Что такое электродвигатель и как он работает. Какие бывают типы электродвигателей. Из каких основных частей состоит электродвигатель. Каковы основные характеристики и параметры электродвигателей. Где применяются различные виды электродвигателей.
Что такое электродвигатель и его основные типы
Электродвигатель — это электрическая машина, преобразующая электрическую энергию в механическую энергию вращения вала. Основной принцип работы электродвигателя заключается в использовании явления электромагнитной индукции.
Существует несколько основных типов электродвигателей:
- Двигатели постоянного тока
- Асинхронные двигатели переменного тока
- Синхронные двигатели переменного тока
- Шаговые двигатели
- Вентильные двигатели
Каждый тип имеет свои особенности конструкции, принципа действия и области применения. Рассмотрим подробнее наиболее распространенные виды электродвигателей.
Устройство и принцип работы двигателя постоянного тока
Двигатель постоянного тока состоит из следующих основных частей:

- Статор с постоянными магнитами или электромагнитами
- Ротор (якорь) с обмоткой
- Коллектор
- Щетки
Принцип работы двигателя постоянного тока основан на взаимодействии магнитного поля статора и магнитного поля, создаваемого током в обмотке ротора. При подаче постоянного напряжения на обмотку ротора через щетки и коллектор, в ней возникает ток. Взаимодействие магнитных полей создает крутящий момент, заставляющий ротор вращаться.
Коллектор обеспечивает переключение направления тока в обмотках ротора при его вращении, что позволяет поддерживать непрерывное вращение в одном направлении.
Асинхронный двигатель: конструкция и принцип действия
Асинхронный двигатель является наиболее распространенным типом электродвигателя переменного тока. Его основные части:
- Статор с трехфазной обмоткой
- Ротор (короткозамкнутый или фазный)
- Подшипниковые щиты
- Вентилятор охлаждения
Принцип работы асинхронного двигателя основан на взаимодействии вращающегося магнитного поля статора и токов, индуцируемых этим полем в обмотке ротора. При подключении обмоток статора к трехфазной сети переменного тока создается вращающееся магнитное поле. Оно наводит ЭДС в обмотке ротора, вызывая в ней токи. Взаимодействие этих токов с магнитным полем статора создает вращающий момент.

Скорость вращения ротора всегда немного меньше скорости вращения магнитного поля статора, отсюда название «асинхронный».
Синхронный двигатель и его особенности
Синхронный двигатель отличается от асинхронного тем, что его ротор вращается с той же скоростью, что и магнитное поле статора — синхронно. Основные части синхронного двигателя:
- Статор с трехфазной обмоткой
- Ротор с обмоткой возбуждения или постоянными магнитами
- Контактные кольца (для подвода постоянного тока к обмотке ротора)
- Система возбуждения
Принцип работы синхронного двигателя основан на взаимодействии вращающегося магнитного поля статора и постоянного магнитного поля ротора. Обмотка статора создает вращающееся магнитное поле при подключении к трехфазной сети. Ротор с постоянными магнитами или электромагнитами создает свое магнитное поле. Взаимодействие этих полей вызывает вращение ротора с синхронной скоростью.
Основные характеристики и параметры электродвигателей
Важнейшими параметрами электродвигателей являются:
- Номинальная мощность — мощность на валу при номинальных условиях работы
- Номинальное напряжение питания
- Номинальная частота вращения
- КПД — коэффициент полезного действия
- Коэффициент мощности (для двигателей переменного тока)
- Пусковой ток и пусковой момент
- Перегрузочная способность
Характеристики электродвигателя обычно представляют в виде графиков зависимости момента, тока, КПД от частоты вращения. Важной является механическая характеристика — зависимость момента от скорости вращения.
Применение различных типов электродвигателей
Области применения основных типов электродвигателей:
- Двигатели постоянного тока: электротранспорт, станки с ЧПУ, роботы
- Асинхронные двигатели: насосы, вентиляторы, конвейеры, станки
- Синхронные двигатели: мощные компрессоры, генераторы, прокатные станы
- Шаговые двигатели: принтеры, плоттеры, системы позиционирования
- Вентильные двигатели: сервоприводы, бытовая техника
Выбор типа двигателя зависит от требований к регулированию скорости, момента, точности позиционирования и других факторов конкретного применения.
Преимущества и недостатки основных типов электродвигателей
Каждый тип электродвигателя имеет свои достоинства и ограничения:
Двигатели постоянного тока:
Преимущества:
- Простота регулирования скорости
- Высокий пусковой момент
- Компактность
Недостатки:
- Наличие коллекторно-щеточного узла
- Необходимость в источнике постоянного тока
Асинхронные двигатели:
Преимущества:
- Простота конструкции
- Низкая стоимость
- Высокая надежность
Недостатки:

- Сложность регулирования скорости
- Относительно низкий КПД при малых нагрузках
Синхронные двигатели:
Преимущества:
- Высокий КПД
- Стабильная скорость вращения
- Возможность работы с высоким коэффициентом мощности
Недостатки:
- Сложность конструкции
- Необходимость в системе возбуждения
- Трудности при пуске
Регулирование скорости вращения электродвигателей
Методы регулирования скорости зависят от типа двигателя:
Для двигателей постоянного тока:
- Изменение напряжения якоря
- Изменение магнитного потока возбуждения
- Введение добавочного сопротивления в цепь якоря
Для асинхронных двигателей:
- Изменение частоты питающего напряжения (частотное регулирование)
- Изменение числа пар полюсов
- Введение сопротивления в цепь ротора (для двигателей с фазным ротором)
Для синхронных двигателей:
- Изменение частоты питающего напряжения
- Изменение тока возбуждения
Наиболее эффективным и распространенным в настоящее время является частотное регулирование с помощью преобразователей частоты.
определение, конструкция, как работает, типы
В нашей повседневной жизни мы сталкиваемся со многими электрическими устройствами, такими как насосы, вентиляторы, воздуходувки и т.д. Все это оборудование нуждается в первичном двигателе, который представляет собой электродвигатель. В этой статье мы собираемся обсудить, как работает электродвигатель (однофазный и трехфазный асинхронный двигатель). Электродвигатель может быть переменного или постоянного тока, но электродвигатели переменного тока имеют большее применение по сравнению с двигателями постоянного тока.
Что такое электродвигатель
Электродвигатель — это машина, которая преобразует электрическую энергию, подаваемую на него, в механическую работу вращения вала двигателя. Это достигается взаимодействием создаваемого магнитного поля и проводника или обмоток с током. Поставляемая электроэнергия может быть однофазной или трехфазной.
Конструкция и работа электродвигателя
Следующие данные описывают различные части электродвигателя и объясняют, как работает электродвигатель.
Прежде чем приступить к работе с асинхронным двигателем, очень важно знать конструктивные особенности электродвигателя. В целом электродвигатель имеет два важных компонента:
- Статор
- Ротор
Статор асинхронного двигателя имеет прочный многослойный стальной магнитный сердечник. Эти ламинированные сердечники имеют прорези на внутренней поверхности. Фазовые обмотки размещены в пазах магнитного сердечника и изолируются отдельно, помещая изоляционные листы или погружая их в бак с лаком и нагревая его. Концы фазных обмоток выводятся в клеммную коробку. Клеммная коробка имеет входящий провод от трехфазного источника питания.
Ротор асинхронного двигателя состоит из многослойного сердечника, который установлен на валу. Этот многослойный сердечник имеет прорези на периферии, где размещены токопроводящие стержни. Следует отметить, что пазы предназначены только для проводников, а не для обмоток. Этот проводник обычно изготавливается из меди или алюминия. Эти стержни замыкаются на своих концах кольцом короткого замыкания.
Когда на обмотку статора асинхронного двигателя подается переменное напряжение (однофазное или трехфазное), ток протекает через обмотку статора и создает магнитный поток.
В случае трехфазного асинхронного двигателя создаваемый магнитный поток представляет собой вращающийся магнитный поток. Этот вращающийся поток будет вращаться с синхронной скоростью, которая будет зависеть от количества полюсов и частоты питания, подаваемого на двигатель.
Синхронная скорость Ns = (120 f) / p
где
- f — частота подачи.
- р — количество полюсов.
Этот вращающийся магнитный поток статора прорезает проводник ротора и вызывает переменную ЭДС. Индуцированная ЭДС создаст ток, протекающий через проводник ротора, и создаст магнитный поток. В результате создаются два потока (один — поток вращающегося статора, а другой — поток ротора). Взаимодействие между этими двумя магнитными потоками создает вращающий момент на роторе, и ротор вращается в направлении вращающегося магнитного потока. Следует отметить, что скорость потока резания прямо пропорциональна скорости вращения ротора.
Крутящий момент на роторе = Φ × I R × cosφ
где
- Φ — поток статора.
- I R — ток ротора.
- φ — разность фаз между потоком статора и током ротора.
В случае однофазного асинхронного двигателя поток, возникающий из-за однофазного напряжения, является только переменным потоком. Переменный поток , действующий на неподвижном роторе (может быть скользящее кольцом или с короткозамкнутым ротором) не может производить вращение на роторе, и , следовательно, однофазный асинхронный двигатель не «самозапускает» двигатель, тогда как асинхронный двигатель трехфазного тока является «самозапускающимся» двигателем. Чтобы преодолеть этот недостаток однофазного асинхронного двигателя и заставить двигатель самозапускаться, статор однофазного двигателя снабжен двумя обмотками, питающимися от одной и той же фазы.
1) Первоначальная обмотка
2) Главная обмотка.
Эти две обмотки разнесены на 90 градусов и подключены параллельно к напряжению питания. Ток, протекающий через эти обмотки, варьируется с помощью некоторых средств, так что величина потока, создаваемого в обмотках статора и рабочих обмотках, различна, и, следовательно, существует некоторая разность фаз между этими двумя магнитными потоками.
Эта разность фаз создает вращающий момент на роторе для запуска. Как только двигатель запускается и достигает номинальной скорости, напряжение питания к пусковым обмоткам может быть остановлено с помощью центробежного переключателя. Как обсуждалось выше, ток через две обмотки варьируется посредством наличия пусковой обмотки с высоким сопротивлением и рабочей обмотки с низким сопротивлением или путем последовательного подключения конденсатора к пусковой обмотке.
Трехфазный асинхронный двигатель и вращающееся магнитное поле
Изображения, показанные ниже, ясно иллюстрируют части электродвигателя и показывают, как работает электродвигатель.




Однофазный асинхронный двигатель
Изображения ниже будут представлять работу однофазного двигателя.


Электрический двигатель
Электродвигатель представляет собой электрическую машину, которая преобразовывает электроэнергию в энергию вращения вала с незначительными тепловыми потерями. Главный принцип работы любого электродвигателя заключается в использовании электромагнитной индукции в качестве основной движущей силы. Для этого конструкция электродвигателя включает:
- Неподвижную часть (статор или индуктор).
- Подвижную часть (ротор или якорь).
В зависимости от предназначения, применяемого рода тока и конструктивных особенностей электрические двигатели имеют большое количество разновидностей.
Двигатели постоянного тока
Электродвигатели постоянного тока объединяют широкий ассортимент устройств, обеспечивающих высокий КПД при трансформации электрической энергии в механическую. Для надежного соединения электрической цепи подвижной и неподвижной части электропривода постоянного тока используют щеточно-коллекторный узел. В зависимости от конструктивных особенностей щеточно-коллекторного узла, все электрические машины постоянного тока подразделяют на следующие группы:
- Коллекторные.
- Бесколлекторные.
В свою очередь коллекторные электродвигатели условно разделяют на следующие виды:
- Самовозбуждающиеся.
- С возбуждением от электромагнитов постоянного действия.
Устройства с независимым возбуждением характеризуются низкой мощностью, поэтому данные электроприводы используют для не ответственных операций с низкой нагрузкой. Машины с самовозбуждением подразделяют на:
- Устройства с последовательным возбуждением, где якорь подключается последовательно обмотке возбуждения.
- Электродвигатели с параллельным возбуждением, где якорь включается параллельно обмотке возбуждения.
- Электропривод смешанного возбуждения, который характеризуется наличием параллельных и последовательных соединений.
Двигатели переменного тока
Электродвигатели переменного тока представлены широкой номенклатурой устройств, которые различают по многочисленным конструктивным и эксплуатационным характеристикам. В зависимости от скорости вращения ротора выделяют электрические машины синхронного и асинхронного типа.
Синхронные двигатели характеризуются одинаковой скоростью вращения ротора и магнитного поля питающего напряжения. Подобный тип электрических двигателей используют для изготовления устройств с высокой мощностью. Кроме этого существует еще одна разновидность синхронного привода — шаговые двигатели. Они имеют строго заданное в пространстве положение ротора, которое фиксируется подачей питания на обмотку статора. При этом переход из одного положения в другое осуществляется посредством подачи напряжения на требуемую обмотку.
Асинхронный электрический двигатель имеет частоту вращения ротора отличную от частоты вращения магнитного поля питающего напряжения. В настоящее время этот тип электродвигателей получил самое широкое распространение как на производстве, так и в быту.
В зависимости от количества фаз питающего напряжения электропривод принадлежит к одной из групп:
- 1-нофазные;
- 2-хфазные;
- 3-хфазные;
- многофазные.
Категория размещения и климатическое исполнение
Все электродвигатели производят с учетом воздействия во время эксплуатации определенных факторов окружающей среды. По этой причине все электрические машины подразделяют на следующие категории размещения:
- Для помещений с высоким уровнем влажности.
- Для помещений закрытого типа с вентиляцией естественного типа без искусственного регулирования климатических параметров. При этом ограничено воздействие пыли, влаги и УФ- излучения.
- В условиях открытого пространства.
- Для помещений закрытого типа с искусственным регулированием климатических параметров. При этом ограничено воздействие пыли, влаги и УФ-излучения.
- Для помещений с изменением влажности и температуры, которые не отличаются от изменений на улице.
В зависимости от климатического исполнения в соответствии с требованиями ГОСТ 15150 — 69 все электрические двигатели подразделяют на следующие типы исполнения:
- Все возможные макроклиматические районы (В).
- Холодный (ХЛ).
- Все морские районы (ОМ).
- Сухой тропический (ТС).
- Общий (О).
- Умеренный (У).
- Умеренный морской (М).
- Влажный тропический (ТВ).
Категория размещения и климатическое исполнение указывают в условном обозначении электродвигателя на его бирке и в паспорте.
Степень защиты корпуса
Для условного обозначения степени защиты корпуса электрической машины от воздействия вредных факторов окружающей среды используют аббревиатуру IP. При этом на корпусе электропривода указывают следующую информацию:
- Высокий уровень защиты от пыли — IP65, IP66.
- Защищенные — не ниже IP21, IP22.
- С защитой от влаги — IP55, IP5.
- С защитой от брызг и капель — IP23, IP24.
- Закрытое исполнение — IP44 — IP54.
- Герметичные — IP67, IP68.
При подборе электрического двигателя для эксплуатации в условиях воздействия определенных вредных факторов, необходимо тщательно подходить к выбору степени защиты его корпуса.
Общие требования безопасности при монтаже и эксплуатации
При монтаже электрического двигателя необходимо придерживаться следующих требований:
- Перед подключением проверить соответствие частоты и напряжения питающей сети с информацией на паспорте электрического двигателя.
- Перед установкой электрической машины обязательно проводят измерение сопротивления электрической изоляции обмотки статора относительно корпуса. При неудовлетворительных значениях проводят просушивание изоляции до достижения требуемого значения.
- При сопряжении валов необходимо точно соблюдать соосность с допустимым отклонением не более 0,2 мм.
- Для заземления корпуса электродвигателя используют только специальные заземляющие устройства, предусмотренные инструкцией завода производителя.
- Строго запрещен монтаж электропривода под напряжением.
В процессе эксплуатации электрических машин следует придерживаться следующих основных правил:
- Регулярный осмотр состояния электродвигателя является залогом своевременного определения неисправностей.
- Регулярно на протяжении всего срока эксплуатации проводят проверку исправности токовой и тепловой защиты, чистку и смазку, проверку контактных соединений и надежности заземления.
- При наличии повышенного шума или стука, проводят вибродиагностику с целью определения состояния подшипников и других вращающихся деталей.
- Следует исключить длительную работу однофазного электродвигателя в режиме холостого хода, что негативно влияет на срок его службы.
- Запрещается эксплуатация электрического двигателя с неисправной защитой от перегрева, перегрузки или завышенным значением сопротивления контура заземления.
Крановые электродвигатели
Крановые электродвигатели представляют собой асинхронные устройства переменного тока или двигатели постоянного тока с параллельным или последовательным возбуждением.
В отличие от других категорий электродвигателей, крановые электроприводы имеют следующие особенности:
- Большинство крановых электрических двигателей имеет закрытое исполнение корпуса.
- Момент инерции на роторе составляет минимально возможное значение, что обеспечивает минимальные потери энергии во время переходных процессов.
- Кратковременная перегрузка по моменту для крановых двигателей постоянного тока составляет 2,0 — 5,0, а для электромоторов переменного тока 2,3 — 3,5.
- Класс нагревостойкости изоляционных материалов не менее F.
- У кранового электропривода переменного тока в номинальном режиме ПВ составляет не менее 80 минут.
- С целью получения большой перегрузочной способности по моменту добиваются высоких значений магнитного потока.
- Отношение максимально допустимой частоты вращения к номинальному значению для электродвигателей постоянного тока составляет 3,5 — 4,9, а для машин переменного тока 2,5.
Эксплуатация кранового привода характеризуется следующими условиями эксплуатации:
- Частые пуски, реверсы и торможения.
- Регулирование частоты вращения в широком диапазоне значений.
- Повышенная вибрация и тряски.
- Повторно-кратковременный режим работы.
- Воздействие высокой температуры, газа, пыли и пара.
- Значительная перегрузка во время работы.
Общепромышленные электрические двигатели
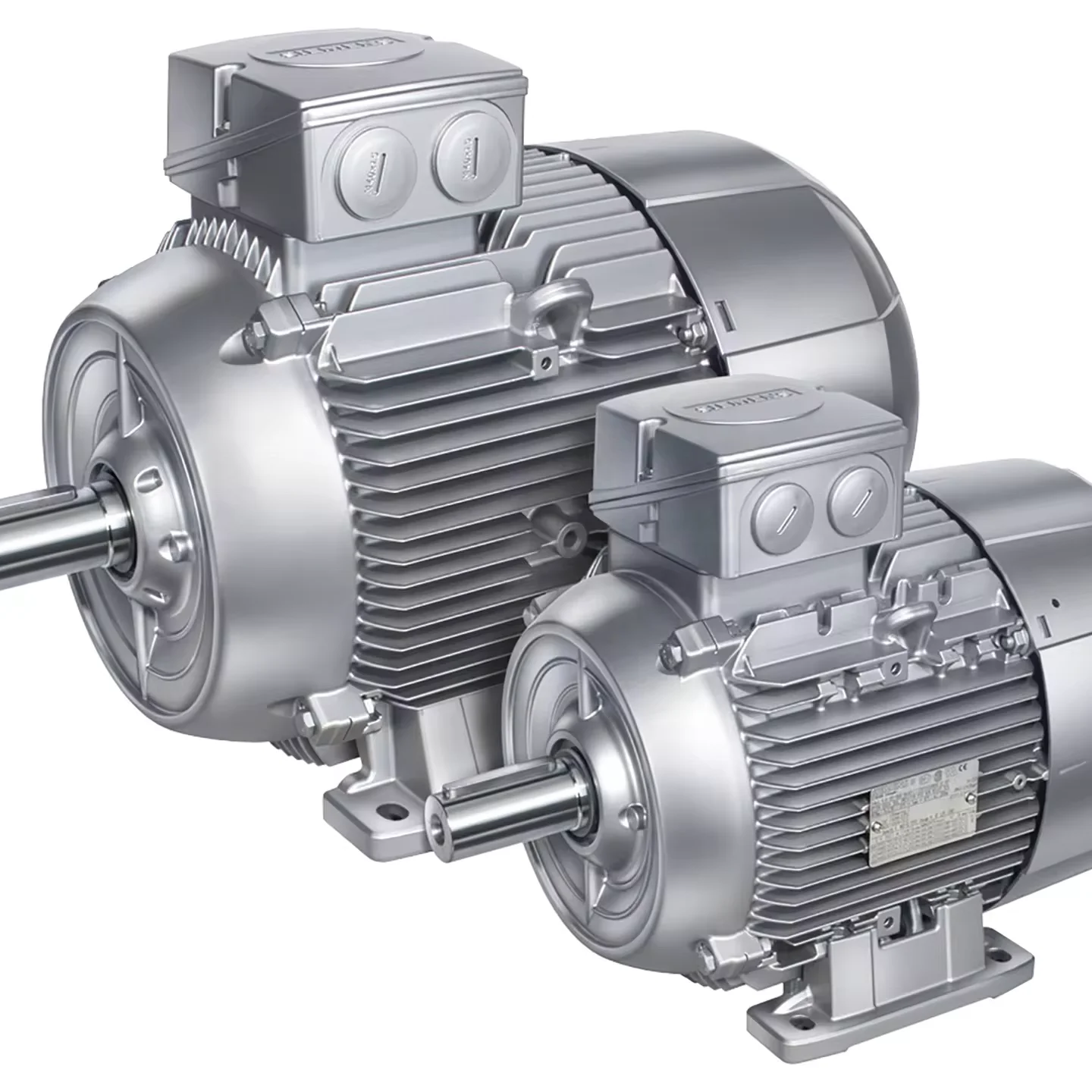
Электродвигатели общепромышленного исполнения применяют для привода механизмов, которые не предъявляют особых требований к показателям КПД, энергосбережения, скольжению и пусковым характеристикам. Они характеризуются повторно-кратковременным режимом работы и изоляцией с классом нагревостойкости класса F. Наиболее популярными в этой категории являются асинхронные электрические двигатели марки АИР с короткозамкнутым ротором. Благодаря многочисленным достоинствам, этот тип электропривода с успехом применяется на всех производственных предприятиях. От продукции других торговых марок его отличает:
- Простая конструкция с отсутствием подвижных контактов.
- Низкая стоимость в сравнении с электрическими машинами других типов.
- Высокая ремонтопригодность всех главных узлов и рабочих элементов.
- Использование напряжения сети 380 В без дополнительных регуляторов или фильтров.
- Монтаж двигателя осуществляется на лапах или фланцах, поэтому происходит в минимально короткий срок.
Электрические машины общепромышленного исполнения находят применение в сферах деятельности, где нет необходимости в высоких эксплуатационных параметрах: вентиляционные системы, насосные станции, станочное оборудование, компрессорные установки и др. Эксплуатация общепромышленных электродвигателей осуществляется в двух основных режимах: генераторный и двигательный. При этом в генераторном режиме электрические двигатели являются источником электроэнергии за счет преобразования механической энергии вращения вала. В двигательном режиме привод общепромышленного исполнения потребляет электроэнергию и превращает её в механическую энергию вращения вала.
Электрические двигатели с электромагнитным тормозом
Электрический привод с электромагнитным тормозом предназначен для эксплуатации в повторно-кратковременном или кратковременном режиме. Он разработан специально для механизмов, которые требуют форсированной остановки в строго регламентированное время. К таким механизмам относят: электрические тали, автоматизированные складские системы, обрабатывающие станки и др. Тормозной механизм, как правило, располагают со стороны противоположной валу двигателя. Он обеспечивает быстрое торможение электрического привода при отключении питания, а при повторной подаче напряжения растормаживает его.
Электрические машины со встроенным электромагнитным тормозом работают по следующему принципу:
- Электромагнитную катушку тормоза подключают последовательно к одной из фазных обмоток электродвигателя.
- Катушка получает постоянное напряжение посредством выпрямляющего устройства, которое располагают возле коробки с выводами или переменное напряжение непосредственно с обмотки электродвигателя.
- При отсутствии фазного напряжения катушка обесточивается, и якорь прочно зажимает блокировочный механизм.
- После восстановления электрического питания катушка подтягивает якорь, что позволяет валу двигателя свободно перемещаться.
В зависимости от способа монтажа электромоторы со встроенным электромагнитным тормозом изготавливают в следующих исполнениях:
- С горизонтальным валом.
- С вертикальным валом.
Благодаря своим преимуществам по времени остановки вала электродвигателя, этот тип электропривода обеспечивает надежную и безопасную эксплуатацию устройств с высокими требованиями к позиционированию или аварийной остановке.
Источник: Технический отдел ЗАО «КранЭлектроМаш»
Электродвигатель: понятие, типы
Электродвигатель — это электрическая машина, в которой электрическая энергия преобразуется в механическую. Существует несколько типов электродвигателей: синхронные, асинхронные и двигатели постоянного тока.
Синхронные двигатели
Синхронные двигатели имеют большую мощность (50-100кВт и более), по сравнению с другими двигателями, применяются на металлургических заводах, в шахтах и других предприятиях, служат для приведения в движения насосов, компрессоров, вентиляторов, двигательно-генераторных установок и др.
Особенностью синхронных электродвигателей определяющей их функциональные возможности и области применения, является постоянство средней частоты вращения при неизменной частоте, амплитуде напряжения питания и колебания момента нагрузки. Следовательно, при снижении напряжения синхронный двигатель сохраняет большую перегрузочную способность, а возможность форсировки возбуждения увеличивает надежность работы при аварийных понижениях напряжения. Большой воздушный зазор и применение постоянных магнитов делает КПД синхронных двигателей выше.
Синхронный двигатель состоит из неподвижного статора и вращающегося ротора. В пазах статора размещена обмотка переменного тока, получающая питание от сети, а в роторе – обмотка постоянного тока. Электродвигатели вращают, ротор синхронно с магнитным полем питающего напряжения. Расположенная на роторе обмотка возбуждения получает питание от источника постоянного тока через контактные кольца. В основном применяются на приводах большой мощности. Мощность такого электродвигателя достигает несколько десятков мегаватт.
Имея столько достоинств, синхронные двигатели имеют ограничение в применении — сложностью конструкций, наличием возбудителя, высокой ценой и сложностью пуска.
Асинхронные двигатели
Асинхронные двигатели подразделяются на двигатели с короткозамкнутым и фазным ротором. Электродвигатели мощностью больше 0,5 кВт обычно выполняются трехфазными, а при меньшей мощности однофазными.
Асинхронные электродвигатели применяются в станкостроении, сельском хозяйстве, деревообрабатывающей и металлообрабатывающей промышленности, строительной технике и др. Такие электродвигатели давно известны отечественному рынку. Эти электродвигатели имеют не высокую стоимость, неприхотливы в обслуживании и просты в конструкции.
При выборе асинхронного электродвигателя необходимо учитывать два фактора: КПД преобразования энергии и тип исполнения агрегата. Существует множество аналогов электродвигателей марки АИР (АИР марка электродвигателей, которая не привязана к определенному заводу), например новые современные электродвигателе 5АИ. В работе этого оборудования используются менее шумные подшипники, повышенная степень защиты: исполнение IP55, резьбовое отверстие в торце вала и др.
Принцип действия двигателя основан на взаимодействии вращающегося магнитного поля, возникающего при прохождении трехфазного переменного тока по обмоткам статора, в результате чего возникают механические усилия, заставляющие ротор вращаться в сторону вращения магнитного поля, при условии, что частота вращения ротора меньше частоты вращения поля. Асинхронные электродвигатели потребляют реактивную мощность из сети. Предел применения асинхронных электродвигателей с короткозамкнутым ротором определяется мощностью системы электроснабжения конкретного предприятия, так как большие пусковые токи при малой мощности системы создают большие понижения напряжения.
Двигатели постоянного тока
Принцип работы основан на электромагнитном преобразовании энергии. Широко применяются в промышленности, транспортных и других установках, где требуется плавное регулирование скорости вращения (прокатные станы, мощные металлорежущие станки, электрическая тяга на транспорте и т. д.).
Различаются двигатели с параллельным, независимым, последовательным и смешанным возбуждением.
- Двигатели постоянного тока с независимым или параллельным возбуждением, подключенные к сети с постоянным напряжением, может работать как в генераторном, так и в двигательном режиме и переходить из одного режима работы в другой. Двигатели с параллельным возбуждением имеют параллельное подключение обмотки возбуждения с обмоткой якоря к сети. Если в двигателе обмотка якоря и обмотка возбуждения подключены к источникам питания с различными напряжениями, то его называют двигателем с независимым возбуждением. Такие двигатели применяют в электрических приводах, у которых питание обмотки якоря осуществляется от генератора или полупроводникового преобразователя.
- Двигатели с последовательным возбуждением широко применяются в различных электрических приводах, особенно там, где имеется изменение нагрузочного момента в широких пределах и тяжелые условия пуска (грузоподъемные и поворотные механизмы, тяговый привод и пр.).
- Двигатель со смешанным возбуждением, благодаря магнитному потоку создает совместное действие двух обмоток возбуждения – параллельной и последовательной.
Принцип работы электродвигателя основывается на эффекте обнаруженном Майклом Фарадеем еще в 1821 году. Он сделал открытие, что при взаимодействии электрического тока в проводнике и магнита, может возникнуть непрерывное вращение.
Принцип работы электродвигателя постоянного тока
Если в однородном магнитном поле расположить в вертикальном положении рамку и пропустить по ней ток, тогда вокруг проводника возникнет электромагнитное поле, которое будет взаимодействовать с полюсами магнитов. От одного рамка будет отталкиваться, а к другому притягиваться. В результате рамка повернется в горизонтальное положение, в котором будет нулевым воздействие магнитного поля на проводник. Для того что бы вращение продолжилось необходимо добавить еще одну рамку под углом или изменить направление тока в рамке в подходящий момент. На рисунке выше это делается при помощи двух полуколец, к которым примыкают контактные пластины от батарейки. В результате после совершения полуоборота меняется полярность и вращение продолжается.
В современных электродвигателях вместо постоянных магнитов для создания магнитного поля используются катушки индуктивности или электромагниты. Если разобрать любой мотор, то Вы увидите намотанные витки проволоки, покрытой изоляционным лаком. Эти витки и есть электромагнит или как их еще называют обмотка возбуждения.
Простыми словами о сложном
На самом деле там векторное произведение, дифференциалы и т.п. но это детали, а у нас упрощённый случай. И так…
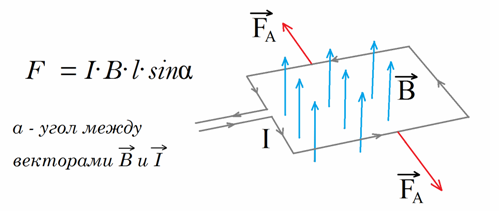
Рис. 1 Основа работы электрического двигателя
Направление силы ампера определяется правилом левой руки.
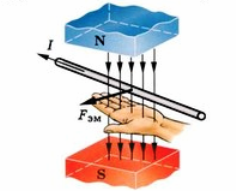
Рис. 2 Правило левой руки
Мысленно ставим левую ладонь на верхний рисунок и получаем направление сил Ампера. Она типа растягивают рамку с током в том положении как нарисовано на рис.1. И никуда вертеться тут ничего не будет, рамка в равновесии, устойчивом.
А если рамка с током повернута по-другому, то вот что будет:
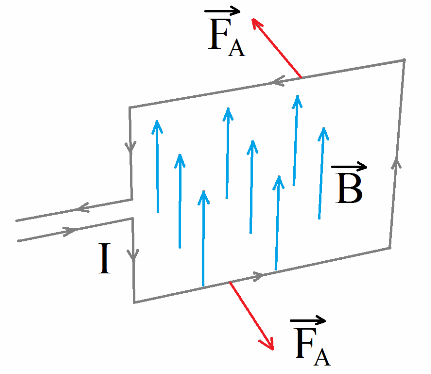
Рис. 3 Рамка
Здесь уже равновесия нет, сила Ампера разворачивает противоположные стенки так, что рамка начинает вращаться. Появляется механическое вращение. Это основа электрического двигателя, самая суть, дальше только детали.
Далее.
Теперь что будет делать рамка с током на рис.3?. Если система идеальная, без трения, то очевидно будут колебания. Если трение присутствует, то колебания постепенно затухнут, рамка с током стабилизируется и станет как на рис.1.
Но нам нужно постоянное вращение и достичь его можно двумя принципиально разными способами и отсюда и возникает разница между двигателями постоянного и переменного трёхфазного тока.
Принцип работы электродвигателя постоянного тока
Способ 1. Смена направления тока в рамке.
Этот способ используется в двигателях постоянного тока и его потомках.
Наблюдаем за картинками. Пусть наш двигатель обесточен и рамка с током ориентирована как-то хаотично, вот так например:
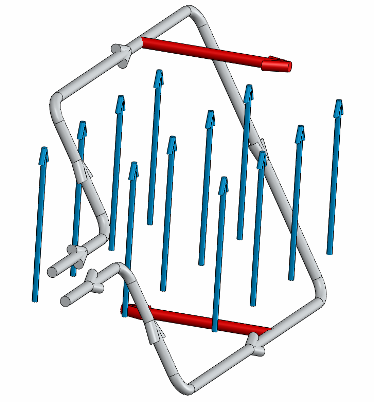
Рис. 4.1 Случайно расположенная рамка
На случайно расположенную рамку действует сила Ампера и она начинает вращаться.
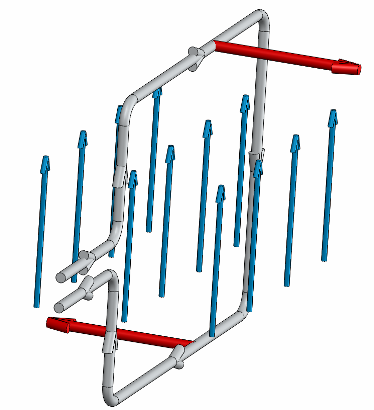
Рис. 4.2
В процессе движения рамка достигает угла 90°. Момент (момент пары сил или вращательный момент) максимальный.
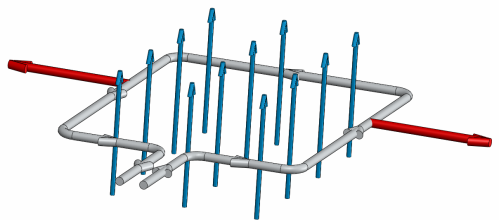
Рис. 4.3
И вот рамка достигает положения, когда момента вращения нет. И если сейчас не отключить ток, то сила Ампера будет уже тормозить рамку и в конце полуоборота рамка остановится и начнёт вращение в противоположном направлении. Но нам ведь этого не надо.
Поэтому мы на рис.3 делаем хитрый ход – меняем направление тока в рамке.
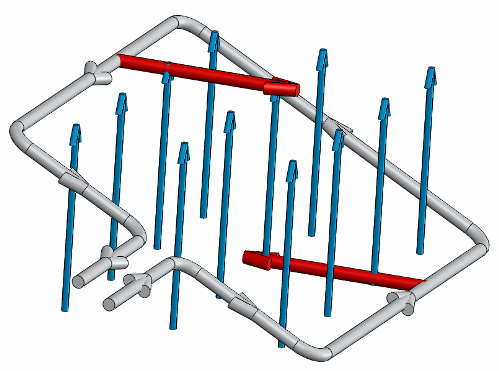
Рис. 4.4
И вот после пересечения этого положения, рамка с поменянным направлением тока уже не тормозится, а снова разгоняется.

Рис. 4.5
А когда рамка подходит к следующему положению равновесия, мы меняем ток ещё раз.
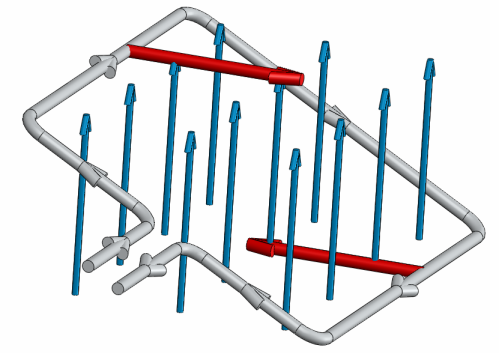
Рис. 4.6
И рамка опять продолжает ускоряться куда нам надо.
Вот так и получается постоянное вращение. Красиво? Красиво. Нужно только менять направление тока два раза за оборот и всего делов.
А делает это, т.е. обеспечивает смену тока специальный узел – щёточно-коллекторный узел. Принципиально он устроен так:
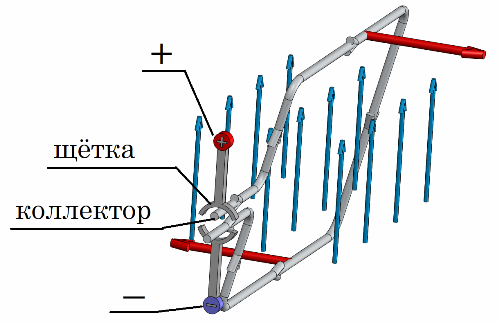
Рис. 5
Рисунок понятен и без пояснений. Рамка трётся то об один контакт, то об другой и так вот ток и меняется.
Очень важная особенность щёточно-коллекторного узла – его малый ресурс. Из-за трения. Например, вот движок ДПР-52-Н1 – минимальная наработка 1000 часов. В то же время срок службы современных бесколлекторных двигателей более 10000 часов, а двигателей переменного тока (там тоже нет ЩКУ) более 40000 часов.
Принцип работы электродвигателя переменного тока
Способ 2. Вращается магнитный поток, т.е. магнитное поле.
Вращающееся магнитное поле получают с помощью переменного трёхфазного тока. Вот есть статор.
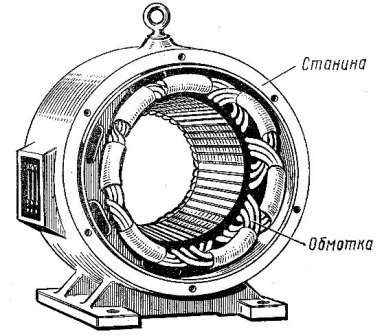
Рис. 6 Статор электродвигателя
А есть значит 3 фазы переменного тока.
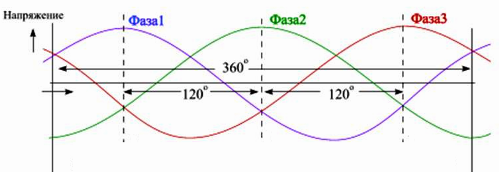
Рис. 7
Между ними как видно на Рис. 7 120 градусов, электрических градусов.
Эти три фазы укладывают в статор специальным образом, чтобы они геометрически были повернуты друг к дружке на 120°.
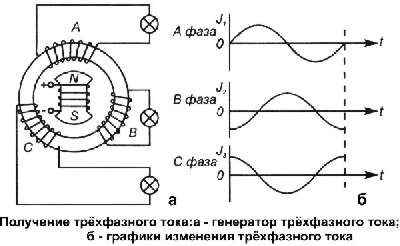
Рис. 8
И тогда при подаче трёхфазного питания получается само собой за счёт складывания магнитных потоков от трёх обмоток вращающееся магнитное поле.
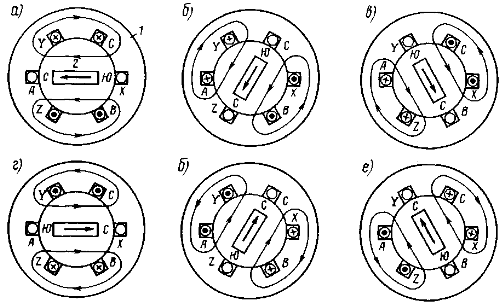
Рис. 9 Вращающееся магнитное поле
Далее вращающееся магнитное поле влияет силой Ампера на нашу рамку и она вращается.
Но здесь есть тоже различия, два разных способа.
Способ 2а. Рамка запитывается (синхронный двигатель).
Подаём значит на рамку напряжение (постоянное), рамка выставляется по магнитному полю. Помните рис.1 из самого начала? Вот так рамка и становится.
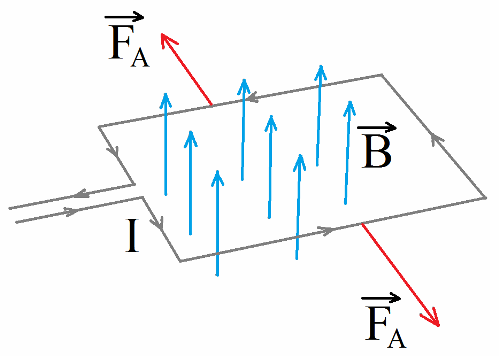
Рис. 10 (Рис.1)
Но поле магнитное у нас тут вращается, а не просто так висит. Рамка чего будет делать? Тоже будет вращаться, следуя за магнитным полем.
Они (рамка и поле) вращаются с одинаковой частотой, или синхронно, поэтому такие двигатели называются синхронными двигателями.
Способ 2б. Рамка не запитывается (асинхронный двигатель).
Фишка в том, что рамка не запитывается, совсем не запитывается. Просто проволока такая замкнутая.
Когда мы начинаем вращать магнитное поле, по законам электромагнетизма в рамке наводится ток. От этого тока и магнитного поля получается сила Ампера. Но сила Ампера будет возникать только если рамка движется относительно магнитного поля (известная история с опытами Ампера и его походами в соседнюю комнату).
Так что рамка всегда будет отставать от магнитного поля. А то, если она его вдруг почему-то догонит, то пропадёт наводка от поля, пропадёт ток, пропадёт сила Ампера и всё вообще пропадёт. То есть, в асинхронном двигателе рамка всегда отстаёт от поля и частота у них значит разная, то есть вращаются они асинхронно, поэтому и двигатель называется асинхронным.
Смотрите также по этой теме:
Как работает электродвигатель. Преимущества и недостатки разных видов.
Асинхронный двигатель. Устройство и принцип работы.
Будем рады, если подпишетесь на наш Блог!
[wysija_form id=»1″]
Наиболее распространены магнитоэлектрические двигатели, которые по типу потребляемой энергии подразделяется на две большие группы — на двигатели постоянного тока и двигатели переменного тока (также существуют универсальные двигатели, которые могут питаться обоими видами тока).
Двигатель постоянного тока — электрический двигатель, питание которого осуществляется постоянным током. Данная группа двигателей в свою очередь по наличию щёточно-коллекторного узла подразделяется на:
- коллекторные двигатели;
- бесколлекторные двигатели.
Щёточно-коллекторный узел обеспечивает электрическое соединение цепей вращающейся и неподвижной части машины и является наиболее ненадежным и сложным в обслуживании конструктивным элементом.
По типу возбуждения коллекторные двигатели можно разделить на:
- двигатели с независимым возбуждением от электромагнитов и постоянных магнитов;
- двигатели с самовозбуждением .
Двигатели с самовозбуждением делятся на:
- Двигатели с параллельным возбуждением;(обмотка якоря включается параллельно обмотке возбуждения)
- Двигатели последовательного возбуждения;(обмотка якоря включается последовательно обмотке возбуждения)
- Двигатели смешанного возбуждения.(обмотка возбуждения включается частично последовательно частично параллельно обмотке якоря)
Бесколлекторные двигатели (вентильные двигатели) — электродвигатели, выполненные в виде замкнутой системы с использованием датчика положения ротора, системы управления (прео
Электрический двигатель
- Статья опубликована 26.06.2014 06:06
- Последняя правка произведена 27.01.2016 18:29
Определение.
Электрический двигатель – механизм или специальная машина, предназначенная для преобразования электрической энергии в механическую, при котором так же выделяется тепло.
Предыстория.
 Якоби Борис Семенович
Якоби Борис Семенович
Уже в 1821 году, знаменитый британский ученый Майкл Фарадей продемонстрировал принцип преобразования электромагнитным полем электрической энергии в механическую энергию. Установка состояли из подвешенного провода, которых окунался в ртуть. Магнит устанавливался посередине колбы с ртутью. При замыкании цепи, провод начинал вращение вокруг магнита, демонстрируя то, что вокруг провода, эл. током, образовывалось электрическое поле.
Эту модель двигателя часто демонстрировали в школах и университетах. Данный двигатель считается самым простым видом из всего класса электродвигателей. Впоследствии он получил продолжение в виде Колеса Барлова. Однако новое устройство носило лишь демонстрационный характер, поскольку вырабатываемые им мощности были слишком малы.
Ученые и изобретатели работали над двигателем с целью использования его в производственных нуждах. Все они стремились к тому, чтобы сердечник двигателя двигался в магнитном поле вращательно-поступательно, на манер поршня в цилиндре паровой машины. Русский изобретатель Б.С. Якоби сделал все гораздо проще. Принцип работы его двигателя заключался в попеременном притяжении и отталкивании электромагнитов. Часть электромагнитов были запитаны от гальванической батареи, и направление течения тока в них не менялась, а другая часть подключалась к батарее через коммутатор, благодаря которому изменялось направление течения тока через каждый оборот. Полярность электромагнитов менялась, и каждый из подвижных электромагнитов то притягивался, то отталкивался от соответствующего ему неподвижного электромагнита. Вал приходил в движение.
 электродвигатель Бориса Якоби
Изначально мощность двигателя была небольшой и составляла всего 15 Вт, после доработок, Якоби удалось довести мощность до 550 Вт.. 13 сентября 1838 году, лодка, оборудованная этим двигателем, плыла с 12 пассажирами по Неве, против течения, развивая при этом скорость в 3 км/ч. Двигатель был запитан от большой батареи, состоящей из 320 гальванических элементов. Мощность современных электрических двигателей превышает 55 кВт. По вопросом прибретения электрических двигателей смотрите здесь.
электродвигатель Бориса Якоби
Изначально мощность двигателя была небольшой и составляла всего 15 Вт, после доработок, Якоби удалось довести мощность до 550 Вт.. 13 сентября 1838 году, лодка, оборудованная этим двигателем, плыла с 12 пассажирами по Неве, против течения, развивая при этом скорость в 3 км/ч. Двигатель был запитан от большой батареи, состоящей из 320 гальванических элементов. Мощность современных электрических двигателей превышает 55 кВт. По вопросом прибретения электрических двигателей смотрите здесь.
Принцип действия.
В основу работы электрической машины заложено явление электромагнитной индукции (ЭМИ). Явление ЭМИ заключается в том, что при любом изменении магнитного потока, пронизывающего замкнутый контур, в нем (контуре) образуется индукционный ток.
Сам двигатель состоит из ротора (подвижной части – магнита или катушки) и статора (неподвижной части – катушки). Чаще всего конструкция двигателя представляет собой две катушки. Статор обложен обмоткой, по которой, собственно, и течет ток. Ток порождает магнитное поле, которое воздействует на другую катушку. В ней, по причине ЭМИ, так же образуется ток, который порождает магнитное поле, действующее на первую катушку. И так все повторяется по замкнутому циклу. В итоге, взаимодействие полей ротора и статора создает вращающий момент, приводящий в движение ротор двигателя. Таким образом, происходит трансформация электрической энергии в механическую, которую можно использовать в различных приборах, механизмах и даже в автомобилях.

Вращающееся магнитное поле



Вращение электромотора
Классификация электрических двигателей.
По способу питания:
• двигатели постоянного тока – запитываются от источников постоянного тока.
• двигатели переменного тока — запитываются от источников переменного тока.
• универсальные двигатели – запитываются как от постоянного, так и переменного тока.
По конструкции:
Коллекторный электродвигатель — электродвигатель, в котором в качестве датчика положения ротора и переключателя тока используется щеточноколлекторный узел.
Бесколлекторый электродвигатель – электродвигатель, состоящий из замкнутой системы, в которой используются: системы управления (преобразователь координат), силовой полупроводниковый преобразователь (инвертор), датчик положения ротора (ДПР).
• С приведением в действие постоянными магнитами;
• С параллельным соединением якоря и обмоток возбуждения;
• С последовательным соединением якоря и обмоток возбуждения;
• Со смешанным соединением якоря и обмоток возбуждения;
 трехфазные асинхронные двигатели
трехфазные асинхронные двигатели
По количеству фаз:
• Однофазные – запускаются вручную, либо же имеют пусковую обмотка или фазосдвигающую цепь.
• Двухфазные
• Трехфазные
• Многофазные
По синхронизации:
• Синхронный электродвигатель – электрический двигатель переменного тока с синхронным движением магнитного поля питающего напряжения и ротора.
• Асинхронный электродвигатель – электрический двигатель переменного тока с отличающейся частотой движения ротора и магнитного поля, порождаемого питающим напряжением.
История создания электродвигателя
Электромеханика является относительно молодой, по историческим меркам, отраслью науки и техники.
1800, Вольта
Итальянский физик, химик и физиолог, Алессандро Вольта, первый в мире создал химический источник тока.
1820, Эрстед
Датский ученый, физик, Ханс Кристиан Эрстед, обнаружил на опыте отклоняющее действие тока на магнитную стрелку.
1821, Фарадей

Первый электродвигатель Фарадея, 1821 г.
Британский физик-экспериментатор и химик, Майкл Фарадей, опубликовал трактат «О некоторых новых электромагнитных движениях и о теории магнетизма», где описал, как заставить намагниченную стрелку непрерывно вращаться вокруг одного из магнитных полюсов. Эта конструкция впервые реализовала непрерывное преобразование электрической энергии в механическую. Принято считать ее первым электродвигателем в истории.
1822, Ампер
Французский физик, Андре Мари Ампер, открыл магнитный эффект соленоида (катушки с током), откуда следовала идея эквивалентности соленоида постоянному магниту. Среди прочего Ампер предложил использовать железный сердечник, помещенный внутрь соленоида, для усиления магнитного поля. В 1820 году им был открыт закон Ампера.
1822, Барлоу
Английский физик и математик, Питер Барлоу, изобрел колесо Барлоу, по сути, униполярный электродвигатель.
1825, Араго
Французский физик и астроном, Доминик Франсуа Жан Араго, опубликовал опыт показывающий, что вращающийся медный диск заставляет вращаться магнитную стрелку, подвешенную над ним.
1825, Стёрджен
Британский физик, электротехник и изобретатель, Уильям Стёрджен, в 1825 изготовил первый электромагнит, который представлял из себя согнутый стержень из мягкого железа с обмоткой из толстой медной проволоки.

Вращающееся устройство Йедлика, 1827/28 гг.
1827, Йедлик
Венгерский физик и электротехник, Аньош Иштван Йедлик, изобрел первую в мире динамо-машину (генератор постоянного тока), однако практически не объявлял о своем изобретении до конца 1850-х годов.
1831, Фарадей
Английский физик, Майкл Фарадей, открыл электромагнитную индукцию, то есть явление возникновения электрического тока в замкнутом контуре при изменении магнитного потока, проходящего через него. Формулировка закона электромагнитной индукции.
1831, Генри
Американский физик, Джозеф Генри, независимо от Фарадея обнаружил взаимоиндукцию, но Фарадей раньше опубликовал свои результаты.
1832, Пикси

Генератор постоянного тока Пикси
Француз, Ипполит Пикси, сконструировал первый генератор переменного тока. Устройство состояло из двух катушек индуктивности с железным сердечником напротив которых располагался вращающийся магнит подковообразной формы, который приводился в движение вращением рычага. Позже для получения постоянного пульсирующего тока к этому устройству был добавлен коммутатор.

Электродвигатель Стёрджена
Strurgejn’s Annals of Electricity, 1836/37, vol. 1
1833, Стёрджен
Британский физик, Уильям Стёрджен, публично продемонстрировал электродвигатель на постоянном токе в Марте 1833 года в Аделаидской галерее практической науки в Лондоне. Данное изобретение считается первым электродвигателем, который можно было использовать.
1833, Ленц
В начале в электромеханике разграничивали магнито-электрические машины (электрические генераторы) и электро-магнитные машины (электрические двигатели). Российский физик (немецкого происхождения), Эмилий Христианович Ленц, опубликовал статью о законе взаимности магнито-электрических явлений, то есть о взаимозаменяемости электрического двигателя и генератора.
Май 1834, Якоби

Первый вращающийся электродвигатель. Якоби, 1834
Немецкий и русский физик, академик Императорской Санкт-Петербургской Академии Наук, Борис Семенович (Мориц Герман фон) Якоби, изобрел первый в мире электродвигатель с непосредственным вращением рабочего вала. Мощность двигателя составляла около 15 Вт, частота вращения ротора 80-120 оборотов в минуту. До этого изобретения существовали только устройства с возвратно-поступательным или качательным движением якоря.
1836 — 1837, Дэвенпорт
Проводя эксперименты с магнитами, американский кузнец и изобретатель, Томас Дэвенпорт, создает свой первый электромотор в июле 1834 года. В декабре этого же года он впервые продемонстрировал свое изобретение. В 1837 году Дэвенпорт получил первый патент (патент США №132) на электрическую машину.
1839, Якоби
Используя электродвигатель питающийся от 69 гальванических элементов Грове и развивающий 1 лошадиную силу, в 1839 г. Якоби построил лодку способную двигаться с 14 пассажирами по Неве против течения. Это было первое практическое применение электродвигателя.
1837 — 1842, Дэвидсон
Шотландский изобретатель, Роберт Дэвидсон, занимался разработкой электродвигателя с 1837 года. Он сделал несколько приводов для токарного станка и моделей транспортного средства. Дэвидсон изобрел первый электрический локомотив.
1856, Сименс
Немецкий инженер, изобретатель, ученый, промышленник, основатель фирмы Siemens, Вернер фон Сименс изобрел электрический генератор с двойным T-образным якорем. Он первый разместил обмотки в пазах.
1861-1864, Максвелл
Британский физик, математик и механик, Джеймс Клерк Максвелл, обобщил знания об электромагнетизме в четырех фундаментальных уравнениях. Вместе с выражением для силы Лоренца уравнения Максвелла образуют полную систему уравнений классической электродинамики.
1871-1873, Грамм
Бельгийский изобретатель, Зеноб Теофил Грамм, устранил недостаток электрических машин с двух-Т-образным якорем Сименса, который заключался в сильных пульсациях вырабатываемого тока и быстром перегреве. Грамм предложил конструкцию генератора с самовозбуждением, который имел кольцевой якорь.
1885, Феррарис
Итальянский физик и инженер, Галилео Феррарис, изобрел первый двухфазный асинхронный электродвигатель. Однако Феррарис думал, что такой двигатель не сможет иметь КПД выше 50%, поэтому он потерял интерес и не продолжал улучшать асинхронный электродвигатель. Считается, что Феррарис первым объяснил явление вращающегося магнитного поля.
1887, Тесла
Американец сербского происхождения, изобретатель, Никола Тесла, работая независимо от Феррариса, изобрел и запатентовал двухфазный асинхронный электродвигатель с явно выраженными полюсами статора (сосредоточенными обмотками). Тесла ошибачно считал что двухфазная система токов оптимальна с экономической точки зрения среди всех многофазных систем.
1889-1891, Доливо-Добровольский
Русский электротехник польского происхождения, Михаил Осипович Доливо-Добровольский, прочитав доклад Феррариса о вращающемся магнитном поле изобрел ротор в виде «беличьей клетки». Дальнейшая работа в этом направлении привела к разработке трехфазной системы переменных токов и трехфазного асинхронного электродвигателя, получившего широкое применение в промышленности и практически не изменившегося до нашего времени.
Широкое внедрение электромеханических устройств в России начинается после Октябрьской революции 1917 г., когда электрификация всей страны стала основой технической политики нового государства. Можно сказать, что XX век стал веком становления и широкого распространения электромеханики.
Выбор между двухфазной и трехфазной системой
Доливо-Добровольский справедливо считал, что увеличение числа фаз в двигателе улучшает распределение намагничивающей силы по окружности статора. Переход к трехфазной системы от двухфазной уже дает большой выигрыш в этом отношении. Дальнейшее увеличение числа фаз нецелесообразно, так как приводит к значительному увеличению расходов металла на провода.
Для Теслы же казалось очевидным, что чем меньше число фаз, тем меньше требуется проводов, и следовательно тем дешевле устройство электропередачи. При этом двухфазная система передачи требовала применения четырех проводов, что представлялось не желательным в сравнении с двух проводными системами постоянного или однофазного переменного токов. Поэтому Тесла предлагал применять трех проводную линию для двухфазной системы, делая один провод общим. Но это не сильно уменьшало количество затрачиваемого на систему металла, так как общий провод должен был быть большего сечения.
Таким образом трехфазная система токов предложенная Доливо-Добровольским была оптимальной для передачи энергии. Она практически сразу нашла широкое применение в промышленности и до наших дней является основной системой передачи электрической энергии во всем мире.
типов электродвигателей и их применение
 Электродвигатель представляет собой электромеханическое устройство, которое преобразует электрическую энергию в механическую энергию. В основном, есть три типа электродвигателей: двигатели переменного тока (синхронные и асинхронные двигатели), двигатели постоянного тока (щеточные и бесщеточные) и двигатели специального назначения.
Электродвигатель представляет собой электромеханическое устройство, которое преобразует электрическую энергию в механическую энергию. В основном, есть три типа электродвигателей: двигатели переменного тока (синхронные и асинхронные двигатели), двигатели постоянного тока (щеточные и бесщеточные) и двигатели специального назначения.
Каков принцип работы электродвигателя?
- Когда токопроводящий проводник расположен во внешнем магнитном поле, перпендикулярном проводнику, он испытывает силу, перпендикулярную себе и внешнему магнитному полю.
- Правило правой руки для силы на проводнике может использоваться для определения направления силы, действующей на проводник: если большой палец правой руки указывает в направлении тока в проводнике и пальцы силы на проводник направлен наружу от ладони правой руки.
- Аналоговые электрические счетчики (то есть гальванометр, амперметр, вольтметр) работают по принципу двигателя. Электродвигатели являются важным применением принципа двигателя.
Конструкция 
Электродвигатель состоит из постоянного внешнего полевого магнита (статора) и спирального проводящего амперметра (ротора), который может свободно вращаться внутри полевого магнита. Щетки и коммутатор (сконструированные по-разному, если на якорь подается ток переменного или постоянного тока) подключаются к якорю к внешнему источнику напряжения. Скорость вращения двигателя зависит от количества тока, протекающего через него, количества катушек на якоре, силы магнитного поля, проницаемости якоря и механической нагрузки, связанной с валом.
Типы двигателей
Как правило, электродвигатели подразделяются на два типа (двигатели переменного тока и двигатели постоянного тока).
сейчас!
Мы подробно узнаем о подтипах двигателей переменного тока и двигателей постоянного тока.
Типы двигателей переменного тока
Синхронные двигатели
Существует два типа синхронных двигателей.
- Обычная
- Супер
асинхронных двигателей
-
асинхронных двигателей
-
коллекторных двигателей
- Серия
- компенсированный
- Шунт
- отталкивание
- Repulsionl стартером индукции
- отталкивание индукции
Классификация, основанная на типе тока
Классификация, основанная на скорости работы
- Постоянная скорость.
- Переменная скорость.
- Регулируемая скорость.
Классификация на основе конструктивных особенностей
- Открытый
- Закрытый
- Полузакрытый
- Вентилируемый
- Вентилируемый трубами
- Прямоугольный каркас с проушинами
Типы двигателей постоянного тока Большинство типов двигателей постоянного тока типы — - Двигатели с постоянными магнитами
- Двигатель постоянного тока с щеткой
- Двигатель с шунтирующим током постоянного тока
Двигатель с последовательным намоткой -
Двигатель с постоянным магнитом -
- Совокупный состав
- Двигатель с дифференциальным соединением
- Двигатель постоянного тока с постоянным магнитом Отдельно возбужденный
- Бесщеточный двигатель постоянного тока
- Двигатели постоянного тока без сердечника или без железа
- Двигатели постоянного тока с печатной арматурой или блинчиком
- Универсальные двигатели
Двигатель постоянного тока 
В общем, двигатели постоянного тока наиболее желательны в двух ситуациях.Во-первых, когда единственным доступным источником питания является постоянный ток, что происходит в автомобилях и небольших устройствах с питанием от батареи. Другой случай, когда кривая крутящего момента должна быть тщательно выровнена. По мере развития технологий и манипуляций в двигателях переменного тока это становится менее важным аспектом, но исторически двигатель постоянного тока был прост в настройке, что делает его пригодным для применения в сервоприводе и тяге. С высоким током и низким напряжением относительной скорости. Вариациями стандартного двигателя постоянного тока являются мощность и бесщеточный двигатель постоянного тока, который является очень сложным устройством по сравнению со стандартным двигателем.Двигатели постоянного тока используются в приложениях, требующих управления скоростью или положением, а также когда требуется высокий пусковой крутящий момент, поскольку двигатели переменного тока испытывают трудности в этой области.
Смотрите также:
Двигатели с постоянными магнитами (PM)
- Двигатель с постоянными магнитами (PM) отличается от двигателя постоянного тока с намотанным полем в одном отношении: двигатель PM получает свое поле от постоянного тока магнит, тогда как в двигателе постоянного тока с обмоткой возбуждения поле создается, когда ток поля течет через катушки возбуждения.
- В двигателе с обмоткой возбуждения поток постоянен только до тех пор, пока ток поля поддерживается постоянным. Но, напротив, в двигателе с постоянными магнитами поток всегда постоянен.
- Мощность, производимая любым двигателем, определяется следующим образом:

где, P ° = выходная мощность (в л.с.)
T = крутящий момент (в фунтах-футах)
N рт = ротор скорость (об / мин)
- Выходная мощность, таким образом, пропорциональна произведению крутящего момента и скорости.
Двигатели с постоянными магнитами можно разделить на 3 типа:
- Обычный электродвигатель постоянного тока
- Двигатель с подвижной катушкой
- Бесщеточный электродвигатель постоянного тока
Обычный электродвигатель постоянного тока
Обычные электродвигатели с постоянными магнитами содержат узел ротора с полюсными постоянными магнитами связан с роторной втулкой и содержится внутри немагнитной металлической втулки. Обычные узлы ротора включают немагнитный материал, такой как, например, пластик, между каждым из постоянных магнитов для поддержания желаемой ориентации постоянных магнитов на ступице ротора.Посадка с натягом между металлической втулкой и постоянными магнитами плотно прилегает к ротору.
Ротор с подвижной катушкой
Двигатель с подвижной катушкой (MCM), хотя и является двигателем с постоянными магнитами, отличается от обычного первичного двигателя с постоянным током в якоре. MCM является результатом технического требования, согласно которому двигатели имеют высокий крутящий момент, низкую инерцию ротора и низкую электрическую постоянную времени. Эти требования выполняются в MCM.
Моментный двигатель
Можно привести пример, когда все двигатели производили крутящий момент.Поэтому все двигатели можно назвать двигателями с крутящим моментом. Однако моментный двигатель отличается от других двигателей постоянного тока тем, что требуется работать в течение длительных периодов в остановленном состоянии или на низкой скорости. Не все двигатели постоянного тока предназначены для этой операции. Низкий cemf означает, что будет протекать большое количество тока якоря. Большинство обычных двигателей постоянного тока не предназначены для отвода тепла, создаваемого этим большим током. Но моментные двигатели предназначены для работы на низких оборотах или в условиях замедления в течение длительных периодов времени и используются в таких приложениях, как намотка или ленточные накопители.В намоточных устройствах натяжение часто контролируется моментным двигателем.
Шаговый двигатель
- Шаговый двигатель — это действительно цифровой двигатель.
- После того, как ротор делает шаг, он останавливается, пока не получит импульс.
- Шаговый двигатель — это электромеханическое устройство, которое преобразует электрические импульсы в дискретные механические движения.
- Вал или шпиндель шагового двигателя вращаются с дискретным шагом, когда электрические управляющие импульсы подаются на него в правильной последовательности.
- Вращение двигателя имеет несколько прямых связей с этими применяемыми входными импульсами.
- Последовательность приложенных импульсов напрямую связана с направлением вращения валов двигателя. Скорость вращения валов двигателя направлена в зависимости от частоты входных импульсов, а длина вращения напрямую связана с количеством приложенных входных импульсов.
Похожие темы
. Электродвигатель | Британика
Самый простой тип асинхронного двигателя показан в поперечном сечении на рисунке. Трехфазный набор обмоток статора вставлен в пазы утюга статора. Эти обмотки могут быть подключены либо в конфигурации «вай», обычно без внешнего подключения к нейтральной точке, либо в конфигурации «треугольник». Ротор состоит из цилиндрического железного сердечника с проводниками, размещенными в пазах вокруг поверхности. В наиболее обычной форме эти проводники ротора соединены вместе на каждом конце ротора проводящим торцевым кольцом.
Поперечное сечение трехфазного асинхронного двигателя. Encyclopædia Britannica, Inc.
Основу работы асинхронного двигателя можно разработать, предположив сначала, что обмотки статора подключены к трехфазному источнику электропитания и что набор из трех синусоидальных токов формы, показанной на рисунке, течет в обмотках статора. На этом рисунке показано влияние этих токов на создание магнитного поля через воздушный зазор машины в течение шести мгновений в цикле.Для простоты показана только центральная петля проводника для каждой фазовой обмотки. В момент времени t 1 на рисунке ток в фазе a является максимально положительным, в то время как в фазах b и c половина этого значения отрицательна. В результате создается магнитное поле с приблизительно синусоидальным распределением вокруг воздушного зазора с максимальным наружным значением вверху и максимальным внутренним значением внизу. В момент времени т 2 на рисунке (т.е.то есть, одна шестая часть цикла позже), ток в фазе c является максимально отрицательным, в то время как в фазе b и фазе a является половинным положительным значением. Результат, как показано для t 2 на рисунке, снова представляет собой синусоидально распределенное магнитное поле, но повернутое на 60 ° против часовой стрелки. Изучение распределения тока для т 3 , т 4 , т 5 и т 6 показывает, что магнитное поле продолжает вращаться с течением времени.Поле совершает один оборот за один цикл токов статора. Таким образом, объединенный эффект трех равных синусоидальных токов, равномерно смещенных во времени и протекающих в трех обмотках статора, равномерно смещенных в угловом положении, заключается в создании вращающегося магнитного поля с постоянной величиной и механической угловой скоростью, которая зависит от частоты электроснабжение.
Получите эксклюзивный доступ к контенту из нашего первого издания 1768 года с вашей подпиской.
Подпишитесь сегодня
Вращательное движение магнитного поля относительно проводников ротора вызывает индуцирование напряжения в каждом, пропорциональном величине и скорости поля относительно проводников.Поскольку проводники ротора закорачиваются вместе на каждом конце, эффект будет вызывать токи в этих проводниках. В простейшем режиме работы эти токи будут примерно равны индуцированному напряжению, деленному на сопротивление проводника. Структура токов ротора для момента т 1 на рисунке показана на этом рисунке. Видно, что токи приблизительно синусоидально распределены по периферии ротора и расположены так, чтобы создавать вращающий момент против часовой стрелки (т.е.крутящий момент в том же направлении, что и вращение поля). Этот крутящий момент действует для ускорения ротора и вращения механической нагрузки. Когда скорость вращения ротора увеличивается, его скорость относительно скорости вращения поля уменьшается. Таким образом, индуцированное напряжение уменьшается, что приводит к пропорциональному уменьшению тока в проводнике ротора и крутящего момента. Скорость ротора достигает постоянного значения, когда крутящий момент, создаваемый токами ротора, равен крутящему моменту, требуемому на этой скорости нагрузкой, при этом избыточный крутящий момент не доступен для ускорения объединенной инерции нагрузки и двигателя.
Вращающееся поле и токи, возникающие в короткозамкнутых проводниках ротора. Encyclopædia Britannica, Inc.
Механическая выходная мощность должна обеспечиваться электрической входной мощностью. Исходные токи статора, показанные на рисунке, достаточны для создания вращающегося магнитного поля. Для поддержания этого вращающегося поля при наличии токов ротора на фигуре необходимо, чтобы обмотки статора передавали дополнительный компонент синусоидального тока такой величины и фазы, чтобы нейтрализовать влияние магнитного поля, которое могло бы возникнуть в противном случае. токами ротора на рисунке.Общий ток статора в каждой фазной обмотке представляет собой сумму синусоидальной составляющей для создания магнитного поля и другой синусоиды, ведущую первую на четверть цикла или на 90 °, чтобы обеспечить требуемую электрическую мощность. Второй или силовой компонент тока находится в фазе с напряжением, приложенным к статору, тогда как первый или намагничивающий компонент отстает от приложенного напряжения на четверть цикла, или на 90 °. При номинальной нагрузке этот намагничивающий компонент обычно находится в диапазоне 0.От 4 до 0,6 величины силовой составляющей.
Большинство трехфазных асинхронных двигателей работают с обмотками статора, подключенными напрямую к трехфазному источнику постоянного напряжения и частоты. Типичные напряжения питания находятся в диапазоне от 230 вольт между линиями для двигателей относительно малой мощности (например, от 0,5 до 50 кВт) до около 15 кВ от линии к линии для мощных двигателей до примерно 10 мегаватт.
За исключением небольшого падения напряжения в сопротивлении обмотки статора, напряжение питания соответствует скорости изменения магнитного потока в статоре машины.Таким образом, при питании с постоянной частотой и постоянном напряжении величина вращающегося магнитного поля поддерживается постоянной, а крутящий момент приблизительно пропорционален составляющей мощности тока питания.
При использовании асинхронного двигателя, показанного на предыдущих рисунках, магнитное поле вращается на один оборот за каждый цикл частоты питания. Для источника питания 60 Гц полевая скорость составляет 60 оборотов в секунду, или 3600 в минуту. Скорость ротора меньше скорости поля на величину, достаточную для того, чтобы индуцировать требуемое напряжение в проводниках ротора для создания тока ротора, необходимого для момента нагрузки.При полной нагрузке скорость, как правило, на 0,5-5% ниже, чем полевая скорость (часто называемая синхронной скоростью), причем более высокий процент применяется к двигателям меньшего размера. Эта разница в скорости часто называется скольжением.
Другие синхронные скорости можно получить с помощью источника постоянной частоты, построив машину с большим числом пар магнитных полюсов, в отличие от двухполюсной конструкции на рисунке. Возможные значения скорости магнитного поля в оборотах в минуту: 120 f / p , где f — частота в герцах (циклов в секунду), а p — количество полюсов (которое должно быть четное число).Данная железная рама может быть намотана для любого из нескольких возможных чисел пар полюсов с помощью катушек, которые охватывают угол приблизительно (360/ p ) °. Крутящий момент, доступный от рамы машины, останется неизменным, поскольку он пропорционален произведению магнитного поля и допустимому току катушки. Таким образом, номинальная мощность для рамы, являющаяся произведением крутящего момента и скорости, будет примерно обратно пропорциональна числу пар полюсов. Наиболее распространенные синхронные скорости для 60-герцовых двигателей составляют 1800 и 1200 оборотов в минуту.
, Электродвигатель — Простая английская Википедия, бесплатная энциклопедия 
Электродвигатель преобразует электрическую энергию в механическое движение. Динамо или электрический генератор делает обратное: он превращает механическое движение в электрическую энергию. Большинство электродвигателей работают с использованием силы магнетизма. Электростатические двигатели также были использованы.
Машины с электродвигателями включают в себя: вентиляторы, стиральные машины, холодильники, насосы и пылесосы.
Давайте начнем с рассмотрения общего плана простого двухполюсного электродвигателя постоянного тока. Простой мотор состоит из шести частей:
• Арматура или ротор
• Коллекторные
• Кисти
• мост
• Полевой магнит
• Источник питания постоянного тока какой-то
Электродвигатель — все о магнитах и магнетизме: двигатель использует магниты, чтобы создать движение. Если вы когда-либо играли с магнитами, вы знаете о фундаментальном законе всех магнитов: противоположности привлекают и любят отталкивать. Таким образом, если у вас есть два стержневых магнита с концами, помеченными как «север» и «юг», то северный конец одного магнита притянет южный конец другого.С другой стороны, северный конец одного магнита будет отталкивать северный конец другого (и аналогично юг будет отталкивать юг). Внутри электродвигателя эти силы притяжения и отталкивания создают вращательное движение. [1]
Чтобы понять, как работают электродвигатели, нужно понять, как работают электромагниты. Электромагнит является основой электромотора.
Электродвигатели классифицируются по плате на две различные категории, то есть постоянный ток (постоянный ток) и переменный ток (переменный ток).В этих категориях есть множество типов, каждый из которых предлагает уникальные способности, которые хорошо подходят для наилучшего применения.
В 1821 году Майкл Фарадей сделал первый электродвигатель. Это работало, используя силу магнетизма.
Он создал простой электромагнит, взяв гвоздь и проволоку, обмотав около 100 петель проволоки вокруг гвоздя и подключив его к батарее. При этом у него был простой электромагнит с северным и южным полюсом. В середине ногтя он проделал отверстие и вставил в него шпиндель, чтобы ноготь мог вращаться.Затем он взял магнит в форме подковы и поместил проволочный гвоздь в середину.
Он подключил провод северного полюса к отрицательному полюсу аккумулятора и провод южного полюса к положительному полюсу. Основной закон магнетизма сказал ему, что произойдет: северный конец электромагнита оттолкнет северный конец подковообразного магнита и привлечет южный полюс. То же самое произошло на другой стороне ногтя, в результате чего ноготь повернулся.
Фарадей был недоволен результатом электромотора, потому что мотор вращался только один раз.Он изменил полярность батареи, и проволочный гвоздь снова повернулся только один раз. Если бы он каждый раз менял полярность, когда северный полюс обернутого проволокой гвоздя противоположен южному полюсу магнита в форме подковы, он получал результат, который искал. Обернутый проволокой гвоздь будет поворачиваться и поворачиваться вокруг шпинделя (пока батарея не разряжена).
, Как работают электродвигатели?
-
Крис Вудфорд. Последнее обновление: 14 мая 2019 года.
Щёлкните по переключателю и получите мгновенную власть — как любили бы наши предки
электродвигатели! Вы можете найти их во всем, от
электропоезда с дистанционным управлением
автомобили — и вы можете быть удивлены, насколько они распространены. Сколько электрических
моторы есть в комнате с тобой прямо сейчас? Есть, вероятно, два
в твоем компьютере для начала, крутишь
ездить и еще один привод вентилятора охлаждения.Если
вы сидите в спальне, вы найдете моторы в фенах и многие
игрушки; в ванной они оснащены вытяжными вентиляторами и электробритвами;
на кухне моторы есть практически в каждом приборе, от стиральных и посудомоечных машин до кофемолок, микроволновых печей и электрических консервных ножей.
Электродвигатели зарекомендовали себя как одни из
изобретения всех времен. Давайте разберем некоторых и выясним, как они
работай!
Фото: даже маленькие электродвигатели на удивление тяжелые.Это потому, что они заполнены плотно намотанной медью и тяжелыми магнитами.
Это мотор от старой электрической газонокосилки. Медная вещь к
Передняя часть оси с прорезями в ней является коммутатором, который удерживает двигатель
вращается в том же направлении (как описано ниже).
Электричество, магнетизм и движение
Основная идея электродвигателя очень проста: вы включаете в него электричество с одной стороны и
ось
(металлический стержень) вращается на другом конце, давая вам возможность управлять
машина какая то.Как это работает на практике? Как именно
ваш
преобразовать электричество в движение? Чтобы найти ответ на этот вопрос, мы имеем
вернуться в прошлое почти на 200 лет.
Предположим, вы берете длину обычного провода, превращаете его в большую петлю,
и положите его между полюсами мощной, постоянной подковы
магнит.
Теперь, если вы подключите два конца провода к батарее,
провод прыгнет
вкратце. Удивительно, когда вы видите это в первый раз. Это
как волшебство! Но есть совершенно научный
объяснение.Когда
электрический ток начинает ползти по проводу, он создает
магнитное поле вокруг него. Если вы поместите провод возле постоянного
магнит, это временное магнитное поле взаимодействует с постоянным
магнитное поле. Вы узнаете, что два магнита расположены рядом друг с другом
либо привлекать, либо отталкивать. Точно так же временный магнетизм
вокруг провода притягивает или отталкивает постоянный магнетизм от
магнит, и это то, что заставляет проволоку прыгать.
Правило левой руки Флеминга
Вы можете определить направление, в котором будет прыгать провод, используя
удобная мнемоника (помощь памяти), называемая правилом левой руки Флеминга (иногда
Мотор называется правилом).
Протяните большой, первый и второй пальцы левой руки
рука, так что все три под прямым углом. Если вы указываете пальцем Секонд
в направлении течения
(который течет от положительного к
отрицательная клемма аккумулятора), и первый
палец в
направление поля (которое
течет с севера на южный полюс
магнит), твоя чёрт будет
показать направление, в котором провод
Ходы.
Это …
- Первый палец = Поле
- SeCond finger = Текущий
- ThuMb = движение
Быстрое слово о текущем
Если я вас смущаю, говоря, что ток течет от положительного к отрицательному,
это просто случается историческое соглашение.Такие люди, как Бенджамин Франклин, который помог выяснить
тайна электричества еще в 18 веке, полагал, что это был поток положительных зарядов,
так что оно перешло от положительного к отрицательному. Мы называем эту идею обычным током
и до сих пор его используют в таких вещах, как правило левой руки Флеминга. Теперь у нас есть лучшие идеи о том, как
электричество работает, мы склонны говорить о токе как о потоке электронов, от отрицательного к положительному, в направлении , противоположном направлению к обычному току.Когда вы пытаетесь выяснить вращение двигателя или генератора,
Обязательно помните, что ток означает условный ток , а не поток электронов.
Как работает электродвигатель — теоретически
Фото: электрика ремонтирует электродвигатель
на борту авианосца.
Блестящий металл, который он использует, может выглядеть как золото,
но на самом деле это медь,
хороший проводник, который намного дешевле. Фото Джейсона Якобовица любезно предоставлено ВМС США.
Связь между электричеством, магнетизмом и движением была изначально
обнаружен в 1820 году французским физиком Андре-Мари
Ампер
(1775–1867), и это основная наука об электромоторе.Но если
мы хотим превратить это удивительное научное открытие в более практичное
немного технологий для питания наших электрических косилок и зубных щеток, мы должны сделать это немного дальше. Изобретателями, которые это сделали, были англичане Майкл Фарадей (1791–1867)
и Уильям Стерджен (1783–1850) и американец
Джозеф Генри (1797–1878). Вот как они
достиг их блестящего изобретения.
Предположим, что мы сгибаем наш провод в квадратную U-образную петлю, так что есть
фактически
два параллельных провода, проходящие через магнитное поле.Один из них
отнимает у нас электрический ток через провод, а другой
один возвращает ток снова. Потому что ток течет в
В противоположных направлениях в проводах левое правило Флеминга говорит нам
два провода будут двигаться в противоположных направлениях. Другими словами, когда мы
включите электричество, один из проводов будет двигаться вверх и
другой будет двигаться вниз.
Если бы катушка проволоки могла продолжать движение вот так, она бы вращалась
постоянно — и мы были бы на пути к созданию электрического
двигатель.Но это не может произойти с нашей нынешней установкой: провода будут
быстро запутаться. Не только это, но если бы катушка могла вращаться далеко
достаточно, что-то еще случится. Как только катушка достигла вертикали
положение, оно перевернется, поэтому электрический ток
течь через него в обратном направлении. Теперь силы на каждом
сторона катушки будет обратная. Вместо того, чтобы постоянно вращаться в
в том же направлении, он будет двигаться в том направлении, в котором он только что пришел!
Представьте себе электричку с таким мотором:
перетасовывать назад и вперед на месте, даже не собираясь
везде.
Как работает электродвигатель — на практике
Есть два способа преодолеть эту проблему. Одним из них является использование своего рода
электрический ток, который периодически меняет направление, которое известно
в качестве переменного тока (переменного тока).
В виде маленьких, с батарейным питанием
моторы, которые мы используем по дому, лучшее решение — добавить компонент
называется коммутатором к
концы катушки. (Не беспокойтесь о бессмысленных технических
Название: это слегка старомодное слово «коммутация» немного похоже на
слово «коммутировать».Это просто означает, чтобы измениться вперед и назад в том же
путь, которым добираются, означает путешествовать назад и вперед.) В его самой простой форме
коммутатор представляет собой металлическое кольцо, разделенное на две отдельные половины и
его работа заключается в том, чтобы инвертировать электрический ток в катушке каждый раз, когда
Катушка вращается через пол оборота. Один конец катушки прикреплен к
каждая половина коммутатора. Электрический ток от батареи
подключается к электрическим клеммам двигателя.
Они подают электроэнергию в коммутатор через пару свободных
разъемы, называемые кистями,
сделали
либо из кусочков графита (мягкий карбон, похожий на карандаш
«свинец») или тонкие отрезки пружинящего металла,
который (как
название подсказывает) «кисть» против коммутатора.С
коммутатор, когда электричество течет по цепи,
Катушка будет постоянно вращаться в одном и том же направлении.
Работа: упрощенная схема деталей в электрическом
двигатель. Мультработа: как это работает на практике. Обратите внимание, как коммутатор меняет ток каждый раз, когда катушка поворачивается
наполовину. Это означает, что сила на каждой стороне катушки всегда
толкает в том же направлении, что удерживает катушку, вращающуюся по часовой стрелке.
Простой экспериментальный двигатель, подобный этому, не способен
большая силаМы можем увеличить поворотную силу (или крутящий момент)
что
Мотор можно создать тремя способами: либо мы можем иметь больше
мощный постоянный магнит, или мы можем увеличить электрический ток
течет через провод, или мы можем сделать катушку, чтобы она имела много
«витки» (петли) очень тонкой проволоки вместо одного «витка» толстой проволоки.
На практике двигатель также имеет постоянный магнит, изогнутый в
круглая форма, так что он почти касается катушки проволоки, которая вращается
внутри него. Чем ближе магнит и катушка, тем
больше сила, которую может создать мотор.
Несмотря на то, что мы описали несколько различных частей, вы можете представить себе, что двигатель состоит из двух основных компонентов:
- По краю корпуса двигателя находится постоянный магнит (или магниты), который остается статичным, поэтому он называется статором двигателя.
- Внутри статора есть катушка, установленная на оси, которая вращается с большой скоростью — и это называется ротором. Ротор также включает в себя коммутатор.
Универсальные моторы
Подобные двигатели постоянного тока отлично подходят для игрушек с батарейным питанием (таких как модельные поезда, радиоуправляемые вагоны или электробритвы), но вы не найдете их во многих бытовых приборах.Небольшие бытовые приборы (такие как кофемолки или электрические блендеры), как правило, используют так называемые универсальные двигатели , которые могут работать от переменного или постоянного тока. В отличие от простого двигателя постоянного тока, универсальный двигатель имеет электромагнит вместо постоянного магнита, и он получает энергию от источника постоянного или переменного тока, который вы вводите:
- При подаче постоянного тока электромагнит работает как обычный постоянный магнит и создает магнитное поле, которое всегда направлено в одном направлении.Коммутатор меняет ток катушки каждый раз, когда катушка переворачивается, как в обычном двигателе постоянного тока, поэтому катушка всегда вращается в одном и том же направлении.
- Однако, когда вы подаете переменный ток, ток, протекающий через электромагнит, и ток, протекающий через катушку , и , инвертируются точно в шаге, поэтому сила на катушке всегда одинакова, и двигатель всегда вращается либо по часовой стрелке или против часовой стрелки. А как насчет коммутатора? Частота тока изменяется намного быстрее, чем вращается двигатель, и, поскольку поле и ток всегда находятся в шаге, фактически не имеет значения, в каком положении находится коммутатор в любой данный момент.
Анимация: как работает универсальный двигатель: источник питания питает как магнитное поле, так и вращающуюся катушку. С источником постоянного тока универсальный двигатель работает так же, как обычный двигатель постоянного тока, как указано выше. При использовании источника переменного тока магнитное поле и ток катушки меняют направление каждый раз, когда ток питания меняется на противоположный. Это означает, что сила на катушке всегда направлена одинаково.
Фото: внутри типичного универсального мотора: основные части внутри мотора среднего размера от кофемолки, которая может работать от постоянного или переменного тока.Серый электромагнит по краю — это статор (статическая часть), который питается от катушек оранжевого цвета. Обратите внимание также на щели в коммутаторе и угольные щетки, толкающие его, которые обеспечивают питание ротора (вращающейся части). Асинхронные двигатели в таких вещах, как электрические железнодорожные поезда, во много раз больше и мощнее этого, и всегда работают с использованием переменного тока высокого напряжения, а не постоянного тока низкого напряжения или бытового переменного тока умеренно низкого напряжения. который питает универсальные двигатели.
Другие виды электродвигателей
В простых двигателях постоянного тока и универсальных двигателях ротор вращается внутри статора. Ротор представляет собой катушку, соединенную с источником электропитания, а статор представляет собой постоянный магнит или электромагнит. Большие двигатели переменного тока (используемые в таких вещах, как заводские машины) работают несколько иначе: они пропускают переменный ток через противоположные пары магнитов, создавая вращающееся магнитное поле, которое «индуцирует» (создает) магнитное поле в роторе двигателя, вызывая это крутиться.Подробнее об этом вы можете прочитать в нашей статье об асинхронных двигателях переменного тока. Если вы возьмете один из этих асинхронных двигателей и «развернете» его, чтобы статор был эффективно разложен на длинной непрерывной гусенице, ротор мог катиться вдоль него по прямой линии. Этот оригинальный дизайн известен как линейный двигатель, и вы найдете его в таких вещах, как заводские машины и плавучие железные дороги «маглев».
Другой интересный дизайн — бесщеточный двигатель постоянного тока (BLDC). Статор и ротор эффективно меняются друг от друга, при этом в центре статично размещаются несколько железных катушек, вокруг них вращается постоянный магнит, а коммутатор и щетки заменяются электронной схемой.Вы можете прочитать больше в нашей основной статье на моторы эпицентра деятельности.
Шаговые двигатели, которые поворачиваются на точно контролируемые углы, представляют собой разновидность бесщеточных двигателей постоянного тока.
-
,
Электродвигатель преобразует электрическую энергию в механическое движение. Динамо или электрический генератор делает обратное: он превращает механическое движение в электрическую энергию. Большинство электродвигателей работают с использованием силы магнетизма. Электростатические двигатели также были использованы.
Машины с электродвигателями включают в себя: вентиляторы, стиральные машины, холодильники, насосы и пылесосы.
Давайте начнем с рассмотрения общего плана простого двухполюсного электродвигателя постоянного тока. Простой мотор состоит из шести частей: • Арматура или ротор • Коллекторные • Кисти • мост • Полевой магнит • Источник питания постоянного тока какой-то Электродвигатель — все о магнитах и магнетизме: двигатель использует магниты, чтобы создать движение. Если вы когда-либо играли с магнитами, вы знаете о фундаментальном законе всех магнитов: противоположности привлекают и любят отталкивать. Таким образом, если у вас есть два стержневых магнита с концами, помеченными как «север» и «юг», то северный конец одного магнита притянет южный конец другого.С другой стороны, северный конец одного магнита будет отталкивать северный конец другого (и аналогично юг будет отталкивать юг). Внутри электродвигателя эти силы притяжения и отталкивания создают вращательное движение. [1]
Чтобы понять, как работают электродвигатели, нужно понять, как работают электромагниты. Электромагнит является основой электромотора.
Электродвигатели классифицируются по плате на две различные категории, то есть постоянный ток (постоянный ток) и переменный ток (переменный ток).В этих категориях есть множество типов, каждый из которых предлагает уникальные способности, которые хорошо подходят для наилучшего применения.
В 1821 году Майкл Фарадей сделал первый электродвигатель. Это работало, используя силу магнетизма.
Он создал простой электромагнит, взяв гвоздь и проволоку, обмотав около 100 петель проволоки вокруг гвоздя и подключив его к батарее. При этом у него был простой электромагнит с северным и южным полюсом. В середине ногтя он проделал отверстие и вставил в него шпиндель, чтобы ноготь мог вращаться.Затем он взял магнит в форме подковы и поместил проволочный гвоздь в середину.
Он подключил провод северного полюса к отрицательному полюсу аккумулятора и провод южного полюса к положительному полюсу. Основной закон магнетизма сказал ему, что произойдет: северный конец электромагнита оттолкнет северный конец подковообразного магнита и привлечет южный полюс. То же самое произошло на другой стороне ногтя, в результате чего ноготь повернулся.
Фарадей был недоволен результатом электромотора, потому что мотор вращался только один раз.Он изменил полярность батареи, и проволочный гвоздь снова повернулся только один раз. Если бы он каждый раз менял полярность, когда северный полюс обернутого проволокой гвоздя противоположен южному полюсу магнита в форме подковы, он получал результат, который искал. Обернутый проволокой гвоздь будет поворачиваться и поворачиваться вокруг шпинделя (пока батарея не разряжена).
,Как работают электродвигатели?
Крис Вудфорд. Последнее обновление: 14 мая 2019 года.
Щёлкните по переключателю и получите мгновенную власть — как любили бы наши предки электродвигатели! Вы можете найти их во всем, от электропоезда с дистанционным управлением автомобили — и вы можете быть удивлены, насколько они распространены. Сколько электрических моторы есть в комнате с тобой прямо сейчас? Есть, вероятно, два в твоем компьютере для начала, крутишь ездить и еще один привод вентилятора охлаждения.Если вы сидите в спальне, вы найдете моторы в фенах и многие игрушки; в ванной они оснащены вытяжными вентиляторами и электробритвами; на кухне моторы есть практически в каждом приборе, от стиральных и посудомоечных машин до кофемолок, микроволновых печей и электрических консервных ножей. Электродвигатели зарекомендовали себя как одни из изобретения всех времен. Давайте разберем некоторых и выясним, как они работай!
Фото: даже маленькие электродвигатели на удивление тяжелые.Это потому, что они заполнены плотно намотанной медью и тяжелыми магнитами. Это мотор от старой электрической газонокосилки. Медная вещь к Передняя часть оси с прорезями в ней является коммутатором, который удерживает двигатель вращается в том же направлении (как описано ниже).
Электричество, магнетизм и движение
Основная идея электродвигателя очень проста: вы включаете в него электричество с одной стороны и ось (металлический стержень) вращается на другом конце, давая вам возможность управлять машина какая то.Как это работает на практике? Как именно ваш преобразовать электричество в движение? Чтобы найти ответ на этот вопрос, мы имеем вернуться в прошлое почти на 200 лет.
Предположим, вы берете длину обычного провода, превращаете его в большую петлю, и положите его между полюсами мощной, постоянной подковы магнит. Теперь, если вы подключите два конца провода к батарее, провод прыгнет вкратце. Удивительно, когда вы видите это в первый раз. Это как волшебство! Но есть совершенно научный объяснение.Когда электрический ток начинает ползти по проводу, он создает магнитное поле вокруг него. Если вы поместите провод возле постоянного магнит, это временное магнитное поле взаимодействует с постоянным магнитное поле. Вы узнаете, что два магнита расположены рядом друг с другом либо привлекать, либо отталкивать. Точно так же временный магнетизм вокруг провода притягивает или отталкивает постоянный магнетизм от магнит, и это то, что заставляет проволоку прыгать.
Правило левой руки Флеминга
Вы можете определить направление, в котором будет прыгать провод, используя удобная мнемоника (помощь памяти), называемая правилом левой руки Флеминга (иногда Мотор называется правилом).
Протяните большой, первый и второй пальцы левой руки
рука, так что все три под прямым углом. Если вы указываете пальцем Секонд
в направлении течения
(который течет от положительного к
отрицательная клемма аккумулятора), и первый
палец в
направление поля (которое
течет с севера на южный полюс
магнит), твоя чёрт будет
показать направление, в котором провод
Ходы.
Это …
- Первый палец = Поле
- SeCond finger = Текущий
- ThuMb = движение
Быстрое слово о текущем
Если я вас смущаю, говоря, что ток течет от положительного к отрицательному, это просто случается историческое соглашение.Такие люди, как Бенджамин Франклин, который помог выяснить тайна электричества еще в 18 веке, полагал, что это был поток положительных зарядов, так что оно перешло от положительного к отрицательному. Мы называем эту идею обычным током и до сих пор его используют в таких вещах, как правило левой руки Флеминга. Теперь у нас есть лучшие идеи о том, как электричество работает, мы склонны говорить о токе как о потоке электронов, от отрицательного к положительному, в направлении , противоположном направлению к обычному току.Когда вы пытаетесь выяснить вращение двигателя или генератора, Обязательно помните, что ток означает условный ток , а не поток электронов.
Как работает электродвигатель — теоретически
Фото: электрика ремонтирует электродвигатель на борту авианосца. Блестящий металл, который он использует, может выглядеть как золото, но на самом деле это медь, хороший проводник, который намного дешевле. Фото Джейсона Якобовица любезно предоставлено ВМС США.
Связь между электричеством, магнетизмом и движением была изначально обнаружен в 1820 году французским физиком Андре-Мари Ампер (1775–1867), и это основная наука об электромоторе.Но если мы хотим превратить это удивительное научное открытие в более практичное немного технологий для питания наших электрических косилок и зубных щеток, мы должны сделать это немного дальше. Изобретателями, которые это сделали, были англичане Майкл Фарадей (1791–1867) и Уильям Стерджен (1783–1850) и американец Джозеф Генри (1797–1878). Вот как они достиг их блестящего изобретения.
Предположим, что мы сгибаем наш провод в квадратную U-образную петлю, так что есть фактически два параллельных провода, проходящие через магнитное поле.Один из них отнимает у нас электрический ток через провод, а другой один возвращает ток снова. Потому что ток течет в В противоположных направлениях в проводах левое правило Флеминга говорит нам два провода будут двигаться в противоположных направлениях. Другими словами, когда мы включите электричество, один из проводов будет двигаться вверх и другой будет двигаться вниз.
Если бы катушка проволоки могла продолжать движение вот так, она бы вращалась постоянно — и мы были бы на пути к созданию электрического двигатель.Но это не может произойти с нашей нынешней установкой: провода будут быстро запутаться. Не только это, но если бы катушка могла вращаться далеко достаточно, что-то еще случится. Как только катушка достигла вертикали положение, оно перевернется, поэтому электрический ток течь через него в обратном направлении. Теперь силы на каждом сторона катушки будет обратная. Вместо того, чтобы постоянно вращаться в в том же направлении, он будет двигаться в том направлении, в котором он только что пришел! Представьте себе электричку с таким мотором: перетасовывать назад и вперед на месте, даже не собираясь везде.
Как работает электродвигатель — на практике
Есть два способа преодолеть эту проблему. Одним из них является использование своего рода электрический ток, который периодически меняет направление, которое известно в качестве переменного тока (переменного тока). В виде маленьких, с батарейным питанием моторы, которые мы используем по дому, лучшее решение — добавить компонент называется коммутатором к концы катушки. (Не беспокойтесь о бессмысленных технических Название: это слегка старомодное слово «коммутация» немного похоже на слово «коммутировать».Это просто означает, чтобы измениться вперед и назад в том же путь, которым добираются, означает путешествовать назад и вперед.) В его самой простой форме коммутатор представляет собой металлическое кольцо, разделенное на две отдельные половины и его работа заключается в том, чтобы инвертировать электрический ток в катушке каждый раз, когда Катушка вращается через пол оборота. Один конец катушки прикреплен к каждая половина коммутатора. Электрический ток от батареи подключается к электрическим клеммам двигателя. Они подают электроэнергию в коммутатор через пару свободных разъемы, называемые кистями, сделали либо из кусочков графита (мягкий карбон, похожий на карандаш «свинец») или тонкие отрезки пружинящего металла, который (как название подсказывает) «кисть» против коммутатора.С коммутатор, когда электричество течет по цепи, Катушка будет постоянно вращаться в одном и том же направлении.
Работа: упрощенная схема деталей в электрическом двигатель. Мультработа: как это работает на практике. Обратите внимание, как коммутатор меняет ток каждый раз, когда катушка поворачивается наполовину. Это означает, что сила на каждой стороне катушки всегда толкает в том же направлении, что удерживает катушку, вращающуюся по часовой стрелке.
Простой экспериментальный двигатель, подобный этому, не способен большая силаМы можем увеличить поворотную силу (или крутящий момент) что Мотор можно создать тремя способами: либо мы можем иметь больше мощный постоянный магнит, или мы можем увеличить электрический ток течет через провод, или мы можем сделать катушку, чтобы она имела много «витки» (петли) очень тонкой проволоки вместо одного «витка» толстой проволоки. На практике двигатель также имеет постоянный магнит, изогнутый в круглая форма, так что он почти касается катушки проволоки, которая вращается внутри него. Чем ближе магнит и катушка, тем больше сила, которую может создать мотор.
Несмотря на то, что мы описали несколько различных частей, вы можете представить себе, что двигатель состоит из двух основных компонентов:
- По краю корпуса двигателя находится постоянный магнит (или магниты), который остается статичным, поэтому он называется статором двигателя.
- Внутри статора есть катушка, установленная на оси, которая вращается с большой скоростью — и это называется ротором. Ротор также включает в себя коммутатор.
Универсальные моторы
Подобные двигатели постоянного токаотлично подходят для игрушек с батарейным питанием (таких как модельные поезда, радиоуправляемые вагоны или электробритвы), но вы не найдете их во многих бытовых приборах.Небольшие бытовые приборы (такие как кофемолки или электрические блендеры), как правило, используют так называемые универсальные двигатели , которые могут работать от переменного или постоянного тока. В отличие от простого двигателя постоянного тока, универсальный двигатель имеет электромагнит вместо постоянного магнита, и он получает энергию от источника постоянного или переменного тока, который вы вводите:
- При подаче постоянного тока электромагнит работает как обычный постоянный магнит и создает магнитное поле, которое всегда направлено в одном направлении.Коммутатор меняет ток катушки каждый раз, когда катушка переворачивается, как в обычном двигателе постоянного тока, поэтому катушка всегда вращается в одном и том же направлении.
- Однако, когда вы подаете переменный ток, ток, протекающий через электромагнит, и ток, протекающий через катушку , и , инвертируются точно в шаге, поэтому сила на катушке всегда одинакова, и двигатель всегда вращается либо по часовой стрелке или против часовой стрелки. А как насчет коммутатора? Частота тока изменяется намного быстрее, чем вращается двигатель, и, поскольку поле и ток всегда находятся в шаге, фактически не имеет значения, в каком положении находится коммутатор в любой данный момент.
Анимация: как работает универсальный двигатель: источник питания питает как магнитное поле, так и вращающуюся катушку. С источником постоянного тока универсальный двигатель работает так же, как обычный двигатель постоянного тока, как указано выше. При использовании источника переменного тока магнитное поле и ток катушки меняют направление каждый раз, когда ток питания меняется на противоположный. Это означает, что сила на катушке всегда направлена одинаково.
Фото: внутри типичного универсального мотора: основные части внутри мотора среднего размера от кофемолки, которая может работать от постоянного или переменного тока.Серый электромагнит по краю — это статор (статическая часть), который питается от катушек оранжевого цвета. Обратите внимание также на щели в коммутаторе и угольные щетки, толкающие его, которые обеспечивают питание ротора (вращающейся части). Асинхронные двигатели в таких вещах, как электрические железнодорожные поезда, во много раз больше и мощнее этого, и всегда работают с использованием переменного тока высокого напряжения, а не постоянного тока низкого напряжения или бытового переменного тока умеренно низкого напряжения. который питает универсальные двигатели.
Другие виды электродвигателей
В простых двигателях постоянного тока и универсальных двигателях ротор вращается внутри статора. Ротор представляет собой катушку, соединенную с источником электропитания, а статор представляет собой постоянный магнит или электромагнит. Большие двигатели переменного тока (используемые в таких вещах, как заводские машины) работают несколько иначе: они пропускают переменный ток через противоположные пары магнитов, создавая вращающееся магнитное поле, которое «индуцирует» (создает) магнитное поле в роторе двигателя, вызывая это крутиться.Подробнее об этом вы можете прочитать в нашей статье об асинхронных двигателях переменного тока. Если вы возьмете один из этих асинхронных двигателей и «развернете» его, чтобы статор был эффективно разложен на длинной непрерывной гусенице, ротор мог катиться вдоль него по прямой линии. Этот оригинальный дизайн известен как линейный двигатель, и вы найдете его в таких вещах, как заводские машины и плавучие железные дороги «маглев».
Другой интересный дизайн — бесщеточный двигатель постоянного тока (BLDC). Статор и ротор эффективно меняются друг от друга, при этом в центре статично размещаются несколько железных катушек, вокруг них вращается постоянный магнит, а коммутатор и щетки заменяются электронной схемой.Вы можете прочитать больше в нашей основной статье на моторы эпицентра деятельности. Шаговые двигатели, которые поворачиваются на точно контролируемые углы, представляют собой разновидность бесщеточных двигателей постоянного тока.
Похожие записи
