Как создать радиоуправляемый автомобиль на базе Arduino. Какие компоненты нужны для сборки робота-машинки. Как запрограммировать Arduino для управления двигателями и приема команд с пульта. Какие преимущества дает использование Arduino в робототехнике.
Компоненты для сборки радиоуправляемого автомобиля на Arduino
Для создания радиоуправляемого автомобиля-робота на базе Arduino потребуются следующие основные компоненты:
- Плата Arduino (например, Arduino Uno или Arduino Nano)
- Шасси автомобиля с моторами
- Драйвер двигателей (например, L298N)
- Радиомодуль для приема команд (например, nRF24L01)
- Пульт дистанционного управления с радиопередатчиком
- Батарейный отсек или аккумулятор
- Провода для соединений
Дополнительно можно добавить различные датчики, например ультразвуковой дальномер для обнаружения препятствий.
Схема подключения компонентов к Arduino
Рассмотрим базовую схему подключения основных компонентов радиоуправляемого автомобиля к Arduino:

- Подключите драйвер двигателей L298N к Arduino:
- IN1, IN2, IN3, IN4 к цифровым пинам Arduino
- ENA, ENB к ШИМ-пинам Arduino
- GND к GND Arduino
- Подключите моторы к выходам драйвера L298N
- Подключите радиомодуль nRF24L01 к Arduino:
- CE, CSN к цифровым пинам Arduino
- SCK, MOSI, MISO к соответствующим пинам SPI интерфейса Arduino
- VCC к 3.3V Arduino
- GND к GND Arduino
- Подключите питание от батареи к Arduino и драйверу двигателей
Точная схема подключения может отличаться в зависимости от используемых компонентов.
Программирование Arduino для управления автомобилем
После сборки аппаратной части необходимо запрограммировать Arduino для приема команд с пульта и управления двигателями. Рассмотрим базовый алгоритм работы:
- Инициализация радиомодуля и настройка пинов для управления моторами
- В бесконечном цикле:
- Проверка наличия данных от радиомодуля
- Если есть данные — декодирование команды
- Выполнение соответствующего действия (движение вперед/назад/поворот)
Вот пример базового кода для Arduino:

Преимущества использования Arduino в робототехнике
Arduino имеет ряд преимуществ для создания роботов и радиоуправляемых устройств:
- Простота использования и программирования
- Большое сообщество и множество готовых библиотек
- Низкая стоимость и доступность компонентов
- Гибкость и возможность расширения функционала
- Возможность быстрого прототипирования
Благодаря этим преимуществам Arduino стала популярной платформой для обучения робототехнике и создания любительских проектов.
Возможные улучшения радиоуправляемого автомобиля
После создания базовой версии радиоуправляемого автомобиля на Arduino можно реализовать различные улучшения:
- Добавление ультразвукового дальномера для обнаружения препятствий
- Реализация автономного режима движения
- Добавление камеры для передачи видео
- Использование гироскопа/акселерометра для стабилизации
- Добавление светодиодной индикации
- Реализация более сложных алгоритмов управления
Эти улучшения позволят сделать автомобиль более функциональным и интересным для изучения робототехники.
Советы по отладке и устранению неисправностей
При создании радиоуправляемого автомобиля на Arduino могут возникнуть различные проблемы. Вот несколько советов по их устранению:
- Проверьте все соединения и убедитесь, что компоненты подключены правильно.
- Используйте серийный монитор Arduino IDE для отладки. Выводите отладочные сообщения в ключевых точках программы.
- Тестируйте каждый компонент по отдельности перед полной сборкой.
- Убедитесь, что напряжение питания соответствует требованиям всех компонентов.
- Проверьте, что радиомодули на пульте и автомобиле настроены на один канал.
- При проблемах с движением проверьте правильность подключения моторов и настройки драйвера.
Помните, что создание робота — это итеративный процесс, требующий терпения и экспериментов.
Заключение: перспективы развития проекта
Создание радиоуправляемого автомобиля на базе Arduino — это отличный стартовый проект для изучения робототехники. Он позволяет на практике освоить основы электроники, программирования микроконтроллеров и механики.
В дальнейшем этот проект может быть развит во многих направлениях:
- Создание более сложных роботов с манипуляторами
- Разработка алгоритмов компьютерного зрения и машинного обучения
- Интеграция с мобильными приложениями и облачными сервисами
- Применение в образовательных целях для обучения программированию и робототехнике
Главное — не останавливаться на достигнутом и продолжать экспериментировать и учиться новому!
Дистанционное управление и мониторинг
Дистанционное управление и мониторинг 28%467 руб
Радиомодуль RMC007 «Реле с ИК пультом»
289 руб
Модули RF002. Комплект из приёмника и передатчика для Arduino на 433,92 МГц
620 руб
Модуль RF044. LoRa SX1278 RA-01. Беспроводной модуль до 10 км
396 руб
Модуль RF055. Приёмник и передатчик на 4 канала
1 272 руб
RMC002. Выключатель дистанционный на радиочастоте
29%
850 руб
BY-2T. Двухканальное дистанционное управление с плавной регулировкой (dimmer) 1 Квт
600 руб
Набор RF011. Четырёхканальная система радиоуправления. 4-ре не зависимые радиокнопки для беспроводных систем управления, Arduino
4-ре не зависимые радиокнопки для беспроводных систем управления, Arduino
8 630 руб
Ethernet модуль KBX-100
1 050 руб
Субминиатюрный выключатель дистанционный четырёхканальный на радиочастоте. Модуль RMC005
2 250 руб
Выключатель дистанционный RC-4-12-K400С на 4 нагрузки на радиочастоте
600 руб
Пульт RMC014. Дополнительный пульт к дистанционке RMC013
812 руб
Модуль RF056. Приёмник и передатчик на 6 каналов
Вы смотрели
Бренд, изготовитель
- Радио КИТ (2)
- DIY (39)
- Мастер КИТ (2)
- Beamish (2)
- PosсoPeak (2)
- PoscoPeak (1)
- REXANT (4)
- KernelChip (3)
Быстрый заказ
Фамилия:
Телефон:
E-mail:
Подписаться на новости магазина
Комментарий:
схема управления Arduino, дистанционное регулирование шагового двигателя
Содержание
- 1 Дистанционное управление трехфазным двигателем: шаговые электродвигатели (ШЭ), конструкция, разновидности
- 1.
 1 Конструкция агрегатов
1 Конструкция агрегатов - 1.2 Основные характеристики
- 1.3 Разновидности
- 1.
- 2 Схемы управления различными трехфазными силовыми шаговыми двигателями
- 2.1 Полношаговый способ
- 2.2 Полушаговый
- 2.3 Параметрическая методика
- 2.4 Мониторинг работоспособности напряжением
- 2.5 Контроль путем переключения секций статорных обмоток
- 2.6 Технология частотной регулировки
Управление трехфазным двигателем – сложное мероприятие, требующее установку дополнительных компонентов, использование специальных алгоритмов. Схемы предполагают несколько способов регулирования работы трехфазных, пошаговых моторов.
Асинхронный трехфазовый шаговый двигатель – агрегат, активно использующиеся в промышленном оборудовании повышенной сложности. Данные силовые установки выдерживают длительную и интенсивную эксплуатацию в тяжелейших условиях. Это позволяет осуществлять технические процессы различной спецификации и нагрузки. Управление трехфазным двигателем бывает параметрическим, или от индивидуального преобразователя. Первый тип предполагает варьирование параметров цепей асинхронного двигателя.
Управление трехфазным двигателем бывает параметрическим, или от индивидуального преобразователя. Первый тип предполагает варьирование параметров цепей асинхронного двигателя.
Трехфазные асинхронные электродвигатели – универсальные агрегаты, которые можно использовать для работы промышленных манипуляторов. Они отличительны экономической целесообразностью. Также их можно подключать к однофазной сети электроснабжения, но делать это достаточно сложно. Сюда же стоит отнести специфику регулирования параметров установок, включая их частоту, при подключении к однофазной сети. Использование нескольких технологий регулировки работы электродвигателей позволяет обустроить производственные инфраструктуры любой классификации.
Дистанционное управление трехфазным двигателем: шаговые электродвигатели (ШЭ), конструкция, разновидностиПеред тем, как организовать мониторинг работы трехфазным шаговым двигателем, нужно подробней изучить внутреннюю конструкцию силового агрегата, ознакомиться с классификациями установки. Дело в том, что пусть последние и имеют базовые сходства, но специфика управления конкретным асинхронным трехфазным мотором может существенно отличаться.
Дело в том, что пусть последние и имеют базовые сходства, но специфика управления конкретным асинхронным трехфазным мотором может существенно отличаться.
Поэтому к вопросу регулирования работы высокосложного оборудования необходимо подходить с максимальной ответственностью. Иначе, вместо эффективного производства будут проблемы с работой технологического оснащения.
Согласно ГОСТ-у 27471-87, шаговый мотор – электрический двигатель, находящиеся во вращении с дискретными угловыми перемещениями ротора. Последние формируются за счет импульсов, которые поступают от микроконтроллера управления. Такие типы установок отличительны наличием трехфазной обмотки статора.
Принцип действия заключается в непосредственном преобразовании управляющего сигнала, состоящего из последовательности импульсов, в фиксированный угол перемещения вала или в линейное перемещение без использования датчиков обратной связи. Особенность функционирования упрощает конструкцию привода, заменяя замкнутую систему следящего привода, в разомкнутую. Последняя удешевляет устройство, делает агрегат эффективней, увеличивает точность работы за счет четкой фиксации ротора (он же вращающиеся элемент (ВЭ)).
Последняя удешевляет устройство, делает агрегат эффективней, увеличивает точность работы за счет четкой фиксации ротора (он же вращающиеся элемент (ВЭ)).
Нюанс: Шаговые установки имеют более низкую точность, если сравнивать их с серводвигателями. Но они не лишены преимуществ таких, как низкая стоимость, простое управление двигателями постоянного тока.
Конструкция агрегатовУстановки, как и все электрические моторы, состоит из неподвижной и вращающейся частей. Первая – статор, а вторая – ротор. Шаговые установки более надежные и практичные ввиду того, что внутренняя конструкция не имеет контактных колец и щеточно-коллекторного узла. ВЭ оснащен выраженными полюсами, зубьями. Реактивный ШЭ оборудован ротором, произведенным с использованием магнитомягкого материала. Гибридные шаговые моторы оснащен составным ВЭ, который имеет полюсные наконечники.
Совет: Чтобы определить наличие постоянных магнитов, нужно осуществить вращение обесточенного мотора. Если во время этого возникает фиксирующий момент/происходят пульсации, тогда конструкционное исполнение предполагает установку постоянных магнитов.
Если во время этого возникает фиксирующий момент/происходят пульсации, тогда конструкционное исполнение предполагает установку постоянных магнитов.
Касательно статора (неподвижного элемента), то внутри присутствует сердечник с полюсами. Изготовление предусматривает ламинированные листы электротехнической стали, произведенные методом штамповки. Данный материл снижает объем вихревых токов, уменьшает нагрев. Неподвижная часть, как правило, имеет от 2 до 5 фаз.
Основные характеристикиСпецифика эксплуатации шаговых силовых агрегатов не предусматривает непрерывное вращение – паспортные данные не имеют параметры мощности. Оборудование имеет низкую, по сравнению с другими, мощность. Определяющей характеристикой является роторный шаг, т.е. показатель углового перемещения, который соответствует одному управляющему импульсу.
ШЭ совершает разовый шаг за определенную единицу времени при варьировании управляющих импульсов. На объем шага ВЭ воздействуют:
- количество обмоток – определяется производителем;
- полюсы и зубья.

Отличия конструкции влияют на величину шага. Последняя корректируется в диапазоне 90 – 0,75 градусов. Применение определенного блока управления с соответствующей методикой контроля асинхронным трехфазным двигателем может еще уменьшить шаг, если этого требует технический процесс.
РазновидностиВ зависимости от специфики эксплуатации существуют несколько основных классификаций шаговых двигателей (ШД). Они подходят для решения задач любой сложности, отличаются конструкционным исполнением, имеют схожий принцип работы и недостатки – пониженная мощность, невозможность непрерывного вращения. Оснащены различными принципами управления трехфазным двигателем блоком ардуино.
Реактивный ШДПредставляет собой синхронный мотор. Неподвижная часть оборудована шестью полюсами и тремя фазами по две на каждый полюс. У вращающиеся части четыре полюса. Роторный шаг (угловое перемещение) составляет 30 градусов. Отличительная особенность – полное отсутствие фиксирующего/тормозящего момент в отключенном состоянии.
Отличия:
- задействуют, если необходим большой коэффициент углового перемещения;
- ротор выполнен из магнитомягкого материала;
- сложная конструкция и дешевизна;
- нет фиксирующего момента;
- большой угол шагового перемещения.
Подключение статорных ваз последовательным способом способствует формированию магнитного поля. Оно вращается, а за ним и ротор. Ввиду меньшего количества полюсов, ВЭ за один шаг проходит меньший угол, чем статор. Изменение направления вращения происходит за счет варьирования коммутационных схем статорных обмоток.
ШД с постоянными магнитамиАгрегат оснащен подвижной частью на постоянных магнитах. Данная классификация создает увеличенные моменты вращения. Присутствует надежная фиксация при отключении управляющего сигнала. Но есть и недостаток – большой шаговый угол (7,5 – 90). Аргументируется тем, что крайне сложно производить ВЭ с постоянными магнитами, имеющий значительное количество полюсов.
Обмотки, нередко, имеют ответвления. Различают:
- униполярный;
- биполярный ШЭ.
Первый отличителен одной обмоткой, расположенной на фазе, а ответвление в центре. Все секции запускают по отдельности. Расположение полюсов магнитного поля варьируется без непосредственного воздействия на направление тока. При этом коммутационная схема может выполняться на одном транзисторном элементе под каждую обмотку. Из преимуществ – простое управление, дешевый способ точного углового перемещения.
Второй имеет одну обмотку на фазу. В отличие от предыдущего, изменение магнитной полярности происходит путем варьирования направления тока. Следовательно, схема управления отличается более высокой сложностью. Имеет два вывода на фазу, но отсутствует общий вывод. Биполярные моторы имеют высокую мощность и объем, что делает их эффективными для осуществления определенных технических процессов.
Гибридные ШЭСочетают в себе преимущества реактивных моторов и установок с постоянными магнитами. Агрегаты отличительны меньшим углом шага. Вращающиеся элемент гибридов выполнен цилиндрическим постоянным магнитом (ПМ). Процесс намагничивания происходит вдоль продольной оси, на которой размещены радиальные зубья.
Агрегаты отличительны меньшим углом шага. Вращающиеся элемент гибридов выполнен цилиндрическим постоянным магнитом (ПМ). Процесс намагничивания происходит вдоль продольной оси, на которой размещены радиальные зубья.
Особенности:
- меньший шаг, чем у реактивной установки и оборудования с постоянными магнитами;
- ротор – ПМ с тонкими зубьями;
- статорные полюсы оснащены аналогичными с ВЭ зубьями.
Неподвижная часть мотора примечательна 2-4 фазами. Они распределены между магнитными полюсами. Обмотки с центральным ответвлением, что предоставляет возможность униполярного управления. Изготовление обмотки с помощью бифилярной намотки. Полюсные зубья по габаритам соответствуют роторным. В соседних фазах идет смещение относительно друг друга на одну четверть деления.
Схемы управления различными трехфазными силовыми шаговыми двигателямиСпецифика контролирования работоспособности ШД с ПМ заключается в подключении сфазированного переменного тока.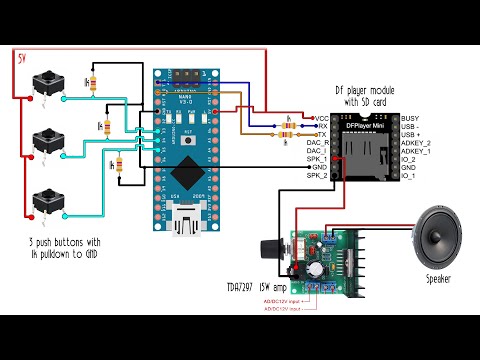 Как показывает практика, последний – сигнал прямоугольной формы, который генерируется источником постоянного тока. Биполярный комплекс управления создает прямоугольный сигнал, изменяющиеся по направлению от плюса к минусу, а униполярный – изменяет направление магнитного потока одновременным воздействием двух сигналов. Они поочередно подаются на противоположные выводы.
Как показывает практика, последний – сигнал прямоугольной формы, который генерируется источником постоянного тока. Биполярный комплекс управления создает прямоугольный сигнал, изменяющиеся по направлению от плюса к минусу, а униполярный – изменяет направление магнитного потока одновременным воздействием двух сигналов. Они поочередно подаются на противоположные выводы.
Существуют несколько способов управления двигателями, имеющие свои отличительные особенности. Первый – контроль посредством волнового управления. Представляет собой простейшую технологию с одновременным возбуждением всего лишь одной обмотки. Недостаток – формирование далеко не самого максимального момента.
ШД с ПМ имеет различный метод соединения статорных обмоток. Для взаимодействия с униполярным агрегатом нужна только одна полярность, что облегчает процесс контроля. Но, даже с учетом этого, требуется создание 4-х сигналов.
Магнитное поле – один из основных аспектов, необходимых в осуществлении работы ШД, формируется обоими способами (униполярным, биполярным). Но касательно первого – нужно наличие центрального ответвления. Шаговое силовое оборудование, имеющее четыре вывода, управляется исключительно биполярной технологией.
Но касательно первого – нужно наличие центрального ответвления. Шаговое силовое оборудование, имеющее четыре вывода, управляется исключительно биполярной технологией.
Соединение восмивыводных установок:
- униполярным способом;
- биполярной технологией, но при условии последовательного соединения. Примечателен высокой индуктивностью, малым током обмоток;
- биполярное параллельное соединение – обратный вышеупомянутому способу результат, т.е. выше ток, ниже индукция;
- с одной фазной обмоткой биполярным способом. Данное соединение отличительно тем, что используются 50% обмоток. Это снижает некоторые технические характеристики.
Для шестивыводного мотора можно задействовать униполярную методику, но при игнорировании центральных выводов возможно биполярное управление. С агрегатом, оснащенным пятью выводами, можно взаимодействовать униполярным методом. Обусловлено тем, что центральный вывод объединяет фазы.
Полношаговый способЭлектродвигатели, процесс управления которым осуществляется, учитывая полношаговую методику, отличительны более высоким моментом. Усиление происходит путем использования сразу нескольких обмоток. При этом шаг аналогичный волновому. Униполярный контроль нуждается в двух управляющих сигналах одинаковой полярности для каждого генерируемого биполярного сигнала.
Усиление происходит путем использования сразу нескольких обмоток. При этом шаг аналогичный волновому. Униполярный контроль нуждается в двух управляющих сигналах одинаковой полярности для каждого генерируемого биполярного сигнала.
Однополярное управление – менее сложный, и более экономически выгодный метод регулирования функциональных возможностей. Для увеличения момент проводится дополнительная модернизация схемы – актуально, когда осуществляются сложные технические процессы на производстве.
ПолушаговыйКак видно из названия, роторный шаг разделяется по 50%. Данная методика примечательна большим качеством позиционирования. Сочетает (комбинирует) волновое и полношаговое технологии. Снабжение электричеством поочередное – подпитывается одна обмотка, а потом – две. Количество шагов увеличивается вдвое, что гарантирует преимущества при проведении определенных технических процессов на предприятии.
Параметрическая методикаПиковое скольжение почти не зависит активного сопротивления неподвижного элемента мотора. Добавление еще одного сопротивления в цепь показатель незначительно уменьшается. Касательно момента, то здесь все иначе – он может существенно снизиться. Итог – механическая характеристика видоизменяется.
Добавление еще одного сопротивления в цепь показатель незначительно уменьшается. Касательно момента, то здесь все иначе – он может существенно снизиться. Итог – механическая характеристика видоизменяется.
Сопоставив вышеупомянутый итог с паспортной характеристикой агрегата, можно сказать, что внедрение вспомогательного сопротивление оказывает малое воздействие на скоростной параметр. С учетом стабильного неизменяемого момента скорость практически не снижается. Малая отзывчивость управления делает параметрическую методику практически неиспользуемой ввиду низкой эффективности.
Установка индуктивного сопротивления имеет аналогичный с реактивным результат – малая эффективность. Наблюдается незначительное снижение скольжения, а моторный момент теряется существенней.
Интересно: Добавление сопротивления осуществляется, когда нужно повлиять на пусковой ток. Для этого задействуют дроссели (индукционное сопротивление), тиристоры (активное сопротивление) или пользуются симистором. Нужно учесть, что это уменьшает критический и пусковой моменты мотора. Поэтому пуск в таких условиях будет происходить, если статический пуск находится на малой отметке. Такое решение актуально в моторе с фазным ротором.
Нужно учесть, что это уменьшает критический и пусковой моменты мотора. Поэтому пуск в таких условиях будет происходить, если статический пуск находится на малой отметке. Такое решение актуально в моторе с фазным ротором.
Работа на низких скоростях и на большом статическом моменте провоцирует нестабильность скорости. Значительная вариативность характеристик вызывает значительные скачки скорости. Плавный разгон обеспечивается производством параллельного подключения реостата с индуктивной катушкой и роторными кольцами.
Параметрическое управление трехфазными шаговыми двигателями имеет неприятное отличие – весомые потери энергии. Энергия, возникающая при скольжении, проходит через зазор между подвижной и статической частями. Далее, преобразуется в механическую, происходит нагрев сопротивления. Вся энергия расходуется во вторичных контурах реостата.
Такой тип контроля задействуют при кратковременном снижении скорости, если этого требует технический процесс. Может использоваться в качестве основного способа регулировки, но, когда управляющие процессы тождественные пуску и торможению. Наиболее распространенные примеры – подъемные устройства.
Наиболее распространенные примеры – подъемные устройства.
Применение данного метода способствует сохранению механических характеристик, моменты снижаются. Изменения последних пропорциональны квадрату напряжения. Стандартные конструкции силового оборудования ограничивают диапазон регулировки работоспособности. Повышение параметра возможно в установках с большим скольжением. Есть отрицательный нюанс – нарушение стабильной работы. Исправить эту проблему можно эксплуатацией замкнутой системы, она же выравнивает скорость.
Регулярные перегрузки в процессе эксплуатации вынуждают мотор работать в предельной характеристике. Это вызывает существенный износ компонентов оснащения, снижение скорости. Основным регулятором выступает магнитный пускатель, тиристорный преобразователь. Последний, обычно, осуществляет работу в импульсном режиме. На статорных зажимах асинхронного мотора сохраняется средний показатель напряжения, который крайне необходим для стабилизации скорости.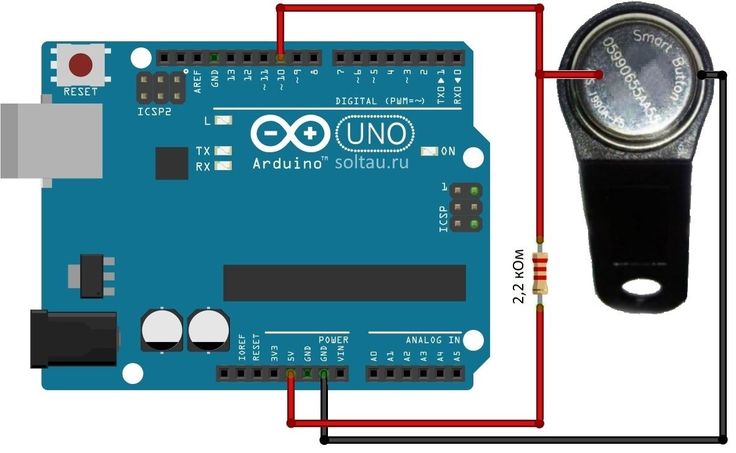
Важно: Для глубокого регулирования напряжения задействуют трансформатор (Т). Но это крайне затратно, не всегда целесообразно ввиду недостаточного обеспечения элементами качества контроля. Эксплуатация Т делает возможным только ступенчатое варьирование напряжения. При этом дистанционное управление или ввод автоматической системы крайне затруднительно и затратно. Трансформаторы, как правило, использую с целью ограничения пусковых параметров высокомощных установок.
Контроль путем переключения секций статорных обмотокВ производстве используется оборудование, не требующее плавного регулирования, и, функционирующее на различных скоростях. Управление осуществляется посредством привода, предоставляющего дискретное/ступенчатое варьирование параметров. Представители таких установок – подъемники, взаимодействующие с металлами и древесными массивом, и т.д.
Некоторые промышленные процессы могут требовать ограничение скоростей вращения. Это задача выполняется многоскоростными короткозамкнутыми моторами. Обмотка производит переключение пар полюсов. Они бывают:
Обмотка производит переключение пар полюсов. Они бывают:
- с несколькими обмотками, расположенными в пазах неподвижных и вращающихся частей;
- с одной обмоткой, с переключающимися секциями.
Первые проигрывают последним в плане технических характеристик и экономической целесообразности. В них крайне неэффективно эксплуатируются статорные обмотки, что снижает КПД работы. Следовательно, более распространены моторы с одной обмоткой.
Технология частотной регулировкиЕсть нюансы, накладывающие ограничения на контролирование мотора. Плавное управление скоростями, которые находятся в широких пределах, с сохранением жестких характеристик проблематично. Оно возможно только при условии частичного контроля. Воздействуя на питающий ток (его частоту), изменяется скорость вращательного движения ВЭ.
Применение методикой предусматривает предварительную установку частотного преобразователя, способного обеспечивать изменение частоты питающей сети в непрерывном режиме и в широких пределах.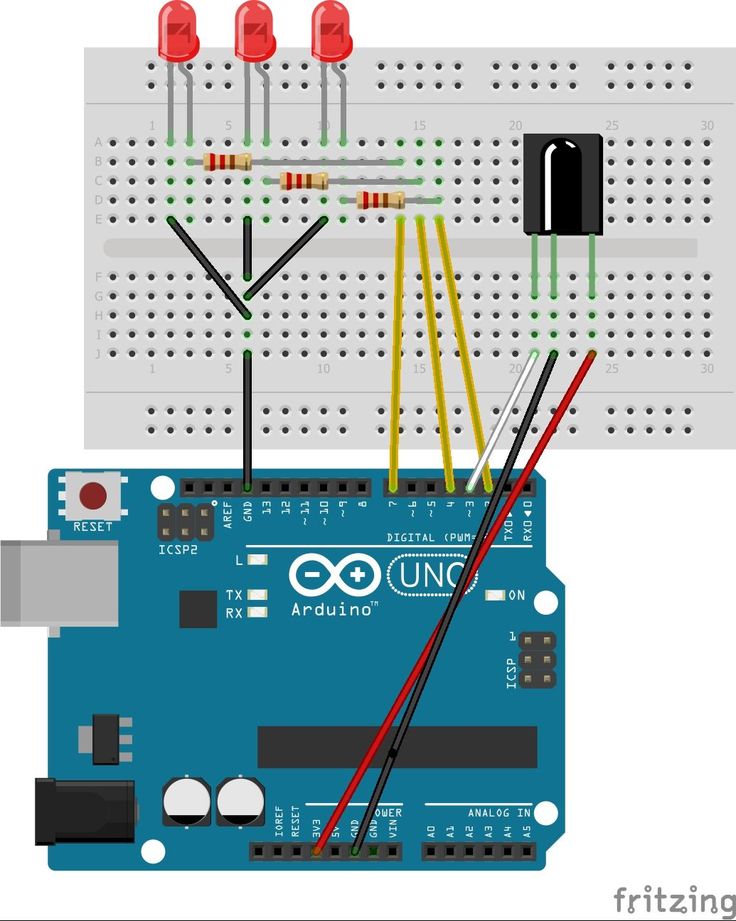
Интересно: Производство современных полупроводниковых элементов позволило создать частотный преобразователь, на постоянной основе взаимодействующий с агрегатами повышенной мощности, исполнительными моторами приводов, с сервоприводами и следящими комплексами.
Сложность частотной регулировки – не финальная проблема. Трудности возникают с осуществлением одновременного управления частотной, напряжением. Изменение частоты в меньшую сторону для снижения скорости, понижения напряжения сети вызывает сложность сохранения равновесия ЭДС. Данная неприятность решается увеличением показателя магнитного потока. Магнитная цепь насыщается, ток постепенно нарастает. Итог – нормальное функционирование асинхронного мотора с частотным управлением, сохранением напряжения попросту невозможно.
Уменьшение частоты для стабилизации магнитного потока производится со снижением уровня напряжения. Это говорит о том, что такой тип мониторинга, предполагающий управление частотой трехфазного шагового оборудования — двигателя, примечателен наличием нескольких каналов регулировки.
Создание автомобиля с дистанционным управлением с помощью Arduino
Презентация автомобиля-робота
Автомобиль-робот — это тип робота, который предназначен для передвижения на колесах или гусеницах, как транспортное средство. Обычно он управляется микроконтроллером, таким как Arduino или Raspberry Pi, и может быть запрограммирован на перемещение, определение среды и выполнение различных задач.
Автомобиль-робот может быть построен с использованием множества различных компонентов и технологий, в зависимости от конкретного применения и конструкции. Основные компоненты робот-автомобиль включает в себя шасси, колеса или гусеницы, микроконтроллер и некоторый тип источника питания, например батареи. Дополнительные компоненты могут включать в себя датчики, такие как ультразвуковые датчики, инфракрасные датчики или камеры, для восприятия окружающей среды и исполнительные механизмы, такие как двигатели, для управления движением робота.
Существуют разные типы автомобилей-роботов , некоторые из них управляются с помощью пульта дистанционного управления, другие имеют возможность автономно перемещаться с помощью датчиков и алгоритмов. Автономный 9Машины-роботы 0005 можно запрограммировать так, чтобы они следовали по заданному пути, избегали препятствий или даже выполняли такие задачи, как картографирование и исследование.
Сборка автомобиля-робота может быть веселым и образовательным проектом, а также хорошим способом узнать о робототехнике, электронике и программировании. Однако важно отметить, что создание автомобиля-робота может быть сложным и трудоемким процессом, требующим знаний и опыта в области электроники, программирования и механики. Кроме того, важно убедиться, что 9Робот-автомобиль 0005 безопасен в эксплуатации, и его следует тщательно протестировать перед использованием.
Презентация радиоуправляемой машины с Arduino
Радиоуправляемая машинка с Arduino o представляет собой тип роботизированной машины , которая управляется микроконтроллером Arduino и устройством дистанционного управления. Arduino получает сигналы от пульта дистанционного управления и использует их для управления движением автомобиля .
Arduino получает сигналы от пульта дистанционного управления и использует их для управления движением автомобиля .
Для сборки пульта дистанционного управления автомобиля с Arduino, вам потребуются следующие компоненты:
- Микроконтроллер Arduino, такой как Arduino Uno или Mega .
- Моторы и колеса для обеспечения движения автомобиля
- Драйвер двигателя для управления двигателями
- Приемник дистанционного управления для приема сигналов от пульта дистанционного управления
- Аккумуляторы для питания автомобиля
- Шасси для всех компонентов
- Провода для соединения всего вместе
Плата Arduino должна быть запрограммирована на получение сигналов от приемника дистанционного управления, и на основе полученных сигналов она будет управлять движением двигателей, отправляя сигналы драйверу двигателя. Пультом дистанционного управления может быть любое устройство, которое может посылать сигналы, такие как инфракрасный или радиочастотный.
Для управления автомобилем на пульте дистанционного управления будут кнопки для перемещения автомобиля вперед, назад, влево и вправо. Программа Arduino будет отвечать за интерпретацию сигналов, посылаемых пультом дистанционного управления, и преобразовывать их в действия, воздействующие на двигатели автомобиля.
Стоит отметить, что сборка автомобиля с дистанционным управлением с помощью Arduino требует знаний в области электроники, программирования и механики, а также надлежащего планирования и проектирования, чтобы обеспечить безопасность эксплуатации автомобиля . Кроме того, система потребует регулярного обслуживания и обновлений, чтобы обеспечить ее правильную работу.
Цель этого проекта:
В этом проекте мы создадим автомобиль с дистанционным управлением (с помощью инфракрасного излучения), которым будет управлять плата Arduino.
Пользователь сможет управлять автомобилем с помощью пульта дистанционного управления в трех направлениях (вперед, вправо и влево) и останавливать его.
необходимые компоненты
Arduino UNO
Плата Arduino UNO представляет собой плату микроконтроллера на основе ATmega328P. Он имеет 14 цифровых входов/выходов, 6 аналоговых входов, кварцевый резонатор 16 МГц, USB-соединение, разъем питания, разъем ICSP и кнопку сброса. Это самая популярная и широко используемая плата среди плат Arduino.
Контроллер Arduino UNO можно запрограммировать с помощью языка программирования Arduino, основанного на C++. Он использует простую и интуитивно понятную среду программирования, что позволяет новичкам легко начать программирование микроконтроллеров.
Плата Arduino UNO может быть подключена к различным датчикам и исполнительным механизмам для управления различными устройствами и выполнения различных задач. Например, его можно использовать для управления двигателями, считывания данных с датчиков, отображения информации на ЖК-экране и связи с другими устройствами через протоколы последовательной связи, такие как I2C и SPI.
Плата Arduino UNO также может питаться от USB-кабеля или внешнего источника питания, что упрощает ее использование в самых разных проектах и приложениях. Он совместим с широким спектром экранов (плат расширения), которые расширяют функциональные возможности платы, такие как Ethernet, WiFi и Bluetooth, и широко поддерживается сильным и активным сообществом, которое предоставляет множество учебных пособий, примеров и библиотек для помочь пользователям получить максимальную отдачу от доски.
Два реле
Реле представляет собой переключатель с электрическим приводом, который можно использовать для управления подачей электроэнергии к двигателю или другому устройству. Реле обычно используется в ситуациях, когда низковольтная цепь управления должна переключать силовую цепь более высокого напряжения.
Когда реле используется для управления двигателем, реле подключается к источнику питания двигателя, а цепь управления подключается к входу реле. Когда схема управления посылает сигнал на реле , внутренний переключатель реле активируется, позволяя питанию поступать на двигатель. Это позволяет цепи управления, которая обычно представляет собой цепь низкого напряжения, управлять цепью высокого напряжения, такой как двигатель.
Когда схема управления посылает сигнал на реле , внутренний переключатель реле активируется, позволяя питанию поступать на двигатель. Это позволяет цепи управления, которая обычно представляет собой цепь низкого напряжения, управлять цепью высокого напряжения, такой как двигатель.
Реле может управляться Arduino или другим микроконтроллером, путем подачи сигнала на вход реле . Это можно сделать, подключив реле к выходному контакту Arduino и написав программу для управления состоянием контакта.
Пульт дистанционного управления
Пульт дистанционного управления — это устройство, позволяющее дистанционно управлять электронным устройством или системой. Пульты дистанционного управления можно использовать для управления широким спектром устройств, таких как телевизоры, кондиционеры, автомобили, роботы и многое другое. Пульты дистанционного управления обычно используют беспроводные технологии, такие как инфракрасный (ИК) или радиочастотный (РЧ), для отправки управляющих сигналов на устройство или систему.
Пульты дистанционного управления обычно используют беспроводные технологии, такие как инфракрасный (ИК) или радиочастотный (РЧ), для отправки управляющих сигналов на устройство или систему.
Пульт дистанционного управления обычно включает в себя набор кнопок или клавиатуру, которые можно использовать для отправки управляющих сигналов на устройство или систему. Эти кнопки или клавиатура обычно помечены функциями, которыми они управляют, такими как питание, громкость, канал или движение. Пульты дистанционного управления также могут включать дополнительные функции, такие как дисплей, микрофон или акселерометр.
Пульт дистанционного управления используется для управления движением и действиями автомобиля-робота
ИК-датчик
KY-032 — это модуль инфракрасного датчика препятствий, который используется для обнаружения препятствий перед роботом или другим устройством. Хотя он в основном используется для обнаружения препятствий, его нельзя использовать напрямую для дистанционного управления. Дистанционное управление означает возможность управлять движением и действиями устройства или системы по беспроводной сети с помощью пульта дистанционного управления или смартфона.
Хотя он в основном используется для обнаружения препятствий, его нельзя использовать напрямую для дистанционного управления. Дистанционное управление означает возможность управлять движением и действиями устройства или системы по беспроводной сети с помощью пульта дистанционного управления или смартфона.
Для удаленного управления автомобилем-роботом, в котором используется модуль датчика препятствий KY-032 , вам потребуется модуль беспроводной связи, такой как радиочастотный (RF) модуль или модуль Bluetooth, чтобы установить беспроводное соединение между автомобиль-робот и устройство дистанционного управления. Беспроводное устройство управления, такое как пульт дистанционного управления или смартфон, будет отправлять управляющие сигналы на автомобиль-робот через это беспроводное соединение.
Микроконтроллер автомобиля-робота, такой как Arduino, должен быть запрограммирован на получение и интерпретацию этих сигналов управления, а затем на управление движением двигателей автомобиля и другими действиями на основе полученных сигналов управления.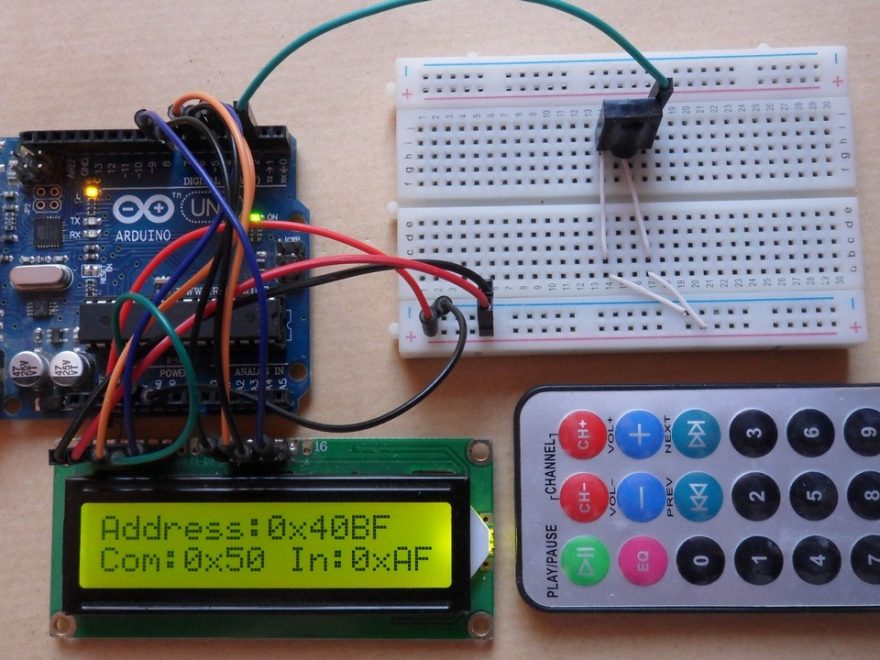 Модуль датчика препятствий KY-032 будет использоваться для обнаружения препятствий перед автомобилем-роботом и отправки сигнала микроконтроллеру для выполнения соответствующих действий, таких как остановка или обход препятствия.
Модуль датчика препятствий KY-032 будет использоваться для обнаружения препятствий перед автомобилем-роботом и отправки сигнала микроконтроллеру для выполнения соответствующих действий, таких как остановка или обход препятствия.
Стоит отметить, что хотя 9Модуль датчика препятствия 0005 KY-032 не используется непосредственно для дистанционного управления, его можно использовать в сочетании с другими компонентами для создания автомобиля-робота с дистанционным управлением. Кроме того, важно убедиться, что автомобиль-робот безопасен и надежен, а беспроводная связь защищена для предотвращения несанкционированного доступа.
Комплект робота для двухколесной машины
Комплект робота для двухколесной машины представляет собой набор компонентов, которые можно использовать для создания небольшого автономного робота, передвигающегося на двух колесах. Эти комплекты обычно включают микроконтроллер, такой как карта ESP32, для управления движениями робота, а также двигатели, колеса и другое оборудование, позволяющее роботу двигаться и перемещаться.
Двухколесный автомобиль Роботы часто используются в качестве учебных пособий, поскольку с их помощью можно обучать основам робототехники, электроники и программирования. Их также можно использовать в качестве платформы для экспериментов с различными алгоритмами управления, датчиками и другим оборудованием.
Этот комплект робота состоит из:
соединительных проводов
Соединительных проводов используются для соединения различных компонентов в электронной схеме. Они позволяют передавать электричество, данные или сигналы между различными устройствами и компонентами.
При подключении проводов к Arduino или другому микроконтроллеру важно обратить внимание на правильную распиновку. Распиновка относится к расположению контактов на микроконтроллере и соответствующей функции каждого контакта. Распиновку Arduino можно найти в документации, предоставленной производителем, или в различных ресурсах, доступных в Интернете.
Тестовая пластина
Тестовая пластина , также известная как испытательное приспособление, представляет собой устройство, используемое для проверки электронных схем и компонентов. Это плата или пластина, предназначенная для удержания и соединения различных компонентов и устройств в определенной конфигурации, что позволяет легко тестировать и измерять их производительность.
Тестовая пластина может использоваться для тестирования различных типов электронных схем и компонентов, таких как микроконтроллеры, датчики и приводы. Обычно он включает в себя разъемы и разъемы для подключения проводов, источника питания и измерительных устройств, таких как мультиметры, осциллографы и источники питания.
Строительство автомобиля
Сборка автомобиля с Arduino
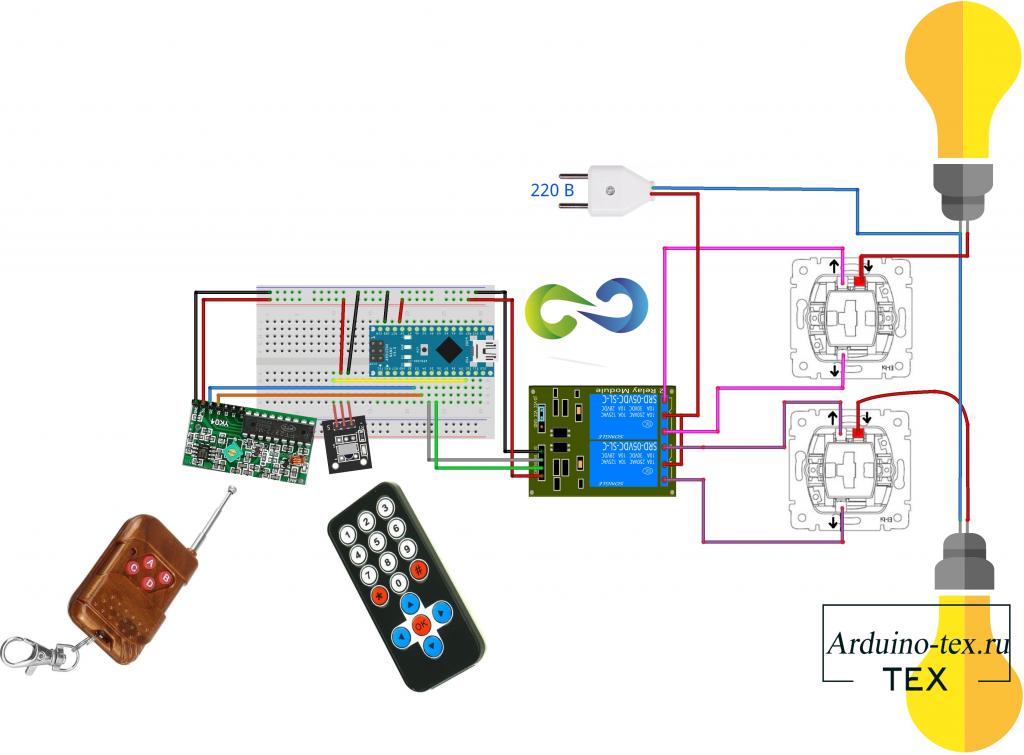
Заливка для монтажа, на peut коннектор:
Для первого реле:
- (S) контакт к контакту 2 Arduino Контакт
- (+) к контакту 3,3 В Arduino Контакт
- (-) к контакту GND Arduino Контакт
- ON к контакту 5V Arduino
Для второго реле:
- S) контакт к контакту 3 Arduino Контакт
- (+) к контакту 3,3 В Arduino Контакт
- (-) к контакту GND Arduino Контакт
- ON к контакту 5V Arduino
Для каждого из двух двигателей:
- первый контакт к контакту COM реле
- второй терминал к контакту GND Arduino
Для ИК-датчика:
- OUT контакт к контакту 4 Arduino Контакт
- (+) к контакту 3,3 В Arduino
- контакт GND к контакту GND Arduino
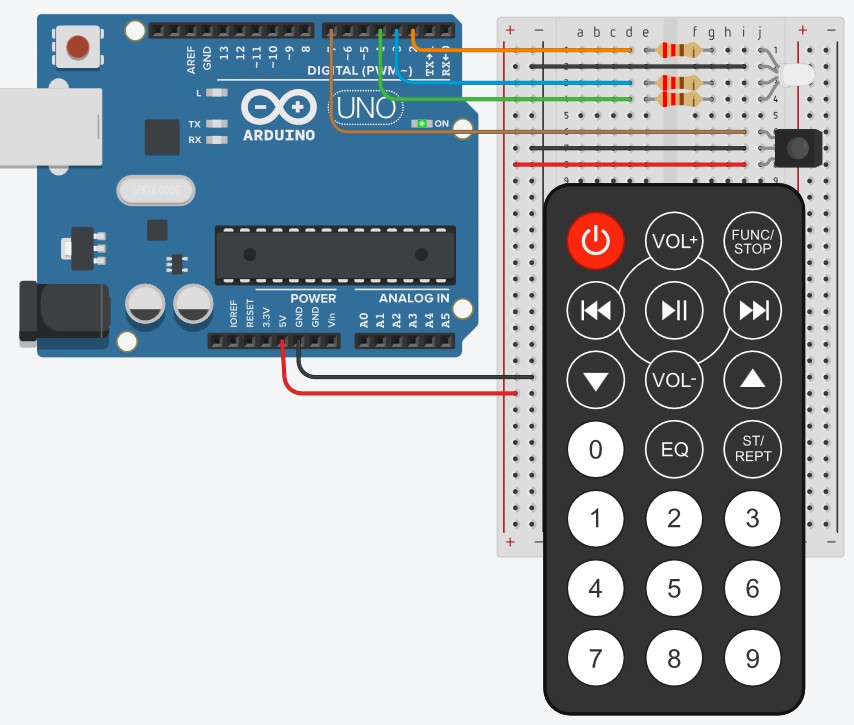
Инфракрасный пульт дистанционного управления, взаимодействующий с Arduino Uno
By EG Projects
В этом небольшом и простом руководстве/проекте я буду соединять ИК (инфракрасный) пульт дистанционного управления с Arduino uno. ИК-пульт, который я собираюсь подключить к Arduino, изготовлен компанией Keyes. Я купил этот модуль на aliexpress по очень низкой цене около 2,5 долларов США с бесплатной доставкой. В комплект входит пара передатчика и приемника. Инфракрасный передатчик имеет форму клавиатуры. Передатчик передает ИК-сигналы с закодированными данными при нажатии определенной кнопки на клавиатуре.
ИК-пульт, который я собираюсь подключить к Arduino, изготовлен компанией Keyes. Я купил этот модуль на aliexpress по очень низкой цене около 2,5 долларов США с бесплатной доставкой. В комплект входит пара передатчика и приемника. Инфракрасный передатчик имеет форму клавиатуры. Передатчик передает ИК-сигналы с закодированными данными при нажатии определенной кнопки на клавиатуре.
Диапазон частот инфракрасного сигнала находится в диапазоне от 430 ТГц до 300 ГГц. Затем эта частота делится на деления. Такие как ближний инфракрасный, коротковолновый инфракрасный, средневолновой инфракрасный, длинноволновый инфракрасный и, наконец, FIR (дальний инфракрасный). Дальний инфракрасный диапазон чаще всего используется в бытовой технике, такой как пульты от телевизора, автомобильная аудиосистема и т. д. Наша пара ИК-датчиков, использованная в проекте, относится к диапазону дальнего инфракрасного диапазона.
Инфракрасный передатчик в клавиатуре передает инфракрасный сигнал на частоте 38 кГц. На стороне приемника у меня есть ИК-приемник tsop1738. Инфракрасный приемник ЦОП1738 принимает инфракрасные сигналы, которые передаются передатчиком на частоте 38 кГц. Цоп1738 не принимает сигнал, а также декодирует данные, присутствующие в передаваемом сигнале, а затем выводит данные.
На стороне приемника у меня есть ИК-приемник tsop1738. Инфракрасный приемник ЦОП1738 принимает инфракрасные сигналы, которые передаются передатчиком на частоте 38 кГц. Цоп1738 не принимает сигнал, а также декодирует данные, присутствующие в передаваемом сигнале, а затем выводит данные.
Удаленный проект Arduino IR — принцип работы
В этом уроке я собираюсь получать нажатия клавиш от инфракрасного передатчика. Декодируйте сигнал, идентифицируйте нажатую клавишу, а затем отобразите конкретную клавишу, нажатую пользователем, на ЖК-дисплее 16 × 2 символа. ЖК-дисплей Character, который я использую, представляет собой ЖК-экран arduino 16×2, который можно установить непосредственно на arduino uno или любую другую стандартную плату arduino. Символьный ЖК-дисплей 16 × 2 Shield взаимодействует в 4-битном режиме с Arduino Uno.
ИК удаленная библиотека Arduino
ИК удаленная библиотека Arduino используется в проекте для декодирования данных, полученных от передатчика. Библиотека IRremote может передавать и принимать инфракрасные сигналы. В этом уроке мы будем принимать только сигнал, передаваемый инфракрасным источником. Пульт, который я использую в этом уроке, показан на рисунке ниже.
Библиотека IRremote может передавать и принимать инфракрасные сигналы. В этом уроке мы будем принимать только сигнал, передаваемый инфракрасным источником. Пульт, который я использую в этом уроке, показан на рисунке ниже.
Инфракрасный пульт Keyes с Arduino Uno
Работающая ИК-библиотека Arduino
Удаленная библиотека Arduino ir использует таймеры Arduino для передачи и приема инфракрасных сигналов. Выводы Arduino с функцией таймера работают на частоте 38 кГц. Затем сигналы данных легко кодируются и декодируются на этих выводах.
Инфракрасный проект Arduino — принципиальная схема
В нашей схеме выходной контакт инфракрасного приемника Tsop1738 подключен к контакту № 3 Arduino Uno. Я использую экран arduino lcd, который можно установить непосредственно на плату arduino uno. Щит экономит мое время на разводку ЖК-дисплея. Принципиальная схема проекта ИК-интерфейса Arduino приведена ниже
Интерфейс ИК (инфракрасного) датчика Arduino
Но если у вас нет экрана, вы также можете вручную подключиться к ЖК-дисплею 16 × 2, если у вас есть автономный ЖК-дисплей. Соединения очень простые. Соедините контакт
Соединения очень простые. Соедините контакт
- ЖК-дисплея RS с цифровым контактом 8 .
- Контакт включения ЖК-дисплея на цифровой контакт 9
- Контакт D4 ЖК-дисплея к цифровому контакту 4
- Контакт D5 ЖК-дисплея к цифровому контакту 5
- ЖК-дисплей D6 к цифровому контакту 6
- Контакт D7 ЖК-дисплея к цифровому контакту 7
- ЖК-дисплей R/W на массу
Для вашего удобства я сделал принципиальную схему автономного ЖК-интерфейса 16×2 с Arduino Uno для этого инфракрасного проекта Arduino. Принципиальная схема приведена ниже
Инфракрасный дистанционный передатчик и приемник Keyes (TSOP1738) с Arduino Uno
Я проверил приведенный выше код Arduino и он работает нормально. Я проверил все кнопки инфракрасных передатчиков, и каждая кнопка правильно передает свой код. Я успешно протестировал передатчик на расстоянии 5 метров. Выше 5 метров сигнал затухает и приемник пропускает сигнал. Одна ошибка, с которой я столкнулся во время тестирования, заключается в том, что передатчик не работает.