Что такое двигатель постоянного тока для Arduino. Какие бывают типы DC-моторов. Как подключить двигатель к Arduino. Как управлять скоростью и направлением вращения DC-мотора с помощью Arduino. Какие драйверы использовать для подключения мощных двигателей.
Основные типы двигателей постоянного тока для Arduino
Двигатели постоянного тока (DC-моторы) — одни из самых распространенных электромеханических устройств, используемых в проектах с Arduino. Они позволяют создавать подвижные конструкции, роботов и другие интересные устройства. Рассмотрим основные типы DC-моторов, которые можно подключить к Arduino:
- Коллекторные двигатели — классические DC-моторы с щетками и коллектором. Простые и недорогие, но требуют обслуживания.
- Бесколлекторные двигатели — более эффективные и долговечные, но требуют специальных контроллеров.
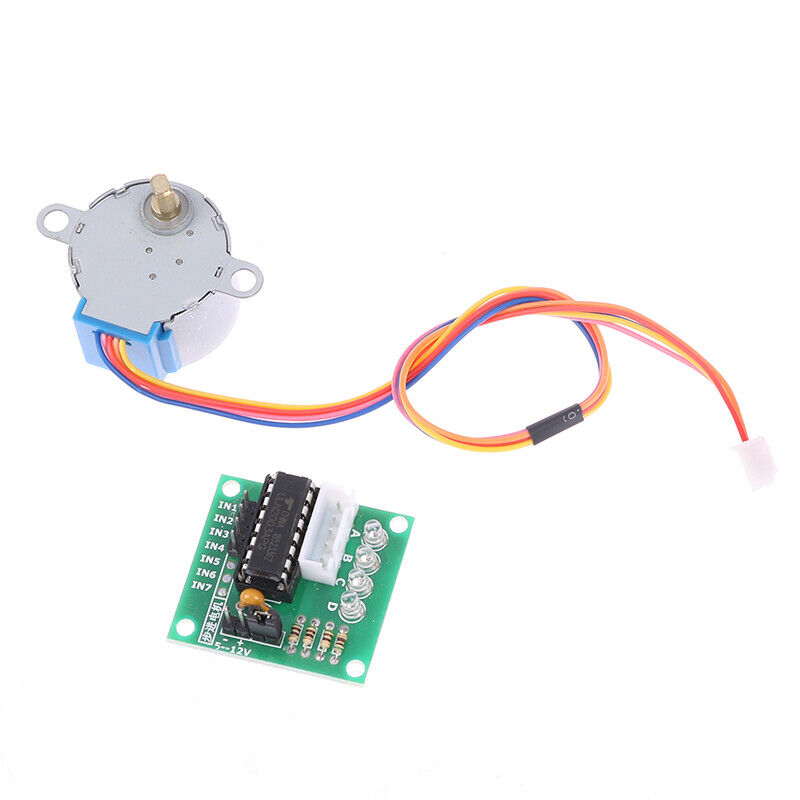
- Шаговые двигатели — позволяют точно контролировать положение вала.
- Серводвигатели — имеют встроенную систему позиционирования.
Как подключить двигатель постоянного тока к Arduino

- Через транзисторный ключ — простейший вариант для маломощных моторов.
- С помощью H-моста — позволяет управлять направлением вращения.
- Через специализированный драйвер — обеспечивает защиту и дополнительные функции.
Управление скоростью DC-мотора с помощью Arduino
Для регулировки скорости вращения двигателя постоянного тока используется широтно-импульсная модуляция (ШИМ). Arduino позволяет формировать ШИМ-сигнал с помощью функции analogWrite(). Алгоритм управления скоростью:
- Подключите двигатель через драйвер к ШИМ-пину Arduino.
- Установите режим пина на OUTPUT: pinMode(motorPin, OUTPUT);
- Задайте скорость функцией analogWrite(motorPin, speed), где speed — значение от 0 до 255.
Изменение направления вращения двигателя
Для реверса DC-мотора необходимо изменить полярность подаваемого на него напряжения. Это можно реализовать с помощью H-моста или специального драйвера. Алгоритм управления направлением:
- Подключите двигатель к драйверу с H-мостом.
- Используйте два цифровых выхода Arduino для управления направлением.
- Устанавливая высокий уровень на одном выходе и низкий на другом, задавайте нужное направление.
Популярные драйверы двигателей для Arduino
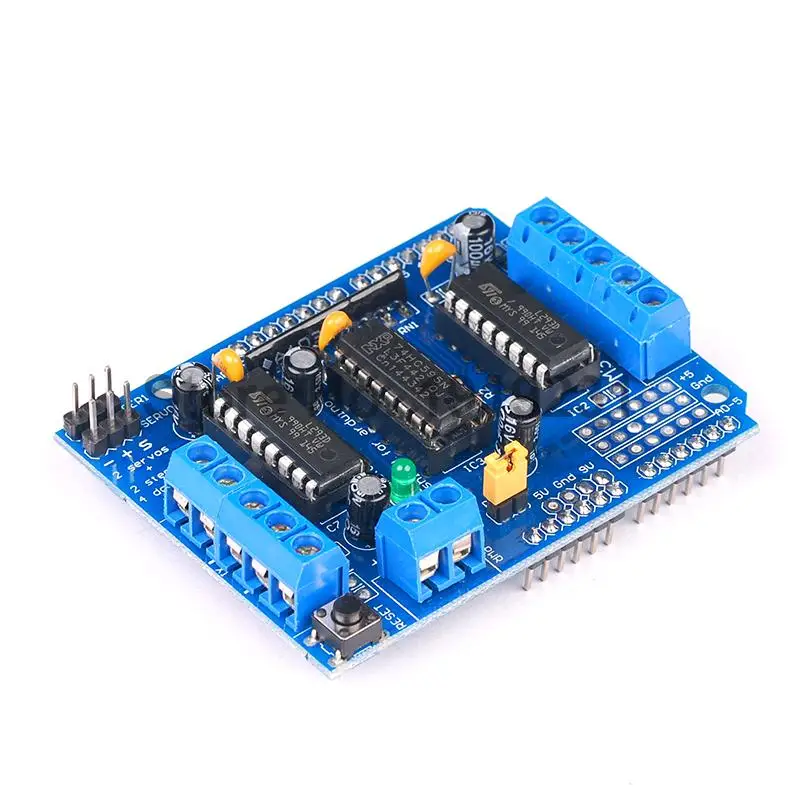
Для подключения мощных DC-моторов рекомендуется использовать специализированные драйверы. Они обеспечивают защиту Arduino и расширенное управление двигателями. Популярные модели драйверов:

- L298N — универсальный драйвер для управления двумя DC-моторами.
- L293D — компактный драйвер с возможностью ШИМ-управления.
- DRV8833 — низковольтный драйвер с защитой от перегрузки.
- TB6612FNG — драйвер с низким энергопотреблением для портативных устройств.
Программирование DC-мотора на Arduino
Рассмотрим пример программы для управления скоростью и направлением вращения двигателя постоянного тока с помощью Arduino:
«`cpp const int motorPin = 3; // ШИМ-пин для управления скоростью const int dirPin1 = 4; // Пин управления направлением 1 const int dirPin2 = 5; // Пин управления направлением 2 void setup() { pinMode(motorPin, OUTPUT); pinMode(dirPin1, OUTPUT); pinMode(dirPin2, OUTPUT); } void loop() { // Вращение вперед digitalWrite(dirPin1, HIGH); digitalWrite(dirPin2, LOW); // Плавное увеличение скорости for (int speed = 0; speed <= 255; speed++) { analogWrite(motorPin, speed); delay(20); } delay(1000); // Плавное уменьшение скорости for (int speed = 255; speed >= 0; speed—) { analogWrite(motorPin, speed); delay(20); } delay(1000); // Вращение назад digitalWrite(dirPin1, LOW); digitalWrite(dirPin2, HIGH); // Установка средней скорости analogWrite(motorPin, 128); delay(2000); // Остановка двигателя analogWrite(motorPin, 0); delay(1000); } «` Этот код демонстрирует основные приемы управления DC-мотором: изменение скорости с помощью ШИМ и переключение направления вращения. Вы можете модифицировать его под свои задачи, добавляя новые функции или изменяя параметры управления.
Применение DC-моторов в проектах Arduino
Двигатели постоянного тока широко используются в различных проектах на базе Arduino. Вот несколько популярных примеров применения:
- Робототехника — создание подвижных роботов и манипуляторов.
- Умный дом — автоматизация штор, жалюзи, дверей.
- Моделизм — управление моделями машин, кораблей, самолетов.
- Автоматизация — создание конвейеров, сортировщиков, подающих механизмов.
Особенности выбора DC-мотора для проекта Arduino
При выборе двигателя постоянного тока для вашего проекта на Arduino следует учитывать несколько ключевых параметров:
- Напряжение питания — должно соответствовать вашему источнику питания.
- Потребляемый ток — не должен превышать возможности вашего драйвера.
- Крутящий момент — должен быть достаточным для вашей задачи.
- Скорость вращения — выбирается исходя из требований проекта.
- Размер и вес — важны для компактных и мобильных устройств.
Правильный выбор двигателя обеспечит эффективную работу вашего устройства и поможет избежать проблем с перегрузкой или недостаточной мощностью.
Защита Arduino и DC-мотора при совместной работе
При использовании двигателей постоянного тока с Arduino важно обеспечить защиту как самого микроконтроллера, так и мотора. Рассмотрим основные меры безопасности:
- Используйте отдельный источник питания для двигателя, не подключайте его напрямую к Arduino.
- Применяйте защитные диоды для предотвращения обратных токов при остановке двигателя.
- Используйте конденсаторы для сглаживания пульсаций напряжения питания.
- Обеспечьте хорошее заземление для уменьшения электромагнитных помех.
- При работе с высокими токами используйте радиаторы для охлаждения драйверов.
Соблюдение этих мер поможет продлить срок службы вашего оборудования и обеспечит стабильную работу проекта.
Проекты с использованием шавого двигателя
На главную
Обзор программ
Обзор плат
Проекты на базе:
Arduino Nano
Arduino Uno
Arduino Pro Micro
Arduino Mega
Digispark
Проекты с использованием:
Потенциометр
Джойстик
Кнопка
Реле
RGB
Дисплей
SD карта
Электрон.
 ключ
ключ
Энкодер
Сдвиг. регистор
Д. температуры
Д. влажности
Д. растояния
Д. газа
Батарея
Средства связи:
Bluetooth
Android
GSM
USB
I2C (TWI)
SPI ICSP
UART
One Wire
Парал.
 интерфейс
интерфейс
Двигатели:
Шаговый мотор
Постоянного тока
Servo
Еще:
О нас
Oбъявление
Обратная связь
YouTube канал
Проекты с использованием шавого двигателя
Регулятор скорости вращения для униполярного шагового двигателя на базе Arduino UNO
Пошаговая инструкция о том как своими руками собрать регулятор скорости вращения для униполярного шагового двигателя.
А именно о том как собрать электронную часть, как загрузить прошивку в управляющий микроконтроллер, как запустить все в работу и что для всего этого понадобится…
Открыть полностью
Регулятор скорости вращения для биполярного шагового двигателя на базе Arduino Nano
Самодельный димер на базе платы Arduino Nano и драйвера DRV8825
Два варианта управления биполярным шаговым двигателем, с кнопками для пуска и смены направления вращения.
Открыть полностью
Привод для жалюзи на базе Arduino UNO и шаговых двигателях 28BYJ-48 5V
Как собрать привод для жалюзи, на базе Arduino UNO и двух шаговых двигателях 28BYJ-48 5V.
К данной статье прилагаются два готовых скетча…
Открыть полностью
Управление двумя шаговыми двигателями с помощью джойстика на базе Arduino UNO.
Статья о том, из чего и как своими руками собрать привод на базе Arduino UNO, джойстика и двух униполярных шаговых двигателях 28BYJ-48 5V
Имеется схема и скетч, работающий без библиотек.
Открыть полностью
Автоматическая фокусировка на Arduino и Digispark с датчиком расстояния VL53L0X и драйвером DRW8825.
Статья, содержащая материалы для изучения и сборки двух вариантов привода, для автоматической фокусировки микроскопа, на Arduino UNO и Digispark
Как объединить две платы Arduino и Digispark, для совместной работы над общей задачей.
Как подключить биполярный шаговый двигатель к Arduino Uno и к Digispark…
Открыть полностью
Управление двумя униполярными шаговыми моторами по Bluetooth.
Статья о том, как своими руками собрать беспроводное управление, для двух униполярных шаговых моторов 28BYJ-48 5V.
В качестве пульта подойдет любой ANDROID телефон с наличием Bluetooth.
Открыть полностью
Лучший эмулятор Arduino UnoArduSim V2.6. Первая серия.
Набор из 9 простых скетчей, которые использовались в этой серии.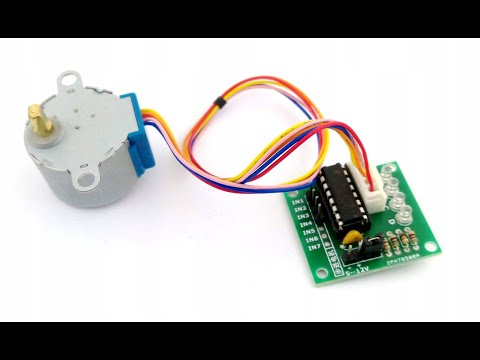
В этой серии рассмотрены принципы работы таких модулей как: светодиод, кнопка, потенциометр, Serial порт, программный Serial порт, 4 фазный шаговый двигатель, 2 фазный шаговый двигатель и DC Motor.
Открыть полностью
Регулятор скорости вращения для униполярного шагового двигателя на базе Didgispark
Простой и не дорогой, регулятор скорости вращения, для униполярного шагового двигателя.
В статье есть перечень материалов, скетч, схема для сборки, и видео инструкция.
Открыть полностью
Arduino управление шаговыми двигателями по Bluetooth при помощи Android смартфона
Статья о том как написать код для электрического привода, для слайдера под видеокамеру, с управлением по Bluetooth, на базе Arduino Nano, драйверов DRV8825 и Bluetooth модуля HC-05.
Открыть полностью
Управление биполярным шаговым двигателем при помощи инкрементального энкодера
Статья о том как подключить инкрементальный энкодер EC11 к Arduino, как управлять биполярным шаговым двигателем при помощи энкодера, как проверить инкрементный энкодер, как подключить драйвер шагового двигателя drw8825 к Arduino.
Открыть полностью
Плавный пуск и остановка биполярного шагового двигателя. Спец драйвер на Digispark Attiny85.
Статья о том, как организовать плавный пуск биполярного шагового двигателя, путём совмещения драйвера шагового двигателя с платой Didispark Attiny85, которая выступает в роли посредника между платой Arduino и драйвером шагового двигателя A4988 или DRW8825
Открыть полностью
ЧПУ станок для намотки трансформаторов на Arduino и Digispark.

Инструкция по управлению ЧПУ станком для намотки трансформаторов на Arduino.
А также материалы, для самостоятельной сборки ЧПУ станка, для намотки трансформаторов на Arduino.
Открыть полностью
ЧПУ станок для намотки трансформаторов с укладчиком провода, и автоматическим натяжением провода на Arduino и Digispark.
Материалы, для самостоятельной сборки ЧПУ станка для намотки трансформаторов на Arduino, с укладчиком провода, и с автоматическим натяжением провода.
А также инструкция, по управлению ЧПУ станком, для намотки трансформаторов на Arduino и Digispark.
Открыть полностью
Двигатели, моторы и детали для машин Arduino
Фильтры
Хиты продаж
Цена товара
Р – Р
- 50Р
- 1140Р
Бренд
-
- iSmart
По этим критериям поиска ничего не найдено
Наши магазины
Адлер
Астрахань
Волгоград
Волжский
Воронеж
Екатеринбург
Иваново
Ижевск
Казань
Кемерово
Кострома
Краснодар
Красноярск
Москва
Набережные Челны
Нижний Новгород
верхняя — нижняя-
Новокузнецк
Новосибирск
Омск
Пенза
Пермь
Похвистнево
Ростов-на-Дону
Рязань
Самара
Санкт-Петербург
Саратов
Смоленск
Ставрополь
Стерлитамак
Сызрань
Тольятти
Тюмень
Уфа
Чебоксары
Челябинск
Череповец
Ярославль
В городе действует бесплатная курьерская доставка при покупке на сумму от 1 000 р.
В городе действует бесплатная курьерская доставка при покупке на сумму от 500 р.
В магазине есть платная доставка транспортной компанией по всей Российской Федерации.
В городе магазина ‘ПРОФИ’ пока нет, но есть пункт выдачи заказов.
Использование MATLAB и Arduino для управления двигателем — видео
В этой демонстрации мы увидим, как управлять двигателями с помощью пакета поддержки MATLAB для Arduino. Что касается программного обеспечения, у меня есть MATLAB и пакет поддержки MATLAB для Arduino, предварительно установленные на моей машине. Если у вас не установлен пакет поддержки, вы можете перейти на вкладку надстроек и нажать «Получить пакеты поддержки оборудования», чтобы загрузить и установить пакет поддержки. Что касается оборудования, у меня есть Arduino Due, Motor Party Pack для Arduino, аккумулятор постоянного тока и кабель USB Micro-b.
Чтобы следовать этой демонстрации и выполнить соединения, которые у меня есть, подключите штырек Servo 1 на Motor Shield к серводвигателю. И один контакт к двигателю постоянного тока, а контакты M3 и M4 к шаговому двигателю. Важно отметить, что аккумуляторная батарея постоянного тока необходима для управления двигателем постоянного тока и шаговым двигателем. Подключите аккумуляторную батарею постоянного тока к контакту питания. Конец Micro-b кабеля должен быть подключен к порту программирования на Due, а конец USB — к ПК, на котором установлен MATLAB. Для получения более подробной инструкции о том, как выполнить подключение, перейдите по этой ссылке.
Теперь, когда мы сделали все необходимые соединения, давайте перейдем к MATLAB и посмотрим, как мы можем управлять двигателями. Для этого я написал скрипт, который собираюсь показать. Функция Arduino в этом скрипте устанавливает соединение с Due, который отключился от COM-порта, упомянутого в первом вводе. Эта функция также предоставляет MATLAB инструкции по библиотекам, которые необходимо включить в серверный код Arduino. Когда я выполняю это в командном окне MATLAB, MATLAB создает объект, представляющий физический объект, к которому он подключен.
Когда я выполняю это в командном окне MATLAB, MATLAB создает объект, представляющий физический объект, к которому он подключен.
После этого дополнительная функция может работать с объектом, созданным для подключения к Motor Shield. Выполнение команды в окне команд и запуск скрипта MATLAB имеют тот же эффект. Так что в оставшейся части этого видео я буду использовать кнопку для перехода к следующему разделу кода после выполнения текущего раздела.
MATLAB создает новый объект в рабочей области каждый раз, когда он подключается к новому физическому объекту. В данном случае Моторный Щит. Здесь, в этом разделе кода, мы должны обратить внимание на функции сервопривода и правильного положения. Функция сервопривода позволяет вам обмениваться данными из MATLAB с серводвигателем, который подключен к номеру порта, указанному во втором входе. Функция правильного положения позволяет вам дать команду серводвигателю переместиться в указанное положение. Здесь я использую 4 цикла для перемещения двигателя от 0 до 180 градусов пять раз назад и вперед. Я прикрепил здесь изображение колеса к серводвигателю, чтобы показать его в действии.
Я прикрепил здесь изображение колеса к серводвигателю, чтобы показать его в действии.
В следующем разделе Cord функция «Шаговый двигатель» помогает нам установить соединение с шаговым двигателем, подключенным к порту 2. Третий вход этой функции определяет количество шагов, которые шаговый двигатель должен делать за каждый оборот. Функция Move дает команду шаговому двигателю переместиться на количество шагов, указанное во втором входе. Давайте посмотрим, сможет ли MATLAB заставить балерину танцевать под свои мелодии.
Для связи с последним типом двигателя, поставляемым вместе с пакетом Motor Party Pack от MATLAB, можно использовать функцию двигателя постоянного тока. Комментарий остановки и запуска делает именно то, что следует из названия. Помните, что эти функции можно использовать только после указания скорости двигателя. Скорость двигателя должна быть указана в процентах от максимальной скорости двигателя. Гипнотизирующий диск здесь показывает работу двигателя постоянного тока.
Итак, мы увидели, как управлять двигателями с помощью MATLAB и пакета поддержки для Arduino.
Сопутствующие товары
- MATLAB
Узнать больше
Загрузить пакет поддержки MATLAB для Arduino
Pololu Dual G2 High-Power Motor Driver Shield 18v18 для Arduino
Обзор
предназначен для привода двух больших коллекторных двигателей постоянного тока. Они имеют форм-фактор платы Arduino, поэтому их можно подключать непосредственно к Arduino или совместимой плате, такой как A-Star 32U4 Prime, но они также выламывают все контакты драйвера двигателя вдоль левой стороны платы, чтобы включить использование в качестве драйвера двигателя общего назначения без Arduino. Доступны четыре версии, так что вы можете выбрать ту, которая соответствует диапазону рабочего напряжения и возможностям выходного тока для вашего проекта:
| Dual G2 High- Драйвер силового двигателя Экран 18v22 |
Dual G2 High- Драйвер силового двигателя Экран 18v18 |
Dual G2 High- Драйвер силового двигателя Экран 24v18 |
Dual G2 High- Драйвер силового двигателя Экран 24v14 |
|
|---|---|---|---|---|
Абсолютное макс.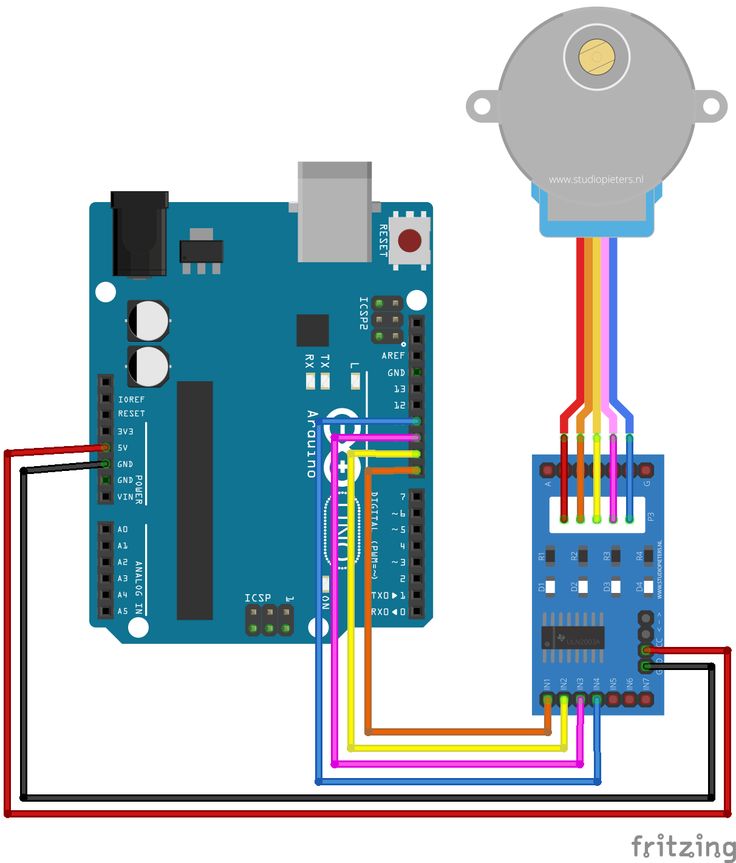 входное напряжение: |
30 В | 40 В | ||
| Максимальное номинальное напряжение батареи : |
18 В | 28 В | ||
| Макс. непрерывный ток на канал: |
22 А | 18 А | 18 А | 14 А |
| Активный ток по умолчанию — порог ограничения : |
60 А | 50 А | 40 А | |
| Датчик тока выход: |
10 мВ/А | 20 мВ/А | ||
Минимальное рабочее напряжение для всех четырех версий составляет 6,5 В. Максимальное рабочее напряжение указано в таблице выше; они намного выше того, что может выдержать типичный Arduino, поэтому экраны включают в себя встроенный импульсный понижающий регулятор 7,5 В, 1 А, который можно дополнительно использовать для питания любой Arduino или платы, совместимой с Arduino, к которой он подключен, что позволяет работать с одного источник питания. Этот регулятор также можно настроить на выход 5 В для приложений, где это будет более полезно, чем 7,5 В по умолчанию, а сопоставления выводов Arduino можно настроить, если значения по умолчанию неудобны.
Этот регулятор также можно настроить на выход 5 В для приложений, где это будет более полезно, чем 7,5 В по умолчанию, а сопоставления выводов Arduino можно настроить, если значения по умолчанию неудобны.
Эти драйверы с двумя двигателями также доступны в виде плат расширения Raspberry Pi. Для одноканальных версий в более компактном форм-факторе рассмотрите наши драйверы двигателей высокой мощности. В качестве менее мощной и недорогой альтернативы Arduino Shield рассмотрите Dual MC33926 Motor Driver Shield.
Детали для товара № 2515
|
|
|

- Рабочее напряжение: от 6,5 В до 30 В (абсолютный максимум; не предназначен для использования с батареями 24 В)
- Выходной ток: 18 А, непрерывный
- Выход датчика тока, пропорциональный току двигателя (прибл. 20 мВ/А; активен только при работе H-моста)
- Активное ограничение тока (прерывание) с приблизительным порогом по умолчанию 50 А (можно уменьшить)
Эту версию, щит драйвера двигателя 18v18 , можно отличить от других версий по синей плате и номеру 150 поверх высоких серебряных электролитических конденсаторов.
Особенности, общие для всех версий
| Pololu Dual G2 High Power Motor Driver Shield, управляемый A-Star 32U4 Prime. |
|---|
- Входы, совместимые с логикой 1,8 В, 3,3 В и 5 В
- Режим ШИМ до 100 кГц
- Светодиодные индикаторы двигателя показывают, что делают выходы, даже если двигатель не подключен
- Защита от обратного напряжения
- Отключение при пониженном напряжении
- Защита от короткого замыкания
- Интерфейс управления допускает работу со знаком или заблокированной противофазой
- Встроенный импульсный понижающий стабилизатор напряжения 7,5 В, 1 А (вместо этого можно настроить на выход 5 В)
- Библиотека Arduino упрощает начало работы с этой платой в качестве защитного экрана драйвера двигателя
- Подробное руководство пользователя
- Сопоставление выводов Arduino можно настроить, если сопоставления по умолчанию неудобны
- При использовании в качестве экрана источник питания двигателя или выход регулятора 7,5 В можно дополнительно использовать для питания базы Arduino для работы с однополярным питанием
- Может использоваться с платой Arduino или совместимой платой (через щитовые разъемы) или другими платами микроконтроллеров (через 0,1-дюймовый разъем вдоль левой стороны)
|
|
Оборудование в комплекте
| Мощный драйвер двигателя Pololu Dual G2 18v18 Shield для Arduino с включенным оборудованием. |
|---|
| Для сильноточных установок провода двигателя и питания следует припаивать непосредственно к приводу (поставляемые клеммные колодки рассчитаны только на ток до 16 А). |
|---|
Эта плата драйвера двигателя поставляется со всеми установленными деталями для поверхностного монтажа. Однако для сборки входящих в комплект деталей со сквозными отверстиями требуется пайка. В комплект входят следующие детали со сквозными отверстиями:
- один удлиненный/штабелируемый разъем 1×10 «мама» (для плат Arduino)
- два удлиненных/штабелируемых гнездовых разъема 1×8 (для плат Arduino)
- два удлиненных/штабелируемых гнездовых разъема 1×6 (для плат Arduino)
- три 2-контактных 5-мм клеммных блока (для питания платы и выходов двигателя)
- 40-контактный прямой разъемный штекерный разъем 0,1″ (может поставляться в виде нескольких частей, например, двух 20-контактных полос)
В комплект также входит блок короткого замыкания 0,1″ (для дополнительной подачи питания на Arduino).
Вы можете припаять клеммные колодки к шести большим сквозным отверстиям, чтобы подключить двигатель и питание двигателя, или вы можете отломить секцию 1 × 12 0,1-дюймовой контактной полосы и припаять ее к меньшим сквозным отверстиям, которые границы этих больших отверстий. Обратите внимание, однако, что клеммные колодки рассчитаны только на 16 А, а каждая пара штыревых контактов рассчитана только на суммарный ток 6 А, поэтому для приложений с большей мощностью толстые провода следует припаивать непосредственно к плате, а соответствующие высоковольтные следует использовать токовые разъемы (такие как эти).
Если эта плата не используется в качестве экрана Arduino, вы можете припаять 0,1-дюймовые разъемы к логическим соединениям вдоль левой стороны платы, чтобы можно было использовать специальные кабели или макетные платы без пайки, или вы можете припаять провода непосредственно к плате для более компактные установки. Обратите внимание, что соединения двигателя и питания двигателя не должны выполняться через макетную плату.
Драйвер двигателя включает шесть электролитических силовых конденсаторов емкостью 100 мкФ или 150 мкФ, и есть место для добавления дополнительных конденсаторов (например, для компенсации длинных проводов питания или повышения стабильности источника питания). Дополнительные силовые конденсаторы обычно не требуются, и в этот драйвер двигателя дополнительные конденсаторы не входят.
Два монтажных отверстия предназначены для использования с винтами № 4 (не входят в комплект).
Измерение и ограничение тока
Контакты датчика тока драйвера, M1CS и M2CS, выходные напряжения пропорциональны току двигателя во время работы Н-моста. Выходное напряжение составляет около 10 мВ/А для версии 18v22 и 20 мВ/А для других версий плюс небольшое смещение, которое обычно составляет около 50 мВ.
Драйвер имеет возможность ограничивать ток двигателя посредством прерывания тока: как только ток привода двигателя достигает установленного порога, драйвер переходит в режим торможения (медленное затухание) примерно на 25 мкс, прежде чем снова подать питание на двигатель. Это делает более практичным использование драйвера с двигателем, который может потреблять всего несколько ампер во время работы, но может потреблять во много раз больше (десятки ампер) при запуске. Вы можете снизить порог ограничения тока по умолчанию, подключив дополнительный резистор между контактом VREF и соседним контактом GND.
Это делает более практичным использование драйвера с двигателем, который может потреблять всего несколько ампер во время работы, но может потреблять во много раз больше (десятки ампер) при запуске. Вы можете снизить порог ограничения тока по умолчанию, подключив дополнительный резистор между контактом VREF и соседним контактом GND.
Дополнительные сведения об обратной связи по току и ограничении тока см. в руководстве пользователя.
Рассеиваемая мощность в реальных условиях
Полевые МОП-транзисторы могут выдерживать кратковременные кратковременные пики тока (например, 100 А в течение нескольких миллисекунд), а прерывание тока драйвером будет удерживать средний ток ниже установленного предела. Пиковые значения предназначены для быстрых переходных процессов (например, при первом включении двигателя), а непрерывные значения зависят от различных условий, таких как температура окружающей среды. ШИМ двигателя вносит дополнительный нагрев, пропорциональный частоте. Фактический ток, который вы можете подать, будет зависеть от того, насколько хорошо вы сможете охлаждать драйвер двигателя. Печатная плата драйвера предназначена для отвода тепла от МОП-транзисторов, но производительность можно улучшить, добавив радиатор или поток воздуха. Для сильноточных установок провода двигателя и питания также следует припаивать напрямую, а не через прилагаемые клеммные колодки, которые рассчитаны на ток до 16 А.
Печатная плата драйвера предназначена для отвода тепла от МОП-транзисторов, но производительность можно улучшить, добавив радиатор или поток воздуха. Для сильноточных установок провода двигателя и питания также следует припаивать напрямую, а не через прилагаемые клеммные колодки, которые рассчитаны на ток до 16 А.
Предупреждение: Этот привод двигателя не имеет функции отключения при перегреве. Перегрев или перегрузка по току могут привести к необратимому повреждению привода двигателя. Вы можете рассмотреть возможность использования либо встроенного выхода датчика тока драйвера, либо внешнего датчика тока для контроля потребляемого тока.
Этот продукт может нагреть до температуры, достаточной для горения при нормальных условиях эксплуатации. Будьте осторожны при обращении с этим продуктом и другими компонентами, связанными с ним.
Версии драйверов мощных двигателей G2
Существует четыре версии одноканальных драйверов двигателей большой мощности G2 с совместимой разводкой выводов и восемь версий двухканальных драйверов двигателей большой мощности G2. Четыре двухканальных драйвера имеют форм-фактор платы Arduino, но их также можно использовать с другими контроллерами в качестве драйверов двигателей общего назначения. Остальные четыре двухканальных драйвера имеют форм-фактор Raspberry Pi HAT и совместимых плат Raspberry Pi (модель B+ или новее). В следующей таблице представлено сравнение драйверов G2:
Четыре двухканальных драйвера имеют форм-фактор платы Arduino, но их также можно использовать с другими контроллерами в качестве драйверов двигателей общего назначения. Остальные четыре двухканальных драйвера имеют форм-фактор Raspberry Pi HAT и совместимых плат Raspberry Pi (модель B+ или новее). В следующей таблице представлено сравнение драйверов G2:
| Драйверы мощных двигателей Pololu G2 | |||||
|---|---|---|---|---|---|
| Двигатель канала |
Имя | Абсолютное максимальное входное напряжение |
Максимальное номинальное напряжение батареи |
Макс. непрерывный ток на канал |
По умолчанию активен ограничение тока порог |
| 1 | Драйвер двигателя высокой мощности G2 18v25 | 30 В | 18 В | 25 А | 60 А |
| Мощный драйвер двигателя G2 18v17 | 17 А | 40 А | |||
| Драйвер двигателя высокой мощности G2 24v21 | 40 В | 28 В | 21 А | 50 А | |
| Мощный драйвер двигателя G2 24v13 | 13 А | 30 А | |||
| 2 | Мощный драйвер двигателя Dual G2 18v22 Shield | 30 В | 18 В | 22 А | 60 А |
| Мощный драйвер двигателя Dual G2 18v18 Shield | 18 А | 50 А | |||
| Мощный драйвер двигателя Dual G2 24v18 Shield | 40 В | 28 В | 18 А | 50 А | |
| Мощный драйвер двигателя Dual G2 24v14 Shield | 14 А | 40 А | |||
| Мощный драйвер двигателя Dual G2 18v22 для RPi | 30 В | 18 В | 22 А | 60 А | |
| Мощный драйвер двигателя Dual G2 18v18 для RPi | 18 А | 50 А | |||
| Мощный драйвер двигателя Dual G2 24v18 для RPi | 40 В | 28 В | 18 А | 50 А | |
| Мощный драйвер двигателя Dual G2 24v14 для RPi | 14 А | 40 А | |||
| Мощный драйвер двигателя Pololu G2 24v21 и 24v13. |
|---|

|
|
|
|
Примечание: В качестве альтернативы этим драйверам двигателей наши простые контроллеры двигателей имеют аналогичные характеристики мощности и предлагают высокоуровневые интерфейсы (например, USB, радиоимпульсы сервопривода для хобби, аналоговые напряжения и последовательные команды TTL), которые упрощают их использование.
