Как работает частотно-регулируемый привод. Каковы основные преимущества использования ЧРП. В каких отраслях применяются частотно-регулируемые приводы. Как выбрать подходящий ЧРП для вашего оборудования.
Что такое частотно-регулируемый привод и как он работает
Частотно-регулируемый привод (ЧРП) — это система управления скоростью вращения электродвигателя. Она состоит из частотного преобразователя и асинхронного или синхронного электродвигателя.
Принцип работы ЧРП основан на изменении частоты и напряжения питания двигателя:
- Входное переменное напряжение преобразуется в постоянное с помощью выпрямителя
- Сглаживающие конденсаторы убирают пульсации
- Инвертор преобразует постоянное напряжение обратно в переменное регулируемой частоты
- Микропроцессор управляет всем процессом
Изменяя частоту выходного напряжения, ЧРП регулирует скорость вращения двигателя. При этом поддерживается оптимальное соотношение напряжение/частота для обеспечения номинального момента.

Основные преимущества использования частотно-регулируемого привода
Применение ЧРП дает ряд существенных преимуществ:
- Экономия электроэнергии до 30-50% за счет оптимизации скорости
- Плавный пуск и торможение двигателя
- Высокая точность регулирования скорости
- Увеличение срока службы оборудования
- Снижение пусковых токов и нагрузки на сеть
- Возможность удаленного управления приводом
Как это работает? ЧРП позволяет регулировать скорость в широком диапазоне, подстраивая ее под реальную нагрузку. Это дает значительную экономию энергии по сравнению с нерегулируемым приводом.
Области применения частотно-регулируемых приводов
ЧРП нашли широкое применение во многих отраслях промышленности:
- Насосное и компрессорное оборудование
- Вентиляторные установки
- Конвейерные и транспортные системы
- Станки и обрабатывающие центры
- Подъемно-транспортное оборудование
- Экструдеры и миксеры
- Центрифуги и сепараторы
Особенно эффективно применение ЧРП для механизмов с переменной нагрузкой — насосов, вентиляторов, компрессоров. Здесь экономия энергии может достигать 50% и более.

Как выбрать частотно-регулируемый привод
При выборе ЧРП необходимо учитывать следующие факторы:
- Мощность и тип электродвигателя
- Диапазон регулирования скорости
- Характер нагрузки (постоянный/переменный момент)
- Необходимость точного поддержания момента
- Условия эксплуатации (температура, влажность, вибрации)
- Требования к функциям управления и защиты
Важно правильно рассчитать мощность преобразователя с учетом перегрузок. Рекомендуется выбирать ЧРП на ступень выше по мощности, чем двигатель.
Типы частотно-регулируемых приводов
Существует три основных типа ЧРП:
- С управлением по напряжению (VSI)
- С управлением по току (CSI)
ЧРП с ШИМ имеют ряд преимуществ:
- Высокий КПД
- Хороший входной коэффициент мощности
- Широкий диапазон регулирования
- Отсутствие пульсаций момента на малых скоростях
Поэтому приводы с ШИМ получили наибольшее распространение в современной промышленности.
Эффективность применения частотно-регулируемого привода
Внедрение ЧРП позволяет достичь следующих результатов:

- Снижение энергопотребления на 30-50%
- Уменьшение пусковых токов в 4-5 раз
- Продление срока службы оборудования на 15-20%
- Сокращение затрат на ремонт и обслуживание
- Повышение качества технологических процессов
Срок окупаемости ЧРП обычно составляет от 6 месяцев до 2 лет в зависимости от условий эксплуатации.
Особенности эксплуатации частотно-регулируемых приводов
При использовании ЧРП следует учитывать некоторые особенности:
- Необходимость применения экранированных кабелей
- Установка дополнительных фильтров гармоник
- Соблюдение требований по электромагнитной совместимости
- Обеспечение надлежащего охлаждения преобразователя
- Регулярное техническое обслуживание
При правильной эксплуатации современные ЧРП имеют высокую надежность и длительный срок службы.
Таким образом, применение частотно-регулируемого привода позволяет значительно повысить энергоэффективность и управляемость электроприводов в различных отраслях промышленности. При грамотном подборе и настройке ЧРП обеспечивает существенный экономический эффект.

Частотно-регулируемый привод — принцип действия, структура. Частотный электропривод.
Главная > Инверторы > Частотно-регулируемый привод
Внимание! Приведенная ниже информация носит теоретический характер. Если Вам необходимо решить конкретную задачу или разобраться как и какое оборудование следует применить в Вашем случае, воспользуйтесь бесплатной консультацией связавшись с нами одним из указанных вверху данной страницы или на странице «Контакты» способов, либо заполните опросный лист. Инженер службы технической поддержки направит Вам рекомендации на указанный Вами адрес электронной почты.
Также обращаем Ваше внимание на то обстоятельство, что в технологических процессах, в которых нет возможности или необходимости менять скорость вращения двигателей частотные преобразователи не могут быть использованы полностью с функциональной точки зрения. Для таких технологических процессов разработано оборудование ЭнерджиСейвер. Ознакомьтесь с информацией об оборудовании ЭнерджиСейвер на нашем сайте.
Введение
Современный частотно регулируемый электропривод состоит из асинхронного или синхронного электрического двигателя и преобразователя частоты (см. рис.1.).
Электрический двигатель преобразует электрическую энергию в механическую и приводит в движение исполнительный орган технологического механизма.
Преобразователь частоты управляет электрическим двигателем и представляет собой электронное статическое устройство. На выходе преобразователя формируется электрическое напряжение с переменными амплитудой и частотой.
Название «регулируемый частотный электропривод» обусловлено тем, что регулирование скорости вращения двигателя осуществляется изменением частоты напряжения питания, подаваемого на двигатель от преобразователя частоты.
На протяжении последних 10 — 15 лет во многих отраслях мировой экономики наблюдается широкое и успешное внедрение частотно регулируемого электропривода для решения различных технологических задач.
В настоящей статье коротко описаны известные сегодня типы преобразователей частоты, применяемые в регулируемом частотном электроприводе, реализованные в них методы управления, их особенности и характеристики.
При дальнейших рассуждениях будем говорить о трехфазном частотно регулируемом электроприводе, так как он имеет наибольшее распространение в промышленности.
Скачать полный текст
Дополнительную информацию Вы сможете найти по ссылкам:
- выбор преобразователя частоты
- прайс-лист на преобразователи частоты
Если у Вас имеются сомнения какую модель выбрать, свяжитесь с нами одним из указанных на данной странице способов.
Если у Вас имеются специальные требования, мы готовы проанализировать заполненный Вами опросный лист на низковольтные ПЧ или опросный лист на высоковольтные ПЧ и порекомендовать необходимое оборудование.
Частотно-регулируемый электропривод
21980
Частотно-регулируемый, или частотно-управляемый привод (ЧРП, ЧУП) — система управления частотой вращения ротора асинхронного двигателя, которая включает в себя электродвигатель и преобразователь частоты.
Так как асинхронные двигатели могут вращаться на одной частоте, задаваемой им питающей сетью переменного тока, для управления ими используют преобразователи частоты.
Схема 1. Частотно-регулируемый привод.
Частотный преобразователь (ЧП) — это устройство, объединяющее в себе выпрямитель и инвертор. Выпрямитель преобразует переменный ток промышленной частоты в постоянный, а инвертор наоборот. Выходные тиристоры (GTO) или транзисторы (IGBT), открываясь и закрываясь при помощи электронного управления, формируют необходимое напряжение, аналогичное трехфазному. Возможность менять частоту напряжения позволяет изменять отдаваемую в нагрузку мощность не дискретно (как при механической регулировке), а непрерывно.
Преимущества применения частотно регулируемых приводов для управления АД
- Облегчает пусковой режим привода.
- Позволяет двигателю долго работать, независимо от степени загрузки.
- Обеспечивает большую точность регулировочных операций.
- Позволяет контролировать состояние отдельных узлов в цепях промышленной электрической сети. За счет этого возможно вести постоянный учет количества времени, наработанного двигателями, чтобы потом оценивать их результативность.
- Наличие электронных узлов дает возможность диагностировать неисправности в работе двигателя дистанционно.
- К устройству можно подключать различные датчики обратной связи (давления, температуры). В результате скорость вращения будет стабильна при постоянно меняющихся нагрузках.
- При пропадании сетевого напряжения включается управляемое торможение и перезапуск.

-
В результате:
- повышается уровень КПД за счет чего можно сэкономить порядка 30-35 % электроэнергии;
- количество и качество конечного продукта возрастает;
- снижается износ комплектующих механизмов;
- возрастает срок службы оборудования.
Недостатки систем частотного регулируемого привода
- Создают сильные помехи, которые мешают другой электронике функционировать. Справиться с этой проблемой поможет установка в цепи управления фильтров высокочастотных помех, которые будут снижать степень такого влияния.
- Высокая стоимость ЧРП. Однако она окупится через 2-3 года.
Отрасли применения ЧРП
Список отраслей получается обширным, сложнее найти отрасль, где бы не применялись ЧП:
Нефтедобыча и переработка: насосное оборудование, привод аппаратов воздушного охлаждения (АВО) и градирен, комплексная автоматизация различных технологических линий.
Металлургия: приводы рольгангов, конвейеров, прокатных станов, наматывающих устройств волочильных станов, насосов, вентиляторов.
Машиностроение: привод обрабатывающих станков, насосы, конвейерные линии, полиграфические машины.
Горнодобывающее и обогатительное производство: дробилки, мешалки, конвейеры, песковые и пульповые насосы.
Химическая промышленность: насосы, мешалки, грануляторы, экструдеры, центрифуги, приводы дымососов и вентиляторов, АСУ.
Пищевая промышленность: грануляторы, экструдеры, мельницы, дробилки, куттеры, жом-прессы, этикетировочные аппараты, конвейеры, технологические линии, насосы, вентиляторы.
ЖКХ: различное насосное оборудование, АСУ.
Стройкомплекс: краны, подъемные механизмы.
Транспорт: судовой привод, электротранспорт.
Как выбрать частотный преобразователь
Следует принять во внимание:
- Мощность и разновидность асинхронного электродвигателя.

- Диапазон и точность регулировки скорости.
- Необходимость точного поддержания момента и скорости вращения на валу двигателя.
- Соответствие конструкции устройства персональным пожеланиям.
СОВЕТ: если какой-то из параметров должен отвечать особым требованиям, то лучше предпочесть не потенциально подходящий частотно регулируемый электропривод, а тот, который будет классом выше.
Выполненные проекты
НПО «Винт», г. Москва. Подруливающие устройства для судового привода. Суда, оборудованные ими, получают большую маневренность при швартовке, проходе узкостей, тралении. Значительно снижается риск столкновения судов. Сокращается время разгрузки и погрузки, что дает экономию времени и денег.
ООО «Стройбезопасность», г. Тихорецк. Оснащение приводов башенных кранов. Это решение упрощает управление, дает возможность тонко регулировать скорость в большом диапазоне, приводит к отсутствию пусковых бросков тока.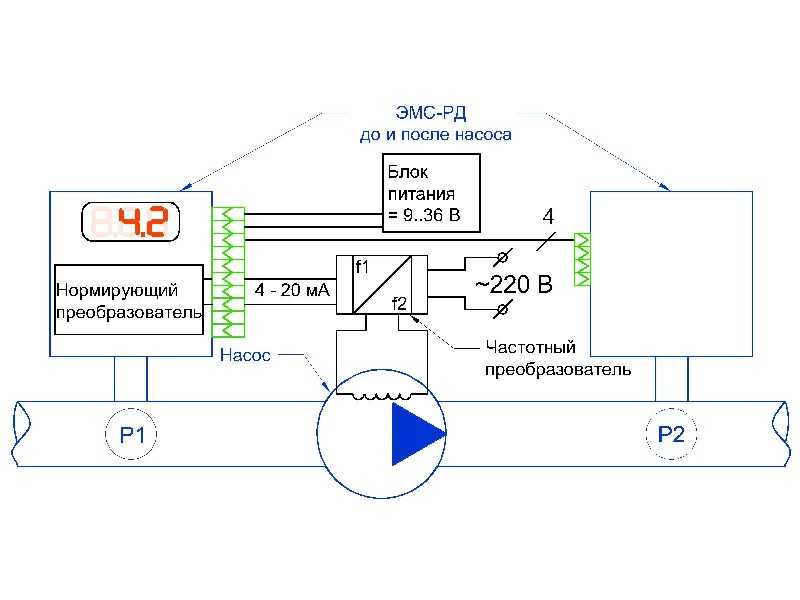
ОАО «Тагмет», г. Таганрог. Рольганги щелевой закалочной печи. Обеспечивают точный догон трубы в зоне загрузки и отрыв на выходе и безаварийную работу оборудования. Главный экономический эффект применения частотных преобразователей — это повышение качества продукции.
ОАО «Ульяновский сахарный завод», р.п. Цильна, Ульяновская обл. Привод жом-пресса 500 кВт. Регулирует обороты по нагрузке: в результате стружка подается неравномерно и не происходит перебросов при этом поддерживается нужный уровень давления в шахте. Увеличивается срок службы оборудования, снижается количество аварийных остановок, упрощается обслуживание процесса.
МУП «Водоканал», г. Новочебоксарск. Автоматизированная система оперативного диспетчерского управления (АСОДУ) водоснабжением г. Новочебоксарска. Кроме снижения прямых затрат на энергоресурсы, снизилась аварийность и улучшилось качество обслуживания.
Строительный комплекс
Машиностроение
Жилищно-коммунальное хозяйство
Нефтегазовый комплекс
Химическая промышленность
Пищевая промышленность
Металлургия
Принципы работы — приводы переменного тока с частотно-регулируемым приводом
a.
 Асинхронные двигатели переменного тока
Асинхронные двигатели переменного тока Асинхронный двигатель переменного тока имеет ротор, обмотки которого пересекаются с вращающимся магнитным полем, создаваемым обмотками статора.
При полной скорости вращения ротор вращается немного медленнее, чем синхронная скорость двигателя. Это связано с тем, что магнитное поле вызывает протекание токов в обмотках ротора и создает крутящий момент, который вращает ротор; поэтому, если ротор вращается с той же скоростью, что и магнитное поле, между ротором и магнитным полем не будет относительного движения, и крутящий момент не будет создаваться.
Величина скорости, на которую ротор отстает от вращающегося магнитного поля, называется скольжением двигателя. Чем выше скольжение, тем больше крутящий момент вырабатывается двигателем.
Скорость, с которой вращается магнитное поле, зависит от количества полюсов или катушек, распределенных вокруг статора, и частоты питающего тока. Это называется синхронной скоростью.
Синхронная скорость = 120 x частота
Количество полюсов
Типичные скорости асинхронного двигателя переменного тока: 3600, 1800, 1200 и 900 об/мин.
На следующей диаграмме показано соотношение момента и скорости типичного асинхронного двигателя.
Рис. 4. Кривая крутящего момента асинхронного двигателя.
Текстовая версия: Рисунок 4Рисунок 4
График с начальным крутящим моментом по вертикальной оси от 0 до 200 и % скорости по горизонтальной оси от 0 до 100.
Нарисованная линия начинается при начальном крутящем моменте 160 и скорости 0 % и изгибается вниз до пускового момента 125 при скорости 25 %, где она начинает изгибаться обратно вверх, пока не достигает пика пускового момента 200 при скорости 75 %. Затем на графике линия падает до 0 пускового момента при 100% скорости. Начальная нисходящая кривая помечена как «Подтягивающий крутящий момент», а спад после пика помечен как «Разрушающий крутящий момент».
б. Асинхронные двигатели переменного тока с короткозамкнутым ротором
Большинство асинхронных двигателей переменного тока представляют собой двигатели с короткозамкнутым ротором.
Обмотки ротора двигателя с короткозамкнутым ротором представляют собой стержни из алюминиевого или медного сплава, которые расположены вдоль направления вала и замыкаются концевыми кольцами, как показано на следующей схеме.
Рис. 5: Схема ротора с короткозамкнутым ротором
Форма стержней и сопротивление сплава, используемого в их конструкции, влияет на характеристики крутящего момента двигателя.
в. Частотно-регулируемые приводы с широтно-импульсной модуляцией
При работе от источника питания с постоянной частотой (обычно 60 Гц) асинхронные двигатели переменного тока являются устройствами с фиксированной скоростью.
Преобразователь частоты управляет скоростью двигателя переменного тока путем изменения частоты, подаваемой на двигатель.
Привод также регулирует выходное напряжение пропорционально выходной частоте, чтобы обеспечить относительно постоянное отношение напряжения к частоте (В/Гц), как того требуют характеристики двигателя переменного тока для создания соответствующего крутящего момента.
Первым шагом в этом процессе является преобразование переменного напряжения питания в постоянное с помощью выпрямителя. Питание постоянного тока содержит пульсации напряжения, которые сглаживаются с помощью фильтрующих конденсаторов. Этот участок частотно-регулируемого привода часто называют звеном постоянного тока.
Затем это постоянное напряжение снова преобразуется в переменное. Это преобразование обычно достигается за счет использования мощных электронных устройств, таких как силовые транзисторы IGBT, с использованием метода, называемого широтно-импульсной модуляцией (ШИМ). Выходное напряжение включается и выключается с высокой частотой, при этом продолжительность включения или ширина импульса регулируется для приближения к синусоидальной форме волны.
В более старых приводных технологиях, таких как инверторы источников тока и контроллеры переменного напряжения, в качестве управляющих устройств использовались тиристоры или тиристоры. Эти технологии теперь заменены PWM VFD.
Весь процесс контролируется микропроцессором, который контролирует:
- входящее напряжение,
- уставка скорости,
- Напряжение звена постоянного тока, Выходное напряжение и ток
- обеспечивают работу двигателя в пределах установленных параметров.
Принципиальная схема преобразователя частоты с широтно-импульсной модуляцией
График сравнения напряжения и тока для частотно-регулируемого привода с широтно-импульсной модуляцией
Рис. 6. Блок-схема типичного ЧРП с ШИМ
В простейших приводах или приложениях задание скорости — это просто уставка; однако в более сложных приложениях задание скорости поступает от контроллера процесса, такого как программируемый логический контроллер (ПЛК) или тахометр.
Предыдущий | Содержание | Далее
Принцип работы частотно-регулируемого привода (ЧРП)
История частотно-регулируемых приводов (ЧРП)
Когда Тесла впервые представил трехфазный асинхронный двигатель переменного тока в 1888 году, он знал, что его изобретение был более эффективным и надежным, чем двигатель постоянного тока Эдисона. Однако управление скоростью двигателя переменного тока требует либо изменения магнитного потока, либо изменения числа полюсов двигателя. Даже спустя десятилетия после того, как асинхронный двигатель получил широкое распространение, изменение частоты для регулирования скорости оставалось чрезвычайно сложной задачей, а физическая конструкция двигателя не позволяла производителям создавать двигатели с более чем двумя скоростями.
Однако управление скоростью двигателя переменного тока требует либо изменения магнитного потока, либо изменения числа полюсов двигателя. Даже спустя десятилетия после того, как асинхронный двигатель получил широкое распространение, изменение частоты для регулирования скорости оставалось чрезвычайно сложной задачей, а физическая конструкция двигателя не позволяла производителям создавать двигатели с более чем двумя скоростями.
В результате двигатели постоянного тока были необходимы там, где требовалась точная регулировка скорости и значительная выходная мощность. В отличие от требований к управлению скоростью двигателя переменного тока, управление скоростью двигателя постоянного тока было достигнуто путем вставки реостата в маломощную цепь возбуждения постоянного тока, что было возможно с помощью доступных технологий. Эти простые элементы управления двигателем изменяли скорость и крутящий момент и были наиболее экономичным способом сделать это в течение ряда десятилетий.
К 1980-м годам технология привода переменного тока стала достаточно надежной и недорогой, чтобы конкурировать с традиционным управлением двигателем постоянного тока. Эти частотно-регулируемые приводы (ЧРП) точно регулируют скорость стандартных асинхронных или синхронных двигателей переменного тока. При использовании частотно-регулируемых приводов управление скоростью с полным крутящим моментом достигается от 0 об/мин до максимальной номинальной скорости и, при необходимости, выше номинальной скорости при пониженном крутящем моменте. ЧРП манипулируют частотой своего выхода, выпрямляя входящий переменный ток в постоянный, а затем используя широтно-импульсную модуляцию напряжения для воссоздания формы выходного сигнала переменного тока и напряжения. Однако этот процесс преобразования частоты приводит к потерям от 2% до 3% в виде тепла в частотно-регулируемом приводе — калорийной энергии, которая должна рассеиваться. Этот процесс также приводит к всплескам перенапряжения и гармоническим искажениям тока.
Эти частотно-регулируемые приводы (ЧРП) точно регулируют скорость стандартных асинхронных или синхронных двигателей переменного тока. При использовании частотно-регулируемых приводов управление скоростью с полным крутящим моментом достигается от 0 об/мин до максимальной номинальной скорости и, при необходимости, выше номинальной скорости при пониженном крутящем моменте. ЧРП манипулируют частотой своего выхода, выпрямляя входящий переменный ток в постоянный, а затем используя широтно-импульсную модуляцию напряжения для воссоздания формы выходного сигнала переменного тока и напряжения. Однако этот процесс преобразования частоты приводит к потерям от 2% до 3% в виде тепла в частотно-регулируемом приводе — калорийной энергии, которая должна рассеиваться. Этот процесс также приводит к всплескам перенапряжения и гармоническим искажениям тока.
Типы частотно-регулируемых приводов
Существует три распространенных типа частотно-регулируемых приводов. Инверсия источника тока (CSI) успешно используется в приложениях обработки сигналов и промышленной энергетики. CSI VFD — единственный тип, который имеет возможность рекуперации энергии. Другими словами, они могут поглощать поток мощности обратно от двигателя к источнику питания. CSI VFD дают очень чистую форму волны тока, но требуют больших и дорогих катушек индуктивности в своей конструкции и вызывают зубчатую передачу (пульсирующее движение во время вращения) ниже 6 Гц.
CSI VFD — единственный тип, который имеет возможность рекуперации энергии. Другими словами, они могут поглощать поток мощности обратно от двигателя к источнику питания. CSI VFD дают очень чистую форму волны тока, но требуют больших и дорогих катушек индуктивности в своей конструкции и вызывают зубчатую передачу (пульсирующее движение во время вращения) ниже 6 Гц.
Приводы с инверсией источника напряжения (VSI) имеют низкий коэффициент мощности, могут вызвать заклинивание двигателя ниже 6 Гц и не являются рекуперативными. Следовательно, приводы CSI и VSI не получили широкого распространения.
ЧРП с широтно-импульсной модуляцией (ШИМ) чаще всего используются в промышленности из-за отличного входного коэффициента мощности благодаря фиксированному напряжению на шине постоянного тока, отсутствию зубцов двигателя, более высокому КПД и более низкой стоимости. PWM VFD использует серию импульсов напряжения различной длины для имитации синусоидальной волны. В идеале импульсы синхронизируются так, чтобы усредненный по времени интеграл привода давал идеальную синусоиду. Текущий метод выбора для создания этой формы волны пропускает треугольную волну и синусоидальную волну через компаратор и выводит импульс напряжения всякий раз, когда значение синусоидальной волны больше, чем треугольная волна. В настоящее время предпочтительным электрическим компонентом для генерации импульса напряжения является биполярный транзистор с изолированным затвором (IGBT), хотя кремниевые выпрямители (SCR) также могут работать. В ближайшем будущем для выполнения этой задачи будут использоваться транзисторы с инжекторным затвором (IEGT). В более долгосрочной перспективе мемристоры, вероятно, станут предпочтительным компонентом для этой задачи.
Текущий метод выбора для создания этой формы волны пропускает треугольную волну и синусоидальную волну через компаратор и выводит импульс напряжения всякий раз, когда значение синусоидальной волны больше, чем треугольная волна. В настоящее время предпочтительным электрическим компонентом для генерации импульса напряжения является биполярный транзистор с изолированным затвором (IGBT), хотя кремниевые выпрямители (SCR) также могут работать. В ближайшем будущем для выполнения этой задачи будут использоваться транзисторы с инжекторным затвором (IEGT). В более долгосрочной перспективе мемристоры, вероятно, станут предпочтительным компонентом для этой задачи.
Основы частотно-регулируемых приводов:
Что такое ЧРП?
Преобразователь частоты (VFD) — это тип контроллера двигателя, который приводит в действие электродвигатель путем изменения частоты и напряжения, подаваемого на электродвигатель. Другие названия частотно-регулируемого привода: привод с регулируемой скоростью , привод с регулируемой скоростью , привод с регулируемой частотой , привод переменного тока , микропривод и инвертор .
Частота (или герц) напрямую связана со скоростью двигателя (об/мин). Другими словами, чем выше частота, тем выше скорость вращения. Если приложение не требует, чтобы электродвигатель работал на полной скорости, частотно-регулируемый привод можно использовать для снижения частоты и напряжения в соответствии с требованиями нагрузки электродвигателя. По мере того, как требования к скорости двигателя меняются, ЧРП может просто увеличить или уменьшить скорость двигателя, чтобы удовлетворить требования скорости.
Как работает частотно-регулируемый привод?
Первой ступенью преобразователя частоты является преобразователь. Преобразователь состоит из шести диодов, которые аналогичны обратным клапанам, используемым в водопроводных системах. Они позволяют току течь только в одном направлении; направление, указанное стрелкой на символе диода. Например, всякий раз, когда напряжение фазы A (напряжение аналогично давлению в водопроводных системах) более положительное, чем напряжение фазы B или C, тогда этот диод открывается и пропускает ток. Когда фаза B становится более положительной, чем фаза A, диод фазы B открывается, а диод фазы A закрывается. То же самое верно для 3 диодов на отрицательной стороне шины. Таким образом, мы получаем шесть «импульсов» тока при открытии и закрытии каждого диода. Это называется «шестиимпульсный частотно-регулируемый привод», который является стандартной конфигурацией для современных частотно-регулируемых приводов.
Когда фаза B становится более положительной, чем фаза A, диод фазы B открывается, а диод фазы A закрывается. То же самое верно для 3 диодов на отрицательной стороне шины. Таким образом, мы получаем шесть «импульсов» тока при открытии и закрытии каждого диода. Это называется «шестиимпульсный частотно-регулируемый привод», который является стандартной конфигурацией для современных частотно-регулируемых приводов.
Предположим, что привод работает от сети 480В. Номинальное значение 480 В является «среднеквадратичным» или среднеквадратичным. Пики в системе 480 В составляют 679 В. Как видите, шина постоянного тока ЧРП имеет постоянное напряжение с пульсациями переменного тока. Напряжение колеблется между примерно 580В и 680В.
Мы можем избавиться от пульсаций переменного тока на шине постоянного тока, добавив конденсатор. Конденсатор работает аналогично резервуару или аккумулятору в водопроводной системе. Этот конденсатор поглощает пульсации переменного тока и выдает плавное постоянное напряжение. Пульсации переменного тока на шине постоянного тока обычно не превышают 3 вольт. Таким образом, напряжение на шине постоянного тока становится «примерно» 650 В постоянного тока. Фактическое напряжение будет зависеть от уровня напряжения линии переменного тока, питающей привод, уровня асимметрии напряжения в энергосистеме, нагрузки двигателя, импеданса энергосистемы и любых дросселей или фильтров подавления гармоник в приводе.
Пульсации переменного тока на шине постоянного тока обычно не превышают 3 вольт. Таким образом, напряжение на шине постоянного тока становится «примерно» 650 В постоянного тока. Фактическое напряжение будет зависеть от уровня напряжения линии переменного тока, питающей привод, уровня асимметрии напряжения в энергосистеме, нагрузки двигателя, импеданса энергосистемы и любых дросселей или фильтров подавления гармоник в приводе.
Преобразователь диодного моста, который преобразует переменный ток в постоянный, иногда называют просто преобразователем. Преобразователь, который преобразует постоянный ток обратно в переменный, также является преобразователем, но, чтобы отличить его от диодного преобразователя, его обычно называют «инвертором». В отрасли стало обычным называть любой преобразователь постоянного тока в переменный инвертором.
Обратите внимание, что в реальном ЧРП показанные переключатели на самом деле являются транзисторами или тиристорами.
Когда мы замыкаем один из верхних переключателей инвертора, эта фаза двигателя подключается к положительной шине постоянного тока, и напряжение на этой фазе становится положительным. Когда мы замыкаем один из нижних переключателей в преобразователе, эта фаза подключается к отрицательной шине постоянного тока и становится отрицательной. Таким образом, мы можем сделать любую фазу на двигателе положительной или отрицательной по желанию и, таким образом, можем генерировать любую частоту, которую захотим. Таким образом, мы можем сделать любую фазу положительной, отрицательной или нулевой.
Когда мы замыкаем один из нижних переключателей в преобразователе, эта фаза подключается к отрицательной шине постоянного тока и становится отрицательной. Таким образом, мы можем сделать любую фазу на двигателе положительной или отрицательной по желанию и, таким образом, можем генерировать любую частоту, которую захотим. Таким образом, мы можем сделать любую фазу положительной, отрицательной или нулевой.
Синяя синусоида показана только для сравнения. Привод не генерирует эту синусоиду.
Обратите внимание, что выходной сигнал частотно-регулируемого привода имеет «прямоугольную» форму волны. ЧРП не производят синусоидальный выходной сигнал. Эта прямоугольная форма волны не подходит для распределительной системы общего назначения, но вполне подходит для двигателя.
Если мы хотим снизить частоту двигателя до 30 Гц, то просто медленнее переключаем выходные транзисторы инвертора. Но, если мы уменьшим частоту до 30 Гц, то мы должны также уменьшить напряжение до 240 В, чтобы сохранить соотношение В/Гц. Как мы собираемся снизить напряжение, если единственное напряжение, которое у нас есть, составляет 650 В постоянного тока?
Как мы собираемся снизить напряжение, если единственное напряжение, которое у нас есть, составляет 650 В постоянного тока?
Это называется широтно-импульсной модуляцией или ШИМ. Представьте, что мы можем контролировать давление в водопроводе, включая и выключая клапан с высокой скоростью. Хотя это было бы непрактично для сантехнических систем, это очень хорошо работает для частотно-регулируемых приводов. Обратите внимание, что в течение первого полупериода напряжение включено в половине случаев и выключено в половине случаев. Таким образом, среднее напряжение составляет половину от 480В или 240В. Импульсируя выход, мы можем добиться любого среднего напряжения на выходе ЧРП.
Зачем мне использовать частотно-регулируемый привод?
Снижение энергопотребления и затрат на электроэнергию
Если у вас есть приложение, которое не требует работы на полной скорости, вы можете сократить затраты на электроэнергию, управляя двигателем с помощью частотно-регулируемого привода, который является одним из Преимущества частотно-регулируемых приводов. Преобразователи частоты позволяют согласовать скорость моторизованного оборудования с требованиями нагрузки. Не существует другого метода управления электродвигателем переменного тока, позволяющего выполнить это.
Преобразователи частоты позволяют согласовать скорость моторизованного оборудования с требованиями нагрузки. Не существует другого метода управления электродвигателем переменного тока, позволяющего выполнить это.
Системы электродвигателей сегодня обеспечивают более 65% потребляемой в промышленности энергии. Оптимизация систем управления двигателями путем установки или модернизации частотно-регулируемых приводов может снизить потребление энергии на вашем объекте на целых 70%. Кроме того, использование частотно-регулируемых приводов повышает качество продукции и снижает производственные затраты. При сочетании налоговых льгот на энергоэффективность и скидок на коммунальные услуги окупаемость инвестиций в установки ЧРП может составлять всего 6 месяцев.
Повышение производительности за счет более строгого контроля процесса
Работая с двигателями на наиболее эффективной скорости для вашего применения, вы столкнетесь с меньшим количеством ошибок и, таким образом, повысите уровень производства, что принесет вашей компании более высокие доходы. На конвейерах и лентах вы устраняете рывки при запуске, обеспечивая высокую пропускную способность.
На конвейерах и лентах вы устраняете рывки при запуске, обеспечивая высокую пропускную способность.
Увеличение срока службы оборудования и сокращение объема технического обслуживания
Ваше оборудование прослужит дольше и снизит время простоя благодаря техническому обслуживанию, если оно управляется частотно-регулируемым приводом, обеспечивающим оптимальную скорость вращения двигателя. Благодаря оптимальному управлению ЧРП частотой и напряжением двигателя, ЧРП обеспечивает лучшую защиту вашего двигателя от таких проблем, как электротермические перегрузки, фазовая защита, пониженное напряжение, перенапряжение и т. д. Когда вы запускаете нагрузку с помощью ЧРП, вы не подвергает двигатель или приводную нагрузку «мгновенному удару» при пуске через линию, но может запускаться плавно, тем самым устраняя износ ремня, шестерни и подшипников. Это также отличный способ уменьшить и/или устранить гидравлический удар, поскольку мы можем иметь плавные циклы ускорения и торможения.
