Как работает фазоимпульсное управление тиристором. Для чего оно применяется. Какие преимущества дает использование фазоимпульсного управления в силовой электронике.
Что такое фазоимпульсное управление тиристором
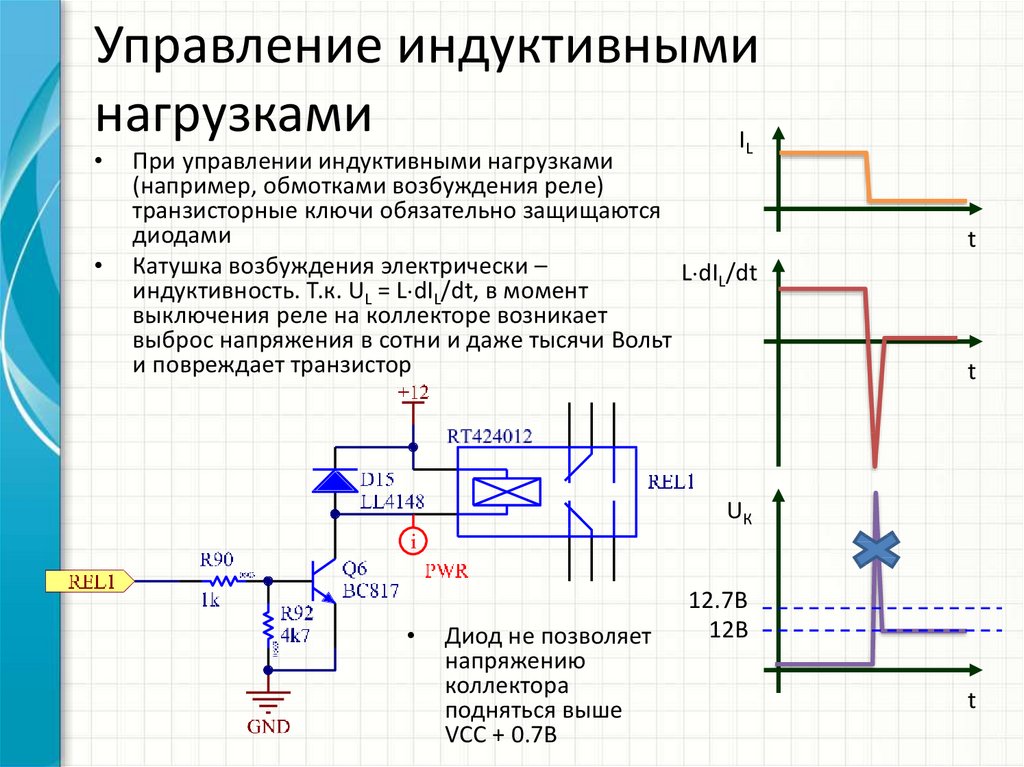
Фазоимпульсное управление тиристором — это способ регулирования мощности в цепях переменного тока путем изменения момента включения тиристора относительно фазы питающего напряжения. При этом методе управляющие импульсы подаются на тиристор в определенные моменты каждого полупериода переменного напряжения.
Основные особенности фазоимпульсного управления:
- Изменение угла включения тиристора позволяет плавно регулировать мощность в нагрузке
- Управление осуществляется короткими импульсами тока в цепи управляющего электрода
- Частота следования управляющих импульсов равна или кратна частоте питающей сети
- Момент подачи импульса определяет фазу включения тиристора
Принцип работы фазоимпульсного управления
Рассмотрим принцип работы фазоимпульсного управления на примере однофазной схемы:
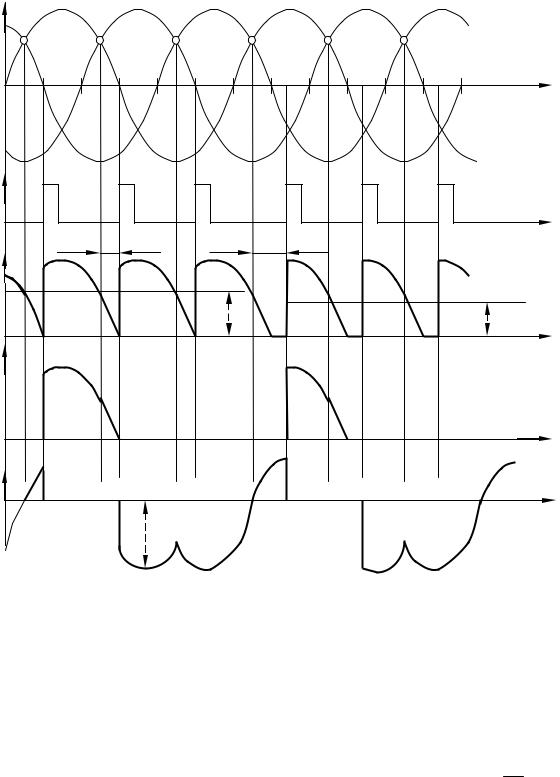
- В начале каждого полупериода тиристор закрыт и ток через нагрузку не протекает
- В определенный момент на управляющий электрод подается короткий импульс тока
- Тиристор открывается и начинает пропускать ток через нагрузку
- В конце полупериода при переходе напряжения через ноль тиристор закрывается
- Процесс повторяется в каждом полупериоде
Изменяя фазу подачи управляющего импульса, можно регулировать длительность открытого состояния тиристора и соответственно среднее значение тока через нагрузку.
Области применения фазоимпульсного управления
Фазоимпульсное управление тиристорами широко применяется в следующих областях:
- Регуляторы мощности и яркости освещения
- Управление электродвигателями переменного тока
- Источники питания с регулируемым выходным напряжением
- Электронагревательные устройства
- Системы плавного пуска электродвигателей
- Сварочное оборудование
Преимущества фазоимпульсного метода управления
Основные достоинства фазоимпульсного управления тиристорами:
- Высокий КПД за счет ключевого режима работы тиристора
- Возможность плавной регулировки мощности в широких пределах
- Простота реализации управляющей схемы
- Отсутствие механических контактов
- Малые габариты и вес регулирующего устройства
- Высокое быстродействие
Особенности реализации схем фазоимпульсного управления
При разработке устройств с фазоимпульсным управлением тиристорами необходимо учитывать ряд факторов:

- Выбор тиристора с подходящими параметрами по току и напряжению
- Обеспечение синхронизации управляющих импульсов с сетевым напряжением
- Формирование коротких управляющих импульсов требуемой амплитуды
- Защита тиристора от перенапряжений и перегрузок по току
- Подавление помех, создаваемых при коммутации тиристора
Правильный учет этих особенностей позволяет создавать надежные и эффективные устройства на основе фазоимпульсного метода управления.
Схемотехника систем фазоимпульсного управления
Типовая схема фазоимпульсного регулятора содержит следующие основные блоки:
- Силовой тиристорный ключ
- Устройство синхронизации с сетью
- Генератор управляющих импульсов
- Фазосдвигающее устройство
- Формирователь импульсов управления
- Схема защиты
Для реализации этих блоков применяются как аналоговые, так и цифровые схемотехнические решения. В современных устройствах широко используются микроконтроллеры, позволяющие гибко настраивать алгоритм управления.
Проблемы и ограничения фазоимпульсного управления
Несмотря на множество достоинств, фазоимпульсный метод имеет некоторые недостатки:
- Искажение формы потребляемого тока
- Генерация высших гармоник в питающую сеть
- Низкий коэффициент мощности при малых углах управления
- Возможность возникновения перенапряжений
- Сложность управления при индуктивной нагрузке
Для решения этих проблем применяются различные схемотехнические и алгоритмические методы. Например, использование фильтров, многоканальных схем, алгоритмов предиктивного управления и др.
Перспективы развития систем фазоимпульсного управления
Основные направления совершенствования фазоимпульсных регуляторов:
- Применение полностью управляемых полупроводниковых приборов (IGBT, MOSFET)
- Разработка цифровых алгоритмов управления на основе микропроцессоров
- Интеграция с системами управления верхнего уровня
- Повышение энергоэффективности и электромагнитной совместимости
- Миниатюризация и снижение стоимости устройств
Развитие этих направлений позволит расширить области применения фазоимпульсного метода и повысить его эффективность.
Фазоимпульсное управление
Форум Список пользователей Все разделы прочитаны Справка Расширенный поиск. Показано с 1 по 8 из 8. Тема: Управление вентиляторами с помощью ТТР. Maximusgg Просмотр профиля Сообщения форума Личное сообщение Просмотр статей.
Поиск данных по Вашему запросу:
Фазоимпульсное управление
Схемы, справочники, даташиты:
Прайс-листы, цены:
Обсуждения, статьи, мануалы:
Дождитесь окончания поиска во всех базах.
По завершению появится ссылка для доступа к найденным материалам.
Содержание:
- Русский Flowcode
- Управляемые выпрямители
- Фазоимпульсное управление тиристором circuit
- Выходные устройства
- Управляемые выпрямители
- PLCforum.
uz.ua
- Тиристорное управление асинхронным двигателем
- СОВЕТЫ ПРОФЕССИОНАЛОВ
- Фазоимпульсное управление силовым симистором
- Силовые блоки типа ФИУ фазоимпульсное управление.
 uz.ua
uz.uaПОСМОТРИТЕ ВИДЕО ПО ТЕМЕ: Фазоимпульсное управление 380В 18КВт
Русский Flowcode
Русский Flowcode Сайт русскоязычной поддержки программы Flowcode Пропустить. Фазоимпульсное управление симистором Раздел начинающих пользователей. Правила форума В песочнице можно спрашивать когда незнаешь где спросить. В песочнице нелзя посылать в гугл В песочнице можно задавать любой вопрос, но на него могут и неответить.
Песочница — попытка навести порядок. На песочницу большие надежды. Вот возник вопрос как сделать фазноимпульсное управление на симисторах 8 независимых каналов, везде инфа только для 1 канал. С Уважением Дмитрий. Поблагодарили: 0 раз. Пункты репутации: 0. Поблагодарили: 8 раз. Поблагодарили: раз. Пункты репутации: Собирайте проект-программу в FC и в таком виде придавайте огласке. Там и посмотрим че по чем. Страница Качая пресс, помните — живот рано или поздно обвиснет!
Ухаживая за лицом, знайте — старость всё равно неизбежна! Поэтому, не жалея сил, тренируйте мозги — за мудростью ваши недостатки будут менее заметны…. Поблагодарили: 2 раз. На быструю руку, один канал Реализация не лучшая через delei 2. Да ладно тебе Вы почему такой злюка 5. Лучше бы мне с фазометром помогли Поблагодарили: 36 раз.
Управляемые выпрямители
Фазоимпульсное управление тиристорами литература по теме. Сделали прибор фазоимпульсный тиристорный регулятор тока на базе пика пропорциональное регулирование. Надо его превратить в магистерскую дисертацию Подскажите где достать литературу по теме. Re: Фазоимпульсное управление тиристорами литература по теме. Сообщение от Kris.
Сделали прибор фазоимпульсный тиристорный регулятор тока на базе пика пропорциональное регулирование. Надо его превратить в магистерскую дисертацию Подскажите где достать литературу по теме. Re: Фазоимпульсное управление тиристорами литература по теме. Сообщение от Kris.
Фазоимпульсное управление, Программирование МК, Proton PicBasic.
Фазоимпульсное управление тиристором circuit
Я так понимаю, что симистор и ИМС включены последовательно. А потом усложняйте схему после получения желаемого результата. ИМС все таки питается от сети через нагрузку, а Вы последовательно включаете еще один симистор и момент открывания последнего так же влияет на работу ИМС. Схема регулирует угол открывания симистора, а не обороты вентилятора. Поэтому, изменение напряжения может по разному сказываться на работе и ИМС, и вентилятора, управляемого двумя симисторами в ИМС и внешний. Электродвигатель вентилятора асинхронный? Помогает шунтирование его мощным резистором — это облегчает работу симистора на индуктивную нагрузку.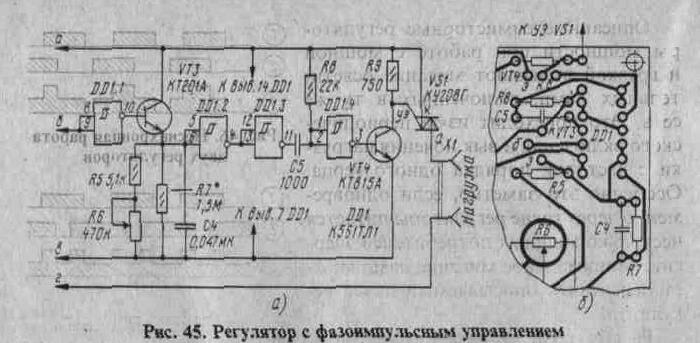 По картинкам на обеих осциллограммах период 4 клетки, то есть 20 мс. А откуда прибор намерял 44 Гц?
По картинкам на обеих осциллограммах период 4 клетки, то есть 20 мс. А откуда прибор намерял 44 Гц?
Выходные устройства
Группа: Проверенные. Сообщений: Статус: Offline. Сообщение отредактировал Broka — Сб, Страница 1 из 1 1.
Заявку на получение дополнительной информации по этому проекту можно заполнить здесь. Фазоимпульсное управление тиристором ФУТ предназначено для управления током электромагнитов.
Управляемые выпрямители
Конфиденциальность Правила. Правила форума. Может есть какие-нибудь примеры? Вернуться к началу. Re: [? А настоящее фазоимпульсное управление можно сделать и без контроллера — просто подавать пропорциональный аналоговый сигнал на специально собранную схему фазообрезателя поищии фазоимпульсное управление в Яндексе Картинка чисто для показа графика — чтобы понять какое быстродействие требуется для управления.
PLCforum.uz.ua
Сейчас этот форум просматривают: Google [Bot]. Предыдущее посещение: менее минуты назад Текущее время: 08 окт , Можно ли с помощью ШИМ управлять симистором??? Крупнейший производитель печатных плат и прототипов. Более клиентов и свыше заказов в день! Добавлено: 13 авг , В одной статье по управлении мощной нагрузкой описывается метод с помощью симистора и оптодрайвера у меня оптодрайвер без ZeroCrossing цепи! Вопрос: можно ли реализовать диммер с помощью ШИМ из мк???
Более клиентов и свыше заказов в день! Добавлено: 13 авг , В одной статье по управлении мощной нагрузкой описывается метод с помощью симистора и оптодрайвера у меня оптодрайвер без ZeroCrossing цепи! Вопрос: можно ли реализовать диммер с помощью ШИМ из мк???
Фазоимпульсное управление симистором. Сообщение nika-rijik (Дмитрий)» 03 фев , Доброго дня всем. Вот возник вопрос как сделать.
Тиристорное управление асинхронным двигателем
Фазоимпульсное управление
Многие конструкции подразумевают управление мощной нагрузкой. М-а на силовом транзисторе. Если же нужно регулировать мощную нагрузку в цепи переменного тока, то реализация сего выйдет немного посложней.
СОВЕТЫ ПРОФЕССИОНАЛОВ
ВИДЕО ПО ТЕМЕ: Диммер — управление переменным током на Arduino
Запомнить меня. Контроллер arduino своими руками Что такое фьюзы Fuse? Что такое Energia? Stellaris LaunchPad.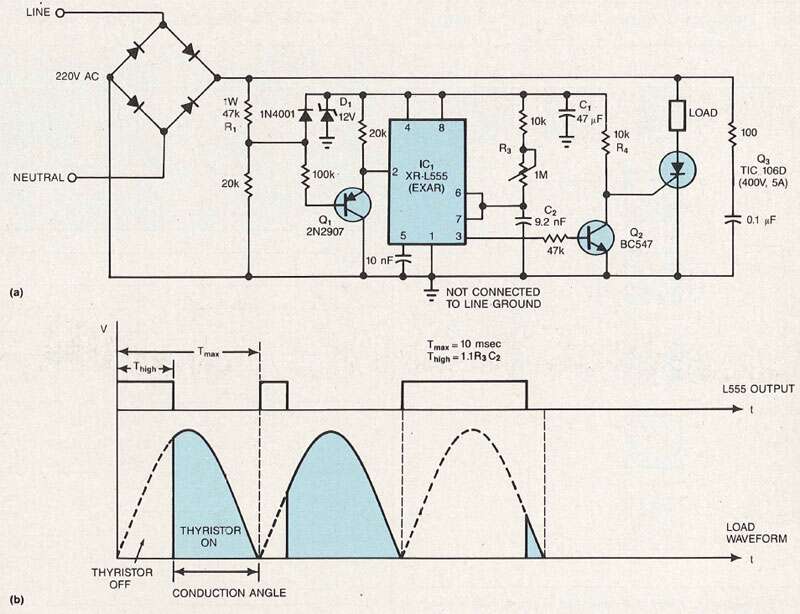
При работе нескольких выпрямителей на общую нагрузку, как это происходит в системе тягового электроснабжения постоянного тока, приходится учитывать, что выходное напряжение выпрямителей может отличаться друг от друга. Это вызвано как параметрами самих выпрямителей, так и различием напряжений в питающей сети.
Фазоимпульсное управление силовым симистором
В регуляторах Термодат для управления нагревателями и другими исполнительными устройствами используются следующие выходные устройства:. В приборах Термодат применяются реле двух типов. Реле РЭК — одно из лучших отечественных реле, имеет высокую надежность, способно коммутировать ток до 5А на активной нагрузке при переменном напряжении В. Реле BS фирмы Bestar имеет прекрасные характеристики, малые размеры, коммутирует до 10А при переменном напряжении до В. В большинстве приборов Термодат используется только один нормально разомкнутый контакт реле — то есть контакт реле разомкнут если прибор выключен. Однако, режим работы реле можно задать программно, изменяя параметры в третьем уровне режима настройки.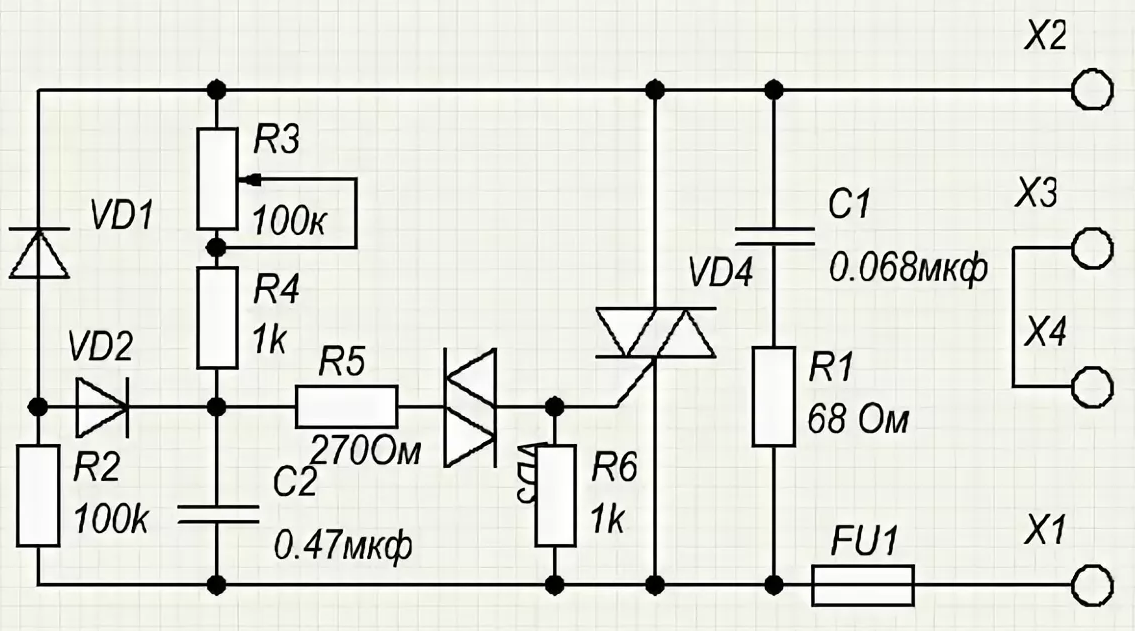 В одном режиме контакты реле буду замкнуты при температурах ниже уставки и разомкнуты при температуре выше уставки, в другом режиме контакты реле будут разомкнуты при температурах ниже уставки и замкнуты при температуре выше уставки.
В одном режиме контакты реле буду замкнуты при температурах ниже уставки и разомкнуты при температуре выше уставки, в другом режиме контакты реле будут разомкнуты при температурах ниже уставки и замкнуты при температуре выше уставки.
Силовые блоки типа ФИУ фазоимпульсное управление.
Перейти к содержимому. Особенности работы симистора. Защита симистора.
Симистор.Защита.Квадранты.Фазоимпульсное управление.- Elektrolife
Симистор – полупроводниковый прибор, который широко используется в устройствах, питающихся переменным напряжением. Упрощенно симистор может рассматриваться как управляемый выключатель. В закрытом состоянии он похож на разомкнутый тумблер. Но при подаче управляющего тока на управляющий электрод симистора, он переходит в проводящее состояние.При отсутствии управляющего тока симистор во время любого полупериода переменного напряжения питания неизбежно переходит из открытого в закрытое состояние.

Кроме работы в релейном режиме в термостате или светочувствительном выключателе, разработаны системы регулирования мощности, функционирующие по принципу фазоимпульсного управления напряжением нагрузки, или, другими словами, плавные регуляторы (диммеры).
Условно симистор можно представить двумя тиристорами, включенными параллельно-встречно. Он пропускает ток в обоих направлениях. Структура симистора показана на рисунке ниже.
Структура симистораСимистор имеет три электрода: управляющий и два для пропускания рабочего тока. Существуют различные варианты корпусов и цоколевок симисторов.
Особенности работы симистора. Квадранты.
Симистор открывается, если через управляющий электрод проходит отпирающий ток или если напряжение между его электродами А1 И А2 превышает некоторую максимальную величину. (При максимальной амплитуде напряжения питания может происходить несанкционированное срабатывание симистора). Симистор закрывается после изменения полярности между его выводами А1 и А2 или если значение рабочего тока меньше тока удержания Iуд.

В режиме переменного питания смена состояний симистора вызывается изменением полярности напряжения на рабочих электродах А1 и А2. И в зависимости от полярности управляющего тока можно определить четыре варианта управления симистором.
Четыре варианта управления симисторомИтак, например, если между рабочими электродами А1 и А2 симистора прикладывается напряжение больше нуля и напряжение на управляющем электроде отрицательно по отношению к аноду А1, то смещение симистора соответствует второму квадранту. Отпирающий ток (ток управляющего электрода) должен сохраняться до тех пор, пока ток между электродами А1 и А2 не превысит в два-три раза величину тока удержания. Этот минимальный отпирающий ток и является током включения симистора. Если убрать ток через управляющий электрод, симистор останется в проводящем состоянии до тех пор, пока анодный ток будет превышать ток удержания. Самым нежелательным для работы симистора является четвертый квадрант.
Ток управляющего электрода по квадрантамЕсть некоторые величины, которые могут быть критичными при работе симистора.
 Это величины скорости изменения напряжения (dV/dt) между анодами симистора и скорости изменения рабочего тока (di/dt).
Это величины скорости изменения напряжения (dV/dt) между анодами симистора и скорости изменения рабочего тока (di/dt).Во время перехода симистора из закрытого состояния в открытое внешней цепью может быть вызван значительный ток. В то же время мгновенного падения напряжения на рабочих электродах не происходит. А значит, одновременно будут присутствовать напряжение и ток, развивающие мгновенную мощность, которая может достигнуть значительных величин. Рассеиваемая энергия вызовет резкое повышение температуры p-n переходов. При превышении критической температуры, вызванным чрезмерной скоростью нарастания тока di/dt, симистор может разрушиться.
Симистор характеризуется скоростью нарастания напряжения в закрытом состоянии и открытом. Последнее также называется скоростью переключения).
При чрезмерной скорости нарастания напряжения на электродах А1 и А2 закрытого симистора, он может открыться даже при отсутствии сигнала на управляющем электроде. Это явление вызывается внутренней емкостью симистора.
 Ток заряда этой емкости может быть достаточным для отпирания симистора.
Ток заряда этой емкости может быть достаточным для отпирания симистора.Но не только это является причиной несвоевременного открытия. Как правило максимальная величина dV/dt не велика и слишком быстрое изменение напряжения на выводах симистора в момент его запирания может вызвать новое включение. Симистор заново отпирается, в то время как должен закрыться.
Защита симистора
Для защиты от внешних перенапряжений ограничения влияния dV/dt и тока перегрузки, а также при индуктивной нагрузке желательно использовать защитную RC-цепочку.
Расчет значений R и C зависит от многих параметров, которые с трудом поддаются точному описанию. Поэтому часто принимают во внимание эмпирические значения. Включение сопротивления 39-150 Ом и конденсатора 100 нФ дает удовлетворительные результаты. При этом значение сопротивления должно быть гораздо меньше (или одного порядка), чем величина полной нагрузки, являясь достаточно высоким для того, чтобы ограничить ток разряда конденсатора с целью соблюдения максимального значения di/dt в момент отпирания.
 Симистор с защитной RC-цепочкой
Симистор с защитной RC-цепочкойRC-цепочка улучшает открытие симистора, управляющего индуктивной нагрузкой. Ток разряда конденсатора устраняет влияние задержки индуктивного тока, поддерживая рабочий ток выше минимального тока удержания. Защитить симистор можно также подключив варистор параллельно его выводам А1 и А2.
Дополнительной защитой может служить варистор, подключенный к выводам индуктивной нагрузки. Варистор, включенный параллельно питающему напряжению, будет выступать в качестве фильтра помех в цепи питания.
Защита симистора с помощью варистораФазоимпульсное управление мощностью на нагрузке
Симисторные регуляторы состоят из двух основных частей. Самого симистора и узла управления. В качестве управляющего звена как правило применяются динисторы.
Динисторы – это полупроводниковые приборы симметричного типа, не обладающие полярностью. Динистор пропускает ток в двух направлениях и фактически является переключающим диодом. Он будет работать в обоих направлениях не зависимо от полярности питания на его выводах. Когда напряжение на контактах симметричного динистора превышает некоторое значение, называемое напряжением включения, происходит резкое уменьшение падения напряжения.Типичная вольт-амперная характеристика динистора
Он будет работать в обоих направлениях не зависимо от полярности питания на его выводах. Когда напряжение на контактах симметричного динистора превышает некоторое значение, называемое напряжением включения, происходит резкое уменьшение падения напряжения.Типичная вольт-амперная характеристика динистораПереход симметричного динистора в проводящее состояние происходит лавинообразно и подобен отпиранию симистора. Поведение динистора аналогично поведению симистора при напряжении переключения.
С помощью переменного резистора, включенного последовательно заряжаемому конденсатору, мы, по сути, меняем время заряда конденсатора. Чем больше сопротивление резистора, тем дольше заряжается конденсатор. Следовательно, динистор будет срабатывать реже и наоборот, т.е. меняется рабочая частота генератора. Этот резистор с конденсатором образуют времязадающую или частотозадающую цепочку. (Для примера смотрите схему в статье
китайский регулятор мощности)Динистор подает короткие импульсы на управляющий электрод симистора.
 Симистор срабатывает, сетевое питание идет в нагрузку через открытый симистор и переход остается открытым пока сетевое напряжение не сменит полярность.
Симистор срабатывает, сетевое питание идет в нагрузку через открытый симистор и переход остается открытым пока сетевое напряжение не сменит полярность.Если в ШИМ-регуляторах регулировка мощности осуществляется изменением длительности импульса, в фазоимпульсных регуляторах все иначе. Так как в сети ток синусоидальной формы, вращая переменный резистор мы частично отсекаем синус в нагрузке. Чем больше отсекается синус, тем меньше мощности поступает на нагрузку. Такие отсекания или обрезания синусоиды происходят по следующей причине.
Динистор подает короткий импульс, в момент подачи импульса симистор открывается и пропускает часть синусоиды. Динистор сразу закрывается так как на конденсаторе напряжение падает ниже 32 вольт, ранее он разрядился через динистор и открытый симистор. Но симистор по-прежнему открыт, он закроется только если убрать напряжение с рабочих электродов А1 и А2. При работе с переменным током синусоида проходит через нулевую точку (верхний полупериод закончился, а нижний еще не начался), напряжение равно нулю.
 И симистор закроется именно в этот момент.Фазоимпульсное управление мощностью на нагрузке
И симистор закроется именно в этот момент.Фазоимпульсное управление мощностью на нагрузкеТ.е. мощность, подаваемая на нагрузку, зависит от того в какой конкретно части синусоиды открылся симистор. Если он открывается вначале — мощность больше, если в конце – меньше. Весь процесс повторяется так же касательно нижней полуволны синусоиды. Вот и весь принцип фазоимпульсной регулировки.
Фазоимпульсное управление (импульсное) — Fagerhult (International)
Фазоимпульсное управление представляет собой упрощенный и экономичный вариант управления освещением с использованием управляемых ВЧ-ПРА, предназначенных для этой функции. Обычно этими балластами также можно управлять через шинную систему, такую как DSI, DALI или 1–10 В постоянного тока, в зависимости от марки и типа. Однако функции нельзя совмещать, так как это может привести к значительным повреждениям.
Фазоимпульсное управление не требует регулятора или другого контроллера, сигнал на ВЧ-ЭПРА поступает непосредственно от простого выключателя мгновенного действия.
К светильнику требуется только четырехжильный кабель: прямое (неотключаемое) сетевое напряжение, нейтраль и защитное заземление, а также сетевое напряжение (импульсное) через выключатель мгновенного действия.
Фазоимпульсное управление также является идеальной системой, когда вы хотите управлять системой освещения из нескольких мест в помещении. Надежность заключается в его простоте, а отсутствие промежуточных блоков делает установку простой и недорогой.
Переключатели управления могут состоять из переключателей на 250 В с нормально разомкнутыми контактами и импульсной пружиной или переключателей с возвратной пружиной. При использовании такого выключателя светильник включается и выключается быстрым нажатием и отпусканием выключателя, а регулировка уровня освещенности, чередующаяся вверх и вниз, производится нажатием и удержанием выключателя.
Примечание
- Выключатели управления не должны быть оснащены индикаторными лампами, так как утечка тока через них вызывает неисправности.

- Максимальная длина кабеля управления обычно не ограничена, поскольку сигнал представляет собой импульсный сигнал 230/240 В.
- Для управления и питания светильника должна использоваться одна и та же фаза. Это обеспечивает неполярное соединение, а это значит, что светильник может быть оснащен вилкой. Также возможно 3-фазное подключение, но для этого требуется специальное поляризованное подключение.
- Одновременное использование фазового управления (импульсное) и другого метода управления, такого как DALI или DSI, приведет к непоправимому повреждению цифрового оборудования управления.
- Избегайте смешивания различных марок в системе.
Импульсное управление фазой иногда может не совпадать по фазе. Часто это связано с тем, как используется импульсный переключатель. Некоторые пользователи нажимают на кнопку очень короткое время, и только часть ВЧ ЭПРА воспринимает это как сигнал к регулировке.
У каждой марки есть свой способ вернуть освещение в фазу. Обычно достаточно удерживать нажатым импульсный переключатель, тем самым переводя все светильники в режим «включено». Затем регулировка выполняется как обычно.
Обычно достаточно удерживать нажатым импульсный переключатель, тем самым переводя все светильники в режим «включено». Затем регулировка выполняется как обычно.
Это явление также может иметь место при наличии большого количества гармоник сети, которые мешают работе. В этом случае проще всего заменить кнопку на другой тип управления. Fagerhult рекомендует другой метод регулирования при управлении более чем четырьмя высокочастотными балластами из-за проблемы несовпадения фаз и из-за того, что гармоники могут препятствовать правильной работе. Вместо этого используйте балласты DALI HF и поворотный потенциометр Osram MCU (86212).
Демпфирование отсутствия – новая функция
Новые высокочастотные ЭПРА от Tridonic PCA ECO и Excel также можно использовать для диммирования между высоким уровнем (присутствие) и низким уровнем (отсутствие) с помощью датчиков присутствия. Идеальная функция для лестничных клеток, коридоров и водопропускных труб. Таким образом можно сэкономить большое количество энергии, не гася полностью свет.
Импульсное управление. Основы управления движением
Использование импульсных выходов ПЛК — экономичный способ получить простое движение. Большинство, если не все, производители ПЛК предоставляют способ управления сервоприводами и шаговыми двигателями с помощью сигнала последовательности импульсов. Поэтому, когда необходимо автоматизировать простую машину только по двум или трем осям с помощью электрических приводов, импульсные выходы гораздо проще настроить, подключить и запрограммировать, чем аналоговые сигналы. Это также может стоить меньше, чем использование сетевого движения, такого как Ethernet/IP.
Итак, давайте рассмотрим управление шаговым двигателем или сервоприводом с помощью драйвера или усилителя между контроллером и двигателем с упором на импульсные сигналы, используемые от контроллера или индексатора.
В этой статье рассказывается об управлении базовой системой управления движением, шаговым двигателем или сервоприводом с драйвером или усилителем между контроллером и двигателем с использованием импульсных сигналов.
Основы последовательности импульсов
Шаговые двигатели и версии серводвигателей с импульсным управлением могут вращаться в обоих направлениях. Это означает, что контроллер должен подавать на привод как минимум два управляющих сигнала. Есть два способа подачи этих сигналов, и разные производители называют их по-разному. Существует два распространенных способа обозначения двух используемых вами схем управляющих сигналов: «режим 1P», также известный как «режим шага/направления», и «режим 2P», который называется «режим CW/CCW» или по часовой стрелке/против часовой стрелки. режим. Оба режима требуют двух управляющих сигналов от контроллера к приводу.
В режиме 1P один управляющий сигнал представляет собой последовательность импульсов или «шаговый» сигнал. Другой сигнал является направленным входом. Если вход направления включен, а на шаговом входе присутствует импульсный сигнал, двигатель вращается по часовой стрелке. И наоборот, если сигнал направления выключен, а на входе шага присутствует импульсный сигнал, двигатель вращается в другом направлении или против часовой стрелки. Последовательность импульсов всегда находится на одном и том же входе, независимо от желаемого направления.
Последовательность импульсов всегда находится на одном и том же входе, независимо от желаемого направления.
Это примеры сигналов 1P для прямого и обратного движения.
В режиме 2P оба сигнала представляют собой серию импульсов. Только один вход в каждый момент времени будет иметь частоту, поэтому, если присутствует последовательность импульсов CW, двигатель вращается по часовой стрелке. Если присутствует последовательность импульсов против часовой стрелки, двигатель вращает против часовой стрелки. Какой вход получает последовательность импульсов, зависит от желаемого направления.
Это примеры сигналов 2P для прямого и обратного движения.
Импульсы, выдаваемые контроллером, приводят двигатель в движение. Двигатель вращает одну инкрементальную единицу для каждого импульса на импульсном входе привода. Например, если двухфазный шаговый двигатель имеет 200 импульсов на оборот (ppr), то один импульс заставляет двигатель вращаться на 1/200 оборота или 1,8 градуса, а 200 импульсов заставляют двигатель вращаться на один оборот.
Конечно, разные моторы имеют разное разрешение. Шаговые двигатели могут быть микрошаговыми, что дает им много тысяч импульсов на оборот. Кроме того, минимальная разрешающая способность серводвигателей обычно составляет несколько тысяч импульсов на оборот. Независимо от разрешения двигателя, импульс от контроллера или индексатора заставляет его вращаться только на одну единицу приращения.
Скорость вращения двигателя зависит от частоты импульсов или скорости. Чем быстрее импульсы, тем быстрее вращается двигатель. В приведенном выше примере с двигателем, который имеет 200 имп/об, частота 200 импульсов в секунду (pps) будет вращать двигатель со скоростью один оборот в секунду (об/с) или 60 оборотов в минуту (об/мин). Чем больше импульсов требуется для поворота двигателя на один оборот (имп/об), тем быстрее должны посылаться импульсы для достижения той же скорости. Например, двигатель с 1000 имп/об должен иметь частоту импульсов в несколько раз выше, чем у двигателя с 200 имп/об, чтобы работать на тех же оборотах. Математика довольно проста:
Математика довольно проста:
об/с = имп/с/имп/об (обороты в секунду = импульсы в секунду/импульсы на оборот)
об/мин = об/с (60)
Управление импульсами
Большинство контроллеров имеют метод определения, должен ли двигатель вращаться по часовой или против часовой стрелки. и будет управлять сигналами соответствующим образом. Другими словами, программисту обычно не требуется выяснять, какие выходы включить. Например, многие ПЛК имеют функции для управления движением с помощью импульсного сигнала, и эта функция автоматически регулирует выходы для получения правильного направления вращения независимо от того, настроен ли контроллер для режима 1P или 2P.
Рассмотрим два хода в качестве простого примера. Оба движения составляют 1000 импульсов. Один в положительном направлении, другой в отрицательном направлении. Контроллер включает соответствующие выходы, независимо от того, используются ли они 1P или 2P, чтобы заставить двигатель вращаться в положительном направлении (обычно по часовой стрелке), когда заданное количество импульсов равно 1000. С другой стороны, если программа выдает команду -1000 импульсов, контроллер включает соответствующие выходы для движения в отрицательном направлении (обычно против часовой стрелки). Поэтому программисту не обязательно управлять направлением вращения двигателя, используя код в программе для выбора используемых выходов. Контроллер делает это автоматически.
С другой стороны, если программа выдает команду -1000 импульсов, контроллер включает соответствующие выходы для движения в отрицательном направлении (обычно против часовой стрелки). Поэтому программисту не обязательно управлять направлением вращения двигателя, используя код в программе для выбора используемых выходов. Контроллер делает это автоматически.
Контроллеры и драйверы обычно позволяют пользователям выбирать тип импульса либо с помощью микропереключателя, либо с помощью программных настроек. Важно убедиться, что контроллер и драйвер настроены одинаково. В противном случае работа может быть нестабильной или вообще не работать.
Абсолютное и инкрементальное перемещение
Двумя наиболее распространенными командами перемещения в программировании управления перемещением являются команды инкрементного и абсолютного перемещения. Концепция абсолютных и инкрементальных перемещений сбивает с толку многих пользователей, независимо от используемого метода управления двигателем. Но эта информация применима независимо от того, управляется ли двигатель импульсами, аналоговым сигналом или сетью, такой как Ethernet/IP или Ethercat.
Но эта информация применима независимо от того, управляется ли двигатель импульсами, аналоговым сигналом или сетью, такой как Ethernet/IP или Ethercat.
Во-первых, если на двигателе есть энкодер, его типы движений не имеют ничего общего с типом энкодера. Во-вторых, абсолютные и инкрементальные перемещения могут выполняться независимо от того, имеется ли абсолютный или инкрементный энкодер или вообще нет энкодера.
При использовании двигателя для перемещения линейной оси, такого как шарико-винтовой привод, существует (очевидно) конечное расстояние между одним концом привода и другим. Другими словами, если каретка находится на одном конце привода, двигатель можно вращать для перемещения только до тех пор, пока каретка не достигнет противоположного конца. Это длина хода. Например, на приводе с ходом 200 мм один конец привода обычно находится в «нулевом» или исходном положении.
ПЛК или другой индексатор, выдающий сигналы серии импульсов на привод, управляемый последовательностью импульсов.
Абсолютное перемещение перемещает каретку в заданное положение независимо от ее текущего положения. Например, если текущая позиция равна нулю, а заданное перемещение составляет 100 мм, контроллер посылает достаточно импульсов, чтобы переместить привод вперед к отметке 100 мм и остановиться.
Слева моторный привод с кареткой в нулевом положении. Справа моторный привод с кареткой, перемещенной в положение 100 мм.
Но если бы текущее положение привода составляло 150 мм, абсолютное перемещение на 100 мм заставляло бы контроллер посылать импульсы в отрицательном направлении для перемещения привода назад на 50 мм и остановки в положении 100 мм.
Слева привод с электроприводом перемещает каретку в положение 150 мм. Справа привод с приводом от двигателя перемещает каретку в положение 100 мм.
Обратите внимание, что независимо от того, выбран режим 1P или 2P, команды перемещения работают одинаково.
Практическое использование
Наиболее распространенная проблема при использовании импульсного управления связана с проводкой.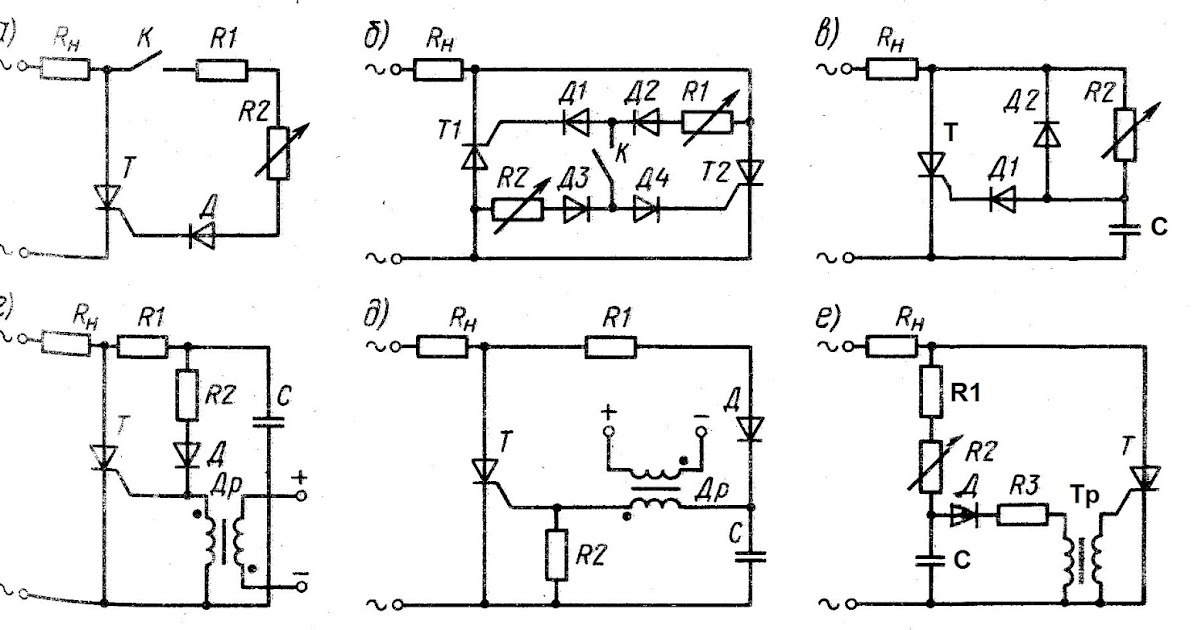 Сигналы часто случайно подключаются в обратном направлении. В режиме 2P это означает, что выход CCW подключен к входу CW и наоборот. В режиме 1P это означает, что выход импульсного сигнала подключен к входу направления, а выход сигнала направления подключен к импульсному входу.
Сигналы часто случайно подключаются в обратном направлении. В режиме 2P это означает, что выход CCW подключен к входу CW и наоборот. В режиме 1P это означает, что выход импульсного сигнала подключен к входу направления, а выход сигнала направления подключен к импульсному входу.
В режиме 2P из-за этой ошибки подключения двигатель вращается по часовой стрелке, когда подается команда двигаться против часовой стрелки, и против часовой стрелки, когда подается команда двигаться по часовой стрелке. В режиме 1P проблему диагностировать сложнее. Если сигналы меняются местами, контроллер посылает серию импульсов на вход направления, который ничего не делает. Он также будет посылать изменение направления (включение или выключение сигнала в зависимости от направления) на ступенчатый вход, что может вызвать импульс вращения двигателя. Один импульс движения обычно довольно трудно увидеть.
Использование режима 2P упрощает поиск и устранение неисправностей, и его обычно легче понять тем, кто не имеет большого опыта в этом типе управления движением.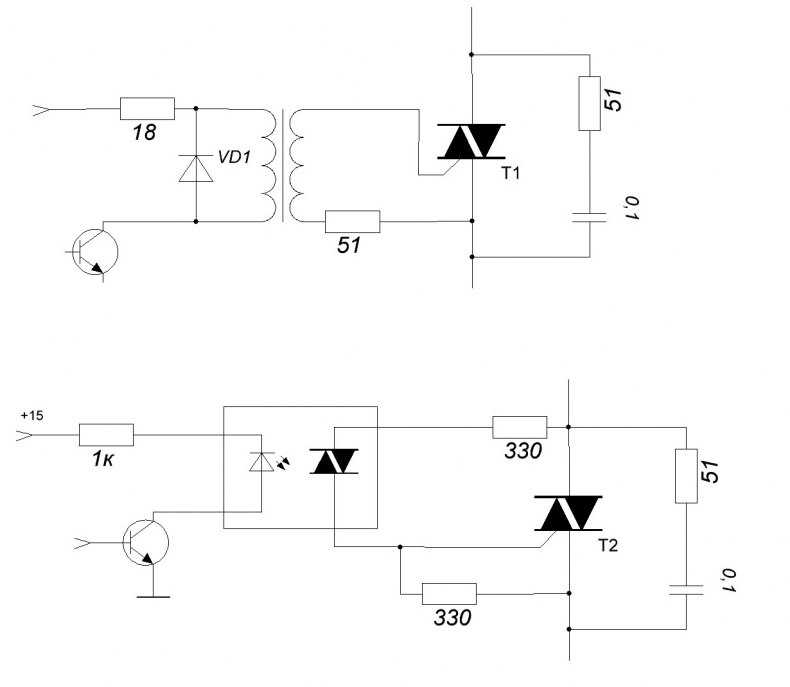
Вот метод, который позволяет как можно меньше времени тратить на поиск и устранение неисправностей импульсных осей и осей направления. Это позволяет инженерам сосредоточиться на чем-то одном. Это должно помешать вам тратить дни, пытаясь выяснить, какая ошибка проводки препятствует движению, только для того, чтобы обнаружить, что функция импульсного вывода неправильно настроена в ПЛК, и вы никогда не выводили импульсы.
1. Определите импульсный режим, который будет использоваться, и используйте один и тот же режим для всех осей.
2. Установите контроллер в соответствующий режим.
3. Установите привод в соответствующий режим.
4. Создайте простейшую программу в своем контроллере (обычно это функция толчкового режима), чтобы можно было дать команду двигателю вращаться в одном или другом направлении на малой скорости.
5. Отправьте команду на движение по часовой стрелке и следите за любыми состояниями контроллера, указывающими на то, что импульсы выводятся.
— Это могут быть светодиоды на выходах контроллера или флаги состояния, такие как флаг занятости в ПЛК. Счетчик импульсного выхода в контроллере также можно контролировать, чтобы увидеть, как он изменяет значение.
—Двигатель не нужно подключать к выходным импульсам.
6. Повторите проверку против часовой стрелки.
7. Если выдача импульсов в обоих направлениях прошла успешно, продолжайте. Если нет, то сначала нужно разобраться с программированием.
8. Подключите контроллер к драйверу.
9. Толчковый двигатель в одном направлении. Если работает, переходите к шагу 10. Если не работает, проверьте проводку.
10. Запустите двигатель в обратном направлении. Если это работает, вы преуспели. Если не работает, проверьте проводку.
Много часов было потрачено впустую на этой первой фазе, потому что частота импульсов достаточно низкая, чтобы заставить двигатель вращаться очень медленно, например, 1/100 об/с. Если единственный способ определить, работает ли он, — это наблюдать за валом двигателя, может показаться, что он не движется с низкой скоростью, что наводит на мысль, что он не выдает импульсы. Лучше всего рассчитать безопасную скорость на основе разрешения двигателя и параметров приложения, прежде чем скорость будет установлена для теста. Некоторые считают, что они могут установить полезную скорость, просто угадывая. Но если двигателю требуется 10 000 импульсов для одного оборота, а частота импульсов установлена на 1 000 импульсов в секунду, двигателю потребуется 10 секунд. сделать один оборот. И наоборот, если двигателю требуется 1000 импульсов для одного оборота, а частота импульсов установлена на 1000, двигатель будет совершать один оборот в секунду или 60 об/мин. Это может быть слишком быстро для теста, если двигатель прикреплен к нагрузке, такой как шарико-винтовой привод с ограниченным расстоянием перемещения. Очень важно следить за индикаторами, показывающими, что выводятся импульсы (светодиоды или счетчик импульсов).
Лучше всего рассчитать безопасную скорость на основе разрешения двигателя и параметров приложения, прежде чем скорость будет установлена для теста. Некоторые считают, что они могут установить полезную скорость, просто угадывая. Но если двигателю требуется 10 000 импульсов для одного оборота, а частота импульсов установлена на 1 000 импульсов в секунду, двигателю потребуется 10 секунд. сделать один оборот. И наоборот, если двигателю требуется 1000 импульсов для одного оборота, а частота импульсов установлена на 1000, двигатель будет совершать один оборот в секунду или 60 об/мин. Это может быть слишком быстро для теста, если двигатель прикреплен к нагрузке, такой как шарико-винтовой привод с ограниченным расстоянием перемещения. Очень важно следить за индикаторами, показывающими, что выводятся импульсы (светодиоды или счетчик импульсов).
Расчеты для практического применения
Пользователи часто сталкиваются с ЧМИ, показывающими расстояние и скорость машины в импульсах, а не в инженерных единицах, таких как миллиметры. Часто программист спешит заставить машину работать и не тратит время на определение машинных единиц и преобразование их в инженерные единицы. Вот несколько советов, которые помогут в этом.
Часто программист спешит заставить машину работать и не тратит время на определение машинных единиц и преобразование их в инженерные единицы. Вот несколько советов, которые помогут в этом.
Если известно разрешение шага двигателя (количество импульсов на оборот) и перемещение, совершаемое на оборот двигателя (мм), постоянная управляющего импульса рассчитывается как разрешение/расстояние на оборот или число импульсов на оборот/расстояние на оборот.
Константа может помочь определить, сколько импульсов необходимо для перемещения на определенное расстояние:
Текущее положение (или расстояние) = количество импульсов/командные импульсы постоянны.
Шарико-винтовая система с моторным приводом перемещается на 10 мм за один оборот.
Чтобы преобразовать инженерные единицы в импульсы, сначала определите константу, которая определяет количество импульсов, необходимых для данного перемещения. Предположим, что в приведенном выше примере двигателю требуется 500 импульсов для одного оборота, а один оборот равен 10 мм. Расчет константы можно выполнить, разделив 500 (ppr) на 10 (мм p/r). Таким образом, константа составляет 500 импульсов/10 мм или 50 импульсов/мм.
Расчет константы можно выполнить, разделив 500 (ppr) на 10 (мм p/r). Таким образом, константа составляет 500 импульсов/10 мм или 50 импульсов/мм.
Затем эту константу можно использовать для расчета количества импульсов, необходимого для перемещения на заданное расстояние. Например, чтобы переместиться на 15 мм, 15 мм × 50 частей на миллион = 750 импульсов.
Чтобы преобразовать показания счетчика импульсов в инженерные единицы, просто разделите значение счетчика импульсов на константу командного импульса. Таким образом, если счетчик импульсов показывает 6000, разделенных на постоянную командного импульса, рассчитанную из приведенного выше примера, положение привода будет 6000 импульсов/50 ppm = 120 мм.
Для задания скорости в мм и получения контроллером правильной частоты в Гц (количество импульсов в секунду) необходимо сначала определить постоянную скорости. Это делается путем нахождения постоянного командного импульса (как показано выше), но единицы измерения меняются. Другими словами, если двигатель выдает 500 импульсов на оборот, а привод перемещается на 10 мм за один оборот, то при задании 500 импульсов в секунду привод будет перемещаться со скоростью 10 мм в секунду. Разделив 500 импульсов в секунду на 10 мм в секунду, получим 50 импульсов в секунду на мм. Следовательно, умножение целевой скорости на 50 дает правильную частоту импульсов.
Другими словами, если двигатель выдает 500 импульсов на оборот, а привод перемещается на 10 мм за один оборот, то при задании 500 импульсов в секунду привод будет перемещаться со скоростью 10 мм в секунду. Разделив 500 импульсов в секунду на 10 мм в секунду, получим 50 импульсов в секунду на мм. Следовательно, умножение целевой скорости на 50 дает правильную частоту импульсов.
Формулы те же, но единицы измерения меняются:
Постоянная скорости в импульсах в секунду = количество импульсов на оборот/расстояние на оборот
Импульсная скорость (импульсы в секунду) = (постоянная скорости) × скорость в мм Последовательность импульсов для управления движением поначалу может показаться пугающей, однако внимательное отношение к типам сигналов и настройкам контроллера и приводов в начале может сократить время, затрачиваемое на его работу. Кроме того, если вы потратите время на выполнение некоторых основных расчетов сразу, программирование скоростей и расстояний будет проще, а операторы машин будут иметь более интуитивно понятную информацию, отображаемую на их HMI.