Как выбрать подходящий драйвер двигателя для проекта Arduino. Какие преимущества и недостатки у популярных моделей L298N, L293D и HG7881. Как правильно подключить и настроить драйвер двигателя. На что обратить внимание при работе с моторами в Arduino-проектах.
Зачем нужен драйвер двигателя в проектах Arduino
Драйвер двигателя играет ключевую роль в проектах Arduino, использующих моторы. Он необходим по нескольким причинам:
- Arduino не может напрямую управлять большинством двигателей из-за ограничений по току (максимум 40 мА на пин).
- Драйвер позволяет управлять направлением вращения двигателя.
- С помощью драйвера можно регулировать скорость вращения мотора.
- Драйвер обеспечивает гальваническую развязку между Arduino и силовой частью схемы.
Таким образом, драйвер двигателя является необходимым компонентом для создания роботов, автоматизированных систем и других проектов с моторами на базе Arduino.
Сравнение популярных драйверов двигателей для Arduino
Рассмотрим три наиболее распространенных драйвера двигателей для Arduino:
L298N
Преимущества L298N:
- Высокий максимальный ток до 4А
- Возможность управления 2 двигателями
- Встроенный стабилизатор напряжения 5В
- Наличие радиатора для лучшего охлаждения
Недостатки:
- Относительно большие размеры платы
- Высокое падение напряжения (около 2В)
L293D
Преимущества L293D:
- Компактные размеры
- Низкая стоимость
- Простота подключения
Недостатки:
- Небольшой максимальный ток (600 мА на канал)
- Быстрый нагрев при длительной работе
HG7881 (L9110S)
Преимущества HG7881:
- Самые компактные размеры
- Низкое энергопотребление
- Низкая стоимость
Недостатки:
- Отсутствие возможности управления скоростью
- Небольшой максимальный ток (800 мА)
При выборе драйвера следует учитывать параметры используемых двигателей и требования конкретного проекта.
Подключение драйвера L298N к Arduino
Рассмотрим пошаговый процесс подключения популярного драйвера L298N к Arduino:
- Подключите питание драйвера: +Vs к источнику питания двигателей (6-35В), GND к общему минусу.
- Соедините GND драйвера и Arduino.
- Подключите управляющие входы драйвера к Arduino:
- IN1 — к пину D7
- IN2 — к пину D6
- IN3 — к пину D5
- IN4 — к пину D4
- Подключите выходы ENA и ENB к ШИМ-пинам Arduino (например, D9 и D10) для управления скоростью.
- Присоедините двигатели к выходам OUT1, OUT2, OUT3, OUT4.
Программирование Arduino для работы с драйвером двигателя
Для управления двигателями через драйвер на Arduino необходимо написать соответствующий скетч. Вот базовый пример для L298N:
// Определение пинов
const int ENA = 9;
const int IN1 = 7;
const int IN2 = 6;
void setup() {
pinMode(ENA, OUTPUT);
pinMode(IN1, OUTPUT);
pinMode(IN2, OUTPUT);
}
void loop() {
// Вращение вперед
digitalWrite(IN1, HIGH);
digitalWrite(IN2, LOW);
analogWrite(ENA, 200); // Скорость 0-255
delay(2000);
// Остановка
digitalWrite(IN1, LOW);
digitalWrite(IN2, LOW);
delay(1000);
// Вращение назад
digitalWrite(IN1, LOW);
digitalWrite(IN2, HIGH);
analogWrite(ENA, 150); // Меньшая скорость
delay(2000);
}
Этот код демонстрирует базовые операции: вращение вперед, остановку и вращение назад с разной скоростью.
Особенности работы с шаговыми двигателями
Шаговые двигатели требуют особого подхода при использовании с Arduino:
- Для управления шаговыми двигателями рекомендуется использовать специализированные драйверы, например A4988 или DRV8825.
- В Arduino IDE есть встроенная библиотека Stepper для работы с шаговыми двигателями.
- При подключении важно правильно определить выводы обмоток двигателя.
- Шаговые двигатели позволяют точно контролировать угол поворота, что полезно в проектах, требующих высокой точности позиционирования.
Пример кода для управления шаговым двигателем с использованием библиотеки Stepper:
#includeconst int stepsPerRevolution = 200; // Зависит от модели двигателя Stepper myStepper(stepsPerRevolution, 8, 9, 10, 11); void setup() { myStepper.setSpeed(60); // 60 оборотов в минуту } void loop() { myStepper.step(stepsPerRevolution); // Полный оборот по часовой стрелке delay(500); myStepper.step(-stepsPerRevolution); // Полный оборот против часовой стрелки delay(500); }
Типичные проблемы при работе с драйверами двигателей и их решения
При использовании драйверов двигателей с Arduino могут возникать различные проблемы. Рассмотрим наиболее распространенные из них и способы их решения:
Перегрев драйвера
Проблема: Драйвер быстро нагревается и может выйти из строя.
Решение:
- Использовать радиатор или активное охлаждение
- Проверить соответствие тока двигателя максимально допустимому току драйвера
- Использовать ШИМ для снижения среднего тока через двигатель
Нестабильная работа Arduino
Проблема: Arduino может перезагружаться или работать нестабильно при включении двигателей.
Решение:
- Использовать отдельный источник питания для двигателей
- Добавить развязывающие конденсаторы между питанием и землей
- Проверить качество соединений и проводов
Неожиданное поведение двигателей
Проблема: Двигатели вращаются не в ту сторону или с неправильной скоростью.
Решение:
- Проверить правильность подключения проводов двигателя
- Убедиться в корректности кода управления
- Проверить настройки ШИМ и логических уровней
Своевременное выявление и решение этих проблем поможет создать надежную и эффективную систему управления двигателями на базе Arduino.
Расширенные возможности управления двигателями с Arduino
Помимо базового управления скоростью и направлением вращения, Arduino в сочетании с подходящим драйвером позволяет реализовать более сложные алгоритмы управления двигателями:
ПИД-регулирование
ПИД-регулятор позволяет точно контролировать скорость или положение двигателя. Для его реализации на Arduino можно использовать библиотеку PID_v1.
Плавный старт и остановка
Для снижения нагрузки на механику и увеличения срока службы двигателя можно реализовать алгоритмы плавного ускорения и торможения.
Синхронизация нескольких двигателей
В проектах с несколькими двигателями часто требуется их синхронная работа. Arduino позволяет реализовать алгоритмы синхронизации, используя прерывания и таймеры.
Обратная связь по положению
Подключив энкодер к двигателю и Arduino, можно реализовать точное позиционирование и контроль скорости вращения.
Эти расширенные возможности позволяют создавать сложные и эффективные системы управления двигателями на базе Arduino, применимые в робототехнике, автоматизации и других областях.
Драйверы двигателя L298N, L293D и Arduino Motor Shield
Драйвер двигателя выполняет крайне важную роль в проектах ардуино, использующих двигатели постоянного тока или шаговые двигатели. C помощью микросхемы драйвера или готового шилда motor shield можно создавать мобильных роботов, автономные автомобили на ардуино и другие устройства с механическими модулями. В этой статье мы рассмотрим подключение к ардуино популярных драйверов двигателей на базе микросхем L298N и L293D.
Драйвер двигателя в проектах ардуино
Для чего нужен драйвер двигателя?
Как известно, плата ардуино имеет существенные ограничения по силе тока присоединенной к ней нагрузки. Для платы это 800 mA, а для каждого отдельного вывода – и того меньше, 40mA. Мы не можем подключить напрямую к Arduino Uno, Mega или Nano даже самый маленький двигатель постоянного тока. Любой из этих двигателей в момент запуска или остановки создаст пиковые броски тока, превышающие этот предел.
Как же тогда подключить двигатель к ардуино? Есть несколько вариантов действий:
Использовать реле. Мы включаем двигатель в отдельную электрическую сеть, никак не связанную с платой Arduino. Реле по команде ардуино замыкает или размыкает контакты, тем самым включает или выключает ток. Соответственно, двигатель включается или выключается. Главным преимуществом этой схемы является ее простота и возможность использовать Главным недостатком данной схемы является то, что мы не можем управлять скоростью и направлением вращения.
Использовать силовой транзистор. В данном случае мы можем управлять током, проходящим через двигатель, а значит, можем управлять скоростью вращения шпинделя. Но для смены направления вращения этот способ не подойдет.
Использовать специальную схему подключения, называемую H-мостом, с помощью которой мы можем изменять направление движения шпинделя двигателя. Сегодня можно без проблем найти как микросхемы, содержащие два или больше H-моста, так и отдельные модули и платы расширения, построенные на этих микросхемах.
В этой статье мы рассмотрим последний, третий вариант, как наиболее гибкий и удобный для создания первых роботов на ардуино.
Микросхема или плата расширения Motor Shield
Motor Shield – плата расширения для Ардуино, которая обеспечивает работу двигателей постоянного тока и шаговых двигателей. Самыми популярными платами Motor Shield являются схемы на базе чипов L298N и L293D, которые могут управлять несколькими двигателями. На плате установлен комплект сквозных колодок Ардуино Rev3, позволяющие устанавливать другие платы расширения. Также на плате имеется возможность выбора источника напряжения – Motor Shield может питаться как от Ардуино, так и от внешнего источника. На плате имеется светодиод, который показывает, работает ли устройство. Все это делает использование драйвера очень простым и надежным – не нужно самим изобретать велосипеды и решать уже кем-то решенные проблемы. В этой статье мы будем говорить именно о шилдах.
Принцип действия H-моста
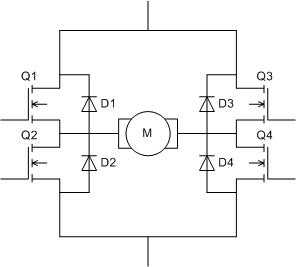 Принцип работы драйвера двигателя основан на принципе работы H-моста. H-мост является электронной схемой, которая состоит из четырех ключей с нагрузкой. Название моста появилось из напоминающей букву H конфигурации схемы.
Принцип работы драйвера двигателя основан на принципе работы H-моста. H-мост является электронной схемой, которая состоит из четырех ключей с нагрузкой. Название моста появилось из напоминающей букву H конфигурации схемы.
Схема моста изображена на рисунке. Q1…Q4 0 полевые, биполярные или IGBT транзисторы. Последние используются в высоковольтных сетях. Биполярные транзисторы практически не используются, они могут присутствовать в маломощных схемах. Для больших токов берут полевые транзисторы с изолированным затвором. Ключи не должны быть замкнуты вместе одновременно, чтобы не произошло короткого замыкания источника. Диоды D1…D4 ограничительные, обычно используются диоды Шоттки.
С помощью изменения состояния ключей на H-мосте можно регулировать направление движения и тормозить моторы. В таблице приведены основные состояния и соответствующие им комбинации на пинах.
| Q1 | Q2 | Q3 | Q4 | Состояние |
| 1 | 0 | 0 | 1 | Поворот мотора вправо |
| 0 | 1 | 1 | 0 | Поворот мотора влево |
| 0 | 0 | 0 | 0 | Свободное вращение |
| 0 | 1 | 0 | 1 | Торможение |
| 1 | 0 | 1 | 0 | Торможение |
| 1 | 1 | 0 | 0 | Короткое замыкание |
| 0 | 0 | 1 | 1 | Короткое замыкание |
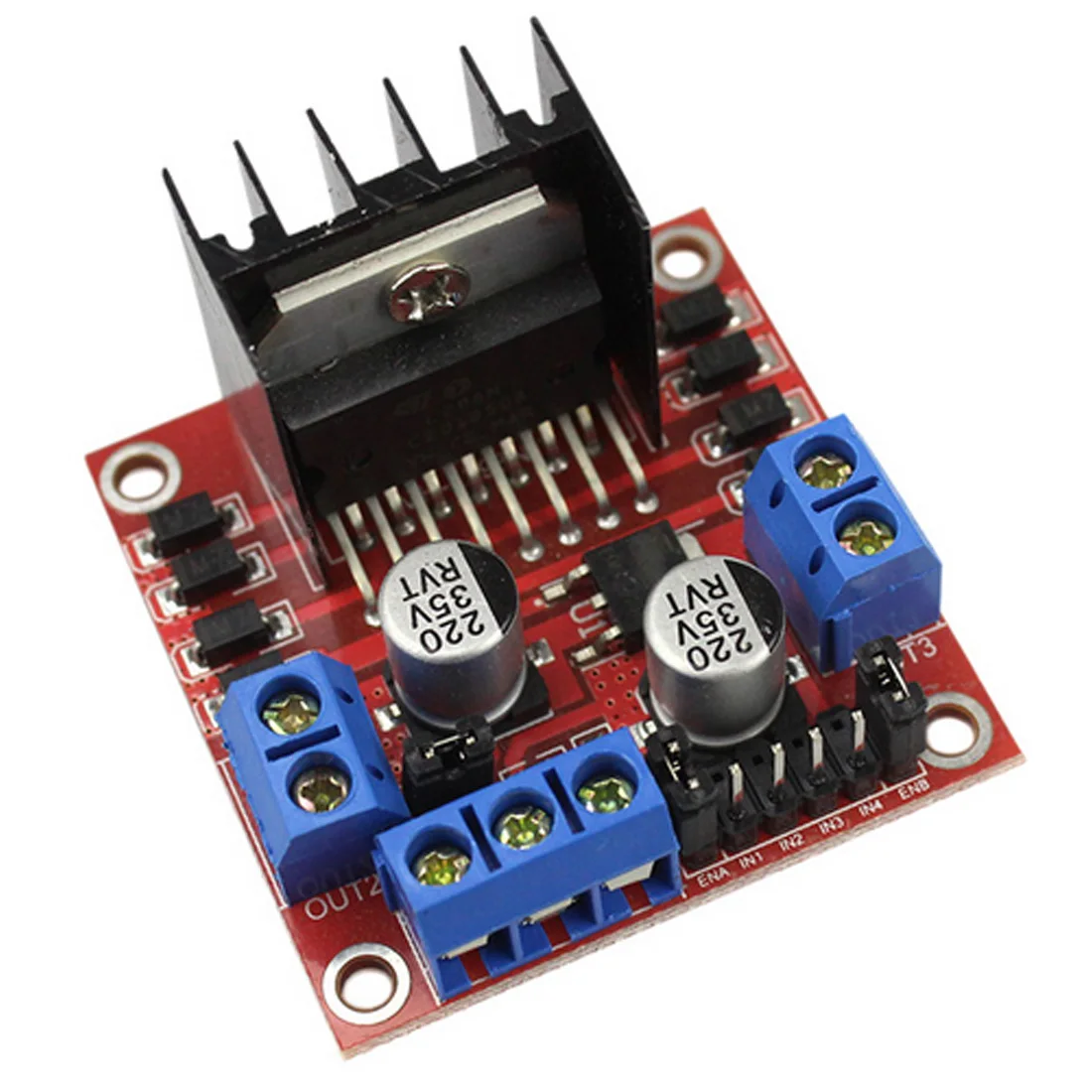
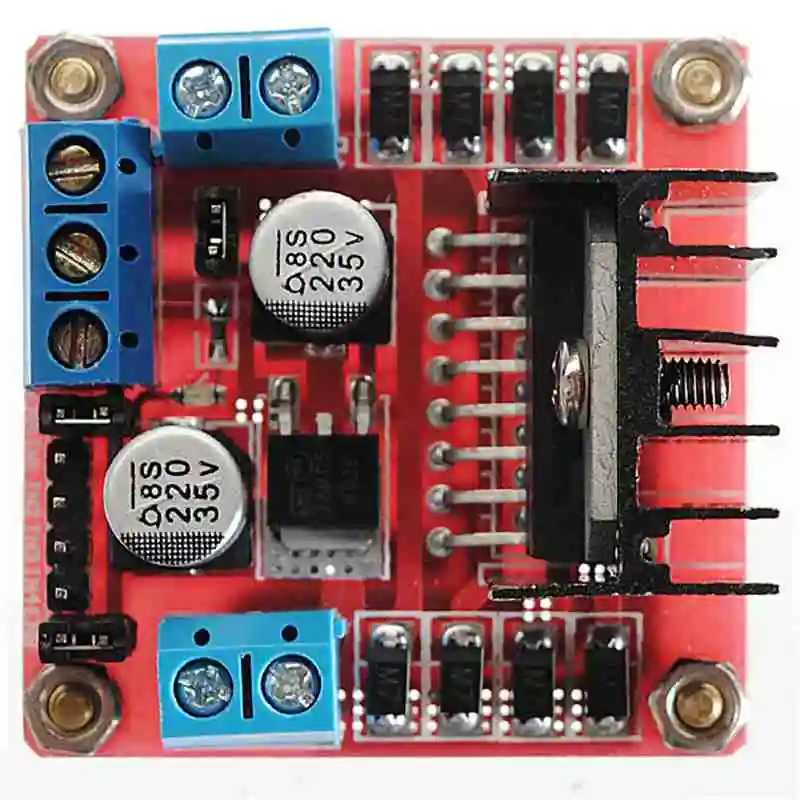
Драйвер двигателя L298N
Модуль используется для управления шаговыми двигателями с напряжением от 5 до 35 В. При помощи одной платы L298N можно управлять сразу двумя двигателями. Наибольшая нагрузка, которую обеспечивает микросхема, достигает 2 А на каждый двигатель. Если подключить двигатели параллельно, это значение можно увеличить до 4 А.
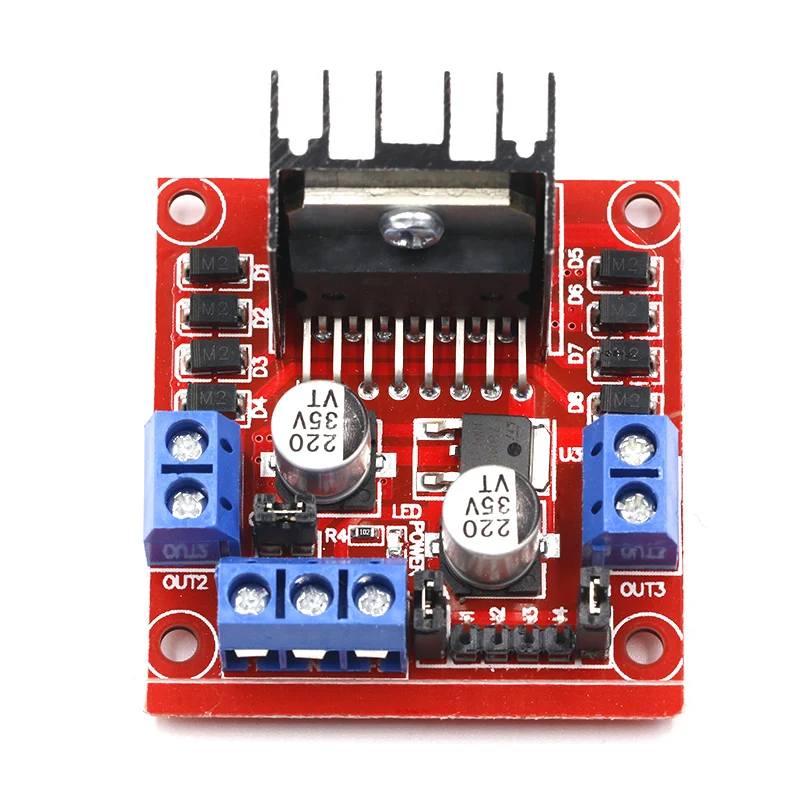
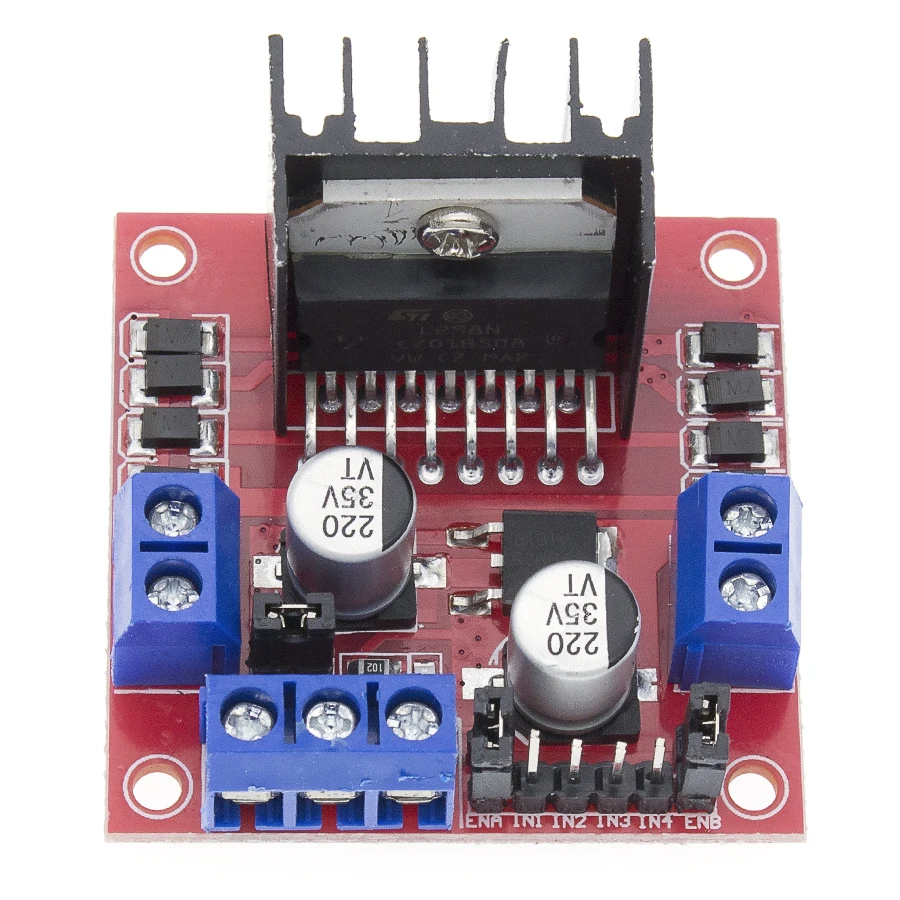
Плата выглядит следующим образом:

Распиновка микросхемы L298N:
- Vcc – используется для подключения внешнего питания;
- 5В;
- Земля GND;
- IN1, IN2, IN3, IN4 – используется для плавного управления скоростью вращения мотора;
- OUT1, OUT2 – используется для выхода с первого двигателя;
- OUT3, OUT4 – используется для выхода со второго двигателя;
- S1 – переключает питание схемы: от внешнего источника или от внутреннего преобразователя;
- ENABLE A, B – требуются для раздельного управления каналами. Используются в двух режимах – активный, при котором каналами управляет микроконтроллер и имеется возможность изменения скорости вращения, и пассивный, в котором невозможно управлять скоростью двигателей (установлено максимальное значение).

При подключении двух двигателей, нужно проверить, чтобы у них была одинаковая полярность. Если полярность разная, то при задании направления движения они будут вращаться в противоположные стороны.
Драйвер двигателя L293D
L293D – является самой простой микросхемой для работы с двигателями. L293D обладает двумя H-моста, которые позволяют управлять двумя двигателями. Рабочее напряжение микросхемы – 36 В, рабочий ток достигает 600 мА. На двигатель L293D может подавать максимальный ток в 1,2 А.
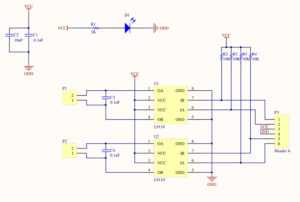
В схеме имеется 16 выходов. Распиновка:
- +V – питание на 5 В;
- +Vmotor – напряжение питания для мотором до 36 В;
- 0V – земля;
- En1, En2 –включают и выключают H-мосты;
- In1, In2 – управляют первым H-мостом;
- Out1, Out2 – подключение первого H-моста;
- In3, In4 – управляют вторым H-мостом;
- Out3, Out4 – подключение второго H-моста.
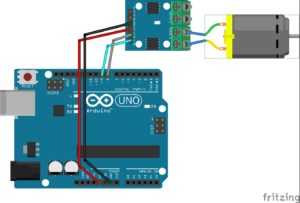
Для подключения к микроконтроллеру Arduino Uno нужно соединить выходы In1 на L293D и 7 пин на Ардуино, In2 – 8, In3 – 2, In4 – 3, En1 – 6, En2 – 5, V – 5V, Vmotor – 5 V, 0V – GND. Пример подключения одного двигателя к Ардуино показан на рисунке.

Драйвер двигателя на микросхеме HG7881
HG7881 – двухканальный драйвер, к которому можно подключить 2 двигателя или четырехпроводной двухфазный шаговый двигатель. Устройство часто используется из-за своей невысокой стоимости. Драйвер используется только для изменения направления вращения, менять скорость он не может.
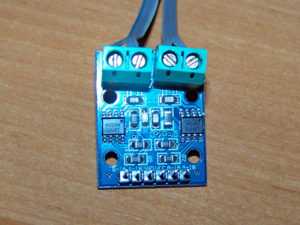
Плата содержит 2 схемы L9110S, работающие как H-мост.
Характеристики драйвера HG7881:
- 4-контактное подключение;
- Питание для двигателей от 2,5 В до 12 В;
- Потребляемый ток менее 800 мА;
- Малые габариты, небольшой вес.
Распиновка:
- GND – земля;
- Vcc – напряжение питания 2,5В – 12В;
- A-IA – вход A(IA) для двигателя A;
- A-IB – вход B (IB) для двигателя A;
- B-IA – вход A(IA) для двигателя B;
- B-IB – вход B (IB) для двигателя B.
В зависимости от поданного сигнала на выходах IA и IB будет разное состояние для двигателей. Возможные варианты для одного из моторов приведены в таблице.
| IA | IB | Состояние мотора |
| 0 | 0 | Остановка |
| 1 | 0 | Двигается вперед |
| 0 | 1 | Двигается назад |
| 1 | 1 | Отключение |
Подключение одного двигателя к Ардуино изображено на рисунке.

Сравнение модулей
Модуль L293D подает максимальный ток в 1,2А, в то время как на L298N можно добиться максимального тока в 4 А. Также L293D обладает меньшим КПД и быстро греется во время работы. При этом L293D является самой распространенной платой и стоит недорого. Плата HG7881 отличается от L293D и L298N тем, что с ее помощью можно управлять только направлением вращения, скорость менять она не может. HG7881 – самый дешевый и самый малогабаритный модуль.
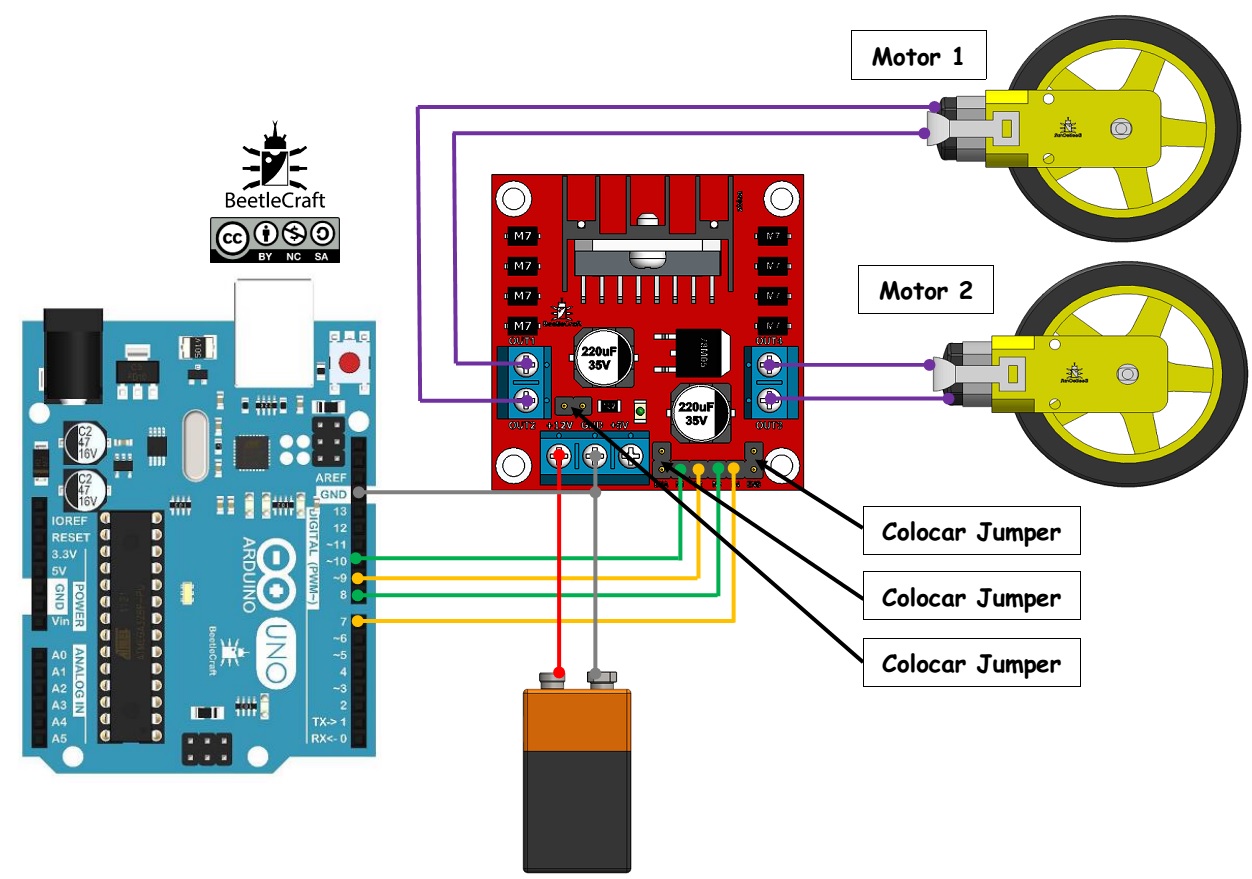
Подключение L298N к Arduino
Как уже упоминалось, в первую очередь нужно проверить полярность подключенных двигателей. Двигатели, вращающиеся в различных направлениях, неудобно программировать.
Нужно присоединить источник питания. + подключается к пину 4 на плате L298N, минус (GND) – к 5 пину. Затем нужно соединить выходы с L298N и пины на Ардуино, причем некоторые из них должны поддерживать ШИМ-модуляцию. На плате Ардуино они обозначены ~. Выходы с L298N IN1, IN2, IN3 и IN4 подключить к D7, D6, D5 и D4 на Ардуино соответственно. Подключение всех остальных контактов представлено на схеме.

Направление вращения задается с помощью сигналов HIGH и LOW на каждый канал. Двигатели начнут вращаться, только когда на 7 пине для первого мотора и на 12 пине для второго на L298N будет сигнал HIGH. Подача LOW останавливает вращение. Чтобы управлять скоростью, используются ШИМ-сигналы.
Для управления шаговым двигателем в Arduino IDE существует стандартная библиотека Stepper library. Чтобы проверить работоспособность собранной схемы, можно загрузить тестовый пример stepper_oneRevolution. При правильной сборке вал двигателя начнет вращаться.
При работе с моторами Ардуино может периодически перезагружаться. Это возникает из-за того, что двигателям требуются большие токи при старте и в момент торможения. Для решения этой проблемы в плату встроены конденсаторы, диоды и другие схемы. Также для этих целей на шидле имеется раздельное питание.
arduinomaster.ru
Двухканальный драйвер двигателя HG7881 (L9110S)
/*
HG7881_Motor_Driver_Example — Arduino sketch
This example shows how to drive a motor with using HG7881 (L9110) Dual
Channel Motor Driver Module. For simplicity, this example shows how to
drive a single motor. Both channels work the same way.
This example is meant to illustrate how to operate the motor driver
and is not intended to be elegant, efficient or useful.
Connections:
Arduino digital output D10 to motor driver input B-IA.
Arduino digital output D11 to motor driver input B-IB.
Motor driver VCC to operating voltage 5V.
Motor driver GND to common ground.
Motor driver MOTOR B screw terminals to a small motor.
*/
// wired connections
#define HG7881_B_IA 10 // D10 —> Motor B Input A —> MOTOR B +
#define HG7881_B_IB 11 // D11 —> Motor B Input B —> MOTOR B —
// functional connections
#define MOTOR_B_PWM HG7881_B_IA // Motor B PWM Speed
#define MOTOR_B_DIR HG7881_B_IB // Motor B Direction
// the actual values for «fast» and «slow» depend on the motor
#define PWM_SLOW 100 // arbitrary slow speed PWM duty cycle
#define PWM_FAST 200 // arbitrary fast speed PWM duty cycle
#define DIR_DELAY 1000 // brief delay for abrupt motor changes
void setup()
{
Serial.begin( 9600 );
pinMode( MOTOR_B_DIR, OUTPUT );
pinMode( MOTOR_B_PWM, OUTPUT );
digitalWrite( MOTOR_B_DIR, LOW );
digitalWrite( MOTOR_B_PWM, LOW );
}
void loop()
{
boolean isValidInput;
// draw a menu on the serial port
Serial.println( «——————————» );
Serial.println( «MENU:» );
Serial.println( «1) Fast forward» );
Serial.println( «2) Forward» );
Serial.println( «3) Soft stop (coast)» );
Serial.println( «4) Reverse» );
Serial.println( «5) Fast reverse» );
Serial.println( «6) Hard stop (brake)» );
Serial.println( «——————————» );
do
{
byte c;
// get the next character from the serial port
Serial.print( «?» );
while( !Serial.available() )
; // LOOP…
c = Serial.read();
// execute the menu option based on the character recieved
switch( c )
{
case ‘1’: // 1) Fast forward
Serial.println( «Fast forward…» );
// always stop motors briefly before abrupt changes
digitalWrite( MOTOR_B_DIR, LOW );
digitalWrite( MOTOR_B_PWM, LOW );
delay( DIR_DELAY );
// set the motor speed and direction
digitalWrite( MOTOR_B_DIR, HIGH ); // direction = forward
analogWrite( MOTOR_B_PWM, 255-PWM_FAST ); // PWM speed = fast
isValidInput = true;
break;
case ‘2’: // 2) Forward
Serial.println( «Forward…» );
// always stop motors briefly before abrupt changes
digitalWrite( MOTOR_B_DIR, LOW );
digitalWrite( MOTOR_B_PWM, LOW );
delay( DIR_DELAY );
// set the motor speed and direction
digitalWrite( MOTOR_B_DIR, HIGH ); // direction = forward
analogWrite( MOTOR_B_PWM, 255-PWM_SLOW ); // PWM speed = slow
isValidInput = true;
break;
case ‘3’: // 3) Soft stop (preferred)
Serial.println( «Soft stop (coast)…» );
digitalWrite( MOTOR_B_DIR, LOW );
digitalWrite( MOTOR_B_PWM, LOW );
isValidInput = true;
break;
case ‘4’: // 4) Reverse
Serial.println( «Fast forward…» );
// always stop motors briefly before abrupt changes
digitalWrite( MOTOR_B_DIR, LOW );
digitalWrite( MOTOR_B_PWM, LOW );
delay( DIR_DELAY );
// set the motor speed and direction
digitalWrite( MOTOR_B_DIR, LOW ); // direction = reverse
analogWrite( MOTOR_B_PWM, PWM_SLOW ); // PWM speed = slow
isValidInput = true;
break;
case ‘5’: // 5) Fast reverse
Serial.println( «Fast forward…» );
// always stop motors briefly before abrupt changes
digitalWrite( MOTOR_B_DIR, LOW );
digitalWrite( MOTOR_B_PWM, LOW );
delay( DIR_DELAY );
// set the motor speed and direction
digitalWrite( MOTOR_B_DIR, LOW ); // direction = reverse
analogWrite( MOTOR_B_PWM, PWM_FAST ); // PWM speed = fast
isValidInput = true;
break;
case ‘6’: // 6) Hard stop (use with caution)
Serial.println( «Hard stop (brake)…» );
digitalWrite( MOTOR_B_DIR, HIGH );
digitalWrite( MOTOR_B_PWM, HIGH );
isValidInput = true;
break;
default:
// wrong character! display the menu again!
isValidInput = false;
break;
}
} while( isValidInput == true );
// repeat the main loop and redraw the menu…
}
arduino-project.net
Драйвер моторов на L293D подключение к Arduino
Подключение драйвера RKP-MDS-L293D Motor Shield L293D к Arduino UNO
Модуль управления моторами RKP-MDS-L293D на микросхемах L293D предназначен для управления различными типами двигателей — постоянного тока (до 4-х шт.), сервомоторов (до 2-х шт.) и шаговых двигателей (до 2-х шт.) совместно с Arduino.
Электрическая схема драйвера.
Нажать и посмотреть схему =>>
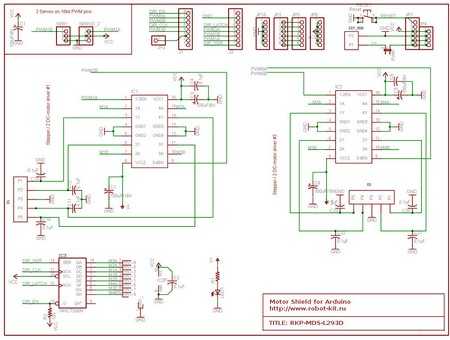
На электрической схеме драйвера RKP-MDS-L293D Motor Driver L293D видно, что режимы управление двигателями постоянного тока и шаговыми двигателями осуществляется через микросхему 74HCT595N (см. рис. 1).
Функциональная диаграмма микросхемы 74HCT595N

Рис. 1
Это регистр последовательного сдвига с защелкой.
Скачать библиотеку AFMotor Motor shield =>>
В библиотеке AFMotor Motor shield определены pin для Motor Shield L293D по которым осуществляется установка режимов управление моторами:
// Arduino pin names for interface to 74HCT595 latch #define MOTORLATCH 12 = DIR_LATCH // pin 12 Arduino #define MOTORCLK 4 = DIR_CLK // pin 4 Arduino #define MOTORENABLE 7 = DIR_EN // pin 7 Arduino #define MOTORDATA 8 = DIR_SER // pin 8 ArduinoЗа изменение скорости вращения двигателей отвечаю цепи PWM0A, PWM0B, PWM1A, PWM1B, PWM2A и PWM2B микросхем драйверов двигателей L293D (см. рис. 2).
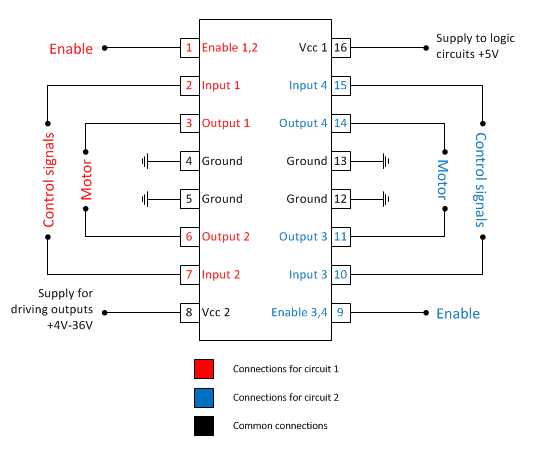
Рис. 2
Соответствие pin — Motor Shield L293D и pin — Arduino Uno приведены в таблице 1.
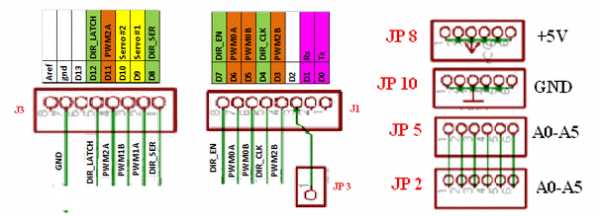
Таблица. 1
А назначение управляющих битов регистра 74HCT595N для моторов 1- 4 в таблице 2.
Таблица. 2
Из таблицы 2 видно, чтобы заставить Мотор 1 работать на max скорости нужно в регистр передать byte у которого bit 2 = 1 и bit 3 = 0, а чтобы поменять вращение на противоположное – bit 2 = 0 и bit 3 = 1.
!!Еще одна важная особенность!!!
Питание сервомоторов осуществляется от платы Arduino 5V. Если сервомоторы потребляют больший ток чем может выдать источник питания Arduino, то всё устройство начинает «глючить».
Это может случиться даже с небольшими серводвигателями, если их где-то заклинит. Тогда ток потребления может возрасти до 0,8-1А. Поэтому питать серводвигатели лучше от дополнительного источника питания.
Подключение питания
Питание моторов подключенных к драйверу RKP-MDS-L293D Motor Driver L293D может осуществляется не сколькими способами:
1. От одного источника питания.
В этом случае питание подается на разъем Arduino 6-12В и с выхода линейного стабилизатора происходит питание цифровых схем Arduino и сервомоторов. Далее питание 6-12В через контакт Vin и установленный джампер, подается на Motor Shield L293D для питания остальных типов моторов.
2. От двух источников питания.
Для этого необходимо снять джампер источника питания. В этом случае источник питания подключенный к разъем у Arduino 6-12В обеспечивает ее работу, цифровых схем Motor Shield L293D и питание серво двигателей. А второй источник питания 4.5-25В — питание двигателей постоянного тока и шаговых двигателей (см. рис. 3).
Рис. 3
Схема подключения двигателей к драйверу RKP-MDS-L293D Motor Driver L293D
Подключение моторов постоянного тока (4 DC Motors)
Драйвер Motor Shield L293D позволяет одновременно подключить до 4-х двигателей постоянного тока (см. рис. 4).
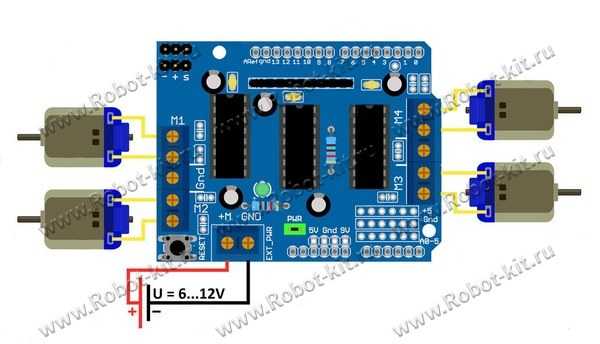
Рис. 4
Подключение шаговых двигателей к драйверу RKP-MDS-L293D Motor Driver L293D
Драйвер Motor Shield L293D позволяет одновременно подключить до 2-х шаговых двигателей (см. рис. 5).
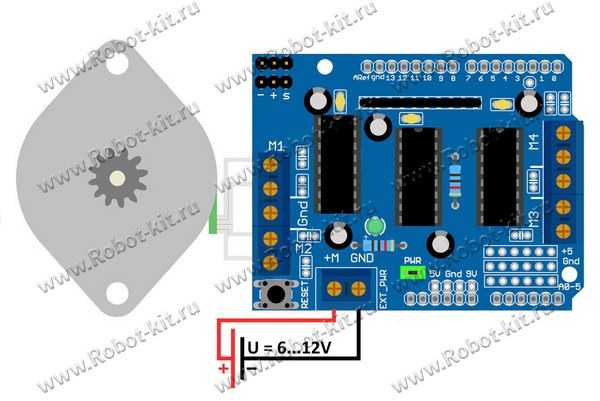
Рис. 5
Просмотров: 19104
Дата: Среда, 15 Июня 2016
robot-kit.ru
Драйвер коллекторных двигателей L9110S (HG7881)
Модуль собран на двух микросхемах HG7881 или аналоге L9110S, к модулю можно подключить два маломощных коллекторных или один шаговый двигатель.
Характеристики драйвера L9110S (HG7881):
- Диапазон напряжения питания: 2.5V … 12V.
-
Максимальный ток: 800mA, на каждый канал.
-
Управление логическим уровнем.
-
Встроенные защитные диоды.
-
Рабочая температура: 0℃ … 80℃.
Особенности модуля:
Модуль собран на двух полумостовых драйверах (H-bridge) HG7881, к сожалению подробного даташита на микросхему нет. Хотя и пишут что он предназначен для управления моторами, это не совсем так, у драйвера отсутствует возможность изменять скорость вращения мотора, драйвер способен изменять только направление вращения. По этой причине, данный модуль больше подходит для управления небольшими шаговыми двигателями, нежели коллекторными.
На схеме из даташита видно, что в наличии только входы для управления полумостами и питание.
Принципиальная схема модуля:
Подключение модуля к Arduino:
В случаи подключения коллекторного мотора.
Модуль подключается на два свободных выхода arduino, питание для моторов, если они маломощные и работают от напряжение 5 вольт, можно взять от arduino. Чтобы заставить мотор крутится, нужно на один выход подать логическую единицу и на второй логический ноль. Для изменения направления вращения, нужно инвертировать состояние обеих выходов arduino. подробнее в видео ниже.
код из видео
#define A1_A 8 // выходы на драйвер
#define A1_B 9
void setup(){
pinMode (A1_A, OUTPUT);
pinMode (A1_B, OUTPUT);
}
void loop(){
// включаем мотор на 1 секунды вперед
digitalWrite (A1_A, HIGH);
digitalWrite (A1_B, LOW);
delay(1000);
// выключаем мотор
digitalWrite (A1_A, LOW);
digitalWrite (A1_B, LOW);
delay(1000);
// включаем мотор на 1 секунды назад
digitalWrite (A1_A, LOW);
digitalWrite (A1_B, HIGH);
delay(1000);
// выключаем мотор
digitalWrite (A1_A, LOW);
digitalWrite (A1_B, LOW);
delay(1000);
// плавно увеличиваем скорость
digitalWrite (A1_A, LOW);
for (int i = 0; i < 255; i++){
analogWrite (A1_B, i);
delay(25);
}
delay(2000);
// плавно уменьшаем скорость
digitalWrite (A1_A, LOW);
for (int i = 255; i > 0; i--){
analogWrite (A1_B, i);
delay(25);
}
delay(1000);
}
В случаи подключения биполярного шагового двигателя.
Подключаем обмотки за место коллекторных двигателей. Для работы можно использовать встроенную в среду библиотеку Stepper.h.
Запись опубликована автором admin в рубрике Обзоры с метками H-bridge, L9110S, коллекторный двигатель, шаговый двигатель.
arduinolab.pw