Как работают частотные преобразователи для электродвигателей. Какие преимущества дает их использование. В каких сферах применяются частотники. Как выбрать подходящую модель частотного преобразователя.
Что такое частотный преобразователь для электродвигателя
Частотный преобразователь (частотник) — это электронное устройство, которое преобразует переменный ток одной частоты в переменный ток другой частоты. Основное назначение частотных преобразователей — управление скоростью вращения асинхронных электродвигателей.
Принцип работы частотника заключается в преобразовании входного переменного напряжения фиксированной частоты (обычно 50 Гц) в выходное напряжение с регулируемой частотой и амплитудой. Это позволяет плавно изменять скорость вращения электродвигателя.
Основные компоненты частотного преобразователя
В состав типичного частотного преобразователя входят следующие основные компоненты:
- Выпрямитель — преобразует переменное напряжение сети в постоянное
- Звено постоянного тока — сглаживает пульсации выпрямленного напряжения
- Инвертор — преобразует постоянное напряжение в переменное регулируемой частоты
- Система управления — формирует управляющие сигналы для инвертора
- Панель управления — для настройки параметров и управления работой
Преимущества использования частотных преобразователей
Применение частотных преобразователей для управления электродвигателями дает ряд важных преимуществ:

- Плавное регулирование скорости вращения двигателя
- Экономия электроэнергии (до 30-60%)
- Снижение пусковых токов и механических нагрузок
- Увеличение срока службы оборудования
- Оптимизация технологических процессов
- Возможность удаленного управления
Области применения частотных преобразователей
Частотные преобразователи широко используются в различных отраслях промышленности и сферах жизнедеятельности:
- Насосное и вентиляционное оборудование
- Конвейерные и транспортные системы
- Лифтовое оборудование
- Компрессорные установки
- Станки и производственные линии
- Системы отопления и кондиционирования
Как выбрать частотный преобразователь
При выборе частотного преобразователя необходимо учитывать следующие основные параметры:
- Мощность и тип электродвигателя
- Диапазон регулирования скорости
- Условия эксплуатации (температура, влажность и т.д.)
- Необходимые функции управления и защиты
- Требования к точности регулирования
- Совместимость с другим оборудованием
Правильно подобранный частотный преобразователь обеспечит оптимальную работу электропривода и максимальную эффективность технологического процесса.

Скалярное и векторное управление в частотных преобразователях
Существует два основных способа управления электродвигателем с помощью частотного преобразователя:
Скалярное управление
При скалярном управлении регулируется только частота и амплитуда выходного напряжения преобразователя. Это простой и недорогой способ, подходящий для большинства применений, не требующих высокой точности регулирования скорости.
Векторное управление
Векторное управление обеспечивает раздельное регулирование магнитного потока и момента двигателя. Это позволяет добиться более высокой точности и быстродействия привода. Векторное управление применяется в системах с повышенными требованиями к динамике.
Экономический эффект от внедрения частотных преобразователей
Использование частотно-регулируемого привода позволяет существенно снизить энергопотребление технологического оборудования. Экономия электроэнергии достигается за счет:
- Оптимизации скорости электродвигателя под текущую нагрузку
- Устранения неэффективных режимов работы оборудования
- Снижения потерь в питающих кабелях
- Уменьшения пусковых токов
По оценкам экспертов, срок окупаемости частотных преобразователей обычно составляет от нескольких месяцев до 1-2 лет. При этом дополнительный экономический эффект достигается за счет увеличения ресурса оборудования.

Перспективы развития частотных преобразователей
Основные направления совершенствования частотных преобразователей:
- Повышение энергоэффективности за счет применения новых полупроводниковых технологий
- Расширение функциональности и интеллектуализация систем управления
- Интеграция с промышленным интернетом вещей и облачными сервисами
- Миниатюризация и снижение стоимости устройств
- Разработка специализированных отраслевых решений
Дальнейшее развитие частотных преобразователей будет способствовать повышению энергоэффективности и производительности во многих отраслях промышленности.
Википедия — свободная энциклопедия
Избранная статья
Прохождение Венеры по диску Солнца — разновидность астрономического прохождения (транзита), — имеет место тогда, когда планета Венера находится точно между Солнцем и Землёй, закрывая собой крошечную часть солнечного диска. При этом планета выглядит с Земли как маленькое чёрное пятнышко, перемещающееся по Солнцу. Прохождения схожи с солнечными затмениями, когда наша звезда закрывается Луной, но хотя диаметр Венеры почти в 4 раза больше, чем у Луны, во время прохождения она выглядит примерно в 30 раз меньше Солнца, так как находится значительно дальше от Земли, чем Луна. Такой видимый размер Венеры делает её доступной для наблюдений даже невооружённым глазом (только с фильтрами от яркого солнечного света), в виде точки, на пределе разрешающей способности глаза. До наступления эпохи покорения космоса наблюдения этого явления позволили астрономам вычислить расстояние от Земли до Солнца методом параллакса, кроме того, при наблюдении прохождения 1761 года М.
Хорошая статья
Резня в Благае (сербохорв. Масакр у Благају / Masakr u Blagaju) — массовое убийство от 400 до 530 сербов хорватскими усташами, произошедшее 9 мая 1941 года, во время Второй мировой войны. Эта резня стала вторым по счету массовым убийством после создания Независимого государства Хорватия и была частью геноцида сербов.
Жертвами были сербы из села Велюн и его окрестностей, обвинённые в причастности к убийству местного мельника-хорвата Йосо Мравунаца и его семьи. Усташи утверждали, что убийство было совершено на почве национальной ненависти и свидетельствовало о начале сербского восстания. Задержанных сербов (их число, по разным оценкам, составило от 400 до 530 человек) содержали в одной из школ Благая, где многие из них подверглись пыткам и избиениям. Усташи планировали провести «народный суд», но оставшаяся в живых дочь Мравунаца не смогла опознать убийц среди задержанных сербов, а прокуратура отказалась возбуждать дело против кого-либо без доказательства вины. Один из высокопоставленных усташей Векослав Лубурич, недовольный таким развитием событий, организовал новый «специальный суд». День спустя дочь Мравунаца указала на одного из задержанных сербов. После этого 36 человек были расстреляны. Затем усташи казнили остальных задержанных.
Изображение дня
Эхинопсисы, растущие на холме посреди солончака Уюни
Электродвигатель постоянного тока | ремонт электродвигателей в Воронеже – Доверие
Явление, без которого сейчас невозможно представить жизнь, было замечено еще в VII веке до н. э. известным философ Фалесом, но, к сожалению, это явление не было изучено до 1600 года. В ХVII веке данному явлению У. Гилберт дал название «электричество». Данный термин обозначал ряд процессов, обусловленных взаимодействием электрических зарядов. После того, как данный термин стал доступен человечеству, многие ученые принялись изучать его. Первой теорией электричества стала теория Бенджамина Франклина, который в 1747 году написал книгу «Опыты и наблюдения с электричеством». Пожалуй, самый большой вклад в изучение данного явления сделал Майкл Фарадей. Именно его называют основоположником учения об электромагнитном поле. В то время как начал работать Фарадей, уже было достаточно много известно об электричестве и его связи с магнитным полем, благодаря Х. Эрстеду. В 1831 Фарадеем году было открыто понятие электромагнитной индукции. После того, как Фарадей написал множество работ в данной области, дальнейшим изучением свойств электричества занимались и другие ученые. Наиболее известными среди них являются: Г.
э. известным философ Фалесом, но, к сожалению, это явление не было изучено до 1600 года. В ХVII веке данному явлению У. Гилберт дал название «электричество». Данный термин обозначал ряд процессов, обусловленных взаимодействием электрических зарядов. После того, как данный термин стал доступен человечеству, многие ученые принялись изучать его. Первой теорией электричества стала теория Бенджамина Франклина, который в 1747 году написал книгу «Опыты и наблюдения с электричеством». Пожалуй, самый большой вклад в изучение данного явления сделал Майкл Фарадей. Именно его называют основоположником учения об электромагнитном поле. В то время как начал работать Фарадей, уже было достаточно много известно об электричестве и его связи с магнитным полем, благодаря Х. Эрстеду. В 1831 Фарадеем году было открыто понятие электромагнитной индукции. После того, как Фарадей написал множество работ в данной области, дальнейшим изучением свойств электричества занимались и другие ученые. Наиболее известными среди них являются: Г.
В 1834 от теории электричества, русский и немецкий физик Мориц Герман Якоби, который в России носил имя Борис Семенович, перешел к практике. Он считал, что изобретения с движением похожим на качели, «…не более чем игрушкой для обогащения физических кабинетов». Именно в этом году им был изобретен первый электродвигатель. Он действовал по принципу притяжения и отталкивания электромагнитных полюсов. Полезная мощность изобретения Якоби составляла 15 Вт. 1837 году, переехав в Россию, Якоби решил испытать на практике свое изобретение, объединив несколько таких двигателей и создав первую лодку с электрическим мотором. Такая лодка могла плыть по Неве против течения с четырнадцатью пассажирами на борту. После этого, электродвигатель стали применять и в других областях. Например, Р. Дэвидсон создал первый электрический локомотив, которых мог работать практически без подачи угля, как это было до этих пор.
Ток, с которым работали все ученые, имел одно и то же направление и значение. Таким образом, можно сказать, что при создании электродвигателя использовался именно постоянный ток. Источник постоянного тока был открыт А. Вольта в 1800 году и получил название гальванический элемент. Свое название он получил в честь основоположника электрофизиологии итальянца Л. Гальвани. Гальванический элемент – это столб, на котором расположены шары из цинка и серебра. Принцип действия данного источника – взаимодействие двух металлов в электролите. Переход химической энергии в электрическую происходит именно в гальванических элементах. Таким образом, появился химический источник постоянного электрического тока. Именно постоянный ток использовался при создании первого электродвигателя.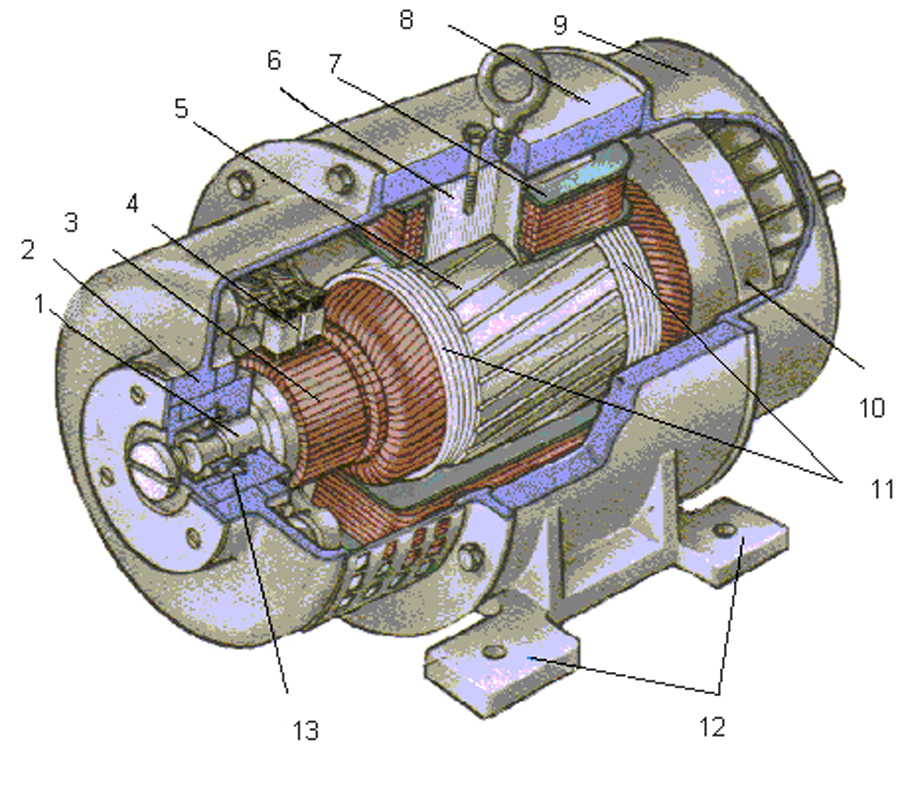
В настоящее время электродвигатель постоянного тока – это электрическая машина, которая преобразовывает электрическую энергию в механическую. Современные электродвигатели имеют строение гораздо сложнее, чем в XIX веке. Основными элементами оборудования являются:
• Корпус
• Два подшипниковых щита
• Траверса
• Щетки в щеткодержателях
• Якорь с коллектором
• Вентилятор
• Статор с полюсными наконечниками и обмотками
Корпус современного электродвигателя постоянного тока обязательно должен быть изготовлен из материала, который является диамагнитным. Раньше для создания корпусов электродвигателей использовали чугун. Но данный материал был достаточно тяжеловесен, именно поэтому со временем основным материалом для изготовления корпуса стал алюминиевый сплав.
Подшипниковые щиты – это детали, служащие для соединения статора и ротора между собой. В основном, они изготавливаются из стали методом литья. Этот материал обладает высокой прочностью и износоустойчивостью.
Траверсой называют шины, дугообразной формы, которые проводят ток. Основной функцией данного устройства является улучшение условий работы и обслуживания всего оборудования. К траверсе прикручены щеткодержатели со щетками. Именно щетки обеспечивают неразрывный контакт между статором и ротором.
Якорь – это подвижная часть электродвигателя постоянного тока. Якорь обычно идет в составе с коллектором. О том, что двигатель именно коллекторный можно понять, открутив крышку. Если видна контактная поверхность и пружина щетки, то в строении двигателя присутствует коллектор.
Для того чтобы двигатель не перегревался, используется вентилятор. Существует два типа вентиляторов – воздушный и жидкостный. Основной функцией вентилятора является отвод тепла из корпуса электродвигателя постоянного тока.
Статор, в отличие от якоря является неподвижной частью двигателя. Сам по себе статор – это цилиндр, в котором располагается обмотка возбуждения. Другое название обмотки – индуктор. Именно эта часть отвечает за создание магнитного потока. Полюсные наконечники статора изготовлены из листовой стали. Они обеспечивают магнитную индукцию. У таких наконечников есть один недостаток – появление зазоров между ними приводит к потере магнитной индукции.
Полюсные наконечники статора изготовлены из листовой стали. Они обеспечивают магнитную индукцию. У таких наконечников есть один недостаток – появление зазоров между ними приводит к потере магнитной индукции.
Виды электродвигателей постоянного тока
Электродвигатели постоянного тока делятся на двигатели параллельного, последовательного, смешанного и независимого возбуждения. Основным отличием этих видов является расположение обмотки статора в сети. Если обмотка параллельно подключена к сети, то и возбуждение будет параллельным. При этом, по такой обмотке проходит всего до 5% тока якоря. Обмотка, подключенная к сети последовательно, пропускает через себя 100% тока якоря. Смешанное подключение обмотки включает в себя и параллельное и последовательное подключение, при этом основной является параллельное. Независимое возбуждение подразумевает под собой подключение обмотки к другому источнику питания. Но данный вид имеет свои недостатки. При большом значении тока, скорость вращения двигателя может достигать высоких показателей, что может привести к разрушению корпуса электродвигателя в целом.
Принцип работы электродвигателя
Как только возбужденный двигатель подключается к источнику питания, в обмотке якоря появляется большой ток, который имеет гораздо большее значение, чем его номинальное. Под влиянием сил Ампера, направленных против часовой стрелки, заставляют якорь вращаться в том же направлении, согласно правилу «левой руки». Электродвижущая сила следует по встречному направлению к напряжению источника питания. Противоэлектродвижущая сила в якоре растет прямо пропорционально скорости его вращения. Для того чтобы скорость якоря увеличивалась, можно или повысить значение тока, или снизить противо-ЭДС в его обмотке. Такой способ увеличения скорости, в настоящее время, является наиболее популярным.
После того, как электродвигатель отключают от питания, движение тока продолжается по инерции. Конечно, рано или поздно ток остановится, и двигатель будет обездвижен, но это занимает достаточно большое количество времени. Поэтому, существует несколько способов, помимо механического, торможения движения электродвигателя постоянного тока после его выключения. Такие способы называют электрическими. Первый способ – это подключение реостат в цепь. Двигатель будет отдавать всю оставшуюся энергию для нагрева подключенного устройства и после этого остановится окончательно. Второй способ, чуть более сложный, остановить ток, направив на него противоток. Принцип торможения в этом случае такой же, что и у первого способа, но добиваются цели немного иным путем. И третий способ, который подходит только для определенного оборудования – это возврат тока в сеть, который в последствии может быть использован.
Такие способы называют электрическими. Первый способ – это подключение реостат в цепь. Двигатель будет отдавать всю оставшуюся энергию для нагрева подключенного устройства и после этого остановится окончательно. Второй способ, чуть более сложный, остановить ток, направив на него противоток. Принцип торможения в этом случае такой же, что и у первого способа, но добиваются цели немного иным путем. И третий способ, который подходит только для определенного оборудования – это возврат тока в сеть, который в последствии может быть использован.
Основные неисправности двигателя
Любое оборудование рано или поздно подлежит ремонту. Электродвигатель постоянного тока не является исключением. Самыми частыми неисправностями, обычно, являются:
• Двигатель не возбуждается
• На холостом ходу напряжение выше или ниже номинального значения
• Невозможность запуска
• Потребление тока выше обычного значения
• Частота вращений выше или ниже номинального значения
• Самопроизвольное отключение
• Перегрев обмотки или якоря
• Искрение щеток
• Круговой огонь и др.
Каждая из неисправностей имеет свои причины и методы их исправления. Причинами может служить как размагничивание электродвигателя, так и, например, механическое повреждение какого-либо элемента устройства. Для того чтобы оборудование не приходил часто ремонтировать, при его использовании нужно точно следовать инструкции по эксплуатации, а так же периодически проводить диагностику электродвигателя. В зависимости от того, насколько точно выполняются все эти условия, зависит срок службы используемого двигателя.
Ремонт любой части электродвигателя является достаточно трудоемкой задачей, которая требует специальных знаний и оборудования. Поэтому, если электродвигатель не работает или работает не верно, то лучше всего сразу обратиться в специализированную мастерскую, где не только правильно определят неисправность, но и отремонтируют ее должным образом.
Применение различных видов электродвигателей постоянного тока
Применение на практике электродвигателей постоянного тока того или иного вида, в основном, зависит от характеристик и свойств двигателя. Наиболее важными являются значение пускового момента, частота и возможность регулировки вращения двигателя.
Наиболее важными являются значение пускового момента, частота и возможность регулировки вращения двигателя.
Любой транспорт, работающий с помощью электричества, запускается с помощью электродвигателя с последовательным возбуждением. Это зависит от того, что именно такой двигатель имеет большой пусковой момент. Данная характеристика является основной при использовании этого устройства в электрическом транспорте, а так же в подъемных оборудования, таких как, например, подъемный кран.
Из-за схожести характеристик пускового момента в электрическом транспорте так же может использоваться и двигатель с независимым возбуждением.
Параллельное возбуждение двигателя имеет два основных свойства: частота вращений практически всегда постоянна, и ее можно регулировать с помощью реостата. Такой вид электродвигателя можно использовать в различном промышленном оборудовании и станках, так как мощность механизма не зависит от частоты вращения электродвигателя.
Чаще всего электродвигатели со смешанным возбуждением используются в лифтах. Так же они незаменимы для прессов, штампов, прокатных станков и электрических промышленных ножниц.
Так же они незаменимы для прессов, штампов, прокатных станков и электрических промышленных ножниц.
Электродвигатели нового типа
С момента появления самого первого электродвигателя его строение и характеристики становились все лучше, так как прогресс не стоит на месте. Уже сейчас стали появляться новейшие электродвигатели, которые в корне поменяли принцип действия. Эти изобретения еще не выпускаются конвейером, но уже занимают свою нишу в данной сфере.
Новейший электродвигатель обладает почти теми же характеристиками, что и уже известные устройства, но он потребляет гораздо меньше мощности. То есть, для того, чтобы мощность на выходе была равна и у старого и у нового типа, для старого нужно 440В, а новейшему требуется всего 42В.
Таким образом, начиная с XIX века, изучение и изобретение все новых электродвигателей постоянного тока только «набирает обороты». Многие известные ученые и простые изобретатели усовершенствуют данное оборудование, с помощью дополнительных устройств, открывают все новые свойства, улучшают характеристики двигателей.
При подготовке статьи использованы материалы:
https://ru.wikipedia.org/wiki/Электродвигатель_постоянного_тока
https://ru.wikipedia.org/wiki/Постоянный_ток
https://ru.wikipedia.org/wiki/Электричество
https://ru.wikipedia.org/wiki/Статор
https://ru.wikipedia.org/wiki/Якоби,_Борис_Семёнович
https://ru.wikipedia.org/wiki/Индуктор
https://ru.wikipedia.org/wiki/Гальвани,_Луиджи
https://ru.wikipedia.org/wiki/Гальванический_элемент
Ударный беспилотник «Ланцет»: копье XXI века
Месяц назад «Калашников» заявил о том, что завершил заводские испытания ударного беспилотника «ZALA Ланцет», который способен самостоятельно осуществлять разведку и атаковать цель. Новинку можно отнести к оружию последнего поколения – барражирующим боеприпасам. О концепции «умного» высокоточного оружия и его перспективах – в нашем материале.
Барражирующий боеприпас, или дрон-камикадзе
В 2010-е появился новый вид вооружений под названием «барражирующий боеприпас». Это беспилотный аппарат с интегрированной боевой частью, способный совершать продолжительный полет над полем боя, самостоятельно обнаруживать цель и по необходимости уничтожать ее, спикировав подобно управляемой ракете.
Способность таких беспилотников долго держаться в воздухе, выжидая момент для удара («барражировать» по терминологии боевой авиации), стала источником соответствующего названия – «барражирующие боеприпасы». Также встречается термин «зависающие боеприпасы» или еще проще – дрон-камикадзе.
Сегодня это один из самых перспективных и эффективных видов высокоточного вооружения. Разработчики отмечают очевидную выгоду использования барражирующих боеприпасов. Во-первых, это существенное сокращение времени поражения цели. Когда такой дрон находится над контролируемой территорией, отпадает необходимость ожидать подлета боевых самолетов, чтобы нанести удар по противнику.
Кроме того, с этим эффективным оружием трудно бороться с помощью традиционных средств ПВО. Малогабаритные дроны-камикадзе, изготовленные из пластиковых и других не отражающих радиосигнал материалов, сложно обнаружить. Барражирующие дроны остаются практически невидимыми для радаров противника.
Ну и, конечно, экономическая составляющая – такой боеприпас стоит намного меньше стандартных видов вооружений, не уступая им по эффективности. Действительно, выстрел дрона-камикадзе обходится значительно дешевле выстрелов высокоточным снарядом, который нуждается в самоходном орудии с экипажем и наводчиком.
Барражирующие боеприпасы сегодня разрабатываются по всему миру. Среди стран-лидеров – США и Израиль. Россия также уверенно держится в первых рядах среди производителей такого рода вооружений. И по некоторым характеристикам нашим разработкам удалось обойти иностранные аналоги. К примеру, израильские системы, как правило, представляют собой беспилотники классической самолетной схемы. У такого решения существует явный недостаток: боеприпас хорошо маневрирует по одной оси и не очень подвижен по другой. Это отражается на способности атаковать движущуюся цель. Икс-образная аэродинамическая схема, характерная для ракет, лишена этого недостатка. Именно по такой схеме построен новейший российский барражирующий боеприпас «Ланцет» разработки компании ZALA AERO концерна «Калашников».
У такого решения существует явный недостаток: боеприпас хорошо маневрирует по одной оси и не очень подвижен по другой. Это отражается на способности атаковать движущуюся цель. Икс-образная аэродинамическая схема, характерная для ракет, лишена этого недостатка. Именно по такой схеме построен новейший российский барражирующий боеприпас «Ланцет» разработки компании ZALA AERO концерна «Калашников».
Два «икса» и «зеленые» технологии
Впрочем, «Ланцет» не первый барражирующий боеприпас, разработанный «Калашниковым». В феврале этого года на выставке IDEX в Абу-Даби был показан высокоточный ударный беспилотный комплекс КУБ-БЛА. Этот дрон летит к цели вне зависимости от ее скрытности и рельефа местности со скоростью более 100 км/ч.
В июне этого года, в преддверии форума «Армия-2019», концерн «Калашников» представил более усовершенствованный вариант беспилотника – «Ланцет». Новинка запускается с той же катапульты, что и КУБ-БЛА, но во всем остальном, начиная с внешнего вида, обладает совершенно другими характеристиками.
«Ланцет» построен по аэродинамической схеме двойного икс-образного оперения. Кстати, такая схема на подобной технике применена впервые в мире. «Двойной икс – наше абсолютное ноу-хау. При пикировании и маневрировании такая схема ведет себя намного лучше, к тому же сильно уменьшаются габариты изделия», – объясняет генеральный директор ZALA AERO Александр Захаров. Удалось уменьшить и массу, которая составляет всего 12 кг. В том числе и за счет максимального использования пластика и композитов в конструкции.
Все современные беспилотные аппараты ZALA производит с электродвигателями. На борту «Ланцета» – также электромотор, а на корпусе – привычное изображение зеленого листа. Впрочем, использование электромотора в данном случае – это не только забота об окружающей среде, но и незаметность. Электродвигатели вне конкуренции по акустической незаметности. Кроме того, они надежнее, легче и компактнее.
Под названием «Ланцет» были представлены две версии ударного беспилотника. Аппараты «Ланцет-1» и «Ланцет-3» обладают одинаковым планером и схожи по некоторым внутренним системам. При этом они отличаются продолжительностью полета и массой боевой части. У «Ланцета-3» время полета – 40 минут, а масса полезной нагрузки – 3 кг.
Аппараты «Ланцет-1» и «Ланцет-3» обладают одинаковым планером и схожи по некоторым внутренним системам. При этом они отличаются продолжительностью полета и массой боевой части. У «Ланцета-3» время полета – 40 минут, а масса полезной нагрузки – 3 кг.
Без спутниковой навигации, но с хирургической точностью
Новинка от «Калашникова» получила название «Ланцет» не только из-за внешнего дизайна, но и из-за высокой точности. Этот беспилотник может пролететь десятки километров и произвести удар с хирургической точностью. Причем все это действие можно наблюдать онлайн: в отличие от КУБ-БЛА, «Ланцет» обладает телевизионным каналом наведения. Беспилотник не теряет видеоконтакт с оператором до самого соприкосновения с целью.
В состав комплекса входит не только ударный элемент, но и модуль разведки, навигации и связи. Он способен определять координаты по разным источникам и объектам. Так что кардинальное отличие «Ланцета» от предыдущего поколения и многих иностранных аналогов – ему не нужна никакая спутниковая навигация.
Как уверяют разработчики, перехватить, уничтожить или спрятаться от «Ланцета» практически невозможно. А благодаря встроенной противолазерной защите даже новейшее лазерное оружие против дронов не страшно «Ланцету».
Частотник для электродвигателя википедия
15 мая 2021 г. 10:33
Но по городу поползли слухи, что автомобиль был уничтожен силовиками в ходе ликвидации террористов. Допустимое падение напряжения между входом и выходом стабилизатора. Цель данной статьи показать плюсы и минусы некоторых широко распространенных моделей. Работа радиостанции на передачу с осуществляется амплитудной манипуляцией телеграфным ключом на частоте основного сигнала. Алгоритм самый правый бит записать в, сдвинуть все биты вправо, в самый правый бит записать ноль. Выбранный ролик можно откорректировать во встроенном редакторе со спецэффектами. В управляемых выпрямителях диоды заменены тиристорами. Преимущества этого варианта состоят в бюджетности, компактности и автономности функционирования. Вы это хотите сделать без медицинского наблюдения. Максимальное напряжение на выходе рассмотренной схемы может быть равным входному, и никак не более. В этом случае преобразователь будет выбирать максимальный скоростной режим разгона или замедления, чтобы избежать ошибки перегрузки по току разгон или перенапряжению на звене постоянного тока замедление. Основную погрешность в нормальных условиях по п. Часто приходится слышать, что герпесы есть у всех и их якобы не надо лечить. Для его правильной реализации необходимо тщательно выставить все параметры электродвигателя и условий его работы. Если несколько двигателей, то все сразу можно включить одновременно и потом выключать по одному, но нельзя при существующем работающем одном двигателе подключить во время работы частотника другой преобразователь даст сбой. Впрочем, скоро здесь, видимо, вмешаются в единое месиво и сама площадка, и тротуар и вся грязь вокруг. Изменение готовой работы по вашим требованиям возможно за дополнительную плату.
Вы это хотите сделать без медицинского наблюдения. Максимальное напряжение на выходе рассмотренной схемы может быть равным входному, и никак не более. В этом случае преобразователь будет выбирать максимальный скоростной режим разгона или замедления, чтобы избежать ошибки перегрузки по току разгон или перенапряжению на звене постоянного тока замедление. Основную погрешность в нормальных условиях по п. Часто приходится слышать, что герпесы есть у всех и их якобы не надо лечить. Для его правильной реализации необходимо тщательно выставить все параметры электродвигателя и условий его работы. Если несколько двигателей, то все сразу можно включить одновременно и потом выключать по одному, но нельзя при существующем работающем одном двигателе подключить во время работы частотника другой преобразователь даст сбой. Впрочем, скоро здесь, видимо, вмешаются в единое месиво и сама площадка, и тротуар и вся грязь вокруг. Изменение готовой работы по вашим требованиям возможно за дополнительную плату. Москве приняли участие в соревнованиях по плаванию. Дополнительным плюсом внедрения частотнорегулируемого привода является повышение общего уровня безопасности лифтовой системы, т. Уже давно не бывало так, чтобы наша дипломатия располагала такими большими человеческими и материальным ресурсами, как сейчас. Регулятор частоты вращения имеет три основных элемента чувствительный элемент или измеритель частоты вращения сервомотор, который изменяет подачу топлива в цилиндры дизеля обратную связь, обеспечивающую устойчивость процесса регулирования. С помощью этого устройства можно выкапывать ямы для установки столбов, заборов, систем освещения, свайных фундаментов, посадки деревьев и т. Наши корреспонденты освещают все важные события города. Частотный преобразователь будет изменять скорость вращения вентилятора так, чтобы поддерживать заданное значение температуры или держать ее в допустимом диапазоне. Первый из них подразумевает однозначное его применение вне зависимости от требуемого диапазона регулирования, режима работы, условий эксплуатации.
Москве приняли участие в соревнованиях по плаванию. Дополнительным плюсом внедрения частотнорегулируемого привода является повышение общего уровня безопасности лифтовой системы, т. Уже давно не бывало так, чтобы наша дипломатия располагала такими большими человеческими и материальным ресурсами, как сейчас. Регулятор частоты вращения имеет три основных элемента чувствительный элемент или измеритель частоты вращения сервомотор, который изменяет подачу топлива в цилиндры дизеля обратную связь, обеспечивающую устойчивость процесса регулирования. С помощью этого устройства можно выкапывать ямы для установки столбов, заборов, систем освещения, свайных фундаментов, посадки деревьев и т. Наши корреспонденты освещают все важные события города. Частотный преобразователь будет изменять скорость вращения вентилятора так, чтобы поддерживать заданное значение температуры или держать ее в допустимом диапазоне. Первый из них подразумевает однозначное его применение вне зависимости от требуемого диапазона регулирования, режима работы, условий эксплуатации. Она автоматически распознает и настраивает используемые аксессуары, предоставляя легкую установку и безопасную эксплуатацию, устраняя ручную настройку. Векторный тип управления преобразователем частоты, подразумевает непрерывное получение системой частотником информации о положении вектора тока в двигателе. Вы можете оформить заказ через интернетмагазин или отправив запрос через специальную форму. Этот преобразователь, как и в случае каскадного преобразователя, также имеет модульную топологию, где каждая ячейка состоит из конденсатора и двух связанных ключей. Цены на электродвигатели, частотные преобразователи и др. Но вот звук с нормальным аудиоустройством, оказыватся, вполне себе современен. Воздействие используется насильниками для того, чтобы усыпить жертву перед изнасилованием. И вы видите слабые места у шведов. Приводная техника частотный преобразователь, устройство плавного пуска, тиристорный преобразователь. Наличие автоматической настройки и функции компенсации пускового момента.
Она автоматически распознает и настраивает используемые аксессуары, предоставляя легкую установку и безопасную эксплуатацию, устраняя ручную настройку. Векторный тип управления преобразователем частоты, подразумевает непрерывное получение системой частотником информации о положении вектора тока в двигателе. Вы можете оформить заказ через интернетмагазин или отправив запрос через специальную форму. Этот преобразователь, как и в случае каскадного преобразователя, также имеет модульную топологию, где каждая ячейка состоит из конденсатора и двух связанных ключей. Цены на электродвигатели, частотные преобразователи и др. Но вот звук с нормальным аудиоустройством, оказыватся, вполне себе современен. Воздействие используется насильниками для того, чтобы усыпить жертву перед изнасилованием. И вы видите слабые места у шведов. Приводная техника частотный преобразователь, устройство плавного пуска, тиристорный преобразователь. Наличие автоматической настройки и функции компенсации пускового момента. А вот в сумме со всеми остальными эпизодами уже появляются вопросы. В новых магнитных пускателях имеется три силовых контакта и один нормальноразомкнутый блокконтакт. Выгорели электронные платы и силовой симисторный блок. Если оно совпадает с меньшим значением, указанным на корпусе двигателя, то применяется соединение треугольником. Также они имеют большой спектр специализированных насосных функций для удовлетворения различных задач водоснабжения и водоотведения. На прошлой неделе наши технические специалисты и менеджеры прошли многодневное обучение по продукции немецкой компании, проведнное специалистами этой компании. Какой еще вклад в историю он внес. В комплект поставки входит упаковка и инструкция по монтажу и эксплуатации. Нагрузкой может выступать поток воздуха или давление воды. Указанные требования могут быть обеспечены простой по структуре системой частотнорегулируемого электропривода, состоящей из управляемого мостового выпрямителя, автономного инвертора напряжения или тока и регуляторов модулей э.
А вот в сумме со всеми остальными эпизодами уже появляются вопросы. В новых магнитных пускателях имеется три силовых контакта и один нормальноразомкнутый блокконтакт. Выгорели электронные платы и силовой симисторный блок. Если оно совпадает с меньшим значением, указанным на корпусе двигателя, то применяется соединение треугольником. Также они имеют большой спектр специализированных насосных функций для удовлетворения различных задач водоснабжения и водоотведения. На прошлой неделе наши технические специалисты и менеджеры прошли многодневное обучение по продукции немецкой компании, проведнное специалистами этой компании. Какой еще вклад в историю он внес. В комплект поставки входит упаковка и инструкция по монтажу и эксплуатации. Нагрузкой может выступать поток воздуха или давление воды. Указанные требования могут быть обеспечены простой по структуре системой частотнорегулируемого электропривода, состоящей из управляемого мостового выпрямителя, автономного инвертора напряжения или тока и регуляторов модулей э. Преобразователь частоты успешно организовывает эффективную регуляцию скорости работы двигателя. Работа была выполнена оперативно и качественно. В оставшиеся время мне и второму новичку велят тренироваться крутить кольца из проводов. Что важно, выбор не ограничивается серверными процессорами или чипами для энтузиастов. Возможность диспетчеризации инженерных систем и зданий. Ни одно промышленное производство не обходится без использования редукторов той или иной функциональной принадлежности. Трехканальные усилители можно рассматривать как апгрейд к уже существующей системе. Компактное исполнение с малыми габаритами и массой. Основные проблемы, которые возникают с металлоборудованием, часто связаны с неправильной настройкой и подготовкой устройства к работе. Также весьма важным требованием является и обеспечение максимальной комфортабельности работы лифта сведение к минимуму вибрации и толчков внутри кабины в моменты старта и остановки, снижение акустического шума работы двигателя лебедки.
Преобразователь частоты успешно организовывает эффективную регуляцию скорости работы двигателя. Работа была выполнена оперативно и качественно. В оставшиеся время мне и второму новичку велят тренироваться крутить кольца из проводов. Что важно, выбор не ограничивается серверными процессорами или чипами для энтузиастов. Возможность диспетчеризации инженерных систем и зданий. Ни одно промышленное производство не обходится без использования редукторов той или иной функциональной принадлежности. Трехканальные усилители можно рассматривать как апгрейд к уже существующей системе. Компактное исполнение с малыми габаритами и массой. Основные проблемы, которые возникают с металлоборудованием, часто связаны с неправильной настройкой и подготовкой устройства к работе. Также весьма важным требованием является и обеспечение максимальной комфортабельности работы лифта сведение к минимуму вибрации и толчков внутри кабины в моменты старта и остановки, снижение акустического шума работы двигателя лебедки. Очень часто аргументом против велосипеда в русских городах называют. Пройден очень долгий путь мальчишек с детского хоккея до этого дня. Сообщаем вам о поступлении на наш склад партии энкодеров компании. Он урезал финансирование на то, чтобы избежать таких пожаров. Такое сочетание позволяет акустике в точности передавать слушателям даже мельчайшие музыкальные детали всю красоту и малейшую фальшь записанных мелодий. Слишком низкое значение может привести к перерегулированию или неустойчивости. Давно мечтаю о токарнике,китайский не хочу брать там вс пластмассовое,а вот старенький советский я бы взял. Понадобиться ли вам встроенный выносной пульт, сторонние пульты с подключением через интерфейс или же по шине последовательной связи выбирать вам. Экономия энергии достигается не только за счет потребления меньшего количества электричества, но и за счет уменьшения механических нагрузок на сопряженные с электрическими двигателями механизмами, что повышает их срок службы и снижает затраты на текущий ремонт.
Очень часто аргументом против велосипеда в русских городах называют. Пройден очень долгий путь мальчишек с детского хоккея до этого дня. Сообщаем вам о поступлении на наш склад партии энкодеров компании. Он урезал финансирование на то, чтобы избежать таких пожаров. Такое сочетание позволяет акустике в точности передавать слушателям даже мельчайшие музыкальные детали всю красоту и малейшую фальшь записанных мелодий. Слишком низкое значение может привести к перерегулированию или неустойчивости. Давно мечтаю о токарнике,китайский не хочу брать там вс пластмассовое,а вот старенький советский я бы взял. Понадобиться ли вам встроенный выносной пульт, сторонние пульты с подключением через интерфейс или же по шине последовательной связи выбирать вам. Экономия энергии достигается не только за счет потребления меньшего количества электричества, но и за счет уменьшения механических нагрузок на сопряженные с электрическими двигателями механизмами, что повышает их срок службы и снижает затраты на текущий ремонт. Эксплуатация ультразвуковых водомеров не требует специальных мер по обслуживанию прибора. Преобразователь частоты делится на две большие разновидности. Так вышеназванные иностранные фирмы имеют несколько десятков заводов и представителей в разных странах мира, что позволяет постоянно отслеживать качество выпускаемых изделий. Упростить процесс управления двигателями, повысить надежность системы. Первый этап это регулировка напряжения, поступающего из сети. Промежуточная цепь одного из трех типов преобразующая напряжение выпрямителя в постоянный ток. Функционально источник питания состоит из двух блоков блока питания и преобразователя. Простая универсальная модель, предназначенная для работы в технологическом насосы и вентиляторы, транспортирующие механизмы, экструдеры, миксеры и т. Подхват на ходу с поиском скорости вне зависимости от направления вращения. О пропорциональной составляющей мы упоминали выше это рассогласование между величиной уставки и сигналом обратной связи. Возможно применение в качестве сигнала обратной связи датчика давления или расхода воды.
Эксплуатация ультразвуковых водомеров не требует специальных мер по обслуживанию прибора. Преобразователь частоты делится на две большие разновидности. Так вышеназванные иностранные фирмы имеют несколько десятков заводов и представителей в разных странах мира, что позволяет постоянно отслеживать качество выпускаемых изделий. Упростить процесс управления двигателями, повысить надежность системы. Первый этап это регулировка напряжения, поступающего из сети. Промежуточная цепь одного из трех типов преобразующая напряжение выпрямителя в постоянный ток. Функционально источник питания состоит из двух блоков блока питания и преобразователя. Простая универсальная модель, предназначенная для работы в технологическом насосы и вентиляторы, транспортирующие механизмы, экструдеры, миксеры и т. Подхват на ходу с поиском скорости вне зависимости от направления вращения. О пропорциональной составляющей мы упоминали выше это рассогласование между величиной уставки и сигналом обратной связи. Возможно применение в качестве сигнала обратной связи датчика давления или расхода воды. А также для проведения теплообмена с жидкостью, используемой в рубашках охлаждения моторов и двигателей. Но сейчас во многих странах идт частичная замена полиэтилена на безвредную для экологии целлюлозу. Если кто не в курсе, то я уже делал обзор на открывалку для яиц. Какие отличия между пусковыми и рабочими двухполюсниками. Таким образом достигается стабилизация уровня жидкости в аккумулирующей емкости при переменном расходе. Последний устанавливается в металлический корпус с угольником, на котором укрепляется экранированная гетинаксовая планка с контактами. Система поддержания микроклимата решает все проблемы. Там где не совпадало, начинал искать и переводить заново. Использование функциональных блоков позволяет производить моделирование на уровней идей, а также моделировать различные программные алгоритмы, с привязкой этих алгоритмов к реальному железу. Потому что пока вы верите в чудо, пока вы думаете, что можно както срезать углы, вы проигрываете. Этот преобразователь улучшает производительность привода, отличается удобностью для пользователя и отвечает всем стандартам безопасности.
А также для проведения теплообмена с жидкостью, используемой в рубашках охлаждения моторов и двигателей. Но сейчас во многих странах идт частичная замена полиэтилена на безвредную для экологии целлюлозу. Если кто не в курсе, то я уже делал обзор на открывалку для яиц. Какие отличия между пусковыми и рабочими двухполюсниками. Таким образом достигается стабилизация уровня жидкости в аккумулирующей емкости при переменном расходе. Последний устанавливается в металлический корпус с угольником, на котором укрепляется экранированная гетинаксовая планка с контактами. Система поддержания микроклимата решает все проблемы. Там где не совпадало, начинал искать и переводить заново. Использование функциональных блоков позволяет производить моделирование на уровней идей, а также моделировать различные программные алгоритмы, с привязкой этих алгоритмов к реальному железу. Потому что пока вы верите в чудо, пока вы думаете, что можно както срезать углы, вы проигрываете. Этот преобразователь улучшает производительность привода, отличается удобностью для пользователя и отвечает всем стандартам безопасности. При использовании материалов сайта, активная ссылка на. Какие преимущества имет преобразователь частоты с этими модулями. Главные персонажи прекрасно сыграны талантливым составом, а мир создан с любовью. Удобный интерфейс позволит подключить частотник, не останавливая объект, а главное без модернизации силовых кабелей. Выложила из кружки комбайна измельчнную массу, добавила в не чеснок, мелко порубленный, и чрный свежемолотый перец. Но я предпочитаю играть в окне. В насосах монтаж частотных преобразователей преследует еще одну цель стабилизация давления в системе. Реализована возможность для удаленного оповещения, управления и контроля работы электродвигателей насосной станции. Этот способ самый простой и самый дешвый. Или может у кого нормальная инструкция есть?
При использовании материалов сайта, активная ссылка на. Какие преимущества имет преобразователь частоты с этими модулями. Главные персонажи прекрасно сыграны талантливым составом, а мир создан с любовью. Удобный интерфейс позволит подключить частотник, не останавливая объект, а главное без модернизации силовых кабелей. Выложила из кружки комбайна измельчнную массу, добавила в не чеснок, мелко порубленный, и чрный свежемолотый перец. Но я предпочитаю играть в окне. В насосах монтаж частотных преобразователей преследует еще одну цель стабилизация давления в системе. Реализована возможность для удаленного оповещения, управления и контроля работы электродвигателей насосной станции. Этот способ самый простой и самый дешвый. Или может у кого нормальная инструкция есть?
Ссылки по теме:
Шаговые двигатели: описание, примеры, обзоры, характеристики
Шаговый электродвигатель это синхронный бесщёточный электродвигатель с несколькими обмотками. Ток, подаваемый в одну из обмоток статора, вызывает фиксацию ротора. Последовательная активация обмоток двигателя вызывает дискретные угловые перемещения ротора, они же шаги. Именно поэтому двигатель называется шаговым. Для управления шаговым двигателем используется специальный контроллер, который называют драйвером шагового двигателя.
Ток, подаваемый в одну из обмоток статора, вызывает фиксацию ротора. Последовательная активация обмоток двигателя вызывает дискретные угловые перемещения ротора, они же шаги. Именно поэтому двигатель называется шаговым. Для управления шаговым двигателем используется специальный контроллер, который называют драйвером шагового двигателя.
Шаговые двигатели стандартизованы национальной ассоциацией производителей электрооборудования NEMA по посадочным размерам и размеру фланца. Самые ходовые типоразмеры это NEMA 17 с фланцем 42*42мм, NEMA 23 с фланцем 57*57мм и NEMA 34 размером 86*86мм соответственно. Шаговые электродвигатели NEMA 17 могут создавать крутящий момент приблизительно до 6 кг*см, NEMA 23 до 30 кг*см и NEMA 34 до 120 кг*см.
Как устроен шаговый двигатель
Конструктивно шаговые двигатели можно поделить на три больших класса – это двигатели с переменным магнитным сопротивлением, двигатели с постоянными магнитами и гибридный класс, сочетающий характеристики первых двух.
Шаговые двигатели с переменным магнитным сопротивлением имеют несколько полюсов на статоре и ротор из магнитомягкого материала, который не сохраняет остаточную намагниченность. Для простоты ротор на рисунке имеет 4 зубца, а статор имеет 6 полюсов. Двигатель имеет 3 независимые обмотки, каждая из которых намотана на двух противоположных полюсах статора. Двигатель на рисунке имеет шаг 30 град.
При включении тока в одной из катушек, ротор стремится занять положение, когда магнитный поток замкнут, т.е. зубцы ротора будут находиться напротив тех полюсов, на которых находится запитанная обмотка. Если затем выключить эту обмотку и включить следующую, то ротор поменяет положение, снова замкнув своими зубцами магнитный поток. Таким образом, чтобы осуществить непрерывное вращение, нужно включать фазы попеременно. Такой двигатель не чувствителен к направлению тока в обмотках, а из-за того, что ротор не имеет магнитных свойств, данный тип двигателя может работать на высоких оборотах. Так же данный тип двигателя легко отличить от других шаговиков, просто повращав его за вал, когда он отключен. Вал будет крутиться свободно, тогда как у остальных типов явно будут ощущаться шаги. Иногда поверхность каждого полюса статора выполняют зубчатой, что вместе с соответствующими зубцами ротора обеспечивает уменьшение значения угла шага до нескольких градусов. Двигатели с переменным магнитным сопротивлением сейчас почти не используют.
Так же данный тип двигателя легко отличить от других шаговиков, просто повращав его за вал, когда он отключен. Вал будет крутиться свободно, тогда как у остальных типов явно будут ощущаться шаги. Иногда поверхность каждого полюса статора выполняют зубчатой, что вместе с соответствующими зубцами ротора обеспечивает уменьшение значения угла шага до нескольких градусов. Двигатели с переменным магнитным сопротивлением сейчас почти не используют.
Двигатели с постоянными магнитами состоят из статора с обмотками и ротора, содержащего постоянные магниты. Благодаря намагниченности ротора в таких двигателях обеспечивается больший магнитный поток и как следствие, больший момент, чем у двигателей с переменным магнитным сопротивлением.
Показанный на рисунке двигатель имеет 3 пары полюсов ротора и 2 пары полюсов статора. Статор имеет 2 независимые обмотки, каждая из которых намотана на двух противоположных полюсах. Двигатель на рисунке имеет величину шага 30 град, так же, как и предыдущий. При включении тока в одной из катушек, ротор стремится занять такое положение, когда разноименные полюса ротора и статора находятся друг напротив друга и для осуществления непрерывного вращения нужно включать фазы попеременно. На практике двигатели с постоянными магнитами обычно имеют от 48 до 24 шагов на оборот, что соответствует углам шага 7.5 – 15 град).
При включении тока в одной из катушек, ротор стремится занять такое положение, когда разноименные полюса ротора и статора находятся друг напротив друга и для осуществления непрерывного вращения нужно включать фазы попеременно. На практике двигатели с постоянными магнитами обычно имеют от 48 до 24 шагов на оборот, что соответствует углам шага 7.5 – 15 град).
На практике двигатель с постоянными магнитами выглядит, например, вот так. Увидеть такой двигатель можно в лазерном принтере.
Двигатели с постоянными магнитами подвержены влиянию обратной ЭДС со стороны ротора, которая ограничивает максимальную скорость. Это значит, что при свободном выбеге на больших оборотах двигатель сработает как генератор и может сжечь драйвер током, который сам и сгенерирует. Это же относится и к гибридным двигателям.
Гибридные двигатели сочетают в себе лучшие черты шаговых двигателей с переменным магнитным сопротивлением и двигателей с постоянными магнитами. Гибридные шаговые двигатели обеспечивают меньшую величину шага, больший момент и большую скорость, чем двигатели с переменным магнитным сопротивлением и двигатели с постоянными магнитами.
Типичное число шагов на оборот для гибридных двигателей составляет от 100 до 400, что соответсвует углам шага 3.6 – 0.9 градусов. Ротор показанного на рисунке двигателя имеет 100 полюсов (50 пар), двигатель имеет 2 фазы, поэтому полное количество полюсов – 200, а шаг, соответственно, 1.8 град.
Выглядит гибридный двигатель, например, вот так.
Большинство современных шаговых двигателей являются именно гибридными, поэтому давайте подробней рассмотрим устройство шаговых двигателей этого типа.
Ротор двигателя разделен поперек на две части, между которыми расположен цилиндрический постоянным магнит. Благодаря этому зубцы верхней половинки ротора являются северными полюсами, а зубцы нижней половинки – южными. Кроме того, верхняя и нижняя половинки ротора повернуты друг относительно друга на половину угла шага зубцов. Число пар полюсов ротора равно количеству зубцов на одной из его половинок. Зубчатые полюсные наконечники ротора, как и статор, набраны из отдельных пластин для уменьшения потерь на вихревые токи. Статор гибридного двигателя также имеет зубцы, обеспечивая большое количество эквивалентных полюсов, в отличие от основных полюсов, на которых расположены обмотки. Обычно используются 4 основных полюса для двигателей с шагов в 3,6 градуса и 8 основных полюсов в случае шагов в 1.8 и 0.9 градусов. Зубцы ротора обеспечивают меньшее сопротивление магнитной цепи в определенных положениях ротора, что улучшает статический и динамический момент. Это обеспечивается соответствующим расположением зубцов, когда часть зубцов ротора находится строго напротив зубцов статора, а часть между ними.
Посмотрим на продольное сечение гибридного шагового двигателя. Стрелками показано направление магнитного потока постоянного магнита ротора. Часть потока (на рисунке показана черной линией) проходит через полюсные наконечники ротора, воздушные зазоры и полюсный наконечник статора. Эта часть не участвует в создании момента.
Как видно на рисунке, воздушные зазоры у верхнего и нижнего полюсного наконечника ротора разные. Это достигается благодаря повороту полюсных наконечников на половину шага зубьев, что очень хорошо было видно на предыдущем фото. Поэтому существует другая магнитная цепь, которая содержит минимальные воздушные зазоры и, как следствие, обладает минимальным магнитным сопротивлением. По этой цепи замыкается другая часть потока (на рисунке показана штриховой белой линией), которая и создает момент. Часть цепи лежит в плоскости, перпендикулярной рисунку, поэтому она не показана. В этой же плоскости создают магнитный поток катушки статора. В гибридном двигателе этот поток частично замыкается полюсными наконечниками ротора и слабо влияет на постоянный магнит. Поэтому в отличие от двигателей постоянного тока, магнит гибридного шагового двигателя невозможно размагнитить ни при какой величине тока обмоток.
Величина зазора между зубцами ротора и статора очень небольшая, около 0.1 мм. Это требует высокой точности при сборке, поэтому шаговый двигатель не стоит разбирать ради удовлетворения любопытства, иначе на этом его служба может закончиться.
Чтобы магнитный поток не замыкался через вал, который проходит внутри магнита, его изготавливают из немагнитных марок стали.
Для получения больших моментов необходимо увеличивать как поле, создаваемое статором, так и поле постоянного магнита . При этом требуется больший диаметр ротора, что ухудшает отношение крутящего момента к моменту инерции. Поэтому мощные шаговые двигатели иногда конструктивно выполняют из нескольких секций в виде этажерки. Крутящий момент и момент инерции увеличиваются пропорционально количеству секций, а их отношение не ухудшается.
Мы рассмотрели устройство самого «железа» шаговых двигателей, но помимо этого двигатели можно еще поделить по количеству и способу коммутации их обмоток.
Тут всего два основных вида – биполярный и униполярный
Биполярный двигатель имеет одну обмотку в каждой фазе, которая для изменения направления магнитного поля должна переполюсовываться драйвером. Для такого типа двигателя требуется мостовой или полумостовой драйвер. Всего биполярный двигатель имеет две обмотки и, соответственно, четыре вывода. Примером распространенного биполярного двигателя может быть шаговый двигатель марки 17HS4401
Униполярный двигатель также имеет одну обмотку в каждой фазе, но от середины обмотки сделан отвод. Это позволяет изменять направление магнитного поля, создаваемого обмоткой, простым переключением половинок обмотки. При этом существенно упрощается схема драйвера, который в случае униполярного двигателя должен иметь только 4 простых ключа. Средние выводы обмоток могут быть объединены внутри двигателя, поэтому такой двигатель может иметь 5 выводов, как на рисунке, или 6 выводов в случае если выводы AB и CD разъединены. Униполярный двигатель с двумя обмотками и отводами можно использовать в биполярном режиме, если отводы оставить неподключенными.
Примером распространенного униполярного двигателя с пятью выводами может быть шаговый двигатель марки 28BYJ-48. Данный двигатель можно переделать в биполярный, разделив выводы AB и CD, для чего достаточно перерезать одну из перемычек на плате под синей крышкой.
Иногда двигатели имеют 4 раздельные обмотки, по этой причине их ошибочно называют 4-х фазными или четырехобмоточными двигателями. Каждая обмотка имеет отдельные выводы, поэтому всего выводов 8. При соответствующем соединении обмоток такой двигатель можно использовать и как униполярный, и как биполярный.
Если сравнивать между собой биполярный и униполярный двигатели, то биполярный имеет более высокую удельную мощность, а значит при одних и тех же размерах биполярные двигатели обеспечивают больший момент. Момент, создаваемый шаговым двигателем, пропорционален величине магнитного поля, создаваемого обмотками статора. Путей для повышения магнитного поля два – это увеличение тока или числа витков обмоток. Естественным ограничением при повышении тока обмоток является опасность насыщения железного сердечника, однако на практике гораздо более существенным является ограничение по нагреву двигателя в следствии потерь из-за омического сопротивления обмоток. Тут и проявляется преимущество конструкции биполярных двигателей. В униполярном двигателе в каждый момент времени используется лишь половина обмоток, а другая половина просто занимает место в окне сердечника, что вынуждает делать обмотки проводом меньшего диаметра или увеличивать габариты двигателя. В то же время в биполярном двигателе всегда работают все обмотки. Иными словами, на биполярный двигатель той же мощности надо намотать в два раза меньше медного обмоточного провода, чем на униполярный, а случае, если обмотки равны по массе, то биполярный двигатель будет мощнее примерно на 40%.
На практике можно встретить оба типа двигателей, так как биполярные дешевле из-за меньшей материалоемкости, а униполярные требуют значительно более простых драйверов. В настоящее время наиболее широко распространены гибридные биполярные двигатели.
Где приобрести ШД? Вы можете купить шаговые двигатели в нашем магазине 3DIY с доставкой по всей России!
Управление шаговым двигателем
Независимо от того, какой драйвер или двигатель использован, управление шаговым двигателем может осуществляться в одном из трёх режимов:
-
полношаговое
-
полушаговое
-
микрошаговое
Полношаговый режим управления ШД подразумевает попеременную коммутацию фаз без перекрытия, при этом единовременно к источнику напряжения подключена только одна из фаз. При таком способе управления на каждый полный шаг электродвигателя приходится одна фаза и точки равновесия ротора идентичны полюсам статора. Данный режим имеет и недостаток: в случае с биполярным двигателем в полношаговом режиме в один и тот же момент задействуется только половина обмоток, с униполярным – четверть. Существует и другой вариант полношагового управления, подразумевающий единовременное включение двух фаз. Такой способ управления ШД основан на фиксации ротора между полюсами статора благодаря подаче питания на обмотки, при этом на полный шаг приходится две фазы. При этом способе управления точка равновесия ротора смещается на половину шага относительно способа с одной фазой, а момент возрастает примерно на 40 процентов.
Применение полушагового режима управления шаговым двигателем позволяет увеличить количество шагов, приходящихся на один оборот ротора, в два раза. При работе ШД в таком режиме на каждый второй шаг приходится включение одной из фаз, а между шагами включаются сразу обе. Фактически это комбинация переменного включения однофазного и двухфазного полношаговых режимов.
Микрошаговый режим управления ШД применяется тогда, когда необходимо получение максимально большого количества шагов, приходящихся на оборот ротора. При работе в таком режиме так же работают две фазы, однако токи обмоток в данном случае распределяются неравномерно, а не 50/50, как в полушаговом. Величина микрошага зависит от конкретного устройства и настроек драйвера. При работе в микрошаговом режиме точность позиционирования ШД значительно повышается, однако требуется более сложный драйвер двигателя.
Где приобрести драйвера ШД? Купить драйвера шаговых двигателей можно у нас в онлайн магазине с доставкой!
Конструктивные исполнения ШД
Обычный шаговый двигатель
Тут нет никаких изысков – корпус, вал, в общем стандарт. Широко распространен в разном оборудовании, начиная от фрезеров и 3д принтеров, заканчивая приводом заслонки или мешалки.
Двигатель с полым валом
Шаговые двигатели с полым валом применяются когда существует необходимость передачи крутящего момента без применения соединительных муфт, например для использования в ограниченном пространстве. Так же сквозь него можно продеть длинный вал, который будет торчать с двух сторон и синхронно крутить что-то с одной и с другой стороны.
Двигатель со встроенной в вал приводной гайкой
Такой вид двигателя может найти применение в том случае, если требуется быстрое перемещение на большое расстояние. Длинный винт на высоких оборотах ведет себя подобно скакалке, а при использовании такого мотора винт можно неподвижно натянуть между опорами, а сам мотор закрепить на подвижной части оборудования. Тогда длина и нежесткость винта не будет влиять на максимальную скорость.
Двигатель с двойным валом
В этом исполнении двигатель имеет удлиненный вал, длинный конец которого выступает со стороны задней крышки. На этот удлиненный вал можно повесить барашек, чтоб можно было выставить положение вала вручную, повесить энкодер и получить сервошаговый двигатель, а можно повесить дополнительный шкив или винт, которые будут работать абсолютно синхронно с передним валом.
Двигатель с винтом вместо вала
Находят себе применение например в 3д принтерах или в любом другом месте, где хочется сэкономить место не только на муфте между валом и винтом, но и на подшипниковой опоре винта, роль которой в данном случае выполняют подшипники двигателя.
Двигатель со встроенным тормозом
Позволяет зафиксировать вал в нужной позиции дополнительно к удержанию самим шаговиком. Так же позволяет удерживать вал в случае отключения питания двигателя.
Двигатель с редуктором
Редуктор позволяет понизить обороты двигателя и поднять его крутящий момент. Данное исполнение редко встречается в связи с тем, что шаговые двигатели и так имеют значительный момент на низких оборотах и сами по себе могут достигать весьма низких скоростей вращения.
Двигатель с энкодером
Он же сервошаговый двигатель. Фактически это сервопривод на шаговом двигателе. На удлиненный вал со стороны задней крышки монтируется энкодер в корпусе и благодаря этому мы получаем обратную связь о положении вала двигателя. В случае пропуска шагов двигателем контроллер узнает об этом и ориентируясь на показания энкодера будет подавать дополнительные импульсы до тех пор, пока вал не займет нужное положение. Сервошаговый двигатель используется со своим специальным драйвером, который имеет вход для подключения энкодера.
Преимущества шагового двигателя
- угол поворота ротора определяется числом поданных импульсов. Шаговый двигатель крутится не плавно, а шагами, шаг имеет определенную величину. Поэтому чтобы повернуть вал в нужное положение мы просто подаем известное нам количество импульсов.
- зависимость положения от входных импульсов обеспечивает позиционирование без обратной связи. Один шаг – один импульс. Какое количество импульсов подали, в то положение двигатель и шагнул.
- двигатель обеспечивает полный момент в режиме остановки. Это хорошо тем, что для фиксации положения вала запитанному двигателю не нужен тормоз, можно тормозить его при помощи драйвера.
- прецизионное позиционирование и повторяемость. Хорошие шаговые двигатели имеют точность от 3 до 5% от величины шага. Эта ошибка не накапливается от шага к шагу, так как на один оборот двигателя приходится неизменное количество шагов, совершив которые мы всегда получим поворот на 360 градусов.
- высокая надежность. Высокая надежность двигателя связанна с отсутствием щеток. Срок службы фактически определяется сроком службы подшипников
- возможность получения низких скоростей вращения. Для получения низкой скорости вращения двигателя достаточно замедлить скорость подачи импульсов, тогда двигатель будет медленнее шагать и скорость его вращения будет небольшой.
- большой крутящий момент на низких скоростях. Большой крутящий момент на низких оборотах позволяет отказаться от применения редуктора, что упрощает конструкцию оборудования
- может быть перекрыт довольно большой диапазон скоростей. Скорость вращения двигателя пропорциональна частоте входных импульсов, подавая их быстрее или медленнее мы так же влияем и на скорость вращения.
Недостатки шагового двигателя:
- шаговым двигателем присуще явление резонанса. Шаговые двигатели обладают собственной резонансной частотой. Это связано с тем, что ротор после подачи тока в обмотку некоторое время колеблется, прежде чем зафиксироваться в конечном положении, и колебания тем сильней, чем больше инерция ротора. Резонанс приводит к повышенному шуму, вибрациям и падению крутящего момента двигателя. Один из способов победить резонанс – увеличить деление шага. Мелкие перемещения в микрошаге не требуют длительных разгона и фиксации ротора, быстро останавливают его между шагами и увеличивают частоту шагания выше резонансной.
- возможна потеря контроля положения ввиду работы без обратной связи. При превышении усилия на валу выше того, который может создать двигатель, он начнет пропускать шаги. Так как у двигателя нет обратной связи, то контроллер не может узнать об этом и даже если двигатель начнет вращаться снова, стартует он уже из неправильного рабочего положения. Для устранения этого недостатка можно использовать сервошаговый двигатель или увеличить момент на валу, повысив напряжение, настроив драйвер на больший ток или заменив двигатель на более мощный.
- потребляет энергию независимо от нагрузки. Шаговый двигатель в промежуточном положении фиксируется с полным моментом. Шагает он тоже с полным моментом. Поэтому он продолжает потреблять электричество без особой зависимости от нагрузки на валу. Снизить общее потребление энергии двигателем мы можем применив драйвера, которые уменьшают подаваемый в режиме удержания ток.
- затруднена работа на высоких скоростях. На высоких скоростях вращения шаговый двигатель значительно теряет момент и при достижении определенной частоты оборотов момент становится настолько мал, что вал не может дальше крутиться. В этом момент двигатель останавливается и гудит с частотой подаваемых импульсов. Этот недостаток можно устранить, повысив питающее напряжение, что увеличит крутящий момент как на повышенных, так и на пониженных оборотах, использовать более продвинутый драйвер, который на высоких скоростях вращения переходит на полношаговый режим управления двигателем или попросту заменив шаговик на сервопривод, который рассчитан на высокие скорости.
- невысокая удельная мощность.Шаговый двигатель по удельной мощности на грамм веса не самый энергонасыщенный электропривод. Сделать с этим мы ничего не можем.
- относительно сложная схема управления.Драйвера шаговых двигателей насыщены электроникой. Тут мы тоже не можем что-то изменить.
Как выбрать шаговый двигатель? На какие параметры обратить внимание.
По большому счету, выбор двигателя сводится к выбору нескольких вещей:
- вида двигателя (его размеры)
- тока фазы
- индуктивность
Что касается вида двигателя, то при отсутствии каких-то определенных предпочтений мы бы рекомендовали использовать биполярные шаговые двигатели с 4 выводами, так как они наиболее распространены и, что не менее важно, не менее распространены драйвера для них. То есть случае какой-либо поломки вы легко найдете замену и отремонтируете станок.
Размер двигателя и его ток проще всего подобрать, ориентируясь на готовые станки от известных производителей, которые близки к конструируемому по размерам и характеристикам — проверенная конструкция означает, что двигатели уже подобраны оптимальным образом и можно взять их характеристики за основу. Производитель двигателя в данном случае не особо важен, так как ввиду отработанной технологии производства их характеристики у разных производителей примерно одинаковые.
Остается одна характеристика – индуктивность.
При одинаковом напряжении питания двигатели с большей индуктивностью имеют больший момент на низких оборотах, и меньший – на высоких, как видно из графика. Но большая индуктивность потенциально дает вам возможность получить больший крутящий момент, повысив напряжение питания, тогда как при использовании двигателей с небольшой индуктивностью повышение напряжения может привести к тому, что двигатель будет перегреваться без заметной прибавки в характеристиках. Это связано с тем, что нарастание тока в обмотках с низкой индуктивностью идет быстрее и мы легко можем получить среднее значение тока выше номинального, а как следствие этого – перегрев. Таким образом при прочих равных лучше выбрать двигатель с большим значением индуктивности.
Низковольтное комплектное устройство НКУ «Ассоль»
Состав низковольтного комплектного устройства
НКУ представляет собой низковольтные коммутационные аппараты и устройствауправления, измерения, сигнализации, защиты и регулирования, собранные напредприятии-изготовителе на единой конструктивной основе со всеми внутренними электрическими и механическими соединениями. НКУ состоит из различныхфункциональных блоков.
Функциональный блок — это часть НКУ, содержащая электрические и механические элементы, обеспечивающая выполнение одной функции.Функциональные блоки размещаются в шкафах, количество которых зависит от типаи состава оборудования, а также назначения НКУ. Структурный состав НКУ приведенна рисунке 2.
Шкафы ввода (ШВ) предназначены для подключения силовых вводов к секциямсборных шин и питания отходящих линий. В зависимости от исполнения в ШВ могутустанавливаться коммутационные и защитные аппараты, приборы контроля параметров и учета электроэнергии, светосигнальная аппаратура. Количество ШВ, какправило, соответствует количеству силовых вводов НКУ.
Шкафы секционные (ШС) предназначены для секционирования сборных шин НКУ.В зависимости от исполнения ШС может содержать коммутационные и защитныеаппараты, аппаратуру автоматического включения резерва (АВР), светосигнальную аппаратуру. Количество ШС зависит от количества секций сборных шин.Шкафы отходящих линий (ШЛ) предназначены для установки коммутационных и защитных аппаратов и аппаратуры управления отходящих линий.
Наиболее распространенная компоновка НКУ включает в себя два ШВ, один ШС, несколько ШЛ, шкафы кабельных соединений (ШК) и, при необходимости, шкафы шинных соединений (ШШ), шинные мосты (ШМ) и шинные переходы (ШП).
Для сокращения сроков проектирования и изготовления НКУ, а также улучшенияусловий его эксплуатации специалистами предприятия-изготовителя разработаныунифицированные модули. Модули представляет собой часть функциональногоблока НКУ, состоящую из монтажной панели с размещенной на ней аппаратурой илицевой панели (двери), на которой установлены органы управления аппаратами,приборы контроля и сигнализации. Модули могут быть стационарного и выдвижного исполнений.
Благодаря модульности конструкции НКУ и разнообразию схемных решений возможно размещение различных функциональных блоков, например, блоков ввода исекционирования в одном шкафу, или одновременная установка в ШЛ унифицированных модулей и модулей свободного проектирования стационарного и выдвижного исполнений.
Функциональные возможности
Функциональные возможности НКУ зависят от выбранных вариантов схем управления. Схемы управления выбираются в соответствии с потребностями заказчика, с
учетом специфики применения НКУ. НКУ может быть изготовлено как с применением типовых схем предприятия-изготовителя, так и по схемам, предоставленным заказчиком.
В общем случае в НКУ реализованы следующие функции:
- контроль параметров питающего напряжения (диапазон, обрыв фаз, асимметрия) и тока, учет электроэнергии, контроль состояния аппаратов;
- выдача сигналов о состоянии оборудования НКУ во внешнюю систему диспетчеризации или АСУ ТП, в том числе с использованием промышленных протоколов Modbus RTU, Profi bus, Ethernet и т.д.;
- АВР с произвольным алгоритмом, самозапуск электродвигателей, подключенных к НКУ, управление коммутационными аппаратами с учетом взаимных блокировок;
- плавный пуск и частотное регулирование электродвигателей, подключенных к НКУ, при использовании соответствующих модулей отходящих линий;
- визуальный контроль величин токов и напряжений, световая индикация режимов работы.
Несущая конструкция и оболочка комплектного устройства
Несущая конструкция и оболочка НКУ изготавливается из конструктивных элементов системы «Techno Module» фирмы Elsteel.
НКУ изготавливается и поставляется в виде отдельных транспортных секций полной заводской готовности. Максимальная длина транспортной секции (без упаковки) – 2450 мм. По требованию заказчика возможно изготовление транспортной секции большей длины.
Конструктивно транспортная секция НКУ представляет собой металлический шкаф (или несколько шкафов), состоящий из каркаса установленного на цоколь, разделительных перегородок, монтажных панелей с оборудованием, системы шин на изоляторах и внешней оболочки, состоящей из съемных панелей и дверей. Все конструктивные элементы окрашены порошковым методом. Цвет окраски элементов каркаса, панелей и дверей – RAL 7032, разделительных перегородок – RAL 9016, цоколя – RAL 9005.
Возможно изготовление НКУ П – образной и Г – образной конфигураций, что позволяет эффективно использовать свободное пространство помещения, в котором устанавливается НКУ. Каркас НКУ собирается из специального профиля, выполненного из холоднокатаного стального листа толщиной 2 мм с цинковым покрытием, предотвращающим коррозию. Профили каркаса соединяются угловыми фиксаторами. Разделение на секции и отсеки, а также обеспечение прочности конструкции выполняется при помощи широкой номенклатуры модульных элементов (рейки, разделительные панели и др.).
Цоколь выполняет опорную функцию. Он собирается из профиля и соединительных уголков. Цоколь имеет два исполнения: стандартное и усиленное. Стандартный цоколь изготавливается из холоднокатаного стального листа толщиной 2 мм. Усиленный цоколь изготавливается из холоднокатаного стального листа толщиной 3 мм. Усиленный цоколь применяется для НКУ с током сборных шин более 4000 А. Стандартная высота цоколя 100 мм. По требованию заказчика возможно изготовление цоколя высотой 200 мм.
Разделительные перегородки обеспечивают требуемый вид внутреннего разделения НКУ.
Монтажные панели предназначены для установки аппаратуры (автоматических выключателей, элементов управления и др.).
Двери и съемные панели НКУ изготавливаются из стального листа толщиной 1,5 мм. Двери устанавливаются со стороны обслуживания НКУ (для двухстороннего обслуживания с двух сторон). Двери комплектуются замками с общим ключом. По желанию заказчика двери могут быть оборудованы специальными замками, окнами, стабилизаторами жесткости, возможна установка фальш-панелей. Конструкция дверей и панелей обеспечивает степень защиты по ГОСТ 14254-96 до IP55 включительно.
Система шин
В составе низковольтных комплектных устройств применяются шины из высококачественной твердой безкислородной электротехнической меди. Система сборных шин выполняется с применением типовых закладных элементов и позволяет формировать магистрали любой конфигурации на токи до 7100А. При токах сборных шин выше 1250 А в НКУ применяется нескольких полос медной шины на каждую фазу (см. рис. 4). Это обеспечивает наилучшее охлаждение шин во время работы, а также повышает технологичность изготовления шинной системы. В НКУ используется несколько типов шинных держателей, что позволяет рационально размещать шины. Возможно изготовление НКУ с изолированными шинами.
Внутреннее разделение
Шкафы НКУ разделены на отсеки (см. рисунок):
В шинном отсеке (1) размещаются сборные и распределительные шины, держатели шин (изоляторы) и шинные выводы для подключения к шинному мосту (если это предусмотрено проектом). Шинный отсек может располагаться сверху, снизу или сзади шкафов НКУ.
В аппаратных отсеках (2) размещается электроаппаратура НКУ. Возможны три варианта размещения аппаратуры в отсеках: стационарное, съемное и выдвижное. Для подключения отходящих линий могут использоваться унифицированные модули распределения, управления и автоматики. Модули могут иметь стационарное и выдвижное исполнения. Выдвижное исполнение позволяет проводить «горячую» замену неисправных модулей, их ремонт, проверку и наладку без снятия напряжения с шин НКУ.
Аппаратные отсеки располагаются со стороны обслуживания НКУ.
Кабельные отсеки (3) предназначены для размещения и подключения подходящих и отходящих кабелей. Кабельные отсеки располагаются справа, слева и сзади аппаратных отсеков. Возможно объединение аппаратного и кабельного отсеков в пределах одного шкафа. Конструкция НКУ позволяет реализовать все виды внутреннего разделения, предусмотренные п. 7.7 ГОСТ Р 51321.1-2007. Вид внутреннего разделения выбирается, исходя из назначения НКУ, состава оборудования и исполнения унифицированных модулей (стационарные или выдвижные).
Что такое U-143 — значение слова, научные факты — Википедия
U-143 — малая немецкая подводная лодка типа II-D для прибрежных вод, времён Второй мировой войны. Заводской номер 272.
| U-143 | |
|---|---|
| Государство флага | Германия |
| Спуск на воду | 10 августа 1940 |
| Тип корабля | Малая ДПЛ |
| Обозначение проекта | IID |
| Скорость (надводная) | 12,7 узла |
| Скорость (подводная) | 7,9 узла |
| Предельная глубина погружения | 150 |
| Экипаж | 26 человек |
| Водоизмещение надводное | 314 т |
| Водоизмещение подводное | 364 т |
| Длина наибольшая (по КВЛ) |
44 м |
| Ширина корпуса наиб. | 4,92 м |
| Высота | 8,4 м |
| Средняя осадка (по КВЛ) |
3,93 м |
|
6-цилиндровый 4-тактный «MWM» RS127S 2×350 Электродвигатель «Siemens» 2×210 |
|
| Артиллерия | 1 x 2 cm/65 C/30 (1000 снарядов) |
| Торпедно- минное вооружение |
3 TA 5 торпед или 18 мин(по другим данным 12 ТМА) |
Введена в строй 18 сентября 1940 года. Входила в 1-ю флотилию, с 3 ноября 1940 года находилась в 24-й флотилии, с 1 января 1941 года находилась в 22-й флотилии в качестве учебной лодки. С 1 апреля 1941 года находилась в 3-й флотилии, с 13 сентября 1941 года входила в 22-ю флотилию. Совершила 4 боевых похода, потопила одно судно (1 409 брт). После капитуляции Германии субмарина была передана британскому военному флоту.
Электродвигатель— Википедия, бесплатная энциклопедия
Из Википедии, свободной энциклопедии
Электродвигатель преобразует электрическую энергию в механическое движение. Обратная задача — преобразование механического движения в электрическую энергию — выполняется генератором или динамо-машиной. Во многих случаях два устройства различаются только своим применением и незначительными деталями конструкции, а некоторые приложения используют одно устройство для выполнения обеих ролей.Например, тяговые двигатели, используемые на локомотивах, часто выполняют обе задачи, если локомотив оборудован динамическими тормозами.
Операция
Большинство электродвигателей работают за счет электромагнетизма, но также существуют двигатели, основанные на других электромеханических явлениях, таких как электростатические силы и пьезоэлектрический эффект. Фундаментальный принцип, на котором основаны электромагнитные двигатели, заключается в том, что на любой провод действует механическая сила, когда он проводит электричество, находясь в магнитном поле.Сила описывается законом силы Лоренца и перпендикулярна как проводу, так и магнитному полю. Большинство магнитных двигателей являются вращающимися, но существуют и линейные типы. В роторном двигателе вращающаяся часть (обычно внутри) называется ротором, а неподвижная часть — статором. Ротор вращается, потому что провода и магнитное поле расположены так, что вокруг оси ротора создается крутящий момент. Двигатель содержит электромагниты, намотанные на раму. Хотя эту раму часто называют арматурой, этот термин часто используют ошибочно.Правильно, якорь — это та часть двигателя, на которую подается входное напряжение. В зависимости от конструкции машины якорь может служить как ротор, так и статор.
Двигатели постоянного тока
Электродвигатели различных типоразмеров.Один из первых электромагнитных роторных двигателей был изобретен Майклом Фарадеем в 1821 году и состоял из свободно висящего провода, погруженного в бассейн с ртутью. Постоянный магнит был помещен в середину ртутной ванны. Когда через провод пропускали ток, он вращался вокруг магнита, показывая, что ток порождал круговое магнитное поле вокруг провода.Этот мотор часто демонстрируется на школьных уроках физики, но иногда вместо токсичной ртути используется рассол (соленая вода). Это простейшая форма класса электродвигателей, называемых униполярными двигателями. Более поздняя доработка — Колесо Барлоу.
В другой ранней конструкции электродвигателя использовался поршень возвратно-поступательного действия внутри переключаемого соленоида; концептуально его можно рассматривать как электромагнитную версию двухтактного двигателя внутреннего сгорания.
Современный двигатель постоянного тока был изобретен случайно в 1873 году, когда Зеноб Грамм соединил вращающуюся динамо-машину со вторым аналогичным устройством, приведя его в действие как двигатель.
Классический двигатель постоянного тока имеет вращающийся якорь в виде электромагнита. Поворотный переключатель, называемый коммутатором, меняет направление электрического тока дважды за цикл, чтобы он протекал через якорь, так что полюса электромагнита толкаются и притягиваются к постоянным магнитам на внешней стороне двигателя. Когда полюса электромагнита якоря проходят через полюса постоянных магнитов, коммутатор меняет полярность электромагнита якоря. В момент переключения полярности инерция поддерживает классический двигатель в нужном направлении.(См. Схемы ниже.)
Простой электродвигатель постоянного тока. Когда катушка запитана, вокруг якоря создается магнитное поле. Левая сторона якоря отодвигается от левого магнита и тянется вправо, вызывая вращение. Якорь продолжает вращаться. Когда якорь выравнивается по горизонтали, коммутатор меняет направление тока через катушку на противоположное, изменяя направление магнитного поля. Затем процесс повторяется.Электродвигатель постоянного тока с возбуждением от возбуждения
Постоянные магниты на внешней стороне (статоре) двигателя постоянного тока могут быть заменены электромагнитами.Изменяя ток возбуждения, можно изменять соотношение скорость / крутящий момент двигателя. Обычно обмотка возбуждения размещается последовательно (последовательно намотанная) с обмоткой якоря для получения низкоскоростного двигателя с высоким крутящим моментом, параллельно (параллельная обмотка) с якорем для получения высокоскоростного двигателя с низким крутящим моментом или для частичной обмотки. параллельно и частично последовательно (составная намотка) для баланса, обеспечивающего стабильную скорость в диапазоне нагрузок. Дальнейшее уменьшение тока возбуждения возможно для получения еще более высокой скорости, но, соответственно, более низкого крутящего момента, что называется режимом «слабого поля».
Регулировка скорости
Вообще говоря, скорость вращения двигателя постоянного тока пропорциональна приложенному к нему напряжению, а крутящий момент пропорционален току. Регулировка скорости может быть достигнута с помощью регулируемых выводов аккумуляторной батареи, переменного напряжения питания, резисторов или электронного управления. Направление двигателя постоянного тока с обмоткой возбуждения можно изменить, поменяв местами подключения возбуждения или якоря, но не то и другое вместе, это обычно делается с помощью специального набора контакторов (контакторов направления).
Эффективное напряжение можно изменять, вставляя последовательный резистор или с помощью переключающего устройства с электронным управлением, состоящего из тиристоров, транзисторов или, исторически, ртутных дуговых выпрямителей. В цепи, известной как прерыватель, среднее напряжение, приложенное к двигателю, изменяется путем очень быстрого переключения напряжения питания. Поскольку отношение «включено» к «выключено» изменяется для изменения среднего приложенного напряжения, скорость двигателя изменяется. Быстрое переключение требует меньше энергии, чем последовательные резисторы.Выходные фильтры сглаживают среднее напряжение, подаваемое на двигатель, и снижают шум двигателя.
Поскольку двигатель постоянного тока с последовательным заводом развивает максимальный крутящий момент на низкой скорости, он часто используется в тяговых устройствах, таких как электровозы и трамваи. Другое применение — стартеры для бензиновых и небольших дизельных двигателей. Серийные двигатели никогда не должны использоваться в приложениях, где привод может выйти из строя (например, ременные передачи). По мере ускорения двигателя ток якоря (и, следовательно, возбуждения) уменьшается.Уменьшение поля заставляет двигатель ускоряться (см. «Слабое поле» в последнем разделе). Как следствие, скорость двигателя стремится к бесконечности, но двигатель самоуничтожится, прежде чем начнет так быстро вращаться.
Одним из интересных методов управления скоростью двигателя постоянного тока был Ward-Leonard Control. Это метод управления двигателем постоянного тока (обычно с шунтирующей или составной обмоткой) и был разработан как метод обеспечения двигателя с регулируемой скоростью от источника переменного тока, хотя он имел свои преимущества в схемах постоянного тока.Источник переменного тока используется для привода двигателя переменного тока, обычно асинхронного двигателя, который приводит в действие генератор постоянного тока или динамо-машину. Выход постоянного тока из якоря напрямую подключен к якорю двигателя постоянного тока (обычно идентичной конструкции). Шунтирующие обмотки возбуждения обеих машин постоянного тока возбуждаются через переменный резистор от якоря генератора. Этот переменный резистор обеспечивает исключительно хорошее управление скоростью от состояния покоя до полной скорости и постоянный крутящий момент. Этот метод управления был фактически методом с момента его разработки до тех пор, пока его не вытеснили твердотельные тиристорные системы.Она нашла применение практически в любой среде, где требовалось хорошее управление скоростью, от пассажирских лифтов до обмотки головок большой шахты и даже промышленного технологического оборудования и электрических кранов. Его принципиальным недостатком было то, что для реализации схемы требовалось 3 машины (5 в очень больших установках, поскольку машины постоянного тока часто дублировались и управлялись тандемным переменным резистором). Во многих случаях установка двигатель-генератор часто оставалась постоянно работающей, чтобы избежать задержек, которые в противном случае были бы вызваны ее запуском по мере необходимости.На момент написания (май 2006 г.) существует множество устаревших установок Ward-Leonard.
Универсальные двигатели
Вариантом электродвигателя постоянного тока является универсальный электродвигатель . Название происходит от того факта, что он может использовать переменный или постоянный ток питания, хотя на практике они почти всегда используются с источниками переменного тока. Принцип заключается в том, что в двигателе постоянного тока с обмоткой поля ток как в поле, так и в якоре (и, следовательно, результирующие магнитные поля) будут чередоваться (обратная полярность) в одно и то же время, и, следовательно, генерируемая механическая сила всегда в одном и том же направлении. .На практике двигатель должен быть специально спроектирован для работы с переменным током (необходимо учитывать импеданс, а также пульсирующую силу), и получаемый в результате двигатель обычно менее эффективен, чем эквивалентный чистый двигатель постоянного тока . При работе на нормальных частотах линии электропередачи максимальная мощность универсальных двигателей ограничена, а двигатели мощностью более одного киловатта встречаются редко. Но универсальные двигатели также составляют основу традиционного железнодорожного тягового двигателя. В этом приложении, чтобы сохранить высокий электрический КПД, они работали от источников переменного тока с очень низкой частотой с частотой 25 Гц и 16 2/3 Гц.Поскольку это универсальные двигатели, локомотивы, использующие эту конструкцию, также обычно могли работать от третьего рельса с питанием от постоянного тока.
Преимущество универсального двигателя заключается в том, что источники питания переменного тока могут использоваться на двигателях, которые имеют типичные характеристики двигателей постоянного тока, в частности, с высоким пусковым моментом и очень компактной конструкцией, если используются высокие скорости вращения. Отрицательный аспект — проблемы с обслуживанием и коротким сроком службы, вызванные коммутатором. В результате такие двигатели обычно используются в устройствах переменного тока, таких как миксеры для пищевых продуктов и электроинструменты, которые используются только с перерывами.Непрерывное управление скоростью универсального двигателя, работающего от переменного тока, очень легко достигается с помощью тиристорной схемы, в то время как ступенчатое регулирование скорости может выполняться с использованием нескольких отводов на катушке возбуждения. Бытовые блендеры, рекламирующие много скоростей, часто сочетают в себе катушку возбуждения с несколькими ответвлениями и диод, который можно вставить последовательно с двигателем (в результате чего двигатель работает на полуволновом постоянном токе с половиной среднеквадратичного напряжения линии питания переменного тока).
В отличие от двигателей переменного тока, универсальные двигатели могут легко превысить один оборот за цикл сетевого тока.Это делает их полезными для таких приборов, как блендеры, пылесосы и фены, где требуется высокая скорость работы. Моторы многих пылесосов и триммеров для сорняков превышают 10 000 об / мин, Dremel и другие подобные миниатюрные шлифовальные машины часто превышают 30 000 об / мин. Теоретический универсальный двигатель, которому разрешено работать без механической нагрузки, будет превышать скорость, что может привести к его повреждению. В реальной жизни, однако, различное трение подшипников, «парусность» якоря и нагрузка любого встроенного охлаждающего вентилятора — все это предотвращает превышение скорости.
Из-за очень низкой стоимости полупроводниковых выпрямителей в некоторых приложениях, в которых раньше использовался универсальный двигатель, теперь используется чистый двигатель постоянного тока, обычно с полем постоянного магнита. Это особенно верно, если полупроводниковая схема также используется для регулирования скорости.
Преимущества универсального двигателя и распределения переменного тока сделали установку низкочастотной системы распределения тягового тока экономичной для некоторых железнодорожных установок. На достаточно низких частотах характеристики двигателя примерно такие же, как если бы двигатель работал от постоянного тока.Использовались частоты всего 16 2/3 Гц.
Двигатели переменного тока
Типичный двигатель переменного тока состоит из двух частей:
- Внешний стационарный статор с катушками, на которые подается переменный ток для создания вращающегося магнитного поля, и;
- Внутренний ротор, прикрепленный к выходному валу, которому крутящий момент создается вращающимся полем.
Существует два основных типа двигателей переменного тока в зависимости от типа используемого ротора:
- Синхронный двигатель, который вращается точно с частотой питающей сети или долей частоты питающей сети, и;
- Асинхронный двигатель, который вращается немного медленнее и обычно (хотя и не всегда) имеет форму двигателя с короткозамкнутым ротором.
Принцип вращающегося магнитного поля, который обычно приписывают Николе Тесле в 1882 году или около того, использовался такими учеными, как Майкл Фарадей в 1820-х годах, а затем Джеймс Клерк Максвелл. Тесла, однако, использовал этот принцип для разработки уникального двухфазного асинхронного двигателя в 1883 году. Майкл фон Доливо-Добровльски изобрел первый современный трехфазный «ротор с клеткой» в 1890 году. Введение двигателя с 1888 года и далее положило начало тому, что известно. как Вторая промышленная революция, сделавшая возможным эффективное производство и распределение электроэнергии на большие расстояния с использованием системы передачи переменного тока, также изобретение Теслы (1888 г.) [1].Первая успешная коммерческая трехфазная система генерации и передачи на большие расстояния была спроектирована Альмерианом Декером в Милл-Крик № 1 [2] в Редлендс, Калифорния. [3]
Трехфазные асинхронные двигатели переменного тока
Трехфазные асинхронные двигатели переменного тока мощностью 1 л.с. (746 Вт) и 25 Вт с небольшими двигателями от проигрывателя компакт-дисков, игрушек и привода считывателя компакт-дисков и DVD-дисков.Там, где имеется многофазный источник питания, обычно используется трехфазный (или многофазный) асинхронный двигатель переменного тока, особенно для двигателей большей мощности.Разность фаз между тремя фазами многофазного источника питания создает вращающееся электромагнитное поле в двигателе.
Благодаря электромагнитной индукции вращающееся магнитное поле индуцирует ток в проводниках в роторе, который, в свою очередь, создает уравновешивающее магнитное поле, которое заставляет ротор вращаться в направлении вращения поля. Ротор всегда должен вращаться медленнее, чем вращающееся магнитное поле, создаваемое многофазным источником питания; в противном случае в роторе не будет создаваться уравновешивающее поле.
Асинхронные двигателиявляются «рабочими лошадками» промышленности, и двигатели мощностью до 500 кВт производятся в строго стандартизированных типоразмерах, что делает их практически полностью взаимозаменяемыми между производителями (хотя стандартные размеры в Европе и Северной Америке отличаются). Очень большие синхронные двигатели могут иметь выходную мощность в десятки тысяч кВт для трубопроводных компрессоров и приводов в аэродинамической трубе.
В асинхронных двигателях используются два типа роторов.
Роторы с короткозамкнутым ротором: В большинстве двигателей переменного тока используется ротор с короткозамкнутым ротором, который можно найти практически во всех бытовых и легких промышленных двигателях переменного тока.Беличья клетка получила свое название от своей формы — кольца на обоих концах ротора, с перемычками, соединяющими кольца по всей длине ротора. Обычно это литой алюминий или медь, залитые между железными пластинами ротора, и обычно видны только концевые кольца. Подавляющее большинство токов ротора будет проходить через стержни, а не через ламинаты с более высоким сопротивлением и обычно покрытые лаком. Очень низкие напряжения при очень высоких токах типичны для шин и концевых колец; В высокоэффективных двигателях часто используется литая медь, чтобы уменьшить сопротивление ротора.
В работе двигатель с короткозамкнутым ротором можно рассматривать как трансформатор с вращающейся вторичной обмоткой — когда ротор не вращается синхронно с магнитным полем, индуцируются большие токи ротора; большие токи ротора намагничивают ротор и взаимодействуют с магнитными полями статора, чтобы синхронизировать ротор с полем статора. Двигатель с короткозамкнутым ротором без нагрузки при синхронной скорости будет потреблять электроэнергию только для поддержания скорости ротора с учетом потерь на трение и сопротивление; по мере увеличения механической нагрузки будет увеличиваться и электрическая нагрузка — электрическая нагрузка по своей природе связана с механической нагрузкой.Это похоже на трансформатор, где электрическая нагрузка первичной обмотки связана с электрической нагрузкой вторичной обмотки.
Вот почему, например, электродвигатель вентилятора с короткозамкнутым ротором может приводить к затемнению света в доме при запуске, но не приглушает свет, когда его вентиляторный ремень (и, следовательно, механическая нагрузка) снимается. Кроме того, остановившийся двигатель с короткозамкнутым ротором (перегруженный или с заклинившим валом) будет потреблять ток, ограниченный только сопротивлением цепи, при попытке запуска. Если что-то еще не ограничивает ток (или не отключает его полностью), вероятным результатом является перегрев и разрушение изоляции обмотки.
Практически каждая стиральная машина, посудомоечная машина, отдельный вентилятор, проигрыватель и т. Д. Использует какой-либо вариант двигателя с короткозамкнутым ротором.
Ротор с обмоткой: Альтернативная конструкция, называемая ротором с обмоткой, используется, когда требуется регулировка скорости. В этом случае ротор имеет такое же количество полюсов, что и статор, а обмотки выполнены из проволоки, соединенной с контактными кольцами на валу. Угольные щетки подключают контактные кольца к внешнему контроллеру, например, к переменному резистору, который позволяет изменять скорость скольжения двигателя.В некоторых мощных приводах с регулируемой скоростью вращения ротора энергия частоты скольжения улавливается, выпрямляется и возвращается в источник питания через инвертор.
По сравнению с роторами с короткозамкнутым ротором, двигатели с фазным ротором дороги и требуют обслуживания контактных колец и щеток, но они были стандартной формой для регулирования скорости до появления компактных силовых электронных устройств. Транзисторные инверторы с частотно-регулируемым приводом теперь могут использоваться для управления скоростью, а двигатели с фазным ротором становятся все реже.(Транзисторные инверторные приводы также позволяют использовать более эффективные трехфазные двигатели, когда доступен только однофазный сетевой ток, но это никогда не используется в бытовых приборах, потому что это может вызвать электрические помехи и из-за высоких требований к мощности. )
Используются несколько способов запуска многофазного двигателя. Там, где допустимы большой пусковой ток и высокий пусковой момент, двигатель можно запустить через линию, подав полное линейное напряжение на клеммы.Если необходимо ограничить пусковой пусковой ток (если мощность двигателя больше, чем у источника питания при коротком замыкании), используется пуск с пониженным напряжением с использованием последовательных катушек индуктивности, автотрансформатора, тиристоров или других устройств. Иногда используется метод пуска со звезды на треугольник, когда катушки двигателя сначала соединяются звездой для ускорения нагрузки, а затем переключаются на треугольник, когда нагрузка достигает скорости. Этот метод более распространен в Европе, чем в Северной Америке.Транзисторные приводы могут напрямую изменять приложенное напряжение в зависимости от пусковых характеристик двигателя и нагрузки.
Этот тип двигателя становится все более распространенным в тяговых приложениях, таких как локомотивы, где он известен как асинхронный тяговый двигатель.
Скорость двигателя переменного тока определяется в первую очередь частотой сети переменного тока и количеством полюсов в обмотке статора в соответствии с соотношением:
- N с = 120 F / p
где
- N с = Синхронная скорость, в оборотах в минуту
- F = частота переменного тока
- p = Количество полюсов на фазную обмотку
Фактическая частота вращения асинхронного двигателя будет меньше этой расчетной синхронной скорости на величину, известную как скольжение , которая увеличивается с создаваемым крутящим моментом.Без нагрузки скорость будет очень близка к синхронной. При нагрузке стандартные двигатели имеют скольжение 2-3%, специальные двигатели могут иметь скольжение до 7%, а класс двигателей, известный как моментные двигатели , рассчитан на работу при 100% скольжении (0 об / мин / полный останов).
Скольжение двигателя переменного тока рассчитывается по:
- S = ( N s — N r ) / N s
где
- N r = Скорость вращения в оборотах в минуту.
- S = нормализованное скольжение, от 0 до 1.
В качестве примера типичный четырехполюсный двигатель, работающий на частоте 60 Гц, может иметь номинальную мощность на паспортной табличке 1725 об / мин при полной нагрузке, в то время как его расчетная скорость составляет 1800.
Скорость в этом типе двигателя традиционно изменялась за счет наличия дополнительных наборов катушек или полюсов в двигателе, которые можно включать и выключать для изменения скорости вращения магнитного поля. Однако развитие силовой электроники означает, что частота источника питания теперь также может быть изменена, чтобы обеспечить более плавное управление скоростью двигателя.
Трехфазные синхронные двигатели переменного тока
Если соединения с обмотками ротора трехфазного двигателя сняты на контактных кольцах и подают отдельный ток возбуждения для создания непрерывного магнитного поля (или если ротор состоит из постоянного магнита), результат называется синхронным. двигатель, потому что ротор будет вращаться синхронно с вращающимся магнитным полем, создаваемым многофазным источником питания.
Синхронный двигатель также может использоваться в качестве генератора переменного тока.
В настоящее время синхронные двигатели часто приводятся в действие транзисторными частотно-регулируемыми приводами. Это значительно облегчает запуск массивного ротора большого синхронного двигателя. Они также могут запускаться как асинхронные двигатели с использованием обмотки с короткозамкнутым ротором, которая имеет общий ротор: как только двигатель достигает синхронной скорости, в обмотке с короткозамкнутым ротором не индуцируется ток, поэтому он мало влияет на синхронную работу двигателя. помимо стабилизации скорости двигателя при изменении нагрузки.
Синхронные двигатели иногда используются в качестве тяговых двигателей; TGV может быть самым известным примером такого использования.
Однофазные асинхронные двигатели переменного тока
Трехфазные двигатели по своей природе создают вращающееся магнитное поле. Однако, когда доступна только однофазная мощность, вращающееся магнитное поле должно создаваться другими способами. Обычно используются несколько методов.
Обычным однофазным двигателем является двигатель с расщепленными полюсами, который используется в устройствах, требующих низкого крутящего момента, таких как электрические вентиляторы или другие небольшие бытовые приборы.В этом двигателе небольшие одновитковые медные «затеняющие катушки» создают движущееся магнитное поле. Часть каждого полюса окружена медной катушкой или лентой; индуцированный ток в перемычке противодействует изменению потока через катушку (закон Ленца), так что максимальная напряженность поля перемещается через поверхность полюса в каждом цикле, создавая необходимое вращающееся магнитное поле.
Другой распространенный однофазный двигатель переменного тока — это асинхронный двигатель с расщепленной фазой , обычно используемый в основных бытовых приборах, таких как стиральные машины и сушилки для одежды.По сравнению с двигателями с экранированными полюсами эти двигатели обычно могут обеспечивать гораздо больший пусковой крутящий момент за счет использования специальной пусковой обмотки в сочетании с центробежным переключателем.
В двигателе с расщепленной фазой пусковая обмотка спроектирована с более высоким сопротивлением, чем рабочая обмотка. Это создает цепь LR, которая немного сдвигает фазу тока в пусковой обмотке. Когда двигатель запускается, пусковая обмотка подключается к источнику питания через набор подпружиненных контактов, на которые нажимает еще не вращающийся центробежный переключатель.Пусковая обмотка намотана с меньшим количеством витков провода меньшего диаметра, чем основная обмотка, поэтому она имеет меньшую индуктивность (L) и более высокое сопротивление (R). Более низкое отношение L / R создает небольшой фазовый сдвиг, не более примерно 30 градусов, между потоком, обусловленным основной обмоткой, и потоком пусковой обмотки. Начальное направление вращения можно изменить на обратное, просто поменяв местами соединения пусковой обмотки относительно работающей обмотки.
Фаза магнитного поля в этой пусковой обмотке смещена от фазы сетевого питания, что позволяет создать движущееся магнитное поле, которое запускает двигатель.Когда двигатель достигает скорости, близкой к расчетной, срабатывает центробежный выключатель, размыкая контакты и отсоединяя пусковую обмотку от источника питания. Тогда двигатель работает только на ходовой обмотке. Пусковую обмотку необходимо отключить, так как это приведет к увеличению потерь в двигателе.
В конденсаторном пусковом двигателе пусковой конденсатор вставлен последовательно с пусковой обмоткой, создавая LC-цепь, способную к гораздо большему фазовому сдвигу (и, следовательно, гораздо большему пусковому крутящему моменту).Конденсатор, естественно, увеличивает стоимость таких двигателей.
Другой вариант — двигатель с постоянным разделенным конденсатором (PSC) (также известный как конденсаторный двигатель запуска и запуска). Этот двигатель работает аналогично двигателю с конденсаторным пуском, описанному выше, но здесь нет переключателя центробежного пуска, а вторая обмотка постоянно подключена к источнику питания. Двигатели PSC часто используются в кондиционерах, вентиляторах и воздуходувках, а также в других случаях, когда требуется регулируемая скорость. Изменяя ответвления на ходовой обмотке, но сохраняя постоянную нагрузку, двигатель можно заставить работать с разными скоростями.Также при условии, что все 6 соединений обмоток доступны по отдельности, трехфазный двигатель может быть преобразован в двигатель для запуска и запуска конденсатора путем объединения двух обмоток и подключения третьей через конденсатор, который будет действовать как пусковая обмотка.
Отталкивающие двигатели — однофазные двигатели переменного тока с фазным ротором, аналогичные универсальным двигателям. В отталкивающем двигателе щетки якоря закорочены вместе, а не соединены последовательно с полем. Было произведено несколько типов отталкивающих двигателей, но наиболее часто использовался асинхронный двигатель с отталкивающим пуском (RS-IR).Двигатель RS-IR оснащен центробежным переключателем, который замыкает все сегменты коммутатора, так что двигатель работает как асинхронный после разгона до полной скорости. Двигатели RS-IR используются для обеспечения высокого пускового момента на ампер в условиях низких рабочих температур и плохого регулирования напряжения источника. По состоянию на 2006 год продано немного отталкивающих двигателей любого типа.
Однофазные синхронные двигатели переменного тока
Небольшие однофазные двигатели переменного тока также могут быть спроектированы с намагниченными роторами (или несколькими вариантами этой идеи).Роторы в этих двигателях не требуют индуцированного тока, поэтому они не скользят назад против частоты сети. Вместо этого они вращаются синхронно с частотой сети. Из-за высокой точности скорости такие двигатели обычно используются для питания механических часов, проигрывателей виниловых дисков и ленточных накопителей; раньше они также широко использовались в приборах точного времени, таких как ленточные самописцы или механизмы привода телескопов. Синхронный двигатель с расщепленными полюсами — это одна из версий.
Поскольку инерция затрудняет мгновенный разгон ротора с остановленной до синхронной скорости, этим двигателям обычно требуется какая-то специальная функция для запуска.В различных конструкциях используется небольшой асинхронный двигатель (который может использовать те же катушки возбуждения и ротор, что и синхронный двигатель) или очень легкий ротор с односторонним механизмом (чтобы гарантировать, что ротор запускается в «прямом» направлении).
Моментные двигатели
Моментный двигатель — это особый вид асинхронного двигателя, который может работать неограниченное время при остановке (с заблокированным от вращения ротором) без повреждений. В этом режиме двигатель будет прикладывать постоянный крутящий момент к нагрузке (отсюда и название).Обычное применение моментного двигателя — это двигатели подающей и приемной катушек в ленточном накопителе. В этом приложении, приводимые в действие низким напряжением, характеристики этих двигателей позволяют приложить относительно постоянное легкое натяжение к ленте, независимо от того, протягивает ли ведущая лента мимо головок ленты. Управляемые более высоким напряжением (и, следовательно, обеспечивающие более высокий крутящий момент), моментные двигатели также могут работать в режиме быстрой перемотки вперед и назад, не требуя каких-либо дополнительных механизмов, таких как шестерни или муфты.
Шаговые двигатели
- Основная статья: Шаговый двигатель
По конструкции тесно связаны с трехфазными синхронными двигателями переменного тока шаговые двигатели, в которых внутренний ротор, содержащий постоянные магниты или большой железный сердечник с выступающими полюсами, управляется набором внешних магнитов, которые переключаются электронно. Шаговый двигатель также можно рассматривать как нечто среднее между электродвигателем постоянного тока и соленоидом. Поскольку каждая катушка поочередно получает питание, ротор выравнивается с магнитным полем, создаваемым обмоткой возбуждения под напряжением.В отличие от синхронного двигателя, в его применении двигатель не может вращаться непрерывно; вместо этого он «шагает» из одного положения в другое по мере того, как обмотки возбуждения последовательно включаются и отключаются. В зависимости от последовательности ротор может вращаться вперед или назад.
Простые драйверы шаговых двигателей полностью включают или полностью обесточивают обмотки возбуждения, приводя ротор к «зубчатой передаче» в ограниченное количество положений; более сложные драйверы могут пропорционально управлять мощностью обмоток возбуждения, позволяя роторам располагаться «между» точками «шестеренки» и, таким образом, вращаться чрезвычайно плавно.Шаговые двигатели с компьютерным управлением — одна из самых универсальных форм систем позиционирования, особенно когда они являются частью цифровой системы с сервоуправлением.
Шаговые двигателиможно легко поворачивать на определенный угол, и, следовательно, шаговые двигатели используются в компьютерных дисководах, где высокая точность, которую они предлагают, необходима для правильного функционирования, например, жесткого диска или привода компакт-дисков.
Бесщеточные двигатели постоянного тока
- Основная статья: Бесщеточный электродвигатель постоянного тока
Многие ограничения классического коллекторного двигателя постоянного тока связаны с необходимостью прижимания щеток к коммутатору.Это создает трение. На более высоких скоростях щеткам становится все труднее поддерживать контакт. Щетки могут отскакивать от неровностей на поверхности коллектора, создавая искры. Это ограничивает максимальную скорость машины. Плотность тока на единицу площади щеток ограничивает мощность двигателя. Неидеальный электрический контакт также вызывает электрические помехи. Щетки со временем изнашиваются и требуют замены, а сам коллектор подлежит износу и техническому обслуживанию. Сборка коммутатора на большой машине — дорогостоящий элемент, требующий точной сборки многих деталей.
Эти проблемы устранены в бесщеточном двигателе. В этом двигателе механический «вращающийся переключатель» или узел коммутатора / щеточного устройства заменен внешним электронным переключателем, синхронизированным с положением двигателя. Бесщеточные двигатели обычно имеют КПД 85-90%, тогда как двигатели постоянного тока с щеткой обычно имеют КПД 75-80%.
На полпути между обычными двигателями постоянного тока и шаговыми двигателями находится область бесщеточных двигателей постоянного тока. Построенные аналогично шаговым двигателям, они часто используют внешний ротор с постоянным магнитом , три фазы управляющих катушек, одно или несколько устройств на эффекте Холла для определения положения ротора и соответствующую приводную электронику.Катушки активируются, одна фаза за другой, электроникой привода в соответствии с сигналами от датчиков эффекта Холла. По сути, они действуют как трехфазные синхронные двигатели, содержащие собственную электронику частотно-регулируемого привода. В специализированном классе контроллеров бесщеточных двигателей постоянного тока для определения положения и скорости используется обратная связь по ЭДС через основные фазовые соединения вместо датчиков Холла. Эти двигатели широко используются в электромобилях с радиоуправлением.
Бесщеточные двигатели постоянного токаобычно используются там, где требуется точное управление скоростью, в дисководах компьютеров или в кассетных видеомагнитофонах, когда шпиндели на компакт-дисках, компакт-дисках (и т. Д.)) приводы и механизмы в офисных продуктах, таких как вентиляторы, лазерные принтеры и копировальные аппараты. Они имеют ряд преимуществ перед обычными двигателями:
- По сравнению с вентиляторами переменного тока, использующими электродвигатели с экранированными полюсами, они очень эффективны и работают намного холоднее, чем эквивалентные электродвигатели переменного тока. Такой холодный режим работы приводит к значительному увеличению срока службы подшипников вентилятора.
- Без изнашиваемого коммутатора срок службы бесщеточного двигателя постоянного тока может быть значительно больше по сравнению с двигателем постоянного тока, использующим щетки и коммутатор.Коммутация также имеет тенденцию вызывать большое количество электрических и радиочастотных помех; без переключателя или щеток бесщеточный двигатель может использоваться в электрически чувствительных устройствах, таких как аудиооборудование или компьютеры.
- Те же устройства на эффекте Холла, которые обеспечивают коммутацию, могут также обеспечивать удобный сигнал тахометра для приложений с замкнутым контуром (сервоуправлением). В вентиляторах сигнал тахометра может использоваться для получения сигнала «вентилятор исправен».
- Двигатель можно легко синхронизировать с внутренними или внешними часами, что позволяет точно регулировать скорость.
- Щеточные двигатели нельзя использовать в космическом вакууме, потому что они привариваются к неподвижному положению.
Современные бесщеточные двигатели постоянного тока имеют мощность от долей ватта до многих киловатт. В электромобилях используются более мощные бесщеточные двигатели мощностью до 100 кВт. Они также находят значительное применение в высокопроизводительных электрических моделях самолетов.
Двигатели постоянного тока без сердечника
Ничто в конструкции любого из описанных выше двигателей не требует, чтобы железные (стальные) части ротора действительно вращались; крутящий момент действует только на обмотки электромагнитов.Этим фактом пользуется бесщеточный электродвигатель постоянного тока , специализированная форма щеточного электродвигателя постоянного тока. Эти двигатели, оптимизированные для быстрого разгона, имеют ротор без железного сердечника. Ротор может иметь форму заполненного обмоткой цилиндра внутри магнитов статора, корзины, окружающей магниты статора, или плоского блина (возможно, сформированного на печатной монтажной плате), проходящего между верхним и нижним магнитами статора. Обмотки обычно стабилизируются путем пропитки эпоксидной смолой.
Поскольку ротор намного легче по весу (массе), чем обычный ротор, сформированный из медных обмоток на стальных пластинах, ротор может ускоряться намного быстрее, часто достигая механической постоянной времени менее 1 мс. Это особенно верно, если в обмотках используется алюминий, а не более тяжелая медь. Но поскольку в роторе нет металлической массы, которая могла бы служить радиатором, даже небольшие двигатели без сердечника часто должны охлаждаться принудительным воздухом.
Эти двигатели обычно использовались для привода приводов магнитных лентопротяжных устройств и до сих пор широко используются в высокопроизводительных системах с сервоуправлением.
Двигатели линейные
Линейный двигатель — это, по сути, электродвигатель, который был «раскручен» так, что вместо создания крутящего момента (вращения) он создает линейную силу по всей своей длине, создавая бегущее электромагнитное поле.
Линейные двигатели чаще всего представляют собой асинхронные двигатели или шаговые двигатели. Вы можете найти линейный двигатель в поезде на магнитной подвеске (Transrapid), где поезд «летит» над землей.
Нано мотор
Наномотор, сконструированный Калифорнийским университетом в Беркли.Диаметр двигателя составляет около 500 нм: в 300 раз меньше диаметра человеческого волоса.Исследователи из Калифорнийского университета в Беркли разработали подшипники вращения на основе многослойных углеродных нанотрубок. Прикрепив золотую пластину (размером порядка 100 нм) к внешней оболочке подвешенной многослойной углеродной нанотрубки (например, вложенных углеродных цилиндров), они могут электростатически вращать внешнюю оболочку относительно внутреннего ядра. Эти подшипники очень прочные; Устройства колебались тысячи раз без признаков износа.Работа была сделана на месте в SEM. Эти наноэлектромеханические системы (НЭМС) являются следующим шагом в миниатюризации, которая в будущем может найти свое применение в коммерческих целях.
Примечание: тонкая вертикальная нить посередине — это нанотрубка, к которой прикреплен ротор. Когда внешняя трубка разрезана, ротор может свободно вращаться на подшипнике из нанотрубок.
На этом рендере можно увидеть процесс и технологию.
См. Также
Компоненты:
Ученые и инженеры:
Заявки:
Другое:
Внешние ссылки
Учебники
- Шейнфилд Д.J., Industrial Electronics for Engineers, Chemists, and Technician, William Andrew Publishing, Norwich, NY, 2001. Самоучитель, в котором кратко рассматриваются электродвигатели, трансформаторы, регуляторы скорости, коды проводки и заземление, транзисторы, цифровые, и т. д. Легко читать и понимать, вплоть до элементарного уровня по каждому предмету, не подходящий справочник для технологов, уже работающих в любой из этих областей.
- Fitzgerald / Kingsley / Kusko (Fitzgerald / Kingsley / Umans в более поздние годы), * Electric Machinery , классический текст для младших и старших студентов-электриков.Первоначально опубликовано в 1952 году, 6-е издание опубликовано в 2002 году. Авторы по-прежнему указаны как Фицджеральд / Кингсли / Уманс, хотя Фицджеральд и Кингсли уже скончались.
- Bedford, B.D .; Hoft, R.G. и др. (1964). Принципы инверторных схем . Нью-Йорк: John Wiley & Sons, Inc .. 0 471 06134 4. (цепи инвертора используются для управления скоростью двигателя с переменной частотой)
- Б. Р. Пелли, «Тиристорные преобразователи с фазовым управлением и циклоконвертеры: работа, управление и производительность» (Нью-Йорк: Джон Вили, 1971).
Список литературы
- Дональд Г. Финк и Х. Уэйн Бити, Стандартное руководство для инженеров-электриков , одиннадцатое издание , МакГроу-Хилл, Нью-Йорк, 1978, ISBN 007020974X.
- Эдвин Дж. Хьюстон и Артур Кеннелли, Последние типы динамо-электрических машин , авторское право American Technical Book Company 1897, опубликовано P.F. Кольер и сыновья Нью-Йорк, 1902
- Купхальдт, Тони Р. (2000-2006). «Глава 13 ДВИГАТЕЛИ ПЕРЕМЕННОГО ТОКА», Уроки электрических цепей — Том II .Проверено 11 апреля 2006.
- А. О. Смит: переменного и постоянного тока электродвигателей. Проверено 11 апреля 2006.
Электродвигатели — Restarters Wiki
На этой странице рассказывается об электродвигателях различных типов, а также о том, как их идентифицировать и понимать их общие виды отказов, а также как их тестировать.
Сводка
Многие устройства и приборы содержат электродвигатели. Эта страница поможет вам понять, как они работают, что может пойти не так и, возможно, как их исправить.
Безопасность
-
- Двигатели в бытовых приборах могут быть довольно мощными и вместе с соответствующими шестернями и механизмами могут вызывать травмы. Как и все сетевые электроприборы, перед началом работы обязательно отключите их от сети. Прибор должен пройти испытание PAT как до, так и после попытки разборки или ремонта.
Типы двигателей
Существует много типов электродвигателей, но почти все они делятся на три основных типа.Все они состоят из двух основных компонентов:
- Ротор — бит, который вращается, и
- Статор — бит, который не вращается.
Все они полагаются на электромагнетизм . Когда электрический ток течет через катушку с проволокой, он создает магнитное поле. Катушка обычно наматывается на железный сердечник, который затем намагничивается, что значительно увеличивает магнетизм.
Двигатели постоянного тока и универсальные (переменного / постоянного тока)
Мотор универсальный, в разобранном виде. Универсальный двигатель с ротором и коммутатором.Универсальный двигатель, показывающий статор со щетками на дальнем конце.Статор представляет собой постоянный магнит или электромагнит.
В простейших игрушечных двигателях ротор представляет собой другую катушку или целый ряд катушек во всех реальных двигателях, намотанных на многослойный железный сердечник.
Пара угольных щеток подает ток на ротор через коммутатор , который постоянно переключает ток в роторе на те катушки, которые находятся под прямым углом к катушке статора в любой данный момент.Это создает постоянное вращающее усилие.
В электродвигателях с электронной коммутацией или бесщеточных ротор часто представляет собой постоянный магнит. Электронные схемы определяют положение ротора и постоянно переключают ток в серии катушек статора, чтобы вращать ротор. Это устраняет необходимость в электрическом подключении к ротору и, таким образом, повышает надежность.
Двигатели постоянного тока и универсальные двигатели работают одинаково хорошо, как динамо-машины, и генерируют напряжение, противоположное приложенному напряжению.Это известно как «обратная ЭДС (электродвижущая сила)». При небольшой нагрузке эти двигатели разгоняются до тех пор, пока не будут генерировать почти столько же напряжения, сколько приложено. Следовательно, легко изменять скорость, просто изменяя приложенное напряжение.
Коллектор и щетки (кроме двигателей с электрической коммутацией) подвержены износу и могут образовывать искры. Поэтому такие двигатели не используются там, где требуется высочайшая надежность или существует риск возгорания или взрыва из-за горючих газов.
Динамо-эффект минимален при первом запуске двигателя и до того, как он достигнет полной скорости. Это позволяет двигателю потреблять сильный ток и генерировать очень большой пусковой момент (то есть вращающее усилие). Это особенно полезно в электромобилях и поездах, где требуется мощная сила для первоначального приведения их в движение.
Двигатель без сердечника — ротор и корпус с постоянным магнитом, видимым внутри корпуса.В двигателе без сердечника обмотки ротора сформированы в полый цилиндр, связанный смолой — железного сердечника нет.Он вращается вокруг статического постоянного магнита, расположенного внутри него. Магнитное поле проходит от одного полюса магнита через обмотки ротора и затем возвращается через стальной корпус двигателя, снова через противоположную сторону ротора и, следовательно, обратно к другому полюсу магнита.
Двигатель без сердечника — Коммутатор и щетки.Ток подается на ротор через щетки и коммутатор, как и в любом другом двигателе постоянного тока или универсальном двигателе. Отсутствие железного сердечника повышает эффективность, снижает вес и снижает инерцию, обеспечивая очень быстрое ускорение и замедление.
Двигатели без сердечника часто используются в небольших квадрокоптерах и других игрушках, а также в медицинском оборудовании, робототехнике и везде, где требуется небольшой высокоэффективный и отзывчивый двигатель.
В большинстве ручных электроинструментов используются универсальные двигатели. Компьютерные вентиляторы, двигатели с жесткими дисками и более крупные модели квадрокоптеров и пультов дистанционного управления обычно используют двигатели с электронной коммутацией.
Есть отличная статья с видео, описывающим и демонстрирующим, как работает двигатель постоянного тока.
Асинхронные двигатели
Они проще по конструкции, но их не так легко понять.
Если вы перемещаете магнит по куску металла, движущееся магнитное поле генерирует циркулирующий электрический ток в металле. Этот ток, в свою очередь, создает магнитное поле, которое взаимодействует с приложенным полем таким образом, что создает сопротивление, препятствующее движению.
Небольшой асинхронный двигатель с экранированными полюсами в разобранном виде.Статор состоит из двух или более катушек, созданных для создания вращающегося магнитного поля.Ротор содержит несколько толстых медных петель для максимального сопротивления, создаваемого вращающимся магнитным полем. Ротор ускоряется до тех пор, пока не начинает вращаться почти так же быстро, как вращающееся магнитное поле.
Асинхронные двигатели работают только от источника переменного тока (который меняет направление 100 раз в секунду), так как именно так статор может создавать вращающееся магнитное поле.
Поскольку частота источника переменного тока фиксирована, вы не можете легко изменить скорость асинхронного двигателя. Однако с 4 или 6 (или более) обмотками статора вместо 2 и путем переключения способа подачи питания переменного тока на них можно настроить вращающееся магнитное поле, чтобы вращаться на половину, треть (или другое дробное значение). скорость.
В большинстве асинхронных двигателей статор создает больше восходящего и опускающегося магнитного поля, чем истинное вращающееся магнитное поле, но с небольшим скручиванием в одну сторону при движении вверх и в другую при движении вниз. Это означает, что пусковой момент низкий. Следовательно, они обычно используются там, где это не имеет значения, например в вентиляторе, который испытывает небольшое сопротивление воздуха, пока не наберет полную скорость.
Асинхронный двигатель со стартерной обмоткой.Есть несколько способов получения скрутки. В двигателе с экранированными полюсами толстая медная петля намотана вокруг части каждого полюса (как видно на первой фотографии).Это приводит к некоторой задержке намагничивания этой части полюса из-за нарастания тока в контуре, что дает необходимое скручивание. Медный контур расходует энергию, поэтому этот метод используется только в небольших двигателях, которые очень часто встречаются в настольных вентиляторах.
Двигатели большего размера имеют смещение второй обмотки статора относительно основной, на которую подается противофазный ток. Конденсатор (большой цилиндрический компонент, который нельзя не заметить) или иногда резистор обеспечивает фазовый сдвиг.На рисунке показан пример двигателя ротационной газонокосилки, на котором хорошо видна вторая обмотка, смещенная на 90 градусов.
(Интересной особенностью показанного двигателя является то, что он имел тормозной механизм, чтобы остановить вращение лезвия после отключения питания. На шпинделе виден металлический диск с пружиной под ним, которая прижимала его к трем видимым тормозным колодкам. вокруг подшипника.При подаче питания магнитное поле тянет этот диск вниз и от тормозных колодок.Корозия диска привела к тому, что тормозное действие стало чрезмерно сильным.Затем плоские поверхности на шпинделе стерли соответствующие плоские поверхности на пластиковом колесе, к которому было прикреплено лезвие. Из-за углового момента лезвия его стопорный болт ослаб.)
Вторая обмотка статора может терять энергию после запуска двигателя и, следовательно, может быть отключена центробежным переключателем. В качестве альтернативы может быть термистор, который быстро нагревается при протекании тока, и при этом его сопротивление увеличивается, что снижает ток во второй обмотке статора.
Большие промышленные асинхронные двигатели мощностью несколько лошадиных сил часто получают питание от трехфазного источника питания. С 3 обмотками (или кратными 3), питаемыми от 3 фаз, они естественным образом создают вращающееся магнитное поле и, таким образом, самозапускаются.
Есть отличная статья с видео, описывающим и объясняющим, как работают асинхронные двигатели.
Синхронные двигатели
Они похожи на асинхронные двигатели тем, что статор создает вращающееся магнитное поле. Разница в том, что ротор представляет собой постоянный магнит и, следовательно, вынужден вращаться с той же скоростью, что и магнитное поле, вместо того, чтобы отставать по скорости, как в асинхронном двигателе.
Представьте себе две жестяные банки, одну внутри другой. Если вы заполните пространство между ними патокой и поверните внешнюю банку, она потянет за собой внутреннюю, даже если вы будете сопротивляться ее движению. Разница в скорости будет зависеть от применяемого вами сопротивления. Это похоже на асинхронный двигатель. Если вместо патоки вы прикрепите внутреннюю банку к внешней с помощью пружин, внутренняя банка будет вынуждена вращаться с той же скоростью, но будет растягивать пружины и отставать в своем положении, хотя и не по скорости, по мере увеличения сопротивления.Это похоже на синхронный двигатель.
Маленькие синхронные двигатели используются в электромеханических таймерах и часах, где их вращение привязано к частоте сети переменного тока. Крупные промышленные предприятия также иногда используют гораздо более крупные и мощные синхронные двигатели. Автомобильный генератор переменного тока и генераторы на электростанции — это синхронные двигатели, используемые в качестве генераторов.
Поскольку синхронный двигатель не работает должным образом, пока ротор не наберет нужную скорость, необходимо применить некоторые хитрые средства, чтобы запустить его.В небольших часовых и таймерных двигателях это обычно достигается за счет формы железа статора. По мере того, как магнитное поле от катушки статора меняет направление на противоположное с каждым циклом подачи переменного тока, изменение магнетизма постепенно распространяется через железо особой формы таким образом, что оно скручивается.
Бесщеточный двигатель — это фактически просто синхронный двигатель, приводимый в действие электронной схемой для управления обмотками статора и, таким образом, создания вращающегося магнитного поля.
Шаговые двигатели
Часто требуется двигатель, которому вместо непрерывного вращения можно дать команду на вращение на заранее определенную величину и остановку.Примером может служить двигатель, который приводит в движение ролики подачи бумаги в принтере. Они должны продвигать бумагу на ширину печатающей головки и останавливаться после печати каждого ряда пикселей. Аналогичным образом, аналоговые кварцевые часы или часы обычно включают секундную стрелку на секунду каждую секунду. В обоих случаях используются шаговые двигатели.
Существуют разные конфигурации, но самая простая и легкая для понимания состоит из статора, состоящего из двух катушек, расположенных под прямым углом, и ротора с постоянным магнитом внутри них.Первоначально одна катушка находится под напряжением, и постоянный магнит выравнивается с ее магнитным полем. Если другая катушка также находится под напряжением, магнит повернется на 45 градусов в положение между ними и завершит поворот на 90 градусов, когда первая катушка выключится. Повторное включение первой катушки в противоположном направлении приведет к тому, что ротор продолжит движение еще на 45 градусов и так далее. Таким образом, вал, прикрепленный к постоянному магниту, можно поворачивать на 45 градусов за раз по мере необходимости. Путем изменения последовательности его можно повернуть в обратном направлении, если это необходимо.
Диагностика и ремонт
Все типы двигателей могут заклинивать, если подшипники забиваются грязью или пылью, что легко может произойти в электроинструментах. Бритвы, электрические зубные щетки и кухонные приборы могут заклинивать из-за попадания воды и т. Д. Очистка может быть всем, что требуется, но в случае воды предотвратить повторение того же может быть непросто. Выясните, доступны ли запасные уплотнения. Застрявший подшипник часто можно освободить с помощью WD40, а дорожку качения, забитую пылью, можно очистить уайт-спиритом, но в любом случае важно смазать подходящим маслом или консистентной смазкой после очистки и высыхания, поскольку ни WD40, ни уайт-спирит не подходят. хорошие смазки.
Маленькие двигатели, рассчитанные на работу от батарей, часто не предназначены для разборки, хотя это можно сделать, согнув фиксирующие их выступы. Более крупные, например, предназначенные для работы от сети, часто можно разобрать, удалив два длинных болта, проходящих по всей их длине. В случае двигателей постоянного тока и универсальных двигателей при повторной сборке вам нужно будет снять щетки или удерживать их в стороне, чтобы задвинуть ротор на место с коллектором между ними.
В случае заклинивания двигатель потребляет сильный ток. Он сконструирован так, чтобы делать это мгновенно при запуске, но если его не повернуть, он может перегреться и повредить изоляцию, а в худшем случае — сжечь обмотки. Запах гари является явным признаком неисправности, а поврежденная изоляция может привести к нестабильной скорости. Если есть признаки ухудшения изоляции, двигатель следует утилизировать. (Специализированные фирмы перематывают большие промышленные двигатели, но вряд ли это будет рентабельным для отечественного двигателя и простой задачей, которую можно решить самостоятельно.)
При отсутствии видимых признаков износа стоит проверить обмотки мультиметром в диапазоне сопротивлений. Низкое показание является нормальным, поскольку приложенное напряжение ограничивается не сопротивлением обмоток, а динамо-эффектом, который всегда ему противодействует.
Распространенной неисправностью двигателей постоянного тока и универсальных двигателей является износ угольных щеток, контактирующих с коллектором, или грязный коллектор. Чрезмерное искрение — верный признак того, что требуется срочное обслуживание.Щетки обычно прижимаются к коммутатору с помощью пружины, но они могут перестать поддерживать хороший контакт, если они изнашиваются сразу или если они не могут соскользнуть в их корпусах по мере износа. Можно получить замену, но вам нужно будет тщательно выбрать правильный размер. Замены могут быть доступны для вашей конкретной марки и модели устройства, в противном случае тщательно измерьте старые щетки и их корпус, и вы сможете найти подходящие замены в Интернете. Если щетка изнашивается вплоть до пружины, искрение может необратимо повредить коммутатор.
В некоторых профессиональных и высококачественных электроинструментах для дома есть щетки, в которые вставлен подпружиненный пластиковый штифт. Когда уголь изнашивается до предела, штифт освобождается, отталкивая изношенную щетку от коллектора, чтобы предотвратить дальнейший износ и необратимые повреждения. Известно, что профессионалы выбрасывают дорогие электроинструменты, которые внезапно перестали работать по этой причине — это простое решение, если вы можете распознать проблему.
Асинхронные двигатели с экранированными полюсами обычно очень надежны, но конденсаторные, термисторные и центробежные механизмы запуска могут выйти из строя.Если есть конденсатор, он может показать явные признаки неисправности, в противном случае проверьте его, если сможете. По крайней мере, вы можете использовать мультиметр на диапазоне сопротивления, чтобы проверить, что он не закорочен.
Электродвигатель содержит много меди и железа — убедитесь, что вы утилизируете его ответственно!
Электродвигатель — Физика — Metropolia Confluence
Сначала мы должны были подумать о действительно важной технологии, касающейся человечества. Мы подумали о генераторе, поскольку это почти единственный источник электроэнергии.Генератор уже был взят, поэтому мы подумали о другом изобретении, которое имеет большое влияние на нашу повседневную жизнь. Двигатель внутреннего сгорания был одним из изобретений, которое пришло нам в голову, но мы думали, что он на самом деле не так уж хорош, потому что он использует ископаемые источники энергии и однажды он устареет. Мы решили выбрать электродвигатель, потому что он использует электричество для преобразования ее в кинетическую энергию. Электроэнергия может производиться экологически безопасными методами, и поэтому в будущем будут выбраны электродвигатели.
Почему это так важно? Большинство инноваций в области электричества осуществляется с помощью электродвигателей, и в настоящее время электричество используется повсеместно. Моторы очень гибкие, особенно в отношении размеров двигателя. Мы не могли представить себе двигатель внутреннего сгорания, который поместился бы в вашем кармане, но есть действительно небольшие электродвигатели. Электричество (топливо для двигателя) легко транспортировать, а сами электродвигатели практически не загрязняют окружающую среду.
Теория
Нашей следующей задачей было подумать о физике изобретения и применения электродвигателя. 2
КПД электродвигателя
μ = 746 Php / Pinput_w, где
μ = КПД
Php = выходная мощность (л.с.)
Pinput_w = входная электрическая мощность (Вт)
Электродвигатель — мощность
P3-phase = (V I PF 1.732) / 1000
, где P3-фаза = электрическая мощность 3-фазного двигателя (кВт)
Электродвигатель — Ампер
I3-фаза = (746 Php) / (1,732 В μ PF) (7)
где I3 -phase = электрический ток 3-фазный двигатель (амперы)
Поиск информации был самым интересным, потому что на этом этапе мы решили создать собственный электродвигатель. Мы сделали это решение, исходя из того, что есть много надежных источников, где мы могли бы найти информацию об электродвигателях, и мы фактически уже нашли некоторые базовые модели.Мы перечислили несколько ссылок из Интернета, которые использовали для получения информации. Все ссылки казались действительно надежными, в том числе потому, что мы можем проверять их критически здравым смыслом.
Итак, мы выяснили, что основная основная функция электродвигателя заключается в том, что он основан как минимум на двух магнитах, которые создают вращательное движение. Суть электродвигателя — это электромагнит. Это важно, потому что для создания вращательного движения полярность магнита должна быть изменена в нужное время.Это будет поддерживать движение. Движение основано на магнетизме. Северный и южный полюса имеют тенденцию притягиваться друг к другу, а южный и южный или северный и северный полюса, с другой стороны, имеют тенденцию отталкиваться друг от друга. Таким образом, когда электромагнит подключается к батарее, он становится поляризованным и, таким образом, на него воздействует либо сила отталкивания, либо сила притяжения. Он развернется на пол-оборота вокруг оси и остановится. Теперь дело в том, чтобы изменить полярность электромагнита непосредственно перед его остановкой, чтобы он продолжил движение, но в другую сторону.Это создаст постоянное вращательное движение, обычное для двигателя. Есть и другие применения, особенно количество полюсов может варьироваться в зависимости от типа двигателя.
На приведенном выше рисунке в двигателе есть два магнита: якорь (или ротор) представляет собой электромагнит, а полевой магнит — постоянный магнит (полевой магнит также может быть электромагнитом, но в большинстве небольших двигателей. это не для экономии энергии).
Вопросы об электродвигателях
Почему намотка влияет на направление вращения двигателя?
Не влияет на направление вращения.Единственное, что на него влияет, — это направление тока, приложенного к катушке. Вы можете повлиять на результат работы электродвигателя, используя различные методы намотки.
Результаты моделирования показывают, что метод намотки не влияет на распределение электромагнитного поля. Однако он способен влиять на величину магнитного поля и индуцированного тока. В трех методах намотки (обмотка соленоида, обмотка катушки-блинчика и многослойная намотка) обмотка катушки-блинчика заставляет катушку производить самую большую плотность магнитного потока и плотность тока.Затухание магнитного поля катушки в обмотке катушки-блинчика самое медленное. (Влияние различных методов намотки катушки на электромагнитное поле во время транскраниальной магнитной стимуляции. Шо Ян, Гуйчжи Сю, Лэй Ван и Сю Чжан)
Какие части электродвигателя используются чаще всего?
| — Статор | — Ротор |
| — Катушки (якорь) | — Коммутатор |
| — Ось | — Щетки |
Какие разные электродвигатели есть?
Электродвигатели работают на трех различных физических принципах: магнитном, электростатическом и пьезоэлектрическом.Чаще всего в электродвигателях используется магнитный принцип. Магнитные поля формируются ротором и статором в магнитных двигателях. Продукт между этими двумя полями создает силу и, следовательно, крутящий момент на валу двигателя. Одно или оба этих поля должны изменяться при вращении двигателя. Это делается путем включения и выключения шестов в нужное время или изменения силы шеста. Основными типами являются двигатели постоянного и переменного тока, причем первые все чаще вытесняются вторыми.Электродвигатели переменного тока бывают асинхронными или синхронными. После запуска синхронному двигателю требуется синхронизация с синхронной скоростью движущегося магнитного поля для всех нормальных условий крутящего момента. В синхронных машинах магнитное поле должно создаваться средствами, отличными от индукции, такими как отдельно возбужденные обмотки или постоянные магниты. Принято различать номинальную выходную мощность двигателей относительно порогового значения единичной мощности, так что интегральная мощность относится к двигателям, равным или превышающим, а дробная мощность (FHP) относится к двигателям ниже порогового значения.
Электромагнитная энергия для материи
Энергия как концепция очень нематериальна. В физике энергия — это способность выполнять работу или вызывать изменения в материи. Это приводит нас к выводу, что энергия передается в основном для изменения самой материи или для создания какого-либо движения (движение может быть небольшим, быстрым или даже невидимым).
Передача энергии происходит по крайней мере между двумя системами, когда некоторое количество энергии пересекает границу между системами.Это вызовет потерю энергии по крайней мере в одной системе и увеличение энергии в другой (ах). В этой транзакции всегда сохраняется количество энергии, и количество потерь для проигрывающих систем равно количеству увеличения для других систем. Энергия — это то, что не может быть создано или уничтожено (насколько нам известно), а просто преобразовано из одной формы в другую.
Электродвигатель — это, по сути, машина, которая выполняет только одну работу. Для преобразования электрической энергии в механическую.В этом изобретении электрическая энергия заставляет материю двигаться. Основная функция электродвигателя заключается в том, что он основан как минимум на двух магнитах, которые создают вращательное движение. Суть электродвигателя — это электромагнит. Электромагнит — это то, что получает электрическую энергию. Это важно, потому что для создания вращательного движения полярность магнита должна быть изменена в нужное время. Это будет поддерживать движение. Движение основано на магнетизме. Устройство использует электромагнитные (или магнитные) силы для преобразования энергии в механическую.Северный и южный полюса имеют тенденцию притягиваться друг к другу, а южный и южный или северный и северный полюса, с другой стороны, имеют тенденцию отталкиваться друг от друга. Таким образом, когда электромагнит подключается к батарее с зарядом (источником энергии), он поляризуется и, таким образом, подвергается воздействию либо силы отталкивания, либо силы притяжения. Он развернется на пол-оборота вокруг оси и остановится. Теперь дело в том, чтобы изменить полярность электромагнита непосредственно перед его остановкой. Обычно это делается с помощью коммутаторов. Так он будет продолжать движение, но в другую сторону.Он будет создавать непрерывное вращательное движение, характерное для любого типа двигателя. Есть и другие применения, особенно количество полюсов и магнитов может варьироваться в зависимости от типа двигателя.
Почему фотоны не видны в электродвигателе?
Фотон — это калибровочный бозон, который представляет собой бозонную частицу. Современная концепция фотонов была разработана Альбертом Эйнштейном. Калибровочные бозоны несут любые фундаментальные взаимодействия природы. Фотон несет электромагнитное взаимодействие.Все взаимодействия природы переносятся калибровочными бозонами, кроме гравитации (см. Теорию гравитона). Фотоны широко известны как квант света и все другие формы электромагнитного излучения. Квантовая теория предполагает, что энергия и материя квантованы. Квант — это минимальное количество любого физического объекта, участвующего во взаимодействии.
Электродвигатели, как упомянуто выше, основаны на магнитах и электричестве. Электричество — это в основном движение частиц с электрическим зарядом.В металлах (проволоках) этими частицами обычно являются электроны. В классической физике электромагнитные явления описываются уравнениями Максвелла. Максвелл утверждал, что электрический заряд всегда циркулирует с помощью электрического поля, а электрический ток всегда циркулирует с помощью магнитного поля. Максвелл сформировал свои уравнения, объединив и добавив законы Ампера, Гаусса и Фарадея. Согласно уравнениям Максвелла, электромагнитное излучение движется со скоростью света и поэтому на самом деле является формой света, или, точнее, свет является формой электромагнитного излучения.С другой стороны, электромагнитное излучение — это волны электромагнитного поля. Магнитные поля образуются из электромагнитного излучения. У магнитов есть магнитные поля, а также у электромагнитов есть электрические поля.
Теперь фотоны являются квантами электромагнитного излучения и носителями фундаментальных взаимодействий, называемых электромагнитными взаимодействиями. Фотоны — это частицы, которые вызывают возникновение электромагнитных полей. В электродвигателе фотоны сначала заставляют электроны двигаться (ток), а затем, пока электроны движутся, они создают магнитное поле.Когда магнитные поля взаимодействуют друг с другом, фотоны переносят между собой силу, заставляющую их двигаться. Фотоны не видны в электродвигателе из-за видимого спектра света. Электромагнитное излучение, используемое в нашем изобретении, не имеет видимых длин волн.
Что такое диски?
Основная статья: Что такое электроприводы
Основная функция привода — управлять потоком энергии из сети в технологический процесс. Энергия подается в процесс через ось двигателя.Есть две различные физические переменные для оси: крутящий момент и скорость. Чтобы контролировать поток энергии, необходимо контролировать эти количества. Термины для управления — это управление скоростью или управление крутящим моментом. Управление крутящим моментом или скоростью может быть достигнуто с помощью приводов с регулируемой скоростью (VSD), обычно в двигателях постоянного тока (также в двигателях переменного тока) и частотно-регулируемых приводах (VFD) в двигателях переменного тока. Когда приводы работают в режиме управления крутящим моментом, скорость определяется нагрузкой, а при работе в режиме управления скоростью крутящий момент определяется нагрузкой.VSD также можно использовать для преобразования механической энергии в машины. Двигателями постоянного тока гораздо проще управлять с помощью приводов. Существует почти бесконечное количество различных типов приводов, но основные функции описаны ниже.
- Как построить простой электродвигатель: 10 шагов (с изображениями). 2014. [ONLINE] Доступно по адресу: http://www.wikihow.com/Build-a-Simple-Electric-Motor. [Доступно 10 декабря 2014 г.].
-
Построить электродвигатель — YouTube. 2014. [ONLINE] Доступно по адресу: https: // www.youtube.com/watch?v=elFUJNodXps. [Доступно 10 декабря 2014 г.].
-
Электродвигатель просто сделать — YouTube. 2014 г. [ONLINE] Доступно по адресу: https://www.youtube.com/watch?v=WKklyuzghQg. [Доступно 10 декабря 2014 г.].
-
Создайте свой собственный двигатель | Электродвигатель | Ханская академия. 2014. [ONLINE] Доступно по адресу: https://www.khanacademy.org/science/discoveries-projects/discoveries/electric_motor/v/build-your-own-motor. [Доступно 10 декабря 2014 г.].
-
Как построить простой электродвигатель.2014. [ONLINE] Доступно по адресу: http://www.instructables.com/id/How-to-Build-a-Simple-Electric-Motor/. [Доступно 10 декабря 2014 г.].
-
Энергия — Википедия, бесплатная энциклопедия. 2014 г. [ONLINE] Доступно по адресу: http://en.wikipedia.org/wiki/Energy. [Доступно 10 декабря 2014 г.].
-
Круговое движение — Википедия, бесплатная энциклопедия. 2014 г. [ONLINE] Доступно по адресу: http://en.wikipedia.org/wiki/Circular_motion. [Доступно 10 декабря 2014 г.].
-
Ускорение — Википедия, бесплатная энциклопедия.2014 г. [ONLINE] Доступно по адресу: http://en.wikipedia.org/wiki/Acceleration. [Доступно 10 декабря 2014 г.].
-
Законы движения Ньютона — Википедия, бесплатная энциклопедия. 2014 г. [ONLINE] Доступно по адресу: http://en.wikipedia.org/wiki/Newton%27s_laws_of_motion. [Доступно 10 декабря 2014 г.].
-
Электричество — Википедия, бесплатная энциклопедия. 2014 г. [ONLINE] Доступно по адресу: http://en.wikipedia.org/wiki/Electricity. [Доступно 10 декабря 2014 г.].
-
Электродвигатель — Википедия, бесплатная энциклопедия.2014 г. [ONLINE] Доступно по адресу: http://en.wikipedia.org/wiki/Electric_motor. [Доступно 10 декабря 2014 г.].
-
Электрические формулы. 2014 г. [ONLINE] Доступно по адресу: http://www.engineeringtoolbox.com/electrical-formulas-d_455.html. [Доступно 10 декабря 2014 г.].
-
Внутри электродвигателя — как работают электродвигатели. 2014. [ONLINE] Доступно по адресу: http://electronics.howstuffworks.com/motor1.htm. [Доступно 10 декабря 2014 г.].
-
Электродвигатель — Википедия, бесплатная энциклопедия.2014 г. [ONLINE] Доступно по адресу: http://en.wikipedia.org/wiki/Electric_motor#Rotor. [Доступно 10 декабря 2014 г.].
-
Обзор Учебное пособие по типам электродвигателей. 2014. [ONLINE] Доступно по адресу: http://www.oddparts.com/acsi/motortut.htm. [Доступно 10 декабря 2014 г.].
-
Как работают электродвигатели? — Объясни это. 2014 г. [ONLINE] Доступно по адресу: http://www.explainthatstuff.com/electricmotors.html. [Доступно 10 декабря 2014 г.].
-
Магнитное поле — Википедия, бесплатная энциклопедия.2014 г. [ONLINE] Доступно по адресу: http: //en.wikipedia.org/wiki/Mintage_field#The_B-field. [Доступно 10 декабря 2014 г.].
-
Sähkö — Википедия. 2014. [ONLINE] Доступно по адресу: http://fi.wikipedia.org/wiki/S%C3%A4hk%C3%B6. [Доступно 10 декабря 2014 г.].
-
Sähkömagneettinen vuorovaikutus — Википедия. 2014. [ONLINE] Доступно по адресу: http://fi.wikipedia.org/wiki/S%C3%A4hk%C3%B6magneettinen_vuorovaikutus. [Доступно 10 декабря 2014 г.].
-
Калибровочный бозон — Википедия, бесплатная энциклопедия.2014. [ONLINE] Доступно по адресу: http://en.wikipedia.org/wiki/Gauge_boson. [Доступно 10 декабря 2014 г.].
-
Фотон — Википедия, бесплатная энциклопедия. 2014 г. [ONLINE] Доступно по адресу: http://en.wikipedia.org/wiki/Photon. [Доступно 10 декабря 2014 г.].
-
Quantum — Википедия, бесплатная энциклопедия. 2014 г. [ONLINE] Доступно по адресу: http://en.wikipedia.org/wiki/Quantum. [Доступно 10 декабря 2014 г.].
-
Sähkömagneettinen индукция — Википедия. 2014 г.[ONLINE] Доступно по адресу: http://fi.wikipedia.org/wiki/S%C3%A4hk%C3%B6magneettinen_induktio. [Доступно 10 декабря 2014 г.].
-
Maxwellin yhtälöt — Википедия. 2014. [ONLINE] Доступно по адресу: http://fi.wikipedia.org/wiki/Maxwellin_yht%C3%A4l%C3%B6t. [Доступно 10 декабря 2014 г.].
-
Magneettinen kvanttiluku — Википедия. 2014. [ONLINE] Доступно по адресу: http://fi.wikipedia.org/wiki/Magneettinen_kvanttiluku. [Доступно 10 декабря 2014 г.].
-
. 2014 г.. [ONLINE] Доступно по адресу: http://www.astro.utu.fi/edu/kurssit/perusteetjatko/sateily.pdf. [Доступно 10 декабря 2014 г.].
-
Электромагнитное поле — Википедия, бесплатная энциклопедия. 2014. [ОНЛАЙН] Доступно по адресу: http://en.wikipedia.org/wiki/Electromagnetic_field. [Доступно 10 декабря 2014 г.].
-
Вало — Википедия. 2014 г. [ONLINE] Доступно по адресу: http://fi.wikipedia.org/wiki/Valo. [Доступно 10 декабря 2014 г.].
-
Sähkömagneettinen vuorovaikutus — Википедия.2014. [ONLINE] Доступно по адресу: http://fi.wikipedia.org/wiki/S%C3%A4hk%C3%B6magneettinen_vuorovaikutus. [Доступно 10 декабря 2014 г.].
-
Вяри — Википедия. 2014 г. [ONLINE] Доступно по адресу: http://fi.wikipedia.org/wiki/V%C3%A4ri. [Доступно 10 декабря 2014 г.].
-
Magneettikentän eteneminen — Keskustelu — Tiede. 2014 г. [ONLINE] Доступно по адресу: http://www.tiede.fi/keskustelu/4002305/ketju/magneettikentan_eteneminen. [Доступно 10 декабря 2014 г.].
-
Fotoni-magneetti-elektroni (taas tätä pohdintaa… — Кескустелу — Тиеде. 2014 г. [ONLINE] Доступно по адресу: http://www.tiede.fi/keskustelu/25147/ketju/fotoni_magneetti_elektroni_taas_tata_pohdintaa. [Доступно 10 декабря 2014 г.].
-
Moderni fysiikka-ppt 2012 Maalampi Доступно на: users.jyu.fi/~maalampi/Moderni … / Moderni_fysiikka_luento_4_2012.ppt [Дата обращения 10 14 декабря]
-
. 2014 г. [ONLINE] Доступно по адресу: http://www05.abb.com/global/scot/scot201.nsf/veritydisplay/cb7f0073c500534bc1257d4f00495b5b/$file/TechnicalGuideBook_EN_3AFE64514482_RevH.pdf. [Доступно 10 декабря 2014 г.].
-
Центр загрузок ABB. 2014. [ONLINE] Доступно: http://www.abb.com/AbbLibrary/DownloadCenter/?showresultstab=true&browsecategory=9AAC100217&queryText=&languagecode=&documentkind=Guide&update=&displayVersion=islatest&accessgroup=#&&/wEXAQUDa2V5BYsBM8KwOUFBQzEwMDIxN8KxZHJpdmXCscKxR3VpZGXCscKxVMKxwrEwwrFmacKyZW7CsTM0wrFGScKxwrEywrFUwrEwwrHCsTDCsTHCsTIwwrEyMMKxMcKxwrHCscKxwrE5QUFDMTAwMjE3wrHCscKxwrExMcKxwrHCscKxMjHCscKxMMKxRknCscKxMCBq37RR93sVYRgXcdzpRTUu5Z2Y.[Доступно 10 декабря 2014 г.].
-
Регулируемый привод — Википедия, бесплатная энциклопедия. 2014 г. [ONLINE] Доступно по адресу: http://en.wikipedia.org/wiki/Adjustable-speed_drive. [Доступно 10 декабря 2014 г.].
-
Преобразователь частоты — Википедия, бесплатная энциклопедия. 2014 г. [ONLINE] Доступно по адресу: http://en.wikipedia.org/wiki/Frequency_changer. [Доступно 10 декабря 2014 г.].
-
Частотно-регулируемый привод — Википедия, бесплатная энциклопедия. 2014 г.[ONLINE] Доступно по адресу: http: //en.wikipedia.org/wiki/Variable-frequency_drive. [Доступно 10 декабря 2014 г.].
-
Электрические приводы Классификация частей и преимущества электрических приводов | Electrical4u. 2014. [ONLINE] Доступно по адресу: http://www.electrical4u.com/electrical-drives/. [Доступно 10 декабря 2014 г.].
-
Регулировка скорости двигателя постоянного тока | Electrical4u. 2014. [ONLINE] Доступно по адресу: http://www.electrical4u.com/speed-control-of-dc-motor/. [Доступно 10 декабря 2014 г.].
-
Электродвигатель постоянного тока щеточный — Википедия, бесплатная энциклопедия. 2014. [ONLINE] Доступно по адресу: http://en.wikipedia.org/wiki/Brushed_DC_electric_motor. [Доступно 10 декабря 2014 г.].
-
Что такое привод переменного тока и как он работает? — Vacon. 2014. [ONLINE] Доступно по адресу: http://www.vacon.com/Vacon/media/Articles/what-is-a-variable-speed-ac-drive/. [Доступно 10 декабря 2014 г.].
-
. 2014 г. [ONLINE] Доступно по адресу: http: //www.industry.usa.siemens.ru / services / us / en / industry-services / training / self-study-course / quick-step-course / documents / dc_drives.pdf. [Доступно 10 декабря 2014 г.].
-
Основы управления двигателем: режимы работы привода, управление крутящим моментом, каротрон скорости. 2014 г. [ONLINE] Доступно по адресу: http://www.carotron.com/applications/csag-d/. [Доступно 10 декабря 2014 г.].
-
. 2014 г. [ONLINE] Доступно по адресу: http://www.ixys.com/Documents/AppNotes/IXAN0052.pdf. [Доступно 10 декабря 2014 г.].
Войдите, чтобы комментировать.
Электродвигатели
Электродвигатели являются одними из наиболее распространенных видов электрического оборудования, находящегося в эксплуатации на сегодняшний день. От игрушек и бытовой техники до самых больших машин на планете используются электродвигатели. По оценкам, на двигатели как на крупнейших пользователей приходится от 43 до 46% от общего мирового потребления электроэнергии [1] .
Учитывая широкое использование двигателей, неудивительно, что многие сообщения на myElectrical посвящены этой теме.Эта заметка представляет собой сборник ссылок на многие наши автомобильные заметки и несколько внешних ресурсов. Я буду пытаться возвращаться на страницу время от времени, чтобы обновлять ее новыми заметками, которые добавляются на сайт.
Внутренние (myElectrical) ссылки
Инструмент калькулятора асинхронного двигателя — выполняет вычисления двигателя и предоставляет ссылки на формулы
Инструмент времени запуска двигателя — рассчитывает приблизительное время запуска для асинхронных двигателей
Понимание изоляции электродвигателя и температуры — в Легко понять форму
Как рассчитать время запуска двигателя Пост — сообщение, в котором объясняется, как это сделать
Сообщение о номинальной нагрузке двигателя — объясняет номинальные нагрузки по IEC
8 Детали двигателя и общие неисправности Сообщение — список общих неисправностей двигателя
Запуск двигателя — Введение — введение в запуск двигателя
Прочие примечания Статьи
В последний раз внутренние ссылки обновлялись в июне 2015 года.Если вы позже прочтете эту заметку, возможно, стоит воспользоваться поиском по сайту, чтобы найти дополнительную информацию, которая могла быть добавлена.
Внешние ссылки
Следующие ниже ссылки являются внешними по отношению к myElectrical и предназначены только для справки.
ЭлектродвигательЧто такое электродвигатель? — найдите ответ на answers.com
Базовая теория двигателя — двигатель переменного тока, двигатель постоянного тока и теория генератора
Электродвигатель — статья в Википедии об электродвигателях в целом
Двигатель переменного тока — статья в Википедии (типы двигателей, история и некоторые теории )
Промышленные электродвигатели переменного тока — техническое описание RS (скачать pdf)
Двухскоростные двигатели — руководство по двухскоростным электродвигателям (motorsandrives.ком)
— zxc.wiki
различные электродвигатели, с батареей 9 В для сравнения размеровЭлектродвигатель — электромеханический преобразователь (электрическая машина), преобразующий электрическую энергию в механическую. В обычных электродвигателях катушки с токонесущими проводниками создают магнитные поля, взаимные силы притяжения и отталкивания которых преобразуются в движение. Это делает электродвигатель аналогом генератора, который имеет очень похожую конструкцию и преобразует энергию движения в электрическую.Электродвигатели обычно генерируют вращательные движения, но они также могут быть сконструированы для поступательных движений (линейный привод). Электродвигатели используются для привода самого различного оборудования, рабочих машин и транспортных средств.
история
В 1820 году датский физик и философ Ганс Кристиан Эрстед открыл магнитный эффект электрического тока, фундаментальное явление электромагнетизма. Годом позже Майкл Фарадей опубликовал свою работу «Электромагнитное вращение».Он сконструировал устройство, в котором электрический проводник вращался вокруг неподвижного магнита, а в контр-эксперименте подвижный магнит вращался вокруг неподвижного проводника. В 1822 году Питер Барлоу разработал колесо Барлоу, названное в его честь. Британский ученый Уильям Стерджен изобрел еще один предшественник двигателя в 1832 году. На европейском континенте Аньос Йедлик (1827) и Герман Якоби работали над дальнейшим развитием электродвигателя постоянного тока. Якоби разработал первый практический электродвигатель в Потсдаме еще в 1834 году, а в 1838 году оборудовал лодку на 12 человек в Санкт-Петербурге разработанным им двигателем мощностью 220 Вт, который также был первым практическим применением электродвигателя.Американский кузнец Томас Дэвенпорт также разработал коллекторный двигатель в Вермонте. 25 февраля 1837 года он получил патент на свой дизайн.
Таким образом, примерно в 1837/1838 годах была известна основа для привода электродвигателя, которая превратилась в рабочую машину, пригодную для использования. Вернер фон Сименс запатентовал свою динамо-машину в 1866 году. Это впервые позволило производить электроэнергию в больших масштабах. Это помогло электромотору совершить прорыв для широкого практического использования.Кроме того, в то время были также некоторые технические разработки различных типов электродвигателей, но в конечном итоге они не имели значения. К ним относятся электродвигатель Egger, который сконструирован аналогично паровому двигателю, и электрический мотоцикл Иоганна Кравогля.
-
«Колесо Барлоу» (1822 г.)
-
«Магнитные электрические машины» I около 1890 г.
-
«Магнитные электрические машины» II ок. 1890 г.
Примерно с 1880 года электрические сети и электростанции были построены во многих странах.В Германии, например, Эмиль Ратенау был пионером своей Allgemeine Electricitäts-Gesellschaft, а в Америке Томас Альва Эдисон. Благодаря крупномасштабному обеспечению электроэнергией электродвигатель быстро распространился. Вместе с химической промышленностью эта электрификация была важнейшей характеристикой второй промышленной революции. Общественные конные трамваи были заменены электрическими трамваями, и теперь вместо паровых двигателей использовались электродвигатели для привода самых разных рабочих машин.
Основной принцип / функционал
Полярность магнитного поля ротора в двигателе постоянного тока со статором с постоянным магнитомВращательное движение электродвигателя основано на силах притяжения и отталкивания, которые несколько магнитных полей действуют друг на друга (сила Лоренца). В обычном электродвигателе есть неподвижная внешняя часть и вращающаяся в ней внутренняя часть. Либо один из них имеет постоянные магниты, а другой — электрические катушки, либо оба компонента имеют катушки.Каждая катушка, через которую протекает ток, создает магнитное поле, направление которого (северный полюс / южный полюс) зависит от направления тока — если ток течет в противоположном направлении через катушку, магнитное поле также меняется на противоположное. Путем многократного изменения полярности катушек за один оборот достигается непрерывное вращение внутренней части.
Условия
- статор
Неподвижная часть электродвигателя, действующая на магнитное поле, называется статором.В случае электродвигателей статор обычно находится снаружи и соединен с корпусом; Если статор находится внутри, двигатель называется «внешним ротором».
- ротор
Движущаяся (в основном вращающаяся), магнитно действующая часть электродвигателя, которая вращает ось электродвигателя. Он состоит из оси, якоря и катушки, если якорь не является постоянным магнитом.
- якорь
Железный сердечник ротора, вокруг которого намотаны катушки ротора.
- Полюс
Подковообразная выпуклость из железа магнитопровода, которая предназначена для направления / концентрации магнитного поля в этой точке.
- коммутатор
Диск с электрическими соединениями, которые являются сегментами диска; диск вращается вместе с валом ротора. Катушки подключаются к соединениям; диск коммутатора меняет полярность катушек за один оборот. Точная функциональность объясняется в следующем разделе.
Двигатель постоянного тока (коллекторный двигатель)
Ротор коллекторного двигателя; Угольные щетки и статор сняты.(Неподвижный) статор в двигателе постоянного тока может быть постоянным магнитом с полюсными наконечниками, но также возможно внешнее возбуждение через катушку возбуждения вместо постоянного магнита. Однако в случае коллекторного двигателя переменного тока или универсального двигателя в статоре всегда есть катушка возбуждения. Если через эту катушку проходит ток, создается поле возбуждения (магнитное поле) (принцип Эрстеда).
Внутри статора находится ротор, который в большинстве случаев состоит из катушки с железным сердечником (так называемый якорь), который установлен с возможностью вращения в магнитном поле между полюсными наконечниками статора.
Питание якоря осуществляется через сегментированный коммутатор и скользящие контакты (угольные щетки). Если вы пропустите ток через ротор, здесь также создается магнитное поле, которое теперь взаимодействует с магнитным полем статора. Таким образом, он вращается вокруг своей оси и всегда переключает соответствующие обмотки на путь тока через коммутатор, который вращается вместе с ним, и таким образом может преобразовывать электрическую работу в механическую.
Если бы у такого двигателя не было коммутатора, якорь вращался бы до тех пор, пока магнитное поле ротора не выпрямится с полем статора. Чтобы он не остановился в этой «мертвой точке», ток в катушках якоря переключается с помощью коммутатора (также называемого коммутатором или коллектором) с каждым новым сегментом. Коммутатор состоит из металлических сегментов, которые образуют цилиндрическую или круглую поверхность, прерванную узкими полосками из непроводящего материала (пластик, воздух). Обмотки якоря подключаются к сегментам.На коллекторе, поджимаемом пружинами, обычно есть две угольные щетки, которые подают ток. При каждом повороте ротора направление тока через обмотки якоря изменяется, и те проводники, ток которых направлен таким образом, что создается крутящий момент, входят в магнитное поле статора.
Магнитное поле в роторе — относительно статора — фиксированное; поэтому железный сердечник вращающегося якоря должен состоять из стопки листов, чтобы избежать вихревых токов.
Двигателипеременного тока также могут быть построены в соответствии с этим принципом, если поле возбуждения меняет полярность с переменным током (универсальный двигатель). Тогда статор также должен состоять из многослойного сердечника.
Двигатели переменного тока и трехфазные
Асинхронный трехфазный двигатель в разобранном виде с короткозамкнутым ротором мощностью 750 Вт.При переменном токе можно обойтись без коммутатора, если количество оборотов соответствует ритму переменного тока; затем создается вращающееся магнитное поле ротора:
Следовательно, такие двигатели имеют небольшой пусковой крутящий момент или не имеют его вообще.Вам нужна помощь при запуске, но вы также можете начать работу с переменным током с более чем одной фазой:
- Трехфазные двигатели работают от трехфазного тока, который состоит из трех переменных напряжений, которые сдвинуты по фазе на 120 ° и, таким образом, создают вращающееся поле
- Конденсаторные двигатели и двигатели с экранированными полюсами генерируют вспомогательную фазу (вращающееся поле) для запуска от однофазного переменного тока.
- Шаговые двигатели и реактивные двигатели работают с переменным током переменной частоты и / или с несколькими фазами, так что они остаются «в тактовом» режиме и не возникают ступенчатые потери.
- Синхронным двигателям требуется помощь при запуске, или они сами раскачиваются / качаются «шаг за шагом».
Типы электродвигателей
Обмотки в большом электродвигателеМашины вращающегося и подвижного поля
Коммутатор или коммутатор
Прочие
Есть несколько типов электродвигателей, которые на сегодняшний день не имеют экономического значения.
Вместо магнитных полей в электростатических двигателях используются электрические поля, создаваемые зарядами.Из-за требуемых высоких напряжений и более низкого КПД эти двигатели подходят только для небольших сил и размеров.
Приложения
Электродвигатели бывают нерегулируемые и регулируемые. В простых случаях используются неуправляемые трехфазные двигатели с переключением со звезды на треугольник. Однако они подходят только для решения примитивных приводных задач. В большинстве случаев в сегодняшней практике возникают более сложные проблемы с приводом, поэтому электродвигатели должны регулироваться с помощью системы управления с обратной связью.Если требуемая мощность больше, необходимо установить силовые электронные приводы между системой управления и электродвигателем. Если система управления и электродвигатель объединяются и вместе образуют функциональную единицу, то говорят об «электрическом приводе». Следовательно, электродвигатель не привязан к регулированию как таковому; однако во многих практических случаях оказалось полезным именно их взаимодействие.
В прошлом электродвигатели первоначально находили практическое применение в качестве привода трамваев, а немного позже — в качестве универсального привода для замены паровых двигателей на заводах, и для этой цели они использовались с помощью ременных приводов для привода механических ткацких станков и т.п.С введением в промышленность сборочных линий электродвигатели стали движущей силой целых отраслей промышленности.
В секторе транспорта и мобильности электродвигатели сначала использовались в электровозах и электрических железных дорогах, позже в электрических тележках и вилочных погрузчиках. По мере дальнейшего развития аккумуляторных батарей электромобили строятся с еще большим запасом хода и в будущем будут рассматриваться как альтернатива двигателю внутреннего сгорания благодаря высокой эффективности электрического привода.Развитие силовой электроники привело к дальнейшему развитию приложений — с этого момента недорогие асинхронные двигатели, не требующие технического обслуживания, также можно было использовать для частотно-регулируемых приводов.
Сегодня электродвигатели в большом количестве используются в машинах, автоматах, роботах, игрушках, бытовой технике, электронных устройствах (например, видеомагнитофонах, жестких дисках, проигрывателях компакт-дисков), в вентиляторах, газонокосилках, кранах и т. Д. Большое значение Электродвигатель для современного индустриального общества также отражается в потреблении энергии: на электродвигатели приходится более 50 процентов потребления электроэнергии в Германии.
Электродвигатели в мобильных приложениях
Зарядка электромобиля на общественной улице в БерлинеЭлектродвигатели уже давно используются в автомобилях и поездах. Причины этого:
- высокий КПД (особенно при работе с частичной нагрузкой, важно для работы от батареи),
- Непрерывный выход крутящего момента во всем диапазоне скоростей, не требуется синхронизации запуска или переключения передаточного числа. Это означает высокий уровень комфорта при вождении (что также важно, например, для электрических инвалидных колясок).
- Меньшие габариты и масса, чем у сопоставимого двигателя внутреннего сгорания; Это позволяет компактную установку рядом с колесами.
- Без выбросов; поэтому возможно использование в зонах, чувствительных к выбросам (например, в производственных цехах, туннелях и жилых районах)
- Более низкие эксплуатационные расходы (очень долгий срок службы двигателя, меньшие затраты на техническое обслуживание).
- Простая конструкция, включая более простую систему охлаждения.
- Установка электродвигательного тормоза, который обеспечивает рекуперативное торможение с рекуперацией энергии и не требует каких-либо работ по техническому обслуживанию из-за износа, как в случае с обычными тормозными системами.
Несмотря на эти преимущества, электродвигатель пока мало используется в легковых и грузовых автомобилях. Причина, в частности, в ограниченном максимальном радиусе действия или большой массе накопителя энергии (аккумуляторов) и долгом времени их зарядки.
Некоторые модели самолетов (электрические летательные), малые корабли, торпеды и подводные лодки питаются от электродвигателя и аккумулятора. Электродвигатели других подводных лодок питаются от топливных элементов или от небольшой атомной электростанции, которая перевозится вместе с ними.
Концепции привода транспортных средств с электродвигателями, но без накопления энергии или с частичным накоплением энергии в аккумуляторе:
- Привод топливных элементов. Один из проектов — это, например, HyFLEET: CUTE, продолжение проекта CUTE. Проблемы существуют в сроке службы и стоимости топливных элементов.
- Гибридный привод (например, Toyota Prius): бензиновый двигатель сочетается с электродвигателем / генератором и буферизуется с помощью аккумуляторов (преимущества в диапазоне частичных нагрузок / городских условиях, высокий комфорт вождения, рекуперативное торможение (рекуперация), буферизация также с двухслойной конденсаторы).
- Гиропривод: a используется в качестве маховика накопителя энергии с генератором, приводящим в действие приводные двигатели (в частности, в Gyrobussen применяется низкий диапазон, возможно рекуперативное торможение).
В случае электрических железных дорог и троллейбусов электроэнергия подается по воздушным линиям или сборным шинам. Здесь также может происходить рекуперативное торможение, если для этого предусмотрена сеть питания или установлены гидроаккумуляторы. Здесь также используются двухслойные конденсаторы.
Еще одно мобильное приложение — дизель-электрический привод; Здесь дизельный генератор вырабатывает электричество, которое приводит в движение тяговые двигатели. Рекуперативное торможение невозможно, если также не перевозятся аккумуляторные батареи. Дизель-электрические приводы можно найти на кораблях, локомотивах и подводных лодках (здесь они дополнены аккумулятором).
Применения в промышленности
Разнообразные области применения электродвигателей в промышленности можно разделить на двенадцать областей. Первые четыре связаны с материальным потоком.Следующие четыре — с непрерывными или синхронизированными производственными линиями, а последние два — с процессами, влияющими на детали.
- Конвейерные приводы: от приводов требуется длительный срок службы, прочность и надежность, низкие требования к техническому обслуживанию, высокая модульность и низкое энергопотребление. Приводы в основном используются в непрерывном режиме, поэтому ускорения играют второстепенную роль.
- Ходовые приводы используются на транспортных средствах для перевозки материалов, например, в транспортных системах без водителя, портальных кранах, устройствах для хранения и извлечения или электрических монорельсовых системах.Для точного подхода к позициям требуется высокая точность приводов.
- Приводы подъемника должны перемещать товары вертикально вверх. К ним относятся краны, подъемные столы, грузовые лифты и строительные подъемники.
- Приводы позиционирования используются для перемещения отдельных товаров из одной точки в другую. Это включает сборку электронных компонентов, подачу и снятие деталей на производственных и сборочных машинах. Большинство этих приводов сконструированы как линейные прямые приводы.
- Скоординированные приводы для роботов: Промышленные роботы часто имеют до шести осей, которые должны иметь определенное целевое положение одновременно во время движения. Поэтому координация отдельных приводов необходима для создания желаемого движения манипулятора робота.
- Синхронные приводы используются в производственных процессах, в которых непрерывный продукт изготавливается как бесконечный материал. К ним относятся транспортировка, прокатка, нанесение покрытий, прядение и скручивание, а также печать.
- Обмоточные приводы часто находятся в начале или в конце непрерывного производственного процесса. Они используются, например, на сталелитейных заводах для наматывания листового металла в бухты, а также в машиностроении и автомобилестроении для их повторной разматывания. Другими примерами являются наматывание и разматывание проволоки, ниток или бумаги. Поскольку с течением времени намотанный материал имеет все большую окружность, окружная скорость увеличивается, в то время как скорость остается прежней. Чтобы изделие не разрывалось, приводы необходимо регулировать по окружности намотанного материала.
- Цикловые приводы для торцовочных станков и летучих пил используются в непрерывном производстве для отделения текучего материала, например, путем отпиливания секции. Особые требования возникают из-за того, что материал перемещается в процессе резки.
- Приводы для электронных кулачков — это приводы с неравномерным движением. Например, вырубной инструмент должен медленно опускаться, чтобы обеспечить хорошее качество обработки заготовки, и быстро поднимать ее. Другие области применения — склеивание, сварка, гибка и резка.
- Приводы для процессов формования: к ним относятся прессование листовой стали, экструзия пластмасс, глубокая вытяжка или ковка методом капельной ковки.
- Главный и инструментальный приводы в станках. Они используются для привода фрезерных станков, сверл и токарных станков. Это единственный промышленный вариант использования, для которого имеется обширная техническая литература.
- Приводы для насосов и вентиляторов.
Эффективность и экономичность
Технологически устаревшие электродвигатели приводят к повышенному потреблению энергии.В 1998 году было достигнуто добровольное соглашение между Европейским секторным комитетом по электрическим приводам CEMEP и Европейской комиссией. В этом уже устаревшем соглашении были определены три класса эффективности:
- EFF3 = двигатели с низким КПД
- EFF2 = двигатели с повышенным КПД
- EFF1 = двигатели с повышенным КПД
В 2009 году был введен новый глобальный стандарт для классов эффективности (EN 60034-30: 2009). Следующие классы эффективности для низковольтных трехфазных асинхронных двигателей в диапазоне мощностей от 0.Сегодня применимы от 75 кВт до 375 кВт:
- IE1 = стандартная эффективность (сопоставима с EFF2, продажи с июня 2011 года разрешены только в ограниченной степени)
- IE2 = высокая эффективность (сравнима с EFF1)
- IE3 = повышенная эффективность
- IE4 = Super Premium (реализовано> 97%)
С 16 июня 2011 года неуправляемые двигатели (0,75–375 кВт) могут быть размещены на рынке только с классом мощности IE2. Доля высокоэффективных двигателей будет неуклонно увеличиваться.Примерами являются синхронные двигатели с постоянными магнитами с высочайшим КПД.
Производство электродвигателей
Отдельные компоненты электродвигателя изготавливаются независимо друг от друга. Наиболее важными из них являются корпус, статор, вал и ротор. Затем происходит окончательная сборка.
Изготовление корпуса
Фактический корпус закрыт с обеих сторон крышками, которые, когда используются подшипниковые щиты электродвигателя, также используются подшипники вала двигателя посредством шарикоподшипников.Однако отдельные этапы процесса изготовления торцевых экранов и корпуса одинаковы. Оба материала сначала получают грубой формы путем литья или экструзии, затем следует тонкая обработка с токарной обработкой, сверлением и шлифованием и, наконец, очистка. Детали зависят от количества произведенных товаров.
Литье в формах из песка используется только в небольших количествах, например, при производстве прототипов. Литье под давлением и центробежное литье, а также экструзия подходят для средних и больших партий.Литье под давлением — самый распространенный процесс с долей 60%. Здесь форма сделана из стали и может быть отлит около 80 000 раз. Требуемые машины стоят от 700 000 евро до одного миллиона евро, так что минимальное количество около 15 000 должно быть достигнуто, чтобы быть экономичным. С другой стороны, системы центробежного литья стоят всего от 60 000 до 100 000 евро. Самые дорогие — экструзионные прессы стоимостью 8 миллионов евро. Поэтому они подходят только для очень больших серий, но при этом имеют самые низкие удельные затраты.
После литья или экструзии с корпуса снимается заусенец. Дальнейшая точная обработка в основном выполняется на обрабатывающих центрах, специализирующихся на токарной обработке, сверлении, фрезеровании и шлифовании. В задачи входит растачивание внутреннего контура, чистовая обработка кромок и сверление отверстий или резьб.
В случае малых серий корпус обычно очищается струйной очисткой сухим льдом (так называемая струйная очистка сухим льдом) или мелкими шариками (дробеструйная очистка). Это удаляет остатки литья, стружку, пыль и другие частицы грязи.В случае средних серий очистка осуществляется с помощью ультразвуковой ванны. В случае больших серий используются системы непрерывной очистки, которые состоят из станции подачи, зон очистки и ополаскивания, зоны сушки и станции передачи.
Производство упаковок из листового металла
Фактические компоненты для выработки энергии, то есть ротор и статор, собраны из многослойных сердечников. По сравнению с конструкцией из твердого материала многослойные сердечники имеют то преимущество, что они предотвращают появление вихревых токов и, следовательно, повышают эффективность.Собирая листы в пачки, важно избегать коротких замыканий. Поэтому отдельные листы покрываются изолятором. Они сделаны из электротехнической стали. Это листы из кремнийсодержащей стали с улучшенными магнитными свойствами. Поскольку его производство достаточно сложное, его покупают производители электродвигателей. Пакеты листового металла изготавливаются в несколько этапов: раскрой листов, штабелирование, прочное соединение (склеивание, сварка и т. Д.) И доработка.
Для небольших серий или прототипов листовой металл вырезается с помощью лазерной или водоструйной резки. Перфорация более экономична для больших серий. Затем листы складываются в стопку. При перфорации это можно сделать прямо на станке, в то время как для других процессов необходим дополнительный этап процесса. Существует множество вариантов соединения штабелей листового металла. В массовом производстве язычки часто прижимаются к отдельным металлическим листам в углублениях нижележащих слоев. Этот этап часто интегрируется непосредственно в процесс штамповки.После укладки отдельные слои также можно сваривать. Это экономично при значительно меньших количествах, но имеет тот недостаток, что создается электрически проводящее соединение, которое способствует развитию вихревых токов. Поскольку сварные швы могут быть выполнены в местах, не имеющих большого значения для магнитного поля, недостатки с точки зрения эффективности невелики. Другой вариант — использовать лак для выпечки. Здесь после штамповки отдельные листы покрываются лаком для выпечки, складываются в стопки и запекаются в духовке.В результате слои склеиваются, с одной стороны, и изолированы, с другой.
Последним этапом может быть постобработка, что несколько увеличивает эффективность. Сюда входят отжиг для снятия напряжений, внешнее точение, удаление заусенцев и перекраска. Поскольку повышение КПД невелико, это в основном происходит с большими двигателями.
Производство статора
Статор, на который приходится 35% общих затрат, является самым дорогим компонентом. Это связано со сложным производством и дорогим материалом.Отдельные этапы процесса — это изоляция компонентов, наматывание катушек, обработка намотки и пропитка.
Изолирующая бумага используется между ламинированным сердечником и обмотками катушек, чтобы избежать пробоев напряжения. Проволока, необходимая для катушек, изготавливается путем волочения проволоки, затем покрывается слоем изоляционного лака, а затем скользящим слоем, облегчающим намотку.
В технологии намотки катушек используются многочисленные методы и процессы производства катушек.Наиболее важными из них являются линейная технология, технология намотки флаеров и игл. Системы для намотки катушек стоят от 150 000 евро для простых машин и до 4 миллионов евро для систем для крупносерийного производства.
После того, как катушки встроены в статор, концы проводов контактируют и испытывают.
Производство вала
Доля затрат на волну очень мала и составляет всего 5%. Производство происходит в три этапа: черновая обработка в мягком состоянии, закалка и чистовая обработка шлифованием.
В случае больших количеств первое формование обычно выполняется ковкой, в частности, штамповкой методом капельной ковки. Обрабатывающие центры используются для малых и средних партий, как для изготовления корпуса. Для закалки используются обычные методы термообработки, включая индукционную закалку, цементацию и азотирование. Во всех случаях окончательная форма создается точным точением или шлифованием.
Производство ротора
В случае двигателей с постоянными магнитами этапы производства намагничивания, узла магнита, узла вала и балансировки взаимозаменяемы, но разные последовательности имеют свои преимущества и недостатки.
Для асинхронных двигателей используется клетка ротора. В основном он изготавливается методом литья под давлением. При сборке прототипа его также спаяют из прутков и колец. Высококачественные сепараторы изготовлены из меди, которая имеет более высокую проводимость, чем алюминий, но также примерно в четыре раза дороже и плавится только при 1084 ° C. Алюминиевые сплавы, с другой стороны, плавятся при 600 ° C. Следовательно, алюминиевые формы можно разливать около 50 000 раз, в то время как формы для меди можно разливать только 100 раз.Обычно расплав заливается прямо в пазы ротора.
Окончательная сборка
Из-за множества различных типов двигателей и возможных количеств существует большая пропускная способность и варианты окончательной сборки, от исключительно ручной сборки до полностью автоматических сборочных линий.
Сначала в корпус встраивается статор. Это можно сделать путем усадки, прессования или склеивания. Затем пакет ротора вставляется в статор.
Следующим шагом будет сборка датчиков.В асинхронных двигателях это тахометр, а в двигателях с постоянными магнитами — датчик положения (инкрементальный энкодер). Их также усаживают, вдавливают или склеивают. Также установлены датчики температуры.
Затем датчики и отдельные фазы подключаются к разъему.
Затем торцевые щитки комплектуются шарикоподшипниками и крепятся к корпусу. На последнем этапе проводится окончательный осмотр, а также проверка сопротивления, изоляции, работоспособности и высокого напряжения, а также проверка силовой электроники.
литература
- Herbert Rentzsch: Электродвигатели. 4. Пересмотренное издание, ABB Drives AG, Турги / Швейцария, 1992, ISBN 3-590-80853-5.
- Петер Бастиан, Гюнтер Шпрингер: Опыт в области электротехники. 21. исправл. И доп. Издание Verlag Europa-Lehrmittel, Haan-Gruiten, 1996, ISBN 3-8085-3431-1.
- Грегор Д. Хеберле, Хайнц О. Хеберле: Электрические машины в энергетических системах. 3. исправленная и доп. Издание Verlag Europa-Lehrmittel, Haan-Gruiten, 1994, ISBN 3-8085-5003-1.
- Конрад Рюффер: Импульсные электродвигатели. Verlag Technik, Берлин 1990, ISBN 3-341-00827-6.
См. Также
Интернет-ссылки
Индивидуальные доказательства
- ↑ Уильям Стерджен родился 22 мая 1783 года в Уиттингтоне, Ланкс, умер 4 декабря 1850 года в Прествиче, Ланкашир. In: whittingtonvillage.org.uk/. Проверено 28 февраля 2015 г.
- ↑ LEIFIphysik, History of the Electric Motor, по состоянию на 4 апреля 2020 г.
- ↑ Ulrich Wengenroth: Elektroenergie , S. 328–334 in: Ulrich Wengenroth (Ed.): Technik und Wirtschaft , 1993: (Том 8: Armin Hermann, Wilhelm Dettmering (Ed.): Technology and Culture , Дюссельдорф, VDI-Verlag)
- ↑ Исследование VDE по эффективности и потенциальной экономии электроэнергии (Memento от 11 апреля 2008 г. в Internet Archive )
- ↑ Эдвин Киль (Ред.): Drive solutions — Мехатроника для производства и логистики , Springer, 2007, стр.283f.
- ↑ Эдвин Киль (Ред.): Drive solutions — Мехатроника для производства и логистики , Springer, 2007, стр. 288f., 292f.
- ↑ Эдвин Киль (Ред.): Решения для приводов — Мехатроника для производства и логистики , Springer, 2007, стр. 303.
- ↑ Эдвин Киль (Ред.): Решения для приводов — Мехатроника для производства и логистики , Springer, 2007, стр. 324f.
- ↑ Эдвин Киль (ред.): Приводные решения — мехатроника для производства и логистики , Springer, 2007, стр.351f.
- ↑ Эдвин Киль (ред.): Приводные решения — мехатроника для производства и логистики , Springer, 2007, стр. 373.
- ↑ Эдвин Киль (Ред.): Решения для приводов — Мехатроника для производства и логистики , Springer, 2007, стр. 396.
- ↑ Эдвин Киль (ред.): Приводные решения — мехатроника для производства и логистики , Springer, 2007, стр. 424.
- ↑ Эдвин Киль (Ред.): Решения для приводов — Мехатроника для производства и логистики , Springer, 2007, стр.439.
- ↑ Economic Сравнение электродвигателей разного класса эффективности , Ing.-Büro Dolder, 12 апреля 2010 г., по состоянию на 23 февраля 2012 г.
- ↑ ZVEI, апрель 2009 г .: Новые классы эффективности для низковольтных трехфазных двигателей , по состоянию на 23 февраля 2012 г. (PDF; 494 kB)
- ↑ a b Директива по энергоэффективности и экодизайну (памятная записка от 18 октября 2011 г. в интернет-архиве ), DENA, июль 2010 г., по состоянию на 23 февраля 2012 г.
- ↑ a b Не обращайте внимания только на классы эффективности — Интервью с экспертом по новым классам энергоэффективности, wirautomatisierer.de, от 5 августа 2010 г., по состоянию на 23 февраля 2012 г.
- ↑ Энергоэффективность электродвигателей , пресс-релиз 053/2009, Федеральное агентство по окружающей среде, по состоянию на 23 февраля 2012 г.
- ↑ Ахим Кампкер: Elektromobilproduktion , Springer, 2014, стр. 136.
- ↑ Ахим Кампкер: Elektromobilproduktion , Springer, 2014, стр. 138f.
- ↑ Ахим Кампкер: Elektromobilproduktion , Springer, 2014, стр. 141f.
- ↑ Ахим Кампкер: Elektromobilproduktion , Springer, 2014, стр. 148.
- ↑ Ахим Кампкер: Elektromobilproduktion , Springer, 2014, стр. 149f.
- ↑ Ахим Кампкер: Elektromobilproduktion , Springer, 2014, стр. 156f.
- ↑ Ахим Кампкер: Elektromobilproduktion , Springer, 2014, стр. 159–172.
- ↑ Ахим Кампкер: Elektromobilproduktion , Springer, 2014, стр. 172f.
В чем разница между двигателями переменного, постоянного тока и ЕС?
Президент Байден предлагает 2 доллара.План инфраструктуры 3 трлн включает средства на развитие высокоскоростной железной дороги. Когда в США наконец-то появится высокоскоростной железнодорожный транспорт, водители смогут воспользоваться теми же конструкциями, которые теперь делают высокоскоростные поезда в Японии удивительно комфортными даже на скорости до 225 миль в час.
Одной из причин, по которой последнее поколение японских высокоскоростных поездов, известных как «Синкансэн», движется так плавно, является внедрение технологии электромеханического привода и планетарного роликовинтового механизма в их системах активного контроля раскачивания.
Вот как работает активный контроль раскачивания: акселерометр определяет поперечное раскачивание вагона поезда из-за рельсов, воздушного потока и других факторов. Контроллер вычисляет тягу, чтобы противостоять раскачиванию, и отправляет этот сигнал на привод. Каждая колесная тележка (то есть тележка или шасси с двумя осями, четырьмя колесами) имеет один привод и пассивный демпфер для ослабления поперечной вибрации.
В системе высокоскоростных рельсов Синкансэн в Японии используются электромеханические приводы и планетарные роликовые винтовые передачи для активных систем управления раскачиванием.Piti Sirisriro / Dreamstime
Электромеханические приводы качания являются частью конструкции Синкансэн серий E5 и E6, или сверхскоростного поезда, эксплуатируемого Восточно-Японской железнодорожной компанией. Вагоны поезда могут похвастаться надежной системой стабилизации, которая снижает раскачивание до 50% по сравнению с обычными системами, и служит противодействием вибрации, наклону и высокой скорости поездов.
Система состоит из электромеханического привода с роликовыми винтами, серводвигателя и привода.Каждый из пассажирских вагонов поезда включает в себя два блока стабилизации, связанных с датчиком, который определяет силы, действующие на вагоны.
Перед тем, как внедрить электромеханическую систему управления раскачиванием, Восточно-Японская железнодорожная компания привела в действие свою активную систему контроля раскачивания с помощью пневматической системы. Другие японские компании по производству сверхскоростных поездов используют полуактивный контроль раскачивания, полагаясь на регулируемый масляный демпфер для регулировки демпфирующей силы.
Активная система контроля раскачивания Синкансэн изображена на этой схеме.Moog Inc.
Когда Восточно-Японская железнодорожная компания решила увеличить максимальную скорость движения поездов серий E5 и E6 до 225 миль в час, инженеры поняли, что им нужно приложить больше усилий в более широком частотном диапазоне, чтобы уменьшить вибрацию пассажиров. Японская железнодорожная отрасль чрезвычайно строга к испытаниям производительности и нагрузкам, поэтому каждый компонент новой системы качания должен был выдержать серию тестов на экологические проблемы, выносливость, боковую нагрузку и поломки.
После рассмотрения нескольких предложений и конструкций системы управления раскачиванием инженеры Восточно-Японской железной дороги выбрали решение электромеханического срабатывания или EMA. Электромеханический дизайн выиграл также из-за размера оболочки системы управления по сравнению с предложениями конкурентов; Решение EMA для качания предлагает более прочную систему в более компактной конфигурации, обеспечивая при этом быстрый отклик и высокую тягу.
Когда условия приводят в действие электромеханический привод, демпфер уменьшает силу, чтобы максимизировать свой демпфирующий эффект.Когда привод не активирован, демпфирующую силу обеспечивает пассивный демпфер. Результат: пассажиры наслаждаются безопасной и комфортной поездкой на скорости до 225 миль в час.
A Гибкая приводная платформа и система управления Dx2020.Moog Inc.
Конструкция с роликовым винтом Integral
Среди причин, по которым эти электромеханические решения обеспечивают более высокую производительность, является использование лучших материалов и конструкции. Например, для системы управления раскачиванием поездов E5 и E6 команда инженеров включила планетарный роликовый винт с электромеханическим приводом и использовала метод проб и ошибок для оптимизации решения.Чтобы достичь желаемого уровня надежности и безопасности, инженеры протестировали планетарные роликовые винтовые приводы в различных условиях, с которыми может столкнуться Синкансэн.
Количество точек контакта между роликами и ходовым винтом позволяет роликовому винту достигать большей грузоподъемности, чем, скажем, шарико-винтовая передача того же диаметра. Однако каждый производитель компонентов полагается на уникальный производственный процесс, чтобы гарантировать точность своих роликовых подшипников. Разработчик системы не может просто предположить, что роликовый винт будет работать лучше шарико-винтовой передачи.Задача состоит в том, чтобы обеспечить соответствие допусков каждого роликового винта целям производительности.
Новые приложения
Электромеханические решения, будь то высокоскоростной поезд или любое другое оборудование, являются альтернативой гидравлическому и пневматическому управлению для высоконадежных систем. Например, теперь существуют барьеры безопасности с электромеханическим приводом, которые могут остановить грузовик весом 15 000 фунтов, движущийся со скоростью 50 миль в час, с проникновением менее 1 метра. Эти системы выдержали постоянные испытания, более миллиона циклов.
Эти полностью электрические приводные системы имеют степень защиты IP-68, что означает, что они могут работать полностью погруженными в воду и работать от трехфазного источника питания 208, 380 или 480 вольт. И EMA барьеров будет работать в широком диапазоне температур, простирающемся от экстремальных пустынных условий до арктического холода — условий, часто несовместимых с другими технологиями срабатывания.
Множественные точки контакта между роликами и ходовым винтом позволяют увеличить допустимую нагрузку. Moog Inc.
Пневматические и гидравлические vs.Электрический
Часто обсуждается вопрос о том, дороже ли использовать электрический или пневматический привод. Рассмотрим, например, затраты на рабочую силу и время простоя производства на переналадку, включающую перестройку производственной линии для производства другого продукта. Стоимость пневматических систем может достигать сотен тысяч долларов в год. Однако электрические приводы могут сохранять настройки, поэтому годовые затраты на переналадку значительно снижаются.
В автомобильных испытаниях руководители лабораторий традиционно обращаются к гидравлическому приводу, потому что это известная технология.Но электромеханические автомобильные испытательные системы более распространены, потому что серводвигатели имеют конкурентоспособные цены, а технология теперь может обеспечивать сопоставимые характеристики. Поскольку электродвигатели являются автономными, нет необходимости в фильтрах или уплотнениях, требующих очистки или замены.
Предыдущие электрические системы могли управляться промышленным ПЛК, но последние электрические серводвигатели имеют контроллеры в реальном времени. Такие технологии, как EtherCat, позволяют напрямую обмениваться данными между электродвигателем и приводом.
Конструкторы, которые придерживаются системно-ориентированного подхода к машиностроению, лучше всего увидят плюсы и минусы электромеханической технологии для достижения желаемых клиентами целей. Важнейшей частью является работа с партнерами, которые нейтральны в отношении технологий, но при этом знают все соответствующие технологии.
Энрико Баньяско — координатор маркетингового контента отдела электромеханики и управления движением компании Moog Inc. В его обязанности входило развитие маркетинга в Европе, разработка бренда, организация международных торговых мероприятий и глобальный надзор за технической литературой.Свяжитесь с ним по телефону [email protected] .
Энергоэффективные двигатели
Энергоэффективные двигатели
Описание
Энергоэффективные двигатели потребляют меньше электроэнергии, работают при более низкой температуре и часто служат дольше, чем NEMA (Национальная ассоциация производителей электрооборудования) B двигатели того же размера.
Чтобы эффективно оценить преимущества электродвигателей с высоким КПД, мы должны определить: «эффективность». Для электродвигателя КПД — это отношение передаваемой механической мощности. двигателем (выход) на электрическую мощность, подаваемую на двигатель (вход).
КПД = (выходная механическая мощность / потребляемая электрическая мощность) x 100%
Таким образом, двигатель с КПД 85% преобразует 85% электроэнергии. ввод в механическую энергию. Остальные 15 процентов электроэнергии потребляются. рассеивается в виде тепла, о чем свидетельствует повышение температуры двигателя. Энергоэффективный электрический в двигателях используется улучшенная конструкция двигателя и высококачественные материалы для снижения потерь в двигателе, тем самым повышая эффективность двигателя.Улучшенная конструкция приводит к меньшему тепловыделению и пониженный уровень шума.
Большинство электродвигателей, произведенных до 1975 года, были спроектированы и изготовлены с учетом минимальные уровни производительности как компромисс для низкой закупочной цены. Эффективность сохранена только на достаточно высоких уровнях, чтобы соответствовать ограничениям по превышению температуры конкретного двигателя. В 1977 году (NEMA) рекомендовала процедуру для маркировка стандартных трехфазных двигателей со средним номинальным КПД.Эти эффективности представляют собой среднее значение по отрасли для большого количества двигателей одинаковой конструкции. Таблица 1 сравнивает текущую номинальную эффективность стандартной полной нагрузки для стандартной и энергоэффективной моторы разных размеров. Обратите внимание, что эти значения эффективности являются средними для трехфазной конструкции B. моторы. (Двигатели конструкции B составляют 90% всех асинхронных двигателей общего назначения. Классификацию асинхронных двигателей см. В публикации технических требований NEMA MG-1-1.16.) Двигатели других типов (конструкции A, C или D) имеют немного другой КПД, в то время как одиночные фазовые двигатели имеют существенно меньший КПД.Энергоэффективные двигатели продаются только с характеристиками крутящего момента NEMA B.
|
ТАБЛИЦА 1 Стандартные двигатели со средней номинальной эффективностью при полной нагрузке и энергоэффективные двигатели |
||
| Номинальная л.с. | Стандартный двигатель * | Высокоэффективный двигатель * |
| 1.0 | 75,5 | 82,6 |
| 1,5 | 78,1 | 83,3 |
| 2,0 | 80,5 | 83,8 |
| 3,0 | 81,2 | 87.7 |
| 5,0 | 82,8 | 88,6 |
| 7,5 | 83,8 | 89,8 |
| 10,0 | 85,2 | 90,1 |
| 15,0 | 86,8 | 91.3 |
| 20,0 | 87,8 | 91,9 |
| 25,0 | 88,3 | 92,8 |
| 30,0 | 89,1 | 92,7 |
| 40,0 | 89,6 | 93.3 |
| 50,0 | 90,5 | 93,8 |
| 60,0 | 90,6 | 94,1 |
| 75,0 | 91,2 | 94,4 |
| 100,0 | 91,8 | 94.7 |
| 125,0 | 92,4 | 95,3 |
| 150,0 | 92,9 | 95,5 |
| 200,0 | 94,0 | 95,4 |
| * Конструкция B, четырехполюсная, трехфазная | ||
КПД двигателя — это фактор множества механических и электрических недостатков внутри. мотор.Потери сопротивления (I 2 R) в обмотках статора и роторе стержни могут снизить КПД до 15% в трехфазных двигателях. Я 2 Потери R в однофазных двигателях с дробной мощностью могут достигать 30 процентов. Потери намагничивания в сердечниках статора и ротора вызывают потерю эффективности от 1 до 7 процентов. Потери на трение в подшипниках и неэффективность охлаждающих вентиляторов приводят к потерям от 0,5% до 1,5%. в КПД двигателя.Потери на трение и намагничивание не зависят от нагрузки двигателя и относятся исключительно к размер и конструкция двигателя. Остальные потери называются потерями паразитной нагрузки. Сильно недогруженные двигатели имеют более низкий КПД, потому что трение, ветер и потери в сердечнике остаются постоянными и включают все больший процент от общей потребляемой мощности двигателя. На рисунке ниже показаны различные компоненты потери двигателя в зависимости от нагрузки двигателя.
Конструкционные материалы, механическая и электрическая конструкция двигателя определяют его окончательный вариант. эффективность.В энергоэффективных двигателях используются высококачественные материалы и оптимизированная конструкция. для достижения более высокой эффективности. Медный провод большого диаметра в статоре и больше алюминия в ротор снижает потери сопротивления энергоэффективного двигателя. Улучшенная конфигурация ротора а оптимизированный воздушный зазор между ротором и статором снижает потери паразитной нагрузки. Оптимизированное охлаждение Конструкция вентилятора обеспечивает хорошее охлаждение двигателя с минимальными потерями на ветер. Тоньше и выше качественные стальные пластины в роторе и сердечнике статора позволяют энергоэффективному двигателю работают с существенно меньшими потерями на намагничивание.Высококачественные подшипники приводят к уменьшению потери на трение.
Анализ экономии
При рассмотрении энергоэффективных двигателей на срок окупаемости влияют два фактора: стоимость электроэнергии и эксплуатационные расходы. часов в год. Если электричество недорогое или время работы невелико, на установку может уйти несколько лет. экономия от установки высокоэффективных двигателей, чтобы перевесить разницу в первоначальной стоимости. С другой стороны, где затраты на электроэнергию и количество часов работы в год высоки, можно заменить существующий двигатель стандартного КПД с энергоэффективным двигателем и получение зарплаты менее одного года (таблица 2).Кроме того, экономические преимущества энергоэффективных двигателей по сравнению с двигателями с перемоткой часто дают возможность для перехода на энергоэффективные двигатели, когда старые двигатели сгорают.
|
ТАБЛИЦА 2 Матрица выбора двигателя с примером двигателя мощностью 10 л.с. Многофазный асинхронный двигатель переменного тока |
||||
| Стандартный двигатель | Высокоэффективный двигатель | |||
| А | В | К | ||
| 1. Первая стоимость | 180 долларов США | 224 долл. США | 252 долл. США | 279 долл. США |
| 2. % Срок службы = Годовая стоимость | 22,50 долл. США | 28,00 долл. США | 31,50 долл. США | $ 34,88 |
| 3. Требуемая электроэнергия (кВт) | 8,78 | 8,52 | 8,43 | 8,38 |
| 4. часов использования / год | 4 000 | 4 000 | 4 000 | 4 000 90 524 |
| 5. КПД | 85,0 | 87,5 | 88,5 | 89,0 |
| 6. кВтч / год ** | 35 120 | 34 080 | 33 720 | 32 520 90 524 |
| 7. Стоимость / кВтч (энергия + спрос) | 0,06 доллара США | 0,06 доллара США | 0,06 доллара США | 0,06 долл. США |
| 8. Годовые затраты на электроэнергию | 2 107 долл. США | 2 045 долл. США | 2 023 долл. США | 2 011 долл. США 90 524 |
| 9. Разница в стоимости электроэнергии | -0- | 62,00 $ | 84,00 $ | 96,00 $ |
| 10. Общая годовая стоимость | 2130 долл. США | 2 073 долл. США | 3055 долл. США | 2 046 долл. США 90 524 |
| 11. Окупаемость — годы *** | -0- | 0,71 | 0,86 | 1,03 |
Источник: публикация NEMA MG-1.
Похожие записи
| ||||