Как устроены современные электродвигатели с цифровым управлением. Какие существуют типы таких двигателей. Каков принцип их работы. Какие параметры важны при выборе электродвигателя с цифровым управлением. Кто является ведущими производителями на рынке. Каковы перспективы развития этой технологии.
Типы электродвигателей с цифровым управлением
Современные электродвигатели с цифровым управлением можно разделить на несколько основных типов:
- Бесщеточные двигатели постоянного тока (BLDC)
- Синхронные двигатели с постоянными магнитами (PMSM)
- Асинхронные двигатели с векторным управлением
- Шаговые двигатели с микрошаговым режимом
- Линейные двигатели с цифровым позиционированием
Каждый из этих типов имеет свои преимущества и области применения. Например, BLDC двигатели отличаются высокой эффективностью и компактностью, что делает их популярными в бытовой технике и электротранспорте. PMSM двигатели обеспечивают высокую точность управления и применяются в промышленных приводах. Асинхронные двигатели с векторным управлением широко используются в промышленности благодаря надежности и низкой стоимости.

Устройство электродвигателя с цифровым управлением
Типичный электродвигатель с цифровым управлением состоит из следующих основных компонентов:
- Статор с обмотками
- Ротор (может содержать постоянные магниты или электромагниты)
- Датчики положения ротора (энкодеры, датчики Холла)
- Силовой электронный преобразователь (инвертор)
- Микроконтроллер или цифровой сигнальный процессор
- Интерфейсы для связи с внешними системами управления
Ключевым отличием от классических двигателей является наличие встроенной электроники, которая обеспечивает точное управление током и магнитным полем. Это позволяет реализовать сложные алгоритмы управления, недоступные для двигателей с простым частотным или релейным управлением.
Принцип работы цифрового электропривода
Принцип работы электродвигателя с цифровым управлением можно описать следующим образом:
- Микроконтроллер получает команду на движение от внешней системы управления
- На основе показаний датчиков положения ротора рассчитывается текущая скорость и положение
- Выполняется расчет требуемых токов в обмотках статора для достижения заданного движения
- Силовой преобразователь формирует напряжение на обмотках в соответствии с рассчитанными токами
- Процесс повторяется с высокой частотой (до десятков кГц), обеспечивая плавное и точное движение
Такой подход позволяет реализовать векторное управление, при котором ток и магнитный поток в двигателе контролируются независимо. Это обеспечивает высокую динамику и энергоэффективность привода.

Ключевые параметры электродвигателей с цифровым управлением
При выборе электродвигателя с цифровым управлением важно учитывать следующие ключевые параметры:
- Номинальная мощность и крутящий момент
- Диапазон регулирования скорости
- Точность позиционирования
- Динамические характеристики (время разгона/торможения)
- КПД в различных режимах работы
- Интерфейсы управления (аналоговые, цифровые, промышленные сети)
- Функции защиты и диагностики
- Габариты и способ монтажа
Важно отметить, что современные цифровые электроприводы часто имеют возможность адаптивной настройки параметров регуляторов. Это позволяет оптимизировать работу двигателя под конкретную нагрузку и условия эксплуатации.
Ведущие производители электродвигателей с цифровым управлением
На рынке электродвигателей с цифровым управлением можно выделить следующих ключевых производителей:
- Siemens (Германия) — лидер в области промышленных электроприводов
- ABB (Швейцария) — широкий спектр решений для различных отраслей
- Schneider Electric (Франция) — комплексные решения для автоматизации
- Yaskawa (Япония) — высокоточные сервоприводы для робототехники
- Danfoss (Дания) — преобразователи частоты и электроприводы для ЖКХ
- Bosch Rexroth (Германия) — электроприводы для станков и спецтехники
Среди российских производителей можно отметить компании «Электропривод» и «ЧЭАЗ», которые разрабатывают современные цифровые электроприводы для различных отраслей промышленности.

Перспективы развития электродвигателей с цифровым управлением
Технологии цифрового управления электродвигателями продолжают активно развиваться. Основные направления развития включают:
- Повышение энергоэффективности за счет оптимизации алгоритмов управления
- Интеграция функций предиктивной диагностики на основе анализа больших данных
- Упрощение процесса настройки и ввода в эксплуатацию за счет автоматизации
- Расширение функций самодиагностики и защиты
Ожидается, что развитие технологий искусственного интеллекта позволит создать самообучающиеся электроприводы, способные адаптироваться к изменяющимся условиям работы без вмешательства человека.
Применение электродвигателей с цифровым управлением в различных отраслях
Электродвигатели с цифровым управлением находят широкое применение в различных отраслях промышленности и транспорта:
- Промышленные роботы и станки с ЧПУ
- Электромобили и гибридные автомобили
- Бытовая техника (стиральные машины, холодильники)
- Лифтовое оборудование
- Насосы и компрессоры
- Ветрогенераторы
- Авиационная и космическая техника
В каждой из этих областей цифровое управление позволяет существенно повысить эффективность и расширить функциональные возможности оборудования. Например, в электромобилях цифровое управление двигателем обеспечивает оптимальный баланс между мощностью и экономичностью в различных режимах движения.

Преимущества и недостатки электродвигателей с цифровым управлением
Электродвигатели с цифровым управлением имеют ряд преимуществ по сравнению с классическими двигателями:
- Высокая точность и плавность регулирования скорости
- Возможность точного позиционирования
- Высокий КПД во всем диапазоне скоростей
- Быстрая реакция на изменение нагрузки
- Широкие возможности по интеграции в системы автоматизации
- Расширенные функции защиты и диагностики
Однако у этих двигателей есть и некоторые недостатки:
- Более высокая стоимость по сравнению с классическими двигателями
- Необходимость в квалифицированном обслуживающем персонале
- Потенциальная уязвимость к электромагнитным помехам
- Сложность ремонта в полевых условиях
Несмотря на эти недостатки, преимущества цифрового управления в большинстве случаев перевешивают, что обуславливает растущую популярность таких двигателей.
Разработан бесконтактный электродвигатель постоянного тока
Skip to main content
Создание новых электрических машин. Прикладные разработки в области электромеханики
Российская Федерация, г.Воронеж
+7(473)202-87-47
You are here
Главная > Проекты > Разработан бесконтактный электродвигатель постоянного тока со встроенным цифровым блоком управления в герметичном исполнении ДБ80-Д12
Заказчик:
АО «Елецгидроагрегат»
Разработан, прошел испытания в составе изделия бесконтактный электродвигатель постоянного тока со встроенным цифровым блоком управления в герметичном исполнении ДБ80-Д12.
Указанный электродвигатель предназначен для применения в составе электронасосных агрегатов типа ЭЦН производства АО «Елецгидроагрегат», для комплектования специзделий АО «БАЗ», АО «Витязь», ОАО «Арзамасский машиностроительный завод», ОАО «Мытищинский машиностроителный завод» и др, поставляемых в интересах МО РФ в рамках ГОЗ.
Бесконтактный электродвигатель постоянного тока со встроенной системой управления, состоящий из двух основных узлов – электродвигателя и коммутатора. Конструктивно коммутатор размещен в одном корпусе с электродвигателем. Электродвигатель выполнен в герметичном исполнении со степенью защиты IP67. Реализована возможность многообразных режимов управления (режим «форсаж»).
Электродвигатель предназначен для работы при температуре окружающей среды от -50 ◦С до +50 ◦С, устойчив к вибрациям с ускорением 50 м/с2 в диапазоне частот 20-500 Гц. Ресурс электродвигателя в составе изделия более 4000 часов. Электродвигатель применяется в составе электронасосного агрегата для изделий спецтехники.
Электродвигатель предназначен для замены морально устаревших коллекторных машин
|
Наименование параметра |
Ед. изм. |
Электродвигатель бесконтактный ДБ80-55-5,5-27-Д12 |
Электродвигатель коллекторный постоянного тока 2ДП65-55-5-27-С01-Р09 |
Электродвигатель коллекторный постоянного тока ДП60-55-5-27-С01-Р09 |
|
Номинальное напряжение питания |
В |
27 |
27 |
27 |
|
Номинальная мощность |
Вт |
55 |
55 |
55 |
|
Номинальный момент |
Н·м |
0,095 |
0,095 |
0,095 |
|
Номинальная частота вращения, не менее |
об/мин |
5000 |
5000 |
5000 |
|
Потребляемый ток, не более |
А |
3 |
4 |
4 |
|
КПД, не менее |
% |
78,0 |
51,0 |
51,0 |
|
Герметичная конструкция электродвигателя |
– |
Да |
Да |
Нет |
|
Возможность реализации режима «форсаж» (повышенный номинальный момент и скорость вращения) |
– |
Да |
Нет |
Нет |
|
Ресурс электродвигателя |
ч |
4000 |
500 |
500 |
|
Масса |
г |
1900 |
1700 |
1290 |
Индивидуальные проекты
Если вы не нашли интересующую продукцию мы готовы рассмотреть вопрос разработки и освоения в производстве электродвигателей под Ваши индивидуальные требования.
Для проработки данного вопроса, пожалуйста, заполните опросный лист или свяжитесь с нами по телефону +7(473) 202-87-47 или e-mail [email protected]
Заполнить опросный лист
АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД ОБЩЕПРОМЫШЛЕННОГО НАЗНАЧЕНИЯ С ПРЯМЫМ ЦИФРОВЫМ УПРАВЛЕНИЕМ И РАЗВИТЫМИ ИНТЕЛЛЕКТУАЛЬНЫМИ СВОЙСТВАМИ
УДК:621.3.072.6
АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД ОБЩЕПРОМЫШЛЕННОГО НАЗНАЧЕНИЯ С ПРЯМЫМ ЦИФРОВЫМ УПРАВЛЕНИЕМ И РАЗВИТЫМИ ИНТЕЛЛЕКТУАЛЬНЫМИ СВОЙСТВАМИ
А.Б. Виноградов, В.Л. Чистосердов, А.Н. Сибирцев, Д.А. Монов
В последние годы существенно вырос потребительский спрос
на частотно-регулируемый электропривод общепромышленного назначения. К нему
обычно не предъявляется повышенных статических и динамических требований,
диапазон регулирования скорости не превышает 50:1. На первый план выходят
показатели надежности, экономичности, удобство в эксплуатации, объем дополнительных функциональных возможностей, предоставляемых
потребителю наряду с основным режимом работы привода — режимом регулирования
частоты вращения.
Асинхронный электропривод с преобразователем частоты
мощностью 5.5-55 кВт, разработанный в научно-исследовательской лаборатории
«Вектор» кафедры электропривода Ивановского государственного
энергетического университета в целом не уступает своим зарубежным аналогам, а
по ряду технических характеристик и функциональных возможностей существенно их
превосходит. Его отличительными особенностями являются: повышенный
коэффициент использования источника питания за счет заложенного в нем принципа
пространственно-векторного формирования выходного напряжения, удобный и
понятный интерфейс, адаптированный под русскоязычного пользователя, наличие
функций самонастройки на параметры объекта регулирования, высокая информативность,
простота в эксплуатации, стоимость, как минимум в 1.5 раза меньшая своих самых
дешевых зарубежных аналогов.
Его отличительными особенностями являются: повышенный
коэффициент использования источника питания за счет заложенного в нем принципа
пространственно-векторного формирования выходного напряжения, удобный и
понятный интерфейс, адаптированный под русскоязычного пользователя, наличие
функций самонастройки на параметры объекта регулирования, высокая информативность,
простота в эксплуатации, стоимость, как минимум в 1.5 раза меньшая своих самых
дешевых зарубежных аналогов.
Область применения электропривода — механизмы вентиляторов, насосов, подъемно-транспортных средств, приводы главного движения и вспомогательных механизмов металлорежущих и деревообрабатывающих станков и других общепромышленных механизмов с диапазоном регулирования скорости до 50:1.
Преобразователь частоты включает трехфазный неуправляемый выпрямитель, трехфазный мостовой IGBT- инвертор с модулем торможения, микропроцессорную систему управления.
Среди технических характеристик и функциональных возможностей электропривода, более подробно изложенных в [1], отметим следующее:
Частота выходного
напряжения регулируется в диапазоне от 0 до 400 Гц, что позволяет использовать
преобразователь частоты не только с двигателем основного исполнения (380 В, 50 Гц), но и для управления высокоскоростными электрошпинделями станков.
В основу построения базовой структуры системы управления положен принцип пространственно-векторного формирования алгоритма управления [2,3] и принцип векторной ориентации переменных друг относительно друга в установившихся режимах работы электропривода. Первый обеспечивает улучшенный гармонический состав выходного напряжения преобразователя и повышенные энергетические характеристики электропривода; второй — хорошие регулировочные характеристики привода за счет раздельного управления электромагнитным моментом и потокосцеплением [4].
Расчеты и экспериментальные исследования, проведенные в рамках
госбюджетных и хоздоговорных НИР (отчет о НИР/ ИГЭУ «Интеллектуальный
асинхронный электропривод нового поколения с прямым цифровым векторным
управлением» № гос. рег.
01990001575, инв №
02.99.0003169, Иваново,1999, 79 стр.) показали, что в электроприводах
рассматриваемого класса в диапазоне регулирования частоты вращения 10:1
удовлетворительные механические характеристики обеспечиваются с помощью ориентации
по вектору напряжения статора, а в диапазоне 50:1 – с помощью
ориентации по вектору ЭДС статора. Характеристики электропривода наиболее
чувствительны к точности ориентации на малых частотах вращения, где частота
вращения соизмерима с номинальным скольжением. Следовательно, математическая
модель асинхронного двигателя (АД), положенная в основу построения системы
управления, должна быть прежде всего ориентирована на
точность вычислений в области малых частот, что позволяет ее существенно
упростить без значительного ущерба для характеристик электропривода, снизив тем
самым объем вычислительной работы. В области малых частот справедливы следующие
соотношения между параметрами схемы замещения АД [2]:
Характеристики электропривода наиболее
чувствительны к точности ориентации на малых частотах вращения, где частота
вращения соизмерима с номинальным скольжением. Следовательно, математическая
модель асинхронного двигателя (АД), положенная в основу построения системы
управления, должна быть прежде всего ориентирована на
точность вычислений в области малых частот, что позволяет ее существенно
упростить без значительного ущерба для характеристик электропривода, снизив тем
самым объем вычислительной работы. В области малых частот справедливы следующие
соотношения между параметрами схемы замещения АД [2]:
.
Это позволяет пренебречь индуктивностями рассеяния статора и ротора, присутствующими в традиционных математических моделях АД, в частности, перейти от традиционной Т- образной схемы замещения фазы двигателя к упрощенной Т- образной схеме замещения.
Применение упрощенной
модели для вычисления переменных электропривода на средних и больших частотах вращения
приводит к рассогласованию между заданным и реальным значениями частоты
вращения. Однако, в рабочих режимах электропривода это
рассогласование не превышает 2-3% от частоты вращения, что вполне допустимо для
приводов рассматриваемого класса.
Однако, в рабочих режимах электропривода это
рассогласование не превышает 2-3% от частоты вращения, что вполне допустимо для
приводов рассматриваемого класса.
Функциональная схема электропривода изображена на рис.1. Блок ввода и предварительной обработки сигналов (БВПО) (рис.2) включает в себя переключатель режима работы, фильтр входного сигнала, технологический регулятор и задатчик интенсивности. Переключатель режима устанавливает один из трех режимов работы БВПО. При среднем положении переключателя режимов на выход БВПО поступает сигнал задания скорости электропривода с аналогового входа, при верхнем положении – сигнал с выхода технологического регулятора, при нижнем положении – цифровое задание скорости. При верхнем положении переключателя аналоговый вход БПВО используется для ввода в систему управления сигнала с датчика обратной связи по технологической переменной.
Рис.1. Функциональная схема системы управления электроприводом
Рис. 2.
Функциональная схема блока ввода и предварительной обработки сигналов
2.
Функциональная схема блока ввода и предварительной обработки сигналов
Фильтр входного сигнала, выполненный в виде апериодического звена 1-го порядка с постоянной времени , осуществляет низкочастотную фильтрацию помех в сигнале, поступающем на аналоговый вход системы управления.
Технологический регулятор реализован в виде пропорционально-интегрально-дифференцирующего звена, дополнительно снабженного элементами ограничения и «зона нечувствительности».
Задатчик интенсивности формирует динамические характеристики электропривода по каналу управления, задавая время разгона и время торможения .
Наблюдатель осуществляет вычисление всех переменных необходимых для реализации алгоритма управления электроприводом в соответствии со следующей системой уравнений:
(1)
где — базовое значение напряжения в звене постоянного напряжения
ПЧ, равное напряжению в звене, при котором реальное выходное напряжение
преобразователя совпадает со своим заданным значением; — угловые положения векторов напряжения и ЭДС относительно
фазы статора; — проекции тока статора в системе координат , ориентированной по вектору напряжения статора; — проекции тока статора в системе координат , ориентированной по вектору ЭДС.
Для упрощенной схемы замещения двигателя токи ротора и намагничивания определяются соотношениями
. (2)
Формирователь частоты (рис.3) осуществляет вычисление заданного значения частоты напряжения статора . Он включает в себя блок компенсации скольжения, блок частотно-токового ограничения, блок коррекции и ограничитель выходного сигнала. Блок компенсации скольжения формирует на своем выходе промежуточный сигнал задания по частоте , учитывающий наличие скольжения
где — задание по электрической частоте вращения ротора.
Необходимость изменения структуры блока компенсации скольжения на малых частотах связана с ограниченным частотным диапазоном ориентации по ЭДС.
Рис. 3. Функциональная
схема формирователя частоты
3. Функциональная
схема формирователя частоты
Блок частотно-токового ограничения осуществляет формирование электромеханической характеристики электропривода в области больших (превышающих номинальный) токов нагрузки. Блок работает в соответствии со следующими уравнениями:
где — модуль и знак сигнала частотно-токового ограничения ; — уставка срабатывания частотно-токового ограничения; — безразмерный коэффициент, определяющий крутизну наклона электромеханической характеристики в области частотно-токового ограничения.
Блок коррекции,
выполненный в виде апериодического звена первого порядка с постоянной времени , осуществляет последовательную коррекцию динамических характеристик
электропривода. Выходной сигнал блока коррекции поступает на выход
формирователя частоты через ограничитель,
устанавливающий значения верхнего и нижнего порога задания по частоте.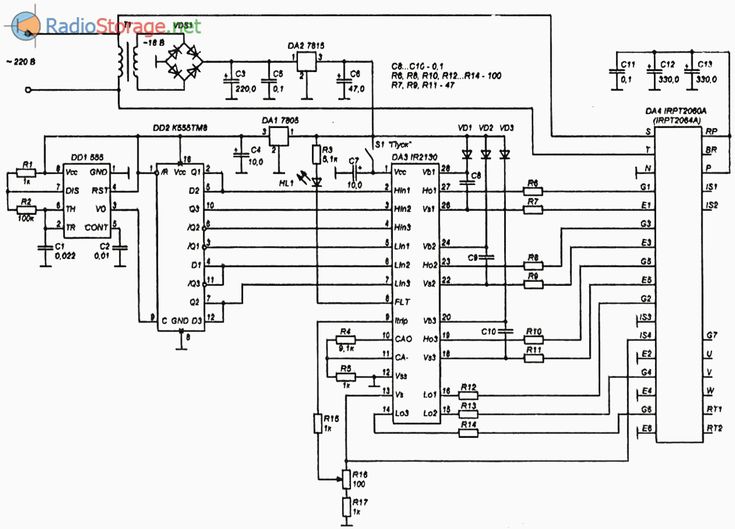
Формирователь напряжения (рис.4) включает в себя формирователь закона управления, корректор режима малых частот, регулятор реактивного тока, блок токовой отсечки, блок гармонической коррекции, блок динамической коррекции. Входными сигналами формирователя напряжения являются задание по частоте , ток статора и ток цепи намагничивания .
Формирователь закона управления вычисляет зависимости заданных значений ЭДС и тока намагничивания от частоты на основе информации о номинальном токе намагничивания , определяемом на этапе автонастройки, и относительных значениях тока намагничивания , задаваемых с пульта управления. При определении и для текущего значения частоты используется линейная аппроксимация зависимостей между крайними точками частотного отрезка, которому принадлежит текущее значение частоты. Работа формирователя строится по следующему алгоритму:
1)
Определяется
отрезок частотного диапазона, которому принадлежит текущее значение частоты .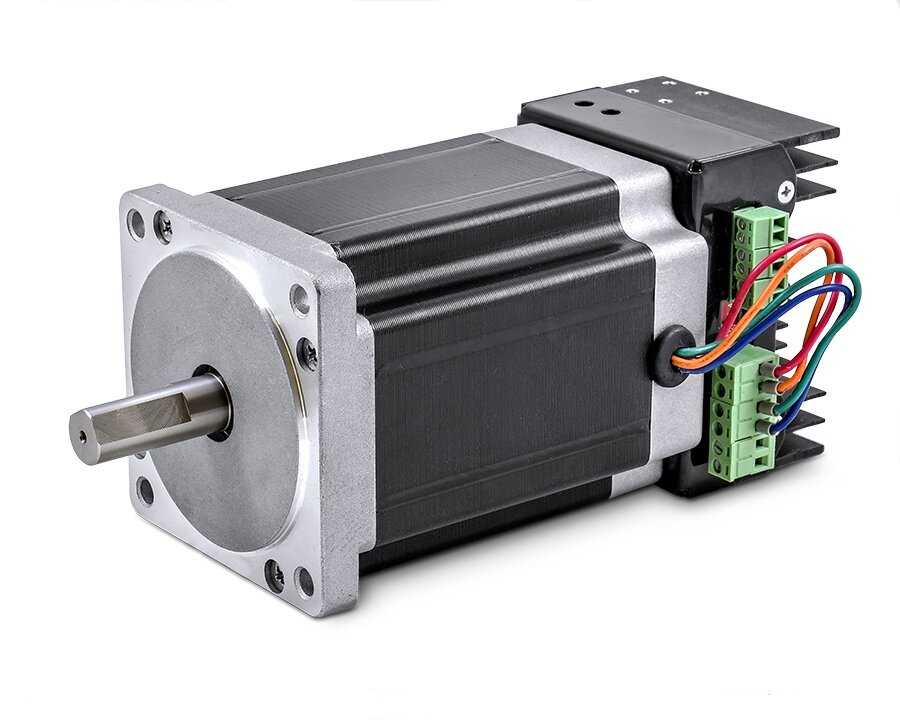
2) Определяется текущее значение относительного тока намагничивания
где — относительные значения тока намагничивания в крайних точках отрезка частоты.
3) Определяются текущие значения задания по току намагничивания и ЭДС:
где — номинальные значения напряжения и частоты двигателя.
Рис. 4. Функциональная схема формирователя напряжения
Корректор режима малых частот
обеспечивает нормальное функционирование электропривода вплоть до полного его
останова. Для этого на определенном уровне частоты , при котором точность вычисления становится недопустимо
низкой, производится отключение регулятора реактивного тока. В дополнение к
этому в прямой канал формирования напряжения вводится добавка в виде , обеспечивающая наличие необходимого уровня напряжения и
тока статора при нулевой частоте вращения электропривода. Относительно
небольшая величина этой добавки позволяет сделать ее включенной постоянно. Придействие этой добавки наряду с другими
малыми невязками в формировании закона управления компенсируются регулятором
реактивного тока.
Относительно
небольшая величина этой добавки позволяет сделать ее включенной постоянно. Придействие этой добавки наряду с другими
малыми невязками в формировании закона управления компенсируются регулятором
реактивного тока.
Регулятор реактивного тока обеспечивает поддержание тока намагничивания на уровне, задаваемом формирователем закона управления. Чтобы устранить статическую ошибку регулирования тока намагничивания регулятор выполнен интегральным с постоянной времени и ограничением выходного сигнала .
Блок токовой отсечки реализует второй
уровень ограничения тока статора, осуществляемый дополнительным воздействием на
канал формирования напряжения. Блок работает следующим образом. Если ток
статора не превышает уровень уставки токовой отсечки , то блок токовой отсечки передает входной сигнал задания по
напряжению на свой выход без
каких-либо изменений. В противном случае, на дополнительный вход суммирующего
элемента блока через корректирующий фильтр токовой отсечки подается с отрицательным
знаком его входной сигнал задания по напряжению. В результате
передаточная функция блока токовой отсечки принимает вид реального
дифференцирующего звена с постоянной времени . Выходной сигнал начинает уменьшаться
по экспоненциальному закону от значения до нуля. Если
при этом ток статора уменьшается ниже уровня уставки
токовой отсечки ,
то блок начинает работать в режиме переключений, обеспечивая поддержание
среднего значения тока статора на уровне уставки. Возвращение системы управления из режима токовой отсечки в
нормальный режим работы также происходит с постоянной времени фильтра токовой
отсечки , что исключает нежелательные резкие скачки в напряжении
задания.
В результате
передаточная функция блока токовой отсечки принимает вид реального
дифференцирующего звена с постоянной времени . Выходной сигнал начинает уменьшаться
по экспоненциальному закону от значения до нуля. Если
при этом ток статора уменьшается ниже уровня уставки
токовой отсечки ,
то блок начинает работать в режиме переключений, обеспечивая поддержание
среднего значения тока статора на уровне уставки. Возвращение системы управления из режима токовой отсечки в
нормальный режим работы также происходит с постоянной времени фильтра токовой
отсечки , что исключает нежелательные резкие скачки в напряжении
задания.
Блок
гармонической коррекции
осуществляет стыковку участков синхронного алгоритма модуляции по амплитуде
основной гармоники выходного напряжения преобразователя. Сколь нибудь заметное воздействие этого блока на канал
формирования напряжения проявляется только на больших частотах работы
электропривода .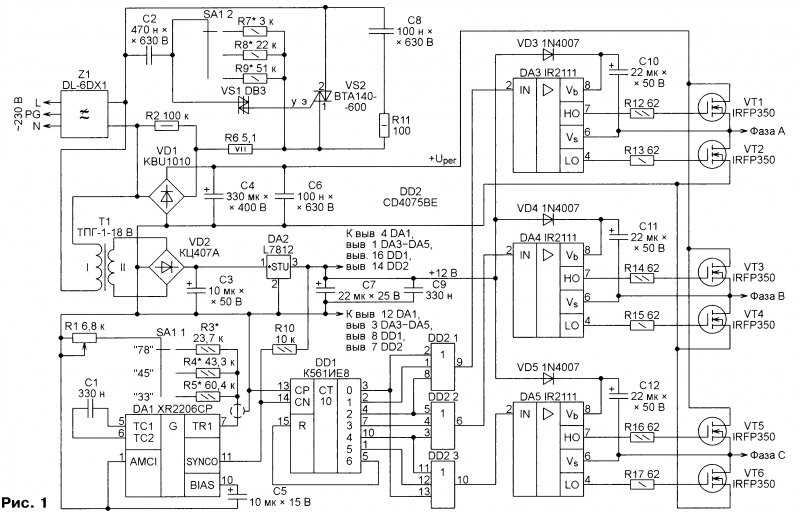 При коэффициент
гармонической коррекции . Всего алгоритм модуляции выходного напряжения содержит 32
участка, из которых один – асинхронный. Коэффициенты коррекции определяются на
границах синхронных участков. Внутри каждого участка их расчет осуществляется
на основе линейной аппроксимации коэффициентов на границах.
При коэффициент
гармонической коррекции . Всего алгоритм модуляции выходного напряжения содержит 32
участка, из которых один – асинхронный. Коэффициенты коррекции определяются на
границах синхронных участков. Внутри каждого участка их расчет осуществляется
на основе линейной аппроксимации коэффициентов на границах.
Блок динамической коррекции обеспечивает формирование желаемого запаса устойчивости электропривода во всем диапазоне регулирования частоты. Сигналы задания по частоте с выхода формирователя частоты и по амплитуде напряжения статора с выхода формирователя напряжения подаются на вход модулятора, который осуществляет формирование импульсов управления шестью транзисторными ключами инвертора напряжения на основе принципов пространственно-векторной модуляции.
Характерной особенностью асинхронных
электроприводов нового поколения, к которым относится представляемая
разработка, является наличие в их арсенале ряда дополнительных
«интеллектуальных» режимов работы, существенно расширяющих функциональные
возможности привода. К ним будем относить:
К ним будем относить:
- самотестирование, при котором электропривод сам проверяет исправность всех своих элементов, выявляет, локализует и диагностирует возможные неисправности;
- автоматическая настройка системы управления на параметры силового канала электропривода;
- режим повышенного энергосбережения;
- режим «самоподхвата» на заранее неизвестной частоте вращения;
- режим автоматического перезапуска и другие;
В
режиме автоматической настройки
электропривод на основе предварительно введенной с пульта управления информации
о номинальном напряжении двигателя , номинальном токе статора , номинальной частоте , номинальном скольжении , номинальном коэффициенте мощности , числе пар полюсов в автоматическом режиме работы определяет
активное сопротивление статорной цепи , индуктивность намагничивания , активное сопротивление ротора и рассчитывает все
параметры системы управления.
Определение активного сопротивления статорной цепи осуществляется в режиме «неподвижного» вектора, соответствующего формированию на обмотках статора постоянного эквивалентного напряжения. Операции выполняются в следующей последовательности:
1) Определяется уровень постоянного напряжения, соответствующий номинальному току двигателя, в режиме пошагового инкрементирования задания по выходному напряжению и контроля амплитуды тока на каждом шаге.
2) Производится серия замеров тока статора на установленном уровне постоянного напряжения.
3) Вычисляется активное сопротивление статорной цепи по формуле:
где , — число замеров тока статора.
Определение
индуктивности намагничивания
осуществляется в режиме холостого хода на частоте, близкой к номинальной
частоте двигателя. Напряжение статора формируется в соответствии со следующим
законом:
Напряжение статора формируется в соответствии со следующим
законом:
Система управления разомкнута за исключением цепей, осуществляющих динамическую коррекцию. Электропривод разгоняется до заданной частоты и выполняется серия из замеров тока статора. Индуктивность намагничивания рассчитывается по формуле:
где — ЭДС и ток намагничивания на -м интервале измерения, рассчитываемые в соответствии с (1,2).
Активное сопротивление роторной цепи вычисляется на основании упрощенной схемы замещения АД по формуле
где — расчетные значения токов ротора и намагничивания для
номинального режима работы двигателя; — ЭДС для номинального режима работы, вычисляемая
по (1) с учетом следующих соотношений: ; .
Режим «самоподхвата» на заранее неизвестной частоте вращения позволяет осуществлять подключение к преобразователю двигателей с вращающимся валом, обеспечивая при этом минимизацию переходных процессов. Эффект достигается за счет предварительного определения частоты вращения вала двигателя и выдачи на его зажимы напряжения с расчетным значением частоты. Особенно актуален данный режим для механизмов с большими моментами инерции, так как позволяет не тратить время и энергию на останов и последующий разгон электроприводов с нулевой частоты.
Определение
частоты вращения вала двигателя, который был на какое-то время отключен от
преобразователя, осуществляется в поисковом режиме работы. Основными параметрами
режима «самоподхвата» являются бит
направления поиска, максимальная и минимальная граничные частоты
поиска, постоянная времени поиска , задающая его темп и временные выдержки на затухание
переходных процессов. Поиск осуществляется по следующему алгоритму:
Поиск осуществляется по следующему алгоритму:
1) После отключения двигателя от преобразователя выдерживается временная пауза на затухание электромагнитных переходных процессов.
2) Двигатель включается на пониженное напряжение с частотой в заданном направлении поиска и после малой выдержки времени на затухание переходного процесса осуществляется снижение частоты напряжения с темпом, задаваемым , в направлении .
3) В режиме поиска осуществляется анализ тока статора. Критерием определения искомой частоты вращения вала является явно выраженный (глобальный) минимум тока статора, проявляющийся на электромеханической характеристике привода в режиме идеального холостого хода, то есть когда частота питающего напряжения равна частоте вращения вала.
4)
Если в
заданном направлении искомая частота не обнаружена, то поиск производится в
противоположном направлении в той же последовательности (может быть
заблокирован).
5) Если искомая частота не обнаружена в обоих направлениях поиска (глобальный минимум тока отсутствует), то пуск электропривода осуществляется с нулевой частоты.
В режиме повышенного энергосбережения электропривод в результате выполнения поисковой процедуры самостоятельно выбирает такое соотношение параметров сигнала управления, что при текущих параметрах нагрузки обеспечивается минимальное потребление электрической энергии. Критерием достижения данного режима принимается минимум выходной мощности преобразователя, усредненной на определенном расчетном интервале (периоде поиска)
,
где — число выборок переменных на периоде поиска.
Высокие показатели энергосбережения обеспечивает также применение критерия минимизации тока статора .
Для
того чтобы поисковая процедура не приводила к неустойчивой работе электропривода
и выходу переменных за пределы допустимых значений, допустимая область поиска
ограничивается своей верхней и нижней границами, которые исчисляются в процентном
отношении от базового напряжения, определяемого по базовому (жестко заданному)
закону частотного управления. Поисковая процедура организуется по следующему алгоритму:
Поисковая процедура организуется по следующему алгоритму:
1) Выполняется пробный шаг изменения амплитуды напряжения при текущем значении частоты.
2) После выдержки времени на затухание переходной составляющей поискового процесса осуществляется измерение выходной мощности преобразователя.
3) В результате анализа выходной мощности по отношению к предыдущим замерам определяется направление дальнейшего поиска.
Основными
параметрами поискового алгоритма являются шаг поиска, границы области поиска,
нижний предел частоты, до которой осуществляется поиск, период поиска . Наибольший эффект от режима повышенного энергосбережения
достигается при работе электропривода в режимах малых нагрузок. При
загруженности электропривода свыше 60% эффект незначителен. Вследствие
некоторой инерционности поискового алгоритма режим повышенного
энергосбережения рекомендован для электроприводов с достаточно
плавным изменением нагрузки в рабочих режимах.
Представленный электропривод прошел производственные испытания и внедрен на предприятиях различных сфер народного хозяйства. В частности, эффект от его внедрения на насосных станциях подкачки воды в жилые дома г. Иваново составил до 70% экономии электроэнергии и до 40% экономии воды. Освоено промышленное серийное производство электропривода.
Список литературы
1. Виноградов А. Б., Чистосердов В. Л., Сибирцев А. Н. Частотно-регулируемый электропривод переменного тока нового поколения // Привод и управление. – 2000. — №0.- c. 21-24.
2. Архангельский Н.Л., Курнышев Б.С., Виноградов А.Б. Новые алгоритмы в управлении асинхронным электроприводом // Электротехника. – 1991.- №10.- с. 9-13.
3. Архангельский Н.Л., Чистосердов В.Л. Формирование алгоритмов управления в частотно-управляемом электроприводе // Электротехника. – 1994.- №3.- с. 48-52.
4.
Система
векторного управления асинхронным электроприводом с идентификатором состояния/
Архангельский Н. Л., Курнышев Б.С., Виноградов А.Б.,
Лебедев С.К. // Электричество. — 1991. — №11. — с. 47-51.
Л., Курнышев Б.С., Виноградов А.Б.,
Лебедев С.К. // Электричество. — 1991. — №11. — с. 47-51.
Цифровые двигатели, программное обеспечение и развитие Интернета вещей
В основе современного общества лежит множество технологий, от двигателя внутреннего сгорания до микропроцессора. Но есть один, который, похоже, станет еще более важным: электродвигатель.
Благодаря тому, что Tesla S делает электромобиль видимой альтернативой, а электрический самолет впервые совершает трансконтинентальный перелет, скромный электродвигатель снова играет в высшей лиге. И программное обеспечение играет ключевую роль.
Набор двигателей Dyson с цифровым управлением (включая прототип платы управления) наряду с традиционным электродвигателем.
Конечно, это не только видимые моторы. Электродвигатели везде и во всем. Мощные и эффективные, они способны развивать крутящий момент там и тогда, где это необходимо. Но есть один недостаток: они часто бывают громоздкими, а угольные щетки, используемые для переключения между обмотками ротора двигателя, выветриваются, оставляя после себя мелкую пыль. Их тоже нужно охлаждать.
Их тоже нужно охлаждать.
Меня всегда восхищали электродвигатели, и недавно у меня была возможность встретиться с Дайсоном, чтобы взглянуть на последнюю версию конструкции их двигателя – они говорят, что это значительное улучшение по сравнению с традиционным электродвигателем. Он, безусловно, компактен, примерно вдвое меньше аналогичного традиционного двигателя. Этот дизайн существует уже давно, но теперь он используется почти в каждом устройстве, которое производит Dyson, и компания создала завод только для производства двигателей.
Импульсный реактивный двигатель Dyson
«Цифровой» двигатель Дайсона — это то, что известно как импульсно-реактивный двигатель. Вместо того, чтобы питать ротор, вентильный реактивный двигатель имеет магнитный сердечник, поэтому, когда питание переключается через катушки статора, магнитный сердечник перемещается, чтобы выровняться с магнитным полем, которое они генерируют. Имея на роторе больше катушек, чем магнитных полюсов, можно настроить схему переключения в катушках, которая будет вращать ротор. Это означает использование датчиков и сложных коммутационных схем, поскольку контроль магнитных полей в двигателе является ключом к созданию эффективного двигателя.
Это означает использование датчиков и сложных коммутационных схем, поскольку контроль магнитных полей в двигателе является ключом к созданию эффективного двигателя.
Импульсные реактивные двигатели, подобные этому, могут быть очень эффективными, и Dyson утверждает, что их двигатель имеет КПД 84% (по сравнению с 40% для традиционного электродвигателя). Можно многое сказать о таком компактном, мощном двигателе — не только для пылесосов и сушилок для рук. Это также означало использование большого количества инструментов проектирования — в основном с использованием собственного программного обеспечения для моделирования Dyson.
Ротор двигателя Дайсона относительно прост — всего два полюса. Это упрощает задачу управления и уменьшает количество обмоток, необходимых для создания схемы импульсов поля, используемой для вращения ротора, здесь со скоростью более 100 000 об/мин. Обычно магниты в реактивном реактивном двигателе довольно слабые. Это не относится к двигателю Dyson, где мы использовали ротор ранней модели в качестве магнита на холодильник.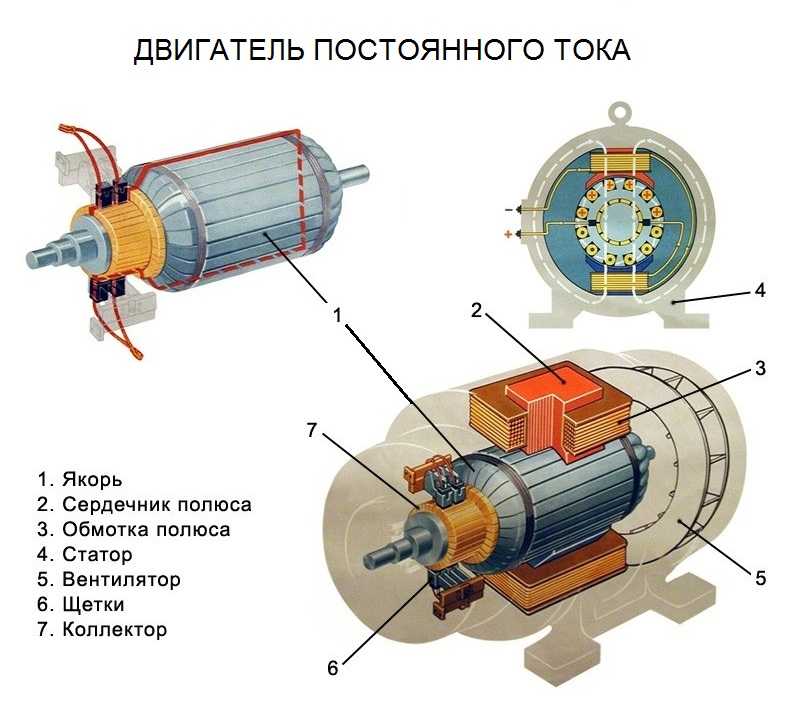
Магнитный ротор одного из двигателей Дайсона. Мы используем его как магнит на холодильник.
Более мощные магниты означают более сложную проблему управления, но также позволяют Dyson делать двигатели намного меньше и легче. Вот тут-то и появляется цифра, поскольку решение этой проблемы означало использование готового микроконтроллера и написания программного обеспечения, а не разработку конкретной схемы управления. Используя простой магнитный датчик на эффекте Холла, чтобы определить, где находится ротор, управляющее программное обеспечение выполняет более 3000 корректировок картины магнитного поля каждую секунду.
Использование программного обеспечения в таком двигателе является ключом к его экономичности. Разработка собственного управляющего оборудования обходится дорого, и если вы пытаетесь разработать двигатель общего назначения, использование программного обеспечения добавляет гибкости, поскольку вы можете изменять код, чтобы учитывать различные нагрузки и модели использования. Это означает, что один и тот же модуль управления будет работать и в пылесосе, и в сушилке для рук, и в вентиляторе. Вы также можете воспользоваться преимуществами современной теории управления, которая сосредоточена на удержании систем в граничных условиях, а не на реализации классической модели управления с замкнутым контуром — которая может легко стать нестабильной.
Это означает, что один и тот же модуль управления будет работать и в пылесосе, и в сушилке для рук, и в вентиляторе. Вы также можете воспользоваться преимуществами современной теории управления, которая сосредоточена на удержании систем в граничных условиях, а не на реализации классической модели управления с замкнутым контуром — которая может легко стать нестабильной.
Если новая конструкция двигателя настолько хороша, что это проявляется в продуктах, которые его используют, таких как вентилятор Hot+Cool. Мы проверяли это с момента резкого похолодания, обрушившегося на Великобританию в феврале и марте этого года, и во время недавней жары. Он использует двигатель, чтобы всасывать воздух через основание и выталкивать его через зазор в 2,5 мм, который проходит вокруг овальной петли вверху. Это означает, что лопасти вентилятора не пачкаются и не дребезжат (или защемляют ваши пальцы или хвост кошки, если они подходят слишком близко).
Звук мотора тише и более регулярен, чем помехи биений, которые вы можете услышать при вращении лопасти вентилятора, и это гораздо более эффективный и непрерывный поток — это означает, что вам редко нужно запускать его на высокой скорости, поддерживая все еще тише. Он достаточно тихий, чтобы оставить его включенным во время конференц-связи, а на низких скоростях он достаточно тихий, чтобы вы могли забыть о включенном вентиляторе — кроме того, что он обеспечивает комфортное тепло или прохладу.
Он достаточно тихий, чтобы оставить его включенным во время конференц-связи, а на низких скоростях он достаточно тихий, чтобы вы могли забыть о включенном вентиляторе — кроме того, что он обеспечивает комфортное тепло или прохладу.
Если вы используете сервер в небольшом офисе, вы можете обойтись без кондиционера, а если вы работаете зимой дома, вы можете запустить Hot + Cool в одной комнате, а не включать отопление во всем доме. весь день.
Такой же новый двигатель используется в последней модели ручного пылесоса Dyson DC44, который сочетает в себе эффективность и продуманный дизайн. На твердых полах сложно собрать мелкую пыль; Когда вы ходите, накапливается статическое электричество, и пыль прилипает к полу. Щетка на DC44 имеет нити из углеродного волокна; они не только достаточно чувствительны к прикосновениям, чтобы прослужить несколько лет, они также снимают статическое электричество, поэтому всасывается больше пыли.
Батареи портативных компьютеров Dyson имеют такие же жизненные циклы, как и в ноутбуках. Мы используем оригинальный портативный компьютер Dyson Root с тех пор, как он появился на рынке в конце 90s, и даже наша оригинальная модель все еще заряжается и держит заряд в течение добрых десяти минут уборки. Сравните это с аккумуляторами для ноутбуков, которые каждый год теряют несколько процентов зарядной емкости, и вы поймете, что Dyson действительно делает хорошие инженерные решения.
Мы используем оригинальный портативный компьютер Dyson Root с тех пор, как он появился на рынке в конце 90s, и даже наша оригинальная модель все еще заряжается и держит заряд в течение добрых десяти минут уборки. Сравните это с аккумуляторами для ноутбуков, которые каждый год теряют несколько процентов зарядной емкости, и вы поймете, что Dyson действительно делает хорошие инженерные решения.
Двигатель Dyson с цифровым управлением — еще один пример важности программного обеспечения и цифровых контроллеров. По мере того, как мы приближаемся к будущему Интернета вещей, именно такие контроллеры будут предоставлять информацию, которая улучшит конструкцию аппаратного и управляющего программного обеспечения. Нетрудно представить себе будущую версию таких двигателей, которые отправляют данные обратно в облачную службу, которая может обнаруживать ранние стадии сбоев или отправлять обратно оптимизированные процедуры управления в зависимости от использования вашего устройства.
Это действительно дивный новый мир, когда традиционная электротехника превращается в программное обеспечение.
Digital Motors — лучшее в отрасли решение для онлайн-продаж.
Прозрачность. Доверять. Время.
Самая мощная платформа онлайн-продаж для автомобилей.
Смотреть видео
Смотреть видео.
Мы ведем розничную торговлю автомобилями в будущее.
Узнайте, как ваша компания может использовать надежную комплексную платформу Digital Motors, чтобы превзойти ожидания клиентов и улучшить процесс продаж.
Для дилеров.
Настраиваемые интернет-магазины с решениями «покупать из дома», расширяющими возможности дилерских центров.
Получите полностью настроенный фирменный интернет-магазин менее чем за 24 часа, который полностью интегрируется в существующую системную среду и традиционные процессы покупки. Клиенты могут завершить покупку автомобиля онлайн или беспрепятственно перейти в дилерский центр на любом этапе процесса покупки. Улучшайте свои показатели CSI, получайте более качественных лидов, сокращайте время закрытия сделок и повышайте показатели закрытия сделок.
Узнать больше
«Digital Motors находится в авангарде предоставления дилерским центрам передовых решений, которые повышают эффективность, прибыль и повышают удовлетворенность клиентов».
Джон ГрейПрезидент CDJRF Orange Coast
Для производителей.
Решения Marketplace для вашей сети дилеров.
Предоставьте своим клиентам современную цифровую торговую площадку для совершения покупок во всех дилерских центрах. Клиенты могут фильтровать по местоположению, модели и спецификациям, чтобы завершить процесс покупки и транзакцию в вашем интернет-магазине или перейти на любом этапе пути клиента к беспрепятственному выполнению заказа в предпочтительном дилерском центре. Создавайте более качественных потенциальных клиентов для своих дилерских центров и повышайте баллы CSI.
Узнать больше
«Это гибкое цифровое решение для розничной торговли позволяет автомобильным дилерам легко расширять свои физические магазины в цифровом мире, повышая эффективность, повышая конверсию и повышая удовлетворенность клиентов».

Хинрих Вёбкен, бывший президент и главный исполнительный директор Volkswagen Group of America
Для кредиторов.
Повышайте лояльность и удержание клиентов для своего портфеля автофинансирования.
Централизуйте свои варианты автокредитования на сложном цифровом рынке, который дает вашим клиентам возможность сравнивать кредитные предложения и заполнять соглашение о финансировании в Интернете, а также беспрепятственно переходить к предпочтительному дилеру для выполнения. Повысьте лояльность клиентов, удержание и возможности перекрестных продаж.
Подробнее
«Платформа позволяет дилерам вести свой бизнес по-своему с помощью полностью настраиваемых цифровых решений, которые подключаются непосредственно к их системам и процессам».
Тимоти Гилл, генеральный директор Advent Resources Inc.
Ваши системы. Ваши процессы.
Мы легко интегрируемся в ваш ландшафт.
Источники кредитования
Предлагайте клиентам реальные финансовые предложения в интернет-магазине Digital Motors на основе ваших критериев андеррайтинга.
CRM Feed
Просматривайте действия клиентов в режиме реального времени через наш портал дилерских продаж Digital Motors, связанный с вашей системой CRM.
Компании DMS
Наши серверные инструменты подключаются непосредственно к существующей системе управления.
Веб-сайт поставщиков
Магазин Digital Motors служит расширением вашего существующего веб-сайта.
Инструменты для обмена
Интегрируйте инструменты для обмена в онлайн-процесс проверки автомобиля.
Провайдеры F&I
Серверная часть Digital Motors синхронизируется с вашими поставщиками F&I для отображения актуальных продуктов.
Inventory Systems
Серверная часть Digital Motors синхронизируется напрямую с вашим поставщиком инвентаря, чтобы наша система постоянно обновлялась.
