Что такое цифровой автомат. Как спроектировать цифровой автомат. Какие этапы включает синтез логической схемы цифрового автомата. Как построить таблицу переходов и граф состояний цифрового автомата. Где применяются цифровые автоматы.
Что такое цифровой автомат и его основные компоненты
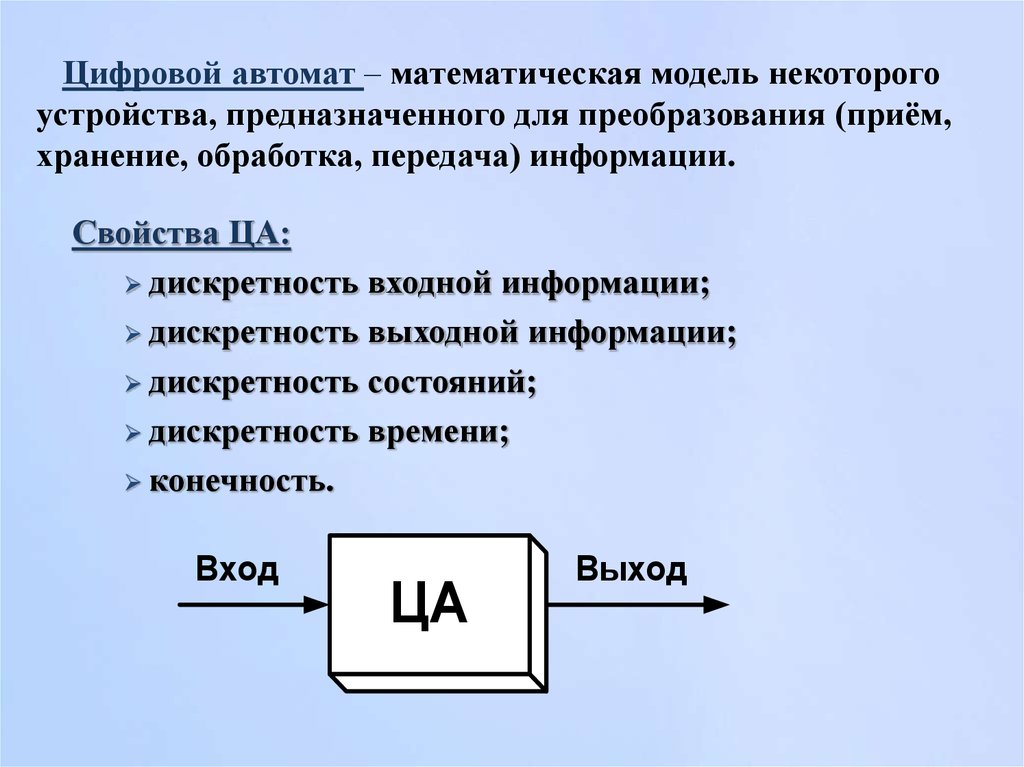
Цифровой автомат — это последовательностное логическое устройство, состояние которого в любой момент времени определяется его предыдущим состоянием и входными сигналами. Основные компоненты цифрового автомата включают:
- Триггерную подсистему (память состояний)
- Комбинационную логику (определяет переходы между состояниями)
- Входные сигналы
- Выходные сигналы
- Сигнал синхронизации
Состояние цифрового автомата характеризуется N-разрядным двоичным словом, где N — число триггеров. Всего автомат может иметь 2^N различных состояний.
Этапы проектирования цифрового автомата
Проектирование цифрового автомата включает следующие основные этапы:
- Определение требуемого числа состояний и объема памяти
- Составление таблицы переходов или графа состояний
- Выбор типа триггеров
- Составление расширенной таблицы переходов
- Минимизация функций возбуждения триггеров
- Построение логической схемы автомата
Рассмотрим каждый из этих этапов подробнее.

Определение числа состояний и объема памяти автомата
Чтобы определить необходимое число триггеров N для реализации автомата, используется формула:
N ≥ log2M
Где M — требуемое число состояний автомата. N округляется до ближайшего большего целого.
Число состояний M определяется из анализа алгоритма работы устройства. Например, для автомата управления лифтом на 6 человек потребуется 7 состояний (от 0 до 6 пассажиров). Следовательно:
N ≥ log2 7 ≈ 2.8
Округляя до целого, получаем N = 3 триггера.
Составление таблицы переходов и графа состояний
Таблица переходов и граф состояний — это способы формального описания алгоритма работы цифрового автомата.
Таблица переходов содержит:
- Текущее состояние
- Входной сигнал
- Следующее состояние
- Выходной сигнал
Граф состояний представляет собой графическое изображение переходов между состояниями автомата. Состояния обозначаются вершинами, а переходы — направленными ребрами.
Выбор типа триггеров для реализации автомата
При выборе типа триггеров для цифрового автомата обычно рекомендуется использовать:

- JK-триггеры
- RS-триггеры
- T-триггеры
Эти типы триггеров позволяют получить более простую структуру автомата за счет большего числа неопределенных состояний во входных сигналах.
Составление расширенной таблицы переходов
Расширенная таблица переходов дополняет обычную таблицу следующими столбцами:- Текущее состояние триггеров (Qn)
- Следующее состояние триггеров (Qn+1)
- Сигналы на информационных входах триггеров (например, J и K для JK-триггеров)
- Выходные сигналы автомата
Эта таблица позволяет определить функции возбуждения триггеров и выходные функции автомата.
Минимизация функций и построение логической схемы
На основе расширенной таблицы переходов выполняется минимизация функций возбуждения триггеров и выходных функций автомата. Для этого могут применяться:
- Карты Карно
- Метод Квайна-Мак-Класки
- Другие методы минимизации булевых функций
После минимизации строится логическая схема автомата, включающая триггеры и комбинационную логику.
Применение цифровых автоматов
Цифровые автоматы широко применяются в различных областях цифровой техники и программирования:

- Управляющие устройства (например, контроллеры лифтов, светофоров)
- Распознавание последовательностей в обработке сигналов
- Синтаксические анализаторы компиляторов
- Протоколы передачи данных
- Игровые алгоритмы
Понимание принципов работы и проектирования цифровых автоматов важно для разработки эффективных цифровых систем.
Оптимизация цифровых автоматов
При проектировании цифровых автоматов часто возникает необходимость их оптимизации. Основные направления оптимизации включают:
- Минимизацию числа состояний
- Упрощение логических функций
- Уменьшение аппаратных затрат
- Повышение быстродействия
Как можно оптимизировать цифровой автомат? Рассмотрим некоторые методы:
- Исключение избыточных состояний. Анализ графа состояний позволяет выявить и удалить состояния, не влияющие на работу автомата.
- Кодирование состояний. Правильный выбор кодов состояний может существенно упростить логические функции автомата.
- Декомпозиция автомата. Разбиение сложного автомата на несколько более простых может упростить его реализацию.
- Использование алгоритмических методов синтеза. Применение специальных алгоритмов позволяет автоматизировать процесс оптимизации.
Оптимизация цифровых автоматов — сложная задача, требующая глубокого понимания теории автоматов и методов логического синтеза.

Верификация цифровых автоматов
Верификация — важный этап проектирования цифровых автоматов, обеспечивающий их корректную работу. Она включает:
- Проверку полноты описания автомата
- Анализ достижимости всех состояний
- Проверку отсутствия противоречий в таблице переходов
- Тестирование на различных входных последовательностях
Какие методы применяются для верификации цифровых автоматов? Основные подходы включают:
- Формальные методы верификации, основанные на математическом доказательстве корректности автомата.
- Имитационное моделирование, позволяющее проверить работу автомата на большом наборе тестовых векторов.
- Проверка эквивалентности автомата исходной спецификации.
- Анализ временных характеристик для проверки быстродействия автомата.
Тщательная верификация позволяет выявить и устранить ошибки в проекте цифрового автомата до его физической реализации.
Оптимизация цифрового автомата (FSM) / Хабр
О чём пост?Данный материал представляет краткое описание проблемы в теории цифровых автоматов и объясняет один из способов решения данной проблемы, который был найден при попытке автоматизации процесса построения цифрововых автоматов.
Введение
Автомат – система механизмов, устройств, в которой полностью автоматизированы процессы получения, преобразования, передачи энергии, материалов, информации.
Термин <<автомат>> в основном используется в двух аспектах:
техническом;
математическом.
При математическом подходе под автоматом понимается математическая модель, у которой должны быть входы, внутренние состояния и выходы. Детали структуры устройства не учитываюся и не рассматриваются.
В техническом подходе под автоматом понимается вполне реальное устройство, например, телефонный автомат, торговый автомат и т. д. В данном случае, естественно, известными являются детали внутреннего строения устройства.
С точки зрения сигналов цифровой автомат (ЦА) – система, которая может принимать входные сигналы, под их воздействием переходить из одного состояния в другое, сохранять его до прихода следующего входного сигнала, выдавать выходные сигналы.
В данной работе рассматриваются цифровые сигналы и двоичная логика на базе логических элементов.
Структурно-функциональная схема цифрового конечного автоматаПрименение
Теория автоматов лежит в основе всех цифровых технологий и программного обеспечения. Часть математического аппарата теории автоматов напрямую применяется при разработке лексических и синтаксических анализаторов для формальных языков, в том числе языков программирования, а также при построении компиляторов и разработке самих языков программирования, описания аппаратуры, а также разметки.
Другое важнейшее применение теории автоматов — математически строгое нахождение разрешимости и сложности задач.
Автоматы Мура и Мили широко применяются при проектировании цифровых устройств на основе программируемых логических интегральных схем (ПЛИС). Наличие минимальной выходной задержки, связанной с переключением выходного регистра, отсутствие нестабильности переходного процесса на выходе автомата, отсутствие сквозного распространения сигнала через комбинационную схему от входа до выхода автомата, простота описания на языках описания аппаратуры делает автомат Мура практически незаменимым. Также автоматы Мура и взаимодействующие автоматы Мили используются в генетическом программировании.
Наличие минимальной выходной задержки, связанной с переключением выходного регистра, отсутствие нестабильности переходного процесса на выходе автомата, отсутствие сквозного распространения сигнала через комбинационную схему от входа до выхода автомата, простота описания на языках описания аппаратуры делает автомат Мура практически незаменимым. Также автоматы Мура и взаимодействующие автоматы Мили используются в генетическом программировании.
Описание проблемы
Построение цифрового автомата — довольно трудоёмкий процесс. Можно выделить следующие этапы разработки ЦА:
1) Очень часто разработка ЦА начинается с реализации графа, который отражает закладываемую логику в простом и понятном для человека виде.
2) Оптимизация графа — с этой задачей человек может справиться довольно быстро.
3) Определение разрядности памяти. Минимальное число триггеров можно вычислить по формуле:
где, S — это число состояний, ceil — функция приведения значения до ближайшего целого числа, которое не меньше исходного.
4) Присвоение состояниям кодов. Алгоритма для правильного задания кодов для состояний нет. Именно от этого зависит сложность уравнений, которые мы получим для входов триггеров и количество элементов необходимых для сборки схемы.
5) Составление таблицы состояний-переходов.
6) Составление булевых арифметических уравнений для входов триггеров. Карты Карно составляются по таблице состояний-переходов, уравнения минимизируются.
7) Преобразование уравнений для согласования с элементной базой.
8) Разработка электрической схемы.
Основная проблема — отсутствие алгоритма для задания кодов состояниям автомата таким образом, чтобы уравнения для входов триггеров были как можно проще.
Решение
Была разработана программа для построения цифровых автоматов. На вход программа принимает граф. В программе граф представляется в наборе вершин и рёбер(вершина, входной сигнал, вершина для перехода). Итерируясь по рёбрам составляются таблицы истинности для каждого разряда в СКНФ и СДНФ.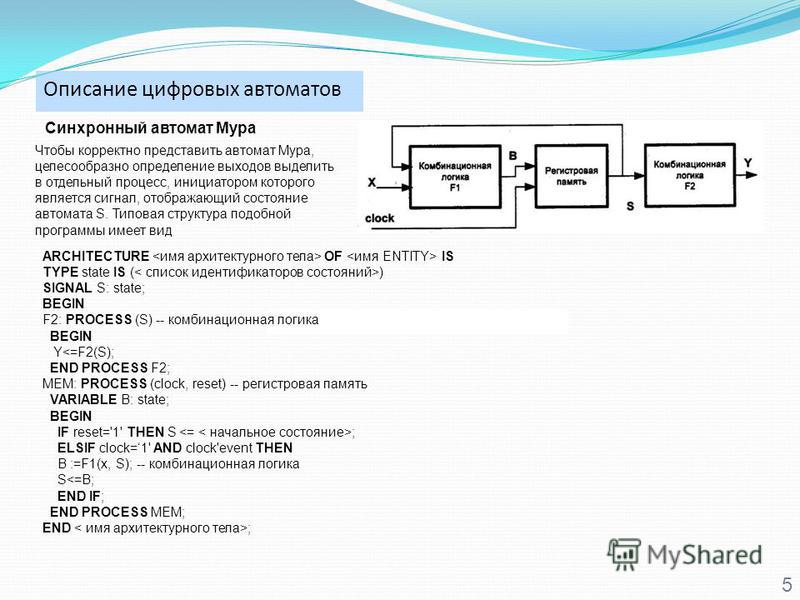 Методом Куайна-Мак-Класки минимизируются обе формы уравнений. Для каждого разряда выбирается выражение с минимальным количеством логических операций <<И>>, <<ИЛИ>>. Общее количество этих операций является критерием качества данной кодировки.
Методом Куайна-Мак-Класки минимизируются обе формы уравнений. Для каждого разряда выбирается выражение с минимальным количеством логических операций <<И>>, <<ИЛИ>>. Общее количество этих операций является критерием качества данной кодировки.
Количество возможных вариантов задания состояний можно рассчитать зная разрядность памяти(M) и количество состояний(S).
Количество кодов:
Количество вариантов выборки(V) нужного количества состояний(S) из всего количества кодов(C), формула из комбинаторики:
Количество возможных вариантов задания состояний(A) равно:
Если перебирать все варианты и потом отобрать лучший, то в зависимости от графа программа может исполняться слишком долго. Такой вариант подойдёт для автоматов с небольшим числом вариантов задания кодов состояний.
Для автоматов с большим числом возможных вариантов задания состояний был разработан генетический алгоритм перебора вариантов состояний.
Схема генетического алгоритмаРезультаты
Для исследования был спроектирован автомат с числом возможных вариантов задания состояний равным 6720. Для каждого варианта было рассчитано количество необходимых элементов для реализации.
Для каждого варианта было рассчитано количество необходимых элементов для реализации.
Данный ЦА описывает поведение пчелы (для простоты восприятия), входной сигнал представляет 0(всё спокойно) или 1(пчела видит шершня).
Граф цифрового автомата, описывающий поведение пчелыОписание ЦА:
Количество состояний: 5
Разрядность памяти: ceil(log2(5)) = 3
Разрядность входного сигнала: 1
Пример расчёта числа всех возможных вариантов построения автомата:
Для любой выборки(V) нашлось не менее X(X<S!) перестановок с наилучшим исходом. Наилучший исход — исход с минимальным числом элементов необходимых для реализации данного автомата. Для поиска способа кодирования c наилучшим исходом достаточно перебрать S! вариантов.
Анализ показал, что наибольшая вероятность встретить автомат с наилучшим исходом — если количество 0 и 1 в кодах состояний будет равнозначным.
Для сложных автоматов, где перебор занимает много времени, эффективным решением будет применить генетический алгоритм, он не обязательно найдёт наилучший исход, но позволит быстро найти решение близкое к нему.
Цифровые автоматы – общие сведения
Похожие презентации:
3D печать и 3D принтер
Видеокарта. Виды видеокарт
Анализ компании Apple
Трансформаторы тока и напряжения
Транзисторы
Устройство стиральной машины LG. Электрика
Конструкции распределительных устройств. (Лекция 15)
Электробезопасность. Правила технической эксплуатации электроустановок
Магнитные пускатели и контакторы
Работа на радиостанциях КВ и УКВ диапазонов. Антенны военных радиостанций. (Тема 5.1)
1. Цифровые автоматы – общие сведения
Автомат — математическая модель дискретного устройстваАвтомат описывается набором множеств:
A = {a1 … aN} — множество значений состояний устройства
Z = {z1 … zN} — множество входных управляющих сигналов
W = {w1 … wN}— множество выходных сигналов
δ — функция переходов от текущего состояния аn в следующее состояние an+1
λ — функция зависимости выходов от значений аn и zn
а1 — начальное состояние автомата
Автомат Мили
Автомат Мура
an+1 = δ(an, zn)
an+1 = δ(an, zn)
wn = λ(an, zn)
wn = λ(an)
1
2.
 Цифровые автоматы – структурные схемыАвтомат Мили
Цифровые автоматы – структурные схемыАвтомат Милиan+1 = δ(an, zn)
wn = λ(an, zn)
2
Автомат Мура
an+1 = δ(an, zn)
wn = λ(an)
zn
zn
δ
δ
an+1
an+1
A
an
λ
wn
A
an
λ
wn
Классификация триггеров
•1
•2
•3
сделать в 2018-2019у.г.
3
4. Базовые триггерные схемы
RS бистабильная ячейка; RSC триггер; D-защелка; D-защелка на ПК; JK и Т триггерсделать в 2018-2019у.г.
4
5. DC триггер
Словари и характеристические уравнения триггеровDC триггер
Qn+1=D
_
Qn+1=D∙C + C∙Qn
5
Дополнить
диаграммами
сигналов
сделать в 2018-2019у.г.
TV триггер
_
_
Qn+1=Qn∙V + V∙Qn
_
_ _
Qn+1=Qn∙V∙T + (V+T)∙Qn
6. DV триггер
Словари и характеристические уравнения триггеровDC триггер
Qn+1=D
_
Qn+1=D∙C + C∙Qn
6
Дополнить
диаграммами
сигналов
сделать в 2018-2019у.г.
DV триггер
_
Qn+1=D∙V + V∙Qn
_ _
Qn+1=D∙V∙C + (V+C)∙Qn
7.
 RS триггерСловари и характеристические уравнения триггеров
RS триггерСловари и характеристические уравнения триггеров7
RS триггер
_
Qn+1=S + R∙Qn
_
_ сделать в 2018-2019у.г.
Qn+1=(S+R∙Qn)C + C∙Qn
Дополнить
диаграммами
сигналов
JK триггер
_
_
Qn+1=J∙Qn + K∙Qn
_ _
_
Qn+1=(J∙Qn + K∙Qn)C + C∙Qn
8. Cхемы триггеров Триггеры типа Master-Slave
8Cхемы триггеров
Триггеры на коммутируемых ячейках
9
Cхемы триггеров
Триггеры типа Master-Slave на проходных ключах
Заменить
мультиплексором
на прох.ключах
1
0
11
Сруктурная схема автомата
Пример — двухрежимный счетчик
как автомат Мура
F
{D, V, R,S, J,K}
F
M
F
OUT=Qn
M
{D, V, R,S, J,K}
F
Qn
Q
как автомат Мили
Qn
Q
G
OUT
12. Регистры
Базовая ячейка универсального регистра(ячейка произвольного автомата с 8-ю состояниями)
12
Регистры сдвига
Shift_Righti = Qi-1 Shift_Right0 = Data_IN
Shift_Lefti = Qi+1
Shift_LeftN = Data_IN
Параллельный регистр
MUX режимов параллельной
записи и хранения
Data_Parraleli = Datai
Data_Storei = Qi
Реверсивный регистр
MUX режимов сдвига
Универсальный регистр (см.
 рисунок)
рисунок)MUX режимов сдвига, параллельной
записи и режима хранения
13. Полные счетчики – Делители частоты
АсинхронныйVi = 1
C0 = CLK
Ci = !Qi-1
Cинхронный
V0 = 1
Vi = Vi-1∙!Qi-1
Ci = CLK
13
14. Не полные счетчики с асинхронным сбросом
11
1
1
1
0
0
Асинхронный
Cинхронный
Пример: вычитающий счетчик с модулем счета 5
Установка в значение Qn+1 = 4 происходит при Q = 7
НО в жизни не все т ак прост о (см. следующий слайд)
14
1
15. Не полные счетчики с асинхронным сбросом
11
1
1
1
0
0
Асинхронный
Cинхронный
НЕ РАБОТАЕТ
РАБОТАЕТ
15
1
16. Не полные счетчики с асинхронным сбросом
11
1
RESET
0
Ожидаемый счет
4→3→2→1→0→4→…
НО переключение Qi идет последовательно
Q0
Q1
Q2
4→5→7→3→0→4→…
RESET0,1
16
17. Асинхронные цифровые автоматы – основной недостаток
Автомат МилиАвтомат Мура
δ(A, Z) – комбинационная логика
разность логических путей, «гонки» сигналов
риски сбоев в асинхронных автоматах
17
18.
 Кольцевой счетчик (счетчик в коде “1 из N”, унитарный счетчик)18
Кольцевой счетчик (счетчик в коде “1 из N”, унитарный счетчик)18Вариант 1:
• на базе сдвигового регистра
• N состояний → N триггеров
• обязательная инициализация
• риск неустранимых ошибок
типа “лишние 1/0”
Вариант 2:
• на базе сдвигового регистра
• N состояний → N-1 триггеров
• ???
• автоматический вход в
рабочий цикл за ≤N-2 тактов
(автоматическое исправление
ошибок)
19. Счетчик Джонсона и кольцевой счетчик на его основе
19Счетчик Джонсона:
• на базе сдвигового регистра
• N состояний → N/2 триггеров
• обязательная инициализация
• риск неустранимых сбоев
типа “лишние 1/0”
Сравнение с кольцевым счетчиком на базе регистра
Вар. 3 кольцевого счетчика:
• на базе счетчика Джонсона
• N состояний → N/2 триггеров
• риск неустранимых сбоев
типа “лишние 1/0”
• простое получение выходных
функций вида _
_
Fi = Qi ∙ Qi+1 ∙ Fi-1
20. Граф и таблица переходов автомата
∀\QnM=1
∀\Qn
0
M=0
Пример — двухрежимный счетчик
M=1
12
M=0
1
11
2
10
3
9
4
8
5
7
6
Какой тип автомата в таблице ?
20
Неполные двоично кодированные счетчики.
Методы синтеза
•1
•2
•3
сделать в 2018-2019у.г.
21
22. Cинхронизация блоков в тракте цифровой обработки сигналов
22Простое размножение тактового сигнала:
• простая схема с промежуточной регенерацией
формы тактового сигнала
• накопление рассинхронизации на неоднородностях
элементов и разностях физических длин проводников
ФАПЧ – фазовая автоподстройка частоты:
• автокоррекция периода синхросигнала
• аналоговая схема → постоянное потребление
[Угрюмов Е.П., Цифровая схемотехника]
23. Cинхронизация блоков в тракте цифровой обработки сигналов
Однофазная:• строго динамические триггеры
• строгие интервалы между фазами
ЦОС
23
Двухфазная (многофазная):
• могут использоваться триггеры-защелки
• можно варьировать интервалы между фазами ЦОС
• необходимо формирование системы синхросигналов
[Угрюмов Е.П., Цифровая схемотехника]
24. Некоторые специальные применения триггеров
24Устранение дребезга контактов механических переключателей
[Ульрих Титце, Кристоф Шенк, Полупроводниковая схемотехника, том I]
25.
 Некоторые специальные применения триггеров25
Некоторые специальные применения триггеров25Синхронизация информационных сигналов
• Подавление метастабильных состояний
добавочным триггером
• Подавление импульсных помех
Синхронизация информационных сигналов
• Расширение коротких импульсов данных
• Нормирование длины импульсов
Вариант схемы одновибратора
• Формирование одиночного импульса
стандартной длины в ответ на импульс
данных неопределенной длины
[Ульрих Титце, Кристоф Шенк, Полупроводниковая схемотехника, том I]
26. Детектор переключения сигнала
26Y01 – переключение Х из 0 в 1
Y10 – переключение Х из 1 в 0
Y – любое переключение Х
Асинхронный сброс(установка) при переключении режима автомата
Двунаправленный обмен данными. Общие шины
27
Двунаправленный обмен данными. Общие шины
28
English Русский Правила
Лекции стр19.»Цифровая схемотехника»
Лекции стр19.»Цифровая схемотехника»Построение таблицы переходов по логической схеме цифрового автомата
Цифровой автомат – любое последовательное устройство.
Цифровой автомат в общем случае содержит N триггеров. Состояние цифрового автомата характеризуется N-разрядным двоичным словом, каждый разряд которого ассоциируется с состоянием соответствующего триггера т.к. для N разрядного слова существует 2
N кодовых наборов , 2N состояний будет характеризовать и поведение цифрового автомата.
Любой цифровой автомат в общем случае может быть представлен структурно как совокупность двух подсистем:
Поведение структуры описывается 4-мя группами сигналов:
Х – кодовое слово входного воздействия
Z – кодовое слово, обеспечивающее требуемый порядок смены состояний цифрового автомата
Q- кодовое слово, характеризующее состояние цифрового автоматаСигнал С- синхронизации, инициирующий переключение триггера в триггерной подсистеме. Формирование С, как правило, непосредственно связано с алгоритмом работы устройства, в любом конкретном случае оговаривается отдельно.
n≥log2M , где
При проектировании цифрового аппарата необходимо определить объем памяти или число триггеров, обеспечивающих заданный алгоритм работы цифрового аппарата:
n- ближайшее большое число,
М- число необх. из условий работы состояний цифрового аппарата
Необходимое число состояний цифрового аппарата М может быть определено как максимальное число значений выходного сигнала, которое может существовать при одном значении входного сигнала.
Работа цифрового аппарата может быть описана любой формой записи. Однако на практике чаще для первичной постановки задачи использовать словесное описание и таблицы состояний (переходов) или графы переходов (схемы состояния) т.к. все эти формы описывают один и тот же алгоритм работы, они легко преобразуется одна в другую.
Пример: Автомат для формирования сигнала перегрузки пассажирского лифта.
Допустим, что одновременно в кабине лифта, вмещающей 6 человек, могут транспортироваться не более 3-х человек. Если число пассажиров превышает 3-х, то должен выдаваться сигнал на блокировку работы лифта (сигнал перегрузки).
Входным сигналом является двоичный код, 1 в нулевом разряде который обозначает больше числа пассажиров на 1, что фиксируется датчиком, а 1 в первом разряде – уменьшение пассажиров на 1.
Решение: По словесному описанию алгоритма на входе цифрового автомата возможно действие трех различных входных сигналов:
- число пассажиров в лифте остается неизменно
- число пассажиров в лифте больше на одного
- число пассажиров в лифте меньше на одного
Таблица состояний включает: G+1 столбец, где G – число различных входных сигналов, которые могут быть на входе цифрового автомата: т.е. 3+1=4 столбца.
2n строк
Число необходимых состояний М определяется из анализа работы устройства:
— лифт пуст
— в лифте 1 чел
— в лифте 2 чел
— в лифте 3 чел
— в лифте 4 чел
— в лифте 5 чел
— в лифте 6 челМ=7 n≥log27 n=3 т.
е. исп.3 триггера состояние цифрового автомата характеризуется 3-х разр. двоичным числом строк 23=8
Таблица состояний цифрового автомата

S |
X |
||
00 |
01 |
10 |
|
000 |
000/0 |
001/0 |
— |
001 |
001/0 |
010/0 |
000/0 |
010 |
010/0 |
011/0 |
001/0 |
011 |
011/0 |
100/1 |
010/0 |
100 |
100/1 |
101/1 |
011/0 |
101 |
101/1 |
110/1 |
100/1 |
110 |
110/1 |
— |
101/1 |
111 |
— |
— |
— |
При заполнении таблицы состояния на пересечении j-го и i-ой строки
Записывается дробь:
— в числителе записывается состояние, в которое попадает цифровой автомат после прихода очередного импульса С, если он находился в i-ом состоянии и на его вход действовал j-ый входной сигнал
— в знаменателе указывается текущее значение выходного сигнала существующего в цифровой автомат до прихода очередного импульса С при нахождении его в i-ом состоянии при действии j-го входного сигнала.
Граф переходов – представляет собой графическую интерпретацию работы цифрового автомата. Им удобно пользоваться, если при первичном описании до конца не рассмотрен весь алгоритм работы и нельзя определить число М возможных состояний.
При числе состояний 2n >16 граф нагляднее таблицы.
Каждое состояние цифрового автомата изображено в виде окружности с указанием N или кода соответствующего состояния.
Переход от одного состояния к другому изображено в виде стрелки.
Над стрелкой записывается дробь:
— в числителе которой, дано значение входного сигнала, под действием которого, при очередном импульсе С, произойдет указанный переход.
— в знаменателе записывается текущее значение выходного сигнала, соответствующее указанным состоянию и значению выходного сигнала.
Состояние 111 является лишним, т.к. с точки зрения устройства оно не используется. В графе переходов лишние состояние образуют изолированную вершину
Так, если лифт пустой (что соответствует S=000) и в него входит один человек (входной сигнал 01), то следующим будет новое состояние (S=001).При этом сигнал перегрузки Z не формирует 0.
Правила синтеза логической схемы цифрового автомата.
- По условию работы цифрового автомата определяют число необходимых состояний и требуемый объем памяти его триггерной подсистемы
- Выполняют формальное описание алгоритма работы цифрового автомата, т.е. составляют таблицу состояний или граф переходов.
- Выбирают тип триггера для реализации триггерной подсистемы.
- Используя формализованный алгоритм работы цифрового автомата и таблицы истинности для выбранного типа триггера, составляют расширенную таблицу переходов.
Число строк таблицы равно максимальному числу значений входного сигнала комбинационной подсистемы.

Число столбцов таблицы 5:
Х – входной сигнал;
Qn – текущее состояние;
Qn+1 – следующее состояние;
Y – входные сигналы на информационных входах триггеров;
Z – выходные сигналы.
- Используя расширенную таблицу переходов, минимизируют ФАЛ, описывающие комбинационную подсистему цифрового автомата.
- По полученным ФАЛ строят логическую схему цифрового автомата.
Пример: Вернемся к нашему примеру.
1 и 2 пункты уже сделаны, выберем тип триггера.
Нет однозначных рекомендаций по выбору типа триггера, чтобы в дальнейшем получить наиболее простую техническую реализацию. Однако при выборе триггера, информационные сигналы которые содержат большое число неопределенных значений входного сигнала, структура цифрового аппарата получается более проста.
Рекомендуется предпочтение отдавать JK,RS и триггер
3 пункт: выбираем JK-Триггер
4 пункт: получение расширенной таблицы истинности
По таблице состояний – на вход комбинационной подсистемы действующих 5 переменных: х1,х0 – входные управляющие сигналы,
Q2 Q1 Q0 – вых.сост. триггерной подсистемы
Расширенная таблица истинности должна содержать 25=32 строки, что усложняет процедуру проектирования.
Для упрощения проектирования необходимо понизить число входных переменных комбинационной подсистемы.
Обратимся к таблице состояний.
Объем памяти понижать не можем, т.к. он определяется числом состояний М.Пути упрощения данного алгоритма:
2 способ:
2-х разрядный код воздействия отражает всего 2 ситуации человек вошел в лифт (01) и человек вышел (10)
Код 11 невозможен по условиям работы устройства
Код 00 при нем по каждому сигналу С происходит подтверждение текущего состояния и выходных сигналов устройства.
Того же эффекта можно добиться если нет изменения состояния, сигнал С будет отсутствовать и триггер будет в режиме хранения информации.
Тогда используя асинхронный триггер, внешнее воздействие на устройство можно представить одноразрядным двоичным кодом.
Число строк ниже в 2 раза:
24=161 способ:
Присвоение входным воздействиям различного приоритета, так чтоб устройство при поступлении одновременно нескольких входных сигналов выбирало бы наиболее важный.
Так по условию надо формировать сигнал перегрузки. Увеличение числа пассажиров (х0=1) – имеет повышенный приоритет.
Таблица истинности должна рассматривать все возможные ситуации в работе, для однозначного определения поведения устройства в любых аварийных ситуациях.
Хотя по условию работы входной сигнал 11 не возможен, по таблице истинности должны рассмотреть все варианты.
При появлении кода 11 устройство должно реагировать как на сигнал 01.
Тогда в данном случае можно сократить число строк на 8.
2 способ: Воспользуемся вторым способом, но этот способ не снял вопрос об изолированных вершинах графа переходов, т.е. надо предусмотреть возможность выхода устройства из запрещенных аварийных ситуаций. Место алгоритма, куда должно вернуться устройство при этом, определяется из условий его работы.
Пусть у нас формируется сигнал аварии и триггерная подсистема возвращается в исходное состояние (000). Пусть такие же действия сопровождаются и нереальные ситуации (лифт пуст, а человек из него выходит).Скорректированный с учетом сказанного алгоритм приведен в таблицу переходов:
S |
X |
|
Х=0(выход) |
Х=1(вход) |
|
000 |
000/01 |
001/00 |
001 |
000/00 |
010/00 |
010 |
001/00 |
011/00 |
011 |
010/00 |
100/10 |
100 |
011/00 |
101/10 |
101 |
100/10 |
110/10 |
110 |
101/10 |
000/01 |
111 |
000/01 |
000/01 |
Z1=1 – сигнал перегрузки
Z0=1 сигнал аварииПо скорректированной таблице переходов построить расширенную таблицу истинности с учетом выбранного типа триггера.

х |
Q2n |
Q1n |
Q0n |
Q2n+1 |
Q1n+1 |
Q0n+1 |
J2 |
K2 |
J1 |
K1 |
J0 |
K0 |
Z1 |
Z0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
— |
0 |
— |
0 |
— |
0 |
1 |
0 |
0 |
0 |
1 |
0 |
0 |
0 |
0 |
— |
0 |
— |
— |
1 |
0 |
0 |
0 |
0 |
1 |
0 |
0 |
0 |
1 |
0 |
— |
— |
1 |
1 |
— |
0 |
0 |
0 |
0 |
1 |
1 |
0 |
1 |
0 |
0 |
— |
— |
0 |
— |
1 |
0 |
0 |
0 |
1 |
0 |
0 |
0 |
1 |
1 |
— |
1 |
1 |
— |
1 |
— |
0 |
0 |
0 |
1 |
0 |
1 |
1 |
0 |
0 |
— |
0 |
0 |
— |
— |
1 |
1 |
0 |
0 |
1 |
1 |
0 |
1 |
0 |
1 |
— |
0 |
— |
1 |
1 |
— |
1 |
0 |
0 |
1 |
1 |
1 |
0 |
0 |
0 |
— |
1 |
— |
1 |
— |
1 |
0 |
1 |
1 |
0 |
0 |
0 |
0 |
0 |
1 |
0 |
— |
0 |
— |
1 |
— |
0 |
0 |
1 |
0 |
0 |
1 |
0 |
1 |
0 |
0 |
— |
1 |
— |
— |
1 |
0 |
0 |
1 |
0 |
1 |
0 |
0 |
1 |
1 |
0 |
— |
— |
0 |
1 |
— |
0 |
0 |
1 |
0 |
1 |
1 |
1 |
0 |
0 |
1 |
— |
— |
1 |
— |
1 |
1 |
0 |
1 |
1 |
0 |
0 |
1 |
0 |
1 |
— |
0 |
0 |
— |
1 |
— |
1 |
0 |
1 |
1 |
0 |
1 |
1 |
1 |
0 |
— |
0 |
1 |
— |
— |
1 |
1 |
0 |
1 |
1 |
1 |
0 |
0 |
0 |
0 |
— |
1 |
— |
1 |
0 |
— |
0 |
1 |
1 |
1 |
1 |
1 |
0 |
0 |
0 |
— |
1 |
— |
1 |
— |
1 |
0 |
1 |
По таблице истинности записываем ФАЛ:
По ФАЛ можно построить принципиальную схему:
Берем 3 триггера и заводим на каждый вход соответствующие функции.
Схема большая приводить не будем.Построение таблицы переходов по логической схеме цифрового автомата
Данная задача является обратной к выше рассматриваемой и позволяет по известной схеме цифрового автомата определить его реакцию на заданную последовательность входных сигналов.
Реакцию на последовательность входных сигналов можно определить по таблице или по графу переходов цифрового автомата. Получить их можно по методике:
- По логической схеме цифрового автомата записывают ФАЛ, связывающее его выходные сигналы и сигналы на информационных входах Т с входными сигналами и кодами состояний триггерной подсистемы.
- Строят расширенную таблицу истинности.
- Записываются все возможные комбинации входных сигналов и кодов состояния триггерной подсистемы
- По ФАЛ для записанных входных воздействий комбинационной подсистемы отыскивают соответствующие значения выходных сигналов и сигналов на информационных входах триггеров;
- По известным информационным сигналам триггеров и таблице истинности переходов находят коды следующих состояний триггерной подсистемы
- По расширенной таблице истинности составляют таблицу состояний или граф переходов цифрового автомата.
Пример:
Для заданной схемы определяют на входное воздействие вида 1,1,0,0,1,1,0 при условии, что в исходном положении код состояния триггерной подсистемы =11.
Решение:
1. Записываем ФАЛ для выходных сигналов Z1 и Z0 и сигналов на информационных входах триггеров Т1 и Т0.
2.Заполняем расширенную таблицу истинности.
Для этого сигнала записываем не возможные комбинации сигналов х и Q1nQ0n, находим Z1, Z0 и Т1, Т0 и по таблице переходов Т-триггера следующее состояния триггеров (n+1).
х |
Q1n |
Q0n |
Q1n+1 |
Q0n+1 |
T1 |
T0 |
Z1 |
Z0 |
0 |
0 |
0 |
0 |
1 |
0 |
1 |
1 |
1 |
0 |
0 |
1 |
0 |
0 |
0 |
1 |
1 |
1 |
0 |
1 |
0 |
0 |
1 |
1 |
1 |
1 |
0 |
0 |
1 |
1 |
0 |
0 |
1 |
1 |
0 |
0 |
1 |
0 |
0 |
1 |
0 |
1 |
0 |
0 |
1 |
1 |
0 |
1 |
1 |
0 |
1 |
1 |
0 |
0 |
1 |
1 |
0 |
1 |
0 |
0 |
0 |
0 |
0 |
1 |
1 |
1 |
0 |
0 |
1 |
1 |
0 |
0 |
3.
Строим граф переходов.
Для временных диаграмм предположим, что в момент n T прихода синхроимпульса на входе управления есть предыдущий сигнал Х и его смена происходящая после переключения триггеров.Вернутся к содержанию…
Используются технологии uCoz
Цифровой автомат (стр. 1 из 3)
Коммуникации и связь
- СТРУКТУРНАЯ СХЕМА ЦИФРОВОГО АВТОМАТА
ЦА представляет собой последовательностную схему и служит для обработки дискретной информации структурная схема ЦА представлена на рис 1.
В операционном устройстве выполняются арифметические и логические операции, в качестве узлов в состав операционного устройства входят: регистры, счетчики, сумматоры, дешифраторы и др. Управляющие устройства координируют действия узлов операционного устройства, оно определенной временной последовательности вырабатывает управляющие сигналы под действием которых в узлах операционного устройства выполняются требуемые функции.
Процессорное устройство описывается множеством входных сигналов являющихся исходными данными. Множеством результатов Z1-Zm, управляющее устройство вырабатывает множество управляющих сигналов y1-yn, операционное устройство вырабатывает множество признаков X1-Xs, которые позволяют изменить последовательность выполненных микрокоманд. На последовательность выполнения микрокоманд так же влияют внешние признаки Xs+1-XL.
2.АЛГОРИТМ ФУНКЦИОНИРОВАНИЯ ЦИФРОВОГО АВТОМАТА
В состав процессорного устройства входят регистры, счетчики и дешифратор. Пусть регистр Р1 хранит число А. В регистр Р2 поочередно заносятся элементы проверяемого массива, счетчик 1 служит для подсчета числа циклов. Счетчик 2 служит для подсчета числа элементов =А. Дешифратор используется для формирования признака х. Алгоритм функционирования автомата в микрооперациях представлен на рис.2
 Под действием управляющего сигнала y3 в регистре R3 записываются число А ив сумматоре 1 сравнивается числа Аи х. На выходе переноса сумматора вырабатывается признак х. Если х<А то признак х=1 и выполняется переход на формирование управляющего сигнала y5, если наоборот то х=0 и выполняется переход на формирование управляющего импульса у4. Под действием управляющего сигнала y5 в сумматоре 2 должен быть организован режим сложения и в нем вычисляется х+В. Под действием управляющего сигнала у4 в сумматоре должен быть организован режим вычитания и вычисляется х-В. Под действием управляющего сигнала у6 результат полученный в сумматоре 2 записывается в регистр R4.
Под действием управляющего сигнала y3 в регистре R3 записываются число А ив сумматоре 1 сравнивается числа Аи х. На выходе переноса сумматора вырабатывается признак х. Если х<А то признак х=1 и выполняется переход на формирование управляющего сигнала y5, если наоборот то х=0 и выполняется переход на формирование управляющего импульса у4. Под действием управляющего сигнала y5 в сумматоре 2 должен быть организован режим сложения и в нем вычисляется х+В. Под действием управляющего сигнала у4 в сумматоре должен быть организован режим вычитания и вычисляется х-В. Под действием управляющего сигнала у6 результат полученный в сумматоре 2 записывается в регистр R4.

 При котором триггер Т1 переходит из нулевого состояния в единичное, поэтому необходимо подать управляющий сигнал S1.
При котором триггер Т1 переходит из нулевого состояния в единичное, поэтому необходимо подать управляющий сигнал S1.
читать дальше
1
2
3
Технические аспекты построения управляющих автоматов при проектировании цифровых устройств на основе современных ПЛИС
Управляющие конечные автоматы (УКА) применяются в цифровых электронных устройствах для аппаратной реализации алгоритмов управления трактами передачи и обработки данных в объеме функциональных блоков и узлов. Управляющие конечные автоматы представляют собой логические цифровые узлы, относящиеся к классу конечных автоматов (или просто автоматов).
Управляющие конечные автоматы представляют собой логические цифровые узлы, относящиеся к классу конечных автоматов (или просто автоматов).
Конечный автомат (Finite State Machine, FSM, машина с конечным числом состояний) — это синхронный цифровой блок, имеющий управляющие и системные входы и выходы, способный находиться в одном из заданного множества состояний, переходы между которыми обусловлены последовательностью подачи входных управляющих сигналов, а выходные значения генерируются на основе состояний и входных комбинаций.
Следует обратить внимание, что далее рассматриваются исключительно синхронные автоматы, способные изменять свое внутреннее состояние только в моменты изменения входных системных сигналов синхронизации и асинхронной начальной установки.
К системным входам УКА относятся входы для подачи синхросигнала CLK и сигнала асинхронной (по отношению к синхросигналу CLK) начальной установки RST.
К управляющим входам относятся все входы УКА, кроме системных входов. Сигналы, подаваемые на управляющие входы, регистрируются по рабочему фронту синхросигнала CLK, определяющему границы длительности тактовых интервалов. До и после рабочего фронта синхросигнала входные управляющие сигналы должны оставаться стабильными и не менять своего состояния в течение окна стабильности — регламентированного спецификацией используемой элементной базы временного интервала, включающего рабочий фронт синхросигнала и требуемого для стабильной работы триггеров и регистров.
Сигналы, подаваемые на управляющие входы, регистрируются по рабочему фронту синхросигнала CLK, определяющему границы длительности тактовых интервалов. До и после рабочего фронта синхросигнала входные управляющие сигналы должны оставаться стабильными и не менять своего состояния в течение окна стабильности — регламентированного спецификацией используемой элементной базы временного интервала, включающего рабочий фронт синхросигнала и требуемого для стабильной работы триггеров и регистров.
Выходы УКА не делятся на группы и предназначены для вывода синхронных сигналов, действительных в окне стабильности и изменяющих свое состояние согласно предусмотренному алгоритму работы. Выходные сигналы конечных автоматов могут иметь различные временные характеристики, обусловленные логической организацией автомата. Ниже рассмотрены различные варианты логической организации УКА.
Обобщенное представление конечного автомата показано на рис. 1. В данном примере, помимо системных входов CLK и RST, автомат имеет n шт. управляющих входов A(n–1 : 0), m шт. выходов V(m–1 : 0) и k шт. линий внутренних состояний Q(k–1 : 0). Таким образом, на входы автомата в каждом такте работы может быть подана одна из 2n шт. входных комбинаций ai, на выходы автомата в каждом такте может быть выставлена одна из 2m шт. выходных комбинаций v0, а максимальное количество внутренних состояний рассматриваемого автомата ограничено 2k шт. комбинаций qs.
управляющих входов A(n–1 : 0), m шт. выходов V(m–1 : 0) и k шт. линий внутренних состояний Q(k–1 : 0). Таким образом, на входы автомата в каждом такте работы может быть подана одна из 2n шт. входных комбинаций ai, на выходы автомата в каждом такте может быть выставлена одна из 2m шт. выходных комбинаций v0, а максимальное количество внутренних состояний рассматриваемого автомата ограничено 2k шт. комбинаций qs.
Работу синхронного автомата поясняет временная диаграмма, изображенная на рис. 2.
Рис. 1. Обобщенное представление конечного автомата
Рис. 2. Временная диаграмма работы синхронного конечного автомата
В начале работы, а также после подачи аппаратного сброса системы генерируется асинхронный сигнал начальной установки RST, задающий интервал «сброса по включению питания» (Power-On-Reset, POR). В течение интервала POR состояние всех входов, кроме RST, игнорируется, а все регистры и триггеры устанавливаются в исходное состояние, задаваемое по усмотрению разработчика для корректного старта системы.
Многие производители ПЛИС, а также систем проектирования СБИС рекомендуют использовать синхронные сигналы начальной установки (сброса) (Synchronous Reset, SR). В ряде САПР имеется возможность автоматической замены асинхронных сигналов сброса на синхронные. Например, в системе Xilinx ISE 10.1 в настройках параметров синтеза проекта в разделе HDL Options для этой цели предусмотрена опция Asynchronous to Synchronous. Применение асинхронных сигналов начальной установки сложилось исторически, начиная с логических микросхем серий 74xxx. Так, в триггере 74xx74 (отечественный аналог — ТМ2) предусмотрены асинхронные сигналы установки в состояния «лог. 0» и «лог. 1». Асинхронная начальная установка поддерживается регистрами большинства семейств ПЛИС, как устаревших, так и современных. В то время как применение синхронных сбросов при проектировании в базисе элементов, где эта возможность аппаратно не поддерживается, потребует использования дополнительных комбинационных цепей обратной связи, что усложнит проект. Таким образом, модели устройств с асинхронной начальной установкой на данный момент более универсальны и могут быть преобразованы в полностью синхронные средствами САПР (при этом изменяется функциональность проекта относительно исходной модели, что может привести к сбоям или неработоспособности устройства).
Таким образом, модели устройств с асинхронной начальной установкой на данный момент более универсальны и могут быть преобразованы в полностью синхронные средствами САПР (при этом изменяется функциональность проекта относительно исходной модели, что может привести к сбоям или неработоспособности устройства).
Применение синхронных или асинхронных сигналов начальной установки не отражается на штатном функционировании УКА, вследствие чего ограничимся рассмотрением асинхронного сигнала.
По завершении интервала POR автомат начинает функционировать согласно заданному алгоритму, воспринимая входные управляющие сигналы A(i) по рабочим фронтам синхросигнала в моменты времени t1, t2, t3, t4 и т. д.
В зависимости от логической организации конечного автомата выходные сигналы могут отличаться формой, стабильностью переходного процесса и задержками относительно синхросигнала. На рассмотренной диаграмме приведены выходные сигналы, соответствующие наиболее общей организации автомата — модели Мили (Mealy) [2, 4, 5]. Выходные сигналы, вырабатываемые автоматом Мили, должны иметь устойчивое состояние только в окне стабильности для надежной фиксации внешними регистрами, работающими по единому с автоматом синхросигналу. За пределами окон стабильности выходные сигналы автомата Мили могут изменять состояние произвольно.
Выходные сигналы, вырабатываемые автоматом Мили, должны иметь устойчивое состояние только в окне стабильности для надежной фиксации внешними регистрами, работающими по единому с автоматом синхросигналу. За пределами окон стабильности выходные сигналы автомата Мили могут изменять состояние произвольно.
Состояния автомата, соответствующие комбинациям qS, изменяются после рабочего фронта синхросигнала с задержкой TCO (Clock-to-Output), вносимой триггерами и регистрами в силу особенностей их конструкции. Задержка TCO также обеспечивает изменение сигналов, формируемых регистрами и триггерами, вне окон стабильности в объеме кристалла СБИС (данное свойство не распространяется на внешние по отношению к кристаллам синхронные интерфейсы PCI и SDRAM). Немаловажным фактом является стабильность переходного процесса сигналов, формируемых на триггерах и регистрах, обусловленная однократным изменением состояния этих сигналов, что отражено на диаграмме (рис. 2) применительно к состояниям автомата.
Математическая модель автомата [1] определяется тремя множествами и двумя функциями, осуществляющими отображения этих множеств.
Множество входных комбинаций ai задано конечным входным алфавитом A:
Множество выходных комбинаций v0 задано конечным выходным алфавитом V:
Множество состояний qs задано конечным алфавитом состояний Q:
Функция переходов G осуществляет отображение элементов входного алфавита и алфавита состояний в алфавит состояний, обеспечивая переходы из одного состояния в другое:
Функция выходов F осуществляет отображение элементов входного алфавита и алфавита состояний в выходной алфавит:
Для построения требуемого автомата необходимо определить его интерфейс, имеющий фиксированное количество входов и выходов, а также алгоритм работы, согласно которому вырабатываются выходные сигналы. Алгоритм работы влияет на количество состояний, образующих алфавит Q. Количество входов определяет число входных комбинаций из алфавита A, а количество выходов — число выходных комбинаций из алфавита V.
Функционирование автомата согласно требуемому алгоритму описывается тремя способами задания автомата:
- автоматной таблицей;
- каноническими уравнениями;
- графом переходов.
Рассмотрим способы задания автомата на примере модели Мили. Эта модель описывает наиболее общий вариант автомата, в котором текущая выходная комбинация зависит от текущей входной комбинации и текущего состояния. Структурная схема автомата Мили представлена на рис. 3.
Рис. 3. Структурная схема автомата Мили
Для фиксации текущего состояния автомата Q используется регистр состояния, имеющий системные сигналы, общие с внешними регистрами. Выходные сигналы V вырабатываются комбинационной логической схемой CL_F, реализующей функцию выходов F. Следующее состояние автомата QNXT формируется комбинационной логической схемой CL_G, реализующей функцию переходов G.
В теории автоматов выделяют автоматы первого и второго рода [9]. На рис. 3 представлен автомат первого рода. Автоматы второго рода отличаются функцией выходов, формирующей выходные значения на основе обновленного состояния, в котором автомат окажется на следующем такте.
Автоматы второго рода отличаются функцией выходов, формирующей выходные значения на основе обновленного состояния, в котором автомат окажется на следующем такте.
Автоматная таблица для каждой пары из входной комбинации и состояния автомата задает текущую выходную комбинацию и следующее состояние. Столбцам таблицы соответствуют текущие состояния, а строкам — текущие входные комбинации. Формат автоматной таблицы показан на рис. 4б. В ячейках таблицы данные указываются в виде дроби: следующие состояния — в числителе и текущие выходные комбинации — в знаменателе.
Рис. 4. Способы задания автомата Мили: а) графом переходов; б) автоматной таблицей
Канонические уравнения автомата Мили представлены системой из двух уравнений, задающих функции выходов и переходов:
где q(t–1) — предыдущее состояние, q(t) — текущее состояние, q(t+1) — следующее состояние; a(t–1) — входная комбинация на предыдущем такте, a(t) — текущая входная комбинация; v(t) — текущая выходная комбинация.
Для цифровых двоичных автоматов канонические уравнения могут быть представлены в виде набора дизъюнктивных нормальных форм — ДНФ, заданных для каждого разряда состояния и каждого выхода автомата.
Любой конечный автомат может быть задан в графическом виде с помощью графа переходов [2, 3]. Граф переходов, или диаграмма состояний (State Diagram), — это ориентированный граф, вершинам которого соответствуют состояния, а переходам — направленные дуги, соответствующие входным комбинациям.
Пример графа переходов для автомата Мили приведен на рис. 4а. Если сложно расположить все вершины графа и все соединяющие дуги на одном рисунке, можно представить его в виде отдельных графов, описывающих переходы из одной или нескольких вершин. Вершина RESET соответствует начальной установке автомата в исходное состояние в течение интервала POR. Дугам, для которых не указаны входные комбинации, соответствуют безусловные переходы, которые предопределены алгоритмом работы независимо от входных сигналов. Дугам графа с пометкой «иначе» (else) соответствуют переходы, выполняемые во всех случаях, кроме заданных явно путем указания входной комбинации. В графе переходов автомата Мили для каждой дуги указываются выходные комбинации, соответствующие текущему состоянию и входной комбинации. Подобно автоматной таблице, в графе переходов выходные комбинации указываются в знаменателе дроби.
Дугам графа с пометкой «иначе» (else) соответствуют переходы, выполняемые во всех случаях, кроме заданных явно путем указания входной комбинации. В графе переходов автомата Мили для каждой дуги указываются выходные комбинации, соответствующие текущему состоянию и входной комбинации. Подобно автоматной таблице, в графе переходов выходные комбинации указываются в знаменателе дроби.
Среди недостатков автомата Мили наиболее существенным является отсутствие регистровой развязки по выходам, что может привести к созданию длинных цепочек из комбинационных схем при применении автомата. На рис. 5 продемонстрировано образование длинной комбинационной цепочки, вносящей значительную задержку в распространение сигналов через автомат Мили. Увеличение числа каскадов логических комбинационных схем или их усложнение влечет увеличение задержки прохождения сигналов между регистрами, что приводит к снижению тактовой частоты синхросигнала.
Рис. 5. Распространение сигналов через автомат Мили
Второй по значимости недостаток автомата Мили обусловлен вероятностью нестабильного переходного процесса выходных сигналов.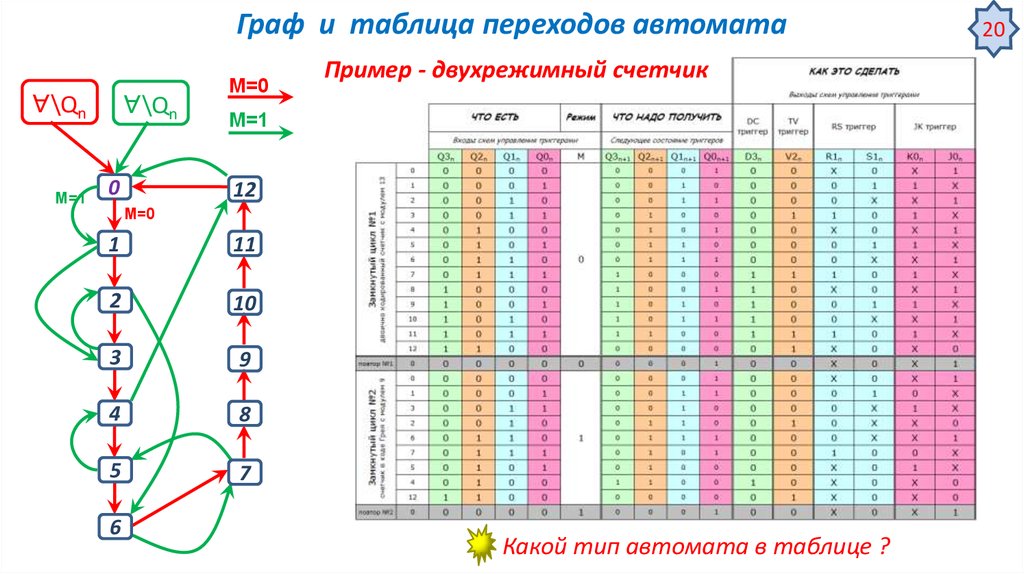 Эту особенность поясняет рис. 6. Нестабильный переходный процесс заключается в многократных изменениях выходных сигналов за пределами окон стабильности регистров и триггеров.
Эту особенность поясняет рис. 6. Нестабильный переходный процесс заключается в многократных изменениях выходных сигналов за пределами окон стабильности регистров и триггеров.
Рис. 6. Временная диаграмма переключения автомата Мили
На рис. 6 нестабильный переходный процесс продемонстрирован применительно к одному из выходов автомата — V(i). Такой выходной сигнал будет корректно воспринят регистрами и триггерами, работающими по единому с автоматом синхросигналу. Однако выходной сигнал автомата Мили невозможно использовать для непосредственного тактирования триггеров или управления триггерами-защелками, ибо многократные изменения выходных комбинаций вне окон стабильности могут вызвать ложные срабатывания управляемых таким способом узлов.
Следует отметить, что необходимость непосредственного управления входами синхронизации на практике возникает редко и в большинстве случаев связана с реализацией интерфейсов между кристаллом ПЛИС/СБИС и внешними микросхемами, например при взаимодействии с последовательной памятью типа EEPROM по интерфейсам SPI (серия 25xx) и Microwire (серия 93Cxx). В объеме кристалла подобное управление синхросигналом использовать не рекомендуется, и для его замещения предназначен механизм разрешения синхронизации CE (Clock Enable), основанный на введении мультиплексора на информационном входе D-триггера. Мультиплексор, управляемый сигналом CE, коммутирует на вход D-триггера данные для записи при CE = «1» либо коммутирует текущее состояние с выхода триггера, обеспечивая режим хранения при CE = «0». В большинстве современных ПЛИС механизм разрешения синхронизации реализован аппаратно во всех регистрах.
В объеме кристалла подобное управление синхросигналом использовать не рекомендуется, и для его замещения предназначен механизм разрешения синхронизации CE (Clock Enable), основанный на введении мультиплексора на информационном входе D-триггера. Мультиплексор, управляемый сигналом CE, коммутирует на вход D-триггера данные для записи при CE = «1» либо коммутирует текущее состояние с выхода триггера, обеспечивая режим хранения при CE = «0». В большинстве современных ПЛИС механизм разрешения синхронизации реализован аппаратно во всех регистрах.
Основное преимущество использования автомата Мили заключается в возможности реакции автомата в течение текущего такта, что обусловлено зависимостью текущей выходной комбинации v0 от текущей входной комбинации ai.
Второй вариант логической организации автомата представлен канонической моделью Мура (Moore) [2]. Модель Мура, или автомат типа состояние-выход, является частным случаем автомата Мили, в котором текущая выходная комбинация зависит исключительно от текущего состояния (рассмотрен автомат Мура первого рода). Структурная схема автомата Мура представлена на рис. 7.
Структурная схема автомата Мура представлена на рис. 7.
Рис. 7. Структурная схема автомата Мура
Канонические уравнения для автомата Мура представляются в общем случае следующей системой:
В графе переходов автомата Мура (рис. 8а) выходные комбинации указываются не для дуг, а для вершин, ибо не зависят от текущих входных комбинаций.
Рис. 8. Способы задания автомата Мура: а) графом переходов; б) автоматной таблицей
Автоматная таблица для модели Мура (рис. 8б) дополнена строкой, в которой перечисляются выходные комбинации, а в ячейках указаны исключительно следующие состояния автомата.
Отметим следующие недостатки автомата Мура:
- Наличие значительной выходной задержки, обусловленной переключением комбинационной схемы генератора выходов F.
- Возможность возникновения нестабильного переходного процесса на выходе автомата вследствие поочередного переключения каскадов выходной комбинационной схемы F.
- Выходная реакция на входные воздействия проявляется на следующем такте, то есть автомат вносит задержку на один такт.

Среди преимуществ канонической модели Мура основным является отсутствие сквозного распространения сигнала через комбинационную схему от входа до выхода автомата.
Первые два из перечисленных недостатков поясняют рис. 9 и 10. Сквозной путь распространения сигналов, имевший место в автомате Мили, разделен регистром состояния автомата Мура на два параллельно функционирующих сегмента. Таким образом снижается сложность комбинационной логики и уменьшаются задержки распространения между регистрами, что способствует повышению тактовой частоты синхросигнала.
Рис. 9. Распространение сигналов в автомате Мура
Рис. 10. Временная диаграмма переключения автомата Мура
Наличие на выходе автомата Мура комбинационной схемы может вызвать нестабильность переходного процесса за пределами окон стабильности регистров и триггеров. Это явление объясняется вероятностью одновременного переключения двух и более разрядов состояния автомата, способного вызвать многократные переключения на выходах при распространении сигналов через каскады комбинационной схемы F. Таким образом, выходной сигнал автомата, построенного по канонической модели Мура, устойчиво фиксируется триггерами и регистрами, работающими по единому с автоматом синхросигналу. Тем не менее выходной сигнал такой формы невозможно использовать для непосредственного управления триггерами типа Flip-Flop по входам синхронизации CLK (C) или триггерами-защелками (Latch) по входам загрузки GATE (G) вследствие вероятности ложных срабатываний управляемых таким способом узлов.
Таким образом, выходной сигнал автомата, построенного по канонической модели Мура, устойчиво фиксируется триггерами и регистрами, работающими по единому с автоматом синхросигналу. Тем не менее выходной сигнал такой формы невозможно использовать для непосредственного управления триггерами типа Flip-Flop по входам синхронизации CLK (C) или триггерами-защелками (Latch) по входам загрузки GATE (G) вследствие вероятности ложных срабатываний управляемых таким способом узлов.
Третий вариант логической организации автомата представлен моделью Мура с регистровым выходом (Look-ahead Moore Output, выход с предсказанием). Автомат Мура с регистровым выходом функционирует идентично канонической модели Мура, однако лишен наиболее существенных из ее недостатков [2]. Структурная схема такого автомата представлена на рис. 11.
Рис. 11. Структурная схема автомата Мура с регистровым выходом
Основное отличие от канонической модели Мура — наличие выходного регистра, имеющего задержку распространения сигналов, равную одному такту синхронизации. Для компенсации этой задержки комбинационная схема генератора выходов F подключена не к текущему состоянию автомата Q, а к выходам комбинационной схемы переходов G, вырабатывающей следующее состояние QNXT. Таким образом, на информационный вход выходного регистра поступает следующая выходная комбинация VNXT, которая должна появиться на выходах в следующем такте.
Для компенсации этой задержки комбинационная схема генератора выходов F подключена не к текущему состоянию автомата Q, а к выходам комбинационной схемы переходов G, вырабатывающей следующее состояние QNXT. Таким образом, на информационный вход выходного регистра поступает следующая выходная комбинация VNXT, которая должна появиться на выходах в следующем такте.
В связи с изменениями в структурной схеме можно тождественно преобразовать канонические уравнения автомата Мура следующим способом:
С введением регистра на выходе автомата устраняются выходные задержки и нестабильность переходного процесса, свойственные канонической модели Мура. Такой автомат способен устойчиво управлять триггерами, регистрами, защелками, счетчиками и прочими автоматами непосредственно по входам синхронизации и разрешения, вследствие того, что, как отмечалось выше, переходный процесс сигналов, вырабатываемых регистрами, лишен многократных переключений вне окон стабильности. Иными словами, в течение такта синхронизации одноразрядный выходной сигнал регистра может переключаться не более одного раза.
Способы задания автомата с регистром на выходе идентичны оным для канонической модели Мура. Комбинационные логические схемы переходов-G и выходов-F в автомате с выходным регистром полностью повторяют комбинационные схемы F и G автомата, реализующего такой же алгоритм и построенного по канонической модели Мура.
Применение автомата Мура с выходным регистром увеличивает задержку распространения сигналов по входу, из-за переноса комбинационной схемы F на вход регистра. В то же время выходными сигналами такого автомата можно синхронизировать регистры, счетчики, прочие автоматы и защелки. Выходная задержка автомата с регистром на выходе минимальна и сводится к выходной задержке данного регистра относительно синхросигнала (параметр TCO). Очевидно, что построить автомат Мура с меньшей задержкой по выходу относительно синхросигнала невозможно. Уменьшение выходной задержки позволяет сократить время распространения сигналов от регистров автомата до входов внешних регистров, что способствует повышению быстродействия. Пример распространения сигналов по входу и выходу автомата с выходным регистром приведен на рис. 12.
Пример распространения сигналов по входу и выходу автомата с выходным регистром приведен на рис. 12.
Рис. 12. Распространение сигналов в автомате Мура с выходным регистром
В рассматриваемом примере из группы выходов автомата выделен сигнал V(i), подаваемый на синхронизирующий вход регистра счетчика. Счетчик переключается при формировании автоматом на выходе V(i) положительного фронта (перехода из «лог. 0» в «лог. 1»), являющегося рабочим фронтом синхросигнала для регистра счетчика. В отличие от рассмотренных ранее автоматов, переходный процесс сигнала V(i) стабилен, то есть уровень выходного сигнала изменяется не более одного раза в течение такта, и в течение переходного процесса происходит только увеличение или только уменьшение потенциала.
Используя математический аппарат, стабильность переходного процесса сигнала в синхронном цифровом устройстве можно сформулировать следующим образом:
Стабильный переходный процесс синхронизированного логического сигнала, кодируемого электрическим потенциалом (уровнем напряжения), осуществляется во временных интервалах между окнами стабильности регистров, причем производная потенциала данного сигнала по времени не отрицательна в течение такта синхросигнала при установке высокого логического уровня и не положительна в течение такта синхросигнала при установке низкого логического уровня.
Таким образом, установка высокого логического уровня сигнала V(i) для стабильности переходного процесса требует выполнения условия:
а установка низкого логического уровня для стабильности переходного процесса требует выполнения условия:
Графически стабильность переходного процесса синхронизированного логического сигнала V(i) поясняет рис. 13. Вопросы стабильности переходных процессов при переключении триггеров типа Flip-Flop детально рассмотрены в работах [6–8].
Рис. 13. Стабильный переходный процесс синхронизированного логического сигнала
Выходной сигнал автомата, формируемый регистром, характеризуется стабильностью переходного процесса. Диаграмма, отражающая переключения в автомате с выходным регистром, представлена на рис. 14.
Рис. 14. Временная диаграмма переключения автомата с выходным регистром
Итак, недостатки автомата Мура с регистром на выходе следующие:
- Выходная реакция на входные воздействия, аналогично канонической модели Мура, проявляется на следующем такте, то есть имеет задержку на один такт.

- Необходимы дополнительные элементы, реализующие выходной регистр.
К преимуществам автоматов Мура с выходным регистром можно отнести:
- Наличие минимальной выходной задержки, связанной с переключением выходного регистра.
- Отсутствие нестабильности переходного процесса на выходе автомата.
- Отсутствие сквозного распространения сигнала через комбинационную схему от входа до выхода автомата.
- Простоту описания на языках описания аппаратуры — HDL (для описания автомата Мура с регистром на выходе достаточно одного блока process (CLK) для VHDL и always@ (posedge CLK) для Verilog).
Четвертый вариант логической организации автомата представлен конвейеризированной структурной схемой с регистровым выходом. Автомат с конвейеризированной структурой может функционировать подобно канонической модели Мура, однако в различных тактах одному внутреннему состоянию qs могут соответствовать различные выходные комбинации v0. Кроме того, автомат с конвейеризированной структурой имеет все преимущества автомата Мура с регистровым выходом. Структурная схема такого автомата показана на рис. 15.
Кроме того, автомат с конвейеризированной структурой имеет все преимущества автомата Мура с регистровым выходом. Структурная схема такого автомата показана на рис. 15.
Рис. 15. Конвейеризированная структурная схема автомата
В автомате с конвейеризированной структурой текущие выходные комбинации генерируются комбинационной схемой F на такт раньше своего появления на выходах V и зависят не от текущего состояния q(t) и текущей входной комбинации a(t), а от предыдущего состояния q(t–1) и предыдущей входной комбинации a(t–1), в некоторых же случаях — и от предыдущей выходной комбинации v(t–1).
Общий вид канонических уравнений для модели автомата с конвейеризированной структурой следующий:
Из структурной схемы и канонических уравнений ясно, что автомат с конвейеризированной структурой с технической точки зрения не может быть эквивалентным автомату Мили, так как в нем отсутствует зависимость текущих выходных значений v0 от текущей входной комбинации ai. Реакция такого автомата на текущие входные воздействия в отличие от модели Мили проявляется не в текущем такте (t), а в следующем такте (t+1), что принципиально при разработке цифровых устройств.
Реакция такого автомата на текущие входные воздействия в отличие от модели Мили проявляется не в текущем такте (t), а в следующем такте (t+1), что принципиально при разработке цифровых устройств.
С математической точки зрения автомат преобразует входное слово, составленное из элементов входного алфавита, в выходное слово, содержащее элементы выходного алфавита. Автомат с конвейеризированной структурой позволяет получить выходное слово, аналогичное автомату Мили, с задержкой на один такт. Следовательно, с позиций фундаментальной классификации такой автомат можно рассматривать как частный случай математической модели Мили. Согласно классификации, предложенной в работе [9], конвейеризированный автомат можно отнести к смешанным автоматам, сочетающим функциональность моделей Мура и Мили.
Конвейеризация рассматриваемой модели автомата заключается в добавлении к модели Мили выходного регистра, вносящего задержку выходного сигнала, а также возможность применения обратной связи по выходу, оказывающей воздействие на генерацию выходных комбинаций. Обратная связь по выходу образует выходной автомат, последовательно соединенный с автоматом состояний. Примером выходного автомата может служить синхронный триггер RS-типа или T-типа, управляемый генератором выходов F.
Обратная связь по выходу образует выходной автомат, последовательно соединенный с автоматом состояний. Примером выходного автомата может служить синхронный триггер RS-типа или T-типа, управляемый генератором выходов F.
Способы задания автомата с конвейеризированной структурой несколько отличаются от методов описания рассмотренных выше автоматов. В каждом такте такой автомат находится в определенном внутреннем состоянии и выдает на выход заданную алгоритмом выходную комбинацию. Обратная связь с выхода автомата необязательна и реализуется при использовании правил установки выходных сигналов в заданные состояния. В таких случаях текущие выходные комбинации сохраняются на выходе требуемое число тактов синхросигнала благодаря наличию обратной связи по выходу. При выполнении условия смены состояния выхода комбинационная схема F подает на регистр новую комбинацию.
Граф переходов для автомата с конвейеризированной структурой можно представить двумя способами. Первый способ предусматривает построение двух графов — графа переходов и графа выходов. В графе переходов вершины обозначаются овалами и соответствуют состояниям, а в графе выходов добавлены прямоугольные вершины, соответствующие выходным комбинациям (кроме специальной вершины RESET).
В графе переходов вершины обозначаются овалами и соответствуют состояниям, а в графе выходов добавлены прямоугольные вершины, соответствующие выходным комбинациям (кроме специальной вершины RESET).
Пример графа переходов автомата с конвейеризированной структурой показан на рис. 16а, а пример фрагмента графа выходов — на рис. 16б.
Рис. 16. Графический способ задания автомата с конвейеризированной структурой с помощью: а) отдельных графов переходов; б) графов выходов
Если граф переходов может быть составлен как для всех вершин одновременно, так и отдельными блоками, описывающими переходы между несколькими вершинами, то граф выходов имеет исключительно блочную структуру, в которой каждой вершине соответствует блок, описывающий получаемые из состояния qs этой вершины выходные комбинации v0.
Подобно графам описания автоматов Мили и Мура, в графах, описывающих автомат с конвейеризированной структурой, дугам с пометкой «иначе», else или default соответствует переход под воздействием любой входной комбинации, не входящей в список указанных явно комбинаций для данной вершины графа. Дуги, выходящие из вершины в единственном числе и не имеющие пометок, описывают безусловные переходы автомата.
Дуги, выходящие из вершины в единственном числе и не имеющие пометок, описывают безусловные переходы автомата.
Для описания функционирования автомата с обратной связью по выходам с помощью графа в прямоугольных вершинах следует указывать условия смены состояний отдельных выходных сигналов V(i).
Второй способ представления графа переходов автомата с конвейеризированной структурой предусматривает построение совмещенного графа, в вершинах которого наравне с текущими состояниями указываются текущие выходные комбинации. Пример совмещенного графа показан на рис. 17.
Рис. 17. Пример совмещенного графа для автомата с конвейеризированной структурой
Совмещенный граф структурирован по строкам, в соответствии с состояниями автомата, из которых осуществляются переходы, включая состояние асинхронной начальной установки — POR. Вершины, перечисляемые в одной строке совмещенного графа, обозначают одно состояние автомата при различных выходных комбинациях. Переходы в совмещенном графе могут быть указаны для группы вершин, описывающих одно внутреннее состояние, как показано для состояния q0 на рис. 17. Переходы между вершинами совмещенного графа могут осуществляться в объеме одной строки, потому что в автомате с конвейеризированной структурой возможно изменение выходных комбинаций без изменения состояния.
17. Переходы между вершинами совмещенного графа могут осуществляться в объеме одной строки, потому что в автомате с конвейеризированной структурой возможно изменение выходных комбинаций без изменения состояния.
Следует отметить, что построение совмещенных графов для реализации сложных алгоритмов затруднительно из-за обилия дуг между вершинами. В таких случаях можно прибегать к декомпозиции графа по строкам. Построение одной строки совмещенного графа не вызывает затруднений с расположением дуг и вершин.
Описание автомата с конвейеризированной структурой в табличной форме также удобно разделить на два этапа — составление таблицы переходов и заполнение таблицы выходов. Таблица переходов аналогична таблице автомата Мура без строки выходных значений (рис. 18а). Таблица выходов схожа с таблицей переходов, за исключением того, что в ее ячейках указываются следующие выходные комбинации вместо следующих состояний. Формат таблицы выходов показан на рис. 18б. При построении автомата с обратной связью по выходу в ячейках таблицы выходов для отдельных выходных сигналов V(i) указываются условия смены состояния.
Рис. 18. Табличный способ задания автомата с конвейеризированной структурой с помощью: а) отдельных графов переходов; б) графов выходов
Если все выходы в автомате управляются с использованием условий смены состояния (установки и сброса), то проще представить таблицу выходов в виде таблицы условий выходов. Пример такой таблицы приведен на рис. 19. В верхней строке таблицы условий выходов перечисляются выходные сигналы автомата, во второй и третьей строках — условия установки «лог. 0» и «лог. 1». В нижней строке таблицы приводится начальная выходная комбинация автомата, устанавливаемая вследствие асинхронного сброса или при включении питания. Ячейки таблицы могут заполняться формулами условий, HDL-кодами условий или формулами ДНФ, причем выполнение условия и «лог. 1» тождественны.
Рис. 19. Таблица условий выходов автомата с конвейеризированной структурой
Временные характеристики и форма выходных сигналов автомата с конвейеризированной структурой аналогичны оным для автомата Мура с выходным регистром.
Предложенная конвейеризированная структурная организация автомата в сравнении с классической схемой Мили имеет один недостаток, заключающийся в появлении выходной реакции на входные воздействия в следующем такте синхросигнала, иными словами через один такт. В то время как сигнал на любом из выходов автомата Мили может непосредственно зависеть от поданной входной комбинации в течение такта.
Преимущества автомата с конвейеризированной структурой аналогичны автомату Мура с регистровым выходом, кроме последнего свойства:
- наличие минимальной выходной задержки, связанной с переключением выходного регистра;
- отсутствие нестабильности переходного процесса на выходе автомата;
- отсутствие сквозного распространения сигнала через комбинационную схему от входа до выхода автомата;
- простота описания на языках VHDL и Verilog;
- возможность изменения выходной комбинации в зависимости от входных воздействий в течение разных тактов для одного состояния автомата.

Подводя итог, следует отметить, что наиболее универсальной с математической точки зрения является модель автомата Мили. Применительно ко многим техническим задачам предпочтительно использовать модель автомата с конвейеризированной структурой как обладающую большинством преимуществ.
Литература
- Алгебраическая теория автоматов, языков и полугрупп. Под ред. М. Арбиба. Пер. с англ. М.: Статистика, 1975.
- Pong P. Chu. RTL Hardware Design Using VHDL: Coding for Efficiency, Portability, and Scalability. John Wiley & Sons, Inc., 2006.
- Cummings C. E. The Fundamentals of Efficient Synthesizable Finite State Machine Design using NC-Verilog and BuildGates. Sunburst Design, Inc., 2002.
- Cummings C. E. State Machine Coding Styles for Synthesis. Sunburst Design, Inc., 1998.
- Golson S. State machine design techniques for Verilog and VHDL. Trilobyte Systems, 1994.
-
Stephenson J., Chen D., Fung R., Chromczak J. Understanding Metastability in FPGAs.
 Altera Corporation. March 2009.
Altera Corporation. March 2009. - Kelly R. IP Solutions for Synchronizing Signals that Cross Clock Domains. R&D Manager, Synopsys, Inc. Jan. 2009.
- Narain P., Cummings C. E. Clock Domain Crossing Demystified: The Second Generation Solution for CDC Verification. Real Intent, Inc., Sunburst Design, Inc., 2001.
- Поликарпова Н. И., Шалыто А. А. Автоматное программирование. СПб.: СПбГПУ. 2008.
|
Заглавная страница
КАТЕГОРИИ: Археология ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрации Техника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ? Влияние общества на человека Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. |
Стр 1 из 5Следующая ⇒ Цифровой автомат имеет некоторое конечное состояние, которое определяется его конструктивной особенностью. Цифровой автомат может иметь одно или несколько состояний. Под воздействием входного слова переходит из одного состояния в другое и выдаёт выходное слова. Выходное слова на выходе цифрового автомата в такте определяется в общем случае входным словом, поступившем в этот временной такт на вход автомата и внутреннем состоянием автомата, которое является результатом воздействия на автомат выходных слов в предыдущие такты. Опишите работу цифрового автомата. Цифровой автомат содержит память, которая содержит возможность фиксировать состояние автомата в предшествующие моменты времени. Состояние запоминающих элементов, определяющих состояние автомата, передаётся форме сигнала qj по цепям прямой связи на входы комбинационной схемы №2 и по цепям обратной связи на входы комбинационной схемы №1.
Что необходимо указать для однозначного задания цифрового сигнала (перечислить 5 пунктов)? Для обозначения значения цифрового автомата должны быть указаны:
1. Входной алфавит p=p1…,pn 2. Выходной алфавит s=s1,s2,…sn 3. Алфавит состояний Q=Q1,Q2…Qr 4. Начально состояние Q0 5.
Билет № 3 Архитектура современного компьютера. Архитектура персонального компьютера — компоновка его основных частей, таких как процессор, ОЗУ, видеоподсистема, дисковая система, периферийные устройства и устройства ввода-вывода. Основными аппаратными компонентами компьютера являются: основная память, центральный процессор и периферийные устройства. Для обмена данными между собой эти компоненты соединены группой проводов, называемой магистралью.
Рис. 1.1. Некоторые компоненты компьютера
Основная память используется для запоминания программ и данных в двоичном виде и организована в виде упорядоченного массива ячеек, каждая из которых имеет уникальный цифровой адрес. Как правило, размер ячейки составляет один байт. Выполнение различных операций с данными осуществляется изолированной частью компьютера, называемой центральным процессором (ЦП).
ЦП также имеет ячейки для запоминания информации, называемые регистрами. Их разделяют на регистры общего назначения и специализированные регистры. В современных компьютерах емкость регистра обычно составляет 4–8 байт. Регистры общего назначения используются для временного хранения данных и результатов операций. Для обработки информации обычно организовывается передача данных из ячеек памяти в регистры общего назначения, выполнение операции центральным процессором и передача результатов операции в основную память. Специализированные регистры используются для контроля работы процессора. Наиболее важными являются: программный счетчик, регистр команд и регистр, содержащий информацию о состоянии программы. Программы хранятся в виде последовательности машинных команд, которые должен выполнять центральный процессор.
Выполнение программы осуществляется следующим образом. Машинная команда, на которую указывает программный счетчик, считывается из памяти и копируется в регистр команд. Здесь она декодируется, после чего исполняется. После выполнения команды программный счетчик указывает на следующую команду. Эти действия, называемые машинным циклом, затем повторяются.
Назовите основную задачу кэш-памяти. Как работает кэш-память?В чем различие между одно- и двунаправленной кэш-памятью? 12345Следующая ⇒ Читайте также: Алгоритмические операторы Matlab Конструирование и порядок расчёта дорожной одежды Исследования учёных: почему помогают молитвы? Почему терпят неудачу многие предприниматели? |
|
Последнее изменение этой страницы: 2016-08-15; просмотров: 558; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia. |

 Определение реакций опор и моментов защемления
Определение реакций опор и моментов защемления
 На входы комбинационных схем и первой и второй поступают входные сигналы xn. Выходное слово цифрового автомата вырабатывается в комбинационной схемы №2, причём выходными переменными служат буквы входного слова икс энное, а так же состояние qj запоминающих элементов. Одновременность появления новых значений входного слова на всех входах цифрового автомата достигается с помощью тактирующих сигналов, обеспечивающих передачу информации с запоминающих элементов на входы комбинационной схемы одновременно с сигналами поступающими на её входы с других устройств.
На входы комбинационных схем и первой и второй поступают входные сигналы xn. Выходное слово цифрового автомата вырабатывается в комбинационной схемы №2, причём выходными переменными служат буквы входного слова икс энное, а так же состояние qj запоминающих элементов. Одновременность появления новых значений входного слова на всех входах цифрового автомата достигается с помощью тактирующих сигналов, обеспечивающих передачу информации с запоминающих элементов на входы комбинационной схемы одновременно с сигналами поступающими на её входы с других устройств. Функции перехода A=Q, x; функции выходов B=Q, x; однозначно определяющих зависимость состояний автомата в такте t+1 и выходного сигнала y(t) в такте t от состояния автомата Q(t) и входного сигнала x(t).
Функции перехода A=Q, x; функции выходов B=Q, x; однозначно определяющих зависимость состояний автомата в такте t+1 и выходного сигнала y(t) в такте t от состояния автомата Q(t) и входного сигнала x(t). Типовые операции над основной памятью – считывание и запись содержимого ячейки с определенным адресом.
Типовые операции над основной памятью – считывание и запись содержимого ячейки с определенным адресом. Каждая команда состоит из поля операции и полей операндов, то есть тех данных, над которыми выполняется данная операция. Весь набор машинных команд называется машинным языком.
Каждая команда состоит из поля операции и полей операндов, то есть тех данных, над которыми выполняется данная операция. Весь набор машинных команд называется машинным языком. su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь — 176.9.44.166 (0.007 с.)
su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь — 176.9.44.166 (0.007 с.) Цифровые печатные машины и производственные системы
Мы предлагаем самый широкий ассортимент цифровых печатных машин на рынке, состоящий из листовых цифровых печатных машин и производственных принтеров. Цифровые печатные машины с листовой подачей идеально подходят для графических коммуникаций и коммерческих поставщиков высокоскоростной печати больших объемов, включая издательское дело, транзакционную печать, прямую почтовую рассылку, упаковку и публикацию фотографий.
Цифровые печатные машины с листовой подачей идеально подходят для графических коммуникаций и высокоскоростной печати больших объемов поставщиков коммерческой печати. Делайте отпечатки, используя цифровые файлы в формате PDF, JPEG, BMP или других форматах, и получайте изображения высокого разрешения с высокой детализацией. Цифровые печатные машины позволяют создавать высококачественные приложения, ожидаемые вашими клиентами. Вот что предлагает цифровая печатная машина:
Цифровые печатные машины позволяют создавать высококачественные приложения, ожидаемые вашими клиентами. Вот что предлагает цифровая печатная машина:
- Высокое качество. Независимо от того, производите ли вы брошюру, флаер или буклет, цифровая печатная машина гарантирует стабильную печать по всем направлениям. Некоторые из наших цифровых печатных машин предлагают разрешение сверхвысокой четкости с в четыре раза большим количеством пикселей, чем стандартное, для потрясающих ярких цветов на различных носителях.
- Скорость. В зависимости от модели наши серийные принтеры могут печатать от 75 до 314 страниц в минуту.
- Персонализация. Цифровая печать идеально подходит для индивидуальных маркетинговых материалов, фотографий и других приложений. Улучшите управление цветом, внесите специальные улучшения или завершите работу с помощью различных встроенных опций финишной обработки для получения непревзойденных результатов.

- Автоматика. Многие бренды из нашей линейки цифровых печатных машин имеют встроенные передовые функции автоматизации, разработанные Xerox, чтобы повысить производительность и увеличить прибыль.
Приобретите новейшую коллекцию цифровых печатных машин Xerox уже сегодня.
Подробнее
Меньше
Представление в виде списка
Представление в виде сетки
ФильтрБыстрый просмотр
Сравнить
Xerox
® Iridesse ® Производственная печатная машинаОбеспечивает более блестящее будущее, обеспечивая большее «вау» воздействие на каждую печатную страницу за счет специальных цифровых улучшений.
- До шести встроенных печатных станций, которые печатают за один проход, на номинальной скорости, с точечной совмещением цветов
- Опциональные белые, прозрачные, серебряные, золотые и флуоресцентные розовые специальные сухие чернила для улучшений и расширения носителей Low Gloss Clear
- Full Width Array — мощная эксклюзивная технология Xerox, которая лежит в основе печатной машины и позволяет ускорить время выхода на производство
- Оптимальная производительность при работе со смешанными материалами, поддерживаемая Mixed Media Xceleration (MMX)
- Дополнительные устройства подачи большой емкости и встроенные решения для финишной обработки — финишная обработка буклетов в альбомной ориентации в режиме реального времени с использованием сверхдлинных листов (XLS)
Вплоть до
120 частей на миллион
Вплоть до
475 тыс. страниц
страниц
Обеспечивает более блестящее будущее, обеспечивая большее «вау-эффект» на каждую напечатанную страницу благодаря специальным цифровым усовершенствованиям.
Учить больше
Быстрый просмотр
Сравнить
Xerox Versant 280 Press
Многофункциональное, постоянно развивающееся, проверенное на практике устройство для создания прибыли. Переосмысление, чтобы предоставить все, что вам нужно, в печатной машине среднего размера.
- Опция номинальной скорости для всех материалов (ASRS) позволяет печатать на 25 % быстрее на всех материалах плотностью до 400 г/м²
- Поднимите автоматизацию до предела благодаря автоматическому качеству цвета с помощью простого щелчка, встроенному спектрофотометру и скорости ASRS с опцией Performance Package (PP)
- Чем больше, тем лучше с производственной печатью до 47 дюймов / 1,2 м в формате Ultra HD
- Привлеките к себе внимание с набором Xerox ® Adaptive CMYK+: яркие и флуоресцентные специальные тонеры добавляют к вашим приложениям золотой, серебряный, белый, прозрачный или флуоресцентный голубой, флуоресцентный пурпурный и флуоресцентный желтый
Вплоть до
80 частей на миллион
Вплоть до
80Kpages
Универсальный, постоянно развивающийся, проверенный на практике инструмент для создания прибыли.
 Переосмысление, чтобы предоставить все, что вам нужно, в печатной машине среднего размера.
Переосмысление, чтобы предоставить все, что вам нужно, в печатной машине среднего размера. Учить больше
Быстрый просмотр
Сравнить
Печатная машина Xerox Versant 4100
Универсальная печатная машина с еще более интеллектуальной автоматизацией для практически бесконтактного контроля качества
- Упрощение и автоматизация трудоемких задач, таких как выравнивание изображения и носителя, плотность, однородность, калибровка цвета и профилирование с нашим массивом полной ширины (FWA)
- Высококачественная печать с помощью тонера Xerox ® EA для невероятного разрешения Ultra HD 2400 x 2400 dpi и 10-битного RIP-рендеринга
- Универсальная подача листов шириной до 47 дюймов / 1,2 м и варианты финишной обработки для создания именно той печатной машины Versant, которая необходима для развития вашего бизнеса
- Xerox ® PredictPrint Media Manager обеспечивает мощное облачное управление запасами
Вплоть до
100 частей на миллион
Вплоть до
250 тыс. страниц
страниц
Новая универсальная печатная машина с еще более интеллектуальной автоматизацией для практически бесконтактного контроля качества
Учить больше
Быстрый просмотр
Сравнить
Печатная машина Xerox iGen 5
Проявите изобретательность благодаря усовершенствованной автоматизации, дополнительной пятой печатной станции и возможностям сверхдлинных листов до 35 дюймов/889 мм. стоимость и усилия

Вплоть до
150 частей на миллион
Вплоть до
1Mpages
Проявите изобретательность благодаря расширенной автоматизации, дополнительной пятой станции печати и возможностям сверхдлинных листов до 35 дюймов/889 мм.
Учить больше
Быстрый просмотр
Сравнить
Xerox
® Baltoro ® HF Inkjet PressInkonomics Amplified
- Открывает новые возможности применения на различных носителях с офсетным покрытием, включая глянцевые, благодаря дополнительному модулю ускорения цвета с чернилами High Fusion
- Лучшая в своем классе совокупная стоимость владения на базе Automated Intelligence Печатный модуль
- High Fusion со струйными головками Xerox High Fusion серии W обеспечивает истинно высокое разрешение 1200 x 1200 точек на дюйм
- Модульная масштабируемая платформа для максимальной защиты инвестиций
Вплоть до
300 частей на миллион
Вплоть до
3Mстраниц
Быстрый просмотр
Сравнить
Xerox Nuvera 120/144/157 Печатные машины
Потрясающее качество изображения
- 15 различных способов завершения вывода в линию или почти в линию
- от 44 до 300 г/м²
- Емкость подачи до 23 200 листов, загрузка во время работы
Вплоть до
157 частей на миллион
Вплоть до
2,2 Мб стр.
Быстрый просмотр
Сравнить
Печатные машины Xerox Nuvera 288/314
Формула идеальной производительности
- 15 различных способов завершения вывода в линию или рядом с линией
- от 44 до 300 г/м²
- Емкость подачи до 23 200 листов, загрузка во время работы
Вплоть до
314 частей на миллион
Вплоть до
4Mpages
Формула идеальной производительности
Учить больше
Быстрый просмотр
Сравнить
Принтер Xerox PrimeLink C9065/C9070
Революционная производительность.
 Новые бизнес-результаты.
Новые бизнес-результаты. - Цветное МФУ с поддержкой печати баннеров 13 x 26 дюймов (330 x 660 мм)
- Гибкая, готовая к производству послепечатная обработка и подача с рядом цифровых интерфейсов, подходящих для любой среды печати
- Исключительная надежность и качество изображения благодаря встроенным приложениям безопасности и рабочего процесса
- Привлеките к себе внимание благодаря технологии Xerox ® CMYK Plus: яркие и флуоресцентные специальные тонеры добавляют к вашим приложениям золотой, серебряный, белый, прозрачный или флуоресцентный голубой, флуоресцентный пурпурный и флуоресцентный желтый
Выход
Цвет
Размер бумаги
Таблоид+
Вплоть до
75 частей на миллион
в зависимости от модели
Вплоть до
50 тыс. страниц
страниц
Революционная производительность. Новые бизнес-результаты.
Учить больше
Быстрый просмотр
Сравнить
Серия Xerox PrimeLink B9100
Готов к производству, удобный для офиса черно-белый.
- Черно-белое МФУ с поддержкой печати баннеров 13 x 26 дюймов (330 x 660 мм)
- Простота использования и производительность в одном компактном устройстве
- Невероятная надежность с исключительным качеством изображения
- Бесконечно настраиваемый — параметры подачи, финишной обработки и цифрового переднего конца для любой среды печати
- Множество удобных для работы офисных функций, включая приложения для рабочих процессов и встроенную систему безопасности
Выход
Ч/Б
Размер бумаги
Таблоид+
Вплоть до
136 частей на миллион
в зависимости от модели
Вплоть до
700 тыс. страниц
страниц
Готов к производству, удобный для офиса, черно-белый.
Учить больше
Быстрый просмотр
Сравнить
Xerox ED95A/ED125
Копир/принтер Xerox ED95A/ED125 также доступен в продаже как копир/принтер Xerox D95A/D125 Pro. / СРА3
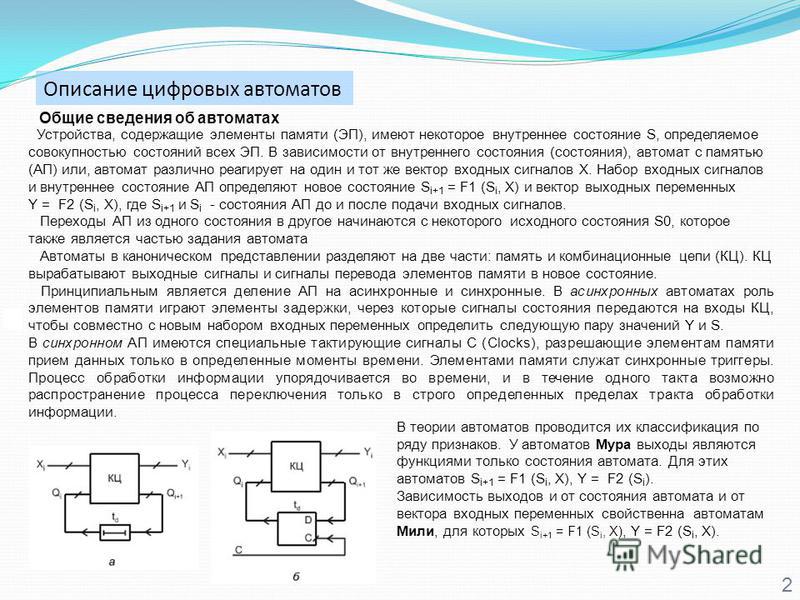 Для получения дополнительной информации обратитесь к торговому представителю Xerox.
Для получения дополнительной информации обратитесь к торговому представителю Xerox. Выход
Ч/б
Вплоть до
125 частей на миллион
Вплоть до
700 тыс. страниц
Копир/принтер Xerox ED95A/ED125 также доступен для продажи как копир/принтер Xerox D95A/D125 Pro
Учить больше
Быстрый просмотр
Сравнить
Xerox Color EC70
Принтер Xerox Color EC70 также доступен в продаже как принтер Xerox Color C60/C70 Pro
- Новая модель, изготовленная на заводе, разработанная с учетом экологических требований
- Цветное МФУ с поддержкой 13 x 19,2 дюймов / SRA3
- Копирование, печать, сканирование, электронная почта, дополнительный факс
- Лучше всего подходит для высокопроизводительных офисных, графических коммуникаций и быстрых, франчайзинговых или заводских принтеров
- Выход на рынок цифровой печати Beyond CMYK с набором Adaptive CMYK+ Vivid Kit: мерцающий золотой, сверкающий серебристый, прозрачный и ярко-белый тонер
Выход
Цвет
Размер бумаги
Таблоид+
Вплоть до
75 частей на миллион
Вплоть до
50 тыс.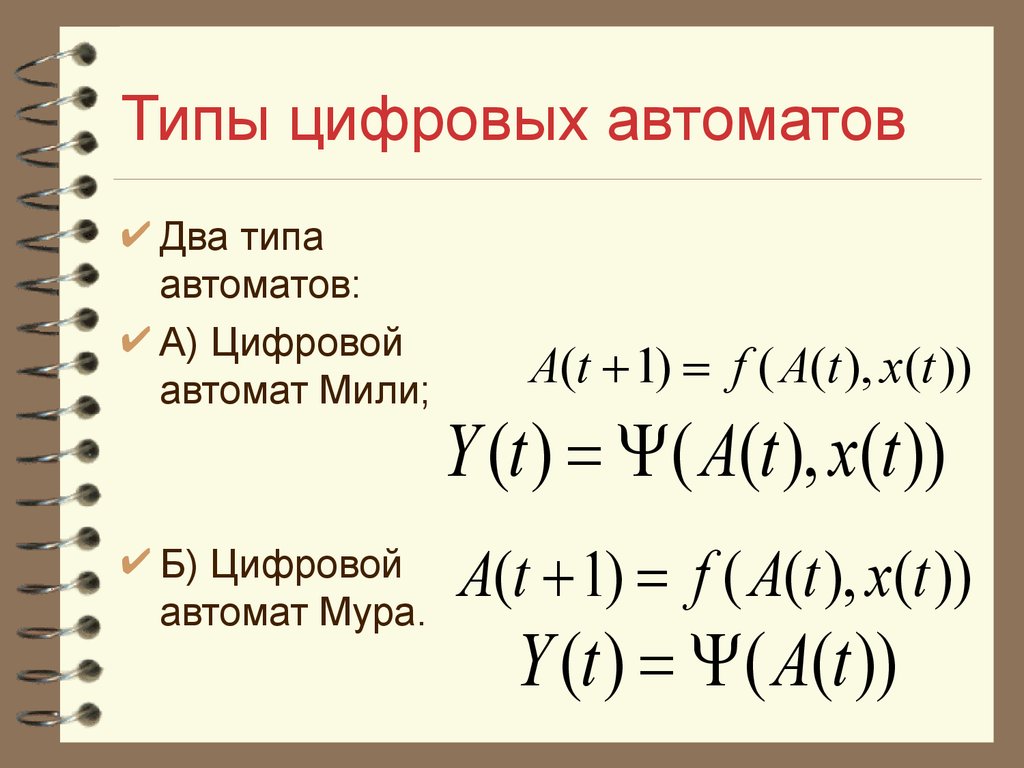 страниц
страниц
Принтер Xerox Color EC70 также доступен в продаже как принтер Xerox Color C60/C70 Pro
Учить больше
Как краудворкеры стали призраками цифровой машины
- Условия труда
- Особенность
- Выпуск от 24 февраля 2014 г.
С 2005 года Amazon помог создать одну из самых эксплуатируемых рабочих сил, которую никто никогда не видел.
5 февраля 2014 г.
Джефф Безос, генеральный директор и основатель Amazon (AP Photo/Reed Saxon)
В 2007 году у Стефани Костелло была скучная офисная работа с большим количеством простоев, которые она проводила в Интернете. Она вспоминает день, когда прочитала на MSN.com одну из тех статей, которые стали основным продуктом Интернета: как заработать дополнительные деньги в Интернете. Эти типы статей часто появляются в разделах мягких новостей на MSN, Yahoo и других сайтах, обычно с сообщением о том, что деньги остались на столе. Костелло была заинтригована перспективой разорвать скуку своего дня возможностью заработать немного дополнительных денег. Она зашла на сайт Mechanical Turk, где компании могут размещать крошечные задачи, а работники могут находить и выполнять их онлайн. Регистрация была бесплатной — никаких предварительных «инвестиций», что указывало на то, что на первый взгляд это не мошенничество. И она сразу начала зарабатывать деньги. Очень небольшие суммы денег.
Эти типы статей часто появляются в разделах мягких новостей на MSN, Yahoo и других сайтах, обычно с сообщением о том, что деньги остались на столе. Костелло была заинтригована перспективой разорвать скуку своего дня возможностью заработать немного дополнительных денег. Она зашла на сайт Mechanical Turk, где компании могут размещать крошечные задачи, а работники могут находить и выполнять их онлайн. Регистрация была бесплатной — никаких предварительных «инвестиций», что указывало на то, что на первый взгляд это не мошенничество. И она сразу начала зарабатывать деньги. Очень небольшие суммы денег.
Костелло — своего рода первопроходец. Она была одной из первых, кто присоединился к Mechanical Turk, первой краудфандинговой онлайн-платформе микротруда. В своем рассказе она звучит как алкоголик, описывающий свою первую выпивку. Сначала это было весело, а когда перестало быть чем-то веселым, все равно было полезно, хотя бы для того, чтобы пережить неделю. Но шесть лет спустя это стало серьезной проблемой, и не только для Костелло.
Механический турок — это инновация, стоящая за «краудворкингом», феноменом низкооплачиваемого виртуального труда, который заново изобрел сдельную работу в эпоху цифровых технологий. Созданная Amazon в 2005 году, она остается одной из центральных платформ — точнее, рынков, — где покупается и продается краудфандинговый труд. Целых 500 000 «краудворкеров» питают машину Mechanical Turk, а еще миллионы (никто точно не знает, сколько именно) питают сайты-конкуренты, такие как CrowdFlower, Clickworker, CloudCrowd и десятки более мелких. В любой день, в любую минуту эти работники выполняют миллионы крошечных задач для компаний, как огромных (вспомните Twitter), так и скромных. Хотя немногие из этих людей имеют хоть какое-то представление о готовом продукте своей работы, то, что они делают, помогает питать те части Интернета, которые большинство из нас считает само собой разумеющимися.
В настоящее время компьютеры очень хорошо справляются с определенными задачами, такими как выявление орфографических ошибок, обработка необработанных данных и расчет финансовых показателей. Однако они менее способны выполнять другие, такие как обнаружение положительного или отрицательного уклона в статье, распознавать иронию, точно читать текст с фотографии здания, определять, является ли что-то NSFW (небезопасным для работы) или различать среди неоднозначные результаты поиска. Вот тут-то и появляется «толпа». В текущей итерации краудворкинга людям поручаются те части работы, которые компьютер не может выполнить. Эта работа используется как для заполнения пробелов, так и для обучения компьютерного алгоритма, чтобы он лучше работал в будущем.
Сторонники краудворкинга часто превозносят его как начало новой эры труда. С рвением проповедников высоких технологий они представляют его как пространство, в котором процветают индивидуализм, выбор и самоопределение. «CrowdFlower и другие компании в индустрии краудсорсинга открывают возможности для людей, у которых никогда не было бы их раньше, и мы работаем в истинно эгалитарной манере, когда любой, кто хочет, может выполнять микрозадачи, независимо от их пола, национальности или социального положения. -экономический статус, и они могут делать это так, как они сами выбирают и уникальны для них», — утверждает Лукас Бивальд, генеральный директор CrowdFlower, в переписке по электронной почте. (CrowdFlower утверждает, что у нее «одна из самых больших, если не самая большая, доступная толпа»: около 100 000 сотрудников выполняют задачи в любой день.)
Но если вам посчастливилось быть работником низшего уровня, выполняющим черновую работу в Интернете, возникает другое видение. По мнению критиков, механический турок Amazon, возможно, создал самый нерегулируемый рынок труда из когда-либо существовавших. Внутри машины переизбыток труда, крайняя конкуренция между рабочими, монотонная и повторяющаяся работа, чрезвычайно низкая оплата и много мошенничества. В этом виртуальном мире неравенство сил в трудовых отношениях увеличивается во много раз, а «Нового курса» могло бы и не быть.
Как объяснила Мириам Черри, одна из немногих ученых-правоведов, занимающихся трудовым правом в виртуальном мире: «Эти технологии не позволяют людям реализовать свой потенциал; вместо этого они эксплуатируют людей». Или, как Бивальд из CrowdFlower сказал аудитории молодых технарей в 2010 году, в момент неконтролируемой прямоты: «До появления Интернета было очень трудно найти кого-то, усадить его на десять минут и заставить работать на вас, а затем уволить их после этих десяти минут. Но с технологиями вы действительно можете найти их, заплатить им небольшую сумму денег, а затем избавиться от них, когда они вам больше не нужны».
* * *
Amazon создала Mechanical Turk в 2005 году, спустя десятилетие своего превращения из книжного интернет-магазина в огромный виртуальный торговый центр. Даже на ранних стадиях Mechanical Turk был «проектом Джеффа», а это означает, что генеральный директор Amazon Джефф Безос проявлял к нему особый интерес и тесно сотрудничал с менеджерами проекта. К тому времени Безос и его команда уже усовершенствовали модель, которая превратила Amazon в гиганта технологического века: обслуживание клиентов, подрыв конкурентов и плохое обращение с работниками. С помощью Mechanical Turk они еще больше усовершенствовали этот подход, но с изюминкой: вместо того, чтобы эксплуатировать рабочую силу для продажи товаров жадной публике, они создали систему дешевой продажи самого труда для выполнения многих миллионов микрозадач.
Название «Механический турок» было не просто причудливым выбором Безоса. Первоначальный механический турок (также известный как «турок») был, казалось бы, новаторским изобретением: шахматная машина, заказанная императрицей Австрии Марией Терезией в первые дни промышленной революции. По внешнему виду он был похож на другие автоматы той эпохи — шкаф с манекеном внутри, выполнявшим какую-то функцию, обычно предназначенную для людей, — но этот был одет в «восточную» одежду, мало чем отличавшуюся от гадалки в 19 веке.Фильм 80-х Большой . Его мистическая, таинственная атмосфера должна была апеллировать к представлениям Западной Европы о Востоке; отсюда и название, под которым он стал известен.
Механический турок, казалось, обещал эру, когда автоматические устройства смогут достичь высот интеллектуальных достижений человека, и это было исключительно хорошо, почти столетие убеждая наблюдателей и претендентов, что машина может играть в шахматы. Однако на самом деле турок был не чем иным, как тщательно продуманной уловкой с участием мужчины или женщины, сидящих внутри шкафа с внутренней шахматной доской. Машина могла приблизиться к движениям человека, играющего в шахматы, но для того, чтобы сделать то, что машина сделать не могла, необходимо было иметь внутри человека.
Если бы это был просто розыгрыш, то Механический Турок был бы забыт как еще одна странность восемнадцатого века. Тем не менее, устройство идеально соответствовало закрадывающемуся убеждению, наполненному волнением и тревогой, что механический труд (и, возможно, механические умы) может заменить человеческий труд и свободу действий.
Соединенные Штаты переживают аналогичный период волнения и беспокойства, по крайней мере, с 1970-х годов. В то время как некоторые компании, такие как IBM, стремились создать суперкомпьютер, который может думать так же, как (или лучше) человека, Amazon вместо этого инвестировала в своего собственного Mechanical Turk — что-то, что выглядит как машина, но на самом деле за этим стоят люди. Amazon считала, что вместо разработки идеального компьютера она могла бы просто разработать способ для несовершенных компьютеров «интегрировать сеть людей непосредственно в свои процессы», как написала компания в своем заявлении SEC от 2005 года. При этом он открыл дверь в странный мир краудворкинга.
* * *
В 1911 году американский инженер Фредерик Тейлор выступил с докладом, в котором объявил, что природная лень рабочих и склонность к неполной работе являются «величайшим злом, от которого сейчас страдают рабочие как Англии, так и Америки». Его решением стала система «научного менеджмента», в которой работа разбивалась на мельчайшие повторяющиеся задачи и устанавливалась ограничение по времени. Совокупность этих задач затем станет основой для рабочего дня, и «те, кто не сможет подняться до определенного стандарта, увольняются, а на их место дается новый набор тщательно отобранных людей».
Почти столетие спустя Amazon нашла аналогичный подход к производительности труда. Тем не менее, в то время как гениальность Тейлора заключалась в том, чтобы нагрузить сборочную линию, сведя всю квалифицированную работу к крошечным микрозадачам, гениальность Mechanical Turk заключается в создании виртуальных сборочных линий.
Вот как это работает: работодатели (называемые «заказчиками») могут быть реальными людьми или компьютерной программой, запускающей сценарий, который автоматически передает любую задачу, которую он не может выполнить, толпе. Запрашивающие размещают микрозадачи (называемые «задачами человеческого интеллекта» или HIT) на веб-сайте Amazon Mechanical Turk и предлагают необоротные контракты со ставкой «бери или не бери» за каждую HIT. Туркеры (официально именуемые «Провайдеры») снова и снова выполняют только небольшие микрозадачи, редко получая представление о целом. Используя поиск по ключевым словам для HIT, профессор Нью-Йоркского университета Панайотис Ипейротис обнаружил, что среди самых многочисленных HIT были сбор данных, транскрипция, поиск, тегирование, просмотр контента, категоризация и другие подобные задачи.
Однако HIT может быть любой задачей, которая может быть передана на аутсорсинг онлайн. Многие функции Интернета, которые мы считаем само собой разумеющимися, появились благодаря платному краудворкингу. К ним относятся более эффективные результаты поиска, транскрипции аудио и видео, достоверная местная бизнес-информация, маркетинговый спам и другие аспекты Интернета, которые только кажутся существующими. Краудворкеры также занимаются задачами, которые могут сделать жизнь некоторых людей неизмеримо лучше, например, почти мгновенное предоставление слепым людям информации об их окружении с помощью смартфона и подходящего приложения.
HIT обычно включает в себя набор инструкций, некоторые из которых довольно сложные, которые необходимо прочитать и понять перед выполнением задачи. Заявители могут устанавливать квалификационные требования. Например, они могут ограничить доступ к тем, у кого есть «Master Qualifications» — обозначение, которое Amazon присуждает по своему усмотрению — которые некоторые получили после выполнения не менее 50 000 HIT с исключительно высоким уровнем одобрения. Или Заявитель может исключить определенных работников, например, из Индии, потому что в мире онлайн-краудворкинга они считаются низшими работниками.
Заявители могут использовать такие широкие исключения, потому что Закон о гражданских правах не касается этих работников. На самом деле, большинство с таким трудом завоеванных трудом средств защиты двадцатого века не распространяется на турок. Некоторые критики опасаются, что нарушаются даже запреты на использование детского труда. Это связано с тем, что неясно, насколько хорошо некоторые сайты соблюдают требования, согласно которым пользователи должны быть старше 18 лет для выполнения HIT. Более того, многим краудворкерам платят игровыми кредитами, которые могут быть использованы для намеренного привлечения детей к выполнению дешевой рабочей силы. Плата, предлагаемая за HIT, варьируется от нуля до нескольких долларов до оплаты в виртуальной валюте, при этом большинство HIT находятся в нижней части шкалы. В результате, по оценкам, средняя заработная плата турок составляет примерно 2 доллара в час. За доступ к этому нерегулируемому пулу рабочей силы Amazon взимает 10-процентную комиссию с запрашивающих.
Домашние коллективы часто проводятся людьми, не имеющими других занятий. Некоторые утверждают, что низкая заработная плата может быть результатом давнего гендерного неравенства в обществе. Подавляющее большинство американских турок — женщины, и есть некоторые признаки того, что многие из них работают по уходу или ухаживают за пожилым родственником или маленьким ребенком.
Рэйчел Джонс из Миннесоты является примером турок-работниц по уходу. Ее обучали помогать нейрохирургам, но после травмы шеи и операции она больше не могла работать в этой области, требующей физических усилий. Кроме того, Джонс хотела оставаться дома и заботиться о своих детях, пока ее партнер работал вне дома. Теперь она «полный рабочий день» Turker, и после нескольких лет, в течение которых она получила три квалификации Masters и выполнила 110 000 HIT, она смогла зарабатывать примерно 8 долларов в час. Когда ее спросили, что она думает о Теркинге, она ответила: «Мне это очень нравится». Она признает, что «иногда бывает очень тяжело, и ты ищешь и ищешь, а платных ХИТов просто нет». Она хотела бы, чтобы зарплата была увеличена, но она также опасается, что любое значительное повышение может разрушить мир краудворкинга. Если бы это произошло, она не уверена, какую работу она могла бы выполнять, что позволило бы ей оставаться дома со своими детьми.
Туркеры относятся к категории независимых подрядчиков, что означает, что они не имеют законного права на минимальную заработную плату, оплату сверхурочных, компенсацию работникам, страхование по безработице или различные другие установленные законом меры защиты, которые распространяются на сотрудников. В многостраничном соглашении об участии, с которым все Turkers должны согласиться перед входом на сайт, указано, что Turker не является ни сотрудником запрашивающего, ни Mechanical Turk. Amazon определяет свою роль как ограниченную «возможностями платежного процессора по содействию транзакциям между запрашивающими сторонами и поставщиками» и утверждает, что «не несет ответственности за действия любого запрашивающего лица или поставщика». Его соглашение предупреждает: «Как Заявитель или Поставщик, вы используете Сайт на свой страх и риск».
После того, как Amazon напомнила ему об отсутствии юридической ответственности, один обиженный Туркер был сбит с толку тем, как компания может получать прибыль от поведения, которое она принимает, при этом заявляя, что не несет никакой ответственности: «Это все равно, что сказать, что кто-то управляет рынком рабов на моей территории. , и они платят мне, но я не несу никакой ответственности».
* * *
Кроме горстки компаний, которые управляют краудворкинговыми платформами, никто точно не знает, кто составляет толпу. Самое последнее исследование демографии турок, проведенное в 2010 году, показало, что подавляющее большинство турок — 57 процентов — были американцами, а индийцы заняли второе место с 32 процентами рабочей силы. Американские турки, как правило, были высокообразованными: 63 процента имели высшее образование по сравнению со средним показателем по стране в 25 процентов. Они были молоды, средний возраст 30 и 69 лет.процентов были женщины. Пул рабочей силы значительно вырос с тех пор, как Amazon создала платформу, и рынок с чрезвычайно низкой заработной платой, похоже, зависит от конкуренции среди переизбытка рабочих.
Люди занимаются турками по разным причинам. Несколько лет назад Ипейротис разместил этот вопрос как ХИТ на сайте Mechanical Turk и получил самые разные ответы, например: «Это убивает время, когда мне скучно и беспокойно» на потребность в заработке, чтобы свести концы с концами. Один человек, с которым я разговаривал, объяснил, что он каждый день тратит на работу в офисе ровно столько, сколько нужно, чтобы заплатить за бутерброд в Subway. Однако существует значительная группа рабочих, которые полагаются на Mechanical Turk как на основной источник дохода.
Судя по ограниченным демографическим данным туркеров, история Стефани Костелло слишком обыденна. Костелло живет в трейлере на окраине пустынного городка на юго-западе. Ей 50 лет, и она имеет степень младшего специалиста по сестринскому делу, но не может найти подходящую работу медсестры. В 2007 году Костелло работал на скучной офисной работе, а в периоды затишья подрабатывал, проводя онлайн-опросы на сайте Mechanical Turk. Когда она потеряла работу в начале рецессии 2008 года, она полностью посвятила себя Тёркингу, а часто и дольше. То, что начиналось как источник дополнительных денег, внезапно превратилось в ее основной источник дохода. Согласно исследованию 2010 года, ситуация Костелло может быть репрезентативной примерно для каждого восьмого турка в Америке или каждого пятого во всем мире.
Костелло описывает постоянную турку как «пир или голод», но годы турки изменили ее взгляд на пир. В феврале 2013 года она работала около шестидесяти часов в неделю, занимаясь поиском и выполнением HIT, и зарабатывала около 150 долларов в неделю — и это был праздник. В следующем месяце она не смогла найти столько «хорошо оплачиваемых» HIT и зарабатывала всего около 50 долларов в неделю. Она описывает, как часто не спит всю ночь с открытым экраном Mechanical Turk, потому что, когда люди публикуют большое количество HIT, они уходят быстро.
Термин «хорошо оплачиваемый» стал относительным. Костелло отказывается работать за 60 центов или даже 1,20 доллара в час, потому что такие низкие суммы «более недостойны, чем попрошайничество». Однако при 2 долларах в час она начинает уклоняться и признает, что часто работает за эту плату. Даже те, кто описывает приличный заработок, обычно говорят о заработке 6 долларов в час, что все еще ниже федеральной минимальной заработной платы.
История Костелло о том, что он штатный туркер, едва держащийся на плаву, слишком знакома в мире краудворкеров. Однако Костелло считает, что однажды Туркинг может измениться к лучшему, особенно с организацией рабочих. Другие, такие как Лаура Хендерсон (псевдоним, чтобы защитить ее частную жизнь), не видят выхода. До 2004 года Хендерсон работал техническим тренером на северо-западе Тихого океана. Когда эта работа иссякла, она получила степень бакалавра и присоединилась к Teach for America, где ей поручили преподавать математику в школе в Южном Бронксе в Нью-Йорке. Хендерсон был назначен в школу в середине года, чтобы заменить любимого учителя, и у него сразу же возникли проблемы. Она потеряла работу и оказалась одна в новом городе, в долгах из-за опыта TFA и в поисках еще одной карьеры.
Какое-то время она получала пособие по безработице, но во время кризиса женщине старше 50 лет было трудно найти постоянную работу. Итак, Хендерсон начал турку. «Это звучало очень интересно, когда я услышал об этом — вау, краудворк. Я всегда была в сотрудничестве и совместной работе, и части были больше, чем целое», — говорит она. Но ее энтузиазм быстро угас. «Когда я начал этим заниматься, я понял, что зарплата дерьмовая. Мне повезло, что я получаю 2 доллара в час».
Когда я впервые взял у нее интервью, Хендерсон снимала небольшую комнату в Бронксе и называла себя «бедной и подавленной». В дополнение к ее заработку в качестве краудворкера она получала 200 долларов в месяц в виде талонов на питание и 180 долларов в месяц в виде социального обеспечения. Она была слишком бедна, чтобы иметь банковский счет, поэтому ей приходилось тратить свои доходы от Mechanical Turk на Amazon, который она называла «фирменным магазином». Она знала о жестокой иронии судьбы, что ее поставками, вероятно, занимался эксплуатируемый рабочий где-то на складе Amazon.
В тот день, когда я разговаривал с Хендерсон, она сказала мне, что «разгневана» и недовольна тем, что ей только что отказали в 5-долларовом HIT (она считала это несправедливо), и предупредила, что в результате она может быть невнятной. Хендерсон признала, что 5 долларов могут показаться не большими деньгами, но добавила, что жизнь впроголодь под анонимностью Механического Турка сделала ее «дикой».
Хендерсон описал мошенничество как относительно обычное явление. Заявители могут сохранить рабочий продукт независимо от того, официально ли они «принимают» или «отклоняют» работу. В результате многие турки жаловались на то, что им отказывают в выплате не по их вине.
Хендерсон пошел дальше большинства. Она сказала, что сначала пыталась рассердить других турок из-за мошенничества, но обнаружила, что ее негодование, похоже, не разделяют. «В наши дни это хлеб и зрелища», — сказала она. «Люди больше не злятся. Я злюсь, но я не могу заставить других людей злиться».
Затем Хендерсон подала жалобы в Better Business Bureau, Федеральную торговую комиссию, Генеральную прокуратуру Нью-Йорка и всем, кто, по ее мнению, мог иметь юрисдикцию в отношении этого вопроса. Однако, поскольку часто невозможно узнать личность данного Заявителя, Хендерсон также пошел на Amazon.
В длинном ответе юристов Amazon компания объяснила, что не несет юридической ответственности за то, что Хендерсону не выплачивается минимальная заработная плата или вообще не выплачивается за выполненное задание. В письме роль Amazon описывается просто как создание рынка и предоставление возможности Заявителям и Туркерам свободно заключать контракты. В письме указано, что Amazon не разрешает споры между сторонами и не предоставляет никаких гарантий; в нем также утверждается, что компания освобождается от всех обязательств, когда каждая сторона ставит отметку в ячейке, соглашаясь с соглашением об участии. Генеральная прокуратура Нью-Йорка переслала письмо Хендерсону и заявила, что в настоящее время ничего не может сделать.
* * *
Лилли Ирани не согласен с описанием Amazon своей роли на рынке. Вместе с Сикс Зильберман она является одним из разработчиков Turkopticon, плагина для интернет-браузера и форума, который позволяет Turkers оценивать запрашивающих и обмениваться важной информацией о них, чтобы «СООБЩАТЬ и ИЗБЕГАТЬ теневых работодателей». Ирани утверждает, что одна из фундаментальных проблем с Mechanical Turk и другими сайтами краудворкинга заключается в том, что они не являются нейтральными торговыми площадками, как утверждают сайты, а построены на по своей сути эксплуататорской модели, которая дает привилегии работодателям.
Одним из примеров является то, что Туркер не имеет рычагов влияния в трудовых отношениях — дисбаланс, который особенно заметен в системе, позволяющей Заявителю либо «принять», либо «отклонить» работу Туркера. Эти термины заключены в кавычки, потому что, как упоминалось ранее, Заявитель видит и сохраняет рабочий продукт независимо от того, какой выбор он делает. Если Заявитель «принимает» работу, он получает рабочий продукт и платит Turker. Если Заявитель «отклоняет» работу, он получает рабочий продукт, не платя Turker. Запрашивающий не обязан указывать причину отказа, и Turker не может ничего сделать, чтобы оспорить решение, кроме как запросить и надеяться на ответ.
«Отклоняя» работу, Заявитель не только лишает Туркера оплаты, но и влияет на репутацию Туркера в сети. Туркеры якобы анонимны, идентифицируются только по длинной цепочке цифр и букв, поэтому все, что у них есть, — это их репутация механического турка. Костелло описывает, как в начале она делала тысячи HIT любого типа просто для того, чтобы повысить свой рейтинг одобрения, только чтобы понять, как легко его можно сбить. «Если у вас рейтинг одобрения 99,8 %, а затем вы работаете на какого-то фургона, который отвергает 500 ваших HIT, вы пропали», — говорит она. «Потому что для каждого отказа вы должны получить 100 одобренных HIT, чтобы восстановить свой рейтинг. Вы знаете, сколько времени это занимает? Это может занять месяцы; это может занять годы».
Из-за этой рутины онлайн-форумы и рабочие сайты, такие как Turkopticon, TurkerNation, mturkforum, CloudMeBaby и Reddit, стали основными местами, где краудворкфорс может рассказать об условиях своей работы. Однако анонимность Turking в сочетании с передовыми возможностями Интернета часто делала эти форумы не только контрпродуктивными для организации, но и продуктивными для навигации в мире краудворка.
TurkerNation является одним из старейших форумов, и многие Turker жаловались на то, что их произвольно забанили на сайте по прихоти модератора Spamgirl. (Полное раскрытие: во время исследования этой статьи я был забанен на сайте вскоре после регистрации.) Spamgirl назвала себя «Хоффа турок! Пытаюсь помочь людям». Она разрешила разместить на сайте ветку о «Туркоптиконе», которая тогда находилась на ранней стадии, прежде чем закрыть ее по неизвестным причинам. Рэйчел Джонс описывает, как ее забанили за конфликт в Твиттере с модератором TurkerNation.
Другие сайты, такие как mturkforum и Turkopticon, более дружелюбны, но некоторые жалуются на то, что форумные сообщества мало поддерживают попытки улучшить условия или организовать. Неясно, может ли какой-либо онлайн-форум служить основой для того, чтобы работники находили общее дело и требовали улучшения условий труда, особенно когда рабочая сила анонимна и постоянно меняется — или, говоря языком сторонников краудворка, «гибкая».
Некоторые благонамеренные реформаторы считают великодушных работодателей единственным источником изменений, которые сделают жизнь краудворкеров лучше. Эта точка зрения была полностью продемонстрирована на прошлогодней конференции, когда восемь выдающихся исследователей выступили с важным докладом под названием «Будущее краудсорсинга», посвященным вопросу: «Можем ли мы предвидеть будущее коллективного рабочего места, в котором мы хотели бы, чтобы наши дети участвовали?» ?» Из множества идей, появившихся в этой статье, ни одна не включала в себя какую-либо самопомощь или организацию работников.
Эта точка зрения в настоящее время оспаривается в том, что может оказаться основополагающим коллективным иском, поданным в федеральный суд Калифорнии. Кристофер Оти и Мэри Грет от имени себя и «Самой большой рабочей силы в мире» утверждают, что краудворкеры — это не просто подрядчики, а сотрудники краудворкинговой компании. Оти и Грет выполняли «простые повторяющиеся онлайн-задачи в интересах CrowdFlower». За их усилия им платили меньше, чем от 2 до 3 долларов в час, которые, по словам генерального директора CrowdFlower, зарабатывают его работники. Оти и Грет утверждают, что рабочие зарабатывают от 1 до 2 долларов в час и что некоторые из них получают компенсацию в виде кредитов онлайн-игр, виртуальных денег и расширенных возможностей видеоигр.
Класс может насчитывать до 4 миллионов членов, что потенциально делает его одним из крупнейших коллективных исков в истории занятости. Если истцы выиграют дело, они будут классифицированы как сотрудники краудворкинговой компании, а не как подрядчики, и, следовательно, будут иметь право на множество льгот и средств защиты, которые получают сотрудники. К ним относятся минимальная заработная плата и сверхурочные, защита от дискриминации, защищенное законом право на организацию профсоюза, компенсация работникам за травмы, пособие по безработице при увольнениях, определенные меры защиты осведомителей и другие.
Дело преодолело несколько из многих предварительных препятствий, стоящих перед таким амбициозным судебным процессом; однако, когда эта статья готовится к печати, на утверждение судьи было подано ходатайство об урегулировании спора. Если судья сочтет, что условия мирового соглашения справедливы для всех членов класса, то, вероятно, в другом деле придется рассматривать вопрос о том, имеют ли миллионы краудворкеров право на защиту и зарплату наемных работников.
Мириам Черри, которая организовывала совещание amicus группы профессоров трудового права перед ходатайством об урегулировании, опасается, что судья может не понять краудворк и просто объявить, что рабочие являются подрядчиками. Тем не менее, она также опасается, что судья или законодательный орган просто отменит краудворк. «Существует множество способов, как что-то может пойти хорошо, а что-то пойти не так, и именно такие случаи, как CrowdFlower, действительно говорят нам, будут ли они идти правильно или что-то пойдет не так», — говорит Черри.
Со своей стороны, Джонс опасается возможности того, что судья вынесет решение против CrowdFlower и постановит, что она и другие, подобные ей, являются наемными работниками. «Меня это пугает, — говорит она. «Я завишу от этой системы. Если у Crowdflower дела пойдут не так, это действительно может сокрушить рынок краудворкинга».
Хендерсон не мог дождаться разрешения этого судебного процесса. Недавно она перестала заниматься турками, потому что заработная плата слишком мала, чтобы поддерживать даже ее жизнь в дешевой комнате в Южном Бронксе. После четырех месяцев погони за HIT она описала себя как «слишком уставшую, чтобы терпеть турки за 2 доллара в час».
В середине ноября Хендерсон исполнилось 53 года, а через две недели, 1 декабря, она переехала в приют для бездомных. Предположительно в ней нет Wi-Fi, так что она не смогла бы повернуться, даже если бы захотела.
Цифровая электроника в волокнах позволяет делать выводы на основе машинного обучения на основе ткани
Введение
Мобильные цифровые вычислительные системы, также известные как носимые устройства, все чаще используются для сбора физиологических параметров с поверхности человеческого тела. Принятие было ограничено 1 необходимостью убедить потенциальных пользователей нести с собой дополнительный объект, что привело к появлению лишь небольшого числа очень специфических форм-факторов. В общих чертах, носимая система обычно включает в себя довольно жесткое устройство, размещенное на небольшой площади контакта, и определенные положения на теле, которые, в свою очередь, ограничивают тип данных, к которым эти устройства могут получить доступ. Не вдаваясь в семантику, следует отметить, что термин «носимый» сам по себе не применяется к большинству продуктов, которые мы на самом деле носим и которые называются одеждой. Обычно они изготавливаются из ткани и имеют априорное преимущество в том, что они находятся в физическом контакте с большими площадями поверхности человеческого тела, и уже являются фактом жизни для всех слоев общества. Как таковые, они представляют значительную возможность 2,3 для сбора, хранения и, возможно, даже анализа соответствующих неиспользованных физиологических переменных. Несмотря на уникальные возможности для решения этой задачи, возможности придания тканям цифровых атрибутов ограничены.
Чтобы включить сенсорные функции, память и другие цифровые функции 4,5,6 , сохранив при этом традиционные качества, которые делают ткани вездесущими, необходимо рассмотреть внутренние подходы к приданию цифровых функций тканевым конструкциям. Волокна, являющиеся основными строительными блоками тканей, кажутся естественными кандидатами по сравнению с другими подходами 9.0043 7,8 . В последние годы появился ряд волокон со сложными функциями, что привело к распознаванию различных модальностей 9,10,11,12,13 , оптической связи 14,15 , приводов 16 и т. д. 17, 18 . Однако эти волокна без исключения являются аналоговыми и не содержат цифровых компонентов. Кроме того, до сих пор каждое функциональное волокно работало как одно параллельное тандемное устройство. При этом ограничении единственным способом достижения нескольких функций было использование нескольких волокон, что увеличивает необходимое количество точек доступа к электричеству, подвергая систему проблемам экологической и механической надежности.
Это исследование направлено на введение пряди волокна с рядом отличительных характеристик: во-первых, введение цифровых компонентов в прядь гибкого полимерного волокна. Во-вторых, снять ограничение на одно волокно и одно устройство, чтобы одно волокно могло обеспечивать масштабируемое множество различных адресуемых цифровых функций. В-третьих, обеспечить доступ к ансамблю устройств внутри волокна через один соединительный порт на конце волокна. В-четвертых, сенсорная информация, собранная волокном, может храниться в самом волокне. Наконец, мы стремимся хранить в волокне не только сенсорные данные, но и нейронную сеть, обученную выводить из них контекст.
Результаты
Изготовление цифровых волокон
Вытянутые волокна содержат непрерывные домены, что дает возможность создавать однородные проводящие шины, соединенные с устройствами, встроенными по всей длине волокна. Это позволяет сократить количество дискретных электрических соединений, которые являются основным источником механической и электрической уязвимости. Здесь сотни индивидуально адресуемых цифровых устройств электрически соединяются на месте во время процесса протяжки волокна (т. е. , а не после розыгрыша), при этом все устройства доступны на одной оптоволоконной цифровой шине связи. Чтобы сконструировать это волокно, сотни квадратных кремниевых микрочипов, каждый из которых имеет четыре угловых контактных площадки, сначала помещаются в пазы в полимерной заготовке. Каждая стружка размещается под углом 26,56 ° по отношению к оси волокна (рис. 1а), а пазы в преформе фрезеруются в соответствии с точными размерами стружки (рис. 1б и дополнительный рис. 1) (более подробную информацию см. в разделе «Методы»). Информация). Этот особый угол обеспечивает индивидуальное подключение четырех компланарных и коаксиальных вольфрамовых проводов к четырем отдельным портам питания и сигнала на каждом чипе. Крайне важно, чтобы этот угол сохранялся в угловом окне от 24,05 ° до 28,24 ° во время термической вытяжки, чтобы обеспечить постоянный контакт между четырьмя осевыми проволоками и отдельными контактными площадками (рис. 1c) (см. Дополнительный рис. 2 для получения этого критического диапазона углов). Традиционным ограничением подхода термического волочения, которое усложняет наше изготовление, является то, что вязкий поток при растяжении стремится выровнять дискретные частицы с продольной осью 19 волокна, чтобы уменьшить их гидродинамическое поперечное сечение, в то время как уменьшение вязкости жидкости для уменьшения сдвига может привести к нестабильности поверхности жидкости, что приведет к случайным возмущениям положения устройства. Для достижения сохранения угла поворота идентифицировано окно процесса вязкого течения (напряжение вытяжки при 50–100 грамм/мм 2 ), которое сохраняет угловую ориентацию компонентов твердых частиц с высоким позиционным (микромасштабом) и угловым (± ~2°) точность на протяжении всего процесса спуска.
a Термическое волочение преформы цифрового волокна путем подачи токопроводящих вольфрамовых проволок в пустые каналы. На уровне преформы вольфрамовые (W) проволоки расположены далеко друг от друга с полимерным барьером, разделяющим устройство и проволоки. На вставке показано схождение четырех вольфрамовых (W) электродов к четырем контактным площадкам электрических устройств в области сужения перехода заготовка-волокно. б (слева) Оптическая микрофотография повернутых устройств, встроенных в пазы преформы, фрезерованные под критическим углом 26,56° относительно оси преформы. (справа) Схема поперечного сечения преформы, содержащей три слоя (жесткий ПК/мягкий ПММА/жесткий ПК). Наличие твердого поликарбоната обеспечивает сжатие внутрь, что позволяет W-электродам прорваться через барьер из мягкого полиметилметакрилата и войти в контакт с электрическими контактными площадками устройства. Подкладочная проволока используется для сжатия устройства на стороне, противоположной электродным проволокам, и для предотвращения наклона устройства по длине волокна. c (слева) Схема вытянутого волокна с сохранением поворота встроенных устройств под критическим углом 26,56°, что позволяет электрическим площадкам контактировать с четырьмя параллельными проводами без короткого замыкания. Распространение вольфрамовых проводов в области устройства также учитывается, чтобы провода совпадали с этими электрическими контактными площадками. (справа) Схема поперечного сечения цифрового волокна в области устройства, показывающая электрические контакты между устройством и проводами. d (слева) Фотография катушки, содержащей непрерывное цифровое волокно со 100 встроенными устройствами. (справа) Увеличенное оптическое изображение массива волокон, показывающее, что все цифровые устройства повернуты на критический угол и подключены к проволочным электродам. (внизу) Фотография, показывающая сравнение размера волокна и монеты (пенни). e Иллюстрация термически вытянутого цифрового волокна, инкапсулирующего чипы с различными функциями, такими как память или датчики. Каждый из чипов представлен уникальным и другим цифровым адресом в шестнадцатеричном формате (0xNN). Четыре провода в волокне выполняют разные функции: сигнальная линия для обмена данными между оптоволоконными устройствами, линия синхронизации для регулирования синхронизации сигналов связи, линия заземления и линия питания.
Изображение в полный размер
Во время термического волочения четыре вольфрамовые проволоки диаметром 25 мкм подал в заготовку. По сравнению с предыдущими работами 9,10,11 по термическому волочению металлического припоя или токопроводящих композитов этот подход к использованию вольфрамовых проволок приводит к более высокой осевой проводимости по длине волокна. Важно отметить, что заготовка специально сконструирована таким образом, что по мере того, как элементы от заготовки до волокна уменьшаются в размерах в процессе вытягивания, эти провода сближаются до тех пор, пока они не соприкоснутся с нижележащими устройствами. Отметим, что для того, чтобы четыре провода установили электрический контакт с кремниевыми чипами, провода должны пройти через изолирующий полимерный барьер между проводами и устройствами, присутствующими в заготовке (рис. 1б). Чтобы решить эту проблему, в качестве барьера между проводами и устройствами (рис. 1b, c) выбран более мягкий полимер, полиметилметакрилат (ПММА), который имеет более низкую вязкость при температуре вытяжки. Во время перехода преформы в волокно эта комбинация мягкого полимера между слоями жесткого полимера заставляет более твердую внешнюю поликарбонатную (ПК) оболочку сжимать четыре электродных провода через более мягкий барьер из ПММА до тех пор, пока провода не войдут в электрический контакт с контактными площадками устройства. . Дополнительная проволока (50 мкм) также подается под основу устройства в качестве поддержки для выравнивания устройств по длине волокна, при этом добавляется сжимающая сила, направленная вверх от нижней части устройства к четырем проводам. Этот провод обеспечивает механическую поддержку устройства в волокне, не имеет электрического контакта с устройством и остается в волокне после протяжки. Этот двойной подход, состоящий из комбинации мягкого и твердого полимера и подложки, обеспечивает прочные электрические контакты между проводами и устройством. После вытягивания волокно содержит взаимосвязанную последовательность вращающихся устройств, каждое из которых имеет четыре незамкнутых электрических соединения с четырьмя электродными проводами, длина волокна достигает десятков метров (рис. 1d).
Степень контроля процесса указана на вставке к рис. 1d, на которой показан массив волокон с внутренними устройствами, повернутыми под идеальным углом 26,56 °, с четырьмя проводами диаметром 25 мкм, имеющими электрический контакт с четырьмя отдельными контактными площадками устройств ( диаметром ~100 мкм) без замыкания между проводами. На дополнительном рисунке 3 показан массив волокон со встроенными цифровыми устройствами меньшей ширины. Как показано в сравнении размеров с монетой на вставке к рис. 1d, устройства и соединения полностью упакованы в защитную полимерную оболочку, при этом большая часть тела волокна имеет ширину ~ 0,3 мм. Расстояние между устройствами в волокне (d волокно ) определяется двумя факторами: расстоянием между устройствами в преформе (d расстояние ) и коэффициентом вытяжки (r), который определяется отношением диаметра преформы к диаметру волокна. В частности, d волокна равно d шагу , умноженному на квадрат r . На дополнительном рисунке 4 мы показываем, что устройства могут быть расположены близко друг к другу в волокне на расстоянии ~ 6,5 см при использовании расстояния между заготовками 0,65 мм и коэффициента вытяжки 10. Дальнейшее увеличение плотности устройств может быть достигнуто с помощью меньшее расстояние между устройствами в преформе и меньший коэффициент вытяжки. Увеличенный вид проволочных электродов, подключенных к вращаемому устройству, показан на дополнительном рисунке 5a, а дополнительный рисунок 5b показывает статистику углов поворота устройств внутри волокна. Средний зарегистрированный угол составляет 26,4 ° со стандартным отклонением всего 0,9.° на 157 устройствах, подтверждая масштабируемый и воспроизводимый контроль над положением и ориентацией каждого компонента. В диапазоне углов для успешных соединений между 24,05° и 28,24° мы наблюдаем 95,5% выхода дискретных устройств (т. е. 150 устройств) с электрическими контактными площадками, которые должным образом выровнены с электрическими проводами внутри волокна. Кроме того, улучшение конструкции преформы от полностью поликарбонатной (ПК) версии до многослойной преформы (ПК-ПММА-ПК) увеличивает долю успешно подключенных устройств ( n = 50) от 60 до 90 % за счет эффекта сочетания мягкого и твердого полимеров. Остальные 10% остаются неподключенными из-за наличия тонкого изолирующего полимерного барьера. Мы отмечаем, что этот вращательный подход к межсоединению устройств также позволяет соединять устройства с различными конфигурациями контактных площадок и разным количеством контактных площадок, используя различные соответствующие углы. Например, на дополнительном рисунке 6 мы описываем соединение микросхем с конфигурацией площадки три на два.
Цифровая адресация и хранение в памяти в волокнах и тканях
Дискретные внутриволоконные электронные устройства расположены единообразно в различных пространственных положениях вдоль волокна, при этом каждое устройство выполняет различные функции, такие как определение, хранение данных или хранение внутриволоконных алгоритмов (рис. 1e). Отправляя уникальную последовательную комбинацию цифровых 1 и 0, устройство с правильным совпадающим цифровым адресом по волокну можно «включить», чтобы активировать его внутренние функции, которые включают в себя память или модальности считывания. Для этой цели мы внедрили протокол цифровой адресации, в частности I 2 C-протокол внутри оптоволокна. Эквивалентная логическая схема каждого устройства в волокне состоит из логических элементов XNOR и AND, как показано на рис. 2a. С помощью этого цифрового протокола мы показываем, что несколько оптоволоконных устройств могут совместно использовать одни и те же четыре электрода из вольфрамовой проволоки, но, имея разные цифровые адреса, они логически изолированы друг от друга, поэтому мы можем независимо адресовать, получать доступ и управлять отдельными устройства и соответствующие им функции при различных пространственных положениях вдоль волокна (показаны на расстоянии 5 см, 40 см, 70 см) (рис. 2а).
2: Цифровая адресация при интеграции волокна и текстиля. a Индивидуальная цифровая адресация различных устройств в волокне. (Слева) Цифровая схема внутри каждого оптоволоконного устройства, которая позволяет активировать устройство, если входной 8-битный сигнал соответствует его внутреннему закодированному 8-битному адресу идентификатора. Каждый бит 8-битного входа считывается вентилем XNOR (каждая пунктирная линия представляет вентиль XNOR). Затем XNOR сравнивает один входной бит с сохраненным закодированным битом. Если они совпадают, выход равен 1. Если все выходы XNOR к вентилю И равны единице, тогда выход И равен единице, активируя функцию устройства и опуская сигнальную линию через вентиль НЕ. (Справа) Графики зависимости напряжения от времени цифрового волокна, в котором размещено несколько цифровых устройств. Каждое из устройств включается, если вход соответствует его адресу идентификатора. В противном случае устройство остается «ВЫКЛЮЧЕНО». Обратите внимание, что каждое устройство подключено к линии питания, поэтому состояние «ВЫКЛ. » является логической единицей, а состояние «ВКЛ.» — логическим 0. Каждой микросхемой можно управлять индивидуально и отдельно, используя свой отдельный цифровой адрес, что позволяет пространственное управление различными функциями устройства в разных точках вдоль волокна, например, на 5 см, 40 см и 70 см. b Интеграция пальцевого волокна (i) через иглу, (ii) в рукав свитера и (iii) в ткань на основе хлопка.
Изображение в полный размер
Отметим, что эти пальцевые волокна также тонкие и гибкие, что позволяет продевать их в иглу (рис. 2b, i) и вшивать в ткань (рис. 2b, ii и iii). Чтобы проиллюстрировать свойства памяти этих цифровых волокон и тканей, на рис. 3а показаны запись, хранение и считывание двоичной информации в волокно, содержащее встроенные цифровые устройства памяти, и из него с помощью цифровых сигналов, передаваемых через его электроды. Для использования этих волокон с цифровой памятью в гибких тканях мы охарактеризовали их механические свойства. Во-первых, практичность этих волокон памяти в реальных приложениях ткани подтверждается их способностью выдерживать десять циклов стирки с незначительным ухудшением резкости напряжения и нулевой потерей информации, хранящейся в памяти (рис. 3b). Во-вторых, механическое изгибание волокна до радиуса кривизны 12 мм сохраняет резкое переключение напряжения с нулевой потерей информации в хранимой памяти (рис. 3с), подчеркивая надежность межсоединений волокна. Чтобы определить радиус кривизны, при котором либо обрываются провода, либо начинают терять соединения с устройством, мы сгибаем отрезок волокна, содержащий устройство, вокруг стержней с уменьшающимся радиусом, измеряя при этом сопротивление между двумя проволочными электродами. Когда вольфрамовые провода не повреждены и хорошо подключены к устройству, измеренное сопротивление составляет ~ 350 кОм. Если провода оборвутся или потеряют связь с устройством, измеренное сопротивление будет указывать на обрыв цепи. Затем мы сгибаем волокно вокруг стержней с постепенно меньшим радиусом и определяем, что радиус изгиба, при котором волоконное устройство становится неработоспособным, составляет 3,12 мм (дополнительный рисунок 7). При более тщательном исследовании с помощью оптической микроскопии было обнаружено, что вольфрамовые проволоки разрываются и разъединяются при этом радиусе изгиба.
a Запись и считывание двоичной информации (слово «память») в волокно и из него с помощью цифровых сигналов, передаваемых через его сигнальный электрод, для исходного термовытянутого волокна (тактовая частота: 100 кГц), b показания волокна после промывки в течение 10 циклов (тактовая частота: 100 кГц) и c показания волокна после его изгиба с радиусом кривизны 12 мм (тактовая частота: 300 кГц). d Для хранения больших объемов информации в волокне информация разделяется и сохраняется в различных запоминающих устройствах вдоль волокна. В пределах 1 метра волокна может храниться 767 килобит информации. e Сюжет музыкального произведения размером 0,48 мегабайта, записанного на ткани, хранившегося в течение 2 месяцев без питания, а затем считанного с ткани, интегрированной с волокнами памяти.
Полноразмерное изображение
Оптоволокно с цифровой памятью обеспечивает несколько существенных улучшений по сравнению с предыдущими исследованиями, основанными на аналоговых сигналах, включая высокую производительность переключения, более низкое энергопотребление и более высокую плотность памяти. Во-первых, для переключения цифрового состояния с нуля на единицу требуется всего 3,3 В (дополнительный рис. 8), при этом энергопотребление при записи и чтении новой информации составляет 5,5 мВт по сравнению с 475 мВт в предыдущей аналоговой памяти с фазовым переходом. халькогенидные волокна 20 . Во-вторых, масштабируемость термического волочения на большие расстояния в сочетании с возможностью индивидуального управления многочисленными внутриволоконными устройствами позволяет хранить большие объемы памяти в одной нити волокна. На дополнительном рисунке 9 показан полноцветный (красный-зеленый-синий) 8-кадровый фильм размером 767 килобит, который хранится в пределах метра оптоволокна. Это значение плотности памяти примерно на шесть порядков больше, чем предел хранения однобитовой памяти в предыдущих волокнах, подвергнутых термической вытяжке 20 , возникающие из-за их ограничения на одно волокно и одно устройство. Разделив информацию между различными адресуемыми запоминающими устройствами вдоль волокна (рис. 3d), мы затем демонстрируем хранение музыкального файла (0,48 МБ) в текстиле (рис. 3e). Это преимущество большого объема памяти дополнительно усиливается способностью оптоволокна поддерживать энергонезависимое долговременное хранение данных, поскольку фильмы и музыка успешно хранились в оптоволокне и матрице в течение 2 месяцев без питания.
Физиологический мониторинг
Еще одна возможность, предоставляемая этой архитектурой, включает связь внутри оптоволокна между устройствами посредством цифровых сигналов. Было изготовлено цифровое волокно, состоящее из гибрида функций памяти и измерения температуры (MT) на одной и той же нити. На рис. 4а показана схема волокна МТ с дискретными цифровыми термисторными устройствами, соединенными с другими блоками памяти по длине волокна. В этом волокне температурный вход обнаруживается и локально преобразуется из аналоговых сигналов в цифровые с помощью термисторного устройства. Эти цифровые сигналы позже передаются в блоки памяти внутри оптоволокна для хранения. На рис. 4b показано 16-разрядное показание температуры, которое определяется термисторным устройством, а затем сохраняется и считывается из блока памяти. Отметим также, что в этой работе демонстрируется первая прядь волокна, которая содержит взаимосвязанные разрозненные функциональные возможности, адресуемые на разных длинах волокна, в отличие от предыдущих волокон 9,10,11 , которые имеют одинаковые функциональные возможности по всей длине.
a Схема гибридного волокна с цифровой памятью и датчиком температуры (MT), содержащего одно термисторное устройство с несколькими взаимосвязанными модулями памяти по длине волокна. При измерении температуры аналоговый сигнал локально преобразуется в цифровой с помощью термистора. Цифровые сигналы обрабатываются внешним процессором и передаются во встроенные блоки памяти для хранения данных. b График напряжение-время 16-битного измерения температуры, сегментированный на старший и младший байты. Показанное значение соответствует значению 1937, которое затем преобразуется в десятичную форму 19,37 во время анализа данных. c Схема, показывающая внедрение волокна МТ в компрессионную рубашку, которую носит пользователь для хранения температуры тела при различных видах деятельности. Обратите внимание, что термисторный блок помещается под мышкой для измерения подмышечной температуры тела. d Графики времени сохраненных в ткани значений температуры тела пользователя. (слева) Показания температуры ткани MT были откалиброваны и подтверждены коммерческим регистратором температуры, и было показано, что они соответствуют эталонным измерениям. (справа) Хранение температуры тела в ткани в течение 4,5 часов (разделено на несколько дней) и при различных видах деятельности. Уникально то, что ткань MT позволяет проводить мероприятия на свежем воздухе, в отличие от обычного громоздкого оборудования для измерения температуры. Кроме того, MT-волокно является гибким, что позволяет регистрировать температуру при динамических действиях, таких как ходьба и бег. Черная линия — это скользящая средняя за 2-минутное окно. Более низкая температура, зарегистрированная во время бега, объясняется охлаждением тела потом.
Полноразмерное изображение
Сочетание функций памяти и сенсорных функций открывает возможности для физиологических приложений. В частности, мы демонстрируем использование этого цифрового волокна MT, встроенного внутрь нижней стороны рубашки для облегчения контакта с кожей человека, для хранения физиологических данных человека для мониторинга состояния здоровья (рис. 4c). Здесь волоконный датчик температуры находится в непосредственном контакте с кожей подмышечной впадины. Температура тела измеряется каждые 0,5 с и передается в память волокна для хранения температурного профиля при различных физических нагрузках: сидение, стояние, ходьба и бег. На графике для калибровки в помещении начальное повышение температуры (увеличение на ~1 °C) связано с временным выравниванием температуры, определяемой датчиком, при прямом контакте с кожей (подмышка). Через некоторое время достигается состояние теплового равновесия, что приводит к постоянной стационарной температуре. Об этом временном повышении температуры также сообщалось в предыдущей литературе 21,22 , где скорость увеличения зависит от того, насколько быстро может происходить теплопередача между кожей и датчиком. Как видно из этой предшествующей литературы и из нашей работы, продолжительность этого переходного повышения обычно находится в диапазоне минут до того, как будет зафиксирована стационарная температура. При стоянии частота сердечных сокращений в покое увеличивается, вызывая небольшое повышение температуры тела, и снова возникает температурно-выравнивающий градиент. Затем весь набор наружных данных, включающий более 4,5 часов измерений температуры в течение нескольких дней, обнаруживается в режиме реального времени и сохраняется в самой цифровой памяти волокна, что подчеркивает возможность долговременной регистрации данных и механическую надежность волокна (рис. 4г). Колебания температуры при ходьбе и беге происходят за счет попеременного нагревания и охлаждения при махах руками. Когда рука находится в движении, трение движения в подмышечной впадине вызывает повышение локальной температуры окружающей среды. Испарительное охлаждение пота в подмышечной впадине, особенно при беге, приводит к выявляемому снижению локальной температуры.
Вывод машинного обучения в тканях
Затем этот набор данных о температуре тела используется для обучения нейронной сети обнаружению и классификации признаков сенсорных входов, в данном случае температурно-временных характеристик (дополнительный рис. 10) различных человеческих активности, что позволяет классифицировать четыре различных активности (сидение, стояние, ходьба и бег) на основе колебаний температуры тела. Для обучения этой сети ~ 1800 секций значений температуры, каждая из которых охватывает 12 с, соответствующих четырем классам, предоставляются в качестве входных данных для сверточной нейронной сети. Количество слоев и узлов, а также значения весов и смещений оптимизированы для обеспечения высокой точности обучения (в среднем 97,9 ± 0,7% для 20 обучающих процессов) (подробнее о нейронной сети см. Методы). После обучения значения весов и смещений извлекаются и уменьшаются до двух значащих цифр для создания сжатой нейронной сети. Эта сжатая нейронная сеть, включающая математические уравнения для выбора признаков, веса, смещения и функции ReLu, используемые в двух сверточных фильтрах, коды для умножения и сложения матриц, используемые в операциях со слоями, а также веса, смещения и функции активации для четырехслойного нейронного сети (6 на 50 на 25 на 4 нейрона, всего 1650 нейронных соединений), все они хранятся в цифровой памяти волокна внутри ткани (рис. 5а). На рисунке 5b показан конкретный процесс нейронной сети, происходящий в волокне, от ввода измеренных данных о температуре до вывода решения. 12-секундная выборка измерения температуры, соответствующая неизвестной активности, первоначально обнаруженной термистором в волокне, предоставляется в качестве входных данных для сжатой нейронной сети в цифровом волокне. Алгоритмы, хранящиеся в памяти волокна, затем выполняют следующие операции с образцом: сначала рассчитываются выбранные характеристики (стандартное отклонение, усредненная положительная разница и усредненная отрицательная разница) на основе 12-секундного измерения. Затем эти три входных объекта подаются на два последовательных слоя свертки с шестью фильтрами перед выполнением выравнивания и максимального объединения. Затем выходные данные передаются в нейронную сеть с четырьмя слоями для получения вероятностей прогнозирования четырех различных действий. В качестве конечного результата выбирается действие с наибольшей вероятностью. Эти выходные решения затем сохраняются в волокне. Для оценки правильности принятия решения выходное решение сравнивается с фактической деятельностью. Встроенная нейронная сеть для распознавания человеческой деятельности достигает точности теста 96,4% (рис. 5в). Мы иллюстрируем ряд потенциальных применений тканей с возможностями машинного обучения: например, отслеживание активности людей в режиме реального времени в сочетании с возможностью обнаружения температурных аномалий может обеспечить ранние предупреждающие признаки таких состояний, как гипертермия (дополнительный рис. 11) или помочь в раннем выявлении таких заболеваний, как COVID-19, у больших групп населения.
a Схема рубашки, интегрированной с цифровым волокном, которое имеет датчики, хранилище данных, настраиваемые программы и нейронную сеть, хранящиеся в его запоминающих устройствах. b Эта цифровая ткань способна запускать нейронную сеть, которая распознает действия владельца в режиме реального времени без вмешательства человека. Работа нейронной сети заключается в следующем: 12-секундное измерение температуры измеряется в режиме реального времени и вводится во внутриволоконную сверточную нейронную сеть (CNN), которая состоит из выделения признаков, двух сверточных слоев и четырех нейронных слоев. . После этих слоев волокно дает окончательное решение о типе деятельности, выполняемой носителем. После принятия решения пользовательские программы, зависящие от активности и температуры, хранящиеся в волокне, обеспечивают обратную связь о физиологическом состоянии пользователя (дополнительный рисунок 11). c Точность распознавания человеческой деятельности встроенной CNN показана в таблице прогнозов, что указывает на среднюю точность 96,4%.
Полноразмерное изображение
Обсуждение
Таким образом, представлены десятки метров полимерного волокна с цифровым восприятием и цифровой памятью с общей емкостью хранения ~7,6 × 10 5 бит памяти на метр. Одно соединение на конце оптоволокна используется для независимого доступа к нескольким устройствам, что позволяет выполнять несколько функций по одному волокну, тем самым преодолевая ограничение одного волокна на одно устройство, с которым сталкивались предыдущие подходы. Сокращение количества необходимых электрических подключений к одному терминалу устраняет основной источник уязвимости окружающей среды и надежности. Полезность этого подхода демонстрируется использованием одного волокна для сбора и хранения 270-минутных данных о температуре поверхности тела в течение нескольких дней и во время различных физических нагрузок. Нейронная сеть с 1650 нейронными связями обучается на основе корреляции температура-время-активность и впоследствии сохраняется в том же волокне. При представлении неизвестного набора данных «температура-время» волокно делает вывод о типе физической активности с точностью до 96% на основе 12-секундного показания температуры. Возможность измерения и хранения цифровой информации в волокне, которое также содержит алгоритмы логического вывода, открывает интригующие возможности в различных приложениях, в которых функциональные волокна и ткани находятся в непосредственной близости от человеческого тела, включая автономную доставку лекарств 23 , нейронные интерфейсы 18 , персональное терморегулирование 24 , и вычисления в тканях 2 .
Методы
Подготовка преформ
Волокна со встроенными цифровыми микрочипами вытянуты из макроскопической прямоугольной заготовки. Толщина, ширина и длина заготовки составляют ~11, ~12 и ~200 мм соответственно. Мы размещаем микросхемы памяти и датчиков температуры в предварительно определенных микрокарманах под критическим углом и используем конструкцию «мягко-жесткий сэндвич», чтобы обеспечить прочное соединение контактных площадок с проводами во время процесса термического волочения.
Выбор материала
Мы выбираем прозрачный термопластичный поликарбонат (ПК) из-за его превосходных механических свойств для применения в устройствах из волокна и ткани, а также из-за его роли верхнего и нижнего промежуточных слоев во время вытяжки термоволокна. В качестве мягкого среднего слоя мы используем поли(метилметакрилат) (ПММА). ПММА имеет более низкую вязкость, чем ПК, при температуре вытягивания волокна, что делает его подходящим мягким полимером с многослойным расположением слоев, необходимым для того, чтобы проволочные электроды могли легко прорезаться во время вытягивания.
Программируемая микрообработка
Мы используем фрезерный станок с ЧПУ и программируем желаемое количество микроразмерных карманов, используя функцию нерегулярного кармана, которая обеспечивает ориентацию критического угла для микрочипов. Плита ПММА сначала разрезается на размеры шириной 12 мм, толщиной 0,8 мм и длиной 100 мм, на которых определяются микрокарманы на передней поверхности плиты. Размеры кармана составляют 0,84 мм × 0,84 мм для датчиков температуры, 0,50 мм × 0,50 мм для устройств памяти меньшей емкости и 0,84 мм × 0,9.0 мм для устройств памяти большей емкости. Каждый карман устройства фрезеруется на глубину 0,4 мм. Расстояние между микрочипами запрограммировано на 1,15 мм, что после вытягивания дает расстояние между устройствами примерно от 5 до 20 см в зависимости от коэффициента протяжки. Для этого исследования были созданы преформы с количеством стружки от 50 до 150 в одном волокне. На задней стороне плиты из ПММА фрезеруются четыре канала размерами 0,25 мм × 0,25 мм × 200 мм для подачи вольфрамовой проволоки диаметром 25 мкм. Межцентровое расстояние между каналами составляет 0,84 мм. Это число имеет решающее значение для достижения одновременного и точного соединения между проводами и контактными площадками без электрического короткого замыкания или несоответствия положения. Мы определяем это значение, рассматривая коэффициент вытяжки от преформы к волокну и учитывая поведение проводов вокруг устройств во время перехода преформы к волокну. Мы используем концевую фрезу 0,5 мм для грубого и быстрого фрезерования и концевую фрезу 0,125 мм для тонкой обработки, чтобы обеспечить надежную посадку микрочипов в гнезде под правильным углом. Мы проектируем функциональный слой так, чтобы он располагался точно в центре многослойной конструкции преформы, чтобы обеспечить равномерное усилие, прилагаемое слоями поликарбоната. Для преформы с более крупными запоминающими устройствами верхний промежуточный слой поликарбоната (голая плита) имеет толщину 4,8 мм, ширину 12 мм и длину 200 мм и подходит к слою ПММА со стороны контактных площадок микросхем. Нижний сэндвич-слой ПК (толщина 5,2 мм и длина 200 мм) содержит канал размерами 0,52 мм х 0,52 мм х 200 мм. Этот канал используется для подачи вольфрама 50 мкм в качестве подложки, которая помогает прижимать микрочип к четырем контактным проводам во время перехода преформы в волокно. Для предотвращения прямого контакта заднего провода с микросхемами мы используем слой ПК толщиной 0,25 мм (шириной 12 мм и длиной 200 мм) между ПММА и нижней пластиной ПК. Мы также используем два слоя поликарбоната длиной 50 мм (с той же шириной и толщиной, что и функциональный слой ПММА) и размещаем их на верхнем и нижнем концах слоя ПММА, чтобы предотвратить деформацию функционального слоя в процессе консолидации преформы. Для более тонкого волокна с меньшими запоминающими устройствами ширина и толщина пластин, использованных выше, уменьшаются в четыре раза, при этом размер поперечного сечения окончательно собранной заготовки составляет приблизительно 4 мм × 3 мм.
Консолидация преформы
Мы собрали фрезерованные компоненты и вставили расходуемые проволоки с тефлоновым покрытием в каналы на слоях ПММА и ПК. Это гарантирует сохранение формы каналов в процессе консолидации. Мы консолидировали преформу при температуре 186°C в течение 55 мин в печи, чтобы соединить слои поликарбоната и полиметилметакрилата.
Термическая вытяжка цифровых волокон с вращающимися устройствами
Заготовка вытягивается в трехзонной вертикальной трубчатой печи с температурой верхней зоны 110°С, средней зоны 248 °С (температура наживки 270°С). °C) и температуру нижней зоны 110 °C при подаче четырех электрических соединительных проводов диаметром 25 мкм и одного вольфрамового обратного провода диаметром 50 мкм. Размеры волокна контролируются лазерными микрометрами. Мы используем напряжение 50–100 грамм/мм 2 для протяжки волокна. Коэффициент вытяжки процесса составляет от 10 до 15. Скорость подачи преформы составляет 1 мм/мин, а скорость ведущего шпиля варьируется в зависимости от коэффициента вытяжки. Размер поперечного сечения волокна составляет 300 мкм на 225 мкм. Оптоволоконная система способна масштабировать производство этих цифровых волокон с текущей скоростью производства волокна 10 м/мин.
Электрические характеристики цифровых волокон
Основными используемыми микросхемами цифровой памяти являются интегральные схемы 24CW1280X от Microchip Technology. Мы также проверили оптоволокно с микросхемами памяти меньшей емкости, такими как AT24CSW01. Мы написали собственный код для изменения цифрового адреса микросхем памяти. Для подключения к концу цифрового волокна мы растворяем конец волокна в дихлорметане, чтобы удалить оболочку. Затем мы удаляем резервный провод и разделяем четыре проволочных электрода, чтобы сделать отдельные соединения с внешней схемой считывания. Чтобы определить, связаны ли чипы, мы написали код сканера, который находит чипы с разными адресами вдоль волокна. Затем мы используем осциллограф для регистрации и проверки цифровых сигналов на сигнальных и тактовых линиях по мере того, как мы передаем входные сигналы и получаем сигналы подтверждения от оптоволоконных чипов.
Хранение фильмов и музыки в волокнах памяти
Фильм сначала разбивается на восемь кадров. Затем мы используем программу Python для извлечения значений интенсивности красного-зеленого-синего (RGB) (от 0 до 255) для каждого пикселя в кадрах. Эти значения представлены в виде списка, разделенного пробелами. Мы используем программу «записи» для кодирования этих целочисленных значений в чипы памяти в волокне. Каждое значение занимает один байт, который хранится по одному адресу памяти в 8-битной микросхеме памяти. Архитектура памяти представляет собой электрически стираемую программируемую постоянную память (EEPROM). Для проверки энергонезависимости встроенных в волокно модулей EEPROM эта информация хранится в волокне без питания в течение 2 месяцев. Затем используется программа «чтения» памяти для считывания информации, хранящейся во всех адресах памяти в волокне. Окончательная прочитанная информация представлена в виде списка чисел, который возвращается в другую программу Python, которая реконструирует этот список обратно в отдельные кадры RGB. Для музыкального файла музыка сначала предварительно обрабатывается в 16-битные значения с частотой дискретизации 4000 Гц. Точно так же программа записи и чтения для 16-битных значений используется для записи, хранения и чтения отдельных аудиосэмплов в волокно памяти и из него.
Изготовление и эксплуатация гибридных волоконно-оптических кабелей с цифровой памятью и температурой (MT).
Цифровые датчики температуры представляют собой термисторы MAX31875 от Maxim Integrated. Эти МТ волокна вытягиваются с использованием тех же параметров термовытяжки, что и волокна с памятью. Чтобы проверить, все ли устройства подключены, мы запускаем код сканера. Затем мы пишем программу, которая настраивает и управляет микросхемами термисторов для определения нового значения температуры каждые 0,5 с. Собранные значения температуры постоянно записываются во встроенные микросхемы памяти для хранения температуры тела во время работы. Эта программа написана на языке JavaScript и хранится в чипах встроенной памяти в строковом формате. Для запуска этой программы программа интерпретируется внешним микропроцессором (ширина ~ 1 см) (STM32F401). Внешняя батарея LiPo используется для питания волокон МТ при напряжении 3,3 В. Волокна МТ вручную вшиваются в компрессионную майку и крепятся к компрессионной рубашке с помощью плотных тканых перемычек. Чтобы гарантировать, что цифровое волокно находится в постоянном контакте с кожей, используется плотная компрессионная рубашка, чтобы сжать волоконный датчик по направлению к туловищу. Кроме того, он предназначен для размещения волоконного датчика температуры в самой верхней точке подмышечной впадины, поскольку в этом случае датчик можно расположить между плечом и туловищем, что позволяет постоянно прижимать датчик руками к туловищу. даже при ходьбе и беге. Гибкость полимерного волокна позволяет интегрировать его с компрессионной майкой и облегчает прилегание пальцевых волокон к коже во время движения. Коммерческий регистратор температуры, используемый для калибровки и проверки, представляет собой AZ Instruments Corp 8859.8.
Условия изгиба и стирки
Для проверки устойчивости волокон к изгибу волокно с цифровой памятью сгибают вокруг стержня из нержавеющей стали диаметром 24 мм. Сохраненная информация затем считывается из цифровой памяти волокна, чтобы определить, подключены ли провода к устройству и сохраняются ли данные в запоминающем устройстве. Чтобы определить радиус изгиба, при котором провода теряют соединение с устройством, мы проводим разрушающее испытание, изгибая волокно вокруг стержней из нержавеющей стали с постепенно меньшим диаметром, измеряя сопротивление на электродах волокна с помощью омметра, чтобы определить точку, в которой физический сбой вызывает отключение от встроенных устройств.
Для теста на стирку волокна с эффектом памяти помещали в мешок для стирки и стирали в портативной стиральной машине (Pyle PUCWM11). Волокна с эффектом памяти подвергали 10 циклам стирки (режим стирки «хлопок», без моющих средств, продолжительность цикла 15 мин) при температуре воды 45°С.
Нейронная сеть и программы в цифровых волокнах
Для обучения нейронной сети из цифровых волокон МТ сначала были извлечены сохраненные данные о температуре тела пользователя. Затем эти данные были помечены в соответствии с различными видами деятельности. Мы написали программу обработки данных, которая сегментирует сохраненные данные на разделы желаемой длительности. Сохраненные данные были разделены на последовательные сегменты выборки продолжительностью 12 с с перекрытием между каждым сегментом в 6 с. Каждая 12-секундная секция содержит 24 точки данных, так как температура регистрируется каждые 0,5 с. Для каждого из этих разделов мы выбрали и рассчитали три характеристики: стандартное отклонение (STD), среднюю положительную разницу (PCX) и среднюю отрицательную разницу (NCX). Средняя разница сначала измеряется путем взятия разницы между n и n + 1 значения температуры. Если он положительный, он попадает в «положительный» список, из которого рассчитывается среднее значение списка как PCX. Если он отрицательный, он попадает в «отрицательный» список, из которого рассчитывается среднее значение списка как NCX. Для обучения нейронной сети мы используем 1794 секции, помеченные различными действиями. Обучение и первоначальная проверка выполнялись в автономном режиме через Keras на внешнем компьютере (Python в PyCharm). Мы обучили одномерную сверточную нейронную сеть (CNN) с двумя слоями свертки, максимальным объединением, сглаживанием и четырьмя нейронными слоями. Входными данными для CNN являются три функции (STD, PCX, NCX). 1794 раздела разделены на 90% данных обучения и 10% данных проверки. Используемое количество эпох составляло 1000, останавливаясь, когда появлялись признаки переобучения, т. е. когда кривая потерь при обучении отклонялась от кривой потерь при проверке. Оба слоя свертки использовали размер фильтра шесть с размером ядра один. Тип активации ReLu. Для максимального объединения размер пула равен 2. Для нейронной сети первый слой использует шесть нейронов, второй слой использует 50 нейронов, третий слой использует 25, а четвертый слой использует четыре нейрона. Все четыре слоя используют ReLu в качестве функции активации. Затем четыре выхода для различных действий (сидение, стояние, ходьба и бег) преобразуются в вероятности с помощью функции softmax. Нейронная сеть была оптимизирована с использованием категориальной функции кросс-энтропийных потерь и алгоритма оптимизации Адама. Вышеупомянутые параметры были оптимизированы, чтобы модель соответствовала емкости встроенной памяти и уменьшала задержку принятия решения, предотвращая при этом потерю точности из-за чрезмерного сжатия. Кроме того, вместо других статистических измерений используются три признака (STD, PCX, NCX), поскольку они дают наивысшую точность при небольшом размере нейронной сети. После обучения обученные веса и смещения сжимаются до двух значащих цифр, чтобы уменьшить использование памяти. Эта сжатая нейронная сеть, включая математические уравнения для выбора признаков, веса, смещения и функции ReLu, используемые в двух сверточных фильтрах, коды для матричного умножения и сложения, а также веса и смещения для 6 × 50 × ×25 × 4 слоев нейронной сети, были все хранится в волокне. Точность прогноза была получена путем ввода тестовых данных через сжатую нейронную сеть внутри волокна и сравнения их выходных данных с фактической активностью. Количество тестовых разделов составляет 770, состоящих из различных действий. Все программы для различных физиологических приложений, а также голосовые команды, как показано на дополнительном рисунке 10, хранятся в волокне памяти и считываются из него в виде строкового формата.
Ссылки
-
Пейдж, Т. Барьеры на пути внедрения носимых технологий. Дж. Инф. Технол. 4 , 1–13 (2015).
Google ученый
-
Локе Г. и др. Компьютерные ткани. Материя 2 , 786–788 (2020).
Артикул Google ученый
-
Джон Уокер, С. Большие данные: революция, которая изменит то, как мы живем, работаем и думаем. Междунар. Дж. Объявление. 33 , 181–183 (2014).
Артикул Google ученый
-
Пламмер, Д. Д., Дил, М. Д. и Гриффин, П. Б. Технология кремниевых СБИС: основы, практика и моделирование (Pearson India Education Services, 2016).
-
Квятковски Р. и Липсон Х. Самомоделирующие машины, не зависящие от задач.
 науч. Робот. 4 , eaau9354 (2019).
науч. Робот. 4 , eaau9354 (2019). Артикул Google ученый
-
Kang, S.M. & Leblebici, Y. CMOS Digital Integrated Circuits Analysis & Design (McGraw-Hill Inc., 2002).
-
Гао, В. и др. Полностью интегрированные массивы носимых датчиков для мультиплексного анализа пота на месте. Природа 529 , 509–514 (2016).
ОБЪЯВЛЕНИЕ КАС Статья Google ученый
-
Викаксоно, И. и др. Специализированный костюм из электронного текстиля для крупномасштабного пространственно-временного физиологического зондирования in vivo. нпдж Flex. Электрон. 4 , 5 (2020).
Артикул Google ученый
-
Локе Г. и др. Структурированные мультиматериальные нити для 3D-печати оптоэлектроники.
Нац. коммун. 10 , 4010 (2019). ОБЪЯВЛЕНИЕ Статья Google ученый
-
Гуменник А. и др. Химическое зондирование «все в волокне». Доп. Матер. 24 , 6005–6009 (2012).
КАС Статья Google ученый
-
Байындир М. и др. Оптоэлектронные волокна металл-изолятор-полупроводник. Природа 431 , 826–829 (2004).
ОБЪЯВЛЕНИЕ КАС Статья Google ученый
-
О’Коннор, Б., Нотерн, Д., Пайп, К. П. и Штейн, М. Высокоэффективные широкополосные архитектуры солнечных элементов на основе массивов распределенных по объему узкополосных фотоэлектрических волокон. Опц. Экспресс 18 , А432 (2010).
ОБЪЯВЛЕНИЕ Статья Google ученый
-
Okawachi, Y. et al. Рамановский медленный свет в волокнах и на чипе. В Optics InfoBase Conference Papers TuB3 (OSA, 2006). https://doi.org/10.1364/sl.2006.tub3
-
Biberman, A. et al. Первая демонстрация дальней передачи данных со скоростью 12,5 Гбит/с на расстояние 80 км с использованием кремниевого микрокольцевого резонатора электрооптического модулятора. В документах конференции Optics InfoBase JWA28 (ОСА, 2010 г.). https://doi.org/10.1364/nfoec.2010.jwa28
-
Каник М. и др. Искусственная мышца на основе волокон с программируемой деформацией. Наука 365 , 145–150 (2019).
ОБЪЯВЛЕНИЕ КАС пабмед ПабМед Центральный Google ученый
-
Парк С., Локе Г., Финк Ю. и Аникеева П. Оптоэлектроника на основе гибкого волокна для нейронных интерфейсов. Хим. соц. 48 , 1826–1852 (2019).
КАС Статья Google ученый
-
Guo, Y. et al. Полимерный композит с углеродными нановолокнами, выровненными при термическом вытягивании, в качестве микроэлектрода для хронических нейронных интерфейсов. ACS Nano 11 , 6574–6585 (2017).
КАС Статья Google ученый
-
Данто, С., Рафф, З., Ван, З., Джоаннопулос, Дж. Д. и Финк, Ю.
Переключение памяти Овоник в мультиматериальных волокнах. Доп. Функц. Матер. 21 , 1095–1101 (2011). КАС Статья Google ученый
-
Smith, A.D.H., Crabtree, D.R., Bilzon, J.L.J. & Walsh, N.P. Пригодность беспроводных iButton и термисторов для измерения температуры кожи человека. Физиол. Изм. 31 , 95–114 (2010).
Артикул Google ученый
-
Лю, Х. и др. Реакция человеческого теплового восприятия и температуры кожи на ступенчатое изменение переходной тепловой среды. Сборка. Окружающая среда. 73 , 232–238 (2014).
Артикул Google ученый
-
Хассанзаде П., Атьяби Ф. и Динарванд Р. Значение искусственного интеллекта в разработке систем доставки лекарств. Доп. Наркотик Делив. 151–152 , 169–190 (2019).
Артикул Google ученый
-
Давенпорт, Т. и Калакота, Р. Потенциал искусственного интеллекта в здравоохранении. Здоровье будущегоc. J. 6 , 94–98 (2019).
Артикул Google ученый
О’Коннор, Б., Пайп, К.П. и Штейн, М. Органические фотоэлектрические устройства на основе волокна. Заяв. физ. лат. 92 , 193306 (2008).
ОБЪЯВЛЕНИЕ Статья Google ученый
Локе, Г., Ян, В., Худиев, Т., Ноэль, Г. и Финк, Ю. Последние достижения и перспективы термически вытянутой мультиматериальной волоконной электроники. Доп. Матер. 32 , 1
1 (2020).
КАС Статья Google ученый
Загрузить ссылки
Цифровое оборудование: как компании могут выиграть в меняющейся производственной игре
Статья (PDF-1MB)
Традиционно и по уважительной причине ведущих машиностроительных и производственных компаний сосредоточили свое внимание на продаже оборудования (например, машин, компонентов) и основывали свою бизнес-модель и успех на выдающемся качестве своей продукции. Но теперь похоже, что эти дни вполне могут быть в прошлом. В машиностроительной отрасли происходят три мощных взаимодополняющих события, требующих фундаментального переосмысления существующих бизнес-моделей:
Будьте в курсе ваших любимых тем
Усиление глобальной конкуренции. В течение многих десятилетий европейские и американские машиностроительные компании доминировали на мировом рынке машиностроения. Однако этот баланс сил смещается в сторону Азиатско-Тихоокеанского региона (Иллюстрация 1). Ряд новых игроков, появившихся в регионе в последние годы, особенно в Китае, в настоящее время набирают силу. Очень конкурентоспособные по цене копии американских и европейских машин, которые они предлагают, наряду с их собственной инновационной мощью, позиционируют Азиатско-Тихоокеанский регион как новый глобальный центр машиностроения, который все чаще включает в себя специальную технику. Следовательно, у производителей машин (особенно за пределами Азии) практически нет других вариантов защиты своей ценовой надбавки, кроме как заняться крайне важной темой будущего цифрового оборудования.
Экспонат 1
Мы стремимся предоставить людям с ограниченными возможностями равный доступ к нашему веб-сайту. Если вам нужна информация об этом контенте, мы будем рады работать с вами. Пожалуйста, напишите нам по адресу: [email protected]
Коммодитизация аппаратных средств. Оборудование — в смысле машин и производственных установок — становится все более товарным. Там, где специальные знания раньше были необходимым активом, теперь технические возможности — прежде всего способность начать замену специальных знаний программным обеспечением в определенных частях машиностроения — это все, что требуется для производства современного оборудования. Кроме того, совершенно новые цифровые технологии, такие как аддитивное производство, позволяют производителям машин или деталей производить более сложные продукты, которые не поддерживаются традиционными технологиями производства, а также быстрее и с меньшими затратами удовлетворять потребности клиентов. Как следствие, производители стандартных и даже специализированных машин, а также компании, занимающиеся проектированием оборудования, испытывают сильное давление со стороны затрат.
Сейсмический сдвиг в пулах стоимости стека технологий. Вместе упомянутые выше рыночные тенденции приводят к смещению концентрации стоимости в стеке цифровых технологий с аппаратного уровня на предложения аппаратно-программных услуг (дополнительную информацию об этом см. в Приложении 2).
Поскольку эти предложения в меньшей степени зависят от аппаратного обеспечения, которое раньше было препятствием для выхода на рынок, новое и все более ценное программное обеспечение и услуги теперь становятся полем битвы и точкой входа для новых технологических игроков, еще больше усложняя и усиливая уже описанную конкуренцию. . У этих игроков мало знаний, специфичных для производственной области, но они обладают превосходным программным обеспечением и ноу-хау в области аналитики. Они используют свои компетенции в сборе и анализе данных, чтобы предлагать привлекательные бизнес-модели IoT как услуга (например, профилактическое обслуживание на основе интеллектуальных машин, сбор данных и анализ) и даже бизнес-модели, основанные на результатах. Поскольку они понимают данные, которые производят такие машины лучше, чем другие, технологические игроки могут разрабатывать ряд совершенно новых продуктов и предложений. Например, сила аналитики данных может заставить технологических игроков продавать гарантированную мощность турбины — в отличие от реальных турбин — потому что профилактическое обслуживание может сделать мощность турбины 98 процентов надежный.
Цифровое оборудование как возможность роста в трудные времена
На фоне растущей конкуренции, коммерциализации и сопутствующего ценового давления цифровая трансформация является беспроигрышным шагом для всех производителей машин и производственных предприятий. Цифровые бизнес-модели открывают привлекательные возможности для роста и повышения эффективности. Прежде чем объяснять, почему это так, мы сначала определим, что на самом деле означает «цифровая техника».
Цифровизация состоит из набора действий, которые помогают организациям использовать возможности цифровых технологий в продуктах и услугах, клиентском опыте, аналитике и автоматизации. Этот процесс принимает множество форм, но почти в каждой отрасли, подвергающейся оцифровке, мы видим свидетельство пяти различных тем, связанных с цифровыми технологиями:
- Границы между секторами размыты. Организации переходят на новые игровые поля и обнаруживают, что компании, которые когда-то были изолированы от них, теперь являются их новейшими конкурентами.
- Возникают конфликты каналов между новыми цифровыми каналами и старыми каналами.
- Digital может раскрыть большой потенциал внутренних процессов и значительно повысить эффективность.
- Новые технологии и новое поведение клиентов определяют новые бизнес-модели.
- Необходимо создавать новые возможности и решать задачи в области ИТ/технологий, организации и лидерства.
Эти темы не более актуальны для машиностроения, чем для многих других. Однако их растущее значение в производстве обусловлено дополнительными отраслевыми сбоями. «Цифровое машиностроение» или «Индустрия 4. 0» (последняя понимается как экосистема, ориентированная на цифровизацию в производстве), построена на четырех тенденциях, связанных с цифровыми темами, обсуждавшимися выше, что делает цифровизацию в машиностроении уникальным явлением:
- мощность Интернета вещей (IoT), а также резкое снижение цен на узлы IoT и поразительный рост объемов данных, вычислительной мощности и возможностей подключения, особенно новых глобальных сетей с низким энергопотреблением
- появление возможностей аналитики и бизнес-аналитики
- новые формы взаимодействия человека с машиной, такие как сенсорные интерфейсы и системы дополненной реальности
- существенные улучшения в передаче цифровых инструкций в физический мир, такие как передовая робототехника и трехмерная печать
Цифровое оборудование предоставляет компаниям-производителям возможность строить свои собственные умные фабрики или продавать умные машины, которые помогают их клиентам оцифровывать свои. Помимо этого, цифровое оборудование также означает переход от «только аппаратного обеспечения» к «аппаратному обеспечению, программному обеспечению и услугам», что позволяет разрабатывать новые бизнес-модели. Например, в дополнение к собственному умному заводу инжиниринговая компания может также создать новую бизнес-модель на основе умных машин, позволяющую предлагать новые услуги, такие как профилактическое обслуживание. Цифровизация также делает возможными бизнес-модели, основанные на результатах, которые могут стать основой для таких предложений, как гарантированная производительность машин.
Хотите узнать больше о Digital McKinsey?
В последней модели вместо того, чтобы продавать газотурбинный двигатель производителю самолета или ветряную турбину коммунальному предприятию, производители будут гарантировать определенную производительность и продавать и оценивать мощность или выходную энергию только на основе конкретных, взаимно согласованных характеристик. показатели, которые можно постоянно измерять.
Все это сводится к неизбежности цифровизации и безотлагательности возможностей в новом машинном и производственном ландшафте. Это мнение, возможно, прекрасно выражено в знаменитых словах Джеффа Иммельта: «Если вы легли спать прошлой ночью как промышленная компания, вам [придется] проснуться сегодня утром как компания, занимающаяся программным обеспечением и аналитикой» (Джефф Иммельт). , генеральный директор GE, 2016 г.).
Как стать компанией по производству цифрового оборудования
Прежде чем разрабатывать бизнес-модели цифрового оборудования, производители должны принять три фундаментальных решения и определить минимальную роль своей организации в формирующейся экосистеме цифрового производства Индустрии 4.0:
Как использовать цифровые технологии для повышения эффективности и улучшения качества работы. Основная задача здесь — определить, какие цифровые варианты использования приносят наибольшую пользу и как цифровые технологии могут применяться во всем потоке создания ценности для повышения эффективности и снижения затрат. Для этого производители машин должны создать межфункциональную группу, которой будет поручено поставлять три конечных продукта:
- четкое понимание текущих болевых точек и действий, приводящих к потерям в потоке создания ценности, которые можно решить с помощью цифровых технологий
- набор цифровых инициатив, направленных на устранение этих болевых точек (приоритеты в зависимости от воздействия, возможности реализации и потребностей в инвестициях)
- дорожная карта высокого уровня, сочетающая быстрые победы и долгосрочные, высокоэффективные инициативы с четко определенными требованиями к ИТ
Как продвинуться вверх по стеку промышленной автоматизации и превратиться из поставщика оборудования в поставщика оборудования, программного обеспечения и услуг. Как описано выше, пулы стоимости в традиционном стеке промышленной автоматизации претерпевают резкий сдвиг в сторону программных приложений и облачных платформ/платформ IoT (Иллюстрация 2). Для машиностроительной компании это вводит стратегический императив «продвижения» стека технологий в сторону включения этих новых пулов прибыли. Способность машиностроительной компании добиться успеха во многом будет зависеть от ее опыта работы с Интернетом вещей, ее возможностей в области разработки программного обеспечения и ее присутствия в потоке создания ценности своих клиентов. Таким образом, компании, поставляющие целые заводы или инженерные решения, имеющие большое стратегическое значение, имеют больше шансов убедить клиентов в ценности своих программных решений, чем компании, поставляющие машины, имеющие лишь ограниченное стратегическое значение. Кроме того, машиностроительные компании должны определить свои стратегии IoT, при этом основные решения заключаются в том, присоединяться ли к экосистеме или строить ее (и какую именно), а также предлагать ли платформу с добавленной стоимостью и сопутствующие услуги или создавать свои собственные.
Экспонат 2
Мы стремимся предоставить людям с ограниченными возможностями равный доступ к нашему веб-сайту. Если вам нужна информация об этом контенте, мы будем рады работать с вами. Пожалуйста, напишите нам по адресу: [email protected]
Как расширить или изменить существующие портфолио компаний с помощью новых цифровых технологий, таких как аддитивное производство, искусственный интеллект, робототехника или датчики. Наконец, машиностроительные компании, многие из которых имеют богатую историю лидерства в области технологий, могут рассматривать цифровые технологии как совершенно новые и очень привлекательные возможности для входа в новый бизнес и развития своего бизнеса от модели, ориентированной на оборудование/услуги, к более программно-ориентированная модель.
Чтобы начать это обсуждение, компании должны сначала нарисовать свою «технологическую карту», начиная с технологий, которые непосредственно примыкают к их текущему основному бизнесу. После составления технологической карты (см. пример в Приложении 3) необходимо провести стратегическую оценку привлекательности различных технологий/рынков и способности компании выйти на эти рынки. Вот краткий обзор последних технологических изменений, сделанных несколькими производственными компаниями, которые успешно вышли на новые рынки:
Экспонат 3
Мы стремимся предоставить людям с ограниченными возможностями равный доступ к нашему веб-сайту. Если вам нужна информация об этом контенте, мы будем рады работать с вами. Пожалуйста, напишите нам по адресу: [email protected]
- Трехмерная печать. Компания DMG Mori решила внедрить 3D-печать в свою деятельность и приобрела компанию по производству аддитивных материалов Realizer.
- Робототехника. ZF специализируется на искусственном интеллекте и использует партнерские отношения (например, с NVIDIA) для улучшения решений для автономного вождения.
- Датчики. Intel продолжает расширяться за пределы производства полупроводников, инвестируя в сенсорные технологии (например, приобретение Mobileye), что позволяет предлагать технологии цифрового зрения и автономные транспортные средства.
Три краеугольных камня создания компании цифрового машиностроения
После того, как направление станет ясным, несколько действий в трех основных областях изменений будут способствовать преобразованию традиционного производителя машин в цифровую компанию по производству машин (Иллюстрация 4).
Экспонат 4
Мы стремимся предоставить людям с ограниченными возможностями равный доступ к нашему веб-сайту. Если вам нужна информация об этом контенте, мы будем рады работать с вами. Пожалуйста, напишите нам по адресу: [email protected]
Очевидно, что «разработка бизнес-архитектуры» является здесь ключевым шагом, поскольку «решение о том, какие новые экосистемы строить» и «укрепление фундамента» являются, по сравнению с ними, стимулирующими, но не критически важными шагами. По этой причине нижеследующее больше всего сосредоточено на последствиях разработки бизнес-архитектуры.
Решение о том, какие новые экосистемы строить
Спектр возможностей цифровых машин очень широк, поэтому компаниям необходимо стратегически определить, где играть, что предлагать для разработки/расширения и для кого. Соответственно, они должны сначала определить, на какой экосистеме сосредоточиться (например, Индустрия 4.0, цифровая мобильность, цифровая логистика), а затем решить, следует ли:
- разработка новых предложений для текущих и новых клиентов
- расширять и дополнять услуги и продукты в цифровой форме, например услуги, связанные с цифровыми двойниками
- изучить новые модели доставки, такие как партнерство
- адаптировать бизнес-модель(и) для охвата меняющихся пулов стоимости, таких как бизнес-модели как услуга, платформы, модели, основанные на правах интеллектуальной собственности, или бизнес-модели, управляемые данными
В зависимости от индивидуальных обстоятельств, сильных сторон, ресурсов и общего стратегического плана компании могут выбрать один из следующих вариантов или любую их комбинацию.
Разработка бизнес-архитектуры
Компании должны будут (пере)проектировать структуру бизнеса через призму маркетинга, продуктов, операций и администрирования:
Маркетинг и продажи 4. 0. Лидеры цифровых технологий сосредоточены на клиенте, поэтому компаниям, занимающимся цифровым оборудованием, необходимо усовершенствовать свой подход к взаимодействию с клиентами и стремиться к совершенству цифрового маркетинга. Для этого им необходимо внедрить новейшие цифровые технологии для повышения эффективности процессов взаимодействия с клиентами, особенно связанных с маркетингом и продажами. Анализ болевых точек клиентов также поможет им улучшить их взаимодействие с клиентом, достигнув, например, более высокой конверсии или более низкого оттока.
Продукт 4.0. Компании должны радикально переосмыслить свои способы использования цифровых технологий для развития своих традиционных продуктов, а также для разработки новых продуктов, услуг и бизнес-моделей. Это означает интеграцию новейших цифровых технологий в исследования и разработки и инновации для ускорения процессов и значительного снижения затрат, а также готовность сотрудничать с другими в этих процессах и использовать открытые методологии разработки.
Как передовые промышленные компании должны подходить к стратегии искусственного интеллекта
Операции и услуги 4.0. Компании должны будут определить и создать структуру, в которой они будут работать как цифровая организация. Это включает в себя принятие решения о том, как они могут оптимально:
- стать умной фабрикой, например, за счет устранения неэффективности в цифровом потоке (т. е. более эффективного использования информации, которая не собрана/недоступна/не используется сегодня)
- обеспечить сквозную цифровую интеграцию операций (например, от сырья до потребителя)
- использовать цифровые технологии во всех функциях (открытые инновации, аддитивное производство, многоканальность, ценообразование, закупки, бэк-офис и т. д.)
Администрация 4.0. Компаниям необходимо будет внедрить цифровые технологии для повышения эффективности работы, особенно в рамках функций бэк-офиса. Это выходит далеко за рамки внедрения ИТ-инструментов и повышения уровня автоматизации. Администрирование следующего уровня означает использование передовой аналитики и искусственного интеллекта не только для повышения эффективности, но и для улучшения и ускорения подготовки управленческих решений (например, с помощью предиктивного прогнозирования).
Усиление фундаментов
ИТ и технологические возможности, а также организационные и культурные изменения будут иметь основополагающее значение для новой организации и предлагаемых ею цифровых технологий. Поэтому компаниям рекомендуется:
- укрепить эти активы, например, внедрить двухскоростную ИТ-архитектуру (например, распределенную архитектуру, включая периферию и т. д.), развернуть современные средства связи (включая интеллектуальные датчики) и кибербезопасность, разработать расширенную аналитику и программное обеспечение возможности (UX/UI, встроенное ПО и т. д.)
- преобразовать свою существующую организацию и культуру в цифровую и гибкую среду, характеризующуюся цифровым лидерством и цифровым управлением талантами, двухскоростной организацией и управлением партнерами
Практические рекомендации для начала цифровой трансформации
Безусловно, не существует единого стандартизированного подхода к началу работы и преобразованию производственной организации в цифровую машиностроительную компанию. Однако наши выводы о цифровом оборудовании, а также наши наблюдения за наиболее успешными игроками как в производственной, так и в смежных отраслях с аналогичными проблемами цифровизации показывают эффективные подходы и перспективы, которые могут принять начинающие производственные компании:
- Принять вызов. Цифровизация — это вопрос «как», а не «если». Тем не менее, лишь несколько компаний-производителей машин и оборудования полностью осознали и приняли цифровой вызов и активно пытаются направить будущее развитие своей организации в этом направлении.
- Двигайтесь быстрее. Примите тот факт, что скорость превосходит синергию в первом раунде. Начните с основ, то есть подключения и интеллектуальных датчиков, чтобы действовать заранее.
- Сделайте осознанный выбор. Решите, следует ли (и как далеко) расти в стеке промышленной автоматизации: вплоть до уровня интеграции MES, создания сложной аналитики или полного предложения облачной платформы на основе IoT. В качестве альтернативы или дополнительно компании могут искать привлекательные новые области цифровых технологий (например, автономное вождение, робототехника, искусственный интеллект) и выбирать одну из них в качестве следующего игрового поля (как это сделала Intel).
- Всегда ориентируйтесь на клиента. Никогда не забывайте о покупателе и, начав с анализа болевых точек, начните продумывать все возможные изменения на пути клиента. Это особенно важно для производственных или машиностроительных компаний, которые могут быть склонны строить свои новые цифровые путешествия на своих сильных сторонах в качестве технических инженеров, но упускают из виду важность отношений с клиентами.
- Расширяйте возможности с помощью следующих двух принципов: продолжайте работать над новыми бизнес-моделями, т. е. моделями, основанными на потенциале цифровизации в Промышленности 4.0/цифровых производственных средах, и продолжайте бросать вызов существующим. Кроме того, мыслите масштабно и переходите от продажи оборудования к продаже услуг (например, диагностического обслуживания) и продаже и гарантированию результатов (вместо продуктов).
«Запачкать руки» путем запуска цифровой трансформации вашего предприятия и тестирования первых перспективных приложений цифрового оборудования в вашей компании не требует длительной подготовки или крупных предварительных инвестиций. Внедрение дает преимущество получения первых результатов и помогает вашей компании быстро продвинуться на пути к тому, чтобы стать организацией, которая использует весь потенциал цифрового оборудования. Чего ты ждешь?
Будьте в курсе ваших любимых тем
|
||||||||||||||||||||||||||||||||||||||||||||||
|
||||||||||||||||||||||||||||||||||||||||||||||
Ткацкий станок TC2| Цифровой ткацкий станок| Цифровое ткачество Норвегия
Ткацкий станок TC2
Контроллер нити 2 (TC2) представляет собой цифровой жаккардовый ткацкий станок производства Tronrud Engineering Moss, Dept. Digital Weaving Norway. Ткацкий станок TC2 — это инструмент, который помогает на «инновационном или творческом» этапе изготовления ткани и предназначен в первую очередь для целей отбора образцов, быстрого прототипирования или разработки продукта. Многие из наших клиентов также используют ткацкий станок для создания разовых/специальных заказов (например, художники по текстилю) и массовой настройки. Ткацкий станок управляется компьютером и управляется вручную, потому что он предназначен для работы создателем/дизайнером/ткачом.
TC2 позволяет пользователю изготовить образец идеального качества с желаемыми волокнами, структурой переплетения, плотностью основы и утка и цветом – всего за несколько часов! Изменения мгновенны; запускать и останавливать столько раз, сколько требуется, без проблем. Дело в том, что с ткацким станком TC2 вы получаете образцы не позднее, чем «на следующий день», и вы доставляете их туда, где находятся лица, принимающие решения/клиенты. Можно сделать последовательность образцов, варьируя, например, масштаб рисунка, структуры переплетения, плотность основы и утка/цветовые сочетания и т. д. С помощью ткацкого станка TC2 можно оценить дизайн визуально, а также реальную руку или ощущение от ткани. фабрика.
Посмотрите, как работает технология TC2!
Какие материалы можно использовать для плетения на TC2?
На TC2 можно использовать широкий спектр волокон, но в целом Digital Weaving Norway предостерегает от типичных напольных ковров из-за тяжелых/жестких материалов и высокой плотности проволок. Все волокна животного и растительного происхождения будут работать на ткацком станке TC2, если пряжа не очень коротко сшита и/или имеет небольшое количество скручиваний на единицу длины: руки, его нельзя использовать в качестве материала основы. Лен, хлопок, конопля, шелк и шерсть, шерсть животных, таких как лама, альпака и верблюжья шерсть, отлично подойдут, а также вискоза и синтетика. У DWN есть клиенты, работающие с такими материалами, как леска, проволока из хирургической стали, медная проволока, электрические шнуры с различными покрытиями, резинки из полиуретана/лайкры, полипропиленовые канаты, бумажная пряжа и т. д.
Как сделать варп для ТС2?
Есть два способа: первый — способ ручных ткачей, который заключается в использовании вращающейся сновальной мельницы, а второй — отправить навивку на фабрику, где они могут использовать сновальную машину для передачи основы.
Требования к программному обеспечению:
Проекты для TC2 можно создавать на следующих программных платформах:
- Photoshop (или другие программы обработки изображений) плюс Loom Controller (драйвер ткацкого станка)
- Все промышленные программы Jacquard, представленные на рынке, могут сохранять свои карточные файлы в одном из следующих форматов: JPG, TIFF, BMP и WIF.
Программное обеспечение контроллера также работает под Linux и MAC. Программное обеспечение Loom Driver включено в комплект, но не содержит компьютерных или дизайнерских программ, таких как Photoshop.
Реклама:
Стоимость станка зависит от размера и количества модулей, которые выбирает заказчик. Ткацкий станок выпускается в трех размерах: 2-Wide, 3-Wide и 4-Wide, что позволяет использовать ширину ткани 28″, 43″ и 56″ соответственно. После того, как заказчик определился с размером рамы ткацкого станка, следующим шагом является выбор количества модулей, которое определяется шириной переплетения и плотностью ткани.
