Что такое драйвер шагового двигателя. Как работает драйвер шагового двигателя. Какие бывают типы драйверов шаговых двигателей. Как правильно подключить и настроить драйвер шагового двигателя. Как рассчитать и установить опорное напряжение Vref.
Что такое драйвер шагового двигателя и зачем он нужен
Драйвер шагового двигателя — это электронное устройство, которое управляет работой шагового двигателя. Его основная задача — преобразовывать управляющие сигналы от контроллера в токи и напряжения необходимые для вращения ротора шагового двигателя.
Основные функции драйвера шагового двигателя:
- Формирование необходимых токов в обмотках двигателя
- Обеспечение точного позиционирования ротора
- Реализация различных режимов микрошага
- Управление скоростью и направлением вращения
- Защита двигателя от перегрузок
Без драйвера невозможно корректное управление шаговым двигателем. Драйвер выступает посредником между управляющей электроникой и обмотками двигателя, обеспечивая их правильное взаимодействие.
Принцип работы драйвера шагового двигателя
Принцип работы драйвера шагового двигателя основан на коммутации токов в обмотках двигателя по определенному алгоритму. Рассмотрим основные этапы:
- Драйвер получает управляющие сигналы от контроллера (обычно это импульсы STEP и сигнал направления DIR).
- На основе этих сигналов драйвер формирует последовательность импульсов тока для обмоток двигателя.
- Силовые ключи драйвера коммутируют напряжение питания, подавая ток в нужные обмотки.
- За счет взаимодействия магнитных полей статора и ротора происходит поворот вала двигателя на заданный угол.
- Драйвер контролирует величину тока в обмотках с помощью ШИМ или линейного регулирования.
Таким образом, драйвер преобразует цифровые сигналы управления в аналоговые токи обмоток, обеспечивая точное позиционирование ротора шагового двигателя.
Основные типы драйверов шаговых двигателей
Существует несколько основных типов драйверов шаговых двигателей:
1. Биполярные драйверы
Наиболее распространенный тип. Управляют биполярными шаговыми двигателями, меняя направление тока в обмотках. Обеспечивают высокий момент и КПД. Примеры: A4988, DRV8825, TMC2209.

2. Униполярные драйверы
Предназначены для униполярных шаговых двигателей. Проще по конструкции, но обеспечивают меньший момент. Сейчас используются редко.
3. Драйверы с ШИМ-управлением током
Используют широтно-импульсную модуляцию для регулировки тока обмоток. Обеспечивают высокую эффективность, но могут создавать электромагнитные помехи.
4. Драйверы с линейным регулированием тока
Плавно регулируют ток в обмотках. Работают тише, но менее эффективны из-за больших потерь на нагрев.
5. Интеллектуальные драйверы
Имеют встроенный микроконтроллер и продвинутые функции управления. Позволяют настраивать параметры через программный интерфейс. Пример: серия TMC.
Как подключить и настроить драйвер шагового двигателя
Правильное подключение и настройка драйвера критически важны для корректной работы шагового двигателя. Рассмотрим основные этапы:
1. Подключение питания
Подключите источник питания к контактам VMOT (напряжение двигателя) и GND драйвера. Напряжение должно соответствовать рекомендованному для вашего шагового двигателя.
2. Подключение логического питания
Подайте логическое питание (обычно 3.3В или 5В) на контакты VDD и GND драйвера. Это питание нужно для работы логической части микросхемы.
3. Подключение обмоток двигателя
Подключите 4 вывода обмоток биполярного шагового двигателя к контактам 1A, 1B, 2A, 2B драйвера. Важно соблюдать правильную последовательность подключения.
4. Подключение управляющих сигналов
Соедините выводы STEP и DIR драйвера с соответствующими выходами вашего контроллера. Эти сигналы управляют шагами и направлением вращения.
5. Настройка микрошага
Установите нужный режим микрошага с помощью контактов MS1, MS2, MS3. Например, для драйвера A4988:
- MS1=0, MS2=0, MS3=0 — полный шаг
- MS1=1, MS2=0, MS3=0 — 1/2 шага
- MS1=0, MS2=1, MS3=0 — 1/4 шага
- MS1=1, MS2=1, MS3=0 — 1/8 шага
- MS1=1, MS2=1, MS3=1 — 1/16 шага
6. Установка ограничения тока
Настройте ограничение тока с помощью подстроечного резистора на драйвере. Это критически важный параметр, который нужно устанавливать в соответствии с характеристиками вашего двигателя.

Как рассчитать и установить Vref для драйвера шагового двигателя
Vref (опорное напряжение) — это важный параметр, который определяет максимальный ток через обмотки двигателя. Правильная установка Vref критична для оптимальной работы и защиты двигателя. Рассмотрим процесс на примере популярного драйвера A4988:
Формула для расчета Vref:
Vref = I_max * 8 * R_sense
Где:
- I_max — максимальный ток фазы двигателя (из документации)
- R_sense — сопротивление токоизмерительного резистора (обычно 0.1 Ом для A4988)
Пример расчета:
Допустим, ваш двигатель рассчитан на ток 1.5A. Тогда:
Vref = 1.5A * 8 * 0.1 Ом = 1.2В
Как установить Vref:
- Подключите мультиметр между выводом Vref драйвера и GND
- Подайте питание на драйвер
- Аккуратно вращайте подстроечный резистор, пока не получите расчетное значение Vref
- Закрепите резистор, чтобы настройка не сбилась
Важно: реальный ток может отличаться от расчетного из-за допусков компонентов. Рекомендуется начать с меньшего значения и постепенно увеличивать, контролируя нагрев двигателя.
Преимущества использования драйверов шаговых двигателей
Использование специализированных драйверов для управления шаговыми двигателями дает ряд существенных преимуществ:1. Точность позиционирования
Драйверы обеспечивают очень точное управление положением ротора, что критично для многих применений, например в 3D-принтерах или станках ЧПУ.
2. Высокий крутящий момент
За счет оптимального управления током обмоток драйверы позволяют получить максимальный момент от двигателя.
3. Плавность хода
Режимы микрошага (до 1/256 шага) обеспечивают очень плавное вращение без рывков.
4. Энергоэффективность
Современные драйверы оптимизируют энергопотребление, снижая нагрев и повышая КПД системы.
5. Защита двигателя
Драйверы имеют встроенную защиту от перегрузки по току и перегрева, что продлевает срок службы двигателя.
6. Простота управления
Драйвер берет на себя сложную работу по формированию токов в обмотках, позволяя управлять двигателем простыми цифровыми сигналами.
Как выбрать подходящий драйвер для шагового двигателя
Выбор правильного драйвера критически важен для оптимальной работы вашей системы с шаговым двигателем. Вот основные параметры, на которые стоит обратить внимание:

1. Тип двигателя
Убедитесь, что драйвер совместим с вашим типом двигателя (биполярный или униполярный).
2. Рабочее напряжение
Драйвер должен поддерживать напряжение питания вашего двигателя с небольшим запасом.
3. Максимальный ток
Выбирайте драйвер с максимальным током выше, чем номинальный ток фазы вашего двигателя.
4. Режимы микрошага
Если вам нужна высокая точность, выбирайте драйвер с большим числом микрошагов (например, 1/32 или 1/256).
5. Интерфейс управления
Убедитесь, что драйвер поддерживает нужный вам тип управления (STEP/DIR, SPI, UART и т.д.).
6. Защитные функции
Наличие защиты от перегрузки, перегрева и короткого замыкания повысит надежность системы.
7. Размер и форм-фактор
Учитывайте габариты драйвера и способ его монтажа, особенно для компактных устройств.
Драйвер шагового двигателя SMD-8.0DIN ver.2
Заказать
Описание в PDF
| Напряжение питания драйвера, В | 24…48 |
| Максимальный ток фазы двигателя, А | 0.1 — 8.0 |
| Макс. дробление шага двигателя | 1/128 |
| Способы управления | STEP / DIR, встроенный |
| Выходной сигнал FAULT, мА | 20 В, 100 мА |
Скачать паспорт .pdfОписание .pdf 3D модель .step
SMD‑8.0DIN ver.2 является драйвером шаговых двигателей нового поколения, выполненном на основе современной элементной базы. Драйвер поддерживает два режима работы — импульсное и аналоговое управлениедвигателем.
Способы управления шаговым двигателем
- Импульсное управление положением
- Аналоговое управление скоростью (встроенным потенциометром)
Два режима управления. В зависимости от поставленной задачи блок управления может использоваться в одном из двух режимов управления — импульсное управление положением для решения задач позиционирования, управление скоростью аналоговым сигналом — для задач поддержания и регулирования скорости.
Возможности драйвера SMD‑8.0DIN ver.2
- Встроенный тормозной резистор для работы с высокоинерционной нагрузкой
- Возможность подключения внешнего тормозного резистора
- Автоматический переход между токовым (с более высоким моментом и лучшей динамикой) и вольтовым (с более плавной и тихой работой) режимами управления фазами
- Дробление шага до 1/128
- Возможность инвертирования сигнала Enable
Крутящий момент и динамика шагового двигателя при использовании с драйвером SMD‑8.
 0DIN ver.2
0DIN ver.2
Принципиальное отличие этого драйвера от предыдущих исполнений – новая конструкция и улучшенная схемотехника, которые обеспечивают очень быстрый разгон и сохранение значительного крутящего момента на высоких скоростях. Разгон до скоростей 1000 об/мин и более может осуществляться за доли секунды. Рабочая скорость более 4000 об/мин с поддержанием крутящего момента, достаточного для выполнения полезной работы теперь доступна для большинства моделей шаговых двигателей.
Габаритные размеры драйвера шаговых двигателей SMD‑8.0DIN ver.2
Примеры подключения драйвера SMD‑8.0DIN ver.2
Допускается использование в качестве управляющих сигналов с уровнем напряжения 24 В, при условии подключения дополнительных токоограничивающих резисторов 1 кОм для входов DIR и ENABLE. Допускается использование сигналов STEP уровнем 24 В при подключении дополнительного токоограничивающего резистора 3 кОм.
В нормальном (рабочем) состоянии драйвера на входе ПЛК ERROR IN сигнал отсутствует. При возникновении аварийной ситуации на выходе FAULT драйвера разрывается соединение с землей (GND), и напряжение от источника G1 (24 В) через резистор 10 кОм попадает на вход ERROR IN ПЛК.
При штатном состоянии работы блока выход FAULT замкнут на GND, но в случае нештатной ситуации эта цепь размыкается. Аварийная остановка двигателя осуществляется сигналом на входе ENABLE уровня 0…1В (либо 4…12В при инверсном значении сигнала).
Выход FAULT, тип – открытый коллектор
В нормальном (рабочем) состоянии драйвера SMD–8.0DIN ver.2, между клеммами «FL+» и «FL-» присутствует сопротивление 150–160 Ом.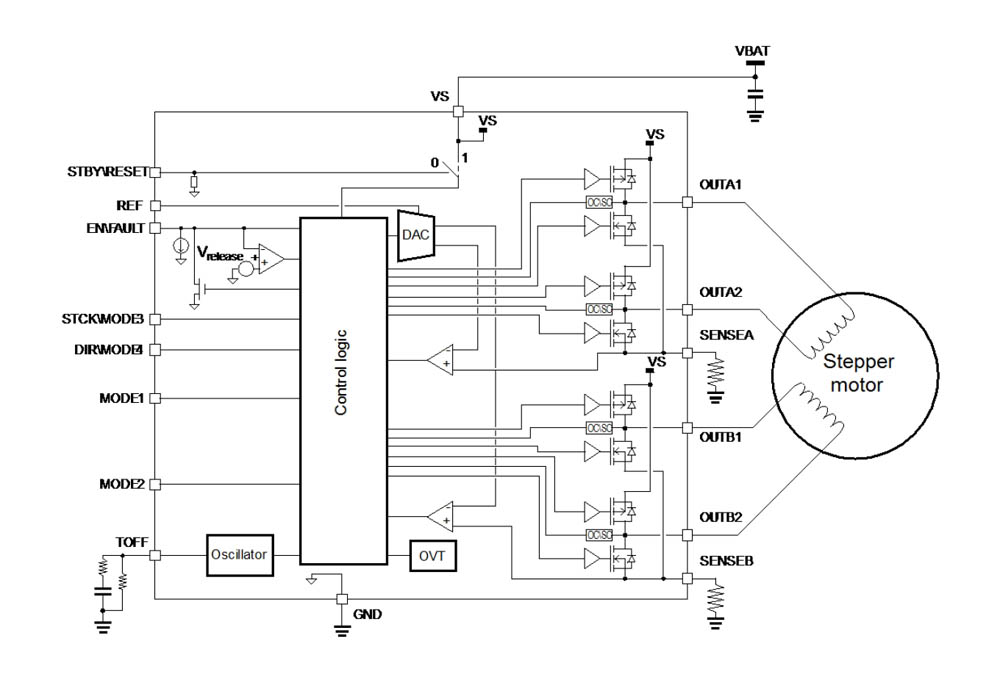 Светодиод VD1 светится. При возникновении аварийной ситуации сопротивление между клеммами стремится к бесконечности, VD1 — затухает.
Светодиод VD1 светится. При возникновении аварийной ситуации сопротивление между клеммами стремится к бесконечности, VD1 — затухает.
Связаться с нами
Хотите узнать дополнительную информацию о продукции — задайте вопрос. Наш специалист свяжется с вами в ближайшее время.
Как настроить драйверы шаговых двигателей: рассчитываем Vref
При замене драйверов необходимо выставлять правильное опорное напряжение, оно же Vref. Драйверы шаговых двигателей — это небольшие чипы, отвечающие за управление приводами на 3D-принтерах, лазерных граверах и других станках с ЧПУ. По сути, они контролируют подачу тока на двигатели.
A4988, TMC2208 и TMC2209 — распространенные драйверы, устанавливаемые на сменные модули или распаянные непосредственно на платах управления. Сменные модули разнятся от производителя к производителю, но, как правило, имеют схожую форму и совместимую распиновку. Отдельно отметим, что ряд управляющих плат поддерживает программное управление током, для них эта статья неприменима.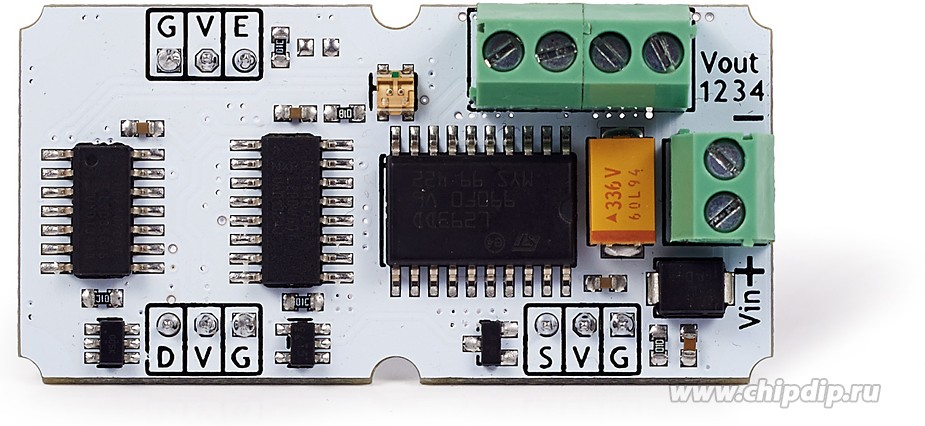
В этой статье мы разберемся шаг за шагом с расчетом важной настройки в шаговых двигателях — опорного напряжения или Vref. Инструкции затронут широко распространенные драйверы A4988, а также более продвинутые TMC2208 и TMC2209.
Что такое Vref
Vref означает «опорное напряжение» и измеряется в вольтах. На практике Vref определяет максимальный ток двигателя, точная настройка этого параметра важна для обеспечения правильного функционирования и длительной эксплуатации как драйверов, так и моторов.
У каждого шагового двигателя есть оптимальный диапазон тока. Слишком низкое значение может привести к пропуску шагов и возникновению дефектов в виде сдвига слоёв или пропусков подачи (для экструдера). С другой стороны, слишком высокое может привести к перегреву драйверов, это тоже приводит к пропуску шагов; также превышение допустимого тока может вывести из строя двигатель.
Что понадобится
Чтобы рассчитать правильное значение Vref для конкретного драйвера, первым делом необходимо выяснить значение номинального тока двигателей. Эта информация обычно предоставляется производителем, хотя для некоторых двигателей ее может быть сложно найти.
Эта информация обычно предоставляется производителем, хотя для некоторых двигателей ее может быть сложно найти.
Сообщество RepRap поддерживает детализированную базу данных по наиболее распространенным двигателям NEMA 17. Здесь можно найти необходимую информацию по маркировке на корпусе мотора. В качестве примера мы будем использовать NEMA 17 42SHDC3025-24B, согласно базе данных рассчитанный на ток силой 0,9 A.
Для настройки значения Vref непосредственно на плате потребуются насколько инструментов:
• цифровой мультиметр;
• материнская плата 3D-принтера или ЧПУ-станка с источником питания;
• пластиковая или керамическая отвертка, обычно на 1,5 мм.
Драйверы A4988
A4988 — один из наиболее распространенных типов драйверов в настольном оборудовании, включая 3D-принтеры. Эти чипы разработаны компанией Allegro MicroSystems и пользуются популярностью ввиду дешевизны.
Как рассчитать Vref
Опорное напряжение рассчитывается по простой формуле:
Vref = I x 8 x Rsense
I — это номинальный ток мотора, а Rsense означает сопротивление токоизмерительного резистора.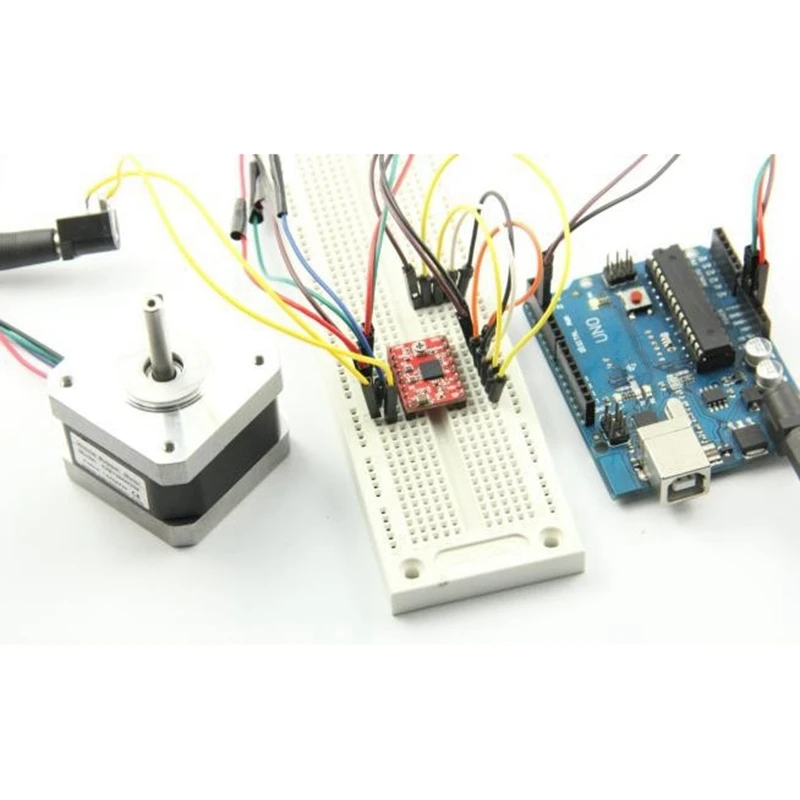 Rsense — постоянное значение, которое можно определить по маркировке на плате.
Rsense — постоянное значение, которое можно определить по маркировке на плате.
Сопротивление токоизмерительных резисторов варьируется от производителя к производителю, обычно в пределах 0,05-0.2 Ом. Найдите два резистора, как показано на иллюстрации выше. В нашем случае это резисторы R100 с сопротивлением 0,1 Ом.
Хотя мы будем использовать шаговый двигатель с номинальным током 0,9 A, выставлять максимальное значение не следует. Желательно понизить силу тока хотя бы на 10%, что в нашем случае означает примерно 0,8 А.
Считаем:
Vref = 0,81 х 8 х 0,1 = 0,64 В
Как настроить Vref с помощью потенциометра
Значение Vref мы рассчитали, осталось выставить его на драйвере. Платы драйверов A4988 оснащаются потенциометрами специально для этой цели.
Как это делается:
1. Установите драйвер на плату контроллера, не подключая питание. Если вы имеете дело с Ramps 1.4, не забудьте заодно подсоединить Arduino Mega.
2. Подайте питание на плату через VDD и GND, но не USB.
3. Выставите на мультиметре напряжение постоянного тока и правильную шкалу — в районе 2 В.
4. Коснитесь черным щупом GND, как показано на иллюстрации выше.
5. Красным щупом осторожно коснитесь потенциометра драйвера, чтобы измерить Vref.
Будьте аккуратны при работе с красным щупом: касание не в том месте потенциально может закоротить драйвер или контроллер.
Настройка тока драйверов осуществляется при отключенных моторах.
Теперь мы знаем текущее значение Vref и можем подогнать его под рассчитанное ранее с помощью отвертки. Это операцию может потребоваться провести несколько раз, внося изменения и проверяя результаты, пока не будет получено необходимое значение.
Если вы используете отвертку с пластиковым или керамическим кончиком, можно подкручивать потенциометр при подключенном питании без риска повреждения платы. Если же кончик металлический, лучше не рисковать и отключать питание во время настройки, а затем снова подключать питание для замера нового значения.
Направление вращения потенциометра зависит от производителя, поэтому в первой попытке ограничьтесь лишь небольшой корректировкой в ту или иную сторону и проверьте результат, чтобы понять в какую сторону крутить до необходимого значения.
Повторите операцию, пока не получите значение, максимально близкое к расчетному. Имейте в виду, что выставить абсолютно точное значение может быть трудной задачей, но чем ближе, тем лучше.
Дальше остается только проделать то же самое с остальными драйверами.
Драйверы TMC2208 и 2209
Драйверы с обозначениями TMC разработаны компанией Trinamic Motion Control. TMC2208 и TMC2209 — очень тихие варианты, поддерживающие дробление шагов до 1:256. Будучи современными драйверами они могут функционировать как самостоятельно, так и в режиме UART.
В режиме UART ток двигателя можно настроить через прошивку, а в самостоятельном режиме изменения необходимо вносить вручную. Процесс довольно схож с настройкой драйверов A4988.
Как рассчитать Vref
Процедура расчета Vref одинакова для TMC2208 и TMC2209. Формула выглядит вот так:
Irms — среднее квадратичное значение тока, а Rsense — сопротивление токоизмерительного резистора.
Значение Rsense можно выяснить по маркировке, точно так же как с A4988, только на этот раз ищите резисторы на нижней стороне платы. Чтобы рассчитать Irms просто поделите ток шагового двигателя на 1.4 (квадратный корень из двух).
Для иллюстрации процесса давайте рассчитаем Vref драйвера TMC2209 от BigTreeTech в связке с шаговым двигателем на 0,9 А. Имейте в виду, что максимальное значение тока для TMC2208 не должно превышать 1,2 A.
Rsense для этого драйвера — 0,11 Ом, так как используются резисторы R110. В нашей формуле используются миллиомы, так что берем 110 мОм. Ради безопасности силу тока вновь снижаем примерно на 10% от максимальной и получаем 0,8 А.
Дальше считаем по формуле и получаем значение Vref равное 0,8 В.
Как настроить Vref с помощью потенциометра
Ручная настройка Vref для TMC2208 и TMC2209 выполняется таким же образом, как для A4988, с той лишь разницей, что красным щупом необходимо замерять в другом месте. Где щупать — показано на иллюстрации выше, на всякий случай все же сначала проверьте документацию от производителя.
Все остальные шаги и рекомендации по настройке Vref на TMC2208 и TMC2209 точно такие же, как для A4988.
Перевод статьи Vref Calculator: How to Tune Your Stepper Driver. Оригинал размещен на сайте All3DP по этой ссылке.
A4988 Держатель драйвера шагового двигателя
| A4983/A4988 Держатель драйвера шагового двигателя с размерами. |
|---|
Обзор
Этот продукт представляет собой плату-носитель или коммутационную плату для микрошагового драйвера Allegro A4988 DMOS с преобразователем и защитой от перегрузки по току; поэтому мы рекомендуем внимательно прочитать техническое описание A4988 (1 МБ в формате pdf) перед использованием этого продукта. Этот драйвер шагового двигателя позволяет управлять одним биполярным шаговым двигателем с выходным током до 2 А на катушку (см.0017 Рекомендации по рассеиванию мощности (см. раздел ниже для получения дополнительной информации). Вот некоторые из ключевых особенностей драйвера:
Этот драйвер шагового двигателя позволяет управлять одним биполярным шаговым двигателем с выходным током до 2 А на катушку (см.0017 Рекомендации по рассеиванию мощности (см. раздел ниже для получения дополнительной информации). Вот некоторые из ключевых особенностей драйвера:
- Простой интерфейс управления шагом и направлением
- Пять различных шагов разрешения: полный шаг, полшага, четверть шага, восьмой шаг и шестнадцатый шаг
- Регулируемое управление током позволяет установить максимальный выходной ток с помощью потенциометра, что позволяет использовать напряжения выше номинального напряжения шагового двигателя для достижения более высокой частоты шагов
- Настроен на смешанный режим затухания
- Тепловое отключение при перегреве, блокировка при пониженном напряжении и защита от перегрузки по току
- Защита от короткого замыкания на землю и нагрузки
Этот продукт поставляется со всеми компонентами для поверхностного монтажа, включая микросхему драйвера A4988, установленными, как показано на изображении продукта.
Этот продукт поставляется в индивидуальной упаковке с 0,1-дюймовыми контактными штырьками, входящими в комплект, но не припаянными; у нас также есть версия с уже впаянными контактными штырями. Для клиентов, заинтересованных в больших объемах при более низкой удельной стоимости, мы предлагаем версию в упаковке без штырей и версию с установленными штырями.
У нас также есть множество других вариантов драйверов шаговых двигателей в том же форм-факторе с различными рабочими профилями и функциями.
Некоторыми униполярными шаговыми двигателями (например, с шестью или восемью выводами) этот драйвер может управлять как биполярными шаговыми двигателями. Для получения дополнительной информации см. часто задаваемые вопросы. Униполярные двигатели с пятью выводами не могут использоваться с этим драйвером.
Аппаратное обеспечение в комплекте
Держатель драйвера шагового двигателя A4988 поставляется с одним 1×16-контактным отрывным разъемом 0,1 дюйма. Разъемы можно впаивать для использования с непаянными макетными платами или разъемами 0,1 дюйма.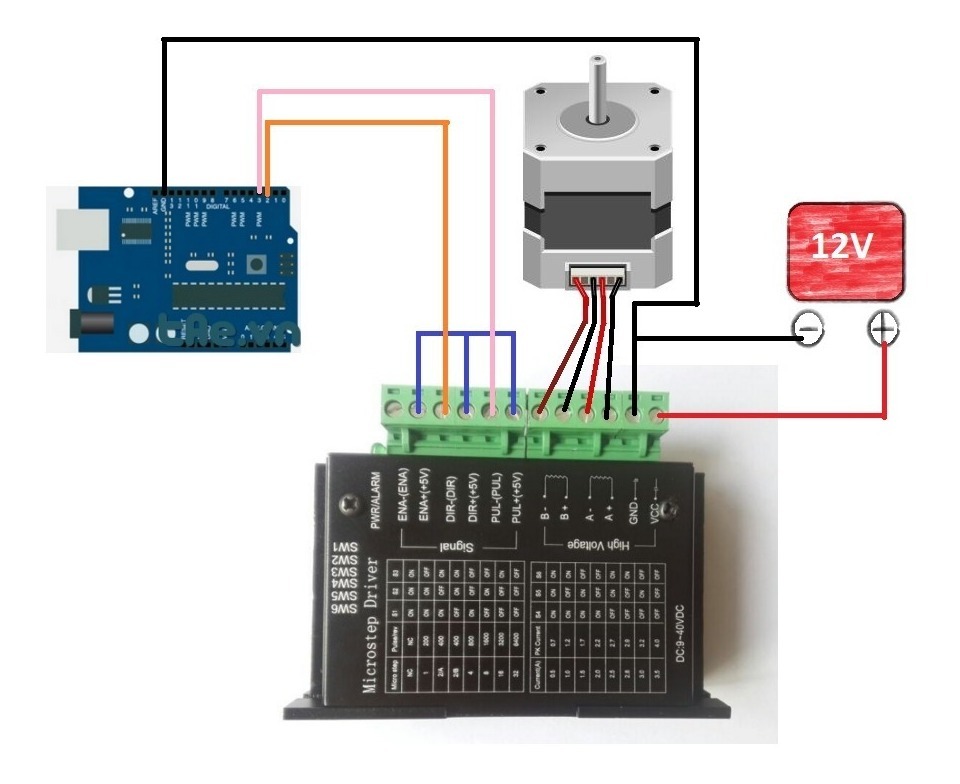 Вы также можете припаять выводы двигателя и другие соединения непосредственно к плате. (Также доступна версия этой платы с уже установленными разъемами.)
Вы также можете припаять выводы двигателя и другие соединения непосредственно к плате. (Также доступна версия этой платы с уже установленными разъемами.)
| |
|
Использование драйвера
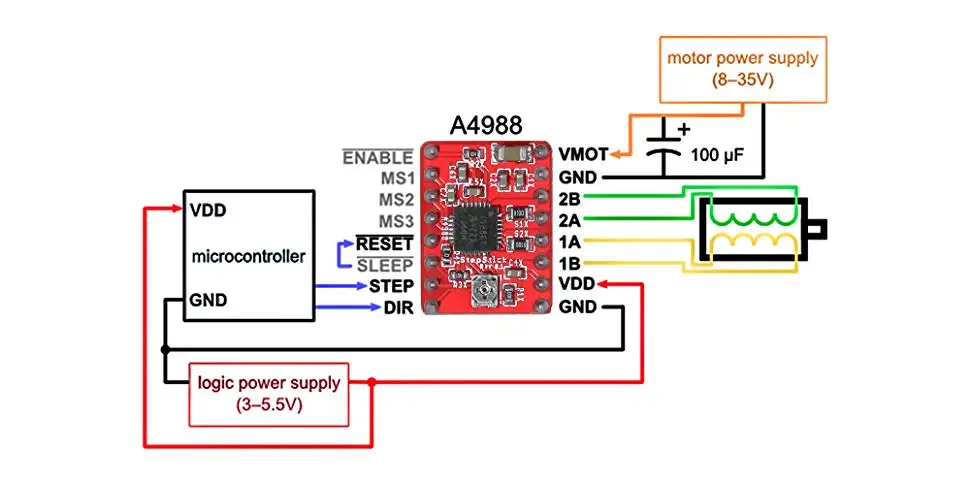
| Минимальная схема подключения микроконтроллера к шасси драйвера шагового двигателя A4988 (полношаговый режим). |
|---|
Силовые соединения
Драйверу требуется, чтобы напряжение питания логики (от 3 В до 5,5 В) было подключено к контактам VDD и GND, а напряжение питания двигателя (8–35 В) было подключено к контактам VMOT и GND. . Эти источники питания должны иметь соответствующие развязывающие конденсаторы рядом с платой и должны обеспечивать ожидаемые токи (пики до 4 А для питания двигателя).
Предупреждение: В этой несущей плате используются керамические конденсаторы с низким ESR, что делает ее восприимчивой к разрушительным скачкам напряжения LC, особенно при использовании проводов питания длиннее нескольких дюймов. При определенных условиях эти всплески могут превысить максимальное номинальное напряжение 35 В для A4988 и необратимо повредить плату, даже если напряжение питания двигателя составляет всего 12 В. Один из способов защитить драйвер от таких всплесков — поставить большой (не менее 47 мкФ) электролитический конденсатор по мощности двигателя (VMOT) и земле где-то рядом с платой.
При определенных условиях эти всплески могут превысить максимальное номинальное напряжение 35 В для A4988 и необратимо повредить плату, даже если напряжение питания двигателя составляет всего 12 В. Один из способов защитить драйвер от таких всплесков — поставить большой (не менее 47 мкФ) электролитический конденсатор по мощности двигателя (VMOT) и земле где-то рядом с платой.
Соединения двигателей
Четырех-, шести- и восьмипроводные шаговые двигатели могут управляться A4988, если они правильно подключены; Ответ на часто задаваемые вопросы подробно объясняет правильную проводку.
Предупреждение: Подключение или отключение шагового двигателя при включенном драйвере может вывести его из строя. (В более общем случае изменение проводки чего-либо, когда оно находится под напряжением, вызывает проблемы.)
Размер шага (и микрошага)
Шаговые двигатели обычно имеют спецификацию размера шага (например, 1,8° или 200 шагов на оборот), которая относится к полным шагам. . Микрошаговый драйвер, такой как A4988 позволяет получить более высокое разрешение за счет размещения промежуточных ступеней, что достигается за счет питания катушек промежуточными уровнями тока. Например, управление двигателем в четвертьшаговом режиме даст двигателю с 200 шагами на оборот 800 микрошагов на оборот при использовании четырех различных уровней тока.
. Микрошаговый драйвер, такой как A4988 позволяет получить более высокое разрешение за счет размещения промежуточных ступеней, что достигается за счет питания катушек промежуточными уровнями тока. Например, управление двигателем в четвертьшаговом режиме даст двигателю с 200 шагами на оборот 800 микрошагов на оборот при использовании четырех различных уровней тока.
Входы селектора разрешения (размера шага) (MS1, MS2 и MS3) позволяют выбрать один из пяти шагов разрешения в соответствии с таблицей ниже. MS1 и MS3 имеют внутренние подтягивающие резисторы на 100 кОм, а MS2 имеет внутренний подтягивающий резистор на 50 кОм, поэтому отключение этих трех контактов выбора микрошага приводит к полношаговому режиму. Чтобы микрошаговые режимы работали правильно, ограничение тока должно быть установлено достаточно низким (см. ниже), чтобы сработало ограничение тока. В противном случае промежуточные уровни тока не будут правильно поддерживаться, и двигатель будет пропускать микрошаги.
| MS1 | МС2 | МС3 | Разрешение микрошага |
|---|---|---|---|
| Низкий | Низкий | Низкий | Полный шаг |
| Высокий | Низкий | Низкий | Полушаг |
| Низкий | Высокий | Низкий | Четверть шага |
| Высокий | Высокий | Низкий | Восьмой шаг |
| Высокий | Высокий | Высокий | Шестнадцатый шаг |
Входы управления
Каждый импульс на вход STEP соответствует одному микрошагу шагового двигателя в направлении, выбранном выводом DIR. Обратите внимание, что выводы STEP и DIR не подключены к какому-либо определенному внутреннему напряжению, поэтому вы не должны оставлять ни один из этих выводов плавающим в своем приложении. Если вам просто нужно вращение в одном направлении, вы можете напрямую связать DIR с VCC или GND. Микросхема имеет три различных входа для управления многочисленными состояниями питания: RST, SLP и EN. Дополнительные сведения об этих состояниях питания см. в техническом описании. Обратите внимание, что контакт RST является плавающим; если вы не используете контакт, вы можете подключить его к соседнему контакту SLP на печатной плате, чтобы перевести его в высокий уровень и включить плату.
Обратите внимание, что выводы STEP и DIR не подключены к какому-либо определенному внутреннему напряжению, поэтому вы не должны оставлять ни один из этих выводов плавающим в своем приложении. Если вам просто нужно вращение в одном направлении, вы можете напрямую связать DIR с VCC или GND. Микросхема имеет три различных входа для управления многочисленными состояниями питания: RST, SLP и EN. Дополнительные сведения об этих состояниях питания см. в техническом описании. Обратите внимание, что контакт RST является плавающим; если вы не используете контакт, вы можете подключить его к соседнему контакту SLP на печатной плате, чтобы перевести его в высокий уровень и включить плату.
Ограничение тока
Одним из способов максимизировать производительность шагового двигателя является использование максимально возможного для вашего приложения напряжения.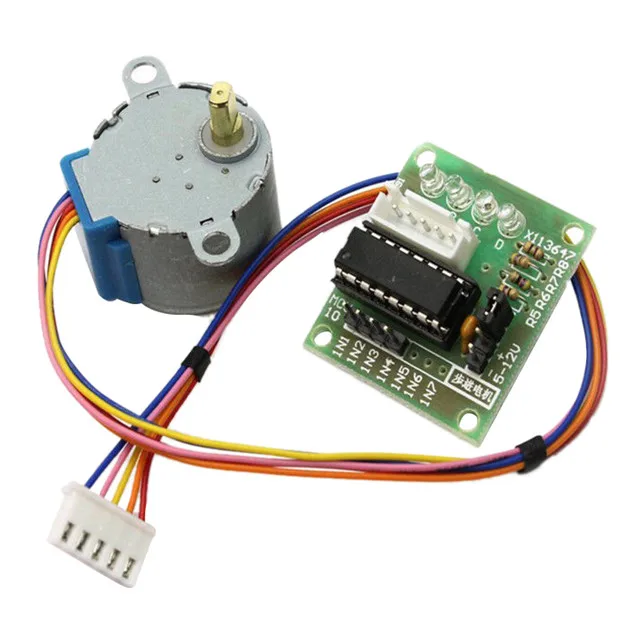 В частности, увеличение напряжения обычно позволяет увеличить скорость шага и вращающий момент шага, поскольку ток в катушках может изменяться быстрее после каждого шага. Однако, чтобы безопасно использовать напряжения выше номинального напряжения шагового двигателя, ток катушки должен активно ограничиваться, чтобы не допустить превышения номинального тока двигателя.
В частности, увеличение напряжения обычно позволяет увеличить скорость шага и вращающий момент шага, поскольку ток в катушках может изменяться быстрее после каждого шага. Однако, чтобы безопасно использовать напряжения выше номинального напряжения шагового двигателя, ток катушки должен активно ограничиваться, чтобы не допустить превышения номинального тока двигателя.
A4988 поддерживает такое активное ограничение тока, а подстроечный потенциометр на плате можно использовать для установки ограничения тока. Одним из способов установки ограничения тока является перевод драйвера в полношаговый режим и измерение тока, протекающего через одну катушку двигателя, при регулировке потенциометра ограничения тока. Это должно быть сделано с двигателем, удерживающим фиксированное положение (т. е. без тактирования входа STEP). Обратите внимание, , что измеряемый ток составляет всего 70% от фактической настройки ограничения тока , так как обе катушки всегда включены и ограничены этим значением в полношаговом режиме, поэтому, если вы позже включите микрошаговые режимы, ток через катушки сможет превысить этот измеренный полношаговый ток на 40% (1/0,7 ) на определенных шагах; пожалуйста, примите это во внимание при использовании этого метода для установки ограничения тока. Также обратите внимание, что вам нужно будет выполнить эту регулировку снова, если вы когда-либо изменяли логическое напряжение, Vdd, так как опорное напряжение, которое устанавливает ограничение тока, является функцией Vdd.
Также обратите внимание, что вам нужно будет выполнить эту регулировку снова, если вы когда-либо изменяли логическое напряжение, Vdd, так как опорное напряжение, которое устанавливает ограничение тока, является функцией Vdd.
Примечание: Ток катушки может сильно отличаться от тока источника питания, поэтому не следует использовать ток, измеренный на источнике питания, для установки ограничения тока. Подходящим местом для установки вашего амперметра является последовательное соединение с одной из катушек вашего шагового двигателя.
Другой способ установить ограничение тока — рассчитать опорное напряжение, соответствующее желаемому ограничению тока, а затем отрегулировать потенциометр ограничения тока до тех пор, пока не будет измерено это напряжение на
.0085 VREF пин. Напряжение на выводе VREF доступно через переходное отверстие, обведенное кружком в нижней части печатной платы. Ограничение тока, I MAX , относится к эталонному напряжению следующим образом:
«I_(MAX) = (V_(REF)) / (8 * R_(CS))«
или, переставленное для решения для VREF:
«V_(REF) = 8 * I_(MAX) * R_(CS)«
R CS сопротивление измерения тока; в оригинальных версиях этой платы использовались резисторы 0,050 Ом , но мы переключились на использование 9 резисторов.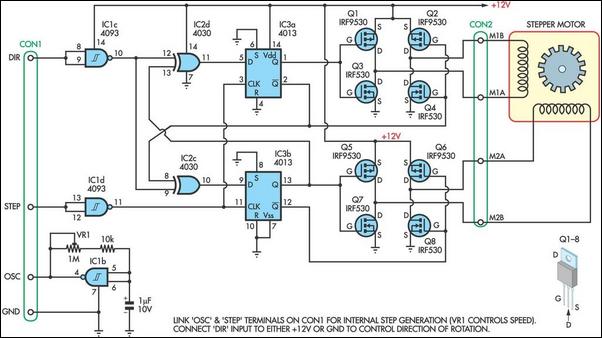 0085 0,068 Ом токоизмерительных резисторов в январе 2017 года, что делает более полезным диапазон регулировки потенциометра. На следующем рисунке показано, как определить, какие токоизмерительные резисторы установлены на вашей плате:
0085 0,068 Ом токоизмерительных резисторов в январе 2017 года, что делает более полезным диапазон регулировки потенциометра. На следующем рисунке показано, как определить, какие токоизмерительные резисторы установлены на вашей плате:
| Идентификация оригинальных измерительных резисторов 50 мОм (слева) и 68 мОм (справа), представленных в январе 2017 г. |
|---|
Так, например, если вы хотите установить ограничение тока на 1 А и у вас есть плата с резисторами 68 мОм, вы должны установить VREF на 540 мВ. Это гарантирует, что, даже если ток через каждую катушку меняется от шага к шагу, величина вектора тока в шаговом двигателе остается постоянной на уровне 1 А: 92) = I_(MAX) = 1 text (A)«
Если вместо этого вы хотите, чтобы ток через для каждой катушки составлял 1 А в полношаговом режиме, вам нужно установить ограничение тока на 40 %. выше, или 1,4 А, поскольку катушки ограничены примерно 70 % от установленного предельного тока в полношаговом режиме (приведенное выше уравнение показывает, почему это так). Чтобы сделать это с платой с чувствительными резисторами 68 мОм, вы должны установить VREF на 770 мВ.
Чтобы сделать это с платой с чувствительными резисторами 68 мОм, вы должны установить VREF на 770 мВ.
Соображения по рассеиваемой мощности
ИС драйвера A4988 имеет максимальный номинальный ток 2 А на катушку, но фактический ток, который вы можете обеспечить, зависит от того, насколько хорошо вы можете поддерживать охлаждение ИС. Печатная плата носителя предназначена для отвода тепла от ИС, но для подачи более приблизительно 1 А на катушку требуется радиатор или другой метод охлаждения.
Этот продукт может нагреть до такой степени, что обожжет вас задолго до того, как чип перегреется. Будьте осторожны при обращении с этим продуктом и другими компонентами, связанными с ним.
Обратите внимание, что измерение потребляемого тока в источнике питания, как правило, не обеспечивает точного измерения тока катушки. Поскольку входное напряжение драйвера может быть значительно выше, чем напряжение катушки, измеренный ток источника питания может быть немного ниже, чем ток катушки (драйвер и катушка в основном действуют как импульсный понижающий источник питания). Кроме того, если напряжение питания очень велико по сравнению с тем, что необходимо двигателю для достижения установленного тока, рабочий цикл будет очень низким, что также приводит к значительным различиям между средним и среднеквадратичным токами.
Кроме того, если напряжение питания очень велико по сравнению с тем, что необходимо двигателю для достижения установленного тока, рабочий цикл будет очень низким, что также приводит к значительным различиям между средним и среднеквадратичным токами.
Схематическая диаграмма
| Схематическая диаграмма держателя драйвера шагового двигателя A4988 (зеленая и черная версии). |
|---|
Примечание: Эта плата является заменой нашего оригинального (и в настоящее время снятого с производства) держателя драйвера шагового двигателя A4983. Более новый A4988 предлагает защиту от перегрузки по току и имеет внутреннее понижение 100k на выводе выбора микрошага MS1, но в остальном он практически идентичен A49.83.
A4988 Держатель драйвера шагового двигателя, Black Edition
| A4988 Держатель драйвера шагового двигателя, Black Edition, вид снизу с размерами. |
|---|

Обзор
Этот продукт представляет собой плату-носитель или коммутационную плату для микрошагового драйвера Allegro A4988 DMOS с преобразователем и защитой от перегрузки по току; поэтому мы рекомендуем внимательно прочитать техническое описание A4988 (1 МБ в формате pdf) перед использованием этого продукта. Этот драйвер шагового двигателя позволяет управлять одним биполярным шаговым двигателем с выходным током до 2 А на катушку (см.0017 Рекомендации по рассеиванию мощности (см. раздел ниже для получения дополнительной информации). Вот некоторые из ключевых особенностей драйвера:
- Простой интерфейс управления шагом и направлением
- Пять различных шагов разрешения: полный шаг, полшага, четверть шага, восьмой шаг и шестнадцатый шаг
- Регулируемое управление током позволяет установить максимальный выходной ток с помощью потенциометра, что позволяет использовать напряжения выше номинального напряжения шагового двигателя для достижения более высокой частоты шагов
- Настроен на смешанный режим затухания
- Тепловое отключение при перегреве, блокировка при пониженном напряжении и защита от перегрузки по току
- Защита от короткого замыкания на землю и нагрузки
- 4-слойная медная печатная плата весом 2 унции для улучшенного рассеивания тепла
- Открытая площадка для пайки заземления под микросхемой драйвера в нижней части печатной платы
Этот продукт поставляется со всеми компонентами для поверхностного монтажа, включая микросхему драйвера A4988, установленными, как показано на изображении продукта.
Этот продукт поставляется в индивидуальной упаковке с 0,1-дюймовыми контактными штырьками, входящими в комплект, но не припаянными; у нас также есть версия с уже впаянными контактными штырями. Для клиентов, заинтересованных в больших объемах при более низкой удельной стоимости, мы предлагаем версию в упаковке без штырей и версию с установленными штырями.
Black Edition имеет ту же компоновку компонентов и распиновку, что и наш держатель драйвера шагового двигателя A4988, поэтому его можно использовать в качестве более производительной замены в приложениях, разработанных для наших оригинальных драйверов. Black Edition обеспечивает более высокую производительность благодаря четырехслойной печатной плате (PCB), которая лучше отводит тепло от A49.88 — в то время как наш оригинальный носитель может выдавать до 1 А на фазу в полношаговом режиме без радиатора или воздушного потока, Black Edition может выдавать примерно до 1,2 А при тех же условиях.
У нас также есть множество других вариантов драйверов шаговых двигателей в том же форм-факторе с различными рабочими профилями и функциями.
Некоторыми униполярными шаговыми двигателями (например, с шестью или восемью выводами) этот драйвер может управлять как биполярными шаговыми двигателями. Для получения дополнительной информации см. часто задаваемые вопросы. Униполярные двигатели с пятью выводами не могут использоваться с этим драйвером.
Аппаратное обеспечение в комплекте
Держатель драйвера шагового двигателя A4988 поставляется с одним 1×16-контактным отрывным разъемом 0,1 дюйма. Разъемы можно впаивать для использования с непаянными макетными платами или разъемами 0,1 дюйма. Вы также можете припаять выводы двигателя и другие соединения непосредственно к плате. (Также доступна версия этой платы с уже установленными разъемами).
Использование драйвера
| Минимальная схема подключения микроконтроллера к шасси драйвера шагового двигателя A4988 (полношаговый режим). |
|---|
Силовые соединения
Драйверу требуется, чтобы напряжение питания логики (3–5,5 В) было подключено к контактам VDD и GND, а напряжение питания двигателя (8–35 В) должно быть подключено к контактам VMOT и GND.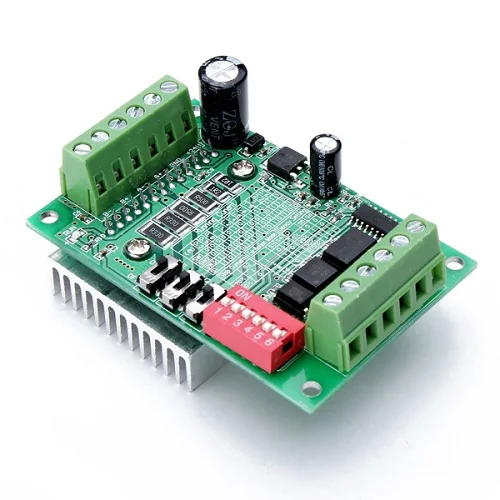 Эти источники питания должны иметь соответствующие развязывающие конденсаторы рядом с платой и должны обеспечивать ожидаемые токи (пики до 4 А для питания двигателя).
Эти источники питания должны иметь соответствующие развязывающие конденсаторы рядом с платой и должны обеспечивать ожидаемые токи (пики до 4 А для питания двигателя).
Предупреждение: В этой несущей плате используются керамические конденсаторы с низким ESR, что делает ее восприимчивой к разрушительным скачкам напряжения LC, особенно при использовании проводов питания длиннее нескольких дюймов. При определенных условиях эти всплески могут превысить максимальное номинальное напряжение 35 В для A4988 и необратимо повредить плату, даже если напряжение питания двигателя составляет всего 12 В. Один из способов защитить драйвер от таких всплесков — поставить большой (не менее 47 мкФ) электролитический конденсатор по мощности двигателя (VMOT) и земле где-то рядом с платой.
Соединения двигателей
Четырех-, шести- и восьмипроводные шаговые двигатели могут управляться A4988, если они правильно подключены; Ответ на часто задаваемые вопросы подробно объясняет правильную проводку.
Предупреждение: Подключение или отключение шагового двигателя при включенном драйвере может вывести его из строя. (В более общем случае изменение проводки чего-либо, когда оно находится под напряжением, вызывает проблемы.)
Размер шага (и микрошага)
Шаговые двигатели обычно имеют спецификацию размера шага (например, 1,8° или 200 шагов на оборот), которая относится к полным шагам. . Микрошаговый драйвер, такой как A4988 позволяет получить более высокое разрешение за счет размещения промежуточных ступеней, что достигается за счет питания катушек промежуточными уровнями тока. Например, управление двигателем в четвертьшаговом режиме даст двигателю с 200 шагами на оборот 800 микрошагов на оборот при использовании четырех различных уровней тока.
Входы селектора разрешения (размера шага) (MS1, MS2 и MS3) позволяют выбрать один из пяти шагов разрешения в соответствии с таблицей ниже. MS1 и MS3 имеют внутренние подтягивающие резисторы на 100 кОм, а MS2 имеет внутренний подтягивающий резистор на 50 кОм, поэтому отключение этих трех контактов выбора микрошага приводит к полношаговому режиму.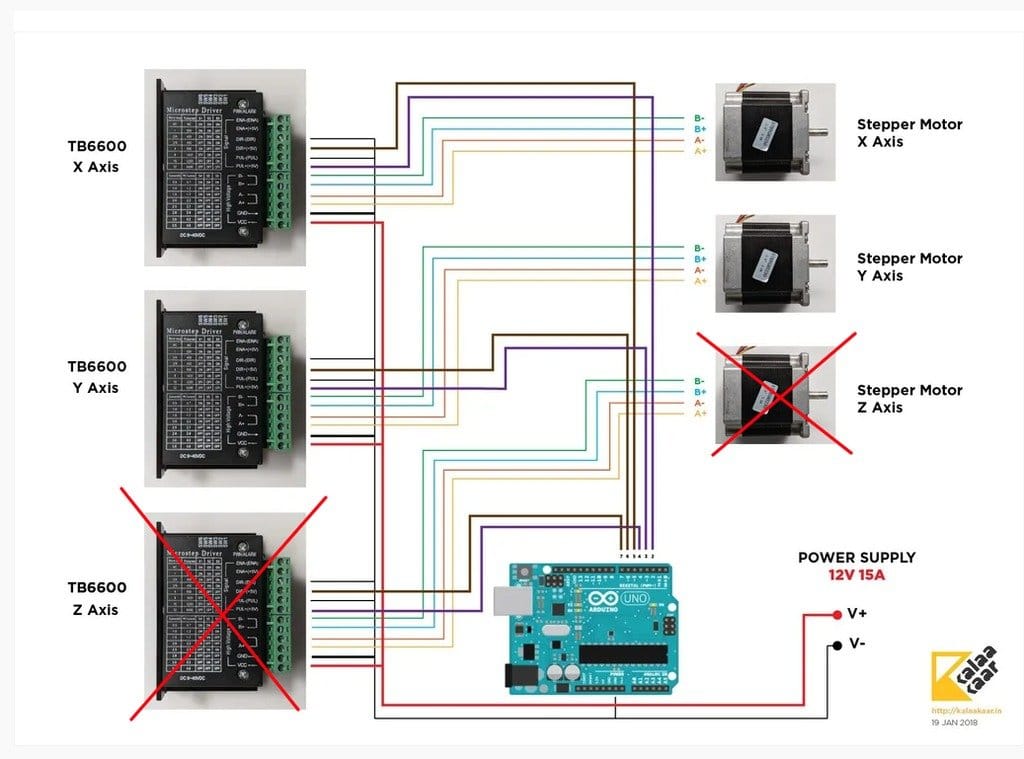 Чтобы микрошаговые режимы работали правильно, ограничение тока должно быть установлено достаточно низким (см. ниже), чтобы сработало ограничение тока. В противном случае промежуточные уровни тока не будут правильно поддерживаться, и двигатель будет пропускать микрошаги.
Чтобы микрошаговые режимы работали правильно, ограничение тока должно быть установлено достаточно низким (см. ниже), чтобы сработало ограничение тока. В противном случае промежуточные уровни тока не будут правильно поддерживаться, и двигатель будет пропускать микрошаги.
| MS1 | МС2 | МС3 | Разрешение микрошага |
|---|---|---|---|
| Низкий | Низкий | Низкий | Полный шаг |
| Высокий | Низкий | Низкий | Полушаг |
| Низкий | Высокий | Низкий | Четверть шага |
| Высокий | Высокий | Низкий | Восьмой шаг |
| Высокий | Высокий | Высокий | Шестнадцатый шаг |
Входы управления
Каждый импульс на вход STEP соответствует одному микрошагу шагового двигателя в направлении, выбранном выводом DIR. Обратите внимание, что выводы STEP и DIR не подключены к какому-либо определенному внутреннему напряжению, поэтому вы не должны оставлять ни один из этих выводов плавающим в своем приложении.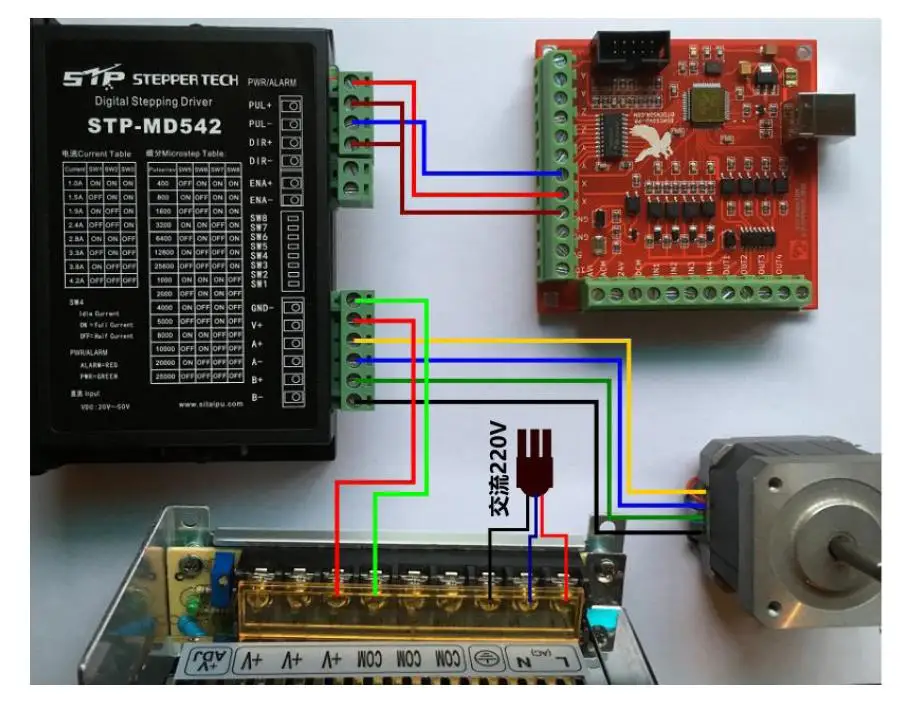 Если вам просто нужно вращение в одном направлении, вы можете напрямую связать DIR с VCC или GND. Микросхема имеет три различных входа для управления многочисленными состояниями питания: RST, SLP и EN. Дополнительные сведения об этих состояниях питания см. в техническом описании. Обратите внимание, что контакт RST является плавающим; если вы не используете контакт, вы можете подключить его к соседнему контакту SLP на печатной плате, чтобы перевести его в высокий уровень и включить плату.
Если вам просто нужно вращение в одном направлении, вы можете напрямую связать DIR с VCC или GND. Микросхема имеет три различных входа для управления многочисленными состояниями питания: RST, SLP и EN. Дополнительные сведения об этих состояниях питания см. в техническом описании. Обратите внимание, что контакт RST является плавающим; если вы не используете контакт, вы можете подключить его к соседнему контакту SLP на печатной плате, чтобы перевести его в высокий уровень и включить плату.
Ограничение тока
Одним из способов максимизировать производительность шагового двигателя является использование максимально возможного для вашего приложения напряжения. В частности, увеличение напряжения обычно позволяет увеличить скорость шага и вращающий момент шага, поскольку ток в катушках может изменяться быстрее после каждого шага. Однако, чтобы безопасно использовать напряжения выше номинального напряжения шагового двигателя, ток катушки должен активно ограничиваться, чтобы не допустить превышения номинального тока двигателя.
A4988 поддерживает такое активное ограничение тока, а подстроечный потенциометр на плате можно использовать для установки ограничения тока. Одним из способов установки ограничения тока является перевод драйвера в полношаговый режим и измерение тока, протекающего через одну катушку двигателя, при регулировке потенциометра ограничения тока. Это должно быть сделано с двигателем, удерживающим фиксированное положение (т. е. без тактирования входа STEP). Обратите внимание, , что измеряемый ток составляет всего 70% от фактической настройки ограничения тока , так как обе катушки всегда включены и ограничены этим значением в полношаговом режиме, поэтому, если вы позже включите микрошаговые режимы, ток через катушки сможет превысить этот измеренный полношаговый ток на 40% (1/0,7 ) на определенных шагах; пожалуйста, примите это во внимание при использовании этого метода для установки ограничения тока. Также обратите внимание, что вам нужно будет выполнить эту регулировку снова, если вы когда-либо изменяли логическое напряжение, Vdd, так как опорное напряжение, которое устанавливает ограничение тока, является функцией Vdd.
Примечание: Ток катушки может сильно отличаться от тока источника питания, поэтому не следует использовать ток, измеренный на источнике питания, для установки ограничения тока. Подходящим местом для установки вашего амперметра является последовательное соединение с одной из катушек вашего шагового двигателя.
Другой способ установить ограничение тока — рассчитать опорное напряжение, соответствующее желаемому ограничению тока, а затем отрегулировать потенциометр ограничения тока до тех пор, пока не будет измерено это напряжение на
.0085 VREF пин. Напряжение на выводе VREF доступно через переходное отверстие, обведенное кружком в нижней части печатной платы. Ограничение тока, I MAX , относится к эталонному напряжению следующим образом:
«I_(MAX) = (V_(REF)) / (8 * R_(CS))«
или, переставленное для решения для VREF:
«V_(REF) = 8 * I_(MAX) * R_(CS)«
R CS сопротивление измерения тока; в оригинальных версиях этой платы использовались резисторы 0,050 Ом , но мы переключились на использование 9 резисторов. 0085 0,068 Ом токоизмерительных резисторов в январе 2017 года, что делает более полезным диапазон регулировки потенциометра. На следующем рисунке показано, как определить, какие токоизмерительные резисторы установлены на вашей плате:
| Идентификация оригинальных измерительных резисторов 50 мОм (слева) и 68 мОм (справа), представленных в январе 2017 г. |
|---|
Так, например, если вы хотите установить ограничение тока на 1 А и у вас есть плата с резисторами 68 мОм, вы должны установить VREF на 540 мВ. Это гарантирует, что, даже если ток через каждую катушку меняется от шага к шагу, величина вектора тока в шаговом двигателе остается постоянной на уровне 1 А: 92) = I_(MAX) = 1 text (A)«
Если вместо этого вы хотите, чтобы ток через для каждой катушки составлял 1 А в полношаговом режиме, вам нужно установить ограничение тока на 40 %. выше, или 1,4 А, поскольку катушки ограничены примерно 70 % от установленного предельного тока в полношаговом режиме (приведенное выше уравнение показывает, почему это так). Чтобы сделать это с платой с чувствительными резисторами 68 мОм, вы должны установить VREF на 770 мВ.
Соображения по рассеиваемой мощности
ИС драйвера A4988 имеет максимальный номинальный ток 2 А на катушку, но фактический ток, который вы можете обеспечить, зависит от того, насколько хорошо вы можете поддерживать охлаждение ИС. Печатная плата носителя предназначена для отвода тепла от ИС, но для подачи более приблизительно 1,2 А на катушку требуется радиатор или другой метод охлаждения (в наших тестах мы смогли обеспечить примерно 1,4 А на катушку). с потоком воздуха от вентилятора ПК и без радиатора).
Этот продукт может нагреть до такой степени, что обожжет вас задолго до того, как чип перегреется. Будьте осторожны при обращении с этим продуктом и другими компонентами, связанными с ним.
Обратите внимание, что измерение потребляемого тока в источнике питания, как правило, не обеспечивает точного измерения тока катушки. Поскольку входное напряжение драйвера может быть значительно выше, чем напряжение катушки, измеренный ток источника питания может быть немного ниже, чем ток катушки (драйвер и катушка в основном действуют как импульсный понижающий источник питания).
