Какие основные различия между синхронными и асинхронными электродвигателями. Как устроены и работают эти типы двигателей. Где применяются синхронные и асинхронные двигатели. Каковы преимущества и недостатки каждого типа.
Принципиальные отличия синхронных и асинхронных электродвигателей
Синхронные и асинхронные двигатели являются двумя основными типами электродвигателей переменного тока. Несмотря на схожий внешний вид, они имеют ряд существенных отличий в конструкции и принципе работы:
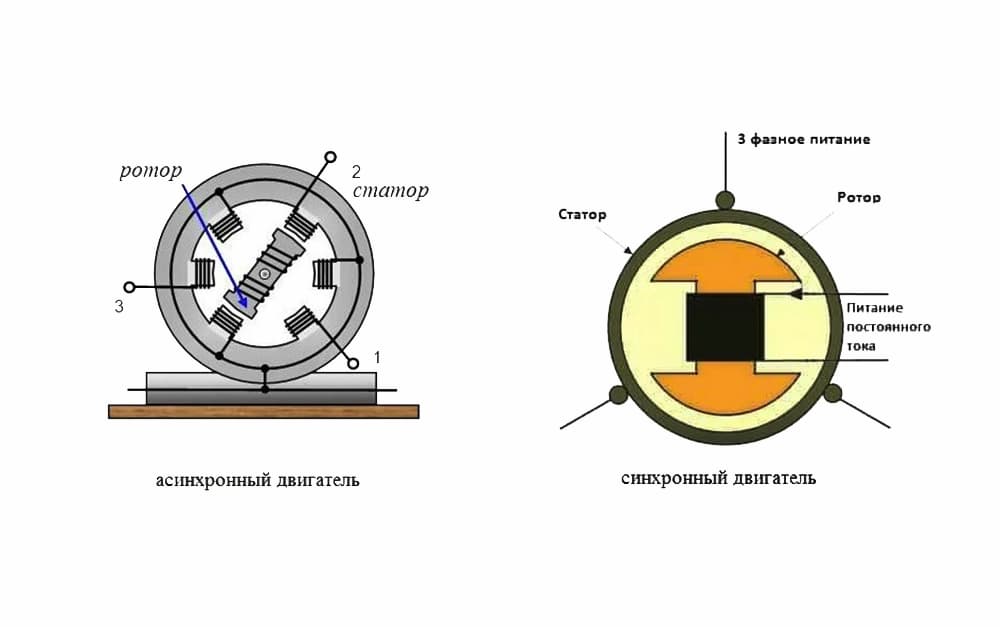
- Устройство ротора: у синхронных двигателей на роторе расположена обмотка возбуждения с независимым питанием постоянным током, у асинхронных — короткозамкнутая обмотка без внешнего питания.
- Скорость вращения: ротор синхронного двигателя вращается синхронно с магнитным полем статора, у асинхронного — с небольшим отставанием (скольжением).
- Пусковые свойства: синхронные двигатели не имеют пускового момента и требуют специальных методов запуска, асинхронные запускаются самостоятельно.
- Регулировка скорости: у синхронных двигателей скорость постоянна, у асинхронных — зависит от нагрузки.
Конструкция и принцип действия синхронного электродвигателя
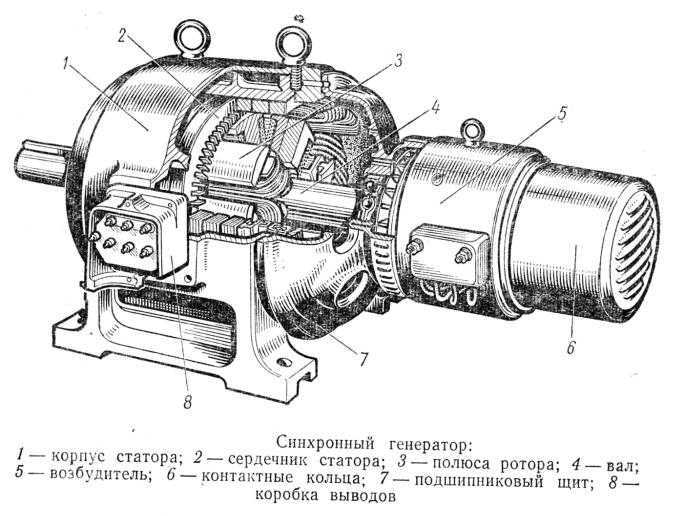
Синхронный двигатель состоит из следующих основных частей:

- Статор с трехфазной обмоткой, создающей вращающееся магнитное поле
- Ротор с обмоткой возбуждения, питаемой постоянным током
- Контактные кольца для подачи постоянного тока на обмотку ротора
- Пусковая обмотка (короткозамкнутая клетка) на роторе для асинхронного пуска
Принцип действия синхронного двигателя основан на взаимодействии вращающегося магнитного поля статора и поля ротора. Благодаря независимому возбуждению ротор «захватывается» полем статора и вращается с ним синхронно.
Особенности работы и применения асинхронных электродвигателей
Асинхронный двигатель имеет более простую и надежную конструкцию:
- Статор с трехфазной обмоткой аналогичен статору синхронного двигателя
- Ротор выполнен в виде «беличьей клетки» — короткозамкнутых проводящих стержней
- Отсутствуют контактные кольца и система возбуждения
Вращающееся магнитное поле статора наводит токи в обмотке ротора, создавая вращающий момент. Ротор вращается с небольшим отставанием от поля статора. Это обеспечивает простоту конструкции и хорошие пусковые свойства.
Сравнение эффективности синхронных и асинхронных двигателей
При выборе типа электродвигателя важно учитывать следующие факторы:
- КПД: синхронные двигатели имеют более высокий КПД, особенно при больших мощностях
- Коэффициент мощности: синхронные двигатели могут работать с опережающим коэффициентом мощности
- Постоянство скорости: синхронные двигатели обеспечивают строго постоянную скорость вращения
- Пусковые свойства: асинхронные двигатели проще в запуске и управлении
- Стоимость: асинхронные двигатели дешевле в производстве и эксплуатации
Области применения синхронных электродвигателей
Синхронные двигатели наиболее эффективны в следующих случаях:
- Привод мощных (от сотен кВт) низкоскоростных механизмов
- Оборудование, требующее точного поддержания скорости (прокатные станы, бумагоделательные машины)
- Компенсация реактивной мощности в электрических сетях
- Высокоскоростные приводы в составе частотно-регулируемых систем
Преимущества использования асинхронных двигателей
Асинхронные двигатели широко применяются благодаря следующим достоинствам:

- Простота и надежность конструкции
- Низкая стоимость производства и обслуживания
- Хорошие пусковые характеристики
- Возможность работы напрямую от сети без преобразователей
- Широкий диапазон мощностей и скоростей вращения
Это делает их оптимальным выбором для большинства общепромышленных применений средней мощности.
Современные тенденции в развитии электродвигателей
В настоящее время наблюдаются следующие тренды в совершенствовании электродвигателей:
- Повышение энергоэффективности за счет применения новых материалов
- Разработка гибридных конструкций, сочетающих преимущества разных типов
- Внедрение систем частотного регулирования для асинхронных двигателей
- Создание синхронных двигателей с постоянными магнитами
- Применение современных методов компьютерного моделирования при проектировании
Эти инновации позволяют расширить области применения электродвигателей и повысить эффективность электропривода в различных отраслях.
Электродвигатели, их классификация
Электрический двигатель — электрическая машина (электромеханический преобразователь), в которой электрическая энергия преобразуется в механическую.
В зависимости от назначения, от предполагаемых режимов и условий работы, от типа питания и т. д., все электродвигатели можно классифицировать по нескольким параметрам: по принципу получения рабочего момента, по способу работы, по роду тока питания, по способу управления фазами, по типу возбуждения и т. д. Давайте же рассмотрим классификацию электродвигателей более подробно.
Возникновение вращающего момента
Вращающий момент в электродвигателях может быть получен одним из двух способов: по принципу магнитного гистерезиса либо чисто магнитоэлектрически. Гистерезисный двигатель получает вращающий момент посредством явления гистерезиса во время перемагничивания магнитно-твердого ротора, в то время как у магнитоэлектрического двигателя вращающий момент является результатом взаимодействия явных магнитных полюсов ротора и статора.
Магнитоэлектрические двигатели по праву составляют сегодня львиную долю всего обилия электродвигателей, применяемых в очень многих областях. Они подразделяются по роду питающего тока на:
- двигатели постоянного тока,
- двигатели переменного тока,
- универсальные двигатели.
В отличие от магнитоэлектрического двигателя, в гистерезисном двигателе допускается перемещение намагниченности ротора относительно его геометрических осей, и именно данная особенность не позволяет распространять на синхронный режим работы гистерезисного двигателя общие закономерности магнитоэлектрического преобразования.
Классификация электродвигателей
Двигатели постоянного тока
У двигателя, который питается постоянным током, за переключение фаз отвечает сам двигатель. Это значит, что хотя на электрическую машину и подается постоянный ток, тем не менее, благодаря действию внутренних механизмов устройства, магнитное поле оказывается движущимся и становится в состоянии поддерживать вращающий момент ротора (как будто в обмотке статора действует переменный ток).
Устройство и приницип работы электродвигателя постоянного тока: 1 — якорь, 2 — вал, 3 — коллекторные пластины, 4 — щеточный узел, 5 — магнитопровод якоря, 6 — магнитопровод индуктора, 7 — обмотки возбуждения, 8 — корпус индуктора, 9 — боковые крышки, 10 — вентилятор, 11 — лапы, 12 — подшипники.
Электродвигатель постоянного тока состоит из неподвижной части, называемой индуктором, и подвижной части, называемой якорем. В зависимости от исполнения, место обмотки возбуждения на индукторе могут располагаться постоянные магниты, что позволяет упростить конструкцию, но не позволяет регулировать магнитный поток двигателя, влияющий на его скорость.
По способу создания движущегося магнитного поля, двигатели постоянного тока подразделяются на:
- вентильные (бесколлекторные),
- коллекторные.
Бесколлекторные двигатели имеют в своей конструкции электронные инверторы, которые и осуществляют переключение фаз. Коллекторные же двигатели традиционно оснащены щеточно-коллекторными узлами, которые призваны чисто механически синхронизировать питание обмоток двигателя с вращением его движущихся частей.
Коллекторные же двигатели традиционно оснащены щеточно-коллекторными узлами, которые призваны чисто механически синхронизировать питание обмоток двигателя с вращением его движущихся частей.
Возбуждение коллекторных двигателей
Коллекторные двигатели по способу возбуждения бывают следующих видов: с независимым возбуждением от постоянных магнитов или от электромагнитов, либо с самовозбуждением. Двигатели с возбуждением от постоянных магнитов содержат магниты на роторе. Двигатели с самовозбуждением имеют на роторе специальную якорную обмотку, которая может быть включена параллельно, последовательно или смешано со специальной обмоткой возбуждения.
Двигатель пульсирующего тока
На двигатель постоянного тока похож двигатель пульсирующего тока. Отличие заключается в наличии шихтованных вставок на остове, а также дополнительных шихтованных полюсов. Кроме того, у двигателя пульсирующего тока имеется компенсационная обмотка. Применение такие двигатели находит в электровозах, где они обычно питается выпрямленным переменным током.
Двигатель переменного тока
Двигатели переменного тока, как ясно из названия, питаются током переменным. Бывают они синхронными и асинхронными.
У синхронных двигателей переменного тока магнитное поле статора движется с той же угловой скоростью, что и ротор, а у асинхронных всегда есть некое отставание (характеризующееся величиной скольжения s) — магнитное поле статора в своем движении как бы опережает ротор, который в свою очередь все время стремится его догнать.
Синхронные двигатели больших мощностей (мощностью в сотни киловатт) имеют на роторе обмотки возбуждения. Роторы менее мощных синхронных двигателей оснащены постоянными магнитами, которые и образуют полюса. Гистерезисные двигатели тоже в принципе относятся к синхронным.
Шаговые двигатели — это особая категория синхронных двигателей с высокой точностью управления скоростью вращения, вплоть до дискретного счета шагов.
Вентильные синхронные реактивные двигатели получают питание через инвертор.
Асинхронные двигатели переменного тока отличаются тем, что у них угловая скорость вращения ротора всегда меньше чем угловая скорость вращения магнитного поля статора. Асинхронные двигатели бывают однофазными (с пусковой обмоткой), двухфазными (к ним относится и конденсаторный двигатель), трехфазными и многофазными.
Конструкция трехфазного асинхронного электродвигателя с короткозамкнутым ротором
Асинхронный электродвигатель состоит и неподвижной (статора) части и подвижной (ротора) частей, которые удерживаются подшипниками 1 и 11, установленными в боковые крышки 3 и 9. Ротор состоит из вала 2, на котором закреплен магнитопровод 5 с обмоткой. Статор двигателя состоит из корпуса 7, к которому прикреплен магнитопровод 6. В пазы магнитопровода уложена трехфазная обмотка 8. Так же к корпусу крепится крышка клеммной коробки 4 и защитный кожух 12 крыльчатки 10.
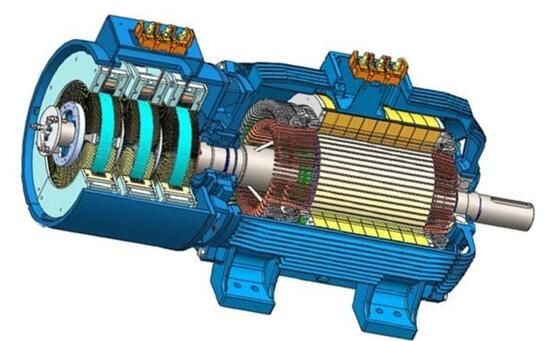
Фазный ротор имеет трехфазную обмотку, выполненную по типу обмотки статора. Одни концы катушек соединены в нулевую точку («звезда»), а другие – подключены к контактным кольцам. На кольца наложены щетки, осуществляющие скользящий контакт с обмоткой ротора. При такой конструкции возможно подсоединение к обмотке ротора пускового или регулировочного реостата, позволяющего менять электрическое сопротивление в цепи ротора.
Одни концы катушек соединены в нулевую точку («звезда»), а другие – подключены к контактным кольцам. На кольца наложены щетки, осуществляющие скользящий контакт с обмоткой ротора. При такой конструкции возможно подсоединение к обмотке ротора пускового или регулировочного реостата, позволяющего менять электрическое сопротивление в цепи ротора.
Асинхронный двигатель с частотным преобразователем для плавного регулирования скороcти вращения вала за счет изменения частоты и питающего напряжения:
Универсальные коллекторные двигатели
Универсальный коллекторнй двигатель может работать хоть от постоянного, хоть от переменного тока (50 Гц). Имеет последовательное возбуждение, используется в бытовых электроприборах, где требуется скорость вращения более высокая чем максимальные для обычных двигателей переменного тока 3000 об/мин. Как правило, мощность таких двигателей не превышает 200 Вт. Встречается тиристорное управление скоростью вращения универсального двигателя.
Усовершенствованная разновидность универсального двигателя — синхронный двигатель с датчиком положения ротора, где роль коллектора выполняет электронный инвертор.
Ранее ЭлектроВести писали, что компания Renault готовит полностью электрическую версию своего маленького хетчбэка – Renault Twingo ZE. Новинка появится уже в этом году.
По материалам: electrik.info.
Синхронный и асинхронный двигатель. Что такое синхронный двигатель
Синхронный двигатель, в отличии от своего асинхронного собрата, имеет постоянную частоту вращения при разнообразных нагрузках. Часто такие приборы применяют для приводов машин, которые работают с постоянной неизменной скоростью (например, компрессоры, вентиляторы, насосы и прочее).
Как устроен синхронный двигатель?
В статоре такого электроприбора имеется обмотка, которая подключается к сетям трехфазного тока. Она образует собой магнитное поле, которое вращается. Ротор у такой электроэнергетической машины, как синхронный двигатель, состоит из сердечника и обмотки возбуждения.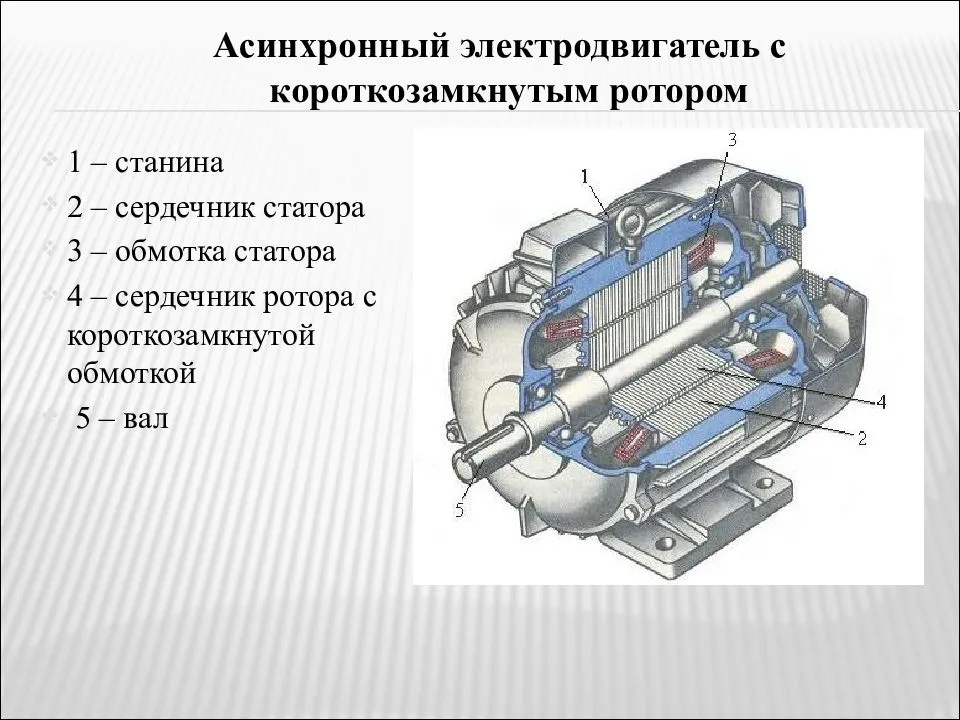 Обмотка подключается через специальные контактные кольца к источнику (обычно это источник постоянного тока или же иногда используют выпрямленный переменный ток). Электрический ток, который протекает через обмотки возбуждения, создает намагничивающее ротор магнитное поле. Синхронная машина (а двигатель довольно просто переделать в генератор, так как двигатель преобразует электрическую энергию в механическую, а генератор — наоборот, механическую в электроэнергию) обычно работает на переменном токе. На сегодняшний день есть разработки такого устройства, как синхронный двигатель переменного тока. Однако в большинстве случаев для его собственных нужд используют аккумуляторные батареи переменного тока, благодаря которым постоянный ток выпрямляется специальными приборами до состояния, аналогичного постоянному (то есть неизменному во времени значению).
Обмотка подключается через специальные контактные кольца к источнику (обычно это источник постоянного тока или же иногда используют выпрямленный переменный ток). Электрический ток, который протекает через обмотки возбуждения, создает намагничивающее ротор магнитное поле. Синхронная машина (а двигатель довольно просто переделать в генератор, так как двигатель преобразует электрическую энергию в механическую, а генератор — наоборот, механическую в электроэнергию) обычно работает на переменном токе. На сегодняшний день есть разработки такого устройства, как синхронный двигатель переменного тока. Однако в большинстве случаев для его собственных нужд используют аккумуляторные батареи переменного тока, благодаря которым постоянный ток выпрямляется специальными приборами до состояния, аналогичного постоянному (то есть неизменному во времени значению).
Синхронный двигатель и его разновидности
В основном все отличия в конструктивном исполнении такого устройства — это модификации вращающейся детали. Ротор синхронной машины может быть с явно выраженными полюсами (его обычно называют «явнополюсный»), и с неявно выраженными полюсами (так называемый «неявнополюсный»). Явнополюсный ротор обычно имеет ярко выраженные, выступающие полюса, на которых размещаются катушки возбуждения. Неявнополюсный ротор обычно представляет собой цилиндр из ферромагнитного сплава, на поверхности которого фрезеруют пазы в осевом направлении. Впоследствии именно в эти пазы укладывают обмотки возбуждения.
Ротор синхронной машины может быть с явно выраженными полюсами (его обычно называют «явнополюсный»), и с неявно выраженными полюсами (так называемый «неявнополюсный»). Явнополюсный ротор обычно имеет ярко выраженные, выступающие полюса, на которых размещаются катушки возбуждения. Неявнополюсный ротор обычно представляет собой цилиндр из ферромагнитного сплава, на поверхности которого фрезеруют пазы в осевом направлении. Впоследствии именно в эти пазы укладывают обмотки возбуждения.
Синхронный двигатель и принцип его работы
Магнитное поле статора, которое вращается, намагничивает ротор. Синхронный двигатель с постоянными магнитами имеет разное электромагнитное сопротивление по поперечной и продольной осям полюсов. Силовые линии у магнитного поля обмотки статора начнут изгибаться, потому что они будут как бы стремиться найти пути с наименьшим сопротивлением. Вследствии специфических свойств силовых магнитных линий поля, в свою очередь, такая деформация его вызовет реактивный момент. Именно поэтому ротор будет вращаться синхронно вместе с магнитным полем статора.
Именно поэтому ротор будет вращаться синхронно вместе с магнитным полем статора.
Синхронный двигатель и его особенности
Нельзя не упомянуть о некоторых специфических моментах. Например, о том, что у таких машин нет пускового момента. Это происходит по той причине, что из-за своей инертности ротор просто не успевает развить нужное количество оборотов. Поэтому в настоящее время часто применяют асинхронный пуск таких двигателей.
В данной статье рассмотрим принципиальные отличия синхронных электродвигателей от асинхронных, чтобы каждый читающий эти строки мог бы эти различия четко понимать.
Асинхронные электродвигатели более широко распространены сегодня, однако в некоторых ситуациях синхронные двигатели оказываются более подходящими, более эффективными для решения конкретных промышленных и производственных задач, об этом будет рассказано далее.
Прежде всего давайте вспомним, что же вообще такое электродвигатель. называется электрическая машина, предназначенная для преобразования электрической энергии в механическую энергию вращения ротора, и служащая в качестве привода для какого-нибудь механизма, например для приведения в действие подъемного крана или насоса.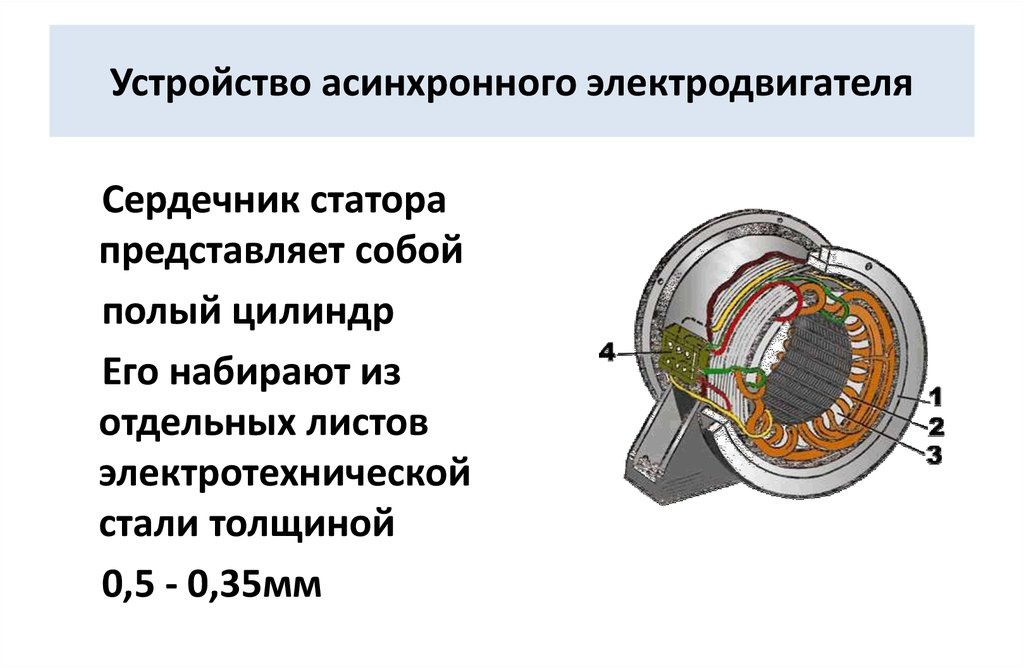
Еще в школе всем рассказывали и показывали, как два магнита отталкиваются одноименными полюсами, а разноименными — притягиваются. Это . Но существуют и переменные магниты. Каждый помнит рисунок с проводящей рамкой, расположенной между полюсами подковообразного постоянного магнита.
Горизонтально расположенная рамка, если по ней пустить постоянный ток, станет поворачиваться в магнитном поле постоянного магнита под действием пары сил (Сила Ампера), пока не будет достигнуто равновесие в вертикальном положении.
Если затем по рамке пустить постоянный ток противоположного направления, то рамка повернется дальше. В результате такого попеременного питания рамки постоянным током то одного, то другого направления, достигается непрерывное вращение рамки. Рамка здесь представляет собой аналог переменного магнита.
Приведенный пример с вращающейся рамкой в простейшей форме демонстрирует принцип работы синхронного электродвигателя. У любого синхронного электродвигателя на роторе есть обмотки возбуждения, на которые подается постоянный ток, формирующий магнитное поле ротора. Статор же синхронного электродвигателя содержит обмотку статора, для формирования магнитного поля статора.
Статор же синхронного электродвигателя содержит обмотку статора, для формирования магнитного поля статора.
При подаче на обмотку статора переменного тока, ротор придет во вращение с частотой, соответствующей частоте тока в обмотке статора. Частота вращения ротора будет синхронна частоте тока обмотки статора, поэтому такой электродвигатель называется синхронным. Магнитное поле ротора создается током, а не индуцируется полем статора, поэтому синхронный двигатель способен держать синхронные номинальные обороты независимо от мощности нагрузки, разумеется, в разумных пределах.
Асинхронный электродвигатель в свою очередь отличается от синхронного. Если вспомнить рисунок в рамкой, и рамку просто накоротко замкнуть, то при вращении магнита вокруг рамки, индуцируемый в рамке ток создаст магнитное поле рамки, и рамка будет стремиться догнать магнит.
Частота вращения рамки под механической нагрузкой будет всегда меньше частоты вращения магнита, и частота не будет поэтому синхронной. Этот простой пример демонстрирует принцип действия асинхронного электродвигателя.
Этот простой пример демонстрирует принцип действия асинхронного электродвигателя.
В асинхронном электродвигателе вращающееся магнитное поле формируется переменным током обмотки статора, расположенной в его пазах. Ротор типичного асинхронного двигателя обмоток как таковых не имеет, вместо этого на нем расположены накоротко соединенные стержни (ротор типа «беличья клетка»), такой ротор называется короткозамкнутым ротором. Бывают еще асинхронные двигатели с фазным ротором, там ротор содержит обмотки, сопротивление и ток в которых можно регулировать реостатом.
Итак, в чем же принципиальное отличие асинхронного электродвигателя от синхронного? С виду внешне они похожи, порой даже специалист не отличит по внешним признакам синхронный электродвигатель от асинхронного. Главное же отличие заключается в устройстве роторов. Ротор асинхронного электродвигателя не питается током, а полюса на нем индуцирутся магнитным полем статора.
Ротор синхронного двигателя имеет обмотку возбуждения с независимым питанием. Статоры синхронного и асинхронного двигателя устроены одинаково, функция в каждом случае одна и та же — создание вращающегося магнитного поля статора.
Статоры синхронного и асинхронного двигателя устроены одинаково, функция в каждом случае одна и та же — создание вращающегося магнитного поля статора.
Обороты асинхронного двигателя под нагрузкой всегда на величину скольжения отстают от вращения магнитного поля статора, в то время как обороты синхронного двигателя равны по частоте «оборотам» магнитного поля статора, поэтому если обороты должны быть постоянными при различных нагрузках, предпочтительней выбирать синхронный двигатель, например в приводе гильотинных ножниц лучше всего справится со своей задачей мощный синхронный двигатель.
Область применения асинхронных двигателей сегодня очень широка. Это всевозможные станки, транспортеры, вентиляторы, насосы, — все то оборудование, где нагрузка сравнительно стабильна, или снижение оборотов под нагрузкой не критично для рабочего процесса.
Некоторые компрессоры и насосы требуют постоянной частоты вращения при любой нагрузке, на такое оборудование ставят синхронные электродвигатели.
Синхронные двигатели дороже в производстве, чем асинхронные, поэтому если есть возможность выбора и небольшое снижение оборотов под нагрузкой не критично, приобретают асинхронный двигатель.
В целом, электрический двигатель представляет собой электромеханическое устройство, которое преобразовывает электрическую энергию в механическую.
По типу подключения двигатели бывают однофазные и 3-х фазные. Среди 3-х фазных двигателей наиболее распространенными являются индукционные (асинхронные) и синхронные электродвигатели.
Когда в 3-х фазном двигателе электрические проводники располагаются в определенном геометрическом положении (под определенным углом относительно друг друга), возникает электрическое поле. Образованное электромагнитное поле вращается с определенной скоростью, которая называется синхронной скоростью.
Если в этом вращающемся магнитном поле присутствует электромагнит, он магнетически замыкается с этим вращающимся полем и вращается со скоростью этого поля.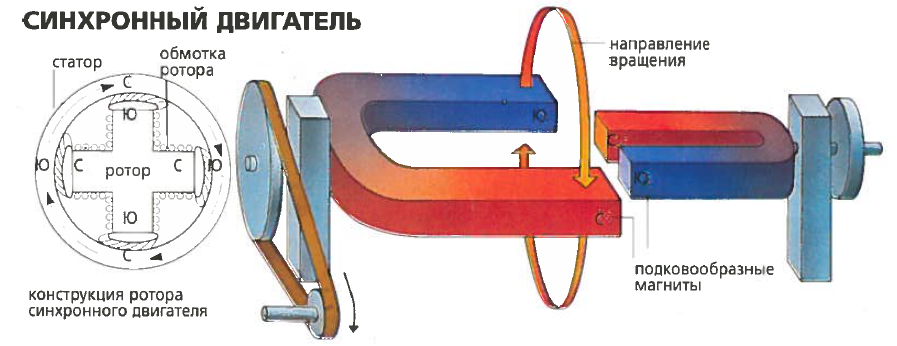 Фактически, это нерегулируемый двигатель, поскольку он имеет всего одну скорость, которая является синхронной, и никаких промежуточных скоростей там быть не может. Другими словами, он работает синхронно с частотой сети. Ниже дана формула синхронной скорости:
Фактически, это нерегулируемый двигатель, поскольку он имеет всего одну скорость, которая является синхронной, и никаких промежуточных скоростей там быть не может. Другими словами, он работает синхронно с частотой сети. Ниже дана формула синхронной скорости:
В принципе, его строение практически аналогично 3-фазному асинхронному двигателю, за исключением того факта, что на ротор подается источник постоянного тока (в этом мы разберёмся позже). А пока рассмотрим основное строение данного типа двигателя.
На рисунке показано устройство этого типа двигателя. На статор подается 3-х фазное напряжение, а на ротор – источник постоянного тока.
Основные свойства синхронных двигателей:
- Синхронные электродвигатели не являются самозапускающимся механизмом. Они требуют определенного внешнего воздействия, чтобы выработать определенную синхронную скорость.
- Двигатель работает синхронно с частотой электрической сети. Поэтому при обеспечении бесперебойного снабжения частоты он ведет себя так, как двигатель с постоянной скоростью.

- Этот двигатель имеет уникальные характеристики, функционируя под любым коэффициентом мощности. Поэтому они используются для увеличения фактора силы.
Видео: Строение и принцип работы синхронного двигателя
Принципы работы синхронного двигателя
Электронно-магнитное поле синхронного двигателя обеспечивается двумя электрическими вводами. Это обмотка статора, которая состоит из 3-х фаз и предусматривает 3 фазы источника питания и ротор, на который подается постоянный ток.
3 фазы обмотки статора обеспечивают вращение магнитного потока. Ротор принимает постоянный ток и производит постоянный поток. При частоте 50 Гц 3-х фазный поток вращается около 3000 оборотов в 1 минуту или 50 оборотов в 1 секунду. В определенный момент полюса ротора и статора могут быть одной полярности (++ или – –), что вызывает отталкивания ротора. После этого полярность сразу же меняется (+–), что вызывает притягивание.
Но ротор по причине своей инерции не в состоянии вращаться в любом направлении из-за силы притяжения или силы отталкивания и не может оставаться в состоянии простоя.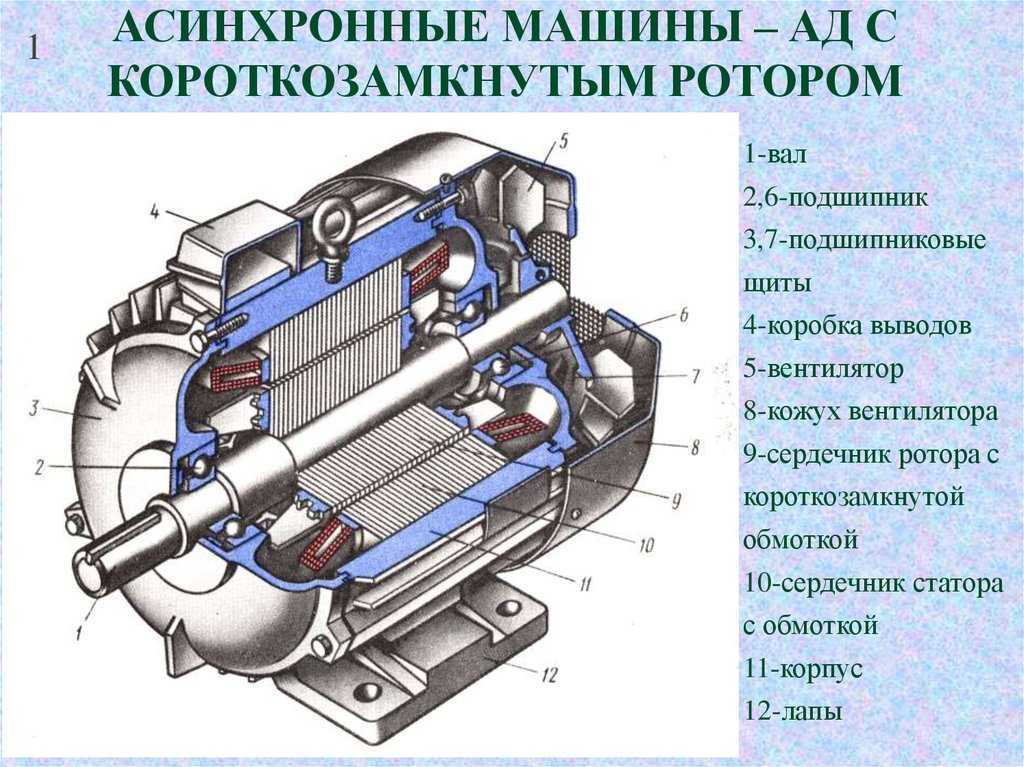 Он не самозапускающийся.
Он не самозапускающийся.
Чтобы преодолеть инерцию силы, необходимо определенное механическое воздействие, которое вращает ротор в том же направлении, что и магнитное поле, обеспечивая необходимую синхронную скорость. Через некоторое время происходит замыкание магнитного поля, и синхронный двигатель вращается с определенной скоростью.
Способы запуска
- Пуск синхронного двигателя при помощи вспомогательного двигателя. Синхронный двигатель механически соединяется с другим двигателем. Это может быть либо 3-х фазный индукционный двигатель, либо двигатель постоянного тока. Постоянный ток изначально не подается. Двигатель начинает вращаться со скоростью, близкой к синхронной скорости, после чего подается постоянный ток. После того, как магнитное поле замыкается, связь со вспомогательного двигателя прекращается.
- Асинхронный пуск. В полюсных наконечниках полюсов ротора устанавливается дополнительная короткозамкнутая обмотка. При включении напряжения в обмотку статора возникает вращающееся магнитное поле.
 Пересекая короткозамкнутую обмотку, которая заложена в полюсных наконечниках ротора, это вращающееся магнитное поле индуцирует в ней токи, который взаимодействуя с вращающимся полем статора, приводят ротор во вращение. Когда достигнута синхронная скорость, ЭДС и крутящийся момент уменьшается. И наконец, когда магнитное поле замыкается, крутящий момент также сводится к нулю. Таким образом, синхронность вначале запускается индукционным двигателем с использованием дополнительной обмотки.
Пересекая короткозамкнутую обмотку, которая заложена в полюсных наконечниках ротора, это вращающееся магнитное поле индуцирует в ней токи, который взаимодействуя с вращающимся полем статора, приводят ротор во вращение. Когда достигнута синхронная скорость, ЭДС и крутящийся момент уменьшается. И наконец, когда магнитное поле замыкается, крутящий момент также сводится к нулю. Таким образом, синхронность вначале запускается индукционным двигателем с использованием дополнительной обмотки.
Применение
- Синхронный двигатель используется для улучшения коэффициента мощности. Синхронные двигатели широко применяются в энергосистеме, поскольку они работают при любом коэффициенте мощности и имеют экономичные эксплуатационные показатели.
- Синхронные двигатели находят свое применение там, где рабочая скорость не превышает 500 об / мин и требуется увеличить мощность. Для энергетической потребности от 35 кВт до 2500 кВт, стоимость, размер, вес и соответствующего индукционного двигателя будет довольно высоким.
 Такие двигатели часто используются для работы поршневых насосов, компрессоров, прокатных станков и другого оборудования.
Такие двигатели часто используются для работы поршневых насосов, компрессоров, прокатных станков и другого оборудования.
Особенностью работы двигателя является равенство скорости вращения ротора и скорости вращения магнитного потока. Поэтому скорость вала двигателя не зависит и не изменяется от величины подключаемой нагрузки. Это достигается за счет того, что индуктор синхронного электродвигателя является электромагнитом, в некоторых случаях постоянным магнитом.
Количество пар полюсов ротора одинаково с числом пар полюсов у движущегося магнитного поля. Взаимное воздействие этих полюсов дает возможность выравнивания скорости ротора. На валу в этот момент может быть любая по величине нагрузка. Она не влияет на скорость вращения индуктора.
Конструктивные особенности и принцип работыОсновными составными частями синхронного электродвигателя являются: статор, который неподвижен, и ротор, иными словами называемый индуктором. Статор имеет другое название – якорь, но от этого его суть не меняется.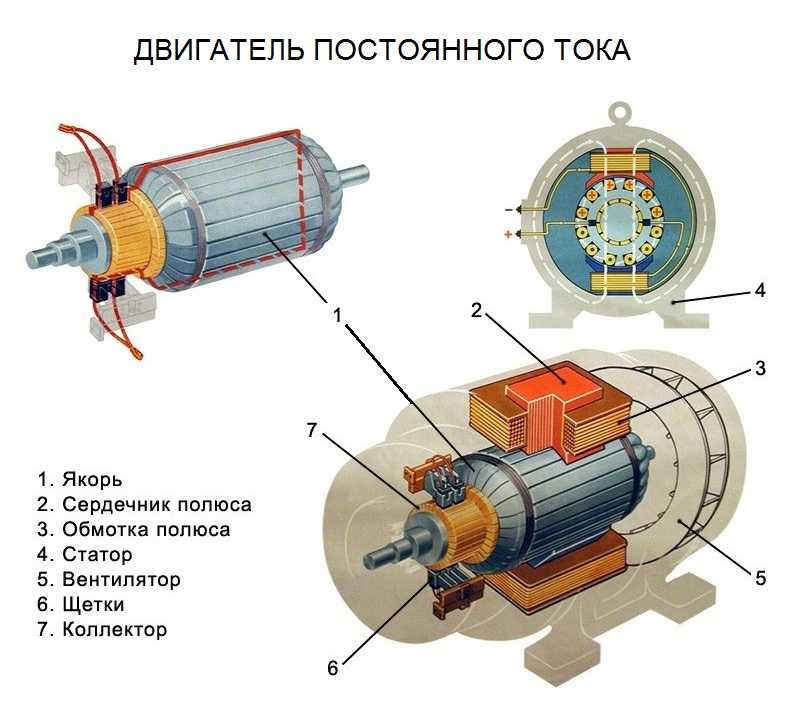 Эти части двигателя разделены прослойкой воздуха. Между пазами заложена трехфазная обмотка, которая чаще всего имеет соединение по .
Эти части двигателя разделены прослойкой воздуха. Между пазами заложена трехфазная обмотка, которая чаще всего имеет соединение по .
Когда двигатель после запуска начал работать, токи якоря образуют движущееся магнитное поле, его вращение дает пересечение поля индуктора. В итоге такой работы двух полей возникает энергия. Магнитное поле статора по своей сути является полем его реакции. В работе генераторов такую энергию получают с помощью индукторов.
Полюсами являются электромагниты статора, работающие на постоянном токе. Статоры синхронных моторов могут выполняться по различным схемам: неявнополюсной, а также явнополюсной. Они отличаются положением полюсов.
Для снижения магнитного сопротивления и оптимизации условий прохода магнитного поля используют сердечники из ферромагнитного материала. Они находятся в роторе и якоре. Производятся они из электротехнической стали, которая содержит большое количество кремния. Это дает возможность снизить вихревые токи и увеличить электрическое сопротивление стали.
Синхронные электродвигатели имеют в своей основе принцип взаимодействия полюсов индуктора и статора. Во время пуска двигатель ускоряется до скорости вращения магнитного потока. Только при таком условии электродвигатель начинает действовать в синхронном режиме. При таком процессе магнитные поля образуют пересечение, возникает вход в синхронизацию.
Долгое время для разгона мотора применяли отдельный пусковой двигатель. Его соединяли механическим путем с синхронным мотором. При запуске ротор мотора ускорялся и достигал синхронной скорости. Далее мотор самостоятельно втягивался в синхронное движение. При выборе мощности пускового мотора руководствовались 15% мощности от номинала разгоняемого двигателя. Этого резерва мощности было достаточно для запуска синхронного двигателя, даже при наличии небольшой нагрузки.
Такой метод разгона более сложный, значительно повышает стоимость оборудования. В современных конструкциях синхронные электродвигатели не имеют такой схемы разгона.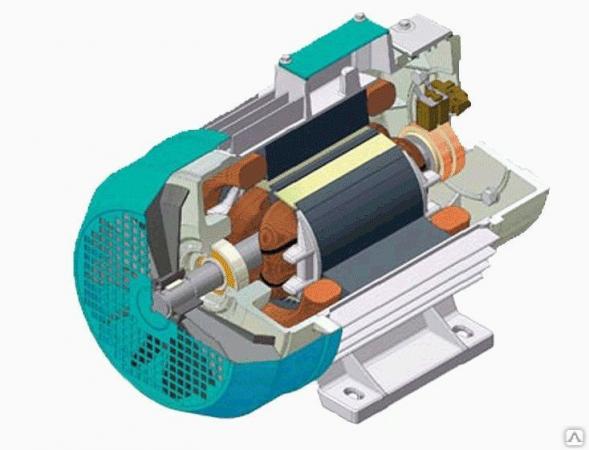 Применяют другую систему разгона. Реостатом замыкают обмотки индуктора по аналогии с асинхронным двигателем. Для запуска на ротор монтируют короткозамкнутую обмотку, являющуюся также и успокоительной обмоткой, которая предотвращает раскачивание ротора при синхронизации.
Применяют другую систему разгона. Реостатом замыкают обмотки индуктора по аналогии с асинхронным двигателем. Для запуска на ротор монтируют короткозамкнутую обмотку, являющуюся также и успокоительной обмоткой, которая предотвращает раскачивание ротора при синхронизации.
При достижении ротором номинальной скорости, к индуктору подключают постоянный ток. Однако, для пуска моторов с постоянными магнитами не обойтись без применения пусковых внешних двигателей.
В криогенных синхронных электродвигателях применяется обращенная конструкция. В ней якорь и индуктор размещены наоборот, индуктор находится на статоре, а якорь расположен на роторе. У таких машин возбуждающие обмотки состоят из сверхпроводимых материалов.
Достоинства и недостаткиСинхронные двигатели имеют основное преимущество по сравнению с асинхронными моторами тот факт, что возбуждение от постоянного тока внешнего источника дает возможность работы при значительной величине коэффициента мощности.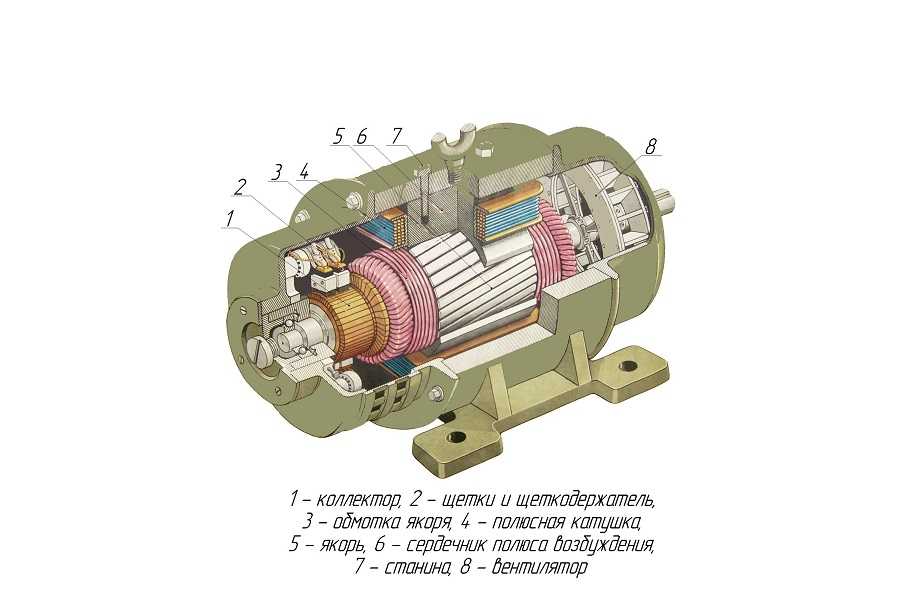 Эта особенность дает возможность увеличить значение коэффициента мощности для общей сети благодаря включению синхронного мотора.
Эта особенность дает возможность увеличить значение коэффициента мощности для общей сети благодаря включению синхронного мотора.
Синхронные электродвигатели имеют и другие достоинства:
- Электродвигатели синхронного типа работают с повышенным коэффициентом мощности, что создает уменьшение расхода энергии и снижает потери. КПД синхронного мотора выше при той же мощности асинхронного двигателя.
- Синхронные электродвигатели имеют момент вращения, который прямо зависит от напряжения сети. Поэтому он при уменьшении напряжения сохраняет свою мощность больше асинхронного. Это является фактором надежности подобных конструкций моторов.
Недостатками являются следующие отрицательные моменты:
- При проведении сравнительного анализа конструкций двух моторов, можно отметить, что синхронные электродвигатели выполнены по более сложной схеме, поэтому их стоимость будет выше.
- Следующим недостатком для синхронных моторов стала необходимость в источнике тока в виде выпрямителя, либо другого блока питания постоянного тока.

- Запуск двигателя происходит по сложной схеме.
- Регулировка скорости вала двигателя возможна только одним способом, с помощью применения частотного преобразователя.
В итоге можно сказать, что все-таки преимущества синхронных двигателей перекрывают недостатки. Поэтому двигатели такого вида широко применяются в технологических процессах, где идет постоянный непрерывный процесс, и не требуется частая остановка и запуск оборудования: на мельничном производстве, в компрессорах, дробилках, насосах и так далее.
Выбор двигателяК вопросу приобретения синхронного электродвигателя нужно подходить, основываясь на следующие факторы:
Условия эксплуатации электродвигателя. По условиям выбирают тип двигателя, который может быть защищенным, открытым или закрытым. А также моторы отличаются по защите токовых частей от влаги, температуры, агрессивных сред. Для взрывоопасного производства существуют специальные защиты, предотвращающие образование искр в двигателе.
Особенности выполнения подключения электродвигателя с потребителем.
Они служат для компенсирования коэффициента мощности в электрической сети и стабилизации номинального значения напряжения в местах подключения нагрузок к двигателю. Нормальным режимом синхронного компенсатора является режим перевозбуждения в момент отдачи в электрическую сеть .
Такие компенсаторы еще называют генераторами реактивной мощности, так как они предназначены для выполнения такой же задачи, как батареи конденсаторов на подстанциях. Когда мощность нагрузок уменьшается, то часто необходимо действие синхронных компенсаторов в невозбужденном режиме при их потреблении реактивной мощности и индуктивного тока, потому что напряжение в сети старается увеличиться, а для его стабилизации на рабочем уровне нужно нагрузить сеть током индуктивности, который вызывает в сети снижение напряжения питания.
Для таких целей синхронные компенсаторы обеспечиваются регулятором автоматического возбуждения.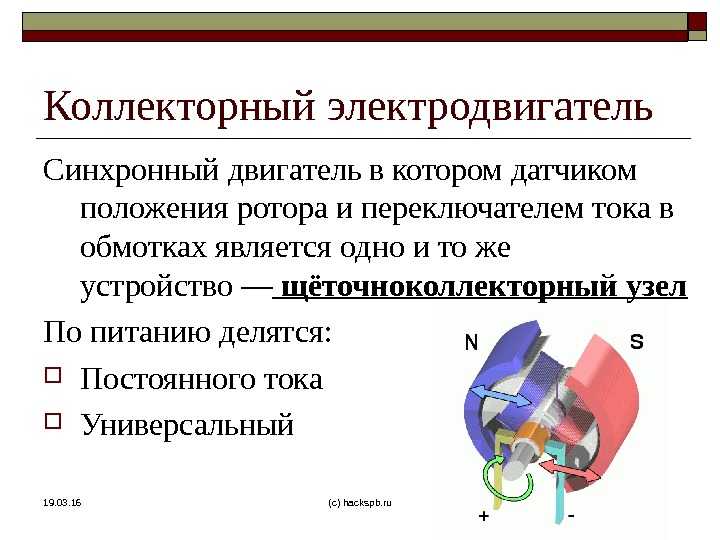 Регулятор изменяет ток возбуждения таким образом, что напряжение на компенсаторе не изменяется.
Регулятор изменяет ток возбуждения таким образом, что напряжение на компенсаторе не изменяется.
Широкое использование электродвигателей асинхронного типа со значительными недогрузками делает работу станций и энергосистем сложнее, так как уменьшается коэффициент мощности системы, это ведет к незапланированным потерям, к их неполному использованию по активной мощности. В связи с этим появилась необходимость в использовании двигателей синхронного типа, особенно для приводов механизмов значительной мощности.
Если сравнивать синхронные электродвигатели с асинхронными, то достоинством синхронных стала их работа коэффициентом мощности равном 1, благодаря действию возбуждения постоянным током. При этом они не расходуют реактивную мощность из питающей сети, а если работают с перевозбуждением, то даже отдают некоторую величину реактивной мощности для сети.
В итоге коэффициент мощности сети улучшается, и снижаются потери напряжения, увеличивается коэффициент мощности генераторов электростанций.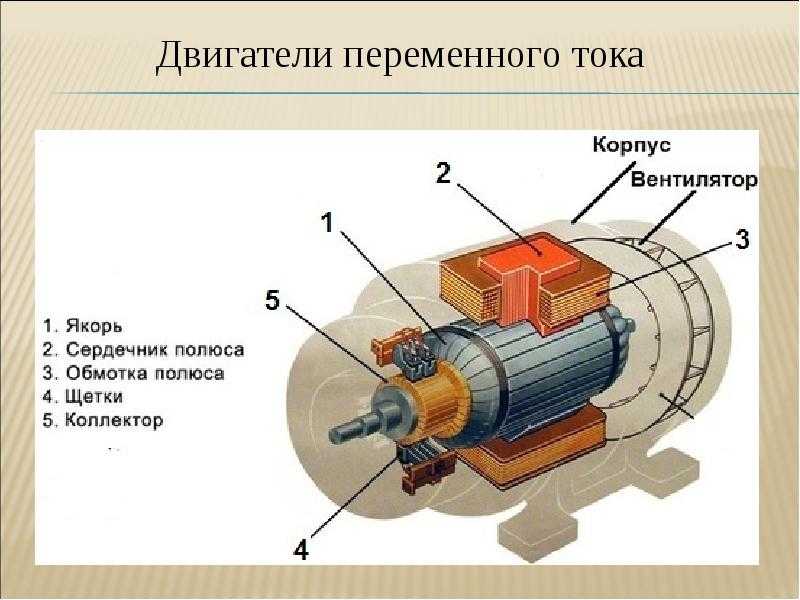 Наибольший момент синхронного электродвигателя прямо зависит от напряжения, а у синхронного электромотора – от квадрата напряжения.
Наибольший момент синхронного электродвигателя прямо зависит от напряжения, а у синхронного электромотора – от квадрата напряжения.
Поэтому, при уменьшении напряжения синхронный электромотор имеет по-прежнему значительную нагрузочную способность. Также, применение возможности повышения возбуждающего тока синхронных моторов дает возможность повышать их надежность эксплуатации при внезапных снижениях напряжения, и оптимизировать в таких случаях работу всей энергосистемы.
Из-за большой величины воздушного промежутка дополнительные потери в стальных сердечниках и в роторе синхронных моторов меньше, чем у двигателей асинхронного вида. Поэтому КПД синхронных моторов чаще бывает больше.
Однако устройство синхронных моторов намного сложнее, а также необходим возбудитель или другое устройство питания возбуждения. Поэтому синхронные моторы имеют более высокую стоимость по сравнению с асинхронными с короткозамкнутым ротором.
Запуск и регулировка скорости у синхронных электродвигателей имеет свои сложности. Но при больших мощностях их преимущества превосходят недостатки. Поэтому они применяются во многих местах, где не нужны частые пуски, остановки оборудования, а также нет необходимости в регулировки оборотов двигателя с приводом механизмов насосов, компрессоров, мельниц и т.д.
Но при больших мощностях их преимущества превосходят недостатки. Поэтому они применяются во многих местах, где не нужны частые пуски, остановки оборудования, а также нет необходимости в регулировки оборотов двигателя с приводом механизмов насосов, компрессоров, мельниц и т.д.
Чем синхронный двигатель от асинхронного отличается такой вопрос часто задают на различных форумах.
Чем синхронный от асинхронного двигателя отличается
Основное отличие в том, что у асинхронного двигателя скорость вращения ротора всегда меньше, скорости вращения магнитного поля в то время как у синхронного же двигателя скорость ротора или равна или в особенных случаях конструкции кратна скорости ротора.
А так много отличий на самомм деле, но это самые основные из-за них они собственно говоря так и называются.
Асинхронные
двигатели имеют простую конструкцию и надежны в эксплуатации. Недостатком асинхронных двигателей является трудность регулирования их частоты вращения.
Чтобы реверсировать трехфазный асинхронный двигатель (изменить направление вращения двигателя на противоположное), необходимо поменять местами две фазы, то есть поменять местами два любых линейных провода, подходящих к обмотке статора двигателя.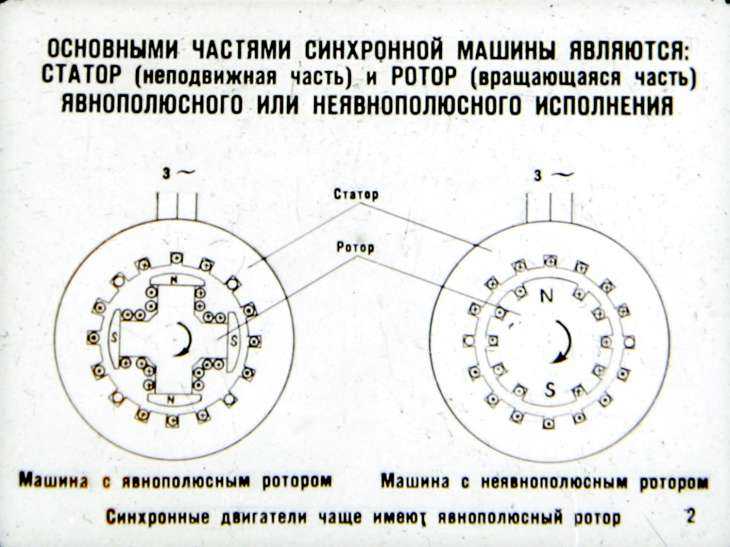
Т.е это достаточно дешевый двигатель/, который применяется везде, синхронную машину найти крайне тяжело.
В отличие от асинхронного двигателя частота вращения синхронного
двигателя постоянная при различных нагрузках. Синхронные двигатели находят применение для привода машин постоянной скорости (насосы, компресоры, вентиляторы) ими легко управлять.
Отличить можно по количеству оборотав на табличке (если там явно неуказан тип машины), у ассинхронников не круглое число оборотов, 950 об/мин у синхронной машины 1000 об/мин.
Заказные синхронные и асинхронные двигатели переменного тока
Если вы ищете исчерпывающую информацию о двигателях переменного тока, вы попали в нужное место. Заказные двигатели переменного тока делятся на две основные категории: синхронные и асинхронные. Наиболее распространенным типом асинхронного двигателя является асинхронный двигатель переменного тока, который производители двигателей изготавливают на заказ с использованием трансформатора переменного тока с вращающейся вторичной обмоткой.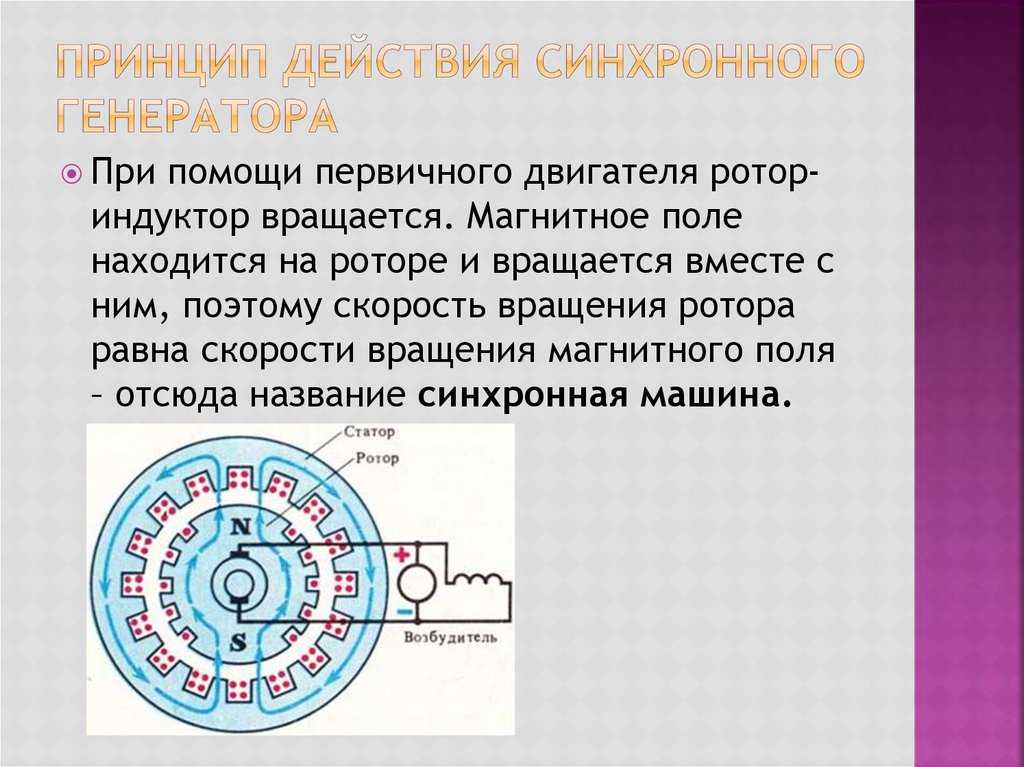 В этом типе двигателя первичная обмотка, или статор, подключается к источнику питания, в то время как короткозамкнутый вторичный элемент, или ротор, несет индуцированный вторичный ток. Воздействие токов ротора на поток в воздушном зазоре создает крутящий момент. С другой стороны, асинхронный двигатель относится к отдельному классу двигателей переменного тока из-за различий в конструкции и рабочих характеристиках. Sinotech предлагает надежный каталог двигателей, изготовленных нашими производителями двигателей переменного тока, которые могут быть адаптированы к вашим точным спецификациям.
В этом типе двигателя первичная обмотка, или статор, подключается к источнику питания, в то время как короткозамкнутый вторичный элемент, или ротор, несет индуцированный вторичный ток. Воздействие токов ротора на поток в воздушном зазоре создает крутящий момент. С другой стороны, асинхронный двигатель относится к отдельному классу двигателей переменного тока из-за различий в конструкции и рабочих характеристиках. Sinotech предлагает надежный каталог двигателей, изготовленных нашими производителями двигателей переменного тока, которые могут быть адаптированы к вашим точным спецификациям.
Узнайте последние новости о двигателях переменного тока в нашем блоге.
Асинхронные и синхронные двигатели переменного тока
Обзор асинхронных двигателей переменного тока
Асинхронные двигатели переменного тока
Все асинхронные двигатели являются асинхронными двигателями. Как одни из самых простых и надежных электродвигателей, асинхронные двигатели переменного тока имеют две основные электрические сборки: статор с обмоткой и узел ротора. Двигатель получил свое название от токов, втекающих в ротор, которые индуцируют переменные токи, протекающие в первичном элементе или статоре. Комбинированные магнитные эффекты токов статора и ротора создают силу, необходимую для создания вращения.
Двигатель получил свое название от токов, втекающих в ротор, которые индуцируют переменные токи, протекающие в первичном элементе или статоре. Комбинированные магнитные эффекты токов статора и ротора создают силу, необходимую для создания вращения.
Электродвигатели переменного тока, в том числе асинхронные двигатели переменного тока, имеют роторы с пластинчатыми цилиндрическими железными сердечниками с прорезями для приема проводников. Наиболее распространенный тип ротора, производимого производителями двигателей переменного тока, иногда называют «беличьей клеткой», который имеет литые алюминиевые проводники и короткозамыкающие торцевые кольца. Беличья клетка вращается, когда движущееся магнитное поле создает ток в укороченных проводниках.
В двигателе переменного тока скорость, с которой вращается магнитное поле, называется синхронной скоростью (n с ). Эта скорость определяется количеством полюсов статора и частотой источника питания. Формула для расчета синхронной скорости двигателя переменного тока: n с = 120f/p.
- n с: синхронная скорость в об/мин
- f: частота сетевого напряжения в Гц
- p: количество полюсов
Синхронная скорость — это абсолютный верхний предел скорости двигателя переменного тока. Если ротор вращается с той же скоростью, что и вращающееся магнитное поле, проводники ротора не пересекают силовые линии и не создают крутящего момента.
При работе двигателя переменного тока ротор всегда вращается медленнее, чем магнитное поле. Скорость ротора достаточно мала, чтобы вызвать надлежащее количество тока, протекающего через ротор, чтобы результирующий крутящий момент был достаточным для управления нагрузкой и преодоления потерь на аэродинамическое сопротивление и трение.
Разница скоростей между ротором двигателя переменного тока и магнитным полем называется «скольжением». Скольжение — это процент от синхронной скорости. Формула для расчета скольжения: s = 100 (n s – n а )/n с .
- с = скольжение
- n с = синхронная скорость
- n a = фактическая скорость
Синхронные двигатели Обзор
Синхронные двигатели имеют особую конструкцию ротора, которая позволяет им вращаться с той же скоростью, что и поле статора. Другими словами, они работают в абсолютной синхронизации с частотой сети. К основным типам синхронных двигателей относятся двигатели без возбуждения и двигатели с возбуждением от постоянного тока. Подобно асинхронным двигателям переменного тока, скорость синхронных двигателей определяется количеством пар полюсов. Он рассчитывается по соотношению частоты линии.
Производители электродвигателей на заказ проектируют синхронные электродвигатели различных типоразмеров, от субдробных двигателей с автовозбуждением до мощных двигателей переменного тока с возбуждением постоянного тока для промышленных приводов. В диапазоне долей мощности синхронные двигатели обеспечивают точную постоянную скорость.
При применении к промышленным нагрузкам синхронные двигатели большой мощности выполняют две важные функции:
- Обеспечивают высокоэффективное преобразование энергии переменного тока в механическую
- Работа с опережающим или единичным коэффициентом мощности, что обеспечивает коррекцию коэффициента мощности
Синхронные электродвигатели без возбуждения
Производители двигателей переменного тока создают электродвигатели без возбуждения, используя конструкции с реактивным сопротивлением и гистерезисом. Они используют схему самозапуска и не требуют внешнего источника возбуждения.
Синхронные электродвигатели с возбуждением от постоянного тока
Электродвигатели с возбуждением от постоянного тока доступны в размерах более 1 л.с. Для работы им требуется постоянный ток, подаваемый через контактные кольца для возбуждения. Двигатель получает постоянный ток от отдельного источника или генератора постоянного тока, подключенного к валу двигателя переменного тока.
Однофазные и многофазные синхронные двигатели должны приводиться в движение или их ротор должен быть подключен в виде цепи самозапуска для запуска. Поскольку поле электродвигателя вращается с синхронной скоростью, электродвигатель должен быть ускорен, прежде чем он сможет войти в синхронизм. Разгон с нулевой скорости требует проскальзывания до достижения синхронизма. Следовательно, важно использовать отдельные средства для начала.
В самозапускающихся электродвигателях переменного тока, изготовленных по индивидуальному заказу, типоразмера fhp используются методы пуска, общие для асинхронных электродвигателей, такие как расщепленная фаза, пуск с конденсатором, пуск с отталкиванием и пуск с экранированным полюсом. Двигатели автоматически переключаются в синхронный режим из-за электрических характеристик.
В двигателях с возбуждением от постоянного тока для запуска используется короткозамкнутая обмотка, называемая амортизирующей или демпферной обмоткой. Между прочим, низкий пусковой момент двигателя и потребность в источнике питания постоянного тока требуют пусковой системы, которая:
- Обеспечивает полную защиту электродвигателя при пуске
- Применяет возбуждение поля постоянного тока в нужное время
- Удаляет возбуждение поля при вытягивании ротора (максимальный крутящий момент)
- Защищает короткозамкнутую обмотку электродвигателя от теплового повреждения при асинхронном режиме
A Взгляд на крутящий момент в электродвигателях с возбуждением постоянным током
Тяговый крутящий момент
Тяговый крутящий момент электродвигателя определяется как минимальный крутящий момент, создаваемый от состояния покоя до точки тяги. Этот крутящий момент должен превышать крутящий момент нагрузки настолько, чтобы поддерживать удовлетворительную скорость ускорения при нормальных условиях напряжения.
Этот крутящий момент должен превышать крутящий момент нагрузки настолько, чтобы поддерживать удовлетворительную скорость ускорения при нормальных условиях напряжения.
Момент реактивного сопротивления
Момент реактивного сопротивления двигателя является результатом заметности полюсных наконечников ротора, что является предпочтительным направлением намагничивания. Он пульсирует на скоростях ниже синхронных.
Момент реактивности влияет на моменты втягивания и вытягивания двигателя, поскольку невозбужденный явнополюсный ротор стремится выровняться с магнитным полем статора электродвигателя для поддержания минимального магнитного сопротивления. Сопротивления электродвигателя может быть достаточно, чтобы привести малонагруженную малоинерционную систему в синхронизм и развить тяговый момент примерно в 30 процентов.
Синхронный крутящий момент
Синхронный крутящий момент электродвигателя — это крутящий момент, создаваемый после приложения возбуждения.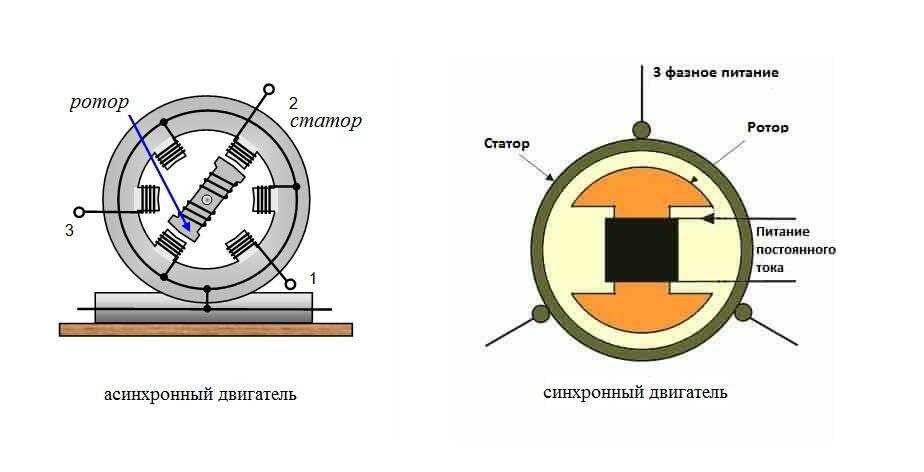 Он представляет собой общий стационарный крутящий момент, доступный для управления нагрузкой. Крутящий момент достигает максимума при отставании ротора примерно на 70° от вращающегося магнитного поля статора. Однако максимальным значением является момент отрыва.
Он представляет собой общий стационарный крутящий момент, доступный для управления нагрузкой. Крутящий момент достигает максимума при отставании ротора примерно на 70° от вращающегося магнитного поля статора. Однако максимальным значением является момент отрыва.
Момент отрыва
Момент отрыва — это максимальный устойчивый момент, который электродвигатель развивает на синхронной скорости в течение одной минуты при номинальной частоте и нормальном возбуждении. Нормальный момент отрыва обычно составляет 150 процентов от момента полной нагрузки для электродвигателей с единичным коэффициентом мощности. Это от 175 до 200 процентов для электродвигателей с ведущим коэффициентом мощности 0,8.
Втягивающий момент
Втягивающий момент синхронного двигателя представляет собой крутящий момент, развиваемый при втягивании подключенной инерционной нагрузки в синхронизм при приложении возбуждения. Он развивается при переходе от скорости проскальзывания к синхронной скорости, когда электродвигатели переходят с асинхронного режима работы на синхронный.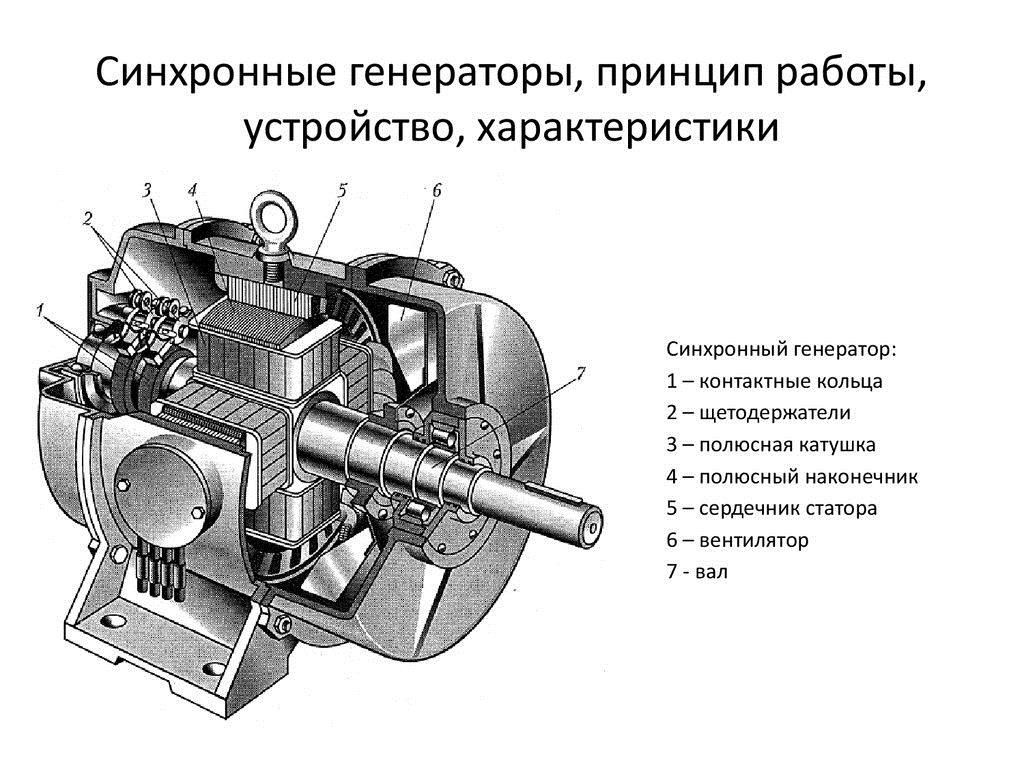 Это, как правило, самый критический период при запуске синхронного двигателя. При синхронной скорости момент, развиваемый амортизирующей и обмотками возбуждения, становится равным нулю. В результате в точке втягивания действуют только сопротивление и синхронизирующий момент, обеспечиваемые возбуждением обмотки возбуждения.
Это, как правило, самый критический период при запуске синхронного двигателя. При синхронной скорости момент, развиваемый амортизирующей и обмотками возбуждения, становится равным нулю. В результате в точке втягивания действуют только сопротивление и синхронизирующий момент, обеспечиваемые возбуждением обмотки возбуждения.
Дополнительные типы двигателей переменного тока по заказу
Многофазные двигатели переменного тока
Многофазные двигатели переменного тока с короткозамкнутым ротором, такие как трехфазные двигатели, представляют собой машины с постоянной скоростью. Они имеют некоторую степень гибкости в рабочих характеристиках при изменении конструкции паза ротора. Изменения в двигателях переменного тока вызывают изменения тока, крутящего момента и скорости полной нагрузки. Стандартизация и инновации позволили создать четыре основных типа двигателей переменного тока:
Исполнения A и B Характеристики
- Двигатель переменного тока общего назначения с нормальными пусковыми моментами и токами, а также малым скольжением
- Дробные многофазные двигатели переменного тока, как правило, конструкции B
- Поскольку конструкция B имеет падающие характеристики, многофазный двигатель переменного тока с таким же аварийным или максимальным крутящим моментом, как у однофазного двигателя переменного тока, не может достичь той же точки скорости-момента для скорости с полной нагрузкой, что и однофазный пользовательский переменный ток.
 конструкции двигателя
конструкции двигателя
- Опрокидывающий крутящий момент должен быть выше для сопоставимых скоростей при полной нагрузке (минимум 140 % опрокидывающего крутящего момента однофазных двигателей переменного тока общего назначения)
Исполнение C Характеристики
- Высокий пусковой момент при нормальном пусковом токе и малом скольжении
- Используется там, где пусковые нагрузки высоки при пуске, но обычно работают при номинальной полной нагрузке
- Не требует высоких перегрузок после достижения рабочей скорости
Конструкция D Характеристики
- Высокое скольжение, позволяющее снижать скорость при колебаниях нагрузки
- Низкий пусковой ток
- Низкая скорость полной нагрузки
- Эту конструкцию можно разделить на несколько подгрупп, которые различаются по проскальзыванию или форме кривой скорость-момент
Конструкция F Характеристики
- Низкий пусковой момент
- Низкий пусковой ток
- Низкое скольжение
- Производители двигателей на заказ изготавливают двигатели переменного тока для получения низкого тока при заторможенном роторе
- Заблокированный ротор и низкий крутящий момент
- Двигатели обычно используются при низком пусковом моменте и отсутствии высоких перегрузок после достижения рабочей скорости
Двигатели переменного тока с фазным ротором
Двигатели переменного тока с короткозамкнутым ротором относительно негибкие в отношении характеристик скорости и крутящего момента. Однако специальный двигатель переменного тока с фазным ротором имеет регулируемую скорость и крутящий момент. Применение двигателей переменного тока с фазным ротором заметно отличается от двигателей переменного тока с короткозамкнутым ротором из-за доступности цепи ротора. Получение рабочих характеристик двигателя переменного тока заключается в введении различных значений сопротивления в цепь ротора.
Однако специальный двигатель переменного тока с фазным ротором имеет регулируемую скорость и крутящий момент. Применение двигателей переменного тока с фазным ротором заметно отличается от двигателей переменного тока с короткозамкнутым ротором из-за доступности цепи ротора. Получение рабочих характеристик двигателя переменного тока заключается в введении различных значений сопротивления в цепь ротора.
Вторичное сопротивление в цепи ротора обычно запускает двигатели переменного тока с фазным ротором. Затем сопротивление двигателя переменного тока последовательно уменьшается, чтобы позволить двигателю набрать скорость. В результате двигатели переменного тока могут развивать значительный крутящий момент при ограничении тока заторможенного ротора. Производители двигателей переменного тока могут проектировать это вторичное сопротивление двигателя для непрерывной работы, чтобы рассеивать тепло, выделяемое при непрерывной работе на пониженных скоростях, частом ускорении или ускорении с большими инерционными нагрузками.
Внешнее сопротивление придает двигателям переменного тока характеристику, приводящую к большим падениям скорости вращения при небольшом изменении нагрузки. Обеспечивается пониженная скорость двигателя переменного тока примерно до 50 процентов от номинальной скорости, но эффективность остается низкой.
Многоскоростные двигатели переменного тока
Производители двигателей на заказ конструируют двигатели переменного тока с последовательной последовательностью полюсов для работы на одной скорости. Физически переподключив провода, можно добиться соотношения скоростей 2:1. Типичные скорости для двигателей переменного тока 60 Гц:
- 3600/1800 об/мин (2/4 полюса)
- 1800/900 об/мин (4/8 полюсов)
- 1200/600 об/мин (6/12 полюсов)
Двигатели переменного тока с двумя обмотками имеют две отдельные обмотки, которые производители могут наматывать для любого числа полюсов, чтобы облегчить получение других соотношений скоростей. Однако соотношение больше 1:4 нецелесообразно из-за размера и веса двигателя переменного тока.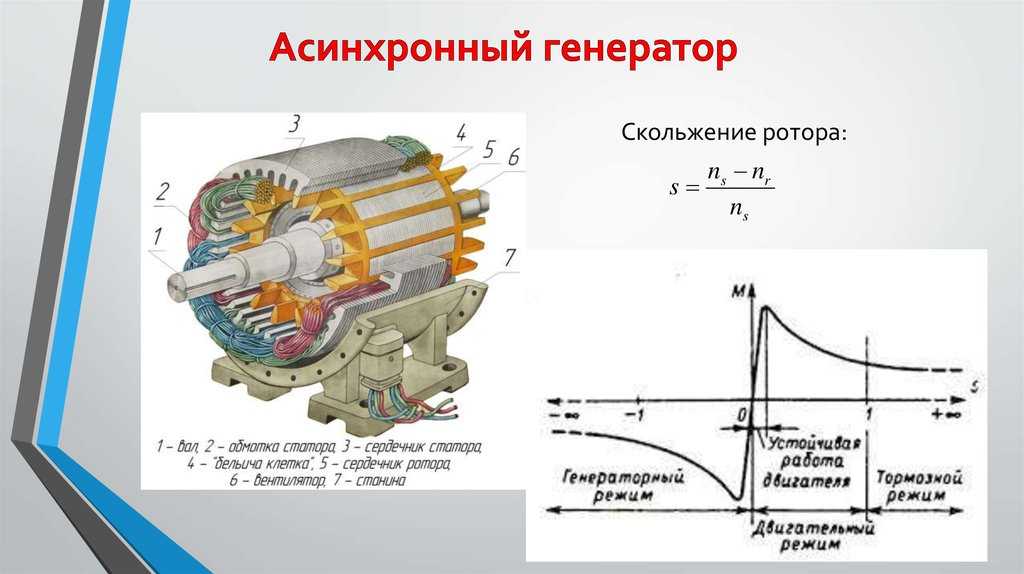 Однофазные двигатели переменного тока обычно имеют конструкцию с переменным крутящим моментом. Однако также доступны двигатели переменного тока с постоянным крутящим моментом и постоянной мощностью в лошадиных силах.
Однофазные двигатели переменного тока обычно имеют конструкцию с переменным крутящим моментом. Однако также доступны двигатели переменного тока с постоянным крутящим моментом и постоянной мощностью в лошадиных силах.
Выходная мощность двигателей переменного тока может быть пропорциональна каждой скорости. Такие нестандартные конструкции двигателей переменного тока имеют выходную мощность в лошадиных силах в соответствии с одной из следующих характеристик нагрузки:
- Переменная крутящий момент : Эти двигатели переменного тока имеют характеристики скорость-момент, которые зависят от квадрата скорости. Например, электродвигатель с частотой вращения 1800/900 об/мин, развивающий мощность 10 л.с. при 1800 об/мин, производит 2,5 л.с. при 900 об/мин. Поскольку двигатели переменного тока сталкиваются с нагрузками, такими как центробежные насосы, вентиляторы и воздуходувки, их требуемый крутящий момент зависит от квадрата или куба скорости.
 Эта характеристика двигателя в целом достаточна.
Эта характеристика двигателя в целом достаточна. - Постоянная крутящий момент : Эти двигатели переменного тока могут развивать одинаковый крутящий момент на каждой скорости. В результате выходная мощность напрямую зависит от скорости. Например, двигатель переменного тока мощностью 10 л.с. при 1800 об/мин производит 5 л.с. при 900 об/мин. Вы найдете эти двигатели в приложениях с требованиями постоянного крутящего момента, таких как смесители, конвейеры и компрессоры.
- Константа мощность : Эти двигатели переменного тока развивают одинаковую мощность на каждой скорости. Крутящий момент обратно пропорционален скорости. Применение таких двигателей переменного тока включает станки, в том числе дрели, фрезерные станки и токарные станки.
Однофазные электродвигатели переменного тока
Однофазные асинхронные электродвигатели переменного тока обычно имеют дробную мощность. Однако однофазная интегральная мощность доступна в более низком диапазоне мощности. Наиболее распространенными однофазными двигателями переменного тока с дробной мощностью являются:
Наиболее распространенными однофазными двигателями переменного тока с дробной мощностью являются:
- Двухфазные
- Интеллектуальный конденсатор
- Постоянный разъемный конденсатор
- Заштрихованная стойка
Этот нестандартный двигатель переменного тока доступен в многоскоростном исполнении, но существуют практические ограничения на количество получаемых скоростей. Доступны модели с двух-, трех- и четырехскоростными двигателями. Методы последовательного полюса или двухобмоточные методы могут сопровождать выбор скорости.
Универсальные двигатели
Универсальные двигатели
Универсальные двигатели работают практически с одинаковыми характеристиками при постоянном или переменном токе частотой до 60 Гц. Двигатели переменного тока отличаются от двигателей постоянного тока соотношением обмоток и более тонкими металлическими пластинами. Двигатели постоянного тока могут работать от переменного тока, но с низким КПД. Универсальные двигатели могут работать от постоянного тока с практически эквивалентными характеристиками двигателей переменного тока. Однако у них хуже коммутация и срок службы щеток по сравнению с эквивалентным двигателем постоянного тока. Важной характеристикой универсальных двигателей переменного тока является то, что они имеют самое высокое отношение мощности к фунту среди всех двигателей переменного тока, поскольку они работают на скоростях, во много раз превышающих скорость любого электродвигателя с частотой 60 Гц.
Однако у них хуже коммутация и срок службы щеток по сравнению с эквивалентным двигателем постоянного тока. Важной характеристикой универсальных двигателей переменного тока является то, что они имеют самое высокое отношение мощности к фунту среди всех двигателей переменного тока, поскольку они работают на скоростях, во много раз превышающих скорость любого электродвигателя с частотой 60 Гц.
При работе без нагрузки универсальные двигатели склонны к разгону. Скорость ограничена только парусностью, трением и коммутацией. Поэтому большие универсальные двигатели почти всегда подключаются напрямую к нагрузке для ограничения скорости. На переносных инструментах, таких как электрические пилы, нагрузка, создаваемая шестернями, подшипниками и охлаждающим вентилятором, достаточна для удержания скорости холостого хода на безопасном уровне.
С универсальным двигателем управление скоростью осуществляется просто, поскольку скорость электродвигателя чувствительна к изменениям напряжения и потока. Реостат или регулируемый автотрансформатор позволяют легко изменять скорость двигателя переменного тока от максимальной скорости до нуля.
Реостат или регулируемый автотрансформатор позволяют легко изменять скорость двигателя переменного тока от максимальной скорости до нуля.
Электродвигатели с синхронизацией
Электродвигатели с синхронизацией имеют номинальную мощность менее 1/10 л.с. и используются в качестве первичных двигателей для устройств синхронизации. Поскольку двигатель используется в качестве таймера, он должен работать с постоянной скоростью.
Электродвигатели переменного и постоянного тока могут использоваться в качестве синхронизирующих двигателей. Электрические синхронизирующие двигатели постоянного тока используются в портативных устройствах или когда требуется высокое ускорение и низкие изменения скорости. Хотя требуется какая-то форма механического или электрического регулятора скорости, такие электродвигатели обладают рядом преимуществ, в том числе:
- Эффективность от 50 до 70 процентов
- Пусковой крутящий момент в 10 раз превышает рабочий крутящий момент
- Относительно простое регулирование скорости
Серводвигатели переменного тока
Серводвигатели используются в сервомеханизмах переменного тока и компьютерах, требующих быстрого и точного отклика. Для получения этих характеристик серводвигатели имеют роторы малого диаметра с высоким сопротивлением. Меньший диаметр обеспечивает низкую инерцию для быстрых пусков, остановок и реверсов. Высокое сопротивление обеспечивает почти линейное соотношение скорости и крутящего момента для точного управления.
Для получения этих характеристик серводвигатели имеют роторы малого диаметра с высоким сопротивлением. Меньший диаметр обеспечивает низкую инерцию для быстрых пусков, остановок и реверсов. Высокое сопротивление обеспечивает почти линейное соотношение скорости и крутящего момента для точного управления.
Серводвигатели ветра, изготовленные по индивидуальному заказу, с двумя фазами, физически расположенными под прямым углом или квадратурой в пространстве. Двигатели имеют фиксированную или эталонную обмотку, которая возбуждается от источника постоянного напряжения. Обмотка управления возбуждается регулируемым или переменным управляющим напряжением, обычно от сервоусилителя. Инженеры проектируют обмотки серводвигателей с одинаковым отношением напряжения к витку, чтобы входная мощность при максимальном возбуждении с фиксированной фазой и максимальном сигнале фазы управления были сбалансированы.
В идеальном серводвигателе крутящий момент на любой скорости прямо пропорционален напряжению обмотки управления двигателя. Однако эта взаимосвязь существует только при нулевой скорости из-за присущей асинхронному серводвигателю неспособности реагировать на изменения входного напряжения в условиях легкой нагрузки.
Однако эта взаимосвязь существует только при нулевой скорости из-за присущей асинхронному серводвигателю неспособности реагировать на изменения входного напряжения в условиях легкой нагрузки.
Свойственное серводвигателям демпфирование уменьшается по мере увеличения номинальных характеристик, и двигатели имеют разумную эффективность в ущерб линейности скорости-крутящего момента. Многие более крупные серводвигатели имеют встроенные вспомогательные вентиляторы для поддержания температуры в безопасных рабочих диапазонах. Доступны серводвигатели переменного тока мощностью от менее 1 до 750 Вт и размером от 0,5 до 0,7 дюйма. Большинство серводвигателей переменного тока имеют модульные или встроенные редукторы.
Заинтересованы в линейных двигателях переменного тока? Об их истории, характеристиках и применении читайте здесь.
Sinotech разрабатывает двигатели переменного тока на заказ в США и производит их в нескольких местах по всему Тихоокеанскому региону, чтобы снизить ваши расходы и риски.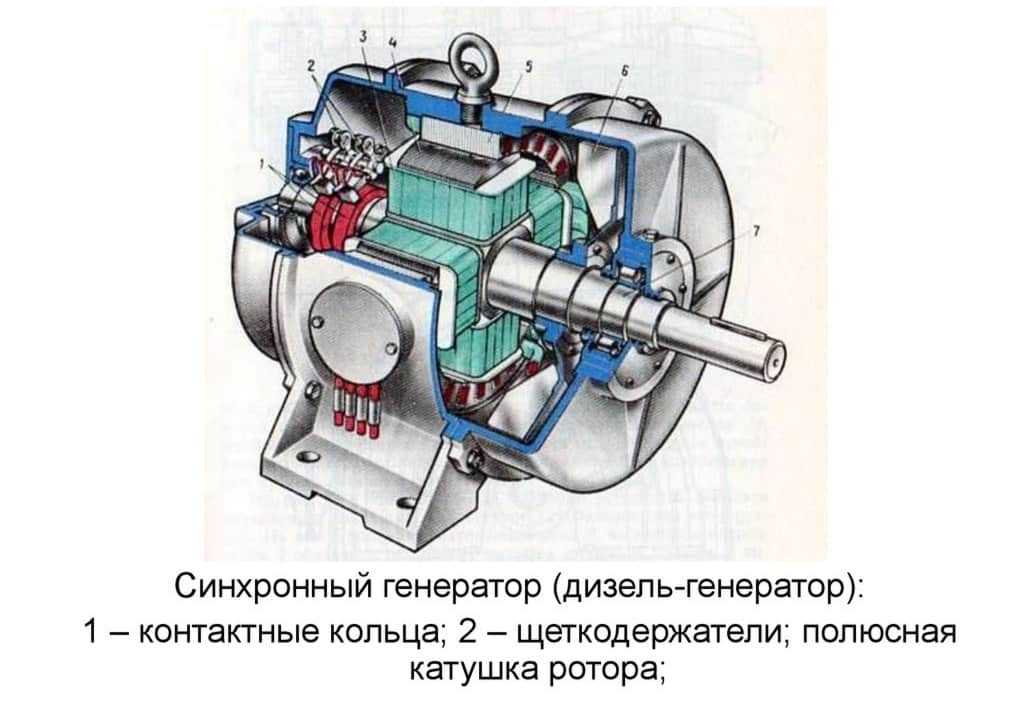 Свяжитесь с нами сегодня и дайте нам знать, как наши услуги по изготовлению двигателей переменного тока на заказ могут помочь вам запустить и запустить ваше приложение уже сегодня.
Свяжитесь с нами сегодня и дайте нам знать, как наши услуги по изготовлению двигателей переменного тока на заказ могут помочь вам запустить и запустить ваше приложение уже сегодня.
Синхронные и асинхронные двигатели: обнаружение различий
Упрощенное деление двигателей с дробной мощностью на двигатели переменного тока, постоянного тока, бесщеточные и универсальные. Однако так же, как обувь можно разделить на рабочие ботинки, классические туфли, кроссовки и т. д., каждая двигательная категория имеет различные подгруппы. Например, двигатели переменного тока можно разделить на синхронные и асинхронные (также известные как асинхронные).
Хотя оба работают от сети переменного тока (хотя синхронный также использует постоянный ток), их создание, работа и использование сильно различаются.
Прежде чем разбить обсуждение на две категории переменного тока, важно помнить, что в типичном двигателе переменного тока (как более подробно описано в нашем блоге Основы двигателя переменного тока ) вращающееся магнитное поле создается статором, индуцируется входным током. Скорость этого поля определяется частотой источника питания и числом полюсов машины и называется «синхронной скоростью», точнее, скоростью, возникающей одновременно.
Скорость этого поля определяется частотой источника питания и числом полюсов машины и называется «синхронной скоростью», точнее, скоростью, возникающей одновременно.
Асинхронный двигатель
Говоря об асинхронных двигателях, обычно имеют в виду асинхронные двигатели переменного тока. Наиболее распространенный тип, асинхронный двигатель переменного тока с короткозамкнутым ротором, обычно имеет стационарную обмотку, называемую статором, а также ротор, сделанный из электротехнической стали и токопроводящих стержней из алюминия или меди, которые закорочены на каждом конце.
Как указано выше, магнитное поле создается в статоре от сети переменного тока, которая, в свою очередь, индуцирует токи в токопроводящих стержнях ротора. Этот эффект индукции домино приводит к притяжению между вращающимся магнитным полем статора и индуцированным магнитным полем ротора. Простое уравнение может помочь проиллюстрировать это более четко.
Питание переменного тока + статор = вращающееся магнитное поле #1 (синхронная скорость)
Вращающееся магнитное поле #1 + ротор = вращающееся магнитное поле #2 (отставание от синхронной скорости)
Ротор, естественно, будет вращаться медленнее, чем синхронная скорость магнитного поля в статоре, но притяжение между компонентами статора и ротора ставит их в непрерывную игру в догонялки (за счет создания крутящего момента). Разница между этими двумя скоростями называется скольжением и обычно указывается в процентах от синхронной скорости.
Разница между этими двумя скоростями называется скольжением и обычно указывается в процентах от синхронной скорости.
Магнитное поле #1 (быстрее) – Магнитное поле #2 (медленнее) = Скольжение
Синхронный двигатель
синхронная скорость. Это возможно, потому что синхронные двигатели основаны на частоте и не зависят от постоянства начального входного тока.
Представьте себе синхронисток на соревнованиях по прыжкам в воду. Их движения точно совпадают с движениями другого члена команды по плаванию — их начало, середина и точки входа потенциально идентичны.
Синхронные двигатели работают примерно так же. Однако точно так же, как потребовалось бы много времени, чтобы достичь такого уровня единообразия в их методах погружения, синхронные двигатели не достигают одинакового вращения между магнитными полями ротора и статора только с начальным входным током. Мощность переменного тока индуцирует статор (как типичный асинхронный двигатель), но затем он достигает точки запаздывания, мощность постоянного тока подается через возбудитель — устройство, которое подает на двигатель ток намагничивания для создания потока.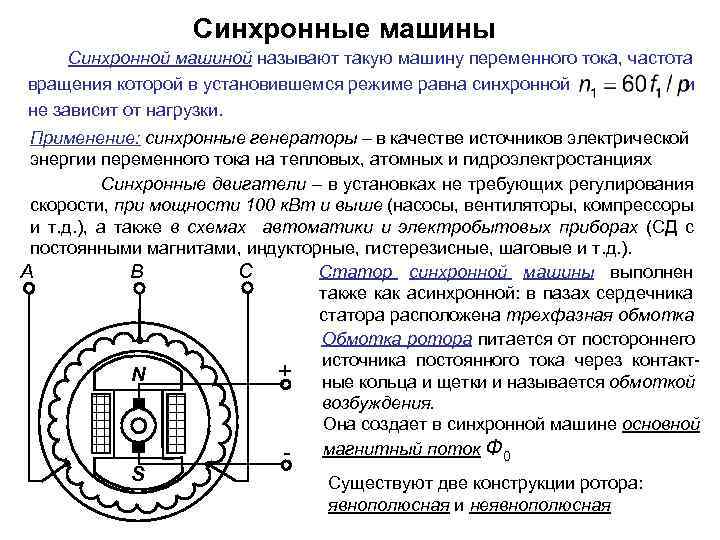 Это позволяет вращению увеличиваться и связываться с синхронной скоростью, и, если на это не воздействуют экстремальные условия, эти скорости будут оставаться синхронизированными, что позволяет использовать высокоточные функции с помощью используемого приложения.
Это позволяет вращению увеличиваться и связываться с синхронной скоростью, и, если на это не воздействуют экстремальные условия, эти скорости будут оставаться синхронизированными, что позволяет использовать высокоточные функции с помощью используемого приложения.
Это подводит нас к краткому обзору того, как различная конструкция двигателей переменного тока позволяет каждому поддерживать свою индивидуальную и разнообразную работу и использование.
Синхронный:
- Более высокая начальная стоимость
- Требуется возбудитель
- Для высокоточных приложений (таких как часы или проигрыватель)
- Наиболее эффективен в больших промышленных двигателях
- Зависит от частоты (более согласованный)
Индукция:
- Потенциально более высокая стоимость жизненного цикла
- Специальные элементы управления обычно не требуются
- Более распространенный; используется во многих повседневных приложениях
- Наиболее эффективен в небольших приложениях
- Скорость зависит от крутящего момента
Как видите, асинхронные и синхронные двигатели, хотя и классифицируются как двигатели переменного тока, имеют довольно разные конструктивные и эксплуатационные характеристики, причем наиболее важным фактором является наличие скольжения.