Что такое асинхронный электродвигатель. Как устроен асинхронный двигатель. Каков принцип работы асинхронного электродвигателя. Какие преимущества у асинхронных двигателей. Где применяются асинхронные электродвигатели.
Что такое асинхронный электродвигатель и как он устроен
Асинхронный электродвигатель — это электрическая машина переменного тока, в которой частота вращения ротора отличается от частоты вращения магнитного поля статора. Основными частями асинхронного двигателя являются:
- Статор — неподвижная часть с обмотками, создающими вращающееся магнитное поле
- Ротор — вращающаяся часть, в которой индуцируются токи под действием магнитного поля статора
- Корпус, подшипниковые щиты, вал и другие конструктивные элементы
Статор имеет цилиндрическую форму и собран из тонких листов электротехнической стали. В пазах статора уложена трехфазная обмотка. Ротор бывает короткозамкнутым или фазным. Короткозамкнутый ротор имеет обмотку в виде «беличьей клетки» из медных или алюминиевых стержней. Фазный ротор содержит трехфазную обмотку, выведенную на контактные кольца.
Принцип работы асинхронного электродвигателя
Принцип действия асинхронного двигателя основан на взаимодействии вращающегося магнитного поля статора с токами, индуцированными этим полем в обмотке ротора. Рассмотрим основные этапы работы:
- При подключении обмотки статора к трехфазной сети в ней создается вращающееся магнитное поле
- Магнитное поле статора пересекает проводники обмотки ротора и индуцирует в них ЭДС
- Под действием ЭДС в замкнутой обмотке ротора возникают токи
- Взаимодействие токов ротора с магнитным полем статора создает вращающий момент
- Ротор начинает вращаться в сторону вращения поля статора, но с меньшей скоростью
Скорость вращения ротора всегда меньше скорости вращения магнитного поля статора. Эта разница называется скольжением и обеспечивает индуцирование токов в роторе. При равенстве скоростей ротора и поля статора ЭДС в роторе не индуцировалась бы и двигатель остановился.
Преимущества асинхронных электродвигателей
Асинхронные двигатели получили широкое распространение благодаря ряду важных достоинств:

- Простота и надежность конструкции
- Низкая стоимость
- Высокий КПД (до 95% и выше)
- Возможность прямого пуска от сети
- Хорошие пусковые характеристики
- Возможность регулирования скорости
- Отсутствие щеточно-коллекторного узла
- Легкость обслуживания
Благодаря этим преимуществам асинхронные двигатели являются самым распространенным типом электродвигателей и широко применяются в промышленности и быту.
Области применения асинхронных электродвигателей
Асинхронные электродвигатели находят применение в самых разных отраслях:
- Промышленные приводы станков, насосов, вентиляторов, компрессоров
- Транспорт (электропоезда, трамваи, троллейбусы)
- Бытовая техника (холодильники, стиральные машины, пылесосы)
- Лифты и эскалаторы
- Строительная техника (бетономешалки, подъемники)
- Сельскохозяйственное оборудование
- Системы вентиляции и кондиционирования
Широкое применение асинхронных двигателей обусловлено их универсальностью, надежностью и хорошими эксплуатационными характеристиками.
Типы асинхронных электродвигателей
Различают следующие основные типы асинхронных электродвигателей:
- Трехфазные с короткозамкнутым ротором — наиболее распространенный тип
- Трехфазные с фазным ротором — для тяжелых условий пуска
- Однофазные — для бытовой техники
- Двухфазные — в системах автоматики
- Линейные — для создания поступательного движения
Выбор типа двигателя зависит от конкретных условий применения, требований к пусковым и рабочим характеристикам.
Регулирование скорости асинхронных двигателей
Существует несколько способов регулирования частоты вращения асинхронных двигателей:
- Изменение числа пар полюсов обмотки статора
- Изменение частоты питающего напряжения
- Изменение напряжения, подводимого к статору
- Введение добавочного сопротивления в цепь ротора (для двигателей с фазным ротором)
Наиболее эффективным и распространенным в настоящее время является частотное регулирование с помощью преобразователей частоты. Это позволяет плавно и в широких пределах регулировать скорость асинхронных двигателей.
Асинхронные генераторы
Асинхронные машины могут работать не только в двигательном, но и в генераторном режиме. Асинхронный генератор преобразует механическую энергию в электрическую при вращении ротора со скоростью выше синхронной. Основные особенности асинхронных генераторов:

- Простота конструкции
- Отсутствие щеточно-коллекторного узла
- Высокая надежность
- Стабильность частоты при изменении нагрузки
- Возможность параллельной работы
Асинхронные генераторы применяются в ветроэнергетике, малых ГЭС, дизель-генераторных установках. Их использование позволяет упростить и удешевить электрогенерирующие системы.
Заключение
Асинхронные электродвигатели благодаря своей простоте, надежности и хорошим эксплуатационным качествам остаются основным типом электропривода в промышленности и быту. Развитие силовой электроники и систем управления позволяет расширять области их применения, улучшать характеристики и повышать энергоэффективность. Асинхронные машины будут играть важную роль в электроприводе и в обозримом будущем.
Асинхронный двигатель | Строение и принцип работы асинхронного электродвигателя
Электрическими двигателями называют механизмы, предназначенные для преобразования электрической энергии в механическое движение. Электромоторы сопровождают человека практически во всех сферах его деятельности. Без них невозможно представить современную жизнь. Несмотря на надежность и долговечность, все же случаются поломки и сбои в работе таких устройств. Знание характеристик, особенностей поможет правильно выбирать, обслуживать и при необходимости ремонтировать асинхронные двигатели.
В асинхронных двигателях переменного тока (АД) частота вращения ротора не синхронизирована с частотой магнитного поля, индуцируемого током обмотки статора. От этого принципа произошло определение этой группы электромашин. В синхронных электрических машинах частоты совпадают.
В настоящее время разработано и применяется множество различных разновидностей АД, которые различаются конструктивно и по характеристикам. Бывают однофазные, двухфазные, трехфазные, многофазные конструкции, которые работают от сети переменного тока. Различается количество полюсов. Применяются модификации с постоянной и переменной частотой тока, последние называются инверторными. По типу ротора различают 2 вида: фазные электродвигатели и с короткозамкнутым ротором. Асинхронные электрические моторы выгодно отличаются от других преобразователей энергии компактностью, долговечностью высоким КПД.
Бывают однофазные, двухфазные, трехфазные, многофазные конструкции, которые работают от сети переменного тока. Различается количество полюсов. Применяются модификации с постоянной и переменной частотой тока, последние называются инверторными. По типу ротора различают 2 вида: фазные электродвигатели и с короткозамкнутым ротором. Асинхронные электрические моторы выгодно отличаются от других преобразователей энергии компактностью, долговечностью высоким КПД.
АД распространены очень широко, и являются самым популярным типом электромашин. Асинхронные электродвигатели используют в компрессорах, системах водоснабжения, отопления, кондиционирования, автомобилестроении. Особенно востребованы такие устройства в областях, где требуется точно выдерживать скорость вращения вала, например при производстве полимеров, стеклотканей, проволоки.
Относительно маломощные однофазные агрегаты работают в вентиляторах, маломощной бытовой технике. Более производительные двухфазные агрегаты популярнее, их применяют в приводах стиральных машин, холодильников, иных приборов.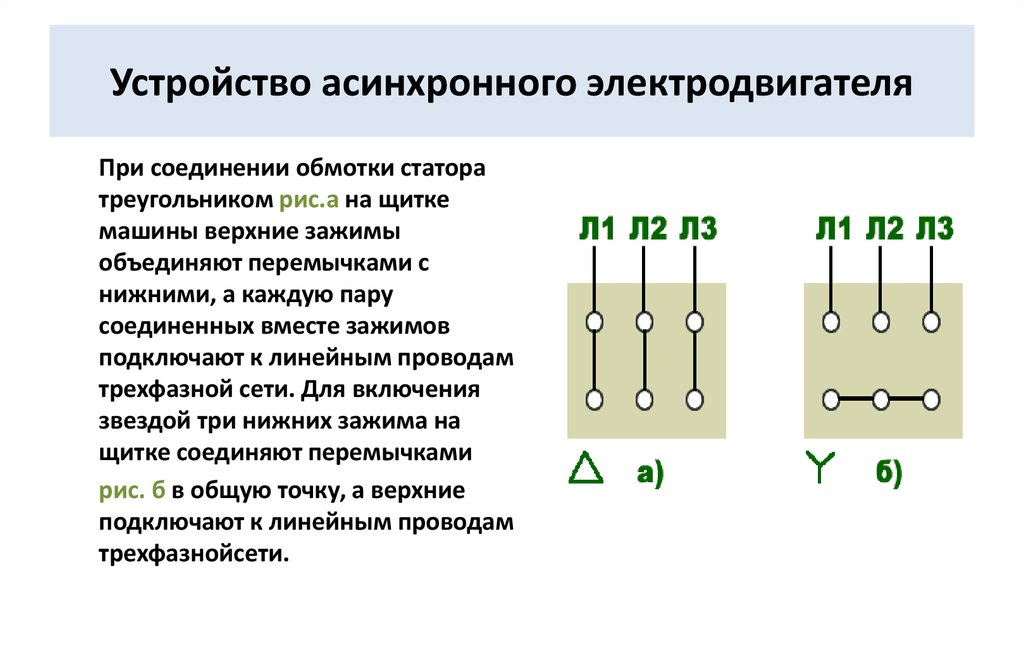
Значительно шире используются трехфазные асинхронные электромашины, в первую очередь в промышленности. Ими оснащают электроприводы станков, подъемных кранов, лифтов, многого другого. Этому способствуют надежность и экономичность электродвигателей.
Как устроен АД
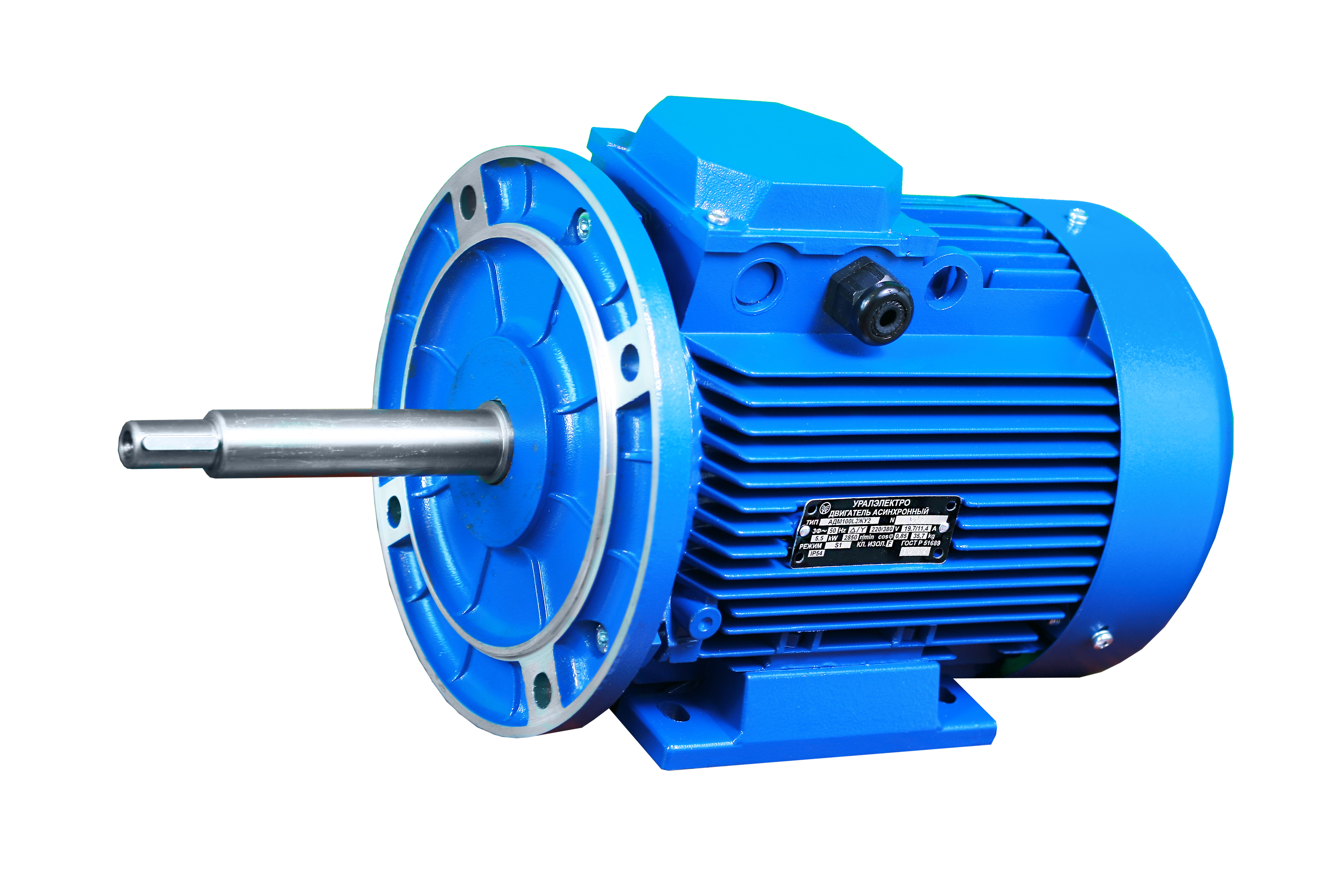
Асинхронный электродвигатель состоит из двух основных узлов: неподвижного статора и вращающегося вокруг своей оси ротора. Статор представляет собой стандартную конструкцию, где сердечник выполнен как полый цилиндр, изготовленный из стальных пластин, изолированных друг от друга. В расположенных на внутренней окружности открытых пазах уложена первичная обмотка, на которую подается напряжение электрической сети.
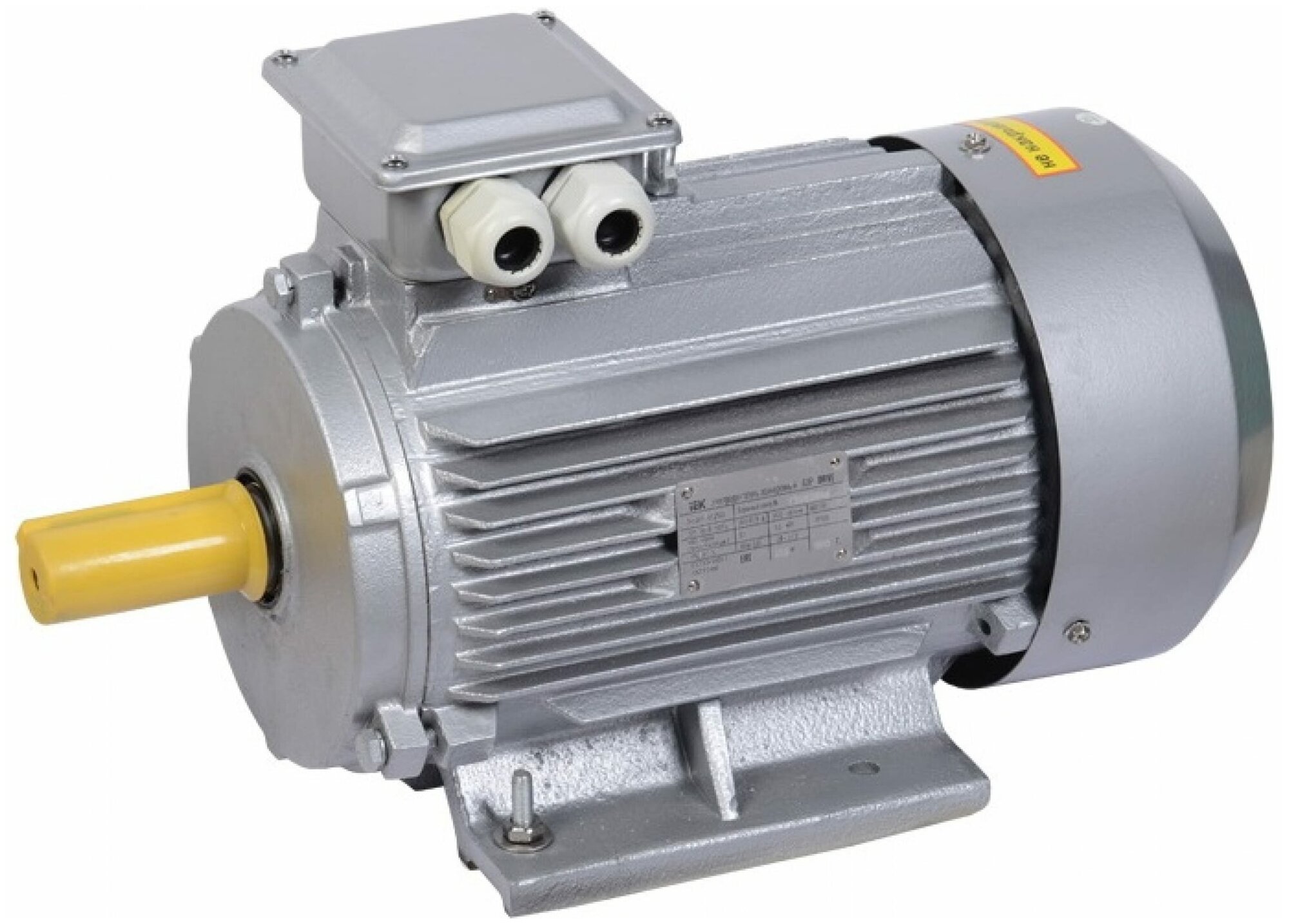
Внутри статора расположен ротор, опирающийся на вал через подшипники. Сами подшипники с обеих сторон закрыты фиксирующими их крышками. Весь агрегат помещается в металлический корпус. У асинхронных двигателей средней и высокой мощности для более эффективного охлаждения в корпусе предусмотрены ребра, а также вентилятор на валу. Предусмотрена клеммная коробка, куда выводятся концы обмоток.
Предусмотрена клеммная коробка, куда выводятся концы обмоток.
Ротор может быть двух типов: короткозамкнутым и фазным. Конструктивно они различаются, соответственно асинхронные двигатели принадлежат к одной из двух групп по типу ротора.
Асинхронный двигатель с короткозамкнутым ротором
Конструкция такого ротора предельно проста. Сердечник выполнен из штампованных листов, а роль вторичной обмотки играет набор параллельных друг другу металлических стержней, торцы которых замкнуты между собой стальными кольцами. Механизм напоминает беличье колесо.
Обмотки статора расположены под углом 120°. Если подать на них переменное напряжение со сдвигом 120°, внутри возникает вращающееся магнитное поле. Если поместить эту самую беличью клетку внутрь вращающегося поля, его силовые линии будут пересекать проводники ротора, и наводить в них электродвижущую силу, а соответственно появятся токи. В результате там создается собственное магнитное поле, которое будет взаимодействовать с вращающимся полем, входить с ним в «зацепление». Это означает, что ротор начинает вращаться в ту же сторону, что и магнитное поле статора.
Это означает, что ротор начинает вращаться в ту же сторону, что и магнитное поле статора.
Частота вращения ротора всегда меньше, чем частота поля статора. Если он «догонит» частоту статора, ЭДС наводиться не будет, вращающий момент станет равным нулю, и электродвигатель перестанет работать. В этом эффекте и кроется смысл асинхронности. Относительная величина отставания, выраженная в условных единицах, называется скольжением. Этот параметр зависит от характеристик ротора, в том числе его сопротивления.
Асинхронные двигатели с короткозамкнутым ротором не имеют подвижных контактов, их узлы проще, благодаря чему надежны и долговечны. Применяются в системах, не требующих регулировки скорости вращения, поскольку она затруднена, конструкция усложняется.
Асинхронный двигатель с фазным ротором
Фазный ротор по конструкции незначительно отличается от статора. Сердечник состоит из набора изолированных пластин, изготовленных из электростатической стали и закрепленных на вале. Между пластинами предусмотрены пазы, ориентированные вдоль продольной оси. В них укладываются витки вторичной обмотки, ее называют фазной. Число фаз обмоток статора и ротора должно быть одинаковым. Электрические цепи ротора подключается тремя контактными кольцами, на которых закреплены концы обмотки. Фазы соединяются звездочкой или треугольником. В двухполюсном асинхронном двигателе оси обмоток смещены друг относительно друга на 120°.
Между пластинами предусмотрены пазы, ориентированные вдоль продольной оси. В них укладываются витки вторичной обмотки, ее называют фазной. Число фаз обмоток статора и ротора должно быть одинаковым. Электрические цепи ротора подключается тремя контактными кольцами, на которых закреплены концы обмотки. Фазы соединяются звездочкой или треугольником. В двухполюсном асинхронном двигателе оси обмоток смещены друг относительно друга на 120°.
Предусмотрена возможность подключения дополнительного внешнего сопротивления для улучшения пусковых характеристик. Обычно используется реостат со ступенчатой регулировкой. Двигатель в такой конфигурации набирает обороты тоже ступенчато. При достижении оптимальных оборотов реостат отключается путем закорачивания токосъемных колец.
Особенности разных типов роторов
Электродвигатели с короткозамкнутыми роторами характеризуются следующими достоинствами:
- постоянная скорость, которая не зависит от изменения нагрузки;
- устойчивость к кратковременным механическим перегрузкам;
- простой пуск и подключение.
Отмечают более высокий КПД и легкую автоматизацию. В то же время данный тип электрических моторов имеет и недостатки, основной из которых — сложная регулировка скорости. Поэтому такая конструкция применяется в системах с постоянной скоростью вращения электродвигателя. Помимо этого, недостатками считают большой ток и недостаточное усилие при пуске.
Электромоторы с фазным ротором уступают короткозамкнутым по потерям мощности из-за более сложной конструкции. Их применяют при необходимости регулировки скорости, уменьшении пускового тока и увеличении крутящего момента в момент старта.
Способы подключения
Запуск электромотора должен происходить с минимальным скачком тока в обмотках. Для этого применяется 5 основных способов подключения:
- непосредственный — питание подается прямо на контакты электродвигателя через контактор или пускатель, когда падение напряжения не критично;
- снижение напряжения в течение времени старта;
- схема соединения обмоток статора переключается на треугольник со звезды;
- плавный запуск;
- изменение частоты напряжения сети.

Для однофазных версий используют расщепление полюсов, конденсаторный или резисторный пуск. Трехфазные электродвигатели запускаются или напрямую, переключением на треугольник, или посредством преобразователя напряжения, будь то реостат, трансформатор. Применяют изменение числа пар полюсов.
Как обеспечивается регулировка скорости
Регулировать частоту вращения асинхронного двигателя не так просто. Существуют 3 возможности. Можно изменить:
- частоту питающей сети;
- число пар полюсов;
- величину скольжения.
Чтобы изменить число пар полюсов нужно специальным образом заложить обмотку статора. Дальнейшие действия заключаются в возможности переключаться на одну, две или три пары полюсов. Такое переключение будет ступенчатым. Соответственно, дискретно будет меняться и частота вращения ротора асинхронного двигателя. В многополюсных обмотках статора частота выше.
Второй способ — изменить скольжение. Его величина зависит, в том числе, и от сопротивления. Для этого ротор оснащают обмотками и делают выводы через кольца. Появляется скользящий контакт, надежность уменьшается. Но помощью реостата или ступенчатого переключения можно вводить дополнительное сопротивление в ротор и плавно, либо дискретно, изменять величину скольжения. Посредством этого действия появляется возможность регулировать частоту вращения асинхронных двигателей.
Для этого ротор оснащают обмотками и делают выводы через кольца. Появляется скользящий контакт, надежность уменьшается. Но помощью реостата или ступенчатого переключения можно вводить дополнительное сопротивление в ротор и плавно, либо дискретно, изменять величину скольжения. Посредством этого действия появляется возможность регулировать частоту вращения асинхронных двигателей.
Однако эти способы не очень экономичны или неудобны. С развитием силовой электроники появился третий, самый действенный способ — изменять частоту питающей сети, для чего служат частотные преобразователи. При плавном изменении частоты питающего тока можно получить непрерывный ряд частот магнитного поля статора асинхронного двигателя в определенном диапазоне, а значит так же плавно изменять скорость вращения вала. Силовая электроника дала АД новый толчок в развитии, их доля превышает 80% всех электродвигателей в мире.
Как обеспечивается высокий пусковой момент
Одним из достоинств асинхронного двигателя с фазным ротором является высокий пусковой момент, тогда как короткозамкнутые роторы такого преимущества не обеспечивают. Об этом говорит его механическая характеристика. В момент пуска токи достигают 5 –7 значений номинальной величины, а произведение силы тока на магнитный поток и дает момент вращения.
Об этом говорит его механическая характеристика. В момент пуска токи достигают 5 –7 значений номинальной величины, а произведение силы тока на магнитный поток и дает момент вращения.
Если представить, что ротор конструктивно устроен в виде двух беличьих колес разного диаметра, вставленных друг в друга, то в момент пуска первоначальный момент будет приложен к внешнему колесу большего диаметра. Происходит это из-за явления вытеснения тока на высокой частоте, он называется скин-эффект. При двыхполюсной катушке, частоте сети 50 Гц, магнитное поле ротора развивает угловую скорость 3 тыс. об/мин. Скин-слой при этом составляет 9 мм. В многополюсных машинах этот слой больше. Поэтому, при пуске ток вытесняется наружу, и за счет более длинного рычага возрастает момент. Когда электрическая машина набирает номинальные обороты и переходит в двигательный режим, скин-эффект нивелируется. С ростом частоты вращения ротора падает частота индукции в обмотке. Тогда ток идет уже по внутренней части. По этому принципу и обеспечивается высокая тяга на пуске.
В реальной практике в асинхронных двигателях с повышенным пусковым моментом скин-эффект обеспечивается за счет формирования глубокого паза в фазном роторе. Ток распределяется в разные моменты времени по глубине паза в разных областях. При пуске ток концентрируются во внешней части, потом когда двигатель раскручивается, скин-эффект исчезает. Ток перераспределяется в глубину паза, рабочий вращающий момент становится меньше. Это означает, что в устоявшемся двигательном режиме АД значительно экономичнее, частые старты повышают затраты.
Асинхронный преобразователь энергии как генератор
Генераторы предназначены для преобразования механической энергии вращения в электроэнергию. Если вращать ротор асинхронного двигателя и достигнуть частоты вращения поля статора, ток перестанет наводиться, и вращающий момент не будет создаваться. Если приложить внешнюю силу и продолжить вращать этот ротор по направлению поля с еще более высокой частотой вращения, в роторе начнет вновь начнет наводиться ЭДС, но противоположного направления. Электрический ток будет идти в другую сторону, не как в двигательном режиме. Эти токи будут наводить противоЭДС в обмотке статора. В ней будет создаваться ток. Такая конструкция является асинхронным генератором.
Электрический ток будет идти в другую сторону, не как в двигательном режиме. Эти токи будут наводить противоЭДС в обмотке статора. В ней будет создаваться ток. Такая конструкция является асинхронным генератором.
Если асинхронный двигатель включить в сеть, а потом начать вращать его ротор быстрее, чем частота поля статора в том же направлении, то возникнет генерация в сеть. При этом асинхронный двигатель будет потреблять из сети реактивную энергию для создания магнитного поля, а выдавать активную энергию. Пример — знаменитые электромобили «Tesla» первого поколения. Их оснащали современным инновационным асинхронным преобразователем энергии. Он работал как в режиме двигателя на разгоне, так и в режиме генератора при рекуперативном торможении, когда электроэнергия через инвертор поступает на зарядку батареи.
Асинхронные генераторы принадлежат к группе приборов, вырабатывающих переменный ток разной частоты. В схему включают инвертор, где ток преобразуется в постоянный. Затем снова в переменный, но уже с точно заданной частотой сети — 50 герц.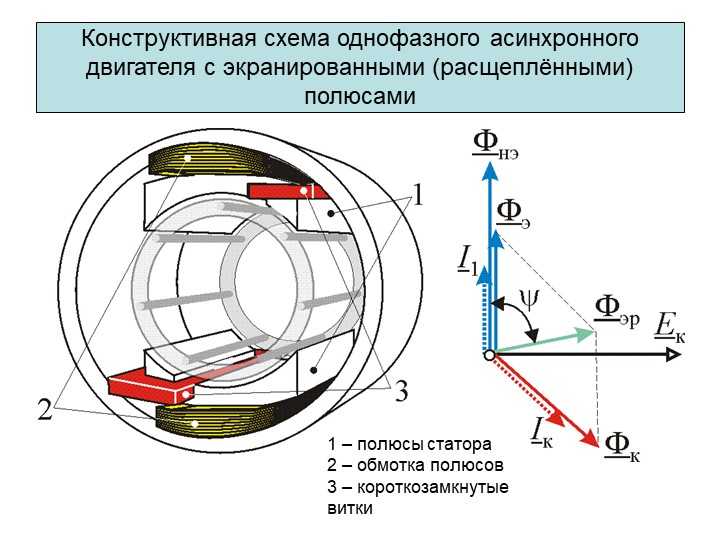
Преимущества и недостатки асинхронных двигателей
АД, благодаря своим качествам, снискали высокую популярность. К несомненным преимуществам таких устройств относят:
- простую и отработанную конструкцию;
- низкие затраты в эксплуатации: себестоимость единицы мощности в асинхронных двигателях самая низкая;
- надежность, простоту обслуживания, чему способствует отсутствие щеток
- невысокую стоимость.
Благодаря сдвигу фаз не требуются дополнительные устройства и преобразователи для формирования крутящего момента. Не последнюю роль играют малые потери. КПД при работе с максимальной нагрузкой может достигать 97 % благодаря минимальному количеству узлов.
Как и всем устройствам, асинхронным преобразователям присущи недостатки. Среди них:
- затрудненное регулирование скорости вращения вала, узкий диапазон изменения.
- высокие токи при пуске, что может привести к скачкам напряжения в сети.
- инерционность ротора в момент старта: асинхронный двигатель может не запуститься, если приводит массивный агрегат.

- зависимость от параметров сети.
Современные механические и электротехнические конструктивные решения почти полностью нивелируют эти недостатки.
И все же, несмотря на все достоинства, ресурс асинхронных электрических моторов не вечен. Бывают проскальзывания ротора относительно вала, замыкания обмоток, обрывы, повреждения корпуса, износ подшипников, другие неисправности. Все это проявляет себя падением мощности, посторонними звуками и запахами, а то и полным отказом. Приобретать новый агрегат бывает накладно, да и не всегда имеет смысл. В подавляющем большинстве случаев рациональнее устранить неисправность и продолжить эксплуатацию электрического двигателя.
Ремонтом электромоторов любого типа и мощности в Санкт- Петербурге занимается компания «Хельд Вэй». Оперативно и качественно выполняются все работы по восстановлению работоспособности электромоторов независимо от сложности. Каждая отремонтированная электрическая машина проходит испытания, чтобы убедиться в соответствии параметров требованиям к новому агрегату.
На работу предоставляются скидки, гарантии. Текущий ремонт возможен по месту эксплуатации, с выездом мастеров. Капитальный и ремонт средней степени производятся на территории предприятия. Имеются запчасти и комплектующие.
Звоните, обращайтесь.
≫ Асинхронный двигатель: зачем нужен, принцип работы, конструкция
Асинхронный двигатель – это простое и надежное устройство, способное электрическую энергию преобразовать в механическую. Его изобрел инженер Доливо-Добровольский в конце 19 века. Интерес разработчиков различного оборудования и аппаратуры к этому устройству постоянно возрастает, поэтому в статье мы рассмотрим не только, что такое асинхронный двигатель, но и как он работает, из чего состоит и какими достоинствами обладает.
Асинхронный двигатель: конструкция
Конструкция устройства достаточно проста. Основные части асинхронного двигателя следующие:
- Статор, имеющий форму цилиндра. Он собирается из листов стали. В его сердечнике есть пазы, смещенные друг к дружке на 120°.
 В них укладывается обмотка.
В них укладывается обмотка. - Ротор. Бывает короткозамкнутым или фазным. В первом случае ротором служит сердечник, в котором стержни из алюминия закорочены торцевыми уплотнителями. Фазный ротор состоит из 3-х фазной обмотки. Устройство с фазным ротором всегда трехфазное, а с короткозамкнутым ротором выделяют 3 вида асинхронных двигателей – одно-, двух- и трехфазные.
- Конструктивные элементы. Это детали, которые в конструкции асинхронного двигателя отвечают за выполнение вращательных, охлаждающих и защитных функций.
Схематическое изображение конструкции асинхронного двигателя можно найти в сети Интернет.
Что значит асинхронный двигатель и его принцип действия
Асинхронный – это тот, у которого в работе отсутствует синхронность, у которого при старте статическая и подвижная части при вращении имеют разную частоту магнитного потока. Этот показатель у подвижного элемента меньше, чем у неподвижного.
Рассмотрим принцип работы асинхронного двигателя на примере: достаточно взять постоянный магнит и начать его вращать вокруг своей оси на небольшом расстоянии от диска из меди. Очень скоро диск начинает вращение, следуя за магнитом. Такое поведение диска объясняется тем, что из-за вращающегося вблизи магнита в нем появляются токи Фуко, которые двигаются по замкнутому контуру. Это токи короткого замыкания, нагревающие металлическую конструкцию. В диске возникает собственный магнитный поток, который начинает взаимодействовать с полем магнита.
Очень скоро диск начинает вращение, следуя за магнитом. Такое поведение диска объясняется тем, что из-за вращающегося вблизи магнита в нем появляются токи Фуко, которые двигаются по замкнутому контуру. Это токи короткого замыкания, нагревающие металлическую конструкцию. В диске возникает собственный магнитный поток, который начинает взаимодействовать с полем магнита.
В асинхронном электромоторе источником вращающего поля выступают обмотки статора. Под действием образованного обмотками магнитного потока в проводниках вращающегося элемента формируется электродвижущая сила. Когда магнитный поток статора начинает взаимодействовать с индуцируемым током в обмотке вращающейся части, появляется электромагнитная сила. Она и начинает вращать вал электродвигателя.
Чтобы понять, как работает асинхронный двигатель, представим происходящие в нем действия пошагово:
- Двигатель запускается, и магнитный поток неподвижной части пересекает контур вращающегося элемента, формируя электродвижущую силу.

- В короткозамкнутом роторе образуется переменный ток.
- Под действием магнитных потоков неподвижной и вращающейся части образуется крутящий момент.
- Вращающийся элемент стремится к полю неподвижной части.
- В определенный момент у неподвижной и вращающейся части двигателя совпадает частота вращения магнитного потока, тогда крутящий момент равен 0, что приводит к затуханию электромагнитных проявлений во вращающемся элементе двигателя.
- Контур ротора начинает отставать, магнитный поток статора начинает его возбуждать.
Медлительность ротора в сравнении с магнитным полем статора и обеспечивает несинхронную работу электродвигателя.
Формирование тока в роторе происходит бесконтактно, поэтому не нужно устанавливать в устройстве скользящие контакты. Эта особенность электродвигателя делает его более эффективным и надежным. Изменить направление вращения мотора можно, поменяв фазы на клеммах одной из обмоток.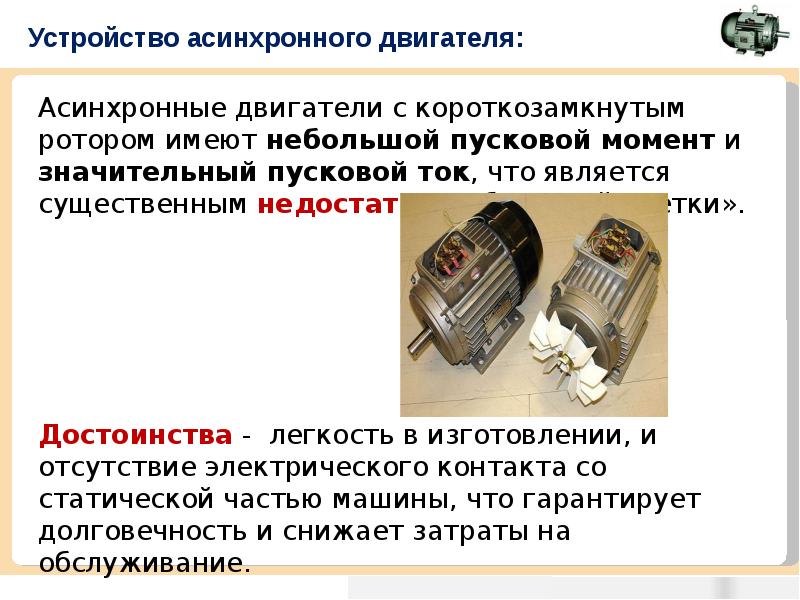 Направление электромагнитной силы можно определить по «правилу буравчика».
Направление электромагнитной силы можно определить по «правилу буравчика».
Достоинства устройства
Главными достоинствами асинхронных двигателей является простота их конструкции и легкость использования.Также устройство характеризует:
- Надежность и долговечность. Из-за бесконтактного взаимодействия между основными деталями устройства оно редко ломается и не изнашивается;
- Доступная цена. Простая конструкция и недорогое сырье для производства электродвигателей обеспечивает низкую стоимость оборудования;
- Простой принцип использования. Для работы с асинхронным двигателем не нужно обладать специальными навыками.
- Универсальность. Электродвигатель асинхронного типа устанавливается практически в любое оборудование.
Эти преимущества объясняют широкое применение асинхронных двигателей во всех отраслях промышленности и сферах человеческой жизни.
В чем разница между асинхронными и синхронными двигателями?
Загрузите эту статью в формате . PDF
PDF
Растущее значение энергоэффективности побудило производителей электродвигателей продвигать различные схемы, улучшающие характеристики двигателя. К сожалению, терминология, связанная с моторными технологиями, может сбивать с толку, отчасти потому, что несколько терминов иногда могут использоваться взаимозаменяемо для обозначения одной и той же базовой конфигурации мотора. Среди классических примеров этого явления — асинхронные и асинхронные двигатели.
Все асинхронные двигатели являются асинхронными. Асинхронный характер работы асинхронного двигателя возникает из-за скольжения между скоростью вращения поля статора и несколько более низкой скоростью вращения ротора. Более конкретное объяснение того, как возникает это скольжение, касается деталей внутреннего устройства двигателя.
Большинство современных асинхронных двигателей содержат вращающийся элемент (ротор), называемый беличьей клеткой. Цилиндрическая беличья клетка состоит из тяжелых медных, алюминиевых или латунных стержней, вставленных в канавки и соединенных с обоих концов проводящими кольцами, которые электрически закорачивают стержни друг с другом. Сплошной сердечник ротора состоит из пакетов пластин из электротехнической стали. В роторе меньше пазов, чем в статоре. Количество пазов ротора также должно быть нецелым кратным пазам статора, чтобы предотвратить магнитную блокировку зубьев ротора и статора при запуске двигателя.
Сплошной сердечник ротора состоит из пакетов пластин из электротехнической стали. В роторе меньше пазов, чем в статоре. Количество пазов ротора также должно быть нецелым кратным пазам статора, чтобы предотвратить магнитную блокировку зубьев ротора и статора при запуске двигателя.
Также можно найти асинхронные двигатели, роторы которых состоят из обмоток, а не из беличьей клетки. Суть этой конфигурации с фазным ротором состоит в том, чтобы обеспечить средства снижения тока ротора, когда двигатель впервые начинает вращаться. Обычно это достигается путем последовательного соединения каждой обмотки ротора с резистором. Обмотки получают ток через какое-то контактное кольцо. Как только ротор достигает конечной скорости, полюса ротора переключаются на короткое замыкание, таким образом, электрически он становится таким же, как ротор с короткозамкнутым ротором.
Неподвижная часть обмоток двигателя называется якорем или статором. Обмотки статора подключаются к сети переменного тока. Приложение напряжения к статору вызывает протекание тока в обмотках статора. Протекание тока индуцирует магнитное поле, которое воздействует на ротор, создавая напряжение и ток в элементах ротора.
Приложение напряжения к статору вызывает протекание тока в обмотках статора. Протекание тока индуцирует магнитное поле, которое воздействует на ротор, создавая напряжение и ток в элементах ротора.
Северный полюс статора индуцирует южный полюс ротора. Но полюс статора вращается при изменении амплитуды и полярности переменного напряжения. Индуцированный полюс пытается следовать за вращающимся полюсом статора. Однако закон Фарадея гласит, что электродвижущая сила возникает, когда петля провода перемещается из области с низкой напряженностью магнитного поля в область с высокой напряженностью магнитного поля и наоборот. Если бы ротор точно следовал за движущимся полюсом статора, напряженность магнитного поля не изменилась бы. Таким образом, ротор всегда отстает от вращения поля статора. Поле ротора всегда отстает от поля статора на некоторую величину, поэтому оно вращается со скоростью, несколько меньшей, чем скорость статора. Разница между ними называется скольжением.
Величина скольжения может варьироваться. Это зависит в основном от нагрузки, которую приводит двигатель, но также зависит от сопротивления цепи ротора и силы поля, которое индуцирует поток статора.
Это зависит в основном от нагрузки, которую приводит двигатель, но также зависит от сопротивления цепи ротора и силы поля, которое индуцирует поток статора.
Несколько простых уравнений проясняют основные взаимосвязи.
Когда переменный ток изначально подается на статор, ротор неподвижен. Напряжение, индуцируемое в роторе, имеет ту же частоту, что и в статоре. Когда ротор начинает вращаться, частота наведенного в нем напряжения f r , капли. Если f — частота напряжения статора, то скольжение, с, связывает два через f r = с f . Здесь s выражается в виде десятичной дроби.
Когда ротор стоит на месте, ротор и статор эффективно образуют трансформатор. Таким образом, напряжение E , индуцируемое в роторе, определяется уравнением трансформатора0022 м
где N = количество проводников под одним полюсом статора (обычно небольшое для двигателя с короткозамкнутым ротором) и Ñ„ м = максимальный магнитный поток, Webers . Таким образом, напряжение E r , индуцированное при вращении ротора, зависит от скольжения: 0021 м = с E
Таким образом, напряжение E r , индуцированное при вращении ротора, зависит от скольжения: 0021 м = с E
Описание синхронных двигателей
Синхронный двигатель имеет специальную конструкцию ротора, которая позволяет ему вращаться с той же скоростью, то есть синхронно, с полем статора. Одним из примеров синхронного двигателя является шаговый двигатель, широко используемый в приложениях, связанных с управлением положением. Однако недавние достижения в области схем управления мощностью привели к появлению конструкций синхронных двигателей, оптимизированных для использования в таких ситуациях с более высокой мощностью, как вентиляторы, воздуходувки и ведущие мосты во внедорожных транспортных средствах.
В основном существует два типа синхронных двигателей:
• С самовозбуждением — Принципы аналогичны асинхронным двигателям, и
• С прямым возбуждением — обычно с постоянными магнитами, но не всегда
Синхронный двигатель с самовозбуждением , также называемый вентильным реактивным двигателем, содержит стальной литой ротор с прорезями или зубьями, получившими название явно выраженных полюсов. Именно выемки позволяют ротору зафиксироваться и работать с той же скоростью, что и вращающееся магнитное поле.
Именно выемки позволяют ротору зафиксироваться и работать с той же скоростью, что и вращающееся магнитное поле.
Чтобы переместить ротор из одного положения в другое, схема должна последовательно переключать питание на последовательные обмотки/фазы статора аналогично шаговому двигателю. Синхронный двигатель с прямым возбуждением может называться по-разному. Обычные названия включают ECPM (постоянный магнит с электронной коммутацией), BLDC (бесщеточный двигатель постоянного тока) или просто бесщеточный двигатель с постоянными магнитами. В этой конструкции используется ротор с постоянными магнитами. Магниты могут устанавливаться на поверхности ротора или вставляться в узел ротора (в этом случае двигатель называется двигателем с внутренними постоянными магнитами).
Постоянные магниты являются выступающими полюсами этой конструкции и предотвращают скольжение. Микропроцессор управляет последовательным переключением питания на обмотках статора в нужное время с помощью полупроводниковых переключателей, сводя к минимуму пульсации крутящего момента.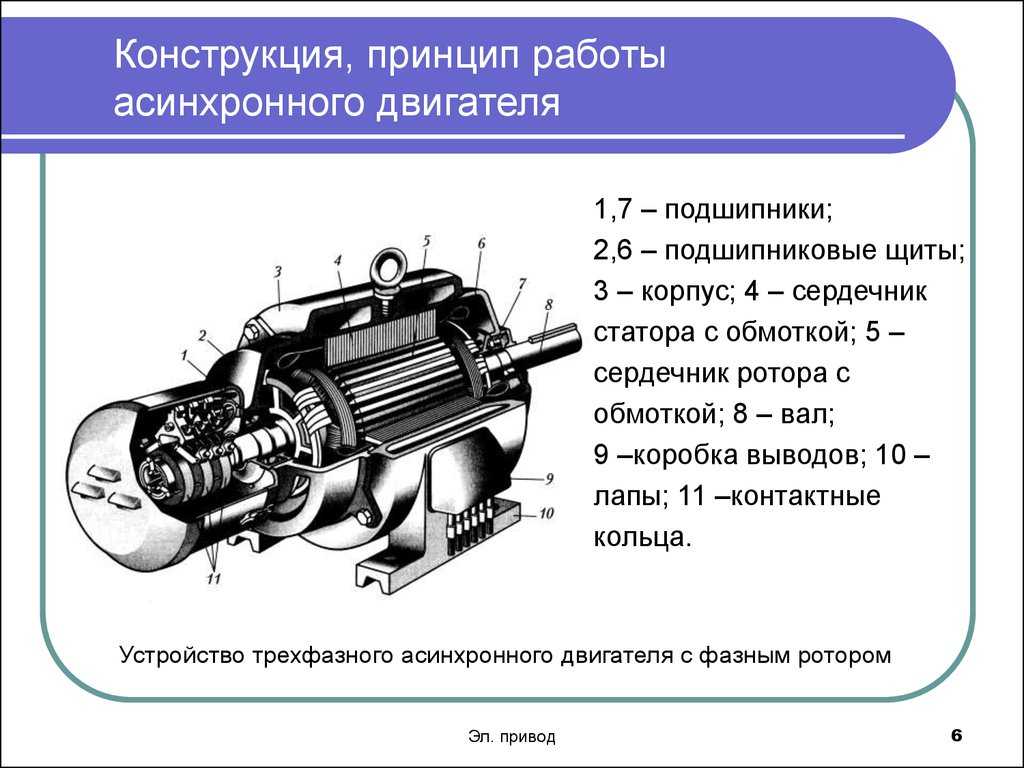 Принцип работы всех этих типов синхронных двигателей в основном одинаков. Энергия подается на катушки, намотанные на зубья статора, которые создают значительный магнитный поток, пересекающий воздушный зазор между ротором и статором. Поток течет перпендикулярно воздушному зазору. Если выступающий полюс ротора идеально совмещен с зубцом статора, крутящий момент не возникает. Если зубец ротора находится под некоторым углом к зубу статора, по крайней мере часть потока пересекает зазор под углом, не перпендикулярным поверхностям зубьев. Результатом является крутящий момент на роторе. Таким образом, переключение питания на обмотки статора в нужное время вызывает картину потока, которая приводит к движению по часовой стрелке или против часовой стрелки.
Принцип работы всех этих типов синхронных двигателей в основном одинаков. Энергия подается на катушки, намотанные на зубья статора, которые создают значительный магнитный поток, пересекающий воздушный зазор между ротором и статором. Поток течет перпендикулярно воздушному зазору. Если выступающий полюс ротора идеально совмещен с зубцом статора, крутящий момент не возникает. Если зубец ротора находится под некоторым углом к зубу статора, по крайней мере часть потока пересекает зазор под углом, не перпендикулярным поверхностям зубьев. Результатом является крутящий момент на роторе. Таким образом, переключение питания на обмотки статора в нужное время вызывает картину потока, которая приводит к движению по часовой стрелке или против часовой стрелки.
Еще один тип синхронного двигателя называется вентильным реактивным двигателем (SR).
Его ротор состоит из стальных пластин с набором зубьев. Зубцы магнитопроницаемы, а окружающие их участки слабопроницаемы в силу прорезанных в них пазов. Таким образом, ротору не нужны обмотки, редкоземельные материалы или магниты.
Таким образом, ротору не нужны обмотки, редкоземельные материалы или магниты.
В отличие от асинхронных двигателей, в роторе отсутствуют стержни ротора и, следовательно, в роторе не протекает ток, создающий крутящий момент. Отсутствие проводника какой-либо формы на роторе SR означает, что общие потери в роторе значительно ниже, чем в других двигателях с роторами, несущими проводники. Крутящий момент, создаваемый двигателем SR, регулируется путем регулировки величины тока в электромагнитах статора. Затем скорость регулируется путем модуляции крутящего момента (посредством тока обмотки). Этот метод аналогичен тому, как скорость регулируется током якоря в традиционном щеточном двигателе постоянного тока.
Двигатель SR создает крутящий момент, пропорциональный величине тока, подаваемого на его обмотки. Производство крутящего момента не зависит от скорости двигателя. Это отличается от асинхронных двигателей переменного тока, где при высоких скоростях вращения в области ослабления поля ток ротора все больше отстает от вращающегося поля по мере увеличения оборотов двигателя.
Асинхронный двигатель
Асинхронный двигатель имеет пассивный ротор, который замкнут накоротко постоянно (беличья клетка) или временно (см.
Магнитное поле в асинхронном двигателе создается током намагничивания за счет подаваемой электрической энергии. Асинхронные двигатели характеризуются скольжением, т.е. е. зависящая от нагрузки разница между скоростью вращения ротора и скоростью вращающегося поля питающего напряжения.
Ротор представляет собой металлическую клетку с осевыми стержнями, расположенными по круговой симметричной схеме и прикрепленными к короткозамыкающему кольцу (концевому кольцу) на каждом конце.
Статор содержит распределенные катушки, которые индуцируют напряжение в стержнях ротора (см. Индукция ) посредством вращающегося магнитного поля. Это приводит к сильному току в короткозамкнутых стержнях, что создает силу между ротором и статором в магнитном поле и приводит к электромагнитному взаимодействию, ответственному за асинхронность. Асинхронные двигатели подвержены значительным потерям в статоре и роторе.
Это приводит к сильному току в короткозамкнутых стержнях, что создает силу между ротором и статором в магнитном поле и приводит к электромагнитному взаимодействию, ответственному за асинхронность. Асинхронные двигатели подвержены значительным потерям в статоре и роторе.
В двигателях с контактными кольцами трехфазная обмотка ротора соединяется с переменными резисторами, обычно используемыми в качестве жидкостных пускателей, через контактные кольца. Такая конструкция обеспечивает мягкость процесс запуска , который не оказывает ударной нагрузки на сеть электропитания и позволяет в определенной степени изменять скорость. Однако это также приводит к значительным потерям мощности.
Обмотки ротора с короткозамкнутым ротором обычно состоят из одинарных или двойных токопроводящих стержней, которые на концах замыкаются накоротко кольцеобразным проводником. Короткозамкнутые роторы очень просты по конструкции и надежны, не требуют обслуживания. См. рис. 1 Асинхронный двигатель
Различают двигатели с сухим ротором, погружные двигатели и двигатели с мокрым ротором в отношении контакта с водой.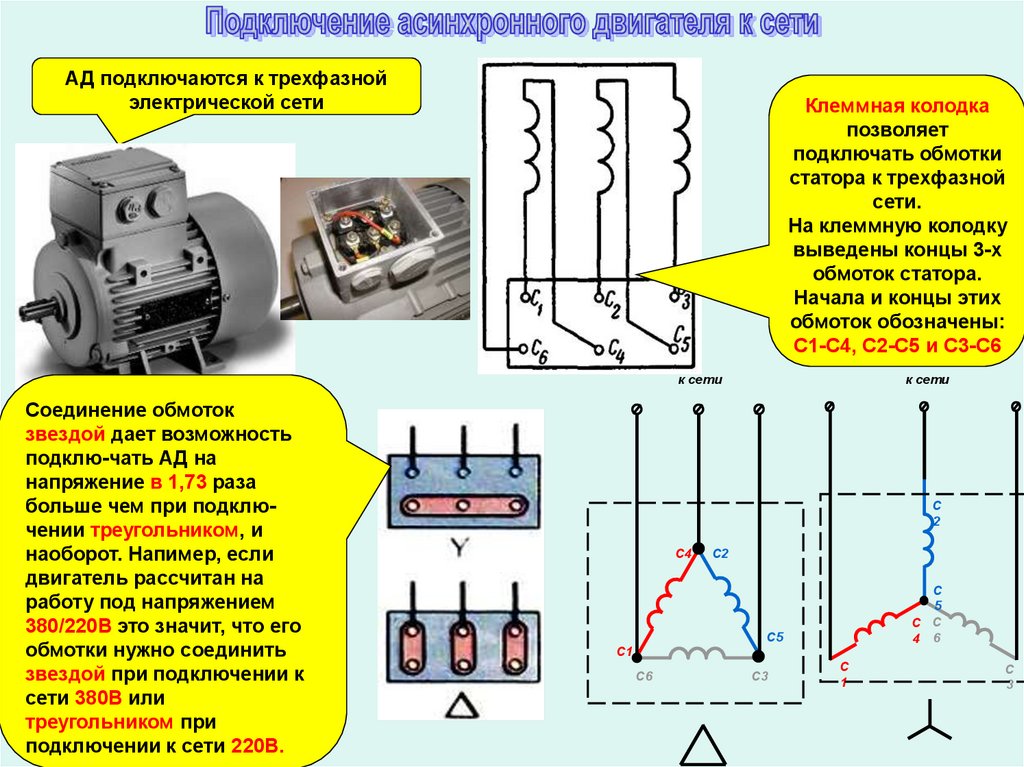 См. рис. 2 Асинхронный двигатель
См. рис. 2 Асинхронный двигатель
| Внутреннее смачивание | Внешнее смачивание 900 54 | ||
| Ротор | Обмотка | Сухой корпус 9000 3 | Мокрый корпус (погружной |
| Сухой | Сухой | Сухой мотор (с защитой | Сухой (заполненный воздухом) погружной двигатель |
| Мокрый (двигатель с мокрым ротором) | Сухой (герметизированный двигатель) | Двигатель с мокрым ротором мокрого насоса | Полностью погружной двигатель |
Рис. 2 Асинхронный двигатель: Обозначение асинхронных двигателей в зависимости от смачивания
Сухой двигатель имеет различные виды защиты от попадания воды (см.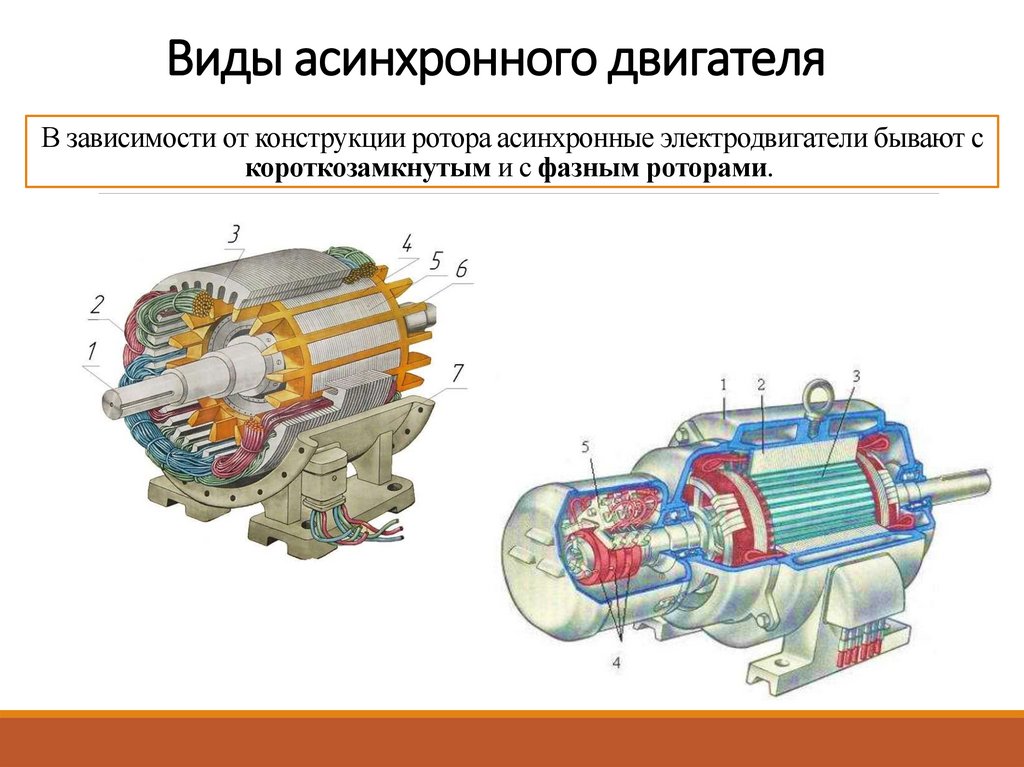 Тип защиты ).
Тип защиты ).
Погружной электродвигатель частично или полностью погружается в воду и обычно устанавливается в вертикальном положении. Тепло, выделяемое двигателем, передается непосредственно окружающей перекачиваемой жидкости. Его отличительной чертой является корпус двигателя, который смачивается снаружи (см.0045 Насос с погружным двигателем ). Внутреннее смачивание и глубина погружения отличают заполненные маслом или воздухом погружные двигатели для малой и средней глубины погружения (насосы для сточных вод) от полностью погружных двигателей.
См. рис. 3, 4 Насос для сточных вод
Полностью погружные электродвигатели смачиваются перекачиваемой жидкостью как внутри, так и снаружи. Они рассчитаны на любую глубину погружения и в первую очередь используются в скважинах (см. Погружные скважинные насосы ), поэтому они имеют небольшой диаметр и относительно длинные. Полностью погружные электродвигатели могут быть оснащены мокрой обмоткой статора (включая водонепроницаемую пластиковую изоляцию) или, в сочетании с корпусом, сухой обмоткой (см.
