Что такое электродвигатель и как он работает. Какие бывают виды электродвигателей. Из каких основных частей состоит электродвигатель. Каковы основные характеристики и параметры электродвигателей. Где применяются электродвигатели в промышленности и быту.
Что такое электродвигатель и его основные компоненты
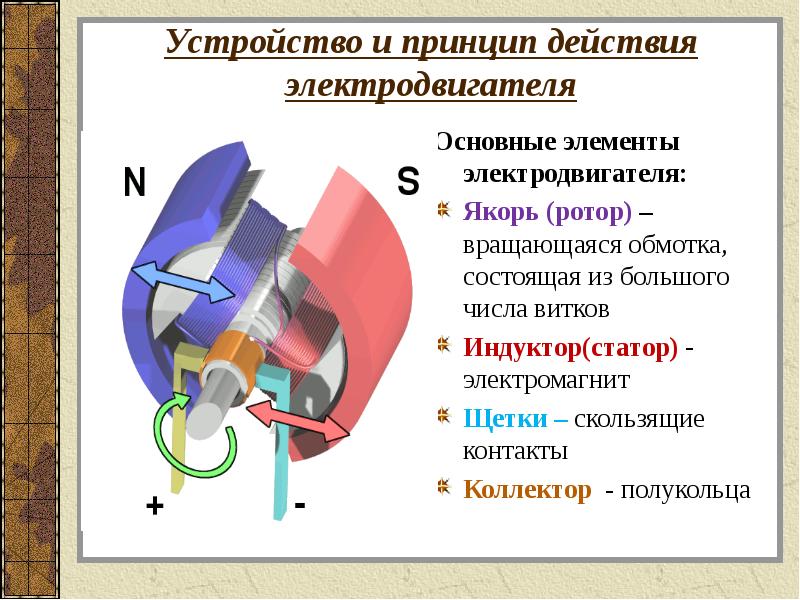
Электродвигатель — это электромеханическое устройство, которое преобразует электрическую энергию в механическую энергию вращения. Основными компонентами любого электродвигателя являются:
- Статор — неподвижная часть двигателя
- Ротор — вращающаяся часть двигателя
- Обмотки — проводники, по которым протекает ток
- Магнитная система — создает магнитное поле
- Подшипники — обеспечивают вращение ротора
- Корпус — защищает внутренние части двигателя
Принцип работы электродвигателя основан на взаимодействии магнитных полей статора и ротора. При подаче электрического тока в обмотки возникает электромагнитное поле, которое приводит ротор во вращение.

Основные типы электродвигателей
По типу питающего тока электродвигатели делятся на два основных вида:
Двигатели постоянного тока
Работают от источника постоянного напряжения. Основные разновидности:
- С последовательным возбуждением
- С параллельным возбуждением
- Со смешанным возбуждением
- С постоянными магнитами
Двигатели переменного тока
Работают от сети переменного тока. Делятся на:
- Асинхронные (наиболее распространены)
- Синхронные
- Коллекторные
Каждый тип имеет свои особенности конструкции и характеристики, определяющие область применения.
Принцип работы электродвигателя постоянного тока
Рассмотрим принцип действия простейшего двигателя постоянного тока:
- При подаче постоянного напряжения на обмотки якоря по ним протекает ток
- Вокруг проводников с током создается магнитное поле
- Это поле взаимодействует с магнитным полем статора (постоянных магнитов или электромагнитов)
- Возникает электромагнитный момент, заставляющий ротор вращаться
- Специальный узел — коллектор с щетками обеспечивает непрерывное вращение
Изменяя величину тока в обмотках, можно регулировать скорость и момент двигателя. Это делает двигатели постоянного тока удобными для применения в приводах с регулируемой скоростью.

Устройство и работа асинхронного двигателя
Асинхронный двигатель — самый распространенный тип электродвигателя. Его основные элементы:
- Статор с трехфазной обмоткой
- Ротор типа «беличья клетка»
- Подшипниковые щиты
- Вентилятор охлаждения
- Клеммная коробка
Принцип работы заключается в следующем:
- Трехфазный ток в обмотках статора создает вращающееся магнитное поле
- Это поле наводит ЭДС в обмотке ротора
- По обмотке ротора протекают индукционные токи
- Взаимодействие токов ротора с полем статора создает вращающий момент
- Ротор начинает вращаться вслед за полем статора, но с небольшим отставанием (скольжением)
Асинхронные двигатели просты, надежны и не требуют сложных систем управления, поэтому широко применяются в промышленности.
Основные характеристики электродвигателей
При выборе электродвигателя учитывают следующие основные параметры:
- Номинальная мощность (кВт)
- Номинальное напряжение (В)
- Номинальный ток (А)
- Частота вращения (об/мин)
- КПД (%)
- Коэффициент мощности
- Пусковой ток
- Пусковой момент
- Перегрузочная способность
Эти характеристики определяют возможности двигателя и позволяют подобрать оптимальный вариант для конкретного применения. Важно также учитывать условия эксплуатации — температуру, влажность, запыленность и др.

Области применения электродвигателей
Электродвигатели находят широчайшее применение во всех отраслях промышленности и в быту:
- Станки и промышленное оборудование
- Насосы, вентиляторы, компрессоры
- Подъемно-транспортные механизмы
- Электротранспорт (электромобили, электропоезда)
- Бытовая техника (пылесосы, стиральные машины и др.)
- Электроинструмент
- Сервоприводы станков с ЧПУ
- Роботы и манипуляторы
Развитие электродвигателей продолжается в направлении повышения КПД, уменьшения массогабаритных показателей, применения новых материалов и технологий производства.
Преимущества и недостатки электродвигателей
Электродвигатели обладают рядом важных достоинств по сравнению с другими типами двигателей:
- Высокий КПД (до 95% и выше)
- Экологичность (отсутствие вредных выбросов)
- Низкий уровень шума и вибраций
- Простота конструкции и обслуживания
- Возможность точного регулирования скорости
- Компактность
- Быстрый пуск и торможение
К недостаткам можно отнести:
- Зависимость от источника электроэнергии
- Сложность использования на автономных объектах
- Чувствительность к перегрузкам
- Необходимость защиты от влаги и пыли
Тем не менее, преимущества электродвигателей обуславливают их широчайшее распространение в современной технике.

Современные тенденции в разработке электродвигателей
Основные направления совершенствования электродвигателей в настоящее время:
- Повышение энергоэффективности
- Применение новых магнитных материалов
- Разработка двигателей с постоянными магнитами
- Создание мотор-редукторов
- Интеграция двигателей с электронными системами управления
- Развитие линейных двигателей
- Миниатюризация для микроэлектромеханических систем
Эти тенденции позволяют создавать все более совершенные электроприводы для различных применений — от бытовой техники до промышленных роботов и электромобилей.
Электродвигатель — описание, классификация, принцип работы
Описание
Электродвигатель — главный элемент электропривода.
Он необходим для работы многих механизмов. С помощью чего это происходит: двигатель преобразовывает электрическую энергию в механическую. Первым эту теорию выдвинул британский физик Майкл Фарадей в своем трактате «О некоторых новых электромагнитных движениях и о теории магнетизма».
Несмотря на то, что все эл. двигатели выполняют одну задачу, у них разные источники питания, следовательно, для каждой области применения нужна определенная модель.
Конструкция
Устройство асинхронного двигателя с короткозамкнутым ротором: 1 – корпус; 2 – сердечник статора; 3 – сердечник ротора; 4 – обмотка ротора «беличья клетка»; 5 – обмотка статора; 6 – вентиляционные лопатки ротора, 7 – подшипниковый щит; 8 – кожух вентилятора; 9 – вентилятор.
Преимущества электродвигателей с короткозамкнутым ротором
Во-первых, у них нет коллектора, что упрощает процесс обслуживания, и требоваться оно будет не так часто.
Во-вторых, подключение сети может идти на прямую. Если дополнительная регулировка оборотов не нужна, то подключение возможно без дополнительных преобразователей. Если трехфазный двигатель требуется подключить в однофазную сеть, то придется подключить фазосдвигающий конденсатор.
Область применения
Электродвигатели используются почти во всех промышленных сферах.
1. В системах отопления, водоснабжения, кондиционирования воздуха, полива, канализации.
2. В системах вентиляции, перекачки и сжижения газа, холодильных установках.
3. Одна из основных сфер — промышленное оборудование. Здесь двигатели применяются в металло-, дерево-, камнеобрабатывающих станках, прокатных станах, в прессах, гильотинах, мельницах, дробилках, текстильном, пищевом и полимерном оборудовании.
4. Еще одна обширная область применения — это специальная техника и транспорт.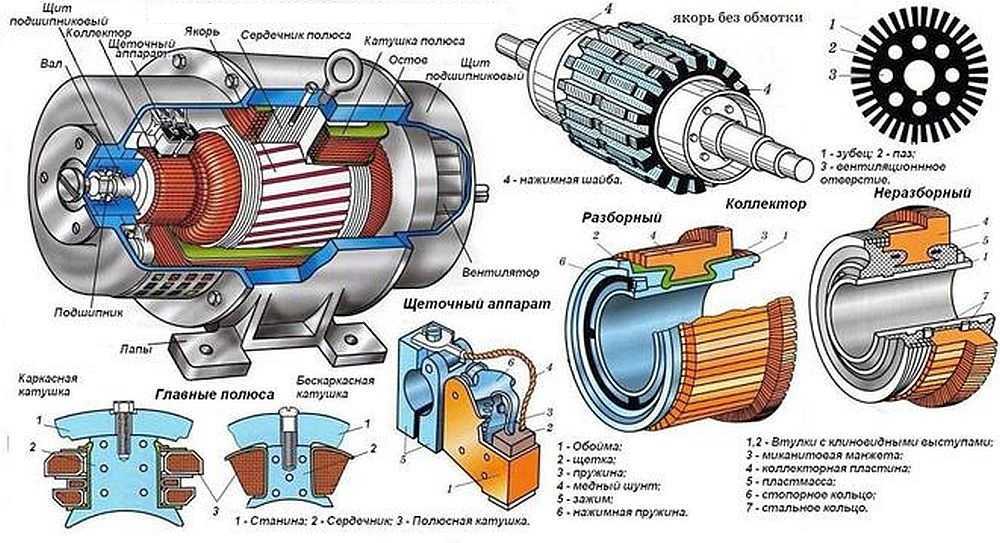
Эл. двигателями оснащаются лифты, эскалаторы, конвейеры, подъемники, лебедки. А также автомобили, поезда, велосипеды, мотоциклы, трамваи, электромобили, автобусы, троллейбусы и т.д. Отдельно можно указать, что в настоящее время, идет активное развитие робототехники, где электрические машины тоже используются.
Виды электродвигателей
1. Коллекторные электродвигатели.
Минимум одна из обмоток должна быть соединена с коллектором.
а) Универсальный эл.
Работает на постоянном и переменном токе. Используется чаще всего в бытовой сфере.
б) Эл. постоянного тока.
В процессе работы электрическая энергия постоянного тока переходит в механическую.
2. Бесколлекторные.
Все приходит в действие за счет электроники. Вместо щеток и коллектора — контроллер и кулер охлаждения системы.
а) Асинхронные.
Название говорит о том, что скорость вращения магнитного поля и ротора различается.
б) Синхронный двигатель переменного тока.
Частота вращения переменного тока совпадает с частотой вращения ротора.
Виды двигателей по назначению
Общепромышленные
Серии: АИР, А, 4А, АМ, 4АМ, 4AMУ, 5А, 5АМ , 5АИ, АД, АДМ.
Крановые
Серии: MTF, МТН, DMTF(H), DMTKF (H), 4MTKM, 4MTH, 4МТМ, MTKF(H).
Электродвигатели со встроенным электромагнитным тормозом
Серии: АИР, 5АИ ЕТ, ЕТ1, ЕD1, ED2.
Взрывозащищенные
Серии: АИМ, АИМЛ, АИМУ, АИМР, ВА, ВАО, 2В, АВ, АВР, 4ВР.
С повышенным скольжением
Серии: АИРС, АС , 5АС , АДМС , 4АС , 4АМС , 5АМС.
По евростандарту
Серии: АИC, AIS , IMM , RA , 6A, W22, W20 , MA, MS.
Импортного производства
АВВ, WEG, SIEMENS, ABLE, LENZE, BONFIGLIOLI, и др.
Принцип работы и устройство электродвигателей?
Под электродвигателем подразумевается электротехнический механизм, который используется для получения механической энергии из электричества. Такое устройство распространено во всех сферах деятельности, включая промышленность и бытовую технику. Назначением техсредства считается приведение в движение присоединенных к нему механизмов. Есть большое количество модификаций электрического двигателя, но все они работают на одних и тех же принципах и имеют обязательный набор узлов.
Такое устройство распространено во всех сферах деятельности, включая промышленность и бытовую технику. Назначением техсредства считается приведение в движение присоединенных к нему механизмов. Есть большое количество модификаций электрического двигателя, но все они работают на одних и тех же принципах и имеют обязательный набор узлов.
Общая информация
Электродвигатели получили широкое распространение из-за нескольких качеств. Среди них:
- универсальность. Механизмы используются в различных сферах;
- простота и надежность;
- большой ресурс.
Используется несколько видов электродвигателей. По типу питания они могут быть постоянного и переменного тока. В первом случае электроэнергию двигатель получает от аккумулятора, батареи или блока. При переменном типе двигателя соединение идет напрямую к электросети.
Принцип работы может быть синхронным и асинхронным. У механизма с синхронизацией есть обмотка на роторе, на которую подается напряжение.
Сам процесс взаимодействия осуществляется на основе влияния магнитного поля на элементы двигателя и приведение их во вращение. При поступлении в электродвигатель энергии внутри возникает электромагнитная индукция, которая в виде силы передается на вращающие сегменты.
Устройство
У электродвигателя есть стандартный набор узлов. Элементы:
- неподвижная часть в виде статора;
- в качестве подвижной части выступает ротор, который и формирует вращательный момент;
- коллектор. Он требуется для 2 функций, включая переключение тока при скользящих контактах, а также показатель роторного угла;
- скользящие контакты представлены в виде щеток, который находятся вне ротора и прижаты к коллектору.
Из электродвигателя формируется механизм электропривода, необходимый для функционирования оборудования.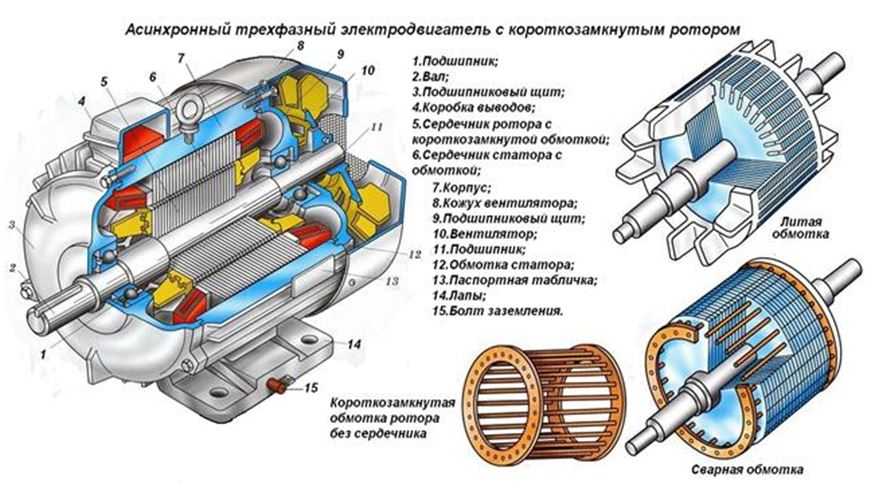
Любой электродвигатель нуждается в двух основных частях, в частности подвижной и неподвижной части. Статорная часть включает в себя корпус, который создается из материалов немагнитного типа, медную обмотку с проволочным сечением квадратного или круглого типа, сердечник, собираемый из пакетов пластин стали электротехнического типа. В качестве немагнитных материалов выступает чугун или алюминиевый сплав.
Роторная часть состоит из сердечника, у которого конструкция формируется из стальных листов с пазовой алюминиевой заливкой, что дает создать набор стержней. Также используются торцевые кольца, необходимые для замыкания конструкции, и электродвигательный вал, запрессовываемый в роторную часть из стали высокой прочности.
Принцип работы
Весь принцип работы основан на электромагнитной индукции, при которой осуществляется взаимодействие двух полей статора с роторными магнитными полями. Это дает привести в движение подвижную часть, что приводит к появлению вращательного момента. Именно с его помощью часть, которая относится к подвижным, приводит к появлению механической энергии, возникающей при вращении.
Именно с его помощью часть, которая относится к подвижным, приводит к появлению механической энергии, возникающей при вращении.
Такой вариант работы одинаков для всех типов электрических двигателей.
Особенности
Электродвигатели при изготовлении получают определенный набор характеристик, который заложен с помощью конструкционных особенностей и использования модификаций.
Основные показатели, определяющие возможности двигателя электрического типа:
- мощность;
- частота вращения в об/м;
- крутящий момент, который также называется вращающим;
- потребление тока;
- КПД в %;
- сетевое напряжение;
- частота сети.
При выборе требуется учитывать не только показатели, но и тип электрического двигателя. Асинхронные и синхронные двигатели используются в разных сферах из-за своих особенностей. Первый тип также отличается тем, что может иметь многофазное функционирование.
На рынке встречается много модификаций, которые значительно отличаются от стандартного простейшего двигателя на электрической основе.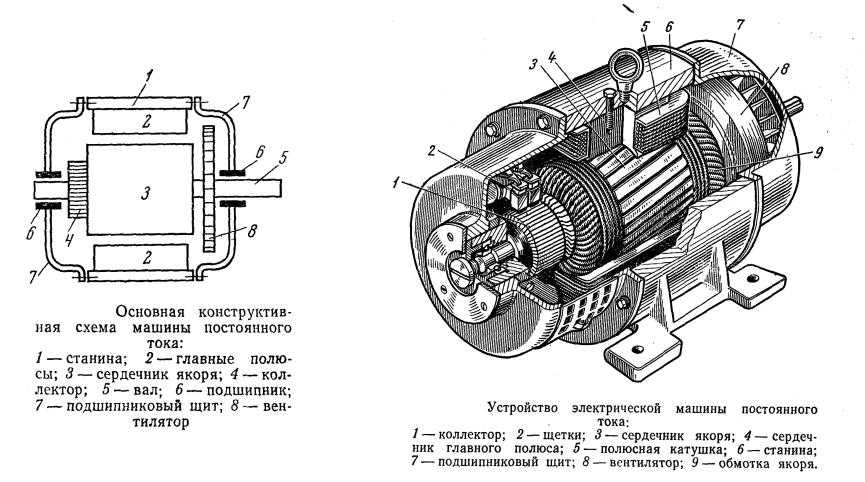 В большинстве ситуаций производители пытаются повысить КПД или устранить основные недостатки механизма. Но принцип работы остается одним для всех моделей.
В большинстве ситуаций производители пытаются повысить КПД или устранить основные недостатки механизма. Но принцип работы остается одним для всех моделей.
Электродвигатель работает на основе электромагнитной индукции, когда подвижная и неподвижная часть устройства контактируют с друг другом электромагнитными полями. Это приводит к тому, что возникает вращательный момент, то есть электрическая энергия превращается в механическую. На рынке представлено много разнообразных моделей электродвигателей, но все они работают на одинаковых принципах и имеют однотипные составные части.
Анализ проектов электродвигателей и генераторов с помощью COMSOL®
В этой записи блога мы рассмотрим 12-слотовую 10-полюсную машину с постоянными магнитами (ПМ), смоделированную в программном обеспечении COMSOL Multiphysics® и модуле AC/DC. Машина в этом примере служит типичным примером вращающегося устройства и имеет внешний диаметр 35 мм и осевую длину 80 мм. С небольшими изменениями входных условий одна и та же модель может стать двигателем или генератором. В следующих сообщениях блога мы подробно расскажем о каждом из аспектов дизайна, обсуждаемых здесь.
В следующих сообщениях блога мы подробно расскажем о каждом из аспектов дизайна, обсуждаемых здесь.
Это первая запись блога из серии, посвященной тому, как получить представление о некоторых аспектах проектирования вращающихся машин, используя возможности моделирования и постобработки программного обеспечения COMSOL Multiphysics®. Часть 2 посвящена расчетным потерям, температуре и эффективности электродвигателей.
Конструкции электродвигателей и генераторов: установка модели
В двигателе с постоянными магнитами магнитные поля от ротора вращаются синхронно с магнитными полями, создаваемыми токами статора. Взаимодействие магнитных полей ротора и статора создает чистый крутящий момент, который позволяет двигателю преобразовывать токи обмоток в механическую энергию. Вследствие синхронного характера возбуждения в двигателе с постоянными магнитами на мгновенный крутящий момент сильно влияет угловое положение ротора, поскольку положение синхронизировано с токами статора. Это отличается от асинхронных машин, где обмотки статора индуцируют магнитные поля ротора в зависимости от отставания по скорости между ротором и статором (отсюда его популярное название, 9).{\circ}/N_p}, где N_p — количество полюсов ротора. В знаменателе указан угловой размах одного полюса ротора.
Это отличается от асинхронных машин, где обмотки статора индуцируют магнитные поля ротора в зависимости от отставания по скорости между ротором и статором (отсюда его популярное название, 9).{\circ}/N_p}, где N_p — количество полюсов ротора. В знаменателе указан угловой размах одного полюса ротора.
Исследование и оптимизация распределения магнитного поля
Распределение магнитного поля является очень важным фактором при проектировании электрических машин. В синхронных вращающихся машинах ключевым параметром для исследования наведенных напряжений является пространственное распределение потока воздушного зазора (потока, которым обмениваются ротор и статор). Фазное напряжение статора будет синусоидальным только в том случае, если радиальный магнитный поток имеет синусоидальное распределение по периферии ротора. Эта пространственная форма волны также называется волной магнитодвижущей силы воздушного зазора (MMF). Если волна МДС несинусоидальна, в индуцированное напряжение вводятся высшие гармоники.
В этой модели для получения волны МДС воздушного зазора мы оцениваем радиальную составляющую плотности магнитного потока вдоль границы сплошности. По мере вращения ротора мы можем наблюдать, как волна МДС эволюционирует во времени. Просто осмотрев, мы можем понять, что индуцированное напряжение не будет идеально синусоидальным. В следующей серии блогов мы объясним, как получить пространственные и временные преобразования Фурье магнитного потока в воздушном зазоре и как связать их со каскадным потоком и гармоническим искажением напряжения.
Слева: изменение плотности магнитного потока при вращении ротора. Справа: развитие волны МДС воздушного зазора при вращении ротора.
Исследование и оптимизация механического крутящего момента
Существует несколько способов возбуждения обмоток статора для конкретной комбинации пазов/полюсов двигателя с постоянными магнитами. Схема, показанная на схеме модели машины с постоянными магнитами (первый рисунок в сообщении блога), является одним из способов привода 12-слотового 10-полюсного двигателя с постоянными магнитами. Возбуждение катушки статора (или начальное положение ротора) необходимо отрегулировать таким образом, чтобы к ротору прикладывался максимальный крутящий момент. Для этого ротору придается начальное угловое смещение. Угол \alpha ротора варьируется в пределах углового диапазона одного магнита ротора и рассчитывается средний крутящий момент. В качестве начального положения ротора выбирается значение начального углового перемещения, соответствующее максимальному среднему крутящему моменту. Таким образом, становится легче визуализировать, какое относительное положение статора и ротора создает максимальный крутящий момент.
Возбуждение катушки статора (или начальное положение ротора) необходимо отрегулировать таким образом, чтобы к ротору прикладывался максимальный крутящий момент. Для этого ротору придается начальное угловое смещение. Угол \alpha ротора варьируется в пределах углового диапазона одного магнита ротора и рассчитывается средний крутящий момент. В качестве начального положения ротора выбирается значение начального углового перемещения, соответствующее максимальному среднему крутящему моменту. Таким образом, становится легче визуализировать, какое относительное положение статора и ротора создает максимальный крутящий момент.
В представленном здесь случае наблюдаются два максимума:
- Положительный максимум, который будет соответствовать вращению в направлении против часовой стрелки — после применения правильной последовательности фаз.
- Отрицательный максимум, который приведет к вращению по часовой стрелке (также здесь, после тонкой настройки последовательности фаз)
Форма волны крутящего момента ротора, представленная в следующем разделе, соответствует положительному максимуму кривой среднего крутящего момента ротора. Мы более подробно рассмотрим проверку крутящего момента и различные методы расчета крутящего момента, такие как 9{\circ}).
Мы более подробно рассмотрим проверку крутящего момента и различные методы расчета крутящего момента, такие как 9{\circ}).
Исследование и оптимизация использования железа и потерь
Используя график плотности магнитного потока, мы можем исследовать распределение плотности потока в железном сердечнике. На некоторых участках геометрии ярмо может образовывать узкое место, что может сместить значение плотности магнитного потока в область насыщения кривой B-H. В других случаях он достаточно широк, чтобы создавать области с низкой напряженностью поля. Когда определенная часть ярма постоянно показывает слабое поле, эта часть недостаточно используется для создания крутящего момента. Когда определенная часть образует постоянное узкое место, эту часть, вероятно, следует расширить. 9{\ circ}, полученное из кривой среднего крутящего момента в предыдущем разделе. Как вы можете видеть из графиков и кривой крутящего момента ниже, использование железа оптимально, когда толщина железа составляет около 2 мм: использование менее 2 мм отрицательно скажется на крутящем моменте, а увеличение добавит ненужного материала. — и поэтому; Вес и стоимость — до мотора.
— и поэтому; Вес и стоимость — до мотора.
Распределение плотности магнитного потока для различных значений толщины железа. Слева: 1 мм. Центр: 2 мм. Справа: 3 мм.
Изменение формы сигнала крутящего момента ротора в зависимости от толщины стали.
Это еще не все: при определении толщины железа учитываются дополнительные факторы, такие как механическая прочность, резистивные и магнитные потери. При исследовании плотности потока и крутящего момента также можно оценить влияние различной толщины стали на потери в стали. Начиная с COMSOL Multiphysics версии 5.6, имеется встроенный модуль расчета потерь 9.0012 позволяет легко оценить потери в меди и в железе с помощью уравнения Steinmetz , формулы Bertotti или определяемой пользователем модели потерь. В следующих сообщениях блога мы подробнее обсудим мультифизические аспекты моделирования вращающихся машин, такие как расчет эффективности, оценка повышения температуры, анализ вибрации и исследование шума.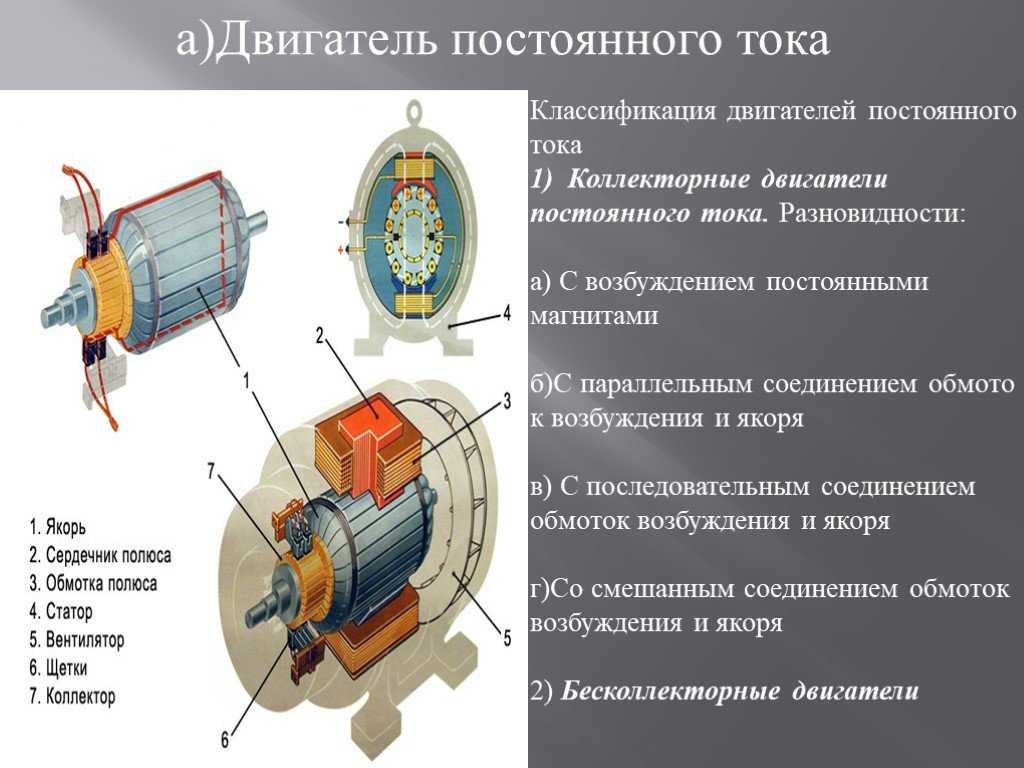
Распределение потерь в железе для различных значений толщины чугуна. Слева: 1 мм. Центр: 2 мм. Справа: 3 мм.
Резюме
Мы обсудили использование некоторых функций COMSOL Multiphysics и модуля AC/DC, чтобы легко получить представление о некоторых аспектах проектирования вращающихся машин. Мы видели, как линейный график плотности радиального магнитного потока в воздушном зазоре показывает нам, будет ли индуцированное напряжение синусоидальным. С помощью COMSOL Multiphysics параметрический анализ можно использовать для определения начального угла ротора, который будет создавать максимальный крутящий момент ротора. Поверхностный график плотности магнитного потока в машине позволяет визуально определить, является ли использование железа оптимальным для эффективного создания крутящего момента. Влияние толщины стали на потери в стали также можно наблюдать с помощью встроенных моделей потерь, предлагаемых COMSOL Multiphysics.
В этом первом сообщении в блоге этой серии показано, как можно использовать мощные возможности COMSOL Multiphysics для моделирования и постобработки для получения ценной информации о конструкции вращающихся машин. В следующих сообщениях блога подробно обсуждаются методы расчета крутящего момента, расчет эффективности, анализ потерь в стали и тепловых характеристик, а также исследование вибрации и шума двигателя. Следите за обновлениями!
В следующих сообщениях блога подробно обсуждаются методы расчета крутящего момента, расчет эффективности, анализ потерь в стали и тепловых характеристик, а также исследование вибрации и шума двигателя. Следите за обновлениями!
Попробуйте сами
Попробуйте смоделировать обсуждаемый здесь электродвигатель, нажав кнопку ниже:
Получить файл MPH
Электродвигатель
Что такое электродвигатель?
Электродвигатель представляет собой машину в зависимости от конструкции двигателя: сердечник с намотанным кабелем, без намотанного кабеля, однофазный, трехфазный, с постоянными магнитами или без них; мощность зависит от сечения провода, витков провода и приложенного электрического напряжения.
Orion Italia имеет сотни тысяч релейных блоков защиты, установленных по всему миру. Нажмите на ссылку ниже, чтобы узнать больше о нашем цифровом устройстве для защита двигателя:
- Реле защиты двигателя MPR100
Общие характеристики
Производительность: отношение полезной мощности, генерируемой ими, к потребляемой мощности. Обычно обозначается греческой буквой η.
Обычно обозначается греческой буквой η.
Низкая скорость или номинальная скорость: это угловая скорость коленчатого вала, то есть число оборотов в минуту (об/мин или RPM), с которым он вращается. Обозначается буквой н.
Мощность: это работа, которую двигатель способен выполнять в единицу времени при данной скорости вращения. Обычно она измеряется в лошадиных силах (л.с.), при этом 1 л.с. равна 736 Вт.
Момент двигателя: момент вращения, который действует на вал двигателя и определяет его вращение. Измеряется в кг*м (килограммы на метр) или что такое же ньютон-метр (Нм), при этом 1 кгм равен 9,81 Нм (9,81 кг*ф*м). Существует несколько типов крутящих моментов, см., например, пусковой крутящий момент, ускоряющий крутящий момент и номинальный крутящий момент.
Разработка электродвигателей
Электродвигатели представляют собой вращающиеся электрические машины, преобразующие электрическую энергию в механическую. Благодаря своим многочисленным преимуществам, в том числе экономичности, чистоте, комфорту и безопасности эксплуатации, электродвигатель в значительной степени вытеснил другие источники энергии, как в промышленности, так и на транспорте, в шахтах, торговле или быту.
Электродвигатели удовлетворяют широкий спектр потребностей в обслуживании, от запуска, ускорения, движения или торможения до удержания и остановки нагрузки. Эти двигатели производятся с мощностью от долей лошадиных сил до нескольких тысяч и с широким диапазоном скоростей, которые могут быть фиксированными, регулируемыми или переменными.
Электродвигатель содержит гораздо меньше механических частей, чем двигатель внутреннего сгорания или паровой двигатель, что делает его менее подверженным отказам. Электродвигатели являются наиболее гибкими из всех, когда речь идет об изменении мощности, и могут мгновенно переходить из холостого хода в полное рабочее положение. Они меньше по размеру, и могут быть разработаны системы для привода колес от одного двигателя, например, в автомобилях.
Недостатком является то, что аккумуляторы являются единственными системами хранения электроэнергии, и они занимают много места. Кроме того, когда они израсходованы, им требуется несколько часов для перезарядки, прежде чем они снова смогут функционировать, тогда как в случае с двигателем внутреннего сгорания достаточно просто заполнить топливный бак. На железной дороге эта проблема решается путем прокладки кабеля над путями, который подключается к электростанциям. Локомотив получает ток от кабеля с помощью металлической детали, называемой салазками. Таким образом, системы хранения электроэнергии не нужны.
На железной дороге эта проблема решается путем прокладки кабеля над путями, который подключается к электростанциям. Локомотив получает ток от кабеля с помощью металлической детали, называемой салазками. Таким образом, системы хранения электроэнергии не нужны.
По характеру преобразуемого электрического тока электродвигатели классифицируют на двигатели постоянного тока, называемые также двигателями постоянного, переменного тока, которые, в свою очередь, группируются по системе их работы на асинхронные двигатели, двигатели синхронные и коллекторные двигатели. Оба имеют все элементы, общие для электромагнитных вращающихся машин
Электродвигатели постоянного тока
Преобразование энергии в электродвигателе происходит благодаря взаимодействию между электрическим током и магнитным полем. Магнитное поле, которое образуется между двумя противоположными полюсами магнита, представляет собой область, в которой сила действует на определенные металлы или на другие магнитные поля. Электродвигатель использует силу этого типа для вращения вала, тем самым преобразуя электрическую энергию в механическое движение.
Электродвигатель использует силу этого типа для вращения вала, тем самым преобразуя электрическую энергию в механическое движение.
Два основных компонента каждого электродвигателя — это ротор и статор. Ротор представляет собой вращающуюся часть, подвижный электромагнит, с несколькими боковыми выступами, каждый из которых несет обмотку, по которой проходит электрический ток. Статор, расположенный вокруг ротора, представляет собой неподвижный электромагнит, покрытый изолятором. Как и ротор, он имеет ряд выступов с электрическими обмотками, по которым циркулирует ток.
При прохождении электрического тока по цепи якорь начинает вращаться, и вращение продолжается до тех пор, пока петля не достигнет вертикального положения. Поскольку полоски коллектора вращаются вместе с петлей, каждая половина оборота меняет направление электрического тока на противоположное. Это означает, что та часть петли, которая до сих пор принимала силу вверх, теперь принимает ее вниз, а другая часть — наоборот.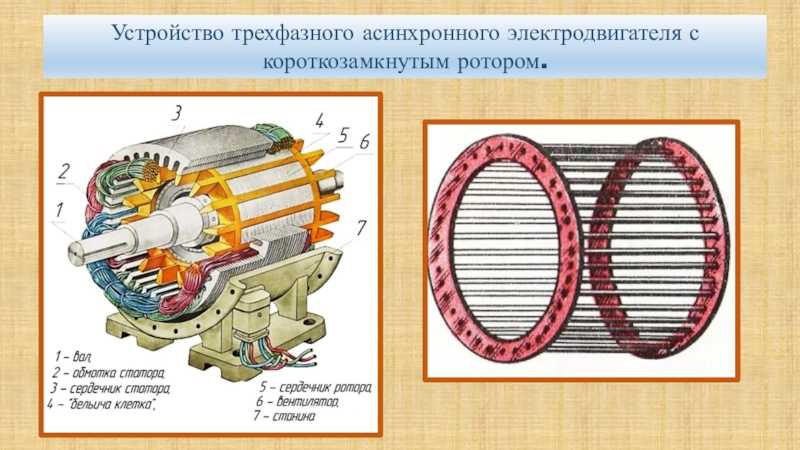 Таким образом, петля делает еще пол-оборота, и процесс повторяется при вращении якоря. Описанная схема соответствует двигателю постоянного тока, самому простому среди электродвигателей, но объединяющему основные принципы этого типа двигателя.
Таким образом, петля делает еще пол-оборота, и процесс повторяется при вращении якоря. Описанная схема соответствует двигателю постоянного тока, самому простому среди электродвигателей, но объединяющему основные принципы этого типа двигателя.
Электродвигатели переменного тока
Электродвигатели переменного тока имеют аналогичную конструкцию с небольшими отличиями в конструкции обмоток и коллектора ротора. В зависимости от операционной системы они подразделяются на асинхронные, синхронные и коллекторные двигатели.
Асинхронные двигатели
Для асинхронного двигателя не требуются щетки или коллектор. Его броня сделана из намагничивающихся металлических пластин. Переменное направление циркуляции тока в витках статора создает вращающееся магнитное поле, увлекающее за собой намагничиваемые металлические пластины и заставляющее их вращаться. Асинхронный двигатель является наиболее широко используемым двигателем переменного тока благодаря своей прочности и простоте конструкции, хорошей производительности и низкой стоимости, а также отсутствию коллектора и тому факту, что его рабочие характеристики хорошо адаптированы к постоянной скорости.