Что такое драйвер TB6600 Arduino. Как подключить и настроить TB6600 для управления шаговым двигателем. Какие функции и возможности имеет TB6600. Как программировать Arduino для работы с TB6600. Примеры проектов с использованием TB6600.
Что такое драйвер шагового двигателя TB6600 Arduino
TB6600 Arduino — это мощный драйвер для управления шаговыми двигателями с помощью платформы Arduino. Основные характеристики TB6600:
- Максимальный выходной ток до 4А
- Напряжение питания 9-42В
- Поддержка микрошага (до 1/32 шага)
- Защита от перегрева и короткого замыкания
- Совместимость с Arduino и другими микроконтроллерами
TB6600 позволяет легко подключать и управлять мощными шаговыми двигателями в проектах на базе Arduino. Это надежное и функциональное решение для создания станков с ЧПУ, 3D-принтеров и других устройств, требующих точного позиционирования.
Подключение TB6600 к Arduino и шаговому двигателю
Для подключения TB6600 к Arduino и шаговому двигателю потребуется:
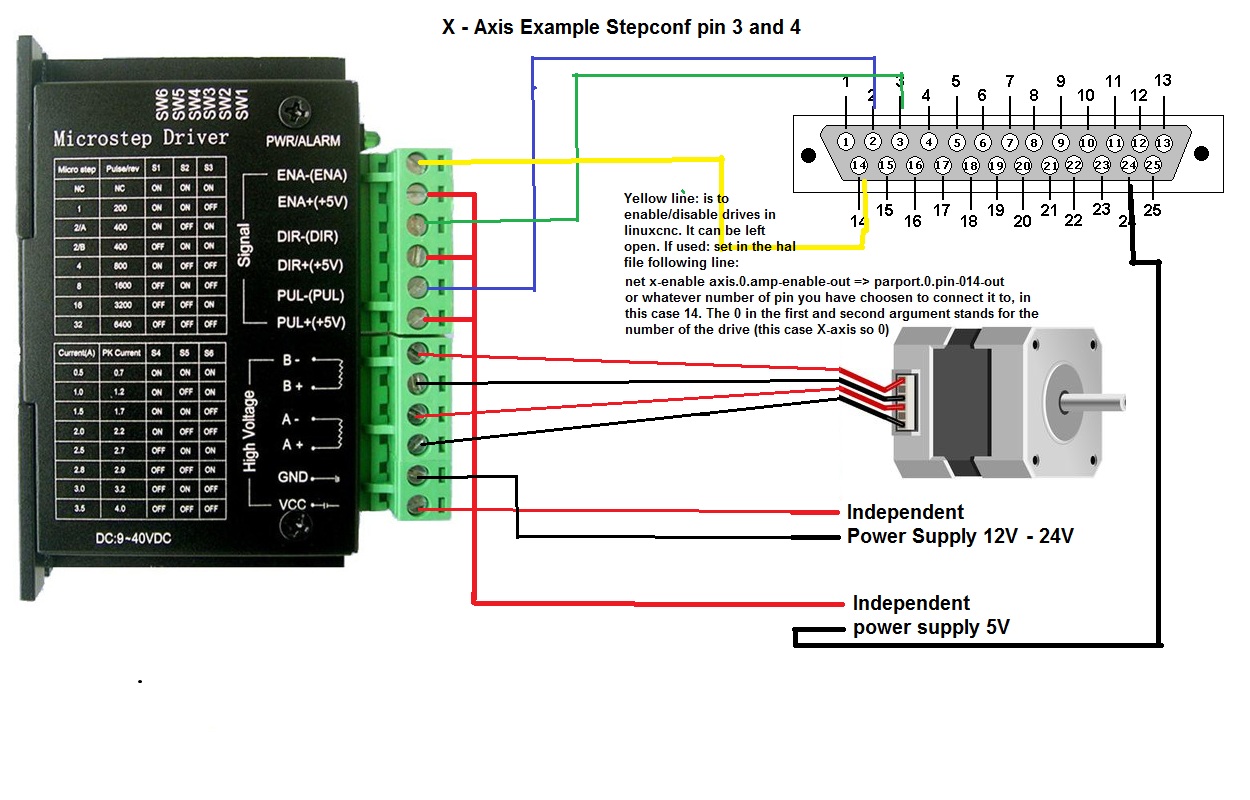
- Подключить выводы DIR, STEP, ENABLE TB6600 к цифровым пинам Arduino
- Подать питание 9-42В на клеммы питания TB6600
- Подключить обмотки шагового двигателя к выходным клеммам TB6600
- Настроить микрошаг и ток с помощью DIP-переключателей на TB6600
Типовая схема подключения выглядит следующим образом:
- DIR — пин 2 Arduino
- STEP — пин 3 Arduino
- ENABLE — пин 8 Arduino
- GND — GND Arduino
- VCC — 5V Arduino
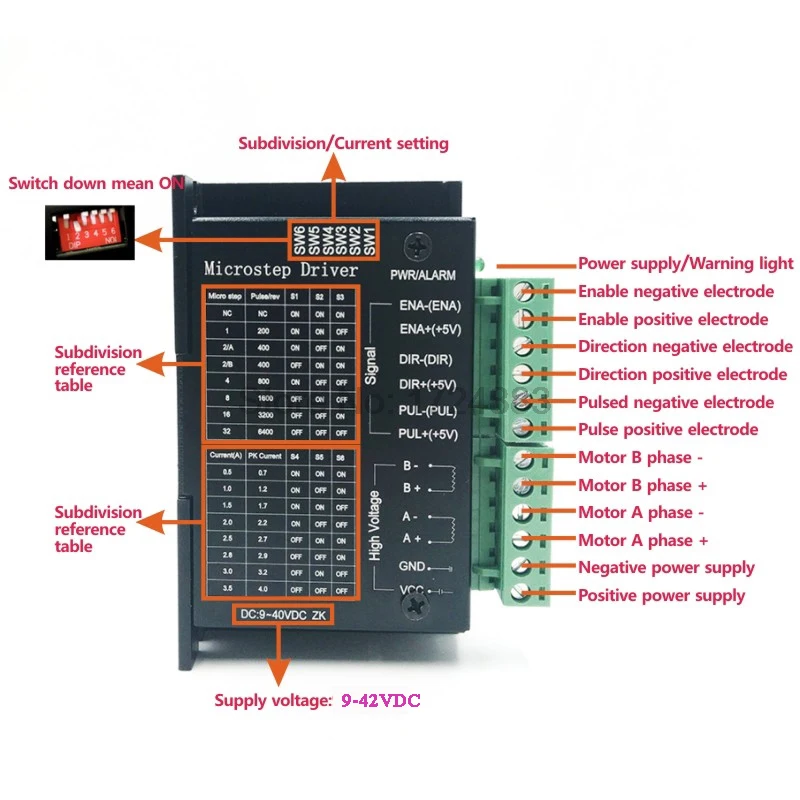
Настройка микрошага и тока TB6600
TB6600 позволяет настроить микрошаг и максимальный ток с помощью DIP-переключателей на плате драйвера:
Настройка микрошага:
- SW1-3: 1/32 шага
- SW1-2: 1/16 шага
- SW1-1: 1/8 шага
- Все OFF: полный шаг
Настройка тока:
- SW4-6: 4.0A
- SW4-5: 3.5A
- SW4-4: 3.0A
- SW4-3: 2.5A
- SW4-2: 2.0A
- SW4-1: 1.5A
Выбор оптимальных настроек зависит от используемого шагового двигателя. Рекомендуется начать с низких значений и постепенно увеличивать их для достижения нужной производительности.
Программирование Arduino для управления TB6600
Для управления TB6600 с Arduino можно использовать стандартные функции digitalWrite() и delayMicroseconds(). Пример простого кода для вращения двигателя:
Использование библиотек для упрощения работы с TB6600
Для более удобного управления TB6600 можно использовать специализированные библиотеки Arduino. Одна из популярных библиотек — AccelStepper. Она позволяет легко реализовать плавный разгон и торможение двигателя.
Пример использования AccelStepper с TB6600:
«`cpp #includeОсобенности работы с большими токами и напряжениями
При использовании TB6600 для управления мощными двигателями важно учитывать следующие моменты:
- Обеспечьте хорошее охлаждение драйвера, особенно при работе на больших токах
- Используйте качественный источник питания, способный выдавать необходимый ток
- Правильно подбирайте сечение проводов для подключения двигателя
- Не превышайте максимально допустимые значения тока и напряжения
- При необходимости используйте дополнительные конденсаторы для сглаживания пульсаций
Соблюдение этих правил поможет обеспечить надежную и долговременную работу системы на базе TB6600.
Применение TB6600 в реальных проектах
TB6600 широко применяется в различных проектах, требующих точного управления мощными шаговыми двигателями. Вот несколько примеров использования:
3D-принтер
В 3D-принтерах TB6600 часто используется для управления двигателями осей X, Y и Z. Это позволяет обеспечить высокую точность позиционирования и плавность движения при печати.
Станок с ЧПУ
TB6600 отлично подходит для управления двигателями в самодельных станках с ЧПУ. Он обеспечивает необходимую мощность и точность для фрезерования, гравировки и других операций.
Роботизированная рука
Для создания роботизированных манипуляторов TB6600 используется для управления двигателями в суставах. Это позволяет реализовать плавные и точные движения робота.
Troubleshooting и решение проблем с TB6600
При работе с TB6600 могут возникнуть некоторые проблемы. Вот наиболее распространенные из них и способы их решения:
Двигатель не вращается
Возможные причины:
- Неправильное подключение — проверьте все соединения
- Не подается сигнал ENABLE — убедитесь, что на пин ENABLE подан LOW
- Слишком низкий ток — увеличьте настройку тока на DIP-переключателях
Двигатель греется или вибрирует
Возможные причины:
- Слишком высокий ток — уменьшите настройку тока
- Неправильная настройка микрошага — попробуйте другие режимы микрошага
- Механические проблемы — проверьте систему на наличие люфтов и перекосов
Пропуск шагов
Возможные причины:
- Недостаточный ток — увеличьте настройку тока
- Слишком высокая скорость — уменьшите скорость вращения
- Механическая перегрузка — проверьте систему на наличие препятствий
При возникновении проблем рекомендуется начать с проверки всех соединений и настроек, затем постепенно менять параметры для достижения стабильной работы.
Драйвер мотора на 43А BTS7960 для Arduino
Модуль управления мотором RKP-BTS7960 на микросхеме BTS7960.
С его помощью можно управлять одним коллекторным двигателем (DC-мотором). Драйвер рассчитан на напряжение питания двигателя от 5.5 до 27.5 Вольт постоянного тока до 43 А.
Но так как клеммник установленный на плате не рассчитан на такие токи, то для долговременной работы рекомендуется использовать двигатели с током потребления до 10 А. С помощью данного драйвера можно управлять скоростью двигателя, направлением его движения, выполнять торможение и контролировать нагрузку которую испытывает двигатель.
- Драйвер RKP-BTS7960 – мощный интегральный полумостовой драйвер, разработанный компанией Infineon для интеллектуального управления электродвигателями.
- Выполнен на быстродействующих чипах BTS7960 с низким внутренним сопротивлением, поэтому является идеальным решением для проектов с высоким энергопотреблением.
- Модуль поддерживает управление двигателем с помощью ШИМ при максимальной частоте 25 КГц, имеет защиту от короткого замыкания, перегрева и превышения выходного напряжения.

- Возможность каскадного соединения с аналогичными модулями.
- Модуль драйвера совместим с любыми микроконтроллерами, в том числе и Arduino.

Характеристики RKP-BTS7960:
Микросхема драйвера: BTS7960
Напряжение питания двигателя: от 5.5 до 27.5 В постоянного тока (вне указанного диапазона драйвер перейдёт в режим защиты)
Напряжение питания логики: 5 В постоянного тока
Максимальная частота ШИМ на управляющих выводах: 25 кГц
Максимально допустимы ток мотора: 43 А (кратковременно)
Напряжение логических уровней на управляющих выводах: 3.3 или 5 В
Внутреннее сопротивление 16 мОм
Размер: 40 x 50 х 12 мм
Вес: 50 гр.
Описание четырехконтактного разъема с винтовыми зажимами:
• М+ – подключение электродвигателя
• М- – подключение электродвигателя
• B+ – подключение плюсового вывода внешнего мощного источника питания для электродвигателя от 5. 5 до 27.5 Вольт
5 до 27.5 Вольт
• B- – подключение минусового вывода внешнего мощного источника питания для электродвигателя от 5.5 до 27.5 Вольт
Описание восьмиконтактного разъема:
VCC – напряжение питания +5 В от платы микроконтроллера
GND – общий провод питания GND от платы микроконтроллера
R_EN – разрешение включения вращения электродвигателя в одну сторону (HIGH)
L_EN – разрешение включения вращения электродвигателя в противоположную сторону (HIGH)
LPWM – уровень сигнала PWM для регулирования скорости включения вращения электродвигателя в противоположную сторону
R_IS – для отслеживания уровня тока при вращении электродвигателя в одну сторону
L_IS – для отслеживания уровня тока при вращении электродвигателя в противоположную сторону
Подключение и управление драйвером BTS7960 смотрите на вкладке «Подключение драйвера».
Arduino драйвер двигателя l298n в категории «Телекоммуникации и связь»
Драйвер двигателя 2-кан H-мост MX1508, L298N Mini для Arduino DS
Доставка по Украине
191. 22 грн
22 грн
95.61 грн
Купить
Драйвер двигателя 2-кан H-мост MX1508, L298N Mini для Arduino PD
Доставка по Украине
172.57 грн
86.28 грн
Купить
Paid
Драйвер L298N модуль шагового двигателя Arduino
На складе в г. Вознесенск
Доставка по Украине
69 грн
Купить
ArduinoKit обучающие наборы
Драйвер двигателя 2-кан H-мост MX1508, L298N Mini для Arduino
На складе в г. Ровно
Доставка по Украине
35 грн
Купить
PROMRV
Драйвер двигателя 2-кан H-мост MX1508, L298N Mini для Arduino, 102839
На складе в г. Ровно
Доставка по Украине
45 грн
Купить
Интернет магазин » Горячий Стиль «
Драйвер двигателя 2-кан H-мост MX1508, L298N Mini для Arduino
На складе в г. Ровно
Доставка по Украине
по 35 грн
от 9 продавцов
35 грн
Купить
Магазин «Панас»
Драйвер двигателя MX1508 Arduino (аналог L298N) [#2-1]
На складе в г. Запорожье
Запорожье
Доставка по Украине
24 грн
Купить
Ardu.prom.ua (наложка НП от 150 грн!)
Драйвер шагового двигателя и двигателя постоянного тока L298N для Arduino
Доставка по Украине
66.70 грн
Купить
StandartPower
Драйвер шагового двигателей L298N 5V 2A Arduino
На складе в г. Умань
Доставка по Украине
104 грн
Купить
Интернет-магазин «FreeBuy.in.ua»
Драйвер двигателя 2-кан H-мост MX1508, L298N Mini для Arduino
На складе в г. Умань
Доставка по Украине
28 грн
Купить
Интернет-магазин «FreeBuy.in.ua»
Драйвер двигателя 2-кан H-мост MX1508, L298N Mini для Arduino
На складе
Доставка по Украине
по 35 грн
от 4 продавцов
35 грн
Купить
Интернет-магазин Zerus
Драйвер двигателя 2-кан H-мост MX1508, L298N Mini для Arduino
На складе в г. Ровно
Ровно
Доставка по Украине
35 грн
Купить
KRONS интернет- магазин
Драйвер шагового двигателя L298N, Arduino
На складе в г. Тернополь
Доставка по Украине
84 грн
Купить
Коллайдер
Модуль L298N драйвер шагового двигателя для ARDUINO
Доставка из г. Днепр
114.50 грн
Купить
Інтернет-магазин «Електроніка»
Модуль L298N драйвер шагового двигателя Arduino
Доставка по Украине
60 грн
Купить
ONLINE-BOX
Смотрите также
Драйвер двигателя 2-кан H-мост MX1508, L298N Mini для Arduino
Доставка по Украине
56 грн
39 грн
Купить
AZON — супермаркет низких цен
Драйвер шагового двигателя L298N Arduino
Доставка из г. Полтава
85 грн
Купить
МегаШара — Интернет-магазин
Драйвер шагового двигателя L298N Arduino
На складе в г. Полтава
Доставка по Украине
85 грн
Купить
IT Electronics
Драйвер шагового двигателя L298N Arduino
Доставка из г. Полтава
Полтава
по 85 грн
от 2 продавцов
85 грн
Купить
USCompany
Драйвер двигателя 2-кан H-мост MX1508, L298N Mini для Arduino Без бренда
Доставка по Украине
53 грн
Купить
«Ценовал»
Драйвер двигателя для Arduino 2-кан H-мост MX1508, L298N Mini
На складе в г. Ровно
Доставка по Украине
35 грн
Купить
Double-Shop
Драйвер управления двигателями на L298N для Arduino.
Доставка из г. Киев
74 грн
Купить
sk-электрон. Интернет магазин электронных изделий и компонентов.
Модуль драйвера шагового двигателя для ARDUINO L298N
Заканчивается
Доставка по Украине
188 грн
Купить
магазин ДИМИР
Драйвер двох двигунів L298N
Доставка по Украине
70 грн
Купить
Інтернет-магазин «Перша гуртівня електрики»
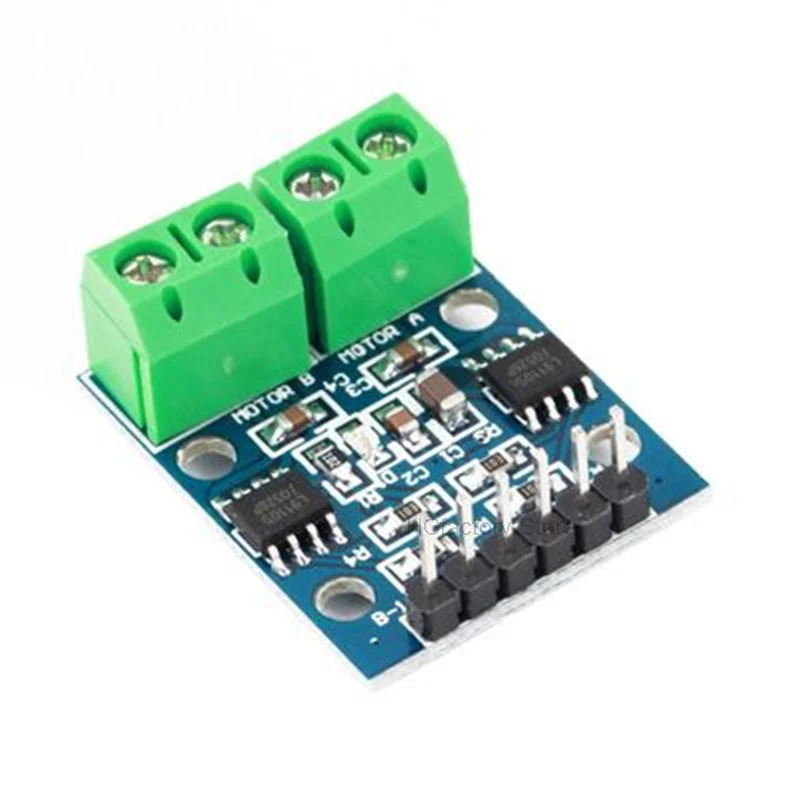
Драйвер двигунів L9110S
На складе
Доставка по Украине
32 грн
Купить
Інтернет-магазин «Мікроампер»
4-канальный драйвер шагового двигателя L9110S для Arduino
На складе в г.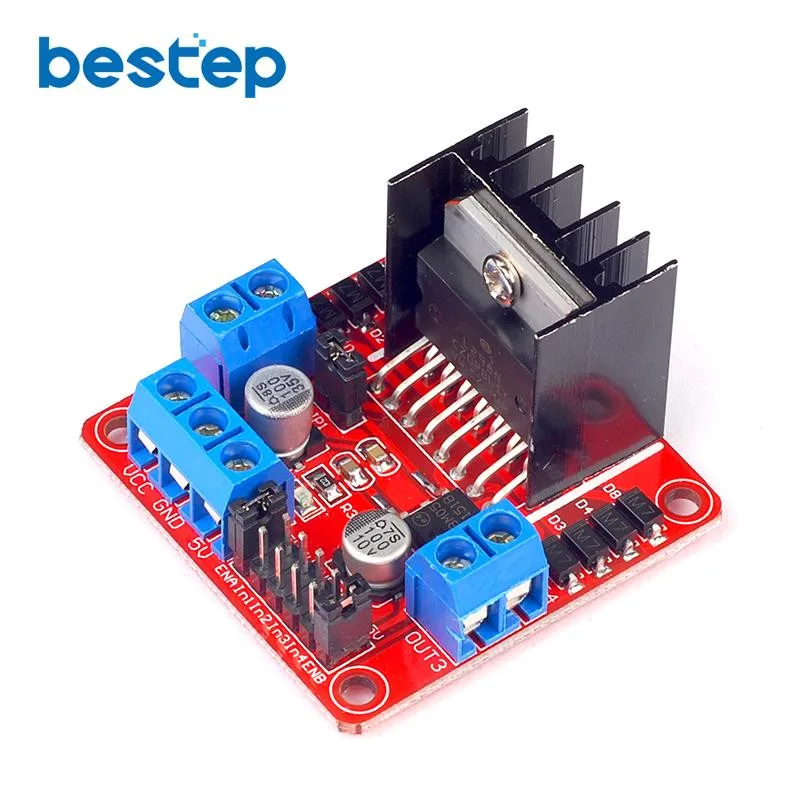 Умань
Умань
Доставка по Украине
84 грн
Купить
Интернет-магазин «FreeBuy.in.ua»
Драйвер двигателя MX1508 (аналог L298N)
Доставка из г. Кривой Рог
28 грн
Купить
Онлайн-магазин «КласМагаз»
Драйвер двох двигунів L298N
На складе
Доставка по Украине
85 грн
Купить
Інтернет-магазин «Мікроампер»
Модуль драйвера шагового двигателя L298
На складе
Доставка по Украине
73.80 грн
Купить
Магазин «Солдер»
Драйвер шагового двигателя TB6600 arduino
Введение
Что такое шаговый двигатель?
Шаговый двигатель представляет собой бесщеточный электродвигатель постоянного тока, который делит полный оборот на несколько равных шагов. Затем можно задать положение двигателя для перемещения и удержания на одном из этих шагов.
Как управлять шаговым двигателем?
Быстрый способ управления шаговым двигателем — это использование драйвера (контроллера) шагового двигателя.
TB6600 arduino — это простой в использовании профессиональный драйвер шагового двигателя, который может управлять двухфазным шаговым двигателем. Он совместим с Arduino и другими микроконтроллерами, которые могут выводить цифровой импульсный сигнал 5 В. Драйвер шагового двигателя TB6600 arduino имеет широкий диапазон потребляемой мощности, источник питания 9 ~ 42 В постоянного тока. И он способен выдавать пиковый ток 4А, чего достаточно для большинства шаговых двигателей.
Драйвер шагового двигателя поддерживает управление скоростью и направлением. Вы можете установить его микрошаг и выходной ток с помощью 6 DIP-переключателей. Имеется 7 видов микрошагов (1, 2/A, 2/B, 4, 8, 16, 32) и 8 видов контроля тока (0,5А, 1А, 1,5А, 2А, 2,5А, 2,8А, 3,0А). А, 3,5А) всего. И все сигнальные клеммы используют высокоскоростную изоляцию оптопары, что повышает ее способность противостоять высокочастотным помехам.
Как профессиональное устройство, он может управлять двухфазным, четырехфазным гибридным шаговым двигателем типа 57, 42.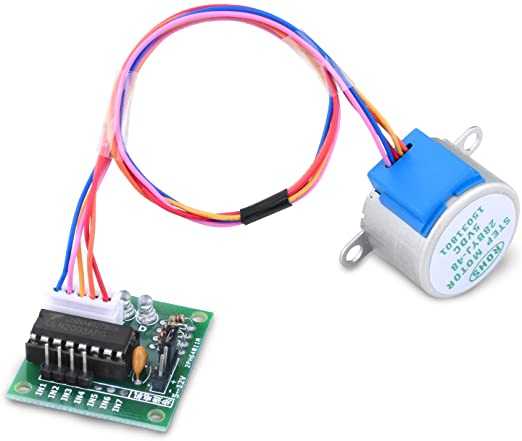
Примечание: это новейшая обновленная версия драйвера шагового двигателя TB6600.
DIY Alarm using Home Assistant, Konnected, and Sonoff RF Bridge
TB6600 5A Stepper motor driver and Arduino
Hardwares you needed:
Features
Спецификация
 ): 160 Вт
): 160 Вт
Проекты
Проект 1. Шаговый двигатель Nema23 и Arduino TB6600 (Краткое руководство для начинающих)
Проект 2. Arduino с библиотекой AccelStepper и контроллером шагового двигателя TB6600
Документы
Список доставки
Пожалуйста, включите комментарии.
Rugged Motor Driver — защищенные схемы Прочные промышленные микроконтроллеры Arduino
- Защита от обратного напряжения
Подключите блок питания в обратном направлении к большинству драйверов двигателей, и вы можете выбросить их в мусорное ведро.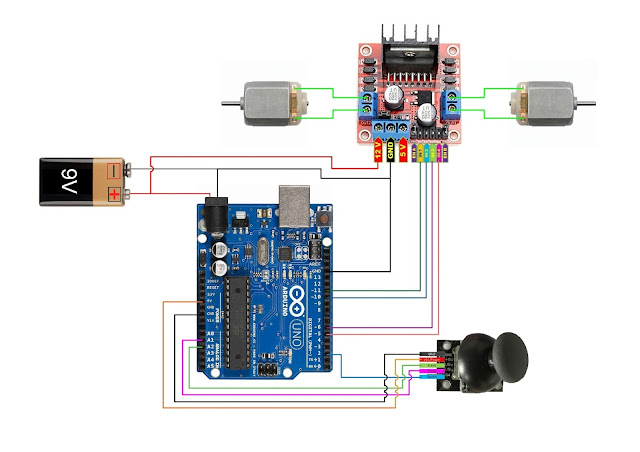 Не так с Rugged Motor Driver. Он полностью защищен от обратного напряжения до 40В. Благодаря этой функции и встроенным системам защиты устройств DRV8801 Rugged Motor Driver является надежным продуктом, который прощает ошибки.
Не так с Rugged Motor Driver. Он полностью защищен от обратного напряжения до 40В. Благодаря этой функции и встроенным системам защиты устройств DRV8801 Rugged Motor Driver является надежным продуктом, который прощает ошибки.
- Простой интерфейс включения/направления
Каждый двигатель (или фаза шагового двигателя) управляется только двумя входами: ВКЛЮЧЕНИЕ и НАПРАВЛЕНИЕ. Вход ENABLE может управляться выходом PWM для управления средним током двигателя. Вход DIRECTION управляет направлением тока. Эти четыре цифровых контакта полностью управляют двумя щеточными двигателями постоянного тока или одним биполярным шаговым двигателем. Этот интерфейс совместим с другими популярными драйверами двигателей Arduino. См. Соединения раздел ниже, чтобы узнать, как подключить эти сигналы.
- Используйте внешнее питание или питание Arduino
Вы можете либо использовать внешний источник напряжения (8–30 В), либо использовать питание Vin от Arduino. ПРИМЕЧАНИЕ: Для внешнего напряжения более 15 В необходимо отключить перемычку J21, когда экран подключен к Arduino (Ruggeduino работает до 24 В). Расположение этой перемычки см. на схеме ниже в разделе Connections .
ПРИМЕЧАНИЕ: Для внешнего напряжения более 15 В необходимо отключить перемычку J21, когда экран подключен к Arduino (Ruggeduino работает до 24 В). Расположение этой перемычки см. на схеме ниже в разделе Connections .
- Собранный, с клеммными колодками и штыревыми контактами в комплекте
Не нужно ничего паять, не нужно покупать дополнительные клеммы или штыревые разъемы (в отличие от некоторых других экранов драйверов двигателей), Rugged Motor Driver полностью собран и готов к работе. как щит Arduino, прямо из коробки. Для использования в качестве автономного драйвера двигателя припаяйте провода непосредственно к 6-контактному разъему J3 или приобретите наш комплект для модернизации Rugged Motor Driver и припаяйте к 6-контактной клеммной колодке с быстрым подключением.
- Соединительные разъемы
Вы можете установить еще один экран поверх экрана Rugged Motor Driver или использовать соединительные разъемы для подключения оголенных проводов к контактам ввода/вывода.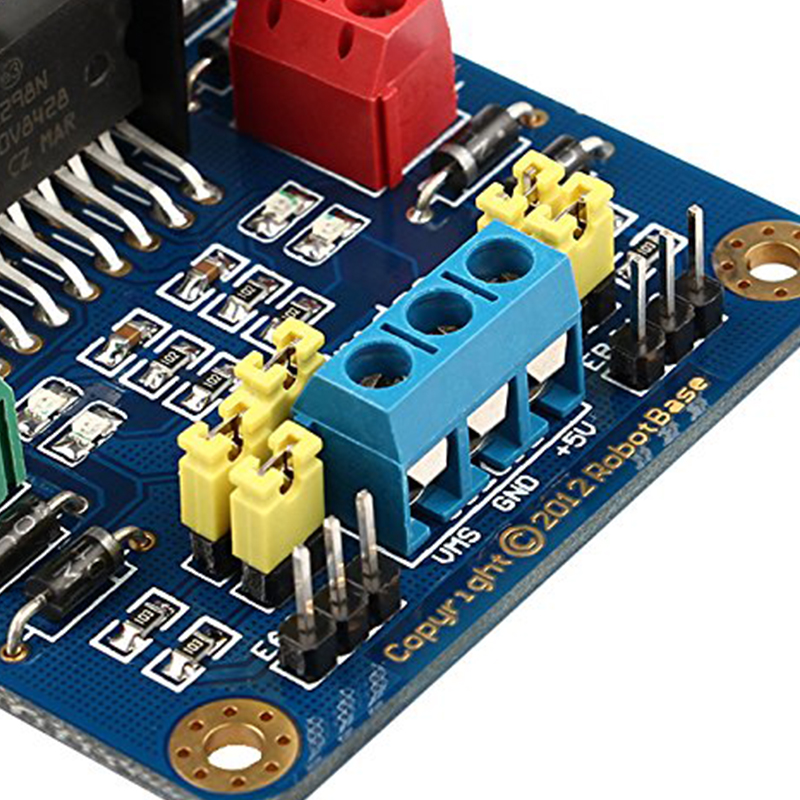
- Четыре светодиода состояния
Четыре светодиода общего назначения могут использоваться для отображения состояния двигателя. Требуются перемычки J15, J16, J6 и J7 (см. схему ниже).
- Конфигурируемые контакты управления для управления несколькими двигателями
В течение нескольких минут вы можете модифицировать Rugged Motor Driver для использования других управляющих контактов (требуется простая пайка). Вместе с разъемами для стекирования это означает, что вы можете складывать вместе несколько экранов Rugged Motor Driver и независимо управлять несколькими двигателями. Так как Arduino имеет 6 ШИМ-выходов, вы можете сложить вместе до 3-х плат и независимо управлять ШИМ-управлением 6-ю двигателями постоянного тока или 3-мя шаговыми двигателями. Подробнее ниже.
- Параллельные фазы для удвоения тока
Для привода одного двигателя постоянного тока можно соединить две выходные фазы параллельно и получить удвоенный выходной ток. Дополнительные сведения см. в наших примечаниях к заявке.
Дополнительные сведения см. в наших примечаниях к заявке.
Вот несколько примеров программ для демонстрации применения Rugged Motor Driver. Они предоставляются в виде файлов PDE (т. е. эскизов ) для использования в среде разработки Arduino.
- Базовое управление двигателем постоянного тока : Файл INO: rmcbasic.ino
Этот скетч демонстрирует простоту использования Rugged Motor Driver для управления направлением и вращением двух щеточных двигателей постоянного тока.
- Управление шаговым двигателем: Файл INO: stepperdemo.ino
Этот скетч демонстрирует управление шаговым двигателем с помощью клавиатуры. Откройте последовательный монитор (или любую другую терминальную программу) и используйте команды с одним нажатием клавиши для управления скоростью, направлением и мощностью шагового двигателя. См. документацию в скетче для заметок по использованию. В этом скетче используется встроенная библиотека Stepper, которая поставляется с программным обеспечением Arduino.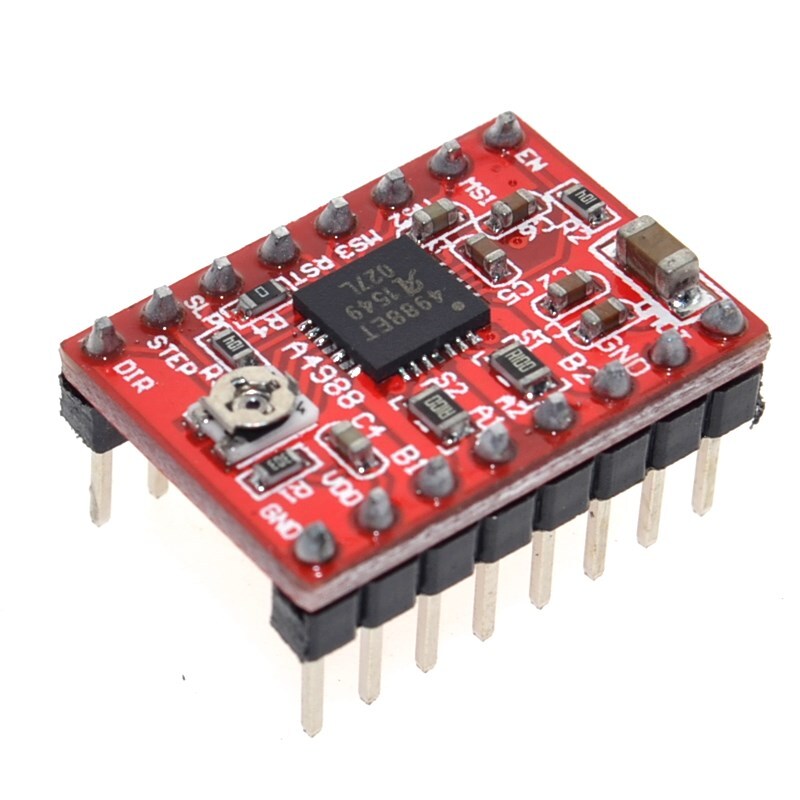
- Управление шаговым двигателем с ускорением : Файл INO: AccelStepperDemo.ino
Библиотека AccelStepper имеет больше функций, чем библиотека Stepper. На этом эскизе показан шаговый двигатель, вращающийся взад-вперед, медленно ускоряющийся и замедляющийся до конечного положения.
Библиотека AccelStepper также поддерживает несколько шаговых двигателей, что удобно, если вы хотите объединить несколько драйверов Rugged Motor Drivers (см. ниже, как это можно сделать).
ПРИМЕЧАНИЕ. Библиотека AF_Motor предназначена только для работы с моторным шилдом Adafruit и не будет работать с Rugged Motor Driver или другими драйверами моторов, которые напрямую управляют выводами драйвера мотора.
Базовое управление
Следующие выводы Arduino используются по умолчанию для управления двумя выходами двигателя.
Назначение контактов также можно изменить с помощью некоторых простых модификаций платы.
ENABLE1 и ENABLE2 могут управляться устойчивыми сигналами логического уровня (высокий уровень для включения питания двигателя, низкий уровень для его отключения) или управляться выходами PWM для плавного изменения среднего тока двигателя от нулевой мощности до полной мощности.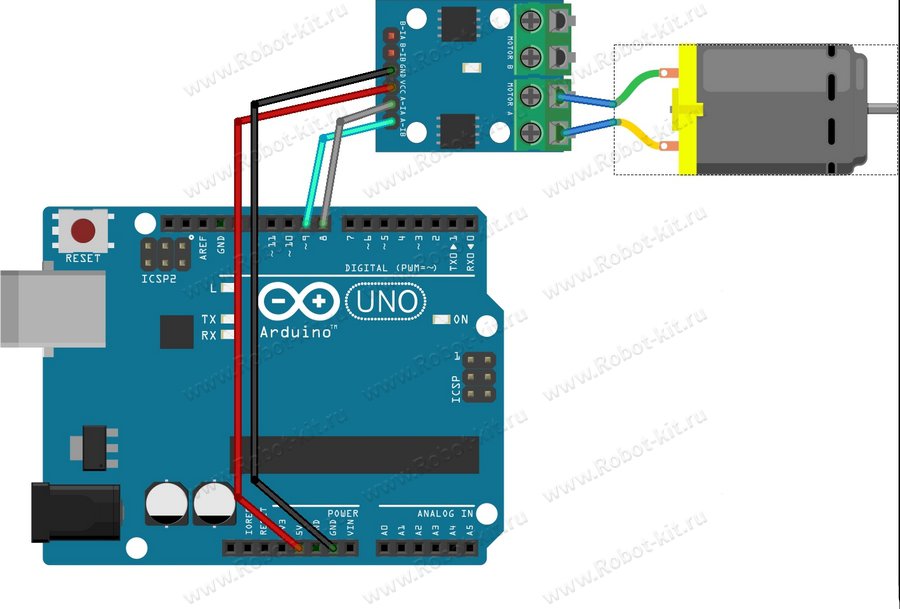
Сигналы НАПРАВЛЕНИЕ1 и НАПРАВЛЕНИЕ2 управляют направлением тока на каждом выходе двигателя, следовательно, направлением вращения щеточных двигателей постоянного тока.
Для шаговых двигателей эти два выхода направления должны подавать импульсы в правильной последовательности, чтобы обеспечить вращение вперед или назад. Библиотека Stepper обрабатывает эту логику за вас.
Светодиод также подключен к контакту D9. Доступны три других светодиода (на контактах D10, D16 и D17), но перед их использованием необходимо замкнуть перемычки (см. ниже).
Вход питания/выход двигателя
Клеммная колодка J4 обеспечивает дополнительное подключение внешнего источника питания 8–30 В. Вход внешнего напряжения VIN для Arduino также можно использовать для питания двигателей вместо подачи питания на J4.
Выходы двигателя доступны на клеммных колодках J1 и J2.
- Биполярный шаговый двигатель приводится в действие путем подключения каждой из его катушек к этим двум клеммным колодкам.
- Можно управлять двумя щеточными двигателями постоянного тока, подключив каждый двигатель к одной из этих двух клеммных колодок.
- Двигатель постоянного тока с одной щеткой может приводиться в действие при удвоенном токе путем параллельного подключения выходов двух клеммных блоков. Дополнительную информацию см. в этом примечании к заявке.
Обратите внимание, что по умолчанию вход питания на J4 и вход внешнего напряжения VIN соединены (разделены диодом, чтобы нельзя было наблюдать вход внешнего напряжения VIN на J4 — см. схему). Это означает, что при использовании внешних входов питания более 15 В перемычка J21 должна быть отключена, иначе это может привести к повреждению Arduino.0125, так как он был разработан только для напряжения VIN 15 В или меньше. При использовании Ruggeduino входное напряжение может достигать 24 В, прежде чем J21 придется отрезать. На схеме ниже показано положение перемычки J21.
Если перемычка J21 остается подключенной, то напряжение, подаваемое на клеммную колодку J4, может питать как двигатели, так и Arduino.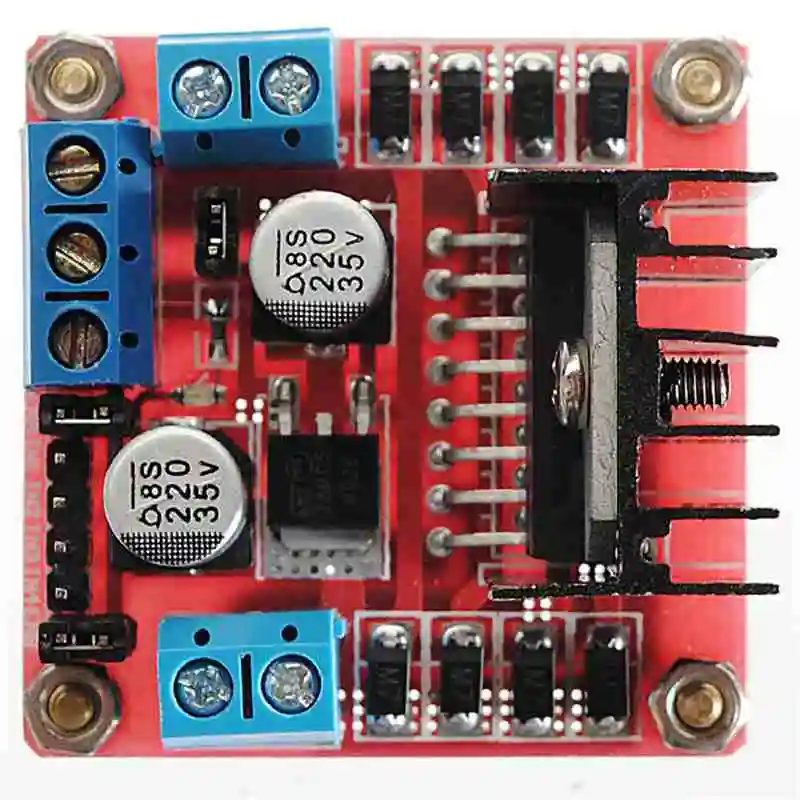
Питание, подаваемое через клеммную колодку J4, защищено от обратного напряжения до 40 В. Если поменять полярность проводов на этом разъёме (т.е. подать до -40В), то драйвер мотора не выйдет из строя.
Драйверы двигателей DRV8801 допускают положительное входное напряжение до 40 В, но мы рекомендуем ограничить подаваемое напряжение до 30 В. При переключении больших индуктивных нагрузок, таких как двигатели, может возникнуть обратная ЭДС, превышающая приложенное напряжение, особенно при быстром изменении направления тока в катушке (например, при шаговом двигателе). Вместо того, чтобы указывать абсолютное максимальное напряжение 40 В из таблицы данных DRV8801, мы считаем, что более разумно применять только 75% этого абсолютного максимального напряжения (30 В) при нормальной работе.
Переподключение управляющих входов
Если вы хотите использовать контакты, отличные от D3/D11/D12/D13, для управления вашими двигателями, вы можете сделать это с помощью некоторых простых модификаций платы. Вам потребуются:
Вам потребуются:
- канцелярский/канцелярский нож: они доступны по цене от 2 до 3 долларов США практически в любом магазине товаров для творчества или в хозяйственном магазине
- паяльник
- припой
- соединительный провод управляющие входы:
- Используйте канцелярский нож, чтобы разрезать соединение для контакта управления, который вы хотите отключить (один из D3/D11/D12/D13). Расположение перемычек см. на схеме выше или на схеме ниже в качестве примера.
- Припаяйте один конец провода к контактной площадке, которую вы хотите подключить к контакту Arduino.
- Припаяйте другой конец провода к нужной контактной площадке управляющего входа.
Например, вот схема Rugged Motor Driver, перемонтированная на схему управления, показанную в таблице ниже. Обратите внимание, что D5 является выходом с поддержкой ШИМ, поэтому он является подходящим выбором для управляющего входа ENABLE1.
Дополнительные соединения
Дополнительные контакты могут использоваться для использования функций Rugged Motor Driver.
 Эти контакты не подключены по умолчанию, чтобы обеспечить максимальную гибкость при использовании драйвера двигателя с другими схемами. Только 4 управляющих контакта D3, D11, D12 и D13 подключены к плате при поставке (вместе со светодиодом, подключенным к D9).).
Эти контакты не подключены по умолчанию, чтобы обеспечить максимальную гибкость при использовании драйвера двигателя с другими схемами. Только 4 управляющих контакта D3, D11, D12 и D13 подключены к плате при поставке (вместе со светодиодом, подключенным к D9).). Дополнительные штыревые соединения, показанные ниже, могут быть выполнены путем создания небольшой паяной перемычки между двумя контактами или установки 2-позиционного штырькового разъема 0,1 дюйма и использования закорачивающей перемычки. Наш комплект обновления Rugged Motor Driver включает в себя все необходимые штыревые разъемы и перемычки для выполнения любого соединения, показанного ниже. Дополнительные сведения об этих дополнительных перемычках и функциях контактов см. на схеме и в техническом описании DRV8801.
J15 — это специальная перемычка: это трехпозиционная перемычка, которая выбирает, какой контакт управляет линией ENABLE2. По умолчанию D11 управляет линией ENABLE2. Перерезав эту перемычку под платой, D9может использоваться для управления линией ENABLE2.

