Как устроен двигатель постоянного тока. Какие основные компоненты входят в его конструкцию. На каком принципе основана его работа. Где применяются двигатели постоянного тока в современной технике. Каковы их преимущества и недостатки.
Устройство двигателя постоянного тока
Двигатель постоянного тока (ДПТ) состоит из следующих основных частей:
- Статор — неподвижная часть двигателя, создающая основное магнитное поле
- Ротор (якорь) — вращающаяся часть, в которой индуцируется ЭДС
- Коллектор — устройство для преобразования переменного тока якоря в постоянный во внешней цепи
- Щетки — обеспечивают электрический контакт между коллектором и внешней цепью
- Подшипниковые щиты — для крепления подшипников вала ротора
Статор ДПТ выполняется в виде стального корпуса с полюсами, на которых размещены обмотки возбуждения. Ротор представляет собой цилиндр, набранный из листов электротехнической стали, с обмоткой из медного провода. Коллектор состоит из медных пластин, изолированных друг от друга.

Принцип работы двигателя постоянного тока
Принцип действия ДПТ основан на взаимодействии магнитного поля статора и тока, протекающего по обмотке ротора. При подаче напряжения на обмотку возбуждения статора создается магнитное поле. При пропускании тока через обмотку якоря возникает электромагнитная сила, действующая на проводники обмотки. Эта сила создает вращающий момент, приводящий ротор в движение.
Каким образом обеспечивается непрерывное вращение якоря? Коллектор и щетки выполняют роль механического преобразователя, который изменяет направление тока в обмотке якоря при его повороте. Это позволяет поддерживать постоянное направление вращающего момента.
Области применения двигателей постоянного тока
Несмотря на широкое распространение асинхронных двигателей, ДПТ до сих пор находят применение во многих отраслях:
- Электротранспорт (электровозы, трамваи, троллейбусы)
- Станкостроение (приводы подач и главного движения станков)
- Робототехника и автоматика
- Бытовая техника (электроинструмент, стартеры автомобилей)
- Подъемно-транспортные механизмы (лифты, краны)
Где используются двигатели постоянного тока сегодня? В электромобилях ДПТ применяются для привода колес. В промышленных роботах они обеспечивают точное позиционирование манипуляторов. В станках с ЧПУ двигатели постоянного тока отвечают за перемещение рабочих органов.

Преимущества и недостатки ДПТ
Основные достоинства двигателей постоянного тока:
- Высокий пусковой момент
- Широкий диапазон регулирования скорости
- Линейные механические характеристики
- Высокое быстродействие
К недостаткам можно отнести:
- Сложность конструкции коллекторного узла
- Искрение на коллекторе при работе
- Более высокая стоимость по сравнению с асинхронными двигателями
Способы регулирования скорости ДПТ
Для изменения частоты вращения двигателя постоянного тока применяются следующие способы:
- Изменение напряжения на якоре
- Введение добавочного сопротивления в цепь якоря
- Изменение магнитного потока возбуждения
Какой из этих способов наиболее эффективен? Регулирование изменением напряжения на якоре обеспечивает наибольший диапазон регулирования при высоком КПД во всем диапазоне скоростей. Однако он требует применения управляемого выпрямителя.
Системы возбуждения двигателей постоянного тока
По способу создания магнитного потока различают следующие системы возбуждения ДПТ:
- Независимое возбуждение — обмотка возбуждения питается от отдельного источника
- Параллельное возбуждение — обмотка возбуждения подключена параллельно якорю
- Последовательное возбуждение — обмотка возбуждения включена последовательно с якорем
- Смешанное возбуждение — комбинация параллельного и последовательного
Какая система возбуждения обеспечивает наилучшие характеристики? Двигатели с независимым возбуждением имеют наиболее жесткие механические характеристики и широкий диапазон регулирования скорости.
Перспективы развития двигателей постоянного тока
Несмотря на широкое распространение частотно-регулируемых асинхронных электроприводов, ДПТ продолжают совершенствоваться. Основные направления развития:
- Применение новых магнитных материалов для снижения массы и габаритов
- Использование полупроводниковых коммутаторов вместо щеточно-коллекторного узла
- Создание высокомоментных двигателей с возбуждением от постоянных магнитов
- Разработка интеллектуальных систем управления для повышения энергоэффективности
Таким образом, двигатели постоянного тока, несмотря на свой почтенный возраст, остаются востребованными во многих областях техники благодаря своим уникальным характеристикам. Дальнейшее совершенствование конструкции и систем управления позволит расширить сферу их применения.

Электродвигатели постоянного тока и области их применения | Полезные статьи
Электродвигатель постоянного тока (ДПТ) представляют собой механизм, преобразующий поступающую на него электрическую энергию в механическое вращение. Работа агрегата базируется на явлении электромагнитной индукции — на проводник, помещенный в магнитное поле, действует сила Ампера: F = B*I*L, где L — длина проводника, I — ток, протекающий по проводнику, B — индукция магнитного поля. Данная сила обуславливает возникновение крутящего момента, который может быть использован для неких практических целей.
Электродвигатели постоянного тока обладают следующими преимуществами:
- Практически линейные регулировочные и механические характеристики, благодаря чему обеспечивается удобство эксплуатации.
- Большая величина пускового момента.
- Компактные размеры (особенно сильно выражено у двигателей на постоянных магнитах).
- Возможность использования одного и того же механизма как в режиме двигателя, так и генератора.
- КПД при полной нагрузке, как правило, выше на 1–2 % чем у асинхронных и синхронных машин, а при неполной нагрузке преимущество может возрастать до 15 %.
Основным недостатком данных устройств является высокая цена их изготовления. Также стоит отметить необходимость регулярного обслуживания коллекторно-щеточного узла и определенное ограничение срока эксплуатации, вызванные его износом, однако на современных моделях эти недостатки практически полностью нивелированы.
Стоит отметить, что механическая характеристика, а значит, и все эксплуатационные показатели во многом зависят от схемы подключения обмотки возбуждения. Всего их четыре:
Способы возбуждения: а — независимое, б — параллельное, в — последовательное, г — смешанное.
Области применения ДПТ
Несмотря на то, что подавляющее большинство электрических сетей обеспечивают переменное напряжение, электродвигатели постоянного тока используются весьма и весьма широко. Собственно говоря, все промышленные приводы, где требуется точная регулировка частоты вращения, реализованы именно на базе ДПТ. Кроме того, электрические машины на постоянных магнитах благодаря своей эффективности и большой плотности мощности широко используются в оборонительной отрасли.
Впрочем, не стоит думать, что вы не сталкивались вживую с данными механизмами. Отсутствие жестких ограничений по размерам приводит к тому, что мы зачастую их не замечаем. Например, в автомобилестроении используются только электродвигатели постоянного тока, причем, несмотря на различие в мощности, на всем грузовом транспорте и спецтехнике они запитаны от 24 вольт, в то время как на легковых автомобилях их рабочее напряжение составляет 12 вольт. Получая энергию от аккумуляторной батареи или генератора, они отвечают за позиционирование сидений, управление зеркалами, поднятие и опускание стекол, а также поддержание в салоне заданной температуры.
Впрочем, электродвигатели постоянного тока могут и сами приводить в движение транспортные средства, и это далеко не только игрушечные автомобили-аттракционы с 12-вольтным аккумулятором. Для того чтобы ощутить, насколько мощными могут быть эти устройства, достаточно оказаться вблизи проходящей мимо пригородной электрички, а мягкость и точность регулировки оборотов наглядно демонстрирует плавный разгон троллейбусов.
Данные электродвигатели широко применяются как в электрическом транспорте (метро, троллейбус, трамвай, пригородные электрические железные дороги, электровозы), так и в подъемных устройствах (электрические подъемные краны).
Назначение и области применения электродвигателей постоянного тока | Полезные статьи
Современная промышленность использует самое разнообразное оборудование, которое приводит в движение электродвигатель постоянного тока. Непрерывная работа этого узла оборудования является необходимым условием нормального функционирования других устройств или производственных линий.
Постоянные электродвигатели изготавливаются с коллекторно-щеточными узлами, через которые электрический ток подается на якорь. Существуют и бесколлекторные версии, но они используются только на специальных производствах, поскольку слишком дороги. По конструкции любой электродвигатель постоянного тока запускается возбуждением от постоянного или электрического магнита.
Принцип работы электрического двигателя постоянного тока базируется на вращении рамки, по которой протекает электрический ток в постоянном магнитном поле. В современных устройствах рамка заменена якорем с проводниками, уложенными в специальные пазы, а постоянный двухполюсный магнит — статором с четным количеством полюсов, которые представляют собой постоянные или электрические магниты. Статор образует стационарное магнитное поле с противостоящими северным и южным полюсами. При пропускании тока через якорь на провод, вставленный в него, действует сила, вращающая весь якорь. Для того чтобы движение не остановилось, коллектор, которым оборудуются постоянные электродвигатели, меняет направление тока в обмотке якоря. В результате получается эффективное устройство, преобразующее электрическую энергию в механическую.
На сегодняшний день данные устройства применяются в самых разных сферах деятельности. Электродвигатели постоянного тока, технические характеристики которых имеют широкий диапазон, могут применяться в таких бытовых приборах, как дрель, электробритва или вентилятор. В промышленности используются устройства с высокими частотами вращения в десятки тысяч оборотов в минуту с мощностью порядка нескольких мегаватт. С их помощью приводится в движение промышленное оборудование, станки, насосы трубопроводов и т. д.
Для безопасной эксплуатации электродвигатель постоянного тока каждого типа имеет несколько степеней защиты. Наиболее простой вариант — защита токоведущих и вращающихся частей от случайного прикосновения. Именно поэтому кабели, при помощи которых производится подключение устройства, должны иметь хорошую изоляцию. Сечение подводящих кабелей подбирается исходя из мощности двигателя и длины линии по специальным таблицам. Для работы в сложных условиях разработаны электродвигатели постоянного тока, технические характеристики которых включают различные степени влаго- и пылезащищенности. В некоторых случаях, например при установке устройств на предприятиях нефтеперерабатывающей промышленности, целесообразно использовать взрывозащищенные модели, которые при работе не дают искрения.
Двигатель постоянного тока с параллельным возбуждением
Существует несколько возможных разновидностей построения эл моторов, работающих от источника постоянного напряжения. Принцип их действия одинаков, а отличия заключаются в особенностях подключения обмотки возбуждения (ОВ) и якоря (Я).
Свое название эл двигатель постоянного тока с параллельным возбуждением получил потому, что его обмотка Я и ОВ соединяются друг с другом именно таким образом. Электродвигатель такой разновидности обеспечивает нужные режимы, превосходя изделия последовательного и смешанного типов тогда, когда требуется практически постоянная скорость его функционирования.
Построение двигателя и область его применения
Схема электродвигателя рассматриваемого типа изображена ниже.
- общий ток, потребляемый эл мотором от источника, составляет I = IЯ + IВ, где IЯ, IВ – токи через якорь, обмотку возбуждения, соответственно,
- одновременно IВ не зависит от IЯ, то есть не зависит от нагрузки.
Устройство применяется тогда, когда пуск не требует обеспечения высокого момента, то есть когда режимы эксплуатации приводных механизмов не предполагают создание больших стартовых нагрузок. Это типично для станков и вентиляторов.
Для практики ценны такие полезные тяговые параметры подобных эл механизмов как
- устойчивость работы при колебаниях нагрузки,
- высокая экономичность из-за того, что IЯ не протекает через ОВ.
Пуск при недостаточном моменте обеспечивается переходом на схему смешанного типа.
Поведение электромотора при изменении нагрузок
Механическая характеристика показывает устойчивость работы электромотора в широком диапазоне изменения нагрузок, описывая зависимость момента, создаваемого эл двигателем, от скорости функционирования вала.
Тяговые характеристики механизма рассматриваемого типа позволяют сохранить величину момента при значительных изменения количества оборотов. Обычно тяговые параметры агрегата должен обеспечивать уменьшение этого параметра не более чем на 5 %. Несложное исследование демонстрирует: тормозные параметры из-за обратимости процессов оказываются аналогичными. Эти положения распространяются также на случай применения смешанного возбуждения.
Говоря иными словами, для такого эл мотора характерна жесткая характеристика. Такой характер работы считается важным преимуществом агрегата рассматриваемого типа.
Разновидности подходов к регулированию частоты вращения
Принцип действия параллельного включения обмоток обеспечивает плавный пуск в сочетании с большим диапазоном изменения оборотов в процессе работы с помощью реостатов. Они же обеспечивают нормальный пуск двигателя ограничением тока.
Для агрегатов параллельного типа используются способы управления скоростью функционирования изменением:
- магнитного потока главных полюсов,
- сопротивления цепи якоря,
- подаваемого на него напряжения.
Объектом воздействия являются обмотка возбуждения, обмотка якоря, его рабочее напряжение.
Изменение магнитного потока осуществляется с помощью последовательного реостата RР. При увеличении его сопротивления ОВ пропускает меньший ток, что сопровождается уменьшением магнитного потока. Внешним проявлением такого действия становится наращивание оборотов Я на холостом ходу. Исследование показывает, что происходит увеличение угла наклона характеристики.
Второй принцип основан на включении в цепь питания якоря дополнительного последовательного регулировочного реостата. При увеличении его сопротивления скорость вращения Я уменьшается, тогда как его естественная механическая характеристика приобретает больший наклон. Из-за последовательного включения с основной обмоткой реостата дополнительного сопротивления, на котором рассеивается значительная мощность, происходит заметное падение экономичности.
Третий принцип сопровождается определенным усложнением схемных решений и требует применения отдельного регулируемого источника питания с сохранением возможности раздельного регулирования. В случае его применения в реальных условиях возможно только уменьшение частоты вращения вала.
Двигатель с независимым возбуждением
Двигатель постоянного тока независимого возбуждения реализует третий подход к регулированию и интересен тем, что ОВ и М питаются от разных источников, схема его представлена ниже.
Обмотки простейшего электромотора параллельного независимого возбуждения
Для моторов в данном конструктивном исполнении Iв устанавливается неизменным, а меняется только напряжение, приложенное к М. Это сопровождается изменением числа оборотов на холостом ходу, но жесткость характеристики изменений не претерпевает.
Принцип работы такого агрегата за счет независимого функционирования двух источников оказывается более сложным. Однако, его применение дает такие важные для практики преимущества как
- плавное экономичное управление скоростью функционирования с большой глубиной,
- пуск мотора при пониженном напряжении без реостата.
В случае, если пуск происходит на нормальном напряжении, реостат ограничивает величину Iв.
Исследование показывает, что максимальное количество оборотов ограничено только сопротивлением М, а минимальное условиями отвода выделяемого тепла в процессе работы.
Характеристики в части энергопотребления и скорости срабатывания управляющей системы улучшаются в случае последовательного включения с М различных тиристорных регуляторов. Для установки числа оборотов вала и их стабилизации в процессе приведения в движение различных механизмов находят применение различные способы. Их общим характерным признаком является включение тиристорного регулятора в цепь частотной отрицательной обратной связи. Пуск такого агрегата требует реализации специальных процедур.
Заключение
Двигатель с параллельным возбуждением является очень гибким приводным механизмом и может использоваться в очень большом количестве областей там, где не требуются большие моменты при старте. Имеет несложные и надежные цепи регулирования скорости вращения, отличается простотой запуска.
Принцип действия двигателя постоянного тока
Хотя в современном электроприводе преобладают машины переменного тока (асинхронные электродвигатели), двигатели постоянного тока все еще используют и не только в предыдущих решениях.
Устройство простейшего электродвигателя постоянного тока
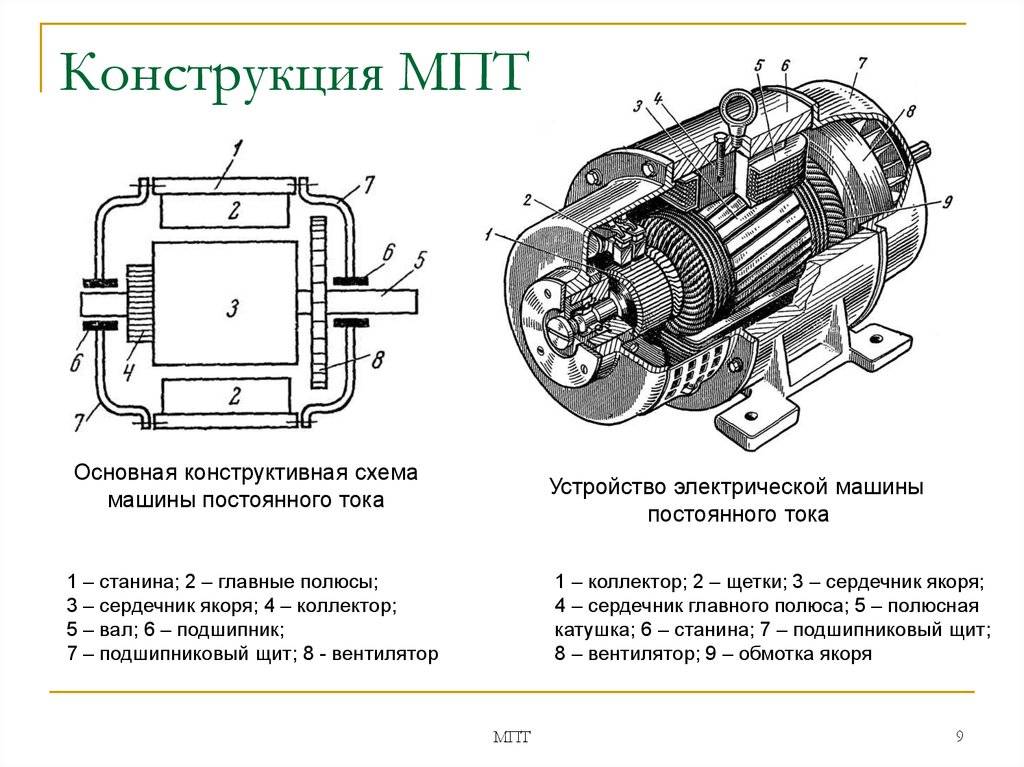
На рисунке ниже приведена простейшая машина постоянного тока:
Рисунок 1Схематическое отображение электродвигателя постоянного тока в осевом направлении показано ниже:
Рисунок 2Неподвижная часть двигателя постоянного тока называется индуктором или статором. Состоит он из полюсов и круглого стального ярма, к которому крепятся полюса. Главным назначением индуктора является генерация постоянного (основного) магнитного потока машины. Индуктор простейшей машины, отображенный выше, имеет два полюса 1 (ярмо индуктора не показано).
Вращающаяся часть машины состоит из цилиндрического якоря 2, укрепленного на валу, и коллектора 3. Якорь состоит из набранного из листов электротехнической стали сердечника и обмотки, укрепленной на сердечника якоря. Обмотка якоря в показанном на рисунке простейшем двигателе имеет один виток. Концы витка соединяются с изолированными от вала медными пластинами коллектора, число которых в рассматриваемом случае равно двум. Две неподвижные щетки 4 налегают на коллектор. С помощью щеток обмотка якоря соединяется с внешней цепью.
Основной магнитный поток в электродвигателях постоянного тока создается обмоткой возбуждения, которая запитывается постоянным напряжением и располагается на сердечниках полюсов. Магнитный поток «идет» через якорь от северного полюса N к южному полюсу S, а от него через ярмо снова к северному. Ярмо и сердечники полюсов также изготавливаются из ферромагнитных материалов.
Рисунок 3Генераторный режим двигателя постоянного тока
Предположим, что в нашем случае якорь электрической машины (рисунок 1 и рисунок 2 а)) движется по часовой стрелке. Тогда в проводниках обмотки якоря будет индуцироваться ЭДС, направление которой можно определить используя правило правой руки (рисунок 3 а)), что и показано на рисунках 1 и 2а). Поскольку поток полюсов является неизменным, то ЭДС сможет индуцироваться только в случае вращения якоря электродвигателя постоянного тока и называется ЭДС вращения.
Величина индуктируемой в проводнике обмотки якоря ЭДС будет равна:
Где: B – магнитная индукция воздушного зазора между якорем и полюсом в месте расположения проводника; l – активная длина проводника с током, то есть это длина, на протяжении которой проводник расположен в магнитном поле; υ – скорость движения проводника в магнитном поле (линейная).
В обоих проводниках из-за симметрии индуктируются одинаковые ЭДС, которые складываются по контуру витка, и поэтому полная ЭДС якоря двигателя постоянного тока будет равна:
ЭДС Еа является величиной переменной, так как проводники якорной обмотки попеременно проходят под южным и северным полюсами, в результате чего направление ЭДС в проводниках изменяется. Кривая ЭДС проводника по форме повторяет кривую распределения индукции B вдоль воздушного зазора в зависимости от времени t (рисунок 4 а)).
Рисунок 4В двухполюсной машине частота ЭДС f равна скорости вращения якоря n, выраженной в оборотах в секунду: f = n. А вот в общем случае, когда двигатель постоянного тока имеет p пар полюсов с чередующеюся полярностью:
Обмотка якоря с помощью щеток замыкается через внешнюю цепь и, соответственно, в этой цепи начинает протекать ток Ia. В обмотке якоря будет протекать переменный ток и его кривая аналогична кривой ЭДС (рисунок 4). Однако во внешней цепи протекает постоянный ток, это объясняется действием коллектора. При повороте коллектора и якоря на 900 (рисунок 1) происходит смена коллекторных пластин под щетками и изменение направления ЭДС в проводниках. Вследствие чего под верхней щеткой всегда будет находиться пластина соединенная с проводником северного полюса, а под нижней щеткой пластина соединенная с проводником южного полюса. В результате такого соединения направление тока и полярность щеток для внешней цепи остаются неизменными.
Таким образом, коллекторный узел является механическим выпрямителем, который преобразовывает переменный ток якоря в постоянный ток внешней цепи.
Изменив знак второго полупериода кривой на рисунке 4 а), получим форму кривой напряжения и тока внешней цепи (рисунок 4 б)). Пульсирующий ток внешней цепи малопригоден для практических целей. Для избавления от пульсаций применяют более сложные по своему устройству коллектор и якорь двигателя постоянного напряжения, однако основные свойства машины постоянного тока могут быть рассмотрены на примере рассматриваемого нами простейшего двигателя постоянного тока.
Постоянное напряжение на зажимах якоря генератора будет меньше Еа на величину падения напряжения в сопротивлении обмотки якоря ra:
Поскольку проводники якоря находятся в магнитном поле и через них протекает ток Ia, то на них будут действовать электромагнитные силы (рисунки 1, 2 а)):
Направление этих сил определяют с помощью правила левой руки (рисунок 3 б)). Данные силы и создают электромагнитный вращающий момент, который будет равен:
Здесь Da это диаметр якоря машины. Из рисунков 1-2 а) можно увидеть, что в генераторном режиме данный момент действует против направления вращения якоря и является тормозящим.
Режим двигателя
Простейший двигатель постоянного напряжения может работать не только в режиме генератора, но и в режиме двигателя, если к обмотке якоря подвести напряжение от внешнего источника. На проводники обмотки якоря будут действовать электромагнитные силы Fпр в результате чего создается электромагнитный момент Мэм. Как и для режима генератора, величины Fпр и Мэм вычисляются из равенств (4) и (5). При достаточной величине Мэм якорь электрической машины придет в движение и будет развивать механическую мощность. Момент Мэм в таком случае будет являться движущим, и приводить в движение якорь в направлении вращения.
Если мы хотим, чтобы при той же полярности полюсов направление вращения генератора (рисунок 1-2 а)) и двигателя (рисунок 1-2 б)) были одинаковы, то направление действия Мэм, а также тока Iа у электродвигателя постоянного напряжения должны быть обратными по сравнению с генератором (рисунок 1-2 б)).
Коллектор превращает постоянный ток из внешней цепи в переменный ток якоря в режиме двигателя, что смело можно назвать механическим инвертором тока.
Проводники обмотки якоря электрической машины тоже вращаются в магнитном поле, из-за чего в обмотке якоря двигателя индуцируется ЭДС Еа, величину которой можно определить из формулы (1). В электродвигателе направление этой ЭДС (рисунок 1-2 б)) такое же, как и в генераторе (рисунок 1-2 а)). Таким образом, ЭДС якоря Еа в двигателе направлена против тока Ia и приложенного напряжения Ua к зажимам якоря. Поэтому довольно часто ЭДС якоря называют противоэлектродвижущей силой.
Напряжение, приложенное к якорю электрической машины, уравновешивается падением напряжения на обмотке якоря и ЭДС Еа:
Если сравнить уравнения (3) и (6) можно увидеть одну очень важную особенность – в режиме генератора Ua < Ea, в режиме двигателя Ua > Ea.
Принцип обратимости электродвигателя
Из изложенных выше формул и описаний следует вывод, что каждая машина постоянного тока (и не только постоянного) может работать как в режиме двигателя, так и в режиме генератора. Такое свойство имеют все электрические машины, и оно носит название обратимость.
Для перехода двигателя постоянного тока из режима генератора в режим двигателя и обратно при неизменной полярности щеток и полюсов, а также при неизменном направлении вращения необходимо всего лишь изменить направление тока в обмотке якоря (что сейчас легко делается с помощью тиристорных преобразователей и других управляемых выпрямителей).
В современных системах такой переход осуществляется автоматически.
Преобразование энергии в двигателе постоянного тока
На рисунке 5 показаны направления действия электрических и механических величин в якоре двигателя и генератора постоянного тока.
Рисунок 5В соответствии с первым законом Ньютона в применении к вращающемуся телу, действующие на это тело тормозящие и вращающие моменты уравновешивают друг друга. Поэтому в установившемся режиме работы генератора электромагнитный момент будет равен:
Здесь Мв – момент на валу генератора, который развивает приводной двигатель, Мтр – момент трения на коллекторе электрической машины и в подшипниках, а также сопротивления воздуха, Мс – тормозящий момент, вызываемый потерями на вихревые токи и гистерезис в сердечнике якоря. Данные потери мощности возникают вследствие вращения сердечника якоря в неподвижном магнитном поле полюсов. Электромагнитные силы, возникающие при вращении ротора электрической машины постоянного тока, оказывают на ротор тормозящее действие и в таком представлении ведут себя подобно силам трения.
Электромагнитный момент двигателя постоянного тока в установившемся режиме работы будет равен:
Здесь Мв – развиваемый рабочей машиной (насос, тележка, кран…) тормозящий момент на валу электродвигателя.
В режиме генератора электромагнитный момент Мэм является движущем, а в режиме двигателя наоборот, тормозящим. При этом в обеих случаях Мв и Мэм противоположны по направлению.
Электромагнитная мощность Рэм, развиваемая электромагнитным моментом Мэм, будет равна:
Где:
В данном случае ω – это угловая скорость машины постоянного тока.
Подставив значения Мэм и ω в формулу (8) из формул (5) и (9) и учтем, что линейная скорость на окружности якоря:
Или же на основании выражения (1):
Под действием тока Ia и ЭДС Еа в обмотке якоря развивается внутренняя электрическая мощность:
Исходя из формул (10) и (11), Рэм = Ра, то есть внутренняя электрическая мощность якоря равна электромагнитной мощности, которую развивает электромагнитный момент, что довольно наглядно демонстрирует процесс преобразования электрической энергии в механическую в режиме двигателя, и процесс преобразования механической энергии в электрическую в режиме генератора.
Умножив соотношения (3) и (6) на Ia получим следующие выражения для генератора:
Левые части приведенных выше формул представляют собой электрическую мощность на зажимах якоря, первые члены первых частей электромагнитную мощность все того же якоря, и последние выражение мощность потерь в якорной цепи.
Хотя полученные формулы приведены для простейшей машины постоянного тока (рисунок 1), они все равно будут действовать и в более сложной обмотке якоря, так как моменты отдельных проводников и ЭДС складываются. Данные формулы являются выражением закона сохранения энергии и отражают процесс преобразования энергии в машине постоянного тока.
Подведем итоги
Развиваемая на валу генератора приводным электродвигателем механическая мощность, за вычетом магнитных и механических потерь, превращается в электрическую мощность (с вычетом потерь в обмотке) и передается во внешнюю цепь. В режиме двигателя электрическая мощность, подающаяся на якорь электрической машины, частично расходуется на потери, а остальная ее часть преобразуется в мощность электромагнитного поля – потом в механическую мощность, которая после вычета потерь в стали якоря и сил трения с помощью вала передается рабочей машине (лифт, станок, тяговый привод электротранспорта и другие).
Общие закономерности превращения энергии для двигателей постоянного тока также актуальны и для двигателей переменного тока.
принцип действия. Двигатель постоянного тока: устройство
Первой из всех изобретенных в 19 веке вращающихся электромашин является двигатель постоянного тока. Принцип действия его известен с середины прошлого столетия, и до настоящего времени двигатели постоянного тока (ДПТ) продолжают верно служить человеку, приводя в движение множество полезных машин и механизмов.
Первые ДПТ
Начиная с 30-х годов 19 века в своем развитии они прошли несколько этапов. Дело в том, что до появления в конце позапрошлого века машинных генераторов переменного тока единственным источником электроэнергии был гальванический элемент. Поэтому все первые электродвигатели могли работать только на постоянном токе.
Каким же был первый двигатель постоянного тока? Принцип действия и устройство двигателей, строившихся в первой половине 19 века, являлся следующим. Явнополюсный индуктор представлял собой набор неподвижных постоянных магнитов или стержневых электромагнитов, не имевших общего замкнутого магнитопровода. Явнополюсный якорь образовывали несколько отдельных стержневых электромагнитов на общей оси, приводимых во вращение силами отталкивания и притяжения к полюсам индуктора. Типичными их представителями являлись двигатели У. Риччи (1833) и Б. Якоби (1834), оснащенные механическими коммутаторами тока в электромагнитах якорях с подвижными контактами в цепи обмотки якоря.
Как работал двигатель Якоби
Каков же был у этой машины принцип действия? Двигатель постоянного тока Якоби и его аналоги обладали пульсирующим электромагнитным моментом. В течение времени сближения разноименных полюсов якоря и индуктора под действием магнитной силы притяжения момент двигателя быстро достигал максимума. Затем, при расположении полюсов якоря напротив полюсов индуктора, механический коммутатор прерывал ток в электромагнитах якоря. Момент падал до нуля. За счет инерции якоря и приводимого в движение механизма полюсы якоря выходили из-под полюсов индуктора, в этот момент в них от коммутатора подавался ток противоположного направления, их полярность также менялась на противоположную, а сила притяжения к ближайшему полюсу индуктора сменялась на силу отталкивания. Таким образом, двигатель Якоби вращался последовательными толчками.
Появляется кольцевой якорь
В стержневых электромагнитах якоря двигателя Якоби ток периодически выключался, создаваемое ими магнитное поле исчезало, а его энергия преобразовывалась в тепловые потери в обмотках. Таким образом, электромеханическое преобразование электроэнергии источника тока якоря (гальванического элемента) в механическую происходило в нем с перерывами. Нужен был двигатель с непрерывной замкнутой обмоткой, ток в которой протекал бы постоянно в течение всего времени его работы.
И такой fuhtufn был создан в 1860 году А. Пачинотти. Чем же отличался от предшественников его двигатель постоянного тока? Принцип действия и устройство двигателя Пачинотти следующие. В качестве якоря он использовал стальное кольцо со спицами, закрепленное на вертикальном валу. При этом якорь не имел явно выраженных полюсов. Он стал неявнополюсным.
Между спицами кольца были намотаны катушки обмотки якоря, концы которых соединялись последовательно на самом якоре, а от точек соединения каждых двух катушек были сделаны отпайки, присоединенные к пластинам коллектора, расположенным вдоль окружности внизу вала двигателя, число которых равнялось числу катушек. Вся обмотка якоря была замкнута сама на себя, а последовательные точки соединения ее катушек присоединялись к соседним пластинам коллектора, по которым скользила пара токоподводящих роликов.
Кольцевой якорь был помещен между полюсами двух неподвижных электромагнитов индуктора-статора, так что силовые линии создаваемого ими магнитного поля возбуждения входили в наружную цилиндрическую поверхность якоря двигателя под северным полюсом возбуждения, проходили по кольцевому якорю, не перемещаясь во внутреннее его отверстие, и выходили наружу под южным полюсом.
Как работал двигатель Пачинотти
Какой же у него был принцип действия? Двигатель постоянного тока Пачинотти работал точно так же, как и современные ДПТ.
В магнитном поле полюса индуктора с данной полярностью всегда находилось определенное число проводников обмотки якоря с током неизменного направления, причем направление тока якоря под разными полюсами индуктора было противоположным. Это достигалось размещением токоподводящих роликов, играющих роль щеток, в пространстве между полюсами индуктора. Поэтому мгновенный ток якоря втекал в обмотку через ролик, пластину коллектора и присоединенную к ней отпайку, которая также находилась в пространстве между полюсами, далее протекал в противоположных направлениях по двум полуобмоткам-ветвям, и наконец вытекал через отпайку, пластину коллектора и ролик в другом межполюсном промежутке. При этом сами катушки якоря под полюсами индуктора менялись, но направление тока в них оставалось неизменным.
По закону Ампера, на каждый проводник катушки якоря с током, находящийся в магнитном поле полюса индуктора, действовала сила, направление которой определяется по известному правилу «левой руки». Относительно оси двигателя эта сила создавала вращающий момент, а сумма моментов от всех таких сил дает суммарный момент ДПТ, который уже при нескольких пластинах коллектора является почти постоянным.
ДПТ с кольцевым якорем и граммовской обмоткой
Как это часто случалось в истории науки и техники, изобретение А. Пачинотти не нашло применения. Оно было на 10 лет забыто, пока в 1870 году его независимо не повторил франко-немецкий изобретатель З. Грамм в аналогичной конструкции генератора постоянного тока. В этих машинах ось вращения уже была горизонтальной, использовались угольные щетки, скользящие по пластинам коллектора почти современной конструкции. К 70-м годам 19 века принцип обратимости электромашин стал уже хорошо известен, а машина Грамма использовалась как генератор и двигатель постоянного тока. Принцип действия его уже описан выше.
Несмотря на то, что изобретение кольцевого якоря было важным шагом в развитии ДПТ, его обмотка (названная граммовской) имела существенный недостаток. В магнитном поле полюсов индуктора находились только те ее проводники (называемые активными), которые лежали под этими полюсами на наружной цилиндрической поверхности якоря. Именно к ним были приложены магнитные силы Ампера, создающие вращающий момент относительно оси двигателя. Те же неактивные проводники, что проходили через отверстие кольцевого якоря, не участвовали в создании момента. Они только бесполезно рассеивали электроэнергию в виде тепловых потерь.
От кольцевого якоря к барабанному
Устранить этот недостаток кольцевого якоря удалось в 1873 году известному немецкому электротехнику Ф. Гефнер-Альтенеку. Как же функционировал его двигатель постоянного тока? Принцип действия, устройство его индуктора-статора такие же, как у двигателя с кольцевой обмоткой. А вот конструкция якоря и его обмотка изменились.
Гефнер-Альтенек обратил внимание, что направление тока якоря, вытекающего из неподвижных щеток, в проводниках граммовской обмотки под соседними полюсами возбуждения всегда противоположно, т.е. их можно включить в состав витков расположенной на наружной цилиндрической поверхности катушки с шириной (шагом), равным полюсному делению (части окружности якоря, приходящейся на один полюс возбуждения).
В этом случае становится ненужным отверстие в кольцевом якоря, и он превращается в сплошной цилиндр (барабан). Такая обмотка и сам якорь получили наименование барабанных. Расход меди в ней при одинаковом числе активных проводников гораздо меньше, чем в граммовской обмотке.
Якорь становится зубчатым
В машинах Грамма и Гефнер-Альтенека поверхность якоря была гладкой, а проводники его обмотки располагались в зазоре между ним и полюсами индуктора. При этом расстояние между вогнутой цилиндрической поверхностью полюса возбуждения и выпуклой поверхностью якоря достигало нескольких миллиметров. Поэтому для создания нужной величины магнитного поля требовалось применять катушки возбуждения с большой магнитодвижущей силой (с большим числом витков). Это существенно увеличивало габариты и вес двигателей. Кроме того, на гладкой поверхности якоря его катушки было трудно крепить. Но как же быть? Ведь для действия на проводник с током силы Ампера он должен находиться в точках пространства с большой величиной магнитного поля (с большой магнитной индукцией).
Оказалось, что это не является необходимым. Американский изобретатель пулемета Х. Максим показал, что если выполнить барабанный якорь зубчатым, а в образовавшиеся между зубцами пазы поместить катушки барабанной обмотки, то зазор между ним и полюсами возбуждения можно уменьшить до долей миллиметра. Это позволило существенно уменьшить размеры катушек возбуждения, но вращающий момент ДПТ нисколько не уменьшился.
Как же функционирует такой двигатель постоянного тока? Принцип действия основан на том обстоятельстве, что при зубчатом якоре магнитная сила приложена не к проводникам в его пазах (магнитное поле в них практически отсутствует), а к самим зубцам. При этом наличие тока в проводнике в пазу имеет решающее значение для возникновения этой силы.
Как избавились от вихревых токов
Еще одно важнейшее усовершенствование внес знаменитый изобретатель Т. Эдиссон. Что же добавил он в двигатель постоянного тока? Принцип действия остался неизменным, а вот материал, из которого сделан его якорь, изменился. Вместо прежнего массивного он стал шихтованным из тонких электрически изолированных друг от друга стальных листов. Это позволило уменьшить величину вихревых токов (токов Фуко) в якоре, что увеличило КПД двигателя.
Принцип действия двигателя постоянного тока
Кратко его можно сформулировать так: при подключении обмотки якоря возбужденного двигателя к источнику питания в ней возникает большой ток, называемый пусковым и превышающий в несколько раз его номинальное значение. Причем под полюсами возбуждения противоположной полярности направление токов в проводниках обмотки якоря так же противоположно, как показано на рисунке ниже. Согласно правилу «левой руки», на эти проводники действуют силы Ампера, направленные против часовой стрелки и увлекающие якорь во вращение. При этом в проводниках обмотки якоря наводится электродвижущая сила (противо-ЭДС), направленная встречно напряжению источника питания. По мере разгона якоря растет и противо-ЭДС в его обмотке. Соответственно, ток якоря уменьшается от пускового до величины, соответствующей рабочей точке на характеристике двигателя.
Чтобы повысить скорость вращения якоря, нужно либо увеличить ток в его обмотке, либо снизить противо-ЭДС в ней. Последнего можно добиться, уменьшив величину магнитного поля возбуждения путем снижения тока в обмотке возбуждения. Данный способ управления скоростью ДПТ получил широкое распространение.
Принцип действия двигателя постоянного тока с независимым возбуждением
С присоединением выводов обмотки возбуждения (ОВ) к отдельному источнику электропитания (независимая ОВ) обычно выполняются мощные ДПТ, чтобы было более удобно регулировать величину тока возбуждения (с целью изменения скорости вращения). По своим свойствам ДПТ с независимой ОВ практически аналогичны ДПТ с ОВ, параллельно подключаемой к обмотке якоря.
Параллельное возбуждение ДПТ
Принцип действия двигателя постоянного тока параллельного возбуждения определяется его механической характеристикой, т.е. зависимостью скорости вращения от нагрузочного момента на его валу. Для такого двигателя изменение скорости при переходе от холостого вращения к номинальному моменту нагрузки составляет от 2 до 10%. Такие механические характеристики называются жесткими.
Таким образом, принцип действия двигателя постоянного тока с параллельным возбуждением обуславливает его применение в приводах с постоянной скоростью вращения при большом диапазоне изменения нагрузки. Однако он широко используется и в регулируемом электроприводе с переменной скоростью вращения. При этом для регулирования его скорости может применяться изменение как тока якоря, так и тока возбуждения.
Последовательное возбуждение ДПТ
Принцип действия двигателя постоянного тока последовательного возбуждения, как и параллельного, определяется его механической характеристикой, которая в этом случае является мягкой, т.к. частота вращения двигателя значительно варьируется при изменениях нагрузки. Где же выгоднее всего применять такой двигатель постоянного тока? Принцип действия жд тягового двигателя, скорость которого должна уменьшаться при преодолении составом подъемов и возвращаться к номинальной при движении по равнине, полностью соответствует характеристикам ДПТ с ОВ, последовательно соединенной с обмоткой якоря. Поэтому значительная часть электровозов во всем мире оснащена такими устройствами.
Принцип действия двигателя постоянного тока с последовательным возбуждением реализуют также тяговые двигатели пульсирующего тока, которые представляют собой, по сути, те же ДПТ с последовательной ОВ, но специально сконструированные для работы с выпрямленным уже на борту электровоза током, имеющим значительные пульсации.
Двигатель постоянного тока: описание принципа работы, типы
В данной статье мы подробно рассмотрим двигатели постоянного тока. Детально разберем типы и принцип работы данных двигателей. Расскажем как происходит переключение и контролирование двигателя, контролирования скорости и регулировка скорости импульса, а так же опишем как изменить направление вращения двигателя постоянного тока разными методами.
Описание и принцип работы
Электрические двигатели постоянного тока — это непрерывные приводы, которые преобразуют электрическую энергию в механическую. Двигатель постоянного тока достигает этого, создавая непрерывное угловое вращение, которое можно использовать для вращения насосов, вентиляторов, компрессоров, колес и т.д. Купить двигатель постоянного тока вы можете на Алиэкспресс:
Наряду с обычными роторными двигателями постоянного тока имеются также линейные двигатели, способные производить непрерывное движение вкладыша. Существуют в основном три типа обычных электрических двигателей: двигатели переменного тока, двигатели постоянного тока и шаговые двигатели.
Двигатели переменного тока, как правило, используются в однофазных или многофазных промышленных мощных установках, в которых постоянный крутящий момент и скорость требуются для управления большими нагрузками, такими как вентиляторы или насосы.
В этом уроке по электродвигателям мы рассмотрим только простые двигатели постоянного тока и шаговые двигатели, которые используются во многих различных типах электронных схем, систем позиционного управления, микропроцессоров, PIC и роботизированных схем.
Типы двигателей постоянного тока
Двигатель постоянного тока, является наиболее часто используемым приводом для создания непрерывного движения, скорость вращения которого легко регулируется, что делает их идеальными для использования в устройствах, таких как регулирование скорости, управление сервоприводом и / или требуется позиционирование. Двигатель постоянного тока состоит из двух частей: «Статор», который является неподвижной частью, и «Ротор», который является вращающейся частью. В результате доступно три типа двигателей постоянного тока.
- Коллекторный двигатель — этот тип двигателя создает магнитное поле в намотанном роторе (вращающаяся деталь), пропуская электрический ток через узел коммутатора и угольной щетки, отсюда и термин «щеточный». Магнитное поле статоров (неподвижная часть) создается с помощью обмотки статора или постоянных магнитов. Обычно моторы с щеткой постоянного тока дешевые, маленькие и легко управляемые.
- Бесколлекторный двигатель — этот тип двигателя создает магнитное поле в роторе, используя постоянные магниты, прикрепленные к нему, и коммутация достигается с помощью электроники. Они, как правило, меньше, но дороже, чем обычные двигатели постоянного тока щеточного типа, потому что они используют переключатели «эффекта Холла» в статоре для получения требуемой последовательности вращения поля статора, но они имеют лучшие характеристики крутящего момента / скорости, более эффективны и имеют более длительный срок эксплуатации. чем эквивалентные коллекторные типы.
- Серводвигатель — этот тип двигателя в основном представляет собой коллекторный двигатель постоянного тока с некоторой формой управления позиционной обратной связью, подключенной к валу ротора. Они подключены к контроллеру типа ШИМ и управляются им, и в основном используются в системах позиционного управления и радиоуправляемых моделях.
Обычные двигатели постоянного тока имеют почти линейные характеристики, скорость вращения которых определяется приложенным напряжением постоянного тока, а их выходной крутящий момент определяется током, протекающим через обмотки двигателя. Скорость вращения любого двигателя постоянного тока может варьироваться от нескольких оборотов в минуту (об / мин) до многих тысяч оборотов в минуту, что делает их пригодными для применения в электронике, автомобилестроении или робототехнике. При подключении их к коробкам передач или зубчатым передачам их выходная скорость может быть уменьшена, в то же время увеличивая крутящий момент двигателя на высокой скорости.
Коллекторный двигатель постоянного тока
Стандартный коллекторный двигатель постоянного тока состоит в основном из двух частей: неподвижного корпуса двигателя, называемого статором, и внутренней части, которая вращается, создавая движение, называемое ротором или «арматурой» для машин постоянного тока.
Обмотка статора двигателя представляет собой электромагнитную цепь, которая состоит из электрических катушек, соединенных вместе в круговую конфигурацию для создания необходимого северного полюса, затем южного полюса, затем северного полюса и т.д., типа стационарной системы магнитного поля для вращения, в отличие от машин переменного тока, чье поле статора постоянно вращается с приложенной частотой. Ток, который течет в этих полевых катушках, известен как ток поля двигателя.
Эти электромагнитные катушки, которые формируют поле статора, могут быть электрически соединены последовательно, параллельно или вместе с ротором двигателя. Последовательно намотанный двигатель постоянного тока имеет обмотки статора, соединенные последовательно с ротором. Аналогично, двигатель постоянного тока с шунтирующим витком имеет свои обмотки возбуждения статора, соединенные параллельно с ротором, как показано ниже.
Ротор постоянного тока состоит из токонесущих проводников, соединенных вместе на одном конце с электрически изолированными медными сегментами, называемыми коммутатором. Коммутатор позволяет осуществлять электрическое подключение через угольные щетки (отсюда и название «щеточный» двигатель) к внешнему источнику питания при вращении ротора.
Установленное ротором магнитное поле пытается выровнять себя с полем статора, заставляя ротор вращаться вокруг своей оси, но не может выровняться из-за задержек коммутации. Скорость вращения двигателя зависит от силы магнитного поля роторов, и чем больше напряжение подается на двигатель, тем быстрее вращается ротор. Изменяя это приложенное постоянное напряжение, можно также изменять частоту вращения двигателя.
Двигатель постоянного тока с щеточным постоянным магнитом (PMDC), как правило, намного меньше и дешевле, чем его эквивалентные родственники двигателя постоянного тока с обмоткой статора, поскольку они не имеют обмотки возбуждения. В двигателях с постоянными магнитами постоянного тока (PMDC) эти полевые катушки заменяются сильными магнитами типа редкоземельных элементов (например, самарий-коболт или неодим-железо-бор), которые имеют очень сильные магнитные энергетические поля.
Использование постоянных магнитов дает двигателю постоянного тока намного лучшую линейную характеристику скорости / крутящего момента, чем эквивалентные намотанные двигатели из-за постоянного и иногда очень сильного магнитного поля, что делает их более подходящими для использования в моделях, робототехнике и сервоприводах.
Хотя щеточные электродвигатели постоянного тока очень эффективны и дешевы, проблемы, связанные с щеточным электродвигателем постоянного тока, заключаются в том, что искрение возникает в условиях большой нагрузки между двумя поверхностями коммутатора и угольных щеток, что приводит к самогенерированию тепла, короткому сроку службы и электрическому шуму из-за искрения, что может повредить любое полупроводниковое коммутационное устройство, такое как МОП-транзистор или транзистор. Чтобы преодолеть эти недостатки, были разработаны бесщеточные или бесколлекторные двигатели постоянного тока.
Бесколлекторный двигатель постоянного тока
Бесщеточный (бесколлекторный) двигатель постоянного тока (BDCM) очень похож на двигатель постоянного тока с постоянными магнитами, но не имеет щеток для замены или износа из-за искрения коммутатора. Поэтому в роторе выделяется мало тепла, что увеличивает срок службы двигателей. Конструкция бесщеточного двигателя устраняет необходимость в щетках благодаря более сложной схеме привода, в которой магнитное поле ротора является постоянным магнитом, который всегда синхронизирован с полем статора, что позволяет более точно контролировать скорость и крутящий момент.
Тогда конструкция бесщеточного двигателя постоянного тока очень похожа на двигатель переменного тока, что делает его истинным синхронным двигателем, но одним недостатком является то, что он дороже, чем аналогичная конструкция «щеточного» двигателя.
Управление бесщеточными двигателями постоянного тока очень отличается от обычного щеточного двигателя постоянного тока тем, что этот тип двигателя включает в себя некоторые средства для определения углового положения роторов (или магнитных полюсов), необходимые для получения сигналов обратной связи, необходимых для управления переключением полупроводников. Самым распространенным датчиком положения / полюса является «Датчик Холла», но некоторые двигатели также используют оптические датчики.
При использовании датчиков с эффектом Холла полярность электромагнитов переключается с помощью схемы управления двигателем. Тогда двигатель можно легко синхронизировать с цифровым тактовым сигналом, обеспечивая точное управление скоростью. Бесщеточные двигатели постоянного тока могут быть сконструированы так, чтобы иметь внешний ротор с постоянными магнитами и внутренний статор электромагнита или внутренний ротор с постоянными магнитами и внешний статор электромагнита.
Преимущества бесщеточного двигателя постоянного тока по сравнению с его «щеточным» кузеном заключаются в более высокой эффективности, высокой надежности, низком электрическом шуме, хорошем контроле скорости и, что более важно, отсутствии износа щеток или коммутатора, что обеспечивает значительно более высокую скорость. Однако их недостатком является то, что они более дороги и сложнее в управлении.
Серводвигатель постоянного тока
Серводвигатели постоянного тока используются в системах с замкнутым контуром, в которых положение выходного вала двигателя возвращается обратно в цепь управления двигателем. Типичные позиционные устройства «обратной связи» включают в себя резольверы, энкодеры и потенциометры, используемые в моделях радиоуправления, таких как самолеты, лодки и т.д.
Серводвигатель, как правило, включает в себя встроенную коробку передач для снижения скорости и способен напрямую выдавать высокие крутящие моменты. Выходной вал серводвигателя не вращается свободно, как валы двигателей постоянного тока из-за присоединения редуктора и устройств обратной связи.
Блок-схема серводвигателя постоянного тока
Серводвигатель состоит из двигателя постоянного тока, редуктора, устройства позиционной обратной связи и некоторой формы коррекции ошибок. Скорость или положение контролируется по отношению к позиционному сигналу входного сигнала или опорного приложенному к устройству.
Усилитель обнаружения ошибок просматривает этот входной сигнал и сравнивает его с сигналом обратной связи с выходного вала двигателя и определяет, находится ли выходной вал двигателя в состоянии ошибки, и, если это так, контроллер вносит соответствующие исправления, либо ускоряя двигатель, либо замедляя его вниз. Эта реакция на устройство позиционной обратной связи означает, что серводвигатель работает в «замкнутой системе».
Наряду с крупными промышленными применениями серводвигатели также используются в небольших моделях с дистанционным управлением и робототехнике, причем большинство серводвигателей способны вращаться примерно на 180 градусов в обоих направлениях, что делает их идеальными для точного углового позиционирования. Тем не менее, эти сервоприводы типа RC не могут непрерывно вращаться на высокой скорости, как обычные двигатели постоянного тока, если специально не модифицированы.
Серводвигатель состоит из нескольких устройств в одном корпусе, двигателя, коробки передач, устройства обратной связи и коррекции ошибок для контроля положения, направления или скорости. Они широко используются в робототехнике и небольших моделях, так как ими легко управлять, используя всего три провода: питание , заземление и управление сигналами.
Переключение и контроль двигателя постоянного тока
Небольшие двигатели постоянного тока могут быть включены «Вкл» или выключены «Выкл» с помощью переключателей, реле, транзисторов или МОП-транзисторов, причем простейшей формой управления двигателем является «линейное» управление. Схема этого типа использует биполярный транзистор в качестве переключателя (транзистор Дарлингтона также может использоваться, если требуется более высокий номинальный ток) для управления двигателем от одного источника питания.
Изменяя величину тока базы, протекающего в транзистор, можно управлять скоростью двигателя, например, если транзистор включен наполовину, тогда только половина напряжения питания поступает на двигатель. Если транзистор включен полностью (насыщен), то все напряжение питания поступает на двигатель и вращается быстрее. Затем для этого линейного типа управления мощность постоянно подается на двигатель, как показано ниже.
Контроль скорости двигателя
Простая схема переключения, приведенная выше, показывает схему для однонаправленной (только в одном направлении) цепи управления скоростью двигателя. Поскольку скорость вращения двигателя постоянного тока пропорциональна напряжению на его клеммах, мы можем регулировать это напряжение на клеммах с помощью транзистора.
Два транзистора соединены в виде пары Дарлингтона для управления током основного ротора двигателя. 5 кОм потенциометр используется для регулирования количества базового привода на первый пилот — транзистора TR 1 , который, в свою очередь, контролирует главный коммутационный транзистор TR 2 , позволяя изменять напряжение постоянного тока двигателя от нуля до Vcc, в этом примере от 9 до 12 вольт.
Опциональные диоды маховика подключены к переключающему транзистору TR 2 и клеммам двигателя для защиты от любой обратной ЭДС, создаваемой двигателем при его вращении. Регулируемый потенциометр может быть заменен непрерывным логическим «1» или логическим «0» сигналом, подаваемым непосредственно на вход цепи, чтобы переключить двигатель «полностью включено» (насыщение) или «полностью выключено» (отключение) соответственно из порта микроконтроллера или ПОС.
Наряду с этим базовым контролем скорости, та же схема также может использоваться для управления скоростью вращения двигателей. Путем многократного переключения тока двигателя «ВКЛ» и «ВЫКЛ» на достаточно высокой частоте, скорость двигателя можно варьировать от состояния покоя (0 об / мин) до полной скорости (100%), изменяя отношение бестокового пространства к его запасу. Это достигается путем изменения соотношения времени включения (t ON ) и времени выключения (t OFF ), и это может быть достигнуто с помощью процесса, известного как широтно-импульсная модуляция (ШИМ).
Регулировка скорости импульса
Ранее мы говорили, что скорость вращения двигателя постоянного тока прямо пропорциональна среднему значению напряжения на его клеммах, и чем выше это значение, вплоть до максимально допустимого напряжения двигателя, тем быстрее будет вращаться двигатель. Другими словами, больше напряжения, больше скорости. Изменяя соотношение между временем «ВКЛ» (t ВКЛ ) и временем «ВЫКЛ» (t ВЫКЛ ), которое называется «Коэффициент заполнения», или «Рабочий цикл», среднее значение напряжения двигателя и, следовательно, его скорость вращения может варьироваться. Для простых униполярных приводов коэффициент заполнения β задается как:
и среднее выходное напряжение постоянного тока, подаваемое на двигатель, определяется как: Vmean = β x Vsupply. Затем, изменяя ширину импульса а, можно управлять напряжением двигателя и, следовательно, мощностью, подаваемой на двигатель, и этот тип управления называется широтно-импульсной модуляцией или ШИМ.
Другим способом управления частотой вращения двигателя является изменение частоты (и, следовательно, периода времени управляющего напряжения), в то время как времена коэффициента включения «ВКЛ» и «ВЫКЛ» поддерживаются постоянными. Этот тип управления называется частотно-импульсной модуляцией или PFM .
При частотно-импульсной модуляции напряжение двигателя регулируется путем подачи импульсов переменной частоты, например, на низкой частоте или с очень небольшим количеством импульсов, среднее напряжение, подаваемое на двигатель, является низким, и, следовательно, скорость двигателя является низкой. При более высокой частоте или множестве импульсов среднее напряжение на клеммах двигателя увеличивается, и скорость двигателя также увеличивается.
Затем транзисторы можно использовать для управления количеством энергии, подаваемой на двигатель постоянного тока с режимом работы: «линейная» (изменение напряжения двигателя), «широтно-импульсная модуляция» (изменение ширины импульса) или «частотно — импульсная модуляция»(изменение частоты импульса).
Изменение направления движения двигателя постоянного тока
Хотя управление скоростью двигателя постоянного тока с помощью одного транзистора имеет много преимуществ, оно также имеет один главный недостаток: направление вращения всегда одинаковое, это «однонаправленная» схема. Во многих случаях нам необходимо управлять двигателем в обоих направлениях вперед и назад.
Для управления направлением двигателя постоянного тока необходимо поменять полярность питания постоянного тока, подаваемого на соединения двигателя, чтобы его вал вращался в противоположном направлении. Один очень простой и дешевый способ управления направлением вращения двигателя постоянного тока состоит в использовании различных переключателей, расположенных следующим образом:
В первом контуре используется одинарный двухполюсный, двухходовый переключатель (DPDT) для контроля полярности соединений двигателей. При переключении контактов подача на клеммы двигателя изменяется, и двигатель меняет направление. Второй контур немного сложнее и использует четыре однополюсных, одноходовых (SPST) переключателя, расположенных в «H» -конфигурации.
Механические переключатели расположены в виде пары переключений и должны работать в определенной комбинации для работы или остановки двигателя постоянного тока. Например, комбинация переключателей A + D управляет вращением вперед, в то время как переключатели B + C управляют вращением назад, как показано на рисунке. Комбинации переключателей A + B или C + D замыкают клеммы двигателя, вызывая его быстрое торможение. Тем не менее, использование переключателей таким образом имеет свои опасности, так как рабочие переключатели A + C или B + D вместе отключат источник питания.
В то время как две вышеупомянутые схемы будут очень хорошо работать для большинства небольших двигателей постоянного тока, мы действительно хотим использовать различные комбинации механических переключателей только для изменения направления вращения двигателя, НЕТ! Мы могли бы изменить ручные переключатели для набора электромеханических реле и иметь одну кнопку прямого или обратного хода или даже использовать твердотельный четырехпозиционный двусторонний переключатель CMOS 4066B.
Но еще один очень хороший способ достижения двунаправленного управления двигателем (а также его скоростью) состоит в том, чтобы подключить двигатель к схеме транзисторного типа H-моста, как показано ниже.
H-мостовая схема двигателя
Схема H-моста, приведенная выше, названа так потому, что базовая конфигурация четырех переключателей, либо электромеханических реле, либо транзисторов, напоминает букву «H» с двигателем, расположенным на центральной шине. Транзистор или МОП-транзистор является, вероятно, одним из наиболее часто используемых типов двунаправленных цепей управления двигателем постоянного тока. Он использует «комплементарные пары транзисторов» как NPN, так и PNP в каждой ветви, причем транзисторы попарно объединяются для управления двигателем.
Управляющий вход A управляет двигателем в одном направлении, т.е. вращением вперед, в то время как вход B управляет двигателем в другом направлении, т.е. обратным вращением. Затем переключение транзисторов «ВКЛ» или «ВЫКЛ» в их «диагональных парах» приводит к направленному управлению двигателем.
Например, когда транзистор TR1 включен, а транзистор TR2 выключен, точка A подключена к напряжению питания (+ Vcc), а если транзистор TR3 выключен, а транзистор TR4 включен, точка B подключена к 0 вольт (GND). Затем двигатель будет вращаться в одном направлении, соответствующем положению клеммы А двигателя и положительной клемме В двигателя.
Если состояния переключения меняются местами так, что TR1 — «ВЫКЛ», TR2 — «ВКЛ», TR3 — «ВКЛ» и TR4 — «ВЫКЛ», ток двигателя будет течь в противоположном направлении, вызывая вращение двигателя в противоположном направлении.
Затем, применяя противоположные логические уровни «1» или «0» к входам A и B, направление вращения двигателя можно регулировать следующим образом.
Таблица истинности H-моста
| Вход А | Вход B | Функция двигателя |
| TR1 и TR4 | TR2 и TR3 | |
| 0 | 0 | Двигатель остановлен (OFF) |
| 1 | 0 | Мотор вращается вперед |
| 0 | 1 | Мотор вращается задним ходом |
| 1 | 1 | НЕ ПОЛОЖЕНО |
Важно, чтобы никакая другая комбинация входов не допускалась, так как это может привести к короткому замыканию источника питания, то есть оба транзистора, TR1 и TR2, были включены в одно и то же время (предохранитель = взрыв!).
Как и в случае однонаправленного управления двигателем постоянного тока, как показано выше, скорость вращения двигателя также можно регулировать с помощью широтно-импульсной модуляции или ШИМ. Затем, комбинируя переключение Н-моста с ШИМ-управлением, можно точно контролировать направление и скорость двигателя.
Имеющиеся в продаже готовые ИС- декодеры, такие как четырехполупроводниковая ИС H-моста SN754410 или L298N с двумя H-мостами, доступны со всей необходимой встроенной логикой управления и безопасности, специально разработанные для двунаправленных цепей управления двигателем H-моста.
Управление направлением двигателя постоянного токас использованием Arduino
Привет друзья! Я надеюсь, что вы все будете в полном порядке и весело проведете время. Сегодня я собираюсь поделиться со всеми своими знаниями о том, как создать простую программу для управления направлением двигателя постоянного тока с использованием Arduino. Слово DC в основном представляет собой сокращение от Постоянный ток . Таким образом, обычно используется двигатель постоянного тока с двумя входными клеммами, одна из которых является положительной, а другая — отрицательной. Если мы подключим эти клеммы к источнику напряжения, двигатель будет вращаться.Если вы измените полярность, двигатель будет вращаться в противоположном направлении. Вы также должны взглянуть на Различия между двигателями постоянного и переменного тока, чтобы получить лучшее представление об этих двигателях. Двигатель постоянного тока имеет множество применений. Вы можете использовать его в проектах автоматизации, для управления статическими и мобильными роботами, в транспортных системах, в насосах, вентиляторах, беседках, а также для промышленного использования. В этом уроке я буду использовать DC Motor Direction Control , используя Arduino и контроллер двигателя L298. Кроме того, я также использовал ЖК-дисплей, который показывает состояние нашего двигателя постоянного тока i.е. будь то движение по часовой стрелке или против часовой стрелки. В моем последующем руководстве я буду управлять тем же двигателем постоянного тока с помощью NI LabVIEW 2015 и MATLAB. Я добавил следующее руководство по этому проекту, в котором я использовал управление направлением двигателя постоянного тока в MATLAB, поэтому в этом проекте я использовал то же оборудование, но вместо того, чтобы управлять им из Arduino, я управлял им с помощью MATLAB, поэтому у вас должен быть посмотрите этот учебник.Управление направлением двигателя постоянного тока с использованием Arduino
В этом руководстве я напишу простую программу для управления направлением двигателя постоянного тока с помощью Arduino.Arduino — это, по сути, потрясающий микроконтроллер, который очень прост в использовании, потому что это устройство с открытым исходным кодом. Итак, это устройство, удобное для студентов. Вы также можете писать программы для Arduino для разных целей. Arduino также является экономичным устройством по сравнению с другими микроконтроллерами, например. raspberyy pi, NI-myRIO, galileo, single board RIO и т. д. Прежде всего я подготовил полную настройку оборудования. Затем я сделал программу и связал ее с оборудованием. Мы подробно обсудим все шаги ниже.Логика довольно проста, то есть Arduino должен отправлять команды контроллеру двигателя L298, а затем L298 определяет управление направлением двигателя постоянного тока, манипулируя командами Arduino. Прежде чем вдаваться в подробности, я хочу показать вам список необходимых компонентов. Вы можете скачать полный исходный файл Arduino здесь:
Скачать исходный код Arduino
Примечание: Если вы работаете с двигателем постоянного тока, вам также стоит взглянуть на эти модели Proteus Simulations:Список компонентов и описание
Вот полный список компонентов, необходимых для разработки управления направлением двигателя постоянного тока с использованием Arduino:шаговых двигателей, контроллеров, приводов.Разработка и продажа. Smart Motor Devices OÜ
Мы проектируем и производим
качественно и экономично
блоки для шагового движения
управление — драйверы и …
контроллеры
для шаговых двигателей. Мы также продаем шаговые двигатели разных размеров.
Наш последний продукт — шаговые двигатели со встроенными драйверами, эти устройства экономят место в системе приложений.
Наши контроллеры шаговых двигателей серии SMSD обеспечивают аналоговое управление скоростью и положением, командное управление, импульсное управление и некоторые специальные функции для лучшей интеграции в систему заказчика.
Наша компания разрабатывает контроллеры для бесщеточных двигателей постоянного тока с
ток до 50Амп. Эти
блоки управления 3-х фазные …
DC
бесщеточные двигатели с Холлом
датчики, обеспечивают плавное
движения и просты в использовании. Мы также продаем бесщеточные двигатели постоянного тока.
Контроллеры регулируют скорость, направление вращения двигателя, плавный пуск и остановку. Есть несколько специальных входов для управления ПЛК и интерфейс RS-485 для управления командами.
Щеточные мотор-редукторы постоянного тока — один из наиболее часто используемых приводов. Предлагаем маломощные двигатели с цилиндрическими, планетарными …
или червячными передачами.
Наши контроллеры для щеточных двигателей постоянного тока предназначены для небольших двигателей мощностью менее 300 Вт и до 12 А. Эти единицы скорость управления, направление, плавный старт и остановка мотора. Есть скорость функция стабилизации для двигателей с кодировщик.
Функция RS-485 обеспечивает командное управление, реальную скорость и направление двигателя (для двигателей с энкодером), а также есть функция счетчика оборотов.
КонтроллерBMD-R предоставляет возможность дистанционного управления.
Мы предлагаем HMI с предварительно загруженным программным обеспечением, специально разработанным для управления нашими моторными приводами. …
Панели HMIиспользуются для простого и удобного управления устройствами на производстве или в системах, где использование компьютеров не разрешено или неудобно.
3D-принтер SkyOne — это универсальный станок, сочетающий в себе простой в использовании 3D-принтер, гравер и фрезерный станок с ЧПУ…
станков. Этот 3D-принтер имеет адаптивную конструкцию и оснащен съемной печатающей головкой и съемным столом. Таким образом, можно установить рабочий инструмент, подходящий для конкретной задачи: шпиндель, дозатор, вакуумный захват, воздушный маркер и т. Д.
Модули линейного движения LML состоят из алюминиевой секции (направляющей), каретки, шагового двигателя и шкива ….
Эти модули предназначены для точного и точного линейного перемещения груза.Линейные модули LML поставляются с шаговым двигателем NEMA 17. Конструкция модулей обеспечивает бесперебойную и точную работу.
Применение бесщеточного двигателя постоянного тока с использованием синхронного двигателя с постоянным магнитом (PMSM) с трапецеидальной противоэлектродвижущей силой (BEMF)
Реализуйте бесщеточный привод постоянного тока с использованием синхронного двигателя с постоянным магнитом (PMSM) с трапецеидальной обратной электродвижущей силой (BEMF). Блок бесщеточного двигателя постоянного тока (AC7) представляет собой стандартный привод с регулируемым током для бесщеточных двигателей постоянного тока (BLDC).Двигатели BLDC также известны как синхронные двигатели с постоянными магнитами и трапецеидальной обратной ЭДС. В этом приводе реализовано регулирование скорости с обратной связью посредством регулирования тока статора с помощью датчиков Холла. Контур управления скоростью выдает эталонный электромагнитный момент машины. Опорные фазные токи статора, соответствующие заданному крутящему моменту, выводятся на основе постоянной крутящего момента машины и сигналов датчика Холла. Затем эталонные фазные токи используются для получения требуемых сигналов затвора для инвертора через регулятор тока полосы гистерезиса.
Основным преимуществом этого привода по сравнению с приводами BLDC с ШИМ-инвертором, управляемыми напряжением, является его плавный динамический отклик. Этот привод обеспечивает внутреннюю способность ограничения тока / момента во время запуска и разгона двигателя. Однако для правильной работы приводу требуется управление крутящим моментом с обратной связью на основе сигналов машинных токов.
Примечание
В Simscape ™
В программе Electrical ™ Specialized Power Systems блок бесщеточного двигателя постоянного тока обычно называют моторным приводом AC7 .
Блок Brushless DC Motor Drive использует эти блоки из библиотеки Electric Drives / Fundamental Drive Blocks:
Замечания
Модель является дискретной. Хорошие результаты моделирования были получены с временным шагом 2 µ с. Для моделирования устройства цифрового контроллера система управления имеет два разных времени выборки:
Время выборки регулятора скорости должно быть кратно времени выборки регулятора тока. Последнее время выборки должно быть кратным временному шагу моделирования.Инвертор среднего значения позволяет использовать большие временные шаги моделирования, поскольку он не генерирует небольшие постоянные времени (из-за RC демпферов), присущие детализированному преобразователю. Для времени выборки регулятора тока 40 µ с хорошие результаты моделирования были получены для временного шага моделирования 40 µ с. Временной шаг моделирования не может быть выше временного шага текущего контроллера.
Параметры
Общие
- Режим выходной шины
-
Выберите способ организации выходных переменных.Если вы выберете
Несколько выходных шин(по умолчанию), блок будет иметь три отдельные выходные шины для переменных двигателя, преобразователя и контроллера. Если вы выберетеОдиночная шина вывода, все переменные будут выводиться на одной шине. - Уровень детализации модели
-
Выберите между детальным и средним инвертором. По умолчанию
Детальный. - Механический вход
-
Выберите между крутящим моментом нагрузки, скоростью двигателя и механическим портом вращения в качестве механического входа.По умолчанию
Torque Tm.Если выбрать и применить крутящий момент нагрузки, на выходе будет скорость двигателя в соответствии со следующим дифференциальным уравнением, описывающим динамику механической системы:
Эта механическая система включена в модель двигателя.
Если вы выбираете скорость двигателя как механический вход, то вы получаете электромагнитный крутящий момент в качестве выходного сигнала, что позволяет вам представить внешнюю динамику механической системы. Внутренняя механическая система не используется с этим выбором механического входа, а параметры инерции и вязкого трения не отображаются.
Для механического вращающегося порта порт подключения S учитывает механический ввод и вывод. Это позволяет напрямую подключаться к среде Simscape. Механическая система двигателя также включена в привод и основана на том же дифференциальном уравнении.
См. Механическое соединение двух моторных приводов.
- Использовать шину в качестве меток
-
Когда вы установите этот флажок, измерительные выходы
Motor,ConvиCtrlиспользуют имена сигналов для идентификации меток шин.Выберите этот вариант для приложений, в которых на метках сигналов шины должны быть только буквенно-цифровые символы.Когда этот флажок снят (по умолчанию), выход измерения использует определение сигнала для идентификации меток шины. Этикетки содержат не буквенно-цифровые символы, которые несовместимы с некоторыми приложениями Simulink ® .
- Установить без датчика
-
Когда вы установите этот флажок, скорость и положение двигателя оцениваются на основе напряжений и токов на клеммах с помощью наблюдателя обратной ЭДС.Сигналы коммутации (эквивалентные сигналам эффекта Холла) генерируются из положения ротора каждые 60 электрических градусов. Вкладка Sensorless содержит параметры усиления наблюдателя.
Когда этот флажок снят, скорость двигателя измеряется внутренним датчиком скорости, а вкладка Sensorless не отображается на маске блока.
Вкладка «Синхронная машина с постоянным магнитом»
Вкладка «Синхронная машина с постоянным магнитом» отображает параметры блока «Синхронная машина с постоянным магнитом» библиотеки Fundamental Blocks (powerlib).
Вкладка «Преобразователи и шина постоянного тока»
Раздел «Выпрямитель »В разделе «Выпрямитель » вкладки «Преобразователи и шина постоянного тока » отображаются параметры блока Universal Bridge библиотеки Fundamental Blocks (powerlib). Дополнительные сведения о параметрах универсального моста см. На справочной странице универсального моста.
Секция шины постоянного тока- Емкость
-
Емкость шины постоянного тока (F). По умолчанию
2000e-6.
- Сопротивление
-
Сопротивление тормозного прерывателя, используемое для предотвращения перенапряжения шины во время замедления двигателя или когда крутящий момент нагрузки имеет тенденцию к ускорению двигателя (Ом). По умолчанию
8. - Частота прерывателя
-
Частота тормозного прерывателя (Гц). По умолчанию
4000. - Напряжение включения
-
Динамическое торможение активируется, когда напряжение на шине достигает верхнего предела диапазона гистерезиса.На следующем рисунке показана логика гистерезиса тормозного прерывателя. По умолчанию
320. - Напряжение отключения
-
Динамическое торможение отключается, когда напряжение на шине достигает нижнего предела диапазона гистерезиса. По умолчанию
310. Логика гистерезиса прерывателя показана на следующем рисунке.
Раздел Inverter вкладки Converters and DC Bus отображает параметры блока Universal Bridge библиотеки Fundamental Blocks (powerlib).Дополнительные сведения о параметрах универсального моста см. На справочной странице универсального моста.
Преобразователь среднего значения использует следующий параметр.
- Сопротивление в открытом состоянии
-
Сопротивление переключателя инвертора в открытом состоянии (Ом). По умолчанию
1e-3.
Вкладка «Контроллер»
- Тип регулирования
-
Это всплывающее меню позволяет выбирать между регулировкой скорости и крутящего момента.По умолчанию
Регулировка скорости. - Схема
-
При нажатии этой кнопки появляется диаграмма, показывающая схемы контроллеров скорости и тока.
- Рампы скорости — ускорение
-
Максимальное изменение скорости, допустимое во время разгона двигателя (об / мин / с). Чрезмерно большое положительное значение может вызвать пониженное напряжение на шине постоянного тока. Этот параметр используется только в режиме регулирования скорости.По умолчанию
1000. - Изменения скорости — замедление
-
Максимальное изменение скорости, допустимое во время замедления двигателя (об / мин / с). Слишком большое отрицательное значение может вызвать перенапряжение шины постоянного тока. Этот параметр используется только в режиме регулирования скорости. По умолчанию
-1000. - Частота отсечки скорости
-
Частота отсечки фильтра нижних частот первого порядка измерения скорости (Гц). Этот параметр используется только в режиме регулирования скорости.По умолчанию
100. - Время выборки регулятора скорости
-
Время выборки регулятора скорости (с). Время выборки должно быть кратным временному шагу моделирования. По умолчанию
7 * 20e-6. - ПИ-регулятор — Пропорциональное усиление
-
Пропорциональное усиление регулятора скорости. Этот параметр используется только в режиме регулирования скорости. По умолчанию
5. - ПИ-регулятор — интегральное усиление
-
Интегральное усиление регулятора скорости.Этот параметр используется только в режиме регулирования скорости. По умолчанию
100. - Пределы выходного крутящего момента — отрицательные
-
Максимальный отрицательный требуемый крутящий момент, прикладываемый к двигателю регулятором тока (Н-м). По умолчанию
-17,8. - Пределы выходного крутящего момента — положительный
-
Максимальный положительный требуемый крутящий момент, прикладываемый к двигателю регулятором тока (Н-м). По умолчанию
17,8.
- Время выборки
-
Время выборки контроллера тока (с). Время выборки должно быть кратным временному шагу моделирования. По умолчанию —
20e-6. - Диапазон гистерезиса регулятора тока
-
Текущая полоса гистерезиса. Это значение представляет собой общую полосу пропускания, симметрично распределенную относительно текущей уставки (A). На следующем рисунке показан случай, когда текущая уставка Is * , а текущая полоса гистерезиса установлена на dx.По умолчанию
0,01.Этот параметр не используется при использовании инвертора среднего значения.
Примечание
Эта полоса пропускания может быть превышена, поскольку используется моделирование с фиксированным шагом. Блок перехода скорости требуется для передачи данных между разными частотами дискретизации. Этот блок вызывает задержку сигналов затвора, поэтому ток может превышать полосу гистерезиса.
- Максимальная частота коммутации
-
Максимальная частота коммутации инвертора (Гц).Этот параметр не используется при использовании инвертора среднего значения. По умолчанию
20e3. - Показать / скрыть элемент управления автонастройкой
-
Щелкните, чтобы показать или скрыть параметры инструмента управления автонастройкой.
- Желаемое демпфирование [дзета]
-
Укажите коэффициент демпфирования, используемый для расчета коэффициентов усиления Kp и Ki блока регулятора скорости (AC). Коэффициент демпфирования определяется как
Собственная частота определяется следующими эмпирическими уравнениями:
Если ζ <0.69
ωn = −1ζ × rdlog (0,05 × (1 − ζ2))
Если ζ ≥ 0,69
В уравнении T rd соответствует параметру Желаемое время отклика при 5% . По умолчанию
0,99. - Желаемое время отклика при 5% [Trd (sec)]
-
Укажите желаемое время установления блока регулятора скорости (AC). Это время, необходимое для того, чтобы реакция контроллера достигла и оставалась в пределах 5-процентного диапазона целевого значения.По умолчанию
0,13 / 5. - Вычислить коэффициенты усиления ПИ-регулятора
-
Вычислить Пропорциональное усиление и Интегральное усиление параметров блока регулятора скорости (AC) на основе Желаемое демпфирование [zeta] и Желаемое время отклика при 5% параметров. Вычисленные значения отображаются в маске блока Drive. Щелкните Применить или ОК , чтобы подтвердить их.
Бездатчиковая вкладка
- K1 — Матрица усиления наблюдателя K1
-
Усиление по оси d матрицы усиления наблюдателя.
По умолчанию
3000. - K2 — Матрица усиления наблюдателя K2
-
Усиление по оси q матрицы усиления наблюдателя.
По умолчанию
-49500.
Блок входов и выходов
-
SP -
Уставка скорости или крутящего момента. Уставка скорости может быть ступенчатой, но скорость изменения скорости будет соответствовать рампе ускорения / замедления. Если момент нагрузки и скорость имеют противоположные знаки, ускоряющий момент будет суммой электромагнитного момента и момента нагрузки.
-
TmилиWm -
Механический вход: момент нагрузки (Tm) или скорость двигателя (Wm). Для механического вращающегося порта (S) этот ввод удаляется.
-
A, B, C -
Трехфазные клеммы моторного привода.
-
Wm,TeилиS -
Механическая мощность: скорость двигателя (Wm), электромагнитный момент (Te) или механический порт вращения (S).
Когда для параметра Режим выходной шины установлено значение Несколько выходных шин , блок имеет следующие три выходные шины:
-
Двигатель -
Вектор измерения двигателя. Этот вектор позволяет вам наблюдать переменные двигателя с помощью блока Bus Selector.
-
Conv -
Вектор измерения трехфазных преобразователей. Этот вектор содержит:
Все значения тока и напряжения мостов могут быть визуализированы с помощью блока мультиметра.
-
Ctrl -
Вектор измерения контроллера. Этот вектор содержит:
Когда для параметра Output bus mode установлено значение Single output bus , блок группирует выходы Motor, Conv и Ctrl в один выход шины.
Технические характеристики моделиБиблиотека содержит набор параметров привода мощностью 3 л.с. Технические характеристики привода мощностью 3 л.с. показаны в следующей таблице.
Технические характеристики привода 3 л.с.
| Входное напряжение привода | ||
|---|---|---|
| Амплитуда6 6 9038 9038 90389038 9038 9038 9038 Частота | 60 Гц | |
| Номинальные значения двигателя | ||
| Мощность | 3 л.с. 6 | |
| Напряжение | 300 В постоянного тока |
Примеры
Пример ac7_example иллюстрирует моделирование привода двигателя AC7 при стандартных условиях нагрузки.
Ссылки
[1] Бозе, Б. К. Современная силовая электроника и приводы переменного тока . Верхняя Сэдл Ривер, Нью-Джерси: Прентис-Холл, 2002.
[2] Краузе П. К. Анализ электрических машин . Нью-Йорк: McGraw-Hill, 1986.
[3] Tremblay, O. Моделирование, моделирование и управление машинной синхронизацией для прицеливания в силовую контрэлектромеханическую ловушку . Монреаль, Канада: École de Technologie Supérieure, 2006.
Введен в R2007a
Шунтирующие двигатели постоянного тока: где они используются?
Конструкция двигателя постоянного токаИзображение предоставлено: electric4u.com
В электрической терминологии параллельная цепь часто называется шунтом. Следовательно, двигатели постоянного тока, в которых якорь и обмотки возбуждения соединены параллельно, называются параллельными двигателями постоянного тока. Различия в конструкции между двигателями постоянного тока с последовательной обмоткой и параллельными двигателями постоянного тока приводят к некоторым различиям в работе этих двух типов, но наиболее существенное различие заключается в их скоростных характеристиках. Если двигатель постоянного тока с последовательной обмоткой демонстрирует прямую обратную зависимость между нагрузкой и скоростью, параллельный двигатель постоянного тока может поддерживать постоянную скорость независимо от нагрузки на двигатель.
Параллельная и последовательная обмотки
В двигателе постоянного тока с последовательной обмоткой обмотки якоря и обмотки возбуждения соединены последовательно, и ток через них равен (I всего = I a = I f ). Поскольку обмотки якоря и обмотки возбуждения шунтирующего двигателя постоянного тока соединены параллельно, ток в параллельном двигателе делится на две части: ток через якорь и ток через обмотки возбуждения, а общий ток является суммой двух частей. .
В шунтирующем двигателе постоянного тока обмотки якоря и возбуждения (шунтирующие) соединены параллельно. Параллельная цепь также известна как шунтирующая цепь; таким образом, используется термин «шунтирующий двигатель».Изображение предоставлено: National Instruments Corporation
Где:
I итого = ток питания
I a = ток через обмотки якоря
I sh = ток через шунтирующие (полевые) обмотки
Шунтирующие (полевые) обмотки шунтирующего двигателя постоянного тока сделаны из провода меньшего сечения, но у них намного больше витков, чем у двигателя постоянного тока с последовательной обмоткой.Большое количество витков позволяет создавать сильное магнитное поле, но провода меньшего сечения обеспечивают высокое сопротивление и ограничивают ток, протекающий через шунтирующую катушку. Следовательно, пусковой момент параллельного двигателя постоянного тока низкий, а это означает, что нагрузка на вал при запуске должна быть небольшой.
В параллельном двигателе постоянного тока крутящий момент пропорционален току якоря (как показано в уравнении крутящего момента ниже). Напротив, для двигателя постоянного тока с последовательной обмоткой крутящий момент увеличивается как квадратов тока якоря.Эта экспоненциальная зависимость крутящего момента от тока позволяет двигателям постоянного тока с последовательной обмоткой обеспечивать высокий пусковой момент и выдерживать высокие пусковые нагрузки.
Как параллельные двигатели постоянного тока достигают регулирования скорости
Когда напряжение подается на шунтирующий двигатель постоянного тока, якорь потребляет ток, достаточный для создания сильного магнитного поля, которое взаимодействует с магнитным полем, создаваемым шунтирующими обмотками, заставляя якорь вращаться. Вращающийся якорь (он же ротор) производит обратную ЭДС, которая противодействует напряжению якоря и снижает ток якоря.Если нагрузка на двигатель увеличивается, вращение якоря замедляется и уменьшается обратная ЭДС, так как обратная ЭДС пропорциональна скорости.
Где:
E b = задняя ЭДС
Φ = поток
P = количество полюсов
Z = количество витков
N = частота вращения
При меньшем напряжении обратной ЭДС и постоянном напряжении питания (E) напряжение сети увеличивается.
Увеличение сетевого напряжения приводит к увеличению тока якоря.Поскольку крутящий момент пропорционален току якоря, крутящий момент также увеличивается.
Где:
T = крутящий момент
A = площадь
Наконец, этот увеличенный крутящий момент позволяет двигателю увеличить скорость и компенсировать замедление из-за нагрузки. Следовательно, шунтирующий двигатель постоянного тока может саморегулировать свою скорость и может называться двигателем с постоянной скоростью.
Когда к шунтирующему двигателю постоянного тока прикладывается нагрузка, его скорость уменьшается, но двигатель может саморегулироваться и быстро компенсировать потерю скорости.Изображение предоставлено: electric4u.com
Используется для параллельных двигателей постоянного тока
Благодаря возможности саморегулирования скорости, параллельные двигатели постоянного тока идеально подходят для применений, где требуется точное управление скоростью. Однако имейте в виду, что они не могут обеспечить высокий пусковой крутящий момент, поэтому нагрузка при запуске должна быть небольшой. Области применения, которые соответствуют этим критериям и подходят для шунтирующих двигателей постоянного тока, включают станки, такие как токарные и шлифовальные станки, и промышленное оборудование, такое как вентиляторы и компрессоры.
.