Что представляет собой двигатель постоянного тока с параллельным возбуждением. Как устроен и работает такой электродвигатель. Какими характеристиками и преимуществами обладает. Где применяется двигатель с параллельным возбуждением.
Устройство двигателя постоянного тока с параллельным возбуждением
Двигатель постоянного тока с параллельным возбуждением имеет следующую конструкцию:
- Статор с главными полюсами, на которых расположена обмотка возбуждения
- Якорь с обмоткой и коллектором
- Щеточно-коллекторный узел
- Вал двигателя
Главной особенностью является то, что обмотка возбуждения подключена параллельно обмотке якоря. Это определяет название и характеристики двигателя.
Принцип работы двигателя с параллельным возбуждением
Принцип работы двигателя постоянного тока с параллельным возбуждением основан на взаимодействии магнитных полей статора и ротора:
- При подаче напряжения ток протекает по обмотке возбуждения и создает магнитное поле статора
- Одновременно ток протекает по обмотке якоря через щетки и коллектор
- Взаимодействие магнитных полей статора и якоря создает вращающий момент
- Якорь начинает вращаться и приводит в движение вал двигателя
Благодаря параллельному подключению обмоток, ток возбуждения не зависит от тока якоря. Это обеспечивает стабильную частоту вращения двигателя.

Характеристики двигателя постоянного тока с параллельным возбуждением
Основные характеристики двигателя с параллельным возбуждением:
- Жесткая механическая характеристика — частота вращения мало зависит от нагрузки
- Высокая перегрузочная способность
- Широкий диапазон регулирования скорости
- Плавный пуск и торможение
- Высокий КПД (до 90-95%)
- Простота управления
Преимущества двигателя с параллельным возбуждением
Двигатели постоянного тока с параллельным возбуждением обладают рядом достоинств:
- Стабильная частота вращения при изменении нагрузки
- Плавное и глубокое регулирование скорости
- Высокий пусковой момент
- Возможность реверса
- Хорошие динамические свойства
- Простота конструкции и обслуживания
Эти преимущества обусловлены особенностями параллельного включения обмоток возбуждения и якоря.
Области применения двигателей с параллельным возбуждением
Двигатели постоянного тока с параллельным возбуждением широко применяются в различных отраслях:
- Металлообрабатывающие станки
- Подъемно-транспортные механизмы
- Прокатные станы
- Бумагоделательные машины
- Экструдеры
- Насосы и компрессоры
- Вентиляторы
- Тяговый электропривод
Они используются там, где требуется стабильная скорость вращения и плавное регулирование в широком диапазоне.
Регулирование скорости двигателя с параллельным возбуждением
Существует несколько способов регулирования частоты вращения двигателя с параллельным возбуждением:
- Изменение напряжения на якоре
- Введение добавочного сопротивления в цепь якоря
- Изменение магнитного потока путем регулирования тока возбуждения
- Импульсное регулирование напряжения
Наиболее эффективным является регулирование напряжения на якоре с помощью управляемых выпрямителей или широтно-импульсных преобразователей.
Торможение двигателя постоянного тока с параллельным возбуждением
Для торможения двигателей с параллельным возбуждением применяются следующие способы:
- Динамическое торможение
- Рекуперативное торможение
- Противовключение
- Торможение самовозбуждением
Выбор способа торможения зависит от требований к динамике привода и возможности рекуперации энергии в сеть.
Характерные неисправности двигателей с параллельным возбуждением
Основные неисправности, возникающие при эксплуатации двигателей постоянного тока с параллельным возбуждением:

- Износ щеток и коллектора
- Межвитковые замыкания в обмотках
- Пробой изоляции обмоток
- Разрыв цепи возбуждения
- Ослабление крепления полюсов
- Износ подшипников
Своевременное обслуживание и диагностика позволяют предотвратить серьезные поломки двигателя.
Преимущества и недостатки по сравнению с другими типами двигателей
Двигатели постоянного тока с параллельным возбуждением имеют следующие преимущества по сравнению с другими типами электродвигателей:
- Более стабильная частота вращения, чем у двигателей последовательного возбуждения
- Лучшие регулировочные свойства, чем у асинхронных двигателей
- Выше КПД, чем у универсальных коллекторных двигателей
- Проще в управлении, чем вентильные двигатели
К недостаткам можно отнести наличие щеточно-коллекторного узла, требующего обслуживания, и более высокую стоимость по сравнению с асинхронными двигателями.
Перспективы применения двигателей с параллельным возбуждением
Несмотря на развитие бесколлекторных двигателей, двигатели постоянного тока с параллельным возбуждением сохраняют свои позиции в ряде областей:
- Тяговый электропривод электромобилей
- Прецизионные станки с ЧПУ
- Роботизированные комплексы
- Специальные приводы с высокими требованиями к динамике
Их применение обусловлено простотой управления, высоким КПД и хорошими динамическими характеристиками.
Двигатель постоянного тока с параллельным возбуждением
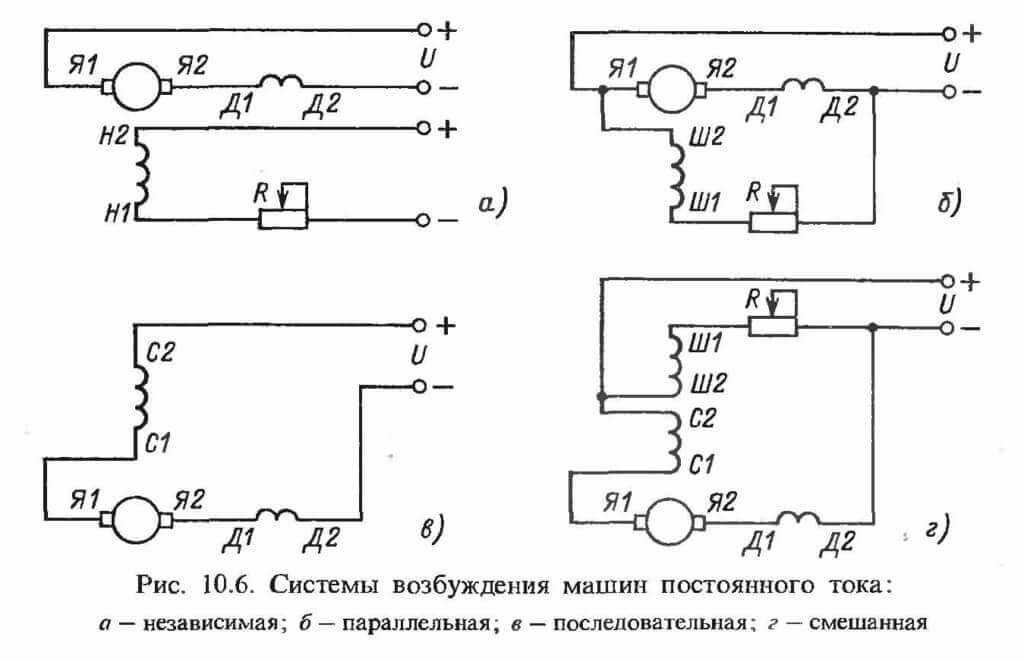
Существует несколько возможных разновидностей построения эл моторов, работающих от источника постоянного напряжения. Принцип их действия одинаков, а отличия заключаются в особенностях подключения обмотки возбуждения (ОВ) и якоря (Я).
Свое название эл двигатель постоянного тока с параллельным возбуждением получил потому, что его обмотка Я и ОВ соединяются друг с другом именно таким образом. Электродвигатель такой разновидности обеспечивает нужные режимы, превосходя изделия последовательного и смешанного типов тогда, когда требуется практически постоянная скорость его функционирования.
Построение двигателя и область его применения
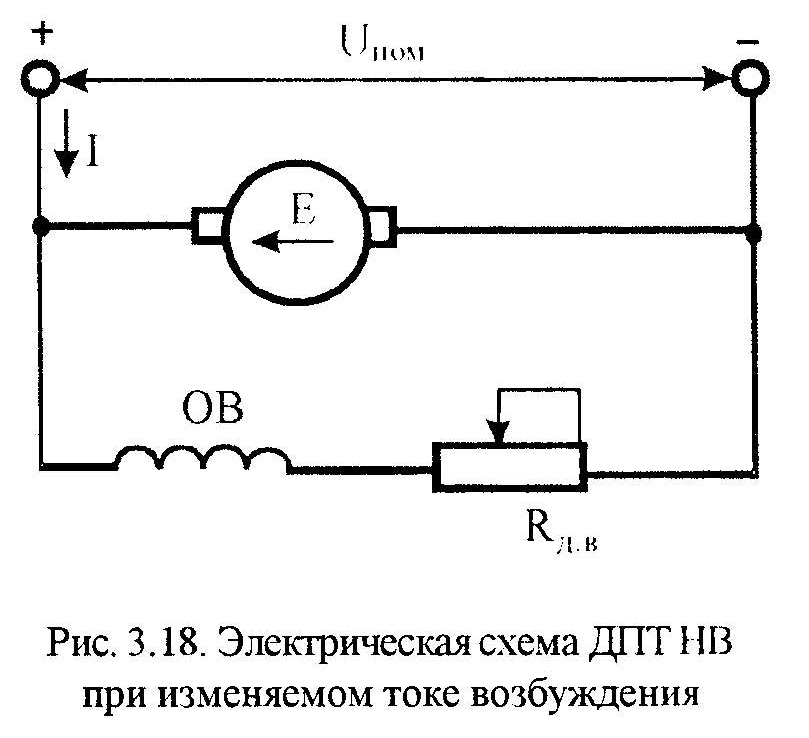
Схема электродвигателя рассматриваемого типа изображена ниже.
- общий ток, потребляемый эл мотором от источника, составляет I = IЯ + IВ, где IЯ, IВ – токи через якорь, обмотку возбуждения, соответственно,
- одновременно IВ не зависит от IЯ, то есть не зависит от нагрузки.


Устройство применяется тогда, когда пуск не требует обеспечения высокого момента, то есть когда режимы эксплуатации приводных механизмов не предполагают создание больших стартовых нагрузок. Это типично для станков и вентиляторов.
Для практики ценны такие полезные тяговые параметры подобных эл механизмов как
- устойчивость работы при колебаниях нагрузки,
- высокая экономичность из-за того, что IЯ не протекает через ОВ.
Пуск при недостаточном моменте обеспечивается переходом на схему смешанного типа.
Поведение электромотора при изменении нагрузок
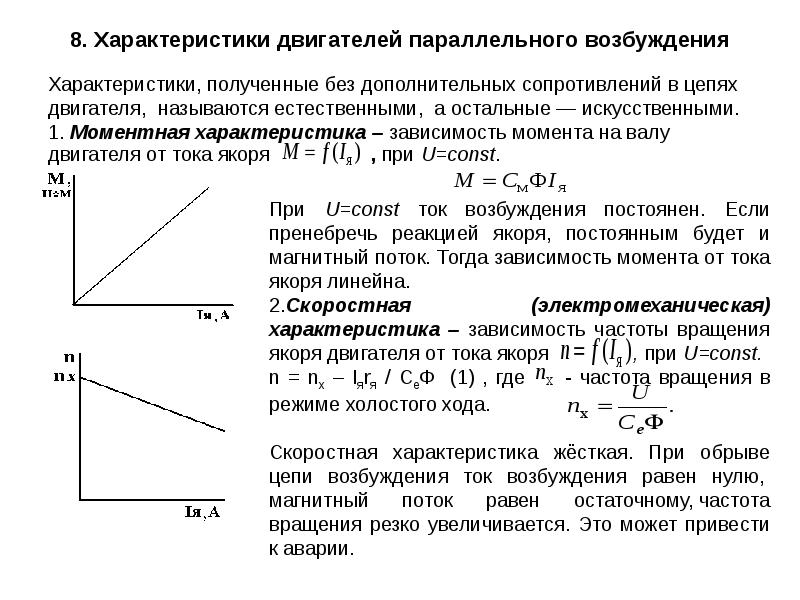
Механическая характеристика показывает устойчивость работы электромотора в широком диапазоне изменения нагрузок, описывая зависимость момента, создаваемого эл двигателем, от скорости функционирования вала.
Тяговые характеристики механизма рассматриваемого типа позволяют сохранить величину момента при значительных изменения количества оборотов. Обычно тяговые параметры агрегата должен обеспечивать уменьшение этого параметра не более чем на 5 %. Несложное исследование демонстрирует: тормозные параметры из-за обратимости процессов оказываются аналогичными. Эти положения распространяются также на случай применения смешанного возбуждения.
Обычно тяговые параметры агрегата должен обеспечивать уменьшение этого параметра не более чем на 5 %. Несложное исследование демонстрирует: тормозные параметры из-за обратимости процессов оказываются аналогичными. Эти положения распространяются также на случай применения смешанного возбуждения.
Говоря иными словами, для такого эл мотора характерна жесткая характеристика. Такой характер работы считается важным преимуществом агрегата рассматриваемого типа.
Разновидности подходов к регулированию частоты вращения
Принцип действия параллельного включения обмоток обеспечивает плавный пуск в сочетании с большим диапазоном изменения оборотов в процессе работы с помощью реостатов. Они же обеспечивают нормальный пуск двигателя ограничением тока.
Для агрегатов параллельного типа используются способы управления скоростью функционирования изменением:
- магнитного потока главных полюсов,
- сопротивления цепи якоря,
- подаваемого на него напряжения.
Объектом воздействия являются обмотка возбуждения, обмотка якоря, его рабочее напряжение.
Изменение магнитного потока осуществляется с помощью последовательного реостата RР. При увеличении его сопротивления ОВ пропускает меньший ток, что сопровождается уменьшением магнитного потока. Внешним проявлением такого действия становится наращивание оборотов Я на холостом ходу. Исследование показывает, что происходит увеличение угла наклона характеристики.
Второй принцип основан на включении в цепь питания якоря дополнительного последовательного регулировочного реостата. При увеличении его сопротивления скорость вращения Я уменьшается, тогда как его естественная механическая характеристика приобретает больший наклон. Из-за последовательного включения с основной обмоткой реостата дополнительного сопротивления, на котором рассеивается значительная мощность, происходит заметное падение экономичности.
Третий принцип сопровождается определенным усложнением схемных решений и требует применения отдельного регулируемого источника питания с сохранением возможности раздельного регулирования. В случае его применения в реальных условиях возможно только уменьшение частоты вращения вала.
В случае его применения в реальных условиях возможно только уменьшение частоты вращения вала.
Двигатель с независимым возбуждением
Двигатель постоянного тока независимого возбуждения реализует третий подход к регулированию и интересен тем, что ОВ и М питаются от разных источников, схема его представлена ниже.
Обмотки простейшего электромотора параллельного независимого возбуждения
Для моторов в данном конструктивном исполнении Iв устанавливается неизменным, а меняется только напряжение, приложенное к М. Это сопровождается изменением числа оборотов на холостом ходу, но жесткость характеристики изменений не претерпевает.
Принцип работы такого агрегата за счет независимого функционирования двух источников оказывается более сложным. Однако, его применение дает такие важные для практики преимущества как
- плавное экономичное управление скоростью функционирования с большой глубиной,
- пуск мотора при пониженном напряжении без реостата.
В случае, если пуск происходит на нормальном напряжении, реостат ограничивает величину Iв.
Исследование показывает, что максимальное количество оборотов ограничено только сопротивлением М, а минимальное условиями отвода выделяемого тепла в процессе работы.
Характеристики в части энергопотребления и скорости срабатывания управляющей системы улучшаются в случае последовательного включения с М различных тиристорных регуляторов. Для установки числа оборотов вала и их стабилизации в процессе приведения в движение различных механизмов находят применение различные способы. Их общим характерным признаком является включение тиристорного регулятора в цепь частотной отрицательной обратной связи. Пуск такого агрегата требует реализации специальных процедур.
Заключение
Двигатель с параллельным возбуждением является очень гибким приводным механизмом и может использоваться в очень большом количестве областей там, где не требуются большие моменты при старте. Имеет несложные и надежные цепи регулирования скорости вращения, отличается простотой запуска.
Почему регулировочная характеристика двигателя параллельного возбуждения криволинейна?
Электрическая техника плотно вошла в нашу жизнь. Благодаря приводам движутся легче не только механизмы, но и рабочие дела. Трудовой процесс идет проворнее, а отдых становится комфортней. Широкое применение во всех сферах деятельности заняли двигатели постоянного тока с параллельным возбуждением.
Содержание:
1. Значение и преимущества электродвигателей постоянного тока с параллельным возбуждением.
2. Устройство и принцип работы.
3. Регулировка скорости.
4. График регулировочной характеристики.
5. Торможение двигателя.
6. Техпаспорт.
ЗНАЧЕНИЕ И ПРЕИМУЩЕСТВА ДПТ ПАРАЛЛЕЛЬНОГО ВОЗБУЖДЕНИЯ
Когда работа механизма требует стабильную скорость вращения и достаточно широкий диапазон ее регулировки, на помощь приходят именно двигатели с параллельным возбуждением. Таким запросам двигатели последовательного и смешанного возбуждения не соответствуют.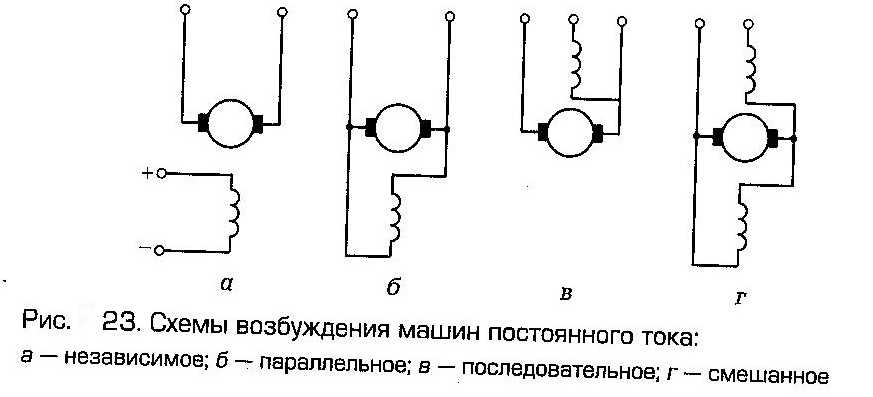 Первые имеют обратную зависимость частоты вращения от нагрузки, а вторые сопровождаются большим пусковым моментом и быстрым ускорением на запуске.
Первые имеют обратную зависимость частоты вращения от нагрузки, а вторые сопровождаются большим пусковым моментом и быстрым ускорением на запуске.
Двигатель с параллельной схемой возбуждения считается лучшим выбором для эксплуатации с подобными запросами. Высокие тяговые показатели, плавная скорость перемещения и постоянство оборотов — неоспоримые достоинства, которые выделяют этот вид привода. Двигатели с параллельным возбуждением ставятся на различные производственные станки, насосы, вентиляторы, шахтные подъемные установки, фуникулеры, лифты, прочее.
УСТРОЙСТВО И ПРИНЦИП РАБОТЫ
Рассмотрим как устроен электродвигатель постоянного тока с обмоточным параллельным подключением. Тот же самый коллекторный электродвигатель постоянного тока, но со своими особенностями. Принцип работы электромашин постоянного тока состоит в преобразовании электрической энергии в механическую. ЭДС возникает за счет вращения якоря в магнитном поле индуктора, и равна сумме всех движущих сил витков роторной катушки. После пуска привод разгоняется, появляется противо-ЭДС.
После пуска привод разгоняется, появляется противо-ЭДС.
Схема включения обуславливает название самого механизма: обмотки якоря и возбуждения присоединяются между собой параллельно. Постоянство тока отвечает за неизменность магнитного потока. Подобная обособленность представляет собой главные свойства ДПТ параллельного возбуждения: момент прямо пропорционален силе тока, количество оборотов двигателя снижается мало. Следовательно, скорость вращения его ротора оказывается постоянной даже при изменении диапазона нагрузки. Это явление получило название жесткой характеристики.
РЕГУЛИРОВКА СКОРОСТИ
Для слаженного действия аппаратуры в цепи включают добавочные реостаты. На роторе ставят пусковой резистор, а на индуктор — регулировочный. В работе чаще применяется только один из них — реостат мотка возбуждения. Он контролирует скорость вращения за счет изменения тока в обмотке. Способы регулирования скорости электродвигателя бывают другими. Поправка происходит за счет изменения сопротивления якорной цепи, или подсоединения источника питания с собственным регулятором.
Перед тем как рассматривать регулирование частоты вращения двигателя, введем понятия «естественная» и «искусственная» характеристики. Они объединены в одну группу механических параметров. Их описание даст обоснование почему, собственно, регулировка скорости, выраженная на плоскости в системе координат, есть криволинейна.
Зависимость оборотной скорости привода оттока якоря, показатели которого сняты при номинальном напряжении, и отсутствием дополнительных сопротивлений в роторной цепи называется естественной характеристикой. При условии изменения хотя бы единственного параметра, который отличается от номинального, или в якорной цепи присутствует дополнительное внешнее сопротивление, характеристику называют искусственной. Рабочие параметры скорости вращения определяются показателями силы тока, напряжения и магнитного потока. На их основе осуществляется расчет. Опираясь на полученные показатели, возможно построить график зависимости.
ГРАФИК РЕГУЛИРОВОЧНОЙ ХАРАКТЕРИСТИКИ
Полученная кривая регулировочной характеристики показывает, что изменение значений тока в обмотке возбуждения дает плавное установление скорости оборотов в больших функциональных пределах. К сожалению, создавать очень низкие возбуждающие токи нельзя. Это действие может вызвать чрезмерное ускорение устройства. Запрещено, также размыкать цепь возбуждения при работе электродвигателя. в этом случае увеличение скорости не знает границ. Остановить ее вручную невозможно. В результате чего двигатель с параллельным возбуждением идет вразнос. Такое явление — самая серьезная поломка электродвигателя постоянного тока. В основном, зависящая от человеческого контроля неисправность располагается в щеточно-коллекторном контакте.
К сожалению, создавать очень низкие возбуждающие токи нельзя. Это действие может вызвать чрезмерное ускорение устройства. Запрещено, также размыкать цепь возбуждения при работе электродвигателя. в этом случае увеличение скорости не знает границ. Остановить ее вручную невозможно. В результате чего двигатель с параллельным возбуждением идет вразнос. Такое явление — самая серьезная поломка электродвигателя постоянного тока. В основном, зависящая от человеческого контроля неисправность располагается в щеточно-коллекторном контакте.
При отсутствии профилактического осмотра в этих местах скапливается пыль, грязь, нагар, накопление которых провоцирует перебои в работе. Нельзя пренебрегать своевременной очисткой. Прикладывая незначительные усилия, можно избежать серьезных повреждений и опасных ситуаций. Двигатель не взрывается, но травмироваться вполне реально. При выходе мотора из контрольного управления следует отойти на безопасное расстояние. Вследствие появления разноса по причине загрязнения узла были придуманы бесщеточные двигатели.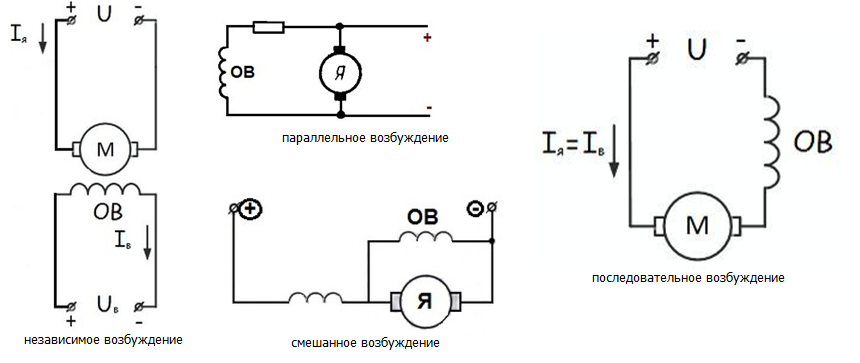
ТОРМОЖЕНИЕ ДВИГАТЕЛЯ
Для торможения машин серии ДПТ параллельного соединения используются реостаты, метод возврата электроэнергии в сеть и торможения обратным током. Основой реостатного торможения является то, что при отключении от сети двигатель, вращаясь по инерции, переходит в генераторный режим. Если замкнуть обмотку на любое сопротивление, накопленная энергия при нагрузке очень быстро расходуется, как результат — движение машины остановится.
Электроэнергия при торможении с рекуперацией возвращается обратно источнику питания и может быть использована повторно. На этом основании данный способ именуют полезное торможение.
Принцип напряжения противотоком состоит в том, что агрегат от сети не отключается, а только изменяется направление напряжения, которое следует приложить. Включается положение генератора, запас механической энергии переходит в тепловой. Чтобы уменьшить значение тока при остановке, в якорную цепь подается дополнительное сопротивление.
ТЕХПАСПОРТ
Не одно опытное исследование работы электродвигателей постоянного тока доказало значительные выгоды применения в ходе эксплуатации. Рабочие нагрузки в сверхусловиях высветлили недостатки. Параметры сохраняются лишь при соблюдении правил. Нарушении надлежащих условий использования, режима работы обусловливают серьезные поломки, требующие капитального ремонта Все действия должны проводиться согласно данных техпаспорта.
В инструкции четко указаны размеры двигателя, комплектующие детали, материалы исполнения, данные механической характеристики (номинальные и рабочие показатели системы), правила использования в условиях окружающей среды, способы применения. Эксплуатация устройств согласно технической паспортной документации — залог бесперебойной, надежной и долгосрочной работы. Регламент составляется отдельно под каждый вид мотора, будь он возбуждения последовательного, параллельного, постоянного или независимого. Значение имеет только добросовестное применение инструкции.
Необходимо вовремя проводить плановые осмотры, ремонты, испытания на износ, особенно для предотвращения разноса. Важно помнить: безопасность труда превыше всего.
Методы управления скоростью двигателя постоянного тока
Скорость двигателя постоянного тока
Обратная ЭДС E b двигателя постоянного тока представляет собой не что иное, как ЭДС индукции в проводниках якоря из-за вращения якоря в магнитном поле. Таким образом, величина E b может быть задана уравнением ЭДС генератора постоянного тока.
E b = PØNZ / 60A
(где P = количество полюсов, Ø = поток/полюс, N = скорость в об/мин, Z = количество проводников якоря, A = параллельные пути)
E B также можно определить,
Таким образом, из вышеуказанных уравнений
n = E B 60A / P . ØZ
ØZ
, но для двигателя постоянного тока A, P и Z являются постоянными
Следовательно, N ∝ K E b / Ø (где K=постоянная 90 017)
двигатель постоянного тока прямо пропорционален противо-ЭДС и обратно пропорционален потоку на полюс.Регулятор скорости шунтового двигателя
1. Метод контроля потока
Выше уже объяснялось, что скорость двигателя постоянного тока обратно пропорциональна потоку на полюс. Таким образом, уменьшая поток, можно увеличить скорость и наоборот.
Для управления потоком последовательно с обмоткой возбуждения добавляется реостат, как показано на принципиальной схеме. Добавление большего сопротивления последовательно с обмоткой возбуждения увеличит скорость, так как уменьшит магнитный поток. В параллельных двигателях, поскольку ток возбуждения относительно очень мал, I ш 2 Р потеря небольшая. Поэтому этот метод достаточно эффективен. Хотя скорость может быть увеличена выше номинального значения за счет уменьшения потока с помощью этого метода, он накладывает ограничение на максимальную скорость, поскольку ослабление потока поля сверх установленного предела отрицательно повлияет на коммутацию.
Поэтому этот метод достаточно эффективен. Хотя скорость может быть увеличена выше номинального значения за счет уменьшения потока с помощью этого метода, он накладывает ограничение на максимальную скорость, поскольку ослабление потока поля сверх установленного предела отрицательно повлияет на коммутацию.
2. Метод управления якорем
Скорость двигателя постоянного тока прямо пропорциональна противо-ЭДС E b и E b = V — I a R a . Это означает, что при напряжении питания V и сопротивлении якоря R и поддерживаются постоянными, тогда скорость прямо пропорциональна току якоря I и . Таким образом, если последовательно с якорем добавить сопротивление, I a уменьшится, а значит, уменьшится и скорость. Чем больше сопротивление последовательно с якорем, тем больше падение скорости.
3. Метод контроля напряжения
a) Управление несколькими напряжениями :
В этом методе шунтирующее поле подключается к фиксированному возбуждающему напряжению, а на якорь подается разное напряжение. Напряжение на якоре изменяется с помощью подходящего распределительного устройства. Скорость приблизительно пропорциональна напряжению на якоре.
Напряжение на якоре изменяется с помощью подходящего распределительного устройства. Скорость приблизительно пропорциональна напряжению на якоре.
b) Система Ward-Leonard :
Эта система используется там, где требуется очень чувствительное управление скоростью двигателя (например, электрические экскаваторы, лифты и т. д.). Устройство этой системы показано на рисунке справа.
M 2 — двигатель, для которого требуется регулирование скорости.
M 1 может быть любым двигателем переменного или постоянного тока с постоянной скоростью.
G представляет собой генератор, напрямую соединенный с M 1 .
В этом методе выходной сигнал генератора G подается на якорь двигателя M 2 чья скорость должна контролироваться. Выходное напряжение генератора G может изменяться от нуля до максимального значения с помощью его регулятора поля и, следовательно, напряжение якоря двигателя M 2 изменяется очень плавно. Следовательно, этим способом может быть получено очень плавное управление скоростью двигателя постоянного тока .
Следовательно, этим способом может быть получено очень плавное управление скоростью двигателя постоянного тока .
Регулятор скорости серийного двигателя
1. Метод управления потоком
- Полевой отвод : Переменное сопротивление подключается параллельно последовательному полю, как показано на рис. (а). Этот переменный резистор называется отклоняющим, так как через этот резистор можно отвести желаемую величину тока и, следовательно, ток через катушку возбуждения можно уменьшить. Таким образом, поток можно уменьшить до желаемой величины и увеличить скорость.
- Переключатель якоря : Переключатель подсоединяется к якорю, как показано на рис. (b).
При заданном постоянном крутящем моменте нагрузки, если ток якоря уменьшается, тогда поток должен увеличиться, как Ta ∝ ØIa
Это приведет к увеличению тока, потребляемого от источника питания, и, следовательно, увеличится поток Ø и, следовательно, скорость двигателя уменьшится.
- Управление полем с ответвлениями : Как показано на рис. (c), катушка возбуждения имеет отводы, разделяя количество витков. Таким образом, мы можем выбрать другое значение Ø, выбрав другое количество витков.
- Параллельные катушки возбуждения : В этом методе можно получить несколько скоростей путем перегруппировки катушек, как показано на рис. (d).
2. Переменное сопротивление последовательно с якорем
Включив сопротивление последовательно с якорем, можно уменьшить напряжение на якоре. И, следовательно, скорость уменьшается пропорционально этому.
3. Последовательно-параллельное управление
Эта система широко используется в электрической тяге, где используются два или более последовательно соединенных механических двигателя. Для низких скоростей двигатели соединяются последовательно, а для более высоких скоростей двигатели подключаются параллельно.
При последовательном соединении через двигатели проходит одинаковый ток, хотя напряжение на каждом двигателе делится. При параллельном соединении напряжение на каждом двигателе одинаково, хотя ток делится.
Все о шунтирующих двигателях постоянного тока
Электродвигатели принесли нам почти все современные удобства, позволив нам превратить электрическую энергию в физическое движение. Эти машины помогли нам создать такие чудеса, как автомобили, компьютеры, кондиционеры и многое другое, и все это благодаря разнообразию электродвигателей, доступных в промышленности. Двигатель постоянного тока — электродвигатель, в котором используется источник питания постоянного тока, такой как батарея, — является одной из наших самых старых, но наиболее широко используемых конструкций, и в этой статье будет рассмотрен один конкретный двигатель постоянного тока, шунтирующий двигатель постоянного тока. На первый взгляд может быть трудно увидеть уникальные свойства этого двигателя, но эта статья призвана помочь выделить эти различия и показать, почему инженеры могут предпочесть эту конструкцию другим моделям.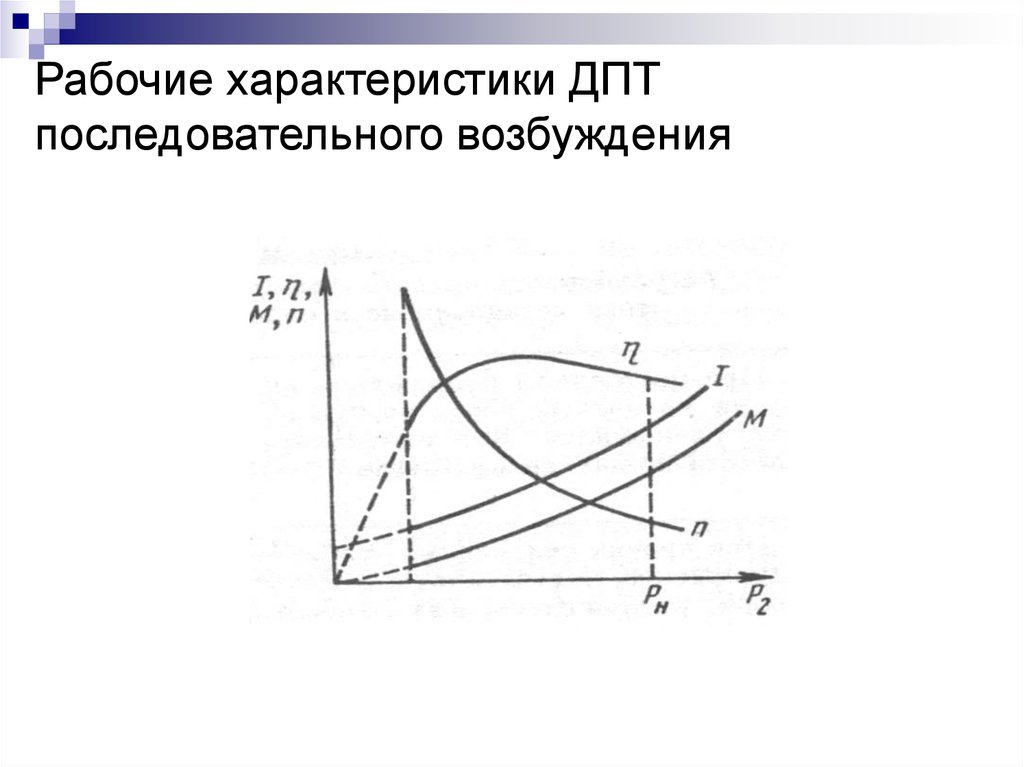 Мы надеемся, что эта статья, изучая настройку, работу и технические характеристики шунтирующих двигателей постоянного тока, поможет разработчикам сделать более осознанный выбор при создании правильной машины для своего приложения.
Мы надеемся, что эта статья, изучая настройку, работу и технические характеристики шунтирующих двигателей постоянного тока, поможет разработчикам сделать более осознанный выбор при создании правильной машины для своего приложения.
Что такое коллекторный двигатель постоянного тока и как он работает?
Шунтирующий двигатель постоянного тока — это просто особый тип щеточного двигателя постоянного тока, поэтому будет полезно сначала объяснить основные принципы, общие для всех этих конструкций (аналогичное объяснение можно найти в нашей статье о двигателях постоянного тока с последовательной обмоткой). Рисунок 1 дает упрощенное представление о том, как работают двигатели постоянного тока, и показан ниже:
Рис. 1: Упрощенная принципиальная схема двигателей постоянного тока. Обратите внимание, что поле статора не включено в схему, так как его размещение зависит от того, как работает двигатель постоянного тока.
Все двигатели постоянного тока состоят из двух основных частей: статора — внешнего корпуса, содержащего поле статора, и ротора — вращающегося компонента, подключенного к источнику питания постоянного тока.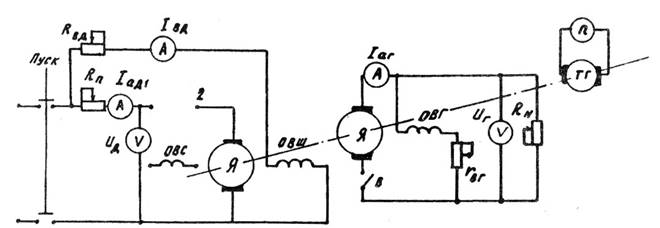 Поле статора может состоять либо из настоящих постоянных магнитов, либо из проволочной обмотки (или «обмотки возбуждения», показанной на рис. 1), которые создают постоянное магнитное поле через узел ротора. Ротор состоит из якоря, обмоток якоря, выходного вала, коллекторов и щеток. Обмотка якоря представляет собой катушку проволоки, которая проходит через якорь или через пластины металла, направляющие обмотки якоря вокруг выходного вала. Эти якорные обмотки оканчиваются на кольцах коммутатора, которые механически отделены от источника постоянного тока (другими словами, они «парят» над выходным валом, ожидая, когда их толкнут щетки). Когда оператор запускает двигатель, щетки защелкиваются на кольцах коллектора и замыкают цепь на рис. 1, заставляя ток течь через щетки, кольца коллектора и обмотки якоря. При этом в якоре создается электромагнитное поле, противодействующее постоянному полю статора. Поскольку ротор может свободно вращаться, взаимодействие между этими двумя полями вызывает вращение выходного вала и, в конечном счете, полезную скорость/крутящий момент.
Поле статора может состоять либо из настоящих постоянных магнитов, либо из проволочной обмотки (или «обмотки возбуждения», показанной на рис. 1), которые создают постоянное магнитное поле через узел ротора. Ротор состоит из якоря, обмоток якоря, выходного вала, коллекторов и щеток. Обмотка якоря представляет собой катушку проволоки, которая проходит через якорь или через пластины металла, направляющие обмотки якоря вокруг выходного вала. Эти якорные обмотки оканчиваются на кольцах коммутатора, которые механически отделены от источника постоянного тока (другими словами, они «парят» над выходным валом, ожидая, когда их толкнут щетки). Когда оператор запускает двигатель, щетки защелкиваются на кольцах коллектора и замыкают цепь на рис. 1, заставляя ток течь через щетки, кольца коллектора и обмотки якоря. При этом в якоре создается электромагнитное поле, противодействующее постоянному полю статора. Поскольку ротор может свободно вращаться, взаимодействие между этими двумя полями вызывает вращение выходного вала и, в конечном счете, полезную скорость/крутящий момент.
Что такое шунтирующие двигатели постоянного тока и как они работают?
Теперь, когда мы показали общие принципы для всех двигателей постоянного тока, давайте взглянем на конкретное расположение шунтирующего двигателя постоянного тока, показанное ниже на рисунке 2:
Рис. 2: Принципиальная схема шунтирующих двигателей постоянного тока. Обратите внимание, что обмотка возбуждения подключена параллельно узлу ротора — это определяющая особенность шунтирующих двигателей постоянного тока.
Обмотка возбуждения, создающая постоянное магнитное поле в статоре, соединяется параллельно или параллельно с обмотками якоря в шунтирующих двигателях постоянного тока. Таким образом, для питания якоря и обмотки возбуждения используется один и тот же источник питания, а общий ток разделяется на два «параллельных» пути.
Обмотка возбуждения в шунтирующих двигателях постоянного тока состоит из множества витков тонкой проволоки, чтобы увеличить силу магнитного поля и ограничить ток через катушку. Таким образом, ток через катушку возбуждения уменьшается и, таким образом, увеличивается в якоре (помните, что при параллельном подключении ток распределяется). Больший ток в якоре создает явление, известное как обратная ЭДС — электродвижущая сила, создаваемая магнитным полем якоря, вращающимся через поле статора, — а обратная ЭДС служит для уменьшения тока через обмотку якоря.
Таким образом, ток через катушку возбуждения уменьшается и, таким образом, увеличивается в якоре (помните, что при параллельном подключении ток распределяется). Больший ток в якоре создает явление, известное как обратная ЭДС — электродвижущая сила, создаваемая магнитным полем якоря, вращающимся через поле статора, — а обратная ЭДС служит для уменьшения тока через обмотку якоря.
По мере увеличения скорости двигателя эта противо-ЭДС увеличивается (поскольку она пропорциональна скорости) и аналогичным образом уменьшается, если вращение якоря замедляется из-за увеличения нагрузки на вал. Это дает шунтирующим двигателям постоянного тока уникальную способность саморегулировать свою скорость, особенно когда на вал воздействует большая нагрузка, и поэтому они в просторечии известны как двигатели с постоянной скоростью. Таким образом, параллельные двигатели имеют низкий пусковой момент, но постоянную скорость; это противоположно двигателям постоянного тока с последовательным возбуждением, у которых высокий пусковой момент, но практически нет регулирования скорости (дополнительную информацию см. в нашей статье о двигателях постоянного тока с последовательным возбуждением). Они также обратимы, просто изменив полярность катушки якоря или катушки возбуждения.
в нашей статье о двигателях постоянного тока с последовательным возбуждением). Они также обратимы, просто изменив полярность катушки якоря или катушки возбуждения.
Полезно знать, на какие значения обращать внимание при выборе шунтирующего двигателя постоянного тока. В этой статье будут кратко рассмотрены некоторые общие спецификации, на которые следует обратить внимание, но знайте, что в большинстве спецификаций содержится гораздо больше информации, чем та, что представлена здесь.
Напряжение якоря/возбуждения
Из-за того, что обмотки якоря и обмотки возбуждения соединены параллельно, на каждый компонент приходится два отдельных напряжения (хотя и не на всю цепь; помните, что они используют один и тот же источник питания). В результате в большинстве спецификаций указаны два номинальных напряжения для шунтирующего двигателя постоянного тока, по одному на каждую катушку, часто с диапазонами. Например, шунтирующий двигатель может иметь напряжение возбуждения 220 В с максимальным значением до 500 В и напряжение якоря 440 В с максимальным значением до 600 В. Обратите внимание, что эти значения зависят от типоразмера и конструкции двигателя. Также обратите внимание, что двигатель постоянного тока никогда не следует использовать с источником питания, напряжение которого ниже его номинального напряжения, так как это снижает производительность и может привести к перегреву.
Например, шунтирующий двигатель может иметь напряжение возбуждения 220 В с максимальным значением до 500 В и напряжение якоря 440 В с максимальным значением до 600 В. Обратите внимание, что эти значения зависят от типоразмера и конструкции двигателя. Также обратите внимание, что двигатель постоянного тока никогда не следует использовать с источником питания, напряжение которого ниже его номинального напряжения, так как это снижает производительность и может привести к перегреву.
Мощность и базовая скорость
Поскольку эти двигатели считаются двигателями с постоянной скоростью, обычно в спецификации указывается базовая скорость, а также соответствующая мощность (в л.с. или кВт). Эти значения показывают, что двигатель может перемещать и как быстро он может перемещать его, хотя двигатели постоянного тока с параллельным подключением могут регулировать свою скорость даже при изменении нагрузки (в пределах безопасных допусков).
Размер/размер рамы
Существуют стандартные размеры рамы, установленные NEMA, чтобы облегчить покупателю замену между продавцами двигателей, но обычно размеры двигателя всегда указываются, если они не стандартизированы. Размер рамы даст разработчику представление о том, как двигатель подойдет для любого конкретного применения, и дает приблизительное представление о том, насколько мощным будет двигатель (хотя размер электродвигателя может ввести в заблуждение, поэтому будьте осторожны).
Размер рамы даст разработчику представление о том, как двигатель подойдет для любого конкретного применения, и дает приблизительное представление о том, насколько мощным будет двигатель (хотя размер электродвигателя может ввести в заблуждение, поэтому будьте осторожны).
Срок службы щетки
Поскольку в шунтирующем двигателе постоянного тока для подключения источника питания к вращающемуся якорю используются щетки, они естественным образом со временем изнашиваются. Большинство двигателей постоянного тока имеют срок службы щеток (в часах), поэтому операторы могут записывать, как долго щетки использовались и когда их нужно заменить. Очень важно обслуживать эти двигатели, заменяя щетки при необходимости, иначе они могут выйти из строя или перестать работать.
Области применения и критерии выбора
В отличие от серийных двигателей постоянного тока, шунтирующие двигатели постоянного тока лучше всего подходят для приложений с постоянной скоростью благодаря своей конструкции с обратной связью. Они могут поддерживать точное число оборотов и крутящий момент даже при различных условиях нагрузки, что делает их полезными для деревообрабатывающего оборудования, шлифовальных станков или любого другого вращающегося электроинструмента, где пользователь будет толкать против вращения. Обратите внимание, что эти двигатели имеют низкий пусковой крутящий момент, поэтому эти двигатели не могут быть подключены к большой нагрузке при запуске и должны ожидать использования на номинальной скорости. Они также немного теряют скорость при большой нагрузке, так как ни один электродвигатель не работает в идеальных условиях, и все испытывают потери.
Они могут поддерживать точное число оборотов и крутящий момент даже при различных условиях нагрузки, что делает их полезными для деревообрабатывающего оборудования, шлифовальных станков или любого другого вращающегося электроинструмента, где пользователь будет толкать против вращения. Обратите внимание, что эти двигатели имеют низкий пусковой крутящий момент, поэтому эти двигатели не могут быть подключены к большой нагрузке при запуске и должны ожидать использования на номинальной скорости. Они также немного теряют скорость при большой нагрузке, так как ни один электродвигатель не работает в идеальных условиях, и все испытывают потери.
Эти двигатели очень просты в установке, с возможностью работы с регуляторами скорости. Чаще всего они используются в вышеупомянутых электроинструментах, а также в автомобильных стеклоочистителях, автомобильных окнах, компьютерных вентиляторах и т. д. Хотя изначально шунтирующие двигатели постоянного тока не такие мощные, как их родственники с последовательной обмоткой, они не колеблются при обеспечении своей механической мощности, обеспечивая пользователям постоянство по сравнению с чистой выходной мощностью.
