Как работает частотный преобразователь для асинхронного двигателя. Какие преимущества дает использование частотных преобразователей. Где применяются преобразователи частоты в промышленности. Как выбрать подходящий частотный преобразователь.
Что такое частотный преобразователь для асинхронного двигателя
Частотный преобразователь для асинхронного двигателя — это электронное устройство, позволяющее плавно регулировать скорость вращения электродвигателя путем изменения частоты и напряжения питания. Основные компоненты частотного преобразователя:
- Выпрямитель — преобразует переменное напряжение сети в постоянное
- Инвертор — преобразует постоянное напряжение в переменное регулируемой частоты
- Система управления — формирует сигналы управления инвертором
Принцип работы частотного преобразователя заключается в преобразовании напряжения сети в напряжение с регулируемой частотой и амплитудой. Это позволяет плавно изменять скорость вращения асинхронного электродвигателя.

Преимущества использования частотных преобразователей
Применение частотных преобразователей для управления асинхронными двигателями дает ряд существенных преимуществ:
- Плавный пуск и торможение двигателя без пусковых токов и ударных нагрузок
- Широкий диапазон регулирования скорости (от 1:20 до 1:1000)
- Высокая точность поддержания заданной скорости
- Снижение энергопотребления за счет оптимизации режимов работы
- Увеличение срока службы двигателя и приводного механизма
- Возможность дистанционного управления и мониторинга
Области применения частотных преобразователей
Частотные преобразователи широко применяются в различных отраслях промышленности для управления асинхронными двигателями:
- Насосное и компрессорное оборудование
- Вентиляционные системы
- Конвейеры и транспортеры
- Подъемно-транспортное оборудование
- Металлообрабатывающие станки
- Экструдеры и прессы
- Центрифуги
- Смесители и мешалки
Использование частотных преобразователей позволяет оптимизировать технологические процессы, повысить качество продукции и снизить эксплуатационные расходы.
Как выбрать частотный преобразователь для асинхронного двигателя
При выборе частотного преобразователя необходимо учитывать следующие основные параметры:
- Мощность и номинальный ток двигателя
- Напряжение питающей сети
- Диапазон регулирования скорости
- Характер нагрузки (постоянный или переменный момент)
- Необходимость рекуперации энергии
- Условия эксплуатации (температура, влажность, запыленность)
- Наличие специальных функций (позиционирование, синхронизация)
Правильный выбор частотного преобразователя обеспечит оптимальную работу электропривода и максимальный экономический эффект.
Энергосбережение при использовании частотных преобразователей
- Оптимизации режимов работы двигателя
- Снижения потерь при пуске и торможении
- Исключения механических регулирующих устройств
- Повышения коэффициента мощности электропривода
В зависимости от типа механизма и режима работы экономия электроэнергии может достигать 30-60%. Это позволяет существенно снизить эксплуатационные расходы и окупить затраты на внедрение частотного привода за 1-2 года.
Особенности эксплуатации частотных преобразователей
При эксплуатации частотных преобразователей необходимо учитывать некоторые особенности:
- Необходимость использования экранированных кабелей для подключения двигателя
- Установка выходных фильтров для снижения электромагнитных помех
- Обеспечение эффективного охлаждения преобразователя
- Периодическое техническое обслуживание (очистка, протяжка контактов)
- Настройка параметров под конкретный механизм
Соблюдение правил эксплуатации и своевременное обслуживание обеспечат длительную и надежную работу частотного преобразователя.
Современные тенденции в развитии частотных преобразователей
Основные направления совершенствования частотных преобразователей:
- Повышение энергоэффективности за счет применения новых полупроводниковых приборов
- Расширение функциональных возможностей и интеллектуализация управления
- Улучшение массогабаритных показателей
- Повышение надежности и увеличение срока службы
- Интеграция в системы автоматизации производства
Развитие технологий позволяет создавать все более совершенные и эффективные частотные преобразователи для управления асинхронными двигателями.

Заключение
Частотные преобразователи являются современным и эффективным средством управления асинхронными электродвигателями. Их применение позволяет существенно повысить энергоэффективность, улучшить качество технологических процессов и снизить эксплуатационные расходы. При правильном выборе и грамотной эксплуатации частотные преобразователи обеспечивают значительный экономический эффект и быструю окупаемость.
Преобразователи частоты | INSTART
Данная политика конфиденциальности относится к сайту под доменным именем instart-info.ru. Эта страница содержит сведения о том, какую информацию мы (администрация сайта) или третьи лица могут получать, когда вы пользуетесь нашим сайтом.
Данные, собираемые при посещении сайта
Персональные данные
Персональные данные при посещении сайта передаются пользователем добровольно, к ним могут относиться: имя, фамилия, отчество, номера телефонов, адреса электронной почты, адреса для доставки товаров или оказания услуг, реквизиты компании, которую представляет пользователь, должность в компании, которую представляет пользователь, аккаунты в социальных сетях; поля форм могут запрашивать и иные данные.
Эти данные собираются в целях оказания услуг или продажи товаров, связи с пользователем или иной активности пользователя на сайте, а также, чтобы отправлять пользователям информацию, которую они согласились получать.
Мы не проверяем достоверность оставляемых данных, однако не гарантируем качественного исполнения заказов или обратной связи с нами при некорректных данных.
Данные собираются имеющимися на сайте формами для заполнения (например, регистрации, оформления заказа, подписки, оставления отзыва, обратной связи и иными).
Формы, установленные на сайте, могут передавать данные как напрямую на сайт, так и на сайты сторонних организаций (скрипты сервисов сторонних организаций).
Также данные могут собираться через технологию cookies (куки) как непосредственно сайтом, так и скриптами сервисов сторонних организаций. Эти данные собираются автоматически, отправку этих данных можно запретить, отключив cookies (куки) в браузере, в котором открывается сайт.
Не персональные данные
Кроме персональных данных при посещении сайта собираются не персональные данные, их сбор происходит автоматически веб-сервером, на котором расположен сайт, средствами CMS (системы управления сайтом), скриптами сторонних организаций, установленными на сайте. К данным, собираемым автоматически, относятся: IP адрес и страна его регистрации, имя домена, с которого вы к нам пришли, переходы посетителей с одной страницы сайта на другую, информация, которую ваш браузер предоставляет добровольно при посещении сайта, cookies (куки), фиксируются посещения, иные данные, собираемые счетчиками аналитики сторонних организаций, установленными на сайте.
К данным, собираемым автоматически, относятся: IP адрес и страна его регистрации, имя домена, с которого вы к нам пришли, переходы посетителей с одной страницы сайта на другую, информация, которую ваш браузер предоставляет добровольно при посещении сайта, cookies (куки), фиксируются посещения, иные данные, собираемые счетчиками аналитики сторонних организаций, установленными на сайте.
Эти данные носят неперсонифицированный характер и направлены на улучшение обслуживания клиентов, улучшения удобства использования сайта, анализа посещаемости.
Предоставление данных третьим лицам
Мы не раскрываем личную информацию пользователей компаниям, организациям и частным лицам, не связанным с нами. Исключение составляют случаи, перечисленные ниже.
Данные пользователей в общем доступе
Персональные данные пользователя могут публиковаться в общем доступе в соответствии с функционалом сайта, например, при оставлении отзывов, может публиковаться указанное пользователем имя, такая активность на сайте является добровольной, и пользователь своими действиями дает согласие на такую публикацию.
По требованию закона
Информация может быть раскрыта в целях воспрепятствования мошенничеству или иным противоправным действиям; по требованию законодательства и в иных случаях, предусмотренных законом.
Для оказания услуг, выполнения обязательств
Пользователь соглашается с тем, что персональная информация может быть передана третьим лицам в целях оказания заказанных на сайте услуг, выполнении иных обязательств перед пользователем. К таким лицам, например, относятся курьерская служба, почтовые службы, службы грузоперевозок и иные.
Сервисам сторонних организаций, установленным на сайте
На сайте могут быть установлены формы, собирающие персональную информацию других организаций, в этом случае сбор, хранение и защита персональной информации пользователя осуществляется сторонними организациями в соответствии с их политикой конфиденциальности.
Сбор, хранение и защита полученной от сторонней организации информации осуществляется в соответствии с настоящей политикой конфиденциальности.
Как мы защищаем вашу информацию
Мы принимаем соответствующие меры безопасности по сбору, хранению и обработке собранных данных для защиты их от несанкционированного доступа, изменения, раскрытия или уничтожения, ограничиваем нашим сотрудникам, подрядчикам и агентам доступ к персональным данным, постоянно совершенствуем способы сбора, хранения и обработки данных, включая физические меры безопасности, для противодействия несанкционированному доступу к нашим системам.
Ваше согласие с этими условиями
Используя этот сайт, вы выражаете свое согласие с этой политикой конфиденциальности. Если вы не согласны с этой политикой, пожалуйста, не используйте наш сайт. Ваше дальнейшее использование сайта после внесения изменений в настоящую политику будет рассматриваться как ваше согласие с этими изменениями.
Отказ от ответственности
Политика конфиденциальности не распространяется ни на какие другие сайты и не применима к веб-сайтам третьих лиц, которые могут содержать упоминание о нашем сайте и с которых могут делаться ссылки на сайт, а также ссылки с этого сайта на другие сайты сети Интернет. Мы не несем ответственности за действия других веб-сайтов.
Изменения в политике конфиденциальности
Мы имеем право по своему усмотрению обновлять данную политику конфиденциальности в любое время. В этом случае мы опубликуем уведомление на главной странице нашего сайта. Мы рекомендуем пользователям регулярно проверять эту страницу для того, чтобы быть в курсе любых изменений о том, как мы защищаем информацию пользователях, которую мы собираем. Используя сайт, вы соглашаетесь с принятием на себя ответственности за периодическое ознакомление с политикой конфиденциальности и изменениями в ней.
Как с нами связаться
Если у вас есть какие-либо вопросы о политике конфиденциальности, использованию сайта или иным вопросам, связанным с сайтом, свяжитесь с нами:
8 800 222 00 21
info@instart-info. ru
ru
Преобразователь частоты термины, устройство мягкого пуска
Преобразователь частоты (ПЧ) — это электронное устройство для изменения частоты электрического тока (напряжения):
- Машина, преобразующая переменной ток одной частоты в переменный ток другой частоты (по СТ МЭК 50(411)-73)
- Преобразователь электрической энергии, который преобразует электрическую мощность с изменением частоты (по СТ МЭК 50(151)-78)
Низковольтный ПЧ – частотный преобразователь, работающий на напряжении 110, 220, 380 или 660 В. Низковольтные преобразователь частоты применяются для управления низковольтными асинхронным и синхронными электродвигателями.
Высоковольтный ПЧ (средневольтный ПЧ) – преобразователь частоты, работающий на напряжениях от 2,1 до 10 кВ. Применяются для управления высоковольтными синхронными и асинхронным электродвигателем.
В различный источниках преобразователь частоты может называться также:
- Частотный преобразователь
- Frequency converter
- Инвертор
- DC/AC Converter
- DC/AC Drive
- Инвертор напряжения
- Инвертор тока
- Частотник
- Электропреобразователь частоты
- Частотно-регулируемый привод
- Тиристорный регулятор напряжения
Frequency converter — частотный преобразователь;
Инвертор — устройство для преобразования постоянного тока в переменный с изменением величины частоты и/или напряжения.
Инвертор напряжения – это инвертор, форма напряжения на выходе которого определяется только порядком переключения вентилей инвертора, а форма тока зависит от характера нагрузки. Питание автономного инвертора осуществляется от источника напряжения;
Инвертор тока – это инвертор, на выходе которого форма тока определяется только порядком переключения вентилей инвертора, а форма напряжения зависит от характера нагрузки. Питание инвертора этого типа должно выполняться от источника тока;
Питание инвертора этого типа должно выполняться от источника тока;
Частотно-регулируемый привод (ЧРП) — система управления частотой вращения ротора асинхронного (или синхронного) электродвигателя. ЧРП состоит из электродвигателя и частотного преобразователя;
DC/AC Drive — это устройство, состоящее из выпрямителя, преобразующего переменный ток промышленной частоты в постоянный, и инвертора, преобразующего постоянный ток в переменный, требуемых напряжения и частоты;
DC/AC converter — устройство, преобразующие электрическую энергию источника напряжения постоянного тока в электрическую энергию переменного тока с изменением величины частоты и/или напряжения.
Устройство плавного пуска (УПП) – это электронное устройство, используемое для плавного пуска и торможения синхронных и асинхронных электродвигателей.
Низковольтное УПП — устройство плавного пуска работающее на низком напряжении до 660 В.
Высоковольтное УПП — устройство плавного пуска работающее на средних напряжениях до 15 кВ.
В различный устройство плавного пуска может называться также:
- Softstarter
- Софтстартер
- Устройство мягкого пуска
- Мягкий пуск
- Плавный пуск
- Тиристорный регулятор напряжения
Softstarter или Софтстартер — устройство плавного пуска;
Устройство мягкого пуска (мягкий пуск) – устройство плавного пуска;
Тиристорный регулятор напряжения – это устройство, предназначенное для регулирования частоты вращения электродвигателя и используется главным образом для управления пуском. Регулировка происходит в результате изменения напряжения, которое подведено к статору двигателя, и смены угла открывания тиристоров.
Сетевой дроссель – устройство для сглаживания скачков напряжения в питающей сети и компенсации высших гармоник из сети в преобразователь и обратно.
Сглаживающий дроссель — устройство для компенсации высших гармоник из сети в преобразователь и обратно.
Радиочастотные фильтры (фильтры ЕМС) – устройство для снижения уровня помех в широком диапазоне частот 150 кГц-30мГц.
Дроссель du/dt или Фильтр du/dt — устройство компенсации импульсов напряжения на выходе преобразователя частоты. Применяется для защиты изоляции обмоток электродвигателя.
Моторный дроссель — устройство компенсация скачков напряжения на клеммах двигателя. В отличие от фильтров du/dt, моторный дроссель обладает существенно большей индуктивностью и применяется при больших длинах кабеля и большой частоте переключений.
Синусный фильтр — устройство для обеспечения синусоидального напряжения между клеммами электродвигателя. Обеспечивает комплексную защиту двигателя и частотного преобразователя.
Тормозной резистор – устройство обеспечения быстрого торможения, применяемое в составе привода с большой инерцией.
ШИМ, Широтно-импульсная модуляция — это способ кодирования аналогового сигнала путём изменения ширины (длительности) прямоугольных импульсов несущей частоты. Принцип ШИМ применяется в частотных преобразователях для получения питающего напряжения нужной частоты.
Частотные преобразователи для промышленных электродвигателей, частотные регуляторы для насосов и вентиляторов
Частотные преобразователи и устройства плавного пуска для асинхронного электродвигателя это высокотехнологичное оборудование, позволяющее не только экономить электроэнергию и снижать нагрузку на оборудование и электрические сети вашего производства, а так же значительно снизить нагрузку на всю электрическую сеть нашей страны.
Наша компания относительно недавно на рынке регулируемого электропривода, но на протяжении этого времени зарекомендовала себя как надежный и качественный поставщик, о чем свидетельствуют отзывы наших партнеров, о которых есть информация на нашем сайте. Это конечно не все кто приобрел наше оборудование, по Вашему запросу мы готовы предоставить любые имеющиеся рекомендации. В производстве нашего оборудования используются комплектующие ведущих мировых производителей электронных компонентов и модулей, проверенных временем и тяжелыми условиями эксплуатации. Мы осуществляем модульную сборку своих приборов в России.
Это конечно не все кто приобрел наше оборудование, по Вашему запросу мы готовы предоставить любые имеющиеся рекомендации. В производстве нашего оборудования используются комплектующие ведущих мировых производителей электронных компонентов и модулей, проверенных временем и тяжелыми условиями эксплуатации. Мы осуществляем модульную сборку своих приборов в России.
В распоряжении ООО «Лидер» имеется штат квалифицированных специалистов, а так же оборудование позволяющее тестировать преобразователи частоты и устройства плавного пуска в различных режимах, что позволяет гарантировать их надежность и работоспособность перед отгрузкой конечному потребителю. В настоящее время очень много предложений на рынке аналогичной продукции, может быть и по более привлекательной цене, но как показывает практика низкая цена, не всегда гарантирует заявленное качество оборудования и сервисного обслуживания. Мы не навязываем собственный продукт! Мы рекомендуем покупать продукцию ООО «Лидер». Конечный выбор за Вами!
Ниже представлены три линейки частотных преобразователей, каждая из которых содержит в себе весь спектр мощностей от 0,75 кВт до 630 кВт.
Серия А300 — для общепромышленной нагрузки
Общепромышленная серия преобразователей частоты подходит для оборудования с тяжелым пуском и высокой нагрузкой (станки, экструдеры, куттеры, компрессоры, конвейеры, погружные насосы и мн. др.). Преобразователь частоты с высокоточным пусковым моментом при низких скоростях (пусковой вращающий момент: 0.5Hz/150% (векторное управление), 1Hz/150% (U/f)), встроенным ПИД-регулятором (см. инструкцию по настройке), функции полной защиты двигателя с возможностью изменять параметры настройки, съемным выносным пультом управления, повышенным перегрузочным моментом до 200%, автоматическим подъемом крутящего момента, функцией коррекции скольжения, автоматическим регулированием напряжения (AVR) и встроенным интерфейсом RS-485.
Преобразователь частоты серии А300 имеет съемный пульт управления и может использоваться удаленно, до 60 метров от частотного преобразователя по витой паре без переходников и дополнительных модулей, усилителей сигнала.
Серия В600 — для вентиляторной нагрузки (Снят с производства)
Специальная вентиляторная серия преобразователей частоты предназначена для управления электродвигателями насосов, вентиляторов, дымососов и прочего оборудования. Инвертор имеет высокоточный пусковой момент при низких скоростях, встроенный ПИД-регулятор, функции полной защиты двигателя с возможностью изменять параметры настройки, перегрузочный момент до 180%, автоматический подъем крутящего момента, функцию коррекции скольжения, съемный выносной пульт управления, автоматическое регулирование напряжения (AVR) и встроенный интерфейс RS-485 (протокол Modbus-RTU)
В частотных преобразователях серии В600 мощностью от 18.5 кВт установлен двухстрочный пульт управления, который позволяет отслеживать два параметра одновременно.
Серия B601 — для вентиляторной нагрузки
Улучшенная серия для управления электродвигателями насосов, вентиляторов, дымососов и прочего оборудования. Инвертор имеет высокоточный пусковой момент при низких скоростях, Векторное управление, встроенный ПИД-регулятор, функции полной защиты двигателя с возможностью изменять параметры настройки, перегрузочный момент до 160%-1с, автоматический подъем крутящего момента, функцию коррекции скольжения, несущая частота 1-16 кГц, выходная частота 0-600Гц, съемный выносной пульт управления, автоматическое регулирование напряжения (AVR) и встроенный интерфейс RS-485 (протокол Modbus-RTU)
Серия B60 mini (Снят с производства)
Серия Мини используется для регулирования приводов с асинхронным электродвигателем,
предназначена для управления приводами насосов, вентиляторов, лентопротяжных машин,
транспортёров миксеров и т. д — для использования в системах малой автоматизации.
д — для использования в системах малой автоматизации.
Частотные преобразователи двигателей, частотный преобразователь для асинхронных электродвигателей, цены ниже
В ООО «Промпривод» постоянно имеются на складе частотные преобразователи Lenze, Delta Electronics и Innovert. Кроме того, существует возможность поставки под заказ частотных преобразователей других производителей.
Общие сведения.
При работе с электрооборудованием нередко возникает необходимость управления частотой вращения асинхронного электродвигателя. Для этого могут использоваться гидравлические муфты, дополнительные резисторы в цепи роторных и статорных обмоток, механические вариаторы, электромеханические преобразователи частоты и, наконец, статические преобразователи. Первые четыре способа регулирования недостаточно экономичны, трудоёмки при их реализации и малоэффективны.
Поэтому давайте более подробно рассмотрим последний тип преобразователя — частотный преобразователь двигателя.
Обеспечивается плавное регулирование скорости вращения в широком диапазоне при сохранении достаточно жёстких механических характеристик.
Регулирование скорости, кроме того, не вызывает увеличения коэффициента скольжения асинхронного двигателя, поэтому потери мощности при регулировании малы.
Но для того, чтобы обеспечить высокие показатели экономичности асинхронного двигателя — коэффициент мощности, коэффициент полезного действия, способность к перегрузкам — одновременно с частотой должно меняться и подводимое напряжение.
Вывод: для плавного (бесступенчатого) регулирования частоты вращения вала, требуется частотный преобразователь для электродвигателя, который должен обеспечивать одновременное регулирование частоты и напряжения на статорной обмотке последнего.
Теоретическое обоснование метода частотного регулирования было проведено достаточно давно, но реализацию его тормозила высокая стоимость компонентов, необходимых для создания модуля частотного управления. И лишь появление силовых схем на IGBT-транзисторах, а также разработка высокопроизводительных микропроцессорных систем управления позволили создать современные преобразователи частоты приемлемой стоимости.
И лишь появление силовых схем на IGBT-транзисторах, а также разработка высокопроизводительных микропроцессорных систем управления позволили создать современные преобразователи частоты приемлемой стоимости.
Принцип работы.
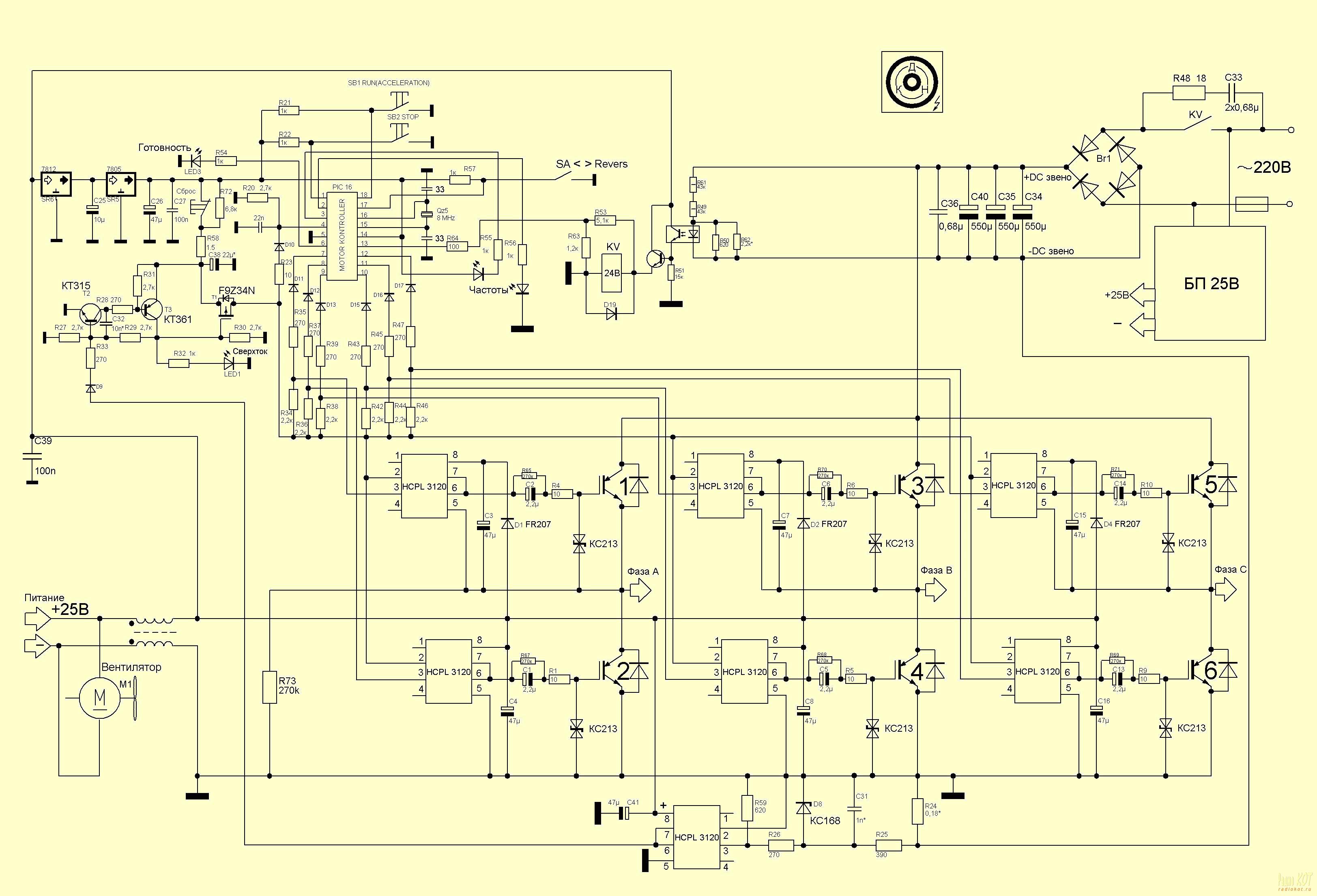
Большинство промышленных преобразователей частоты работают по схеме двойного преобразования. Они состоят из трех основных узлов: неуправляемого выпрямителя, силового импульсного инвертора и управляющего модуля.
Неуправляемый выпрямитель преобразует напряжение сети в напряжение постоянного тока.
Силовой трехфазный импульсный инвертор собран на шести транзисторных ключах. Через эти ключи каждая из обмоток статора электродвигателя подключается к выводам выпрямителя по специальной программе, задаваемой управляющим модулем. Эта программа и обеспечивает получение в обмотках статора стандартных 3-х фазных сигналов (аналогов сигналов 3-х фазной сети). Таким образом, инвертор осуществляет обратное преобразование выпрямленного напряжения в трехфазное переменное напряжение. Но при этом преобразовании уже появляется возможность регулирования параметров 3-х фазного сигнала. В качестве ключей в инверторе используются силовые IGBT-транзисторы, имеющие высокую частоту переключения, что позволяет воспроизвести синусоидальный сигнал с высокой степенью точности.
Области применения.
Использование частотного преобразователя для асинхронных двигателей для регулирования скорости движения конвейеров и транспортировочных устройств даёт значительную экономию электроэнергии и увеличивает эффективность использования этих средств. Тот же результат получается в случае использования этого метода регулировки при управлении насосными установками. Благодаря его применению без труда удаётся поддерживать в системе нужное давление и регулировать её производительность. При использовании регулируемого привода в станках мы можем плавно изменять скорость подачи или главного движения.
В НАШЕМ АССОРТИМЕНТЕ ТАКЖЕ ПРЕДСТАВЛЕНЫ:
Мотор-редукторы Innovari (Италия) – экономичные, надежные червячные и цилиндрические мотор-редукторы, компактные насадные редукторы.
Экономичные по цене, но очень надежные датчики Autonics (Южная Корея) — индуктивные и емкостные датчики, оптические датчики, датчики угла поворота (энкодеры), датчики контроля параметров среды.
Датчики UWT GmbH (Германия) — датчики контроля и измерения уровня сыпучих продуктов — песок, опилки, цемент, мука, гранулят. Ротационные (механические), вибровилки, акустические (измерение до 60 м), лотовые системы (электромеханические датчики непрерывного измерения уровня).
Новые уникальные сервоприводы Position Servo компании Lenze. Возможны различные режимы управления: моментом, скоростью вращения, ведущий-ведомый с электронным редуктором.
Частотный преобразователь для электродвигателя — НТЦ Энерго-Ресурс
Недостатки механического регулирования оборотов ротора электродвигателяУправление крутящим моментом двигателя посредством механических устройств не снижает пусковой ток двигателя и обладает малым диапазоном регулирования. К тому же, механические устройства – вариаторы при работе испытывают значительные механические нагрузки и подвержены износу. Это обуславливает высокую себестоимость по сравнению с преобразователями частоты, которые лучше адаптированы под частые перегрузки.
Частотные преобразователи подключаются непосредственно к двигателю, что позволяет исключить применение дополнительных механизмов. Также при необходимости преобразователь частоты может временно повысить скорость выше номинальной, в отличие от механического регулирования скорости, которое обычно ограничивает ее диапазон и сужает возможности в выборе режима функционирования электродвигателя.
Технические аспекты применения частотных преобразователейВ настоящее время, асинхронный электродвигатель стал основным устройством в большинстве электроприводов. Все чаще для управления им используется частотный преобразователь – инвертор с ШИМ регулированием. Такое управление дает массу преимуществ, но и создает некоторые проблемы выбора тех или иных технических решений. Попробуем разобраться в них более подробно.
Все чаще для управления им используется частотный преобразователь – инвертор с ШИМ регулированием. Такое управление дает массу преимуществ, но и создает некоторые проблемы выбора тех или иных технических решений. Попробуем разобраться в них более подробно.
Выбор мощности частотного преобразователя
При выборе мощности частотного преобразователя необходимо основываться не только на мощности электродвигателя, но и на номинальных токах и напряжениях преобразователя и двигателя. Дело в том, что указанная мощность частотного преобразователя относится только к эксплуатации его со стандартным 4-х полюсным асинхронным электродвигателем в стандартном применении.
Реальные приводы имеют много аспектов, которые могут привести к росту токовой нагрузке привода, например, при пуске. В общем случае, применение частотного привода позволяет снизить токовые и механические нагрузки за счет плавного пуска. Например, пусковой ток снижается с 600% до 100-150% от номинального.
Работа привода на пониженной скорости
Необходимо помнить, что хотя частотный преобразователь легко обеспечивает регулирование по скорости 10:1, но при работе двигателя на низких оборотах мощности собственного вентилятора может не хватать. Необходимо следить за температурой двигателя и обеспечить принудительную вентиляцию.
Электромагнитная совместимость
Поскольку частотный преобразователь – мощный источник высокочастотных гармоник, то для подключения двигателей нужно использовать экранированный кабель минимальной длины. Прокладку такого кабеля необходимо вести на расстоянии не менее 100 мм от других кабелей. Это минимизирует наводки. Если нужно пересечь кабели, то пересечение делается под углом 90 градусов.
Питание от аварийного генератора
Плавный пуск, который обеспечивает частотный преобразователь позволяет снизить необходимую мощность генератора. Так как при таком пуске ток снижается в 4-6 раз, то в аналогичное число раз можно снизить мощность генератора. Но все равно, между генератором и приводом должен быть установлен контактор, управляемый от релейного выхода частотного привода. Это защищает частотный преобразователь от опасных перенапряжений.
Но все равно, между генератором и приводом должен быть установлен контактор, управляемый от релейного выхода частотного привода. Это защищает частотный преобразователь от опасных перенапряжений.
Питание трехфазного преобразователя от однофазной сети
Трехфазные частотные преобразователи могут быть запитаны от однофазной сети, но при этом их выходной ток не должен превышать 50% от номинального.
Экономия электроэнергии и денег
Экономия происходит по нескольким причинам. Во-первых, за счет роста косинуса фи до значений 0.98, т.е. максимум мощности используется для совершения полезной работы, минимум уходит в потери. Во-вторых, близкий к этому коэффициент получается на всех режимах работы электродвигателя.
Без частотного преобразователя, асинхронные двигатели на малых нагрузках имеют косинус фи 0.3-0.4. В-третьих, нет необходимости в дополнительных механических регулировках (заслонках, дросселях, вентилях, тормозах и т.д.), все делается электронным образом. При таком устройстве регулирования, экономия может достигать 50%.
Синхронизация нескольких устройств
За счет дополнительных входов управления частотного привода можно синхронизировать процессы на конвейере или задавать соотношения изменения одних величин, в зависимости от других. Например, поставить в зависимость скорость вращения шпинделя станка от скорости подачи резца. Процесс будет оптимизирован, т.к. при увеличении нагрузки на резец, подача будет уменьшена и наоборот.
Защита сети от высших гармоник
Для дополнительной защиты, кроме коротких экранированных кабелей, используются сетевые дроссели и шунтирующие конденсаторы. Дроссель, кроме того, ограничивает бросок тока при включении.
Правильный выбор класса защиты
Для безотказной работы частотного привода необходим надежный теплоотвод. Если использовать высокие классы защиты, например IP 54 и выше, то трудно или дорого добиться такого теплоотвода. Поэтому, можно использовать отдельный шкаф с высоким классом защиты, куда ставить модули с меньшим классом и осуществлять общую вентиляцию и охлаждение.
Поэтому, можно использовать отдельный шкаф с высоким классом защиты, куда ставить модули с меньшим классом и осуществлять общую вентиляцию и охлаждение.
Параллельное подключение электродвигателей к одному частотному преобразователю
С целью снижения затрат, можно использовать один частотный преобразователь для управления несколькими электродвигателями. Его мощность нужно выбирать с запасом 10-15% от суммарной мощности всех электродвигателей. При этом нужно минимизировать длины моторных кабелей и очень желательно ставить моторный дроссель.
Большинство частотных преобразователей не допускают отключение или подключение двигателей с помощью контакторов во время работы частотного привода. Это производится только через команду “стоп” привода.
Задание функции регулирования
Для получения максимальных показателей работы электропривода, таких как: коэффициент мощности, коэффициент полезного действия, перегрузочная способность, плавность регулирования, долговечность, нужно правильно выбирать соотношение между изменением рабочей частоты и напряжения на выходе частотного преобразователя.
Функция изменения напряжения зависит от характера момента нагрузки. При постоянном моменте, напряжение на статоре электродвигателя должно регулироваться пропорционально частоте (скалярное регулирование U/F = const). Для вентилятора, например, другое соотношение – U/F*F = const. Если увеличиваем частоту в 2 раза, то напряжение нужно увеличить в 4 (векторное регулирование). Есть приводы и с более сложными функциями регулирования.
Преимущества использования регулируемого электропривода с частотным преобразователем
Кроме повышения КПД и энергосбережения такой электропривод позволяет получить новые качества управления. Это выражается в отказе от дополнительных механических устройств, создающих потери и снижающих надежность систем: тормозов, заслонок, дросселей, задвижек, регулирующих клапанов и т. д. Торможение, например, может быть осуществлено за счет обратного вращения электромагнитного поля в статоре электродвигателя. Меняя только функциональную зависимость между частотой и напряжением, мы получаем другой привод, не меняя ничего в механике.
д. Торможение, например, может быть осуществлено за счет обратного вращения электромагнитного поля в статоре электродвигателя. Меняя только функциональную зависимость между частотой и напряжением, мы получаем другой привод, не меняя ничего в механике.
Изучение документации
Следует заметить, что хотя частотные преобразователи похожи друг на друга и освоив один, легко разобраться с другим, тем не менее, необходимо тщательно изучать документацию. Некоторые производители накладывают ограничения на использование своей продукции, а при их нарушении снимают изделия с гарантии.
Популярные товары
Шины медные плетеные
Шины изолированные гибкие и твердые
Шинодержатели
Изоляторы
Индикаторы наличия напряжения
Частотные преобразователи — структура, принцип работы
Внимание! Приведенная ниже информация носит теоретический характер. Если Вам необходимо решить конкретную задачу или разобраться как и какое оборудование следует применить в Вашем случае, воспользуйтесь бесплатной консультацией связавшись с нами одним из указанных вверху данной страницы или на странице «Контакты» способов, либо заполните опросный лист. Инженер службы технической поддержки направит Вам рекомендации на указанный Вами адрес электронной почты.
Частотные преобразователи – это устройства, предназначенные для преобразования переменного тока (напряжения) одной частоты в переменный ток (напряжение) другой частоты.
Выходная частота в современных преобразователях может изменяться в широком диапазоне и быть как выше, так и ниже частоты питающей сети.
Схема любого преобразователя частоты состоит из силовой и управляющей частей. Силовая часть обычно выполнена на тиристорах или транзисторах, которые работают в режиме электронных ключей. Управляющая часть выполняется на цифровых микропроцессорах и обеспечивает управление силовыми электронными ключами, а также решение большого количества вспомогательных задач (контроль, диагностика, защита).
Частотные преобразователи, применяемые в регулируемом электроприводе, в зависимости от структуры и принципа работы силовой части разделяются на два класса:
- С явно выраженным промежуточным звеном постоянного тока.
- С с непосредственной связью (без промежуточного звена постоянного тока).
- Практически самый высокий КПД относительно других преобразователей (98,5% и выше).
- Способность работать с большими напряжениями и токами, что делает возможным их использование в мощных высоковольтных приводах, относительная дешевизна, несмотря на увеличение абсолютной стоимости за счет схем управления и дополнительного оборудования.
Каждый из существующих классов имеет свои достоинства и недостатки, которые определяют область рационального применения каждого из них.
Исторически первыми появились преобразователи с непосредственной связью (рис. 4.), в которых силовая часть представляет собой управляемый выпрямитель и выполнена на не запираемых тиристорах. Система управления поочередно отпирает группы тиристоров и подключает статорные обмотки двигателя к питающей сети.
Таким образом, выходное напряжение преобразователя формируется из «вырезанных» участков синусоид входного напряжения. На рис.5. показан пример формирования выходного напряжения для одной из фаз нагрузки. На входе выигрывают у тиристорных действует трехфазное синусоидальное напряжение uа, uв, uс. Выходное напряжение uвых имеет несинусоидальную «пилообразную» форму, которую условно можно аппроксимировать синусоидой (утолщенная линия). Из рисунка видно, что частота выходного напряжения не может быть равна или выше частоты питающей сети. Она находится в диапазоне от 0 до 30 Гц. Как следствие малый диапазон управления частоты вращения двигателя (не более 1: 10). Это ограничение не позволяет применять такие преобразователи в современных частотно регулируемых приводах с широким диапазоном регулирования технологических параметров.
Использование не запираемых тиристоров требует относительно сложных систем управления, которые увеличивают стоимость преобразователя.
«Резаная» синусоида на выходе преобразователя является источником высших гармоник, которые вызывают дополнительные потери в электрическом двигателе, перегрев электрической машины, снижение момента, очень сильные помехи в питающей сети. Применение компенсирующих устройств приводит к повышению стоимости, массы, габаритов, понижению к.п.д. системы в целом.
Наряду с перечисленными недостатками преобразователей с непосредственной связью, они имеют определенные достоинства. К ним относятся:
Подобные схемы преобразователей используются в старых приводах и новые конструкции их практически не разрабатываются.
Наиболее широкое применение в современных частотно регулируемых приводах находят частотники с явно выраженным звеном постоянного тока (рис. 6.)
В частотных преобразователях этого класса используется двойное преобразование электрической энергии: входное синусоидальное напряжение с постоянной амплитудой и частотой выпрямляется в выпрямителе (В), фильтруется фильтром (Ф), сглаживается, а затем вновь преобразуется инвертором (И) в переменное напряжение изменяемой частоты и амплитуды. Двойное преобразование энергии приводит к снижению к.п.д. и к некоторому ухудшению массогабаритных показателей по отношению к преобразователям с непосредственной связью.
Для формирования синусоидального переменного напряжения используются автономные инверторы напряжения и автономные инверторы тока.
В качестве электронных ключей в инверторах применяются запираемые тиристоры GTO и их усовершенствованные модификации GCT, IGCT, SGCT, и биполярные транзисторы с изолированным затвором IGBT.
Главным достоинством тиристорных преобразователей частоты, как и в схеме с непосредственной связью, является способность работать с большими токами и напряжениями, выдерживая при этом продолжительную нагрузку и импульсные воздействия.
Они имеют более высокий КПД (до 98%) по отношению к преобразователям на IGBT транзисторах (95 – 98%).
Преобразователи частоты на тиристорах в настоящее время занимают доминирующее положение в высоковольтном приводе в диапазоне мощностей от сотен киловатт и до десятков мегаватт с выходным напряжением 3 — 10 кВ и выше. Однако их цена на один кВт выходной мощности самая большая в классе высоковольтных преобразователей.
До недавнего прошлого преобразователи частоты на GTO составляли основную долю и в низковольтном частотно регулируемом приводе. Но с появлением IGBT транзисторов произошел «естественный отбор» и сегодня преобразователи на их базе общепризнанные лидеры в области низковольтного частотно регулируемого привода.
Тиристор является полууправляемым приборам: для его включения достаточно подать короткий импульс на управляющий вывод, но для выключения необходимо либо приложить к нему обратное напряжение, либо снизить коммутируемый ток до нуля. Для этого в тиристорном преобразователе частоты требуется сложная и громоздкая система управления.
Биполярные транзисторы с изолированным затвором IGBT отличают от тиристоров полная управляемость, простая не энергоемкая система управления, самая высокая рабочая частота.
Вследствие этого преобразователи частоты на IGBT позволяют расширить диапазон управления скорости вращения двигателя, повысить быстродействие привода в целом.
Для асинхронного электропривода с векторным управлением преобразователи на IGBT позволяют работать на низких скоростях без датчика обратной связи.
Применение IGBT с более высокой частотой переключения в совокупности с микропроцессорной системой управления в частотных преобразователях снижает уровень высших гармоник, характерных для тиристорных преобразователей. Как следствие меньшие добавочные потери в обмотках и магнитопроводе электродвигателя, уменьшение нагрева электрической машины, снижение пульсаций момента и исключение так называемого «шагания» ротора в области малых частот. Снижаются потери в трансформаторах, конденсаторных батареях, увеличивается их срок службы и изоляции проводов, уменьшаются количество ложных срабатываний устройств защиты и погрешности индукционных измерительных приборов.
Снижаются потери в трансформаторах, конденсаторных батареях, увеличивается их срок службы и изоляции проводов, уменьшаются количество ложных срабатываний устройств защиты и погрешности индукционных измерительных приборов.
Частотные преобразователи на транзисторах IGBT по сравнению с тиристорными преобразователями при одинаковой выходной мощности отличаются меньшими габаритами, массой, повышенной надежностью в силу модульного исполнения электронных ключей, лучшего теплоотвода с поверхности модуля и меньшего количества конструктивных элементов.
Они позволяют реализовать более полную защиту от бросков тока и от перенапряжения, что существенно снижает вероятность отказов и повреждений электропривода.
На настоящий момент низковольтные преобразователи на IGBT имеют более высокую цену на единицу выходной мощности, вследствие относительной сложности производства транзисторных модулей. Однако по соотношению цена/качество, исходя из перечисленных достоинств, они явно выигрывают у тиристорных, кроме того, на протяжении последних лет наблюдается неуклонное снижение цен на IGBT модули.
Главным препятствием на пути их использования в высоковольтном приводе с прямым преобразованием частоты и при мощностях выше 1 – 2 МВт на настоящий момент являются технологические ограничения. Увеличение коммутируемого напряжения и рабочего тока приводит к увеличению размеров транзисторного модуля, а также требует более эффективного отвода тепла от кремниевого кристалла.
Новые технологии производства биполярных транзисторов направлены на преодоление этих ограничений, и перспективность применения IGBT очень высока также и в высоковольтном приводе. В настоящее время IGBT транзисторы применяются в высоковольтных преобразователях в виде последовательно соединенных нескольких единичных модулей.
Структура и принцип работы низковольтного преобразователя частоты на IGBT транзисторах
Типовая схема низковольтного преобразователя частоты представлена на рис. 7. В нижней части рисунка изображены графики напряжений и токов на выходе каждого элемента инвертора.
7. В нижней части рисунка изображены графики напряжений и токов на выходе каждого элемента инвертора.
Переменное напряжение питающей сети (uвх.)с постоянной амплитудой и частотой (U вх = const, f вх = const) поступает на управляемый или неуправляемый выпрямитель (1).
Для сглаживания пульсаций выпрямленного напряжения (uвыпр.) используется фильтр (2). Выпрямитель и емкостный фильтр (2) образуют звено постоянного тока.
С выхода фильтра постоянное напряжение u d поступает на вход автономного импульсного инвертора (3).
Автономный инвертор современных низковольтных преобразователей, как было отмечено, выполняется на основе силовых биполярных транзисторов с изолированным затвором IGBT. На рассматриваемом рисунке изображена схема преобразователя частоты с автономным инвертором напряжения как получившая наибольшее распространение.
В инверторе осуществляется преобразование постоянного напряжения ud в трехфазное (или однофазное) импульсное напряжение u и изменяемой амплитуды и частоты. По сигналам системы управления каждая обмотка электрического двигателя подсоединяется через соответствующие силовые транзисторы инвертора к положительному и отрицательному полюсам звена постоянного тока. Длительность подключения каждой обмотки в пределах периода следования импульсов модулируется по синусоидальному закону. Наибольшая ширина импульсов обеспечивается в середине полупериода, а к началу и концу полупериода уменьшается. Таким образом, система управления обеспечивает широтно-импульсную модуляцию (ШИМ) напряжения, прикладываемого к обмоткам двигателя.Амплитуда и частота напряжения определяются параметрами модулирующей синусоидальной функции.
При высокой несущей частоте ШИМ (2 … 15 кГц) обмотки двигателя вследствие их высокой индуктивности работают как фильтр. Поэтому в них протекают практически синусоидальные токи.
В схемах преобразователей с управляемым выпрямителем (1) изменение амплитуды напряжения uи может достигаться регулированием величины постоянного напряжения ud, а изменение частоты – режимом работы инвертора.
При необходимости на выходе автономного инвертора устанавливается фильтр (4) для сглаживания пульсаций тока. (В схемах преобразователей на IGBT в силу низкого уровня высших гармоник в выходном напряжении потребность в фильтре практически отсутствует.)
Таким образом, на выходе преобразователя частоты формируется трехфазное (или однофазное) переменное напряжение изменяемой частоты и амплитуды (вых = var, f вых = var).
Сделать заказ на частотный преобразователь
Выбираем частотный преобразователь, простыми словами о сложном.
Среди множества электроприводов особо выделяются нерегулируемые приводы с асинхронными двигателями. Такие электродвигатели устанавливаются в системах кондиционирования, тепло-, водоснабжении, компрессорных установках и других отраслях. Большинство времени они работают на пониженных частотах вращения, тем самым давая слабую нагрузку на подшипники, фундаменты механизмов электродвигателей как следствие увеличивая межремонтый период.
Когда в такой цепи устанавливается частотный преобразователь, запуск двигателя производится уже через него. Частотный преобразователь позволяет плавно запустить двигатель, без пусковых ударов, это снижает нагрузку на механизмы, тем самым увеличивая срок эксплуатации.
Какие же основные параметры подбора
преобразователей частоты для асинхронного двигателя:
1.Номинальная мощность двигателя.Рабочий ток электродвигателя не должен превышать номинальный ток преобразователя частоты, поэтому выбирая частотник нужно разобраться с тем, какую нагрузку он будет получать. Нужно понимать, что для электродвигателя под мощностью понимается мощность на валу двигателя, а не как у большинства других потребителей энергии по активной потребленной энергии.
Для многих механизмов можно выбирать привод с перегрузочной способностью 150% на порядок ниже мощностью, чем двигатель, это часто применимо для вентиляторов и насосов.
Номинальный ток преобразователя берется больше номинального тока, который потребляет электродвигатель, иначе электропривод будет блокироваться по ошибке «превышение тока».
2.Частотный преобразователь для двигателя: входное напряжениеВы можете выбрать частотный преобразователь 1 фазный или 3 фазный. 1 фазное питание обычно осуществляется от сети 220 В, а 3 фазное — от сети 380 В Частотный преобразователь 3 фазный может работать и от сети 220 В, но это достаточно редкий случай.
Частотный преобразователь 1 фазный чаще используется в непромышленных условиях. А вот частотный преобразователь 3 фазный имеет больше возможностей. Он позволяет выбрать оптимальный режим работы устройства, работает при маленькой амплитуде пульсаций, надежен, долговечен и при этом компактен.
3.Частотный преобразователь для асинхронного двигателя: условия работы.В зависимости от задачи, которую будет решать наш частотный регулятор для асинхронного двигателя, нужно выбрать закон, по которому он будет работать. Законов же всего 2 – скалярный и векторный закон управления.
— Скалярный метод управления частотным преобразователем желательно применять, когда известны значения частоты вращения на валу при неизменяющейся нагрузке.
— Векторный закон управления частотником применяют при резком изменении нагрузки с динамической реакцией скорости на это изменение. Проще говоря, скорость вращения должна оставаться той же при возрастающей нагрузке и наоборот. Частотный регулятор для асинхронного двигателя с векторным управлением помогает достичь высокой точности скорости вращения двигателя без использования датчика скорости.
4.Частотный преобразователь для асинхронного двигателя: особенности.-
Возможность беспроводного управления (Bluetooth)
-
Вынос потенциометра.
-
Возможность сохранения в промышленную сеть (протокол MODMUS , CANIPEN ,PROFIBUS)
-
Возможность сохранения резервной копии настроек частотного преобразователя в панель управления.

Частотные преобразователи для асинхронных двигателей могут управляться как через выходы управления по шине последовательной связи (контроллер, или компьютер), так и с выносного встроенного пульта. Преобразователь частоты для асинхронного электродвигателя допускает также переключаемое или комбинируемое управление. Так что у потребителя есть выбор, чем пользоваться.
Выбирая преобразователь частоты для асинхронного электродвигателя, следует учитывать, что важную составляющую играет использование дросселей
Для ПЧ применяются 2 вида дросселей:
– сетевой
– моторный
Сетевой дроссель, подключается в сеть питания преобразователя, и выполняет функцию своеобразного буфера между частотником и нестабильной сетью.
Между приводом и двигателем ставиться моторный дроссель, он используется для ограничения токов КЗ а также ограничить скорость, с которой нарастает напряжение.
При использовании одного преобразователя, к которому подключается 2 и больше двигателей нужно выбрать привод на 1,25 больше номинального тока двигателей или же суммы номинальных токов двигателей.
– Характеристики пуска и разгона (торможения) двигателя выбираются по номинальному току, а также перегрузочной способностью привода..
Задача каждого производителя — это реализация производимой им продукции. Исходя из этого, большинство производителей включают в свое оборудование только минимальный функционал, который удовлетворит бОльшее количество потребителей. Дополнительные функции устанавливаются за отдельную плату. Получается, что чем большим функционалом обладает преобразователь, тем дешевле в дальнейшем будут стоять доп. опции, но сам частотник при этом подорожает. Точно так же, но с обратным эффектом будет с примитивными преобразователями частот, стоить они будут меньше но в каждую доп. опцию производитель заложит свои доп. расходы, что приведет к удорожанию модернизации привода. Плюс такие ПЧ будут менее надежными, но весь вопрос нужны ли Вам эти опции. Надежность будет меньшей из-за усложнения системы охлаждения, наличия большего количества разъемов и т.д. У большинства производителей, число опций применяемых к одному ПЧ часто ограничены.
опцию производитель заложит свои доп. расходы, что приведет к удорожанию модернизации привода. Плюс такие ПЧ будут менее надежными, но весь вопрос нужны ли Вам эти опции. Надежность будет меньшей из-за усложнения системы охлаждения, наличия большего количества разъемов и т.д. У большинства производителей, число опций применяемых к одному ПЧ часто ограничены.
Выбор преобразователя частоты, не прост, он сводится к экономической целесообразности покупки и необходимости использования такого оборудования. Следует не завышать требования, тем самым переплачивая за ненужный функционал, но в тоже время не стоит отказываться от необходимых функций, в надежде сделать механизм, привод и систему работоспособными.
Зачем двигателю переменного тока преобразователь частоты?
Что такое преобразователь частоты?
Проще говоря, преобразователь частоты — это устройство преобразования энергии. Преобразователь частоты преобразует базовую синусоидальную мощность с фиксированной частотой и фиксированным напряжением (сетевое питание) в выходной сигнал переменной частоты и переменного напряжения, используемый для управления скоростью асинхронных двигателей.
Зачем нужен преобразователь частоты?
Основная функция преобразователя частоты в водной среде — экономия энергии.За счет управления скоростью насоса вместо регулирования потока с помощью дроссельных клапанов можно значительно сэкономить энергию. Например, снижение скорости на 20% может дать экономию энергии на 50%. Ниже описывается снижение скорости и соответствующая экономия энергии. Помимо экономии энергии, значительно увеличивается срок службы крыльчатки, подшипников и уплотнений.
Преобразователи частоты
Доступные во многих различных типах преобразователи частоты предлагают оптимальный метод согласования производительности насоса и вентилятора с требованиями системы.Чаще всего используется преобразователь частоты. Он преобразует стандартную мощность предприятия (220 В или 380 В, 50 Гц) в регулируемое напряжение и частоту для питания двигателя переменного тока.
 Частота, применяемая к двигателю переменного тока, определяет скорость двигателя. Двигатели переменного тока обычно представляют собой такие же стандартные двигатели, которые могут быть подключены к сети переменного тока. За счет включения байпасных пускателей работа может поддерживаться даже в случае выхода инвертора из строя. Преобразователи частоты
Частота, применяемая к двигателю переменного тока, определяет скорость двигателя. Двигатели переменного тока обычно представляют собой такие же стандартные двигатели, которые могут быть подключены к сети переменного тока. За счет включения байпасных пускателей работа может поддерживаться даже в случае выхода инвертора из строя. Преобразователи частоты также обладают дополнительным преимуществом — увеличенным сроком службы подшипников и уплотнений насоса. Поддерживая в насосе только давление, необходимое для удовлетворения требований системы, насос не подвергается воздействию более высоких давлений, чем необходимо.Следовательно, компоненты служат дольше.
Те же преимущества, но в меньшей степени, применимы и к вентиляторам, работающим от преобразователей частоты.
Для достижения оптимальной эффективности и надежности многие специалисты по спецификациям получают от производителей подробную информацию об эффективности преобразователя частоты, требуемом техническом обслуживании, диагностических возможностях преобразователя частоты и общих рабочих характеристиках. Затем они проводят подробный анализ, чтобы определить, какая система даст наилучшую окупаемость инвестиций.
Дополнительные преимущества преобразователей частоты
Помимо экономии энергии и лучшего управления технологическим процессом преобразователи частоты могут обеспечить и другие преимущества:
- Преобразователь частоты может использоваться для управления технологической температурой, давлением или расходом без использования отдельного контроллера. Соответствующие датчики и электроника используются для сопряжения управляемого оборудования с преобразователем частоты.
- Затраты на техническое обслуживание могут быть снижены, поскольку более низкие рабочие скорости приводят к увеличению срока службы подшипников и двигателей.
-
Устранение дроссельных клапанов и заслонок также устраняет необходимость обслуживания этих устройств и всех связанных с ними элементов управления.

- Устройство плавного пуска для двигателя больше не требуется.
- Контролируемая скорость нарастания в жидкостной системе может устранить проблемы гидравлического удара.
- Способность преобразователя частоты ограничивать крутящий момент до уровня, выбранного пользователем, может защитить приводимое оборудование, которое не может выдерживать чрезмерный крутящий момент.
Анализировать систему в целом
Поскольку процесс преобразования входящей мощности с одной частоты на другую приведет к некоторым потерям, экономия энергии всегда должна происходить за счет оптимизации производительности всей системы. Первым шагом в определении потенциала энергосбережения системы является тщательный анализ работы всей системы. Чтобы обеспечить экономию энергии, необходимы подробные знания о работе оборудования и технологических требованиях. Кроме того, следует учитывать тип преобразователя частоты, предлагаемые функции и общую пригодность для применения.
Внутренняя конфигурация преобразователя частоты
Преобразователь частоты состоит из трех основных частей:
- Схема выпрямителя — состоит из диодов, тиристоров или биполярных транзисторов с изолированным затвором. Эти устройства преобразуют мощность сети переменного тока в постоянный ток.
- Шина постоянного тока — состоит из конденсаторов, которые фильтруют и накапливают заряд постоянного тока.
- Инвертор — состоит из высоковольтных мощных транзисторов, которые преобразуют мощность постоянного тока в выход переменного тока с переменной частотой и напряжением, подаваемый на нагрузку.
Преобразователи частоты также содержат мощный микропроцессор, который управляет схемой инвертора для создания почти чистого синусоидального напряжения переменной частоты, подаваемого на нагрузку. Микропроцессор также управляет конфигурациями ввода / вывода, настройками преобразователя частоты, состояниями неисправности и протоколами связи.
Энергия | Бесплатный полнотекстовый | Методика измерения импеданса асинхронных двигателей с использованием гармоник более высокого порядка
1.Введение
Большинство современных компонентов привода состоят из асинхронных двигателей, соединенных с преобразователем частоты. Поскольку промышленные преобразователи частоты в основном импульсного типа, их частота коммутации обычно превышает один килогерц. В результате образуется полный спектр высших гармоник, снижающих энергоэффективность двигателя. Таким образом, крайне важно максимально повысить энергоэффективность двигателей, работающих от преобразователей частоты, по мере роста цен на электроэнергию. Для этого необходимо проанализировать процессы, развивающиеся в асинхронном двигателе с питанием от преобразователя частоты.Вопрос о том, какие электромагнитные процессы развиваются внутри асинхронного двигателя при питании его напряжением достаточно высокой частоты, изучен недостаточно. Поскольку раньше в напряжении, подаваемом на двигатель, не было высоких частот, этот вопрос просто не задавали. Этот вопрос стал актуальным, когда появились преобразователи частоты с транзисторами IGBT в качестве переключателей. Сначала эти преобразователи были тиристорными, и их частотный диапазон гармоник напряжения был относительно низким.В публикациях того времени [1,2] в основном анализировалось влияние 5-й и 7-й гармоник на характеристики двигателя соответственно. В исследовании [3] проанализировано влияние пространственных и временных гармоник на асинхронный двигатель с питанием от преобразователя частоты. Временные гармоники были проанализированы для преобразователя, который работал без синусоидальной широтно-импульсной модуляции (ШИМ), а также без более высоких частот переключения с четырехуровневым источником питания, где преобладали в основном гармоники более низкого порядка. Следовательно, результаты, полученные в ранее упомянутых исследованиях, мало подходят для современных преобразователей частоты. В ходе исследования было сделано предположение: сопротивления статоров и роторов статичны при изменении частоты, а реактивные сопротивления выше, чем реактивное сопротивление для первой гармоники, умноженной на порядок гармоники. Другими словами, параметры для первой гармоники в эквивалентной схеме асинхронного двигателя — где индуктивные сопротивления заменены соответствующими индуктивностями — такие же, как и для гармоник более высокого порядка. Кроме того, такие же предположения сделаны в других публикациях, например [4], где рассматривается компьютерное моделирование.Эти предположения не отражают реальных процессов, происходящих в асинхронных двигателях. По мере увеличения частоты напряжения сопротивление двигателя также увеличивается по двум основным причинам. Во-первых, сопротивление ротора двигателя увеличивается, поскольку скин-эффект в роторах приводит к короткому замыканию стержней обмотки. Вторая причина заключалась в повышенном дополнительном сопротивлении из-за потерь при увеличении вихревых токов в магнитопроводе статора, который был индуктивно связан с током обмотки статора.
В ходе исследования было сделано предположение: сопротивления статоров и роторов статичны при изменении частоты, а реактивные сопротивления выше, чем реактивное сопротивление для первой гармоники, умноженной на порядок гармоники. Другими словами, параметры для первой гармоники в эквивалентной схеме асинхронного двигателя — где индуктивные сопротивления заменены соответствующими индуктивностями — такие же, как и для гармоник более высокого порядка. Кроме того, такие же предположения сделаны в других публикациях, например [4], где рассматривается компьютерное моделирование.Эти предположения не отражают реальных процессов, происходящих в асинхронных двигателях. По мере увеличения частоты напряжения сопротивление двигателя также увеличивается по двум основным причинам. Во-первых, сопротивление ротора двигателя увеличивается, поскольку скин-эффект в роторах приводит к короткому замыканию стержней обмотки. Вторая причина заключалась в повышенном дополнительном сопротивлении из-за потерь при увеличении вихревых токов в магнитопроводе статора, который был индуктивно связан с током обмотки статора.Современные преобразователи частоты используют IGBT в качестве коммутаторов. Это позволяет переключать частоты до 12 кГц. Поэтому выражаются гармоники, близкие к частоте переключения выходного напряжения преобразователей.
Имеются опубликованные исследования, в которых частота зависит от сопротивления, в то время как двигатель питается от преобразователя частоты, поскольку учитываются импульсы напряжения на выходе с законной модуляцией [5,6]. В этом исследовании предполагается, что все изменения сопротивления двигателя происходят в короткозамкнутых стержнях клетки ротора из-за скин-эффекта от протекания тока.Влияние увеличения потерь в магнитопроводе не учитывалось. Предполагалось, что соотношение активного и реактивного сопротивления двигателей остается постоянным при изменении частоты. Было заявлено, что это было определено экспериментально, хотя сам эксперимент не описывался. Экспериментальная проверка сделанных предположений заключалась в балансе мощностей: расчетная сумма активной мощности высших гармоник равнялась разнице потерь при питании от преобразователя частоты и потерь при питании от синусоидального напряжения.Не найдено публикаций, в которых обосновывались бы исследования или методика исследования устойчивости двигателей к временным гармоникам. Целью данного исследования является обоснование методологии экспериментального исследования и получение результатов, пригодных для практического использования. Большинство исследователей используют моделирование, и, к сожалению, в них индуктивности постоянны и не соответствуют частотам гармоник [7,8]. Если увеличение частоты незначительное, в то же время преобладают более низкие гармоники, изменение индуктивности также незначительно и им можно пренебречь.Для частоты, близкой к частоте коммутации современного преобразователя частоты, потери в магнитопроводе статора двигателя весьма значительны. Они настолько велики, что для частоты основного магнитного потока — например, в трансформаторе — электротехническая сталь не использовалась. Этот трансформатор потреблял бы много энергии и потреблял бы много тока из сети даже на холостом ходу. Другими словами, с увеличением частоты увеличивается потребляемый ток даже в режиме ожидания. Однако увеличение тока указывало бы на уменьшение сопротивлений, особенно индуктивного сопротивления.Можно сделать очевидный вывод, что индуктивное сопротивление не является постоянной величиной и уменьшается с увеличением частоты. Это особенно относится к частотам, выходящим за пределы частот, используемых для сердечников из электротехнической стали. В исследовании [9] проанализирована задача оптимизации закона модуляции выходного напряжения инвертора с целью уменьшения потерь, создаваемых высшими гармониками напряжения инвертора. Оптимизация была проведена путем моделирования, и индуктивности и сопротивления в эквивалентной схеме имеют постоянные значения.В публикации [10] был проанализирован уровень гармоник в различных схемах инвертора — при условии, что все другие значения были постоянными. В статье [11] представлены результаты экспериментальных исследований, в которых измерялся спектр гармоник. Однако результаты измерений не были точными, поскольку они были получены с помощью анализатора мощности сети, который измеряет только до 17-й гармоники. Это тот диапазон, в котором высшие гармоники выражены незначительно. Для этих типов измерений пригодны только анализаторы мощности преобразователей, поскольку они предназначены для измерения спектрального состава напряжений и токов преобразователей.В [12] была исследована оптимизация принципа широкополосной модуляции путем моделирования системы в приложении Simulink. В модели использована эквивалентная схема двигателя с постоянной индуктивностью. Проблемы минимизации гармонических уровней путем моделирования также исследовались в публикации [13]. Morevover, в [14], был проанализирован случай определения сопротивления — также в предположении, что параметры эквивалентной схемы не зависят от частоты. Существует не так много правил измерения сопротивления двигателя.Стандарты, например IEEE-112, предоставляют три основных теста для измерения сопротивления двигателя. Это: измерение сопротивления статоров на постоянном токе; испытания на холостом ходу (ненагруженный двигатель) с напряжением номинальной частоты и эксперимент на короткое замыкание (с подвешенным ротором) с напряжением номинальной частоты. Проблема в том, можно ли определить сопротивление двигателя — не только для основной гармоники, но и для высших гармоник — с помощью экспериментов, упомянутых выше. Очевидно, что не всегда можно провести тест на холостом ходу.Как видно из рисунка 1, частота гармоники с наибольшей амплитудой составляет около пяти килогерц. В случае двухполюсного двигателя скорость вращения будет около 300 000 мин -1 . Достичь такой скорости технически невозможно. С другой стороны, если бы эта скорость вращения была вообще возможна, измерения не имели бы никакого значения, если бы они были выполнены на скорости, при которой двигатель никогда не работал бы. Следовательно, было бы лучше провести эксперимент, когда двигатель вращается со скоростью, близкой к скорости вращения первой гармоники.У этого теста была бы цель, и некоторые исследователи ее проводят [14]. Скольжение для этой гармоники, если ротор вращается со скоростью, которая составляет всего 1% от скорости вращения гармоники, практически равно 1. Это означает, что результат измерения будет таким же, если ротор вращается, или если это будет приостановлено. Кроме того, в исследовании [15] авторы периодически переключают двигатель со значительно высокой частотой как на сеть для поддержки вращения, так и на источник гармонической частоты для измерения.Трудно определить, насколько на результат влияет наведенное напряжение переходных процессов. Из-за этого результаты эксперимента сомнительны. Следовательно, очевидно, что измерение необходимо проводить при подвешенном роторе двигателя. Проблема состоит в том, чтобы определить, следует ли проводить эксперимент с использованием трехфазного или однофазного источника питания. Очевидно, что для эксперимента достаточно однофазного источника питания, поскольку в случае симметричной трехфазной системы и с симметричной нагрузкой мощность от одной фазы к другой не передается.Следовательно, в обоих случаях для трех фаз, а также для однофазных источников питания с частотой гармоник результаты измерений будут одинаковыми. Еще одна проблема — подбор блока питания. Потому что величина магнитного потока двигателя, а также плотность магнитного потока в магнитных проводах статора и ротора двигателя зависит от напряжения источника питания. Коэффициент магнитной проницаемости ферромагнитной магнитной проволоки зависит от напряженности магнитного поля. Кроме того, индуктивность обмотки двигателя зависит от магнитного потока, который определяется напряжением источника питания.Хотя это применимо только для случая основной гармоники. Гармоники высших порядков создают только дополнительные составляющие магнитного потока и не определяют насыщение сердечника. Можно сделать вывод, что при измерении сопротивлений обмотки двигателя напряжение источника питания не имеет значения и может быть маргинальным, хотя и превышающим -намагниченность сердечника, соответствующая создаваемому перемагничиванию двигателя основной гармоники в рабочем режиме. В основном, предложенная методология измерения соответствует методике измерения индуктивности обмоток машин постоянного тока, когда индуктивность используется для измерения переменного тока, а перемагничивание выполняется постоянным током, что предусмотрено в стандарте IEEE-113 и подробно описано. в [16].Конденсатор и индуктивность используются для разделения цепей как для постоянного, так и для переменного тока, это позволяет переменному току течь через конденсатор, но постоянный ток блокируется, а индуктивность позволяет протекать постоянному току, но она резистентна к переменному току. Простая схема измерения однофазной индуктивности, в которой две другие обмотки электродвигателей намагничены, представлена на рисунке 2. Хотя эта схема имеет главный недостаток — обмотки фаз W1.1 – W2.1 и V2.1 – V1.1 — не только намагниченные фазы U1.1 – U2.1 в направлении протекания постоянного тока в статорах двигателей и магнитных проводах роторов, но и в цепи постоянного тока за счет индуцированной электродвижущей силы в создаваемой дополнительной составляющей переменного тока трансформаторной связкой, которая нагружала измеряемую цепь и вызывала ошибки измерения. Чтобы устранить эту ошибку, позже было решено измерить сопротивление обмоток обоих двигателей одновременно и разделить результат вдвое.Обмотки двигателей были подключены последовательно, в противоположном направлении, как показано на рисунке 3. Первая пара выводов измерительного прибора была подключена к началу первой фазной обмотки двигателя U1.1 – U2.1, а к концу фазы. был подключен окончание фазной обмотки второго двигателя U2.2. Ко второй паре выводов измерительного прибора подключалась фазная обмотка U2.1 начала второго двигателя. К цепи намагничивания вторичных двигателей W1.2 – W2.2 и V1.2 – V2.2 фазные обмотки были подключены последовательно по той же методике, что и для обмотки первого двигателя.Поскольку фазы двигателей U1.1 – U2.1 и U2.2 – U1.2 подключены в противоположном направлении, электродвижущая сила, создаваемая в цепи намагничивания, будет иметь противоположные направления и будет компенсировать друг друга из-за трансформатора. связь. Это связано с тем, что электрические цепи обоих двигателей взаимны, а магнитные цепи различны.Для этапов проектирования двигателя можно сделать несколько предположений, во-первых, трехфазный двигатель симметричен, во-вторых, учитываются только основные гармоники, в то время как высшие гармоники специального распределения поля и магнитодвижущей силы (MMF) в воздушном зазоре не учитываются. , в-третьих, пространственно распределенные обмотки статора и ротора заменены концентрированной катушкой, в-четвертых, эффектами анизотропии, магнитного насыщения, потерь в стали и вихревых токов пренебрегают, сопротивление пятой катушки и реактивное сопротивление принимается постоянным, шестое во многих случаях, особенно при рассмотрении в установившемся режиме ток и напряжения считаются синусоидальными.В результате на этапе проектирования асинхронного двигателя оценивается только влияние первой гармоники 50 Гц, а влияние высших гармоник для асинхронного двигателя не оценивается. Кроме того, при питании двигателя от привода с регулируемой скоростью присутствует влияние высших гармоник. Основная цель статьи — исследование и выявление влияния высших гармоник на асинхронный двигатель в динамическом режиме.
2. Материалы и методы
Учитывая вышеизложенное, было принято решение измерить сопротивление обмоток двигателя с помощью прибора Hioki LCR IM3523 (Hioki, Япония), со встроенным генератором переменного напряжения до 5 В, который можно отрегулировать в диапазоне частот от 50 Гц до 200 кГц.Базовая точность измерения сопротивления составляет 0,08%. Чтобы исключить возможное влияние тока намагничивания на результаты измерений, было решено намагничивать систему с помощью постоянного тока. Была измерена одна фаза подвесного двигателя, а две другие фазы были подключены таким образом, чтобы направление создаваемого ими магнитного потока соответствовало направлению магнитного потока измеряемой обмотки. Каждое направление обмотки намагничивания создаваемого потока составляло угол 60 ° с создаваемым потоком измеряемой обмотки, поэтому магнитный поток каждой из обмоток создавался, соответствующий 0.5 плоскости размерности потока в направлении оси измеряемой обмотки. Обе проекции были одного направления и были суммированы, а перпендикулярные проекции имели разное направление, и их сумма равнялась нулю. Следовательно, направление потока намагничивания, как упоминалось ранее, соответствует создаваемому магнитному потоку измеряемой обмотки с размером потока, равным величине тока, протекающего в измеряемой обмотке. При использовании этой схемы ток намагничивания протекает не в измеряемой цепи и не влияет на само измерение.Чтобы схема намагничивания не влияла на схему измерения через трансформатор, для эксперимента были выбраны два идентичных двигателя. Как известно, из-за передовых технологий асинхронных двигателей производства WEG разброс параметров от двигателя к двигателю незначительный, были выбраны два двухполюсных двигателя WEG производства W22 с высоким классом КПД IE2 и номинальной мощностью 0,75 кВт. Обмотки намагничивания в обоих двигателях были подключены одинаково, а измерения — в разном направлении.Следовательно, напряжения намагничивания были индуцированы в обмотках намагничивания обоих двигателей, в то время как токи, протекающие в измерительных обмотках, имели противоположные направления, и сумма напряжений в цепи намагничивания постоянного тока для обоих идентичных двигателей была равна нулю. Практически, почти равное нулю суммарное напряжение достигается из-за неизбежного разброса параметров двигателя. Поскольку магнитные провода статора и ротора имеют канавки, сопротивление обмотки в некоторой степени зависит от положения ротора и меняется по мере вращения ротора относительно статора.
Сначала было выбрано положение роторов одного из двигателей так, чтобы предварительные сопротивления обмоток соответствовали среднему значению, затем положение роторов второго двигателя было выбрано по минимуму наведенного напряжения в измерительной обмотке (желтая кривая на рис. Рисунок 4), это было сделано путем подключения обмотки намагничивания к напряжению промышленной частоты (синяя кривая на рисунке 4). После выбора положений роторы были зафиксированы и оставались неизменными в соответствии со статорами на протяжении всего эксперимента.Общий вид эксперимента с выбранными положениями ротора представлен на рисунке 3. На рисунке 3 представлены компоненты эксперимента: 1 измеритель Hioki LCR IM3523, изготовленный в Японии, 2 осциллограф Tektroix TDS 2004B, изготовленный в Орегоне, США, 3 и 4 исследуются электродвигатели WEG W22 0,75 кВт производства Бразилии и 5 блоков питания постоянного тока китайского производства. Влияние выравнивания положения роторов двигателей на остаточную электродвижущую силу показано на рисунках 4 и 5.Получаются несинусоидальные напряжения в измерительной обмотке (желтая кривая), потому что при компенсации основных гармоник напряжения высшие гармоники подвергаются воздействию.
(PDF) Моделирование преобразователя частоты, используемого для управления скоростью асинхронного двигателя
[1]
Моделирование и моделирование преобразователя частоты
, используемого для управления скоростью асинхронного двигателя
Sarvesh Prattipati Dileep Kumar Mandala
Электроника и коммуникации, Университет электротехники и электроники KL, Университет KL
Виджаявада, Индия Виджаявада, Индия
Эл. почта: sarvesh378 @ gmail.com E-mail: [email protected]
Аннотация — Управление скоростью асинхронного двигателя
очень важно в современной промышленности. Обычно для регулирования скорости используется коробка передач Gear
, которая потребляет больше энергии.
В этой статье представлено моделирование преобразователя частоты
, используемого для управления скоростью асинхронного двигателя
с помощью цифрового подхода, который имеет высокую надежность
и энергосбережение с помощью MATLAB / SimulinkTM.
Преобразователь частоты в основном используется в качестве источника переменной частоты
для регулировки скорости асинхронных двигателей
. Схема преобразователя частоты состоит из трехфазного выпрямителя
, модуля IGBT, звена постоянного тока и трехфазного инвертора
. Транзисторный трехфазный инвертор преобразует напряжение постоянного тока
в источник питания переменного напряжения и переменной частоты
(VVVF). Обычно используемую батарею конденсаторов
заменяет LC-фильтр.Индуктор и конденсатор
,используются для снижения коммутационных напряжений, так что
во время включения инвертора источника напряжения защищается от пусковых токов
. Схема смоделирована и получены выходные результаты
.
Ключевые слова — Асинхронный двигатель, ширина импульса
Модуляция (ШИМ), MATLAB / SimulinkTM, источник питания переменного напряжения и частоты (VVVF)
.
И.ВВЕДЕНИЕ
Трехфазные асинхронные двигатели — это первичные двигатели
во всех промышленных применениях в
на каждой стадии обработки и производства.
Обычно эти асинхронные двигатели
реализованы из-за низкой стоимости и надежности. Этот преобразователь
преобразует фиксированную частоту линии электропередачи
в постоянное напряжение постоянного тока через диодный трехфазный выпрямитель
.Затем инвертор преобразует фиксированную частоту
линии электропередачи в источник питания переменного напряжения и переменной частоты
(VVVF). Привод переменного тока VVVF
— это силовой электронный контроллер, используемый для управления скоростью
двигателей переменного тока мощностью 3 л.с. (синхронных или индукционных)
путем изменения частоты и напряжения, подаваемого на клеммы двигателя
.
Кроме того, этот преобразователь может поддерживать высокий коэффициент мощности
и значительно снижает помехи от источника переменного тока
для линии электропередачи сети.
Проект моделируется с использованием MATLAB /
SimulinkTM с использованием различных компонентов, таких как трехфазный выпрямитель
, звено постоянного тока и модуль IGBT
, которые составляют работу инвертора. Инвертор
должен выдавать ток двигателя в пределах допустимого уровня пульсаций тока
, который должен быть ниже
5% для большинства приложений. МОП-транзистор
может использоваться для малой мощности (до нескольких
кВт) и эффективно работать на частотах до 50 кГц.Этот
работает с низкой индуктивностью до нескольких сотен мкГн. В
, чтобы поддерживать высокие уровни мощности, такие как десятки
кВт, модули IGBT используются в качестве коммутационных устройств
и могут переключаться на частоте до 20 кГц. Они доступны в двух- или шестикомпонентных модулях
. Используемый здесь метод модуляции
— это широтно-импульсная модуляция (ШИМ).
II. МОДЕЛИРОВАНИЕ ПРОТОТИПА
Прототип в основном состоит из трехфазного выпрямителя
, промежуточного звена постоянного тока инвертора, трехфазного инвертора и асинхронного двигателя
.Конструктивный аспект состоит из:
A. Трехфазный выпрямитель
Выпрямители часто используются в качестве компонентов
источников питания постоянного тока и систем передачи электроэнергии постоянного тока высокого напряжения
. Входные трехфазные
напряжения (1) — (3) приведены ниже:
Двигатели переменного тока, контроллеры и частотно-регулируемые приводы
Что такое двигатель переменного тока?
Основные сведения о двигателе переменного тока
Стандартное определение двигателя переменного тока — это электродвигатель, приводимый в действие переменным током.Двигатель переменного тока используется для преобразования электрической энергии в механическую. Эта механическая энергия создается за счет использования силы, создаваемой вращающимися магнитными полями, создаваемыми переменным током, протекающим через его катушки. Двигатель переменного тока состоит из двух основных компонентов: стационарного статора, который находится снаружи и имеет катушки, на которые подается переменный ток, и внутреннего ротора, который прикреплен к выходному валу.
Как работает двигатель переменного тока?
Основная работа двигателя переменного тока основана на принципах магнетизма.Простой двигатель переменного тока содержит катушку с проводом и два фиксированных магнита, окружающих вал. Когда электрический заряд (переменного тока) прикладывается к катушке с проволокой, она становится электромагнитом, генерирующим магнитное поле. Проще говоря, когда магниты взаимодействуют, вал и катушка проводов начинают вращаться, приводя в движение двигатель.
Обратная связь двигателя переменного тока
Для двигателей переменного токапредусмотрено два варианта управления с обратной связью. Этими вариантами являются либо резольвер двигателя переменного тока, либо энкодер двигателя переменного тока.И резольвер двигателя переменного тока, и энкодер двигателя переменного тока могут определять направление, скорость и положение выходного вала. Хотя и преобразователь двигателя переменного тока, и энкодер двигателя переменного тока предлагают одно и то же решение для различных приложений, они сильно различаются.
Резольверы двигателей переменного тока используют второй набор катушек статора, называемый трансформатором, для создания напряжения на роторе через воздушный зазор. Поскольку в резольвере отсутствуют электронные компоненты, он очень прочный и работает в широком диапазоне температур. Резольвер двигателя переменного тока также естественно устойчив к ударам благодаря своей конструкции.Резольвер часто используется в суровых условиях.
В оптическом кодировщике электродвигателя переменного тока используется затвор, который вращается для прерывания луча света, проходящего через воздушный зазор между источником света и фотодетектором. Вращение заслонки со временем вызывает износ энкодера. Этот износ снижает долговечность и надежность оптического кодировщика.
Тип приложения определяет, нужен ли преобразователь или кодировщик. Энкодеры двигателей переменного тока проще в реализации и более точны, поэтому им следует отдавать предпочтение в любом приложении.Резолвер следует выбирать только в том случае, если этого требует среда, в которой он будет использоваться.
Основные типы двигателей переменного тока
Электродвигатели переменного тока выпускаются трех различных типов: индукционные, синхронные и промышленные. Эти типы двигателей переменного тока определяются конструкцией ротора, используемого в конструкции. В линейке продуктов Anaheim Automation представлены все три типа.
Асинхронный двигатель переменного тока
Асинхронные двигатели переменного тока называются асинхронными двигателями или вращающимися трансформаторами.Этот тип двигателя переменного тока использует электромагнитную индукцию для питания вращающегося устройства, которым обычно является вал. Ротор в асинхронных двигателях переменного тока обычно вращается медленнее, чем его частота. Наведенный ток — это то, что вызывает магнитное поле, окружающее ротор этих двигателей. Этот асинхронный двигатель переменного тока имеет одну или три фазы.
Синхронный двигатель переменного тока
Синхронный двигатель обычно представляет собой двигатель переменного тока, ротор которого вращается с той же скоростью, что и переменный ток, который к нему подается.Ротор также может вращаться со скоростью, кратной величине подаваемого на него тока. Контактные кольца или постоянный магнит, на который подается ток, создают магнитное поле вокруг ротора.
Промышленный двигатель переменного тока
Промышленные двигатели переменного тока разработаны для применений, требующих трехфазного асинхронного двигателя большой мощности. Номинальная мощность промышленного двигателя превышает номинальную мощность стандартного однофазного асинхронного двигателя переменного тока. Anaheim Automation предлагает промышленные электродвигатели переменного тока мощностью от 220 до 2200 Вт в трехфазном режиме при 220 или 380 В переменного тока.
Где используются двигатели переменного тока?
В каких отраслях используются двигатели переменного тока?
Электродвигатели переменного тока в основном используются в быту из-за их относительно низких производственных затрат и долговечности, но также широко используются в промышленных приложениях.
Для чего используются двигатели переменного тока?
Асинхронные двигатели можно найти во многих бытовых приборах и приложениях, в том числе:
— Часы
— Электроинструменты
— Дисковые накопители
— Стиральные машины и другая бытовая техника
— Аудиоповоротные столы
— Вентиляторы
Их также можно найти в промышленности:
— Насосы
— Воздуходувки
— Конвейеры
— Компрессоры
Как управляются двигатели переменного тока?
Контроллеры переменного тока:
Основы
Контроллер переменного тока (иногда называемый драйвером) известен как устройство, контролирующее скорость двигателя переменного тока.Контроллер переменного тока может также упоминаться как преобразователь частоты, преобразователь частоты, преобразователь частоты и т. Д. Двигатель переменного тока получает мощность, которая в конечном итоге преобразуется контроллером переменного тока в регулируемую частоту. Этот регулируемый выход позволяет точно контролировать скорость двигателя.
Компоненты контроллера переменного тока
Обычно контроллер переменного тока состоит из трех основных частей: выпрямителя, инвертора и звена постоянного тока для их соединения.Выпрямитель преобразует входной переменный ток в постоянный ток (постоянный ток), а инвертор переключает постоянное напряжение на выходное переменное напряжение с регулируемой частотой. Инвертор также можно использовать для управления выходным током, если это необходимо. И выпрямитель, и инвертор управляются набором элементов управления для генерации определенного количества переменного напряжения и частоты, чтобы соответствовать системе двигателя переменного тока в данный момент времени.
Приложения
Контроллер переменного тока может использоваться во многих различных промышленных и коммерческих приложениях.Контроллер переменного тока, который чаще всего используется для управления вентиляторами в системах кондиционирования и отопления, позволяет лучше контролировать воздушный поток. Контроллер переменного тока также помогает регулировать скорость насосов и воздуходувок. В последнее время применяются конвейеры, краны и подъемники, станки, экструдеры, линии для производства пленки и прядильные машины для текстильного волокна.
Преимущества и недостатки
Преимущества
— Увеличивает срок службы двигателя за счет высокого коэффициента мощности
— Экономичное регулирование скорости
— Оптимизация пусковых характеристик двигателя
— Более низкие затраты на обслуживание, чем при управлении постоянным током
Недостатки
— Вырабатывает большое количество тепла и гармоник
История
Никола Тесла изобрел первый асинхронный двигатель переменного тока в 1888 году, представив более надежный и эффективный двигатель, чем двигатель постоянного тока.Однако регулирование скорости переменного тока было сложной задачей. Когда требовалось точное управление скоростью, двигатель постоянного тока стал заменой двигателя переменного тока из-за его эффективных и экономичных средств точного управления скоростью. Только в 1980-х годах регулятор скорости переменного тока стал конкурентом. Со временем технология привода переменного тока в конечном итоге превратилась в недорогого и надежного конкурента традиционному управлению постоянным током. Теперь контроллер переменного тока может управлять скоростью с полным крутящим моментом, достигаемым от 0 об / мин до максимальной номинальной скорости.
Частотно-регулируемые приводы
Основы
Частотно-регулируемый привод — это особый тип привода с регулируемой скоростью, который используется для управления скоростью двигателя переменного тока. Чтобы управлять скоростью вращения двигателя, частотно-регулируемый привод регулирует частоту подаваемой на него электроэнергии. Добавление частотно-регулируемого привода к приложению позволяет регулировать скорость двигателя в соответствии с его нагрузкой, что в конечном итоге позволяет экономить энергию.Частотно-регулируемый привод, обычно используемый во множестве приложений, работает в системах вентиляции, насосах, конвейерах и приводах станков.
Как работает частотно-регулируемый привод
Когда полное напряжение подается на двигатель переменного тока, он сначала ускоряет нагрузку и снижает крутящий момент, сохраняя ток особенно высоким, пока двигатель не достигнет полной скорости. Частотно-регулируемый привод работает иначе; он устраняет чрезмерный ток, контролируемое повышение напряжения и частоты при запуске двигателя.Это позволяет двигателю переменного тока генерировать до 150% от номинального крутящего момента, который потенциально может быть создан с самого начала, вплоть до полной скорости, без потерь энергии. Частотно-регулируемый привод преобразует мощность через три различных этапа. Сначала мощность переменного тока преобразуется в мощность постоянного тока, а затем включаются и выключаются силовые транзисторы, вызывая форму волны напряжения на желаемой частоте. Эта форма сигнала затем регулирует выходное напряжение в соответствии с предпочтительным обозначенным значением.
Физические свойства
Обычно система частотно-регулируемого привода включает двигатель переменного тока, контроллер и интерфейс оператора.Трехфазный асинхронный двигатель чаще всего применяется в частотно-регулируемом приводе, поскольку он обеспечивает универсальность и экономичность по сравнению с однофазным или синхронным двигателем. Хотя в некоторых случаях они могут быть полезными, в системе частотно-регулируемого привода часто используются двигатели, предназначенные для работы с фиксированной скоростью.
Интерфейсы оператора частотно-регулируемого привода позволяют пользователю регулировать рабочую скорость, а также запускать и останавливать двигатель. Интерфейс оператора может также позволить пользователю переключаться и реверсировать между автоматическим управлением или ручным регулированием скорости.
Преимущества частотно-регулируемого привода
— Температуру технологического процесса можно регулировать без отдельного контроллера
— Низкие затраты на обслуживание
— Более длительный срок службы двигателя переменного тока и другого оборудования
— Более низкие эксплуатационные расходы
— Оборудование в системе, с которым невозможно справиться защита от чрезмерного крутящего момента
Типы частотно-регулируемых приводов
Существует три распространенных частотно-регулируемых привода (VFD), которые обладают как преимуществами, так и недостатками в зависимости от приложения, для которого они используются.Три распространенных конструкции VFD включают: инвертор источника тока (CSI), инвертор источника напряжения (VSI) и широтно-импульсную модуляцию (PWM). Однако существует четвертый тип частотно-регулируемого привода, называемый векторным приводом потока, который становится все более популярным среди конечных пользователей благодаря своей функции управления с обратной связью. Каждый частотно-регулируемый привод состоит из преобразователя, звена постоянного тока и инвертора, но конструкция каждого из них зависит от привода. Хотя секции каждого частотно-регулируемого привода похожи, они требуют изменения схемы в том, как они подают частоту и напряжение на двигатель.
Инвертор источника тока (CSI)
Инвертор источника тока (CSI) — это тип частотно-регулируемого привода (VFD), который преобразует входящее напряжение переменного тока и изменяет частоту и напряжение, подаваемое на асинхронный двигатель переменного тока. Общая конфигурация этого типа частотно-регулируемого привода аналогична конфигурации других частотно-регулируемых приводов в том, что он состоит из преобразователя, звена постоянного тока и инвертора. В преобразовательной части CSI используются кремниевые выпрямители (SCR), тиристоры с коммутацией затвора (GCT) или симметричные тиристоры с коммутацией затвора (SGCT) для преобразования входящего переменного напряжения в переменное постоянное напряжение.Для поддержания правильного соотношения напряжения и частоты (Вольт / Герц) напряжение должно регулироваться путем правильной последовательности SCR. В звене постоянного тока для этого типа частотно-регулируемого привода используется индуктор для регулирования пульсаций тока и для хранения энергии, используемой двигателем. Инвертор, который отвечает за преобразование постоянного напряжения обратно в синусоидальную форму сигнала переменного тока, состоит из SCRS, тиристоров отключения затвора (GTO) или симметричных тиристоров с коммутацией затвора (SGCT). Эти тиристоры ведут себя как переключатели, которые включаются и выключаются для создания выхода с широтно-импульсной модуляцией (ШИМ), который регулирует частоту и напряжение двигателя.Частотно-регулируемые приводы CSI регулируют ток, для работы требуется большой внутренний индуктор и нагрузка двигателя. Важным примечанием к конструкциям ЧРП CSI является требование входных и выходных фильтров, которые необходимы из-за высоких гармоник на входе мощности и низкого коэффициента мощности. Чтобы обойти эту проблему, многие производители используют либо входные трансформаторы, либо реакторы и фильтры гармоник в точке общего соединения (электрическая система пользователя, подключенная к приводу), чтобы уменьшить влияние гармоник на систему привода.Из обычных приводных систем с частотно-регулируемым приводом, частотно-регулируемые приводы CSI являются единственным типом приводов, которые имеют возможность рекуперации энергии. Возможность рекуперации энергии означает, что мощность, передаваемая от двигателя обратно к источнику питания, может быть поглощена.
Преимущества CSI
• Возможность рекуперации энергии
• Простая схема
• Надежность (операция ограничения тока)
• Чистая форма кривой тока
Недостатки CSI
• Зубцы двигателя при выходе ШИМ ниже 6 Гц
• Используемые индукторы большие и дорогие
• Генерация больших гармоник мощности отправляется обратно в источник питания
• Зависит от нагрузки двигателя
• Низкий коэффициент входной мощности
Инвертор источника напряжения (VSI)
Секция преобразователя VSI аналогична секции преобразователя CSI в том, что входящее напряжение переменного тока преобразуется в напряжение постоянного тока.Отличие от секции преобразователя CSI и VSI заключается в том, что VSI использует выпрямитель на диодном мосту для преобразования напряжения переменного тока в напряжение постоянного тока. В звене постоянного тока VSI используются конденсаторы для сглаживания пульсаций постоянного напряжения, а также для хранения энергии для системы привода. Секция инвертора состоит из биполярных транзисторов с изолированным затвором (IGBT), тиристоров с изолированным затвором (IGCT) или транзисторов с инжекционным затвором (IEGT). Эти транзисторы или тиристоры ведут себя как переключатели, которые включаются и выключаются для создания выходного сигнала широтно-импульсной модуляции (ШИМ), который регулирует частоту и напряжение двигателя.
Преимущества VSI
• Простая схема
• Может использоваться в приложениях, требующих нескольких двигателей
• Не зависит от нагрузки
Недостатки VSI
• Генерация больших гармоник мощности в источнике питания
• Зубчатая передача двигателя, когда выходная мощность ШИМ ниже 6 Гц
• Безрегенеративный режим
• Низкий коэффициент мощности
Широтно-импульсная модуляция (ШИМ)
Частотно-регулируемый привод с широтно-импульсной модуляцией (ШИМ) является одним из наиболее часто используемых контроллеров и доказал свою эффективность с двигателями мощностью от 1/2 до 500 л.с.Большинство частотно-регулируемых приводов с ШИМ рассчитаны на работу в трехфазном режиме 230 В или 460 В и обеспечивают выходные частоты в диапазоне 2–400 Гц. Как и VSI VFD, PWM VFD использует выпрямитель на диодном мосту для преобразования входящего переменного напряжения в постоянное. В звене постоянного тока используются конденсаторы большой емкости для устранения пульсаций, возникающих после выпрямителя, и создания стабильного напряжения на шине постоянного тока. Шестиступенчатый инверторный каскад этого драйвера использует IGBT высокой мощности, которые включаются и выключаются для регулирования частоты и напряжения двигателя. Эти транзисторы управляются микропроцессором или ИС двигателя, который контролирует различные аспекты привода, чтобы обеспечить правильную последовательность.В результате на двигатель выводится сигнал синусоидальной формы. Так как же включение и выключение транзистора помогает создать синусоидальный выходной сигнал? Изменяя ширину импульса напряжения, вы получаете среднюю мощность, которая представляет собой напряжение, подаваемое на двигатель. Частота, подаваемая на двигатель, определяется количеством переходов из положительного положения в отрицательное в секунду.
Преимущество ШИМ
• Отсутствие зубчатого зацепления двигателя
• КПД от 92% до 96%
• Превосходный коэффициент входной мощности благодаря фиксированному напряжению шины постоянного тока
• Низкая начальная стоимость
• Может использоваться в приложениях, требующих нескольких двигателей
Недостатки ШИМ
• Безрегенеративный режим
• Высокочастотное переключение может вызвать нагрев двигателя и пробой изоляции.
Как выбрать двигатель переменного тока
Чтобы выбрать подходящий двигатель переменного тока для конкретного применения, необходимо определить основные характеристики.Рассчитайте требуемый момент нагрузки и рабочую скорость. Помните, что асинхронные и реверсивные двигатели нельзя регулировать; они требуют редуктора. Если это необходимо, выберите подходящее передаточное число. Затем определите частоту и напряжение питания двигателя.
Преимущества и недостатки
Преимущества двигателя переменного тока
— Низкая стоимость
— Длительный срок службы
— Высокая эффективность и надежность
— Простая конструкция
— Высокий пусковой момент (индукция)
— Отсутствие скольжения (синхронное)
Недостатки двигателя переменного тока
— Частота вызывает проскальзывания вращения (индукция)
— Необходим пусковой выключатель (индукция)
Поиск и устранение неисправностей двигателя переменного тока
ОБРАТИТЕ ВНИМАНИЕ: Техническая помощь в отношении продуктовой линейки двигателей переменного тока, а также всех продуктов, производимых или распространяемых Anaheim Automation, предоставляется бесплатно.Эта помощь предлагается, чтобы помочь клиенту в выборе продуктов Anaheim Automation для конкретного применения. Во всех случаях ответственность за определение пригодности индивидуального двигателя переменного тока для конкретной конструкции системы лежит исключительно на заказчике. Несмотря на то, что прилагаются все усилия, чтобы дать надежные рекомендации относительно линейки продуктов AC Motor, а также других продуктов для управления движением, а также для точного предоставления технических данных и иллюстраций, такие советы и документы предназначены только для справки и могут быть изменены без предварительного уведомления.
Для устранения неполадок в системе двигателя и контроллера переменного тока могут быть предприняты следующие шаги:
Шаг 1. Проверьте запах двигателя. При появлении запаха гари немедленно замените двигатель.
Шаг 2: Проверьте входное напряжение двигателя. Убедитесь, что провода не повреждены и подключен надлежащий источник питания.
Шаг 3. Прислушайтесь к громкой вибрации или скрипу. Такие шумы могут указывать на повреждение или износ подшипников. Если возможно, смажьте подшипники, в противном случае замените двигатель полностью.
Шаг 4: Проверить на перегрев. С помощью сжатого воздуха очистите двигатель от мусора, дайте ему остыть и перезапустите.
Шаг 5: Двигатели переменного тока, которые пытаются запустить, но выходят из строя, могут быть признаком плохого пускового конденсатора. Проверьте наличие каких-либо признаков утечки масла и замените конденсатор, если это так.
Шаг 6: Убедитесь, что приложение, в котором вращается двигатель, не заблокировано. Для этого отсоедините механизм и попробуйте запустить двигатель самостоятельно.
Сколько стоят изделия с электродвигателями переменного тока?
Электродвигатель переменного тока может быть разумным экономичным решением для ваших требований. Конструкционные материалы и конструкция двигателя делают системы двигателей переменного тока доступным решением. Двигатель переменного тока работает с вращающимся магнитным полем и не использует щеток. Это позволяет снизить стоимость двигателя и исключает компонент, который может со временем изнашиваться. Для работы двигателей переменного тока не требуется драйвер.Это экономит начальные затраты на установку. Сегодняшние производственные процессы делают производство двигателей переменного тока проще и быстрее, чем когда-либо. Статор изготовлен из тонких пластин, которые можно прессовать или штамповать на станке с ЧПУ. Многие другие детали можно быстро изготовить и усовершенствовать, сэкономив время и деньги! Anaheim Automation предлагает на выбор полную линейку продукции для двигателей переменного тока.
Физические свойства двигателя переменного тока
Обычно двигатель переменного тока состоит из двух основных компонентов: статора и ротора.Статор — это неподвижная часть двигателя, состоящая из нескольких тонких пластин, намотанных изолированным проводом, образующих сердечник.
Ротор соединен с выходным валом изнутри. Самый распространенный тип ротора, используемый в двигателях переменного тока, — это ротор с короткозамкнутым ротором, названный в честь его сходства с колесами для упражнений на грызунах.
Статор устанавливается внутри кожуха двигателя, ротор установлен внутри, и между ними имеется зазор, разделяющий их от соприкосновения друг с другом. Кожух представляет собой корпус двигателя, содержащий два подшипниковых узла.
Формулы для двигателя переменного тока
Синхронная скорость:
Частота:
Количество полюсов:
Мощность в лошадиных силах:
скольжение двигателя
219Глоссарий двигателей переменного тока
Двигатель переменного тока — Электродвигатель, который приводится в действие переменным током, а не постоянным током.
Переменный ток — Электрический заряд, который часто меняет направление (противоположно постоянному току, с зарядом только в одном направлении).
Центробежный переключатель — Электрический переключатель, который регулирует скорость вращения вала, работающий за счет центробежной силы, создаваемой самим валом.
Передаточное число — Передаточное число, при котором скорость двигателя уменьшается редуктором. Скорость на выходном валу равна 1 передаточному отношению x скорость двигателя.
Инвертор — Устройство, преобразующее постоянный ток в переменный. Реверс выпрямителя.
Асинхронный двигатель — Может упоминаться как асинхронный двигатель; тип двигателя переменного тока, в котором электромагнитная индукция питает ротор. Для создания крутящего момента требуется скольжение.
Скорость холостого хода — Обычно ниже синхронной скорости, это скорость, когда двигатель не несет нагрузки.
Номинальная скорость — Скорость двигателя при номинальной выходной мощности.Обычно самая востребованная скорость.
Выпрямитель — Устройство, преобразующее переменный ток в постоянный в двигателе. Они могут использоваться в качестве компонента источника питания или могут обнаруживать радиосигналы. Обычно выпрямители могут состоять из твердотельных диодов, ртутных дуговых клапанов или других веществ. Реверс инвертора.
Выпрямление — Процесс преобразования переменного тока в постоянный с помощью выпрямителя в двигателе переменного тока.
Асинхронный двигатель с расщепленной фазой — Двигатели, которые могут создавать больший пусковой крутящий момент за счет использования центробежного переключателя в сочетании со специальной пусковой обмоткой.
Крутящий момент при остановке — Максимальный крутящий момент, с которым двигатель может работать, при определенном напряжении и частоте. Превышение этого количества приведет к остановке двигателя.
Пусковой крутящий момент — крутящий момент, который мгновенно создается при запуске двигателя. Двигатель не будет работать, если нагрузка трения превышает крутящий момент.
Статический момент трения — Когда двигатель останавливается, например, тормозом, это выходной крутящий момент, необходимый для удержания нагрузки при остановке двигателя.
Синхронный двигатель — В отличие от асинхронного двигателя, он может создавать крутящий момент с синхронной скоростью без скольжения.
Синхронная скорость — Обозначается скоростью в минуту, это внутренний фактор, определяемый количеством полюсов и частотой сети.
Привод с регулируемой скоростью — Оборудование, используемое для управления частотой электроэнергии, подаваемой на двигатель переменного тока, с целью управления его скоростью вращения.
Блок-схема для систем, в которых используется двигатель переменного тока
Срок службы двигателя переменного тока
Двигатели переменного токаAnaheim Automation обычно имеют срок службы около 10 000 часов работы, при условии, что двигатели работают в надлежащих условиях и в соответствии со спецификациями.
Требуемое обслуживание двигателя переменного тока
Профилактическое обслуживание — ключ к долговечной системе электродвигателей переменного тока.Следует проводить плановую проверку. Всегда проверяйте двигатель переменного тока на предмет загрязнения и коррозии. Грязь и мусор могут закупорить воздушные каналы и уменьшить поток воздуха, что в конечном итоге приведет к сокращению срока службы изоляции и возможному отказу двигателя. Если мусор не виден явно, убедитесь, что поток воздуха постоянный и не слабый. Это также может указывать на засорение. Во влажной, влажной или влажной среде проверьте клеммы в распределительной коробке на предмет коррозии и при необходимости отремонтируйте.
Прислушайтесь к чрезмерному шуму или вибрации и почувствуйте чрезмерное тепло.Это может указывать на необходимость смазки подшипников. Примечание: Будьте осторожны при смазке подшипников, так как чрезмерная смазка может привести к грязи и маслам, забивающим воздушный поток. Обязательно найдите и удалите источник тепла для двигателя, чтобы избежать отказа системы.
Примечание. Будьте осторожны при смазке подшипников, так как чрезмерная смазка может привести к загрязнению и засорению потока воздуха маслом. Обязательно найдите и удалите источник тепла для двигателя, чтобы избежать отказа системы.
Электропроводка двигателя переменного тока
Следующая информация предназначена в качестве общего руководства для электромонтажа линейки двигателей переменного тока Anaheim Automation. Имейте в виду, что при прокладке силовой и сигнальной проводки на машине или системе излучаемый шум от близлежащих реле, трансформаторов и других электронных устройств может индуцироваться в двигателе переменного тока и сигналах энкодера, входных / выходных коммуникациях и других чувствительных низковольтных устройствах. сигналы. Это может вызвать сбои в системе.
ПРЕДУПРЕЖДЕНИЕ — В системе двигателя переменного тока может присутствовать опасное напряжение, способное вызвать травму или смерть. Соблюдайте особую осторожность при обращении, подключении, тестировании и регулировке во время установки, настройки, настройки и эксплуатации. Не делайте чрезмерных корректировок или изменений в параметрах системы двигателя переменного тока, которые могут вызвать механическую вибрацию и привести к поломке и / или потерям. После того, как система электродвигателя переменного тока подключена, не запускайте ее путем прямого включения / выключения источника питания. Частое включение / выключение питания приведет к быстрому старению компонентов системы, что сократит срок службы системы электродвигателя переменного тока.
Строго соблюдайте следующие правила:
• Следуйте схеме подключения к каждому двигателю переменного тока и / или контроллеру
• Прокладывайте силовые кабели высокого напряжения отдельно от силовых кабелей низкого напряжения.
• Отделите входную силовую проводку и силовые кабели двигателя переменного тока от проводки управления и кабелей обратной связи двигателя. Сохраняйте это разделение на всем протяжении провода.
• Используйте экранированный кабель для силовой проводки и обеспечьте заземленный зажим на 360 градусов к стене корпуса.Оставьте на вспомогательной панели место для изгибов проводов.
• Сделайте все кабельные трассы как можно короче.
• Обеспечьте достаточный воздушный поток
• Сохраняйте окружающую среду как можно более чистой
ПРИМЕЧАНИЕ: Кабели заводского изготовления рекомендуются для использования в наших системах двигателей переменного тока. Эти кабели приобретаются отдельно и предназначены для минимизации электромагнитных помех. Эти кабели рекомендуется использовать вместо кабелей, изготовленных заказчиком, чтобы оптимизировать работу системы и обеспечить дополнительную безопасность для системы электродвигателя переменного тока, а также для пользователя.
ПРЕДУПРЕЖДЕНИЕ — Во избежание поражения электрическим током выполните все монтажные и электромонтажные работы двигателя переменного тока перед подачей питания. После подачи питания на соединительные клеммы может присутствовать напряжение.
Крепление двигателя переменного тока
Следующая информация предназначена в качестве общего руководства по установке и монтажу системы электродвигателя переменного тока. ПРЕДУПРЕЖДЕНИЕ — В системе двигателя переменного тока может присутствовать опасное напряжение, способное вызвать травму или смерть.Соблюдайте особую осторожность при обращении, тестировании и регулировке во время установки, настройки и эксплуатации. При установке и монтаже очень важно учитывать проводку двигателя переменного тока. Субпанели, устанавливаемые внутри корпуса для монтажа компонентов системы, должны иметь плоскую жесткую поверхность, защищенную от ударов, вибрации, влаги, масла, паров или пыли. Помните, что двигатель переменного тока выделяет тепло во время работы; поэтому при проектировании компоновки системы следует учитывать рассеивание тепла.Размер корпуса не должен превышать максимально допустимую температуру окружающей среды. Рекомендуется устанавливать двигатель переменного тока в положение, обеспечивающее достаточный воздушный поток. Электродвигатель переменного тока должен быть устойчиво закреплен и надежно закреплен.
ПРИМЕЧАНИЕ: Между электродвигателем переменного тока и любыми другими устройствами, установленными в системе / электрической панели или шкафу, должно быть не менее 10 мм.
Чтобы соответствовать требованиям UL и CE, система электродвигателя переменного тока должна быть заземлена в заземленном проводящем корпусе, обеспечивающем защиту, как определено в стандарте EN 60529 (IEC 529) до IP55, таким образом, чтобы они были недоступны для оператора или неквалифицированного лица. .Как и любую движущуюся часть системы, двигатель переменного тока следует держать вне досягаемости оператора. Корпус NEMA 4X превосходит эти требования, обеспечивая степень защиты IP66. Чтобы улучшить соединение между шиной питания и дополнительной панелью, сконструируйте дополнительную панель из оцинкованной (не содержащей краски) стали. Кроме того, настоятельно рекомендуется защитить систему электродвигателя переменного тока от электрических помех. Шум от сигнальных проводов может вызвать механическую вибрацию и неисправности.
Экологические аспекты двигателя переменного тока
Следующие меры по охране окружающей среды и безопасности должны соблюдаться на всех этапах эксплуатации, обслуживания и ремонта системы электродвигателя переменного тока.Несоблюдение этих мер предосторожности нарушает стандарты безопасности при проектировании, производстве и предполагаемом использовании двигателя переменного тока. Обратите внимание, что даже правильно построенная система электродвигателя переменного тока, неправильно установленная и эксплуатируемая, может быть опасной. Пользователь должен соблюдать меры предосторожности в отношении нагрузки и условий эксплуатации. В конечном итоге заказчик несет ответственность за правильный выбор, установку и работу двигателя переменного тока и / или регулятора скорости.
Атмосфера, в которой используется двигатель переменного тока, должна способствовать соблюдению общих правил работы с электрическим / электронным оборудованием.Не эксплуатируйте систему электродвигателя переменного тока в присутствии легковоспламеняющихся газов, пыли, масла, пара или влаги. При использовании вне помещений двигатель переменного тока должен быть защищен от атмосферных воздействий соответствующей крышкой, обеспечивая при этом достаточный поток воздуха и охлаждение. Влага может вызвать опасность поражения электрическим током и / или вызвать поломку системы. Следует уделять должное внимание недопущению попадания любых жидкостей и паров. Свяжитесь с заводом-изготовителем, если ваше приложение требует определенных IP-адресов. Разумно устанавливать двигатель переменного тока в среде, свободной от конденсации, электрических шумов, вибрации и ударов.
Кроме того, предпочтительно работать с системой электродвигателя переменного тока в нестатической защитной среде. Открытые цепи всегда должны быть надлежащим образом ограждены и / или закрыты для предотвращения несанкционированного контакта человека с цепями под напряжением. Никакие работы не должны выполняться при включенном питании.
НЕ подключайте и не отключайте питание при включенном питании. После выключения питания подождите не менее 5 минут, прежде чем проводить инспекционные работы в системе двигателя переменного тока, потому что даже после отключения питания в конденсаторах внутренней цепи системы двигателя переменного тока будет оставаться некоторая электрическая энергия.
Планируйте установку двигателя переменного тока в конструкции системы, свободной от мусора, такого как металлический мусор от резки, сверления, нарезания резьбы и сварки, или любого другого постороннего материала, который может контактировать с схемами системы. Если не предотвратить попадание мусора в систему двигателя переменного тока, это может привести к повреждению и / или поражению электрическим током.
История электродвигателя переменного тока
Изобретение двигателя переменного тока
Асинхронные двигатели переменного тока используются в отрасли уже более 20 лет.Идея двигателя переменного тока возникла у Николы Теслы в 1880-х годах. Никола Тесла заявил, что двигателям не нужны щетки для переключения ротора. Он сказал, что они могут быть вызваны вращающимся магнитным полем. Никола Тесла обнаружил использование переменного тока, который индуцирует вращающиеся магнитные поля. Тесла подал патент США номер 416194 на работу над двигателем переменного тока. Этот тип двигателя сегодня мы называем асинхронным двигателем переменного тока.
Развитие двигателя переменного тока
Двигатель переменного тока сделал себе имя благодаря простой конструкции, простоте использования, прочной конструкции и рентабельности для множества различных применений.Достижения в области технологий позволили производителям развить идею Telsa и обеспечили большую гибкость в регулировании скорости асинхронного двигателя переменного тока. От простого фазового управления до более надежных систем с обратной связью, использующих векторно-ориентированное управление полем; Двигатель переменного тока усовершенствовался за последние сто двадцать лет.
Принадлежности для двигателей переменного тока
Для двигателя переменного тока существует широкий выбор принадлежностей. Доступные аксессуары включают тормоз, сцепление, вентилятор, разъем и кабели. Дополнительные сведения и варианты см. На странице «Аксессуары» Anaheim Automation.
Тормоза двигателя переменного тока — это система 24 В постоянного тока. Эти тормоза идеально подходят для любых удерживающих устройств, которые вы можете использовать с электродвигателем переменного тока. Тормоза электродвигателя переменного тока имеют низковольтную конструкцию для приложений, которые подвержены разряду батареи, потере энергии или длинной проводке.
Муфта двигателя переменного тока используется для управления крутящим моментом, прилагаемым к нагрузке. Муфту двигателя переменного тока также можно использовать для увеличения скорости нагрузки с высоким моментом инерции.Муфты идеально подходят для использования с электродвигателем переменного тока, когда вы хотите точно контролировать крутящий момент или медленно прикладывать мощность. Муфты электродвигателя переменного тока также помогают предотвратить резкие скачки тока.
Вентиляторы двигателя переменного тока используются для охлаждения двигателей. Обычно они не встречаются в небольших двигателях, потому что они не нужны, но чаще встречаются в более крупных асинхронных двигателях переменного тока из-за тепловыделения. Есть два типа вентиляторов, которые используются для двигателя переменного тока. Типы бывают внутренние и внешние вентиляторы. Вентиляторы электродвигателей переменного тока идеально подходят для использования, когда возникает проблема перегрева.
Кабели двигателя переменного тока могут быть изготовлены по индивидуальному заказу с поставляемым разъемом двигателя переменного тока в соответствии с заданными спецификациями. Кабели также можно приобрести в компании Anaheim Automation.
Если двигатели переменного тока не идеальны для вашего применения, вы можете рассмотреть бесщеточные двигатели постоянного тока, щеточные двигатели постоянного тока, сервоприводы или шаговые двигатели и их совместимые драйверы / контроллеры. Наряду с двигателями переменного тока Anaheim Automation предлагает коробки передач и регуляторы скорости. Дополнительные продукты Anaheim Automation предлагает: энкодеры, HMI, муфты, кабели и соединители, линейные направляющие и столы X-Y.
Настройка двигателя переменного тока
Anaheim Automation была основана в 1966 году как производитель систем управления перемещением «под ключ». Его упор на исследования и разработки обеспечил постоянное внедрение передовых продуктов управления движением, таких как линейка продуктов AC Motor. Сегодня Anaheim Automation занимает высокое место среди ведущих производителей и дистрибьюторов продукции для управления движением, и это положение усиливается ее отличной репутацией в области качественной продукции по конкурентоспособным ценам.Линия продуктов AC Motor не является исключением из целей компании.
Anaheim Automation предлагает широкий выбор стандартных двигателей переменного тока. Иногда OEM-заказчики со средним и большим количеством требований предпочитают иметь двигатель переменного тока, который настраивается или модифицируется в соответствии с их точными проектными требованиями. Иногда настройка настолько проста, как модификация вала, тормоз, масляное уплотнение для степени защиты IP65, установочные размеры, цвета проводов или этикетка. В других случаях заказчик может потребовать, чтобы двигатель переменного тока соответствовал идеальным характеристикам, таким как скорость, крутящий момент и / или напряжение.Для получения более подробной информации обсудите требования к вашему приложению с инженером по автоматизации в Анахайме.
Двигатель переменного тока Anaheim Automation
Инженеры ценят то, что линейка двигателей переменного тока Anaheim Automation может удовлетворить их стремление к творчеству, гибкости и эффективности системы. Покупатели ценят простоту «универсального магазина» и экономию затрат благодаря индивидуальной конструкции двигателя переменного тока, в то время как инженеры довольны тем, что Anaheim Automation активно участвует в решении их конкретных системных требований.
Стандартная линейка двигателей переменного тока Anaheim Automation представляет собой экономичное решение, поскольку они известны своей прочной конструкцией и отличными характеристиками. Значительный рост продаж компании явился результатом целенаправленного проектирования, дружелюбного обслуживания клиентов и профессиональной поддержки приложений, что часто превосходит ожидания клиентов в отношении выполнения их индивидуальных требований. Хотя значительная часть продаж двигателей переменного тока Anaheim Automation связана с особыми, индивидуальными требованиями или требованиями частной маркировки, компания гордится своей стандартной базой на складе, расположенной в Анахайме, Калифорния, США.Чтобы сделать индивидуальную настройку двигателя переменного тока доступной, требуется минимальное количество и / или плата за непериодическое проектирование (NRE). Свяжитесь с заводом-изготовителем для получения подробной информации, если вам потребуется специальный двигатель переменного тока в конструкции вашей системы управления движением.
Все продажи индивидуализированного или модифицированного двигателя переменного тока не подлежат отмене и возврату, и для каждого запроса клиент должен подписать соглашение NCNR. Все продажи, включая индивидуальный двигатель переменного тока, осуществляются в соответствии со стандартными положениями и условиями Anaheim Automation и заменяют любые другие явно выраженные или подразумеваемые условия, включая, помимо прочего, любые подразумеваемые гарантии.
Anaheim Automation заказывает линейку продуктов AC Motor разнообразно: компании, эксплуатирующие или проектирующие автоматизированное оборудование или процессы, которые включают в себя пищевую, косметическую или медицинскую упаковку, маркировку или требования по защите от несанкционированного вскрытия, сборку, конвейер, погрузочно-разгрузочные работы, робототехнику, специальную съемку и т. Д. проекционные эффекты, медицинская диагностика, устройства контроля и безопасности, управление потоком насоса, изготовление металла (станки с ЧПУ) и модернизация оборудования. Многие OEM-заказчики просят, чтобы мы использовали двигатели переменного тока «частной марки», чтобы их клиенты оставались верными им при обслуживании, замене и ремонте.
Тест двигателя переменного тока
Q: Какие три основных типа электродвигателей переменного тока предлагает Anaheim Automation?
A: Индукционные, синхронные и промышленные
Q: Каковы компоненты частотно-регулируемого привода?
A: Частотно-регулируемый привод включает двигатель переменного тока, контроллер и интерфейс оператора.
Q: Какой двигатель обычно используется в частотно-регулируемом приводе?
A: Трехфазный асинхронный двигатель
Q: Каковы основные компоненты двигателя переменного тока?
A: Стационарный статор, который находится снаружи и имеет катушки, на которые подается переменный ток, и внутренний ротор, прикрепленный к выходному валу.
Q: Почему необходимо подключать конденсатор к асинхронному двигателю переменного тока?
A: Любой двигатель ACP-M, считающийся однофазным асинхронным двигателем, является двигателем с конденсаторным приводом. Следовательно, для его запуска необходимо создать вращающееся магнитное поле. Конденсаторы создают источник питания с фазовым сдвигом, который необходим для создания необходимого вращательного магнитного поля. С другой стороны, трехфазные двигатели всегда подают питание с разными фазами, поэтому им не нужны конденсаторы.
Q: Что подразумевается под реверсивным двигателем, рассчитанным на 30 минут?
A: Двигатель рассчитан на оптимальную работу не более 30 минут. Если работать постоянно, двигатель перегорит.
Часто задаваемые вопросы о двигателях переменного тока:
Q: Почему следует выбрать трехфазный двигатель вместо однофазного?
A: Однофазные двигатели переменного тока мощностью более 10 л.с. (7,5 кВт) обычно не так распространены. Трехфазные двигатели менее вибрируют, что продлевает срок их службы по сравнению с однофазными двигателями той же мощности, используемыми в тех же условиях.
Q: В чем разница между частотно-регулируемым приводом и частотно-регулируемым приводом?
A: Приводы с регулируемой частотой (VFD) обычно относятся только к приводам переменного тока, в то время как приводы с регулируемой скоростью (VSD) могут относиться либо к приводу переменного тока, либо к приводу постоянного тока. VFD управляет скоростью двигателя переменного тока, изменяя частоту двигателя. С другой стороны, преобразователи частоты изменяют напряжение для управления двигателем постоянного тока.
Q: Могу ли я изменить направление вращения асинхронного двигателя переменного тока, если я подключил его, как показано в каталоге, например, ACP-M-4IK25N-AU?
A: Да, можно.Однако перед переключением направления убедитесь, что двигатель полностью остановлен. Если требуется немедленное реверсирование, реверсивный двигатель лучше подходит для данной области применения; например ACP-M-4RK25N-AU.
Q: Можно ли изменить скорость асинхронных двигателей переменного тока и реверсивных двигателей?
A: Частота источника питания определяет скорость однофазных (переменного тока) асинхронных и реверсивных двигателей. Если ваше приложение требует изменения скорости, рекомендуется использовать двигатель с регулировкой скорости.
Q: Будет ли временное хранение моего асинхронного двигателя переменного тока при температуре от 0 ° F до -20 ° F создавать какие-либо проблемы?
A: Резкие перепады температуры могут привести к конденсации влаги внутри двигателя. В этом случае компоненты могут заржаветь, что значительно сократит срок службы. Постарайтесь избежать образования конденсата.
В: Это плохо, если мой асинхронный двигатель переменного тока сильно нагревается?
A: При преобразовании электрической энергии во вращательное движение внутри двигателя выделяется тепло, что делает его горячим.Температура двигателя переменного тока равна повышению температуры, вызванному потерями в двигателе, плюс температура окружающей среды. Если температура окружающей среды составляет 85 ° F, а внутренние потери в двигателе составляют 90 ° F (32 ° C), поверхность двигателя будет 175 ° F (79 ° C). Это не типично для маленького мотора.
Q: Почему некоторые головки шестерен двигателя переменного тока выводят выходной сигнал противоположно двигателю, а другие — в том же направлении?
A: Редукторы снижают скорость двигателя от 1/3 до 1/180 (для асинхронных двигателей переменного тока.) Это снижение скорости является результатом использования нескольких передач; количество передач в зависимости от величины снижения скорости. Однако вращение последней шестерни определяет направление выходного вала.
Q: Подействуют ли на асинхронный двигатель переменного тока сильные колебания напряжения источника питания?
A: Напряжение источника питания влияет на крутящий момент, создаваемый двигателем. Крутящий момент примерно в два раза больше напряжения источника питания. Таким образом, при использовании двигателей с большими колебаниями напряжения питания важно помнить, что создаваемый крутящий момент будет изменяться.
Зачем использовать преобразователь частоты вместе с электродвигателем? — Леонардо Энергия
Стефан Фассбиндер (DKI)
Электродвигатель и электрогенератор — это одно и то же .
В принципе, любой электродвигатель также может вырабатывать электричество. Электроприводы намного опережают двигатели внутреннего сгорания, поскольку, к сожалению, автомобильный двигатель, который всасывает выхлопные газы во время торможения и спусков и преобразует их в топливо и свежий воздух, все еще не готов.Электродвигатель может обеспечить это, хотя в течение первого столетия его использования его использование в значительной степени затруднялось двумя основными недостатками:
- Электродвигатель не имеет педали акселератора.
- Розетка не имеет «водопроводного крана».
Когда электродвигатель работает, он генерирует напряжение с полярностью, противоположной питающему напряжению .
Следовательно, ток чрезмерно высокий при первом включении, когда двигатель еще не работает.Для больших двигателей необходимо принять меры предосторожности, чтобы не повредить их и не сгореть предохранители. По мере увеличения скорости двигателя это индуцированное напряжение увеличивается. Фактически, при превышении скорости, при которой приложенное напряжение и напряжение сети равны, двигатель будет генерировать более высокое напряжение, чем напряжение в линии. Ток будет течь в обратном направлении, и двигатель изменит свою функцию на функцию генератора.
Это хорошо, так как предлагает отличные преимущества в области энергоэффективности , особенно для кранов, лифтов и т. Д.которые фактически становятся электростанциями при движении вниз. Что не так хорошо, так это то, что линия всегда имеет примерно одинаковое напряжение, но по отношению к другим нагрузкам, например огни, это должно быть так. Следовательно, положения должны быть предусмотрены снова, если скорость двигателя должна быть изменена . Раньше это было обременительной задачей. Приходилось использовать трансформаторы с несколькими ответвлениями, например, в локомотивах, но это было громоздкое и дорогое решение, или ограничивать ток резисторами, например, в трамваях, что было неэффективным решением.
А с двигателями переменного тока , однофазными или трехфазными, все становится еще сложнее. Принцип электродвигателя всегда заключается в создании вращательного движения за счет притяжения и отталкивания магнитных сил. В строгих терминах физики электродвигателей даже не существует, но все они должны быть названы магнитными двигателями с точки зрения пуриста: электрический магнит притягивает другой — также электрический или постоянный — магнит, пока он не подойдет как можно ближе как может быть.Затем полярность тока в (одном из) электрического магнита (-ов) инвертируется, и сила притяжения превращается в отталкивающую. Механическая конструкция двигателя устроена так, чтобы допускать такое движение только по кругу, поскольку требуется вращательное движение. Двигатели переменного тока могут быть построены проще, чем двигатели постоянного тока, потому что периодическая смена полярности происходит в любом случае и не должна генерироваться внутри машины.
Но становится очевидным, что изменение скорости вращения трудно для двигателей постоянного тока , так как оно в значительной степени зависит от питающего напряжения, которое приблизительно стабильно, и невозможно для двигателей переменного тока, скорость которых строго совпадает с частотой сеть, которая с технической точки зрения полностью стабильна.
Теперь любой тип электродвигателя должен быть спроектирован таким образом, чтобы при желаемой (номинальной) скорости генерируемое в двигателе напряжение было примерно таким же, как приложенное (номинальное) рабочее напряжение. В двигателях постоянного тока индуцированное напряжение должно быть несколько ниже, чем в линии. При нагрузке двигатель постоянного тока немного теряет скорость, что приводит к дальнейшему падению наведенного напряжения и, следовательно, к большей разнице между линейным напряжением и более высокому входному току, соответствующему более высокой нагрузке. Таким образом, он адаптируется (более или менее) по своей природе к изменяющейся нагрузке.
Это преимущество перед двигателем внутреннего сгорания и одно из существенных отличий в рабочих характеристиках, которые будут обсуждаться здесь. Представьте, что вы выключаете двигатель автомобиля и кладете кирпич на педаль акселератора. Вы не должны этого делать. Электродвигатель, однако, не будет возражать против работы на полном напряжении без нагрузки — за исключением, возможно, одного конкретного типа — последовательно соединенной коллекторной машины. Большие блоки могут фактически быть разрушены центробежными силами, когда они питаются полным напряжением и без нагрузки.Небольшие блоки, например, используемые в кухонных приборах и т. Д. грамм. для стеклоочистителя в автомобиле иметь достаточные потери на трение, чтобы предотвратить это. Но при приложенном фиксированном питающем напряжении определенная скорость всегда будет связана с фиксированной выходной и входной мощностью. Поскольку не существует простой и понятной вещи, такой как водопроводный кран на кухне и в ванной, который можно было бы подключить к розетке для управления потоком электроэнергии, регулирование мощности и / или скорости электродвигателя было решено. сложная задача еще до изобретения силовой электроники.
В большей степени это относится к двигателям переменного тока. Скорость синхронной машины абсолютно стабильна, независимо от того, используется ли машина в качестве двигателя или генератора. Что ж, он действительно немного теряет скорость в течение очень ограниченного времени, когда, например, он переключается с нейтрального режима на двигатель, как раз до тех пор, пока фазовый угол между электрической фазой и положением ротора больше не будет «синфазным». . После этого короткого периода перехода скорость двигателя и частота сети снова будут синхронизированы.Можно представить себе этот процесс так:
Когда машина работает без нагрузки, генерируемое ею переменное напряжение высокое, когда линейное напряжение высокое, и низкое, когда линейное напряжение низкое. Они находятся в фазе друг с другом, поэтому практически в любом случае ток не течет (грубо говоря, игнорируя аспекты реактивной мощности, специалисты подчеркнут здесь).
Поскольку электрическая мощность (а также ее мгновенные значения) рассчитывается как напряжение, умноженное на ток, изменение напряжения или тока на противоположное означает изменение знака и, следовательно, изменение направления потока энергии.Теперь, когда машина работает как двигатель, генерируемое ею переменное напряжение отстает от приложенного напряжения. Оно все еще несколько ниже, когда напряжение в сети уже достигает своего пика, поэтому ток будет течь из сети в машину; так что он действует как мотор. К тому времени, когда ток, наконец, поменяет полярность, линейное напряжение также поменяется местами, поэтому мы умножаем два раза на -1 и застреваем в работе двигателя.
Когда мы приводим вал машины в движение, чтобы она работала как генератор, генерируемое им переменное напряжение опережает приложенное напряжение.Он уже снова падает, когда напряжение в сети достигает пика, поэтому ток будет течь от машины в сеть. К тому времени, как ток поменяет полярность… и так далее.
Теперь все становится трудным, когда мы переходим к обсуждению наиболее широко используемой электрической машины , асинхронного двигателя , поскольку процессы, которые ее приводят в действие, трудно представить в иллюстративной форме. Электромагниты расположены по обеим сторонам статора и ротора. Обмотки ротора закорочены и действуют как вторичные обмотки трансформатора.Магнитное поле, вращающееся в статоре, индуцирует ток в закороченных обмотках ротора, который затем создает собственное магнитное поле. Как и в синхронной машине, полюса полей статора, управляемые частотой сети, бегают по кругу и, так сказать, преследуют полюса поля ротора перед собой. Итак, ротор начинает вращаться. Асинхронный двигатель всегда будет вращаться немного медленнее, чем магнитные полюса статора. Эта небольшая разница, проскальзывание, необходима для поддержания тока в обмотках ротора и, таким образом, для сохранения магнитного поля ротора.Частота скольжения может составлять всего 1 Гц или даже меньше в большой машине, поэтому, если в 2-полюсном асинхронном двигателе, питаемом частотой 50 Гц, полюса статора вращаются со скоростью 3000 об / мин, ротор будет вращаться со скоростью 2940 об / мин. Когда вы его увеличите, он будет действовать как генератор. При 3060 / мин, скажем, при том же скольжении с обратным знаком выходной ток будет таким же, как и входной ток при 2940 / мин.
Вместе с двигателями постоянного тока, включая последовательно соединенные коллекторные двигатели, которые могут работать как от переменного, так и от постоянного тока, асинхронный трехфазный двигатель запускается самостоятельно, как только будет подано напряжение сети.Более того: это будет происходить очень резко, с многократным превышением номинального крутящего момента и потребляемого тока, как описано выше. Это следующее отличие от двигателя внутреннего сгорания, для запуска которого требуется небольшой двигатель постоянного тока.
Синхронная машина сама по себе не может запуститься. По этой и другим причинам он обычно используется только как генератор.
Кроме того, последовательная коммутаторная машина в принципе является машиной постоянного тока, но поскольку ее статор и ротор соединены последовательно, они оба меняют полярность при изменении тока, поэтому направление вращения остается прежним.Следовательно, он также может работать как двигатель переменного тока, но при использовании в качестве генератора он будет генерировать постоянный ток, полярность которого зависит от некоторого случайного остаточного магнетизма, если он не определен специальной дополнительной катушкой.
Теперь, хотя управление мощностью и скоростью двигателя внутреннего сгорания — это несложно, просто дросселируя подачу топлива, что, с другой стороны, является ужасной необходимостью, в то время как электродвигатель более или менее регулирует себя, «водопроводный кран» для электричества было окончательно изобретено в семидесятых: теперь доступны инверторы, которые преобразуют переменный ток в постоянный, а постоянный снова обратно в переменный с электронными компонентами (и очень низкими дополнительными потерями) .Выход переменного тока можно регулировать как по амплитуде, так и по частоте, чтобы адаптировать его к требованиям любого двигателя в любой желаемой точке работы. Скорость и крутящий момент теперь можно контролировать независимо друг от друга. Таким образом, инвертор преодолевает практически все недостатки электродвигателя по сравнению с любым двигателем внутреннего сгорания, в то время как преимущества остаются такими же выдающимися, как и есть, включая обратную связь по мощности (инверсия потока энергии), если используется 4-квадрантный инвертор (2 направления вращения, 2 направления вращения). направления потоков энергии).
Если изложить очень простые термины, такие инверторы создают соединение между постоянным напряжением в звене постоянного тока, когда мгновенное переменное напряжение в линии выше, чем напряжение постоянного тока в звене, что позволяет потреблять энергию, и отключает оба от каждого из них. другое, когда напряжение «снаружи» ниже. Это принцип работы двигателя. Для возврата энергии в генераторном режиме инвертор, оправдывая свое название, делает обратное: подключается, когда напряжение в сети низкое, и отключается, когда оно высокое.Таким образом, энергия может поступать в любую сторону, даже если напряжение в сети постоянно, а постоянное напряжение в промежуточной цепи также может поддерживаться на постоянном уровне, в зависимости от конструкции.
Другой конец, сторона двигателя силового электронного инвертора, несколько сложнее. Еще раз упрощая, принцип состоит в том, чтобы включать и выключать двигатель очень быстро, намного быстрее, чем это может сделать любой механический переключатель. Путем изменения отношения времени включения / выключения средний ток двигателя можно непрерывно изменять, даже если напряжение постоянного тока в промежуточной цепи поддерживается на постоянной амплитуде.Этот принцип намного сложнее и намного дороже, чем управление потоком воды в ванне с помощью водопроводного крана, но преимущества настолько очевидны, что этот принцип неуклонно распространяется во всем мире электрических приводов.
Инверторы также могут использоваться в сетях постоянного тока .
В то время как старые трамваи — а многие из них все еще существуют — вполне могли использовать свои двигатели для торможения, электроэнергия не могла быть возвращена в линии, потому что напряжение, генерируемое двигателем, было, грубо говоря, немного ниже, чем напряжение. на линии, поэтому инверсия потока мощности была невозможна.Электроэнергия, генерируемая при торможении, поглощалась резисторами и терялась в виде тепла. В настоящее время инверторы могут прерывать постоянный ток в переменный ток, переменный ток можно преобразовывать (чем меньше трансформатор, тем выше выбирается частота прерывания), выпрямлять обратно в постоянный ток и подавать обратно в воздушную линию.
Двигатель внутреннего сгорания имеет определенную номинальную выходную мощность, и все. Если вы попытаетесь получить немного больше крутящего момента, чем указано на паспортной табличке, вы просто заглушите двигатель.
Какая разница в поведении электродвигателя! Он также имеет определенную максимальную мощность и максимальный крутящий момент, но что он делает, если вы хотите большего? Это дает вам больше!
Скорость двигателя постоянного тока или асинхронного двигателя немного падает, в то время как в синхронном двигателе угол между приложенным и индуцированным напряжением становится немного больше. Оба приводят к более высокому потребляемому току, что способствует более высокому выходному крутящему моменту при примерно или точно такой же скорости, соответственно.Если вы захотите, двигатель предложит вам удвоенный номинальный крутящий момент. В зависимости от конструкции и размера двигателя он может быть более чем в 5 раз выше номинального. Единственная проблема заключается в том, что это позволяет это делать только в течение ограниченного времени, потому что чрезмерный ток генерирует избыточное тепло в двигателе, и в конечном итоге двигатель сгорит. Специальные защитные выключатели двигателя, которые регулируются в соответствии с номинальным током, прерывают ток двигателя, если номинальный ток превышается слишком долго. Лучше всего контролировать фактическую температуру двигателя.Или использовать инвертор. Его электронное управление предлагает неограниченные возможности программирования.
Итак, начнем:
- Поскольку электродвигатель запускается самостоятельно, а многие типы даже предлагают самый высокий крутящий момент (тормозной момент) в режиме покоя, в электромобиле не требуется сцепление.
- Поскольку электродвигатель обеспечивает гораздо больший крутящий момент в течение ограниченного времени, чем при непрерывной работе, в электромобиле не требуется переключение передач, поскольку транспортным средствам всегда требуется максимальная сила тяги только в течение ограниченных периодов разгона и движения в гору.
Таким образом, электродвигатель — гораздо лучший и более экологичный вариант для эксплуатации транспортного средства, чем любые двигатели внутреннего сгорания. Вместе с силовым электронным инвертором они близки к идеалу, в то время как привод внутреннего сгорания — это более или менее импровизированный способ передвижения транспортного средства, который только благодаря более чем 100-летнему опыту вместе с огромным и мощным рынком можно было оптимизировать путем: большое состояние, которое мы наблюдаем сегодня. Дальнейшего прогресса не видно.
Все, чего сейчас не хватает, — это годный аккумулятор.В этом случае весь наземный транспорт сразу перейдет на электроприводы. Везде, где есть контактный провод, электропривод уже демонстрирует свое превосходство, и еще есть потенциал.
Мораль: двигатель внутреннего сгорания и электропривод не могут быть менее похожими. Если вы хотите разобраться в электрических приводах, первое, что вам нужно сделать, это забыть все о двигателе вашего автомобиля.
Преобразователи частоты— Системы питания и средства управления
Преобразователи частоты для 400 Гц, 100 Гц, 60 Гц, 50 Гц и 25 Гц
Преобразователи частоты , также называемые преобразователями частоты , преобразуют мощность 50 Гц и 60 Гц в мощность 400 Гц.Это делается либо с помощью статического преобразователя частоты с двойным преобразованием, либо с помощью двигателя-генератора, называемого вращающимся преобразователем частоты . Преобразователи частоты — это машины, которые преобразуют мощность с одной частоты на другую. Либо с помощью статических преобразователей частоты с двойным преобразованием, либо с помощью мотор-генератора, называемого вращающимся преобразователем частоты. В методе двойного преобразования выпрямитель преобразует переменный ток в постоянный, а инвертор преобразует DC обратно в AC .В мотор-генераторной установке это достигается либо изменением скорости вращения генератора в версиях с ремнями и шкивами или коробкой передач, либо с помощью двигателей и генераторов с различным числом полюсов, работающих для достижения того же результата производства. желаемая выходная частота.
Примеры преобразователей частоты:
Однофазный преобразователь
: SFC1 серии
(однофазный статический преобразователь частоты) имеет универсальную коммуникационную платформу, позволяющую осуществлять локальный, сетевой или удаленный мониторинг и управление.Коммуникационные пакеты включают последовательный порт RS-232, а также USB. PS&C потратила много времени на разработку этого сложного коммуникационного пакета для сегодняшних технически подкованных клиентов. При добавлении батареи к SFC1 серии этот преобразователь частоты превратится в ИБП с преобразователем частоты. Статический преобразователь частоты: Фазовый преобразователь частоты серии
SFC3 использует 6- и 12-импульсную топологию, а также топологию «IGBT» для наиболее эффективного твердотельного преобразования частоты.Это усовершенствование дает преобразователям PS&C большое преимущество перед другими традиционными преобразователями. PS&C избегает использования старых технологий в наших продуктах, что позволяет этой машине поддерживать оборудование в самых экстремальных электрических условиях. Добавив батарею к Series SFC3 , этот преобразователь частоты превратится в ИБП с преобразователем частоты. Динамический регулятор частоты: DFR серии
обеспечит такую же бескомпромиссную надежность, как и все оборудование Power Systems & Controls, поскольку оно основано на нашей гибридной роторной технологии.Доступен частотный регулятор от 25 до 500 кВА. Наша приверженность качеству электроэнергии способствовала разработке этого продукта промышленного класса, который будет корректировать частоту и напряжение одновременно. Эта надежность в сочетании с долгим сроком службы дает регулятору серии DFR явное преимущество перед всеми другими регуляторами, представленными сегодня на рынке. Вращающийся преобразователь частоты: RFC серии
включает проверенную технологию мотор-генераторных установок. Вращающийся преобразователь частоты обеспечивает оборудование надежным питанием, одновременно преобразуя входное напряжение и частоту.RFC действует как вращающийся фильтр, защищающий критическую нагрузку от переходных процессов и выбросов. Как правило, это 100% эффект для отключений менее 100 мсек. Наши модели доступны с синхронным или асинхронным двигателем и предлагаются в горизонтальной или вертикальной конфигурации.Компьютеры и небольшая электроника работают с импульсными источниками питания, способными работать как на 50, так и на 60 Гц. В этом случае единственное, что вам может понадобиться, это преобразователь вилки, поскольку розетки 50 Гц не то же самое, что розетки 60 Гц по следующей причине.Поскольку 60 Гц и 50 Гц работают на разных частотах, вам не нужно подключать оборудование к неправильному источнику питания. Однако, если ваше оборудование работает от напряжения 208 В (которое используется как для 50 Гц, так и для 60 Гц), все может быть в порядке. В противном случае вы рискуете повредить оборудование или нанести себе вред. После того, как вы выпустили дым из оборудования, вы не сможете его снова вставить.
Более крупное и трехфазное оборудование не может работать на неправильной частоте. Это может вызвать повреждение или преждевременный износ оборудования.Оборудование с частотой 50 Гц не может работать с частотой 60 Гц. Если вы заставите оборудование работать за пределами проектных критериев, возникнут проблемы. Скорее всего, сразу оборудование выйдет из строя (помните дым)? Если не сразу, то со временем выйдет из строя от переутомления и перегрева. В условиях постоянно растущей мировой экономики оборудование из других частей мира все чаще используется в странах, в которых оно не производилось.
Это обычно приводит к необходимости преобразователя частоты (также называемого преобразователем частоты).Это изменит частоту местной электросети (а иногда и ее напряжение) по мере необходимости. В результате он будет совместим с требованиями к питанию оборудования, с которым вы пытаетесь работать (также называемого нагрузкой).
. . .
Для каких отраслей нужны преобразователи частоты:
Конкретные отрасли промышленности предъявляют особые требования к частоте, и это зависит от того, как они подают питание на свое оборудование. Для систем авиации и вооружения требуется 400 Гц, поэтому оборудование, используемое на земле, работающее на частоте 400 Гц, требует поддержки заземления для электрической системы.
Помимо авиации и военных, использующих 400 Гц, Rail использует 25 Гц, 91,66 Гц или 100 Гц для работы своих систем сигнализации. Судовые верфи и лодочные доки требуют преобразования энергии с берега. Суда, построенные в странах с частотой 50 Гц, имеют системы электропитания, работающие на частоте 50 Гц. В этом случае вам понадобится преобразователь частоты, который будет соответствовать электрическим потребностям строящихся, ремонтируемых или стыкованных судов. Также существует множество уникальных и / или переменных частот, необходимых в лабораториях и испытательных центрах.
Когда оборудование производится в одной стране и используется в другой, есть вероятность, что вам придется не только преобразовать напряжение, но и частоту. Наиболее распространенными частотами являются 50 Гц и 60 Гц, поскольку они используются в большинстве коммерческих машин , однако есть много приложений, не связанных с этой проблемой, которые нуждаются в преобразователях частоты. Гидроэнергия, например, производит 25 Гц.
Так ПОЧЕМУ так много разных частот? Это очень просто и связано с числом оборотов в минуту, на котором вращается основной производитель энергии. 1500 об / мин = 50 Гц , а 1800 об / мин = 60 Гц с использованием 4-полюсного синхронного генератора. С усилением глобализации мировой экономики потребность в преобразовании частоты возрастает, поскольку транснациональные корпорации из стран 60 Гц ведут больше бизнеса в странах 50 Гц и наоборот.
. . .
Технология преобразователя частоты:
Существует 2 основных типа преобразователей частоты: поворотные преобразователи частоты, изготовленные с использованием двигателя-генератора и твердотельные (статические) преобразователи частоты, изготовленные с использованием полупроводников и силовых каскадов.Роторная машина — это грубая сила в отличие от статической машины. Статический блок предназначен для непромышленных применений. При выборе преобразователя частоты необходимо учитывать и другие факторы. Одним из факторов является то, нужен ли вам преобразователь для поддержания выходной мощности, когда электросеть больше не доступна. В этом случае преобразователь также будет источником бесперебойного питания, называемым ИБП с преобразователем частоты.
Если преобразователю частоты также необходимо очистить нестабильную входную частоту, например, принять плохой частотный диапазон на входе и обеспечить стабильную выходную частоту и напряжение, следует использовать динамический регулятор частоты.Этот блок позволяет использовать очень нестабильную утилиту, производя при этом требуемый результат.
Используя опыт работы в области 400 Гц и первых мэйнфреймов, PS&C предлагает две технологии для решения этой проблемы с преобразователем частоты Frequency Converter ; Статические ( твердотельные, ) преобразователи частоты и роторные ( мотор-генератор ) преобразователи частоты. Есть несколько факторов, которые помогут определить, какое решение по преобразованию частоты подходит для вашего проекта. Группа технических специалистов PS&C поможет вам оценить ваше приложение и выбрать лучшее решение для ваших конкретных требований.
Какие существуют применения преобразователя частоты:
- В Китае открывается завод с производственным оборудованием американского производства (преобразователь 50/60 Гц).
- Небольшой аэропорт решает добавить центр обслуживания и ремонта вертолетов (преобразователь 400 Гц).
- Американский производитель закупает оборудование у европейского завода (преобразователь 50/60 Гц).
- Железная дорога решает увеличить количество путей на новые территории (преобразователь 100 / 25Гц).
Асинхронный двигатель с преобразователем частоты и синхронное частотное регулирование разницы скоростей двигателя
автор: : Enneng 2020-08-13
Асинхронное частотное регулирование двигателя и синхронное частотное регулирование разности скоростей двигателя 2019 — 10 — 28 асинхронное частотное управление скоростью двигателя, двигатель является производным от обычного асинхронного двигателя из-за адаптации к характеристикам выходной мощности инвертора, типу двигателя в пазу ротора, технологии изоляции, электромагнитной конструкции и проверке значительных изменений, особенно Вентиляционный охлаждающий двигатель, обычно присоединенный к отдельному вентилятору принудительного охлаждения, чтобы адаптироваться к двигателю во время работы на низкой скорости, эффективно рассеивать тепло и уменьшать потери двигателя на трение при высокой скорости во время работы.Общее показывает, что выходной сигнал выходной частоты источника питания преобразователя частоты, выход дисплея скорости для номера двигателя и расчетное значение выходной частоты мощности, а фактическая скорость асинхронного двигателя является большой разницей при использовании обычного асинхронного двигатель с преобразованием частоты, поскольку скольжение асинхронного двигателя определяется технологией производства двигателя, поэтому его дискретность очень велика, а изменение нагрузки напрямую влияет на скорость двигателя, чтобы точно контролировать скорость двигателя, можно использовать только для закрытых Контурное управление, фотоэлектрический кодировщик, когда блок управления, точность скорости определяется количеством импульсов кодировщика, когда управление несколькими машинами, скорость двигателя не будет иметь более строгую синхронизацию.Это врожденный асинхронный двигатель. Во-вторых, внутри ротора синхронного двигателя с преобразованием частоты с постоянным магнитом, когда после завершения пускового момента двигателя двигатель переходит в нормальный режим работы, вращающееся магнитное поле статора для привода с ротором с постоянным магнитом синхронной работы, скорость Двигатель в соответствии с номером двигателя и частотой входной мощности двигателя образуют строго соответствующее соотношение, скорость не зависит от нагрузки и других факторов.Синхронный двигатель с таким же регулированием частоты вращения присоединен к отдельно стоящему вентилятору принудительного охлаждения, чтобы адаптироваться к двигателю во время работы на низкой скорости, эффективно рассеивать тепло и уменьшать потери двигателя на трение при высокой скорости во время работы. Из-за строгого соответствия скорости двигателя и промышленной частоты точность скорости двигателя в основном зависит от точности выходной частоты преобразователя частоты, простая система управления, реализует одно управление инвертором, более высокая скорость двигателя является согласованной, также не нужен дорогой оптический энкодер для управления с обратной связью.Условия эксплуатации двигателя 1, менее 1000 метров над уровнем моря. Если вы работаете в указанном месте на высоте более 1000 метров над уровнем моря или температура охлаждающей жидкости падает с высотой, предел повышения температуры двигателя должен быть пересмотрен. 2, температура окружающей среды, самая высокая температура воздуха меняется в зависимости от сезона, но не более 40 ℃. Когда вы запускаете место с максимальной температурой выше или ниже 40 ℃, повышение температуры двигателя необходимо скорректировать. — минимальная температура воздуха 15 ℃。 Но мощность меньше 600 Вт, Или VA) Самая низкая температура коммутатора или подшипника скольжения составляет 5 ℃.Двигатель для воды в качестве охлаждающей среды, воды и воздуха при минимальной температуре 5 ℃. 3, место эксплуатации относительной влажности воздуха влажный месяц средняя максимальная относительная влажность составляет 90%, в то время как средняя минимальная температура не выше 25 ℃ в течение 4 месяцев, электрические условия: источник питания: двигатель переменного тока должен иметь возможность применять к трех -фазный источник питания 50 Гц. Формы напряжения и тока и симметрия: напряжение питания двигателя переменного тока синусоидальной формы, актуальное для многофазного двигателя, также должно быть фактической системой балансировки.Двигатель при напряжении питания ( Что касается мощности переменного тока, номинальная частота для) Рейтинг 95% Изменения между 105%, выходная мощность должна быть, все еще может поддерживать рейтинг. Когда напряжение изменяется выше, производительность двигателя позволяет отличаться от положений стандарта, но изменение напряжения выше предела и непрерывной работы, двигатель делает предел превышения температуры, допустимый больше, чем максимальное значение: номинальная мощность 1000 кВт ( Или кВА) И следующий мотор — 10 к; Номинальная мощность 1000 кВт ( Или кВА) И мотор выше — 5 к; 5, двигатель переменного тока промышленной частоты при частоте ( Уровень напряжения) При изменении рейтинга не более чем на плюс-минус 1% выходная мощность еще может поддерживать номинал.Напряжение и частота меняются (одновременно Оба значения изменяются не более чем на +/- 5% и + 1% соответственно) , если изменение положительное, то сумма не более 6%; Или оба изменения являются отрицательными или положительными и отрицательными соответственно, сумма абсолютных значений меньше 5%, выходная мощность двигателя переменного тока все еще может поддерживать номинальные значения. 6, повышение температуры двигателя: двигатель воздушного охлаждения не более 1000 м на высоте, температура при условии не более 40 ℃ с номинальной мощностью работы, от места запуска на температуре окружающего воздуха повышение температуры ограничение определяется следующим образом: a: какова причина мощности двигателя с постоянными магнитами при a: тип воздушного зазора двигателя напрямую влияет на производительность двигателя
.