного времени торможения, даже при остановке высокоинерционных нагрузок. Обычные двигатели не могли выдавать тормозящий момент и, следовательно, они не могли выполнять остановку замедлением, если время меньше, чем требуется для остановки по инерции (см. рис. 15 и 16).
Обычные двигатели не могли выдавать тормозящий момент и, следовательно, они не могли выполнять остановку замедлением, если время меньше, чем требуется для остановки по инерции (см. рис. 15 и 16).
Кроме того, при методе вывода крутящего момента замедления через систему управления замедлением регенеративное напряжение не генерируется внутри контроллера. По этой причине не требуется установка регенерации, позволяющая выполнять гравитационные и вертикальные операции при простой конфигурации системы.
3.3.2. Ограничение времени работы
Система управления замедлением реализуется при подаче тормозного тока. При продолжении работы под управлением системы управления замедлением двигатель может выделять значительное количество тепла, что приводит к срабатыванию защиты двигателя от перегрева. Поэтому существуют ограничения по времени работы и рабочему режиму во время гравитационных и вертикальных операций (см. рис. 17). Для типа 6 Вт ограничений нет. В условиях эксплуатации температура корпуса двигателя ниже 90°C (194°F), например, когда рабочая температура двигателя низкая, возможны операции с более длительным временем работы и режимы работы с коротким временем остановки.
3.3.3. Допустимый крутящий момент при работе в гравитационном и вертикальном режимах
Как указано в разделе 3.1, информация о направлении вращения не может быть получена методом определения скорости с помощью тахогенератора. Следовательно, когда в направлении вверх приводится в движение нагрузка, превышающая крутящий момент двигателя, возможно, что двигатель может начать движение в направлении, противоположном заданному направлению. Чтобы избежать таких ситуаций, допустимые характеристики крутящего момента предусмотрены для конкретного использования, когда выходной вал двигателя вращается под действием внешней силы, такой как сила тяжести или вертикальные операции. Кроме того, чем больше нагрузка, тем больше ток торможения прикладывается во время гравитационного режима. Допустимые характеристики крутящего момента устанавливаются с учетом тепловыделения двигателя. Поскольку допустимые характеристики крутящего момента устанавливаются для каждого передаточного числа, подходящий двигатель можно выбрать, обращаясь к веб-сайту или каталогам Oriental Motor.
3.3.4. Параметр «Управление замедлением»
Указанная в статье система управления замедлением функционирует при включении встроенного параметра «Управление замедлением» (начальное значение). В таблице 3 показаны различия в диапазоне настройки из-за ВКЛ/ВЫКЛ параметра «управление замедлением». Причина, по которой диапазон настройки скорости и времени разгона/торможения сужается при выборе ON, заключается в выполнении точных гравитационных/вертикальных операций. Если выходной вал двигателя не вращается внешней силой, можно расширить диапазон настройки скорости, отключив функцию в параметре «управление замедлением». Пожалуйста, выберите настройку в зависимости от условий эксплуатации.
4. Резюме
В этой статье описаны функции и технологии управления серии DSC, которые позволяют выполнять гравитационные и вертикальные операции. Благодаря панели управления, встроенной в контроллер, серия DSC очень удобна в использовании, а также оснащена отличным контролем скорости и функциями.
Возможность выполнения различных операций значительно расширила возможности применения асинхронных двигателей. Мы настоятельно рекомендуем вам учитывать этот продукт при проектировании вашего оборудования.
Справочная литература
(1) Масахиро Такимото, «Характеристики и технологии управления регулятором скорости MSC-1», RENGA, № 176, (2012), стр. 14–20
(Примечание 1) При полу- Волновое выпрямление Постоянная составляющая тока подается по одной фазе на основную и вспомогательную обмотки двигателя, создается тормозное усилие. Эта составляющая постоянного тока однополупериодного выпрямления называется током торможения.
(Примечание 2) Это когда на двигатель не подается напряжение, и двигатель останавливается в состоянии отсутствия возбуждения. Время, необходимое двигателю для остановки по инерции, соответствует сумме инерционных и фрикционных нагрузок.
(Примечание 3) Тип 6W имеет защиту от импеданса. Хотя двигатель не останавливается из-за выделяемого тепла, используйте двигатель в соответствии с инструкциями в этой статье, чтобы не сократить срок службы двигателя.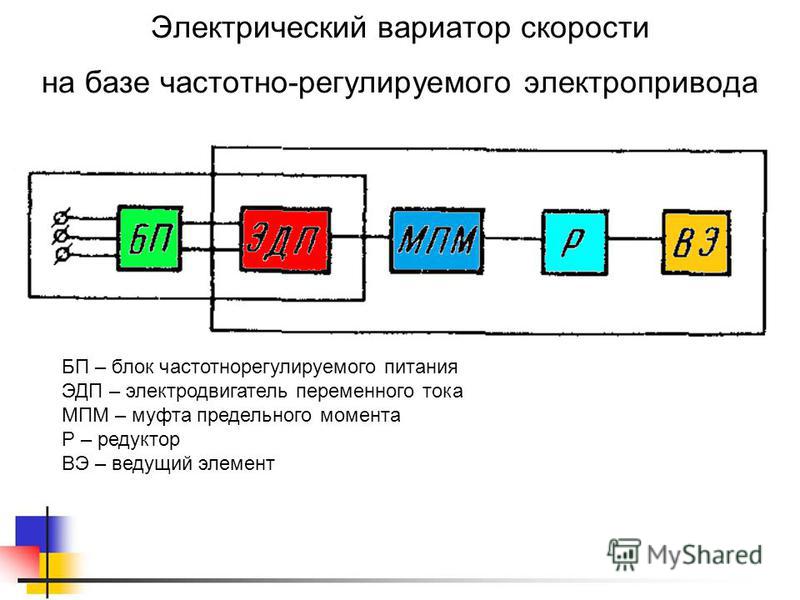 Тип 15-90 Вт защищен тепловой защитой, поэтому двигатель остановится, пока функция активирована.
Тип 15-90 Вт защищен тепловой защитой, поэтому двигатель остановится, пока функция активирована.
Контроллеры двигателей | Curtis Instruments
AC F2-A
Этот контроллер двигателя переменного тока использует два высокопроизводительных микропроцессора ARM Cortex в компактном корпусе для обеспечения непревзойденной производительности и очень гибкого набора функций.
Модель AC F2-A оптимизирована для использования в качестве контроллера тяги на гидравлических тележках класса III грузоподъемностью 1,0–2,0 тонны. Контроллер также подходит для управления тягой или гидравлическим насосом на других типах транспортных средств с аккумуляторным питанием. Разработчики транспортных средств могут определять и контролировать динамические характеристики трансмиссии транспортных средств. Модель AC F2-A также является мощным системным контроллером, который может работать в качестве управляющего устройства на шине CAN.
Тип двигателя
Индукция переменного тока
PMAC
Бесщеточный DC (BLDC)
Применение/Функция
Тяга
Насос
Диапазон номинального напряжения (В постоянного тока)
12 В
24 В
36 В
48 В
Максимальный ток
240Arms
AC F2-C
Curtis Model AC F2-C представляет собой интегрированный контроллер системы тяги переменного и постоянного тока. Этот контроллер двигателя переменного тока F2-C (инвертор) в сочетании с полумостовым гидравлическим насосом постоянного тока и системой управления пропорциональным клапаном использует двойной высокий уровень 9.0007
производительность Микропроцессоры ARM Cortex в компактном корпусе обеспечивают непревзойденную производительность и очень гибкий набор функций.
Этот контроллер двигателя переменного тока F2-C (инвертор) в сочетании с полумостовым гидравлическим насосом постоянного тока и системой управления пропорциональным клапаном использует двойной высокий уровень 9.0007
производительность Микропроцессоры ARM Cortex в компактном корпусе обеспечивают непревзойденную производительность и очень гибкий набор функций.
Тип двигателя
Индукция переменного тока
PMAC
Бесщеточный постоянный ток (BLDC)
Применение/Функция
Traction
Комбинированный насос переменного тока и насоса постоянного тока
Диапазон номинального напряжения (В постоянного тока)
24 В
36 В
48 В
Максимальный ток
280Arms-280A
AC F2-T/AC F2-D
Модель Curtis AC F2-T объединяет три отдельных контроллера двигателя в компактном прочном устройстве. AC F2-T обеспечивает независимое управление двумя асинхронными двигателями переменного тока или тяговыми двигателями PMAC, а также управление двигателем гидравлического насоса постоянного тока. Curtis Model AC F2-D предлагает версию только с двойной тягой без управления насосом постоянного тока.
Curtis Model AC F2-D предлагает версию только с двойной тягой без управления насосом постоянного тока.
Тип двигателя
Индукция переменного тока
PMAC
Бесщеточный DC (BLDC)
Применение/Функция
Traction
Комбинированный насос переменного тока и насоса постоянного тока
Диапазон номинального напряжения (В постоянного тока)
24 В
36 В
48 В
Максимальный ток
240Arms+280A
AC F4-A
Контроллер двигателя Curtis модели AC F4-A обеспечивает точное управление скоростью и крутящим моментом трехфазных асинхронных двигателей переменного тока и двигателей PMAC.
AC F4-A использует два высокопроизводительных микропроцессора ARM Cortex для обеспечения максимально возможного уровня функциональной безопасности, обеспечивая при этом высокоэффективное управление двигателем и гибкие возможности управления системой.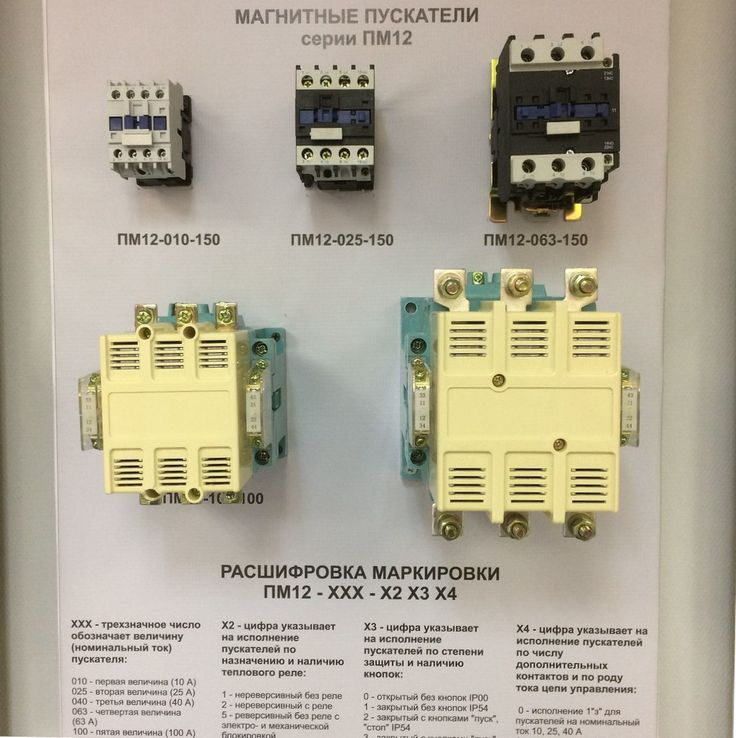
Тип двигателя
Индукция переменного тока
PMAC
Бесщеточный постоянный ток (BLDC)
Применение/Функция
Тяга
Насос
Диапазон номинального напряжения (В постоянного тока)
24В
36 В
48 В
60 В
72 В
80 В
84 В
96 В
Максимальный ток
500Arms
AC F6-A
Контроллер двигателя Curtis модели AC F6-A обеспечивает точное управление скоростью и крутящим моментом трехфазных асинхронных двигателей переменного тока, двигателей переменного тока и двигателей постоянного тока с постоянным током.
AC F6-A использует два высокопроизводительных микропроцессора ARM Cortex для обеспечения максимально возможного уровня функциональной безопасности, обеспечивая при этом высокоэффективное управление двигателем и гибкие возможности управления системой.
Тип двигателя
Индукция переменного тока
PMAC
Бесщеточный постоянный ток (BLDC)
Применение/Функция
Тяга
Насос
Диапазон номинального напряжения (В постоянного тока)
12 В
24 В
36 В
48 В
60 В
72 В
80 В
84 В
96 В
Максимальный ток
450Армс-650Армс
HVi F5-R
Контроллер двигателя переменного тока Curtis модели HVi F5-R имеет диапазон рабочего напряжения 150–525 В, пиковую мощность 200 А и непрерывную мощность 100 А. Модель HVi F5-R обеспечивает точное управление скоростью и крутящим моментом трехфазных асинхронных двигателей переменного тока и двигателей PMAC.
Модель HVi F5-R обеспечивает точное управление скоростью и крутящим моментом трехфазных асинхронных двигателей переменного тока и двигателей PMAC.
HVi F5-R имеет архитектуру категории 2 функциональной безопасности. Контроллер предназначен для гибридных систем с электрической тягой, гидравлическим насосом и генератором на двигателе (OEG) в мобильном оборудовании, таком как погрузочно-разгрузочные машины, мобильные подъемные рабочие платформы, наземная поддержка аэропортов и строительная техника.
Тип двигателя
Индукция переменного тока
PMAC
Применение/Функция
Тяга
Насос
Диапазон номинального напряжения (В постоянного тока)
200 В постоянного тока+
Максимальный ток
200A
1222
Модель Curtis 1222 представляет собой контроллер асинхронного двигателя переменного тока для систем рулевого управления с электроусилителем, управляемых по проводам. В этих системах двигатель рулевого управления функционирует как исполнительный механизм для изменения угла поворота управляемого колеса (колес) транспортного средства и, таким образом, изменения направления движения.
В этих системах двигатель рулевого управления функционирует как исполнительный механизм для изменения угла поворота управляемого колеса (колес) транспортного средства и, таким образом, изменения направления движения.
Тип двигателя
Индукция переменного тока
Применение/Функция
Электронный усилитель рулевого управления (EPS)
Диапазон номинального напряжения (В постоянного тока)
24 В
36 В
48 В
60 В
72 В
80 В
Максимальный ток
70Arms
1232E
Модель Curtis 1232E обеспечивает расширенное управление асинхронными двигателями переменного тока, выполняющими функции тягового привода или гидравлического насоса, и обеспечивает высочайший уровень функциональной безопасности.
Тип двигателя
Индукция переменного тока
PMAC
Применение/Функция
Тяга
Насос
Диапазон номинального напряжения (В постоянного тока)
24 В
36 В
48 В
60 В
72 В
80 В
84 В
96 В
Максимальный ток
150Arms
1232SE
В контроллерах переменного тока Curtis ‘SE’ используются новейшие технологии для увеличения номинального пикового тока для каждого размера контроллера. Для данного рейтинга модели SE меньше и дешевле, чем предыдущие контроллеры переменного тока Curtis, что является очень выгодным для всех типов приложений.
Для данного рейтинга модели SE меньше и дешевле, чем предыдущие контроллеры переменного тока Curtis, что является очень выгодным для всех типов приложений.
Тип двигателя
Индукция переменного тока
PMAC
Применение/Функция
Тяга
Насос
Диапазон номинального напряжения (В постоянного тока)
24 В
36 В
48 В
60 В
72 В
80 В
Максимальный ток
375Arms
1234E
Модель Curtis 1234E обеспечивает расширенное управление асинхронными двигателями переменного тока, выполняющими функции тягового привода или гидравлического насоса, и обеспечивает высочайший уровень функциональной безопасности
Тип двигателя
Индукция переменного тока
Применение/Функция
Тяга
Насос
Диапазон номинального напряжения (В постоянного тока)
24 В
36 В
48 В
60 В
72 В
80 В
Максимальный ток
250Arms
1234SE
В контроллерах переменного тока Curtis ‘SE’ используются новейшие технологии для увеличения номинального пикового тока для каждого размера контроллера. Для данного рейтинга модели SE меньше и дешевле, чем предыдущие контроллеры переменного тока Curtis, что является очень выгодным для всех типов приложений.
Для данного рейтинга модели SE меньше и дешевле, чем предыдущие контроллеры переменного тока Curtis, что является очень выгодным для всех типов приложений.
Тип двигателя
Индукция переменного тока
PMAC
Применение/Функция
Тяга
Насос
Диапазон номинального напряжения (В постоянного тока)
24 В
36 В
48 В
60 В
72 В
80 В
Максимальный ток
500Arms
1236E
Модели Curtis 1236E и 1238E обеспечивают улучшенное управление асинхронными двигателями переменного тока, выполняющими функции тягового привода или гидравлического насоса. Они предлагают разработчикам транспортных средств очень экономичное сочетание мощности, производительности и функциональности
Тип двигателя
Индукция переменного тока
Применение/Функция
Тяга
Насос
Диапазон номинального напряжения (В постоянного тока)
24 В
36 В
48 В
60 В
72 В
80 В
Максимальный ток
350Arms
1236SE
В контроллерах переменного тока Curtis ‘SE’ используются новейшие технологии для увеличения номинального пикового тока для каждого размера контроллера. Для данного рейтинга модели SE меньше и дешевле, чем предыдущие контроллеры переменного тока Curtis, что является очень выгодным для всех типов приложений.
Для данного рейтинга модели SE меньше и дешевле, чем предыдущие контроллеры переменного тока Curtis, что является очень выгодным для всех типов приложений.
Тип двигателя
Индукция переменного тока
PMAC
Применение/Функция
Тяга
Насос
Диапазон номинального напряжения (В постоянного тока)
24 В
36 В
48 В
60 В
72 В
80 В
Максимальный ток
650Arms
1238E
Модели Curtis 1236E и 1238E обеспечивают улучшенное управление асинхронными двигателями переменного тока, выполняющими функции тягового привода автомобиля или гидравлического насоса. Они предлагают разработчикам транспортных средств очень экономичное сочетание мощности, производительности и функциональности.
Тип двигателя
Индукция переменного тока
Применение/Функция
Тяга
Насос
Диапазон номинального напряжения (В постоянного тока)
24 В
36 В
48 В
60 В
72 В
80 В
84 В
96 В
Максимальный ток
800Arms
1238SE
В контроллерах переменного тока Curtis ‘SE’ используются новейшие технологии для увеличения номинального пикового тока для каждого размера контроллера. Для данного рейтинга модели SE меньше и дешевле, чем предыдущие контроллеры переменного тока Curtis, что является очень выгодным для всех типов приложений.
Для данного рейтинга модели SE меньше и дешевле, чем предыдущие контроллеры переменного тока Curtis, что является очень выгодным для всех типов приложений.
Тип двигателя
Индукция переменного тока
PMAC
Применение/Функция
Тяга
Насос
Диапазон номинального напряжения (В постоянного тока)
24 В
36 В
48 В
60 В
72 В
80 В
84 В
96 В
Максимальный ток
1000Arms
1239E
Модель Curtis 1239E с изолированной логикой 12 В обеспечивает энергоэффективное управление асинхронными асинхронными двигателями переменного тока, выполняющими функции тягового привода на транспортном средстве. Он предлагает разработчикам транспортных средств экономически эффективное сочетание мощности, производительности и функциональности.
Тип двигателя
Индукция переменного тока
PMAC
Применение/Функция
Тяговое усилие
Диапазон номинального напряжения (В постоянного тока)
72 В
80 В
84 В
96 В
108 В
120 В
144 В
Максимальный ток
650Arms
1266
Контроллеры Curtis Model 1266 A/R SepEx® являются программируемыми и микропроцессорными, с усовершенствованной силовой секцией MOSFET для плавного и плавного управления двигателями с независимым возбуждением.
Тип двигателя
SepEx®
Применение/Функция
Тяговое усилие
Диапазон номинального напряжения (В постоянного тока)
36 В
48 В
Максимальный ток
350A
1268
Контроллеры Curtis PMC модели 1268 SepEx® являются программируемыми и микропроцессорными, с усовершенствованной силовой секцией MOSFET для плавного и плавного управления двигателями с независимым возбуждением.
Тип двигателя
SepEx®
Применение/Функция
Тяговое усилие
Диапазон номинального напряжения (В постоянного тока)
36 В
48 В
Максимальный ток
500A
1212
Контроллер скорости двигателя Curtis модели 1212 обеспечивает точное и плавное управление приводными двигателями с постоянными магнитами для транспортных средств с аккумуляторным питанием.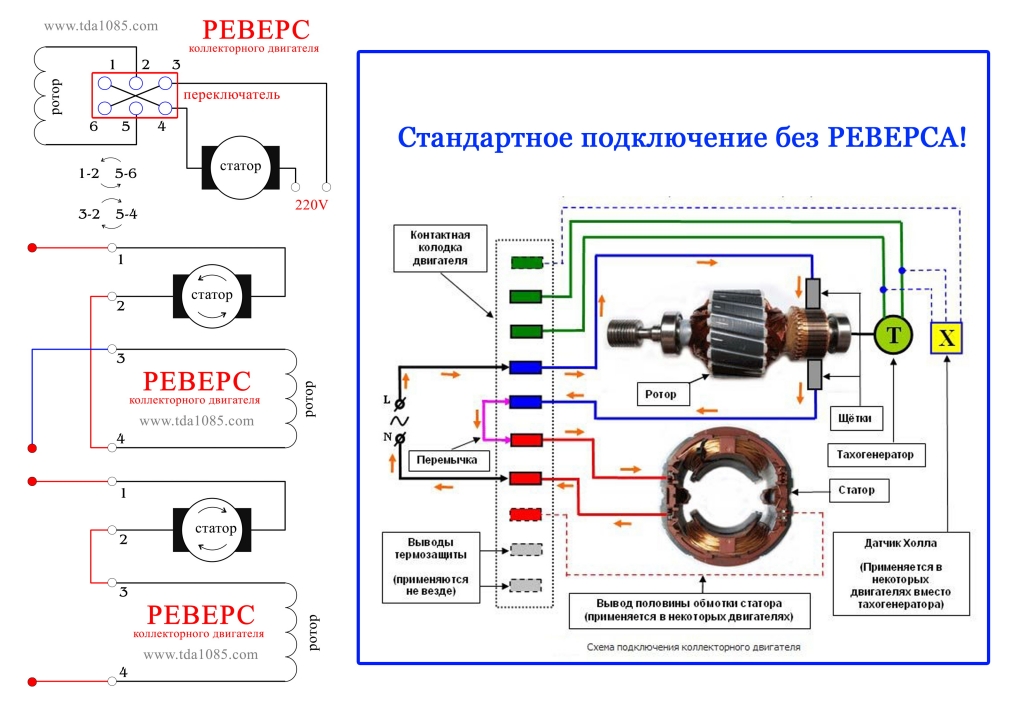
Тип двигателя
Матовый постоянный магнит постоянного тока
Применение/Функция
Тяга
Насос
Диапазон номинального напряжения (В постоянного тока)
24 В
Максимальный ток
70A
1212BL
Контроллеры скорости двигателя Curtis модели 1212BL обеспечивают эффективное и оптимальное управление бесщеточными двигателями постоянного тока (BLDC) для транспортных средств с аккумуляторным питанием. Модель 1212BL оптимизирована для использования на малых/микротележках класса III и подметальных машинах для ухода за полами. Широкие возможности программирования позволяют использовать контроллеры модели 1212BL в любых маломощных двигателях BLDC.
Тип двигателя
Бесщеточный DC (BLDC)
Применение/Функция
Тяга
Насос
Диапазон номинального напряжения (В постоянного тока)
36 В
48 В
Максимальный ток
70A
1212C
Контроллер скорости двигателя Curtis модели 1212C обеспечивает эффективное и оптимальное управление приводными двигателями с постоянными магнитами для промышленных транспортных средств с батарейным питанием.
Тип двигателя
Матовый постоянный магнит постоянного тока
Применение/Функция
Тяга
Насос
Диапазон номинального напряжения (В постоянного тока)
24 В
Максимальный ток
90A
1212E
Контроллеры двигателей Curtis модели 1212E обеспечивают эффективное и оптимальное управление двигателями с щеточными постоянными магнитами (ПМ) для транспортных средств с аккумуляторным питанием. Модель 1212E оптимизирована для использования на тележках с поддонами класса III малой грузоподъемности и машинах для ухода за полом, таких как подметальные машины и поломоечные машины.
Тип двигателя
Матовый постоянный магнит постоянного тока
Применение/Функция
Тяговое усилие
Диапазон номинального напряжения (В постоянного тока)
24 В
Максимальный ток
90A
1212P
Контроллер скорости двигателя Curtis модели 1212P обеспечивает эффективное и оптимальное управление приводными двигателями с постоянными магнитами для промышленных транспортных средств с батарейным питанием.
Тип двигателя
Матовый постоянный магнит постоянного тока
Применение/Функция
Тяговое усилие
Диапазон номинального напряжения (В постоянного тока)
24 В
Максимальный ток
90A
1212S
Контроллеры скорости двигателя Curtis моделей 1212P и 1212S обеспечивают эффективное и оптимальное управление приводными двигателями с постоянными магнитами для промышленных транспортных средств с батарейным питанием. Оптимизирован для использования на малотоннажных гидравлических тележках класса III и аналогичных электрических промышленных транспортных средствах. Программируемость преобразователей 1212P&S позволяет применять их в любых маломощных двигателях с постоянными магнитами.
Тип двигателя
Матовый постоянный магнит постоянного тока
Применение/Функция
Тяга
Насос
Диапазон номинального напряжения (В постоянного тока)
24 В
36 В
Максимальный ток
125A
1220
Curtis Model 1220 представляет собой контроллер щеточного электродвигателя постоянного тока с постоянными магнитами для электроусилителя рулевого управления, систем рулевого управления по проводам и работает только с контроллерами тяги переменного тока Curtis с поддержкой VCL.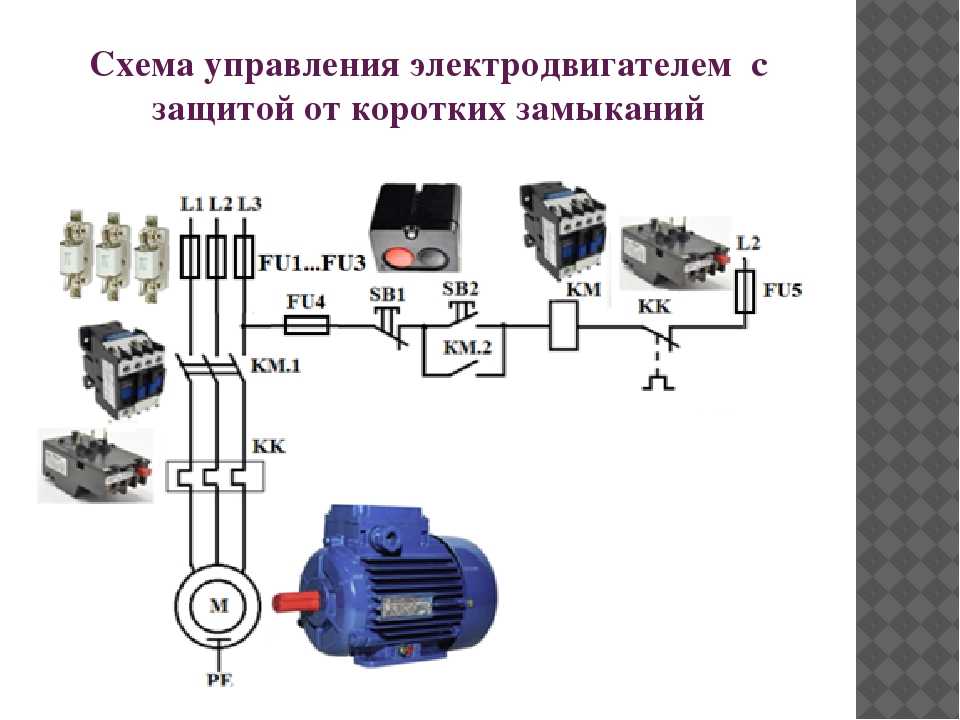 Двигатель рулевого управления работает как исполнительный механизм для изменения угла поворота колеса (колес), тем самым изменяя направление движения. Модель 1220 интерпретирует входную команду рулевого управления и обратную связь о положении колеса, приводя в действие двигатель рулевого управления, чтобы переместить колесо в желаемое положение.
Двигатель рулевого управления работает как исполнительный механизм для изменения угла поворота колеса (колес), тем самым изменяя направление движения. Модель 1220 интерпретирует входную команду рулевого управления и обратную связь о положении колеса, приводя в действие двигатель рулевого управления, чтобы переместить колесо в желаемое положение.
Тип двигателя
Матовый постоянный магнит постоянного тока
Применение/Функция
Электронный усилитель рулевого управления (EPS)
Диапазон номинального напряжения (В постоянного тока)
24 В
Максимальный ток
50A
1220E
Модель Curtis 1220E представляет собой контроллер щеточного двигателя постоянного тока с постоянными магнитами для электроусилителя руля и систем рулевого управления по проводам. Этот контроллер предназначен исключительно для контроллеров тяги переменного тока с поддержкой Curtis Vehicle Control Language (VCL). Двигатель рулевого управления работает как исполнительный механизм для изменения траектории движения путем изменения угла поворота колес.
Двигатель рулевого управления работает как исполнительный механизм для изменения траектории движения путем изменения угла поворота колес.
Тип двигателя
Матовый постоянный магнит постоянного тока
Применение/Функция
Электронный усилитель рулевого управления (EPS)
Диапазон номинального напряжения (В постоянного тока)
24 В
36 В
48 В
Максимальный ток
70A
1229
Контроллер Curtis Model 1229 представляет собой сверхмощный контроллер, предназначенный для сложных тяговых приложений в неблагоприятных условиях. Он имеет степень защиты IP65 и использует передовую мощную двухмикропроцессорную логическую архитектуру, соответствующую стандарту EN ISO 13849.соответствия, а также имеет CANbus, 4 вспомогательных драйвера по 10 А и гибкую функцию сопоставления ввода-вывода.
Тип двигателя
Матовый постоянный магнит постоянного тока
Применение/Функция
Тяга
Насос
Диапазон номинального напряжения (В постоянного тока)
24 В
36 В
48 В
Максимальный ток
275А
1204М
Модели Curtis 1204M/1205M обеспечивают полностью программируемое управление двигателями постоянного тока, выполняющими тяговые или насосные функции. Эти микропроцессорные контроллеры MOSFET повышают гибкость и универсальность проверенного временем семейства контроллеров двигателей серии Curtis.
Эти микропроцессорные контроллеры MOSFET повышают гибкость и универсальность проверенного временем семейства контроллеров двигателей серии Curtis.
Тип двигателя
Серия
Применение/Функция
Тяговое усилие
Диапазон номинального напряжения (В постоянного тока)
24В
36 В
48 В
60 В
72 В
Максимальный ток
500A
1205M
Модели Curtis 1204M/1205M обеспечивают полностью программируемое управление двигателями постоянного тока, выполняющими тяговые или насосные функции. Эти микропроцессорные контроллеры MOSFET повышают гибкость и универсальность проверенного временем семейства контроллеров двигателей серии Curtis.
Тип двигателя
Серия
Применение/Функция
Тяговое усилие
Диапазон номинального напряжения (В постоянного тока)
24 В
36 В
48 В
60 В
72 В
Максимальный ток
500A
1209M
Модели Curtis 1209M/1221M обеспечивают полностью программируемое управление двигателями постоянного тока, выполняющими тяговые или насосные функции. Эти микропроцессорные контроллеры MOSFET повышают гибкость и универсальность проверенного временем семейства контроллеров двигателей серии Curtis.
Эти микропроцессорные контроллеры MOSFET повышают гибкость и универсальность проверенного временем семейства контроллеров двигателей серии Curtis.
Тип двигателя
Серия
Применение/Функция
Тяговое усилие
Диапазон номинального напряжения (В постоянного тока)
36 В
48 В
60 В
72 В
Максимальный ток
450A
1216
Модель Curtis 1216 представляет собой высокорентабельный контроллер гидравлического насоса для использования с двигателями постоянного тока с последовательной обмоткой. Это обеспечивает исключительную ценность для автомобильных гидравлических насосов, таких как ножничные подъемники и другие типы мобильных подъемных рабочих платформ.
Тип двигателя
Серия
Применение/Функция
Насос
Диапазон номинального напряжения (В постоянного тока)
24 В
Максимальный ток
360A
1221M
Модели Curtis 1209M/1221M обеспечивают полностью программируемое управление двигателями постоянного тока, выполняющими тяговые или насосные функции.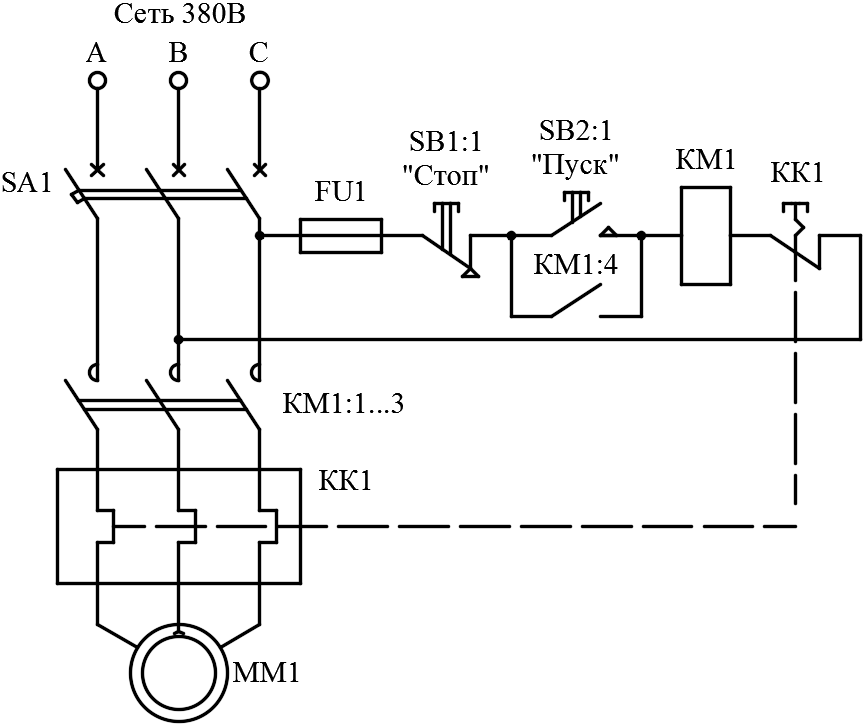 Эти микропроцессорные контроллеры MOSFET повышают гибкость и универсальность проверенного временем семейства контроллеров двигателей серии Curtis.
Эти микропроцессорные контроллеры MOSFET повышают гибкость и универсальность проверенного временем семейства контроллеров двигателей серии Curtis.
Тип двигателя
Серия
Применение/Функция
Тяговое усилие
Диапазон номинального напряжения (В постоянного тока)
48 В
60 В
72 В
Максимальный ток
550A
1253
Модель 1253 представляет собой контроллер мощного гидравлического насоса, который обеспечивает как цифровой вход, так и аналоговое управление двигателями постоянного тока с обмоткой дроссельной заслонки. Он имеет микропроцессорную логику с программируемыми параметрами и предлагает максимальную гибкость при минимальных затратах.
Тип двигателя
Серия
Применение/Функция
Насос
Диапазон номинального напряжения (В постоянного тока)
48 В
80 В
Максимальный ток
600A
1226
Контроллеры скорости двигателя Curtis модели 1226 обеспечивают эффективное и оптимальное управление приводными двигателями с постоянными магнитами для транспортных средств с аккумуляторным питанием. Оптимизировано для использования на тележках с поддонами класса III малой грузоподъемности и подметально-моечных машинах для ухода за полом. Очень гибкая программируемость позволяет применять их в любых маломощных двигателях с постоянными магнитами.
Оптимизировано для использования на тележках с поддонами класса III малой грузоподъемности и подметально-моечных машинах для ухода за полом. Очень гибкая программируемость позволяет применять их в любых маломощных двигателях с постоянными магнитами.
Тип двигателя
Матовый постоянный магнит постоянного тока
Применение/Функция
Тяга
Насос
Диапазон номинального напряжения (В постоянного тока)
24 В
36 В
48 В
Максимальный ток
150A
1226BL
Контроллеры скорости двигателя Curtis модели 1226BL обеспечивают эффективное и оптимальное управление бесщеточными приводными двигателями постоянного тока для транспортных средств с аккумуляторным питанием. Оптимизировано для использования на тележках с поддонами класса III малой грузоподъемности и подметально-моечных машинах для ухода за полом.
