Что такое гироскоп и как он работает. Где используются гироскопы в современной технике. Кто изобрел гироскоп и как развивалась эта технология. Какие бывают виды гироскопов.
Что такое гироскоп и как он работает
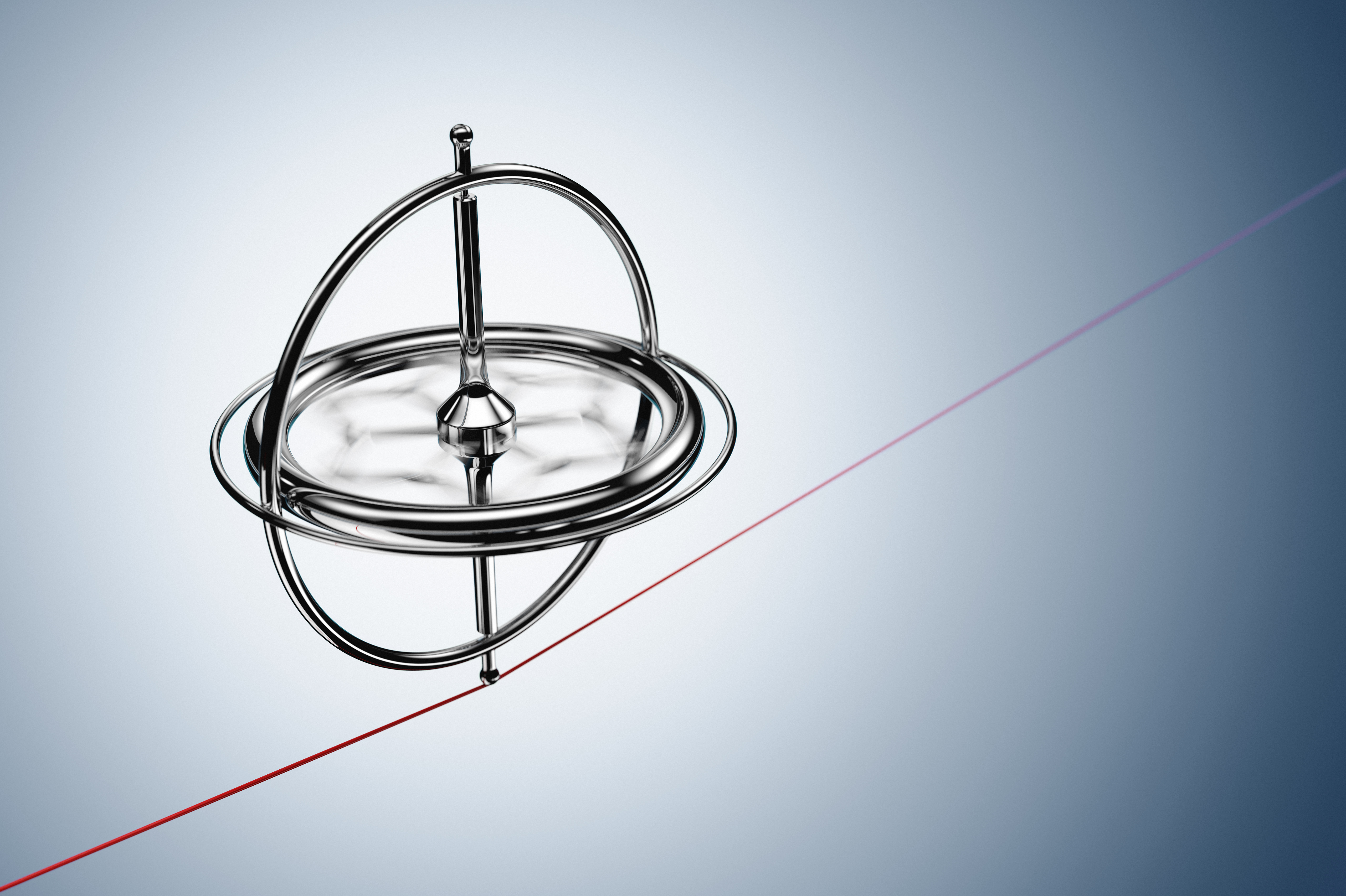
Гироскоп — это устройство, способное реагировать на изменение углов ориентации тела, на котором оно установлено, относительно инерциальной системы отсчета. Основной элемент гироскопа — быстро вращающийся ротор, закрепленный в специальном подвесе, обеспечивающем ему возможность свободного вращения.
Принцип работы гироскопа основан на законе сохранения момента импульса. Когда ротор гироскопа вращается с большой скоростью, его ось стремится сохранять неизменное направление в пространстве. При попытке изменить ориентацию оси возникает гироскопический момент, препятствующий этому изменению.
Основные свойства гироскопа:
- Устойчивость — способность сохранять неизменным направление оси вращения при отсутствии внешних воздействий
- Прецессия — поворот оси вращения под действием внешнего момента сил
- Нутация — колебательное движение оси вращения
Благодаря этим свойствам, гироскоп способен определять изменение углов ориентации объекта, на котором он установлен, относительно инерциальной системы отсчета. Это позволяет использовать его для измерения угловых скоростей, углов поворота и ориентации в пространстве.
Где применяются гироскопы в современной технике
Гироскопы нашли широкое применение во многих областях техники, где требуется определение ориентации и навигация. Основные сферы применения гироскопов:
Авиация и космонавтика
В авиации гироскопы используются в системах навигации и автопилотирования самолетов и вертолетов. Они позволяют определять положение летательного аппарата в пространстве. В космических аппаратах гироскопы применяются для ориентации и стабилизации.
Морской транспорт
На кораблях и подводных лодках гироскопы используются в гирокомпасах для определения курса, а также в системах стабилизации качки судна.
Ракетная техника
В ракетах гироскопы входят в состав систем управления и стабилизации полета. Они позволяют контролировать траекторию движения ракеты.
Мобильные устройства
Миниатюрные гироскопы используются в смартфонах, планшетах, игровых консолях для определения положения устройства в пространстве. Это позволяет реализовать функции навигации, управления жестами и др.
Робототехника
В роботах гироскопы применяются для определения положения корпуса и конечностей, что необходимо для управления движением и поддержания равновесия.
История создания и развития гироскопов
История гироскопа насчитывает более 200 лет. Основные этапы развития этой технологии:
Изобретение гироскопа
Первый гироскоп был создан в 1817 году немецким физиком Иоганном Боненбергером. Он представлял собой вращающийся массивный шар, закрепленный в кардановом подвесе. В 1852 году французский физик Леон Фуко усовершенствовал конструкцию и впервые использовал термин «гироскоп».
Первое практическое применение
В 1908 году немецкий изобретатель Герман Аншютц-Кэмпфе создал первый гирокомпас для использования на морских судах. Это стало первым широким практическим применением гироскопов.
Развитие авиационных гироскопов
В 1910-1920-х годах начинается активное применение гироскопов в авиации. Создаются гироскопические указатели поворота, курса, горизонта. В 1930-х годах появляются первые гиромагнитные компасы.

Создание инерциальных навигационных систем
В 1950-1960-х годах на основе гироскопов разрабатываются инерциальные навигационные системы для ракет, самолетов и подводных лодок. Это позволило осуществлять навигацию без использования внешних ориентиров.
Современный этап
С развитием микроэлектроники появились миниатюрные микромеханические (МЭМС) гироскопы. Они нашли применение в мобильных устройствах, робототехнике и других областях.
Основные виды современных гироскопов
В настоящее время существует несколько основных типов гироскопов:
Механические гироскопы
Классический тип гироскопа с вращающимся ротором. Отличаются высокой точностью, но имеют сложную конструкцию.
Оптические гироскопы
Работают на основе эффекта Саньяка. К ним относятся лазерные и волоконно-оптические гироскопы. Не имеют подвижных частей, что повышает надежность.
МЭМС-гироскопы
Миниатюрные гироскопы на основе микроэлектромеханических систем. Отличаются малыми размерами и низкой стоимостью. Широко применяются в мобильных устройствах.
Криогенные гироскопы
Сверхточные гироскопы, работающие при сверхнизких температурах. Используются в космических аппаратах и научных исследованиях.
Перспективы развития гироскопических технологий
Основные направления совершенствования гироскопов в настоящее время:
- Повышение точности и стабильности характеристик
- Уменьшение размеров и энергопотребления
- Снижение стоимости производства
- Разработка новых типов гироскопов на основе квантовых эффектов
- Интеграция гироскопов с другими датчиками в составе навигационных комплексов
Развитие гироскопических технологий открывает новые возможности в таких областях как беспилотный транспорт, виртуальная и дополненная реальность, медицина и др.
Интересные факты о гироскопах
Несколько любопытных фактов из истории и практики применения гироскопов:
- Самый большой в мире гироскоп весом 10 тонн был построен в СССР в 1950-х годах для испытания систем морской навигации
- Гироскопический эффект используется в игрушках, например, в волчках и йо-йо
- Гироскопы применяются для стабилизации видеокамер при съемке с движущихся объектов
- В некоторых высотных зданиях устанавливают гироскопические демпферы для гашения колебаний при сильном ветре или землетрясениях
- Точность современных оптических гироскопов позволяет измерять угловую скорость вращения Земли
Гироскопы, изобретенные более 200 лет назад, продолжают играть важную роль в современных технологиях, находя все новые применения по мере развития науки и техники.

Что такое гироскоп? Гироскоп в телефоне
Существует огромное количество изобретений, которые характеризуются длинной и весьма богатой историей использования в различных приборах и устройствах. Часто можно услышать название чего-либо, но даже не иметь представления о том, для чего оно предназначено. Именно так и возникает вопрос, что такое гироскоп? Стоит в нем разобраться.
Основное определение
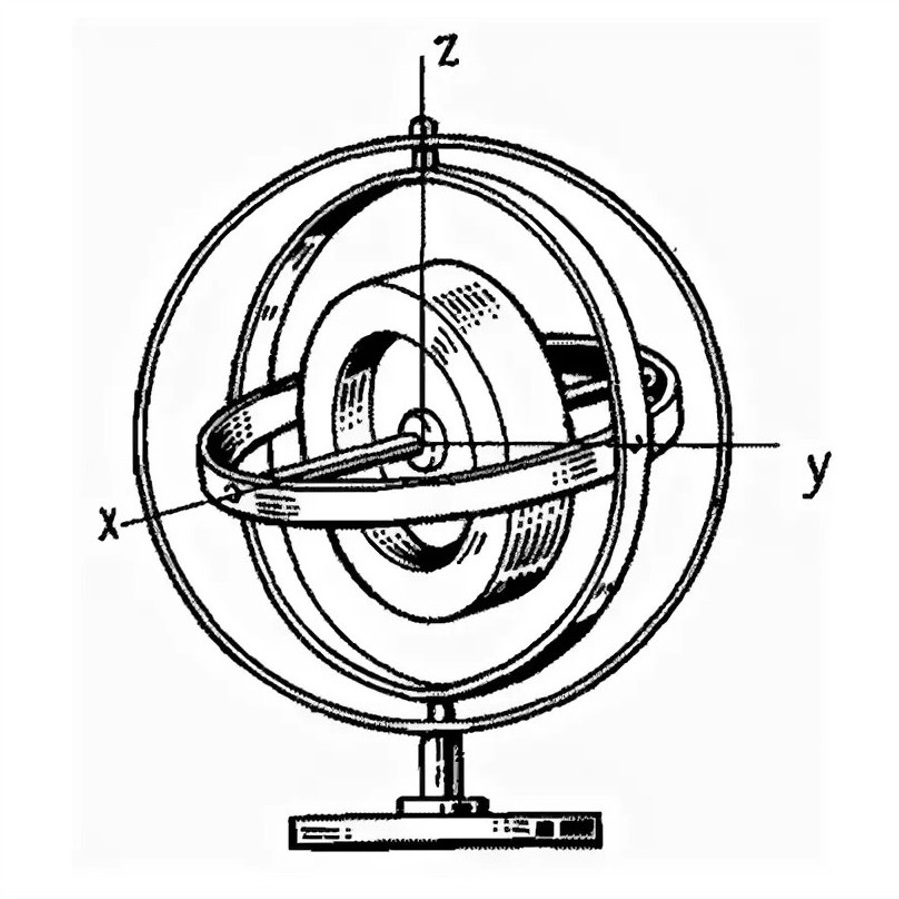
Гироскоп представляет собой навигационный прибор, в котором в качестве основного элемента используется быстро вращающийся ротор, закрепленный таким образом, чтобы его ось вращения поворачивалась. Две рамки карданова подвеса обеспечивают три степени свободы. При отсутствии каких-либо внешних воздействий на устройство ось собственного вращения ротора сохраняет в пространстве постоянное направление. Если на него оказывает воздействие момент внешней силы, которая стремится повернуть ось собственного вращения, то она начинает свое движение не вокруг направления момента, а вокруг оси, находящейся перпендикулярно по отношению к нему.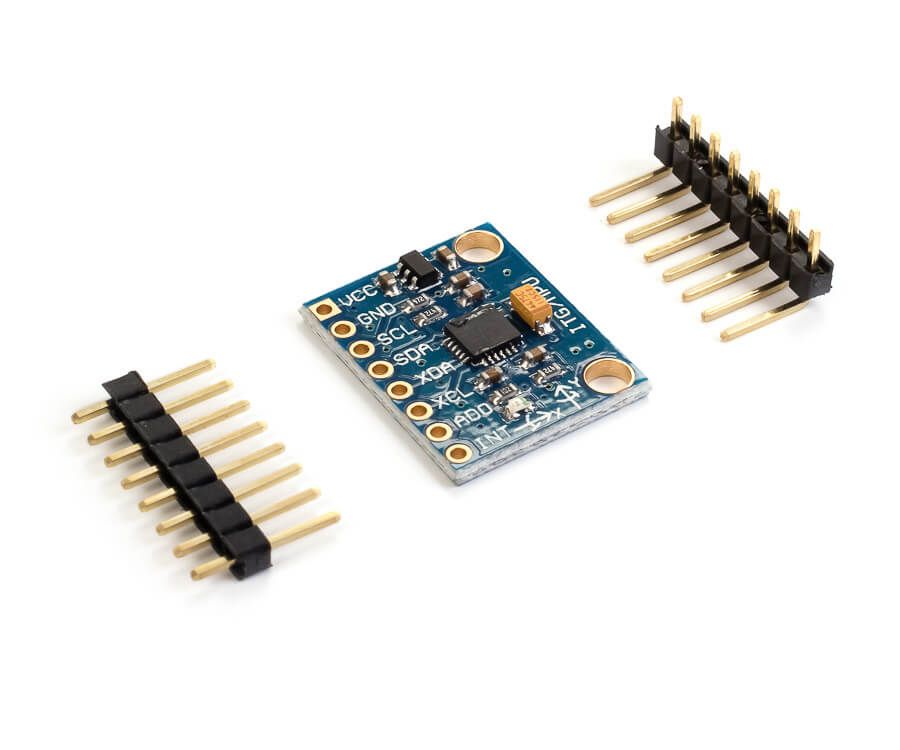
Особенности устройства
Если говорить о том, что такое гироскоп, то стоит отметить, что в качественно сбалансированном и достаточно быстро вращающемся приборе, установленном на высокосовершенных подшипниках, с малым трением практически отсутствует момент внешних сил, поэтому устройство способно сохранять свою ориентацию в пространстве почти неизменной. Поэтому он способен указывать угол поворота основания, на котором его закрепили. Именно так впервые было наглядно продемонстрировано вращение Земли французским физиком Ж. Фуко. Если ограничить поворот оси специальной пружиной, то при установке прибора на летательном аппарате, который выполняет разворот, гироскоп будет деформировать пружину до тех пор, пока момент внешней силы не уравновесится. В данном случае сила растяжения или сжатия пружины будет пропорциональна угловой скорости движения летательного аппарата. По такому принципу работает авиационный указатель поворота и многие другие гироскопические приборы. Так как в подшипниках создается очень малое трение, чтобы поддерживать вращение ротора гироскопа, не требуется больших затрат энергии. Обычн, для его приведения в движения, а также для поддержания этого движения достаточно электродвигателя малой мощности либо струи сжатого воздуха.
Обычн, для его приведения в движения, а также для поддержания этого движения достаточно электродвигателя малой мощности либо струи сжатого воздуха.
Гироскоп: применение
Чаще всего этот прибор используется в качестве чувствительного элемента для указывающих гироскопических приборов, а также в качестве датчика угла поворота или угловой скорости для устройств, работающих под автоматическим управлением. В некоторых случаях гироскоп может послужить в качестве генератора энергии или момента силы.
На текущий момент принцип работы гироскопа позволяет активно использовать его в авиации, судоходстве и космонавтике. Почти у каждого морского судна дальнего плавания имеется гирокомпас для автоматического или ручного управления судном, а в некоторых используются и гиростабилизаторы. Система управления огнем корабельной артиллерии обычно оснащается множеством дополнительных гироскопов, которые предназначены для обеспечения стабильной системы отсчета или для измерения угловых скоростей.
Если вам понятно, что такое гироскоп, то следует понимать, что без него просто немыслимо автоматическое управление торпедами. Вертолеты и самолеты тоже обязательно оборудуются этими приспособлениями для того, чтобы давать надежную информацию о деятельности систем навигации и стабилизации. К таким приборам можно отнести авиагоризонт, гироскопический указатель поворота и крена, гировертикаль. Если рассматривать вертолет с гироскопом, то тут этот прибор может служить как в качестве указывающего устройства, так и в качестве датчика автопилота. Многие самолеты оснащены гиростабилизированными магнитными компасами и прочим оборудованием – фотоаппаратами с гироскопами, гиросектантами, навигационными визирами. В военной авиации активно используются гироскопы в качестве составных элементов в прицелах бомбометания и воздушной стрельбы.
Применение в современных гаджетах
Итак, если рассматривать, что такое гироскоп, то следует заметить, что этот прибор активно используется не только в указанных ранее сферах. Современные смартфоны и планшеты оснащены массой дополнительных функций и модулей, при этом некоторые оказываются очень даже полезными, а иные могут мешать комфортному использованию устройства, раздражая пользователей. Одним из них является гироскоп в телефоне, что это становится понятно, когда вы будете пользоваться своим аппаратом. С одной стороны, он оказывается очень даже полезным, хотя с другой – большинство пользователей предпочитают просто отключать его.
Современные смартфоны и планшеты оснащены массой дополнительных функций и модулей, при этом некоторые оказываются очень даже полезными, а иные могут мешать комфортному использованию устройства, раздражая пользователей. Одним из них является гироскоп в телефоне, что это становится понятно, когда вы будете пользоваться своим аппаратом. С одной стороны, он оказывается очень даже полезным, хотя с другой – большинство пользователей предпочитают просто отключать его.
Сначала необходимо определиться с тем, что это за устройство и каким функционалом оно характеризуется. Итак, гироскоп в телефоне — что это? Этот элемент необходим для определения того, как ориентирован прибор в пространстве. В некоторых случаях этот датчик можно применить для защиты отдельных элементов устройства от падения в будущем. Фактически данный датчик предназначен для определения смены положения, а при наличии акселерометра — и ускорения при падении. Затем информация передается вычислительному блоку гаджета. При наличии определенного программного обеспечения прибор принимает решение о том, как ему следует реагировать далее на изменения, произошедшие с ним.
Для чего еще он нужен?
Итак, если с вопросом, что такое гироскоп, становится все понятно, то остается выяснить, зачем его используют в телефонах. Защита внутренностей тут не является единственной задачей. В сочетании с разнообразным софтом на него ложится целый ряд различных функций. К примеру, смартфон может использоваться для игр, в которых управление осуществляется посредством наклонов, встряхивания или поворотов прибора. Подобное управление позволяет сделать игры поистине увлекательными, благодаря чему они пользуются повышенным спросом.
Интересные особенности
Можно отметить, что продукция компании «Эппл» оснащается гироскопами, и они играют весьма значимую роль, так как к ним привязана работа многих приложений. Под него специально разработали режим, получивший название CoverFlow. Существует очень большое количество приложений, работающих в данном режиме, однако можно остановиться на нескольких, наиболее наглядно демонстрирующих его. К примеру, если на iPhone использовать калькулятор, то в портретном положении пользователю будут доступны только простые действия, а именно: сложение, вычитание, деление и умножение. Но при повороте устройства на 90 градусов все изменится. Калькулятор при этом переключается в расширенный режим, то есть инженерный, в котором функций будет доступно гораздо больше.
Но при повороте устройства на 90 градусов все изменится. Калькулятор при этом переключается в расширенный режим, то есть инженерный, в котором функций будет доступно гораздо больше.
Если вам понятно, как работает гироскоп, то следует отметить, что его функции могут использоваться и для определения собственного местоположения на местности.
Можно просматривать на таком приборе карту местности с применением GPS-навигации, и в этом случае карта всегда будет поворачиваться в ту сторону, куда направлен ваш взгляд. Поэтому, если вы стоите лицом, к примеру, к речке, то это отобразится на карте, а если повернетесь, то изменится и положение карты. Благодаря этому ориентирование на местности значительно упрощается и может стать достаточно полезно людям, увлеченным активным отдыхом.
Проблемы с гироскопом в телефоне
Можно сказать и о недостатках, присущих гироскопам. Очень часто их отключают из-за того, что программы реагируют на изменение положения в пространстве с некоторым запозданием. К примеру, если вы решили почитать, лежа на диване, с экрана смартфона или планшета, то гироскоп и программа, связанная с ним, будут менять ориентацию страницы каждый раз, когда вы будете поворачиваться или смените позу. Это причиняет много неудобств, так как очень редко устройство способно правильно интерпретировать положение в пространстве, а ситуация усугубляется из-за запоздалой реакции программы.
К примеру, если вы решили почитать, лежа на диване, с экрана смартфона или планшета, то гироскоп и программа, связанная с ним, будут менять ориентацию страницы каждый раз, когда вы будете поворачиваться или смените позу. Это причиняет много неудобств, так как очень редко устройство способно правильно интерпретировать положение в пространстве, а ситуация усугубляется из-за запоздалой реакции программы.
Современные разновидности
Первые гироскопы были механическими. Этот вид устройств используется и сейчас, но с некоторыми усовершенствованиями, позволяющими сделать их более полезными. На данный момент существует лазерный гироскоп, который лишен недостатков, свойственным механическим. И именно такой прибор используется в современной технике.
История создания гироскопа и гироскопических приборов
В Пермском музее науки и техники ОАО «ПНППК» в рамках цикла еженедельных просветительских встреч состоялась беседа с доцентом ПГНИУ Нико
В Пермском музее науки и техники ОАО «ПНППК» в
рамках цикла еженедельных просветительских встреч состоялась
беседа с доцентом ПГНИУ Николаевым Юрием Константиновичем об
истории создания гироскопа и гироскопических приборов.
|
СПРАВКА Автор и ведущий: Николаев Юрий Константинович, доцент ПГНИУ, действительный член Международной туристской академии, член геральдической комиссии при губернаторе Пермского края, член союза журналистов России, председатель Пермского отделения Всероссийского геральдического общества, член союза геральдистов России. |
До изобретения гироскопа человечество использовало различные
методы определения направления в пространстве. Издревле люди
ориентировались визуально по удалённым предметам, в частности, по
Солнцу. Уже в древности появились первые приборы: отвес и
уровень, основанные на гравитации.

 Секрет заключался в том, что чернильница находилась в центре
хитроумно установленных концентрических металлических колец,
поэтому она сохраняла устойчивость независимо от положения. После
античности карданов подвес был широко известен в мусульманском
мире. В IX веке, через 1100 лет после изобретения, устройство
стало снова известно в Европе благодаря арабам. А еще через 800
лет известный учёный Роберт Гук и другие изобретатели стали
использовать этот принцип не для стабилизации центрального
элемента, а для приложения внешних сил. Этому западному
изобретению дали название универсального шарнира Гука. Именно оно
легло в основу механизма силовой передачи современных
автомобилей.
Секрет заключался в том, что чернильница находилась в центре
хитроумно установленных концентрических металлических колец,
поэтому она сохраняла устойчивость независимо от положения. После
античности карданов подвес был широко известен в мусульманском
мире. В IX веке, через 1100 лет после изобретения, устройство
стало снова известно в Европе благодаря арабам. А еще через 800
лет известный учёный Роберт Гук и другие изобретатели стали
использовать этот принцип не для стабилизации центрального
элемента, а для приложения внешних сил. Этому западному
изобретению дали название универсального шарнира Гука. Именно оно
легло в основу механизма силовой передачи современных
автомобилей.
Компас нового времени, использующий карданов подвес
(1570 г. ) )
|
Самое раннее упоминание этого устройства в китайской литературе
относится к 140 г. до н.э. Предполагаемым изобретателем
устройства считается Фан Фэн. Подвес Фан Фэна применялся в
масляных лампах, в которых лампадка крепилась на кольцах,
скрепленных в двух противоположных точках, что позволяло
сохранять ей вертикальное положение. Принцип данного устройства
был вскоре забыт. В сочинении «Всесторонние записки западной
столицы», изданном в 189 г., сообщается что создателем
«курительницы для постели» с применением особого подвеса был Дин
Хуань. После этого карданов подвес часто применялся в разных
устройствах. Начиная с эпохи Сун, с помощью карданова подвеса
крепилось сиденье императора на паланкине, что позволяло сидеть
ему вертикально, даже если носильщики наклоняли паланкин.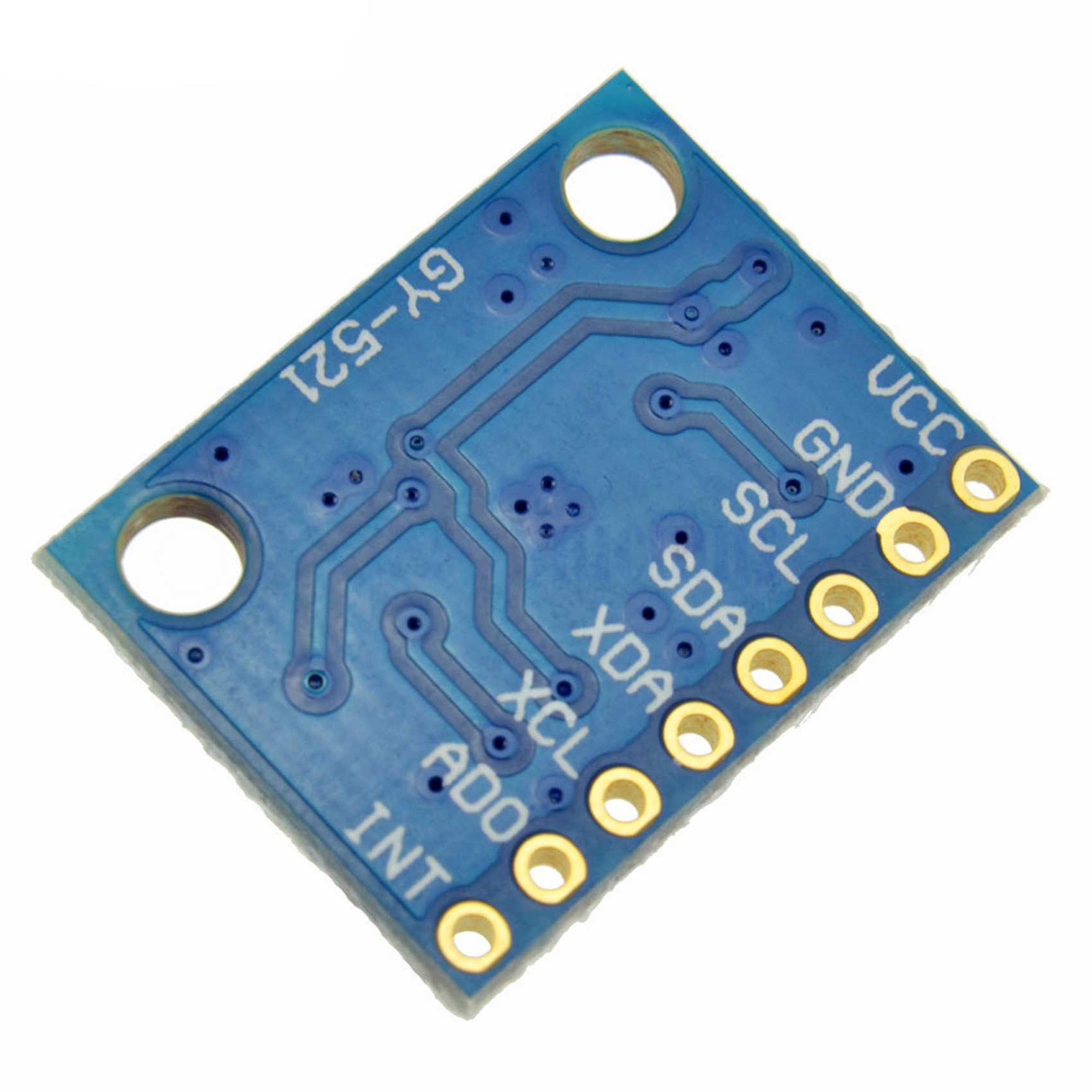 В 1852
году французский учёный Фуко усовершенствовал гироскоп и впервые
использовал его как прибор, показывающий изменение направления,
через год после изобретения маятника Фуко, тоже основанного на
сохранении вращательного момента. Именно Фуко придумал название
«гироскоп». Фуко, как и Боненбергер, использовал карданов подвес.
Преимуществом гироскопа перед более древними приборами является
то, что он правильно работает в сложных условиях (плохая
видимость, тряска, электромагнитные помехи). Однако гироскоп
быстро останавливался из-за трения. Во второй половине XIX века
Труве предложил использовать электродвигатель для разгона и
поддержания движения гироскопа. Впервые на практике гироскоп был
применён в 1896 году австрийским инженером Л.Обри для
стабилизации курса торпеды. Следующее применение гироскопа в
технике также относится к морскому делу.
В 1852
году французский учёный Фуко усовершенствовал гироскоп и впервые
использовал его как прибор, показывающий изменение направления,
через год после изобретения маятника Фуко, тоже основанного на
сохранении вращательного момента. Именно Фуко придумал название
«гироскоп». Фуко, как и Боненбергер, использовал карданов подвес.
Преимуществом гироскопа перед более древними приборами является
то, что он правильно работает в сложных условиях (плохая
видимость, тряска, электромагнитные помехи). Однако гироскоп
быстро останавливался из-за трения. Во второй половине XIX века
Труве предложил использовать электродвигатель для разгона и
поддержания движения гироскопа. Впервые на практике гироскоп был
применён в 1896 году австрийским инженером Л.Обри для
стабилизации курса торпеды. Следующее применение гироскопа в
технике также относится к морскому делу. Гироскоп использовали
при разработке морского указателя курса – гирокомпаса. Прототип
современного гирокомпаса первым создал Герман Аншютц-Кэмпфе
(запатентован в 1908), вскоре подобный прибор построил
американский инженер Э. Сперри (запатентован в 1911). История
изобретения гирокомпаса такова: немецкий инженер Герман
Аншютц-Кэмпфе предложил проект экспедиции подводной лодки на
северный полюс Земли. Для ориентации подводной лодки был
необходим прибор для указания курса. Магнитный компас
использовать было нельзя, так как в высоких широтах он не
работает из-за больших возмущений магнитного поля Земли. К тому
времени были известны работы французского инженера Артура Кребса
(1889г.), который при проведении экспериментов на подводной лодке
предложил смещать центр тяжести гироскопа с горизонтальным
расположением оси вращения по вертикали , что фактически означало
изобретение морского маятникового гирокомпаса.
Гироскоп использовали
при разработке морского указателя курса – гирокомпаса. Прототип
современного гирокомпаса первым создал Герман Аншютц-Кэмпфе
(запатентован в 1908), вскоре подобный прибор построил
американский инженер Э. Сперри (запатентован в 1911). История
изобретения гирокомпаса такова: немецкий инженер Герман
Аншютц-Кэмпфе предложил проект экспедиции подводной лодки на
северный полюс Земли. Для ориентации подводной лодки был
необходим прибор для указания курса. Магнитный компас
использовать было нельзя, так как в высоких широтах он не
работает из-за больших возмущений магнитного поля Земли. К тому
времени были известны работы французского инженера Артура Кребса
(1889г.), который при проведении экспериментов на подводной лодке
предложил смещать центр тяжести гироскопа с горизонтальным
расположением оси вращения по вертикали , что фактически означало
изобретение морского маятникового гирокомпаса. Экспедиция к северному полюсу Земли не состоялась, но Г.
Аншютц-Кемпфе была предложена очень удачная конструктивная схема
морского гирокомпаса. В последующие годы
разрабатывалось множество гирокомпасов различных модификаций, но
наиболее удачные из них принципиально почти не отличались от
устройств Аншютца и Сперри. Э. Сперри пытался оспорить у
Г.Аншютца-Кемпфе приоритет изобретения гирокомпаса в суде, но
дело проиграл. Главным экспертом в этом судебном деле был Альберт
Эйнштейн, который встал на сторону Г.Аншютца-Кемпфе. Морские
гирокомпасы современной конструкции значительно усовершенствованы
по сравнению с первыми моделями; они отличаются высокой точностью
и надежностью и удобнее в эксплуатации.
В XX веке гироскопы
стали использоваться в самолётах, ракетах и подводных лодках.
Русская авиация не только не отставала от зарубежных стран в деле
использования гироскопических приборов на самолете, но часто
являлась пионером их внедрения.
Экспедиция к северному полюсу Земли не состоялась, но Г.
Аншютц-Кемпфе была предложена очень удачная конструктивная схема
морского гирокомпаса. В последующие годы
разрабатывалось множество гирокомпасов различных модификаций, но
наиболее удачные из них принципиально почти не отличались от
устройств Аншютца и Сперри. Э. Сперри пытался оспорить у
Г.Аншютца-Кемпфе приоритет изобретения гирокомпаса в суде, но
дело проиграл. Главным экспертом в этом судебном деле был Альберт
Эйнштейн, который встал на сторону Г.Аншютца-Кемпфе. Морские
гирокомпасы современной конструкции значительно усовершенствованы
по сравнению с первыми моделями; они отличаются высокой точностью
и надежностью и удобнее в эксплуатации.
В XX веке гироскопы
стали использоваться в самолётах, ракетах и подводных лодках.
Русская авиация не только не отставала от зарубежных стран в деле
использования гироскопических приборов на самолете, но часто
являлась пионером их внедрения. Так, например, в 1917 г. русские
летчики А.Н. Журавченко и Г.Н. Алехнович совершили на самолете
«Илья Муромец» слепой полет, выдерживая прямолинейный курс в
заданном направлении по гироскопическому указателю поворотов.
Этот прибор, разработанный П.П. Шиловским специально для авиации,
позволил провести самолет по заранее намеченному курсу при полном
отсутствии видимости земных ориентиров. Работы советских ученых
А.Н. Крылова, Б.В. Булгакова, С.С. Тихменева, Г.В. Коренева, А.Р.
Бонина, Г.О. Фридлен-дера и многих других в содружестве с
выдающимися конструкторами Е.Ф. Антиповым, Е.В. Ольманом, Р.Г.
Чичикяном, А.И. Марковым и другими талантливыми инженерами
обеспечили оснащение советской авиации высококачественными
гироскопическими приборами. В двадцатых годах XX столетия в
дополнение к указателю поворотов создаются авиационные
гироскопические указатели, курса и горизонта, которые стали в
настоящее время обязательными навигационными приборами самолета
любого типа.
Так, например, в 1917 г. русские
летчики А.Н. Журавченко и Г.Н. Алехнович совершили на самолете
«Илья Муромец» слепой полет, выдерживая прямолинейный курс в
заданном направлении по гироскопическому указателю поворотов.
Этот прибор, разработанный П.П. Шиловским специально для авиации,
позволил провести самолет по заранее намеченному курсу при полном
отсутствии видимости земных ориентиров. Работы советских ученых
А.Н. Крылова, Б.В. Булгакова, С.С. Тихменева, Г.В. Коренева, А.Р.
Бонина, Г.О. Фридлен-дера и многих других в содружестве с
выдающимися конструкторами Е.Ф. Антиповым, Е.В. Ольманом, Р.Г.
Чичикяном, А.И. Марковым и другими талантливыми инженерами
обеспечили оснащение советской авиации высококачественными
гироскопическими приборами. В двадцатых годах XX столетия в
дополнение к указателю поворотов создаются авиационные
гироскопические указатели, курса и горизонта, которые стали в
настоящее время обязательными навигационными приборами самолета
любого типа. В начале тридцатых годов советские конструкторы Д.А.
Браславский, М.М. Качкачян и М.Г. Эйлькинд первыми в мире
разработали, построили и испытали гиромагнитный компас,
получивший в настоящее время широкое распространение в авиации
всех стран мира. Идею определения местоположения объекта с
помощью двукратного интегрирования по времени проекций вектора
ускорения, измеряемого на борту, запатентовал Рейнгард Вуссов в
1905 году. Для этого он предложил поместить на объекте
акселерометр, ось чувствительности которого стабилизировалась с
помощью свободного гироскопа. Указанная заявка в своей основе
содержала идею метода навигации, в дальнейшем названного
инерциальным. Суть этого метода состоит в определении координат
объекта посредством расположенных на нем гироскопов, маятников
(акселерометров) и часов без использования во время движения
сторонней информации.
В начале тридцатых годов советские конструкторы Д.А.
Браславский, М.М. Качкачян и М.Г. Эйлькинд первыми в мире
разработали, построили и испытали гиромагнитный компас,
получивший в настоящее время широкое распространение в авиации
всех стран мира. Идею определения местоположения объекта с
помощью двукратного интегрирования по времени проекций вектора
ускорения, измеряемого на борту, запатентовал Рейнгард Вуссов в
1905 году. Для этого он предложил поместить на объекте
акселерометр, ось чувствительности которого стабилизировалась с
помощью свободного гироскопа. Указанная заявка в своей основе
содержала идею метода навигации, в дальнейшем названного
инерциальным. Суть этого метода состоит в определении координат
объекта посредством расположенных на нем гироскопов, маятников
(акселерометров) и часов без использования во время движения
сторонней информации. Кроме того, практически одновременно
с Вуссовым были запатентованы идеи американского и русского
изобретателей М. Керри (1903 г.) и В.В. Алексеева (1911 г.)
инерциальных систем геометрического типа, которые должны
обеспечивать определение координат объекта, движущегося на
поверхности вращающегося земного шара. В 30е годы XX века
были сформулированы основные принципы инерциальной навигации.
Историю инерциальной навигации в нашей стране принято начинать с
момента разработки в 1932 году авиационной приборной вертикали с
интегральной коррекцией, невозмущаемой горизонтальными силами
инерции. В дальнейшем идею этой разработки стали называть схемой
Л.М. Кофмана и Е.Б. Левенталя. В соответствии с этой схемой
гироплатформа с жестко связанными с нею двумя
ньютонометрами (акселерометрами) управлялась сигналами,
пропорциональными интегралам от показаний ньютонометров, причем
коэффициент пропорциональности выбирался так, чтобы выполнялись
условия невозмущаемости.
Кроме того, практически одновременно
с Вуссовым были запатентованы идеи американского и русского
изобретателей М. Керри (1903 г.) и В.В. Алексеева (1911 г.)
инерциальных систем геометрического типа, которые должны
обеспечивать определение координат объекта, движущегося на
поверхности вращающегося земного шара. В 30е годы XX века
были сформулированы основные принципы инерциальной навигации.
Историю инерциальной навигации в нашей стране принято начинать с
момента разработки в 1932 году авиационной приборной вертикали с
интегральной коррекцией, невозмущаемой горизонтальными силами
инерции. В дальнейшем идею этой разработки стали называть схемой
Л.М. Кофмана и Е.Б. Левенталя. В соответствии с этой схемой
гироплатформа с жестко связанными с нею двумя
ньютонометрами (акселерометрами) управлялась сигналами,
пропорциональными интегралам от показаний ньютонометров, причем
коэффициент пропорциональности выбирался так, чтобы выполнялись
условия невозмущаемости. Как легко показать, такое устройство
является моделью маятника Шулера. Оно послужило прообразом
инерциальных навигационных систем с горизонтируемой платформой.
Следует заметить, что схема, близкая к схеме Кофмана-Левенталя,
была предложена в Германии в 1934 году Иоганном Бойковым.
В годы второй мировой войны в Германии
были созданы первые гироскопические ракетные приборы. Система
гироскопических приборов ракеты Фау-2, состоящая из
гирогоризонта, гировертиканта и гироскопического датчика
регулирования скорости полета, стала классической системой
гироприборов в ракетной технике, не потерявшей своей актуальности
и в настоящее время.
Как легко показать, такое устройство
является моделью маятника Шулера. Оно послужило прообразом
инерциальных навигационных систем с горизонтируемой платформой.
Следует заметить, что схема, близкая к схеме Кофмана-Левенталя,
была предложена в Германии в 1934 году Иоганном Бойковым.
В годы второй мировой войны в Германии
были созданы первые гироскопические ракетные приборы. Система
гироскопических приборов ракеты Фау-2, состоящая из
гирогоризонта, гировертиканта и гироскопического датчика
регулирования скорости полета, стала классической системой
гироприборов в ракетной технике, не потерявшей своей актуальности
и в настоящее время.
Литература.
1. Johann G. F. Bohnenberger (1817) «Beschreibung einer Maschine
zur Erläuterung der Gesetze der Umdrehung der Erde um ihre Axe,
und der Veränderung der Lage der letzteren» («Описание машины для
объяснения законов вращения Земли вокруг своей оси и изменения
направления последней») Tübinger Blätter für Naturwissenschaften
und Arzneikunde, vol.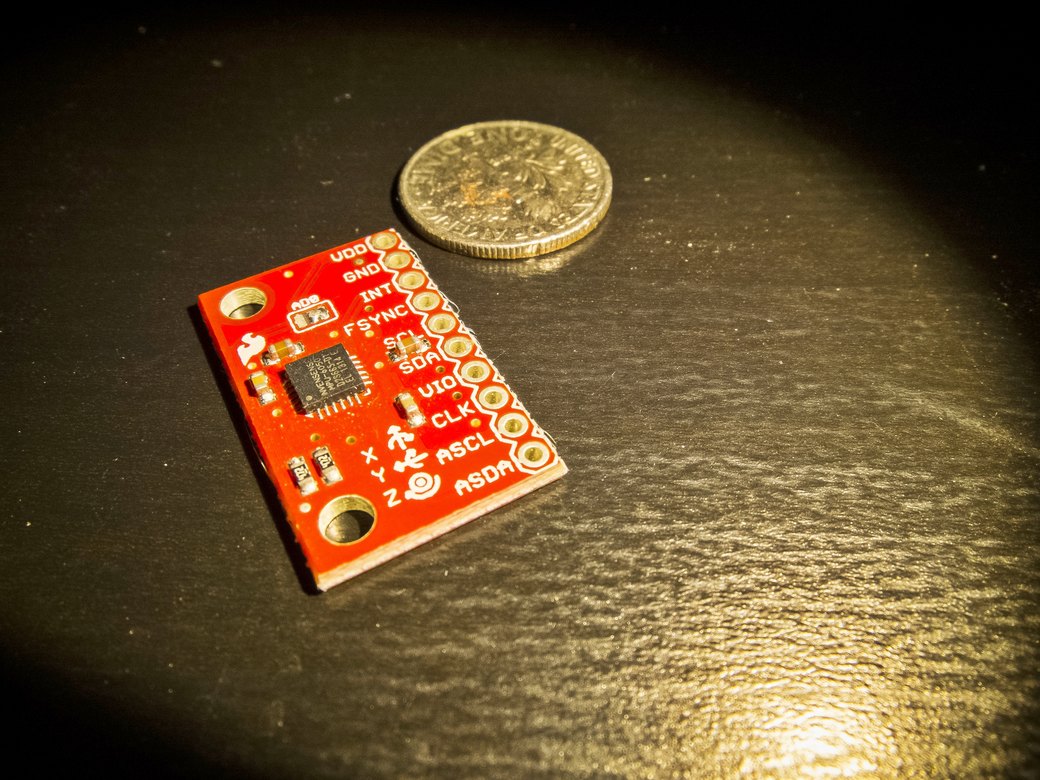 3, pages 72-83. В интернете:
http://www.ion.org/museum/files/File_1.pdf
3, pages 72-83. В интернете:
http://www.ion.org/museum/files/File_1.pdf
2. Simeon-Denis Poisson (1813) «Mémoire sur un cas particulier du mouvement de rotation des corps pesans» («Статья об особом случае вращательного движения массивных тел»), Journal de l’École Polytechnique, vol. 9, pages 247—262. В интернете: http://www.ion.org/museum/files/File_2.pdf
3.Фото гироскопа Боненбергера: http://www.ion.org/museum/item_view.cfm?cid=5&scid=12&iid=24
4.Walter R. Johnson (January 1832) «Description of an apparatus called the rotascope for exhibiting several phenomena and illustrating certain laws of rotary motion, » The American Journal of Science and Art, 1st series, vol. 21, no. 2, pages 265—280. В интернете: http://books.google.com/books?id=BjwPAAAAYAAJ&pg=PA265&lpg=PR5&dq=Johnson+rotascope&ie=ISO-8859-1&output=html
5.QE9s3HCn3DBS!GRS,UHg~~60_57.JPG?set_id=880000500F) Illustrations of Walter R. Johnson’s gyroscope («rotascope»)
appear in: Board of Regents, Tenth Annual Report of the Board of
Regents of the Smithsonian Institution…. (Washington, D.C.:
Cornelius Wendell, 1856), pages 177—178. В интернете:
http://books.google.com/books?id=fEyT4sTd7ZkC&pg=PA178&dq=Johnson+rotascope&ie=ISO-8859-1&output=html
Illustrations of Walter R. Johnson’s gyroscope («rotascope»)
appear in: Board of Regents, Tenth Annual Report of the Board of
Regents of the Smithsonian Institution…. (Washington, D.C.:
Cornelius Wendell, 1856), pages 177—178. В интернете:
http://books.google.com/books?id=fEyT4sTd7ZkC&pg=PA178&dq=Johnson+rotascope&ie=ISO-8859-1&output=html
6. Wagner JF, «The Machine of Bohnenberger, » The Institute of Navigation. В интернете: http://www.ion.org/museum/item_view.cfm?cid=5&scid=12&iid=24
7. L. Foucault (1852) «Sur les phénomènes d’orientation des corps tournants entraînés par un axe fixe à la surface de la terre, « Comptes rendus hebdomadaires des séances de l’Académie des Sciences (Paris), vol. 35, pages 424—427. В интернете: http://www.bookmine.org/memoirs/pendule.html . Scroll down to «Sur les phénomènes d’orientation …»
8. (1) Julius Plücker (September 1853) «Über die Fessel’sche
rotationsmachine, » Annalen der Physik, vol. 166, no. 9, pages
174—177; (2) Julius Plücker (October 1853) «Noch ein wort über
die Fessel’sche rotationsmachine, » Annalen der Physik, vol. 166,
no. 10, pages 348—351; (3) Charles Wheatstone (1864) «On Fessel’s
gyroscope, » Proceedings of the Royal Society of London, vol. 7,
pages 43-48.
(1) Julius Plücker (September 1853) «Über die Fessel’sche
rotationsmachine, » Annalen der Physik, vol. 166, no. 9, pages
174—177; (2) Julius Plücker (October 1853) «Noch ein wort über
die Fessel’sche rotationsmachine, » Annalen der Physik, vol. 166,
no. 10, pages 348—351; (3) Charles Wheatstone (1864) «On Fessel’s
gyroscope, » Proceedings of the Royal Society of London, vol. 7,
pages 43-48.
Как работает гироскоп и что общего у йо-йо и самолета — T&P
Если волчок раскрутить, то он не упадет, пока не остановится. Это происходит благодаря закону сохранения момента импульса. Не очень-то понятное объяснение.
Когда пытаешься повернуть крутящееся тело, возникает сила, которая действует перпендикулярно силе, которую прикладываешь к нему. На втором рисунке видно, что, когда части колеса, обозначенные точками A и B, поворачиваются на 90 градусов, они стремятся повернуть колесо в плоскости экрана по часовой стрелке. Это называется прецессия. Из-за этой силы ось волчка всегда ходит по кругу, если запустить его не ровно, very non-intuitive.
Это называется прецессия. Из-за этой силы ось волчка всегда ходит по кругу, если запустить его не ровно, very non-intuitive.
Помечтаем о лете, представим себе, что мы едем на велике. Переднее колесо нам хорошо видно, почти сверху. Если мы пытаемся повернуть, например, налево, то мы прилагаем усилие к оси колеса. Тем частям колеса, которые в данный момент впереди, передается импульс, направленный влево, а задним частям колеса идет импульс вправо.
Но, поскольку мы быстро едем, и колесо крутится, то та часть, которая только что была впереди, оказывается сзади, и небольшой импульс, который мы успели придать этой части колеса работает уже в противоположном направлении, и поворачивает его в обратную сторону.
Получается, что из-за вращения колеса мы сами себе мешаем повернуть его. То есть, то усилие, которое мы прилагаем, чтобы повернуть колесо, нам же возвращается через пол-оборота колеса.
Любой вращающийся предмет можно назвать гироскопом. Он противодействует отклонению оси вращения, а люди этим активно пользуются:
В контроллерах современных игровых консолей и в iPhone 4 есть гироскопы, но они устроены по совсем другому принципу.
— В приборах навигации в самолетах и космических аппаратах. Хорошо сбалансированный гироскоп на специальных шарнирах, установленный на самолет, всегда сохраняет свое положение в пространстве, никакие фигуры высшего пилотажа не собьют его. Это позволяет приборам самолета всегда знать, где низ.
— В оружии. Пуля при стрельбе закручивается, что придает ей гораздо большую устойчивость, это сильно повышает точность стрельбы.
— Колеса велосипеда или мотоцикла работают как гироскопы, и это не дает ездоку упасть. На велосипеде сложнее ехать медленно, чем быстро, потому что на большой скорости колеса крутятся быстрее и делают его устойчивее.
— Есть много игрушек, где главная деталь — гироскоп: всевозможные волчки и йо-йо, с которыми можно делать вот такие трюки:
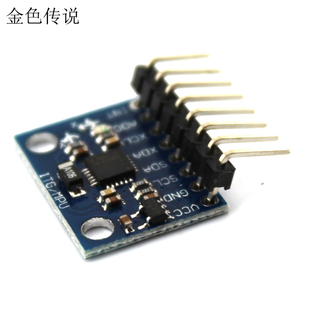
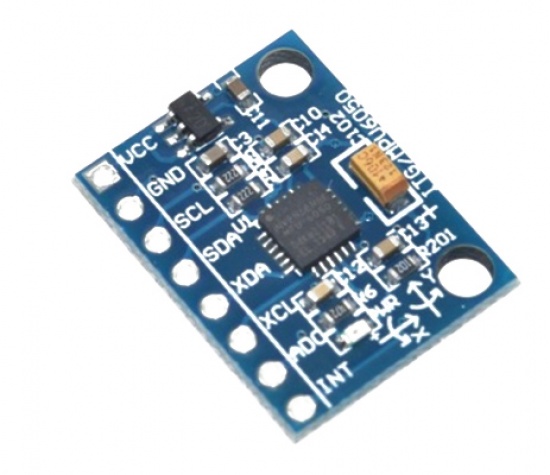
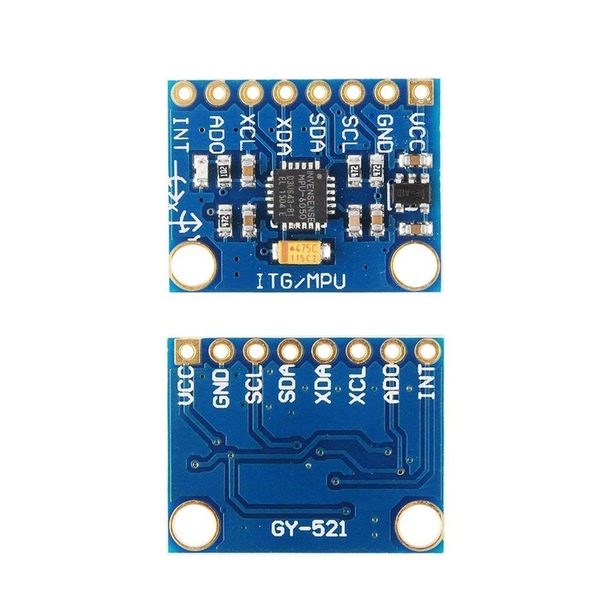
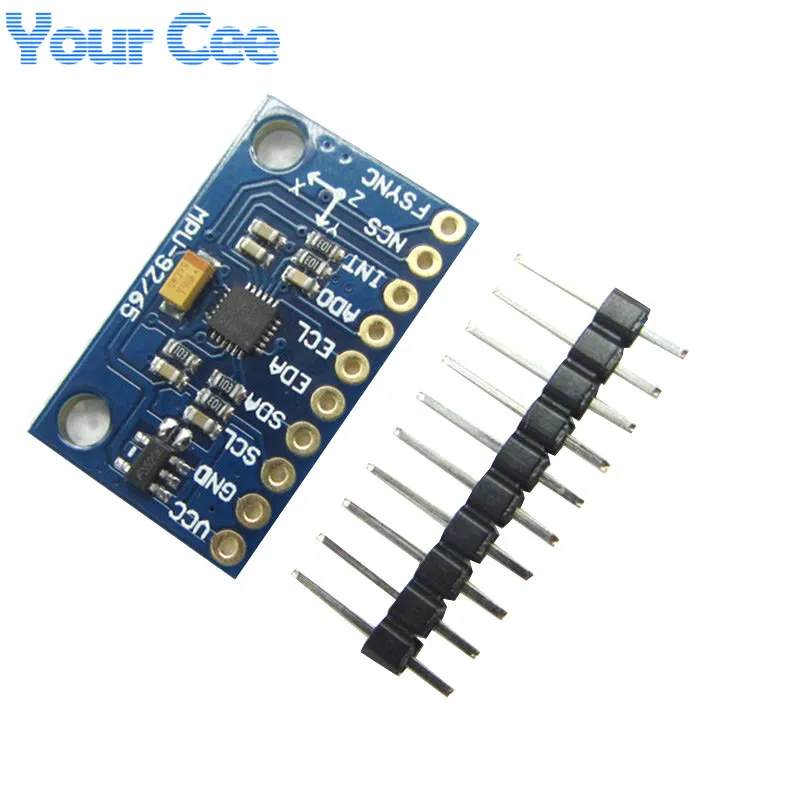
MPU-6050 — гироскоп — акселерометр — Avislab
Трехосевой гироскоп с трехосевым акселерометром MPU-6050 очень доступен по цене, чем и приобрел себе популярность. Этот датчик применяется для определения положения в пространстве, в системах стабилизации положения, стабилизации прямолинейного движения и движения по заданной кривой. Например, в балансирных роботах, в игровых приставках, применяется в робототехнике, для измерения углов наклона, скорости вращения, в авиамоделизме его применяют в автопилотах. Датчик может применяться для измерения перегрузок и тому подобное.
Этот датчик применяется для определения положения в пространстве, в системах стабилизации положения, стабилизации прямолинейного движения и движения по заданной кривой. Например, в балансирных роботах, в игровых приставках, применяется в робототехнике, для измерения углов наклона, скорости вращения, в авиамоделизме его применяют в автопилотах. Датчик может применяться для измерения перегрузок и тому подобное.
Схема подключения
Для подключения к контроллеру или микрокомпьютеру, у датчика имеется шина I2C.Документация по датчику скачать здесь: MPU-6000 and MPU-6050 Product Specification Revision 3.2 Описание регистров здесь: MPU-6000 and MPU-6050 Register Map and Descriptions Revision 4.0
Скачать примеры на Python
Для Raspberry Pi (OS: Raspbian) примеры скриптов можно скачать и развернуть так:
git clone https://github. com/avislab/sensorstest.git
com/avislab/sensorstest.gitКалибровка
Если считать данные с датчика можно заметить некоторую погрешность. Например, при абсолютном покое датчика показания гироскопа будут отличаться от нуля. А показания акселерометра по модулю могут превышать 1. См. работу скрипта mpu6050_get_raw_no_calibr.py. Дело в том, что каждый экземпляр датчика требует калибровки. У некоторых цифровых датчиков можно встретить корректировочные коэффициенты, которые для каждого экземпляра прошивают в память датчика на этапе производства. К сожалению, в этом датчике такого нет, и мы сами должны позаботиться о калибровке. Показания датчиков имеют некоторое смещение относительно нуля, что и вносит погрешность в измерения. Нам нужно учесть это смещение для каждой оси гироскопа и каждой оси акселерометра и вносить корректировку при расчетах.На самом деле присутствуют и другие погрешности. Например, трехосевые датчики должны располагаться взаимно перпендикулярно. Но при производстве трудно добиться абсолютной точности, поэтому этот угол также имеет определенные допуски и влияет на погрешность. Кроме того показания датчиков с трех осей могут иметь разную пропорциональность. В данном случае наибольшая погрешность из-за смещения относительно нуля.
Кроме того показания датчиков с трех осей могут иметь разную пропорциональность. В данном случае наибольшая погрешность из-за смещения относительно нуля.
В примере я предусмотрел процедуру калибровки. Скрипт калибровки: mpu6050_calibr.py. Калибровка выполняется в два этапа. Сначала датчик должен быть неподвижен. Подразумевается, что угловые скорости равны нулю. Калибруется гироскоп. Затем калибруется акселерометр. Нужно его не спеша поворачивать во всех направлениях. Эта процедура занимает около минуты. После чего функция калибровки выдает вычисленные значения, которые нужно прописать в скрипте. На этом калибровка закончена. После калибровки погрешность значительно снизится. См. Скрипт: mpu6050_get_raw.py. В этом скрипте в следующих строках указываются калибровочные данные:
mpu.gyro_offs = {`x`: -178, `y`: 259, `z`: -104}
mpu.accel_offs = {`y`: -354, `x`: 389, `z`: -1482}
Гироскоп
Гироскоп измеряет угловые скорости по трем осям с разными пределами измерений: 250, 500, 1000, и 2000 градусов вЧто такое гироскоп в смартфоне и зачем он нужен?
Множеством интересных функций и датчиков оснащены смартфоны и другие мобильные устройства. Одним из ведущих модулей является гиродатчик или гироскоп. Диковинная новинка в девайсе, выполненная на основе микроэлектромеханической системы, сделала большой рывок в усовершенствование функционала и завоевала большую симпатию среди пользователей. Происхождение слова «гироскоп» имеет давнюю историю. Оно расшифровывается как словосочетание «круг» и «смотрю».
Одним из ведущих модулей является гиродатчик или гироскоп. Диковинная новинка в девайсе, выполненная на основе микроэлектромеханической системы, сделала большой рывок в усовершенствование функционала и завоевала большую симпатию среди пользователей. Происхождение слова «гироскоп» имеет давнюю историю. Оно расшифровывается как словосочетание «круг» и «смотрю».
Родоначальником древнегреческого изречения был французский физик Леон Фуко. В XIX веке он занимался исследованием суточного вращения Земли, и этот термин подошёл для нового устройства как нельзя кстати. Гиродатчиками пользуются авиакомпании, судоходство, космонавтика. Компания Apple, производитель современных мобильных телефонов, первой взяла за основу данный функционал и внедрила его в iPhone 4. Несмотря на то, что видео ниже на английском языке, демонстрация технологии от Стив Джобса понятна без перевода.
Теперь, для того чтобы ответить на входящие звонки или полистать страницы электронной книги, достаточно только встряхнуть телефон. За счёт устройства быстро просматриваются фотографии и другие изображения, меняется музыка. Новое приложение у смартфона iPone под названием CoveFlow позволило использовать калькулятор. Теперь легко выполняются такие функции, как деление, умножение, сложение и вычитание. При повороте телефона на 90° данная функция машинально переключается на развёрнутый функционал со множеством сложных математических действий.
За счёт устройства быстро просматриваются фотографии и другие изображения, меняется музыка. Новое приложение у смартфона iPone под названием CoveFlow позволило использовать калькулятор. Теперь легко выполняются такие функции, как деление, умножение, сложение и вычитание. При повороте телефона на 90° данная функция машинально переключается на развёрнутый функционал со множеством сложных математических действий.
Наряду с легкими функциями разработчики внедрили в устройство более сложные программные обеспечения. Например, в некоторых операционных системах при помощи встряхивания телефона запускается обновление для Bluetooth или запускается специфичная программа по измерению углов наклона и уровня. Гироскоп прекрасно учитывает скорость перемещения, и определяет местоположение человека на незнакомой местности.
С технической точки зрения, гироскоп довольно сложное устройство. При его разработке, за основу взяли принцип работы акселерометра, который представляет из себя колбу с пружиной и грузом внутри. На одной стороне пружины закреплен груз, а вторая сторона пружины зафиксирована на демпфере для гашения колебания. При встряхивании (ускорении) измерительного прибора, прикрепленная масса движется и приводит в напряжение пружину.
На одной стороне пружины закреплен груз, а вторая сторона пружины зафиксирована на демпфере для гашения колебания. При встряхивании (ускорении) измерительного прибора, прикрепленная масса движется и приводит в напряжение пружину.
Такие колебания можно представить в виде данных. Если расположить три таких акселерометра перпендикулярно, то можно получить представление о том, как расположен предмет в пространстве. Поскольку технически расположить такой громоздкий измерительный прибор в смартфоне невозможно, то принцип работы оставили тот же, но груз заменили инертной массой, который расположен в очень маленьком чипе. При ускорении, меняется положение инертной массы и таки образом рассчитывается положение смартфона в пространстве.
С помощью GPS-навигации на дисплее появляется карта, которая фиксирует аналогичное направление объектов при любом повороте тела. Другими словами, если вы повернулись лицом к реке, то она автоматически отобразится на карте. При развороте на 180 градусов к водоему мгновенно происходят аналогичные изменения на мониторе. С использованием этой функции упрощается ориентировка на местности. Особенно это важно людям, занимающимся активными видами отдыха.
С использованием этой функции упрощается ориентировка на местности. Особенно это важно людям, занимающимся активными видами отдыха.
Благодаря точному учёту скорости перемещения управление смартфоном становится более удобным и гармоничным. Зачастую используют гироскопы на Андроид любители компьютерных игр — геймеры. Уникальное устройство в девайсе молниеносно превращает картинки в реальность. Особенно правдоподобными становятся гонки, симуляторы, стрелялки, Pokemon Go.
Достаточно изменить положение смартфона и скорость поворота, то езда на виртуальном автомобиле покажется вам реальной. Герои на дисплее точно направят автомат, нацелят пушку, повернут руль, поднимут в воздух вертолёт, убьют врага. Карманные монстры не будут прыгать по виртуальной траве, а станут двигаться по настоящему миру в видимой области встроенной камеры.
Конечно, это далеко не весь перечень положительных характеристик, присущих Android смартфонам и iPhone. Перечислять приятные и удобные моменты можно бесконечно. Однако не все пользователи оценили универсальные качества по достоинству. Одни предпочли отказаться от гироскопа в новом смартфоне, другие просто отключили его. И этому есть своё объяснение.
Однако не все пользователи оценили универсальные качества по достоинству. Одни предпочли отказаться от гироскопа в новом смартфоне, другие просто отключили его. И этому есть своё объяснение.
Среди многочисленных плюсов бывают малозаметные минусы.
- Из недостатков следует выделить установку отдельных приложений, реагирующих с незначительным опозданием на изменения положений в пространстве. Вроде бы сущий пустяк, но наличие этого сенсора доставляет определённые неудобства пользователю смартфона. Особенно заметны недостатки при чтении электронной книги лёжа. Читающий меняет позу, в это же время, связанный с устройством гиродатчик изменяет положение странички. Приходится в срочном порядке перенастраивать её ориентацию.
- Производители смартфонов на своих презентациях в большинстве случаев умалчивают о наличии важного датчика. При покупке новой модели присутствие гироскопа можно обнаружить в технических характеристиках гаджета в перечне датчиков. Есть и другие способы, например, установка клиента YouTube, позволяющая быстро установить функционал.
 Использование приложения AnTuTu Benchmark, Sensor Sense также устанавливает встроенный гиродатчик или его отсутствие.
Использование приложения AnTuTu Benchmark, Sensor Sense также устанавливает встроенный гиродатчик или его отсутствие.
Современный элемент смартфона работает на постоянной основе. Это самостоятельный датчик, не требующий калибровки. Его не нужно ни включать, ни отключать. Автоматика сделает эту работу за вас. В случае если устройство отсутствует, то вы не сможете играть в виртуальную реальность. Вам просто придётся купить новый телефон со встроенными функциями.
Если вы нашли ошибку, пожалуйста, выделите фрагмент текста и нажмите Ctrl+Enter.
Читайте также
Поделитесь в соцсетях:
-
1
0
Как я понимаю, смотря по какой оси. Если вокруг Z или X (большинство вращений), то нет, а если вокруг Y, то да.
 Но вращение вокруг Y можно отследить и компасом (но искусственные поля от приборов могут мешать).
Но вращение вокруг Y можно отследить и компасом (но искусственные поля от приборов могут мешать). -
3
0
Для поворота экрана не нужен гироскоп, достаточно акселерометра.
-
2
0
А сами как думаете?
-
3
0
Здравствуйте, в первую очередь спасибо большое за такую интересную и полезную статью,я узнал очень многое. Но вот возник один вопрос, а обычный поворот экрана в телефоне тоже считается результатом работы гиродатчика?
 org/Comment» itemscope=»»>
org/Comment» itemscope=»»>
1
0
Гироскоп действительно маленькая, но высокотехнологичная и зачастую незаменимая вещь в смартфоне. Лично мне как охотнику очень помогает в определении пройденного пути, использовании программного компаса, а так же при просмотре карт в различном разрешении.
-
3
0
Статья не только познавательная,но и с технической точки зрения точно обоснована и аргументирована. Автор детально и при этом доступно раскрывает тему. Большое спасибо.
-
3
0
Данная функция в современных реалиях действительно востребована в смартфонах и планшетах.
 Все мы когда-то чего-то не знали и только лишь немногие продолжают интересоваться и чему-то учиться. Все поправимо. Удачи!
Все мы когда-то чего-то не знали и только лишь немногие продолжают интересоваться и чему-то учиться. Все поправимо. Удачи! -
2
0
Познавательная статья! Пользуюсь каждый день телефоном, а как он устроен по сути и не знаю. Привыкла, что если функция поворота экрана включена, то она работает. Современные геймеры наверно уже не представляют своей жизни, без этого гиродатчика, ведь они бы не смогли бы играть в того же самого Покемон ГО.
— learn.sparkfun.com
Что такое гироскоп
Гироскопы или гироскопы — это устройства, которые измеряют или поддерживают вращательное движение. Гироскопы MEMS (микроэлектромеханические системы) — это небольшие недорогие датчики, измеряющие угловую скорость. Единицы угловой скорости измеряются в градусах в секунду (° / с) или оборотах в секунду (RPS). Угловая скорость — это просто измерение скорости вращения.
Угловая скорость — это просто измерение скорости вращения.
, аналогичные приведенному выше, могут использоваться для определения ориентации и используются в большинстве автономных навигационных систем. Например, если вы хотите сбалансировать робота, гироскоп можно использовать для измерения вращения из сбалансированного положения и отправки поправок на двигатель.
Основные понятия в этом руководстве
Перед тем, как погрузиться в это руководство, вы можете прочитать некоторые из этих концепций, если вы с ними не знакомы.
Как работает гироскоп
Когда вещи вращаются вокруг оси, они имеют так называемую угловую скорость .Вращающееся колесо можно измерять в оборотах в секунду (RPS) или градусах в секунду (° / s).
Обратите внимание, что ось z гироскопа ниже совмещена с осью вращения колеса.
Если вы прикрепите датчик к колесу, показанному выше, вы можете измерить угловую скорость оси z гироскопа. Две другие оси не будут измерять вращение.
Две другие оси не будут измерять вращение.
Представьте, если колесо вращается раз в секунду. У него будет угловая скорость 360 градусов в секунду.Также важно направление вращения колеса. По часовой стрелке вокруг оси или против часовой стрелки?
Трехосный гироскоп MEMS, подобный изображенному выше (ITG-3200), может измерять вращение вокруг трех осей: x, y и z. Некоторые гироскопы бывают одноосных и двухосных, но трехосный гироскоп в одном кристалле становится меньше, дешевле и популярнее.
Гироскопычасто используются на объектах, которые совсем не вращаются очень быстро. Самолеты (надеюсь) не крутятся.Вместо этого они поворачиваются на несколько градусов по каждой оси. Обнаруживая эти небольшие изменения, гироскопы помогают стабилизировать полет самолета. Также обратите внимание, что ускорение или линейная скорость самолета не влияет на измерения гироскопа. Гироскопы измеряют только угловую скорость.
Как гироскоп MEMS определяет угловую скорость?
Внутренний вид гироскопического датчика MEMS
Датчик гироскопа внутри МЭМС крошечный (от 1 до 100 микрометров, размером с человеческий волос).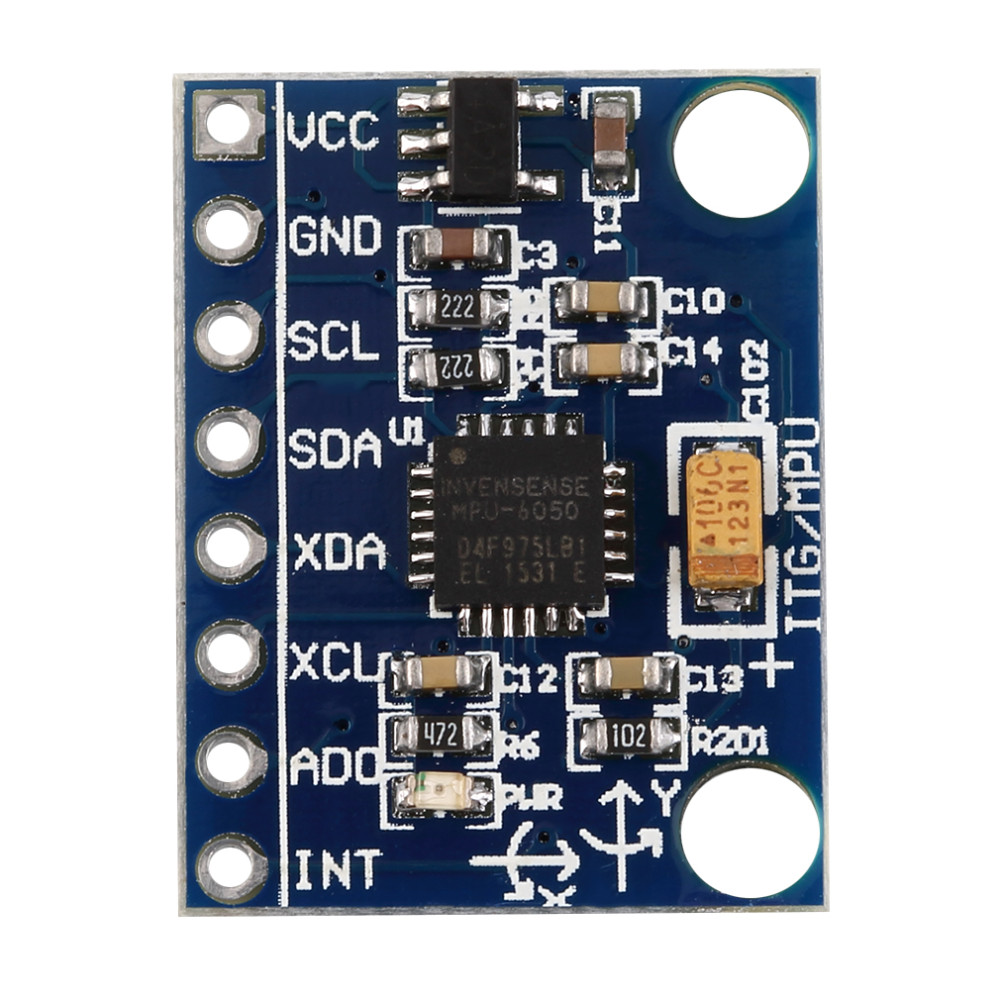 Когда гироскоп вращается, небольшая резонирующая масса смещается при изменении угловой скорости. Это движение преобразуется в очень слаботочные электрические сигналы, которые могут усиливаться и считываться микроконтроллером хоста.
Когда гироскоп вращается, небольшая резонирующая масса смещается при изменении угловой скорости. Это движение преобразуется в очень слаботочные электрические сигналы, которые могут усиливаться и считываться микроконтроллером хоста.
Как подключиться к гироскопу
Основными аппаратными соединениями для использования гироскопа являются power и интерфейс связи . Как всегда, обратитесь к техническому описанию датчика за всей информацией о технических характеристиках и примерах соединений.
Интерфейс связи
Гироскопымогут иметь цифровой интерфейс или аналоговый .
-
Гироскопы с цифровым интерфейсом обычно используют протоколы связи SPI или I2C. Использование этих интерфейсов позволяет легко подключиться к микроконтроллеру хоста. Одним из ограничений цифрового интерфейса является максимальная частота дискретизации. I2C имеет максимальную частоту дискретизации 400 Гц.
 SPI, с другой стороны, может иметь гораздо более высокую частоту дискретизации.
SPI, с другой стороны, может иметь гораздо более высокую частоту дискретизации. -
Гироскопы с аналоговым интерфейсом представляют скорость вращения с помощью переменного напряжения, обычно между землей и напряжением питания. Для считывания сигнала может использоваться АЦП на микроконтроллере. Аналоговые гироскопы могут быть менее дорогими, а иногда и более точными, в зависимости от того, как вы читаете аналоговый сигнал.
Мощность
Гироскопы MEMS обычно маломощные. Рабочие токи находятся в диапазоне мА, а иногда и мкА.Напряжение питания для гироскопов обычно составляет 5 В или меньше. Цифровые гироскопы могут иметь выбираемые логические напряжения или работать от напряжения питания. Для любого цифрового интерфейса не забудьте подключить линии от 5 до 5 В и от 3,3 до 3,3 В. Кроме того, гироскопы с цифровыми интерфейсами могут иметь режимы пониженного энергопотребления и сна, что позволяет использовать их в приложениях с батарейным питанием. Иногда это преимущество перед аналоговым гироскопом.
Иногда это преимущество перед аналоговым гироскопом.
Как выбрать гироскоп
При выборе типа гироскопа необходимо учитывать множество спецификаций.Вот несколько наиболее важных полезных:
Диапазон
Диапазон измерения или диапазон полной шкалы — это максимальная угловая скорость, которую может прочитать гироскоп. Подумайте о том, что вы измеряете. Вам нужно измерить вращение проигрывателя, которое очень медленно, или вращающегося колеса, которое может быть очень быстрым?
Чувствительность
Чувствительность измеряется в мВ на градус в секунду (мВ / ° / с). Не позволяйте странному измерению этой ценности вас напугать.Он определяет, насколько изменяется напряжение при заданной угловой скорости. Например, если указан гироскоп с чувствительностью 30 мВ / ° / с, и вы видите изменение выходного сигнала на 300 мВ, вы повернули гироскоп со скоростью 10 ° / с.
Хорошее правило, которое следует запомнить: с увеличением чувствительности диапазон уменьшается. Например, посмотрите техническое описание гироскопа LPY503 или любой гироскоп с выбираемым диапазоном:
Например, посмотрите техническое описание гироскопа LPY503 или любой гироскоп с выбираемым диапазоном:
Обратите внимание, что с большим диапазоном страдает чувствительность и вы получаете меньшее разрешение.
Смещение
Как и в случае с любым другим датчиком, измеряемые вами значения будут содержать некоторую погрешность или смещение. Вы можете увидеть смещение гироскопа, измерив выходной сигнал, когда гироскоп неподвижен. Хотя вы думаете, что видите 0 °, когда гироскоп неподвижен, вы всегда будете видеть небольшую ненулевую ошибку на выходе. Эти ошибки иногда называют дрейфом смещения или нестабильностью смещения. На смещение сильно влияет температура сенсора. Чтобы свести к минимуму источник этой ошибки, большинство гироскопов имеют встроенный датчик температуры.Таким образом, вы можете считывать температуру датчика и исправлять любые изменения, зависящие от температуры. Чтобы исправить эти ошибки, гироскоп должен быть откалиброван. Обычно это делается, удерживая гироскоп неподвижным и обнуляя все показания в вашем коде.
Идем дальше
К настоящему времени вы должны знать, как работает гироскоп, и иметь хорошую основу, чтобы начать работу с гироскопом в своем собственном проекте.
Ознакомьтесь с этими руководствами, в которых используются гироскопы:
Акселерометрпротив датчика гироскопа и IMU, как выбрать один?
С ростом популярности датчиков акселерометра и гироскопа MEMS для определения движения Arduino, многие рассматривают возможность выбора одного из них, чтобы начать свой следующий проект.Однако, учитывая множество доступных опций, выбор подходящего может оказаться сложной задачей.
Прежде, чем беспокоиться о том, как выбрать акселерометр и гироскоп, вам сначала нужно узнать разницу между ними.
В этом руководстве я расскажу вам следующее:
- Что такое акселерометр?
- Что такое гироскоп?
- В чем разница между акселерометром и гироскопом?
- Как выбрать акселерометр?
- Как выбрать гироскоп?
- Достойные упоминания с IMU
Что такое акселерометр?
Акселерометры — это электромеханические устройства , которые измеряют ускорение, скорость изменения скорости объекта. Другими словами, это устройства, которые реагируют на любые вибрации, связанные с движением.
Другими словами, это устройства, которые реагируют на любые вибрации, связанные с движением.
Как работает акселерометр?
Акселерометры работают двумя способами; Пьезоэлектрический эффект и изменение емкости. Это сбивает с толку? Это относительно просто. Вот как это сделать:
Пьезоэлектрический эффект:
- Акселерометры содержат микроскопические кристаллические структуры, генерирующие напряжение при возникновении вибрации
- Генерируемое напряжение будет определять величину ускорения
Изменение емкости:
Этот метод играет с формулой для определения ускорения.Поскольку мы знаем, что Сила = Масса x Ускорение, чтобы найти ускорение, потребуется Сила / Масса объекта.
Вот как работает эффект емкости в акселерометре MEMS:
- Имеются 2 емкостные пластины
- Масса объекта давит на одну из пластин конденсатора, изменяя емкость и позволяя измерить силу
- При известных силе и массе объекта затем измеряется ускорение
Акселерометры MEMS
Акселерометры могут быть основаны на других принципах работы, например, акселерометры mems с микрочипом.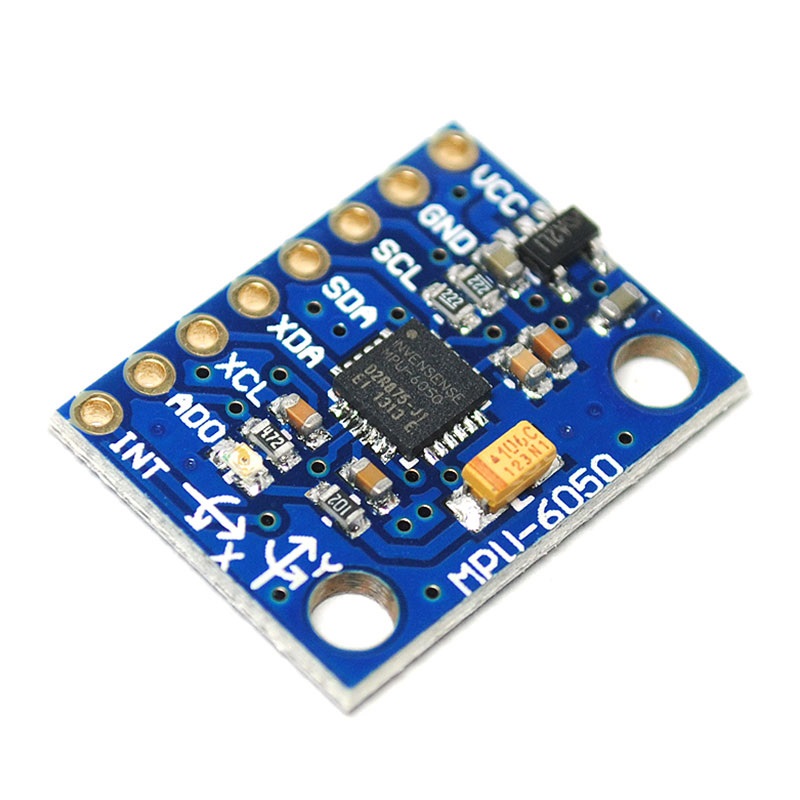 В наши дни акселерометры Mems предназначены для простой интеграции с Arduino или другими микроконтроллерами, наиболее распространенными из которых являются датчики серии ADXL (популярные — ADXL345, ADXL335).
В наши дни акселерометры Mems предназначены для простой интеграции с Arduino или другими микроконтроллерами, наиболее распространенными из которых являются датчики серии ADXL (популярные — ADXL345, ADXL335).
Благодаря своим миниатюрным датчикам акселерометры Mems подходят для использования в IoT, маломощных, промышленных и автомобильных приложениях, здравоохранении и т. Д.
Приложения акселерометров
Теперь, когда мы поняли, как работает акселерометр, мы рассмотрим, для чего он обычно используется.Вот основной список приложений:
- Приложения компаса / карты на смартфонах (iPhone, Andriod и т. Д.) С осевым зондированием
- Определение наклона; iPhone использует акселерометр, чтобы определить, находится ли телефон в портретном или ландшафтном режиме.
- Обнаружение землетрясения
- Обнаружение падения
- Медицинские устройства, такие как искусственные части тела
- Фитнес-трекеры / носимые устройства
- Игры / приложения, требующие обнаружения движения ( Wii, Kinect и т.
 Д.)
Д.)
Примечание. Акселерометры обычно используются для определения положения, скорости, вибрации и определения ориентации.
Что такое гироскоп?
Прежде чем мы коснемся различий, нам нужно сначала понять, что такое гироскоп. Гироскоп — это устройство, используемое для измерения вращательных изменений или поддержания ориентации. Он основан на принципе сохранения углового момента.
Как работает гироскоп?
Типичный гироскоп содержит ротор, подвешенный внутри трех колец, называемых карданом.
Он работает за счет эффекта прецессии, позволяя гироскопам преодолевать гравитацию при вращении оси вращения. Это означает, что вместо того, чтобы упасть под действием силы тяжести, он автоматически поворачивается в сторону.
Чтобы узнать больше о том, как работают гироскопы, прочтите эту статью!
Приложения гироскопа
Понять, как это работает, — это одно, но для чего он используется? Несмотря на то, что гироскопы датируются 18 веком, они все еще используются и сейчас, и они стали неотъемлемой частью навигационных систем, которые мы обычно видим сегодня:
- Самолеты
- Космические станции
- Устойчивость транспортных средств; мотоциклы, корабли
- Инерциальные системы наведения
- Потребительская электроника через гироскопы MEMS (большинство телефонов Andriod среднего и высшего класса)
Гироскоп MEMS
Вам может быть интересно, что такое гироскопы MEMS? Разве гироскопы не просто гироскопы?
Гироскопы MEMS — это небольшие миниатюрные датчики, разработанные благодаря интеграции в них технологии MEMS (Micro-Electro-Mechanical-System).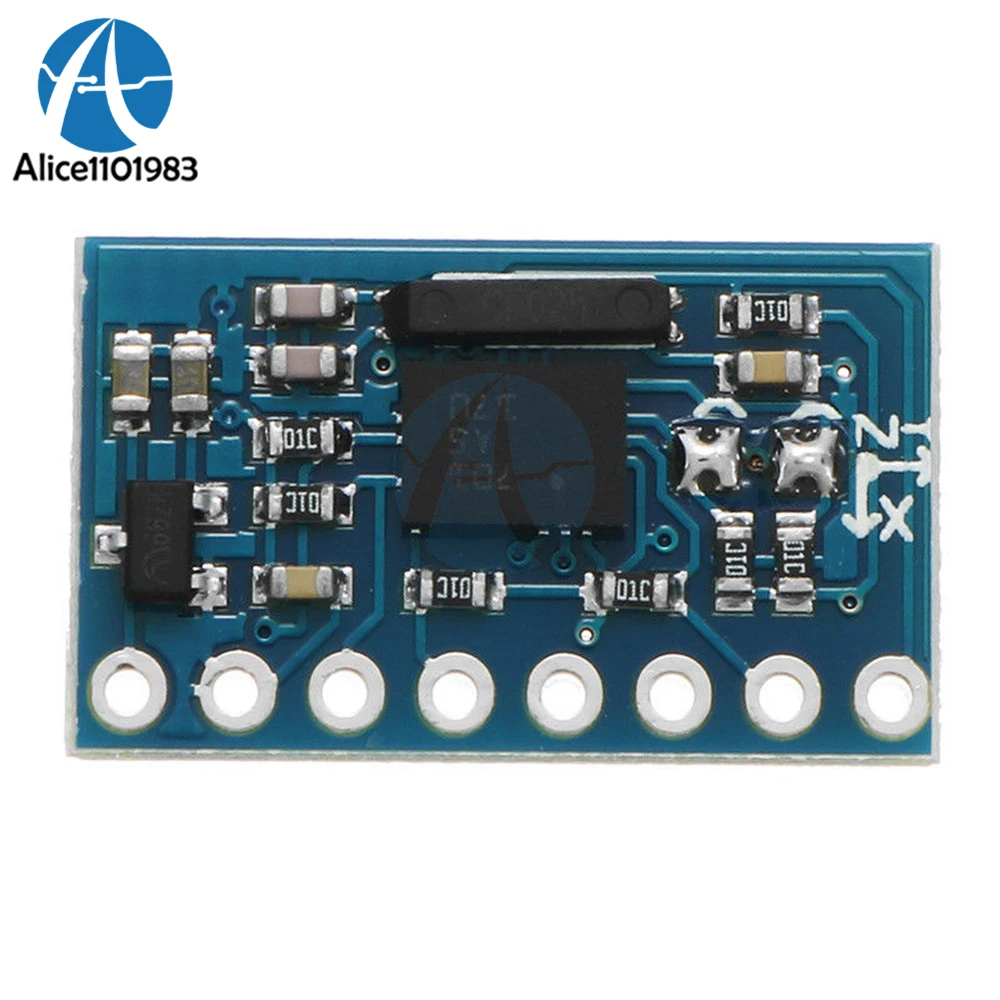 Это позволяет использовать функции гироскопов в меньшем корпусе!
Это позволяет использовать функции гироскопов в меньшем корпусе!
Подобно акселерометрам MEMS, с такой технологией, он обеспечивает более низкую стоимость, меньшую мощность и применимость с вашими Arduino, Raspberry Pi и т. Д.!
Акселерометр и гироскоп
Разница акселерометра и гироскопа:
Для облегчения понимания разницы между акселерометром и гироскопом я для иллюстрации привел сравнительную таблицу:
| Акселерометры | Гироскопы | |
|---|---|---|
| Что это такое | Электромеханические устройства, измеряющие ускорение Невозможно отличить вращение от ускорения |
Устройство, используемое для измерения угловых изменений или поддержания ориентации Не подвержено ускорению |
| Назначение | Измерение линейного ускорения на основе вибрации | Измерение скорости вращения и углового положения вокруг определенной оси |
| Приложения | Обычно встречается и применяется в бытовой электронике | Обычно встречается и применяется в самолетах и летательных аппаратах |
В целом, хотя оба устройства имеют свои заметные различия, многие устройства все еще выигрывают от наличия обоих датчиков. В конечном итоге все сводится к тому, какие приложения вы ищете.
В конечном итоге все сводится к тому, какие приложения вы ищете.
Как выбрать акселерометр и гироскоп?
Как выбрать акселерометр?
Чтобы помочь вам выбрать подходящий акселерометр MEMS для Arduino, вот важные критерии, которые вы должны учитывать!
| Критерии | Рекомендации / соображения |
|---|---|
| Диапазон | Для точных показаний: Выберите меньший диапазон полной шкалы, так как он даст вам более точные показания благодаря более чувствительному выходному сигналу. Рассмотрите диапазоны ускорения, которые подходят для ваших проектов. |
| Интерфейс | Самый простой интерфейс для работы: Аналоговый интерфейс, поскольку аналого-цифровые преобразователи (АЦП) реализованы в большинстве микроконтроллеров Для получения фиксированной частоты: интерфейс Большинство функций и меньший уровень шума: |
| Оси | Трехосные акселерометры, наиболее распространенные и не намного более дорогие по сравнению с одно- или двухосными акселерометрами |
| Энергопотребление | Требуемый ток, потребляемый акселерометром, обычно находится в диапазоне сотен мкА. Примите во внимание требуемую мощность. |
| Бонусные функции | Выбор более новых моделей акселерометров может быть лучшим выбором, поскольку они включают в себя больше бонусных функций, таких как: Выбираемые диапазоны измерения Контроль сна Обнаружение 0-g Обнаружение касания |
Какой акселерометр купить?
На основании вышеуказанных критериев я рекомендую эти акселерометры, доступные в Seeed!
Grove — 3-осевой цифровой акселерометр со сверхнизким энергопотреблением ± 16 г (BMA400)
Основанный на датчике BMA400, этот 3-осевой цифровой акселерометр представляет собой 12-разрядный трехосный датчик ускорения с функциями интеллектуального управления движением и прерыванием по положению.С легкостью обнаруживайте движения, такие как ходьба, бег, стояние!
Оценка критериев:
| Критерии | Оценка | |
| Диапазон | ± 2g, ± 4g, ± 8g, ± 16g | |
| Интерфейс | I2C Оси | 3 оси |
| Потребляемая мощность | 18 мкА при 5 В, 14 мкА при 3. 3V 3V | |
| Дополнительные функции | Авто-низкое энергопотребление / пробуждение Активность / бездействие Счетчик шагов Распознавание активности (ходьба, бег, неподвижность) Обнаружение ориентации Касание / двойное касание |
Хотите узнать больше? Более подробная информация об акселерометре Arduino доступна на нашей вики-странице здесь!
Трехосевые акселерометры ADXL серии
Помимо вышеуказанного акселерометра на базе BMA400, популярная серия ADXL также доступна для покупки здесь, в Seeed! Предлагаем вашему вниманию следующие 3-осевые акселерометры ADXL:
| Продукт | Диапазон измерений | Интерфейс | Потребляемая мощность | Дополнительные функции |
| Grove — 3-осевой аналоговый акселерометр ± 20 г (ADXL356B) | ± 10 | ± 202 Аналоговый режим измерения : 150 мкА режим ожидания: 21 мкА | Низкий, дрейф, низкий уровень шума; идеален для беспроводного мониторинга состояния Герметичный корпус, обеспечивающий отличную долгосрочную стабильность смещения 0g по сравнению стемпература (по всем осям): 0,75 мг / ° C максимум | |
| Grove — 3-осевой аналоговый акселерометр ± 40 г (ADXL356C) | ± 10 г ± 40 г | Аналоговый | режим измерения: 150 мкА режим ожидания: 21 мкА | Низкий, дрейфовый, низкий уровень шума; идеален для беспроводного мониторинга состояния Герметичный корпус, обеспечивающий превосходную долгосрочную стабильность Смещение 0g в зависимости от температуры (все оси): 0,75 мг / ° C максимум |
| Grove — 3-осевой цифровой акселерометр ± 40 г (ADXL357) | ± 10 г при 51200 LSB / г ± 20 г при 25600 LSB / г ± 40 г при 12800 LSB / г | Цифровой I2C | Режим измерения: 200 мкА | Малый дрейф, низкий уровень шума, малое энергопотребление A герметичный корпус, обеспечивающий превосходную долговременную стабильность. Поддержка FIFO (96 * 21 бит) |
| Grove — 3-осевой цифровой акселерометр ± 200 г (ADXL372) | ± 200 г | Цифровой I2C | режим измерения: 22 мкА | Глубокий встроенный FIFO для минимизации нагрузки на хост-процессор Выбираемый коэффициент передискретизации и пропускная способность |
 температура (по всем осям): 0,75 мг / ° C максимум
температура (по всем осям): 0,75 мг / ° C максимум The Grove — 3-осевой аналоговый акселерометр ± 20 г (ADXL356B) и Grove — 3-осевой цифровой акселерометр ± 200 г (ADXL372) в настоящее время нет в наличии, но внимательно следите за его пополнением, подписавшись или рассмотрите ADXL356C и ADXL357!
Как выбрать гироскоп?
Теперь, когда вы поняли, как выбрать подходящий акселерометр, вот критерии, которые помогут вам с легкостью выбрать гироскоп!
| Критерии | Соображения / Рекомендации |
|---|---|
| Диапазон | При выборе гироскопа убедитесь, что максимальный диапазон гироскопа не превышает максимальную угловую скорость, которую вы хотите измерить. |
| Интерфейс | Подобно интерфейсам акселерометра, выбор гироскопов с аналоговым выходом приведет к простейшей интеграции с вашим микроконтроллером. Однако выбор гироскопа с цифровым интерфейсом является привлекательным вариантом, поскольку он, как правило, имеет больше функций Вам не придется очень беспокоиться об этом критерии, так как большинство гироскопов на рынке имеют аналог |
| Количество осей | Гироскопы доступны с 1, 2 или 3 осями, и вам нужно будет решить, какой из этих трех гироскопов будет измерять, поскольку это повлияет на вращение. Некоторые 2-осевые гироскопы измеряют оси Y и Z, в то время как другие измеряют Y и Оси X |
| Энергопотребление | Чтобы избежать чрезмерного / недостаточного питания, проверьте, сколько энергии будет потреблять гироскоп, если ваш проект работает от батареи |
| Бонусные функции | Гироскопы, как правило, не предлагают много дополнительных функций, кроме вывода температуры. Если есть дополнительные функции, это было бы плюсом! |
Какие гироскопы купить?
На основании вышеперечисленных критериев я рекомендую покупать эти гироскопы!
Примечание: Следующие рекомендации относятся к гироскопам, интегрированным вместе с акселерометром, что позволяет использовать их функции всего в одном модуле!
Grove — 6-осевой акселерометр и гироскоп
Этот 6-осевой акселерометр и гироскоп, основанный на микросхеме LSM6DS3, представляет собой экономичный вариант с подробным SDK для упрощения программирования с вашим Arduino!
Оценка критериев:
| Критерии | Оценка |
| Диапазон | Гироскоп: ± 125, ± 245, ± 500, ± 1000, ± 2000 градусов в секунду (dps) Акселерометр: |
| Интерфейс | I2C |
No. осей осей | 3-осевой гироскоп 3-осевой акселерометр |
| Энергопотребление | Комбинированный нормальный режим: 0,9 мА Комбинированный высокопроизводительный режим: 1,25 мА |
| Бонусные функции 84 9026 |
Хотите узнать больше? Более подробная информация вместе с этим руководством по гироскопу Arduino доступна на нашей вики-странице здесь!
Grove — 6-осевой акселерометр и гироскоп (BMI088)
Основанный на гироскопе BOSCH BMI088,
, этот 6-осевой акселерометр и гироскоп разработан для дронов, робототехники и промышленных приложений с возможностью удовлетворения сложных требований к производительности!
Оценка критериев:
| Критерии | Оценка |
| Диапазон | Гироскоп: ± 125 ° / с @ 262.  1 LSB / ° / с 1 LSB / ° / с ± 250 ° / с при 131,1 LSB / ° / с ± 500 ° / с при 65,5 LSB / ° / с ± 1000 ° / с при 32,8 LSB / ° / с ± 2000 ° / с при 16,4 младших значащих бит / ° / с Акселерометр: |
| Интерфейс | I2C |
| Кол-во осей | Трехосный гироскоп 16 бит Трехосный акселерометр 16 бит |
| Потребляемая мощность | Рабочее напряжение: 3.3V / 5V Низкое энергопотребление в зависимости от используемого гироскопа |
| Дополнительные функции | Низкий спектральный шум |
Хотите узнать больше? Более подробная информация вместе с этим руководством по гироскопу Arduino доступна на нашей вики-странице здесь!
Почетные грамоты
Гироскоп, акселерометр, датчик магнитометра (IMU)
Акселерометры и гироскопы — отличные варианты, чтобы начать работу с датчиком движения, но если вы погрузитесь глубже и изучите другие варианты, вы обнаружите, что у вас есть инерциальные измерительные устройства (IMU).
— это, по сути, акселерометры + гироскопы + датчики магнитометра, что делает его полным пакетом, способным легко вычислять ориентацию, положение и скорость!
Здесь, в Seeed, мы также предлагаем IMU на ваш выбор, вот некоторые из них, которые стоит рассмотреть!
Роща — IMU 9DOF v2.0
Хотите начать работу с IMU? Роща — IMU 9DOF — отличное место для начала!
Оснащенный 3-осевым гироскопом, 3-осевым акселерометром и 3-осевым магнитометром, это 9-осевой модуль отслеживания движения на основе MPU-9250.
Его функции включают:
- Сверхнизкое энергопотребление, низкое напряжение
- Широкий диапазон обнаружения
- Внутренний процессор Digital Motion Processing ™ (DMP ™) поддерживает расширенные функции обработки движения и функции низкого энергопотребления, такие как распознавание жестов с использованием программируемых прерываний.
- Функция самопроверки
- Digital- выходной 3-осевой датчик угловой скорости (гироскопы) с программируемым пользователем диапазоном полной шкалы ± 250, ± 500, ± 1000 и ± 2000 ° / с
- 3-осевой акселерометр с цифровым выходом и программируемой полной шкалой диапазон ± 2 г, ± 4 г, ± 8 г и ± 16 г
- Трехосевой акселерометр с цифровым выходом и полным диапазоном измерения ± 4800 мкТл
Хотите узнать больше? Вы можете перейти на страницу продукта, чтобы узнать больше!
Роща — IMU 10DOF v2.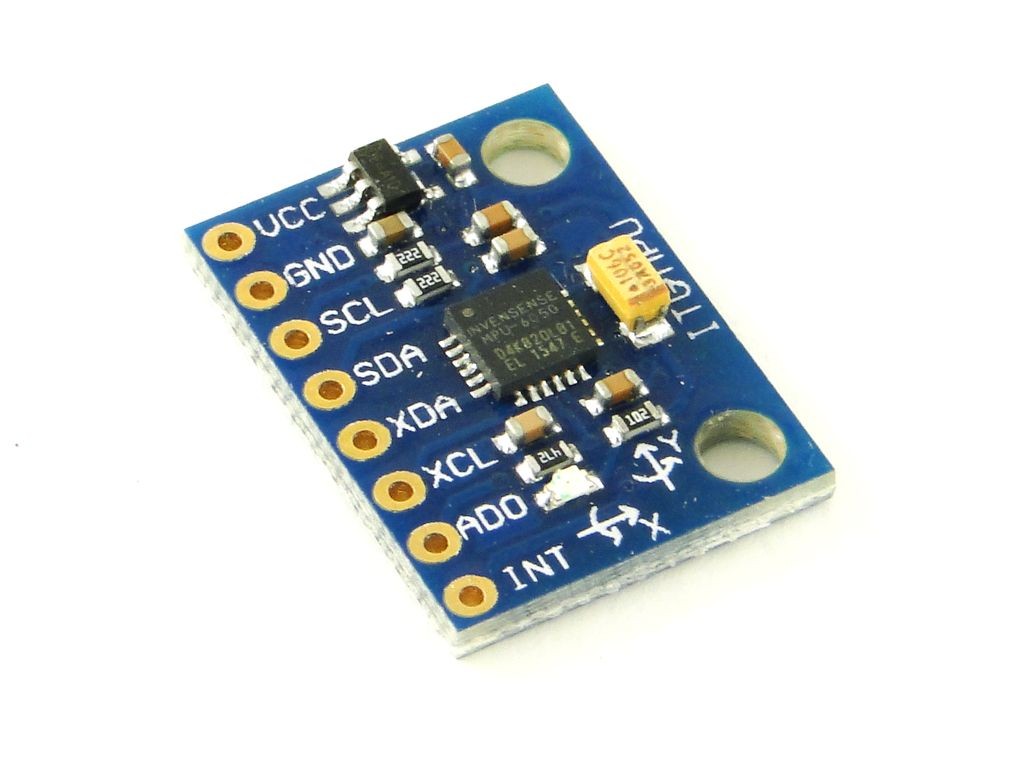 0
0
Требуется существенное обновление по сравнению с предыдущей рекомендацией? Grove — IMU 10DOF v2.0 предоставляет вам в общей сложности 10 осей данных, гораздо больше приложений и лучшую производительность!
Созданный на основе новых и улучшенных Bosch BMP280 и MPU-250, наряду с цифровым процессором движения (DMP) в корпусе 3 * 3 * 1 мм, этот IMU не только маленький, но и потребляет намного меньше энергии!
- Для получения дополнительной информации о MPU-9250 и BMP280 обратитесь к соответствующим таблицам данных
Его функции включают:
- Датчики угловой скорости осей X, Y и Z с цифровым выходом (гироскопы) с программируемым пользователем диапазоном полной шкалы ± 250, ± 500, ± 1000 и ± 2000 ° / сек.
- выходной 3-осевой акселерометр с программируемым диапазоном полной шкалы ± 2g, ± 4g, ± 8g и ± 16g
- Магнитометр с цифровым выходом и полным диапазоном шкалы ± 4800uT
- Измерение температуры с ± 1.
 Точность 0 ° C
Точность 0 ° C - Диапазон измерения атмосферного давления 300 — 1100 гПа с точностью ± 1,0 гПа
Хотите узнать больше? Вы можете перейти на страницу продукта, чтобы узнать больше!
Сводка
Вот и все на сегодняшний день руководства по акселерометрам, гироскопам и выбору подходящего. Учитывая растущую популярность обоих, пришло время выбрать один для себя! Подходящий!
Следите за нами и ставьте лайки:
Теги: 9DOF, акселерометр, акселерометр Arduino, руководство по акселерометру, акселерометр против гироскопа, ADXL335, ADXL356C, adxl357, adxl372, bma400, акселерометр Grove, гирометр, гироскоп, гироскоп Arduino, IMU, lsm303, акселерометр, акселерометрПродолжить чтение
|
Силы, действующие через центр тяжести гироскопа, известны как силы перемещения и не изменяют угол плоскости вращения, а перемещают гироскоп как единое целое.
|
|
Ось гироскопа, как и ось волчка, будет стремиться оставаться неподвижной в пространстве, но если она будет возмущена внешней силой, она будет перемещаться или прецессировать под прямым углом к приложенной силе.Сопротивление прецессии прямо пропорционально угловому моменту гироскопа , который является произведением его массы и скорости вращения.
|
|
|
|
|
|
Гирокомпас
Гирокомпас использует вращающийся гироскоп, предварительно настроенный на север (или любой другой желаемый пеленг), и он будет поддерживать этот опорный пеленг независимо от того, какие маневры может совершать транспортное средство, на котором он установлен.
|
|
Акселерометры
Разработано много устройств для измерения ускорения.Показанное здесь механическое устройство использует гироскопические силы для определения ускорения. |
|
Изображение Public Domain — изменено Устройство PIGA, по сути, представляет собой гироскоп, ограниченный электрическим моментным двигателем, используемый для измерения ускорения и скорости путем интегрирования ускорения во времени. |
|
Стабилизированная платформа и инерциальная навигация
инерциальные навигационные системы основаны на стабилизированной платформе, состоящей эталонной из трех ортогональных гироскопов, которые поддерживают опорную ориентацию фиксированной в пространстве, независимо от любого движения транспортного средства, в котором они установлены.Используя акселерометры, такие как датчик PIGA выше, или электронные датчики в сочетании с интеграторами, можно определить положение в пространстве и ориентацию транспортного средства.
Основным преимуществом инерциальной навигационной системы является то, что она работает независимо от сигналов с земли. Однако это мертвая система счисления с накоплением ошибок, которые увеличиваются по мере увеличения продолжительности или расстояния путешествия. |
 Таким образом, вращающийся гироскоп может свободно перемещаться в пространстве с помощью его несущей рамы, не нарушая плоскость вращения ротора.
Таким образом, вращающийся гироскоп может свободно перемещаться в пространстве с помощью его несущей рамы, не нарушая плоскость вращения ротора.  В отличие от магнитного компаса, гирокомпас невосприимчив к влиянию близлежащих магнитных (железных) структур, которые могут вызвать неточности в пеленгах, указанных стрелкой на магнитном компасе.
В отличие от магнитного компаса, гирокомпас невосприимчив к влиянию близлежащих магнитных (железных) структур, которые могут вызвать неточности в пеленгах, указанных стрелкой на магнитном компасе.  Он также используется для измерения пройденного расстояния путем интегрирования скорости во времени.Эта вторая интеграция первоначально выполнялась механическими интеграторами, но теперь выполняется электронным способом.
Он также используется для измерения пройденного расстояния путем интегрирования скорости во времени.Эта вторая интеграция первоначально выполнялась механическими интеграторами, но теперь выполняется электронным способом. 
Infogalactic: ядро планетарного знания
Гироскоп в действии. Обратите внимание на свободу вращения по всем трем осям. Ротор будет сохранять направление оси вращения независимо от ориентации внешней рамы. Гироскоп (от греческого γῦρος gûros , «круг» и σκοπέω skopéō , «смотреть») представляет собой вращающееся колесо или диск, ось вращения которого может принимать любую ориентацию.При вращении ориентация этой оси не зависит от наклона или поворота крепления в соответствии с сохранением углового момента.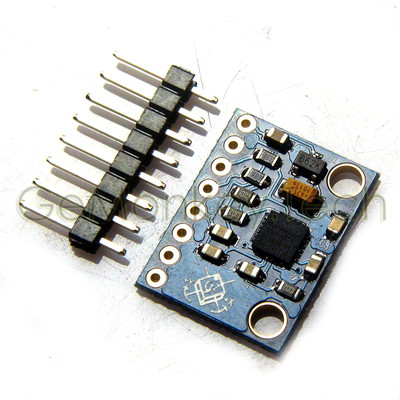 По этой причине гироскопы полезны для измерения или сохранения ориентации. [1] [2]
По этой причине гироскопы полезны для измерения или сохранения ориентации. [1] [2]
, основанные на других принципах работы, такие как электронные гироскопы MEMS с микрочипом, используемые в устройствах бытовой электроники, твердотельные кольцевые лазеры, волоконно-оптические гироскопы и чрезвычайно чувствительный квантовый гироскоп. [ необходима ссылка ]
Применения гироскопов включают инерциальные навигационные системы, в которых магнитные компасы не работают (как в телескопе Хаббла) или не будут достаточно точными (как в межконтинентальных баллистических ракетах), или для стабилизации летательных аппаратов, таких как радиоуправляемые вертолеты или беспилотные летательные аппараты. транспортные средства, прогулочные катера и коммерческие суда. Из-за своей точности гироскопы также используются в гиротеодолитах для поддержания направления при разработке туннелей. [3] Гироскопы могут использоваться для создания гирокомпасов, которые дополняют или заменяют магнитные компасы (на кораблях, самолетах и космических кораблях, транспортных средствах в целом), для обеспечения устойчивости (космический телескоп Хаббл, велосипеды, мотоциклы и корабли) или используется в составе инерциальной системы наведения.
Описание и схема
Схема гироскопа. Стрелки реакции вокруг выходной оси (синие) соответствуют силам, действующим вокруг входной оси (зеленые), и наоборот.В механических системах или устройствах обычный гироскоп представляет собой механизм, содержащий ротор, вращающийся вокруг одной оси, при этом цапфы ротора установлены во внутреннем кардане или кольце; Внутренний стабилизатор подвешен для качания во внешнем стабилизаторе, всего два кардана. [ необходима ссылка ]
Внешний стабилизатор или кольцо, которое является рамой гироскопа, устанавливается с возможностью поворота вокруг оси в своей собственной плоскости, определяемой опорой.Этот внешний стабилизатор обладает одной степенью свободы вращения, а его ось — нет. Следующий внутренний стабилизатор установлен в раме гироскопа (внешний стабилизатор) так, чтобы поворачиваться вокруг оси в своей собственной плоскости, которая всегда перпендикулярна оси вращения рамы гироскопа (внешний стабилизатор). Этот внутренний стабилизатор имеет две степени свободы вращения.
Этот внутренний стабилизатор имеет две степени свободы вращения.
Ось прялки определяет ось вращения. Ротор вращается вокруг оси, которая всегда перпендикулярна оси внутреннего кардана.Таким образом, ротор обладает тремя степенями свободы вращения, а его ось — двумя. Колесо реагирует на силу, приложенную вокруг входной оси, за счет силы реакции вокруг выходной оси.
Поведение гироскопа легче всего оценить, рассматривая переднее колесо велосипеда. Если колесо отклонено от вертикали так, что верхняя часть колеса перемещается влево, передний обод колеса также поворачивается влево. Другими словами, вращение одной оси вращающегося колеса вызывает вращение третьей оси.
Маховик гироскопа будет катиться или сопротивляться вокруг выходной оси в зависимости от того, имеют ли выходные стабилизаторы свободной или фиксированной конфигурации. Примерами некоторых устройств с подвесом со свободным выходом могут быть гироскопы для определения положения, используемые для определения или измерения углов продольного наклона, крена и рыскания в космическом корабле или самолете. [ необходима ссылка ]
[ необходима ссылка ]
Центр тяжести ротора может находиться в фиксированном положении.Ротор одновременно вращается вокруг одной оси и может колебаться вокруг двух других осей, и, таким образом, за исключением собственного сопротивления из-за вращения ротора, он может свободно вращаться в любом направлении относительно фиксированной точки. Некоторые гироскопы имеют механические эквиваленты, заменяющие один или несколько элементов. Например, вращающийся ротор может быть подвешен в жидкости вместо того, чтобы быть установленным с возможностью поворота в карданном подвесе. Гироскоп с управляющим моментом (CMG) является примером карданного устройства с фиксированным выходом, которое используется на космическом корабле для удержания или поддержания желаемого углового положения или направления наведения с помощью гироскопической силы сопротивления.
В некоторых особых случаях внешний стабилизатор (или его эквивалент) можно не устанавливать, чтобы ротор имел только две степени свободы. В других случаях центр тяжести ротора может быть смещен относительно оси колебаний, и, таким образом, центр тяжести ротора и центр подвески ротора могут не совпадать.
В других случаях центр тяжести ротора может быть смещен относительно оси колебаний, и, таким образом, центр тяжести ротора и центр подвески ротора могут не совпадать.
История
Гироскоп, изобретенный Леоном Фуко в 1852 году. Реплика, построенная Дюмулен-Фроманом для Вселенской выставки в 1867 году. Музей Национальной консерватории искусств и ремесел, Париж.По сути, гироскоп — это волчок, совмещенный с парой подвесов. Топы были изобретены во многих различных цивилизациях, включая классическую Грецию, Рим и Китай. [4] Большинство из них не использовались в качестве инструментов.
Первый известный прибор, похожий на гироскоп («Вращающееся зеркало» или «Зеркало Серсона») был изобретен Джоном Серсоном в 1743 году. Он использовался в качестве уровня для определения местоположения горизонта в условиях тумана или тумана.
Первый инструмент, который больше походил на настоящий гироскоп, был сделан немцем Иоганном Боненбергером, который впервые написал о нем в 1817 году. Сначала он назвал это «Машиной». [5] [6] Машина Боненбергера была основана на вращающейся массивной сфере. [7] В 1832 году американец Уолтер Р. Джонсон разработал аналогичное устройство, основанное на вращающемся диске. [8] [9] Французский математик Пьер-Симон Лаплас, работающий в Политехнической школе в Париже, рекомендовал машину для использования в качестве учебного пособия, и таким образом она привлекла внимание Леона Фуко. [10] В 1852 году Фуко использовал его в эксперименте по вращению Земли. [11] [12] Это Фуко дал устройству его современное название в эксперименте по наблюдению (греч. skopeein , видеть) вращения Земли (греч. гироскопов , круг или вращение), [13] , который был виден за 8–10 минут до того, как трение замедлило вращающийся ротор.
Сначала он назвал это «Машиной». [5] [6] Машина Боненбергера была основана на вращающейся массивной сфере. [7] В 1832 году американец Уолтер Р. Джонсон разработал аналогичное устройство, основанное на вращающемся диске. [8] [9] Французский математик Пьер-Симон Лаплас, работающий в Политехнической школе в Париже, рекомендовал машину для использования в качестве учебного пособия, и таким образом она привлекла внимание Леона Фуко. [10] В 1852 году Фуко использовал его в эксперименте по вращению Земли. [11] [12] Это Фуко дал устройству его современное название в эксперименте по наблюдению (греч. skopeein , видеть) вращения Земли (греч. гироскопов , круг или вращение), [13] , который был виден за 8–10 минут до того, как трение замедлило вращающийся ротор.
В 1860-х годах появление электродвигателей позволило гироскопу вращаться бесконечно; Это привело к созданию первого прототипа указателей курса и более сложного устройства — гирокомпаса. Первый функциональный гирокомпас был запатентован в 1904 году немецким изобретателем Германом Аншютцем-Кемпфе. [14] Позже в том же году за ним последовал американский Элмер Сперри, и другие страны вскоре осознали военное значение этого изобретения — в эпоху, когда военно-морское мастерство было самым важным показателем военной мощи — и создали свой собственный гироскопическая промышленность. Компания Sperry Gyroscope быстро расширилась и стала поставлять стабилизаторы для самолетов и военно-морских сил, и другие разработчики гироскопов последовали их примеру. [15]
Первый функциональный гирокомпас был запатентован в 1904 году немецким изобретателем Германом Аншютцем-Кемпфе. [14] Позже в том же году за ним последовал американский Элмер Сперри, и другие страны вскоре осознали военное значение этого изобретения — в эпоху, когда военно-морское мастерство было самым важным показателем военной мощи — и создали свой собственный гироскопическая промышленность. Компания Sperry Gyroscope быстро расширилась и стала поставлять стабилизаторы для самолетов и военно-морских сил, и другие разработчики гироскопов последовали их примеру. [15]
В 1917 году компания Chandler из Индианаполиса создала «гироскоп Чендлера» — игрушечный гироскоп с тягой и пьедесталом. Чендлер продолжал производить игрушку, пока компания не была куплена TEDCO inc. в 1982 году. Игрушка-чендлер до сих пор производится TEDCO. [16]
В первые несколько десятилетий 20-го века другие изобретатели пытались (безуспешно) использовать гироскопы в качестве основы для ранних навигационных систем черного ящика, создав стабильную платформу, с которой можно было бы проводить точные измерения ускорения (чтобы обойти необходимость в наблюдения за звездами для расчета положения).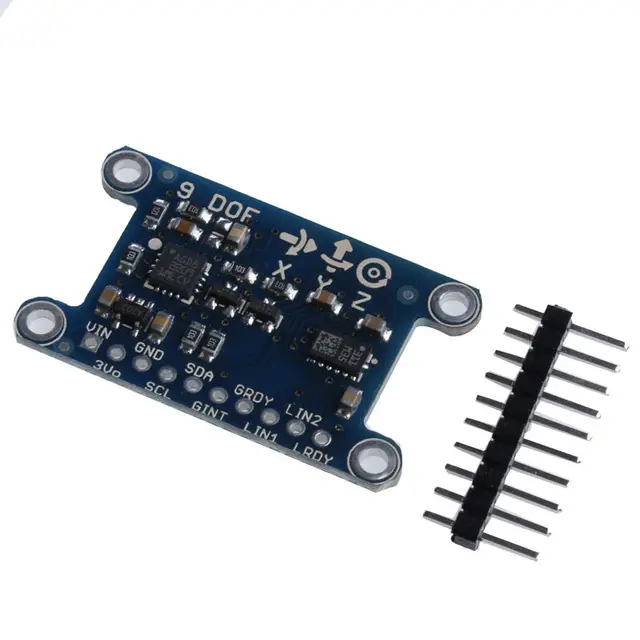 Позже аналогичные принципы были использованы при разработке систем инерциальной навигации для баллистических ракет. [17] [ требуется полное цитирование ]
Позже аналогичные принципы были использованы при разработке систем инерциальной навигации для баллистических ракет. [17] [ требуется полное цитирование ]
Во время Второй мировой войны гироскоп стал основным компонентом авиационных и зенитных прицелов. [18] После войны гонка за миниатюризацию гироскопов для управляемых ракет и систем навигации оружия привела к разработке и производству так называемых сверхмалых гироскопов , которые весили менее 3 унций (85 г) и имели диаметр примерно 1 дюйм (2.5 см). Некоторые из этих миниатюрных гироскопов могут развивать скорость в 24 000 оборотов в минуту менее чем за 10 секунд. [19]
Трехосные гироскопы на основе MEMS также используются в портативных электронных устройствах, таких как планшеты, [20] смартфоны, [21] и умные часы. [22] Это добавляет к возможности определения ускорения по 3 осям, доступной на устройствах предыдущих поколений. Вместе эти датчики обеспечивают 6-компонентное обнаружение движения; ускорение для движения по осям X, Y и Z, а также гироскопы для измерения степени и скорости вращения в пространстве (крен, тангаж и рыскание).Некоторые устройства (например, iPhone [23] ) дополнительно включают магнитометр для обеспечения абсолютных угловых измерений относительно магнитного поля Земли. Более новые инерциальные измерительные блоки на основе МЭМС объединяют до всех девяти осей измерения в одном корпусе интегральной схемы, обеспечивая недорогие и широко доступные датчики движения. [24]
Вместе эти датчики обеспечивают 6-компонентное обнаружение движения; ускорение для движения по осям X, Y и Z, а также гироскопы для измерения степени и скорости вращения в пространстве (крен, тангаж и рыскание).Некоторые устройства (например, iPhone [23] ) дополнительно включают магнитометр для обеспечения абсолютных угловых измерений относительно магнитного поля Земли. Более новые инерциальные измерительные блоки на основе МЭМС объединяют до всех девяти осей измерения в одном корпусе интегральной схемы, обеспечивая недорогие и широко доступные датчики движения. [24]
Варианты
Гиростат
Гиростат — это вариант гироскопа. Он состоит из массивного маховика, скрытого в прочном кожухе. [25] [26] Его поведение на столе или с различными режимами подвески или опоры служит для иллюстрации любопытного обращения обычных законов статического равновесия из-за гиростатического поведения внутреннего невидимого маховика при вращении. быстро. Первый гиростат был разработан лордом Кельвином, чтобы проиллюстрировать более сложное состояние движения вращающегося тела, когда оно свободно перемещается по горизонтальной плоскости, как волчок, вращающийся на тротуаре, или обруч или велосипед на дороге.Кельвин также использовал гиростаты для разработки механических теорий упругости материи и эфира; [27] эти теории сегодня представляют чисто исторический интерес.
быстро. Первый гиростат был разработан лордом Кельвином, чтобы проиллюстрировать более сложное состояние движения вращающегося тела, когда оно свободно перемещается по горизонтальной плоскости, как волчок, вращающийся на тротуаре, или обруч или велосипед на дороге.Кельвин также использовал гиростаты для разработки механических теорий упругости материи и эфира; [27] эти теории сегодня представляют чисто исторический интерес.
В наше время концепция гиростата используется при разработке систем ориентации для орбитальных космических аппаратов и спутников. [28] Например, космическая станция «Мир» имела три пары установленных внутри маховиков, известных как гиродины или гироскопы управления моментом . [29]
В физике существует несколько систем, динамические уравнения которых напоминают уравнения движения гиростата. [30] Примеры включают твердое тело с полостью, заполненной невязкой несжимаемой однородной жидкостью, [31] конфигурацию статического равновесия напряженного упругого стержня в теории упругости, [32] поляризационную динамику световой импульс, распространяющийся через нелинейную среду, [33] система Лоренца в теории хаоса, [34] и движение иона в масс-спектрометре с ловушкой Пеннинга. [35] [ требуется цитата для проверки ]
[35] [ требуется цитата для проверки ]
МЭМС
Гироскоп MEMS основан на идее маятника Фуко и использует вибрирующий элемент, известный как MEMS (микроэлектромеханическая система). Первоначально гироскоп на основе MEMS был разработан Systron Donner Inertial (SDI). Сегодня SDI — крупный производитель гироскопов MEMS.
FOG
Волоконно-оптический гироскоп (ВОГ) — это гироскоп, который использует интерференцию света для обнаружения механического вращения.Датчик представляет собой моток оптоволоконного кабеля, длина которого может составлять более 5 км. Разработка в начале 1970-х годов одномодового оптического волокна с низкими потерями для телекоммуникационной отрасли позволила разработать волоконно-оптические гироскопы с эффектом Саньяка. [ необходима ссылка ] Эффект Саньяка — это тот же принцип, который используется в FOG, как и в RLG
.HRG
Гироскоп с полусферическим резонатором (HRG), также называемый винным гироскопом [ противоречиво ] или гироскопом-грибом, изготавливается с использованием тонкой твердотельной полусферической оболочки, закрепленной толстым стержнем. Эта оболочка приводится в изгибный резонанс электростатическими силами, создаваемыми электродами, которые наносятся непосредственно на отдельные структуры из плавленого кварца, которые окружают оболочку. Гироскопический эффект достигается за счет инерционности изгибных стоячих волн. [ необходима ссылка ]
Эта оболочка приводится в изгибный резонанс электростатическими силами, создаваемыми электродами, которые наносятся непосредственно на отдельные структуры из плавленого кварца, которые окружают оболочку. Гироскопический эффект достигается за счет инерционности изгибных стоячих волн. [ необходима ссылка ]
VSG или CVG
Гироскоп с вибрирующей структурой (VSG), также называемый кориолисовым вибрационным гироскопом (CVG), [36] использует резонатор, сделанный из различных металлических сплавов.Он занимает позицию между недорогим гироскопом MEMS с низкой точностью и более высокоточным и дорогим FOG. Параметры точности увеличиваются за счет использования материалов с низким внутренним демпфированием, вакуумирования резонатора и цифровой электроники для уменьшения зависящего от температуры дрейфа и нестабильности управляющих сигналов. [37]
Высококачественные стеклянные резонаторы используются для точных датчиков, таких как HRG [38] или CRG.
