Что такое энкодер и как он работает. Какие бывают типы энкодеров. Где применяются энкодеры в промышленности и робототехнике. Каковы преимущества использования энкодеров в системах управления.
Что такое энкодер и принцип его работы
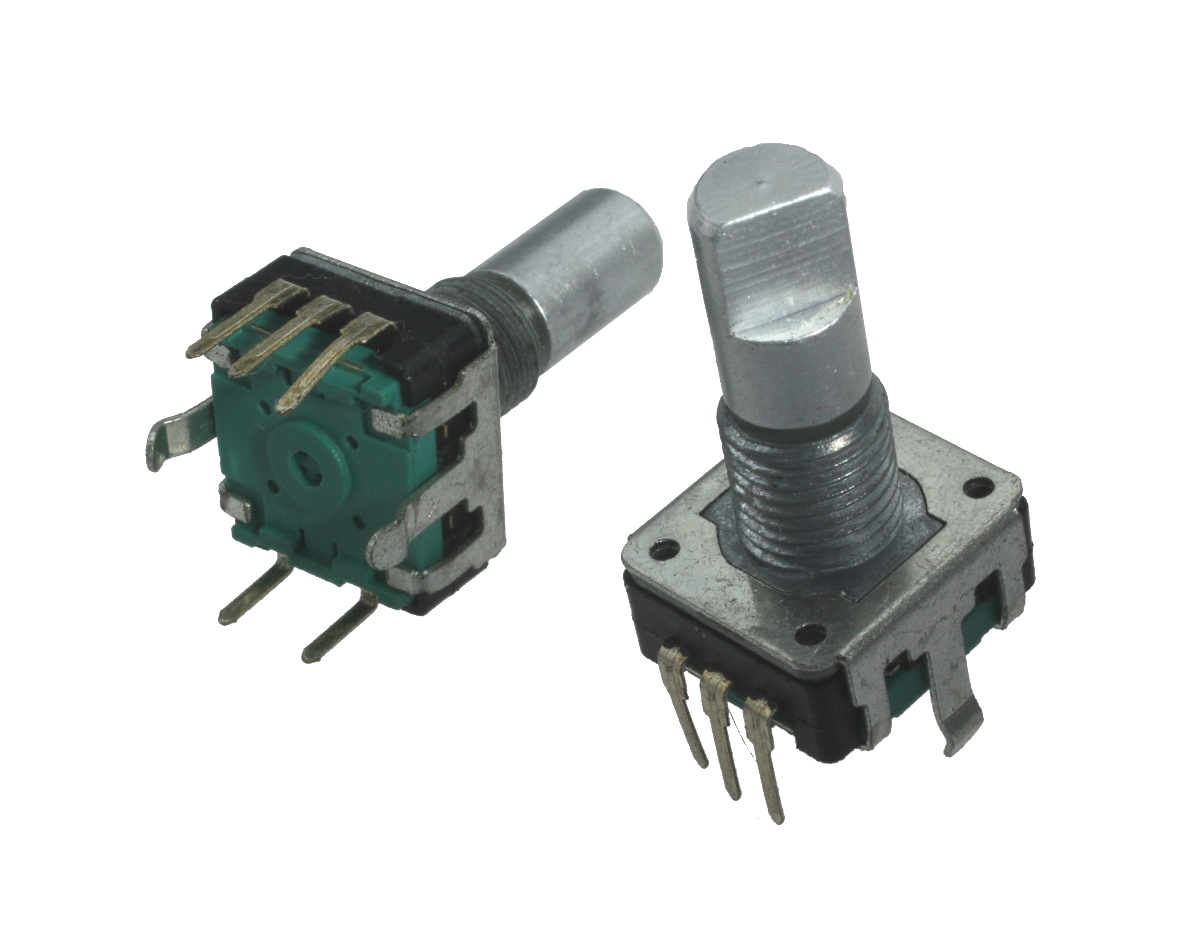
Энкодер (датчик угла поворота) — это электромеханическое устройство, которое преобразует угловое положение вала или оси в электрические сигналы. Основная задача энкодера — предоставить информацию о движении и положении в системах управления.
Принцип работы энкодера заключается в следующем:
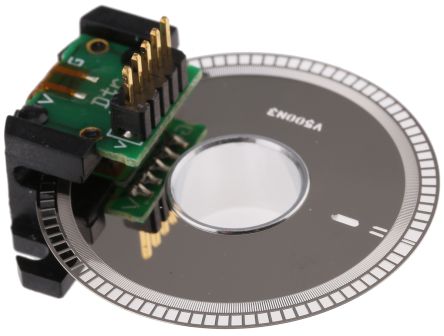
- На вращающемся диске энкодера нанесены метки (штрихи)
- Источник света (обычно светодиод) светит на диск
- При вращении диска световой поток прерывается метками
- Фотоприемник регистрирует изменения светового потока
- Электронная схема преобразует сигналы фотоприемника в импульсы
- Контроллер обрабатывает импульсы и определяет параметры движения
Таким образом, энкодер позволяет измерять угол поворота, скорость вращения, направление движения и пройденный путь. Эта информация используется системой управления для точного позиционирования и контроля движения механизмов.

Основные типы энкодеров
Существует два основных типа энкодеров:
1. Инкрементальные энкодеры
Инкрементальные энкодеры генерируют импульсы при вращении вала. Они позволяют определить:
- Скорость вращения — по частоте импульсов
- Направление вращения — по сдвигу фаз между двумя сигналами
- Угол поворота — путем подсчета импульсов
Преимущества инкрементальных энкодеров:
- Простая конструкция
- Низкая стоимость
- Высокое разрешение
2. Абсолютные энкодеры
Абсолютные энкодеры выдают уникальный цифровой код для каждого углового положения вала. Их особенности:
- Определение точного положения сразу после включения
- Сохранение информации о положении при отключении питания
- Отсутствие необходимости в поиске референтной метки
Недостатки абсолютных энкодеров — более сложная конструкция и высокая стоимость.
Где применяются энкодеры
Энкодеры широко используются в различных отраслях промышленности и робототехнике:
- Станки с ЧПУ — для точного позиционирования инструмента
- Промышленные роботы — для управления движением манипуляторов
- Конвейерные линии — для контроля скорости и положения
- Лифты — для определения положения кабины
- Упаковочные машины — для синхронизации движений
- Печатное оборудование — для точного позиционирования печатающих головок
- Измерительные системы — для определения линейных перемещений
Преимущества использования энкодеров
Применение энкодеров в системах управления движением дает ряд важных преимуществ:
- Высокая точность позиционирования
- Возможность определения скорости и ускорения
- Контроль направления вращения
- Возможность обнаружения пропуска шагов
- Простота интеграции с цифровыми системами управления
- Надежность и долговечность конструкции
Как выбрать энкодер для конкретной задачи
При выборе энкодера следует учитывать несколько ключевых параметров:
- Тип энкодера (инкрементальный или абсолютный)
- Разрешение (количество импульсов на оборот)
- Максимальная скорость вращения
- Тип выходного сигнала
- Степень защиты от внешних воздействий
- Размеры и способ монтажа
Правильный выбор энкодера позволит обеспечить требуемую точность и надежность работы системы управления движением.
Интеграция энкодеров в системы управления
Для эффективного использования энкодеров в системах управления необходимо:
- Подключить энкодер к контроллеру или драйверу двигателя
- Настроить параметры обработки сигналов энкодера
- Реализовать алгоритмы обратной связи по положению и скорости
- Обеспечить фильтрацию сигналов для устранения помех
- Предусмотреть обработку аварийных ситуаций при сбоях энкодера
Правильная интеграция энкодера позволит реализовать точное управление движением в автоматизированных системах.
Тенденции развития энкодеров
Основные направления совершенствования энкодеров:
- Повышение разрешающей способности
- Уменьшение габаритов
- Интеграция дополнительных датчиков (температуры, вибрации)
- Реализация беспроводной передачи данных
- Применение новых материалов для повышения надежности
- Интеграция функций самодиагностики
Развитие технологий энкодеров позволяет создавать все более совершенные системы управления движением для различных отраслей промышленности.
Шаговые двигатели с энкодером ШДЭ42‑2,8‑8
Описание в PDF
Технические характеристики
| Полный шаг двигателя, град | 1,8 |
| Погрешность углового шага, град | ±0,09 |
| Максимально допустимая радиальная нагрузка на вал на расстоянии 20 мм от фланца, Н | 28 |
| Максимально допустимая осевая нагрузка на вал, Н | 10 |
| Тип энкодера | оптический инкрементный |
| Разрешение энкодера, имп/об | 1000 |
Скачать паспорт .pdfОписание .pdf
Шаговые двигатели ШДЭ42‑2,8‑8 оснащены встроенным оптическим инкрементным энкодером с разрешением 1000 имп/оборот.
Значительный крутящий момент и встроенный энкодер позволяют использовать эти двигатели в устройствах точного позиционирования, в аналитическом приборостроении. Также они могут использоваться в микроманипуляторах, устройствах подачи растворов, полуавтоматах многопараметрового контроля, оборудовании для отбора проб, автоматических анализаторах, перемешивающих устройствах и приборах для анализа нефтепродуктов. Для удобного крепления двигателей мы предлагаем кронштейны. Подобрать кронштейн для крепления здесь
Исполнения шаговых двигателей серии ШД42
Шаговый двигатель
ШДЭ42‑2,8‑8
Момент 8 кгс*см
Фланец 42 x 42 мм
Индуктивность
2. 3 мГн
3 мГн
Сопротивление 2.7 Ом
Инерция ротора 115 г*см2
Заказать
Габаритные размеры шаговых двигателей с энкодером ШДЭ42‑2,8‑8
Электрическая схема шаговых двигателей ШДЭ42‑2,8‑8
Сигналы энкодера шаговых двигателей ШДЭ42‑2,8‑8
| EB+ | Зеленый |
|---|---|
| EB- | Желтый |
| EA+ | Коричневый |
| EA- | Белый |
| VCC | Красный |
| GND | Синий |
С этим товаром покупают
-
SMD‑2.
 8DIN
8DIN
Драйверы шаговых двигателей
подробнее -
SMSD‑4.2RS
Программируемый контроллер шаговых двигателей
подробнее -
Муфта SJC
Безлюфтовая упругая муфта
подробнее -
EDR-150-24 MW
Источник питания
подробнее
Связаться с нами
Хотите узнать дополнительную информацию о продукции — задайте вопрос. Наш специалист свяжется с вами в ближайшее время.
Использование энкодера — Национальная сборная Worldskills Россия
“
В этом уроке мы познакомимся с инкрементальным магнитным энкодером, который поставляется в комплекте оборудования WorldskillsMobile Robotic Collection, а также с программируемой логической интегральной схемой ПЛИС. Совместим полученные знания и напишем код на ПЛИС, интегрируем его в наше устройство и запустим все в реальном времени. Начнем.
Глоссарий
Для успешного освоения материала рекомендуем вам изучить следующие понятия:
Официальный соревновательный набор чемпионата WorldSkills International по компетенции «Мобильная Робототехника»
Программируемая Логическая Интегральная Схема
Устройство подсчета угла поворота оси
Field-Programmable Gate Array, разновидность ПЛИС, конфигурация которой может быть загружена после включения питания
Видеолекция
Конспект
Энкодер
Энкодер (датчик угла поворота) — это электромеханическое устройство, предназначенное для преобразования углового положения вала или оси в электрические сигналы.
Существуют два основных типа.
Инкрементальный
Инкрементальный энкодер формирует импульсы, число которых пропорционально углу поворота. Подсчет числа этих импульсов дает величину угла поворота вала и кодера относительно его начального положения. Этот тип энкодеров не формирует выходные импульсы, когда его вал находится в покое.
Применение:
- индустриальные средства управления
- бытовая и музыкальная техника
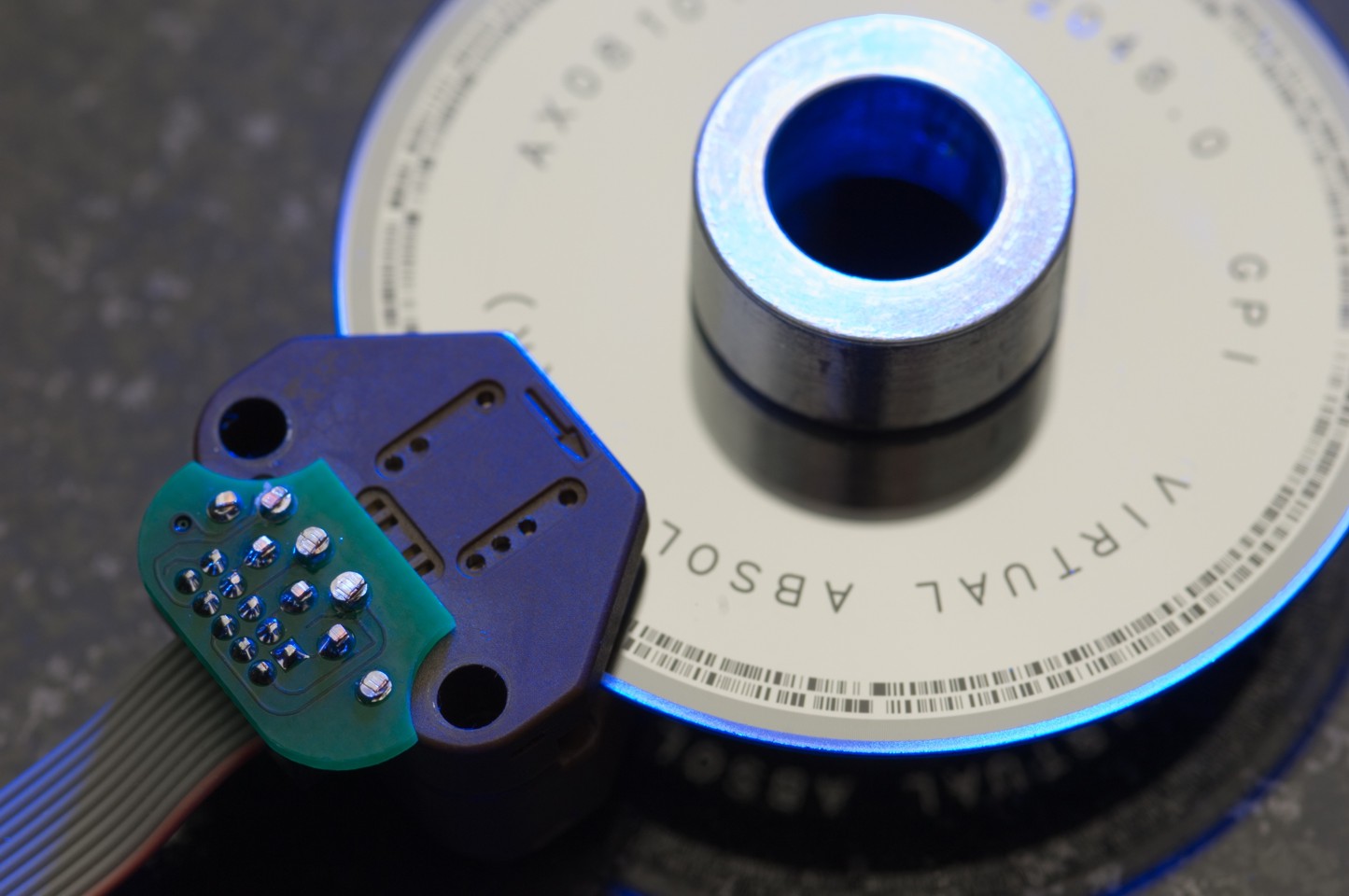
Магнитный
Энкодер, в котором преобразование углового перемещения вала в электронный сигнал реализуется бесконтактно на основе эффекта Холла; допускает обработку сигналов на скоростях до 60 000 оборотов в минуту. В магнитном энкодере на скоростное вращение внешнего вала, на котором закреплен цилиндрический постоянный магнит, воспринимается датчиком Холла совмещенным на одном полупроводниковом кристалле с контроллером обработки сигналов. При вращении полюсов постоянного магнита над микросхемы с датчиком Холла, переменный вектор магнитной индукции наводит напряжение Холла, содержащее информацию о мгновенном значении угла поворота вала.
При вращении полюсов постоянного магнита над микросхемы с датчиком Холла, переменный вектор магнитной индукции наводит напряжение Холла, содержащее информацию о мгновенном значении угла поворота вала.
Микроконтроллер обеспечивает быстрое преобразование напряжения Холла, параметр угла позиционирования. Возможность такого преобразования без непосредственного механического соединения элементов магнита и датчика Холла является основным преимуществом магнитных энкодеров, обеспечивает им высокую надежность и долговечность.
Применение:
- высокоскоростные приложения, связанные с промышленной автоматизацией, полиграфией, металлообработкой
- инструментально-измерительное оборудование
Программируемые логические интегральные схемы отличаются тем, что, программируя устройство, вы сами создаете архитектуру из базовых логических элементов. Таким образом, вы получаете:
- высокое быстродействие
- гибкость микросхемы
- возможность, не изменяя ни одного чипа, делать целый ряд проектов.

В нашем микроконтроллере используется вид ПЛИС под FPGA. Микросхема FPGA — это заказная микросхема ASIC, состоящая из таких же транзисторов, из которых собираются триггеры, регистры, мультиплексоры и другие логические элементы для обычных схем.
Возможности
Можно изменять коммутацию сигналов между более крупными блоками (CLB — программируемые логические блоки)
Можно изменять логическую функцию, которую выполняет CLB
Можно обеспечить разную коммутацию сигналов между CLB, так как блоки CLB находятся в коммутационной матрице, которая задает соединение входов и выходов блоков CLB. На каждом пересечении проводников находятся 6 переключающих ключей, управляемых своими ячейками конфигурационной памяти
Практика
Создадим VI для написания кодов FPGA.
1. Откроем проект и перейдем к устройству Mario Chassis.
2. Создадим новую VI и разделим фронт панели блока диаграмм пополам.
Принцип работы энкодера
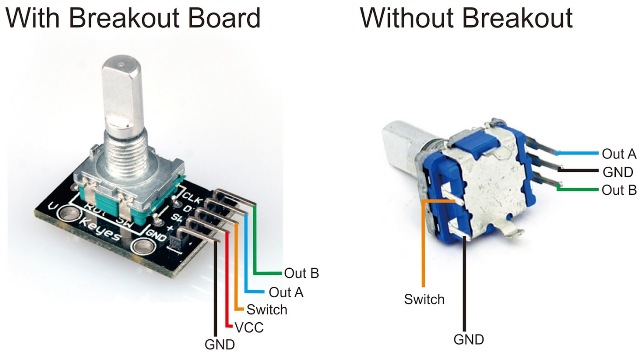
Когда вал энкодера вращается, на выходах контроллера появляются два прямоугольных сигнала, сдвинутых относительно друг друга. От направления вращения вала энкодера зависит, какой из сигналов будет опережать другой.
На рисунке представлены возможные варианты сигналов для идеального случая. Чтобы написать код, воспользуемся картинкой ниже.
1. Перепишем этот код на нашу блок-диаграмму и создадим 2 контроля Source А и Source В.
2. Нажмем правой кнопкой мыши на передней панели. Boolean и Push-button. Source A и Source B
3. На блок-диаграмме находим элемент Exclusive Or. Делаем три его копии.
4. На рисунке видим, что от Source A создается ссылка в конце итерации считывания этих данных.
5. Сделаем так, чтобы этот индикатор был значением предыдущей итерации цикла нашего Source A. Воспользуемся элементом Feedback node. Нам необходимо передавать предыдущее значение Source A в Y нашего Exclusive for.
Нам необходимо передавать предыдущее значение Source A в Y нашего Exclusive for.
Для этого:
- нажмем правой кнопкой мыши по Feedback Node’у
- нажмем кнопочку change Direction.
Теперь с выхода Source A на X будет подаваться свежее значение Feedback Node’а. На Y будет подаваться значение с предыдущей операции, делаем то же самое для Source B и второго Exclusive for.
6. Подключаем к X значение Source A, к Y — последнее значение Source B.
7. Выполняем логическое сложение двух верхних элементов.
8. Следующим элементом будет Node Exclusive Or.
Важно
Обратите внимание, что эти элементы почти никак друг от друга не отличаются, кроме точки на конце этого элемента
9. Воспользуемся функцией Select для прибавления или вычитания 1 от позиции нашего энкодера.
10. Создадим константу единицы. Зайдем в Numeric — Numeric constant, на True подключаем 1; с помощью зажатой клавиши Ctrl делаем копию и указываем на этой копии -1.
Создадим константу единицы. Зайдем в Numeric — Numeric constant, на True подключаем 1; с помощью зажатой клавиши Ctrl делаем копию и указываем на этой копии -1.
11. Результат селекта складываем и данный результат с помощью Selecta обрабатываем.
Обработка результата
В случае, если True, то мы будем добавлять или уменьшать какое-либо значение. Данный select будет отвечать за то, двигается ли наш энкодер, т. е. вращается ли вал. Нижнее значение будет проходить дальше на итоговое значение, которое будет выдаваться в нашем реалтайме, с которым в дальнейшем мы будем работать. На False выдается результат вычисления, на True — ноль. Ноль, потому что с помощью данного selecta мы будем обновлять значение энкодера.
Зададим с последнего селекта индикатор, назовем его Position.
Упрощение кода
Чтобы упростить код, можно удалить Direction и изменить направление считывания в реалтайме.
1. Удалим данный элемент и подключим Exclusive or к нашему селектору.
Удалим данный элемент и подключим Exclusive or к нашему селектору.
2. Вместо плюса воспользуемся элементами Increment и Decrement
3. К нашему +1 и -1 необходимо передать значения с нашей позиции. Делаем это с помощью Feedback Node.
4. Удалим константы +1 и -1, подключим на True.
5. На False подключаем значение с Feedback node’a.
Важно
Если наш вал вращается, выполняется условие и определяется, в какую сторону необходимо вращение. Соответственно, прибавляется единица или вычитается. Если у нас вал не вращается, то позиция не изменяется и передается такой же, которая была на предыдущей итерации цикла
Теперь необходимо узнать, куда подключены выходы нашего энкодера. Для этого подключим его к myRIO и посмотрим с помощью IO монитора. Подключаем энкодер и элемент питания к драйверу.
Запуск
1. Подключимся к RIO и запустим утилиту.
2. Переходим во вкладку с цифровыми Digital Input / Output (цифровые входы и выходы).
3. Выберем доступные всем цифровые входы и выходы и посмотрим, что будет изменяться.
4. Определим, к каким входам подключен энкодер.
5. Возьмем мотор и покрутим колесо. Результат: DIO-3 и DIO-4 меняются. Соответственно, два DIO выхода — это DIO-3 и DIO-4.
6. Перейдем в LabVIEW и напишем для этого код.
7. Добавим вместо Source А и Source B наш вход с коннектора А, диапазон DIO-7 DIO-0, и найдем DIO-3 и DIO-4.
8. Перенесем их на нашу блок-диаграмму и подключим соответственно.
9. Поместим написанный код в структуру While loop, чтобы данные операции выполнялись постоянно.
Важно
В отличие от real-time, на ПЛИС не нужно указывать задержку, так как ПЛИС является довольно высокоскоростным устройством, и задержка нам будет только мешать
10. Запустим нашу программку, сохраним ее, назовем энкодер FPGA и укажем Use the local compile server.
Запустим нашу программку, сохраним ее, назовем энкодер FPGA и укажем Use the local compile server.
11. Нажимаем OK и ожидаем окончание компиляции FPGA-файла.
12. Покрутим наше колесо против часовой стрелки. Position считается в отрицательную сторону. Вращаем по часовой, Position считается в положительную сторону. Нажимаем Reset — позиция обнуляется.
Перенос ПЛИС на Real-time
1. В проекте под myRIO создаем новую VI.
2. Делим экран.
3. Обращаемся в библиотеку FPGA-interface и берем первый элемент — Open FPGA Reference.
4. Заходим в данный блок и указываем, например, с помощью бит-файла, который находится в папочке FPGA bit-files.
5. Указываем Resource name, наше устройство FPGA target RIO.
Важно
Есть два выхода: кластер ошибки и FPGA Reference out. По данному проводу будет идти информация, к которой мы будем обращаться в нашем цикле для считывания, например, значений с энкодера
6. Подключаем в цикл, затем оттуда же из FPGA interface возьмем элемент Read write control, подключим его на FPGA VI Reference, и в этом элементе появляются те названия контрольных индикаторов, которые мы создали в нашем ПЛИСе. К примеру, Reset, я растяну его чуть ниже — Position. На Reset создаю Control, на Position создаю Indicator. Указываю условие остановки цикла и ставлю задержку в этом цикле 10 мс. Запускаем и сохраняем.
Подключаем в цикл, затем оттуда же из FPGA interface возьмем элемент Read write control, подключим его на FPGA VI Reference, и в этом элементе появляются те названия контрольных индикаторов, которые мы создали в нашем ПЛИСе. К примеру, Reset, я растяну его чуть ниже — Position. На Reset создаю Control, на Position создаю Indicator. Указываю условие остановки цикла и ставлю задержку в этом цикле 10 мс. Запускаем и сохраняем.
“
В этом уроке мы узнали, что такое энкодер, что такое ПЛИС, написали код для энкодера на ПЛИС и воспользовались сконфигурированным ПЛИС на устройстве в real-time. Предлагаем вам проверить полученные знания!
Интерактивное задание
Для закрепления полученных знаний пройдите тест
| Стартуем! |
Программная логическая и импульсивная сборка
Программируемая логическая интегральная схема
Программный линейный интерактивный светодиод
Программируемая логическая интерактивная сборка
| Дальше |
| Проверить |
| Узнать результат |
Эффект Бора
Эффект Тора
Эффект Хлора
Эффект Холла
| Дальше |
| Проверить |
| Узнать результат |
Складывать
Умножать
Делить
Возводить в степень
| Дальше |
| Проверить |
| Узнать результат |
К сожалению, вы ответили неправильно
Прочитайте лекцию и посмотрите видео еще раз
| Пройти еще раз |
Неплохо!
Но можно лучше. Прочитайте лекцию и посмотрите видео еще раз
Прочитайте лекцию и посмотрите видео еще раз
| Пройти еще раз |
Отлично!
Вы отлично справились. Теперь можете ознакомиться с другими компетенциями
| Пройти еще раз |
Введение в кодировщик | Encoder Product Company
Если вы используете Google, чтобы узнать значение этого кодировщика, используйте кодировщик для большого разнообразия ответов. Para nuestro proósito, лос-энкодеры се utilizan en maquinaría para el control de movimiento. Кодировщики Лос-се encuentran en muchas máquinas де Todas лас Industrias. Encontrará Que Los Encoders Son utilizados en aplicaciones de corte a medida, trazadores, robótica, empaquetadoras, transporte,autotización, clasificación, relleno, imagen, y mucho, mucho, más. Quizás nunca los ha notado, pero están allí. En Эсте блог, ле Daremos уна introducción muy básica де ло дие эс ип кодировщик у ло дие Hace.
¿Qué es un encoder?
En pocas palabras, un encoder es un dispositivo de detección que proporciona una respuesta. Los Encoders convierten el movimiento en una señal eléctrica que puede ser leída por algún typeo de dispositivo de control en un sistema de control de movimiento, tal como un mostrador o PLC. Кодировщик envía una señal де respuesta дие puede сер utilizado пункт determinar ла posición, contar, velocidad о dirección. Un dispositivo de control puede usar esta información para enviar un comando para una función частности. Количество:
Los Encoders convierten el movimiento en una señal eléctrica que puede ser leída por algún typeo de dispositivo de control en un sistema de control de movimiento, tal como un mostrador o PLC. Кодировщик envía una señal де respuesta дие puede сер utilizado пункт determinar ла posición, contar, velocidad о dirección. Un dispositivo de control puede usar esta información para enviar un comando para una función частности. Количество:
- En una aplicación de corte a medida, un Encoder con una rueda de medición indica al dispositivo de control la cantidad de material que se ha alimentado, por lo que el dispositivo de control sabe cuándo cortar.
- En un observatorio, los Encoders le dicen a los actuadores cuál es la posición de un espejo móvil en proporcióndo información de posicionamiento.
- En gatos de elevación de coches de ferrocarril, la retroalimentación de precisión de movimiento es proporcionado por los Encoders, para que así los gatos de elevación levanten simultáneamente.

- En un sistema de aplicación de etiquetas servo de precision, la señal del Encoder es utilizado por el PLC para controlar el tiempo y la velocidad de rotación de la botella.
- En una aplication de impresión, la retroalimentación desde el Encoder se activa un cabezal de impression para crear una marca en una ubicación específica.
- En una grúa grande, los encoders montados en un eje del motor propporcionan información de posicionamiento de modo que la grúa sabe cuándo debe recoger o soltar su carga.
- En una aplicación en la Que se están llenando botellas o frascos, el Encoder le dice a las máquinas de llenado de la posición de los contenedores.
- En un ascensor, los encoders le dicen al controlador cuando el coche ha llegado al piso correcto, en la posición correcta. Es decir, la retroalimentación de movimiento del encoder para el controlador del ascensor se asegura de que las puertas del ascensor abierto estén a nivel con el suelo. Sin los Encoders, puede que se encuentre buscando dentro o fuera de un ascensor, en lugar de simplemente caminar hacia fuera sobre un suelo nivelado.
- En las lineas de montaje Automaticizadas, los Encoders dan retroalimentación de movimiento los robots. En una línea de montaje de automóviles, esto podría significar la garantía de que los brazos robóticos de soldadura tienen la información correcta para Soldar en los lugares correctos.
En cualquier aplicación, el proceso es el mismo: un recuento es generada por el encoder y se envía al controlador, que a continuación, envía una señal a la maquina para realizar una función.
¿Как работает кодировщик?
Los Enocoders используют различные типы технологий для создания единого устройства, включающего: механическое, магнитное, оптическое и резистентное – оптическое для общего пользования. En detección óptica, el encoder propporciona información basada en la interrupción de la luz.
Графический интерфейс описывает базовую конструкцию энкодера с инкрементальной оптической технологией. Un haz де luz emitida por ип LED pasa través del disco de código, que está modelada con líneas opacas (muy аналогичный лос-радио де уна rueda де bicicleta). A medida дие эль eje дель кодер gira, ла Вига де Лус дель LED эс interrumpida пор лас линии opacas en эль-диско де código антеса де сер recogido пор ла Asamblea Fotodetectora. Esto произвести una señal de pulso: luz = encendido; грех луз = апагадо. La señal себе envía аль contador о controlador, дие су Вез enviará ла señal пункт producir ла función deseada.
A medida дие эль eje дель кодер gira, ла Вига де Лус дель LED эс interrumpida пор лас линии opacas en эль-диско де código антеса де сер recogido пор ла Asamblea Fotodetectora. Esto произвести una señal de pulso: luz = encendido; грех луз = апагадо. La señal себе envía аль contador о controlador, дие су Вез enviará ла señal пункт producir ла función deseada.
¿Cuál es la diferencia entre los encoders absoluto y los encoders incrementales?
Los encoders pueden producir señales ya sea incrementales o absolutas. Las señales incrementales no indican la posición específica, solo que la posición ha cambiado. Los Encoders absolutos, por otra parte, utilizan una «palabra» diferente para cada posición, lo que significa que un encoder absoluto propporciona tanto la indicación de que la position ha cambiado y una indicación de la posición absoluta del encoder.
Подробная информация о функциях энкодеров, дополнительная информация в WP-2011 «Основы работы энкодера», основные концепции раздела энкодеров в Руководстве по установке и подключению EPC . Literatura en español de nuestros productos está disponible para su descarga inmediata.
Literatura en español de nuestros productos está disponible para su descarga inmediata.
Si tiene preguntas acerca de cómo un encoder va a trabajar en su aplicación específica, no dude en ponerse en contacto con nosotros. Cuando se llama EPC, se habla con expertos de encoders que pueden responseer todas sus preguntas.
Кодировщик в цифровой логике — GeeksforGeeks
Кодировщик — это цифровая схема, которая преобразует набор двоичных входных данных в уникальный двоичный код. Двоичный код представляет позицию входа и используется для идентификации конкретного активного входа. Кодировщики обычно используются в цифровых системах для преобразования параллельного набора входных данных в последовательный код.
- Основной принцип энкодера заключается в присвоении каждому возможному входу уникального двоичного кода.
 2 = 4 возможных входных комбинаций.
2 = 4 возможных входных комбинаций. - Выход энкодера обычно имеет активный низкий уровень, что означает, что только один выход активен (низкий уровень) в любой момент времени, а остальные выходы неактивны (высокий уровень). Активный низкий выход выбирается на основе двоичного кода, присвоенного активному входу.
- Существуют различные типы энкодеров, в том числе энкодеры с приоритетом, которые назначают приоритет каждому входу, и двоично-взвешенные энкодеры, которые используют двоичную систему взвешивания для присвоения двоичных кодов входам.
- Таким образом, энкодер представляет собой цифровую схему, которая преобразует набор двоичных входных данных в уникальный двоичный код, представляющий позицию входа. Кодировщики широко используются в цифровых системах для преобразования параллельных входных данных в последовательные коды. 9n входных строк с ‘n’ битами.
Энкодер 4:2 –
Энкодер 4 на 2 состоит из четырех входов Y3, Y2, Y1 и Y0 и двух выходов A1 и A0 .
 В любой момент только один из этих 4 входов может быть «1», чтобы получить на выходе соответствующий двоичный код. На рисунке ниже показан логический символ энкодера 4 на 2: Таблица истинности энкодера 4 на 2 выглядит следующим образом: Логическое выражение для A1 и A0:
В любой момент только один из этих 4 входов может быть «1», чтобы получить на выходе соответствующий двоичный код. На рисунке ниже показан логический символ энкодера 4 на 2: Таблица истинности энкодера 4 на 2 выглядит следующим образом: Логическое выражение для A1 и A0: A1 = Y3 + Y2 A0 = Y3 + Y1
Вышеуказанные две логические функции A1 и A0 могут быть реализованы с использованием двух входных логических элементов ИЛИ:
8 : 3 Энкодер (восьмеричный в двоичный) –
Энкодер 8 в 3 или восьмеричный в двоичный энкодер состоит из 8 входов : от Y7 до Y0 и 3 выходов : A2, A1 и A0. Каждая входная строка соответствует каждой восьмеричной цифре, а три выхода генерируют соответствующий двоичный код. На рисунке ниже показан логический символ восьмерично-двоичного энкодера: Таблица истинности для 8-3-кратного энкодера выглядит следующим образом: Логическое выражение для A2, A1 и A0:
A2 = Y7 + Y6 + Y5 + Y4 А1 = У7 + У6 + У3 + У2 А0 = Y7 + Y5 + Y3 + Y1
Вышеуказанные две логические функции A2, A1 и A0 могут быть реализованы с использованием четырех входных логических элементов ИЛИ:
Десятично-двоично-десятичный кодер –
Десятично-двоичный кодер обычно состоит из 10 входных строк и 4 выходных строк .
 Каждая входная строка соответствует каждой десятичной цифре, а 4 выхода соответствуют двоично-десятичному коду. Этот кодировщик принимает декодированные десятичные данные в качестве входных данных и кодирует их в двоично-десятичный код, который доступен на выходных линиях. На рисунке ниже показан логический символ десятичного кодера в двоично-десятичный: Таблица истинности десятичного кодера в двоично-десятичный выглядит следующим образом: Логическое выражение для A3, A2, A1 и A0:
Каждая входная строка соответствует каждой десятичной цифре, а 4 выхода соответствуют двоично-десятичному коду. Этот кодировщик принимает декодированные десятичные данные в качестве входных данных и кодирует их в двоично-десятичный код, который доступен на выходных линиях. На рисунке ниже показан логический символ десятичного кодера в двоично-десятичный: Таблица истинности десятичного кодера в двоично-десятичный выглядит следующим образом: Логическое выражение для A3, A2, A1 и A0: A3 = Y9 + Y8 А2 = У7 + У6 + У5 + У4 А1 = У7 + У6 + У3 + У2 A0 = Y9 + Y7 +Y5 +Y3 + Y1
Вышеуказанные две логические функции могут быть реализованы с помощью вентилей ИЛИ:
Приоритетный энкодер –
Энкодер с приоритетом от 4 до 2 имеет 4 входа : Y3, Y2, Y1 и Y0 и 2 выхода : A1 и A0. Здесь вход Y3 имеет наивысший приоритет , тогда как вход Y0 имеет самый низкий приоритет . В этом случае, даже если более чем один вход равен «1» одновременно, на выходе будет (двоичный) код, соответствующий входу, который имеет более высокий приоритет .
 Таблица истинности для приоритетного энкодера выглядит следующим образом: Вышеуказанные две булевы функции могут быть реализованы как: Недостатки обычных энкодеров –
Таблица истинности для приоритетного энкодера выглядит следующим образом: Вышеуказанные две булевы функции могут быть реализованы как: Недостатки обычных энкодеров – - Существует неоднозначность, когда все выходы энкодера равны нулю.
- Если активен более одного входа Высокий уровень, кодер выдает выходной сигнал, который может быть неверным кодом.
Итак, чтобы преодолеть эти трудности, мы должны назначить приоритеты каждому входу энкодера. Затем на выходе энкодера будет код (код, соответствующий активным высоким входам, имеющим более высокий приоритет. Использование энкодеров —
- Энкодеры — это очень распространенные электронные схемы, используемые во всех цифровых системах.
- Энкодеры используются для перевести десятичные значения в двоичные, чтобы выполнять двоичные функции, такие как сложение, вычитание, умножение и т. д.
- Другие приложения, особенно для приоритетных энкодеров, могут включать обнаружение прерываний в микропроцессорных приложениях.
Преимущества использования энкодеров в цифровой логике:
- Уменьшение количества линий: Энкодеры сокращают количество линий, необходимых для передачи информации с нескольких входов на один выход, что может упростить конструкцию системы и уменьшить стоимость комплектующих.
- Повышенная надежность: Преобразовывая несколько входных данных в один последовательный код, кодировщики могут снизить вероятность ошибок при передаче информации.
- Улучшенная производительность: кодировщики могут улучшить производительность цифровой системы за счет сокращения времени, необходимого для передачи информации с нескольких входов на один выход.
Недостатки использования энкодеров в цифровой логике:
- Повышенная сложность: энкодеры обычно представляют собой более сложные схемы по сравнению с мультиплексорами и требуют дополнительных компонентов для реализации.
- Ограничено конкретными приложениями: Энкодеры подходят только для приложений, в которых параллельный набор входов должен быть преобразован в последовательный код.

- Ограниченная гибкость: Кодировщики ограничены в своей гибкости, поскольку они могут кодировать только фиксированное количество входных данных в фиксированное количество выходных данных.
- В заключение, энкодеры представляют собой полезные цифровые схемы, которые имеют свои преимущества и недостатки. Выбор того, использовать кодировщик или нет, зависит от конкретных требований системы и компромисса между сложностью, надежностью, производительностью и стоимостью.
Угловые вопросы GATE CS Ответы на следующие вопросы помогут вам проверить свои знания. Все вопросы были заданы в GATE в предыдущие годы или в пробных тестах GATE. Настоятельно рекомендуется их практиковать.
- GATE CS 2013, вопрос 65
- GATE CS 2014 (набор 3), вопрос 65
Ссылки
Вот несколько книг, в которых можно найти дополнительную информацию о цифровой логике и энкодерах
- : :
- «Проектирование цифровых систем с использованием VHDL», Чарльз Х.
 Рот-младший и Лизи Куриан Джон
Рот-младший и Лизи Куриан Джон - «Цифровой дизайн и компьютерная архитектура», Дэвид Харрис и Сара Харрис
- «Принципы цифрового проектирования», Дэниел Д. Гайски, Фрэнк Вахид и Тони Гиваргис
- «Digital Circuit Design: An Introduction» Томаса Л. Флойда и Дэвида Мани Харриса
- «Цифровые основы» Томаса Л. Флойда
Эти книги охватывают различные темы цифровой логики и проектирования, включая энкодеры, и предоставляют -глубокая информация по теории, проектированию и реализации цифровых схем.
– Кодировщик – Википедия Приоритетный кодировщик – Википедия Эта статья предоставлена Harshita Pandey . Если вам нравится GeeksforGeeks и вы хотите внести свой вклад, вы также можете написать статью с помощью write.geeksforgeeks.org или отправить ее по адресу [email protected]. Посмотрите, как ваша статья появится на главной странице GeeksforGeeks, и помогите другим гикам. Пожалуйста, пишите комментарии, если вы обнаружите что-то неправильное, или вы хотите поделиться дополнительной информацией по теме, обсуждаемой выше.

