Как правильно подключить двухфазный двигатель. Какой конденсатор нужен для двухфазного двигателя. Можно ли использовать любой конденсатор для запуска двухфазного двигателя. Как рассчитать емкость конденсатора для двухфазного двигателя.
Особенности двухфазных асинхронных двигателей
Двухфазные асинхронные двигатели имеют две обмотки статора, сдвинутые в пространстве на 90 электрических градусов. Для создания вращающегося магнитного поля необходимо обеспечить сдвиг фаз токов в этих обмотках также на 90 градусов. Этот сдвиг создается с помощью фазосдвигающего элемента — обычно конденсатора.
Зачем нужен конденсатор для двухфазного двигателя?
Конденсатор в цепи двухфазного двигателя выполняет две важные функции:
- Создает необходимый сдвиг фаз между токами в обмотках статора для формирования вращающегося магнитного поля
- Обеспечивает пусковой момент, необходимый для запуска двигателя
Без конденсатора двухфазный двигатель не сможет запуститься и нормально работать от однофазной сети.

Можно ли использовать любой конденсатор для двухфазного двигателя?
Нет, использовать произвольный конденсатор для двухфазного двигателя нельзя. Емкость конденсатора должна быть правильно подобрана под конкретный двигатель. При неправильно выбранной емкости возможны следующие проблемы:
- Двигатель не запустится или будет запускаться с трудом
- Повышенный шум и вибрация при работе
- Перегрев обмоток из-за повышенных токов
- Снижение КПД и мощности двигателя
- Ускоренный износ подшипников
Как рассчитать нужную емкость конденсатора?
Существует несколько способов определить требуемую емкость конденсатора для двухфазного двигателя:
- По паспортным данным двигателя — обычно производитель указывает рекомендуемую емкость
- Эмпирическая формула: C (мкФ) = 68 * P (кВт) / U (В), где P — мощность, U — напряжение
- Точный расчет по параметрам двигателя (сопротивление обмоток, индуктивность и т.д.)
- Экспериментальный подбор с измерением рабочих токов и температуры обмоток
Для большинства бытовых двигателей небольшой мощности подойдет емкость 15-35 мкФ. Но лучше уточнить точное значение.

Какой тип конденсатора выбрать?
Для двухфазных двигателей рекомендуется использовать следующие типы конденсаторов:
- Металлобумажные конденсаторы (МБГЧ, МБГО)
- Полипропиленовые конденсаторы
- Специальные пусковые конденсаторы для двигателей
Важно выбирать конденсатор на соответствующее рабочее напряжение (обычно 400-450В) и с допустимым переменным током.
Схема подключения конденсатора к двухфазному двигателю
Типовая схема подключения двухфазного двигателя с конденсатором выглядит следующим образом:
«` «`Где:
- L, N — фаза и ноль питающей сети
- U1, U2 — выводы обмоток двигателя
Как подобрать конденсатор опытным путем?
Если точные параметры двигателя неизвестны, можно подобрать конденсатор экспериментально:
- Начните с конденсатора емкостью 20-25 мкФ
- Попробуйте запустить двигатель — он должен легко набирать обороты
- Измерьте токи в обеих обмотках — они должны быть примерно равны
- Проверьте нагрев обмоток — он не должен быть чрезмерным
- При необходимости увеличивайте или уменьшайте емкость, добиваясь оптимальной работы
Будьте осторожны при экспериментах и соблюдайте правила электробезопасности!
Частые ошибки при подключении двухфазных двигателей
При работе с двухфазными двигателями часто допускают следующие ошибки:
- Использование конденсатора неподходящей емкости
- Применение низковольтных конденсаторов
- Неправильное подключение выводов обмоток
- Отсутствие защиты от перегрузки
- Использование электролитических конденсаторов вместо пленочных
Внимательно изучите схему подключения и характеристики вашего двигателя, чтобы избежать этих ошибок.
Можно ли запустить двухфазный двигатель без конденсатора?
Теоретически запустить двухфазный двигатель без конденсатора возможно, но на практике это крайне нежелательно по следующим причинам:
- Очень низкий пусковой момент — двигатель может не запуститься под нагрузкой
- Высокие пусковые токи, опасные для обмоток
- Неустойчивая работа, повышенная вибрация
- Низкий КПД и мощность
- Быстрый перегрев обмоток
Поэтому настоятельно рекомендуется всегда использовать конденсатор подходящей емкости для запуска и работы двухфазного двигателя.

Заключение
Правильный выбор и подключение конденсатора критически важны для нормальной работы двухфазного асинхронного двигателя. Нельзя использовать произвольный конденсатор — его емкость должна быть точно подобрана под конкретный двигатель. При отсутствии точных данных емкость можно подобрать экспериментально, соблюдая меры предосторожности. Грамотное применение конденсатора обеспечит легкий запуск, устойчивую работу и длительный срок службы вашего двухфазного электродвигателя.
Как подключить к частотному преобразователю однофазный двигатель?
Однофазный электродвигатель с расщепленными полюсами
СОЮЗ СОВЕТСКИХСОЦИАЛИСТИЧЕСНИРЕСПУБЛИК А 1 19) 50 4 Н 02 К 17/10 ПИСАНИЕ ИЗОБРЕТЕНИЯ ГОСУДАРСТВЕННЫЙ КОМИТЕТ ССС ПО ДЕЛАМ ИЗОБРЕТЕНИЙ И ОТНРЫТ н двтсе скому свиДКтеЛьСт(46) 07.10.86. Бюл. В 37 (71) Ташкентский ордена Дружбы наро дов политехнический институт им. А.Р.Бируни и Московский ордена . Ленина и ордена Октябрьской Революции. энергетический институт ;(72) А.В.Иванов-Смоленский, В.А.Куз нецов и В.М.Ахматова(56) Роферов Ф,М. Электрические машины автоматических устройств. М.: Высшая школа, 196, с. 81.Авторское свидетельство СССР У 564688, кл. Н .02 К 17/04, 1977. (54) ОДНОФАЗНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ С РАСЩЕПЛЕННЫМИ ПОЛЮСАМИ(57) Изобретение относится к электротехнике, а именно к однофазным асинхронным электродвигателям с расщеп» ленными полюсами, Целью изобретения является повышение энергетических показателей. Электродвигатель содержит статор с короткозамкнутыми витками, установленными на полюсных наконечниках, и ротор с прямыми пазами. Полюсный наконечник содержит часть 1, не обхваченную короткоэамкнутым: витком 2, и часть 3, обхваченную им. Сторона короткозамкнутого витка 2, размещенная в пазу напротив поверхности ротора, установлена со скосом д относительно продольной оси полюсного наконечника. Скос короткозамкнутого витка ослабляет высшие гармоническиа магнитного лотока и улуниаот а энергетические показатели,ил.ъа1 1262646 Формула изобретения Составитель В,КрасновТехредЛ.Сердюкова Корректор С.Черни Редактор О. Головач Тираж 631 Подписное ВНИИПИ Государственного комитета СССР по делам изобретений и открытий 113035, Москва, Ж, Раушская наб., д. 4/5Заказ 544/54 Производственно-полиграфическое предприятие, г. Ужгород, ул, Проектная, 4 Изобретение относится к электротехнике, в частносФ к однофазным асинхронным микродвигателям с расщепленными полюсами.Цель изобретения — повышение энергетических,показателей двигателей.На чертеже показана развертка поверхности полюсных йаконечников, обращенной к ротору.Полюсный наконечник содержит часть 1, необхваченную короткозамкнутым витком 2,и часть 3, обхваченную короткозамкнутым витком.
Полюсный наконечник содержит часть 1, не обхваченную короткоэамкнутым: витком 2, и часть 3, обхваченную им. Сторона короткозамкнутого витка 2, размещенная в пазу напротив поверхности ротора, установлена со скосом д относительно продольной оси полюсного наконечника. Скос короткозамкнутого витка ослабляет высшие гармоническиа магнитного лотока и улуниаот а энергетические показатели,ил.ъа1 1262646 Формула изобретения Составитель В,КрасновТехредЛ.Сердюкова Корректор С.Черни Редактор О. Головач Тираж 631 Подписное ВНИИПИ Государственного комитета СССР по делам изобретений и открытий 113035, Москва, Ж, Раушская наб., д. 4/5Заказ 544/54 Производственно-полиграфическое предприятие, г. Ужгород, ул, Проектная, 4 Изобретение относится к электротехнике, в частносФ к однофазным асинхронным микродвигателям с расщепленными полюсами.Цель изобретения — повышение энергетических,показателей двигателей.На чертеже показана развертка поверхности полюсных йаконечников, обращенной к ротору.Полюсный наконечник содержит часть 1, необхваченную короткозамкнутым витком 2,и часть 3, обхваченную короткозамкнутым витком. Двигатель работает следующим образом. Магнитный поток, создаваемый обмоткой возбуждения, проходя по обеим частям полюсного наконечника, наводит в короткозамкнутом витке ЭДС.,( Ток, под действием этой ЭДС, протекая по короткозамкнутому витку,. создает свой магнитный поток, сдвинутый в пространстве и во времени относительно магнитного потока, проходяще» го по части полюсного наконечника,необхваченного короткоэамкнутым витком,В двигателе из»за скоса коротко».замкнутого витка высшие гармонические магнитного потока обеих частейполюсного наконечника, ослабляются,поскольку изменяется характер нарастания магнитного потока в контурахротора. Это позволяет снизить моменО ты от высших гармоник и улучшитьэнергетические показатели двигателя. 11 Однофазный электродвигатель с расщепленными полюсами, содержащий ротор с прямыми пазами, статор с корот-, козамкнутыми витками, установленными в пазах на полюсных наконечниках, рО о т л и ч а ю щ и й с я тем, что,с целью повышения энергетических показателей, размещенная в пазу напротив поверхности ротора сторона каждого короткоэамкнутого витка установ 2 з лена са скосом относительно продольной оси полюсного наконечника.
Двигатель работает следующим образом. Магнитный поток, создаваемый обмоткой возбуждения, проходя по обеим частям полюсного наконечника, наводит в короткозамкнутом витке ЭДС.,( Ток, под действием этой ЭДС, протекая по короткозамкнутому витку,. создает свой магнитный поток, сдвинутый в пространстве и во времени относительно магнитного потока, проходяще» го по части полюсного наконечника,необхваченного короткоэамкнутым витком,В двигателе из»за скоса коротко».замкнутого витка высшие гармонические магнитного потока обеих частейполюсного наконечника, ослабляются,поскольку изменяется характер нарастания магнитного потока в контурахротора. Это позволяет снизить моменО ты от высших гармоник и улучшитьэнергетические показатели двигателя. 11 Однофазный электродвигатель с расщепленными полюсами, содержащий ротор с прямыми пазами, статор с корот-, козамкнутыми витками, установленными в пазах на полюсных наконечниках, рО о т л и ч а ю щ и й с я тем, что,с целью повышения энергетических показателей, размещенная в пазу напротив поверхности ротора сторона каждого короткоэамкнутого витка установ 2 з лена са скосом относительно продольной оси полюсного наконечника.
Смотреть
Система управления шаговым двигателем
В современном мире всё большую роль играет автоматизация процессов. Для этого необходимо преобразовывать сигналы управления в механические движения. Одним из способов достижения данной цели является использование шаговых двигателей.
Шаговый двигатель — это электромеханичское устройство, которое преобразует электрические импульсы в дискретные механические перемещения.
Преимущества применения шаговых двигателей
- угол поворота ротора определяется числом импульсов, которые поданы на двигатель;
- если обмотки запитаны, то двигатель в режиме остановки обеспечивает полный момент;
- хорошие шаговые двигатели обеспечивают точность 3-5% от величины шага, при этом ошибка не накапливается от шага к шагу;
- возможность быстрого старта/остановки/реверсирования;
- высокая надежность, связанная с отсутствием щеток, срок службы шагового двигателя фактически определяется сроком службы подшипников;
- однозначная зависимость положения от входных импульсов обеспечивает позиционирование без обратной связи;
- возможность получения очень низких скоростей вращения для нагрузки, присоединенной непосредственно к валу двигателя без промежуточного редуктора;
- может быть перекрыт довольно большой диапазон скоростей, скорость пропорциональна частоте входных импульсов.
Недостатки применения шаговых двигателей
- шаговым двигателем присуще явление резонанса;
- из-за работы без обратной связи возможна потеря контроля положения, поэтому рекомендуется дополнять системы управления шаговым двигателем энкодером;
- потребление энергии не уменьшается даже без нагрузки;
- затруднена работа на высоких скоростях;
- невысокая удельная мощность;
- относительно сложная схема управления.
Применение шаговых двигателей:
- приводы осей координатных столов и манипуляторов;
- системы линейного перемещения;
- упаковочные и конвейерное оборудование;
- оборудование для текстильного и пищевого производств;
- полиграфическое оборудование;
- устройство подачи, дозирования;
- сварочные автоматы.
Принцип работы шагового двигателя
Основной принцип работы шагового двигателя заключается в следующем — двухполюсный ротор электродвигателя, сделанный из специальной магнитомягкой стали, располагается в четырехполюсном статоре.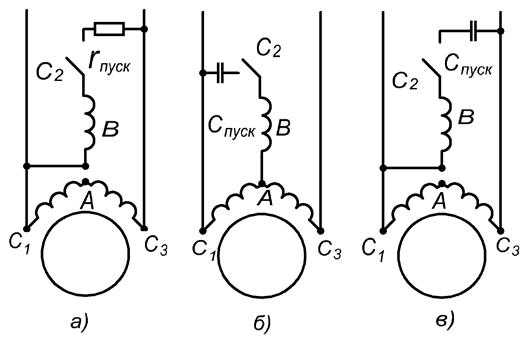 Первая полюсная пара сделана из магнитов (постоянных), на второй паре имеется обмотка управления шаговым электродвигателем. В то время, когда ток в обмотках управления отсутствует, ротор двигателя располагается вдоль магнитов и стабильно удерживается с некоторым усилием (зависящее от силы магнитного потока).
Первая полюсная пара сделана из магнитов (постоянных), на второй паре имеется обмотка управления шаговым электродвигателем. В то время, когда ток в обмотках управления отсутствует, ротор двигателя располагается вдоль магнитов и стабильно удерживается с некоторым усилием (зависящее от силы магнитного потока).
Как только осуществляется подача напряжения (постоянного) на обмотку управления шаговым электродвигателем, появляется магнитный поток, что больший магнитного потока имеющихся постоянных магнитов. Под воздействием усилия (электромагнитного) ротор начинает менять угол, стараясь войти в положение соосное с полюсами обмотки управления. Последующий импульс управления полностью отключает электрическое напряжение с обмотки управления. Вследствие этого ротор движка движется под воздействием магнитного потока магнитов.
В данной работе описывается алгоритм управления шаговыми двигателями двухфазного (биполярного) и четырёхфазного (униполярного) типа с помощью модуля управления шаговым двигателем с интерфейсом CAN ZET 7160-S StepMotor-CAN или интерфейсом RS-485 ZET 7060-S StepMotor-485.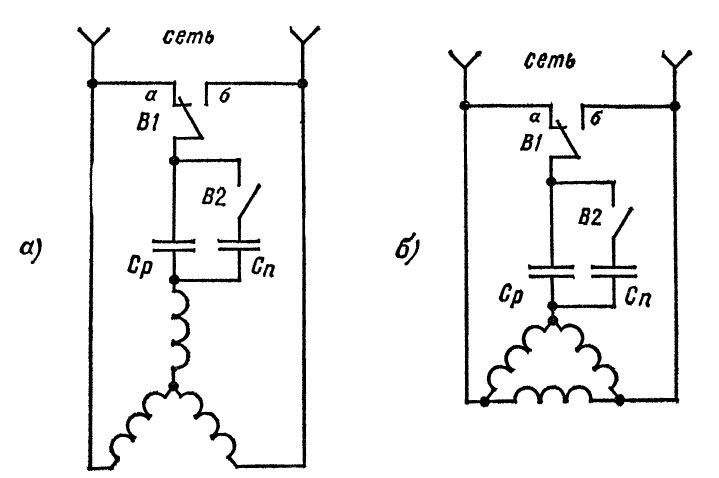
Биполярный (двухфазный) шаговый двигатель
Двухфазный шаговый двигатель (биполярный шаговый двигатель) имеет одну обмотку в каждой фазе, которая для изменения направления магнитного поля должна переполюсовываться драйвером. Для такого типа двигателя требуется мостовой драйвер, или полумостовой с двухполярным питанием. Всего биполярный двигатель имеет две обмотки и, соответственно, четыре вывода.
| Рис. 1 Внутренняя схема биполярного Ш.Д. | Рис. 2 Схема выводов биполярного Ш.Д. | Рис. 3 Схема подключения биполярного Ш.Д. к ZET7X60-S |
Униполярный (четырёхфазный) шаговый двигатель
Четырёхфазный шаговый двигатель (униполярный шаговый двигатель) также имеет одну обмотку в каждой фазе, но от середины обмотки сделан отвод. Это позволяет изменять направление магнитного поля, создаваемого обмоткой, простым переключением половинок обмотки. При этом существенно упрощается схема драйвера.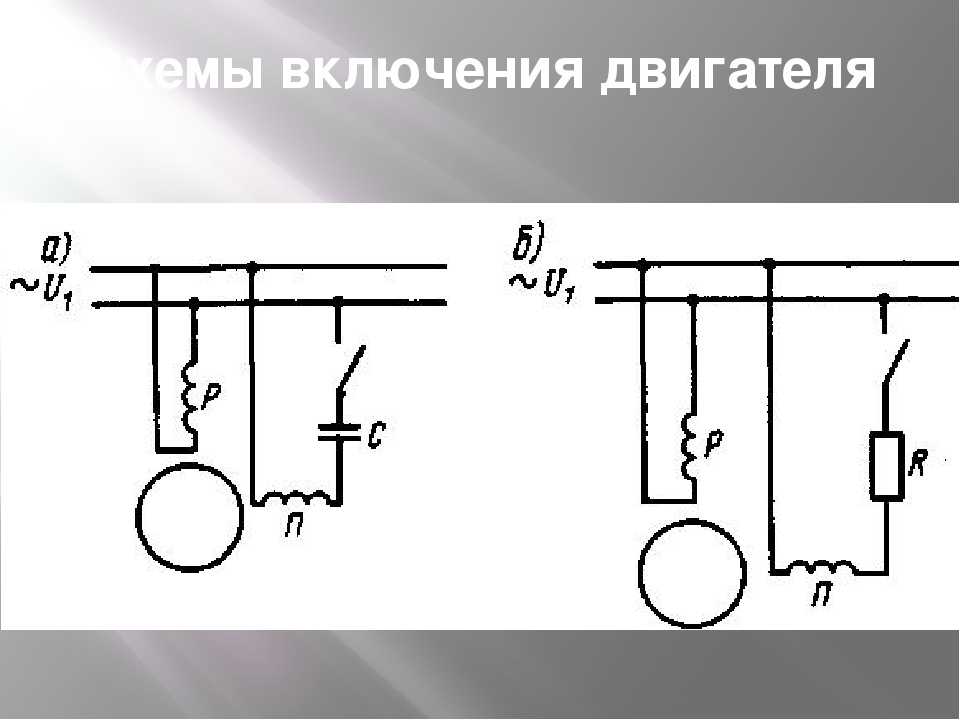 Драйвер должен иметь только 4 простых ключа. Таким образом, в униполярном двигателе используется другой способ изменения направления магнитного поля. Средние выводы обмоток могут быть объединены внутри двигателя, поэтому такой двигатель может иметь 5 или 6 выводов.
Драйвер должен иметь только 4 простых ключа. Таким образом, в униполярном двигателе используется другой способ изменения направления магнитного поля. Средние выводы обмоток могут быть объединены внутри двигателя, поэтому такой двигатель может иметь 5 или 6 выводов.
| Рис. 4 Внутренняя схема униполярного Ш.Д. | Рис. 5 Схема выводов униполярного Ш.Д. | Рис. 6 Схема подключения униполярного Ш.Д. к ZET7X60-S |
Режимы работы шагового двигателя
Существует несколько способов управления фазами шагового двигателя. Наиболее распространёнными из них являются полношаговый и полушаговый режим. Существуют также режимы управления с 1/4, 1/8, 1/16 шага. Но эти режимы нужны только для узкого круга задач, и они требуют значительного усложнения схемы микроконтроллера и алгоритма управления. Ниже приводится последовательность генерируемых импульсов для различных режимов работы шагового двигателя, на примере униполярного двигателя.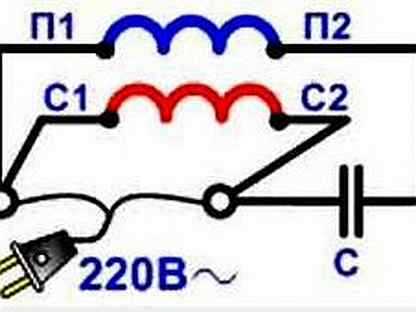
Рис. 7 Полношаговый режим, с 1-ой активной обмоткой на каждом шаге
Рис. 8 Полношаговый режим, с 2-мя активными обмотками на каждом шаге
Рис. 9 Полушаговый режим
Разгон и торможение шагового двигателя
Такой параметр шагового двигателя, как зависимость момента от скорости является важнейшим при выборе типа двигателя, выборе метода управления фазами и выборе схемы драйвера. При конструировании высокоскоростных драйверов шаговых двигателей нужно учитывать, что обмотки двигателя представляют собой индуктивность. Эта индуктивность определяет время нарастания и спада тока. Поэтому если к обмотке приложено напряжение прямоугольной формы, форма тока не будет прямоугольной. При низких скоростях (рис. 10а) время нарастания и спада тока не способно сильно повлиять на момент, однако на высоких скоростях момент падает. Связано это с тем, что на высоких скоростях ток в обмотках двигателя не успевает достигнуть номинального значения (рис. 10б).
10б).
Рис. 10 Зависимость тока в обмотках Ш.Д. от частоты
Таким образом, для работы с шаговым двигателем на большой скорости необходимо выполнять его разгон и замедление, в противном случае произойдёт потеря синхронности между шаговым двигателем и контроллером, и положение ротора шагового двигателя будет утеряно.
Управление шаговым двигателем с помощью модуля ZET7X60-S StepMotor
Перед началом работы с шаговым двигателем необходимо выставить необходимые параметеры на вкладке «Настройки»:
- Частота опроса — частота, с которой будет обновляться информация в канале о количестве проделанных шагов;
- Тип двигателя — тип двигателя, подключенного к модулю ZET 7X60-S StepMotor.
После этого с помощью вкладки «Управление» можно начинать управление шаговым двигателем.
- Старт/Стоп — начать /остановить движение шагового двигателя;
- Направление вращения — задаём направление вращения шагового двигателя, по или против часовой стрелки;
- Кол-во шагов до остановки — количество шагов, которое проделает шаговый двигатель после запуска;
- Время одного шага — скорость вращения шагового двигателя.

| Рис. 11 Вкладка «Настройки» в программе MODBUS-ZETLAB | Рис. 12 Вкладка «Управление» в программе MODBUS-ZETLAB |
Во время выполнения команды, контроллер сообщает о количестве проделанных шагов на данный момент с частотой заданной в настройках (Настройки —> Частота опроса).
Рис. 13 Отображение количества проделанных шагов в программе ZETLAB «Многоканальный осциллограф»
Система управления шаговым двигателем с обратной связью
Система управления шаговым двигателем с обратной связью строится на базе модуля управления шаговым двигателем ZET 7060-S StepMotor-485 (ZET 7160-S StepMotor-CAN) и интеллектуального энкодера ZET 7060-E Encoder-485 (ZET 7160-E Encoder-CAN). Для подключения к системе ZETLAB
используется преобразователь интерфейса ZET 7070. Управление шаговым двигателем осуществляется подачей сигналов с модуля ZET7060-S StepMotor-485 (ZET 7160-S StepMotor-CAN). Контроль состоянием шагового двигателя осуществляется энкодером, сигнал с которого обрабатывается модулем ZET 7060-E Encoder-485 (ZET 7160-E Encoder-CAN). Обработка сигналов с интеллектуального энкодера и программное управление модулем ZET7060-S StepMotor-485 (ZET 7160-S StepMotor-CAN) осуществляется с помощью программного обеспечения
Контроль состоянием шагового двигателя осуществляется энкодером, сигнал с которого обрабатывается модулем ZET 7060-E Encoder-485 (ZET 7160-E Encoder-CAN). Обработка сигналов с интеллектуального энкодера и программное управление модулем ZET7060-S StepMotor-485 (ZET 7160-S StepMotor-CAN) осуществляется с помощью программного обеспечения
ZETLAB
.
Схема системы управления шаговым двигателем с обратной связью
Состав системы управления шаговым двигателем с обратной связью
| Описание |
| Управляющий модуль ZET 7060-S StepMotor-485 или ZET 7160-S StepMotor-CAN Цифровой модуль управления шаговым двигателем с интерфейсом RS-485 или CAN. |
| Датчик углового перемещения Преобразование углового перемещения в последовательность электрических сигналов, содержащих информацию о величине и направлении этого перемещения. Диаметр корпуса 50 мм. Разрешающая способность до 320000 дискрет на оборот. |
Измерительный модуль ZET 7060-E Encoder-485 или ZET 7160-E Encoder-CAN Преобразование сигнала с датчика в значения углового перемещения и передача этих данных по протоколу Modbus по интерфейсу RS-485 или CAN 2. 0. 0. |
| ZET 7070 RS-485↔USB или ZET 7174 CAN-USB Модуль передачи данных с измерительных модулей на ПК |
| MODBUS OPC Сервер Программа «Сервер данных интеллектуальных датчиков» |
| Кабели для подключения измерительных и управляющих модулей к ZET 7070 или ZET 7174 |
| Программное обеспечение ZETLAB Программы для отображения результатов измерений интеллектуальных датчиков в численном и графическом виде на плоскости и в объеме. |
| SCADA ZETVIEW Графическая среда разработки приложений для автоматизации измерений |
Однофазный асинхронный двигатель
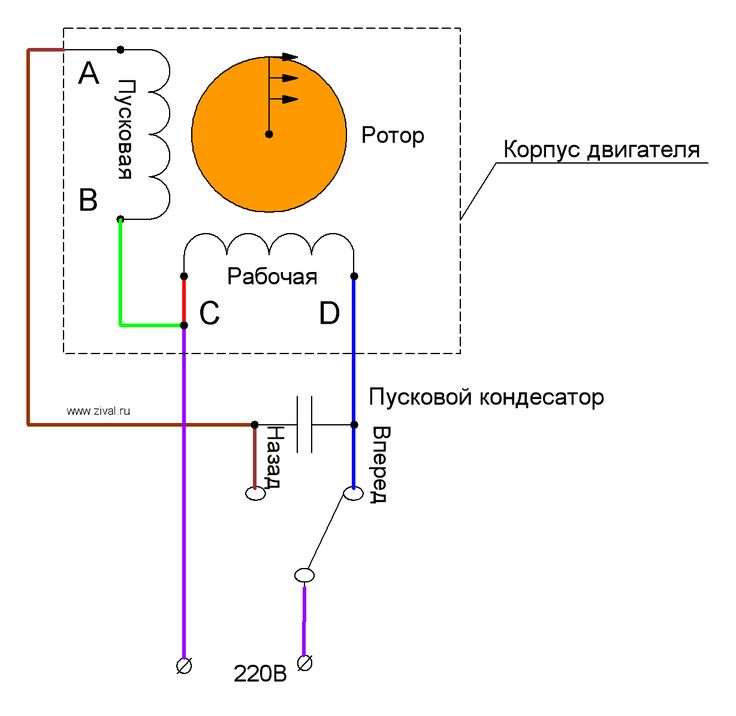
Фактически, любой асинхронный электродвигатель является трехфазным и предусматривает подключение к трехфазной сети с напряжением 380 В. Однофазным или двухфазным его называют при подключении к однофазной электросети с напряжением 200 В, когда питание подается лишь на две обмотки. В такой схеме на основную рабочую обмотку подается чистая фаза от сети, а на другую питание идет через фазосдвигающий элемент, как правило, конденсатор. Такая схема позволяет создать необходимую индукцию для смещения ротора и запустить асинхронный двигатель от однофазной сети. Для дальнейшей его работы даже необязательно, чтобы пусковая обмотка (которую подключают через конденсатор) оставалась под напряжением.
Такая схема позволяет создать необходимую индукцию для смещения ротора и запустить асинхронный двигатель от однофазной сети. Для дальнейшей его работы даже необязательно, чтобы пусковая обмотка (которую подключают через конденсатор) оставалась под напряжением.
Дело в том, что трехфазный асинхронный двигатель продолжает функционировать (под малой нагрузкой) даже если во время работы от него отключить подачу энергии по одному из питающих проводов, сымитировав таким образом работу от однофазной сети. Это обусловлено тем, что результирующее магнитное поле сохраняет вращение.
Асинхронный двухфазный электродвигатель
Двухфазные асинхронные двигатели: а — с короткозамкнутым ротором; б — с полым ротором
Схема подключения второй обмотки через резистор
Вращающиеся магнитные поля могут быть созданы и двухфазными обмотками, если эти обмотки пространственно смещены на 90° друг относительно друга. Если эти обмотки питать двумя токами, смещёнными на 90° по фазе, то получается, как и в трехфазном электродвигателе, вращающееся магнитное поле.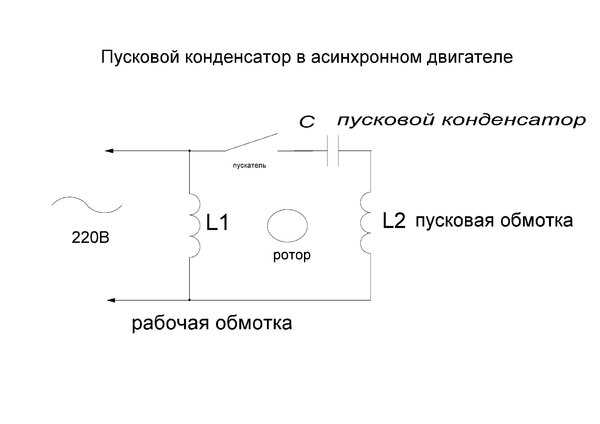
В двухфазном электродвигателе создается вращающий момент, обусловленный токами, вызванными вращающимся магнитным полем в стержнях ротора электродвигателя. Ротор получает ускорение до тех пор, пока он — как и в трёхфазном асинхронном двигателе — не достигнет определенной конечной частоты вращения, которая ниже частоты вращения поля.
Если обе обмотки статора питать от одной и той же сети однофазного тока, то сдвиг фазы в одной из обмоток, необходимый для получения вращающегося поля, может быть реализован последовательным включением конденсатора с достаточной емкостью[1]. На рисунке показана схема двухфазного асинхронного двигателя с конденсатором при питании от сети переменного тока.
Сдвиг фазы в одной из обмоток можно получить и последовательным включением резистора, но в этом случае увеличиваются потери активной мощности. Также сдвиг фазы получается, если взамен внешнего резистора на полюсе (или полюсах) одной из обмоток размещается короткозамкнутый виток. В этом случае увеличиваются потери активной мощности в соответствующей обмотке, зато исключается внешний резистор. Такие двигатели обычно имеют небольшую мощность и используются, например, в бытовых вентиляторах[2].
Такие двигатели обычно имеют небольшую мощность и используются, например, в бытовых вентиляторах[2].
В настоящее время расширилась сфера применения двухфазного асинхронного двигателя в виде электродвигателя с полым ротором. В таком электродвигателе вместо обычного короткозамкнутого ротора применяется алюминиевый цилиндр, который может вращаться в воздушном зазоре между внешним и внутренним статорами.
Вращающееся поле вызывает в алюминиевом цилиндре вихревые токи, которые, взаимодействуя с магнитным полем в воздушном зазоре, создают вращающий момент. Цилиндр достигает конечной асинхронной частоты вращения, которая соответствует нагрузке на валу.
Небольшой момент инерции ротора электродвигателя обусловливает благоприятные рабочие характеристики. Электродвигатели с полым ротором рассчитаны прежде всего на небольшие мощности и применяются для автоматического регулирования в компенсационных и мостовых схемах. Одна из обмоток вместе с конденсатором подключается к сети с напряжением, а на вторую обмотку подается управляющее напряжение.
Подключение преобразователя частоты и однофазного двигателя
В такой схеме есть ряд существенных недостатков:
- Запуск двигателя происходит при минимальной частоте 30 Гц;
- Частоту ниже 30 Гц можно регулировать, но не рекомендуется, очень вредно для движка;
- Есть нюанс с настройкой пускового напряжения, требуется немного загрублять параметр;
Для решения вопроса с подключением двух устройств поможет нам обычный дроссель. Катушка индуктивности поможет нам подавить ёмкость в схеме, таким образом давая возможность частотнику спокойно подавать синусоиду на движок. Да, вот схема:
Всё элементарно, правда. Видео, к сожалению не сохранилось. Выкладываю фото с ПЧ Eaton и однофазным насосом.
Производителей ПЧ в мире очень много. Поэтому из настроек я могу направить вас примерно и в общих чертах, если будут возникать проблемы с подключениями. Основная мысль заключается в том, что при пуске двигателя минимальное напряжение и частоту поднять вверх. Но делать это нужно осторожно и аккуратно, есть шанс спалить мотор.
Но делать это нужно осторожно и аккуратно, есть шанс спалить мотор.
И еще рекомендую ограничить минимальную частоту на 30 Гц, чтобы не допустить запуска вхолостую и перегрева. Двигатель начинает сильно греться, при пуске на низких частотах.
На этом у меня всё, друзья…
Мне очень нравится кататься на велосипеде. Ещё больше — модернизировать, добавлять что-то новое и интересное. Я совсем недавно в просторах интернета нашёл комплект электромотора для заднего колеса. Комплекты существуют, как и для переднего колеса, так и для заднего:
Загорелся идеей поставить и на свой велобайк. Может кто сталкивался? Кто-то ставил? Хочу увидеть ваше мнение… Пишите в комментариях.
Надеюсь моя статья помогла вам определиться с выбором подключения однофазного двигателя? Если что-то не дописал, напишите в комментариях, исправлю…)
P.S. Небольшой анонс следующей статьи:
Широкая доступность фотоустройств породила новую проблему — потребность в эффективных инструментах цифрового монтажа. На этом рынке традиционно доминирует профессиональный графический пакет Adobe Photoshop. Но, не стоит ограничивать свой кругозор только им. Существует огромное количество достойных фоторедакторов, покрывающих 90% повседневных нужд фотографов-любителей.
На этом рынке традиционно доминирует профессиональный графический пакет Adobe Photoshop. Но, не стоит ограничивать свой кругозор только им. Существует огромное количество достойных фоторедакторов, покрывающих 90% повседневных нужд фотографов-любителей.
Спасибо за то, что читаете мои статьи! Всего вам доброго!!
С уважением, Гридин Семён
Преобразователь частоты переменного тока уже много лет применяются при строительстве электромеханических приборов и агрегатов. Они позволяют модулировать частоту для того, чтобы регулировать скорость вращения вола электрического двигателя.
Частотники позволили подключать трёхфазный электрический двигатель к однофазной сети питания, при этом, не теряя мощности. При старинном типе подключения, через емкий конденсатор, большая часть мощности двигателя терялась, КПД существенно снижалось, обмотки электрического двигателя сильно перегревались.
Всех этих проблем удалось избежать, применением частотного преобразователя. При этом очень важно соблюдать правильное подключение частотного преобразователя к электрическому двигателю.
Некоторые особенности подключения любого частотника в связку с электрическим двигателем.
Существуют ли двухфазные преобразователи частоты
Содержание:
- Особенности однофазных асинхронных двигателей
Асинхронные двигатели получили широкое применение и в промышленности, и в быту. Сфера применения их достаточно широка, что объясняется относительной простотой конструкции и минимальным обслуживанием такого мотора в процессе эксплуатации. Они используются в различных сферах и изготавливаются в широком диапазоне мощностей и питающих напряжений. Принцип работы такого электродвигателя также достаточно прост: обмотки статора создают вращающееся электромагнитное поле, за которым, благодаря вихревым токам в роторе и создаваемым ими электромагнитным полем, ротор вращается и частота его оборотов стремится сравняться с частотой вращения электромагнитного поля статора.
В асинхронных двигателях, где используется три обмотки для генерации поля, питающихся от трехфазной промышленной сети, нет никаких проблем с пуском и определением направления вращения мотора.
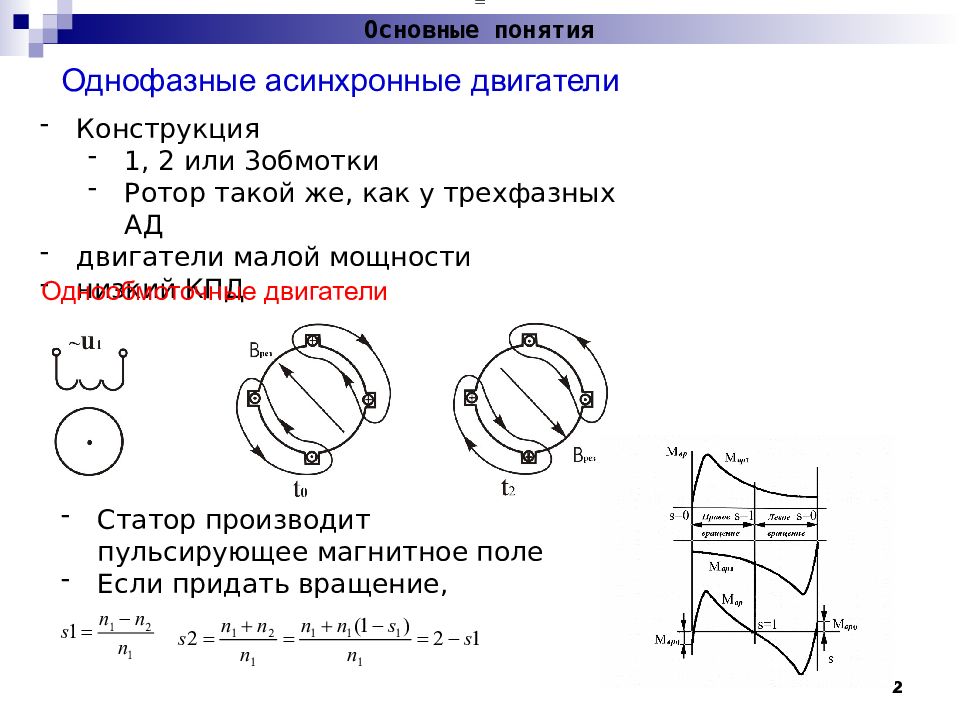
В случае однофазного асинхронного двигателя не все так просто, поскольку одна питающая фаза генерирует переменное поле, которое не вращается и часто его рассматривают как два встречно вращающихся поля, равных по значению и противоположных по направлению. Поэтому пуск двигателя одной обмоткой невозможен, но, если придать начальное вращение ротору, оно будет поддерживаться таким переменным полем, и частота вращения будет стремиться к частоте питающей сети. Поэтому используют дополнительную обмотку, расположенную под углом 90 градусов, которая компенсирует одно из двух вращающихся полей, в результате создается одно вращающееся электромагнитное поле, способное раскрутить ротор.
Современный однофазный двигатель асинхронного типа состоит из:
-
одной главной обмотки;
-
вспомогательной пусковой обмотки, питание которой может отключаться после запуска;
-
фазосдвигающих элементов.
Именно наличие двух обмоток часто приводит к тому, что такие двигатели называют двухфазными и, соответственно для их управления часто ищут двухфазный частотный преобразователь, которых в серийном производстве просто нет, поскольку отдельное управление пусковой обмоткой нецелесообразно. Поэтому вместо теоретически возможного двухфазного преобразователя для управления однофазными асинхронными двигателями с пусковой обмоткой используют:
-
специализированные однофазные преобразователи, которые рассчитаны на подключение к однофазной сети и на выходе дают одну фазу с регулируемыми параметрами частоты и напряжения;
-
некоторые модели трехфазных преобразователей, которые допускают управление однофазной нагрузкой.
Вариант не самый оптимальный, поскольку используется дорогое оборудование, имеющие однофазные аналоги, которые значительно дешевле. К тому же, не каждый трехфазный частотник может работать с однофазным двигателем, и при выборе нужно учитывать этот момент.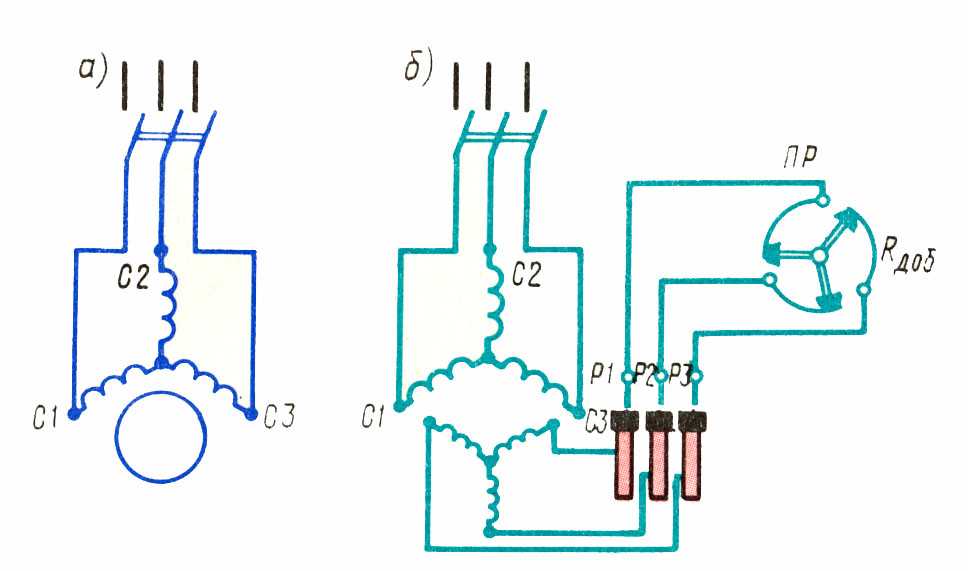
Также нужно учитывать тот факт, что управление однофазным мотором даже с помощью инвертора не дает такого же уровня управляемости, как у трехфазных двигателей. В общем случае придется столкнуться с такими проблемами:
-
ограниченность диапазона управления частотой без значительной потери мощности или перегрева мотора;
-
ограничения в режимах пуска и старта двигателя;
-
невозможность изменения направления вращения при конденсаторной схеме сдвига фазы без перекоммутации обмоток.
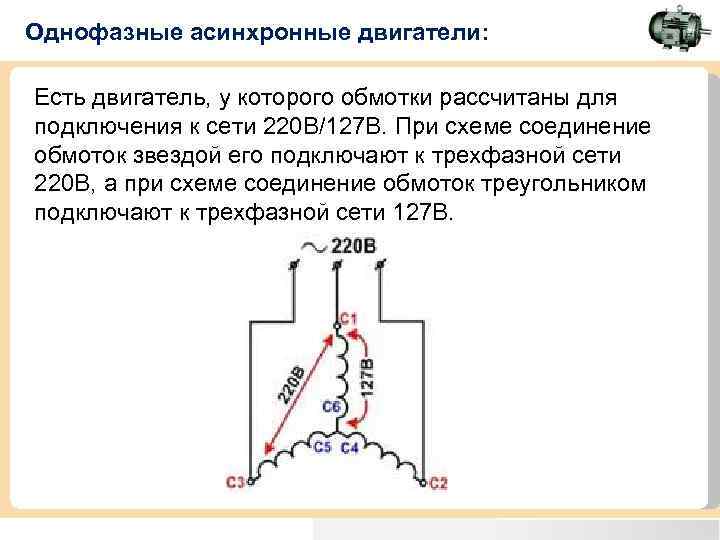
И еще одна небольшая рекомендация. Часто в качестве двигателя, который питается от однофазной сети, используют обычный трехфазник, обмотки которого коммутируют по схеме “треугольника”. Если вы столкнулись именно с таким вариантом – самым оптимальным решением будет подключение такого двигателя по трехфазной схеме к однофазной сети через специализированный частотный преобразователь. В этом случае вы получите максимальную управляемость и экономичность системы.
Часто в качестве двигателя, который питается от однофазной сети, используют обычный трехфазник, обмотки которого коммутируют по схеме “треугольника”. Если вы столкнулись именно с таким вариантом – самым оптимальным решением будет подключение такого двигателя по трехфазной схеме к однофазной сети через специализированный частотный преобразователь. В этом случае вы получите максимальную управляемость и экономичность системы.
вернуться в блог
Могу ли я использовать любой конденсатор для двухфазного двигателя переменного тока?
\$\начало группы\$
Итак, недавно попал в руки старый моторчик насоса, к сожалению схема подключения отсутствует. Я уже определил, что это двухфазный двигатель, и для его работы мне нужен конденсатор для работы двигателя.
Однако мне интересно, могу ли я использовать любой конденсатор для запуска двигателя или мне нужен конденсатор с определенной емкостью, чтобы получить разность фаз 90 градусов? Если это будет важно, я живу в районе с 230 В переменного тока вне стены.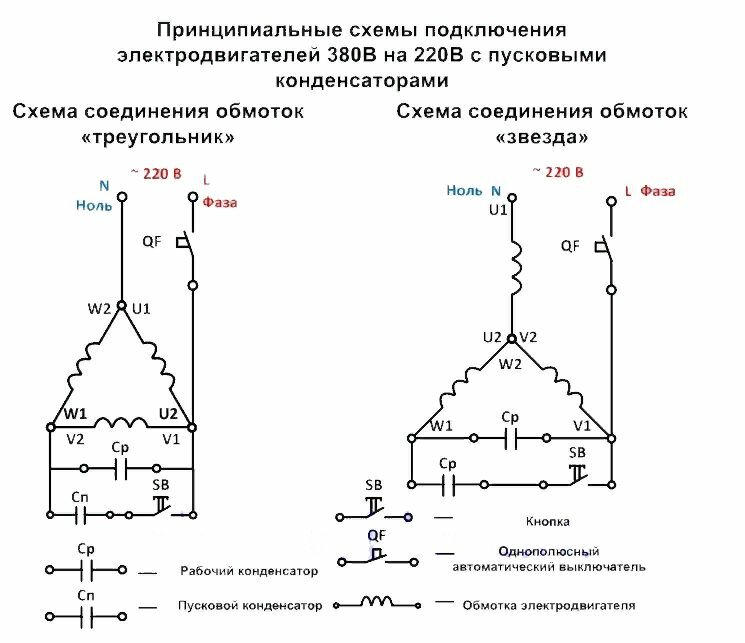
Спасибо за любую помощь/советы
PS: я добавил фотографии статора;
- конденсатор
- двигатель
- переменный ток
- емкость
- фаза
\$\конечная группа\$
3
\$\начало группы\$
Да, нужна кепка. Кепка должна быть оценена для работы. Потребуется колпачок из металлической пленки на 250 В переменного тока или выше.
Фазовый сдвиг никогда не составляет ровно 90 градусов, но это и не обязательно. Необходимая емкость примерно пропорциональна размеру двигателя. Если у вас маленькая кепка, вы все равно получите пусковой крутящий момент, но не очень большой. Если ваша крышка слишком велика, вы получите больший пусковой момент, но вы увеличите потребление тока без нагрузки и рискуете сжечь двигатель. Крутящий момент не сильно зависит от максимального значения.
Если ваша нагрузка «легкая», как вентилятор, у вас есть широкий диапазон емкости для работы. Если ваша нагрузка «жесткая», как у поршневого компрессора, вам придется правильно установить крышку, чтобы двигатель запускался под нагрузкой. При отсутствии нагрузки на стенде вы можете начать с 10 мкФ и продолжить дальше.
\$\конечная группа\$
3
Зарегистрируйтесь или войдите в систему
Зарегистрируйтесь с помощью Google
Зарегистрироваться через Facebook
Зарегистрируйтесь, используя электронную почту и пароль
Опубликовать как гость
Электронная почта
Требуется, но не отображается
Опубликовать как гость
Электронная почта
Требуется, но не отображается
Нажимая «Опубликовать свой ответ», вы соглашаетесь с нашими условиями обслуживания, политикой конфиденциальности и политикой использования файлов cookie
.
Шаговые двигатели — Сравнение 2-фазных и 5-фазных гибридных шаговых двигателей
Вы сузили область поиска решения для управления движением до шагового двигателя. Теперь пришло время решить, 2-фазный или 5-фазный? ORIENTAL MOTOR производит двухфазные (1,8°/0,9°) и 5-фазные (0,72°/0,36°) шаговые двигатели и драйверы. Наш опыт в обеих технологиях дает нам уникальную перспективу. Компания ORIENTAL MOTOR провела быстрое сравнение характеристик, чтобы прояснить путаницу и мифы, связанные с дебатами о двухфазном и пятифазном двигателях. Руководство охватывает основные различия между обеими технологиями в ключевых областях производительности шагового двигателя: разрешение, вибрация, крутящий момент, точность и синхронность. Опытный персонал службы технической поддержки ORIENTAL MOTOR также готов предоставить более подробные разъяснения по обеим технологиям.
2-фазный, 5-фазный, в чем разница?
Между 2-фазными и 5-фазными шаговыми двигателями есть два основных различия. Первый — механический. Шаговый двигатель состоит в основном из двух частей, статора и ротора. Ротор, в свою очередь, состоит из трех компонентов; чашка ротора 1, чашка ротора 2 и постоянный магнит. В 2-фазном двигателе статор состоит из 8 магнитных полюсов с маленькими зубьями, а статор 5-фазного двигателя состоит из 10 магнитных полюсов. Полюса в статоре снабжены обмоткой.
Первый — механический. Шаговый двигатель состоит в основном из двух частей, статора и ротора. Ротор, в свою очередь, состоит из трех компонентов; чашка ротора 1, чашка ротора 2 и постоянный магнит. В 2-фазном двигателе статор состоит из 8 магнитных полюсов с маленькими зубьями, а статор 5-фазного двигателя состоит из 10 магнитных полюсов. Полюса в статоре снабжены обмоткой.
Второе различие между 2-фазным и 5-фазным — это количество фаз. Двухфазный двигатель имеет две фазы, фазу «А» и фазу «В», а пятифазный двигатель имеет пять фаз. По сути, количество фаз относится к различным комбинациям полюсов, на которые последовательно подается напряжение для притяжения ротора.
2-фазный и 5-фазный Прямолинейный
Как эти различия влияют на производительность? На работу шагового двигателя влияет ряд факторов. Существует несколько способов управления шаговым двигателем, и привод сильно влияет на производительность двигателя. Волновой привод, полный шаг, полушаг и микрошаг являются наиболее распространенными методами привода, и каждый из них предлагает очень разные характеристики. Без учета различных методов привода здесь приведены ключевые области производительности для 2-фазных и 5-фазных шаговых двигателей.
Без учета различных методов привода здесь приведены ключевые области производительности для 2-фазных и 5-фазных шаговых двигателей.
Разрешение
Конструктивно 5-фазный шаговый двигатель мало чем отличается от 2-фазного двигателя. Ротор обоих двигателей имеет 50 зубьев. Разница в том, что, поскольку 5-фазный двигатель имеет 10 полюсов, по 2 на фазу, ротор должен переместиться только на 1/10 шага зубьев, чтобы выровняться со следующей фазой. В двухфазном двигателе ротор должен сместиться на 1/4 шага зубьев, чтобы выровняться со следующей фазой (8 полюсов, по 4 на фазу).
Это приводит к тому, что 2-фазный двигатель имеет 200 шагов на оборот, 1,8° на шаг, а 5-фазный имеет 500 шагов на оборот, 0,72° на шаг. Повышенное разрешение 5-фазного преобразователя заложено в его конструкции. В сочетании с микрошаговым драйвером 5-фазный двигатель может делать шаги всего 0,00288°, однако точность позиционирования и повторяемость по-прежнему зависят от механической точности двигателя. Механическая точность как 2-фазного, так и 5-фазного двигателя составляет ± 3 угловых минуты (0,05°).
Механическая точность как 2-фазного, так и 5-фазного двигателя составляет ± 3 угловых минуты (0,05°).
Вибрация
Из-за меньшего угла шага в 5-фазных шаговых двигателях, 0,72° против 1,8° в 2-фазном двигателе, вибрация в 5-фазном двигателе намного меньше, чем в 2-фазном. На графике справа показана вибрация, создаваемая 5-фазным двигателем, по сравнению с вибрацией, создаваемой 2-фазным шаговым двигателем. Как видите, двухфазный двигатель производит гораздо больше вибрации.
*Графики справа представляют собой микрошаги с частотой 5000 шагов на оборот. Эти графики были созданы путем присоединения генератора к двигателю с двойным валом. Когда двигатель вибрирует, генерируемое напряжение строится на графике. Чем сильнее вибрировал двигатель, тем больше генерируемое напряжение.
Крутящий момент
Хотя разница между выходным крутящим моментом двухфазного шагового двигателя и пятифазного шагового двигателя незначительна, пятифазный двигатель имеет более «полезный» крутящий момент. Это в первую очередь связано с величиной пульсаций крутящего момента, создаваемых обоими двигателями.
Это в первую очередь связано с величиной пульсаций крутящего момента, создаваемых обоими двигателями.
Полушаговый или микрошаговый 5-фазный шаговый двигатель фактически увеличивает крутящий момент до 10% из-за включения большего количества фаз. 2-фазные двигатели будут терять крутящий момент до 40% при полушаге и микрошаге, однако многие 2-фазные драйверы компенсируют это за счет перегрузки противоположного вектора крутящего момента.
Когда статор находится под напряжением, он создает электромагнит, который притягивает магнитный поток ротора. Магнитный поток можно разбить на два вектора: нормальный и тангенциальный. Крутящий момент создается только при наличии тангенциальной составляющей. Наличие тангенциального потока показано на рисунке ниже.
В рис. 1 зубья ротора выровнены непосредственно с зубьями статора, а поток имеет только нормальную составляющую, поэтому крутящий момент не создается. Поскольку зубья ротора смещены от зубьев статора в рис. 2, 3 и 4 двигатель создает крутящий момент. Мы называем этот крутящий момент отрицательным, потому что крутящий момент пытается вернуть зубы в стабильное положение. В рис. 5 поток равномерно распределяется между зубьями статора, и крутящий момент не создается. На рис. 6, 7 и 8 положительный крутящий момент создается, когда смещенные зубья ротора перемещаются, чтобы выровняться со следующими зубьями статора. Наконец, зубья ротора точно совпадают со следующими зубьями статора ( рис. 1 ).
2, 3 и 4 двигатель создает крутящий момент. Мы называем этот крутящий момент отрицательным, потому что крутящий момент пытается вернуть зубы в стабильное положение. В рис. 5 поток равномерно распределяется между зубьями статора, и крутящий момент не создается. На рис. 6, 7 и 8 положительный крутящий момент создается, когда смещенные зубья ротора перемещаются, чтобы выровняться со следующими зубьями статора. Наконец, зубья ротора точно совпадают со следующими зубьями статора ( рис. 1 ).
Каждая фаза двигателя влияет на синусоидальную кривую смещения крутящего момента на общий выходной крутящий момент двигателя (показано ниже). Разница между пиком и впадиной называется пульсацией крутящего момента. Пульсации крутящего момента вызывают вибрацию, поэтому чем больше разница, тем сильнее вибрация.
Благодаря большему количеству фаз, влияющих на общий крутящий момент двигателя, пульсации крутящего момента в 5-фазном двигателе значительно меньше, чем в 2-фазном двигателе. Разница между пиком и впадиной в двухфазном двигателе может достигать 29%, в то время как 5-фазный составляет всего около 5%. Поскольку пульсации крутящего момента напрямую влияют на вибрацию, 5-фазный двигатель работает более плавно, чем 2-фазный.
Разница между пиком и впадиной в двухфазном двигателе может достигать 29%, в то время как 5-фазный составляет всего около 5%. Поскольку пульсации крутящего момента напрямую влияют на вибрацию, 5-фазный двигатель работает более плавно, чем 2-фазный.
2-фазное смещение по крутящему моменту
5-фазное смещение по крутящему моменту
Точность / Повторяемость
Имеет две составляющие, электрическую и механическую точность. Электрическая ошибка вызвана дисбалансом фаз. Например, сопротивление обмотки двигателя имеет спецификацию ± 10%, возможно, что, хотя двигатель рассчитан на 10 Вт, одна фаза может быть 9.2 Вт, а другая фаза может быть 10,6 Вт. Эта разница между фазами заставит ротор ориентироваться больше на одну фазу, чем на другую.
Механическая ошибка состоит из нескольких компонентов, основным из которых является конфигурация зуба. Хотя зубья на двигателе должны быть квадратными, процесс штамповки и возраст штампа могут привести к тому, что некоторые зубья или части зубьев будут закруглены.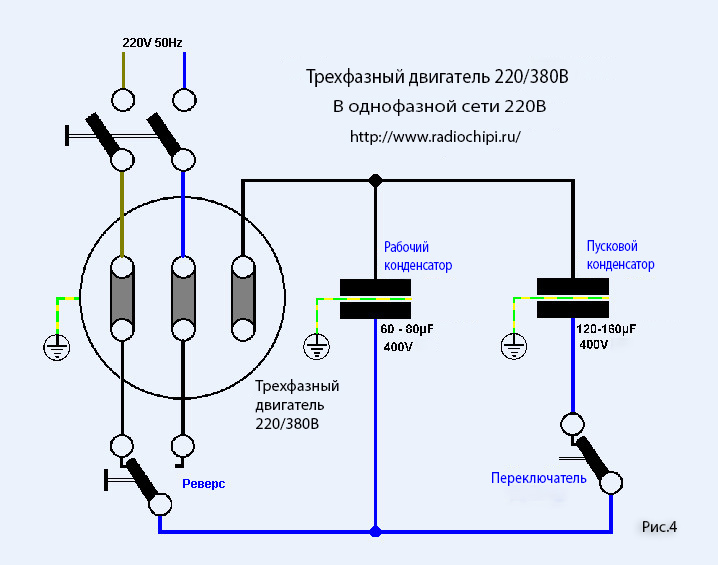 Вместо прямого магнитного потока он может течь в другом месте, когда зубья закруглены. Таким образом, эти факторы влияют на точность двигателя.
Вместо прямого магнитного потока он может течь в другом месте, когда зубья закруглены. Таким образом, эти факторы влияют на точность двигателя.
При использовании полношагового привода состояния двухфазного двигателя повторяются каждые 4 шага, а состояния пятифазного двигателя повторяются каждые 10 шагов. Любая электрическая ошибка, вызванная дисбалансом фаз, сбрасывается на каждом 4-м шаге в 2-фазном и на каждом 10-м шаге в 5-фазном, оставляя только механическую ошибку.
После того, как двигатель завершит полный оборот на 360°, тот же зуб теперь выровняется в исходной начальной точке, что устраняет механическую ошибку. Поскольку двухфазный двигатель делает 200 шагов на оборот, он почти идеален каждые 200 шагов, в то время как 5-фазный двигатель делает 500 шагов на оборот и почти идеален каждые 500 шагов.
Синхронизм
Поскольку 5-фазный шаговый двигатель перемещается только на 0,72° за шаг, для 5-фазного двигателя практически невозможно пропустить шаг из-за превышения/недорегулирования. Двигатель потеряет синхронность или пропустит шаг, если зубья на роторе не совпадают с правильными зубьями на статоре. Что может привести к неправильному расположению зубов? Во-первых, для того, чтобы зуб ротора не выровнялся должным образом, другой зуб должен выровняться там, где он должен быть. Для того чтобы это произошло, ротор должен быть либо перегружен (прошел мимо правильного зубца статора), либо недожат (не сдвинулся достаточно далеко, чтобы выровняться с правильным зубцом статора) более чем на 3,6 °. Почему 3,6°? Что ж, поскольку зубья ротора притягиваются магнитом, правильный зуб должен находиться более чем на полпути между зубьями на статоре для выравнивания (7,2° между зубьями ротора, деленные на 2, дают 3,6°). Таким образом, когда ротор отклоняется от правильного зубца статора более чем на 3,6°, следующий зубец выровняется на его месте, что приведет к пропуску шага. И наоборот, если ротор не сместится более чем на 3,6°, текущий зубец ротора останется на одной линии с зубцом статора, и ротор не будет вращаться, что означает, что вы пропустили шаг.
Двигатель потеряет синхронность или пропустит шаг, если зубья на роторе не совпадают с правильными зубьями на статоре. Что может привести к неправильному расположению зубов? Во-первых, для того, чтобы зуб ротора не выровнялся должным образом, другой зуб должен выровняться там, где он должен быть. Для того чтобы это произошло, ротор должен быть либо перегружен (прошел мимо правильного зубца статора), либо недожат (не сдвинулся достаточно далеко, чтобы выровняться с правильным зубцом статора) более чем на 3,6 °. Почему 3,6°? Что ж, поскольку зубья ротора притягиваются магнитом, правильный зуб должен находиться более чем на полпути между зубьями на статоре для выравнивания (7,2° между зубьями ротора, деленные на 2, дают 3,6°). Таким образом, когда ротор отклоняется от правильного зубца статора более чем на 3,6°, следующий зубец выровняется на его месте, что приведет к пропуску шага. И наоборот, если ротор не сместится более чем на 3,6°, текущий зубец ротора останется на одной линии с зубцом статора, и ротор не будет вращаться, что означает, что вы пропустили шаг.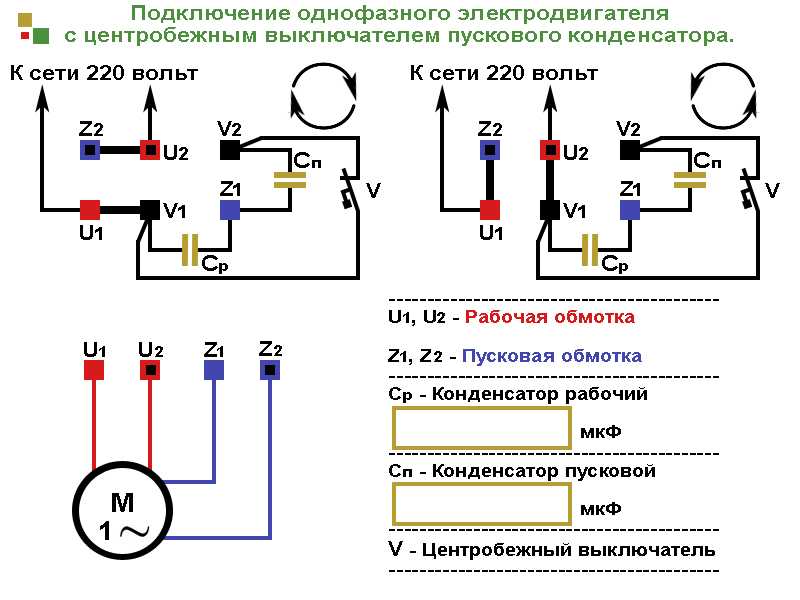
Методы привода
Существует несколько методов привода как для 2-фазных, так и для 5-фазных шаговых двигателей. Вот краткий обзор концепций полношаговых и микрошаговых приводов.
2-фазная система полного шага (1,8°/шаг)
2-фазная система полного шага подает питание как на фазу А, так и на фазу В и переключается между положительным и отрицательным для создания вращения.
5-фазная полноступенчатая система (4-фазное возбуждение Pentagon) (0,72°/шаг)
4-фазная система возбуждения уникальна для 5-фазных двигателей и обеспечивает более стабильную работу.
Микрошаг
Драйверы микрошага делят базовый угол шага двигателя, уменьшая ток в одной фазе и постепенно увеличивая ток в следующей фазе. Это приводит к тому, что двигатель делает меньшие шаги. С микрошаговым драйвером основной шаг двигателя можно разделить на более мелкие шаги в диапазоне от 1/1 до 1/250.
На рисунках справа представлена основная концепция микрошагов.
- Рисунок 1 — Фаза A имеет 100% ток, поэтому ротор выстраивается прямо.
- Рисунок 2 — ток в фазе A уменьшен до 75%, при этом 25% тока теперь приходится на фазу B.
- Рисунок 3 — ток для обеих фаз A и B составляет 50 %, поэтому ротор располагается прямо посередине двух фаз.
- Рисунок 4 — Фаза A теперь на 25%, а фаза B на 75%, поэтому ротор приближается к фазе B.
- Рисунок 5 — фаза A отключена, а фаза B находится на 100 %, поэтому ротор, наконец, выровняется непосредственно с фазой B.
С помощью микрошагового двигателя в этом примере мы разделили базовые 500 шагов на оборот 5-фазного шагового двигателя на 5, увеличив их до 2500 шагов на оборот. Разрешение мотора теперь составляет 0,144°.
Микрошаг не только обеспечивает более высокое разрешение, но и обеспечивает более плавную работу, меньшую вибрацию и меньший шум, чем другие приводы.